![[Spanos] Statistical Foundations of Econometric Modelling](https://static.fdocuments.net/doc/165x107/55cf8583550346484b8eda22/spanos-statistical-foundations-of-econometric-modelling.jpg)
Foundations of Statistical Inferencemarchini/bs2a/bs2a_4up.pdf · Foundations of Statistical...
71
Foundations of Statistical Inference Jonathan Marchini Department of Statistics University of Oxford MT 2013 Jonathan Marchini (University of Oxford) BS2a MT 2013 1 / 282 Course arrangements Lectures M.2 and Th.10 SPR1 weeks 1-8 Classes Weeks 3-8 Friday 12-1, 2 × 4-5, 5-6 SPR1/2 Hand in solutions by 12noon on Wednesday SPR1. Class Tutors : Jonathan Marchini, Charlotte Greenan Notes and Problem sheets will be available at www.stats.ox.ac.uk\~marchini\bs2a.html Books Garthwaite, P. H., Jolliffe, I. T. and Jones, B. (2002) Statistical Inference, Oxford Science Publications Leonard, T., Hsu, J. S. (2005) Bayesian Methods, Cambridge University Press. D. R. Cox (2006) Principals of Statistical Inference This course builds on notes from Bob Griffiths and Geoff Nicholls Jonathan Marchini (University of Oxford) BS2a MT 2013 2 / 282 Part A Statistics The majority of the statistics that you have learned up to now falls under the philosophy of classical (or Frequentist) statistics. This theory makes the assumption that we can randomly take repeated samples of data from the same population. You learned about three types of statistical inference Point estimation (Maximum likelihood, bias, consistency, efficiency, information) Interval estimation(exact and approximate intervals using CLT) Hypothesis testing (Neyman-Pearson lemma, uniformly most powerful tests, generalised likelihood ratio tests) You also had an introduction to Bayesian Statistics Posterior inference (Posterior ∝ Likelihood × Prior) Interval estimation(credible intervals, HPD intervals) Priors(conjugate priors, improper priors, Jeffreys’ prior ) Hypothesis testing (marginal likelihoods, Bayes Factors) Jonathan Marchini (University of Oxford) BS2a MT 2013 3 / 282 Frequentist inference In BS2a we develop the theory of point estimation further. Are there families of distributions about which we can make general statements? ⇒ Exponential families. How can we summarise all the information in a dataset about a parameter θ? ⇒ Sufficiency and the Factorization Theorem. What are limits of how well we can estimate a parameter θ? ⇒Cramer-Rao inequality (and bound). How can we find good estimators of a parameter θ? ⇒Rao-Blackwell Theorem and Lehmann-Scheffé Theorem. Jonathan Marchini (University of Oxford) BS2a MT 2013 4 / 282
Transcript of Foundations of Statistical Inferencemarchini/bs2a/bs2a_4up.pdf · Foundations of Statistical...

Foundations of Statistical Inference
Jonathan Marchini
Department of StatisticsUniversity of Oxford
MT 2013
Jonathan Marchini (University of Oxford) BS2a MT 2013 1 / 282
Course arrangements
Lectures M.2 and Th.10 SPR1 weeks 1-8Classes Weeks 3-8 Friday 12-1, 2 × 4-5, 5-6 SPR1/2Hand in solutions by 12noon on Wednesday SPR1. Class Tutors :Jonathan Marchini, Charlotte GreenanNotes and Problem sheets will be available atwww.stats.ox.ac.uk\~marchini\bs2a.html
BooksGarthwaite, P. H., Jolliffe, I. T. and Jones, B. (2002) StatisticalInference, Oxford Science PublicationsLeonard, T., Hsu, J. S. (2005) Bayesian Methods, CambridgeUniversity Press.D. R. Cox (2006) Principals of Statistical Inference
This course builds on notes from Bob Griffiths and Geoff Nicholls
Jonathan Marchini (University of Oxford) BS2a MT 2013 2 / 282
Part A StatisticsThe majority of the statistics that you have learned up to now fallsunder the philosophy of classical (or Frequentist) statistics. This theorymakes the assumption that we can randomly take repeated samples ofdata from the same population.You learned about three types of statistical inference
Point estimation (Maximum likelihood, bias, consistency,efficiency, information)Interval estimation(exact and approximate intervals using CLT)Hypothesis testing (Neyman-Pearson lemma, uniformly mostpowerful tests, generalised likelihood ratio tests)
You also had an introduction to Bayesian StatisticsPosterior inference (Posterior ∝ Likelihood × Prior)Interval estimation(credible intervals, HPD intervals)Priors(conjugate priors, improper priors, Jeffreys’ prior )Hypothesis testing (marginal likelihoods, Bayes Factors)
Jonathan Marchini (University of Oxford) BS2a MT 2013 3 / 282
Frequentist inference
In BS2a we develop the theory of point estimation further.Are there families of distributions about which we can makegeneral statements? ⇒ Exponential families.How can we summarise all the information in a dataset about aparameter θ? ⇒ Sufficiency and the Factorization Theorem.What are limits of how well we can estimate a parameter θ?⇒Cramer-Rao inequality (and bound).How can we find good estimators of a parameter θ?⇒Rao-Blackwell Theorem and Lehmann-Scheffé Theorem.
Jonathan Marchini (University of Oxford) BS2a MT 2013 4 / 282

Bayesian inferenceParameters are treated as random variables. Inference starts byspecifying a prior distribution on θ based on prior beliefs. Havingcollected some data we use Bayes’ Theorem to update our beliefs toobtain a posterior distribution.Quick Example Suppose I give a coin and tell you that it is bit biased.We might use a Beta(4,4) distribution to represent our beliefs about theθ. If we observe 30 heads and 10 tails we can use probability theory toinfer a posterior distribution for θ of Beta(34, 14).
0.0 0.2 0.4 0.6 0.8 1.0
0.0
0.5
1.0
1.5
2.0
Prior distribution
e
0.0 0.2 0.4 0.6 0.8 1.0
01
23
45
6
Posterior distribution
e
Jonathan Marchini (University of Oxford) BS2a MT 2013 5 / 282
Computational techniques for Bayesian inference
It is not always possible to obtain an analytic solution when doingBayesian Inference, so we study approximate computationaltechniques in this course.These include
Markov chain Monte Carlo (MCMC) methodsApproximations to marginal likelihoods NEW
Variational ApproximationsLaplace approximationsBayesian Information Criterion (BIC)
The EM algorithm NEWuseful in Frequentist and Bayesian inference of missing dataproblems
Jonathan Marchini (University of Oxford) BS2a MT 2013 6 / 282
Decision theory
Quick Example You have been exposed to a deadly virus. About 1/3of people who are exposed to the virus are infected by it, and all thoseinfected by it die unless they receive a vaccine. By the time anysymptoms of the virus show up, it is too late for the vaccine to work.You are offered a vaccine for £500. Do you take it or not?
The most likely scenario is that you don’t have the virus but basinga decision on this ignores the costs (or loss) associated with thedecisions. We would put a very high loss on dying!Decision theory allows us to formalise this problem.Closely connected to Bayesian ideas. Applicable to pointestimation and hypothesis testing. Inference is based onspecifying a number of possible actions we might take and a lossassociated with each action. The theory involves determining arule to make decisions using an overall measure of loss.
Jonathan Marchini (University of Oxford) BS2a MT 2013 7 / 282
Notation
X ,Y ,Z Capital letters for random variables.x , y , z Lower case letters for realisations of random variables.EX (·) Expectation with respect to the random variable X .
φ = {φ1, . . . , φk} Sometimes we will use bold symbols to denote avector of parameters.
Jonathan Marchini (University of Oxford) BS2a MT 2013 8 / 282
Lecture 1 - Exponential families
Jonathan Marchini (University of Oxford) BS2a MT 2013 9 / 282
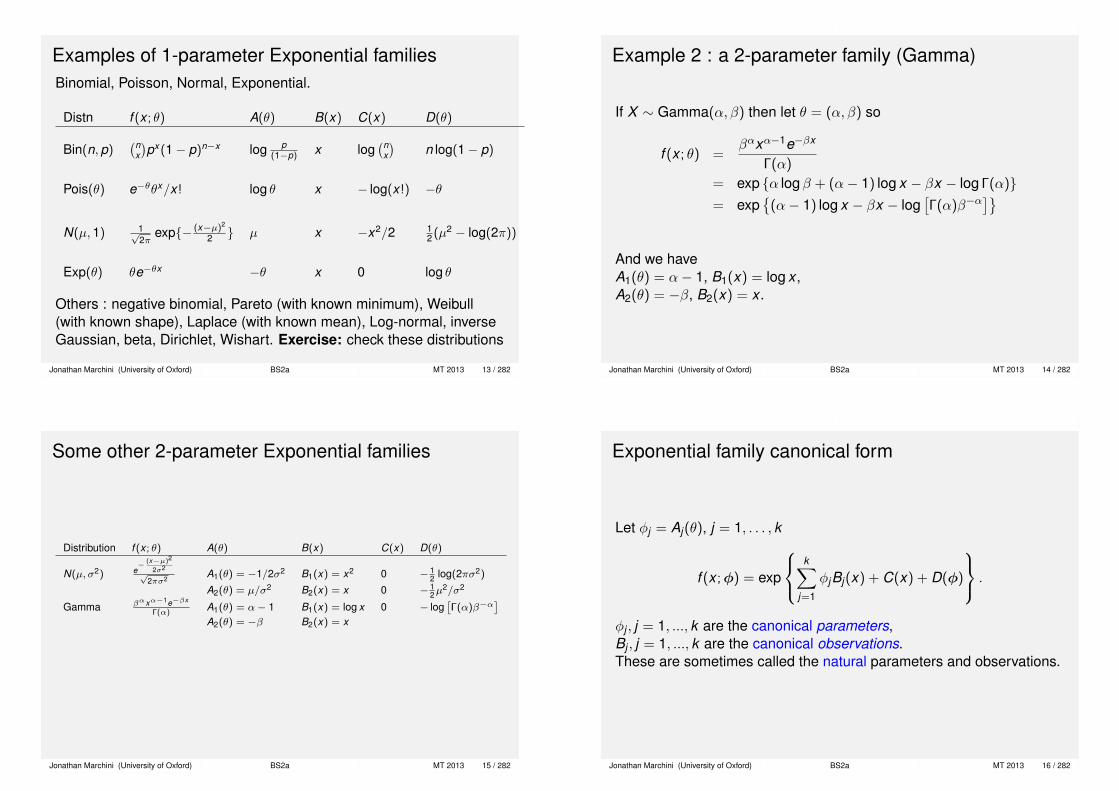
Parametric families
f (x ; θ), θ ∈ Θ, probability density of a random variable (rv) which couldbe discrete or continuous. θ can be 1-dimensional or of higherdimension. Equivalent notation:fθ(x),f (x | θ),f (x , θ).Likelihood L(θ; x) = f (x ; θ) and log-likelihood `(θ; x) = log(L).Examples1. Normal N(θ,1) : f (x ; θ) = 1√
2πe−
12 (x−θ)2
x ∈ R, θ ∈ R.
2. Poisson: f (x ; θ) = θx
x! e−θ, x = 0,1,2, . . . , θ > 0.
3. Regression:f (y ; θ) =
∏ni=1
1√2πσ
e−12 (yi−
∑pj=1 xijβj )
2, y ∈ Rn, σ > 0, β ∈ Rp. θ = {β, σ}.
Jonathan Marchini (University of Oxford) BS2a MT 2013 10 / 282
Exponential families of distributions
Definition 1 GJJ 2.6, DRC 2.3A rv X belongs to a k -parameter exponential family if its probabilitydensity function (pdf) can be written as
f (x ; θ) = exp
k∑
j=1
Aj(θ)Bj(x) + C(x) + D(θ)
,
where x ∈ χ, θ ∈ Θ, A1(θ), . . . ,Ak (θ),D(θ) are functions of θ alone andB1(x),B2(x), . . . ,Bk (x),C(x) are well behaved functions of x alone.
Exponential families are widely used in practice - for example ingeneralised linear models (see BS1a).
Jonathan Marchini (University of Oxford) BS2a MT 2013 11 / 282
Example 1 : Poisson
We want to put the Poisson distribution in the form (with k = 1)
f (x ; θ) = exp {A(θ)B(x) + C(x) + D(θ)} ,
e−θθx/x! = e−θ+x log θ−log x!
= exp {(log θ)x − log x!− θ}
So A(θ) = log θ,B(x) = x ,C(x) = − log x!,D(θ) = −θ.
Jonathan Marchini (University of Oxford) BS2a MT 2013 12 / 282
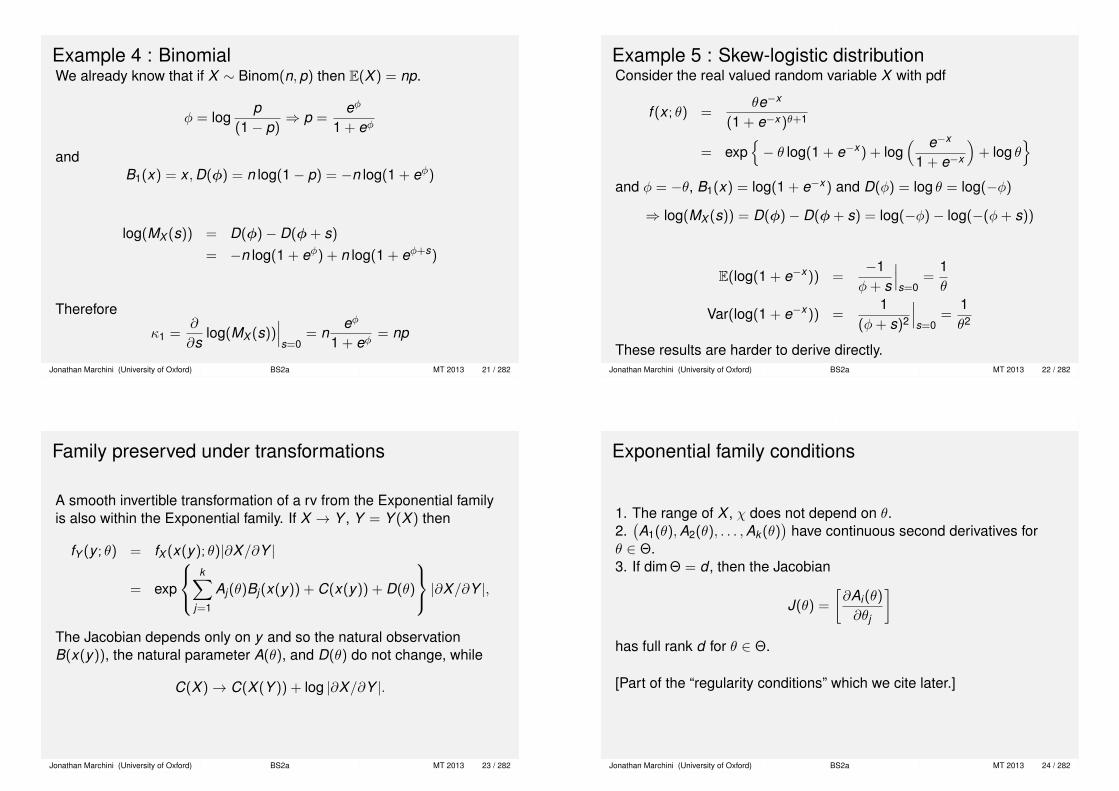
Examples of 1-parameter Exponential familiesBinomial, Poisson, Normal, Exponential.
Distn f (x ; θ) A(θ) B(x) C(x) D(θ)
Bin(n,p)(n
x
)px (1− p)n−x log p
(1−p) x log(n
x
)n log(1− p)
Pois(θ) e−θθx/x! log θ x − log(x!) −θ
N(µ,1) 1√2π
exp{− (x−µ)2
2 } µ x −x2/2 12 (µ2 − log(2π))
Exp(θ) θe−θx −θ x 0 log θ
Others : negative binomial, Pareto (with known minimum), Weibull(with known shape), Laplace (with known mean), Log-normal, inverseGaussian, beta, Dirichlet, Wishart. Exercise: check these distributions
Jonathan Marchini (University of Oxford) BS2a MT 2013 13 / 282
Example 2 : a 2-parameter family (Gamma)
If X ∼ Gamma(α, β) then let θ = (α, β) so
f (x ; θ) =βαxα−1e−βx
Γ(α)
= exp {α logβ + (α− 1) log x − βx − log Γ(α)}= exp
{(α− 1) log x − βx − log
[Γ(α)β−α
]}And we haveA1(θ) = α− 1, B1(x) = log x ,A2(θ) = −β, B2(x) = x .
Jonathan Marchini (University of Oxford) BS2a MT 2013 14 / 282
Some other 2-parameter Exponential families
Distribution f (x ; θ) A(θ) B(x) C(x) D(θ)
N(µ, σ2) e− (x−µ)2
2σ2√
2πσ2A1(θ) = −1/2σ2 B1(x) = x2 0 − 1
2 log(2πσ2)
A2(θ) = µ/σ2 B2(x) = x 0 − 12µ
2/σ2
Gamma βαxα−1e−βx
Γ(α)A1(θ) = α− 1 B1(x) = log x 0 − log
[Γ(α)β−α
]A2(θ) = −β B2(x) = x
Jonathan Marchini (University of Oxford) BS2a MT 2013 15 / 282
Exponential family canonical form
Let φj = Aj(θ), j = 1, . . . , k
f (x ;φ) = exp
k∑
j=1
φjBj(x) + C(x) + D(φ)
.
φj , j = 1, ..., k are the canonical parameters,Bj , j = 1, ..., k are the canonical observations.These are sometimes called the natural parameters and observations.
Jonathan Marchini (University of Oxford) BS2a MT 2013 16 / 282

Since ∫R
f (x ;φ)dx = 1
we have
∫R
exp
k∑
j=1
φjBj(x) + C(x) + D(φ)
dx = 1
exp{D(φ)}∫R
exp
k∑
j=1
φjBj(x) + C(x)
dx = 1
∫R
exp
k∑
j=1
φjBj(x) + C(x)
dx = exp{−D(φ)}
Jonathan Marchini (University of Oxford) BS2a MT 2013 17 / 282
∫R
exp
k∑
j=1
φjBj(x) + C(x)
dx = exp{−D(φ)}
Differentiate with respect to φi .∫R
Bi (x) exp
k∑
j=1
φjBj (x) + C(x)
dx = − ∂
∂φiD(φ) exp{−D(φ)}
∫R
Bi (x) exp
k∑
j=1
φjBj (x) + C(x) + D(φ)
dx = − ∂
∂φiD(φ)
E[Bi (X )] = − ∂
∂φiD(φ)
Exercise Cov[Bi (X ),Bj (X )] = − ∂2
∂φi∂φjD(φ)
Exercise Var[Bi (X )] = − ∂2
∂φ2i
D(φ)
Jonathan Marchini (University of Oxford) BS2a MT 2013 18 / 282
Example 3 : GammaWe already know that if X ∼ Gamma(α, β) the E(X ) = α
β andVar(X ) = α
β2 .
βαxα−1e−βx
Γ(α)= exp {−βx + (α− 1) log x + α logβ − log Γ(α)}
φ1 = −β, φ2 = α− 1, B1(x) = x , B2(x) = log x
D(φ) = α logβ − log Γ(α)
= (φ2 + 1) log(−φ1)− log Γ(φ2 + 1)
E[X ] = − ∂
∂φ1D(φ) = −(φ2 + 1)
φ1=α
β
Var[X ] = − ∂2
∂φ21
D(φ) = −(φ2 + 1)
φ21
=α
β2
Exercise: show E[log X ] = ψ0(α)− log(β) where ψ0 is the digammafunction, and Γ′(α) = Γ(α)ψ0(α).
Jonathan Marchini (University of Oxford) BS2a MT 2013 19 / 282
Cumulant Generating FunctionIn a scalar canonical exponential family (k = 1)
EX [esB(X)] =
∫R
exp {(φ+ s)B(x) + C(x) + D(φ)}dx
= exp{D(φ)− D(φ+ s)}
If MB(X)(s) is the Moment Generating Function (mgf) for B(X ), then
log(MB(X)(s)) = D(φ)− D(φ+ s)
This is the cumulant generating function (defined as the log of the mgf)for the cumulants of B(X ) i.e.
log(MB(X)(s)) =∞∑
r=1
κr sr/r !
where κ1 = E(B(X )) and κ2 = V (B(X )) Exercise : prove thisJonathan Marchini (University of Oxford) BS2a MT 2013 20 / 282
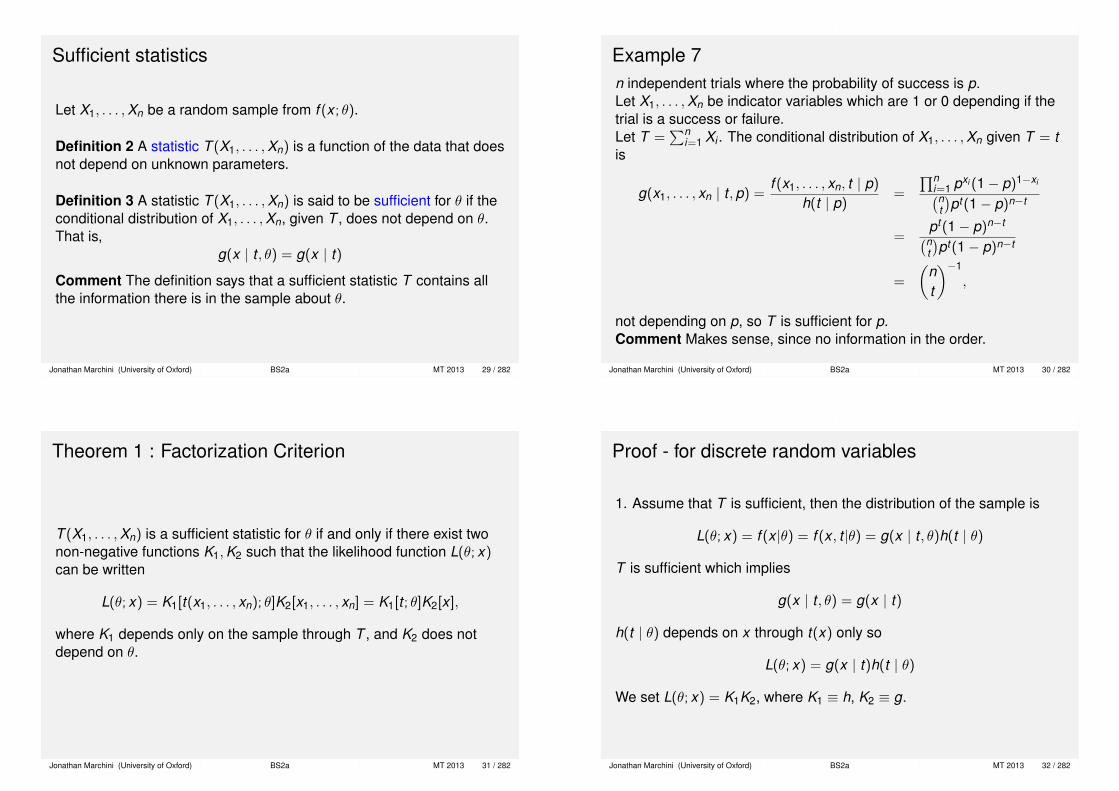
Example 4 : BinomialWe already know that if X ∼ Binom(n,p) then E(X ) = np.
φ = logp
(1− p)⇒ p =
eφ
1 + eφ
andB1(x) = x ,D(φ) = n log(1− p) = −n log(1 + eφ)
log(MX (s)) = D(φ)− D(φ + s)
= −n log(1 + eφ) + n log(1 + eφ+s)
Therefore
κ1 =∂
∂slog(MX (s))
∣∣∣s=0
= neφ
1 + eφ= np
Jonathan Marchini (University of Oxford) BS2a MT 2013 21 / 282
Example 5 : Skew-logistic distributionConsider the real valued random variable X with pdf
f (x ; θ) =θe−x
(1 + e−x )θ+1
= exp{− θ log(1 + e−x ) + log
( e−x
1 + e−x
)+ log θ
}and φ = −θ, B1(x) = log(1 + e−x ) and D(φ) = log θ = log(−φ)
⇒ log(MX (s)) = D(φ)− D(φ + s) = log(−φ)− log(−(φ+ s))
E(log(1 + e−x )) =−1φ+ s
∣∣∣s=0
=1θ
Var(log(1 + e−x )) =1
(φ+ s)2
∣∣∣s=0
=1θ2
These results are harder to derive directly.Jonathan Marchini (University of Oxford) BS2a MT 2013 22 / 282
Family preserved under transformations
A smooth invertible transformation of a rv from the Exponential familyis also within the Exponential family. If X → Y , Y = Y (X ) then
fY (y ; θ) = fX (x(y); θ)|∂X/∂Y |
= exp
k∑
j=1
Aj(θ)Bj(x(y)) + C(x(y)) + D(θ)
|∂X/∂Y |,
The Jacobian depends only on y and so the natural observationB(x(y)), the natural parameter A(θ), and D(θ) do not change, while
C(X )→ C(X (Y )) + log |∂X/∂Y |.
Jonathan Marchini (University of Oxford) BS2a MT 2013 23 / 282
Exponential family conditions
1. The range of X , χ does not depend on θ.2.(A1(θ),A2(θ), . . . ,Ak (θ)
)have continuous second derivatives for
θ ∈ Θ.3. If dim Θ = d , then the Jacobian
J(θ) =
[∂Ai(θ)
∂θj
]has full rank d for θ ∈ Θ.
[Part of the “regularity conditions” which we cite later.]
Jonathan Marchini (University of Oxford) BS2a MT 2013 24 / 282

