Universally Composable Synchronous Computation | SpringerLink

Formulations of Calculating Load Forces for Universally
Loaded Bearings
Zhan Wang
September 25, 2014
This document is based on the [1], [2, chap.7] and [3, chap.1]. Most of the formulas arereformations of the formulas given in [1]. Most of the figures come from [2, chap.7] and [3,chap.1]. The detail deriving process can be found in [3, chap.1].
1 Input Parameters
All symbols used in this document is list in Table 1. They are the same as symbols defined in[1, p. 2,3,4].
Table 1: Symbols (o: output value; i: given internally, depend onthe bearing type.)
Name Input Cal. Const. DescriptionA x x distance, in millimeters, between raceway groove curvature centers
of ball bearing having no clearance and having an initial contactangle
A′j x distance, in millimeters, between raceway groove curvature centersof ball bearing at the position where element j locates, when theload is applied
cP x x spring constant, in newtons per millimeter to the power of 3/2, ofa rolling element with point contact
cs x x spring constant, in newtons per millimeter to the power of 8/9, ofa roller lamina
Dpw x x pitch diameter, in millimeters, of ball or roller setDw x x nominal ball diameter or roller diameter (maximum or in the mid-
dle), in millimetersDwe x x roller diameter at the contact point, in millimeters, applicable in
the calculation of load ratingsE x x modulus of elasticity, in megapascalsE(χ) x x complete elliptic integral of the second kinde subscript for outer ring or housing washer
1

fe x outer-race conformityfi x inner-race conformityfp x conformity of roller crown radiusF (ρ) x x relative curvature differenceFa o bearing axial load (axial component of actual bearing load), in
newtonsFr o bearing radial load (radial component of actual bearing load), in
newtonsi subscript for inner ring or shaft washerK(χ) x x complete elliptic integral of the first kindLwe x x effective roller length, in millimeters, applicable in the calculation
of load ratingsMX o moment, in newton millimeters, acting on tilted bearingns x x number of laminaeP (x) i x profile function, in millimetersRi x x distance, in millimeters, between the center of curvature of the
inner race groove and the axis of rotationRp x x roller crown radiusre x x cross-sectional raceway groove radius, in millimeters, of outer ring
or housing washerri x x cross-sectional raceway groove radius, in millimeters, of inner ring
or shaft washers x x radial(diametrical) operating clearance, in millimeters, of bearingyk x x distance, in millimeters, between center of lamina k and roller
centerZ x x number of rolling elementsα x x nominal contact angle, in degrees, of a bearingαj x operating contact angle, in degrees, of the rolling element jα0 x x initial contact angle, in degreesγ x x auxiliary parameterδ x total elastic deflection, in millimeters, of both contacts of a rolling
elementδj x elastic deflection, in millimeters, of the rolling element jδji x elastic deflection due to the inner ring contact, in millimeters, of
the rolling element jδje x elastic deflection due to the outer ring contact, in millimeters, of
the rolling element jδj,k x elastic deflection, in millimeters, of the lamina k of the roller jδa x relative axial displacement, in millimeters, of both bearing ringsδr x relative radial displacement, in millimeters, of both bearing ringsνE x x Poisson’s ratioρ x x curvature, in reciprocal millimeters, of the contact surface∑ρ x x curvature sum, in reciprocal millimeters
ϕj x angular position, in degrees, of rolling element jχ x x ratio of semi-major to semi-minor axis of the contact ellipseψ x relative angular displacement(total misalignment), in degrees, be-
tween inner raceway and outer raceway
2

