Form Symmetries and Reduction oF order in Difference...
322
ADVANCES IN DISCRETE MATHEMATICS AND ITS APPLICATIONS F ORM S YMMETRIES AND R EDUCTION OF O RDER IN D IFFERENCE E QUATIONS HASSAN SEDAGHAT
Transcript of Form Symmetries and Reduction oF order in Difference...

ADVANCES IN DISCRETE MATHEMATICS AND ITS APPLICATIONS
Form SymmetrieS
and reduction oF order in diFFerence
equationS
Fo
rm
Sy
mm
et
rie
S an
d re
du
ct
ion o
F o
rd
er in d
iFFer
en
ce e
qu
at
ion
SS
EDA
GH
AT
HASSAN SEDAGHAT
Form Symmetries and Reduction of Order in Difference Equations presents a new approach to the formulation and analysis of difference equations in which the underlying space is typically an algebraic group. In some problems and applications, an additional algebraic or topological structure is assumed in order to define equations and obtain significant results about them. Reflecting the author’s past research experience, the majority of examples involve equations in finite dimensional Euclidean spaces.
Covering difference equations on groups, the author first illustrates the wide variety of possible formulations and interpretations of difference equations that occur in concrete contexts. He then proposes a systematic method of decomposition for recursive difference equations that uses a semiconjugate relation between maps. The final chapter goes beyond semiconjugacy by extending the fundamental ideas based on form symmetries to nonrecursive difference equations.
Features • Uses form symmetries to define semiconjugate factorizations of
recursive higher-order difference equations and general nonrecursive higher-order difference equations
• Presents many of the main concepts and results using simple algebraic structures, such as groups and fields
• Applies the methods to large classes of difference equations, including nonautonomous and nonhomogeneous linear equations, quadratic difference equations, and separable difference equations
• Includes many new results in print for the first time
With numerous examples and exercises, this book is an ideal introduction to an exciting new domain in the area of difference equations. It takes a fresh and all-inclusive look at difference equations and develops a systematic procedure for examining how these equations are constructed and solved.
Mathematics
K10389
K10389_Cover.indd 1 4/15/11 9:02 AM

Form SymmetrieS
and reduction oF order in diFFerence
equationS
K10389_FM.indd 1 4/13/11 10:27 AM

K10389_FM.indd 2 4/13/11 10:28 AM

Form SymmetrieS
and reduction oF order in diFFerence
equationS
HASSAN SEDAGHATVIRGINIA COMMONWEALTH UNIVERSITY
RICHMOND, USA
ADVANCES IN DISCRETE MATHEMATICS AND ITS APPLICATIONS
K10389_FM.indd 3 4/13/11 10:28 AM

CRC PressTaylor & Francis Group6000 Broken Sound Parkway NW, Suite 300Boca Raton, FL 33487-2742
© 2011 by Taylor & Francis Group, LLCCRC Press is an imprint of Taylor & Francis Group, an Informa business
No claim to original U.S. Government worksVersion Date: 20111012
International Standard Book Number-13: 978-1-4398-0764-4 (eBook - PDF)
This book contains information obtained from authentic and highly regarded sources. Reasonable efforts have been made to publish reliable data and information, but the author and publisher cannot assume responsibility for the validity of all materials or the consequences of their use. The authors and publishers have attempted to trace the copyright holders of all material reproduced in this publication and apologize to copyright holders if permission to publish in this form has not been obtained. If any copyright material has not been acknowledged please write and let us know so we may rectify in any future reprint.
Except as permitted under U.S. Copyright Law, no part of this book may be reprinted, reproduced, transmit-ted, or utilized in any form by any electronic, mechanical, or other means, now known or hereafter invented, including photocopying, microfilming, and recording, or in any information storage or retrieval system, without written permission from the publishers.
For permission to photocopy or use material electronically from this work, please access www.copyright.com (http://www.copyright.com/) or contact the Copyright Clearance Center, Inc. (CCC), 222 Rosewood Drive, Danvers, MA 01923, 978-750-8400. CCC is a not-for-profit organization that provides licenses and registration for a variety of users. For organizations that have been granted a photocopy license by the CCC, a separate system of payment has been arranged.
Trademark Notice: Product or corporate names may be trademarks or registered trademarks, and are used only for identification and explanation without intent to infringe.
Visit the Taylor & Francis Web site athttp://www.taylorandfrancis.com
and the CRC Press Web site athttp://www.crcpress.com

Contents
Preface ix
1 Introduction 1
2 Difference Equations on Groups 52.1 Basic definitions . . . . . . . . . . . . . . . . . . . . . . . . . 62.2 One equation, many interpretations . . . . . . . . . . . . . . . 102.3 Examples of difference equations on groups . . . . . . . . . . 192.4 Notes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282.5 Problems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3 Semiconjugate Factorization and Reduction of Order 353.1 Semiconjugacy and ordering of maps . . . . . . . . . . . . . . 35
3.1.1 Basic concepts . . . . . . . . . . . . . . . . . . . . . . 353.1.2 Coordinate transformations vs semiconjugacy . . . . . 363.1.3 Semiconjugacy as a map-ordering relation . . . . . . . 383.1.4 The semiconjugacy problem . . . . . . . . . . . . . . . 393.1.5 Semiconjugacy and difference equations . . . . . . . . 413.1.6 Invariants . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.2 Form symmetries and SC factorizations . . . . . . . . . . . . 443.2.1 Order-reducing form symmetries . . . . . . . . . . . . 443.2.2 The semiconjugate factorization theorem . . . . . . . . 46
3.3 Order-reduction types . . . . . . . . . . . . . . . . . . . . . . 503.3.1 The basic concept . . . . . . . . . . . . . . . . . . . . 503.3.2 Nonuniqueness of factorizations and reduction types . 513.3.3 Reduction types (k, 1) and (1, k) . . . . . . . . . . . . 533.3.4 Factor and cofactor chains . . . . . . . . . . . . . . . . 54
3.4 SC factorizations as triangular systems . . . . . . . . . . . . . 553.5 Order-preserving form symmetries . . . . . . . . . . . . . . . 573.6 Notes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 603.7 Problems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4 Homogeneous Equations of Degree One 654.1 Homogeneous equations on groups . . . . . . . . . . . . . . . 654.2 Characteristic form symmetry of HD1 equations . . . . . . . . 684.3 Reductions of order in HD1 equations . . . . . . . . . . . . . 704.4 *Absolute value equation . . . . . . . . . . . . . . . . . . . . 79
v

vi
4.5 Notes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1044.6 Problems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
5 Type-(k,1) Reductions 1075.1 Invertible-map criterion . . . . . . . . . . . . . . . . . . . . . 1075.2 Identity form symmetry . . . . . . . . . . . . . . . . . . . . . 1095.3 Inversion form symmetry . . . . . . . . . . . . . . . . . . . . . 1135.4 *Discrete Riccati equation of order two . . . . . . . . . . . . 1155.5 Linear form symmetry . . . . . . . . . . . . . . . . . . . . . . 128
5.5.1 Determination criterion . . . . . . . . . . . . . . . . . 1285.5.2 Periodic solutions . . . . . . . . . . . . . . . . . . . . 1325.5.3 *Limit cycles . . . . . . . . . . . . . . . . . . . . . . . 135
5.6 Difference equations with linear arguments . . . . . . . . . . . 1395.6.1 The reduction theorem . . . . . . . . . . . . . . . . . . 1405.6.2 Economics: Modeling the business cycle . . . . . . . . 1435.6.3 Repeated reductions of order . . . . . . . . . . . . . . 1445.6.4 SC factorization of linear equations, factor chains . . . 1485.6.5 *A rational equation with chaotic solutions . . . . . . 151
5.7 Field-inverse form symmetry . . . . . . . . . . . . . . . . . . . 1615.8 Notes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1625.9 Problems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
6 Type-(1,k) Reductions 1696.1 Linear form symmetry revisited . . . . . . . . . . . . . . . . . 1706.2 Separable difference equations . . . . . . . . . . . . . . . . . 170
6.2.1 Form symmetries of additive forms over fields . . . . . 1716.2.2 SC factorization of linear equations, cofactor chains . 1796.2.3 Form symmetries of multiplicative forms over subgroups
of C\{0} . . . . . . . . . . . . . . . . . . . . . . . . . . 1836.3 Equations with exponential and power functions . . . . . . . 189
6.3.1 The reduction theorem . . . . . . . . . . . . . . . . . . 1896.3.2 Reductions in orders of expow equations . . . . . . . . 1926.3.3 Repeated reductions of order . . . . . . . . . . . . . . 1956.3.4 Solutions of equations containing only power functions 1976.3.5 Biology: Modeling populations . . . . . . . . . . . . . 203
6.4 Notes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2116.5 Problems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211
7 Time-Dependent Form Symmetries 2177.1 The semiconjugate relation and factorization . . . . . . . . . 2177.2 Invertible-map criterion revisited . . . . . . . . . . . . . . . . 2217.3 Time-dependent linear form symmetry . . . . . . . . . . . . . 2237.4 SC factorization of linear equations . . . . . . . . . . . . . . 227
7.4.1 Factorization theorem for linear equations . . . . . . . 2277.4.2 Constant coefficients without field extensions . . . . . 230

vii
7.4.3 Implications of the existence of constant solutions ofthe Riccati equation . . . . . . . . . . . . . . . . . . . 235
7.5 Notes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2367.6 Problems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 236
8 Nonrecursive Difference Equations 2398.1 Examples and discussion . . . . . . . . . . . . . . . . . . . . . 2408.2 Form symmetries, factors, and cofactors . . . . . . . . . . . . 2518.3 Semi-invertible map criterion . . . . . . . . . . . . . . . . . . 2558.4 Quadratic difference equations . . . . . . . . . . . . . . . . . . 259
8.4.1 Existence and variety of real solutions . . . . . . . . . 2618.4.2 Quadratic factors and cofactors . . . . . . . . . . . . . 2768.4.3 Quadratic equations with a linear form symmetry . . . 279
8.5 An order-preserving form symmetry . . . . . . . . . . . . . . 2858.6 Notes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2908.7 Problems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 291
A Appendix: Asymptotic Stability on the Real Line 297A.1 An inverse-map characterization . . . . . . . . . . . . . . . . 297A.2 Equivalent necessary and sufficient conditions . . . . . . . . . 302
References 305
Index 309

This page intentionally left blankThis page intentionally left blank

Preface
The field of difference equations is old, their study predating calculus andhence differential equations. Since the time of Fibonacci, if not earlier, recur-sions and finite differences have appeared in a variety of contexts. Further,finite differences and sums naturally lead to differential and integral calcu-lus through the concept of limit. In modern times, difference equations havea symbiotic relationship with their differential cousins: finite differences areroutinely used in obtaining numerical solutions of differential equations andinsights gained from the study of differential equations in turn inspire newinvestigations in difference equations.
Increasingly in the last few decades, difference equations have also beenstudied independently of differential ones, leading to interesting new discover-ies and methods of analysis. There are journals currently devoted specificallyto difference equations. These sources routinely publish articles of impres-sive technical quality that reflect the depth and sophistication of present-dayresearchers in this field.
The majority of articles and books on difference equations currently inprint concern topological and convergence issues (e.g., the asymptotic behav-iors of solutions) in metric spaces, predominantly finite-dimensional Euclideanspaces due to their importance in scientific models. Although these spaceseasily accommodate point sequences (solutions of difference equations) theyare primarily and naturally formulated for flows, i.e., solutions of differentialequations. There are comparatively few articles and even fewer books that aredevoted to the study of difference equations as objects or constructs on othertypes of sets. Yet other and more general types of sets are needed in order todetermine the most natural context for defining difference equations and im-prove their applicability to solving problems in biology, economics, computerscience and other fields.
One may argue that it is entirely natural to formulate and study differenceequations in discrete spaces where the topology is trivial but algebraic struc-ture may exist; or even in finite “spaces” such as graphs or networks thatoften contain a substantial connectivity or adjacency structure but which aretypically not amenable to analysis using limit-based techniques. Interestingdynamic behaviors can and do occur in discrete sets but lack of an efficienttool kit like calculus makes studying such dynamics rather difficult. It is nec-essary to fully utilize existing structures and methods (algebraic and discreteconcepts) in addition to the more classical analytical and topological methodswhere applicable in order to arrive at coherent and potentially useful results.
ix

x Form Symmetries and Reduction of Order
This book presents a new approach to formulation and study of differenceequations in which the underlying space is typically an algebraic group. Topo-logical structure is not shunned; on the contrary, reflecting my past researchexperience, most of the examples discussed in this book involve equationsin finite dimensional Euclidean spaces. In some cases, additional structurebeyond that of a group is needed in order to define certain equations andto obtain significant results about them. For instance, in the case of linearequations I take the underlying set to be a field so as to derive completesemiconjugate factorizations into triangular systems of first-order equationsbased on the eigenvalues (or eigensequences in nonautonomous cases). Forcertain concepts such as those in the final chapter that do not require a groupstructure I do not assume it. In short, my aim in this book is to take a freshand all-inclusive look at difference equations and develop a systematic pro-cedure to examine how the manner in which these equations are constructedfrom sets, operations, variables, constants, etc. determines their solutions,i.e., sequences that satisfy them.
This book contains many new results some of which are appearing in printfor the first time. The easy style of presentation with a generous supply ofexamples, explanations and exercises all within one cover makes this bookan ideal introduction to an exciting new domain in the continuously evolvingfield of difference equations.
Outline of the book. After some introductory remarks in Chapter 1, Iintroduce difference equations on groups in Chapter 2, not only to lay thefoundation for later chapters but also to illustrate the amazing variety ofpossible formulations and interpretations of difference equations that occur inconcrete contexts. The group formalism includes maps since vector spaces aregroups; it includes even some types of partial difference equations that can beformulated as maps of infinite dimensional spaces. Although by themselvestoo primitive to support the wide variety of function forms needed for dealingwith difference equations and their applications, groups can often be foundas invariant substructures of more complex constructs such as vector spaces,rings, and fields.
Being able to reduce the order of a difference equation through a change ofvariables can simplify the analysis of the behaviors of solutions of the equa-tion and in some cases, lead to an explicit formula for the general solution. InChapters 3–7, I propose a systematic method of decomposition for recursivedifference equations that uses a semiconjugate relation between maps. Sincethis relation may exist between functions with different numbers of variables,reductions in order may be formally characterized in terms of the existenceof a semiconjugate relation between functions with non-matching numbers ofvariables. I show how to find the semiconjugate relations, and the accompa-nying factorizations into two difference equations having strictly lower orders,for large classes of difference equations. In particular, in Chapter 7, I showthat nonautonomous, nonhomogeneous linear equations are special members

Preface xi
of a class of nonlinear equations that possess a linear form symmetry; thischange of variables is one of several that are characterized in terms of theinvertibility of a structural mapping of the underlying field.
In Chapter 8, I go beyond semiconjugacy by extending the fundamentalideas based on form symmetries to nonrecursive difference equations. Theseequations cannot be characterized by maps, thus semiconjugate relations donot exist for them. But such equations include the important class of quadraticdifference equations whose solutions collectively exhibit virtually all knowntypes of dynamic behaviors. The reason for this variety is partly becausequadratic difference equations include recursive equations such as linear equa-tions (all types) as well as well-known quadratic recursive equations (e.g., thelogistic map, the Henon map and related higher-order or delay equations)and rational recursive equations containing first-degree polynomials in theirdenominators and polynomials of degree at most two in their numerators.But perhaps far more intriguing are nonrecursive quadratic difference equa-tions whose solution sets may span an enormous range of possible sequences.The nontrivial problem of the existence of real solutions is explored in detailfor nonrecursive equations on the field of real numbers. It may also be men-tioned here that some of the basic results in Chapter 8 may be stated withoutappealing to algebraic structure and may thus be formulated in arbitrary sets.
Background. The main audiences for this book include not only mathe-maticians interested in or researching difference equations but also scientistswho use difference equations for modeling as well as post-graduate and upper-level undergraduate college students. To help extend the reader’s understand-ing of the material I have included a list of several problems as exercises inChapters 2 through 8.
College students majoring in mathematics or science may be able to readand understand most of this book since a rudimentary exposure to modern al-gebra after a calculus sequence should suffice for attaining a basic understand-ing of the main topics. Having completed a first course in differential equa-tions or difference equations will be additionally beneficial in understandingparts of the text. Certainly the greater his or her mathematical background,the more comfortable the reader will feel reading this book, but perhaps themost essential ingredients of all are an open mind to accept new ideas and awillingness to master them.
H. Sedaghat

This page intentionally left blankThis page intentionally left blank

1
Introduction
This short chapter offers a gentle introduction to some of the basic ideas inthis book. For definitions and additional introductory material see Chapter2.
Consider the difference equation
xn+1 = xn +a
xn − xn−1, n = 0, 1, 2 . . . (1.1)
where a is a nonzero real number. This equation has order 2, or is secondorder, because of the difference between the highest index n+1 and the lowestn− 1. Its solution is the sequence of real numbers xn that may be calculatedrecursively from a pair of unequal real numbers x0, x−1 as the index n increasesthrough the non-negative integers. Can we find this solution or determine itsessential properties for all values of n and all unequal initial pairs x0, x−1?
Equation (1.1) has a symmetry in its form that is easy to identify when itis written as
xn+1 − xn =a
xn − xn−1. (1.2)
Setting tn = xn −xn−1 in the right-hand side and tn+1 = xn+1−xn for theleft-hand side (to account for the shift in index n) changes Eq. (1.2) to thesimpler (and first-order) equation
tn+1 =a
tn. (1.3)
The expression xn − xn−1 is an example of what we call an order-reducingform symmetry. This form symmetry also establishes a link between thesecond-order (1.1) and the first-order (1.3) in the following sense: Informationabout each solution {tn} of (1.3) can be translated into information about thecorresponding solution of (1.1) using the equation
xn = xn−1 + tn = xn−2 + t1 + t0 = · · · = x0 +n∑
k=1
tk. (1.4)
In this particular example, if x0 and x−1 are unequal then each solution ofEq. (1.3) is a sequence of numbers tn taking only two possible values:
tn = t0 = x0 − x−1, if n is even
tn =a
t0=
a
x0 − x−1, if n is odd.
1

2 Form Symmetries and Reduction of Order
Thus from (1.4) we obtain the formula
xn =
{x0 + (t0 + a/t0)n/2, if n is evenx0 + a/t0 + (t0 + a/t0) (n− 1)/2, if n is odd
(1.5)
as giving the explicit solution of (1.1). Note that (1.5) completely determinesthe numbers xn for all values of n, x0, x−1.
For more complicated higher order difference equations derivation of explicitsolutions is often either infeasible or of little practical value. But the study ofqualitative behaviors of solutions can be greatly simplified through reductionof order in the above sense. An example of this latter case is the second-orderquadratic equation
xn+1 = (xn − xn−1)2 + xn − a, a > 0 (1.6)
which has the same form symmetry as (1.1) and is reduced by the same changeof variables to
tn+1 = t2n − a. (1.7)
For most positive values of a, the first-order equation (1.7) has no known ex-plicit solutions; however, bifurcations of qualitatively different solutions withchanging values of the parameter a are well-known for (1.7) and such infor-mation together with (1.4) can be used to study the behaviors of solutions of(1.6) qualitatively.
Most difference equations do not have easily identifiable form symmetries as(1.1) or (1.6) do. For instance, form symmetries of the exponential equation
xn+1 = xn−1ea−xn−xn−1 (1.8)
are not obvious. Numerical study indicates that the positive solutions of (1.8)exhibit complex behavior depending on the initial values x0, x−1 even whenwith a fixed value of the parameter a > 4.5. Of course, as seen in (1.6)complexity of behavior is not an indication that reduction of order is difficultor impossible. In fact, we discover a form symmetry for Eq. (1.8) later in thisbook (Section 6.3) and use it to explain the complexity of behavior seen in itssolutions through reduction of order.
As these examples indicate, reducing the order of a difference equation byidentifying and substituting for form symmetries like xn − xn−1 can help an-swer questions about qualitative behaviors of solutions of equations like (1.6)and (1.8) as well as more traditional questions about integrability and theexistence of explicit solutions such as (1.5). Of course, simply finding a recur-rent expression and substituting a new variable for it is not sufficient unless alloccurrences of the old variable can be eliminated. Therefore, it is necessary todetermine ways in which a particular expression or form symmetry can occurin a difference equation so that substituting for it eliminates all occurrencesof the old variable.