The family is minimal if no linear combination exists such that
λ0 + λ1B1(x) + · · ·+ λkBk (x) = 0
for all x ∈ χ.The dimension of the family is defined to be d , the rank of J(θ).A minimal exponential family is said to be curved when d < k andlinear when d = k . We refer to a (k ,d) curved exponential family.Example 6 (X1,X2) independent, normal, unit variance, means(θ, c/θ), c known.
log f (x ; θ) = x1θ + cx2/θ − θ2/2− c2θ−2/2 + ...
is a (2,1) curved exponential family.
Jonathan Marchini (University of Oxford) BS2a MT 2013 25 / 282
Linear relations among A’s do not generate curvature
Take a k -parameter exponential family and impose A1 = aA2 + b forconstants a and b.
k∑i=1
AiBi + C + D =k∑
i=3
AiBi + A2(aB1 + B2) + (C + bB1) + D
This gives a k − 1 parameter EF, not a (k , k − 1)-CEF.
Jonathan Marchini (University of Oxford) BS2a MT 2013 26 / 282
Examples not in an exponential family
1 Uniform on [0, θ], θ > 0.
f (x ; θ) =1θ, x ∈ [0, θ] θ > 0
2 The Cauchy distribution
f (x ; θ) = [π(1 + (x − θ)2)]−1, x ∈ R
Other examples include the F-distribution, hypergeometricdistribution and logistic distribution.
Jonathan Marchini (University of Oxford) BS2a MT 2013 27 / 282
Lecture 2 - Sufficiency, Factorization Theorem, Minimal sufficiency
Jonathan Marchini (University of Oxford) BS2a MT 2013 28 / 282
Sufficient statistics
Let X1, . . . ,Xn be a random sample from f (x ; θ).
Definition 2 A statistic T (X1, . . . ,Xn) is a function of the data that doesnot depend on unknown parameters.
Definition 3 A statistic T (X1, . . . ,Xn) is said to be sufficient for θ if theconditional distribution of X1, . . . ,Xn, given T , does not depend on θ.That is,
g(x | t , θ) = g(x | t)
Comment The definition says that a sufficient statistic T contains allthe information there is in the sample about θ.
Jonathan Marchini (University of Oxford) BS2a MT 2013 29 / 282
Example 7n independent trials where the probability of success is p.Let X1, . . . ,Xn be indicator variables which are 1 or 0 depending if thetrial is a success or failure.Let T =
∑ni=1 Xi . The conditional distribution of X1, . . . ,Xn given T = t
is
g(x1, . . . , xn | t ,p) =f (x1, . . . , xn, t | p)
h(t | p)=
∏ni=1 pxi (1− p)1−xi(n
t
)pt (1− p)n−t
=pt (1− p)n−t(nt
)pt (1− p)n−t
=
(nt
)−1
,
not depending on p, so T is sufficient for p.Comment Makes sense, since no information in the order.
Jonathan Marchini (University of Oxford) BS2a MT 2013 30 / 282
Theorem 1 : Factorization Criterion
T (X1, . . . ,Xn) is a sufficient statistic for θ if and only if there exist twonon-negative functions K1,K2 such that the likelihood function L(θ; x)can be written
L(θ; x) = K1[t(x1, . . . , xn); θ]K2[x1, . . . , xn] = K1[t ; θ]K2[x ],
where K1 depends only on the sample through T , and K2 does notdepend on θ.
Jonathan Marchini (University of Oxford) BS2a MT 2013 31 / 282
Proof - for discrete random variables
1. Assume that T is sufficient, then the distribution of the sample is
L(θ; x) = f (x |θ) = f (x , t |θ) = g(x | t , θ)h(t | θ)
T is sufficient which implies
g(x | t , θ) = g(x | t)
h(t | θ) depends on x through t(x) only so
L(θ; x) = g(x | t)h(t | θ)
We set L(θ; x) = K1K2, where K1 ≡ h, K2 ≡ g.
Jonathan Marchini (University of Oxford) BS2a MT 2013 32 / 282

2. Suppose L(θ; x) = f (x | θ) = K1[t ; θ]K2[x ].Then
h(t | θ) =∑
{x :T (x)=t}
f (x , t | θ) =∑
{x :T (x)=t}
L(θ; x)
= K1[t ; θ]∑
{x :T (x)=t}
K2(x).
Thus
g(x | t , θ) =f (x , t | θ)
h(t | θ)=
L(θ; x)
h(t | θ)=
K2[x ]∑{x :T (x)=t} K2(x)
,
not depending on θ. (K1 cancels out in numerator and denominator.)
Jonathan Marchini (University of Oxford) BS2a MT 2013 33 / 282
Minimal sufficiencyIn general, we can envisage a sequence of functionsT1(X ),T2(X ),T3(X ), . . . such that Tj(X ) is a function of Tj−1(X ) (j ≥ 2)where moving along the sequence gains progressive reductions ofdata, and if Tj(X ) is sufficient for θ, then so is Ti(X ) i < j . Typicallythere will be a last member Tk (X ) that is sufficient, with Ti(X ) notsufficient for i > k . Then Tk (X ) is minimal sufficient
Example 7 (cont.) Consider n = 3 Bernoulli trials1 T1(X ) = (X1,X2,X3) (the individual sequences of trials)2 T2(X ) = (X1,
∑3i=1 Xi) (the 1st random variable and the total sum).
3 T3(X ) =∑3
i=1 Xi (the total sum)4 T4(X ) = I(T3(X ) = 0) (I is indicator function; Exercise Prove T4
not sufficient)
Definition 4 A statistic is minimal sufficient if it can be expressed as afunction of every other sufficient statistic.
Jonathan Marchini (University of Oxford) BS2a MT 2013 34 / 282
Example 7 (cont.) : Minimal sufficiencyn Bernoulli trials with T =
∑ni=1 Xi . Suppose T above is not minimal
sufficient but another statistic U is MS.Then U can be given as afunction of T (and not vis versa or T is MS) and there exist t1 6= t2values of T so that U(t1) = U(t2)(ie T → U is many to one so U → Tis not a function, and we assume for the moment no other t makeU(t) = U(t1)).The event U = u is the event T ∈ {t1, t2}. Let x1, ...xncontain t1 successes. Then
g(x1, . . . , xn|u,p) = g(x1, . . . , xn|t1,p)P(t1|u,p)
= g(x1, . . . , xn|t1)P(T = t1|T ∈ {t1, t2})
=pt1(1− p)n−t1(n
t1
)pt1(1− p)n−t1 +
(nt2
)pt2(1− p)n−t2
which depends on p, so U is not sufficient, a contradiction, and henceT must be MS (similar reasoning for multiple ti ).
Jonathan Marchini (University of Oxford) BS2a MT 2013 35 / 282
Minimal sufficiency and partitions of the sample space
Intuitively, a minimal sufficient statistic most efficiently captures allpossible information about the parameter θ.Any statistic T (X ) partitions the sample space into subsets and ineach subset T (X ) has constant value.Minimal sufficient statistics correspond to the coarsest possiblepartition of the sample space.In the example of n = 3 Bernoulli trials consider the following 4statistics and the partitions they induce.
Jonathan Marchini (University of Oxford) BS2a MT 2013 36 / 282

TTT
TTH
THT
THH
HTT
HHT
HTH
HHH
TTT
TTH
THT
THH
HTT
HHT
HTH
HHH
TTT
TTH
THT
THH
HTT
HHT
HTH
HHH
TTT
TTH
THT
THH
HTT
HHT
HTH
HHH
T1(X) = X1,X2,X3( )
T3(X) = Xii=1
3
∑ T4 (X) = I T3(X) = 0( )
T2 (X) = X1, Xii=1
3
∑⎛⎝⎜
⎞⎠⎟
Jonathan Marchini (University of Oxford) BS2a MT 2013 37 / 282
Lemma 1 : Lehmann-Scheffé partitions
Consider the partition of the sample space defined by putting x and yinto the same class of the partition if and only if
L(θ; y)/L(θ; x) = f (y | θ)/f (x | θ) = m(x , y).
Then any statistic corresponding to this partition is minimal sufficient.
Comment This Lemma tells us how to define partitions thatcorrespond to minimal sufficient statistics. It says that ratios oflikelihoods of two values x and y in the same partition (and hencesame statistic value) should not depend on θ.
Jonathan Marchini (University of Oxford) BS2a MT 2013 38 / 282
Proof (for discrete RVs)
1. Sufficiency.Suppose T is such a statistic
g(x |t , θ) =f (x | θ)
f (t | θ)=
f (x | θ)∑y∈τ f (y | θ)
, τ = {y : T (y) = t}
=f (x | θ)∑
y∈τ f (x | θ)m(x , y)
=[∑
y∈τm(x , y)
]−1
which does not depend on θ. Hence the partition D is sufficient.
Jonathan Marchini (University of Oxford) BS2a MT 2013 39 / 282
2. Minimal sufficiency.Now suppose U is any other sufficient statistic and that U(x) = U(y)for some pair of values (x , y). If we can show that U(x) = U(y) impliesT (x) = T (y), then the Lehmann-Scheffé partition induced by Tincludes the partition based on any other sufficient statistic.In otherwords, T is a function of every other sufficient statistic, and so must beminimal sufficient.Since U is sufficient we have
L(θ; y)
L(θ; x)=
K1[u(y); θ]K2[y ]
K1[u(x); θ]K2[x ]=
K2[y ]
K2[x ]
which does not depend on θ. So the statistic U produces a partition atleast as fine as that induced by T , and the result is proved.
Jonathan Marchini (University of Oxford) BS2a MT 2013 40 / 282
Sufficiency in an exponential family
Random Sample X1, . . . ,XnLikelihood
L(θ; x) =n∏
i=1
f (xi ; θ)
=n∏
i=1
exp
k∑
j=1
Aj(θ)Bj(xi) + C(xi) + D(θ)
= exp
k∑
j=1
Aj(θ)
(n∑
i=1
Bj(xi)
)+ nD(θ) +
n∑i=1
C(xi)
.
Exponential family form again.
Jonathan Marchini (University of Oxford) BS2a MT 2013 41 / 282
Sufficiency in an exponential familySuppose the family is in canonical form so φj = Aj(θ), and lettj =
∑ni=1 Bj(xi), C(x) =
∑ni=1 C(xi).
L(θ; x) = exp
k∑
j=1
φj tj + nD(θ) + C(x)
.
By the factorization criterion t1, . . . , tk are sufficient statistics forφ1, . . . , φk . In fact, we do not need canonical form. If
L(θ; x) = exp
k∑
j=1
Aj(θ)tj + nD(θ) + C(x)
is a minimal k -dimensional linear exponential family then (by theregularity conditions above) t1, . . . , tk are minimal sufficient forθ1, . . . , θk . Minimal sufficiency is verified using Lemma 1.
Jonathan Marchini (University of Oxford) BS2a MT 2013 42 / 282
Lecture 3 - Estimators, Minimum Variance Unbiased Estimators andthe Cramér-Rao Lower Bound.
Jonathan Marchini (University of Oxford) BS2a MT 2013 43 / 282
Estimators
Definition 5 A point estimate for θ is a statistic of the data.
θ = θ(x) = t(x1, . . . , xn).
Definition 6 An interval estimate is a set valued function C(X ) ⊆ Θsuch that θ ∈ C(X ) with a specified probability.
Definition 7 : Maximum likelihood estimationIf L(θ) is differentiable and there is a unique maximum in the interior ofθ ∈ Θ, then the MLE θ is the solution of
∂
∂θL(θ; x) = 0 or
∂
∂θ`(θ) = 0,
where `(θ) = log L(θ; x).
Jonathan Marchini (University of Oxford) BS2a MT 2013 44 / 282

Lemma 2 : MLEs and exponential families
Consider a k -dimensional exponential family in canonical form
L(θ; x) = exp
k∑
j=1
φj
(n∑
i=1
Bj(xi)
)+ nD(φ) +
n∑i=1
C(xi)
.
Let Tj(X ) =∑n
i=1 Bj(Xi), j = 1, . . . , k . If the realized data are X = x ,then the statistics evaluated on the data are Tj(x) = tj .The MLEs of φ1, . . . , φk are the solution of
tj = EX (Tj), j = 1, . . . , k .
i.e. set the expected values of the sufficient statistics equal to theirrealised values and solve for φj . [If the family is not in canonical form,there is a similar slightly more complicated matrix equation]
Jonathan Marchini (University of Oxford) BS2a MT 2013 45 / 282
Proof
` = log L = const +k∑
j=1
φj tj + nD(φ)
⇒ ∂
∂φj` = tj + n
∂
∂φjD(φ)
However, since EX [Bi(X )] = − ∂∂φi
D(φ) and Tj(X ) =∑n
i=1 Bj(Xi) weknow that
EX [Tj ] = −n∂
∂φjD(φ), so
∂
∂φj` = tj − EX (Tj) = 0
is equivalent to tj = EX (Tj).
Jonathan Marchini (University of Oxford) BS2a MT 2013 46 / 282
Bias, Variance, Mean Squared Error
Tn = T (X1, . . . ,Xn) is a statistic.Definition 8 Tn is unbiased for a function g(θ) if
EX (Tn) =
∫χ
tn(x)f (x ; θ)dx = g(θ), for all θ ∈ Θ.
Definition 9 The bias of an estimator Tn is bias(Tn) = EX [Tn − g(θ)]Definition 10 Tn is a consistent estimator if
∀ε > 0,P(|Tn − θ| > ε)→ 0 as n→∞.Definition 11 The Mean Squared Error (MSE) of Tn is
MSE(Tn) = EX [Tn − g(θ)]2 = VX (Tn) + [bias(Tn)]2
Example 10 N(µ, σ2). µ = X and S2 = (n − 1)−1∑ni=1(Xi − X
)2 areunbiased estimates of µ and σ2.
Jonathan Marchini (University of Oxford) BS2a MT 2013 47 / 282
Minimum Variance Unbiased Estimators (MVUE)
If we want to find a good estimator then one obvious strategy is totry to find estimators that minimise MSE. This is often difficult.For example, if we choose the estimator θ = θ0 then this hasMSE=0 when θ = θ0, so no other estimator can be uniformly bestunless it has zero MSE everywhere.If we restrict attention to unbiased estimators then the situationbecomes more tractable. In this case, MSE reduces to thevariance of the estimator and we can focus on minimising thevariance of estimators. That is, we search for minimum varianceunbiased estimators (MVUE).
Jonathan Marchini (University of Oxford) BS2a MT 2013 48 / 282

Theorem 2 : Cramér-Rao inequality (and bound).If θ is an unbiased estimator of θ, then subject to certain regularityconditions on f (x ; θ), we have
Var(θ) ≥ I−1θ .
where Iθ, the Fisher information, is given by
Iθ = −E[∂2
∂θ2 `(θ)
]Comment This bound tells us the minimum possible variance. If anestimator achieves the bound then it is MVUE. There is no guaranteethat the bound will be attainable. In many cases it is attainableasymptotically. Intuitively, the more ‘information’ we have about θ, thelarger Iθ will be and lowest possible variance of the estimator will besmaller.
Jonathan Marchini (University of Oxford) BS2a MT 2013 49 / 282
Regularity conditions for CRLB
We will not be concerned with the details of the required regularityconditions.The main reason they are needed is to ensure that it is ok tointerchange integration and differentiation during parts of theproof.One condition that is often easy to check is that the range of the rvX must not depend on θ. So for example, the result can not beapplied when working with the uniform distribution U[0, θ] and wewish to estimate θ.
Jonathan Marchini (University of Oxford) BS2a MT 2013 50 / 282
In order to prove the CRLB we will need to use a few results.
Proposition 1 : Variance-Covariance inequalityLet U and V be scalar rv. Then
cov(U,V )2 ≤ var(U)var(V )
with equality if and only if U = aV + b for constants and a 6= 0.
Jonathan Marchini (University of Oxford) BS2a MT 2013 51 / 282
The Fisher Information Iθ, which is used in the Cramér-Rao lowerbound, can be expressed in two different forms.
Lemma 3 Under regularity conditions
Iθ = −E[∂2
∂θ2 `(θ)
]= E
[(∂`
∂θ
)2]
= Var[S(X ; θ)],
where the score function s(x ; θ) is defined as
s(x ; θ) =∂
∂θ`(θ) =
f ′(x ; θ)
f (x ; θ)
Jonathan Marchini (University of Oxford) BS2a MT 2013 52 / 282
Lemma 3 - ProofWe need to prove −E
[∂2
∂θ2 `(θ)
]= E
[(∂`
∂θ
)2]
.
∂2`
∂θ2 =∂
∂θ
{1L∂L∂θ
} [since
∂`
∂θ=
1L∂L∂θ
]= − 1
L2
(∂L∂θ
)2
+1L∂2L∂θ2
= −(∂`
∂θ
)2
+1L
(∂2L∂θ2
)The second term has expectation zero because
E[
1L
(∂2L∂θ2
)]=
∫1L∂2L∂θ2 Ldx =
∫∂2L∂θ2 dx =
∂2
∂θ2
∫Ldx = 0
The alternative form Iθ = Var[S(X ; θ)] follows from E[∂`∂θ
]= 0.
Jonathan Marchini (University of Oxford) BS2a MT 2013 53 / 282
Proof of the CRLB
We consider only unbiased estimators, so we have
E(θ) =
∫χθ(x)L(θ; x)dx = θ
Differentiate both sides w.r.t. θ∫χθ∂L∂θ
dx = 1
Now∂L∂θ
= L∂`
∂θso
1 =
∫χθ∂`
∂θLdx = E
[θ∂`
∂θ
]
Jonathan Marchini (University of Oxford) BS2a MT 2013 54 / 282
Proof of the CRLBNow we use the inequality that for two random variables U,V
Cov[U,V ]2 ≤ Var[U]Var[V ]
with U = θ, V = ∂`∂θ .We know Var[ ∂`∂θ ] = Iθ. Must show Cov[U,V ] = 1.
Cov[U,V ] = E[UV ]− E[U]E[V ], E[U] = θ, E[θ∂`
∂θ
]= 1
E[V ] =
∫χ
∂`
∂θLdx =
∫χ
∂L∂θ
dx =∂
∂θ
[∫χ
Ldx]
=∂
∂θ[1] = 0
Var[θ] = Var[U] ≥ Cov[U,V ]2
Var[V ]=
12
Iθ= I−1
θ
Jonathan Marchini (University of Oxford) BS2a MT 2013 55 / 282
Information in a sample of size n.
If we have n iid observations then
f (x ; θ) =n∏
i=1
f (xi ; θ)
and the Fisher information is
in(θ) = −E[∂2
∂θ2 `(θ)
]= −
∫ n∑i=1
∂2
∂θ2 log f (xi ; θ)f (x ; θ)dx = ni1(θ).
That is, i1(θ) is calculated from the density as
i1(θ) = −∫
∂2
∂θ2 log f (x ; θ)f (x ; θ)dx
Jonathan Marchini (University of Oxford) BS2a MT 2013 56 / 282