ψj x relative angular displacement(total misalignment), in degrees, be-tween inner raceway and outer raceway in the plane of rollingelement j
2 Ball Bearings
2.1 General Description
To describe the kinematics of the inner- and outer-rings, we define a From marker Mi in thecenter of the outer ring and a To marker in the center of the inner ring. Both markers are lefthand ruled coordinates system. We assume that the Y axis of the From marker Mi is definedpointing to the direction of the unit axis direction ~ea of the outer ring. The direction ~ea is alsothe axial load direction (or axial displacement direction). The unit radial load direction, denotedby ~er, is also defined w.r.t. the From marker Mi. And the Y axis of the To marker Mj is definedpointing to the direction of the axis direction of the inner ring.
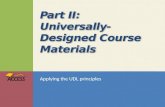
In the initial state, no load is applied to the bearing. Due to a diametrical clearance in the noload state, a nonzero initial contact angle α0 will occur. The formula for calculating this angleis
α0 = arccos [1− (s/2A)] (1)
and the angle is described in figure 1(a). After the load is applied, the contact angle will changefrom α0 to αj , which is given by equation (24) and described in figure 1(b).
When a ball is compressed by load Q, since the centers of curvature of the raceway groovesare fixed with respect to the corresponding raceways (that is because the contact happens onindividual points on the raceway grooves, the global curvatures and radii of the raceway groovesdo not change), the distance between the centers is increased by the amount of the normalapproach between the raceways [3]. From figure 1(b), it can be seen that
A′j = A+ δji + δje (2)
δj = A+ δji + δje −A = A′j −A, (3)
where all the symbols are given in Table 1.
2.2 Relative Displacement
After the load is applied, the relative displacement of the inner- and outer-ring may be defined [3]:
• δa: relative axial displacement of both bearing rings
• δr: relative radial displacement of both bearing rings
3

re
α0
(a) Ball–raceway contact before applying load.
δje
δji
A′j
αj
(b) Ball–raceway contact after load is applied.
Figure 1: Ball–raceway contact.
• ψ: relative angular displacement of both bearing rings
These relative displacement are shown in figure 2.
2.2.1 Relative Axial Displacement deltaa
The relative axial displacement, in millimeters, of both bearing rings, deltaa is state dependent.It is defined as:
δa = rMiMj · ~ea (4)
where ~ea is unit axis direction of the outer ring.
2.2.2 Radial Displacement δr
The radial displacement, δr, is state dependent, and can be calculated by projecting the dis-placement of two markers into radial load direction, ~er:
δr = rMiMj· ~er , (5)
where ~er is
~er =~ea × (rMiMj
× ~ea)‖~ea × (rMiMj
× ~ea)‖. (6)
4

ψZ
Y
Figure 2: Displacements of an inner ring (outer ring fixed) due to application of combined radial,axial, and moment loadings. [3]
If the ~ea is set to be parallel to Y axis of the From marker Mi, then δr can be obtained byjust setting the y component of the vector rMiMj
to be zero.
2.2.3 Relative Angular Displacement ψ
The relative angular displacement(total misalignment) ψ, in degrees, state dependent, is theangle through which the axis of the inner ring rotates w.r.t. the axis of the outer ring in they − z plane (around X axis)[2, 67], if we follows the orientation assumption in the begin of thisdocument. It is defined as
ψ = αMiMj, (7)
where αMiMj is the relative angle of two markers around X axis.
2.3 Contact Geometry
When two solids are pressed together by a force, the contact area is elliptical. To describe thiscontact area, two geometry definitions are needed: curvature sum
∑(ρ) and curvature difference
F (ρ). Their concepts are well explained in [2, p. 68]. Figure 3 shows the geometry of two contactsolids. For the inner contact and outer contact, as the curvatures are different, the constant
∑ρi,∑
ρe, Fi(ρ) and Fe(ρ) need to be calculated according to equation 8, 9, 10 and 11, respectively.
∑ρi =
2Dw
(2 +
γ
1− γ− Dw
2ri
)(8)
5