Introduction 3
This is often a difficult problem. In this book we use the concept of semi-conjugacy to formulate the problem in a systematic new way. Then using thisnew formalism we obtain order-reduction results for large classes of differenceequations. Semiconjugacy is a relation that can exist between a given func-tion and another one with fewer variables. And being transitive, this relationacquires the character of an ordering relation that formalizes the notion ofreduction in order, say from high to low. For difference equations that aredefined by functions, i.e., recursive equations as in the preceding three ex-amples, the orders of the equations are given by the numbers of variables inthe associated mappings. Therefore, for recursive equations the existence ofa semiconjugate relation implies the existence of form symmetries and thereducibility of order.
For more general, nonrecursive difference equations semiconjugacy cannotbe applied because there is no unfolding map. However, the essential conceptsand ideas developed for recursive equations, including a precise definition ofform symmetry can be extended to nonrecursive equations by a procedurethat does not require the unfolding map. We outline the basics of such ageneral formalism in a separate chapter.
We work largely with difference equations on groups. An apparent reasonfor using groups is that they are algebraic generalizations of real and complexnumbers. A more subtle and compelling reason is that working with groups(and similar abstract structures) enhances the ability to view a differenceequation in different ways. For instance, consider the third-order equation
xn+1 = xn +a(xn − xn−1)
2
xn−1 − xn−2, a 6= 0, x−1 6= x0, x−2 (1.9)
on the set of real numbers. First, as in Eq. (1.1) we make the substitutiontn = xn−xn−1, taking account of the extra time delay in n to get the second-order equation
tn+1 =at2ntn−1
. (1.10)
Since this new equation can be written as
tn+1
tn= a
tntn−1
we notice that substituting a new variable sn for the recurrent expressiontn/tn−1 gives the simple first-order equation
sn+1 = asn.
They may seem different but the two order-reducing substitutions above areclosely related. In fact, they are both instances of the same form symmetrybut in different groups. Both expressions are of type u ∗ v−1 where u, v areelements in the group, ∗ is the group operation and the power −1 denotes

4 Form Symmetries and Reduction of Order
inversion in the group. In the case of xn − xn−1 the underlying group isthe set R of real numbers under addition while for tn/tn−1 we refer to thegroup of all nonzero real numbers under multiplication. We see later that theform symmetry u∗v−1 characterizes a sizable class of homogeneous differenceequations to which both (1.9) and (1.10) belong.
In the remainder of this book we make the aforementioned concepts precise.But our treatment is far from being comprehensive. Reducing the order of anarbitrary difference equation is a nontrivial task and finding order-reducingform symmetries or even just showing that one must exist for a given differenceequation is a generally difficult thing to do. This book aims to show itscommitted readers that in spite of the inherent difficulties, there is a great dealthat can be done. With a reasonable amount of patience and due diligence,the resulting work has its rewards not only by offering a set of ideas andmethods to tackle problems in theory and applications but also by providinga deeper and more comprehensive understanding of difference equations.

2
Difference Equations on Groups
The two difference equations
xn+1 = xn + xn−1 (2.1)
andxn+1 = xnxn−1 (2.2)
are different by some accounts; e.g., the first is linear and the second is not.Thus an explicit formula for the solutions of (2.1) may be found using classicalmethods that are not applicable to (2.2). Yet there are also some similari-ties: the positive solutions of (2.2) are the images of solutions of (2.1) underthe exponential function. Indeed, the exponential function is both a groupisomorphism between all real numbers under addition and all positive realnumbers under multiplication and also a homeomorphism between all realnumbers and all positive real numbers under the usual topology. It followsthat the two equations (2.1) and (2.2) are dynamically equivalent (i.e., theyhave essentially the same solutions) if (2.2) is restricted to the multiplicativegroup of positive real numbers.
These similarities and differences are perhaps best explained by the factthat (2.1) and (2.2) are both special cases of the same equation being definedon different groups. Eq. (2.2) may be defined on still other groups; for ex-ample, on the group of all nonzero real numbers under multiplication where(2.2) and (2.1) are not dynamically equivalent (there are solutions that areessentially different). We explore the idea of difference equations on groups insome detail in this chapter and illustrate the influence of algebraic structureby examples in which equations are defined in exactly the same way but gen-erate different dynamics because the underlying group structures are different(nonisomorphic).
In this and the next five chapters, we discuss explicit or recursive differenceequations on algebraic groups; i.e., difference equations of type
xn+1 = fn(xn, xn−1, . . . , xn−k), n = 0, 1, 2, . . . (2.3)
where k is a fixed non-negative integer and the functions fn : D → G withG a group and D ⊂ Gk+1 a nonempty common domain for all fn. Theseequations are not the most general that may occur but they are importantin modeling applications and have the desirable feature of unfolding to self-maps of Gk+1 that relate order to dimensionality. As a result, solutions of
5

6 Form Symmetries and Reduction of Order
(2.3) can be generated by iteration, a feature that substantially simplifies thediscussions of solutions while also guaranteeing their existence in most casesof interest.
In the final chapter of the book we study general scalar difference equationsfor which there may be no unique explicit or recursive forms globally and theexistence of solutions is not guaranteed by direct iteration because the equa-tions do not unfold to self-maps of a higher dimensional space. Such equationsmay be called implicit or nonrecursive. In spite of difficulties in obtaining in-formation about the solutions of such equations, we discover that essentialideas and methods from Chapters 3–7 on decompositions (or factorizations)of equations and reductions of their orders can be extended to nonrecursiveequations in many cases.
2.1 Basic definitions
The next few definitions introduce basic concepts and terminology pertainingto Eq. (2.3).
DEFINITION 2.1 The order of the difference equation (2.3) is theinteger k + 1, i.e., the difference between the highest order n + 1 and thelowest order n − k in the equation. The independent variable n may alsobe called the time index of (2.3). If fn is time independent, i.e., fn = f forall n ≥ 0 then (2.3) is autonomous; otherwise, (2.3) is nonautonomous.
REMARK 2.1 (Classical operators) In the classical theory of differenceequations on real or complex numbers two basic operators appear frequently.They are the forward shift E and the backward difference ∆, which are definedas follows: If {sn} is a sequence of real or complex numbers then
Esn = sn+1, ∆sn = sn − sn−1.
These concepts readily extend to an arbitrary group G since E is independentof any structure on the underlying set and ∆ takes the form
∆xn = xn ∗ x−1n−1
for every sequence {xn} in G. In an algebraic field F we may define ∆ usingthe additive notation, i.e., ∆xn = xn − xn−1 which is closer to the classicalmeaning. We occasionally refer to these operators in this book, but they donot play a fundamental role in our discussions.

Difference Equations on Groups 7
DEFINITION 2.2 A ( forward) solution of (2.3) is a sequence {xn}∞n=−k
in G that is generated recursively from a given set of initial values (i.v.)
x0, x−1, . . . , x−k ∈ G
by setting n = 0, 1, 2, . . . one step at a time. The plot of points xn versus n issometimes called a time-series plot of the orbit. The solution {xn}∞n=−k isalso a base-space orbit or trajectory of (2.3) in G, the underlying base-space.
A more standard definition of orbit follows Definition 2.3 below.
REMARK 2.2 The preceding definition gives a forward solution sincethe index n only increases. Other concepts of solution are possible. In analogywith ordinary differential equations where solutions are typically defined for alltime (both forward and backward) we may also define solutions of differenceequations as functions on integers Z. In this case, a solution is a “doublyinfinite sequence” {xn}∞n=−∞ in G. The initial values simply define a givenpoint through which the solution passes.
In most applications of difference equations only forward solutions are ofinterest. In order to keep things as simple as possible without loss of signifi-cance, in this book we limit attention to forward solutions and unless statedotherwise, by a “solution” we mean a forward solution.
DEFINITION 2.3 For k ≥ 1 and each n ≥ 0 the unfolding (or vec-toriziation or associated vector map) Fn : D → Gk+1 of fn is definedas
Fn(u0, . . . , uk) = [ fn(u0, . . . , uk), u0, . . . , uk−1].
We refer to the collection of maps {Fn}∞n=0 as the unfolding of Eq. (2.3).The vector (x0, x−1, . . . , x−k) of initial values is the initial state and foreach n ≥ 0 the vector (xn, xn−1, . . . , xn−k) is the state at time n or then-th state. The space Gk+1 is called the state-space of (2.3).
The concept of state-space in Definition 2.3 is analogous to the “phasespace” in differential equations.
Evidently, each solution {xn}∞n=−k of (2.3) in G corresponds uniquely to asolution {Xn} of the first-order equation
Xn+1 = Fn(Xn), X0 = (x0, x−1, . . . , x−k) ∈ D ⊂ Gk+1. (2.4)
Starting from an initial state X0 iteration yields a sequence of states Xn =(xn, xn−1, . . . , xn−k) for n = 0, 1, 2, . . . The sequence {Xn}∞n=0 is an orbit (ortrajectory) of (2.4) in the state-space Gk+1. These are the standard defintionsof orbit (or trajectory) which when k = 1 coincide with the earlier versions inthe base-space G defined above.

8 Form Symmetries and Reduction of Order
A remark about the vector concept may be in order at this stage. Eq. (2.3)is traditionally defined on the real or complex number systems and thereforeit is often called a scalar equation to distinguish it from its vector (or system)version (2.4). In the context of this book this distinction remains importantbut acquires a technical rather than a conceptual flavor since G may itself bea group of finite or infinite dimensional vectors of real or complex numbers.
DEFINITION 2.4 A solution {xn}∞n=−k of (2.3) is eventually periodicwith period p ≥ 1 (or eventually p-periodic) if there is an integer n0 ≥ 0such that xn+p = xn for all n ≥ n0. If n0 = 0 then the solution is periodicwith period p (or p-periodic). If p = 1 then the solution is a constantsolution (eventually if n0 > 0) or a fixed point of (2.3). A fixed point xof (2.3), also sometimes called a point of equilibrium, is a solution of theequation
u = f(u, . . . , u).
A solution that is not eventually periodic is a nonperiodic (or aperiodic)solution.
From this definition and the vector form (2.4) it follows that if a particularstate vector Xq is revisited after p iterations then the sequence of states {Xn}is eventually p-periodic. An immediate consequence of this observation isthat if G is a finite group with m elements then every solution of (2.3) iseventually periodic with period at most mk+1. This is true because there aremk+1 points in the state-space Gk+1 and in at most that many iterations ofthe vector equation (2.4) any initial point in Gk+1 must be revisited.
REMARK 2.3 If a topological structure is present then solutions that arenot periodic but converge to periodic solutions are generally not consideredaperiodic or nonperiodic. They are in fact identified with their limit cycles,a terminology that we use when appropriate.
A function may be defined on a group but its iterations may not be. Hence,there is no guarantee that every initial value leads to a solution of the differ-ence equation in its group. As an extreme example, consider the autonomousfirst-order difference equation
xn+1 =√xn − 1√
xn. (2.5)
Here f(u) = (u− 1)/√u = F (u) is defined on G = (0,∞) which is a group
under ordinary multiplication. However, note that if x0 ∈ (0, 1] then x1 /∈ G;since f(u) < u for all u > 0 it follows that xn+1 < xn for all n. Therefore,every solution of (2.5) is strictly decreasing and eventually negative, then

Difference Equations on Groups 9
complex (or possibly undefined if passing through 1). It follows that Eq.(2.5) has no solutions in the group G = (0,∞) on which it is defined.
The next definition rules out equations like (2.5) and ensures the existenceof solutions in a relevant group.
DEFINITION 2.5 (Invariance) If there is a nonempty subset A ⊂ Gk+1
such that for all n ≥ 0,Fn(A) ⊂ A
where Fn is the unfolding of fn then A is an invariant subset of Gk+1.
Eq. (2.5) with k = 0 has no invariant sets in G = (0,∞). Although withoutinvariance the existence of solutions for (2.3) is not guaranteed, differenceequations of type (2.3) with non-invariant domains do arise in applications.These equations are generally not as bad as Eq. (2.5) and often have nontrivialsolutions in their base-spaces. When considering such equations a key conceptis the following.
DEFINITION 2.6 (Singularity set) Let M be a nonempty set and forfunctions fn : D → M where D ⊂ Mk+1 let Fn be the unfolding of fn foreach n. The singularity set S ⊂ Mk+1 of Eq. (2.3) is the set of all initialstates X0 ∈ D such that for some n0 ≥ 1 (depending on X0)
Fn0◦ Fn0−1 ◦ · · · ◦ F0(X0) /∈ D. (2.6)
The initial states in S may be called singular states (or singular points)in the sense that such points do not generate complete orbits in M.
In the autonomous case, i.e., Fn = F for all n, (2.6) takes the simpler form
F n0(X0) /∈ D
where F n0 is the composition of F with itself n0 times. Note that ifD = Mk+1
then Fn(Mk+1) ⊂ Mk+1. Therefore, Mk+1 is an invariant domain in thiscase and S is empty. Thus a necessary condition for S to be nonempty is thatD 6= Mk+1. In the extreme case of the autonomous Eq. (2.5) where k = 0,we have f = F : (0,∞) → R. Letting D = (0,∞) and M = R, it is evidentthat for every x0 ∈ D there is n0 ≥ 1 such that the iterate F n0(x0) 6∈ D; forexample, if x0 ∈ (0, 1] then n0 = 1. It follows that every point ofD is singular,i.e., S = D.
In Definition 2.6 the set M may have a group structure defined on it thatmay or may not be relevant to the context of a model or a problem. Therefore,it is not necessary that M have any algebraic structure in that definition orthat it retain the algebraic structure of G.
Recall that a binary relation ≤ is a total ordering on a nonempty set T if≤ satisfies the conditions:

10 Form Symmetries and Reduction of Order
(i) u ≤ u for all u ∈ T ;
(ii) u ≤ v and v ≤ u imply that u = v for every u, v ∈ T ;
(iii) u ≤ v and v ≤ w imply that u ≤ w for every u, v, w ∈ T.
DEFINITION 2.7 Let T be an invariant set for Eq. (2.3) that is totallyordered by a relation ≤ . A solution {xn}∞n=−k of (2.3) is eventually non-decreasing (respectively, eventually nonincreasing ) if there is an integern0 ≥ 1 such that n > m ≥ n0 implies xm ≤ xn (respectively, xn ≤ xm).If {xn}∞n=−k is either eventually nondecreasing or eventually nonincreasingthen {xn}∞n=−k is eventually monotonic. If {xn}∞n=−k is not eventuallymonotonic then it is an oscillatory solution of (2.3).
In particular, constant solutions of (2.3) are eventually monotonic as theyare both nondecreasing and nonincreasing while periodic solutions having pe-riods at least two are oscillatory.
2.2 One equation, many interpretations
Let (G, ∗) represent a nontrivial group with its binary operation ∗ and definethe simple, second-order difference equation
xn+1 = xn ∗ xn−1. (2.7)
The unique solution of this equation in G starts out as follows:
{x−1, x0, x0 ∗ x−1, x0 ∗ x−1 ∗ x0, x0 ∗ x−1 ∗ x0 ∗ x0 ∗ x−1, · · ·}
The nature of this sequence depends crucially onG and its binary operation.In special cases, the above solution of (2.7) may have simple, explicit formulas:For instance, if x−1 = x0 then by inspection of the above sequence xn = xϕn
0
where ϕn is the n-th term of the Fibonacci sequence (see Example 2.1 below).However, a little reflection should convince the reader that a general formulafor expressing all solutions of (2.7) on an arbitrary group does not exist.Indeed, even the special solution xn = xϕn
0 that starts on the diagonal in thestate-space may have a complicated nature depending on the group G; seeExample 2.4 below. Thus, the role of G in shaping the solutions of (2.7) isimportant and needs to be carefully examined.
To gain further insight into this matter, in this section we examine (2.7)on a few specific groups. Changing the group structure while keeping theequation’s form fixed leads to a new and deeper understanding of differenceequations and their solutions on groups.

Difference Equations on Groups 11
Example 2.1
Let G be the set of all real numbers R and let ∗ be the ordinary addition ofreal numbers. Then (2.7) takes the form
xn+1 = xn + xn−1. (2.8)
We may refer to Eq. (2.8) as the Fibonacci difference equation since thefamous “Fibonacci sequence”
{ϕn}∞n=−1 = {1, 1, 2, 3, 5, 8, 13, 21, . . .} (2.9)
is, by its definition, a solution of (2.8) with initial values x0 = x−1 = 1. Anexplicit formula for the general solution of the linear equation (2.8) is easilyobtained by familiar, classical methods as
xn = C1
(1 +
√5
2
)n
+ C2
(1 −
√5
2
)n
(2.10)
where the constants C1, C2 are determined by the initial values x0, x1 in thecustomary way (linear difference equations are discussed in detail later in thisbook). Using (2.10) we can quickly determine the nature of all solutions of(2.8) in R. In particular, since −1 < (1 −
√5)/2 < 0 it is evident that for
sufficiently large n, the terms xn are essentially proportional to the domi-nant exponential term whose base (1 +
√5)/2 (known as the “golden ratio”
) is greater than 1. In particular, the solutions of (2.8) are all eventuallymonotonic.
An interesting feature of Eq. (2.8) is that if the initial values are in asubgroup of (R,+), e.g., the rationals (Q,+) or the integers (Z,+), then soare xn for all n ≥ 1. For example, all terms of the Fibonacci sequence aboveare integers since x0 = x−1 = 1. Therefore, formula (2.10) which involvesirrational real numbers such as the golden ratio produces only integers orrationals depending on the initial values. Later in this book, by studyinggeneral linear difference equations on arbitrary fields in sufficient depth wediscover a general formula for solutions of (2.8) that does not involve irrationalnumbers; i.e., a formula that exists in Q, itself a field under ordinary additionand multiplication; see Example 7.4 in Chapter 7.
Finally, we point out that Eq. (2.8) has invariant sets in R that are notsubgroups; e.g., intervals of type [r,∞) for all r ≥ 0 or intervals (−∞, s] fors ≤ 0.
A slight generalization of the preceding example is the following.
Example 2.2
Let G be the vector space Rm of all vectors with m real components underthe usual component-wise vector addition. The difference equation (2.7) takesthe form
vn+1 = vn + vn−1. (2.11)

12 Form Symmetries and Reduction of Order
This equation can also be written equivalently as a system of m Fibonaccicomponent equations
vi,n+1 = vi,n + vi,n−1, i = 1, 2, . . . , m.
Since each component equation is independent of the others, the solutions of(2.11) consist of vectors whose components are determined by (2.10).
In the next example, we examine (2.7) on a different group and discover adifferent behavior.
Example 2.3
Consider the group of all nonzero real numbers R0 under ordinary multipli-cation. Then (2.7) takes the form
xn+1 = xnxn−1. (2.12)
A formula for the general solution of (2.12) on R0 is obtained by straight-forward iteration as
xn = xϕn−1
0 xϕn−2
−1 (2.13)
where ϕn is the Fibonacci sequence (2.9) for n ≥ 1 and its value for every nmay be calculated from (2.10). Note that formula (2.13) remains valid withthe inclusion of zero; therefore, it gives all solutions of (2.12) in R not justR0.
It is clear from (2.13) that the behavior of solutions of (2.12), namely, Eq.(2.7) on R0 under multiplication is qualitatively different from that of (2.8)on R under addition. For example, if x−1 = 1 and x0 = −a where a > 0 thenby (2.13) the corresponding solution of (2.12):
xn = (−a)ϕn−1
is oscillatory; further, {xn} is bounded if a ≤ 1 and unbounded if a > 1. Thesepatterns are not exhibited by the eventually monotonic solutions of Eq. (2.8).
As in Example 2.1, there are invariant sets that are not groups. For exam-ple, the interval [−1, 1] is not a subgroup of R0 but it is an invariant subset ofR under Eq. (2.12) because |x0x−1| ≤ 1 implies |xn| ≤ 1 for all n. Since both(2.12) and its general solution (2.13) are defined at zero, it follows that thebehaviors of solutions in [−1, 1] can be determined using arguments similar tothe preceding discussion. For instance, if |x0x−1| < 1 then it is evident from(2.13) that xn → 0 as n → ∞. If furthermore, x0, x−1 > 0 then the solutiondecreases monotonically to zero.
It may be worth mentioning that the nonlinear equation (2.12) in Example2.3 may behave like the linear equation (2.8) in Example 2.1 under certainrestrictions. In the multiplicative subgroup (0,∞) of R0, x0, x−1 > 0 so

Difference Equations on Groups 13
xn > 0 for all n; i.e., the subgroup (0,∞) is invariant under (2.12). Thechange of variables xn = eyn under the real exponential function transforms(2.12) into the equivalent additive form (2.8) from which an explicit formulafor xn can be easily obtained using (2.10). This similarity of behavior is areflection of the fact that the the additive group R and the multiplicative group(0,∞) are algebraically isomorphic under the real exponential function andthe unfoldings of (2.8) and (2.12) are topologically equivalent (or “conjugate”)via the homeomorphism H : R2 → (0,∞)2 defined as H(u, v) = [eu, ev].
In the next example we discuss equation (2.7) in yet another group anddiscover a new solution set that is different from those in the preceding twoexamples.
Example 2.4
(The circle group) Consider the unit circle T = {z ∈ C : |z| = 1} in thecomplex plane. Since |zw| = |z||w| = 1 for every z, w ∈ T, it follows that T
is closed under the ordinary multiplication of complex numbers. Therefore, T
forms a multiplicative subgroup of C. Now we consider Eq. (2.12) on T i.e.,
zn+1 = znzn−1, z0, z−1 ∈ T. (2.14)
The solutions of (2.14) satisfy a formula of type (2.13) upon iteration, yetthey are qualitatively different from solutions of either (2.8) or (2.12). Forinstance, all solutions of (2.14) are bounded because they are in T; in fact,every term of each solution has modulus 1. Clearly, this is not the case for allsolutions of (2.12) or (2.8). More precisely, given that T can be representedin polar form as
T = {eiθ = cos θ + i sin θ : 0 ≤ θ < 2π},
formula (2.13) for T may be written in the following more descriptive form
zn = zϕn−1
0 zϕn−2
−1
= ei(θ0ϕn−1+θ−1ϕn−2)
= cos(θ0ϕn−1 + θ−1ϕn−2) + i sin(θ0ϕn−1 + θ−1ϕn−2)
with eiθ0 = z0 and eiθ−1 = z−1. In the above form we see that the behaviorsof solutions of (2.14) are clearly different (and more complicated) than thoseof (2.8) or (2.12). To illustrate further, let z−1 = z0 = eiθ0 and recall thatϕn−1 + ϕn−2 = ϕn for all n to obtain
zn = cos(θ0ϕn) + i sin(θ0ϕn). (2.15)
If θ0 = jπ/2 where j is any given integer then using the regular occurrenceof even numbers among ϕn we can show that {zn} is periodic with period 6;this can be also verified by iterating (2.14) with all possible initial values
z0 = eiθ0 = eiπj/2 = ij ∈ {±1,±i}.