Lecture 4 - Consequences of the Cramér-Rao Lower Bound.Searching for a MVUE. Rao-Blackwell Theorem, Lehmann-Scheffé
Theorem.
Jonathan Marchini (University of Oxford) BS2a MT 2013 57 / 282
Question Under what conditions will we be able to attain theCramér-Rao bound and find a MVUE?
Corollary 1 There exists an unbiased estimator θ which attains the CRlower bound (under regularity conditions) if and only if
∂`
∂θ= Iθ(θ − θ)
Proof In the CR proof
Cov[U,V ]2 ≤ Var[U]Var[V ]
and the lower bound is attained if and only equality is achieved. IfU = θ,V = ∂`
∂θ , the equality occurs when ∂`∂θ = c + d θ, where c,d are
constants. E[V ] = 0 so c = −dθ and ∂`∂θ = d(θ − θ).
Jonathan Marchini (University of Oxford) BS2a MT 2013 58 / 282
Multiply by ∂`/∂θ and take expectations.
E
[(∂`
∂θ
)2]
= dE[∂`
∂θθ
]− dθE
[∂`
∂θ
]= d × 1− 0
The LHS is Iθ so we have d = Iθ and
∂`
∂θ= Iθ(θ − θ)
Jonathan Marchini (University of Oxford) BS2a MT 2013 59 / 282
Question What is the relationship between the CRLB and exponentialfamilies?
Corollary 2 If there exists an unbiased estimator θ(X ) which attainsthe CR lower bound (under regularity conditions) it follows that X mustbe in an exponential familyProof Taking n = 1
∂ log f (x ; θ)
∂θ=∂`
∂θ= Iθ(θ − θ)
andlog f (x ; θ) = θA(θ) + D(θ) + C(x)
which is an exponential family form. The constant of integration C(x) isa function of x .
Jonathan Marchini (University of Oxford) BS2a MT 2013 60 / 282
Question What is the relationship between the CRLB and MLEs?
Corollary 3 Suppose θ(X ) is an unbiased estimator that attains theCRLB, and so is a MVUE. Suppose that the MLE θ is a solution to∂`/∂θ = 0 (so, not on boundary). Then θ = θ.
i.e. if the CRLB is attained then it is generally the MLE that attains it.
Proof θ must satisfy ∂`∂θ = Iθ(θ − θ).
Setting ∂`∂θ = 0 and solving will give the MLE θ.
Since Iθ > 0 (in all but exceptional circumstances), this gives θ = θ.
Question Do all MLEs attain the CRLB?No, because not all MLEs are unbiased.
Jonathan Marchini (University of Oxford) BS2a MT 2013 61 / 282
Example 11
Let X1, . . . ,Xn be a random sample from N(µ, σ2).
Then we know the MLEs are µ = X , σ2 = 1n∑n
i=1 X 2i − X 2.
Exercise µ is unbiased, but σ2 is biased. CRLBs are 1/Iµ = σ2 and1/Iσ2 = 2σ4/n.
Var(µ) = σ2/n which equals the CRLB so is MVUE.
Var(σ2) = 2(n − 1)σ4/n2 is less than the CRLB. But σ2 is biased.
The sample variance S2 = 1n−1
∑ni=1(Xi − X )2 is unbiased and has
variance 2σ4/(n − 1) which is larger than the CRLB.Question Is S2 a MVUE?
Jonathan Marchini (University of Oxford) BS2a MT 2013 62 / 282
Efficiency
Definition 13 The (Bahadur) efficiency of an estimator θ is defined asa comparison of the variance of θ with the CR bound I−1
θ . That is
Efficiency of θ =I−1θ
Var[θ]=
1
IθVar[θ]
The asymptotic efficiency is the limit as n→∞.
There are similar definitions for the relative efficiency of two estimators.
Jonathan Marchini (University of Oxford) BS2a MT 2013 63 / 282
Asymptotic normality of MLE
Revision from Part A Statistics As the sample size n→∞, the MLE
θ ≈ N(θ, I−1θ ).
This is a powerful and general result. Assuming the usual regularityconditions hold then it tells us that the MLE has the followingproperties
1 it is asymptotically unbiased2 it is asymptotically efficient i.e. it attains the CRLB asymptotically.3 it has a normal distribution asymptotically.
Jonathan Marchini (University of Oxford) BS2a MT 2013 64 / 282
Extensions to the Cramér-Rao inequality1. If θ is an estimator with bias b(θ) = bias(θ), then
Var[θ] ≥(
1 +∂b∂θ
)2
I−1θ
2. If g(x) is an unbiased estimator for g(θ), then
Var[g(X )] ≥(∂g∂θ
)2
I−1θ .
Proof Begin with Eθ(θ(X )) = θ + b(θ) (in 1.) and Eθ(g(X )) = g(θ) (in2.). Differentiate both sides and proceed as above to findCov[U,V ] = (1 + ∂b/∂θ) (in 1.) and Cov[U,V ] = ∂g/∂θ (in 2., withU = g). The bound is against Cov[U,V ]2 which leads to the resultsabove.
Jonathan Marchini (University of Oxford) BS2a MT 2013 65 / 282
Fisher Information for a d-dimensional parameterInformation matrix:
Iij = E[∂`
∂θi
∂`
∂θj
]= −E
[∂2l
∂θi∂θj
]under regularity conditions. The CR inequality is
Var(θi) ≥ [I−1]ii , i = 1, . . . ,d .
Exercise: verify that we have already proved Var(θi) ≥ [Iii ]−1. Notethat [I−1]ii ≥ [Iii ]−1 (GJJ) so bound above is stronger.
Exercise For an Exponential family in canonical form,
Iij = − ∂2
∂φi∂φjnD(φ).
Jonathan Marchini (University of Oxford) BS2a MT 2013 66 / 282
The CRLB may not be achievable but will still wish to search for anMVUE. Sufficiency plays an important role in the search for a MVUE.
Theorem 3 : Rao-Blackwell Theorem (RBT) (GJJ 2.5.2)Let X1, . . . ,Xn be a random sample of observations from f (x ; θ).Suppose that T is a sufficient statistic for θ and that θ is any unbiasedestimator for θ.
Define a new estimator θT = E[θ | T ]. Then
1. θT is a function of T alone;
2. E[θT ] = θ;
3. Var(θT ) ≤ Var(θ).
Comment This says that estimators maybe be improved if we takeadvantage of sufficient statistics.
Jonathan Marchini (University of Oxford) BS2a MT 2013 67 / 282
Proof
1.
θT = EX [θ | T = t ] =
∫χθ(x)f (x | t , θ)dx
=
∫χθ(x)f (x | t)dx
2. E[θT ] = ET [E[θ | T ]] = E[θ] = θ (by law of total expectation)
3. Using the law of total variance
Var(θ) = Var(E[θ | T ]) + ET [Var(θ | T )]
= Var(θT ) + ET [Var(θ | T )]
⇒ Var(θ) ≥ Var(θT )
Jonathan Marchini (University of Oxford) BS2a MT 2013 68 / 282
Example 12Suppose X1, . . . ,Xn be a random sample from Bernoulli(θ).
It is easy to see that θ = X1 is unbiased for θ. Also, we have seenbefore that T =
∑Ni=1 Xi is sufficient for θ.
We can use RBT to construct an estimator with smaller variance
E[X1 | T = t ] = P(X1 = 1 | T = t) =P(X1 = 1,
∑Ni=1 Xi = t)
P(∑N
i=1 Xi = t)
=P(X1 = 1,
∑Ni=2 Xi = t − 1)
NCtθt (1− θ)N−t
=θ.N−1Ct−1θ
t−1(1− θ)N−t
NCtθt (1− θ)n−t
=tN
Jonathan Marchini (University of Oxford) BS2a MT 2013 69 / 282
Corollary 4 If an MVUE θ for θ exists, then there is a function θT of theminimal sufficient statistic T for θ which is an MVUE.
Proof If θ is a MVUE and T is minimal sufficient then by RBT we canconstruct θT . Which implies θT is a function of T alone, is unbiasedand variance no larger than θ. Hence is also a MVUE.
Comment This says that we can restrict our search for a MVUE tothose based on minimal sufficient statistics.
Jonathan Marchini (University of Oxford) BS2a MT 2013 70 / 282
Completeness
Definition 14 : Complete Sufficient StatisticsLet T (X1, . . . ,Xn) be a sufficient statistic for θ. The statistic T iscomplete if, whenever h(T ) is a function of T for which E[h(T )] = 0 forall θ, then h(T ) ≡ 0 almost everywhere.
Lemma 4 Suppose T is a complete sufficient statistic for θ, and g(T )unbiased for θ, so E[g(T )] = θ. Then g(T ) is the unique function of Twhich is an unbiased estimator of θ.
Proof If there were two such unbiased estimators g1(T ),g2(T ), thenE[g1(T )− g2(T )] = θ − θ = 0 for all θ, so g1(T ) = g2(T ) almosteverywhere.
Jonathan Marchini (University of Oxford) BS2a MT 2013 71 / 282
Question If we have an unbiased estimator what are the sufficientconditions for it to be MVUE?
Lemma 5 If an MVUE for θ exists and T is a complete and minimalsufficient statistic for θ, and suppose h = h(T ) is unbiased for θ, thenh(T ) is a MVUE.
This Lemma combines the results of Corollary 4 and Lemma 4.
Proof If an MVUE exists then there is a function of T which is anMVUE, by the RB Corollary 4. But h(T ) is the only function of T whichis unbiased for θ (from Lemma 4). So h must be the function of Twhich an MVUE.
Jonathan Marchini (University of Oxford) BS2a MT 2013 72 / 282

Question Finally, how can we construct a MVUE?
Theorem 4 : Lehmann-Scheffé theorem Let T be a completesufficient statistic for θ, and let θ be an unbiased estimator for θ, thenthe unbiased estimator θT = E[θ | T ] has the smallest variance amongall unbiased estimators of θ. That is,
Var(θT ) ≤ Var(θ)
for all unbiased estimators θ.
Comment This theorem says that if we can find any unbiasedestimator and a complete sufficient statistic T then we can construct aMVUE.
Jonathan Marchini (University of Oxford) BS2a MT 2013 73 / 282
Proof
Suppose θ exists with Var(θ) < Var(θT ).
Then by RBT we can construct θT = E[θ | T ] such that
Var(θT ) ≤ Var(θ) < Var(θT )
But θT and θT are both unbiased and T is complete, so by Lemma 4we have θT = θT and
Var(θT ) = Var(θT )
which is a contradiction.
Jonathan Marchini (University of Oxford) BS2a MT 2013 74 / 282
Lemma 6 : Complete Sufficiency in EFsIf the rv X has a distribution belonging to a k -parameter exponentialfamily, then under the usual regularity conditions, the statistic
( n∑i=1
B1(Xi),n∑
i=1
B2(Xi), . . . ,n∑
i=1
Bk (Xi))
which we already know is minimal sufficient, is complete.
Comment We showed before that MLEs for exponential families werefunctions of this same statistic.
Therefore, for a member of an exponential family if the MLE isunbiased (note : not all MLEs are unbiased), then by Lemma 5, theMLE will be MVUE. If there is an unbiased estimator that attains theCRLB then, by Corollary 3, the MLE will attain the CRLB.
Jonathan Marchini (University of Oxford) BS2a MT 2013 75 / 282
Example 13Let X1, . . . ,Xn be a random sample from N(µ, σ2).
Then we know the MLEs are µ = X , σ2 = 1n∑n
i=1 X 2i − X 2.
µ is unbiased, but σ2 is biased.
Exercise The minimal sufficient complete statistic is(∑ni=1 Xi ,
∑ni=1 X 2
i
).
So µ is MVUE and attains the CRLB with variance σ2/n.
The sample variance S2 = 1n−1
∑ni=1(Xi − X )2 is unbiased and is a
function of the minimal sufficient complete statistic so is MVUE withvariance 2σ4/(n − 1) which is larger than the CRLB of 2σ4/n.
Jonathan Marchini (University of Oxford) BS2a MT 2013 76 / 282

Lecture 5 - Method of Moments
Jonathan Marchini (University of Oxford) BS2a MT 2013 77 / 282
Method of momentsGenerate estimators by equating observed statistics with theirexpected values
E{t(X1, . . . ,Xn)} = t(x1, . . . , xn).
Comment Simple, easy to use. Often have good properties, but notguaranteed. Can provide good starting point for an iterative method forfinding MLEs.
Example 14 Uniform iid sample X = (X1,X2, ...,Xn) on (0, θ).
L(θ; x) = f (x ; θ) = θ−n, 0 < x1, . . . , xn < θ.
Let X(n) = maxi Xi . In this case the moment relation
E[X(n)
]= x(n)
leads to an unbiased sufficient statistic, θ = n+1n X(n).
Jonathan Marchini (University of Oxford) BS2a MT 2013 78 / 282
Method of moments
The distribution of X(n) = maxi Xi is obtained from the CDF
P(X(n) ≤ y) =(yθ
)n
(the probability all iid Xi fall in (0, y)) so
fX(n)(y ; θ) =
nyn−1
θn , 0 < y < θ
andE[X(n)
]=
nn + 1
θ, so θ =n + 1
nX(n)
is unbiased.
Jonathan Marchini (University of Oxford) BS2a MT 2013 79 / 282
Now check θ is sufficient.
The distribution of X | X(n) = y is
f (x |X(n) = y ; θ) =f (x ; θ)
fX(n)(y ; θ)
=1
nyn−1
which does not depend on θ.
θ is minimal sufficient since
L(θ; x)
L(θ; y)=θ−nI[x(n) < θ]
θ−nI[y(n) < θ]
does not depend on θ if x(n) = y(n) i.e. θ forms a Lehmann-Scheffépartition.
Jonathan Marchini (University of Oxford) BS2a MT 2013 80 / 282

Finally, we can show that θ = θ(X(n)) is complete.
If E[θ] = 0 for all θ > 0 then∫ θ
0h(θ(y))
nyn−1
θn dy = 0
for all θ > 0 and hence ∫ θ
0h(θ(y))yn−1dy = 0.
Differentiate wrt θ (using the Leibniz integral rule), and concludeh(θ) = 0 identically for all X . It follows that θ is the unique unbiasedestimator based on X(n).
Since θ is minimal sufficient, if a MVUE exists, it equals θ (Corollary 4).
We can’t use the CRB to show a MVUE exists, as the problem isnon-regular.
Jonathan Marchini (University of Oxford) BS2a MT 2013 81 / 282
Exercise `(θ; x) = −n log(θ) so
E
[(∂`
∂θ
)2]
= n2/θ2
and the CRB would be Var(θ) ≥ θ2/n2.
However, you can check (using fX(n)(y ; θ) above) that
Var(θ) =θ2
n(n + 1)
which is smaller than θ2/n2 for any n ≥ 1.
This is not a contradiction, as f (x ; θ) doesn’t satisfy the regularityconditions (limits of x depend on θ).
Jonathan Marchini (University of Oxford) BS2a MT 2013 82 / 282
We can find the MLE in this example
θ = X(n)
but this estimator is1 biased and the Uniform density does not satisfy the regularity
condition needed for CRLB so it does not apply.2 does not satisfy ∂`/∂θ = 0, so even if the CRLB did apply we
cannot make the link between the MLE and the lower bound.
Jonathan Marchini (University of Oxford) BS2a MT 2013 83 / 282
Example 15A sample from N(µ, σ2). The moment relations
E
[n∑
i=1
Xi
]= nµ, E
[n∑
i=1
X 2i
]= n(µ2 + σ2)
lead to the estimating equations
µ = X , µ2 + σ2 = n−1n∑
i=1
X 2i .
We have seen that these are just the equations for the MLE’s in this2-dimensional exponential linear family, and solve to give the MLE
σ2 = n−1n∑
i=1
(Xi − X )2.
Jonathan Marchini (University of Oxford) BS2a MT 2013 84 / 282

Example 16A sample from Pois(λ). We have two possible moment relations
E
[1n
n∑i=1
Xi
]= λ, ⇒ λ1 =
1n
n∑i=1
Xi
E
[1n
n∑i=1
(Xi − X )2
]= λ, ⇒ λ2 =
1n
n∑i=1
(Xi − X )2
For a sample of size n we haveA(λ) = logλ, B(x) =
∑ni=1 xi , C(x) = − log(
∏ni=1 xi !), D(λ) = −nλ
By Lemma 6 we have that B(x) =∑n
i=1 xi is a sufficient completestatistic. Thus by the Lehmann-Scheffé Theorem we have thatarithmetic mean λ1 is MVUE. λ2 is not a function of B(x).
Exercise Show that λ1 attains the CRLB.Jonathan Marchini (University of Oxford) BS2a MT 2013 85 / 282
Method of moments asymptoticsDistribution of θ as n→∞.Suppose the dimension of θ is d = 1 andH = n−1∑n
i=1 h(xi) where E(H) = k(θ) and θ is the solution toH = k(θ).
Theorem 5 As n→∞, θ is asymptotically normally distributed withmean θ and variance n−1σ2
h/(k ′(θ))2, where
σ2h =
∫h(x)2f (x ; θ)dx − k(θ)2
Proof E(H) = k(θ), so by the Central Limit Theorem,
(H − k(θ))√
nσh
D→ N(0,1)
ApproximatelyH = k(θ) = k(θ) + (θ − θ)k ′(θ)
Jonathan Marchini (University of Oxford) BS2a MT 2013 86 / 282
Method of moments asymptotics
Rearrange to get√
n(θ − θ)k ′(θ)
σh=
(H − k(θ))√
nσh
D→ N(0,1)
so
θ ≈ N
(θ,
σ2h
n(k ′(θ))2
)as n→∞.
Jonathan Marchini (University of Oxford) BS2a MT 2013 87 / 282
Example 17 - Exponential distribution
f (x ; θ) = θ exp(−θx), x > 0
E[X ] = θ−1, θ = X−1
That isk(θ) = θ−1, H = X , h(X ) = X , E
[h(X )
]= θ−1
Var[h(X )
]= σ2
h = θ−2, k ′(θ) = −θ−2
Now
θ ≈ N
(θ,
σ2h
n(k ′(θ))2
)so
θ ≈ N(θ,n−1θ2)
Jonathan Marchini (University of Oxford) BS2a MT 2013 88 / 282

Exponential families - Method of moments and MLEsMLE are moment estimates because we are solving
E[ n∑
i=1
t(Xi)]
=n∑
i=1
t(xi)
for θ. We showed earlier that
E[t(X )
]= −D′(θ)
so
E[ n∑
i=1
t(Xi)]
= −nD′(θ)
Nowk(θ) = −D′(θ), k ′(θ) = −D′′(θ).
Var(θ) ≈Var(t(X ))
nD′′(θ)2 =−D′′(θ)
nD′′(θ)2 = I−1θ
Jonathan Marchini (University of Oxford) BS2a MT 2013 89 / 282
Lecture 6 : Bayesian Inference
Jonathan Marchini (University of Oxford) BS2a MT 2013 90 / 282
Ideas of probability
The majority of statistics you have learned so are are called classicalor Frequentist. The probability for an event is defined as the proportionof successes in an infinite number of repeatable trials.
By contrast, in Subjective Bayesian inference, probability is a measureof the strength of belief.
We treat parameters as random variables. Before collecting any datawe there is uncertainty about the value of a parameter. Thisuncertainty can be formalised by specifying a pdf (or pmf) for theparameter. We then conduct an experiment to collect some data thatwill give us information about the parameter. We then use BayesTheorem to combine our prior beliefs with the data to derive anupdated estimate of our uncertainty about the parameter.
Jonathan Marchini (University of Oxford) BS2a MT 2013 91 / 282
The history of Bayesian Statistics
Bayesian methods originated with Bayes and Laplace (late 1700sto mid 1800s).In the early 1920’s, Fisher put forward an opposing viewpoint, thatstatistical inference must be based entirely on probabilities withdirect experimental interpretation i.e. the repeated samplingprinciple.In 1939 Jeffrey’s book ’The theory of probability’ started aresurgence of interest in Bayesian inference.This continued throughout the 1950-60s, especially as problemswith the Frequentist approach started to emerge.The development of simulation based inference has transformedBayesian statistics in the last 20-30 years and it now plays aprominent part in modern statistics.
Jonathan Marchini (University of Oxford) BS2a MT 2013 92 / 282

Problems with Frequentist Inference - IFrequentist Inference generally does not condition on theobserved data
A confidence interval is a set-valued function C(X ) ⊆ Θ of the data Xwhich covers the parameter θ ∈ C(X ) a fraction 1− α of repeateddraws of X taken under the null H0.
This is not the same as the statement that, given data X = x , theinterval C(x) covers θ with probability 1− α. But this is the type ofstatement we might wish to make.
Example 1 Suppose X1,X2 ∼ U(θ− 1/2, θ + 1/2) so that X(1) and X(2)
are the order statistics. Then C(X ) = [X(1),X(2)] is a α = 1/2 level CIfor θ. Suppose in your data X = x , x(2) − x(1) > 1/2 (this happens inan eighth of data sets). Then θ ∈ [x(1), x(2)] with probability one.
Jonathan Marchini (University of Oxford) BS2a MT 2013 93 / 282
Problems with Frequentist Inference - II
Frequentist Inference depends on data that were never observed
The likelihood principle Suppose that two experiments relating to θ,E1,E2, give rise to data y1, y2, such that the corresponding likelihoodsare proportional, that is, for all θ
L(θ; y1,E1) = cL(θ; y2,E2).
then the two experiments lead to identical conclusions about θ.
Key point MLE’s respect the likelihood principle i.e. the MLEs for θ areidentical in both experiments. But significance tests do not respect thelikelihood principle.
Jonathan Marchini (University of Oxford) BS2a MT 2013 94 / 282
Consider a pure test for significance where we specify just H0. Wemust choose a test statistic T (x), and define the p-value for dataT (x) = t as
p-value = P(T (X ) at least as extreme as t |H0).
The choice of T (X ) amounts to a statement about the direction oflikely departures from the null, which requires some consideration ofalternative models.
Note 1 The calculation of the p-value involves a sum (or integral) overdata that was not observed, and this can depend upon the form of theexperiment.
Note 2 A p-value is not P(H0|T (X ) = t).
Jonathan Marchini (University of Oxford) BS2a MT 2013 95 / 282
Example
A Bernoulli trial succeeds with probability p.
E1 fix n1 Bernoulli trials, count number y1 of successes
E2 count number n2 Bernoulli trials to get fixed number y2 successes
L(p; y1,E1) =
(n1
y1
)py1(1− p)n1−y1 binomial
L(p; y2,E2) =
(n2 − 1y2 − 1
)py2(1− p)n2−y2 negative binomial
If n1 = n2 = n, y1 = y2 = y then L(p; y1,E1) ∝ L(p; y2,E2).So MLEs for p will be the same under E1 and E2.
Jonathan Marchini (University of Oxford) BS2a MT 2013 96 / 282

ExampleBut significance tests contradict : eg, H0 : p = 1/2 againstH1 : p < 1/2 and suppose n = 12 and y = 3.
The p-value based on E1 is
P(
Y ≤ y |θ =12
)=
y∑k=0
(nk
)(1/2)k (1− 1/2)n−k (= 0.073)
while the p-value based on E2 is
P(
N ≥ n|θ =12
)=∞∑
k=n
(k − 1y − 1
)(1/2)k (1− 1/2)n−k (= 0.033)
so different conclusions at significance level 0.05.
Note The p-values disagree because they sum over portions of twodifferent sample spaces.
Jonathan Marchini (University of Oxford) BS2a MT 2013 97 / 282
Bayesian Inference - Revison
Likelihood f (x | θ) and prior distribution π(θ) for ϑ. The posteriordistribution of ϑ at ϑ = θ, given x , is
π(θ | x) =f (x | θ)π(θ)∫f (x | θ)π(θ)dθ
⇒ π(θ | x) ∝ f (x | θ)π(θ)
posterior ∝ likelihood× prior
The same form for θ continuous (π(θ | x) a pdf) or discrete (π(θ | x) apmf). We call
∫f (x | θ)π(θ)dθ the marginal likelihood.
Likelihood principle Notice that, if we base all inference on theposterior distribution, then we respect the likelihood principle. If twolikelihood functions are proportional, then any constant cancels top andbottom in Bayes rule, and the two posterior distributions are the same.
Jonathan Marchini (University of Oxford) BS2a MT 2013 98 / 282
Example 1X ∼ Bin(n, ϑ) for known n and unknown ϑ. Suppose our priorknowledge about ϑ is represented by a Beta distribution on (0,1), andθ is a trial value for ϑ.
π(θ) =θa−1(1− θ)b−1
B(a,b), 0 < θ < 1.
0.0 0.2 0.4 0.6 0.8 1.0
01
23
45
x
dens
ity
a=1, b=1a=20, b=20a=1, b=3a=8, b=2
Jonathan Marchini (University of Oxford) BS2a MT 2013 99 / 282
Example 1Prior probability density
π(θ) =θa−1(1− θ)b−1
B(a,b), 0 < θ < 1.
Likelihood
f (x | θ) =
(nx
)θx (1− θ)n−x , x = 0, . . . ,n
Posterior probability density
π(θ | x) ∝ likelihood× prior∝ θa−1(1− θ)b−1θx (1− θ)n−x
= θa+x−1(1− θ)n−x+b−1
Here posterior has the same form as the prior (conjugacy) withupdated parameters a,b replaced by a + x ,b + n − x , so
π(θ | x) =θa+x−1(1− θ)n−x+b−1
B(a + x ,b + n − x)Jonathan Marchini (University of Oxford) BS2a MT 2013 100 / 282
Example 1
For a Beta distribution with parameters a,b
µ =a
a + b, σ2 =
ab(a + b)2(a + b + 1)
The posterior mean and variance are
a + Xa + b + n
,(a + X )(b + n − X )
(a + b + n)2(a + b + n + 1)
Suppose X = n and we set a = b = 1 for our prior. Then posteriormean is
n + 1n + 2
i.e. when we observe events of just one type then our point estimate isnot 0 or 1 (which is sensible especially in small sample sizes).
Jonathan Marchini (University of Oxford) BS2a MT 2013 101 / 282
Example 1
For large n, the posterior mean and variance are approximately
Xn,
X (n − X )
n3
In classical statistics
θ =Xn,θ(1− θ)
n=
X (n − X )
n3
Jonathan Marchini (University of Oxford) BS2a MT 2013 102 / 282
Example 1Suppose ϑ = 0.3 but prior mean is 0.7 with std 0.1. Suppose dataX ∼ Bin(n, ϑ) with n = 10 (yielding X = 3) and then n = 100 (yieldingX = 30, say).
0.0 0.2 0.4 0.6 0.8 1.0
02
46
810
theta
prob
abilit
y de
nsity
priorpost n=10
post n=100
As n increases, the likelihood overwhelms information in prior.Jonathan Marchini (University of Oxford) BS2a MT 2013 103 / 282
Example 2 - Conjugate priorsNormal distribution when the mean and variance are unknown.Letτ = 1/σ2, θ = (τ, µ). τ is called the precision. The prior τ has aGamma distribution with parameters α, β > 0, and conditional on τ , µhas a distribution N(ν, 1
kτ ) for some k > 0, ν ∈ R.The prior is
π(τ, µ) =βα
Γ(α)τα−1e−βτ · (2π)−1/2(kτ)1/2 exp
{−kτ
2(µ− ν)2
}or
π(τ, µ) ∝ τα−1/2 exp[−τ{β +
k2
(µ− ν)2}]
The likelihood is
f (x | µ, τ) = (2π)−n/2τn/2 exp
{−τ
2
n∑i=1
(xi − µ)2
}
Jonathan Marchini (University of Oxford) BS2a MT 2013 104 / 282