∑ρe =
2Dw
(2− γ
1 + γ− Dw
2re
)(9)
Fi(ρ) =(
γ
1− γ+Dw
2ri
)/(
2 +γ
1− γ− Dw
2ri
)(10)
Fe(ρ) =(−γ
1 + γ+Dw
2re
)/(
2− γ
1 + γ− Dw
2re
)(11)
where
• Dw is the nominal ball diameter, in millimeters;
• γ = Dw cosα/Dpw
– α is nominal contact angle, i.e. the contact angle of the load-free bearing. For deep-groove ball bearings having a nominal contact angle zero degree.
– Dpw is the pitch diameter in millimeters, of ball set.
• ri is the cross-sectional raceway groove radius, in millimeters, of the inner ring.
• re is the cross-sectional raceway groove radius, in millimeters, of the outer ring.
This contact area ellipse can be described by the ratio χ of the semi-major to semi-minor. Theratio χ depends only on the geometry of two contact solid. The ratio χi (or χe), of inner contact(or outer contact) is the root of equation (12). They are constant and need to be calculated onlyonce in the pre-prosseing.
1− 2χ2 − 1
[K(χ)
E(χ)− 1
]− F (ρ) = 0 (12)
• K(χ) is the complete elliptic integral of the first kind, defined by equation (3) in [1].
• E(χ) is the complete elliptic integral of the second kind, defined by equation (4) in [1].
• F (ρ) is calculated according equation (10) and equation (11).
Brewe and Hamrock [4], using a least squares method of linear regression, obtained simplifiedapproximations for χi, χe, K(χ) and E(χ) [2, p.127]. These equations are:
χ ≈ 1.0339(
Ry
Rx
)0.636
(13)
K ≈ 1.0003 +0.5968(
Ry
Rx
) (14)
6

r1x
r1y
r2y
r2x
2
Y
Y
X
X
Figure 3: Geometry of contact bodies.
E ≈ 1.5277 + 0.6023 ln(
Ry
Rx
)(15)
For 1 ≤ χ ≤ 10, the errors in the calculation of χ are less than 3%, errors on K are essentiallynil except at χ = 1 and vicinity where they are less than 2%, and errors on E are essentially nilexcept at χ = 1 and vicinity, where they are less than 2.6%. For the inner contact, the directionalequivalent radii Rix and Riy are defined by
1Rix
= ρxball + ρxinnerRing =2Dw
+2Dw
(γ
1− γ) =
2Dw
(1
1− γ), (16)
1Riy
= ρyball + ρyinnerRing =2Dw− 1ri
(17)
For the outer contact, the directional equivalent radii Rex and Rey are defined by
1Rex
= ρxball + ρxouterRing =2Dw− 2Dw
(γ
1 + γ) =
2Dw
(1
1 + γ), (18)
1Rey
= ρyball + ρyouterRing =2Dw− 1re
. (19)
In equation (16) and equation (18), we assume that the curvature is positive for convex surfacesand negative for concave surfaces.
7

2.4 Basic Formulas
2.4.1 The Spring Constant cP
After we obtain χi and χe, the spring constant cP can be calculated using:
cP = 1.48E
1− νe2
[K(χi) 3
√ ∑ρi
χi2E(χi)+K(χe) 3
√ ∑ρe
χe2E(χe)
]− 32
(20)
In equation (20),
• E and νe are modulus of elasticity and Poisson’s ratio, given in the input parameter list.
• The ratio χi and χe are constant, and are given by solving equation (12) or approximatedusing equation (13).
• K(χ) is constant, and is defined by equation (3) in [1] or approximated using equation (14).
• E(χ) is constant, and is defined by equation (4) in [1] or approximated using equation (15).
• The curvature sum∑ρi and
∑ρe are constant, and can be calculated according to equa-
tion (8) and equation (9).
2.4.2 Angular Position of rolling element j
Assuming the Y axis of the From marker is parallel to the axis direction, then the angularposition ϕj can be defined as
ϕj = ϕ1 +2πZ
(j − 1) j = 1, 2, ...Z (21a)
ϕ1 = 0.5 ∗mod (βMiMj, 2π) (21b)
where we assuming that the initial position of the first ball is on the Y axis of the To markerMj , and all the balls rotate in a speed, which is half of the inner ring rotation speed.
2.4.3 The total elastic deflection of rolling element j
The loci of raceway groove curvature radii centers in the initial state is shown in figure 4. Ifthe outer ring of the bearing is considered fixed in space as the load is applied to the bearing,then the inner ring will be displaced and the locus of inner-ring raceway groove radii centers willalso be displaced as shown in figure 5. From figure 5 it can be determined that A′j , the distancebetween the centers of curvature of the inner- and outer-ring raceway grooves at the positionwhere rolling element j locates, is given by
A′j =√
(A cosα0 + δr cosϕj)2 + (A sinα0 + δa +Ri sinψ cosϕj)2 , (22)
In equation (23),
8