14 Form Symmetries and Reduction of Order
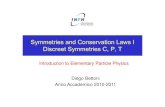
FIGURE 2.1
Values of the arguments θn with θ0 = θ−1 = π/4 showing a periodic solution.
Figure 2.1 shows a plot of arguments of the state-space orbit with z0 =(1 + i)/
√2 or θ0 = π/4.
Examination of Figure 2.1 indicates that the trajectory has period 12. Aplot of the trajectory in state-space is shown in Figure 2.2. Some states inthis figure (seen as dots on the unit circle) are visited more than once so thereare fewer than 12 distinct states. The manner in which the states in Figure2.2 are traversed can be inferred from Figure 2.1.
Other values of θ0, including irrational multiples of π may generate solu-tions {zn} in (2.15) that are oscillatory but nonperiodic, or aperiodic, inT. See Figures 2.3 and 2.4 in which a numerically generated solution withslightly different initial values is nonperiodic. Such a behavior is clearly morecomplicated than what occurs in Example 2.1 or in Example 2.3.
We may write Eq. (2.14) in polar form as
eiθn+1 = eiθn+iθn−1 , eiθn+j = zj , j = −1, 0, 1.
In this form an additive equation is apparent in exponents that is modulo2π; i.e.,
θn+1 = (θn + θn−1)mod2π. (2.16)
Refer to the Problems for this chapter for a look at the solutions of (2.14) inthe set of all complex numbers. In this context we find interesting relationshipsbetween ideas discussed in Examples 2.1, 2.3 and 2.4.
Addition modulo a positive number also appears in the next example whichgives yet another incarnation of Eq. (2.7).

Difference Equations on Groups 15
FIGURE 2.2
The periodic state-space orbit zn on the unit circle withz0 = z−1 = (1 + i)/
√2 or θ0 = θ−1 = π/4.
FIGURE 2.3
Values of the arguments θn with θ0 = θ−1 = π/3 showing a nonperiodicsolution.

16 Form Symmetries and Reduction of Order
FIGURE 2.4
The nonperiodic state-space orbit zn on the unit circle withz0 = z−1 = (1 + i)/
√2 or θ0 = θ−1 = π/3.
Example 2.5
Consider the group Zm = {0, 1, . . . , m−1} for each fixed integer m ≥ 2 wherethe operation in Zm is addition modulo m, i.e.,
i ∗ j = (i+ j)modm.
Here kmodm is the remainder of the quotient k/m for all k = 0, 1, 2, . . .Clearly Zm is commutative for each m and the inverse of 1 in Zm is m − 1,the inverse of 2 is m − 2, etc. If m is even then the element m/2 is its owninverse. Eq. (2.7) on Zm takes the form
xn+1 = xn ∗ xn−1 = (xn + xn−1)modm. (2.17)
Given that Zm is finite and the state-space of (2.17) hasm2 elements, it followsthat all solutions of (2.17) are periodic with period at most m2. The solutionsof (2.17) are therefore qualitatively different from the perviously seen versionsof (2.7) in Examples 2.1, 2.3 and 2.4.
Despite their simple natures, the solution sets of (2.17) are not easy to char-acterize for arbitrary m. To illustrate, consider the analog of the Fibonaccisequence in Zm. With the usual initial values x0 = x−1 = 1 but with differentvalues of m, “Fibonacci sequences” of different periods are generated by trun-cating the actual Fibonacci sequence, modulo m. The following table lists theperiods of Fibonacci sequences modulo m for the first 25 values of m. Notethe significant variations in periods as m changes:

Difference Equations on Groups 17
m 2 3 4 5 6 7 8 9 10 11 12 13Period 3 8 6 20 24 16 12 24 60 10 24 28
m 14 15 16 17 18 19 20 21 22 23 24 25Period 48 40 24 36 24 18 60 16 30 48 24 100
In all of the preceding equations, the groups involved are commutative. Inthe next example we consider (2.7) on a noncommutative group.
Example 2.6
(Matrix groups) The collectionM of allm×m matrices A with real entries anddeterminants detA = 1 is a group under the usual multiplication of matrices.On M (2.7) is the matrix difference equation
An+1 = AnAn−1, A0, A−1 ∈M. (2.18)
If m ≥ 2 then M is noncommutative and therefore, solutions of (2.18)are again qualitatively different from those seen in previous examples. Forinstance, if A0A−1 6= A−1A0 then switching the values of A0 and A−1 gen-erates two different solutions of (2.18), a situation that did not occur in thecommutative settings of the previous examples.
The next two examples look at functional interpretations of (2.7).
Example 2.7
(Groups of self-maps of a group) Let G0 be a nontrivial group.(a) If G0 is commutative then certain sets of self-maps φ : G0 → G0 form
commutative groups under the usual pointwise addition of functions
(φ1 + φ2)(u) = φ1(u) + φ2(u) for all u ∈ G0
where as long as there is no confusion we use the same symbol + for both theoperation in G0 and that defined among functions on G0. Now let G be anynontrivial group of self-maps of G0. Then Eq. (2.7) takes the following formin G
φn+1 = φn + φn−1
which is a generalization of the Fibonacci difference equation (2.8). Thisfunctional equation can be extended as follows: For every φ ∈ G and positiveinteger m define
mφ = φ+ · · ·+ φ, φ is added m times.
We may also define mφ = (−m)(−φ) for m < 0 and mφ = 0 (i.e., the zerofunction, which is the identity of G) if m = 0. So the following equation makessense on G:
φn+1 = pφn + qφn−1, p, q ∈ Z, φ0, φ−1 ∈ G. (2.19)

18 Form Symmetries and Reduction of Order
Example 2.8
(Groups of bijections of a set) Let M be a nonempty set. It is not hard toverify that the collection G of all bijections of M is a group under functioncomposition. If G is any nontrivial subgroup of G then Eq. (2.7) takes thefollowing form as a functional difference equation
φn+1 = φn ◦ φn−1. (2.20)
Well-known examples of groups of bijections include groups of permutationsof a finite set. For instance, If M = {a, b, c} is a set of three distinct elementsthen the noncommutative group G of all permutations (or bijections) of Mconsists of the following six self-maps
σ0 : a→ a, b→ b, c→ c σ1 : a → a, b→ c, c→ b
σ2 : a→ c, b→ b, c→ a σ3 : a → b, b→ a, c→ c
σ4 : a→ b, b→ c, c→ a σ5 : a → c, b→ a, c→ b.
Note that σ0 is the identity of G and σ−1i = σi for i = 1, 2, 3 while σ4 and
σ5 are inverses of each other. Since G is finite we expect that all solutionsof (2.20) are periodic with period at most 62 = 36. Solutions with differentperiods occur; for instance, if φ−1 = σ0 and φ0 = σ4 then we obtain thefollowing solution
{σ0, σ4, σ4, σ5, σ0, σ5, σ5, σ4, σ0, σ4, . . .}
which has period 8; we leave the details of calculation to the reader in theProblems for this chapter. Similarly, φ−1 = σ1 and φ0 = σ2 give the solution
{σ1, σ2, σ5, σ3, σ2, σ4, σ1, σ2, . . .}
which has period 6.
Examples 2.1–2.8 show that when defining a difference equation by algebraicoperations, the nature of solution set of the equation depends critically notonly on the specific manner in which the equation is defined but also onthe underlying algebraic structure. If a result is obtained for a differenceequation that is defined on a general group then such a result is valid for allinterpretations of the group. In this book we often obtain reductions of ordersfor such generally defined difference equations, usually on groups and fields,by looking for symmetries in forms that make up a difference equation suchas (2.7).

Difference Equations on Groups 19
2.3 Examples of difference equations on groups
Having discussed different interpretations of a single difference equation onvarious groups, we now turn to a discussion of different types of differenceequations on groups in order to illustrate more of the basic definitions andconcepts introduced in Section 2.1.
The first example discusses a difference equation whose solution on an ar-bitrary commutative group is easy to obtain. The utility of having such ageneral solution is indicated in the remarks after the example.
Example 2.9
Let (G, ∗) be an arbitrary commutative group and consider the differenceequation
xn+1 = a ∗ xn ∗ x−1n−1 (2.21)
where a is a fixed element of G and the power −1 denotes group inversion.For arbitrary parameter values a, x0, x−1 let us calculate the first few termsof the general solution:
x1 = a ∗ x0 ∗ x−1−1, x2 = a ∗ x1 ∗ x−1
0 = a2 ∗ x−1−1,
x3 = a ∗ x2 ∗ x−11 = a2 ∗ x−1
0 , x4 = a ∗ x3 ∗ x−12 = a ∗ x−1
0 ∗ x−1,
x5 = a ∗ x4 ∗ x−13 = x−1, x6 = a ∗ x5 ∗ x−1
4 = x0.
From the above calculation it is evident that the 6-step pattern repeatsand results in a solution of period 6. This result is valid on any commutativegroup.
In particular, the above calculation is valid in the specific group of all realnumbers under addition. In this group (2.21) is the nonhomogeneous linearequation
xn+1 = a+ xn − xn−1, a, x0, x−1 ∈ R (2.22)
whose solutions are sequences of period 6 as follows
{x−1, x0, a+ x0 − x−1, 2a− x−1, 2a− x0, a− x0 + x−1, x−1, x0, · · · }.
In certain additive groups the solution may have a smaller minimal period.For example, in the group Z2 = {0, 1} with addition modulo 2 the solutionreduces to
{x−1, x0, a+ x0 − x−1, x−1, x0, . . .}whose minimal period is at most three (note that 2 = 0 and ±1 = 1 in Z2).
Next, let G be any nontrivial subgroup of nonzero complex numbers underordinary multiplication (e.g., R0 or T) and obtain the equation
xn+1 =axn
xn−1, a, x0, x−1 ∈ G. (2.23)

20 Form Symmetries and Reduction of Order
Solutions of (2.23) are the following sequences of period 6
{x−1, x0,
ax0
x−1,a2
x−1,a2
x0,ax−1
x0, x−1, x0, · · ·
}.
REMARK 2.41. While the approach in Example 2.9 is the quickest way of obtaining
the general solution of the nonhomogeneous linear equation (2.22), we canalso obtain this solution using the classical theory of linear equations. Theeigenvalues of the homogeneous part of Eq. (2.22) are complex
λ± =1
2± i
√3
2= cos
π
3± i sin
π
3= e±iπ/3.
Since λ6± = 1 the complementary solution has period 6 and the general solu-
tion can be obtained using standard methods, e.g., undetermined coefficients.2. When G = T , the circle group, then Eq. (2.23) can be written in polar
form asθn+1 = (θn − θn−1 + α)mod2π, eiα = a. (2.24)
If a sequence of real numbers {θn}∞n=−1 satisfies (2.24) then the sequence{zn}∞n=−1 in T defined by zn = eiθn evidently satisfies Eq. (2.23) in T (recallthat e2πmi = 1 for all integers m). Since by Example 2.9 every solution of(2.23) has period 6, it follows that all solutions of Eq. (2.24) are also periodicwith period 6.
The above relationship between equations on R modulo 2π and equationson T can be extended to the following more general
θn+1 = (aθn + bθn−1 + c)mod 2π, a, b, c, θ−1, θ0 ∈ R (2.25)
which can be viewed as the polar form of the following equation on T
zn+1 = γzanz
bn−1, γ = eic, zn = eiθn . (2.26)
Note that Eq. (2.16) following Example 2.4 is another special case of (2.25).The Problems for this chapter further explore the relationship between (2.25)and (2.26). Eq. (2.26) is a special case of a general class of equations on C
that we study in some detail in Section 6.3 below.
Other simple equations similar to (2.21) exist on groups that can be solvedgenerally; see the Problems for this chapter.
If G is not commutative then the calculations of the preceding example arenot valid and different solutions may exist. Solutions of period 6 may stilloccur if a, x0, x−1 are all in a nontrivial commutative subgroup of G. See theProblems for this chapter.

Difference Equations on Groups 21
Often when using difference equations in modeling applications, a givenequation is proposed on a suitable set without regard to any algebraic struc-ture that may exist on the set. In such cases, it may be necessary to accountfor singularity sets, if any. The next example provides a simple illustration.
Example 2.10
Consider the difference equation of order k + 1 defined as
xn+1 =anxn
xn−k, an, x0, x−1, . . . , x−k ∈ R, an 6= 0 for all n. (2.27)
If all of the initial values are nonzero then x1 6= 0 and thus by inductionxn 6= 0 for all n. Conversely, if xm = 0 for some least integer m then eitherm ≤ 0 or am−1xm−1 = 0. But this implies xm−1 = 0 which contradicts theassumption that m is the least index for a zero term. Thus m ≤ 0. Theseobservations show that the only singular values or states of (2.27) occur onthe coordinate hyperplanes, i.e.,
S = {0} × Rk ∪ R×{0} × Rk−1 ∪ · · · ∪ Rk × {0} ⊂ Rk+1
which form an invariant subset of Rk+1. With regard to algebraic structures,although the set R has a natural additive group structure, in this exampleEq. (2.27) is multiplicative in nature so the relevant algebraic structure is themultiplicative group R0. Since Rk+1
0 ∪S = Rk+1 the nonsingular solutions areprecisely those that are in the multiplicative group R0. We also note that if
Fn(u0, . . . , uk) =
[anu0
uk, u0, u1, . . . , uk−1
]
is the unfolding for Eq. (2.27) then Fn(Rk+10 ) = Rk+1
0 so in particular, Rk+10
is invariant under every Fn.
Often an invariant set of interest for a difference equation is a subset ofsome relevant group for the equation as seen in the next example.
Example 2.11
The difference equation
xn+1 = xn−1ean−xn−xn−1 , an, x0, x−1 ∈ R (2.28)
is used in biological models; see the Notes section of this chapter. Althoughthis equation is well defined on R the invariant subset of interest for modelingis clearly (0,∞), a subgroup of the group R0 of nonzero real numbers underordinary multiplication (which is also invariant). Indeed, all occurrences ofaddition can be removed from the right-hand side using the exponent prop-erties:
xn+1 = xn−1ean(1/exn)(1/exn−1 )

22 Form Symmetries and Reduction of Order
i.e., Eq. (2.28) can be defined using the group multiplication only. Becauseof their boundedness and complexity, the behavior of solutions of (2.28) onthe invariant subgroup (0,∞) is much more interesting than solutions startingoutside this group. A detailed analysis of this equation is given in Section 6.3below.
Although multiplicative groups in R were natural choices to consider asalgebraic structures in the preceding example, it should be mentioned thatthe definition of the exponential function requires the usual (Euclidean) topo-logical structure of R as well as its algebraic field structure, features thatare implicitly assumed in defining the difference equation and can play subtleroles. For instance, use of the exponential function effectively prevents groupsof rational numbers from being relevant or invariant in this example.
In many applications a difference equation is defined using more than asingle group operation as we saw in Example 2.11. The examples in thissection involve algebraic fields on which certain important types of differenceequations can be defined.
Example 2.12
Let F be an algebraic field with its two operations denoted as usual by theaddition and multiplication symbols. If
aj,n, bn ∈ F for j = 0, 1, . . . , k and all n ≥ 0
then the difference equation
xn+1 = a0,nxn + a1,nxn−1 + · · ·+ ak,nxn−k + bn (2.29)
is the general linear nonhomogeneous difference equation of order k + 1 in Fprovided that ak,n 6= 0 for all n. Eq. (2.29) has of course been extensivelystudied on the fields R and C. However, there are other algebraic fields such asfinite fields Zp of integers modulo a prime p ≥ 2 on which linear equations havenot been studied extensively. Our study of decompositions (or factorizations)and reductions of orders of linear equations in this book takes all algebraicfields into account.
A linear form such as (2.29) can be defined on weaker algebraic structuressuch as rings but noncommutativity and the existence of zero divisors addcomplications that are not characteristically associated with linear equations.For example, even in a division ring (or a noncommutative field) we need todistinguish between aj,nxn−j and xn−jaj,n when defining a linear equation.In this first book on the topic, we limit attention to fields so as to avoid suchcomplications.
Example 2.13
Extending the idea in Example 2.12, polynomial and rational difference equa-