Example 2 - Conjugate priors
Thus
π(τ, µ | x) ∝ τα+(n/2)−1/2 exp
[−τ
{β +
k2
(µ− ν)2 +12
n∑i=1
(xi − µ)2
}]
Complete the square to see that
k(µ− ν)2 +∑
(xi − µ)2
= (k + n)
(µ− kν + nx
k + n
)2
+nk
n + k(x − ν)2 +
∑(xi − x)2
Jonathan Marchini (University of Oxford) BS2a MT 2013 105 / 282
Example 2 - Conjugate priors
Thus the posterior is
π(τ, µ | x) ∝ τα′−1/2 exp[−τ{β′ +
k ′
2(ν ′ − µ)2
}]where
α′ = α +n2
β′ = β +12· nk
n + k(x − ν)2 +
12
∑(xi − x)2
k ′ = k + n
ν ′ =kν + nx
k + n
This is the same form as the prior, so the class is conjugate prior.
Jonathan Marchini (University of Oxford) BS2a MT 2013 106 / 282
Lecture 7 : Prior distributions. Hierarchical models. PredictiveDistributions.
Jonathan Marchini (University of Oxford) BS2a MT 2013 107 / 282
Constructing priors
Subjective Priors: Write down a distribution representing priorknowledge about the parameter before the data is available. Ifpossible, build a model for the parameter. If different scientists havedifferent priors or it is unclear how to represent prior knowledge as adistribution, then consider several different priors. Repeat the analysisand check that conclusions are insensitive to priors representing’different points of view’.Non-Subjective Priors: Several approaches offer the promise of an’automatic’ and even ’objective’ prior. We list some suggestions below(Uniform, Jeffreys, MaxEnt). In practice, if one of these priorsconflicted prior knowledge, we wouldnt use it. These approaches canbe useful to complete the specification of a prior distribution, oncesubjective considerations have been taken into account.
Jonathan Marchini (University of Oxford) BS2a MT 2013 108 / 282

Uniform priorsIf we use a uniform prior (π(θ) ∝ constant) then
π(θ|x) = L(θ; x)/
∫Θ
L(θ; x)dθ
and∫
Θ L(θ; x)dθ may not be finite. Such distributions are calledimproper and all inference is meaningless.
Example X ∼ Exp(1/µ) and N = I(X < 1) yielding N = n withn ∈ {0,1}. Suppose we observe n = 0. Now
L(µ; n) = exp(−1/µ)
so if we take π(µ) ∝ 1 for µ > 0 we have
π(µ|n) ∝ exp(−1/µ)
which is improper, as π(µ|n)→ 1 as µ→∞ so∫∞
0 exp(−1/µ)dµcannot exist.
Jonathan Marchini (University of Oxford) BS2a MT 2013 109 / 282
Jeffreys’ PriorsJeffreys reasoned as follows. If we have a rule for constructing priors itshould lead to the same distribution if we apply it to θ or some otherparameterization ψ with g(ψ) = θ.Jeffreys took
π(θ) ∝√
Iθ where Iθ = E
[(∂`
∂θ
)2]
is the Fisher information. Now if g(ψ) = θ then
πΨ(ψ) ∝ π(g(ψ))|g′(ψ)|,
so Jeffreys rule should yield πΨ(ψ) ∝√
Ig(ψ)|g′(ψ)|. The rule givesπΨ(ψ) ∝
√Iψ. But Iψ = g′(ψ)2Ig(ψ), so√
Iψ =√
Ig(ψ)|g′(ψ)|
and the rule is consistent in this respect.It is sometimes desirable (on subjective grounds) to have a prior whichis invariant under reparameterization.
Jonathan Marchini (University of Oxford) BS2a MT 2013 110 / 282
Higher dimensions
If Θ ⊂ Rk , and `(θ; X ) = log(f (X ; θ)), the Fisher information
[Iθ]i,j = −Eθ(∂2`(θ; X )
∂θi∂θj
)satisfies
−Eθ(∂2`(θ; X )
∂θi∂θj
)= Eθ
(∂`(θ; X )
∂θi
∂`(θ; X )
∂θj
)subject to regularity conditions. A k -dimensional Jeffreys’ prior
π(θ) ∝ |Iθ|1/2
(|A| ≡ det(A)) is invariant under 1-1 reparameterization.Exercise Verify 1 to 1 g(ψ) = θ in Rk gives πΨ(ψ) =
√Ig(ψ)
∣∣∣∂θT
∂ψ
∣∣∣.Jonathan Marchini (University of Oxford) BS2a MT 2013 111 / 282
Maximum Entropy PriorsChoose a density π(θ) which maximizes the entropy
φ[π] = −∫
Θπ(θ) logπ(θ)dθ
over functions π(θ) subject to constraints on π. This is a Calculus ofVariations problem.Example The distribution π maximizing φ[π] over all densities π onΘ = R, subject to∫ ∞
0π(θ)dθ = 1,
∫ ∞0
θπ(θ)dθ = µ, and∫ ∞
0(θ − µ)2π(θ)dθ = σ2,
(normalized with Eϑ = µ and Var(ϑ) = σ2) is the normal density
π(θ) =1√
2πσ2e−(θ−µ)2/2σ2
.
Jonathan Marchini (University of Oxford) BS2a MT 2013 112 / 282

This is a special case of the following Theorem.
Theorem The density π(θ) that maximizes φ(π), subject to
E[tj(θ)] = tj , j = 1, . . . ,p
takes the p-parameter exponential family form
π(θ) ∝ exp
{ p∑i=1
λi ti(θ)
}
for all θ ∈ Θ, where λ1, . . . , λp are determined by the constraints. (Forthe proof see Leonard and Hsu). Example In the normal caset1(θ) = θ, t1 = µ, t2(θ) = (θ − µ)2, t2 = σ2 givesπ(θ) ∝ exp(λ1θ + λ2(θ − µ)2). Impose the constraints to get λ1 = 0and λ2 = −1/2σ2.
Jonathan Marchini (University of Oxford) BS2a MT 2013 113 / 282
ExampleSuppose prior probabilities are specified so that
P(aj−1 < ϑ ≤ aj) = φj , j = 1, . . . ,p
with∑
j φj = 1 and
ϑ ∈ (a0,ap), a0 ≤ a1 · · · ≤ ap ≤ ap.
We find the maximum entropy distribution subject to these conditions.The conditions are equivalent to
E[tj(ϑ)] = φj , j = 1, . . . ,p
where tj(ϑ) = I[aj−1 < ϑ ≤ aj ]. The posterior density of ϑ is
π(θ) ∝ exp
p∑
j=1
λjI[aj−1 < θ ≤ aj ]
, a0 ≤ θ ≤ ap
where λ1, . . . , λp are determined by the conditions. π(θ) is a histogram,with intervals (a0,a1], (a1,a2], . . . , (ap−1,ap].
Jonathan Marchini (University of Oxford) BS2a MT 2013 114 / 282
Hierarchical modelsThese are models where the prior has parameters which again have aprobability distribution.
Data x have a density f (x ; θ).The prior distribution of θ is π(θ;ψ).ψ has a prior distribution g(ψ), for ψ ∈ Ψ.
We can work with posterior π(θ, ψ|x) ∝ f (x ; θ)π(θ;ψ)g(ψ), or
π(θ|x) =
∫Ψπ(θ, ψ|x)dψ ∝ f (x ; θ)
∫Ψπ(θ;ψ)g(ψ)dψ
∝ f (x ; θ)π(θ)
The hierarchical model simply specifies the prior for θ indirectly
π(θ) =
∫π(θ;ψ)g(ψ)dψ.
Jonathan Marchini (University of Oxford) BS2a MT 2013 115 / 282
ExampleFor i = 1,2, ..., k we make ni observations Xi,1,Xi,2, ...,Xi,ni onpopulation i , with Xij ∼ N(θi , σ
2). The θi are the unknown means forobservations on the i ’th population but σ2 is known. Suppose the priormodel for the θi is iid normal, θi ∼ N(φ, τ2).
X1,1,…,X1,n1 ~ N θ1,σ
2( ) θ1
X2,1,…,X2,n2~ N θ2,σ
2( ) θ2
. . N φ,τ 2( ) . .
Xk,1,…,Xk,nk~ N θk,σ
2( ) θk!
Jonathan Marchini (University of Oxford) BS2a MT 2013 116 / 282

Example
If ψ = (φ, τ2)
π(θ1, . . . , θk ;ψ) =k∏
i=1
(2πτ2)−1/2 exp{− 1
2τ2 (θi − φ)2},
Now we need a prior for φ and τ2. Suppose we take
g(φ, τ2) = constant,
so all possible φ, τ2 equally likely a priori. careful!.
The joint posterior of the parameters is
π(θ, ψ|x) ∝ f (x ; θ)π(θ|ψ)g(ψ)
Jonathan Marchini (University of Oxford) BS2a MT 2013 117 / 282
ExampleIntegration with respect to ψ gives the posterior density of θ.
π(θ, φ, τ2|x) ∝
k∏i=1
exp
− 12σ2
ni∑j=1
(xij − θi)2
×
[k∏
i=1
τ−1 exp{− 1
2τ2 (θi − φ)2}]
Integrate out wrt φ and τ2 to obtain the marginal posterior distributionof θ. Exercise Integrating the last factor wrt φ gives a termproportional to
τ1−k exp{− 1
2τ2
∑(θi − θ)2
}Exercise Then the integral wrt τ gives a term proportional to[∑
(θi − θ)2]1−k/2
Jonathan Marchini (University of Oxford) BS2a MT 2013 118 / 282
ExampleThus the posterior distribution of θ is
π(θ|x) ∝
k∏i=1
exp
− 12σ2
ni∑j=1
(xij − θi)2
· [∑(θi − θ)2
]1−k/2
∝
[k∏
i=1
exp{− 1
2σ2 ni(θi − xi)2}]·[∑
(θi − θ)2]1−k/2
where xi =∑
j xij/ni . Let θj be the MAP estimate for θj (posteriormode) and put θ∗ =
∑θj/k . Exercise Differentiate π(θ|x) wrt θj and
set to equal zero to get
θj = (ωj xj + νθ∗)/(ωj + ν),
where ωj = (σ2/nj)−1 and ν =
[∑(θi − θ∗)2/(k − 2)
]−1.
If the θj were unrelated then θj = xj . The model modifies the estimateby pulling it towards the mean of the estimated θis.
Jonathan Marchini (University of Oxford) BS2a MT 2013 119 / 282
Uniform priors
If the prior is uniform (and possibly improper itself) but the posterior isproper, and it can be shown that all parameter values being equallyprobable a priori is a fair representation of prior knowledge, then theuniform prior may be useful.
In the hierarchical model in the previous example the prior on ϕ, τ2
was improper, but the posterior is proper.
Jonathan Marchini (University of Oxford) BS2a MT 2013 120 / 282

Priors for Exponential Families
Conjugate prior for an exponential family
f (x | θ) = exp
k∑
j=1
Aj(θ)n∑
i=1
Bj(xi) +n∑
i=1
C(xi) + nD(θ)
The prior distribution based on sufficient statistics
π(θ) ∝ exp{τ0D(θ) +k∑
j=1
Aj(θ)τj}
(where (τ0, . . . , τk ) are constant prior parameters) is conjugate.
Jonathan Marchini (University of Oxford) BS2a MT 2013 121 / 282
Priors for Exponential Families
The posterior density is proportional to
f (x | θ)π(θ | τ0, . . . , τk )
∝ exp
k∑
j=1
Aj(θ)
[n∑
i=1
Bj(xi) + τj
]+ (n + τ0)D(θ)
This is an updated form of the prior with
B′j (x) =n∑
i=1
Bj(xi) + τj
n′ = n + τ0
Jonathan Marchini (University of Oxford) BS2a MT 2013 122 / 282
f
Jonathan Marchini (University of Oxford) BS2a MT 2013 123 / 282
Predictive distributions
X1, . . . ,Xn are observations from f (x ; θ) and the predictive distributionof a further observation Xn+1 is required.
If x = (x1, . . . , xn) then the posterior predictive distribution is
g(xn+1 | x) =
∫f (xn+1; θ)π(θ | x)dθ
Predictive distributions are useful for ...prediction.
They are used also for model checking. Divide the data in two groups,Y = (X1, ...,Xa) and Z = (Xa+1, ...,Xn). If we fit using Y and check thatthe ‘reserved data’ Z overlap g(xn+1 | x) in distribution.
Jonathan Marchini (University of Oxford) BS2a MT 2013 123 / 282

Example
Data X1, . . . ,Xn are iid N(θ, σ2) with σ2 known and prior θ ∼ N(µ0, σ20).
Predict Xn+1.
We saw that π(θ | x) = N(θ;µ1, σ21) with µ1 and σ1 calculated in
example 3 above.
In order to calculate the posterior predictive density for Xn+1 we needto evaluate
g(xn+1 | x) =
∫ ∞−∞
1√2πσ2
e−(x−θ)2
2σ21√
2πσ21
e− (θ−µ1)2
2σ21 dθ
We could complete the square to solve this.
Jonathan Marchini (University of Oxford) BS2a MT 2013 124 / 282
Example
Alternatively, think how Xn+1 is built up.
We have θ|X ∼ N(µ1, σ21) and Xn+1|θ ∼ N(θ, σ2).
If Y ,Z ∼ N(0,1) then
θ = µ1 + σ1Z (posterior)Xn+1 = θ + σY (observation model)
= µ1 + σ1Z + σY .
It follows that Xn+1 ∼ N(µ1, σ2 + σ2
1) is the posterior predictive densityfor Xn+1|X1, ...,Xn.
Jonathan Marchini (University of Oxford) BS2a MT 2013 125 / 282
Lecture 8 : Bayesian Hypothesis Testing
Jonathan Marchini (University of Oxford) BS2a MT 2013 126 / 282
Hypothesis Testing I
In Bayesian inference, hypotheses are represented by priordistributions. There is nothing special about H0, and H0 and H1 neednot be nested.Let π(θ|H0), θ ∈ Θ0 be the prior distribution of θ under hypothesis H0.Here π(θ|H0) is a pmf/pfd as θ|H0 is continuous/discrete.Composite H0 : θ ∈ Θ0, with Θ0 ⊂ Θ,
π(θ|H0) =π(θ)
π(θ ∈ Θ0)I(θ ∈ Θ0)
If Θ0 has more than one element then H0 is a composite hypothesis.Simple H0 : θ = θ0, so that π(θ0|H0) = 1. This is a simple hypothesis.However, since any statement about the form of the prior amounts to ahypothesis about θ, we are not restricted to statements about setmembership (not just simple and composite).
Jonathan Marchini (University of Oxford) BS2a MT 2013 127 / 282
Example 1In a quality inspection program components are selected at randomfrom a batch and tested. Let θ denote the failure probability. Supposethat we want to test for H0 : θ ≤ 0.2 against H1 : θ > 0.2 and that theprior is θ ∼ Beta(2,5) so that
π(θ) = 30θ(1− θ)4, 0 < θ < 1.
Now if π(H0) = π(θ ∈ Θ0) then π(H0) =∫ 0.2
0 30θ(1− θ)4dθ so thatπ(H0) ' 0.345 and π(H0) ' 1− 0.345 so
π(θ|H0) =30θ(1− θ)4
π(H0), 0 < θ ≤ 0.2
and
π(θ|H1) =30θ(1− θ)4
π(H1), 0.2 < θ < 1
Jonathan Marchini (University of Oxford) BS2a MT 2013 128 / 282
Marginal Likelihood
P(x |H0) is called the marginal likelihood (for hypothesis H0). We canthink of a parameter H ∈ {H0,H1}, with likelihood P(x |H), prior P(H)and posterior P(H|x).
By the partition theorem for probability (π(θ|H0) a pdf, say)
P(x |H0) =
∫Θ0
P(x |θ,H0)P(θ|H0)dθ
=
∫Θ0
L(θ; x)π(θ|H0)dθ,
since, given θ, x is determined by the observation model, andindependent of the process (H0) that generated θ.
Jonathan Marchini (University of Oxford) BS2a MT 2013 129 / 282
In the discrete case
P(x |H0) =∑θ∈Θ0
L(θ; x)π(θ|H0).
In the special case that H0 is a simple hypothesis Θ0 = {θ0},π(θ0|H0) = 1, and
P(x |H0) = L(θ0; x).
Jonathan Marchini (University of Oxford) BS2a MT 2013 130 / 282
Example 1 (cont)In the quality inspection program suppose n components are selectedfor independent testing. The number X that fail is X ∼ Binomial(n, θ).Recall H0 : θ ≤ 0.2 with θ ∼ Beta(2,5) in the prior.
The marginal likelihood for H0 is
P(x |H0) =
∫Θ0
L(θ; x)π(θ|H0)dθ
=
(5x
)∫ 0.2
0θx (1− θ)n−x 30θ(1− θ)4
π(H0)dθ
For one batch of size n = 5, X = 0 is observed. Recall thatπ(H0) ' 0.345. Then
P(x |H0) =
(50
)∫ 0.2
0
30θ(1− θ)9
π(H0)dθ
' 0.185/0.345 = 0.536.
Jonathan Marchini (University of Oxford) BS2a MT 2013 131 / 282
Similarly, for H1 : θ > 0.2
P(x |H1) =
(50
)∫ 1
0.2
30θ(1− θ)9
π(H1)dθ
' 0.134.
Jonathan Marchini (University of Oxford) BS2a MT 2013 132 / 282
Notice that1
P(x |H0) = E(L(ϑ; x)|H0),
that is, the marginal likelihood is the average likelihood given theprior π(θ|H0)
2 the marginal likelihood is the normalizing constant we often leaveoff when we write the posterior
π(θ|x ,H0) =L(θ; x)π(x |H0)
P(x |H0),
posterior =likelihood × prior
marginal likelihood,
Jonathan Marchini (University of Oxford) BS2a MT 2013 133 / 282
Prior and Posterior Probabilities for Hypotheses
We have a posterior probability for H0 itself. This is actually where westarted with Bayesian inference. In the simple case where we have twohypotheses H0, H1, exactly one of which is true,
P(H0 | x) =P(H0)P(x | H0)
P(x),
whereP(x) = P(H0)P(x | H0) + P(H1)P(x | H1)
so that P(H0 | x) + P(H1 | x) = 1.
When we estimate the value of a discrete parameter H ∈ {H0,H1}, weare making a Bayesian hypothesis test.
Jonathan Marchini (University of Oxford) BS2a MT 2013 134 / 282
Example 1 (cont)X ∼ Binomial(5, θ) with θ ∼ Beta(2,5) in the prior and H0 : θ ≤ 0.2 andH1 : θ > 0.2. The posterior probability for H0 given we observe X = 0 is
P(H0|x) =P(x |H0)P(H0)
P(x)
P(H0) =P(θ ∈ Θ0)
(P(θ ∈ Θ0) + P(θ ∈ Θ1))= π(H0)
P(x |H0)π(H0) ' 0.185P(x |H1)π(H1) ' 0.088
P(x) ' P(x |H0)P(H0) + P(x |H1)P(H1)
' 0.273P(H0|x) ' 0.185/0.273
= 0.678P(H1|x) ' 0.322
Jonathan Marchini (University of Oxford) BS2a MT 2013 135 / 282

Hypothesis Testing II, Bayes factors
Suppose we have two hypotheses H0, H1, exactly one of which is true.Data x .
The Prior OddsQ =
P[H0]
P[H1]
These are prior odds since P[H1] = 1− P[H0]. Here H0 is Q timesmore probable than H1, given the prior model.
The Posterior OddsQ∗ =
P[H0 | x ]
P[H1 | x ]
are the posterior odds, so that H0 is Q∗ times more probable than H1,given the data and prior model.
Jonathan Marchini (University of Oxford) BS2a MT 2013 136 / 282
Hypothesis Testing II, Bayes factorsThe posterior odds for H0 against H1 can be written
Q∗ =P[H0]
P[H1]× P(x | H0)
P(x | H1)= Q × B
where Q is the prior odds and
B =P(x | H0)
P(x | H1)
is the Bayes Factor.
The Bayes Factor is a criterion for model comparison since H0 is Btimes more probable than H1, given the data and a prior model whichputs equal probability on H0 and H1. The Bayes factor tells us how thedata shifts the strength of belief (measured as a probability) in H0relative to H1.
Jonathan Marchini (University of Oxford) BS2a MT 2013 137 / 282
Example 1 (cont)X ∼ Binomial(5, θ) with θ ∼ Beta(2,5) in the prior and H0 : θ ≤ 0.2 andH1 : θ > 0.2.
The prior odds are
Q = P(H0)/P(H1)
' 0.345/(1− 0.345) ' 0.527
The posterior odds are
Q∗ = P(H0|x)/P(H1|x)
' 0.678/(1− 0.678) ' 2.1
The Bayes factor comparing H0 and H1 is
B =P(x |H0)
P(x |H1)
' 0.536/0.134 = 4
Jonathan Marchini (University of Oxford) BS2a MT 2013 138 / 282
Explicitly, from the beginning,
B =
∫Θ0
L(x ; θ)π(θ|H0)dθ∫Θ1
L(x ; θ)π(θ|H1)dθ
=
∫Θ0
L(x ; θ)π(θ)dθ∫Θ1
L(x ; θ)π(θ)dθ× π(H1)
π(H0)
=
(50
) ∫ 0.20 30θ(1− θ)9dθ(5
0
) ∫ 10.2 30θ(1− θ)9dθ
∫ 10.2 30θ(1− θ)4dθ∫ 0.20 30θ(1− θ)4dθ
= 6619897/1654272 ' 4.002 (Maple).
This is ’positive’ evidence for θ ≤ 0.2. Notice that the Bayes factor is’more positive’ than the posterior odds, as the prior odds wereweighted against H0.
Jonathan Marchini (University of Oxford) BS2a MT 2013 139 / 282

