Formulario antisismica maverick
8
FORMULAS DE INTEGRALES I . IDEALIZACIÓN MATEMÁTICA Modelo real Integración por partes II . PROCEDIMIENTO DE ANÁLISIS DINÁMICO II.1. FORMULACIÓN DE LA EDM Las incognitas son los GDL din - Existen 03 metodos para la formulación de la EDM A. METODO GENERACIÓN DIRECTASe realiza un equilibrio Dinámico Se formula la EDM transformando el prob. Din. en un prob. Tipo statico, para el cual se usa el SOLUCIÓN DE ECUACIONES DIFERENCIALE DE 2do ORDEN principio de Alambert SIST. LIBRE SIN AMORT. B. METODO TRABAJO VIRTUAL Consiste en aplicar el principio de trabajo virtual generado por un desplazamiento virtual en dirección de la configuración x : Desplazamiento real deformada. dv : Desplazamiento virtual C. PRINCIPIO DE HAMILTON SIST. LIBRE CON AMORT. Genera la EDM en base a una ecu. Definida, por lo que es necesario definir los tipos de fzas que pueden se conservativas o no conservativas Fza conservativa: cuando actua tratando que la estructura recupere su forma inicial. (fza restitutiva) Fza no conservativa: cuando se encarga de generar una deformación permanente en la estructura Fza que disipa energía (fza de amortiguamiento) II.2. SOLUCIÓN DELA EDM Consiste en det. inicialmente la Rpta dinamica a nivel de los desplazamientos En Ing. Civil ζ < 1 Э vibración ζ < 20% A. METODO PASO A PASO La solución se da por un proceso iterativo aplicando la teoria de diferencias finitas Solución imaginaria Generalmente se usa en un analisis sismico no lineal. Reemplazar en EDM B. METODOD DEL DESACOPLAMIEN Transforma un sistema de m gdl a m problemas de 1 gdl y se resuelve por matric La respuesta dinamica se puede deteminar en función del tiempo (t) ola frecuen Pag - 16 Rta Din x Tiempo x Frecuencia ∫ Duhamel Fourier Metodo Pag - 01 UNASAM ING. CIVIL INGENIERÍA ANTISÍSMICA Es llevar el modelo real a uno matematico para ello existen 03 metodos. Por: Maverick Aguirre Jara Por: Maverick Aguirre Jara MODELO DE MASA DISTRIBUIDA MMD MODELO DE ELEMTOS FINITOS MEF MODELO DE MASA CONCENTRADA MMC FORMULAS DE DERIVADAS IDENTIDADES TRIGONOMÉTRICAS A y B dependen de las condiciones iniciales SOLUCIÓN GENERAL X (H) SOLUCIÓN GENERAL X (P) Sol. Fundamt Raices Reales Raices Iguales Sol. Fundamt Raices Imaginarias Sol. Fundamt Raices Imaginarias Sol. Fundamt Fza externa Fza efectiva Fza de inercia FORMULARIO DE INGENIERÍA ANTISÍSMICA Por Maverick Aguirre = − = 2 = 2 − 2 4 2 = 2 + 2 4 = = ; > 0, ≠ 0 = − ( ) ′ = ′ (. ) ′ = ′ . +. ′ ´ = ′ ′ = ′ ′ =− ′ ′ = ′ ± = ∗ ± ∗ ± = ∗ ∓ ∗ + = 2 + 2 − 2 2 + 2 =1 2 = 2 ∗ 2 = 2 − 2 2 = 1 − 2 2 2 = 1− 2 2 = 1 2 1 − 2 + 2 = 0 () : 2 + 2 = 0 1 = 2 = () = . + . + 2 + 2 = 0 () : 2 +2 + 2 = 0 1,2 =− ± 2 − 1 1,2 =− ± 1 − 2 = 1 − 2 1,2 =− ± 1,2 ∶ 1 =− + − 2 =− − − () = − + − =0; () () 2 + + = 0 1,2 = − ± 2 − 4 2 1 = 2 =− − 1 = 2 =− 1 = + 2 =− − − 1 = 2 = 2 + + = () Si () = () = ; () =; () =0 F ma = − = 0 + =0 = 0 − = : − : :
-
Upload
ysai-villanueva-gamarra -
Category
Automotive
-
view
181 -
download
30
Transcript of Formulario antisismica maverick
FORMULAS DE INTEGRALES
I . IDEALIZACIÓN MATEMÁTICA
Modelo real
Integración por partes
II . PROCEDIMIENTO DE ANÁLISIS DINÁMICO
II.1. FORMULACIÓN DE LA EDM Las incognitas son los GDL din - Existen 03 metodos para la formulación de la EDM
A. METODO GENERACIÓN DIRECTASe realiza un equilibrio Dinámico
Se formula la EDM transformando el prob. Din. en un prob. Tipo statico, para el cual se usa el
SOLUCIÓN DE ECUACIONES DIFERENCIALE DE 2do ORDEN principio de Alambert
SIST. LIBRE SIN AMORT.
B. METODO TRABAJO VIRTUAL
Consiste en aplicar el principio de trabajovirtual generado por un desplazamientovirtual en dirección de la configuración x : Desplazamiento real
deformada. dv : Desplazamiento virtual
C. PRINCIPIO DE HAMILTON
SIST. LIBRE CON AMORT.
Genera la EDM en base a una ecu. Definida, por lo que es necesario definir los tipos de fzas que pueden ser:conservativas o no conservativasFza conservativa: cuando actua tratando que la estructura recupere su forma inicial. (fza restitutiva)Fza no conservativa: cuando se encarga de generar una deformación permanente en la estructura
Fza que disipa energía (fza de amortiguamiento) II.2. SOLUCIÓN DELA EDM Consiste en det. inicialmente la Rpta dinamica a nivel de los desplazamientos
En Ing. Civil ζ < 1 Э vibración ζ < 20%
A. METODO PASO A PASO La solución se da por un proceso iterativo aplicando la teoria de diferencias finitasSolución imaginaria Generalmente se usa en un analisis sismico no lineal.
Reemplazar en EDM B. METODOD DEL DESACOPLAMIENTOTransforma un sistema de m gdl a m problemas de 1 gdl y se resuelve por matrices
La respuesta dinamica se puede deteminar en función del tiempo (t) ola frecuencia (f)
Pag - 16
Rta Din
x Tiempo
x Frecuencia
∫ Duhamel
Fourier
Metodo
Pag - 01
UNASAM ING. CIVILINGENIERÍA ANTISÍSMICA
Es llevar el modelo real a uno matematico para ello existen 03 metodos.