Difference Equations on Groups 23
tions can also be defined on fields. In particular, consider the following typesof rational equations
xn+1 =α0,nxn + α1,nxn−1 + · · ·+ αk,nxn−k + βn
A0,nxn + A1,nxn−1 + · · ·+ Ak,nxn−k + Bn(2.30)
and
xn+1 =α0,nxn + · · ·+ αk,nxn−k + βn
A0,nxn + · · ·+ Ak,nxn−k +Bn+a0,nxn + · · ·+ak,nxn−k +bn (2.31)
where aj,n, αj,n, Aj,n, bn, βn, Bn ∈ F for j = 0, 1, . . . , k and n ≥ 0. For nontriv-iality, it may be assumed in these equations that αk,nAj,n 6= 0 or αj,nAk,n 6= 0for some j ≤ k and all n. Eq. (2.27) in Example 2.10 is a special case of (2.30).
Eqs.(2.30) and (2.31) with all coefficients in the field R of all real numbersappear often in pure and applied literature in difference equations; see theNotes section of this section. We refer to Eq. (2.30) as the Ladas rationaldifference equation in recognition of the pioneering work on these types ofequations by G. Ladas and colleagues. Both Ladas difference equations andequations such as (2.31) are examples of quadratic difference equations; seeSection 8.4. We refer to Eq. (2.31) as a quadratic-linear rational differenceequation. This type of equation is capable of generating complex (includingchaotic) solutions even in the autonomous case, i.e., with all coefficients beingconstants. We discuss one such example later in this book; see Section 5.6.5.
In studying rational equations it may be necessary to determine the singu-larity sets; i.e., sets of initial values that after a finite number of iterations leadto the occurrence of a zero in the denominator. Singularity sets of arbitraryrational equations are difficult to determine; however, in many applicationsthey can be avoided without loss of significance. For example, if all the co-efficients and parameters αj,n, Aj,n, bn, Bn are positive then all solutions of(2.30) with positive initial values are nonsingular. Positive solutions are oftenwhat are sought in modeling applications so that we can stay safely away fromsingularities. Further, positive solutions are in the interval (0,∞), which hasa natural multiplicative group structure inherited from the field structure ofR.
In implicit form (if both sides of each is multiplied by the expression in thedenominator) both of the equations (2.30) and (2.31) are examples of quadraticequations. Later in this book we study quadratic difference equations on fieldsas natural extensions of linear equations.
Example 2.14
Let F be a nontrivial field. The following equation
xn+1 =xn + a
xn−1, a, x0, x−1 ∈ F (2.32)
is a second-order special case of (2.30) that is commonly known as the “Lynessequation” in the case F =R. In this case, the properties of real solutions

24 Form Symmetries and Reduction of Order
of (2.32) have been determined in some detail. If a, x0, x−1 > 0 then thesingularity set of (2.32) is clearly avoided. Further, it can be checked bydirect calculation that every solution of (2.32) lies on the curve
(a+ xn + xn−1)
(1 +
1
xn
)(1 +
1
xn−1
)= c(x0, x−1)
that is known as an “invariant” for the Lyness equation (the constant c(x0, x−1)depends on the initial values and of course, on a). Invariants are discussed inSection 3.1 below.
We note that if a = 0 then (2.32) reduces to a special case of Eq. (2.23); seeExample 2.9. In this example, we focus on the oldest known nondegeneratecase a = 1, i.e., the equation
xn+1 =xn + 1
xn−1. (2.33)
In this case, every nonconstant real solution of (2.32) with positive initialvalues has period 5 as a quick calculation demonstrates
{x−1, x0,
x0 + 1
x−1,x0 + x−1 + 1
x0x−1,x−1 + 1
x0, x−1, x0, . . .
}.
Eq. (2.32) has a positive fixed point in R given by none other than the goldenratio
x =1 +
√5
2.
As usual this is calculated by setting xn+1 = xn = xn−1 = x in (2.33)and solving the resulting quadratic equation for its positive solution. Thus ifx0 = x−1 = x then the corresponding solution of (2.32) is constant at x. It isnoteworthy that if x0, x−1 are both rational (and positive) then every solutionof (2.33) is rational so that in the field Q the solutions behave in essentiallythe same way as they do in R with one interesting exception: There are noconstant solutions in Q since x is irrational. Therefore, in Q every positivesolution of (2.33) has period 5, as calculated above.
In very different fields, however, the nature of solutions changes signifi-cantly. For example, it is easy to see by direct calculation that (2.33) has nosolutions in the finite fields Z2 and Z3 because in each of these the solutionsbecome zero in a few steps; i.e., the singularity sets of (2.33) of these fieldsare Z2
2 and Z23, respectively. The field Z5 is more interesting; the solutions of
(2.33) for various initial points (x0, x−1) in Z5 fall into two main categoriesthat are listed below:
5-cycle (1, 1), (2, 1), (1, 2), (3, 2), (2, 3), (3, 3)Singularity (2, 2), (3, 1), (1, 3), (x0, 0), (0, x−1), (x0, 4), (4, x−1)

Difference Equations on Groups 25
We give the calculations for some of these and leave the verifications of therest to the reader. If (x0, x−1) = (2, 1) then
x1 =2 + 1
1= 3, x2 =
3 + 1
2= 2, x3 = 1, x4 = 1, x5 = 2
so that the solution has period 5 or is the 5-cycle
{1, 2, 3, 2, 1, 1, 2, . . .}.
If (x0, x−1) = (2, 2) then
x1 =2 + 1
2=
3
2, x2 =
3/2 + 1
2=
5
4= 0
so that (2,2) is in the singularity set. The actual value of 3/2 in Z5 is foundas follows
3
2=
3
2(1) =
3
2(6) = 9 = 4 + 5 = 4.
Changing the rationals to actual values is not always necessary as the pre-ceding calculation for (2,2) indicates but in some cases it is important to knowthe actual values. For instance, if (x0, x−1) = (3, 3) then
x1 =3 + 1
3=
4
3=
4
3(6) = 8 = 5 + 3 = 3, x2 =
3 + 1
3= 3, . . .
i.e., 3 is in fact a fixed point of (2.33) in Z5! This 5-cycle has minimal period1 (constant solution) unlike the other 5-cycles listed in the above table. Thusthe solutions of (2.33) in Z5 to some extent resemble the positive solutions inR in their variety. However, a different conculsion holds if a 6= 1; for a furtherexploration of the Lyness equation on the fields Zp see the problems below.
The next example shows that by using matrices as operators on finite orinfinite dimensional vector spaces we may represent certain types of partialdifference equations as difference equations on groups. Partial difference equa-tions are encountered in many different contexts, including numerical solutionsof differential equations and cellular automata.
Example 2.15
(Vector spaces and partial difference equations on groups ) Let F be a nontriv-ial field and let F0 = F\{0} be the group of units of F under multiplication.Then the set of all sequences in F0
FN
0 = {(u1, u2, u3, . . .)> : uj ∈ F0, j = 1, 2, 3, . . .}
is again a group (the direct product) under pointwise multiplication (we havestretched the vector notation and terminology to include sequences; the sym-bol > denotes transposition). Let G be a nontrivial subgroup of FN
0 . Define

26 Form Symmetries and Reduction of Order
the matrix A = (ai j)∞i,j=1 where aj, j+1 = 1 (the identity of F0) and ai j = 0
otherwise; i.e.,
A =
0 1 0 0 00 0 1 0 0 · · ·0 0 0 1 0
.... . .
.
Given two initial vector values xi = (xi,1, xi,2, . . .)> in G for i = −1, 0 we
define for each integer n ≥ 0
xn+1 = (Axn)x−1n−1 (2.34)
where for convenience we used ordinary multiplication symbol and where theinverse of each sequence (u1, u2, . . .)
> ∈ G is simply the sequence of inverseterms (u−1
1 , u−12 , . . .)>. Notice that the parentheses are required in (2.34) as
A(xnx−1n−1) has a different meaning.
We now consider writing the vector equation (2.34) in component form.First, for every n
Axn =
x2,n
x3,n
...
and by the definition of multiplication in FN0 we obtain
xj,n+1 = xj+1,nx−1j,n−1, j = 1, 2, 3, . . . (2.35)
Unlike the system of equations in Example 2.2, Eqs.(2.35) are not indepen-dent of each other and there are infinitely many of them. They may be viewedas having two independent variables, j and n and as such, (2.35) are consid-ered to be a single partial difference equation. The variable j is analogousto the space variable in a partial differential equation. We see that the ordi-nary, autonomous vector difference equation (2.34) on the infinite-dimensionalproduct group FN
0 is equivalent to the partial difference equation (2.35).A solution of (2.35) may be listed in matrix form as follows:
x1,1 = x2,0x−11,−1 x2,1 = x3,0x
−12,−1 x3,1 = x4,0x
−13,−1 · · ·
x1,2 = x2,1x−11,0 x2,2 = x3,1x
−12,0 x3,2 = x4,1x
−13,0 · · ·
x1,1 = x2,2x−11,1 x2,3 = x3,2x
−12,1 x3,3 = x4,2x
−13,1 · · ·
......
.... . .
We leave it to the reader to verify that n-th row above represents the termx>n in the solution of (2.34) corresponding to the given vector initial values.
In the next example we determine the vector analog of a linear partialdifference equation.

Difference Equations on Groups 27
Example 2.16
(A linear partial difference equation) Let F be a nontrivial field and let
αj,n, βj,n, γj,n, δj,n, n ≥ 0, j ≥ 1
be given sequences in F . The partial difference equation
xj,n+1 = αj,nxj−1,n + βj,nxj,n + γj,nxj,n−1 + δj,nxj+1,n−1 (2.36)
is an example of a linear partial difference equations with variable coefficientsthat depend on both the “time” variable n and the “space” variable j. Wenow determine the vector difference equation corresponding to (2.36). As inExample 2.15 denote the set of all sequences in F by FN. Since two time levelsare involved in (2.36) we seek an equation of type
xn+1 = Anxn +Bnxn−1, xn ∈ FN for all n ≥ 0.
To find the matrix sequence An we pair the first two terms on the righthand side of (2.36) together since they both have the time index n. Similarly,Bn is found by pairing the terms with time index n−1. By direct examinationof the pattern of indices in (2.36) we determine that
An = (ai jn)∞i,j=1 where aj jn = βj,n, aj+1, j,n = αj,n, aj jn = 0 otherwise;
Bn = (bi jn)∞i,j=1 where bj jn = γj,n, bj+1, j,n = δj,n, bj jn = 0 otherwise;
i.e.,
An =
β1,n 0 0 0α2,n β2,n 0 0 · · ·0 α3,n β3,n 0
.... . .
and
Bn =
γ1,n δ1,n 0 00 γ2,n δ2,n 0 · · ·0 0 γ3,n δ3,n
.... . .
.
Certain types of partial difference equations known as “cellular automata”are often used in modeling discrete dynamical systems. The next examplefeatures this type of equation and the set-up behind it.
Example 2.17
Let F be the binary field Z2 and similarly to preceding examples, denote byZZ
2 the set of all doubly infinite sequences of 0’s and 1’s, i.e.,
ZZ
2 = {(. . . , u−1, u0, u1, . . .)> : uj ∈ Z2 for all j ∈ Z}.

28 Form Symmetries and Reduction of Order
The partial difference equation
xj,n+1 = ψ(xj−1,n, xj,n, xj+1,n)
where ψ : Z32 → Z2 is a given function defines a “one-dimensional, 3-point
cellular automata (CA).” The function ψ defines a 3-point or 3-input “neigh-borhood rule,” which determines whether cell j is active at time n + 1 (i.e.,xj,n+1 = 1) or inactive (xj,n+1 = 0) depending on the activity status of cellj and its immediate neighbors at time n. There are eight points in Z3
2 andthus 28 = 256 possible definitions for ψ. Clearly this idea can be extended tom-point CA for all integers m ≥ 1 by defining functions on Zm
2 .Certain choices of ψ can be represented by vector difference equations on
ZZ2 . For instance, it is readily verified that the linear partial difference equation
xj,n+1 = xj−1,n + xj,n + xj+1,n (2.37)
is represented by the linear, autonomous first-order vector difference equation
xn+1 = Axn
where A = (ai j)∞i,j=−∞ with aj−1, j = ajj = aj+1, j = 1 and ai j = 0 otherwise;
i.e.,
A =
. . ....
...· · · 0 1 1 1 0 0 · · ·· · · 0 0 1 1 1 0 · · ·
......
. . .
, xn =
...x0,n
x1,n
...
.
Eq. (2.37) can be more pictorially (and conventionally in CA terms) statedas a CA “rule”
000 001 010 011 100 101 110 1110 1 1 0 1 0 0 1
In the above table the numbers in the bottom row are sums of the threenumbers immediately above them, modulo 2 as indicated by (2.37). In CAterms, each cell j is active at time n + 1 if either exactly one or all three ofthe cells j − 1, j, j + 1 are active at time n. Otherwise, cell j is inactive attime n+ 1.
2.4 Notes
For an interesting discussion of difference and differential equations and therelationship between them on general algebraic structures see Bertram (2007).

Difference Equations on Groups 29
Textbooks such as Hungerford (1974) or Fraleigh (1976) have all the requiredinformation on algebra for this section. Books such as Jordan (1965), Mickens(1991) and Elaydi (1999) offer additional introductory background materialon difference equations and their applications should the reader need furtherclarification of some material in this book; for instance, such basic topics asexploring local stability by linearization or solving linear difference equationsusing classical methods are discussed in these books.
Information about the Fibonacci sequence is widely available both in printand on the Internet. Fibonacci sequences modulo m are discussed in severalpublications; see, e.g., Wall (1960), Andreassian (1974), and Renault (1996).Fibonacci sequences have also been considered modulo some noninteger realnumber, e.g., modulo 2π as in Eq. (2.16), or the modulo π case, which arisesas an open problem in Kocic and Ladas (1993), p. 175.
Ladas rational difference equations have been objects of interest to many re-searchers in difference equations for at least the past 15 years. References aretoo numerous to be listed individually here but we refer to the textbooks Ko-cic and Ladas (1993), Kulenovic and Ladas (2002), Grove and Ladas (2004),and Camouzis and Ladas (2008), which collectively contain extensive bibli-ographies.
The more general quadratic-linear rational difference equations have beenstudied in Dehghan, et al. (2008a, 2008b) and Sedaghat (2009b).
Additional books that offer a wide range of topics in theory and applicationsof difference equations of higher order include Agarwal (2000) and Sedaghat(2003). For additional material on partial difference equations and cellularautomata mentioned in Example 2.15 and later examples see Wolfram (1984),Cheng (2003), Gil (2007), and Ceccherini-Silberstein and Coornaert (2010).
2.5 Problems
2.1 Show that for Eq. (2.5) there are no invariant sets A in G = (0,∞).
2.2 Verify by induction that formula (2.13) gives the general solution of Eq.(2.12) in all of R.
2.3 Let z0 = ρ0eiθ0 and z−1 = ρ−1e
iθ−1 be complex numbers. Prove thefollowing statements about Eq. (2.14) and its solutions {zn}:
(a) Eq. (2.14) divides the complex plane C into three disjoint invariant sets:the interior of the unit disk, the exterior of the unit disk and the boundary T
of the unit disk.(b) If ρ0, ρ−1 < 1 then limn→∞ zn = 0; i.e., all solutions of (2.14) with
initial points in the interior of the unit disk converge to zero.(c) If ρ0, ρ−1 > 1 then limn→∞ zn = ∞; i.e., all solutions of (2.14) with
initial points in the exterior of the unit disk converge to infinity.

30 Form Symmetries and Reduction of Order
2.4 Prove the following stronger results about a solution {zn} of Eq. (2.14)in the preceding problem:
(a) If ρ0 ≤ 1 and ρ−1 < 1/ρ0 then limn→∞ zn = 0.(b) If ρ0 ≥ 1 and ρ−1 > 1/ρ0 then limn→∞ zn = ∞.
2.5 This problem brings together ideas in three examples 2.1, 2.3 and 2.4. Weprove in a few steps that the difference equation
zn+1 = znzn−1 (2.38)
has solutions in C that converge neither to 0 nor to ∞; instead, the circleT is the limit set of such solutions. Therefore, the limiting (or asymptotic)behaviors of these solutions may be periodic or nonperiodic depending on theinitial values.
(a) Let ϕn be the Fibonacci sequence 1,1,2,3,5,8,13,.. . discussed in Example2.1 and let γ = (1+
√5)/2 be the “golden ratio”. Use formula (2.10) to prove
that for all m = 0, 1, 2, . . .
ϕ2m < γϕ2m−1 , ϕ2m+1 > γϕ2m, limn→∞
ϕn
ϕn−1= γ.
Note that as it approaches its limit γ the sequence ϕn/ϕn−1 oscillates aboutγ for all n. Specifically, ϕn/ϕn−1 < γ if n is even and ϕn/ϕn−1 > γ if n isodd.
(b) Show that each of the quantities ϕ2m+1 − γϕ2m and γϕ2m−1 − ϕ2m
decreases to zero monotonically as m→ ∞.(c) Let z0 be a nonzero complex number and define the complex number
z−1 so that
|z−1| =1
|z0|γ.
If {zn} is the corresponding solution of (2.38) then prove that for all m =0, 1, 2, . . .
|z2m+1| =1
|z0|γϕ2m−1−ϕ2m, |z2m+2| =
1
|z0|ϕ2m+1−γϕ2m.
(d) If |z0| < 1 then |zn| < 1 for all even integers n and |zn| > 1 for allodd integers n, and this statement remains true if all three inequalities arereversed. Further,
limn→∞
|zn| = 1.
Therefore, the limit set of the solution {zn} of (2.38) is the circle T.(e) If the initial values z0, z−1 are both real and nonzero then {zn} either
converges to 1 (a fixed point of (2.38)) or to the 3-cycle
{. . . , 1,−1,−1, 1,−1,−1, . . .}.

Difference Equations on Groups 31
To prove this statement, let a > 0 and
z0 = ±a, z−1 = ± 1
aγ.
Then show that
zn =
aϕn−1−γϕn−2 , if z0, z−1 > 0(−1)ϕn−1aϕn−1−γϕn−2 , if z0z−1 < 0(−1)ϕnaϕn−1−γϕn−2 , if z0, z−1 < 0
from which the asymptotic behavior follows. This is another type of behaviorthat may occur in Example 2.3.
2.6 Let φ0, φ−1 be self-maps of an arbitrary commutative group G0 as inExample 2.7. Find the solutions of Eq. (2.19) if (a) q = 0, (b) p = 0, (c)p = q = 1.
2.7 Referring to Example 2.8, verify that the solution sequences of permuta-tions have periods 8 and 6, respectively as stated.
2.8 Show that the general solution of xn+1 = x−1n ∗ xn−1 on an arbitrary
commutative group (G, ∗) is
xn = x(−1)nϕn−1
0 ∗ x(−1)n−1ϕn−2
−1 (2.39)
where ϕn is the n-th term of the Fibonacci sequence and for each a ∈ G thenegativer integer power a−j is interpreted as (a−1)j . Examine the differenceequation and its solutions for the two specific groups R under addition andR0 under multiplication. In the case of R compare the results with what isobtained using classical calculations.
2.9 Establish the following stronger form of Example 2.9: Let G be a nontriv-ial group (not necessarily commutative). If the parameter values a, x0, x−1
in Eq. (2.21) commute with each other (i.e., they are contained in a commu-tative subgroup of G) then the corresponding solution of (2.21) has period6.
2.10 Referring to Remark 2.4, consider the equation R
θn+1 = (−θn + θn−1)mod 2π (2.40)
which corresponds to the following equation on T under the substitution zn =eiθn
zn+1 =zn−1
zn. (2.41)
(a) The general solution of (2.41) is given by formula (2.39) above. Ifz−1 = z0 then verify that the formula reduces to
zn = z(−1)nϕn−3
0 if n ≥ 2 and z1 = 1. (2.42)

32 Form Symmetries and Reduction of Order
For the three values z0 = 1,−1, i show that the solutions given by (2.42)are periodic with periods 1, 3 and 6, respectively.
(b) Let θ−1 = θ0 in (2.40). For the three values θ0 = 0, π, π/2 calculatethe corresponding solutions of (2.40). Show that these solutions are periodicwith periods 1, 3, and 6, respectively, and correspond term by term to thesolutions obtained in Part (a).
2.11 Consider the following version of Eq. (2.21) over the group of 2×2matrices with unit determinants:
An+1 = AnA−1n−1. (2.43)
Let
A0 =
[1 10 1
], A−1 =
[0 11 1
].
By calculatingA1 through A6 show that the corresponding solution of (2.43)does not have period 6. Note that A0 and A−1 above do not commute, i.e.,A0A−1 6= A−1A0.
Note: If we choose A−1 and A0 so that they commute with each other (say,pick one to be the identity matrix) then by Problem 2.9 the correspondingsolution of (2.43) in fact has period 6. Therefore, Eq. (2.21) in Example 2.9has a greater variety of solutions if G is not commutative.
2.12 Find all initial points (or states) that lead to 5-cycles for the Lynessequation (2.33) in the field Z7. Does (2.33) have any fixed points in Z7?
13 In this exercise we explore the behaviors of solutions of the following caseof the Lyness equation in finite fields Zp
xn+1 =xn + 2
xn−1. (2.44)
(a) Show that Eq. (2.44) has a fixed point in Zp for all p ≥ 2. What is thisfixed point for each value of p? Consider the cases p = 2 and p > 2 separately.
(b) For p ≥ 5 show that p−1 is a distinct, additional fixed point for (2.44).It may help to recall that p − 1 = −1 in Zp.
(c) For p = 2, 3, 5 determine the singularity sets and the behaviors of allsolutions of (2.44).
2.14 Refer to Example 2.15.
(a) Establish that the n-th row of the solution list of the partial differenceequation (2.35) represents the term xn in the solution of (2.34).
(b) Let x−1 be the constant sequence (1, 1, 1, . . .) in a field F with multi-plicative identity 1. If c 6= 0, 1 is in F then for each of the following choicesof x0 determine the corresponding solution of (2.34) (which also gives the

Difference Equations on Groups 33
corresponding solution of (2.35)):
x0 =
cccccc...
, x0 =
c1c1c1...
, x0 =
c1cc1c...
.
(c) Determine the partial difference equation for each of the following vectordifference equations:
(a) xn+1 = A(xnx−1n−1); (b) xn+1 = xn(Ax−1
n−1);
(c) xn+1 = x−1n (Axn−1); (d) xn+1 = (Axn)(Ax−1
n−1).
2.15 Find the vector difference equations corresponding to each of the follow-ing nonlinear partial difference equations:
(a) xj,n+1 = αnxj,n + βnxj−1,nxj,n−1, n ≥ 0, j ≥ 1
(b) xj,n+1 = αjxj,n + βjxj−1,nxj,n−1, n ≥ 0, j ≥ 1
where {αi}, {βi}, i = 0, 1, 2, . . . are given sequences of real numbers.