Interpreting Bayes Factors
Adrian Raftery gives this table (values are approximate, and adaptedfrom a table due to Jeffreys) interpreting B.
‘P(H0|x)’ B 2 log(B) evidence for H0< 0.5 < 1 < 0 negative (supports H1)0.5 to 0.75 1 to 3 0 to 2 barely worth mentioning0.75 to 0.92 3 to 12 2 to 5 positive0.92 to 0.99 12 to 150 5 to 10 strong> 0.99 > 150 > 10 very strong
I added the leftmost column (posterior for prior odds equal one). Wesometimes report 2 log(B) because it is on the same scale as thefamiliar deviance and likelihood ratio test statistic.
Jonathan Marchini (University of Oxford) BS2a MT 2013 140 / 282
Simple-Simple hypothesis
If both hypotheses are simple H0 : θ = θ0; H1 : θ = θ1, with priorsP(H0) and P(H1) for the two hypotheses, the posterior probability forH0 is
P(H0|x) =P(x |H0)P(H0)
P(x)
=L(θ0; x)P(H0)
L(θ0; x)P(H0) + L(θ1; x)P(H1),
since P(x |H0) is just L(θ0; x). The Bayes factor is then just likelihoodratio
B =L(θ0; x)
L(θ1; x).
Jonathan Marchini (University of Oxford) BS2a MT 2013 141 / 282
Simple-Composite hypothesis
If one hypothesis is simple and the other composite, for example,H0 : θ = θ0; H1 : π(θ|H1), θ ∈ Θ, with priors P(H0) and P(H1) for thetwo hypotheses, the Bayes factor is
B =L(x ; θ0)∫
Θ L(x ; θ)π(θ|H1)dθ
The denominator is just∫
Θ L(x ; θ)π(θ)dθ when π(θ|H1) is a pdf.
Exercise Show that the posterior probability for H0 is
P(H0|x) =L(θ0; x)P(H0)
P(H0)L(θ0; x) + P(H1)∫
Θ L(x ; θ)π(θ)dθ
when π(θ|H1) is a pdf, in this simple-composite comparison.
Jonathan Marchini (University of Oxford) BS2a MT 2013 142 / 282
ExampleX1, . . . ,Xn are iid N(θ, σ2), with σ2 known.H0 : θ = 0, H1 : θ|H1 ∼ N(µ, τ2). Bayes factor is P0/P1, where
P0 = (2πσ2)−n/2 exp(− 1
2σ2
∑x2
i
)P1 = (2πσ2)−n/2
∫ ∞−∞
exp(− 1
2σ2
∑(xi − θ)2
)×(2πτ2)−1/2 exp
(−(θ − µ)2
2τ2
)dθ.
Completing the square in P1 and integrating dθ,
P1 = (2πσ2)−n/2(
σ2
nτ2 + σ2
)1/2
×exp[−1
2
{n
nτ2 + σ2 (x − µ)2 +1σ2
∑(xi − x)2
}]Jonathan Marchini (University of Oxford) BS2a MT 2013 143 / 282

So
B =
(1 +
nτ2
σ2
)1/2
exp[−1
2
{nx2
σ2 −n
nτ2 + σ2 (x − µ)2}]
Defining t =√
nx/σ, η = −µ/τ, ρ = σ/(τ√
n), this can be written as
B =
(1 +
1ρ2
)1/2
exp[−1
2
{(t − ρη)2
1 + ρ2 − η2}]
This example illustrates a problem choosing the prior. If we take adiffuse prior, for ρ so that ρ→ 0, then B →∞, giving overwelmingsupport for H0.This is an instance of Lindley’s paradox. The point here is that Bcompares the models θ = θ0 and θ ∼ π(·|H1), not the sets θ0 againstθ \ {θ0}. If the π(θ|H1)-prior becomes very diffuse then the averagelikelihood (ie P(H1|x), the marginal likelihood, which is thedenominator of B) goes to zero, while P(H0|x) = L(θ0; x) is fixed.
Jonathan Marchini (University of Oxford) BS2a MT 2013 144 / 282
Lecture 9 : Decision theory
Jonathan Marchini (University of Oxford) BS2a MT 2013 145 / 282
Decision theory
Example You have been exposed to a deadly virus. About 1/3 ofpeople who are exposed to the virus are infected by it, and all thoseinfected by it die unless they receive a vaccine. By the time anysymptoms of the virus show up, it is too late for the vaccine to work.You are offered a vaccine for £500. Do you take it or not?
The most likely scenario is that you don’t have the virus but basing adecision on this ignores the costs (or loss) associated with thedecisions. We would put a very high loss on dying!
Jonathan Marchini (University of Oxford) BS2a MT 2013 146 / 282
Decision Theory
Decision Theory sits ‘above’ Bayesian and classical statisticalinference and gives us a basis to compare different approaches tostatistical inference.We make decisions by applying rules to data.Decisions are subject to risk.A risk function specifies the expected loss which follows from theapplication of a given rule, and this is a basis for comparing rules.We may choose a rule to minimize the maximum risk, or we maychoose a rule to minimize the average risk.
Jonathan Marchini (University of Oxford) BS2a MT 2013 147 / 282

Terminology
θ is the ‘true state of nature’, X ∼ f (x ; θ) is the data.
The Decision rule is δ. If X = x , adopt the action δ(x) given by therule.
Example A single parameter θ is estimated from X = x by δ(x) = θ(x).
The rule θ is the functional form of the estimator. The action is thevalue of the estimator.
The Loss function LS(θ, δ(x)) measures the loss from action δ(x)when θ holds.
Jonathan Marchini (University of Oxford) BS2a MT 2013 148 / 282
ExampleLS(θ, θ(x)) is the loss function which increases for θ(x) being awayfrom θ. Here are three common loss functions.Zero-One loss
LS(θ, θ(x)) =
{0 |θ(x)− θ| < ba |θ(x)− θ| ≥ b
where a,b are constants.
Absolute error loss
LS(θ, θ(x)) = a|θ(x)− θ|
where a > 0.
Quadratic lossLS(θ, θ(x)) = (θ(x)− θ)2.
Jonathan Marchini (University of Oxford) BS2a MT 2013 149 / 282
Example
θ b -‐b
a
θ
θ
Zero-‐One Loss
Absolute error loss
Quadra3c loss
Jonathan Marchini (University of Oxford) BS2a MT 2013 150 / 282
Risk function
Definition The risk function R(θ, δ) is defined as
R(θ, δ) =
∫LS(θ, δ(x))f (x ; θ)dx ,
This is the expected value of the loss (aka expected loss).
Example In the context of point estimation, with Quadratic Loss, therisk function is the mean square error,
R(θ, θ) = E[(θ(X )− θ)2].
Jonathan Marchini (University of Oxford) BS2a MT 2013 151 / 282

Admissible and inadmissible rules.
Definition A procedure δ1 is inadmissible if there exists anotherprocedure δ2 such that
R(θ, δ1) ≥ R(θ, δ2), for all θ ∈ Θ
with R(θ, δ1) > R(θ, δ2) for at least some θ.
A procedure which is not inadmissible is admissible.
Jonathan Marchini (University of Oxford) BS2a MT 2013 152 / 282
ExampleSuppose X ∼ U(0, θ). Consider estimators of the form θ(x) = ax (thisis a family of decisions rules indexed by a).
Show that a = 3/2 is a necessary condition for the rule θ to beadmissible for quadratic loss.
R(θ, θ) =
∫ θ
0(ax − θ)2 1
θdx
= (a2/3− a + 1)θ2
and R is minimized at a = 3/2.
This does not show θ(x) = 3x/2 is admissible here.
It only shows that all estimators with a 6= 3/2 are inadmissible. Theestimator θ(x) = 3x/2 maybe inadmissible relative to other estimatorsnot in this class.
Jonathan Marchini (University of Oxford) BS2a MT 2013 153 / 282
Minimax rules
Definition A rule δ is a minimax rule if maxθ R(θ, δ) ≤ maxθ R(θ, δ′) forany other rule δ′. It minimizes the maximum risk.
Since minimax minimizes the maximum risk (ie, the loss averaged overall possible data X ∼ f ) the choice of rule is not influenced by theactual data X = x (though given the rule δ, the action δ(x) isdata-dependent).
It makes sense when the maximum loss scenario must be avoided, butcan can lead to poor performance on average.
Jonathan Marchini (University of Oxford) BS2a MT 2013 154 / 282
Bayes risk, Bayes rule, expected posterior lossDefinition Suppose we have a prior probability π = π(θ) for θ. Denoteby
r(π, δ) =
∫R(θ, δ)π(θ)dθ
the Bayes risk of rule δ. A Bayes rule is a rule that minimizes theBayes risk. A Bayes rule is sometimes called a Bayes procedure.
Let π(θ|x) =L(x ; θ)π(θ)
h(x)denote the posterior following from likelihood
L and prior π.
Definition The expected posterior loss is defined as∫LS(θ, δ(x))π(θ|x)dθ
Jonathan Marchini (University of Oxford) BS2a MT 2013 155 / 282
Lemma A Bayes rule minimizes the expected posterior loss.
Proof ∫R(θ, δ)π(θ)dθ =
∫ ∫LS(θ, δ(x))L(θ; x)π(θ)dx dθ
=
∫ ∫LS(θ, δ(x))π(θ|x)h(x)dx dθ
=
∫h(x)
(∫LS(θ, δ(x))π(θ|x)dθ
)dx
That is for each x we choose δ(x) to minimize the integral∫LS(θ, δ(x))π(θ|x)dθ
Jonathan Marchini (University of Oxford) BS2a MT 2013 156 / 282
Bayes rules for Point estimationZero-One loss
LS(θ, θ(x)) =
{0 |θ(x)− θ| < ba |θ(x)− θ| ≥ b
where a,b are constants.
We need to minimize∫ ∞−∞
π(θ|x)LS(θ, θ)dθ = a∫ ∞θ+b
π(θ|x)dθ + a∫ θ−b
−∞π(θ|x)dθ
∝ 1−∫ θ+b
θ−bπ(θ|x)dθ
That is we want to maximize∫ θ+b
θ−bπ(θ|x)dθ
Jonathan Marchini (University of Oxford) BS2a MT 2013 157 / 282
Zero-one lossIf π(θ|x) is unimodal the maximum is attained by choosing θ to be themid-point of the interval of length 2b for which π(θ|b) has the samevalue at both ends.
θ
As b → 0, θ → the global mode of the posterior distribution. If π(θ|x) isunimodal and symmetric, the optimal θ is the median (equal to themean and mode) of the posterior distribution.
Jonathan Marchini (University of Oxford) BS2a MT 2013 158 / 282
Absolute error loss
Absolute error loss
LS(θ, θ(x)) = a|θ(x)− θ|
We need to minimise∫|θ − θ|π(θ|x)dθ =
∫ θ
−∞(θ − θ)π(θ|x)dθ +
∫ ∞θ
(θ − θ)π(θ|x)dθ.
Differentiate wrt θ and equate to zero.∫ θ
−∞π(θ|x)dθ −
∫ ∞θ
π(θ|x)dθ = 0
That is, the optimal θ is the median of the posterior distribution.
Jonathan Marchini (University of Oxford) BS2a MT 2013 159 / 282

Quadratic loss
Minimize
Eθ|x [(θ − θ)2] = Eθ|x [(θ − θ + θ − θ)2]
= (θ − θ)2 + 2(θ − θ)Eθ|x (θ − θ) + Eθ|x [(θ − θ)2]
where θ is the posterior mean of θ.
Note θ and θ are constants in the posterior distribution of θ so that(θ − θ)E(θ − θ) = 0. So
Eθ|x [(θ − θ)2] = (θ − θ)2 + Vθ|x (θ)
The Quadratic loss function is minimized when θ = θ, the posteriormean.
Jonathan Marchini (University of Oxford) BS2a MT 2013 160 / 282
Summary
The form of the Bayes rule depends upon the loss function in thefollowing way
Zero-one loss (as b → 0) leads to the posterior mode.Absolute error loss leads to the posterior median.Quadratic loss leads to the posterior mean.
Note These are not the only loss functions one could use in a givensituation, and other loss functions will lead to different Bayes rules.
Jonathan Marchini (University of Oxford) BS2a MT 2013 161 / 282
ExampleX ∼ Binomial (n, θ), and the prior π(θ) is a Beta (α, β) distribution.
E(θ) =α
α + β
The distribution is unimodal if α, β > 1 with mode (α− 1)/(α + β − 2).
The posterior distribution of θ | x is Beta (α + x , β + n − x).
With zero-one loss and b → 0 the Bayes estimator is(α + x − 1)/(α + β + n − 2).
For a quadratic loss function, the Bayes estimator is(α + x)/(α + β + n).
For an absolute error loss function is the median of the posterior.
Jonathan Marchini (University of Oxford) BS2a MT 2013 162 / 282
Lecture 10 : Finding minimax rules. Hypothesis testing with lossfunctions.
Jonathan Marchini (University of Oxford) BS2a MT 2013 163 / 282

Minimax rulesDefinition A rule δ is a minimax rule if maxθ R(θ, δ) ≤ maxθ R(θ, δ′) forany other rule δ′. It minimizes the maximum risk.
Sometimes this doesn’t produce a sensible choice of decision rule.
0.0 0.2 0.4 0.6 0.8 1.0
0.0
0.5
1.0
1.5
e
Ris
k fu
nctio
n
d1
d2
−3 −2 −1 0 1 2 3
0.0
0.1
0.2
0.3
0.4
0.5
e
Ris
k fu
nctio
nd1
d2
Jonathan Marchini (University of Oxford) BS2a MT 2013 164 / 282
Finding minimax rulesTheorem 1 If δ is a Bayes rule for prior π, with r(π, δ) = C, and δ0 is arule for which maxθ R(θ, δ0) = C, then δ0 is minimax.
Proof If for some other rule δ′, maxθ R(θ, δ′) = C − ε for some ε > 0(so δ0 is not minimax), then
r(π, δ′) =
∫R(θ, δ′)π(θ)dθ
≤∫
(C − ε)π(θ)dθ
= (C − ε)< r(π, δ)
so δ is not the Bayes rule for π, a contradiction. [This is an informaltreatment which assumes the min and max exist - see Y&S Ch 2 Sec2.6]
Jonathan Marchini (University of Oxford) BS2a MT 2013 165 / 282
Finding minimax rules
Theorem 2 If δ is a Bayes rule for prior π with the property that R(θ, δ)does not depend on θ, then δ is minimax.
Proof (Y&S Ch 2) Let R(θ, δ) = C (no θ dependence). This implies
r(π, δ) =
∫R(θ, δ)π(θ)dθ = C.
If for some other rule δ′, maxθ R(θ, δ′) = C − ε for some ε > 0 (so δ0 isnot minimax), then we have r(π, δ′) ≤ C − ε. But r(π, δ) = C so δ is notthe Bayes rule for π, a contradiction.
Jonathan Marchini (University of Oxford) BS2a MT 2013 166 / 282
Finding minimax rules
Theorem 2 tells us that
The Bayes estimator with constant risk is minimax.
This result is useful, as it gives an approach to finding minimax rules.
Bayes rules are sometimes easy to compute, so if we find a prior thatyields a Bayes rule with constant risk for all θ we have the minimaxrule.
Jonathan Marchini (University of Oxford) BS2a MT 2013 167 / 282

Example : minimax estimator for quadratic lossX is Binomial (n, θ), and the prior π(θ) is a Beta (α, β) distribution. Fora quadratic loss function, the Bayes estimator is (α + X )/(α + β + n)
The risk function is
EX |θ[(θ − θ)2] = MSE(θ) = [Bias(θ)]2 + Var[θ]
=
[θ − E
(α + X
α + β + n
)]2
+ Var[
α + Xα + β + n
]=
[θ −
(α + nθ
α + β + n
)]2
+nθ(1− θ)
(α + β + n)2
=[θ(α + β)− α]2 + nθ(1− θ)
[α + β + n]2
The Bayes estimator with constant risk is minimax. This occurs whenα = β =
√n/2, so the minimax estimator using quadratic loss is
(α + x)/(α + β + n) = (x +√
n/2)/(n +√
n).Jonathan Marchini (University of Oxford) BS2a MT 2013 168 / 282
Hypothesis testing with loss functions
Suppose Xi ∼ f (x ; θ) iid for i = 1,2, ...,n and we wish to testH0 : θ = θ0 against H1 : θ = θ1.
The decision rule is δC when we use a critical region C so δC(x) = H1if x ∈ C and otherwise δC(x) = H0.
Loss function:
LS(θ, δC(x)) =
a θ = θ0, x ∈ C0 θ = θ0, x 6∈ Cb θ = θ1, x 6∈ C0 θ = θ1, x ∈ C
so the loss for Type I error is a (H0 holds and we accept H1) and theloss for Type II error is b (H1 holds and we accept H0).
Jonathan Marchini (University of Oxford) BS2a MT 2013 169 / 282
Hypothesis testing with loss functionsThe risk function for the rule δC is
R(θ0; δC) =
∫LS(θ0, δC(x))f (x ; θ0)dx
=
∫aI(x ∈ C)f (x ; θ0)dx
= aα
as α = P(X ∈ C|H0) is the probability for Type I error.
SimilarlyR(θ1; δC) = bβ,
as β = P(X 6∈ C|H1) is the probability for a Type II error.
Note α and β are functions of the critical region C.
Jonathan Marchini (University of Oxford) BS2a MT 2013 170 / 282
Hypothesis testing with loss functions
To calculate the Bayes risk we need a prior. Let π(θ0) = p0 andπ(θ1) = p1 be the prior probabilities that H0 and H1 hold.
The Bayes risk is
r(π, δC) =∑
θ∈{θ0,θ1}
R(θ; δC)π(θ)
= p0aα(C) + p1bβ(C).
The Bayes test chooses the critical region C to minimize the Bayesrisk.
Question How do we do this?
Jonathan Marchini (University of Oxford) BS2a MT 2013 171 / 282
Hypothesis testing with loss functionsTo answer this question, let’s revise what we know about Frequentisthypothesis testing.
Neyman-Pearson lemma The best test of size α of H0 vs H1 is alikelihood ratio test with critical region
C′ =
{x ;
L(θ1; x)
L(θ0; x)≥ A
}for some constant A > 0 chosen so that P(X ∈ C′|H0) = α.
By ‘best test’ we mean the test with the highest power, where Power =1 - Type II error.
In frequentist statistics we fix the Type I error (α) and this determinesthe value of A, thus defining the critical region for the test.
Jonathan Marchini (University of Oxford) BS2a MT 2013 172 / 282
Bayes tests
The following theorem tells us how to choose the critical region tominimize the Bayes risk, in the same way that the Neyman-Pearsonlemma tells us how to maximize the power at fixed size.
Theorem The critical region for the Bayes test is the critical region fora LR test with
A =p0ap1b
Every LR test is a Bayes test for some p0,p1.
Jonathan Marchini (University of Oxford) BS2a MT 2013 173 / 282
Proof
The Bayes test minimizes
p0aα + p1bβ = p0aP(X ∈ C|H0) + p1bP(X ∈ C′|H1)
= p0a∫
CL(θ0; x)dx + p1b
∫C′
L(θ1; x)dx
= p0a∫
CL(θ0; x)dx + p1b
[1−
∫C
L(θ1; x)dx]
= p1b +
∫C
[p0aL(θ0; x)− p1bL(θ1; x)
]dx
So choose C such that x ∈ C iff p0aL(θ0; x)− p1bL(θ1; x) ≤ 0, i.e.when
L(θ1; x)
L(θ0; x)≥ p0a
p1b
Jonathan Marchini (University of Oxford) BS2a MT 2013 174 / 282
Example
Let X1, . . . ,Xn be N(µ, σ2) with σ2 known, and we want to testH0 : µ = µ0 vs H1 : µ = µ1, with µ1 > µ0. The critical region for the LRtest
L(θ1; x)
L(θ0; x)≥ A
becomes
x ≥ σ2 log(A)
n(µ1 − µ0)+
12
(µ0 + µ1) = B( say)
In the classical case we ignore the exact value of B, but in a Bayes testA = p0a/(p1b) and we substitute into B. As an example take
µ0 = 0, µ1 = 1, σ2 = 1,n = 4,a = 2,b = 1,p0 = 1/4,p1 = 3/4
Jonathan Marchini (University of Oxford) BS2a MT 2013 175 / 282

Then the Bayes test has critical region
x ≥ 14
log(13× 2
1) +
12
=14
log(23
) +12
= 0.399
For this test (using the fact that X is N(µ,1/4))
α = P(X ≥ 0.3999 | µ = 0, σ2/n = 1/4) = 0.212
andβ = P(X < 0.3999 | µ = 1, σ2/n = 1/4) = 0.115
In a classical approach fixing α = 0.05, B = 1.645√
1/4 = 0.822, so
β = P(X < 0.822 | µ = 1, σ2 = 1/4) = 0.363
In the Bayes test α has been increased and β decreased.
Jonathan Marchini (University of Oxford) BS2a MT 2013 176 / 282
Lecture 11 : Stein’s paradox and the James-Stein estimator. EmpiricalBayes
Jonathan Marchini (University of Oxford) BS2a MT 2013 177 / 282
Stein’s paradox and the James-Stein EstimatorStein’s paradox has been described (Efron, 1992) as ‘the most strikingtheorem of post-war mathematical statistics’!
Theorem Let Xi ∼ N(µi ,1), i = 1,2, ...,p be jointly independent so wehave one data point for each of the p µi -parameters.
Let X = (X1, ...,Xp) and µ = (µ1, ..., µp). The MLE µ for µ is µMLE = X .This estimator is inadmissable for quadratic loss i.e. Risk = MSE.
The result is surprising since the estimator X is the MLE and alsoMVUE.
An estimator with lower risk is given by the James-Stein estimator
µJSE =
(1− a∑
i X 2i
)X
Jonathan Marchini (University of Oxford) BS2a MT 2013 178 / 282
Implications of Stein’s Paradox
Suppose we are interested in estimating1 the weight of a randomly chosen loaf of bread from a supermarket.2 the height of a random chosen blade of grass from a garden.3 the speed of a randomly chosen car as it passes a speed camera.
These are totally unrelated quantities. It seem implausible that bycombining information across the data points that we might end upwith a better way of estimating the vector of three parameters.
The James-Stein estimator tells us that we can get a better estimate(on average) for the vector of three parameters by simultaneouslyusing the three unrelated measurements.
Jonathan Marchini (University of Oxford) BS2a MT 2013 179 / 282
ProofConsider the alternative estimator
µJSE =
(1− a∑
i X 2i
)X (the James-Stein estimator)
Note This estimator ‘shrinks’ X towards 0 (when∑
i X 2i > a).
We will show that if a = p − 2 then R(µ, µJSE ) < R(µ, µMLE ) for everyµ ∈ Rn, so that the MLE is inadmissable in this case.
First, the risk for µMLE is
R(µ, µMLE ) =
p∑i=1
E(|µi − µMLE ,i |2) =
p∑i=1
E(|µi − Xi |2) = p
recognizing Var(Xi) = 1.Jonathan Marchini (University of Oxford) BS2a MT 2013 180 / 282
Stein’s LemmaIn order to calculate R(µ, µJSE ), it is convenient to use Stein’s Lemma,for Normal RV,
E((Xi − µ)h(X )) = E(∂h(X )
∂Xi
).
This can be shown by integrating by parts. Noting∫(xi − µ)e−(xi−µi )
2/2dx = −e−(xi−µi )2/2
we have∫ ∞−∞
(xi − µi)h(x)e−(xi−µi )2/2dxi = −h(x)e−(xi−µi )
2/2∣∣∣xi =∞
xi =−∞
+
∫ ∞−∞
∂h(x)
∂xie−(xi−µi )
2/2dxi
The first term is zero if h(x) (for eg) is bounded, giving the lemma.Jonathan Marchini (University of Oxford) BS2a MT 2013 181 / 282
Proof (continued)
R(µ, µJSE ) =
p∑i=1
E(|µi − µi |2) with µi =
(1− a∑
i X 2i
)Xi
E(|µi − µi |2) = E(|µi − Xi |2)− 2aE
((Xi − µi)Xi∑
j X 2j
)
+a2E
(X 2
i
(∑
j X 2j )2
)
E
((Xi − µi)Xi∑
j X 2j
)= E
(∂
∂Xi
Xi∑j X 2
j
)Stein’s lemma
= E
(∑j X 2
j − 2X 2i
(∑
j X 2j )2
)= E
(1∑j X 2
j− 2
X 2i
(∑
j X 2j )2
)
Jonathan Marchini (University of Oxford) BS2a MT 2013 182 / 282
Putting the pieces together,
p∑i=1
E(|µi − µi |2) = R(µ, µMLE )− (2ap − 4a)E
(1∑j X 2
j
)+ a2E
(1∑j X 2
j
)
= p − (2a(p − 2)− a2)E
(1∑j X 2
j
)
and this is less than p if 2ap − 4a− a2 > 0 and in particular ata = p − 2, which minimizes the risk over a ∈ R.
Note We have not shown that the James Stein estimator is admissible.
Further reading Young and Smith sec 3.4 which covers theJames-Stein estimator is worth reading. It includes a nice example(sec 3.4.1) on the application of the estimator to estimation of baseballhome run rates.
Jonathan Marchini (University of Oxford) BS2a MT 2013 183 / 282