Por: Maverick Aguirre Jara
Por: Maverick Aguirre Jara
MODELO DE MASA DISTRIBUIDA MMDMODELO DE ELEMTOS FINITOS MEFMODELO DE MASA CONCENTRADA MMC
FORMULAS DE DERIVADAS
IDENTIDADES TRIGONOMÉTRICAS
A y B dependen de las condiciones iniciales
SOLUCIÓN GENERAL X (H) SOLUCIÓN GENERAL X (P)
Sol. FundamtRaices Reales
Raices Iguales Sol. Fundamt
Raices Imaginarias Sol. Fundamt
Raices Imaginarias Sol. Fundamt
Fza externa
Fza efectiva
Fza de inercia
FORMULARIO DE INGENIERÍA ANTISÍSMICA Por Maverick Aguirre
𝑆𝑒𝑛𝑥𝑑𝑥 = −𝐶𝑜𝑠𝑥
𝐶𝑜𝑠𝑥𝑑𝑥 = 𝑆𝑒𝑛𝑥
𝑆𝑒𝑛2𝑥𝑑𝑥 =𝑥
2−𝑆𝑒𝑛2𝑥
4
𝐶𝑜𝑠2𝑥𝑑𝑥 =𝑥
2+𝑆𝑒𝑛2𝑥
4
𝑒𝑥𝑑𝑥 = 𝑒𝑥
𝑎𝑥𝑑𝑥 =𝑎𝑥
𝑙𝑛𝑎; 𝑎 > 0, 𝑎 ≠ 0
𝑈𝑑𝑉 = 𝑈𝑉 − 𝑉𝑑𝑈
(𝑒𝑢)′= 𝑒𝑢𝑢′
(𝑢. 𝑣)′= 𝑢′. 𝑣 + 𝑢. 𝑣′
𝑙𝑛𝑢´ =𝑢′
𝑢
𝑆𝑒𝑛𝑢′ = 𝑢′𝐶𝑜𝑠𝑢
𝐶𝑜𝑠𝑢′ = −𝑢′𝑆𝑒𝑛𝑢
𝐿𝑜𝑔𝑎𝑢′ =𝑢′
𝑢𝐿𝑜𝑔𝑎𝑢
𝑆𝑒𝑛 𝐴 ± 𝐵 = 𝑆𝑒𝑛𝐴 ∗ 𝐶𝑜𝑠𝐵± 𝐶𝑜𝑠𝐴 ∗ 𝑆𝑒𝑛𝐵
𝐶𝑜𝑠 𝐴 ± 𝐵 = 𝐶𝑜𝑠𝐴 ∗ 𝐶𝑜𝑠𝐵 ∓ 𝑆𝑒𝑛𝐴 ∗ 𝑆𝑒𝑛𝐵
𝐶𝑜𝑠𝐴 + 𝑆𝑒𝑛𝐵 = 2𝑆𝑒𝑛𝐴 + 𝐵
2𝐶𝑜𝑠
𝐴 − 𝐵2
𝑆𝑒𝑛2𝐴 + 𝐶𝑜𝑠2𝐵=1
𝑆𝑒𝑛2𝐴 = 2𝑆𝑒𝑛𝐴 ∗ 𝐶𝑜𝑠𝐴
𝐶𝑜𝑠2𝐴 = 𝐶𝑜𝑠2𝐴 − 𝑆𝑒𝑛2𝐴
𝐶𝑜𝑠2𝐴 = 1 − 2𝑆𝑒𝑛2𝐴
𝑆𝑒𝑛𝐴
2=
1 − 𝐶𝑜𝑠𝐴
2
𝑆𝑒𝑛2𝐴 =1
21 − 𝐶𝑜𝑠2𝐴
𝑥 + 𝜔2𝑥 = 0
𝑋(𝐻): 𝜆2 +𝜔2 = 0
𝑟1 = 𝜔𝑖 𝐶𝑜𝑠𝜔𝑡
𝑟2 = 𝜔𝑖 𝑆𝑒𝑛𝜔𝑡
𝑋(𝑡) = 𝐴. 𝐶𝑜𝑠𝜔𝑡 + 𝐵. 𝑆𝑒𝑛𝜔𝑡
𝑥 + 2𝜁𝜔 𝑥 + 𝜔2𝑥 = 0
𝑋(𝐻): 𝜆2 + 2𝜁𝜔𝜆 + 𝜔2 = 0
𝑟1,2 = −𝜁𝜔 ± 𝜔 𝜁2 − 1
𝑟1,2 = −𝜁𝜔 ± 𝜔 1 − 𝜁2𝑖
𝜔𝐷 = 𝜔 1 − 𝜁2𝑖
𝑟1,2 = −𝜁𝜔 ± 𝜔𝐷𝑖
𝑟1,2 ∶
𝑟1 = −𝜁𝜔 +𝜔𝐷𝑖 𝑒−𝜁𝜔𝑡𝐶𝑜𝑠𝜔𝐷𝑡
𝑟2 = −𝜁𝜔 −𝜔𝐷𝑖 𝑒−𝜁𝜔𝑡𝑆𝑒𝑛𝜔𝐷𝑡
𝑋(𝐻) = 𝐴𝑒−𝜁𝜔𝑡𝐶𝑜𝑠𝜔𝐷𝑡 + 𝐵𝑒−𝜁𝜔𝑡𝑆𝑒𝑛𝜔𝐷𝑡𝑡 = 0 ;
𝑥(𝑜) 𝑥(𝑜)
𝐴𝑥2 + 𝐵𝑥 + 𝐶 = 0
𝑟1,2 =−𝐵 ± 𝐵2 − 4𝐴𝐶
2𝐴
𝑟1 = 𝑎 𝑒𝑎𝑡
𝑟2 = −𝑏 𝑒−𝑏𝑡
𝑟1 = 𝑎𝑖 𝐶𝑜𝑠 𝑎𝑡𝑟2 = −𝑏𝑖 𝑆𝑒𝑛 𝑏𝑡
𝑟1 = 𝑎 + 𝑏𝑖 𝑒𝑎𝑡𝐶𝑜𝑠 𝑏𝑡𝑟2 = −𝑐 − 𝑑𝑖 𝑒−𝑐𝑡𝑆𝑒𝑛 𝑑𝑡
𝑟1 = 𝑎 𝑒𝑎𝑡
𝑟2 = 𝑎 𝑡𝑒𝑎𝑡
𝐴𝑥2 + 𝐵𝑥 + 𝐶 = 𝑃(𝑡)
Si 𝑃(𝑡) = 𝑎𝑥
𝑋(𝑃) = 𝐴𝑥 ; 𝑋(𝑃) = 𝐴 ; 𝑋(𝑃) = 0
F ma
𝐹 = 𝑚𝑎 𝐹 − 𝑚𝑎 = 0 𝐹 + 𝐹𝐼 = 0 𝐹𝑥 = 0−𝑚𝑎 = 𝐹𝐼
𝑚𝑎 :
−𝑚𝑎 :
𝐹 :
1. SISTEMAS LIBRES
1.1. SIST. LIBRES SIN AMORTIGUAMIENTOLa Solucion es X(t) = XH
Solución de la EDM
1.2. SIST. LIBRES CON AMORTIGUAMIENTOLa Solucion es X(t) = XH
1. Determinar Ecmax
2. Determinar EpmaxCoeficiente de Amortiguamiento
3. Consevación de energia Ecmax = Epmax
ECU. DEFLEXIÓN ESTATICA
Equivale a la elastica generada por su peso propio
Pag - 02 Pag - 15
SISTEMAS DISCRETOS
DEFLEXION ESTATICA
Por: Maverick Aguirre Jara Por: Maverick Aguirre Jara