This page intentionally left blankThis page intentionally left blank

3
Semiconjugate Factorization and Reductionof Order
This chapter begins our study of the main topic of this book, namely, decom-positions (or factorizations) and reductions of order in difference equations.We introduce the basic concept of semiconjugacy on which a systematic frame-work for decomposition and reduction of order can be build for recursive (orexplicit) equations of type (2.3), i.e.,
xn+1 = fn(xn, xn−1, . . . , xn−k). (3.1)
Despite its abstract-sounding name, we see below that the concept of semi-conjugacy can be used to formalize the highly concrete ideas of change ofvariables and reduction of order in recursive difference equations.
Patience with the developments in this chapter will be rewarding as thereader proceeds to later chapters. In Chapters 4, 5, and 6 we discuss ap-plications and particular cases of the ideas and methods introduced in thischapter. Then, in Chapters 7 and 8 we extend the methods and concepts ofthis chapter to more general difference equations that include broader classesof nonautonomous equations as well as general nonrecursive equations.
3.1 Semiconjugacy and ordering of maps
3.1.1 Basic concepts
DEFINITION 3.1 Let S and M be arbitrary nonempty sets and let F,Φbe self-maps of S and M , respectively. If there is a mapping H : S →M suchthat H is not constant and
H ◦ F = Φ ◦H (3.2)
then we say that the mapping F is semiconjugate to Φ and refer to Φ as asemiconjugate (SC) factor of F . The function H may be called a link map.We refer to the equality (3.2) is the semiconjugate relation.
35

36 Form Symmetries and Reduction of Order
The semiconjugate relation (3.2) is illustrated by the following diagram
SF−→ F (S)
↓H ↓H
H(S) ⊂MΦ−→ Φ(H(S)) = H(F (S))
If H is a bijection (one-to-one and onto) then we call F and Φ conjugatesand alternatively write
Φ = H ◦ F ◦H−1. (3.3)
We use the notation F ' Φ when F and Φ are conjugates. It is easy to showthat ' is an equivalence relation for self-maps of a set S onto itself.
Example 3.1
Consider the following self-maps of the plane R2:
F1(u, v) = [u2 + v2 , 2uv], F2(u, v) = [u2 − v2, 2uv].
Note that u2 + v2 + 2uv = (u+ v)2 so let H1(u, v) = u+ v to obtain
H1(F1(u, v)) = (u+ v)2 = [H1(u, v)]2.
It follows that F1 is semiconjugate to Φ(t) = t2 on R. For F2 define H2(u, v) =(u2 + v2)1/2 to get
H2(F2(u, v)) =
√(u2 − v2)
2+ 4u2v2 = u2 + v2 = [H2(u, v)]
2.
Therefore, F2 is also semiconjugate to Φ(t) = t2 though this time on [0,∞)since H2(u, v) ≥ 0 for all (u, v) ∈ R2.
REMARK 3.1 (nonuniqueness of semiconjugates)The maps F , Φ and H are not uniquely determined by each other. In
particular, the link map H is not uniquely defined by F and Φ. In Example3.1 defining the function H1 as u− v would give the same Φ.
The motivation for H2 came from interpreting F2 as the R2 version of thecomplex function z2 whose modulus satisfies |z2| = |z|2. But we also noticethat the same H2 would work if the components of F2 were switched or if oneof its component functions were replaced by its negative so that there could beno direct relationship to the complex square function. Hence, different F maycorrespond to the same H and Φ. In none of the above cases the semiconjugaterelation is a conjugacy since neither H1 nor H2 are bijections.
3.1.2 Coordinate transformations vs semiconjugacy
Coordinate transformations have classically been the means by which variablesare changed in difference equations. One application of coordinate transfor-mations is to reduce the order of a difference equation by “uncoupling” it, i.e.,

Semiconjugate Factorization 37
splitting it into two or more lower order equations. However, while in somecases coordinate transformations work very well, in other cases they may notbe the best way of achieving a reduction in order.
To illustrate both cases, consider the two-dimensional or planar differenceequations
(xn+1, yn+1) = Fi(xn, yn), i = 1, 2
where Fi are given as in Example 3.1. We can change variables in each ofthese difference equations on R2 by transforming the coordinates from thegiven rectangular one to something else. For this problem we switch to polarcoordinates:
xn = rn cos θn, yn = rn sin θn, r2n = x2n + y2
n, tan θn =yn
xn.
Then for F2 we obtain
xn+1 = x2n − y2
n = r2n cos 2θn,
yn+1 = 2xnyn = r2n sin 2θn.
Eliminating the rectangular coordinates gives
rn+1 =√x2
n+1 + y2n+1 = r2n
√cos2 2θn + sin2 2θn ⇒ rn+1 = r2n
tan θn+1 =yn+1
xn+1=r2n sin 2θn
r2n cos 2θn= tan 2θn ⇒ θn+1 = 2θn modπ.
The important thing to notice is that the system of polar equations isuncoupled because rn and θn are determined independently by means of first-order equations: The first equation above shows that the radius is squared ineach iteration while the second one indicates a doubling of the polar angle.A similar uncoupling via polar coordinates does not occur for F1; in fact, asimilar calculation yields the polar system of equations in this case as
rn+1 = r2n
√1 + sin2 2θn
θn+1 = tan−1 sin 2θn,
which is not uncoupled into first-order equations that are independent of eachother.
The semiconjugate relations in Example 3.1 reduce the number of variablesfrom 2 to 1 with equal ease in both F1 and F2 through loss of information. Forexample, in the case of F2 the SC relation accounts for the squaring of radiusthrough the one-dimensional map Φ but it ignores the doubling of angles.Since coordinate transformations retain more information about a map, theycan be more difficult to obtain. On the other hand, if the “lost” informationin the SC relation can be recovered somehow, then the SC relations may beeasier to obtain as in the case of the mapping F1. Later in this chapter wediscuss a method not only of obtaining a semiconjugate mapping but also ofrecovering the lost information.

38 Form Symmetries and Reduction of Order
3.1.3 Semiconjugacy as a map-ordering relation
In Definition 3.1 the function H is not constant but otherwise unrestricted.This does not rule out some trivial or improper situations. For instance, ifS ⊂ M and Φ is any extension of F to M, i.e., Φ|S = F then the inclusionmap H : S → M defined as H(x) = x for all x ∈ S is a semiconjugate linkbetween F and Φ since for all
Φ(H(x)) = Φ|S(x) = F (x) = H(F (x)) for all x ∈ S.
More generally, suppose that S and M are such that there is an injective(one-to-one) function G : S →M with S′ = G(S) 6= M. If F ′ : S′ → S′ is themapping
F ′ = G ◦ F ◦G−1
and we define H : S′ →M as the inclusion map and Φ′ as any extension of F ′
to M then as in the above we find that Φ′ is semiconjugate to F ′, a conjugateequivalent of F on S′.
To avoid uninteresting situations like these, the following restriction is in-troduced.
DEFINITION 3.2 F is surjectively (or properly) semiconjugateto Φ in Definition 3.1 if the link map H is surjective (onto). In this casewe write F D Φ. From now on we implicitly assume that the link map issurjective except when stated otherwise.
The surjective semiconjugate relation is illustrated by the following diagram
SF−→ F (S)
↓H ↓H
MΦ−→ Φ(M) = H(F (S))
Note that since by Definition 3.1 the link map H is not a constant function,M cannot be a singleton set. Further, the cases cited before Definition 3.2 areno longer problematic since the inclusion maps in those examples are not ontoM . In a precise sense, the surjectivity requirement ensures that all elementsof M are “interesting.”
The binary relation in Definition 3.2 is not generally an equivalence relationbut the next result shows that D is transitive like an ordering relation amongthree or more semiconjugate maps.
PROPOSITION 3.1
If F D Φ and Φ D Ψ then F D Ψ.

Semiconjugate Factorization 39
PROOF Let the mappings H and H ′ be surjective and
H ◦ F = Φ ◦H and H ′ ◦ Φ = Ψ ◦H ′
relative to appropriate domain and range sets. Then
H ′ ◦H ◦ F = H ′ ◦ Φ ◦H = Ψ ◦H ′ ◦H.
Therefore, F D Ψ with the link mapping H ′ ◦ H. Note that H ′ ◦ H issurjective.
In Example 3.1, the function Φ(t) = t2, which is simpler than F1 may beconsidered “below” or “lower than” F1 in the ordering D since F1 D Φ.
3.1.4 The semiconjugacy problem
Suppose that the sets S and M are given together with a self-map F of S. Wemay ask if there are maps H and Φ that satisfy Definition 3.2. The answerto this question may be trivial without further narrowing of our focus. Forexample, if M = S then choosing H as the identity map and Φ = F wouldanswer our question in the affirmative. But clearly, this is not a satisfactoryanswer and in cases of interest involving reduction of order M 6= S. Thefollowing refines our question.
The Semiconjugacy (SC) Problem. Suppose that the sets S and Mare given together with a self-map F of S. If M is a given nonempty class ofself-maps of M then is there a surjective link map H relative to which F issemiconjugate to some Φ ∈ M?
This is a nontrivial problem; in fact, there are no general results that guar-antee the existence of H for every class M of mappings Φ. For instance, ifwe modify Example 3.1 slightly by replacing the coefficient 2 in F1 with anarbitrary real number a to get F a
1 (u, v) = [u2 + v2, auv] then it is not clearwhether (or not) there is a function Φa on the real line R such that F a
1 D Φa
for a 6= 2. Note that the requirement that Φa be restricted to the real line isthe reason for increased difficulty of the problem. If we allowed Φa to be aself-map of R2 then trivially F a
1 D F a1 relative to the identity function H for
all a ∈ R.
Questions about the existence of semiconjugates can sometimes be moreeasily answered in finite settings, as the next example shows; also see theProblems for this chapter and Examples 3.4 and 3.5.
Example 3.2
Consider the following autonomous difference equation of order 2 on the finitefield Z2:
xn+1 = xnxn−1 + 1, x0, x−1 ∈ {0, 1}. (3.4)

40 Form Symmetries and Reduction of Order
Eq. (3.4) is represented by its unfolding F (u, v) = [uv + 1, u] on Z22. We
determine all self-maps of Z2 that are SC factors of F. There are four self-maps of Z2; they are the constant maps ξ0 ≡ 0, ξ1 ≡ 1, the identity map ι andthe mapping ψ(t) = t + 1 which maps 0 to 1 and conversely. Also there are16 link maps H : Z2
2 → Z2 of which the 14 non-constant ones are surjective.We list these 14 maps succinctly as follows:
H1 = (0, 0, 0, 1) H2 = (0, 0, 1, 0) H3 = (0, 0, 1, 1) H4 = (0, 1, 0, 0)H5 = (0, 1, 0, 1) H6 = (0, 1, 1, 0) H7 = (0, 1, 1, 1) H8 = (1, 0, 0, 0)H9 = (1, 0, 0, 1) H10 = (1, 0, 1, 0) H11 = (1, 0, 1, 1)H12 = (1, 1, 0, 0)H13 = (1, 1, 0, 1)H14 = (1, 1, 1, 0).
In the above list, e.g., H5 is defined by the rule
H5 : (0, 0) → 0, (0, 1) → 1, (1, 0) → 0, (1, 1) → 1
The other link maps are defined by the same rule. Writing F as
F : (0, 0) → (1, 0), (0, 1) → (1, 0), (1, 0) → (1, 1), (1, 1) → (0, 1).
we calculate the compositions Hj ◦ F for j = 1, . . . , 14:
H1 ◦ F = (0, 0, 1, 0) H2 ◦ F = (1, 1, 0, 0) H3 ◦ F = (1, 1, 1, 0)H4 ◦ F = (0, 0, 0, 1) H5 ◦ F = (0, 0, 1, 1) H6 ◦ F = (1, 1, 0, 1)H7 ◦ F = (1, 1, 1, 1) H8 ◦ F = (0, 0, 0, 0) H9 ◦ F = (0, 0, 1, 0)H10 ◦ F = (1, 1, 0, 0) H11 ◦ F = (1, 1, 1, 0) H12 ◦ F = (0, 0, 0, 1)H13 ◦ F = (0, 0, 1, 1)H14 ◦ F = (1, 1, 0, 1).
Next we check the compositions ξ0 ◦Hj, ξ1 ◦Hj, ι ◦Hj , ψ ◦Hj against eachentry in the above table. For instance, H1 ◦ F is not constant, not equal toH1 and not equal to the “negation” of H1, i.e., ψ ◦H1 = (1, 1, 1, 0). Therefore,H1 ◦ F is different from ξ0 ◦Hj, ξ1 ◦Hj, ι ◦Hj, ψ ◦Hj and therefore, H1 isnot a SC link map for F . Repeating this calculation shows that Hj is a SClink map only for j = 7, 8. For these two cases we obtain
H7 ◦ F = (1, 1, 1, 1) = ξ1 ◦H7, H8 ◦ F = (0, 0, 0, 0) = ξ0 ◦H8
so the constant maps ξ0 and ξ1 are both SC factors of F. The above cal-culations also indicate that these constant maps are the only semiconjugatefactors of F.
As the preceding example shows, if S and M are both finite then for eachgiven self-map F : S → S one can, in principle, calculate all pairs H ◦ F andΦ ◦H for all surjective (onto) link maps H and all self-maps Φ : M →M anddetermine which pairs, if any, are equal. Thus with adequate computing re-sources one can solve the SC Problem for relatively small finite sets. However,since the number of pairs that are required to check increases exponentiallywith the sizes of sets S and M the brute-force computational approach tostudying the SC Problem becomes impractical even for moderately-sized fi-nite sets.

Semiconjugate Factorization 41
3.1.5 Semiconjugacy and difference equations
We now apply the notion of semiconjugacy to decomposing difference equa-tions into pairs of lower order ones. Not surprisingly, we find that the diffi-culties in reducing the order of a difference equation in this way can often betraced to the Semiconjugacy Problem; see Section 3.1.4; also see Section 3.2below. To make the transition to reduction of order in difference equations,let k be a nonnegative integer andG a nonempty set (not necessarily a group).Let {Fn} be a family of functions Fn : Dn → Gk+1 where Dn ⊂ Gk+1 for alln = 0, 1, 2, . . . We assume that
D =
∞⋂
n=0
Dn
is a nonempty subset of Gk+1 and write Fn = [f1,n, . . . , fk+1,n] where fj,n :D → G are the component functions of Fn restricted to D for all j and all n.
Let m be an integer, 1 ≤ m ≤ k+1 and assume that each Fn is semiconju-gate to a map Φn : D′
n → Gm where D′n ⊂ Gm. Let H : Gk+1 → Gm be the
link map such that for every n,
H ◦ Fn = Φn ◦H. (3.5)
The following diagram illustrates 3.5:
Gk+1 Fn−→ Fn(Gk+1)↓H ↓H
Gm Φn−→ Φn(Gm) = H(Fn(Gk+1))
We assume that D′n ∩ H(Dn) is nonempty for all n. By keeping only the
portion of D′n that overlaps H(Dn) we may assume without loss of generality
that D′n ⊃ H(Dn) for all n. Then
∞⋂
n=0
D′n ⊃
∞⋂
n=0
H(Dn) ⊃ H(D).
Thus for every n, if Fn is restricted to D then we may assume that Φn isrestricted to H(D). Next, let us write
H(u0, . . . , uk) = [h1(u0, . . . , uk), . . . , hm(u0, . . . , uk)]
Φn(t1, . . . , tm) = [φ1,n(t1, . . . , tm), . . . , φm,n(t1, . . . , tm)]
where hj : Gk+1 → G and φj,n : H(D) → G are the corresponding componentfunctions for j = 1, 2, . . . , m. Then identity (3.5) is equivalent to the systemof equations
hj(f1,n(u0, . . . , uk), . . . , fk+1,n(u0, . . . , uk)) =
φj,n(h1(u0, . . . , uk), . . . , hm(u0, . . . , uk)), j = 1, 2, . . . , m. (3.6)

42 Form Symmetries and Reduction of Order
If the functions fj,n are given then (3.6) is a system of functional equationswhose solutions hj, φj,n give the maps H and Φn. Note that if m < k + 1then the functions Φn on Gm define a system with lower dimension than thatdefined by the functions Fn on Gk+1. The system of equations (3.6) forms thebasis for our work in the next section.
Now, suppose that D is an invariant subset of Gk+1 to avoid the occurrenceof singularities and related technical problems in the following discussion.
PROPOSITION 3.2
Assume that D is invariant under all Fn, i.e., Fn(D) ⊂ D for all n and (3.5)holds. Then H(D) is invariant under Φn for all n.
PROOF It is evident that H(Fn(D)) = Φn(H(D)) for all n. Therefore,
Fn(D) ⊂ D ⇒ H(Fn(D)) ⊂ H(D) ⇒ Φn(H(D)) ⊂ H(D).
Therefore, H(D) is invariant under Φn for every n.
The following equation in the k + 1 dimensional space Gk+1 generalizesdifference equations of order k + 1 on G:
Xn+1 = Fn(Xn), X0 ∈ D ⊂ Gk+1. (3.7)
For a given solution {Xn} of (3.7) let Yn = H(Xn) for n = 0, 1, 2, . . . Then
Yn+1 = H(Xn+1) = H(Fn(Xn)) = Φn(H(Xn)) = Φn(Yn)
so that {Yn} satisfies the difference equation
Yn+1 = Φn(Yn), Y0 = H(X0) ∈ H(D) ⊂ Gm. (3.8)
If k ≥ 1 and 1 ≤ m ≤ k then (3.8) is a system with lower dimensionm than the original k + 1 dimensional system. We will see later that thisapparent loss of structure and information actually leads to reduction of orderin difference equations. We also discuss a way of recovering the (temporarily)lost information.
3.1.6 Invariants
In (3.5) let Fn = F and Φn = ι, the identity map for all n. Then for eachinitial state X0 we obtain
H(X1) = H(F (X0)) = ι(H(X0)) = H(X0).
Repeating the preceding argument gives
H(F n(X0)) = H(Xn) = H(X0) for all n ≥ 1. (3.9)

Semiconjugate Factorization 43
From (3.9) it is evident that the value of H does not change, or is constanton the orbits of F. This observation justifies the following definition.
DEFINITION 3.3 If F is semiconjugate to the identity map then thelink map H is an invariant for F and it satisfies (3.9).
Example 3.3
A well-known example of a map with an invariant is the Lyness map of theplane R2 that is defined as
FL(u, v) =
[a + u
v, u
].
It is easy to check that the function
HL(u, v) =
(1 +
1
u
)(1 +
1
v
)(a+ u+ v)
is an invariant for FL. Also see Example 2.14 above.
The question of whether an invariant exists or how to compute it for agiven map F is as difficult to answer as the SC problem itself. Again, in finitesettings this question is easier to answer. For instance, the map F in Example3.2 clearly has no invariants. However, in the next example, we do find aninvariant.
Example 3.4
Let Z2 be as in Example 3.2 but now consider the following difference equationof order 2 in Z2,
xn+1 = (xn + 1)xn−1, x0, x−1 ∈ {0, 1}.
With F (u, v) = [(u + 1)v, u], proceeding as in Example 3.2 we obtain thefollowing results:
H1 ◦ F = (0, 0, 0, 0) = ξ0 ◦H1, H14 ◦ F = (1, 1, 1, 1) = ξ1 ◦H14
H7 ◦ F = (0, 1, 1, 1) = H7, H8 ◦ F = (1, 0, 0, 0) = H8.
In particular, H7 and H8 are now invariants, unlike the situation encoun-tered in Example 3.2. It is easy to check by inspection that they can bewritten in algebraic form as
H7(u, v) = uv + u+ v, H8(u, v) = uv + u+ v + 1.