The risk of the James-Stein estimatorRemember R(µ, µMLE ) = p. When a = p − 2
If µi = 0⇒ Xi ∼ N(0,1)⇒∑
j X 2j ∼ χ2
p ⇒ E(
1∑j X 2
j
)= 1/(p − 2)
⇒ R(µ, µJSE ) = 2.
If µi = λ⇒ Xi = λ+ Zi where Zi ∼ N(0,1) and∑
j X 2j ∼ λ2 + χ2
p
⇒ E(
1∑j X 2
j
)→ 0 as λ→∞ so R(µ, µJSE )→ p.
So we get a smaller difference between R(µ, µMLE ) and R(µ, µJSE ) as
E(
1∑j X 2
j
)gets smaller.
Exercise A better estimator is X1p +(
1− aV
)(X − X1p) where
V =∑p
j−1(Xj − X )2 and 1p is p-dimensional vector of 1’s.
Jonathan Marchini (University of Oxford) BS2a MT 2013 184 / 282
Empirical Bayes
Bayes estimators have good risk properties (for example, the posteriormean is usually admissible for quadratic loss).
However, Bayes estimators may be hard to compute (for example, theposterior mean is an integral, or sum), particularly for hierarchicalmodels.
In Empirical Bayes, we use Bayesian reasoning to find estimatorswhich can then be used in classical frequentist. EB uses a particularstrategy to simplify hierarchical models.
Jonathan Marchini (University of Oxford) BS2a MT 2013 185 / 282
Empirical BayesRecall the setup for Bayesian inference for hierarchical models.
X ∼ f (x ; θ)
θ ∼ π(θ;ψ)
ψ ∼ g(ψ)
Our prior for θ has a parameter ψ which also has a prior. The posterioris
π(θ, ψ|x) ∝ L(θ; x)π(θ;ψ)g(ψ)
If we want minimim risk for quadratic loss (for eg) we should use
θ =
∫ ∫θπ(θ, ψ|x)dθdψ
Jonathan Marchini (University of Oxford) BS2a MT 2013 186 / 282
Empirical BayesThe EB trick is to avoid doing ψ-integrals by replacing ψ with anestimate ψ, derived from the data, and consider the model
X ∼ f (x ; θ)
θ ∼ π(θ; ψ)
This EB approximation to the full posterior ’chops off’ a layer of thehierarchy. The reduced model has posterior
π(θ|x) ∝ L(θ; x)π(θ; ψ),
and a Bayes estimator θEB is calculated using π(θ|x). For example, forquadratic loss,
θ =
∫θπ(θ|x)dθ.
Jonathan Marchini (University of Oxford) BS2a MT 2013 187 / 282

Empirical Bayes
We still need an estimator for ψ. There are several choices.
We can use the MLE ψ = arg maxψ p(x |ψ) for ψ in the marginallikelihood
p(x |ψ) =
∫L(θ; x)π(θ;ψ)dθ.
Method of moments estimators are used also.
Jonathan Marchini (University of Oxford) BS2a MT 2013 188 / 282
Example
The James-Stein estimator is an EB-estimator
Data xi ∼ N(θi ,1), i = 1, . . . ,p (so one observation xi for eachparameter θi ). The MLE for θi is simply θMLE ,i = xi . Construct an EBestimator for quadratic loss.
Suppose the prior is θi ∼ N(0, τ2) (we have some freedom here, as weare mainly interested in the risk-related properties of the finalestimator).
If we knew τ we have (completing the square - see Lecture 7 p13)
θi |(xi , τ) ∼ N(
xiτ2
1 + τ2 ,τ2
1 + τ2
).
Jonathan Marchini (University of Oxford) BS2a MT 2013 189 / 282
ExampleTo get an estimate for τ we compute the marginal distribution for Xigiven τ , which is Xi ∼ N(0, τ2 + 1). The MLE for τ is thenτ2 = 1
p∑
i X 2i − 1, and this gives
θEB,i =Xi τ
2
1 + τ2
=
(1− p∑
i X 2i
)Xi
which is the James-Stein estimator
θJS,i =
(1− a∑
i X 2i
)Xi
with a = p. This isn’t the minimum risk JS estimator for quadratic loss,(that is a = p − 2) but it already beats the MLE for all θ. (to get the bestJS estimator (with a = p − 2) use a method of moments estimator forτ . See Young and Smith Section 3.5)
Jonathan Marchini (University of Oxford) BS2a MT 2013 190 / 282
Example
Data xi ∼ Poisson(θi), i = 1, . . . ,n (so one observation xi for eachparameter θi ). The MLE for θi is simply θMLE ,i = xi . Construct an EBestimator for quadratic loss.
Suppose the prior for θi ’s is iid Exponential(λ) i.e. π(θi |λ) = λe−λθi .
p(xi | λ) =
∫ ∞0
e−θiθxii
xi !λe−λθi dθi
=
(1
1 + λ
)xi λ
1 + λ
⇒ given λ the x ′i s are iid geometric (λ/(1 + λ)).
The MLE of λ based on x1, . . . , xn is λ = 1/x , where x = 1n∑n
1 xi .
Jonathan Marchini (University of Oxford) BS2a MT 2013 191 / 282

Now, under the EB simplification, set λ = λ, so that
π(θ|x) ∝ L(θ; x)π(θ|λ) =∏
i
e−θiθxii λe−λθi
and we recognise θi |x ∼ Γ(xi + 1, λ+ 1) in this EB approximation. Thisleads to an estimator
θEB,i =
∫θi π(θi |x)dθi
=xi + 1λ+ 1
= xxi + 1x + 1
We can rewrite this
θEB,i = xi +x
x + 1(x − xi)
showing that this EB estimator shrinks the estimates towards thecommon mean.
Jonathan Marchini (University of Oxford) BS2a MT 2013 192 / 282
Lecture 12 : Markov Chain Monte Carlo. The Metropolis algorithm.
Jonathan Marchini (University of Oxford) BS2a MT 2013 193 / 282
Computationally intensive methodsIn Bayesian inference, the things we need to know are often given interms of intractable integrals or sums.
If x ∼ f (x ; θ) and we have a prior π(θ) on θ ∈ Θ and we want tomeasure the evidence for θ ∈ S, S ⊂ Θ then we might calculate
P(θ ∈ S|x) =
∫Sπ(θ|x)dθ
where π(θ|x) ∝ f (x ; θ)π(θ) is the posterior density.
The posterior mean is commonly the most useful point estimate. Therewe have to compute
Eθ|xθ =
∫Θθπ(θ|x)dθ.
In previous examples our choice of prior has kept calculations doable.Jonathan Marchini (University of Oxford) BS2a MT 2013 194 / 282
Monte Carlo estimationP(θ ∈ S|x) = Eθ|xI(θ ∈ S) and Eθ|xθ are both averages.
If we have N iid samples θ(i) ∼ π(θ|x), i = 1,2, ...,N distributedaccording to the posterior density and we want to estimate a finitemean µf = Eθ|x f (θ) for some given function f , and we take
fN =1N
∑i
f (θ(i))
thenfN
P→ µf ,
that is, fN is consistent for estimation of µf (in fact there is usually aCLT).
But how do we generate the samples θ(i) ∼ π(θ|x), i = 1,2, ...,N?
Jonathan Marchini (University of Oxford) BS2a MT 2013 195 / 282

Markov Chain Monte Carlo estimationThe idea in MCMC is to simulate an ergodic Markov Chainθ(i) i = 1,2, ...,N that has π(θ|x) as its stationary distribution.
Remember a discrete time Markov chain is specified by it’s transitionfunction
P(θ, θ′) = P(θ(t+1) = θ′|θ(t) = θ)
Given θ(0) we use the transition function to draw θ(1), then θ(2) givenθ(1), then θ(3) given θ(2) etc.
So we obtain a sequence θ(0), θ(1), θ(2), θ(3), θ(4), θ(5), θ(6), θ(7), . . .
The sequence of simulated θ-values θ(i) i = 1,2, ...,N is correlated.
Note In what follows we will refer to π(θ|x) as the target, and we willdrop the “|x” while we are setting up the theory.
Jonathan Marchini (University of Oxford) BS2a MT 2013 196 / 282
Markov Chain Monte Carlo estimationHowever, the ergodic theorem for Markov chains from Part A tells usthat
1N
∑i
f (θ(i))P→ µf
so we can use the Markov Chain sequence to form estimates.
The key here is that we can often write down an ergodic Markov chainthat is easy to simulate, and has stationary distribution π(θ|x).
Question If we start from π(θ|x) how do we choose the transitionfunction P(θ, θ′)?
We will learn about two methods to do this1 The Metropolis algorithm2 Gibbs sampling
Jonathan Marchini (University of Oxford) BS2a MT 2013 197 / 282
Metropolis algorithmFor target π(θ|x).
Suppose θ(t) = θ. Simulate a value for θ(t+1) as follows.1 Simulate a candidate state θ′ ∼ q(θ′|θ) i.e. a simple random
change to the state satisfying
q(θ′|θ) = q(θ|θ′)
2 With probability α(θ′|θ), set θ(t+1) = θ′ (accept) and otherwise setθ(t+1) = θ (reject). Here
α(θ′|θ) = min{
1,π(θ′|x)
π(θ|x)
}The overall transition probability from θ to θ′ is
P(θ, θ′) = q(θ′|θ)α(θ′|θ)
Jonathan Marchini (University of Oxford) BS2a MT 2013 198 / 282
Example
In a population of m individuals N are red and m − N are blue, withunknown true value N unknown. A sample of k individuals is taken,with replacement, and X are red. The prior on N is uniform 0 to m.The posterior for N = n is
π(n | x) ∝ nx (m − n)k−x , n ∈ {0,1,2, ...,m}
In this example we can work out posterior probabilities exactly. Let ususe MCMC to estimate posterior probabilities, and check it matchesthe exact result (within Monte Carlo error).
We need to write an MCMC algorithm simulating a Markov chainN(t), t = 0,1,2, ... with the property that N(t) ∼ π(n | x).
Jonathan Marchini (University of Oxford) BS2a MT 2013 199 / 282
ExampleMetropolis algorithm targeting π(n|x). See R code.
Suppose N(t) = n. Simulate a value for N(t+1) as follows.1 Toss a coin and set n′ = n + 1 on a Head and otherwise
n′ = n − 1. So q(n + 1|n) = q(n|n + 1) = 1/2.2 With probability
α(n′|n) = min{
1,π(n′|x)
π(n|x)
}set N(t+1) = n′ and otherwise set N(t+1) = n (reject).
Note that α = 0 if n′ = −1,m + 1 (since π(n′|x) = 0 in those cases)and otherwise
α(n′|n) = min{
1,(n′)x (m − n′)k−x
nx (m − n)k−x
}.
Jonathan Marchini (University of Oxford) BS2a MT 2013 200 / 282
ExampleHere is a plot of showing the results of running the Markov chains for10,000 iterations. (m = 20, x = 3, k = 10)
0 2000 4000 6000 8000 10000
05
1015
20
t
N
Jonathan Marchini (University of Oxford) BS2a MT 2013 201 / 282
ExampleHere is a plot showing the empirical density of the 10,000 samples,together with the true density in red. You can see that approximation isgood.
Histogram of N
N
Density
0 5 10 15 20
0.00
0.05
0.10
0.15
Jonathan Marchini (University of Oxford) BS2a MT 2013 202 / 282
Why does it work?Theorem If θ(t), t = 0,1,2, ... is an irreducible, aperiodic Markov chainon a finite space Θ, satisfying detailed balance with respect to a targetdistribution π(θ) on Θ, and f : Θ→ R is a function with finite mean andvariance in π, then
1N
∑i
f (θ(i))P→ Eπf (θ)
[This is essentially a watered down version of the Ergodic Theorem ofPart A, with positive recurrence replaced by detailed balance]
Suppose Θ is finite. Let
P(n)(θ, θ′) = P(θ(t+n) = θ′|θ(t) = θ)
give the n-step transition probability in a homogeneous Markov chainwith transition probability P(θ, θ′).
Jonathan Marchini (University of Oxford) BS2a MT 2013 203 / 282
Markov ChainsIrreducible
∀θ, θ′ ∈ Θ,∃n such that P(n)(θ, θ′) > 0,
Aperiodic∀θ ∈ Θ,gcd{n : P(n)(θ, θ) > 0} = 1
Detailed balance
π(θ)P(θ, θ′) = π(θ′)P(θ′, θ)
If detailed balance is satisfied the it is easy to show that the chain is astationary distribution ∑
θ∈Θ
π(θ)P(θ, θ′) = π(θ′).
Jonathan Marchini (University of Oxford) BS2a MT 2013 204 / 282
Metropolis algorithmLet us check DB. Assume WLOG π(θ) ≥ π(θ′).
P(θ, θ′)π(θ) = q(θ′|θ)α(θ′|θ)π(θ) = q(θ′|θ) min{
1,π(θ′)
π(θ)
}π(θ)
= q(θ′|θ)π(θ′)
= q(θ|θ′) min{
1,π(θ)
π(θ′)
}π(θ′)
= P(θ′, θ)π(θ′),
since min{
1,π(θ′)
π(θ)
}= π(θ′) and min
{1,π(θ)
π(θ′)
}= 1.
We have shown that the transition probability for the Metropolis updatehas π(θ) as a stationary distribution. If the chain is also irreducible andaperiodic, it will generate the samples we need. These last twoconditions have to be checked separately for each application (but areoften obvious).
Jonathan Marchini (University of Oxford) BS2a MT 2013 205 / 282
ExampleIn Q4 of PS3, we wrote down the posterior distribution for ahierarchical model, but were unable to do anything with it, as theintegrals were intractable.
The observation model is Xi ∼ B(ni ,pi), i = 1,2, ..., k , the priorπ(pi |a,b) is Beta(a,b) and the prior on a,b is the improper priorπ(a,b) ∝ 1/ab on a,b > 0. The posterior density is
π(p,a,b|x) ∝ 1ab
k∏i=1
pxii (1− pi)
ni−xipa−1
i (1− pi)b−1
B(a,b),
with B(a,b) =Γ(a)Γ(b)
Γ(a + b).
Note we used an improper prior - we need to check this is a properposterior distribution.
Jonathan Marchini (University of Oxford) BS2a MT 2013 206 / 282
ExampleUse Monte Carlo to sample
(p(t),a(t),b(t)) ∼ π(p,a,b|x), t = 1,2, ...,T
and use the samples to estimate any posterior expectations of interest.
For example, if we want to estimate a using the posterior mean
a =1T
∑t
a(t).
or the posterior probability that p1 > c,
π(p1 > c|x) =1T
∑t
I(p(t)1 > c).
Jonathan Marchini (University of Oxford) BS2a MT 2013 207 / 282
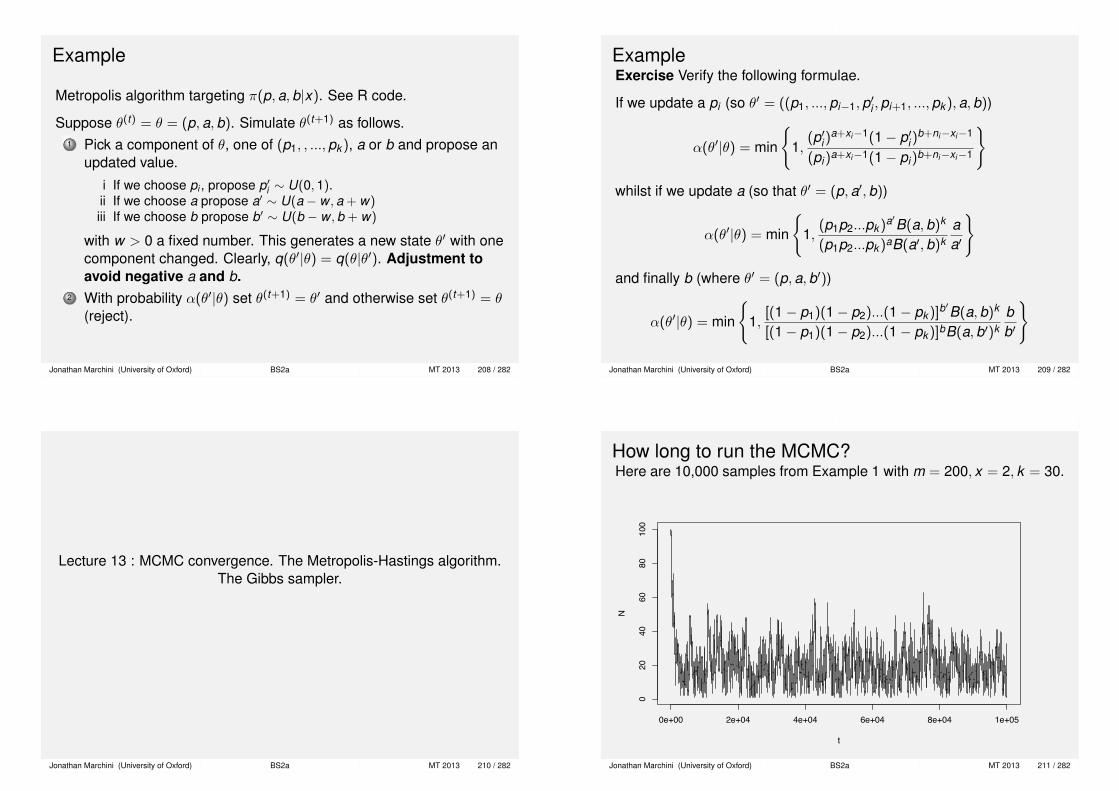
Example
Metropolis algorithm targeting π(p,a,b|x). See R code.
Suppose θ(t) = θ = (p,a,b). Simulate θ(t+1) as follows.1 Pick a component of θ, one of (p1, , ..., pk ), a or b and propose an
updated value.
i If we choose pi , propose p′i ∼ U(0,1).ii If we choose a propose a′ ∼ U(a− w ,a + w)iii If we choose b propose b′ ∼ U(b − w ,b + w)
with w > 0 a fixed number. This generates a new state θ′ with onecomponent changed. Clearly, q(θ′|θ) = q(θ|θ′). Adjustment toavoid negative a and b.
2 With probability α(θ′|θ) set θ(t+1) = θ′ and otherwise set θ(t+1) = θ(reject).
Jonathan Marchini (University of Oxford) BS2a MT 2013 208 / 282
ExampleExercise Verify the following formulae.
If we update a pi (so θ′ = ((p1, ...,pi−1,p′i ,pi+1, ...,pk ),a,b))
α(θ′|θ) = min
{1,
(p′i )a+xi−1(1− p′i )
b+ni−xi−1
(pi)a+xi−1(1− pi)b+ni−xi−1
}
whilst if we update a (so that θ′ = (p,a′,b))
α(θ′|θ) = min
{1,
(p1p2...pk )a′B(a,b)k
(p1p2...pk )aB(a′,b)kaa′
}
and finally b (where θ′ = (p,a,b′))
α(θ′|θ) = min
{1,
[(1− p1)(1− p2)...(1− pk )]b′B(a,b)k
[(1− p1)(1− p2)...(1− pk )]bB(a,b′)kbb′
}
Jonathan Marchini (University of Oxford) BS2a MT 2013 209 / 282
Lecture 13 : MCMC convergence. The Metropolis-Hastings algorithm.The Gibbs sampler.
Jonathan Marchini (University of Oxford) BS2a MT 2013 210 / 282
How long to run the MCMC?Here are 10,000 samples from Example 1 with m = 200, x = 2, k = 30.
0e+00 2e+04 4e+04 6e+04 8e+04 1e+05
020
4060
80100
t
N
Jonathan Marchini (University of Oxford) BS2a MT 2013 211 / 282

Convergence and “burn-in” iterations
The Markov Chain theory that underlies MCMC tells us about the longrun properties of the Markov Chain we have constructed i.e. that thechain will converge to it’s stationary distribution.
Often we will throw away some of the samples at the beginning of thechain. These samples are known as the “burn-in” iterations. Thenumber of burn-in iterations has to be decided upon by the user, butplots of the Markov chain can often help.
Plotting the Markov chain allows us to visually observe when the chainlooks to have converged. A better alternative is to run multiple chainsfrom a diverse set of starting points. If all the chains produce the sameanswer then this can be good evidence that the chains ave converged.
Jonathan Marchini (University of Oxford) BS2a MT 2013 212 / 282
ExampleConsider a Metropolis algorithm for simulating samples from abivariate Normal distribution with mean µ = (0,0) and covariance
Σ =
(1 0.7
√2
0.7√
2 2
)using a proposal distribution for each component
x ′i |xi ∼ U(x − w , x + w) i ∈ {1,2}
The performance of the algorithm can be controlled by setting w .If w is small then we propose only small moves and the chain willmove slowly around the parameter space.If w is large then it is large then we may only accept a few moves.
There is an ‘art’ to implementing MCMC that involves choice of goodproposal distributions.
Jonathan Marchini (University of Oxford) BS2a MT 2013 213 / 282
Example
N = 4 w = 0.1 T = 100
−4 −2 0 2 4
−4−2
02
4
Jonathan Marchini (University of Oxford) BS2a MT 2013 214 / 282
Example
N = 4 w = 0.1 T = 1000
−4 −2 0 2 4
−4−2
02
4
Jonathan Marchini (University of Oxford) BS2a MT 2013 215 / 282
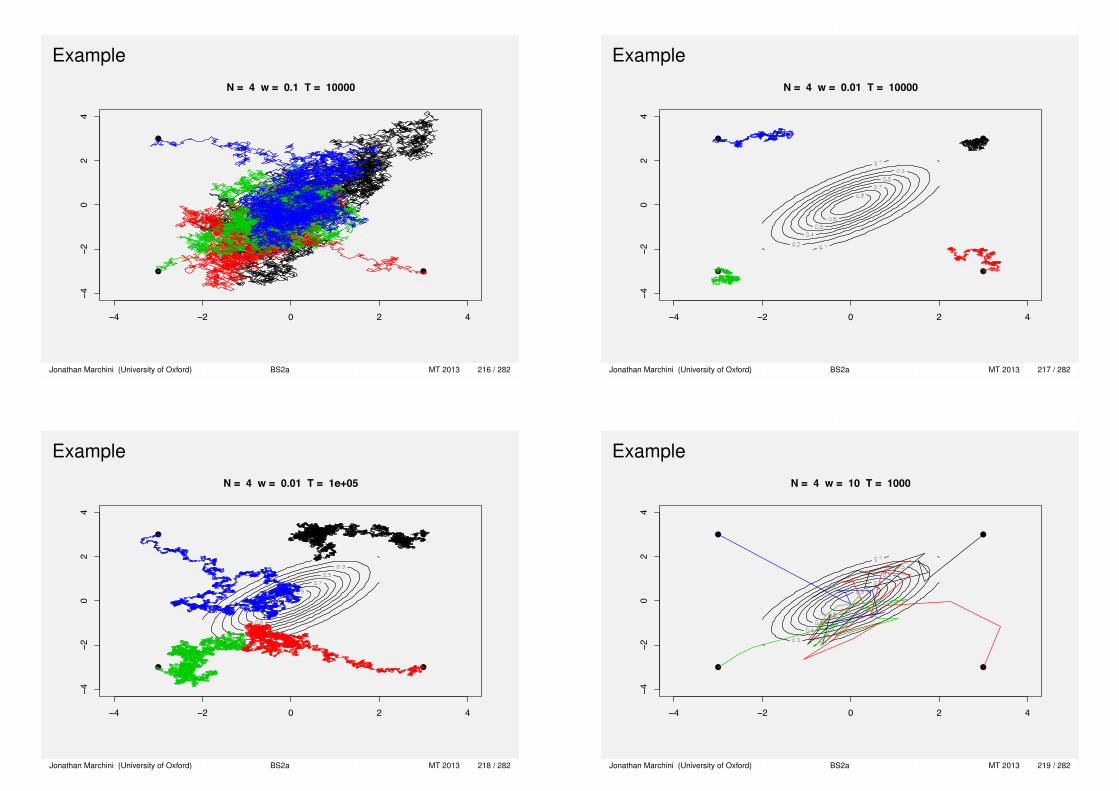
Example
N = 4 w = 0.1 T = 10000
−4 −2 0 2 4
−4−2
02
4
Jonathan Marchini (University of Oxford) BS2a MT 2013 216 / 282
Example
N = 4 w = 0.01 T = 10000
−4 −2 0 2 4
−4−2
02
4
Jonathan Marchini (University of Oxford) BS2a MT 2013 217 / 282
Example
N = 4 w = 0.01 T = 1e+05
−4 −2 0 2 4
−4−2
02
4
Jonathan Marchini (University of Oxford) BS2a MT 2013 218 / 282
Example
N = 4 w = 10 T = 1000
−4 −2 0 2 4
−4−2
02
4
Jonathan Marchini (University of Oxford) BS2a MT 2013 219 / 282