• A, constant, is the distance, in millimeters, between raceway groove curvature centersof ball bearing having no clearance and having an initial contact angle, calculated usingA = ri + re −Dw. The concept is well explained in [2, 64]. See figure 1(a).
• α0, constant, is the initial contact angle, in degrees, α0 = arccos [1− (s/2A)]. See fig-ure 1(a).
• δr, state dependent, is the relative radial displacement of both bearing rings, calculatedusing equation (5).
• ϕj , state dependent, is the angular position of rolling element j, given in equation (21).
• δa, state dependent, given in equation (4).
• Ri is the distance, in millimeters, between the center of curvature of the inner race grooveand the axis of rotation. Ri = Dpw
2 +(ri − Dw
2
)cosα0.
• ψ, state dependent, is the relative angular displacement of both bearing rings given inequation (7).
The total elastic deflection of the rolling element j, δj , is given by
δj = max(0, A′j −A
). (23)
2.4.4 Operating Contact Angle of Rolling elementj
The operating contact angle of rolling element j, αj is
αj = arctan
(A sinα0 + δa +Ri sinψ cosϕj
A cosα0 + δr cosϕj
), (24)
where δa, ψ, ϕj , δr are state dependent, and calculated using equation (4), equation (7), equa-tion (21), equation (5).
2.5 Load Force
2.5.1 Radial Load Force
The formula of the radial load force is
Fr = cP
Z∑j=1
δ32j cosαj cosϕj~er. (25)
In equation (25),
• cP is constant w.r.t the type of bearing, and can be calculated using equation (20).
9

ϕj
y
xe
xi
zezi
Figure 4: Loci of raceway groove curvature radii centers before applying load. (From Jones, A.,Analysis of Stresses and Deflections, New Departure Engineering Data, Bristol, CT, 1946.)
A′j ϕj
YiY
XiX ′iXe
ψZ ′iZiZe
Figure 5: Loci of raceway groove curvature radii centers after displacement. (From Jones, A.,Analysis of Stresses and Deflections, New Departure Engineering Data, Bristol, CT, 1946.)
10

• Z is number of rolling elements, given in the input parameter list.
• δj , states dependent, is the elastic defection, in millimeters, of the rolling element j, andcan be calculated using equation (23)
• αj , states dependent, is the operating contact angle, in degrees, of the rolling element j,and can be calculated using equation (24)
• ϕj , states dependent, is the angular position, in degrees, of rolling element j, and can becalculated using equation (21)
• ~er, states dependent, is the unit direction vector of the radial displacement.
2.5.2 Axial Load Force
The formula of the axial load force is
Fa = cP
Z∑j=1
δ32j sinαj~ea. (26)
In equation (26), ~ea is the unit direction vector of the axial displacement, and all othercomponents are the same as described in section 2.5.1.
2.5.3 Load Moment
The load moment is in the unit of newton millimeter, and the formula is
MX =Dpw
2cP
Z∑j=1
δ32j sinαj cosϕj . (27)
The direction of the load moment is pointing to the X axis of the From marker Mi. In equa-tion (26), Dpw is the pitch diameter in millimeters of ball set and given by the parameter list.All other components are the same as described in section 2.5.1.
All the forces and moments applied on the outer ring are opposite to the load forces andmoment.
3 Roller Bearings
3.1 Lamina Model
To commence the analysis, it is assumed that any roller–raceway contact can be divided into(ns, ns ≥ 30) slices or laminae situated in planes parallel to the radial plane of the bearing. It is
11