44 Form Symmetries and Reduction of Order
3.2 Form symmetries and SC factorizations
Let k ≥ 1 and 1 ≤ m ≤ k so that Eq. (3.1), i.e.,
xn+1 = fn(xn, xn−1, . . . , xn−k)
has order at least 2. Let Fn be the associated map (or unfolding) of thefunction fn as in Definition 2.3, i.e.,
Fn(u0, . . . , uk) = [fn(u0, . . . , uk), u0, . . . , uk−1].
Even with each such Fn semiconjugate to an m-dimensional map Φn as in(3.5) the preceding discussion only gives the system (3.8) in which the mapsΦn are not necessarily of scalar type similar to Fn. To ensure that each Φn isalso of scalar type and hence unfolds a difference equation we define the firstcomponent function of H as
h1(u0, . . . , uk) = u0 ∗ h0(u1, . . . , uk) (3.10)
where h0 : Gk → G is a function to be determined and ∗ denotes the groupoperation. This restriction onH makes sense for Eq. (3.1) which is of recursivetype; i.e., xn+1 given explicitly by functions fn that depend on states beforexn+1. With these restrictions on H and Fn the first equation in (3.6) is givenby
fn(u0, . . . , uk) ∗ h0(u0, . . . , uk−1) = (3.11)
gn(u0 ∗ h(u1, . . . , uk), h2(u0, . . . , uk), . . . , hm(u0, . . . , uk))
where for notational convenience we have set
gn.= φ1,n : Gm → G.
3.2.1 Order-reducing form symmetries
Eq. (3.11) is a functional equation in which the functions hj, gn may bedetermined in terms of the given functions fn. Our aim is to extract a scalarequation of order m such as
tn+1 = gn(tn, . . . , tn−m+1) (3.12)
from (3.11) in such a way that the maps Φn will be of scalar type. The basicframework for carrying out this process is already in place; let {xn} be asolution of Eq. (2.3) and define
tn = xn ∗ h0(xn−1, . . . , xn−k).

Semiconjugate Factorization 45
Then the left-hand side of (3.11) for the solution {xn} is
xn+1 ∗ h0(xn, . . . , xn−k+1) = tn+1, (3.13)
which gives the initial part of the difference equation (3.12). In order that theright-hand side of (3.11) coincide with that in (3.12) it is necessary to define
hj(xn, . . . , xn−k) = tn−j+1 = xn−j+1 ∗ h0(xn−j, . . . , xn−k+1−j), (3.14)
for j = 2, . . . , m.
Since the left-hand side of (3.14) does not depend on the terms
xn−k−1, . . . , xn−k−j+1
it follows that the function hj must be constant in its last few coordinates.Since h0 does not depend on j it must be constant in some of its coordinates.The number of its constant coordinates is found from the last function hm.Specifically, we have
hm(xn, . . . , xn−k) = xn−m+1 ∗ h0(xn−m, . . . , xn−k︸ ︷︷ ︸k−m+1 variables
, xn−k−1, . . . , xn−k−m+1︸ ︷︷ ︸m−1 terms h0 is constant at
).
(3.15)The preceding condition leads to the necessary restrictions on h0 and every
hj for a consistent derivation of (3.12) from (3.11). Therefore, (3.15) is aconsistency condition. Now from (3.14) and (3.15) for (u0, . . . , uk) ∈ Gk+1 weobtain
hj(u0, . . . , uk) = uj−1 ∗ h(uj, uj+1 . . . , uj+k−m), j = 1, . . . , m. (3.16)
In (3.16) the function h : Gk+1−m → G represents the variable part of h0;i.e., it takes precisely the same values as h0. In fact, if G is a group then wemay define
h(u0, . . . , uk−m) = h0(u0, . . . , uk−m, 1, . . . , 1), (u0, . . . , uk−m) ∈ Gk+1−m
where 1 is the identity of G. Using (3.16) in (3.11) we obtain for all n ≥ 0
fn(u0, . . . , uk) ∗ h(u0, . . . , uk−m) = gn(u0 ∗ h(u1, u2 . . . , uk−m+1),
u1 ∗ h(u2, u3 . . . , uk−m+2), . . .
um−1 ∗ h(um, um+1 . . . , uk)).(3.17)
Eq. (3.17) is a special case of the semiconjugate relation (3.5); with thedefinitions of Fn,Φn, gn and H given above, the left-hand side of (3.17) isrecognizable as H ◦Fn and the right-hand side as Φn ◦H. The next definitionformalizes the role of the somewhat special H in this context.

46 Form Symmetries and Reduction of Order
DEFINITION 3.4 The function H = [h1, . . . , hm] whose components hj
are defined by (3.16) is a (recursive) form symmetry for Eq. (3.1). Sincethe range of H has a lower dimension m than the dimension k + 1 of itsdomain, we say that H is an order-reducing form symmetry.
In the next section we show how to use form symmetries to change variables,decompose and obtain a reduction of order in a difference equation.
3.2.2 The semiconjugate factorization theorem
Assume that G denotes a nontrivial group and let {xn} be a solution of (3.1)in G. As in the previous section, we use (3.13), (3.16), and (3.17) to obtainthe following pair of lower-order equations
tn+1 = gn(tn, . . . , tn−m+1), (3.18)
xn+1 = tn+1 ∗ h(xn, . . . , xn−k+m)−1 (3.19)
where −1 denotes group inversion inG. Before stating our main decompositiontheorem we give names to the above equations for easy later reference.
DEFINITION 3.5 Eq. (3.18) is a factor of Eq. (3.1) since it is distilledfrom the semiconjugate factor Φn. Eq. (3.19) that links the factor to theoriginal equation is a cofactor of Eq. (3.1). We call the system of equations(3.18) and (3.19) a semiconjugate (SC) factorization of Eq. (3.1).
If {tn} is a given solution of Eq. (3.18) then using it in (3.19) produces asolution {xn} of Eq. (3.1). Conversely, if {xn} is a solution of (3.1) then thesequence tn = xn ∗ h(xn−1, . . . , xn−k+m−1) is a solution of (3.18) with initialvalues
t−j = x−j ∗ h(x−j−1, . . . , x−j−k+m−1), j = 0, . . . , m− 1.
Since solutions of the pair of equations (3.18) and (3.19) coincide with thesolutions of (3.1), we say that the pair (3.18) and (3.19) constitute a systemthat is equivalent to the higher-order equation (3.1).
We now present the fundamental theorem on semiconjugate decompositionof difference equations.
THEOREM 3.1
Let k ≥ 1, 1 ≤ m ≤ k and suppose that there are functions h : Gk+1−m → Gand gn : Gm → G that satisfy equations (3.16) and (3.17).
(a) With the order-reducing form symmetry
H(u0, . . . , uk) = [u0 ∗ h(u1, . . . , uk+1−m), . . . , um−1 ∗ h(um, . . . , uk)] (3.20)

Semiconjugate Factorization 47
Eq. (3.1) is equivalent to the SC factorization consisting of the system ofequations (3.18) and (3.19) whose orders m and k + 1 −m respectively, sumto the order of (3.1).
(b) The function H : Gk+1 → Gm defined by (3.20) is surjective (onto).
(c) For each n, the SC factor function Φn : Gm → Gm in (3.5) is theunfolding of Eq. (3.18). In particular, each Φn is of scalar type.
PROOF (a) To show that the SC factorization system consisting of equa-tions (3.18) and (3.19) is equivalent to Eq. (3.1) we show that: (i) eachsolution {xn} of (3.1) uniquely generates a solution of (3.18) and (3.19) andconversely (ii) each solution {(tn, yn)} of the system (3.18) and (3.19) cor-reseponds uniquely to a solution {xn} of (3.1). To establish (i) let {xn}be the unique solution of (3.1) corresponding to a given set of initial valuesx0, . . . x−k ∈ G. Define the sequence
tn = xn ∗ h(xn−1, . . . , xn−k+m−1) (3.21)
for n ≥ −m+ 1. Then for each n ≥ 0 using (3.17)
xn+1 = fn(xn, . . . , xn−k)
= gn(xn ∗ h(xn−1, . . . , xn−k+m−1), . . . , xn−m+1 ∗ h(xn−m, . . . , xn−k))
∗ [h(xn, . . . , xn−k+m)]−1
= gn(tn, . . . , tn−m+1) ∗ [h(xn, . . . , xn−k+m)]−1.
Therefore, gn(tn, . . . , tn−m+1) = xn+1 ∗ h(xn, . . . , xn−k+m) = tn+1 so that{tn} is the unique solution of the factor equation (3.18) with initial values
t−j = x−j ∗ h(x−j−1, . . . , x−j−k+m−1), j = 0, . . . , m− 1.
Further, by (3.21) for n ≥ 0 we have xn+1 = tn+1 ∗ [h(xn, . . . , xn−k+m)]−1
so that {xn} is the unique solution of the cofactor equation (3.19) with initialvalues y−i = x−i for i = 0, 1, . . . , k −m and tn obtained above.
To establish (ii) let {(tn, yn)} be a solution of the factor-cofactor systemwith given initial values
t0, . . . , t−m+1, y−m, . . . y−k ∈ G.
Note that these numbers determine y−m+1 , . . . , y0 through the cofactorequation
y−j = t−j ∗ [h(y−j−1, . . . , y−j−1−k+m)]−1, j = 0, . . . , m− 1. (3.22)

48 Form Symmetries and Reduction of Order
Now for n ≥ 0,
yn+1 = tn+1 ∗ [h(yn, . . . , yn−k+m)]−1
= gn(tn, . . . , tn−m+1) ∗ [h(yn, . . . , yn−k+m)]−1
= gn(yn ∗ h(yn−1, . . . , yn−k+m−1), . . . , yn−m+1 ∗ h(yn−m, . . . , yn−k))
∗ [h(yn, . . . , yn−k+m)]−1
= fn(yn, . . . , yn−k)
where the last step is justified by (3.17). Thus {yn} is the unique solution ofEq. (3.1) that is generated by the initial values (3.22) and y−m, . . . y−k. Thiscompletes the proof of (a).
(b) Choose an arbitrary point [v1, . . . , vm] ∈ Gm and set
um−1 = vm ∗ h(um, um+1 . . . , uk)−1
where um = um+1 = . . . uk = u where u is a fixed element of G, e.g., theidentity. Then
vm = um−1 ∗ h(u, u . . . , u)= um−1 ∗ h(um, um+1 . . . , uk)
= hm(u0, . . . , uk)
= hm(u0, . . . , um−2, vm ∗ h(u, u . . . , u)−1, u . . . , u)
for any choice of u0, . . . , um−2 ∈ G. Similarly, define
um−2 = vm−1 ∗ h(um−1, um . . . , uk−1)−1
so as to get
vm−1 = um−2 ∗ h(um−1, um . . . , uk−1)
= hm−1(u0, . . . , uk)
= hm−1(u0, . . . , um−3, vm−1 ∗ h(um−1, u . . . , u)−1, um−1, u . . . , u)
for any choice of u0, . . . , um−3 ∈ G. Continuing in this way, induction leadsto selection of um−1, . . . , u0 such that
vj = hj(u0, . . . , um−1, u . . . , u), j = 1, . . . , m.
Therefore, H(u0, . . . , um−1, u . . . , u) = [v1, . . . , vm] and it follows that H isonto Gm.
(c) It is necessary to prove that each coordinate function φj,n is the projec-tion into coordinate j − 1 for j > 1. Suppose that the maps hj are given by(3.16). For j = 2 (3.6) gives
φ2,n(h1(u0, . . . , uk), . . . , hm(u0, . . . , uk)) = h2(fn(u0, . . . , uk), u0, . . . , uk−1)
= u0 ∗ h(u1, u2 . . . , uk−m+1)
= h1(u0, . . . , uk).

Semiconjugate Factorization 49
Therefore, φ2,n projects into coordinate 1. Generally, for j ≥ 2 we have
φj,n(h1(u0, . . . , uk), . . . , hm(u0, . . . , uk)) = hj(fn(u0, . . . , uk), u0, . . . , uk−1)
= uj−2 ∗ h(uj−1, uj . . . , uj+k−m−1)
= hj−1(u0, . . . , uk).
Therefore, for each n and for every (t1, . . . , tm) ∈ H(Gk+1) we have
Φn(t1, . . . , tm) = [gn(t1, . . . , tm), t1, . . . , tm−1]
i.e., Φn|H(Gk+1) is of scalar type. Since by Part (b) H(Gk+1) = Gm it follows
that Φn is of scalar type.
We point out that the SC factorization in Theorem 3.1(a) does not requirethe determination of φj,n for j ≥ 2. However, as seen in Parts (b) and (c)of the theorem the rest of the picture fits together properly. In particular,in Part (b) we see that the order-reducing form symmetry H is a surjectivesemiconjugate link.
REMARK 3.2 (The semiconjugacy problem for higher-order differenceequations)
Let G be a nontrivial group. In Section 3.1.4 assume that S = Gk+1,M = Gm and let Fn be the sequence of unfoldings of the difference equation(3.1) of order k + 1. Then the existence of a form symmetry H is equivalentto the existence of a solution to the semiconjugacy problem with M being thecollection of all maps that are unfoldings of difference equations of order m.By the Factorization Theorem above, M may be assumed to be the class of allself-maps of M , since if there a form symmetry H relative to which Fn D Φn
for each n then Φn must be the unfolding of the factor difference equationof order m. In either case, this is a highly nontrivial problem for the values1 ≤ m ≤ k.
We discuss many applications of Theorem 3.1 in various sections and chap-ters that follow. The following example gives a flavor.
Example 3.5
Let G be any nontrivial commutative or Abelian group and consider the fol-lowing difference equation of order two
xn+1 = xn−1 + a, a, x0, x−1 ∈ G, a 6= 0. (3.23)
The unfolding of Eq. (3.23) is the map F (u, v) = [v + a, u]. Define
H(u, v) = u+ v and φ(t) = t + a (3.24)

50 Form Symmetries and Reduction of Order
and note that
H(F (u, v)) = u+ v + a = φ(u+ v) = φ(H(u, v)).
Therefore, F D φ with H being a form symmetry of type u + h(v) whereh is the identity function on G. Now using Theorem 3.1 we obtain the SCfactorization of Eq. (3.23) as
tn+1 = φ(tn) = tn + a, t0 = H(x0, x−1) = x0 + x−1
xn+1 = tn+1 − xn.
Note that if G = Z2 under addition then H = H6 and φ = ψ in Example 3.2.This fact motivated the more general example here.
3.3 Order-reduction types
Theorem 3.1 provides a natural classification scheme for order reduction thatwe discuss in this section. In order to obtain all solutions of Eq. (3.1) thelower-order factor equation is not sufficient. The cofactor equation is alsorequired and it is generally as important as the factor in understanding theproperties of (3.1). The next definition introduces the appropriate designa-tions.
3.3.1 The basic concept
DEFINITION 3.6 The SC factorization of Eq. (3.1) into (3.18) and(3.19) gives a type-(m, k+ 1−m) order reduction (or just type-(m, k+1−m) reduction) for (3.1). We also say that (3.1) is a type-(m, k+1−m)equation in this case.
A second-order difference equation (k = 1) can have only the type-(1,1)order reduction into two first-order equations. A third-order equation hastwo order reduction types, namely, (2,1) and (1,2), a fourth-order equationhas three order reduction types (2,1), (2,2) and (1,2) and so on. We shallencounter many examples of the two extreme types (k, 1) and (1, k) in therest of the book. The following example furnishes a type-(m, k + 1 − m)equation for any 1 ≤ m ≤ k.
Example 3.6
Consider the rational difference equation
xn+1 =anxn−m+1xn−k + bn
xn−k+m(3.25)

Semiconjugate Factorization 51
where 1 ≤ m ≤ k and {an}, {bn} are sequences in some field (e.g., the realnumbers) with an 6= 0 for all n. Multiplying the above equation by xn−k+m
and substituting
tn = xnxn−k+m−1
for all n in it gives
tn+1 = antn−m+1 + bn
as a factor equation of order m with a cofactor of order k + 1 − m that isderived from the above substitution as
xn+1 =tn+1
xn−k+m.
In particular, if k = 2m− 1 in Eq. (3.25) then for every m ≥ 1 we obtaina type-(m,m) reduction for
xn+1 = anxn−2m+1 +bn
xn−m+1
via the SC factorization
tn+1 = antn−m+1 + bn,
xn+1 =tn+1
xn−m+1.
3.3.2 Nonuniqueness of factorizations and reduction types
In general, a given difference equation may have different order reduction typesor SC factorizations. The next two examples illustrate these facts; more casesare encountered later on.
Example 3.7
(Different SC factorizations for the same reduction type) Consider the second-order difference equation
xn+1 = axn + bxn−1 with a+ b = 1. (3.26)
The only possible order reduction type for this equation is (1,1). However, thisequation has at least three distinct form symmetries with their correspondingSC factorizations. First, setting a = 1 − b and rearranging terms in (3.26)reveals the form symmetry
H(xn, xn−1) = xn − xn−1

52 Form Symmetries and Reduction of Order
and the corresponding SC factorization on the additive group of real numbers:
xn+1 − xn = −b(xn − xn−1) ⇒ tn+1 = −btn,xn+1 = tn+1 + xn.
On the other hand,H(xn, xn−1) = xn + bxn−1
is also a form symmetry of (3.26) with its SC factorization again on theadditive reals because
xn+1 + bxn = (a+ b)xn + bxn−1 = xn + bxn−1 ⇒ tn+1 = tn,
xn+1 = tn+1 − bxn.
Finally, if a, b ≥ 0 then there is also the form symmetry
H(xn, xn−1) = xn/xn−1
with its SC factorization on the group of positive real numbers under ordinarymultiplication:
xn+1
xn= a+
bxn−1
xn⇒ tn+1 = a+
b
tn,
xn+1 = tn+1xn.
The third factorization above is valid also on the multiplicative group of allnonzero real numbers with a, b ∈ R although on this larger group there is alsoa nonempty singularity set for the factor equation which limits the equivalenceof the SC factorization to the original equation (the solutions of the latter thatcontain a zero must be excluded to keep the ratios well defined). See Section5.4 for further discussion of this issue.
REMARK 3.3 Of the three form symmetries and SC factorizations ofEq. (3.26) discussed in Example 3.7 we discover in Chapter 4 that the firstand the third belong to the same general class even though they look differentand are expressed on different groups. Note that the third SC factorization isvalid for a+ b > 0 and does not require that a + b add up to unity. The firstform symmety and its SC factorization also belongs to two different classesthat contains the second form symmetry; these classes of form symmetriesand the corresponding SC factorizations are broad enough to contain all lin-ear difference equations in their intersection without any restrictions on thecoefficients. We discuss these important classes in Chapters 5 and 6.
The next example uses the ideas in Example 3.7 to show that a givendifference equation can have different order reduction types.