CAPITULO II DET. DE LA RTA. DINÁMICA PARA SIST. DE 1 GDLdinámico RAYLEIGH CASO PARTICULAR
𝑚 𝑥 + 𝑘𝑥 = 0
𝑥 + 𝜔2𝑥 = 0
𝑚 𝑥 + 𝑐 𝑥 + 𝑘𝑥 = 0
𝑥 + 2𝜁𝜔 𝑥 + 𝜔2𝑥 = 0
𝑋(𝑡) = 𝑋(𝑜)𝑐𝑜𝑠𝜔𝑡 + 𝑋(𝑜)
𝜔𝑠𝑒𝑛𝜔𝑡
𝑋(𝑡) = −𝜁𝜔𝑡 𝑋(𝑜)𝑐𝑜𝑠𝜔𝐷𝑡 + 𝑋 𝑜 + 𝜔𝑋(𝑜)
𝜔𝐷𝑠𝑒𝑛𝜔𝐷𝑡
𝜃 = 𝑎𝑟𝑐𝑡𝑔 𝑋(𝑜)
𝜔𝑋(𝑜)𝜌 = 𝑋(𝑜)
2 + 𝑋(𝑜)
𝜔
2
𝑋(𝑡) = 𝜌cos(𝜔𝑡 − 𝜃)𝑋(𝑚𝑎𝑥) = 𝜌
𝜔𝐷 = 𝜔 1− 𝜁2
𝜃 = 𝑎𝑟𝑐𝑡𝑔 𝑋(𝑜) − 𝜁𝜔𝑋(𝑜)
𝜔𝐷𝑋(𝑜)𝜌 = 𝑋(𝑜)
2 + 𝑋 𝑜 − 𝜁𝜔𝑋(𝑜)
𝜔𝐷
2
𝑋(𝑡) = −𝜁𝜔𝑡𝜌𝑐𝑜𝑠(𝜔𝐷𝑡 − 𝜃)
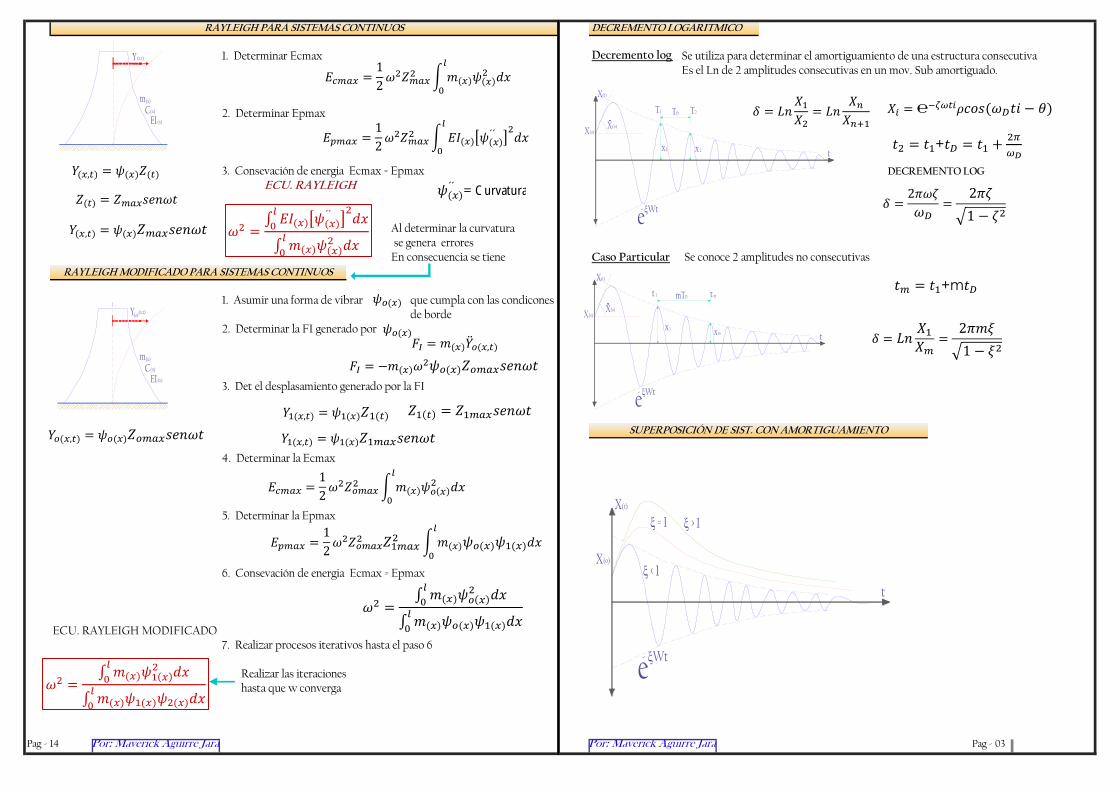
𝑌𝑑(𝑥,𝑡) = 𝜓(𝑥)𝑍𝑚𝑎𝑥𝑠𝑒𝑛𝜔𝑡
𝐸𝑐𝑚𝑎𝑥 =1
2𝜔2𝑍𝑚𝑎𝑥
2 0
𝑙
𝑚(𝑥)𝜓 𝑥2 𝑑𝑥
𝐸𝑝𝑚𝑎𝑥 =1
2𝑍𝑚𝑎𝑥 𝑔
0
𝑙
𝑚(𝑥)𝜓(𝑥)𝑑𝑥
𝜔2 =𝑔
0
𝑙𝑚(𝑥)𝜓(𝑥)𝑑𝑥
𝑍𝑚𝑎𝑥 0𝑙𝑚(𝑥)𝜓 𝑥
2 𝑑𝑥
𝑌𝑑 𝑥 𝑚𝑎𝑥 = 𝜓(𝑥)𝑍𝑚𝑎𝑥
𝜓(𝑥)
𝜔2 =𝑔
0
𝑙𝑚(𝑥)𝑌𝑑(𝑥)𝑑𝑥
0𝑙𝑚(𝑥)𝑌𝑑 𝑥
2 𝑑𝑥
𝜔2 =𝐾∗
𝑚∗ = 𝐾𝑖Δ𝜓𝑖
2
𝑚𝑖𝜓𝑖2
𝜁 =𝐶
𝐶𝑐𝑟
𝐶𝑐𝑟 = 2𝑚𝜔
𝐶 = 2𝑚𝜔𝜁
𝜁 ∶
1. Determinar Ecmax Decremento log (δ) Se utiliza para determinar el amortiguamiento de una estructura consecutiva Es el Ln de 2 amplitudes consecutivas en un mov. Sub amortiguado.
2. Determinar Epmax
3. Consevación de energia Ecmax = Epmax DECREMENTO LOG
ECU. RAYLEIGH
Al determinar la curvatura se genera erroresEn consecuencia se tiene Caso Particular Se conoce 2 amplitudes no consecutivas
1. Asumir una forma de vibrar que cumpla con las condiconesde borde
2. Determinar la FI generado por
3. Det el desplasamiento generado por la FI
4. Determinar la Ecmax
5. Determinar la Epmax
6. Consevación de energia Ecmax = Epmax
ECU. RAYLEIGH MODIFICADO7. Realizar procesos iterativos hasta el paso 6
Realizar las iteracioneshasta que w converga
Pag - 14 Pag - 03
RAYLEIGH MODIFICADO PARA SISTEMAS CONTINUOS
SUPERPOSICIÓN DE SIST. CON AMORTIGUAMIENTO
DECREMENTO LOGARITMICORAYLEIGH PARA SISTEMAS CONTINUOS
Por: Maverick Aguirre Jara Por: Maverick Aguirre Jara
𝑌(𝑥,𝑡) = 𝜓(𝑥)𝑍(𝑡)
𝑍(𝑡) = 𝑍𝑚𝑎𝑥𝑠𝑒𝑛𝜔𝑡
𝑌(𝑥,𝑡) = 𝜓(𝑥)𝑍𝑚𝑎𝑥𝑠𝑒𝑛𝜔𝑡
𝐸𝑐𝑚𝑎𝑥 =1
2𝜔2𝑍𝑚𝑎𝑥
2 0
𝑙
𝑚(𝑥)𝜓 𝑥2 𝑑𝑥
𝐸𝑝𝑚𝑎𝑥 =1
2𝜔2𝑍𝑚𝑎𝑥
2 0
𝑙
𝐸𝐼(𝑥) 𝜓(𝑥)´´ 2
𝑑𝑥
𝜔2 = 0
𝑙𝐸𝐼(𝑥) 𝜓(𝑥)
´´ 2𝑑𝑥
0𝑙𝑚(𝑥)𝜓 𝑥
2 𝑑𝑥
𝜓(𝑥)´´ = Curvatura
𝑌𝑜(𝑥,𝑡) = 𝜓𝑜(𝑥)𝑍𝑜𝑚𝑎𝑥𝑠𝑒𝑛𝜔𝑡
𝜓𝑜(𝑥)
𝜓𝑜(𝑥)𝐹𝐼 = 𝑚(𝑥)
𝑌𝑜(𝑥,𝑡)
𝐹𝐼 = −𝑚(𝑥)𝜔2𝜓𝑜(𝑥)𝑍𝑜𝑚𝑎𝑥𝑠𝑒𝑛𝜔𝑡
𝐸𝑐𝑚𝑎𝑥 =1
2𝜔2𝑍𝑜𝑚𝑎𝑥
2 0
𝑙
𝑚(𝑥)𝜓𝑜 𝑥2 𝑑𝑥
𝐸𝑝𝑚𝑎𝑥 =1
2𝜔2𝑍𝑜𝑚𝑎𝑥
2 𝑍1𝑚𝑎𝑥2
0