The Metropolis-Hastings algorithmThe Metropolis-Hastings (MH) algorithm generalises the Metropolisalgorithm in two ways
1 The proposal distribution does not need to be symmetric i.e. wecan have
q(θ′|θ) 6= q(θ|θ′)
2 To correct for any asymmetry in the jumping rule the acceptanceratio becomes
α(θ′|θ) = min{
1,π(θ′|x)/q(θ′|θ)
π(θ|x)/q(θ|θ′)
}= min
{1,π(θ′|x)
π(θ|x)
q(θ|θ′)q(θ′|θ)
}
Allowing asymmetric proposals can help the chain to converge faster.Exercise Prove detailed balance for the MH algorithm.
Jonathan Marchini (University of Oxford) BS2a MT 2013 220 / 282
Choosing a proposal distribution
A good proposal distribution has the following properties1 For any θ, it is easy to sample from q(θ′|θ).2 It is easy to compute the acceptance ratio.3 Each proposal goes a reasonable distance in the parameter
space (otherwise the chain moves too slowly).4 The proposals are not rejected too often (otherwise the chain
spends too much time at the same positions).
Jonathan Marchini (University of Oxford) BS2a MT 2013 221 / 282
The Gibbs samplerA Gibbs sampler is a particular type of MCMC algorithm that has beenfound to be very useful in high dimensional problems.
Suppose we wish to sample from π(θ) where θ = (θ1, . . . , θd ). Eachiteration of the Gibbs sampler occurs as follows
1 An ordering of the d components of θ is chosen.2 For each component in this ordering, θj say, we draw a new value
is sampled from the full conditional distribution given all theother components of θ.
θtj ∼ π(θj |θt−1
−j )
where θt−1−j represents all the components of θ, except the for θj , at
their current values
θt−1−j = (θt
1, . . . , θtj−1, θ
t−1j+1 , . . . , θ
t−1d ).
Jonathan Marchini (University of Oxford) BS2a MT 2013 222 / 282
Example
Consider a single observation y = (y1, y2) from a bivariate Normaldistribution with unknown mean θ = (θ1, θ2) and known covariance
Σ =
(1 ρρ 1
). With a uniform prior on θ, the posterior distribution is
θ|y ∼ N(y ,Σ)
In this case the posterior is tractable but we will consider how toconstruct a Gibbs sampler.
We need the two conditional distributions π(θ1|θ2, y) and π(θ2|θ1, y).
Jonathan Marchini (University of Oxford) BS2a MT 2013 223 / 282

Example
π(θ1|θ2, y) ∝ π(θ1, θ2|y)
∝ exp
{− 1
2(θ − y)T Σ−1(θ − y)
}
∝ exp
{− 1
2(1− ρ2)
(θ1 − y1θ2 − y2
)T ( 1 −ρ−ρ 1
)(θ1 − y1θ2 − y2
)}
= exp
{(θ1 − y1)2 + 2ρ(θ1 − y1)(θ2 − y2) + (θ2 − y2)2
}
∝ exp
{− 1
2(1− ρ2)(θ1 − (y1 + ρ(θ2 − y2)))2
}
⇒ θ1|θ2, y ∼ N(y1 + ρ(θ2 − y2),1− ρ2)
Similarly,θ2|θ1, y ∼ N(y2 + ρ(θ1 − y1),1− ρ2)
Jonathan Marchini (University of Oxford) BS2a MT 2013 224 / 282
Example
N = 1 T = 1000
−4 −2 0 2 4
−4−2
02
4
Jonathan Marchini (University of Oxford) BS2a MT 2013 225 / 282
Deriving full conditional distributions
The Gibbs sampler requires us to be able to obtain the full conditionaldistributions of all components of the parameter vector θ.
To determine π(θj |θt−1−j ) we write down the posterior distribution and
consider it as a function of θj .
If we are lucky then we will be able to ‘spot’ the distribution for θj |θt−1−j
(using conjugate priors often helps).
If the full conditional is not of a nice form then this component could besampled using rejection sampling or a MH update could be usedinstead of a Gibbs update.
Jonathan Marchini (University of Oxford) BS2a MT 2013 226 / 282
Gibbs sampling and Metropolis-HastingsGibbs sampling can be viewed as a special case of the MH algorithmwith proposal distributions equal to the full conditionals.
The MH acceptance ratio is min(1, r) where
r =π(θ′)/q(θ′|θt−1)
π(θt−1)/q(θt−1|θ′)
We have θt−1 = (θ1, . . . , θj , . . . , θd ) = (θj , θt−1−j ) and we use proposal
q(θ′|θt−1) = π(θ′j |θt−1−j )
so that θ′ = (θ1, . . . , θ′j , . . . , θd ) = (θ′j , θ
t−1−j ) and
q(θt−1|θ′) = π(θj |θt−1−j )
.Jonathan Marchini (University of Oxford) BS2a MT 2013 227 / 282

Gibbs sampling and Metropolis-HastingsThen the MH acceptance ratio is min(1, r) where
r =π(θ′)/q(θ′j |θt−1)
π(θt−1)/q(θt−1j |θ′)
=π(θ′)/π(θ′j |θ
t−1−j )
π(θt−1)/π(θj |θt−1−j )
But the numerator can be simplified
π(θ′)
π(θ′j |θt−1−j )
=π(θ′j , θ
t−1−j )
π(θ′j |θt−1−j )
= π(θt−1−j )
Similarly the denominator can be simplified
π(θt−1)
π(θj |θt−1−j )
=π(θj , θ
t−1−j )
π(θj |θt−1−j )
= π(θt−1−j )
So we have r =π(θ′)/π(θ′j |θ
t−1−j )
π(θt−1)/π(θj |θt−1−j )
=π(θt−1−j )
π(θt−1−j )
= 1
Thus, every proposed move is accepted.Jonathan Marchini (University of Oxford) BS2a MT 2013 228 / 282
Lecture 14 : Variational Bayes
Jonathan Marchini (University of Oxford) BS2a MT 2013 229 / 282
A key quantity in Bayesian inference is the marginal likelihood of a setof data D given a model M
P(D|M) =
∫P(D|θ,M)P(θ|M)dθ
where θ are the parameters of the model and P(θ|M) is the prior onthe parameters of the model.
The integral required to calculate the marginal likelihood of a givenmodel is not always tractable for some models, so an approximationcan be desirable.
Variational Bayes (VB) is one possibility, that has become reasonablypopular recently.
Jonathan Marchini (University of Oxford) BS2a MT 2013 230 / 282
Variational Bayes
The idea of VB is to find an approximation Q(θ) to a given posteriordistribution P(θ|D,M). That is
Q(θ) ≈ P(θ|D,M)
where θ is the vector of parameters of the model M.
We then use Q(θ) to approximate the marginal likelihood. In fact, whatwe do is find a lower bound for the marginal likelihood.
Question How to find a good approximate posterior Q(θ)?
Jonathan Marchini (University of Oxford) BS2a MT 2013 231 / 282

Kullback-Liebler (KL) divergenceThe strategy we take is to find a distribution Q(θ) that minimizes ameasure of ’distance’ between Q(θ) and the posterior P(θ|D,M).
Definition The Kullback-Leibler divergence KL(q|p) between twodistributions q(x) and p(x) is
KL(q|p) =
∫log[q(x)
p(x)
]q(x)dx
0 5 10 15 20
0.00
0.05
0.10
0.15
0.20
x
dens
ity
q(x)p(x)
0 5 10 15 20−
0.02
0.02
0.06
0.10
x
q(x)
* lo
g(q(
x)/p
(x))
Exercise KL(q|p) ≥ 0 and KL(q|p) = 0 iff q = p.Jonathan Marchini (University of Oxford) BS2a MT 2013 232 / 282
N(µ, σ2) approximations to a Gamma(10,1)
0 5 10 15 20
0.00
0.10
0.20
µ = 10,σ2 = 4,KL = 0.223
x
dens
ity
0 5 10 15 20
0.00
0.10
0.20
µ = 9.11,σ2 = 3.03,KL = 0.124
x
dens
ity
0 5 10 15 20
0.00
0.10
0.20
µ = 13,σ2 = 2.23,KL = 0.347
x
dens
ity
0 5 10 15 20
0.00
0.10
0.20
µ = 9,σ2 = 2,KL = 0.386
x
dens
ity
Jonathan Marchini (University of Oxford) BS2a MT 2013 233 / 282
We consider the KL divergence betweem Q(θ) and P(θ|D,M)
KL(Q(θ)||P(θ|D,M)) =
∫log[ Q(θ)
P(θ|D,M)
]Q(θ)dθ
=
∫log[Q(θ)P(D|M)
P(θ,D|M)
]Q(θ)dθ
= log P(D|M)−∫
log[p(θ,D|M)
Q(θ)
]Q(θ)dθ
The log marginal likelihood can then be written as
log P(D|M) = F (Q(θ)) + KL(Q(θ)||P(θ|D,M)) (1)
where F (Q(θ)) =∫
log[
P(θ,D|M)Q(θ)
]Q(θ)dθ.
Note Since KL(q|p) ≥ 0 we have that
log P(D|M) ≥ F (Q(θ))
so that F (Q(θ)) is a lower bound on the log-marginal likelihood.Jonathan Marchini (University of Oxford) BS2a MT 2013 234 / 282
The mean field approximation
We now need to ask what form that Q(θ) should take?
The most widely used approximation is known as the mean fieldapproximation and assumes only that the approximate posterior hasa factorized form
Q(θ) =∏
i
Q(θi)
The VB algorithm iteratively maximises F (Q(θ)) with respect to thefree distributions, Q(θi), which is coordinate ascent in the functionspace of variational distributions.
We refer to each Q(θi) as a VB component.
We update each component Q(θi) in turn keeping Q(θj) j 6= i fixed.
Jonathan Marchini (University of Oxford) BS2a MT 2013 235 / 282
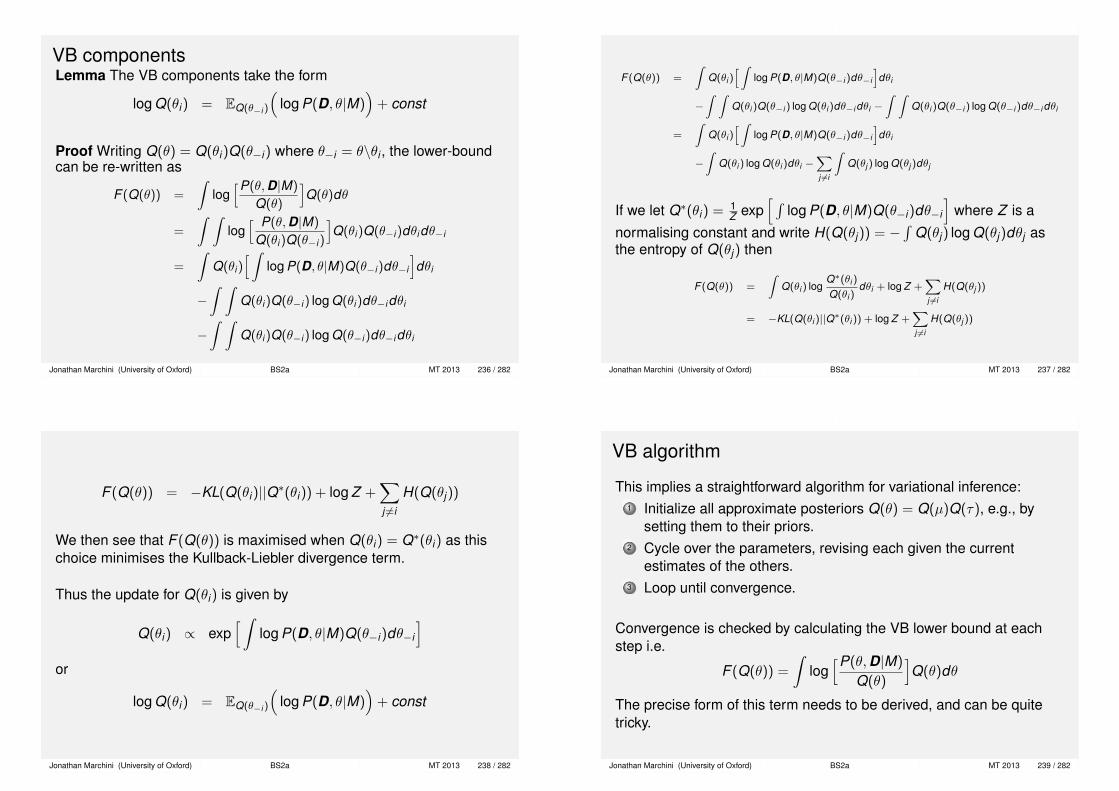
VB componentsLemma The VB components take the form
log Q(θi) = EQ(θ−i )
(log P(D, θ|M)
)+ const
Proof Writing Q(θ) = Q(θi)Q(θ−i) where θ−i = θ\θi , the lower-boundcan be re-written as
F (Q(θ)) =
∫log[P(θ,D|M)
Q(θ)
]Q(θ)dθ
=
∫ ∫log[ P(θ,D|M)
Q(θi )Q(θ−i )
]Q(θi )Q(θ−i )dθidθ−i
=
∫Q(θi )
[ ∫log P(D, θ|M)Q(θ−i )dθ−i
]dθi
−∫ ∫
Q(θi )Q(θ−i ) log Q(θi )dθ−idθi
−∫ ∫
Q(θi )Q(θ−i ) log Q(θ−i )dθ−idθi
Jonathan Marchini (University of Oxford) BS2a MT 2013 236 / 282
F (Q(θ)) =
∫Q(θi )
[ ∫log P(D, θ|M)Q(θ−i )dθ−i
]dθi
−∫ ∫
Q(θi )Q(θ−i ) log Q(θi )dθ−i dθi −∫ ∫
Q(θi )Q(θ−i ) log Q(θ−i )dθ−i dθi
=
∫Q(θi )
[ ∫log P(D, θ|M)Q(θ−i )dθ−i
]dθi
−∫
Q(θi ) log Q(θi )dθi −∑j 6=i
∫Q(θj ) log Q(θj )dθj
If we let Q∗(θi) = 1Z exp
[ ∫log P(D, θ|M)Q(θ−i)dθ−i
]where Z is a
normalising constant and write H(Q(θj)) = −∫
Q(θj) log Q(θj)dθj asthe entropy of Q(θj) then
F (Q(θ)) =
∫Q(θi ) log
Q∗(θi )
Q(θi )dθi + log Z +
∑j 6=i
H(Q(θj ))
= −KL(Q(θi )||Q∗(θi )) + log Z +∑j 6=i
H(Q(θj ))
Jonathan Marchini (University of Oxford) BS2a MT 2013 237 / 282
F (Q(θ)) = −KL(Q(θi)||Q∗(θi)) + log Z +∑j 6=i
H(Q(θj))
We then see that F (Q(θ)) is maximised when Q(θi) = Q∗(θi) as thischoice minimises the Kullback-Liebler divergence term.
Thus the update for Q(θi) is given by
Q(θi) ∝ exp[ ∫
log P(D, θ|M)Q(θ−i)dθ−i
]or
log Q(θi) = EQ(θ−i )
(log P(D, θ|M)
)+ const
Jonathan Marchini (University of Oxford) BS2a MT 2013 238 / 282
VB algorithm
This implies a straightforward algorithm for variational inference:1 Initialize all approximate posteriors Q(θ) = Q(µ)Q(τ), e.g., by
setting them to their priors.2 Cycle over the parameters, revising each given the current
estimates of the others.3 Loop until convergence.
Convergence is checked by calculating the VB lower bound at eachstep i.e.
F (Q(θ)) =
∫log[P(θ,D|M)
Q(θ)
]Q(θ)dθ
The precise form of this term needs to be derived, and can be quitetricky.
Jonathan Marchini (University of Oxford) BS2a MT 2013 239 / 282

Example 1Consider applying VB to the hierarchical model
Di ∼ N(µ, τ−1) i = 1, . . . ,P, µ ∼ N(m, (τβ)−1) τ ∼ Γ(a,b)
Note We are using a prior of the form π(τ, µ) = π(µ|τ)π(τ).
Let θ = (µ, τ) and assume Q(θ) = Q(µ)Q(τ).
We will use notation 〈θi〉 = EQ(θ−i )θi .
The log joint density is
log P(D, θ|M) =P2
log τ − τ
2
P∑i=1
(Di − µ)2 +12
log τ − τβ
2(µ−m)2
+(a− 1) log τ − bτ + K
Jonathan Marchini (University of Oxford) BS2a MT 2013 240 / 282
log P(D, θ|M) =P2
log τ − τ
2
P∑i=1
(Di − µ)2 +12
log τ − τβ
2(µ−m)2
+(a− 1) log τ − bτ + K
We can derive the VB updates one at a time. We start with Q(µ). NoteWe just need to focus on terms involving µ.
log Q(µ) = EQ(τ)
(log P(D, θ|M)
)+ C
= −〈τ〉2
( P∑i=1
(Di − µ)2 − β(µ−m)2)
+ C
where 〈τ〉 = EQ(τ)(τ). We will be able to determine 〈τ〉 when we derivethe other component of the approximate density, Q(τ).
Jonathan Marchini (University of Oxford) BS2a MT 2013 241 / 282
We can see this log density has the form of a normal distribution
log Q(µ) = −〈τ〉2
( P∑i=1
(Di − µ)2 − β(µ−m)2)
+ C
= −β′
2(µ−m′)2
where
β′ = (β + P) 〈τ〉
m′ = β′−1(βm +
P∑i=1
Di
)Thus Q(µ) = N(µ|m′, β′−1).
Jonathan Marchini (University of Oxford) BS2a MT 2013 242 / 282
log P(D, θ|M) =P2
log τ − τ
2
P∑i=1
(Di − µ)2 +12
log τ − τβ
2(µ−m)2
+(a− 1) log τ − bτ + K
The second component of the VB approximation is derived as
log Q(τ) = EQ(µ)
(log P(D, θ|M)
)+ C
= ((P + 1)/2 + a− 1) log τ − τ
2
⟨P∑
i=1
(Di − µ)2
⟩
−τ2
⟨β(µ−m)2
⟩+ C
Jonathan Marchini (University of Oxford) BS2a MT 2013 243 / 282
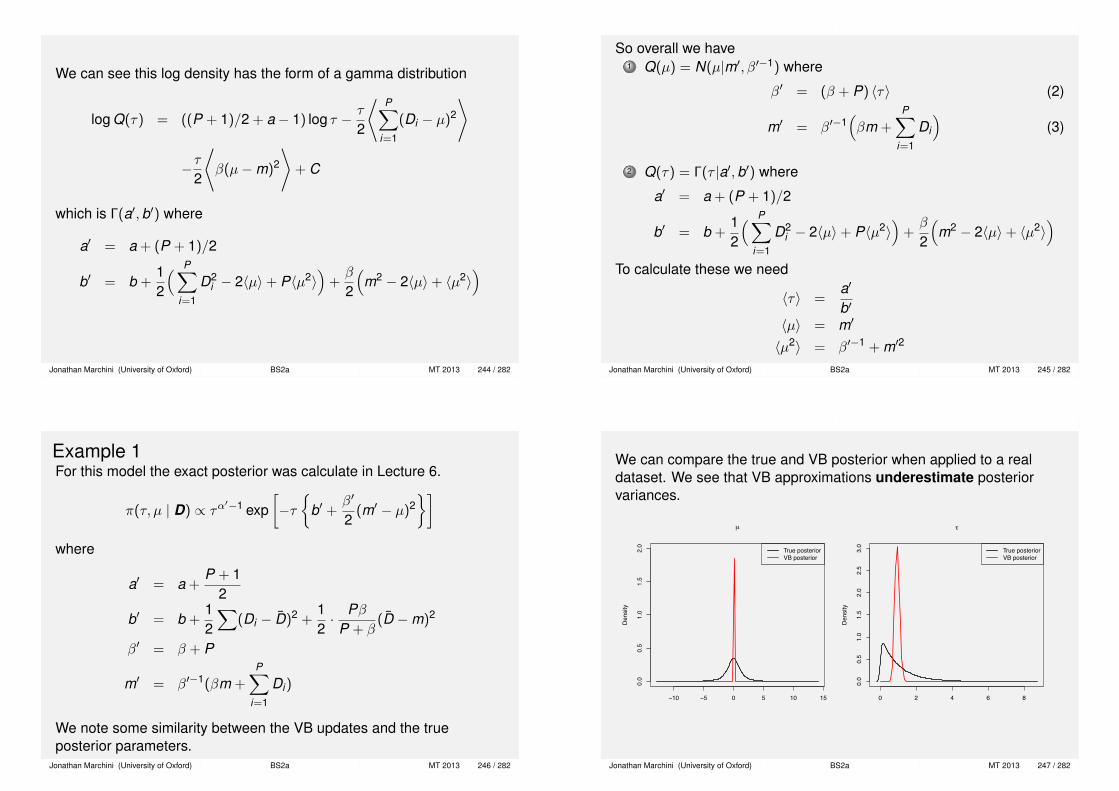
We can see this log density has the form of a gamma distribution
log Q(τ) = ((P + 1)/2 + a− 1) log τ − τ
2
⟨P∑
i=1
(Di − µ)2
⟩
−τ2
⟨β(µ−m)2
⟩+ C
which is Γ(a′,b′) where
a′ = a + (P + 1)/2
b′ = b +12
( P∑i=1
D2i − 2〈µ〉+ P〈µ2〉
)+β
2
(m2 − 2〈µ〉+ 〈µ2〉
)
Jonathan Marchini (University of Oxford) BS2a MT 2013 244 / 282
So overall we have1 Q(µ) = N(µ|m′, β′−1) where
β′ = (β + P) 〈τ〉 (2)
m′ = β′−1(βm +
P∑i=1
Di
)(3)
2 Q(τ) = Γ(τ |a′,b′) where
a′ = a + (P + 1)/2
b′ = b +12
( P∑i=1
D2i − 2〈µ〉+ P〈µ2〉
)+β
2
(m2 − 2〈µ〉+ 〈µ2〉
)To calculate these we need
〈τ〉 =a′
b′〈µ〉 = m′
〈µ2〉 = β′−1 + m′2
Jonathan Marchini (University of Oxford) BS2a MT 2013 245 / 282
Example 1For this model the exact posterior was calculate in Lecture 6.
π(τ, µ | D) ∝ τα′−1 exp[−τ{
b′ +β′
2(m′ − µ)2
}]where
a′ = a +P + 1
2
b′ = b +12
∑(Di − D)2 +
12· Pβ
P + β(D −m)2
β′ = β + P
m′ = β′−1(βm +P∑
i=1
Di)
We note some similarity between the VB updates and the trueposterior parameters.
Jonathan Marchini (University of Oxford) BS2a MT 2013 246 / 282
We can compare the true and VB posterior when applied to a realdataset. We see that VB approximations underestimate posteriorvariances.
−10 −5 0 5 10 15
0.0
0.5
1.0
1.5
2.0
µ
Den
sity
True posteriorVB posterior
0 2 4 6 8
0.0
0.5
1.0
1.5
2.0
2.5
3.0
o
Den
sity
True posteriorVB posterior
Jonathan Marchini (University of Oxford) BS2a MT 2013 247 / 282