Semiconjugate Factorization 53
Example 3.8
(Different reduction types for the same equation) Consider the third-orderdifference equation
xn+1 = axn + bxn−1 + cxn−2, a, b, c ≥ 0, a+ b+ c = 1.
Since
xn+1 + (b+ c)xn + cxn−1 = xn + (b+ c)xn−1 + cxn−2
there is the form symmetry
H(xn, xn−1, xn−2) = xn + (b+ c)xn−1 + cxn−2
which gives a type-(1,2)reduction with SC factorization
tn+1 = tn,
xn+1 = tn+1 − (b + c)xn − cxn−1.
on the additive group of real numbers. In addition, we have
xn+1
xn= a+ b
xn−1
xn+ c
xn−2
xn= a+ b
xn−1
xn+ c
xn−1
xn
xn−2
xn−1
which gives the form symmetry
H(xn, xn−1, xn−2) =
[xn
xn−1,xn−1
xn−2
]
and a type-(2,1) reduction with SC factorization
tn+1 = a+b
tn+
c
tntn−1
xn+1 = tn+1xn.
on the multiplicative group of positive real numbers.
As noted in Remark 3.3 above, both of the conditions a, b, c ≥ 0 and a +b + c = 1 may be dropped after introducing the general methods in eitherChapter 5 or Chapter 6.
3.3.3 Reduction types (k, 1) and (1, k)
Of the k possible order reduction types
(k, 1), (k − 1, 2), · · · , (2, k− 1), (1, k)
for an equation of order k + 1 the two extreme ones, namely, (k, 1) and (1, k)have the extra appeal of having an equation of order 1 as either a factor or acofactor.

54 Form Symmetries and Reduction of Order
For a type-(k, 1) reduction, m = k. Therefore, the function h : G → G in(3.16) is of one variable and yields the form symmetry
H(u0, . . . , uk) = [u0 ∗ h(u1), u1 ∗ h(u2) . . . , uk−1 ∗ h(uk)] (3.27)
and SC factorization
tn+1 = gn(tn, tn−1, . . . , tn−k+1) (3.28)
xn+1 = tn+1 ∗ h(xn)−1 (3.29)
where the functions gn : Gk → G are determined by the given functions fn
in (3.1) as in Section 3.2. Example 3.8 above gives a type-(2,1) reduction fora third-order difference equation. In Chapters 4 and 5 we discuss substantialclasses of difference equations that have type-(k, 1) reductions together withtheir SC factorizations.
For a type-(1, k) reduction, m = 1. Therefore, h : Gk → G and the formsymmetry has the scalar form
H(u0, . . . , uk) = u0 ∗ h(u1, . . . , uk). (3.30)
This form symmetry gives the SC factorization
tn+1 = gn(tn) (3.31)
xn+1 = tn+1 ∗ h(xn, . . . , xn−k+1)−1. (3.32)
Example 3.8 above gives a type-(1,2) reduction for a third-order differenceequation. In Chapter 6 we discuss substantial classes of higher-order differenceequations having type-(1, k) reductions together with their SC factorizations.
3.3.4 Factor and cofactor chains
A difference equation such as (3.1) may admit repeated reductions of orderthrough its factor equation, its cofactor equation or both as follows:
Eq. (3.1) →
tn+1 = gn(tn, . . . , tn−m+1)︸ ︷︷ ︸factor equation
→{
factor → · · ·cofactor → · · ·
xn+1 = tn+1 ∗ h(xn, . . . , xn−k+m)−1
︸ ︷︷ ︸cofactor equation
→{
factor → · · ·cofactor → · · ·
In the above binary tree structure, we call each branch a reduction chain.If a reduction chain consists only of factor (or cofactor) equations then it is afactor (or cofactor) chain. As an example, consider the following rationaldifference equation of order three with its tree structure over a given nontrivialfield F :
xn+1 = xn +a(xn − xn−1)
2
xn−1 − xn−2→
tn+1 =
at2ntn−1
→{sn+1 = asn
tn+1 = sn+1tnxn+1 = tn+1 + xn
(3.33)

Semiconjugate Factorization 55
The two order reducing form symmetries defining the new variables tn andsn are apparent from the cofactor equations. In (3.33) it is easy to identifythe factor chain
xn+1 = xn +a(xn − xn−1)
2
xn−1 − xn−2→ tn+1 =
at2ntn−1
→ sn+1 = asn.
In the remainder of this book we encounter both factor and cofactor chains.In particular, every linear nonhomogeneous difference equation of order k+ 1with constant complex coefficients has the remarkable property that it canbe factored repeatedly down to a system of k + 1 linear nonhomogeneousequations of order one through either afactor chain (Chapter 5) or a cofactorchain (Chapter 6). In Chapter 7 the reader will find a comprehensive analysisof the SC factorizations and reductions in orders of linear nonhomogeneousequations, including those with variable coefficients.
3.4 SC factorizations as triangular systems
The pair of equations (3.18) and (3.19) that constitute a SC factorization ofEq. (3.1) have a special property in addition to each being of lower order.The factor equation (3.18) is entirely independent of the cofactor (3.19) andthe variables appear in a layered or “triangular” form; i.e., the variables in thefactor equation are a proper subset of the variables in the cofactor equationwhich can be restated as
xn+1 = gn(tn, . . . , tn−m+1) ∗ h(xn, . . . , xn−k+m)−1.
This feature uncouples the system of factor and cofactor equations in thefollowing sense: A solution of the factor equation (3.18) defines the sequence{tn+1} in the cofactor equation which then generates a solution {xn} of Eq.(3.1). In principle, this layering of variables permits solving (3.1) by solvingtwo lower order difference equations in turn, in the manner prescribed by thetriangular nature of the SC factorization.
Triangular systems may be defined generally and independently of SC fac-torizations. We give an intuitive definition here.
DEFINITION 3.7 A system of difference equations is triangular ora triangular system if, after a rearrangement of equations if necessary,the variables in each equation are a subset of the variables in the equationimmediately succeeding it. If the system has the equation with the least numberof variables on top then the system is in descending form and an equationthat succeeds another is below it. If the equation with the least number ofvariables is at the bottom then the system is in ascending form.

56 Form Symmetries and Reduction of Order
The SC factorization system of equations (3.18) and (3.19) is written in thedescending form. If we switch the two equations then an ascending form isobtained. We generally write the SC factorizations in the descending formunless preferable otherwise.
In the SC factorization of a difference equation of order greater than twothe factor or the cofactor equation may possess order-reducing form symme-tries. In this case, the new system of three equations is again triangular. Forinstance, consider Eq. (3.33) again. The three first order equations that markthe ends of factor/cofactor chains in (3.33) can be arranged as follows:
sn+1 = asn
tn+1 = asntn (3.34)
xn+1 = asntn + xn.
This is a triangular system in descending form. We emphasize that thetriangular system (3.34) is different from the system of three equations
xn+1 = xn +a(xn − yn)2
yn − zn
yn+1 = xn (3.35)
zn+1 = yn
that gives the unfolding of Eq. (3.33). While both systems consist of first-order equations, none of the equations in (3.35) are independent of each other.We may say that system (3.35) is more intertwined – or has a greater degreeof coupling – than (3.34). Obtaining an explicit formula for the solutions of(3.33) directly from (3.35) is more difficult.
For an equation of order k + 1 the SC factorization process may continueuntil it eventually stops in at most k steps, given that a first-order differenceequation cannot have order-reducing form symmetries. The result is a systemof lower order equations marking the ends of factor/cofactor chains.
If a SC factorization can be found for each lower-order equation in turnthen the original equation can be decomposed into a collection of first orderequations. In this case we call the final system of first-order equations a com-plete, or full SC factorization of the original higher-order equation. System(3.34) represents a complete SC factorization of Eq. (3.33).
Certain difference equations always have a complete SC factorization; theclass of linear nonhomogeneous equations with constant coefficients in an al-gebraically closed field is a familiar example that we will discuss in substantialdetail later in this book. Whether a complete SC factorization as a triangularsystem exists for every higher-order difference equation is an open questionthat is equivalent to the Semiconjugacy Problem.

Semiconjugate Factorization 57
3.5 Order-preserving form symmetries
Often a difference equation can be transformed into a more tractable equa-tion of the same order by means of a change of variables. For instance, thefollowing equations
xn+1 = xpnx
qn−1 and xn+1 =
xnxn−1
axn + bxn−1
of order 2 on (0,∞) can be transformed into linear equations of order 2 by thesubstitutions xn = eyn and xn = 1/yn, respectively; see the Problems for thischapter. Our aim in this section is to show that these types of substitutionsor changes of variables can be derived from semiconjugate relations.
If m = k + 1 in the preceding sections then the form symmetry H canno longer be “order-reducing” since the functions Fn and Φn both unfolddifference equations of the same order. In this case, a class of link functionsH that does not reduce the order is defined as follows
H(u0, . . . , uk) = [h0(u0), . . . , hk(uk)] (3.36)
Since the coordinate functions hj depend only on the time step of the sameindex in this case, the most distant time step k is preserved and the order ofthe difference equation is unchanged. To make H a SC link map and hence aform symmetry, a necessary restriction is supplied by the next result.
PROPOSITION 3.3
Suppose that H as defined by (3.36) is the SC link map of unfoldings Fn andΦn of difference equations, i.e., for each n there are functions fn and φn suchthat
Fn(u0, . . . , uk) = [fn(u0, . . . , uk), u0, . . . , uk−1]
Φn(u0, . . . , uk) = [φn(u0, . . . , uk), u0, . . . , uk−1].
Then all coordinate functions hj are equal, i.e., hj = hi for all i, j = 0, 1, . . .k.
PROOF If H is defined by (3.36) then
H(Fn(u0, . . . , uk)) = [h0(fn(u0, . . . , uk)), h1(u0), . . . , hk(uk−1)]
Φn(H(u0, . . . , uk)) = [φn(h0(u0), . . . , hk(uk)), h0(u0), . . . , hk−1(uk−1)].
If the left-hand sides are equal then from the right-hand sides we obtain
h0 = h1 = h2 = · · · = hk−1 = hk.

58 Form Symmetries and Reduction of Order
According to Proposition 3.3 the form symmetry H in (3.36) is determinedby a single one-dimensional map. On the other hand, it is unnecessary thatthe range of h be again G, a fact that is important if we wish to retain thesurjectivity of h (and hence of H) in the most common applications thatinvolve changes of variables. This observation and additional informationprovided by the proof of Proposition 3.3 suggest the following definition.
DEFINITION 3.8 Consider two difference equations of type (3.1) thatare defined by functions fn : Gk+1 → G and φn : Γk+1 → Γ where Γ is a givennontrivial group (usually a subgroup of G). A surjective map h : G→ Γ is anorder-preserving form symmetry if
h(fn(u0, . . . , uk)) = φn(h(u0), . . . , h(uk)). (3.37)
In many cases of interest, order-preserving form symmetries yield conjugateequivalents (i.e., H is a bijection); e.g., if G is finite and Γ = G. Thisequivalence is not unexpected for two difference equations of the same order.The map h in Definition 3.8 defines a change of variables
tj = h(uj), j = 0, 1, . . . , k.
If h is a bijection then using (3.37) we obtain the transformed functions as
φn(t0, . . . , tk) = h(fn(h−1(t0), . . . , h−1(tk))). (3.38)
Two common invertible choices for bijective h are the inverse or reciprocaltransformation and the real exponential (or logarithmic) functions. Using theinverse function in (3.38) we obtain
h(u) = u−1 ⇒ φn(t0, . . . , tk) = fn(t−10 , . . . , t−1
k ).
For G = R under addition and Γ = (0,∞) under multiplication, using theexponential function in (3.38) yields
h(u) = eu ⇒ φn(t0, . . . , tk) = e fn(ln t0,...,ln tk).
The next two examples illustrate the above choices. On the other hand,the complex exponential function h(u) = eiu is a form symmetry from theadditive group R to the multiplicative circle group T that is surjective butnot injective; recall Example 2.4. For another noninvertible (noninjective)example see the Problems for this chapter.
Example 3.9
Order-preserving form symmetries can be combined with order-reducing onesto simplify a given difference equation. Consider the rational difference equa-

Semiconjugate Factorization 59
tion
xn+1 = xn−k+1 +xn − xn−k
an(xn − xn−k) + bn(3.39)
where
an ≥ 0, bn > 0, x0 > x−k. (3.40)
The substitution yn = xn − xn−k defines an order-reducing form symmetryH(u0, . . . , uk) = u0 −uk which transforms (3.39) into the first-order equation
yn+1 =yn
anyn + bn, y0 = x0 − x−k > 0. (3.41)
Note that yn > 0 for all n ≥ 0 so Eq. (3.41) is defined over the multiplicativegroup G = (0,∞). The reciprocal function tn = 1/yn transforms the rationalequation into a linear one as follows:
1
tn+1=
1/tnan/tn + bn
⇒ tn+1 = an + bntn. (3.42)
Now it is possible to obtain an explicit formula for the solutions of (3.39)subject to (3.40) using the formula for the solutions of the linear equation(3.42); see the Problems for this chapter.
In the preceding example note that the map fn(u) = u/(anu+ bn) and thelinear map φn(t) = an + bnt are conjugates on (0,∞) for each n ≥ 1 throughh(u) = 1/u.
Example 3.10
Consider the following difference equation of order k+1 on the multiplicativegroup G = (0,∞)
xn+1 = anxpnx
qn−k (3.43)
subject to parameter values
k ≥ 0, p, q ∈ R, an > 0 for all n ≥ 0,
xi > 0 for i = −k, . . . , 0.
The substitution yn = lnxn which is represented by the form symmetryh(u) = lnu, transforms Eq. (3.43) into the linear nonhomogeneous equation
yn+1 = pyn + qyn−k + lnan (3.44)
which can be solved using classical methods; see the Problems for this chapter.

60 Form Symmetries and Reduction of Order
3.6 Notes
The concept of semiconjugacy that is not one-to-one (i.e., not a conjugacy) hasappeared in different contexts in the literature; see, e.g., Milnor and Thurston(1977), Byers (1983), Rothe (1992), and Akin (1993). Semiconjugacy is usedin an entirely new way in this book. There are several publications in whichone sees elements of this approach, and many of these studies are referred to inlater parts of this book. An earlier book that contains a more limited exposureto semiconjugacy is Sedaghat (2003). That book discusses situations in whichbehaviors of maps of higher-dimensional Euclidean spaces can be studied interms of the properties of one-dimensional maps that are semiconjugates tothe original maps. The current book’s focus is not on maps, but dependingon the underlying group, its ideas and methods are broader in nature, morepowerful and potentially more applicable in a greater variety of contexts.
Invariants are discussed in various publications; see, e.g., Kocic and Ladas(1993), Kulenovic and Ladas (2002), and Sedaghat (2003) and the referencescited in these books. In Sedaghat (2003) the similarities and differences amonginvariants, Liapunov functions, and semiconjugate relations are discussed insome detail and the relationships between these important concepts are high-lighted.
Triangular maps and systems are discussed in, e.g., Alseda and Llibre(1993), Smital (2008), and the references in these articles. In particular,the results in Alseda and Llibre (1993) give information about periods of so-lutions of difference equations that possess semiconjugate factorizations sincethe factor-cofactor system is always triangular.
3.7 Problems
3.1 Let F and Φ be self-maps of sets S and M , respectively, such that F D Φ.Prove each of the following statements:
(a) If F is surjective then Φ is surjective.
(b) If F is a constant function then Φ is a constant function.
3.2 (a) Let S and M be finite sets and let F,Φ be self-maps of S and M ,respectively. Prove that if F D Φ and Φ D F then F ' Φ.
(b) Let S be a finite set and F : S → S be a bijection. Prove that ifF D F−1 or F−1 D F then F ' F−1.
3.3 Let S = {1, 2, 3} and M = {a, b} with a 6= b.
(a) List all self-maps of S and of M and all surjective link mapsH : S →M.

Semiconjugate Factorization 61
(b) By directly computing each of the compositions H ◦F and Φ ◦H or byother means, determine those self-maps of S that are semiconjugate to someself-map of M.
3.4 Verify that the function HL in Example 3.3 is an invariant.
3.5 Let Z2 be as in Example 3.2 and consider the Fibonacci equation modulo2, i.e.,
xn+1 = xn + xn−1, x0, x−1 ∈ {0, 1}. (3.45)
(a) Verify that the functions H7 and H8 in Example 3.2 or Example 3.4 areinvariants for (the unfolding of) Eq. (3.45).
(b) Determine whether the unfolding of (3.45) has any other semiconjugatefactors on Z2.
3.6 Let k be a positive integer and forH : Zk2 → Z2 define its dual H∗ = H+1.
Note that H and H∗ have opposite values: H = 0 if and only if H∗ = 1.
(a) Identify the duals for the four maps ι, ξ0, ξ1 and ψ when k = 1.(b) Write each of the functions H1-H14 in Example 3.2 in algebraic form
using addition and multiplication in Z2 and identify the duals. For instance,H1(u, v) = uv for all (u, v) ∈ Z2
2 and H∗1 = H14.
(c) How many surjective maps H : Zk2 → Z2 are there for an arbitrary
k ≥ 1, excluding duals?(d) Let F : Zk
2 → Zk2 . Prove that H ◦ F = φ ◦ H for some φ : Z2 → Z2 if
and only if H∗ ◦ F = φ′ ◦H∗ for some φ′ : Z2 → Z2. Thus duals of SC linkmaps are also SC link maps.
3.7 Let k,m be positive integers and define the dual of F : Zk2 → Zm
2 as
F ∗ = [f1 + 1, . . . , fm + 1]
where fi : Zk2 → Z2 for i = 1, . . . , m are the coordinate functions of F. Note
that the values of F ∗ in Zm2 are opposite to those of F with 0’s and 1’s
switched.(a) Verify that (F ∗)∗ = F.
Define a function H : Zk2 → Z2 to be dual preserving if
H(u1 + 1, . . . , uk + 1) = H(u1, . . . , uk) + 1.
(b) Show that if H is dual preserving then so is its dual H + 1.(c) Which of the four self-maps ι, ξ0, ξ1 and ψ of Z2 are dual preserving?(d) Which of the functions H1-H14 in Example 3.2 are dual preserving?
(e) Prove that ifH is dual preserving then H ◦F ∗ = H∗◦F for each functionF : Zk
2 → Zm2 .
(f) Let F be a self-map of Zk2 and φ a self-map of Z2. If F D φ with respect
to a dual preserving map H then prove that F ∗ D φ∗ with the same link mapH.

62 Form Symmetries and Reduction of Order
3.8 (a) Show that the only link maps in Example 3.2 that can be written inthe recursive form u+ h(v) are H3, H6, H9 and H12. Determine the functionh in each case.
(b) Determine all distinct autonomous second-order difference equations onZ2 for which one of the functions in (a) is a form symmetry.
(c) Call two difference equations of order k+1 on Z2 dual equations if theirunfoldings are dual maps of Zk+1
2 . Which of the difference equations in (b)are duals?
3.9 Let {an} be an arbitrary binary sequence, i.e., an ∈ {0, 1} for all n ≥ 0.Consider the nonautonomous difference equation
xn+1 = an + xn−1, x0, x−1 ∈ {0, 1} (3.46)
which generalizes Eq. (3.23) when G = Z2.(a) Show that the same form symmetry as in Example 3.5 still works and
use Theorem 3.1 to obtain the SC factorization of (3.46). It is necessary todefine suitable time dependent functions fn on Z2
2 and φn on Z2.(b) Let an = 1 for all n ≥ k where k is a positive integer. Show that every
solution of (3.46) eventually has period 4 using the SC factorization in (a).(c) Let an = 0 for all n ≥ k where k is a positive integer. Determine the
asymptotic behaviors of solutions of (3.46) using the SC factorization in (a).
3.10 (a) Prove that each solution of a first-order, autonomous difference equa-tion tn+1 = g(tn) on Z2 must either be eventually constant or have period2.
(b) Let F be the unfolding of a second-order, autonomous difference equa-tion xn+1 = f(xn, xn−1) on Z2 and suppose that F D Φ for some self-map Φof Z2 (we do not assume that Theorem 3.1 applies). Prove that the solutionsof the second-order equation are eventually periodic with period p = 1, 2, 3,or 4 (p = 1 is interpreted as the constant solution).
3.11 Show that the third-order difference equation
xn+1 = xn +a(xn − xn−1)
2
xn − xn−2
has a complete SC factorization into a triangular system of first-order differ-ence equations. Determine the reduction tree and the factor or cofactor chainsfor this equation.
3.12 In Example 3.9 assume that an = a ≥ 0 and bn = b > 0 are constants.(a) Find the explicit formula for the solutions of Eq. (3.42).(b) Use the formula in (a) to find explicit formulas for the solutions of
equations (3.41) and (3.39).
3.13 In Example 3.10 assume that k = 1. Find the explicit formula for thesolutions of Eq. (3.44) on R and use this formula to obtain an explicit formulafor the solutions of Eq. (3.43) on G.