𝑙
𝑚(𝑥)𝜓𝑜(𝑥)𝜓1(𝑥)𝑑𝑥
𝑌1(𝑥,𝑡) = 𝜓1(𝑥)𝑍1(𝑡) 𝑍1 𝑡 = 𝑍1𝑚𝑎𝑥𝑠𝑒𝑛𝜔𝑡
𝑌1(𝑥,𝑡) = 𝜓1(𝑥)𝑍1𝑚𝑎𝑥𝑠𝑒𝑛𝜔𝑡
𝜔2 = 0𝑙𝑚(𝑥)𝜓𝑜 𝑥
2 𝑑𝑥
0
𝑙𝑚(𝑥)𝜓𝑜(𝑥)𝜓1(𝑥)𝑑𝑥
𝜔2 = 0
𝑙𝑚(𝑥)𝜓1 𝑥
2 𝑑𝑥
0𝑙𝑚(𝑥)𝜓1(𝑥)𝜓2(𝑥)𝑑𝑥
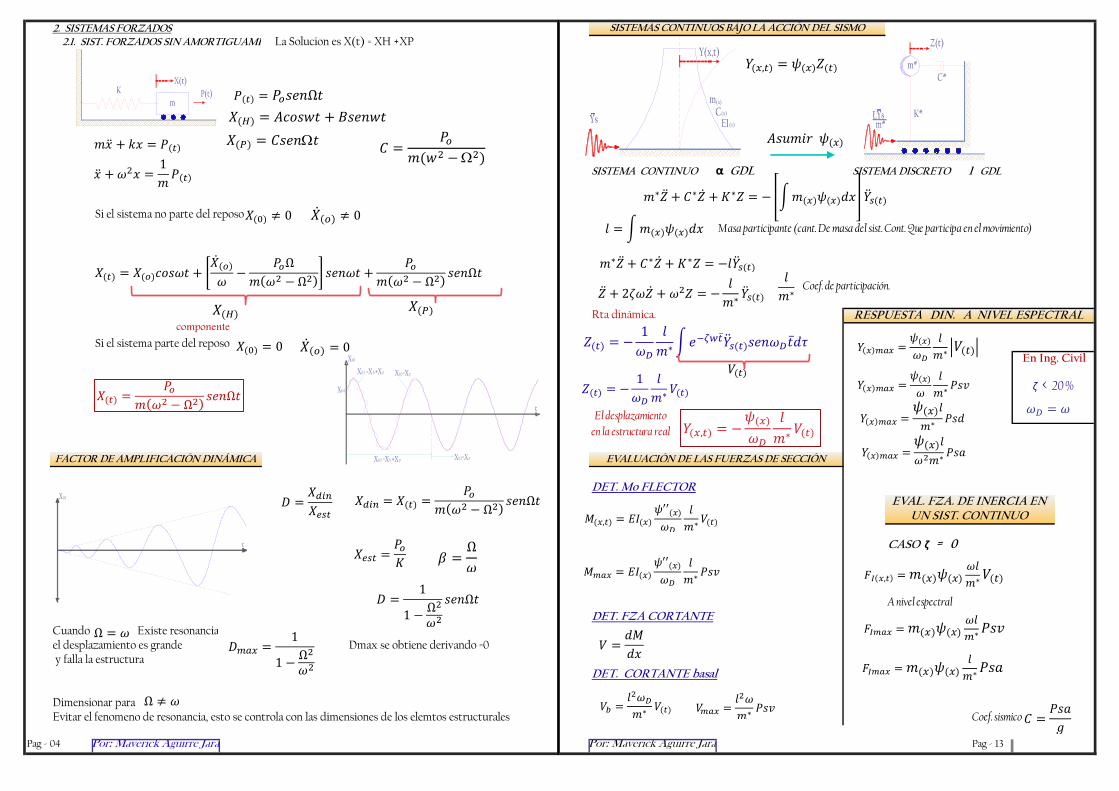
𝛿 = 𝐿𝑛𝑋1𝑋2
= 𝐿𝑛𝑋𝑛𝑋𝑛+1
𝑋𝑖 = −𝜁𝜔𝑡𝑖𝜌𝑐𝑜𝑠(𝜔𝐷𝑡𝑖 − 𝜃)
𝑡2 = 𝑡1+𝑡𝐷 = 𝑡1 +2𝜋
𝜔𝐷
𝛿 =2𝜋𝜔𝜁
𝜔𝐷=
2𝜋𝜁
1 − 𝜁2
𝑡𝑚 = 𝑡1+m𝑡𝐷
𝛿 = 𝐿𝑛𝑋1𝑋𝑚
=2𝜋𝑚𝜉
1 − 𝜉2
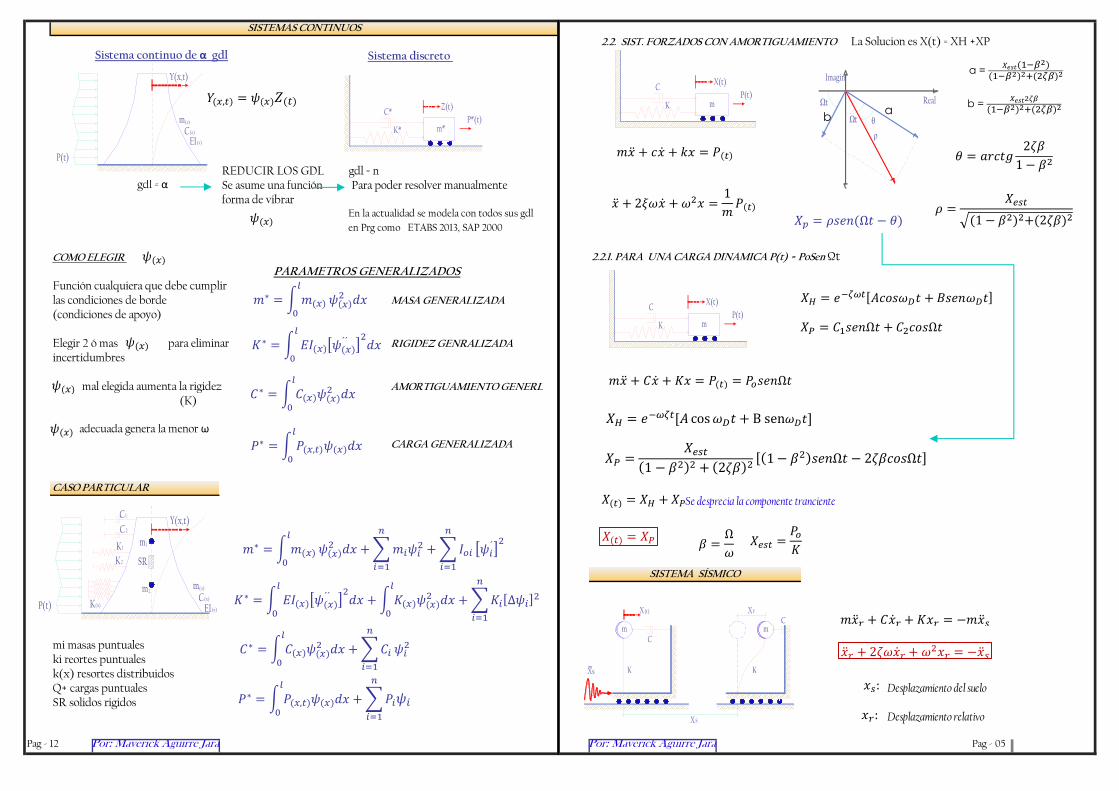
2. SISTEMAS FORZADOS 2.1. SIST. FORZADOS SIN AMORTIGUAMIENTO La Solucion es X(t) = XH +XP
Si el sistema no parte del reposoMasa participante (cant. De masa del sist. Cont. Que participa en el movimiento)
Coef. de participación.
Rta dinámica.
Si el sistema parte del reposo
DET. Mo FLECTOR
CASO ζ = 0
A nivel espectralDET. FZA CORTANTE
Cuando Existe resonanciael desplazamiento es grande Dmax se obtiene derivando =0 y falla la estructura
DET. CORTANTE basal
Dimensionar paraEvitar el fenomeno de resonancia, esto se controla con las dimensiones de los elemtos estructurales Coef. sismico
Pag - 04 Pag - 13
RESPUESTA DIN. A NIVEL ESPECTRAL
EVALUACIÓN DE LAS FUERZAS DE SECCIÓN
SISTEMAS CONTINUOS BAJO LA ACCIÓN DEL SISMO
ζ < 20 %
SISTEMA CONTINUO α GDL SISTEMA DISCRETO 1 GDL
El desplazamiento
en la estructura real
EVAL. FZA. DE INERCIA EN UN SIST. CONTINUO
En Ing. Civil
Por: Maverick Aguirre Jara Por: Maverick Aguirre Jara
FACTOR DE AMPLIFICACIÓN DINÁMICA
componente
𝑚 𝑥 + 𝑘𝑥 = 𝑃 𝑡
𝑥 + 𝜔2𝑥 =1
𝑚𝑃 𝑡
𝑋(𝑡) = 𝑋(𝑜)𝑐𝑜𝑠𝜔𝑡 + 𝑋 𝑜
𝜔−
𝑃𝑜Ω
𝑚 𝜔2 − Ω2𝑠𝑒𝑛𝜔𝑡 +
𝑃𝑜𝑚 𝜔2 − Ω2
𝑠𝑒𝑛Ω𝑡
𝑋(0) = 0 𝑋 𝑜 = 0
𝑃 𝑡 = 𝑃𝑜𝑠𝑒𝑛Ω𝑡
𝑋(0) ≠ 0 𝑋 𝑜 ≠ 0
𝑋(𝑡) =𝑃𝑜
𝑚 𝜔2 − Ω2𝑠𝑒𝑛Ω𝑡
𝐷 =𝑋𝑑𝑖𝑛𝑋𝑒𝑠𝑡
𝑋𝑑𝑖𝑛 = 𝑋(𝑡) =𝑃𝑜
𝑚 𝜔2 − Ω2𝑠𝑒𝑛Ω𝑡
𝑋𝑒𝑠𝑡 =𝑃𝑜𝐾 𝛽 =
Ω
𝜔
𝐷 =1
1 −Ω2
𝜔2
𝑠𝑒𝑛Ω𝑡
𝐷𝑚𝑎𝑥 =1
1 −Ω2
𝜔2
Ω ≠ 𝜔
Ω = 𝜔
𝑋(𝐻) = 𝐴𝑐𝑜𝑠𝑤𝑡 + 𝐵𝑠𝑒𝑛𝑤𝑡
𝑋(𝑃) = 𝐶𝑠𝑒𝑛𝑡𝐶 =
𝑃𝑜𝑚(𝑤2 −2)
𝑋(𝐻) 𝑋(𝑃)
𝑌(𝑥,𝑡) = 𝜓(𝑥)𝑍(𝑡)
𝐴𝑠𝑢𝑚𝑖𝑟 𝜓(𝑥)
𝑚∗ 𝑍 + 𝐶∗ 𝑍 + 𝐾∗𝑍 = − 𝑚(𝑥)𝜓(𝑥)𝑑𝑥 𝑌𝑠(𝑡)
𝑙 = 𝑚(𝑥)𝜓(𝑥)𝑑𝑥
𝑚∗ 𝑍 + 𝐶∗ 𝑍 + 𝐾∗𝑍 = −𝑙 𝑌𝑠(𝑡)
𝑍 + 2𝜁𝜔 𝑍 + 𝜔2𝑍 = −𝑙
𝑚∗ 𝑌𝑠(𝑡)
𝑙
𝑚∗
𝑍(𝑡) = −1
𝜔𝐷
𝑙
𝑚∗ 𝑒−𝜁𝑤 𝑡 𝑌𝑠(𝑡)𝑠𝑒𝑛𝜔𝐷 𝑡𝑑𝜏
𝑉(𝑡)
𝑍(𝑡) = −1
𝜔𝐷
𝑙
𝑚∗ 𝑉(𝑡)
𝑌(𝑥,𝑡) = −𝜓(𝑥)
𝜔𝐷
𝑙
𝑚∗𝑉(𝑡)
𝑀(𝑥,𝑡) = 𝐸𝐼(𝑥)𝜓′′(𝑥)
𝜔𝐷
𝑙
𝑚∗ 𝑉(𝑡)
𝑀𝑚𝑎𝑥 = 𝐸𝐼(𝑥)𝜓′′(𝑥)
𝜔𝐷
𝑙
𝑚∗ 𝑃𝑠𝑣
𝑉 =𝑑𝑀
𝑑𝑥