General comments
The property of VB underestimating the variance in the posterioris a general feature of the method, when there exists correlationbetween the θi ’s in the posterior, which is usually the case. Thismay not be important if the purpose of inference is modelcomparison i.e. comparing the approximate marginal likelihoodsbetween models.VB is often much, much faster to implement than MCMC or othersampling based methods.The VB updates and lower bound can be tricky to derive, andsometime further approximation is needed.The VB algorithm will find a local mode of the posterior, so careshould be taken when the posterior is thought/known to bemulti-modal.
Jonathan Marchini (University of Oxford) BS2a MT 2013 248 / 282
Laplace’s methodConsider the integral ∫
eNf (x)dx
Expanding f (x) around a maximum point x0 we have
f (x) ≈ f (x0) + f ′(x0)(x − x0) +12
f ′′(x0)(x − x0)2
= ≈ f (x0)− 12|f ′′(x0)|(x − x0)2
and we can approximate the integral as∫eNf (x)dx ≈ eNf (x0)
∫exp
{− N
2|f ′′(x0)|(x − x0)2
}dx
Comparing to a normal pdf we have∫eNf (x)dx ≈ eNf (x0)(2π)
12 N−
12 |f ′′(x0)|−
12
Jonathan Marchini (University of Oxford) BS2a MT 2013 249 / 282
Laplace’s method
For a d-dimensional function the analogue of this result is∫eNf (x)dx ≈ eNf (x0)(2π)
d2 N−
d2 |f ′′(x0)|−
12
where |f ′′(x0)| is the determinant of the Hessian of the functionevaluated at x0.
Jonathan Marchini (University of Oxford) BS2a MT 2013 250 / 282
Laplace approximation
We apply Laplace’s method to the integral that is the marginallikelihood in Bayesian inference, as follows
P(θ|D,M) ∝∫
P(D|θ,M)P(θ|M)dθ
=
∫exp
{N( 1
Nlog P(D|θ,M) +
1N
log P(θ|M))}
dθ
here we have
f (x) =1N
log P(D|θ,M) +1N
log P(θ|M)
Jonathan Marchini (University of Oxford) BS2a MT 2013 251 / 282

Laplace approximation
We let θ be the (vector) value of θ that maximizes the posterior
θ = arg maxθ
P(θ|D,M)
This is known as the maximum a posteriori (MAP) estimate of θ.
This leads to
log P(θ|D,M) ≈ log P(D|θ,M)+log P(θ|M)+d2
log 2π+12
log |f ′′(θ)−1|−d2
log N
Jonathan Marchini (University of Oxford) BS2a MT 2013 252 / 282
Bayesian Information Criterion (BIC)
The Bayesian Information Criterion (BIC) takes the approximation onestep further, essentially by minimizing the impact of the prior.
Firstly, the MAP estimate θ is replaced by the MLE θ, which isreasonable if the prior has a small effect.
Secondly, BIC only retains the terms that vary in N, sinceasymptotically the terms that are constant in N do not matter.
Dropping the constant terms we get,
log P(θ|D,M) ≈ log P(D|θ,M)− d2
log N
Jonathan Marchini (University of Oxford) BS2a MT 2013 253 / 282
Lecture 15 : The EM algorithm
Jonathan Marchini (University of Oxford) BS2a MT 2013 254 / 282
An expectation-maximization (EM) algorithm is an iterative method forfinding maximum likelihood or maximum a posteriori (MAP) estimatesof parameters in statistical models, where the model depends onunobserved latent variables. So called ’missing data’ problems arewidespread in many application areas of statistics.
We will consider the general set up where
X = Observed dataZ = Missing or unobserved dataθ = Model parameters
`(θ) = log L(θ; X )
Jonathan Marchini (University of Oxford) BS2a MT 2013 255 / 282

Example
Suppose we observed data X1, . . . ,XM from the following model
p(Zi = 1) = p(Zi = 2) =12, Xi |Zi ∼ N(θZi ,1)
So we observe the Xi ’s but not the Zi ’s or θ and want to estimate θ.
x
Fre
quen
cy
0 2 4 6
02
46
810
Note If we knew the Zi ’s this would be an easy problem, but wedon’t...hence the need for the EM algorithm.
Jonathan Marchini (University of Oxford) BS2a MT 2013 256 / 282
Overview of EM algorithmThe EM algorithm is an iterative algorithm for maximising thelog-likelihood `(θ) that proceeds as follows
1 Set t = 0 and pick a initial value θt .2 E-Step Calculate the expected log-likelihood of the ’full data’
likelihoodEp(Z |X ,θt )
[log P(X ,Z |θ)
]where the expectation is wrt p(Z |X , θt ) i.e. the conditionaldistribution of the missing data Z given and observed data X andθt .
3 M-Step Set θt+1 = arg maxθ Ep(Z |X ,θt )
[log P(X ,Z |θ)
]4 Iterate steps 2 and 3 until convergence.
Question Why does this work?
Jonathan Marchini (University of Oxford) BS2a MT 2013 257 / 282
`(θ) = log P(X |θ) = logP(X ,Z |θ)
P(Z |X , θ)= log P(X ,Z |θ)− log P(Z |X , θ)
Now take expectations wrt to a distribution q(Z )
`(θ) =
∫log P(X ,Z |θ)q(Z )dZ −
∫log P(Z |X , θ)q(Z )dZ
=
∫log P(X ,Z |θ)q(Z )dZ −
∫log q(Z )q(Z )dz
+
∫log q(Z )q(Z )dz −
∫log P(Z |X , θ)q(Z )dZ
= Eq(Z )
[log P(X ,Z |θ)
]+ H(q(Z )) + KL(q(Z )|P(Z |X , θ))
`(θ) ≥ Eq(Z )
[log P(X ,Z |θ)
]+ H(q(Z ))
where H(q(Z )) = −∫
log q(Z )q(Z )dz is known as the Entropy of q(Z ).
Jonathan Marchini (University of Oxford) BS2a MT 2013 258 / 282
E-StepNow set q(Z ) = P(Z |X , θt ). Then we have
`(θ) ≥ EP(Z |X ,θt )
[log P(X ,Z |θ)
]+ H(q(Z ))
with equality at θ = θt i.e. we have a lower bound for `(θ).
ℓ θ( )
θt
Jonathan Marchini (University of Oxford) BS2a MT 2013 259 / 282

M-StepWe then obtain an updated estimate θt+1 by maximizing this lowerbound
θt+1 = arg maxθ
EP(Z |X ,θt )
[log P(X ,Z |θ)
]since H(q(Z )) is not a function of θ.
ℓ θ( )
θt θt+1
Jonathan Marchini (University of Oxford) BS2a MT 2013 260 / 282
ExampleSuppose we observed data X1, . . . ,XM from the following model
p(Zi = 1) = p(Zi = 2) =12, Xi |Zi ∼ N(θZi ,1)
So we observe the Xi ’s but not the Zi ’s or θ and want to estimate θ.
x
Fre
quen
cy
0 2 4 6
02
46
810
Jonathan Marchini (University of Oxford) BS2a MT 2013 261 / 282
The log-likelihood is
`(θ) = log P(X |θ) = logM∏
i=1
2∑k=1
P(xi |zi = k , θ)p(zi = k)
The full data likelihood and it’s logarithm are given by
P(X ,Z |θ) =M∏
i=1
P(xi |zi , θ)p(zi) =M∏
i=1
N(xi : θzi ,1) · 12
log P(X ,Z |θ) = −12
M∑i=1
(xi − θzi)2 + K
Jonathan Marchini (University of Oxford) BS2a MT 2013 262 / 282
E-Step For θt we then calculate the conditional distribution of themissing data P(Z |X , θt ). This can be done one Zi at a time.
pikt = P(Zi = k |Xi , θt ) ∝ exp(− 1
2(xi − kθt )
2)
Then calculate the expectation of the log of the full data likelihood
E[
log P(X ,Z |θ)]
= −12
M∑i=1
2∑k=1
(xi − θk)2pikt
= −12
M∑i=1
(xi − θ)2pi1t + (xi − 2θ)2pi2t
= −12θ2∑
i
(pi1t + 4pi2t ) + θ∑
i
xi(pi1t + 2pi2t ) + C
Jonathan Marchini (University of Oxford) BS2a MT 2013 263 / 282
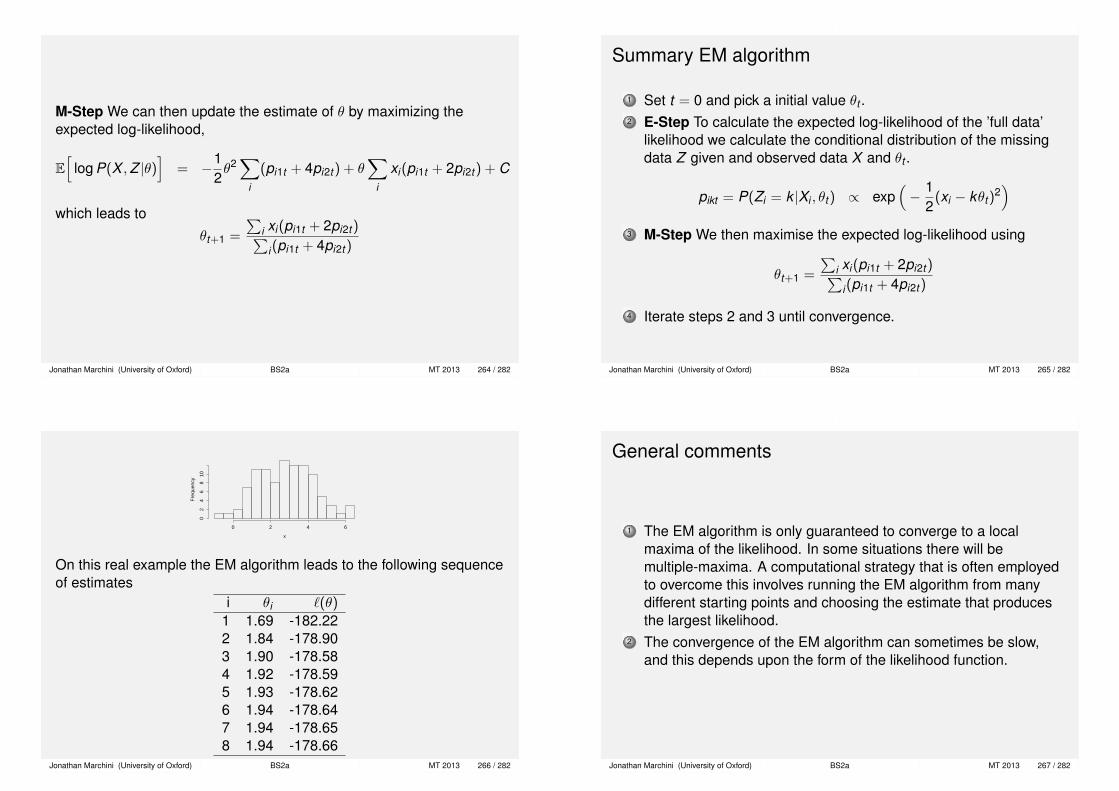
M-Step We can then update the estimate of θ by maximizing theexpected log-likelihood,
E[
log P(X ,Z |θ)]
= −12θ2∑
i
(pi1t + 4pi2t ) + θ∑
i
xi(pi1t + 2pi2t ) + C
which leads toθt+1 =
∑i xi(pi1t + 2pi2t )∑
i(pi1t + 4pi2t )
Jonathan Marchini (University of Oxford) BS2a MT 2013 264 / 282
Summary EM algorithm
1 Set t = 0 and pick a initial value θt .2 E-Step To calculate the expected log-likelihood of the ’full data’
likelihood we calculate the conditional distribution of the missingdata Z given and observed data X and θt .
pikt = P(Zi = k |Xi , θt ) ∝ exp(− 1
2(xi − kθt )
2)
3 M-Step We then maximise the expected log-likelihood using
θt+1 =
∑i xi(pi1t + 2pi2t )∑
i(pi1t + 4pi2t )
4 Iterate steps 2 and 3 until convergence.
Jonathan Marchini (University of Oxford) BS2a MT 2013 265 / 282
x
Fre
quen
cy
0 2 4 6
02
46
810
On this real example the EM algorithm leads to the following sequenceof estimates
i θi `(θ)
1 1.69 -182.222 1.84 -178.903 1.90 -178.584 1.92 -178.595 1.93 -178.626 1.94 -178.647 1.94 -178.658 1.94 -178.66
Jonathan Marchini (University of Oxford) BS2a MT 2013 266 / 282
General comments
1 The EM algorithm is only guaranteed to converge to a localmaxima of the likelihood. In some situations there will bemultiple-maxima. A computational strategy that is often employedto overcome this involves running the EM algorithm from manydifferent starting points and choosing the estimate that producesthe largest likelihood.
2 The convergence of the EM algorithm can sometimes be slow,and this depends upon the form of the likelihood function.
Jonathan Marchini (University of Oxford) BS2a MT 2013 267 / 282
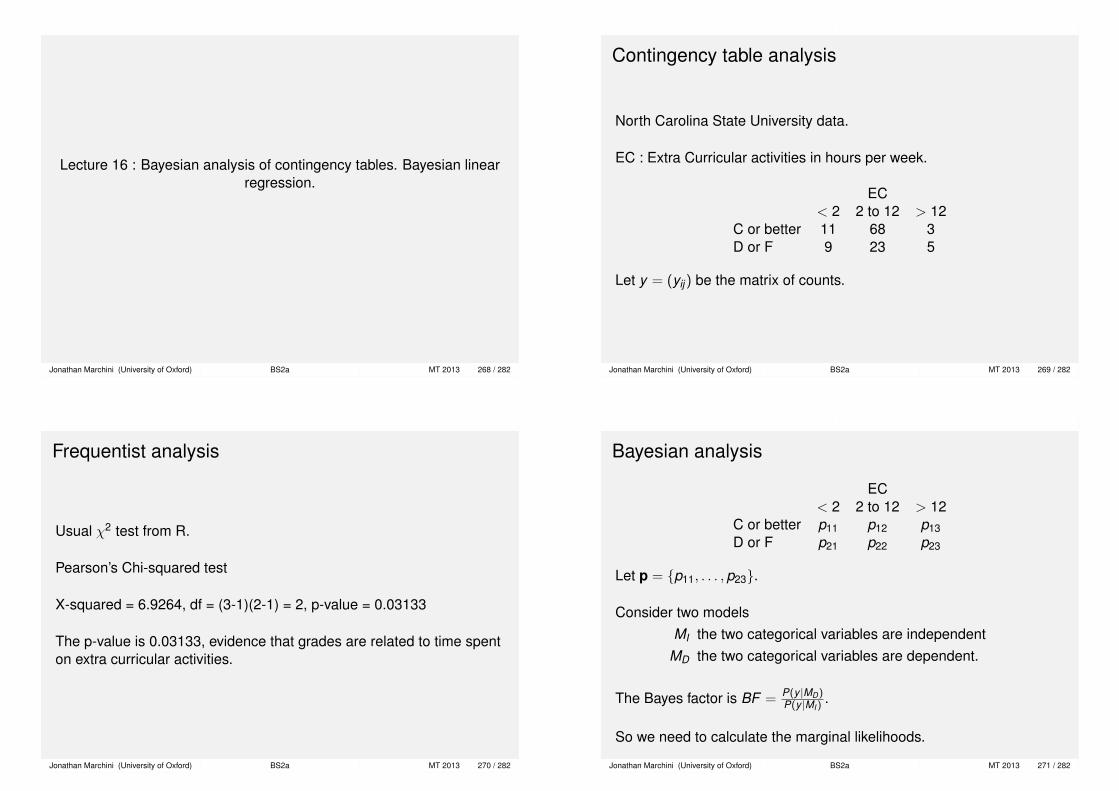
Lecture 16 : Bayesian analysis of contingency tables. Bayesian linearregression.
Jonathan Marchini (University of Oxford) BS2a MT 2013 268 / 282
Contingency table analysis
North Carolina State University data.
EC : Extra Curricular activities in hours per week.
EC< 2 2 to 12 > 12
C or better 11 68 3D or F 9 23 5
Let y = (yij) be the matrix of counts.
Jonathan Marchini (University of Oxford) BS2a MT 2013 269 / 282
Frequentist analysis
Usual χ2 test from R.
Pearson’s Chi-squared test
X-squared = 6.9264, df = (3-1)(2-1) = 2, p-value = 0.03133
The p-value is 0.03133, evidence that grades are related to time spenton extra curricular activities.
Jonathan Marchini (University of Oxford) BS2a MT 2013 270 / 282
Bayesian analysis
EC< 2 2 to 12 > 12
C or better p11 p12 p13D or F p21 p22 p23
Let p = {p11, . . . ,p23}.
Consider two modelsMI the two categorical variables are independent
MD the two categorical variables are dependent.
The Bayes factor is BF = P(y |MD)P(y |MI)
.
So we need to calculate the marginal likelihoods.
Jonathan Marchini (University of Oxford) BS2a MT 2013 271 / 282

The Dirichlet distributionDirichlet integral∫
z1+···+zk =1zν1−1
1 · · · zνk−1k dz1 · · · dzk =
Γ(ν1) · · · Γ(νk )
Γ(∑νi)
Dirichlet distribution
Γ(∑νi)
Γ(ν1) · · · Γ(νk )zν1−1
1 · · · zνk−1k , z1 + · · ·+ zk = 1
The means are E[Zi ] = νi/∑νi , i = 1, . . . , k .
A representation that makes the Dirichlet easy to simulate from is thefollowing.
Let W1, . . . ,Wk be independent Gamma (ν1), . . . Gamma (νk ) randomvariables, W =
∑Wi and set Zi = Wi/W , i = 1, . . . , k .
Jonathan Marchini (University of Oxford) BS2a MT 2013 272 / 282
Examples of 3D Dirichlet distributions
Jonathan Marchini (University of Oxford) BS2a MT 2013 273 / 282
Calculating marginal likelihoods
P(y |MD) =
∫p
P(y |p)π(p)dp
=
∫p11+···+p23=1
(|y |y
)∏ij
(pij)yij π(p)dp11 · · · dp23
where (|y |y
)= (∑
yij)!/∏
yij !
Under MD choose a uniform distribution for p i.e. Dirichlet(1, . . . ,1)
⇒ π(p) = Γ(RC), p11 + · · ·+ p23 = 1
Jonathan Marchini (University of Oxford) BS2a MT 2013 274 / 282
Calculating marginal likelihoods
P(y |MD) =
(|y |y
)Γ(RC)
∫p11+···+p23=1
∏ij
(pij)yij dp11 · · · dp23
=
(|y |y
)Γ(RC)
∏Γ(yij + 1)
Γ(|y |+ RC)
=
(|y |y
)D(y + 1)
D(1RC)
whereD(ν) =
∏Γ(νi)/Γ(
∑νi)
and y + 1 denotes the matrix of counts with 1 added to all entries and1RC denotes a vector of length RC with all entries equal to 1.
Jonathan Marchini (University of Oxford) BS2a MT 2013 275 / 282

Calculating marginal likelihoodsUnder MI the probabilities are determined by the marginal probabilitiespr = {p1·,p2,·} and pc = {p·1,p·2,p·3}
EC< 2 2 to 12 > 12
C or better p11 p12 p13 p1·D or F p21 p22 p23 p2·
p·1 p·2 p·3
Under MI we have a table where pij = pi·p·j .
Under independence MI the row sums and column sums have aDirichlet distribution (with R=2 and C = 3 respectively)
π(pr ) =Γ(R)∏
Γ(1)p1−1
1· · · · p1−1R· = Γ(R), π(pc) =
Γ(C)∏Γ(1)
p1−1·1 · · · p1−1
·C = Γ(C)
Jonathan Marchini (University of Oxford) BS2a MT 2013 276 / 282
The marginal likelihood under MI is therefore
P(y |MI) =
(|y |y
)∫pr
∫pc
∏ij
(pi·p·j
)yij π(pr )π(pc)dpr dpc
=
(|y |y
)Γ(R)Γ(C)
∫pr
∏i
(pi·)yi· dpr
∫pc
∏j
(p·j)y·j dpc
=
(|y |y
)Γ(R)Γ(C)
∏Γ(yi· + 1)
Γ(|y |+ R)
∏Γ(y·j + 1)
Γ(|y |+ C)
=
(|y |y
)D(yR + 1)D(yC + 1)
D(1R)D(1C)
Jonathan Marchini (University of Oxford) BS2a MT 2013 277 / 282
Bayes FactorCombining the two marginal likelihoods we get the Bayes Factor
BF =P(y |MD)
P(y |MI)=
D(y + 1)D(1R)D(1C)
D(1RC)D(yR + 1)D(yC + 1)
Our data is
11 68 3 829 23 5 37
20 91 8 119
The Bayes factor is
11!68!3!9!23!5!1!2!
124!× 120!121!
5!20!91!8!82!37!= 1.66
which gives modest support against independence.Jonathan Marchini (University of Oxford) BS2a MT 2013 278 / 282
Normal Linear regression model
Model: Response variable y , predictor variables x1, . . . , xk .
E(
yi | β,X ) = β1xi1 + · · ·βkxik , i = 1, . . . ,n
In terms of vectors xi = (xi1, . . . , xik ) and β = (β1, . . . , βk )′,
E(
yi | β,X)
= xiβ
{yi} are conditionally independent given values of the parameters andthe predictor variables.
Jonathan Marchini (University of Oxford) BS2a MT 2013 279 / 282

Normal Linear regression modelAssume that
var(yi | θ,X ) = σ2
where unknown parameters are
θ = (β, σ2)
Assume that the errors
εi = yi − E(
yi | β,X)
are independent with mean 0 and variance σ2.That is
y | β, σ2,X ∼ Nn(Xβ, σ2I)
Bayesian formulation: Assume that (β, σ2) have a non-informative prior
g(β, σ2) ∝ 1σ2
Jonathan Marchini (University of Oxford) BS2a MT 2013 280 / 282
Posterior distribution
q(β, σ2|y) = q(β | y , σ2)q(σ2 | y)
The first density on the right is multivariate normal with mean β andcovariance matrix Vβσ2, where
β = (X ′X )−1X ′y , Vβ = (X ′X )−1
Define the inverse gamma (a,b) density as proportional to
y−a−1 exp{−b/y}
then the marginal posterior of σ2 is inverse gamma ((n − k)/2,S/2),where
S = (y − X β)′(y − X β)
Jonathan Marchini (University of Oxford) BS2a MT 2013 281 / 282
The posterior density comes from a classical factorization of thelikelihood
1(2πσ2)n/2 exp
{− 1
2σ2 (y − Xβ)′(y − Xβ)}
knowing that
(y − Xβ)′(y − Xβ) = (y − X β)′(y − X β) + (β − β)′X ′X (β − β)
Jonathan Marchini (University of Oxford) BS2a MT 2013 282 / 282


