also assumed that shear effects between these laminae can be neglected owing to the small magni-tudes of the contact deformations that develop. (Only contact deformations are considered.) [3,p.26].
For lamina k of roller j, the load qj,k is
qj,k = csδ109j,k (28)
where the spring constant of lamina, cs, for contacting parts made of steel
cs =35948L
89we
ns. (29)
3.2 The Elastic Deflection of the Lamina k of the Roller j
The elastic deflection, in millimeters, of the lamina k of the roller j may be considered to becomposed of three components:
• elastic deflection due to radial load at roller azimuth location j: δj ;
• displacement due to the profile depth: −2P (yk);
• deflection due to bearing misalignment (angular displacement).
3.2.1 Elastic Deflection due to Radial Load: δj
For a radial displacement δr, of the inner ring, the elastic deflection of the rolling element j, δjis
δj = δr cosϕj −s
2(30)
where δr and ϕj are state dependent, and s, constant, is the radial operating clearance of bearing.
3.2.2 Profile Function: P (x)
The profile function depends on the expertise of the manufacturer. Some standard profile func-tions for different types of rollers are given in [1, p.12,17,18].
3.2.3 Deflection due to Bearing Misalignment
The bearing misalignment angle (angular displacement) ψ is described in figure 6. The angle ψis positive when rotates clockwise. In figure 7, yk is the distance between center of lamina k androller center. The red dot in figure 7 denotes the original point of yk. Then the deflection dueto bearing misalignment is (−yk tanψj), where
ψj = arctan (tanψ cosϕj) (31)
12

ψ
ψ
ye
+
−
yi
Figure 6: Misalignment of cylindrical roller bearing rings. [3]
X
X
Yyk
Original point ofyk
Z
Figure 7: Misaligned roller bearing. [3]
13

In summation, the elastic deflection of the lamina k of the roller j is
δj,k = max(0, δj − yk tanψj − 2P (yk)) (32)
where δj and ψj are state dependent.
3.3 Load Force
Fr = cs
Z∑j=1
(cosϕj
ns∑k=1
δ109j,k
)~er . (33)
where cs, Z and ns are constant, and all other components are state dependent.
MX = cs
Z∑j=1
(cosϕj
ns∑k=1
yk δ109j,k
), (34)
where cs, Z, ns and yk are constant, and all other components are state dependent.
The direction of the load moment is pointing to the X axis of the From marker Mi.
All the forces and moments applied on the outer ring are opposite to the load forces andmoment.
4 Reference Geometries
4.1 Pitch Diameter Dpw
The pitch diameter Dpw is usually approximately equal to the mean of the bore diameter d andthe outer diameter of the outer ring D, or to the mean of the inner- and outer-ring racewaycontact diameter. Therefore,
Dpw ≈12
(d+D) (35)
Dpw ≈12
(di + de). (36)
In most cases, d and D are provided by the manufacturer. If the value of di and de can also beobtained from the manufacturer, equation (36) is preferred to be used to approximate the pitchdiameter since it is more precise.
4.2 Point Contact Bearing
For the point contact bearings:
14

• deep groove ball bearings, angular contact ball bearings and separable ball bearings,
• spherical roller bearings,
• self-aligning ball bearings,
• thrust ball bearings and thrust angular contact ball bearings,
• thrust spherical roller bearings,
the calculation method are similar to that present in section 2.
In this case, the spring constant cP is calculate via equation (20), and then the cross-sectionalraceway groove radii of inner- and outer-ring, ri and re, are two important constant values forthe calculation. Usually, ri and re are dependent on the diameter of the rolling element. Twoconformity values are used for defining the radii:
ri = fiDw (37)re = feDw, (38)
where fi and fe are the inner- and outer-race conformity.
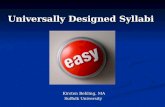
4.2.1 Deep Groove Ball Bearings
Figure 8: The geometry of deep groove ball bearings. [5]
The nominal contact angle, α, of deep groove ball bearings is 0◦. The input parameters are
• (d, D, E, Z, νe, Dw),
• s, α = 0◦, fe = 0.53 and fi = 0.52,
where the parameters inside the bracket are the common parameters needed for every type ofbearings. The conformities fe and fi are better to be set as input parameters with default
15