𝑉𝑏 =𝑙2𝜔𝐷
𝑚∗ 𝑉(𝑡) 𝑉𝑚𝑎𝑥 =𝑙2𝜔
𝑚∗ 𝑃𝑠𝑣
𝑌 𝑥 𝑚𝑎𝑥 =𝜓(𝑥)
𝜔𝐷
𝑙
𝑚∗ 𝑉(𝑡)
𝑌 𝑥 𝑚𝑎𝑥 =𝜓(𝑥)
𝜔
𝑙
𝑚∗ 𝑃𝑠𝑣
𝑌 𝑥 𝑚𝑎𝑥 =𝜓(𝑥)𝑙
𝑚∗ 𝑃𝑠𝑑
𝑌 𝑥 𝑚𝑎𝑥 =𝜓(𝑥)𝑙
𝜔2𝑚∗ 𝑃𝑠𝑎
𝐹𝐼 𝑥,𝑡 =𝑚(𝑥)𝜓(𝑥)𝜔𝑙
𝑚∗𝑉(𝑡)
𝐹𝐼𝑚𝑎𝑥 =𝑚(𝑥)𝜓(𝑥)𝜔𝑙
𝑚∗𝑃𝑠𝑣
𝐹𝐼𝑚𝑎𝑥 =𝑚(𝑥)𝜓(𝑥)𝑙
𝑚∗𝑃𝑠𝑎
𝐶 =𝑃𝑠𝑎
𝑔
𝜔𝐷 = 𝜔
2.2. SIST. FORZADOS CON AMORTIGUAMIENTO La Solucion es X(t) = XH +XPSistema continuo de α gdl
REDUCIR LOS GDL gdl = ngdl = α Se asume una función Para poder resolver manualmente
forma de vibrarEn la actualidad se modela con todos sus gdl
en Prg como ETABS 2013, SAP 2000
COMO ELEGIR 2.2.1. PARA UNA CARGA DINAMICA P(t) = PoSen Ωt
Función cualquiera que debe cumplirlas condiciones de borde MASA GENERALIZADA
(condiciones de apoyo)
Elegir 2 ó mas para eliminar RIGIDEZ GENRALIZADA
incertidumbres
mal elegida aumenta la rigidez AMORTIGUAMIENTO GENERL
(K)
adecuada genera la menor ω
CARGA GENERALIZADA
Se desprecia la componente tranciente
mi masas puntualeski reortes puntualesk(x) resortes distribuidosQ+ cargas puntuales Desplazamiento del sueloSR solidos rigidos
Desplazamiento relativo
Pag - 12 Pag - 05
Sistema discreto
SISTEMA SÍSMICO
SISTEMAS CONTINUOS
PARAMETROS GENERALIZADOS
Por: Maverick Aguirre Jara Por: Maverick Aguirre Jara
CASO PARTICULAR
𝑚 𝑥 + 𝑐 𝑥 + 𝑘𝑥 = 𝑃 𝑡
𝑥 + 2𝜉𝜔 𝑥 + 𝜔2𝑥 =1
𝑚𝑃 𝑡
𝑚∗ = 0
𝑙
𝑚(𝑥) 𝜓 𝑥2 𝑑𝑥 +
𝑖=1
𝑛
𝑚𝑖𝜓𝑖2 +
𝑖=1
𝑛
𝐼𝑜𝑖 𝜓𝑖´ 2
𝐾∗ = 0
𝑙
𝐸𝐼(𝑥) 𝜓(𝑥)´´ 2
𝑑𝑥 + 0
𝑙
𝐾(𝑥)𝜓(𝑥)2 𝑑𝑥 +
𝑖=1
𝑛
𝐾𝑖 Δ𝜓𝑖2
𝐶∗ = 0
𝑙
𝐶(𝑥)𝜓(𝑥)2 𝑑𝑥 +
𝑖=1
𝑛
𝐶𝑖 𝜓𝑖2
𝑃∗ = 0
𝑙
𝑃(𝑥,𝑡)𝜓(𝑥)𝑑𝑥 +
𝑖=1
𝑛
𝑃𝑖𝜓𝑖
𝑌(𝑥,𝑡) = 𝜓(𝑥)𝑍(𝑡)
𝜓(𝑥)
𝑚∗ = 0
𝑙
𝑚(𝑥) 𝜓 𝑥2 𝑑𝑥
𝐾∗ = 0
𝑙
𝐸𝐼(𝑥) 𝜓(𝑥)´´ 2
𝑑𝑥
𝐶∗ = 0
𝑙
𝐶(𝑥)𝜓(𝑥)2 𝑑𝑥
𝑃∗ = 0
𝑙
𝑃(𝑥,𝑡)𝜓(𝑥)𝑑𝑥
𝜓(𝑥)
𝜓(𝑥)
𝜓(𝑥)
𝜓(𝑥)
𝑋𝐻 = 𝑒−𝜔𝜁𝑡[𝐴 cos𝜔𝐷𝑡 + B sen𝜔𝐷𝑡]
𝑋𝑒𝑠𝑡 =𝑃𝑜𝐾𝛽 =
Ω
𝜔
𝑋𝑃 =𝑋𝑒𝑠𝑡
1 − 𝛽2 2 + 2𝜁𝛽 2 1− 𝛽2 𝑠𝑒𝑛Ω𝑡 − 2𝜁𝛽𝑐𝑜𝑠Ω𝑡
𝑚 𝑥𝑟 + 𝐶 𝑥𝑟 + 𝐾𝑥𝑟 = −𝑚 𝑥𝑠
𝑥𝑟 + 2𝜁𝜔 𝑥𝑟 + 𝜔2𝑥𝑟 = − 𝑥𝑠
𝑥𝑟:
𝑥𝑠:
𝑚 𝑥 + 𝐶 𝑥 + 𝐾𝑥 = 𝑃(𝑡) = 𝑃𝑜𝑠𝑒𝑛Ω𝑡
𝑋𝑝 = 𝜌𝑠𝑒𝑛(Ω𝑡 − 𝜃)𝜌 =
𝑋𝑒𝑠𝑡
(1 − 𝛽2)2+(2𝜁𝛽)2
𝜃 = 𝑎𝑟𝑐𝑡𝑔2𝜁𝛽
1 − 𝛽2
a = 𝑋𝑒𝑠𝑡(1−𝛽2)
(1−𝛽2)2+(2𝜁𝛽)2
b = 𝑋𝑒𝑠𝑡2𝜁𝛽
(1−𝛽2)2+(2𝜁𝛽)2ab
𝑋(𝑡) = 𝑋𝐻 + 𝑋𝑃
𝑋(𝑡) = 𝑋𝑃
𝑋𝐻 = 𝑒−𝜁𝜔𝑡 𝐴𝑐𝑜𝑠𝜔𝐷𝑡 + 𝐵𝑠𝑒𝑛𝜔𝐷𝑡
𝑋𝑃 = 𝐶1𝑠𝑒𝑛Ω𝑡 + 𝐶2𝑐𝑜𝑠Ω𝑡
2.2.2. PARA UNA CARGA DINAMICA P(t) = CARGA PERIODICA