values, instead of internal values. Because different standards have suggested slightly somedifferent values. And the initial contact angle α0 can be calculated using equation (1).
The bearing diameter clearance s can be given according ISO 5753, 2009 or from the man-ufacturer.
4.2.2 Angular Contact Ball Bearings
Figure 9: The geometry of angular contact ball bearings. [5]
Angular contact ball bearings are specifically designed to operate under thrust loads, and theclearance built into the unloaded bearing along with the raceway groove curvatures determinesthe bearing initial (free) contact angle [3, p.63]. That is the initial contact angle of angular contactball bearings is equal to the nominal contact angle: α0 = α, and should not be calculated usingequation (1). Thus, the diametrical clearance s is not needed.
The input parameters are
• (d, D, E, Z, νe, Dw),
• α, fe = 0.53 and fi = 0.52.
And the standard nominal contact angle α0 are 15◦, 25◦ and 40◦ [5, p.11].
4.2.3 Spherical Roller Bearings (radial)
In figure 10, Dw is the maximal roller diameter. For the radial spherical roller bearings, theroller diameter at the contact point, Dwe, is equal to Dw:
Dwe = Dw . (39)
16

Figure 10: The geometry of spherical roller bearings. [5]
For the axial spherical roller bearings, Dwe 6= Dw. Then in this case, Dwe should be deter-mined according the contact angle and other geometry constraints, but this is not included in[1].
The input parameter for spherical roller bearings (radial) are
• (d, D, E, Z, νe, Dw),
• α and fp = 0.97.
The inner- and outer-race conformities are not input parameters, since for this type, re and riare calculated using
re =Dpw
2 cosα+Dwe
2(40)
ri = re . (41)
For spherical roller bearings, in order to avoid edge stress, rollers may be crowned as shownin figure 10. The stress distribution is thereby made more uniform depending on the appliedload [2, p.144]. The conformity of roller crown radius, fp, is needed for defining the rollers:
Rp = fpre . (42)
Then the equations for calculating curvature sum and relative curvature difference, 8, 9, 10and 11, should be updated by replacing the radius in plane Y from 0.5Dwe to Rp:∑
ρi =2
Dwe
(1
1− γ
)+
1Rp− 1ri
(43)
17

∑ρe =
2Dwe
(1
1 + γ
)+
1Rp− 1re
(44)
Fi(ρ) =2
Dwe
(1
1−γ
)− 1
Rp+ 1
ri
2Dwe
(1
1−γ
)+ 1
Rp− 1
ri
(45)
Fe(ρ) =2
Dwe
(1
1+γ
)− 1
Rp+ 1
re
2Dwe
(1
1+γ
)+ 1
Rp− 1
re
(46)
where γ = Dwe cosα/Dpw and α is the nominal contact angle, i.e. the contact angle of theload-free bearing.
4.2.4 Self-aligning Ball Bearings(single row)
Figure 11: The geometry of self-aligning ball bearings. [5]
The input parameters for self-aligning ball bearings(single row) are
• (d, D, E, Z, νe, Dw),
• α = 0◦, fi = 0.53.
The outer-race conformity is not input parameter, since for this type, re is calculated using
re = 0.5(
1 +1γ
)Dw . (47)
18