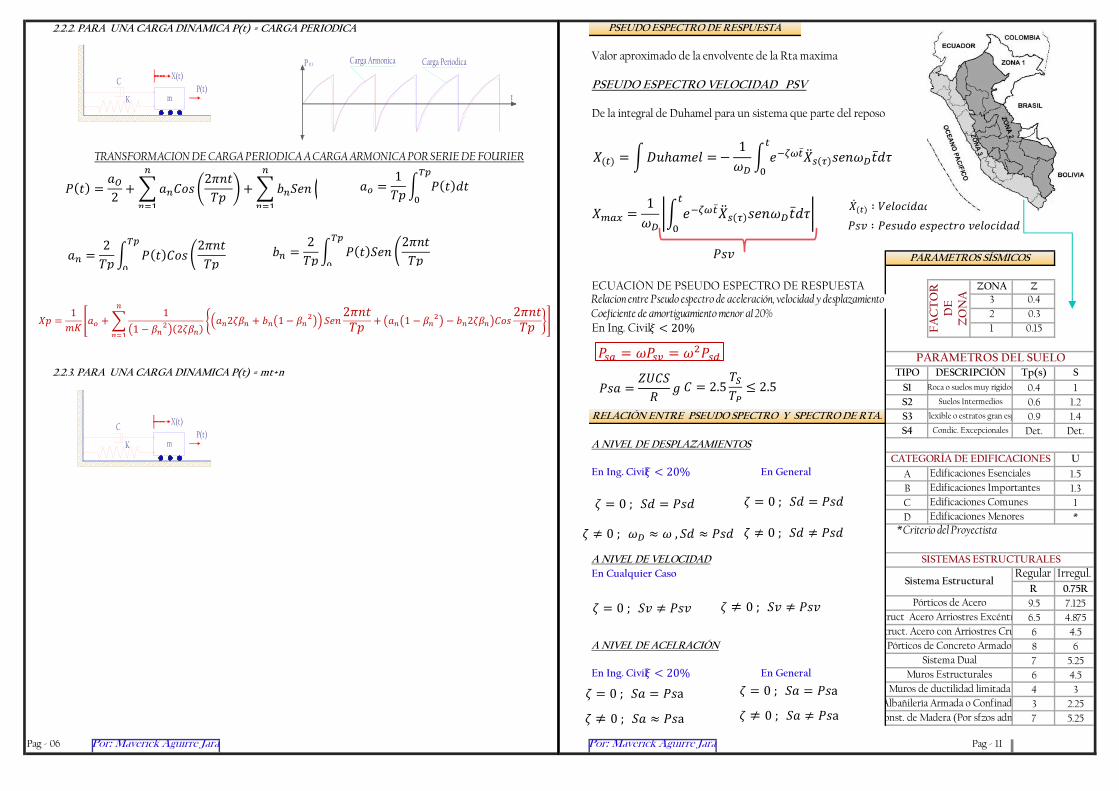
Valor aproximado de la envolvente de la Rta maxima
PSEUDO ESPECTRO VELOCIDAD PSV
De la integral de Duhamel para un sistema que parte del reposo
TRANSFORMACIÓN DE CARGA PERIODICA A CARGA ARMONICA POR SERIE DE FOURIER
ECUACIÓN DE PSEUDO ESPECTRO DE RESPUESTA ZONA ZRelacion entre Pseudo espectro de aceleración, velocidad y desplazamiento 3 0.4
Coeficiente de amortiguamiento menor al 20% 2 0.3
En Ing. Civil 1 0.15
2.2.3. PARA UNA CARGA DINAMICA P(t) = mt+n TIPO Tp(s) S
S1 0.4 1
S2 0.6 1.2
S3 0.9 1.4
S4 Det. Det.
A NIVEL DE DESPLAZAMIENTOS
UEn Ing. Civil En General A 1.5
B 1.3
C 1
D ** Criterio del Proyectista
A NIVEL DE VELOCIDAD
En Cualquier Caso Regular Irregul.
R 0.75R
9.5 7.125
6.5 4.875
6 4.5A NIVEL DE ACELRACIÓN 8 6
7 5.25En Ing. Civil En General 6 4.5
4 3
3 2.25
7 5.25
Pag - 06 Pag - 11
PSEUDO ESPECTRO DE RESPUESTA
PARÁMETROS DEL SUELO
FA
CT
OR
D
E
ZO
NA
Pórticos de Acero
Muros de ductilidad limitada
Albañilería Armada o Confinada
Const. de Madera (Por sfzos adm.)
DESCRIPCIÓN
Roca o suelos muy rígidos
Suelos Intermedios
Flexible o estratos gran esp.
Condic. Excepcionales
CATEGORÍA DE EDIFICACIONES
Edificaciones Esenciales
Edificaciones Importantes
Edificaciones Comunes
Edificaciones Menores
Struct Acero Arriostres Excéntrc.
Struct. Acero con Arriostres Cruz
Pórticos de Concreto Armado
Sistema Dual
Muros Estructurales
PARAMETROS SÍSMICOS
Por: Maverick Aguirre Jara Por: Maverick Aguirre Jara
RELACIÓN ENTRE PSEUDO SPECTRO Y SPECTRO DE RTA.
Sistema Estructural
SISTEMAS ESTRUCTURALES
𝑃𝑠𝑎 = 𝜔𝑃𝑠𝑣 = 𝜔2𝑃𝑠𝑑
𝜉 < 20%
𝑃 𝑡 =𝑎𝑂2+
𝑛=1
𝑛
𝑎𝑛𝐶𝑜𝑠2𝜋𝑛𝑡
𝑇𝑝+
𝑛=1
𝑛
𝑏𝑛𝑆𝑒𝑛2𝜋𝑛𝑡
𝑎𝑜 =1
𝑇𝑝 0
𝑇𝑝
𝑃 𝑡 𝑑𝑡
𝑎𝑛 =2
𝑇𝑝 0
𝑇𝑝
𝑃 𝑡 𝐶𝑜𝑠2𝜋𝑛𝑡
𝑇𝑝𝑏𝑛 =
2
𝑇𝑝 0
𝑇𝑝
𝑃 𝑡 𝑆𝑒𝑛2𝜋𝑛𝑡
𝑇𝑝
𝑋𝑝 =1
𝑚𝐾𝑎𝑜 +
𝑛=1
𝑛1
1 − 𝛽𝑛2 2𝜁𝛽𝑛
𝑎𝑛2𝜁𝛽𝑛 + 𝑏𝑛 1 − 𝛽𝑛2 𝑆𝑒𝑛
2𝜋𝑛𝑡𝑇𝑝
+ 𝑎𝑛 1 − 𝛽𝑛2 − 𝑏𝑛2𝜁𝛽𝑛 𝐶𝑜𝑠
2𝜋𝑛𝑡𝑇𝑝
𝑋(𝑡) = 𝐷𝑢ℎ𝑎𝑚𝑒𝑙 =−1
𝜔𝐷 0
𝑡
𝑒−𝜁𝜔 𝑡 𝑋𝑠 𝜏 𝑠𝑒𝑛𝜔𝐷 𝑡𝑑𝜏
𝑋𝑚𝑎𝑥 =1
𝜔𝐷 0
𝑡
𝑒−𝜁𝜔 𝑡 𝑋𝑠 𝜏 𝑠𝑒𝑛𝜔𝐷 𝑡𝑑𝜏
𝑃𝑠𝑣
𝑋(𝑡) ∶ 𝑉𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑
𝑃𝑠𝑣 ∶ 𝑃𝑒𝑠𝑢𝑑𝑜 𝑒𝑠𝑝𝑒𝑐𝑡𝑟𝑜 𝑣𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑
𝑃𝑠𝑎 =𝑍𝑈𝐶𝑆
𝑅𝑔 𝐶 = 2.5
𝑇𝑆𝑇𝑃
≤ 2.5
𝜉 < 20%
𝜁 = 0 ; 𝑆𝑑 = 𝑃𝑠𝑑
𝜁 ≠ 0 ; 𝜔𝐷 ≈ 𝜔 , 𝑆𝑑 ≈ 𝑃𝑠𝑑
𝜁 = 0 ; 𝑆𝑑 = 𝑃𝑠𝑑
𝜁 ≠ 0 ; 𝑆𝑑 ≠ 𝑃𝑠𝑑
𝜁 = 0 ; 𝑆𝑣 ≠ 𝑃𝑠𝑣 𝜁 ≠ 0 ; 𝑆𝑣 ≠ 𝑃𝑠𝑣
𝜉 < 20%
𝜁 = 0 ; 𝑆𝑎 = 𝑃𝑠a
𝜁 ≠ 0 ; 𝑆𝑎 ≈ 𝑃𝑠a
𝜁 = 0 ; 𝑆𝑎 = 𝑃𝑠a
𝜁 ≠ 0 ; 𝑆𝑎 ≠ 𝑃𝑠a
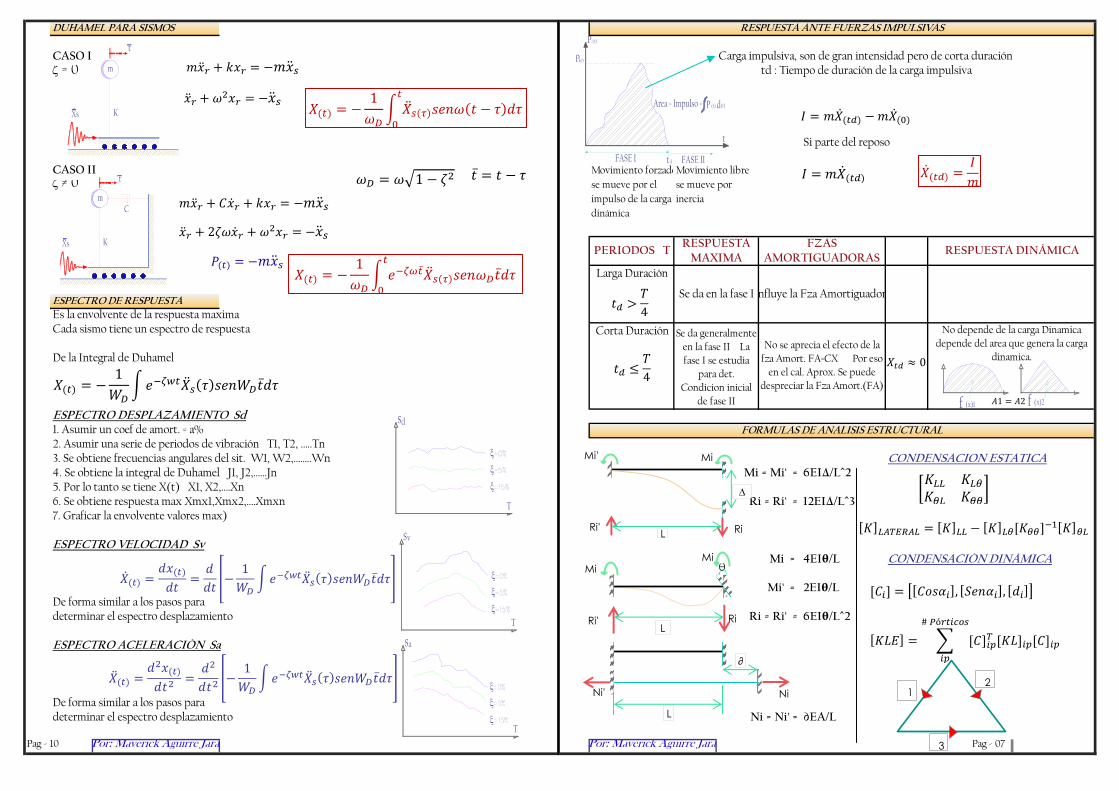
CASO I Carga impulsiva, son de gran intensidad pero de corta duraciónz = 0 td : Tiempo de duración de la carga impulsiva
Si parte del reposo
CASO II Movimiento forzadoMovimiento libre
z ≠ 0 se mueve por el se mueve por
impulso de la carga inercia
dinámica
Es la envolvente de la respuesta maximaCada sismo tiene un espectro de respuesta
De la Integral de Duhamel
ESPECTRO DESPLAZAMIENTO Sd1. Asumir un coef de amort. = a%2. Asumir una serie de periodos de vibración T1, T2, …..Tn3. Se obtiene frecuencias angulares del sit. W1, W2,……..Wn CONDENSACIÓN ESTÁTICA4. Se obtiene la integral de Duhamel J1, J2,……Jn Mi = Mi' = 6EI∆/L^25. Por lo tanto se tiene X(t) X1, X2,….Xn6. Se obtiene respuesta max Xmx1,Xmx2,….Xmxn Ri = Ri' = 12EI∆/L^37. Graficar la envolvente valores max)
ESPECTRO VELOCIDAD SvMi = 4EIθ/L CONDENSACIÓN DINÁMICA
Mi' = 2EIθ/LDe forma similar a los pasos para determinar el espectro desplazamiento Ri = Ri' = 6EIθ/L^2
ESPECTRO ACELERACIÓN Sa
De forma similar a los pasos para determinar el espectro desplazamiento Ni = Ni' = ∂EA/L
Pag - 10 Pag - 07
FORMULAS DE ANALISIS ESTRUCTURAL
Corta Duración Se da generalmente
en la fase II La
fase I se estudia
para det.
Condicion inicial
de fase II
No se aprecia el efecto de la
fza Amort. FA=CX Por eso
en el cal. Aprox. Se puede
despreciar la Fza Amort.(FA)
No depende de la carga Dinamica
depende del area que genera la carga
dinamica.
PERIODOS TRESPUESTA
MAXIMAFZAS
AMORTIGUADORAS RESPUESTA DINÁMICA
Larga Duración
Se da en la fase IInfluye la Fza Amortiguadora
RESPUESTA ANTE FUERZAS IMPULSIVAS
Por: Maverick Aguirre Jara Por: Maverick Aguirre Jara
DUHAMEL PARA SISMOS
ESPECTRO DE RESPUESTA
𝑋(𝑡) = −1
𝑊𝐷 𝑒−𝜁𝑤𝑡 𝑋𝑠 𝜏 𝑠𝑒𝑛𝑊𝐷 𝑡𝑑𝜏
𝑋(𝑡) = −1
𝜔𝐷 0
𝑡
𝑋𝑠 𝜏 𝑠𝑒𝑛𝜔 𝑡 − 𝜏 𝑑𝜏