4.2.5 Thrust Ball Bearings
Figure 12: The geometry of thrust ball bearings. [5]
The input parameters are
• (d, D, E, Z, νe, Dw),
• s, α = 90◦, fe = 0.54 and fi = 0.54.
4.2.6 Thrust Angular Contact Ball Bearings
The description of geometry for thrust angular contact bearings is the same as for angular contactball bearings. The only difference in geometry is a value of 0.54 for the conformity, instead ofthe 0.52 and 0.53 used for angular contact ball bearings.
The input parameters are
• (d, D, E, Z, νe, Dw),
• s, α, fe = 0.54 and fi = 0.54.
Standard thrust angular contact ball bearings have a contact angle of 60◦.
4.3 Line Contact Bearing
For the line contact bearings:
19

Figure 13: The geometry of thrust angular contact ball bearings. [5]
• cylindrical roller bearings and needle roller bearings, α = 0◦
• tapered roller bearings,
• thrust cylindrical roller bearings and thrust needle roller bearings, α = 90◦
• thrust tapered roller bearings,
the calculation method are similar to that present in section 3.
In this case, the spring constant cs, given in equation (29), is not calculate pure theoretically,but also base on laboratory testing. But different crown profile functions are applied for eachtype. For the detail formulas, please refer to [1, p.17].
The input parameters are
• (d, D, E, Z, νe, Dw),
• s, α, Lwe, ns ≥ 30, P (x).
In addition to the parameters used for ball bearings, the effective length of the roller Lwe is arequired input parameter. The effective length is a little smaller than the length of the rollerbecause of radii at the end of the roller. The roller diameter at contact point, Dwe should bedetermined from the geometry and kinematic constraints. The number of laminae ns should beat lest 30.
20

4.3.1 Cylindrical Roller Bearings and Needle Roller Bearings
Cylindrical roller bearings and needle roller bearings are similar, their nominal contact angleα = 0◦. In figure 14(a) and figure 14(b), Dw is the (maximal) roller diameter and equals to theroller diameter at contact point Dwe. The standard profile functions, P (x), for these two typesof bearings are defined by (eq.42 44) in [1], replacing xk by yk.
(a) The geometry of cylindrical roller bearings.(b) The geometry of needle roller bearings.
4.3.2 Tapered Roller Bearings
Figure 14: The geometry of tapered roller bearings. [5]
21

Tapered roller bearings use a conical roller instead of a cylindrical roller. The input rollerdiameter, Dw, is given for the middle of the roller and also the pitch diameter Dpw is definedfor the middle of the rollers. The force is assumed to be at the medium height of the inner ringrim.[5, p.18] So the roller diameter at contact point, Dwe is equal to Dw. The standard profilefunctions, P (x), is defined by (eq. 77) in [1], replacing xk by yk.
4.3.3 Thrust Cylindrical Roller Bearings and Thrust Needle Roller Bearings
Figure 15: The geometry of thrust cylindrical roller bearings. [5]
Axial cylindrical roller bearings have a nominal contact angle of 90◦. They only allow axialforces and bending moments. No radial forces can be applied. The clearance s in this caserepresents the axial clearance.
4.3.4 Thrust Tapered Roller Bearings
The standard profile functions, P (x), is defined by (eq. 85) in [1], replacing xk by yk.
References
[1] ISO/TS 16281, Rolling bearings — Methods for calculating the modified reference rating lifefor universally loaded bearings. International Organization for Standardization: Switzerland,First Edition, 2008.
[2] Harris, T.A. and Kotzalas, M.N., Essential Concepts of Bearing Technology. Taylor & Francis,Fifth Edition, 2006.
22

[3] Tedric A. Harris, Michael N. Kotzalas, Advanced Concepts of Bearing Technology,: RollingBearing Analysis. CRC Press, Fifth Edition, 2006.
[4] Brewe, D. and Hamrock, B., Simplified solution for elliptical-contact deformation betweentwo elastic solids. ASME Trans. J. Lub. Tech., 101(2), 231–239, 1977.
[5] MESYS AG, MESYS Rolling Bearing Calculation. 2014.
23