𝑋(𝑡) = −1
𝜔𝐷 0
𝑡
𝑒−𝜁𝜔 𝑡 𝑋𝑠 𝜏 𝑠𝑒𝑛𝜔𝐷 𝑡𝑑𝜏
𝜔𝐷 = 𝜔 1 − 𝜁2 𝑡 = 𝑡 − 𝜏
𝑚 𝑥𝑟 + 𝑘𝑥𝑟 = −𝑚 𝑥𝑠
𝑥𝑟 + 𝜔2𝑥𝑟 = − 𝑥𝑠
𝑚 𝑥𝑟 + 𝐶 𝑥𝑟 + 𝑘𝑥𝑟 = −𝑚 𝑥𝑠
𝑥𝑟 + 2𝜁𝜔 𝑥𝑟 + 𝜔2𝑥𝑟 = − 𝑥𝑠
𝑃(𝑡) = −𝑚 𝑥𝑠
𝑋(𝑡) =𝑑𝑥(𝑡)
𝑑𝑡=
𝑑
𝑑𝑡−
1
𝑊𝐷 𝑒−𝜁𝑤𝑡 𝑋𝑠 𝜏 𝑠𝑒𝑛𝑊𝐷 𝑡𝑑𝜏
𝑋(𝑡) =𝑑2𝑥(𝑡)
𝑑𝑡2=
𝑑2
𝑑𝑡2−
1
𝑊𝐷 𝑒−𝜁𝑤𝑡 𝑋𝑠 𝜏 𝑠𝑒𝑛𝑊𝐷 𝑡𝑑𝜏
𝑡𝑑 >𝑇
4
𝑡𝑑 ≤𝑇
4𝑋𝑡𝑑 ≈ 0
𝐼 = 𝑚 𝑋(𝑡𝑑) −𝑚 𝑋(0)
𝐼 = 𝑚 𝑋(𝑡𝑑) 𝑋(𝑡𝑑) =𝐼
𝑚
𝐴1 = 𝐴2
𝐾𝐿𝐿 𝐾𝐿𝜃𝐾𝜃𝐿 𝐾𝜃𝜃
𝐾 𝐿𝐴𝑇𝐸𝑅𝐴𝐿 = 𝐾 𝐿𝐿 − 𝐾 𝐿𝜃[𝐾𝜃𝜃]−1 𝐾 𝜃𝐿
Mi' Mi
Ri' RiL
∆
Ri' RiL
θMiMi
Ni' Ni
L
∂
𝐾𝐿𝐸 =
𝑖𝑝
# 𝑃ó𝑟𝑡𝑖𝑐𝑜𝑠
[𝐶]𝑖𝑝𝑇 [𝐾𝐿]𝑖𝑝[𝐶]𝑖𝑝
[𝐶𝑖] = 𝐶𝑜𝑠𝛼𝑖 , 𝑆𝑒𝑛𝛼𝑖 , 𝑑𝑖
3
12
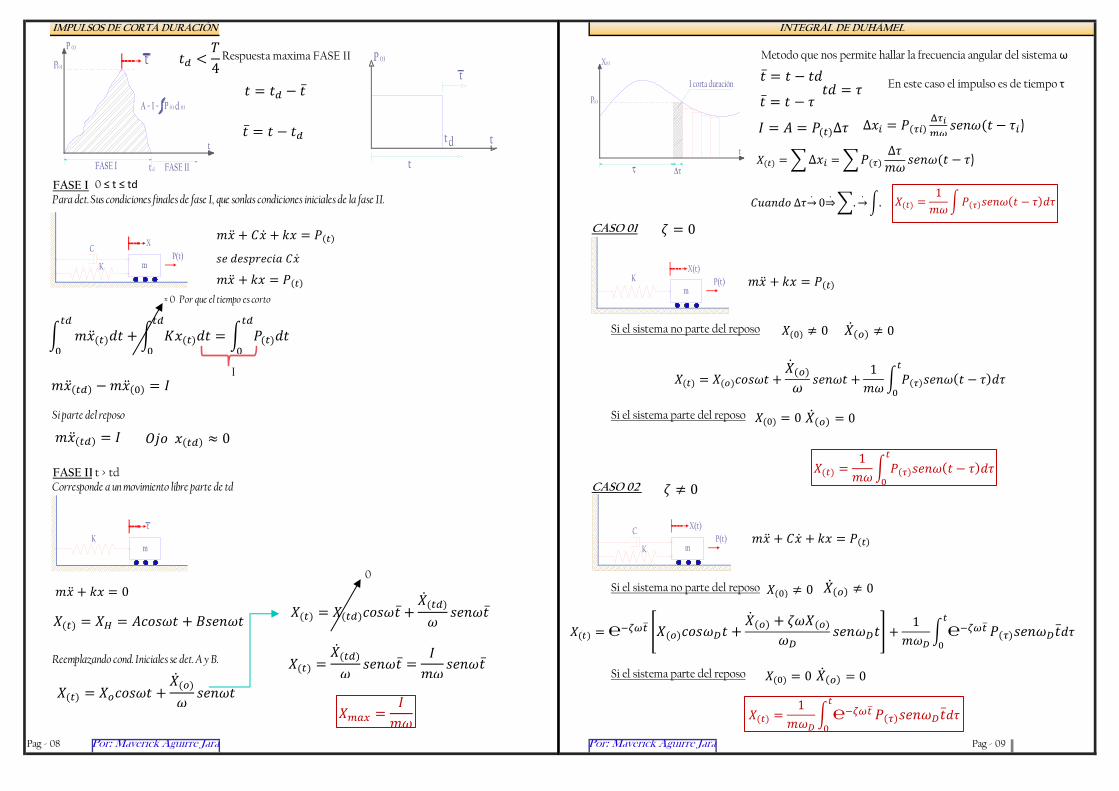
Respuesta maxima FASE II Metodo que nos permite hallar la frecuencia angular del sistema ω
En este caso el impulso es de tiempo τ
FASE I 0 ≤ t ≤ td
Para det. Sus condiciones finales de fase I, que sonlas condiciones iniciales de la fase II.
CASO 01
≈ 0 Por que el tiempo es corto
Si el sistema no parte del reposo
I
Si parte del reposo Si el sistema parte del reposo
FASE II t > tdCorresponde a un movimiento libre parte de td CASO 02
0Si el sistema no parte del reposo
Reemplazando cond. Iniciales se det. A y B.Si el sistema parte del reposo
Pag - 08 Pag - 09
IMPULSOS DE CORTA DURACIÓN ( I )
Por: Maverick Aguirre Jara Por: Maverick Aguirre Jara
INTEGRAL DE DUHAMEL
𝑋(𝑡) = 𝑋(𝑜)𝑐𝑜𝑠𝜔𝑡 + 𝑋 𝑜
𝜔𝑠𝑒𝑛𝜔𝑡 +
1
𝑚𝜔 0
𝑡
𝑃 𝜏 𝑠𝑒𝑛𝜔 𝑡 − 𝜏 𝑑𝜏
𝑋(𝑡) =1
𝑚𝜔 0
𝑡
𝑃 𝜏 𝑠𝑒𝑛𝜔 𝑡 − 𝜏 𝑑𝜏
𝑋(𝑡) =−𝜁𝜔 𝑡 𝑋(𝑜)𝑐𝑜𝑠𝜔𝐷𝑡 + 𝑋 𝑜 + 𝜁𝜔𝑋(𝑜)
𝜔𝐷𝑠𝑒𝑛𝜔𝐷𝑡 +
1
𝑚𝜔𝐷 0
𝑡
−𝜁𝜔 𝑡 𝑃 𝜏 𝑠𝑒𝑛𝜔𝐷 𝑡𝑑𝜏
𝑋(𝑡) =1
𝑚𝜔𝐷 0
𝑡
−𝜁𝜔 𝑡 𝑃 𝜏 𝑠𝑒𝑛𝜔𝐷 𝑡𝑑𝜏
𝑚 𝑥 + 𝑘𝑥 = 𝑃 𝑡
𝑚 𝑥 + 𝐶 𝑥 + 𝑘𝑥 = 𝑃 𝑡
𝜁 = 0
𝜁 ≠ 0
𝑋(0) ≠ 0 𝑋 𝑜 ≠ 0
𝑋(0) ≠ 0 𝑋 𝑜 ≠ 0
𝑋(0) = 0 𝑋 𝑜 = 0
𝑋(0) = 0 𝑋 𝑜 = 0
𝑡 = 𝑡 − 𝑡𝑑
𝑡 = 𝑡 − 𝜏
𝑚 𝑥 + 𝐶 𝑥 + 𝑘𝑥 = 𝑃 𝑡
𝑠𝑒 𝑑𝑒𝑠𝑝𝑟𝑒𝑐𝑖𝑎 𝐶 𝑥
𝑡𝑑 <𝑇
4
𝑡 = 𝑡𝑑 − 𝑡
𝑡 = 𝑡 − 𝑡𝑑
𝑚 𝑥 + 𝑘𝑥 = 0
𝑋(𝑡) = 𝑋𝐻 = 𝐴𝑐𝑜𝑠𝜔𝑡 + 𝐵𝑠𝑒𝑛𝜔𝑡
𝑋(𝑡) = 𝑋𝑜𝑐𝑜𝑠𝜔𝑡 + 𝑋(𝑜)
𝜔𝑠𝑒𝑛𝜔𝑡
𝑋(𝑡) = 𝑋(𝑡𝑑)𝑐𝑜𝑠𝜔 𝑡 + 𝑋(𝑡𝑑)
𝜔𝑠𝑒𝑛𝜔 𝑡
𝑋(𝑡) = 𝑋(𝑡𝑑)
𝜔𝑠𝑒𝑛𝜔 𝑡 =
𝐼
𝑚𝜔𝑠𝑒𝑛𝜔 𝑡
𝑋𝑚𝑎𝑥 =𝐼
𝑚𝜔
𝑚 𝑥 + 𝑘𝑥 = 𝑃 𝑡
0
𝑡𝑑
𝑚 𝑥(𝑡)𝑑𝑡 + 0
𝑡𝑑
𝐾𝑥(𝑡)𝑑𝑡 = 0
𝑡𝑑
𝑃(𝑡)𝑑𝑡
𝑚 𝑥 𝑡𝑑 −𝑚 𝑥 0 = 𝐼
𝑚 𝑥 𝑡𝑑 = 𝐼 𝑂𝑗𝑜 𝑥 𝑡𝑑 ≈ 0
𝐼 = 𝐴 = 𝑃(𝑡)Δ𝜏
𝑡𝑑 = 𝜏
Δ𝑥𝑖 = 𝑃 𝜏𝑖Δ𝜏𝑖
𝑚𝜔𝑠𝑒𝑛𝜔(𝑡 − 𝜏𝑖)
𝑋(𝑡) = Δ𝑥𝑖 = 𝑃 𝜏Δ𝜏
𝑚𝜔𝑠𝑒𝑛𝜔(𝑡 − 𝜏)
𝐶𝑢𝑎𝑛𝑑𝑜 Δ𝜏 .0
. .
. . 𝑋(𝑡) =
1
𝑚𝜔 𝑃 𝜏 𝑠𝑒𝑛𝜔 𝑡 − 𝜏 𝑑𝜏