Semiconjugate Factorization 63
3.14 (a) Using the reciprocal transformation convert the difference equation
xn+1 =xnxn−k
axn + bxn−k, a, b ≥ 0, a+ b > 0. (3.47)
to a linear equation of the same order.(b) For k = 1 obtain an explicit formula for the positive solutions of Eq.
(3.47).
3.15 Let C0 be the set of all nonzero complex numbers and let h : C0 → (0,∞)be the modulus function h(z) = |z|. Recall that under ordinary multiplicationof complex numbers C0 is a group having (0,∞) as a subgroup.
(a) Show that h is an order preserving form symmetry for
zn+1 =azn
zn−k, k ≥ 1, a, z−j ∈ C0 for j = 0, 1, . . . , k. (3.48)
What are the functions fn and φn in Eq. (3.37)?(b) If {tn} is a solution of tn+1 = φn(tn, . . . , tn−k) with tn = h(zn) describe
the sets h−1(tn).(c) For k = 1, a = 1 + i, z0 = −2 and z−1 = i explicitly determine (i) the
solution {zn} of (3.48), (ii) the solution of tn+1 = φn(tn, tn−1), and (iii) thesets h−1(tn) that contain the numbers zn.

This page intentionally left blankThis page intentionally left blank

4
Homogeneous Equations of Degree One
In this chapter we discuss a special yet sizable class of recursive differenceequations of type
xn+1 = fn(xn, xn−1, . . . , xn−k) (4.1)
that possess semiconjugate factorizations on groups. This class of equationsis distinguished by the fact that the defining functions fn can be identified bya simple algebraic rule.
All difference equations encountered in this chapter belong to a much broaderclass of difference equations that admit type-(k, 1) reductions and are all char-acterized by the same form symmetry. We discuss this more general class inChapter 5 but devote this chapter to the discussion of the special case, whichis easier to understand and may serve as a preview of things to come.
4.1 Homogeneous equations on groups
In any group G we may define integer powers of elements as follows:
up =
u ∗ · · · ∗ u︸ ︷︷ ︸p times
, if p > 0
u−1 ∗ · · · ∗ u−1︸ ︷︷ ︸
|p| times
, if p < 0
1, if p = 0
.
The following concept, borrowed from the theory of functional equations,also makes sense in the group context.
DEFINITION 4.1 Let G be a nontrivial group and let p,m be integerswith m ≥ 1. If a function f : Gm → G satisfies the following
f(u1 ∗ t, . . . , um ∗ t) = f(u1 , . . . , um) ∗ tp, for all ui, t ∈ G
then f is said to be (right) homogeneous of degree p or an HDp function.If G is noncommutative then a “left version” can be defined analogously.
65

66 Form Symmetries and Reduction of Order
The developments below are stated for the right version; the parallel leftversions can then be inferred easily and need not be stated explicitly. There-fore, we drop mention of parity when referring to homogeneous functions orequations.
We are interested only in the case p = 1 of the above definition although wemay make occasional references to other values of p. Therefore, the followingdefinition is stated only for case p = 1.
DEFINITION 4.2 Equation (4.1) is said to be homogeneous of degree1, or HD1, on a group G if for every n = 0, 1, 2, . . . the functions fn are allhomogeneous of degree 1 relative to G. Therefore, (4.1) is an HD1 differenceequation if
fn(u0 ∗ t, . . . , uk ∗ t) = fn(u0, . . . , uk) ∗ tfor all t, ui ∈ G, i = 0, . . . , k, and all n ≥ 0.
Our first example indicates that HD1 equations can be quite general. Al-though commutativity of the group operation is not required, we assume itfor familiarity of notation.
Example 4.1
Let G be a commutative group and let ∆sn = sn −sn−1 denote the backwarddifference operator (see Remark 2.1 in Chapter 2). Then for any sequence offunctions gn : Gk+1 → G the difference equation
∆xn+1 = gn(∆xn,∆xn−1, . . . ,∆xn−k+1) (4.2)
is HD1 on G for every integer k ≥ 1. To see this, write Eq. (4.2) in theequivalent form
xn+1 = xn + gn(xn − xn−1, . . . , xn−k+1 − xn−k).
Now define
fn(u0, . . . , uk) = u0 + gn(u0 − u1, . . . , uk−1 − uk)
to see that for every t ∈ G,
fn(u0 + t, . . . , uk + t) = u0 + t+ gn(u0 − u1, . . . , uk−1 − uk)
= fn(u0, . . . , uk) + t.
It follows that (4.2) is HD1.
Example 4.2
Let F be a nontrivial field and let aj,n, bj,n ∈ F for j = 0, 1, . . . , k and alln ≥ 0. For nontriviality assume further that bk,n 6= 0 for all n. It is readily

Homogeneous Equations of Degree One 67
verified using definitions that every rational difference equation of type
xn+1 = xn−ja0,nxn + a1,nxn−1 + · · ·+ ak,nxn−k
b0,nxn + b1,nxn−1 + · · ·+ bk,nxn−k
is HD1 relative to the multiplicative group F\{0} of units of F for eachj = 0, 1, . . . , k.
Example 4.3
Let {an} and {bn} be sequences of real numbers and let j, k be positive inte-gers. Then it is easy to see that the difference equation
xn+1 = xn−j + ean(xn−xn−k)+bn
is HD1 relative to the additive group of all real numbers.
The next example concerns a generalization of the linear Eq. (3.26) inExample 3.7.
Example 4.4
Consider the difference equation
xn+1 = a0,nxn + a1,nxn−1 + · · ·+ ak,nxn−k + bn (4.3)
where the sequences {aj,n} for j = 0, 1, . . . , k are in a given field F withak,n 6= 0 for all n. If bn = 0 for all n, i.e., if Eq. (4.3) is linear homogeneousthen it is readily seen that it is an HD1 equation relative to the multiplicativegroup F\{0} of units of F .
Linear equations such as the above also have a HDp property for arbitrarybn if the coefficients aj,n are suitably restricted. For each integer p and eacht ∈ F define the element pt (or tp in multiplicative notation as in the beginningof this section) with F viewed as an additive group, i.e.,
pt =
t + t+ · · ·+ t︸ ︷︷ ︸p times
if p > 0
0, if p = 0(−t) + · · ·+ (−t)︸ ︷︷ ︸
|p| times
if p < 0.
According to Definition 4.1, (4.3) is HDp with respect to F (as an additivegroup) for every p if and only if the coefficient sequences {aj,n} for j =0, 1, . . . , k satisfy the following equality for every n:
a0,n + a1,n + · · ·+ ak,n = p1.

68 Form Symmetries and Reduction of Order
This claim is true because for all (u0, . . . , uk) ∈ Fk+1 and t ∈ F ,
a0,n(u0 + t) + a1,n(u1 + t) + · · ·+ ak,n(uk + t) + bn =
a0,nu0 + a1,nu1 + · · ·+ ak,nuk + bn + (a0,n + a1,n + · · ·+ ak,n)t =
a0,nu0 + a1,nu1 + · · ·+ ak,nuk + bn + pt.
An abundance of HD1 functions on groups is indicated in the next result.We leave the straightforward proof to the reader.
PROPOSITION 4.1
Let G be a nontrivial group and k a positive integer.(a) If g : Gk → G is any given function, then g : Gk+1 → G defined by
g(u0, . . . , uk) = g(u0 ∗ u−11 , u1 ∗ u−1
2 , . . . , uk−1 ∗ u−1k )
is a HD0 function and each of the following is HD1:
g(u0, . . . , uk) ∗ uj, j = 0, 1, . . . , m.
(b) If g1, g2 : Gk+1 → G and f : G2 → G are HD1 then so is the composition
f(g1(u0, . . . , uk), g2(u0, . . . , uk)).
(c) If f is HD1 and g is HD0 on Gk+1 then the product
fg(u0 , . . . , uk) = f(u0, . . . , uk) ∗ g(u0, . . . , uk)
is HD1.
4.2 Characteristic form symmetry of HD1 equations
As seen in Section 3.3.3, a type-(k, 1) reduction has a form symmetry givenby (3.27) with SC factorization given by the system (3.28) and (3.29). Wenow define a special form symmetry of this type.
DEFINITION 4.3 If h(u) = u−1 (i.e., the group inversion) in Eq. (3.27)in Section 3.3.3 then H is called the inversion form symmetry; i.e.,
H(u0, . . . , uk) = [u0 ∗ u−11 , u1 ∗ u−1
2 . . . , uk−1 ∗ u−1k ]. (4.4)

Homogeneous Equations of Degree One 69
An interesting feature of the inversion form symmetry (4.4) is that we canprecisely identify the class of all difference equations that have it. By thefollowing theorem, the HD1 property characterizes the inversion form sym-metry and its SC factorization completely. To avoid unnecessary repetition,we postpone the proof until Chapter 5 where it follows from a more generalresult.
THEOREM 4.1
Eq. (4.1) has the inversion form symmetry (4.4) if and only if fn is HD1relative to G for all n. In this case, (4.1) has a type-(k, 1) order-reductionwith the SC factorization
tn+1 = fn(1, t−1n , (tn ∗ tn−1)
−1, . . . , (tn ∗ tn−1 ∗ · · · ∗ tn−k+1)−1) (4.5)
xn+1 = tn+1 ∗ xn. (4.6)
PROOF See Corollary 5.3 in Section 5.3.
REMARK 4.1 1. From (4.6) we obtain the following formula for xn interms of a solution {tn} of (4.5) as follows:
xn =
n−1∏
i=0
tn−i ∗ x0 n = 1, 2, 3, . . . (4.7)
where the multiplicative notation is used for iterations of the group operation∗. In additive (and commutative) notation, (4.7) takes the form
xn = x0 +n∑
i=1
ti. (4.8)
2. We can quickly construct Eq. (4.5) directly from (4.1) in the HD1 case bymaking the substitutions
1 → xn, (tn ∗ tn−1 ∗ · · · ∗ tn−i+1)−1 → xn−i for i = 1, 2, . . . , k. (4.9)
Recall that 1 represents the group identity in multiplicative notation. Inadditive notation (4.9) takes the form
0 → xn, −tn − tn−1 · · · − tn−i+1 → xn−i for i = 1, 2, . . . , k. (4.10)

70 Form Symmetries and Reduction of Order
4.3 Reductions of order in HD1 equations
In this section we discuss several types of HD1 equations and their SC factor-izations using the inversion form symmetry. Our aim in part is to illustratethe variety of equations to which the methods of the previous section apply.In the next chapter we broaden our selection of equations after discoveringother types of form symmetries that permit generalizing the methods of thischapter to non-HD1 equations.
We begin with the following corollary of Theorem 4.1 and (4.9).
COROLLARY 4.1
Let i, j, k be nonnegative integers such that 0 ≤ i, j < k and let gn : G → Gbe given functions on a commutative group G for n ≥ 0. Then:
(a) The following difference equation is HD1
xn+1 = xn−i ∗ gn(xn−j ∗ x−1n−k). (4.11)
(b) If i ≥ 1 then Eq. (4.11) has a factor equation
tn+1 = (tn ∗ tn−1 ∗ . . . ∗ tn−i+1)−1 ∗ gn(tn−j ∗ tn−j−1 ∗ . . . ∗ tn−k+1).
For i = 0 the factor equation is
tn+1 = gn(tn−j ∗ tn−j−1 ∗ . . . ∗ tn−k+1).
(c) If k ≥ i+ 1 and j = k − i− 1 then Eq. (4.11) has a type-(k − i, i+ 1)order reduction as well with the following SC factorization
tn+1 = gn(tn−k+i+1),
xn+1 = tn+1 ∗ xn−i.
PROOF Parts (a) and (b) follow immediately from Theorem 4.1 and(4.9). Part (c) is easily seen to be true by first writing (4.11) as
xn+1 ∗ x−1n−i = gn(xn−k+i+1 ∗ x−1
n−k) (4.12)
and then substitutingtn = xn ∗ x−1
n−i−1
in (4.12).
Example 4.5
Consider the rational difference equation
xn+1 = xn
(anxn−k+1
xn−k+ bn
), (4.13)

Homogeneous Equations of Degree One 71
where {an}, {bn} are sequences of positive real numbers. This equation is aspecial case of (4.11) relative to the group (0,∞) under ordinary multiplica-tion. With i = 0, j = k − 1 and gn(u) = anu+ bn in Corollary 4.1 we obtainthe reduction of order of (4.13) to factor as
tn+1 = antn−k+1 + bn.
This linear nonhomogeneous equation with a time delay of k−1 can be solvedto obtain an explicit solution of (4.13) through (4.7), if desired.
Example 4.6
Consider the third-order equation
xn+1 = an + xn−1 + bnecn(xn−xn−2). (4.14)
This equation is HD1 on the group of all real numbers under addition and aspecial case of (4.11) with gn(u) = an + bne
cnu. The factor equation of (4.14)is
tn+1 = an − tn + bnecn(tn+tn−1). (4.15)
Eq. (4.15) is not HD1, but it has the identity form symmetry that isdiscussed in the next chapter. Thus a complete SC factorization of (4.14) intoa triangular system is possible.
Example 4.7
Let G = C\{0} be the group of nonzero complex numbers under ordinarymultiplication and let p, q be positive integers. If {an} is a sequence in G thenthe difference equation
xn+1 =anxn−p+1xn−p−q
xn−q(4.16)
is of the type defined in Corollary 4.1(c) with i = p− 1, k = p+ q and
gn(u) =an
u.
Thus (4.16) has the type-(q + 1, p) order reduction with the SC factorization
tn+1 =an
tn−q, xn+1 = tn+1xn−p+1. (4.17)
The basic type-(k, 1) factorization given by Corollary 4.1(b) is also possiblein Example 4.7 since Eq. (4.16) is HD1. However, the basic factorization isnot simpler or more advantageous. Also G can be any commutative group.

72 Form Symmetries and Reduction of Order
FIGURE 4.1
A solution of Eq. (4.16) with p = 5, q = 6, an = 1 for all n. This solutionwith initial values xj = (13 + j)/3 for j = −11,−10, . . . , 0 and all other
solutions of (4.16) have period 2(q + 1)p = 70; see the text.
There is another possible SC factorization for Eq. (4.16) based on the identityform symmetry that will be discussed in the next chapter.
REMARK 4.2 Factorization (4.17) yields some quick information aboutthe solutions of Eq. (4.16). In particular, if an = 1 for all n then all non-constant solutions of the factor equation in (4.17) are periodic with period2(q + 1). This indicates the existence of periodic solutions for (4.16) when pis odd; see the Problems for this chapter. This statement is not true for theslightly different rational recursive equation
xn+1 =anxn−pxn−p−q
xn−q(4.18)
which does not have a SC factorization of the type given in Example (4.7).However, (4.18) is clearly HD1 so Theorem 4.1 or Corollary 4.1(b) may beused to obtain a SC factorization.
Figures 4.1 and 4.2 show the different solutions of the two equations (4.16)and(4.18), respectively, with the same parameter values.
HD1 difference equations of higher-order can be obtained from any givendifference equation as follows: Let gn : Gk → G denote a sequence of functionson a group (G, ∗) and let
tn+1 = gn(tn, . . . , tn−k+1)

Homogeneous Equations of Degree One 73
FIGURE 4.2
A solution of Eq. (4.18) with p = 5, q = 6, an = 1 for all n and initial valuesxj = (13 + j)/3 for j = −11,−10, . . . , 0. To aid in visualizing both large and
small values, the double-log numbers L(xn) = log(log(xn + 1) + 1) areplotted rather than the actual values xn.
be a given difference equation of order k. If we substitute xn ∗ x−1n−1 for tn
in this equation then the following difference equation is HD1 by Proposition4.1(a)
xn+1 = gn(xn ∗ x−1n−1, . . . , xn−k+1 ∗ x−1
n−k) ∗ xn.
Clearly this construction can be repeated to obtain higher-order differenceequations in new variables, e.g., yn ∗ y−1
n−1 = xn. In particular, if G is com-mutative then the following equation is doubly HD1 with respect to the samegroup operation
yn+1 = gn(yn ∗ y−2n−1 ∗ yn−2, . . . , yn−k+1 ∗ y−2
n−k ∗ yn−k−1) ∗ y2n ∗ y−1
n−1.
The same construction works using different group operations. For instance,if F is a field and gn : Fk−1 → F is any sequence of functions then thedifference equation
tn+1 = tn−jgn
(tntn−1
, . . . ,tn−k+2
tn−k+1
)
is HD1 with respect to multiplication for any 0 ≤ j ≤ k − 1, by Proposition4.1(a). Using the operation + in the preceding construction with xn − xn−1
for tn yields the following equation
xn+1 = xn + (xn−j − xn−j−1)gn
(xn − xn−1
xn−1 − xn−2, . . . ,
xn−k+2 − xn−k+1
xn−k+1 − xn−k
)

74 Form Symmetries and Reduction of Order
that is HD1 with respect to addition. Reversing the roles of addition and mul-tiplication in the preceding discussion results in additional equations. Clearlythese constructions can be repeated to obtain higher-order difference equa-tions. Conversely, if a given equation is multiply HD1 with respect to one ormore group operations then its SC factors are also HD1, resulting in a factorchain of length two or greater.
Example 4.8
Consider the following difference equation of order three on the field of allreal numbers
xn+1 = xn +a(xn − xn−1)
2
xn−1 − xn−2, a 6= 0. (4.19)
As in the preceding discussion, substituting tn = xn−xn−1 (or using Theorem4.1) we obtain the SC factorization
tn+1 =at2ntn−1
, t0 = x0 − x−1, t−1 = x−1 − x−2 (4.20)
xn+1 = tn+1 + xn.
Note that tn 6= 0 for n ≥ −1 if initial values satisfy
x0, x−2 6= x−1. (4.21)
Relative to the group of all nonzero real numbers under multiplication, thesecond-order equation (4.20) is evidently HD1. Using Theorem 4.1 (or divid-ing both sides of this equation by tn and substituting rn = tn/tn−1) we obtainthe SC factorization
rn+1 = arn, r0 =t0t−1
tn+1 = rn+1tn.
We have therefore obtained a complete factorization of (4.19) into a trian-gular system of first-order equations:
rn+1 = arn
tn+1 = rn+1tn
xn+1 = tn+1 + xn.
This factorization readily gives the following formula for solutions of (4.19)subject to (4.21):
xn = x0 + t0
n∑
j=1
rj0a
j(j+1)/2, r0 =t0t−1
=x0 − x−1
x−1 − x−2.

Homogeneous Equations of Degree One 75
We leave the details of calculations to the reader.
Example 4.9
The following difference equation of order three is easily seen to be HD1relative to the multiplicative group of nonzero real numbers:
xn+1 =x2
nxn−1
anxnxn−2 + bnx2n−1
, an, bn ∈ R, an 6= 0 for all n.
From Theorem 4.1 we obtain the SC factorization
tn+1 =tntn−1
antn + bntn−1
xn+1 = tn+1 + xn.
The second-order factor equation above is again HD1 relative to the multi-plicative group of nonzero real numbers (hence, doubly HD1 relative to thesame group) so we get the factorization
rn+1 =1
anrn + bntn+1 = rn+1tn.
Example 4.10
A linear difference equation can be defined on any nontrivial field F as
xn+1 = a0,nxn + · · ·+ ak,nxn−k , aj,n ∈ F , ak,n 6= 0 (4.22)
for all n ≥ 1, 0 ≤ j ≤ k. The SC factorizations of general linear equationswith variable coefficients is discussed in Chapter 7. These equations have theHD1 property relative to the group of units F\{0} under multiplication. Ingeneral F\{0} is not invariant and solutions of (4.22) may contain zero terms.However, the solutions that do not contain any zero terms can be generatedthrough the factor equation
tn+1 = a0,n +a1,n
tn+
a2,n
tntn−1+ · · · ak,n
tntn−1 · · · tn−k+1. (4.23)
With tn = xn/xn−1, each solution of the linear equation (4.22) that doesnot contain the origin generates a solution of (4.23) and conversely. Thesingularity set of (4.23) consists of initial values that generate solutions of(4.22) with zero terms.
Eq. (4.23) may be called the Riccati difference equation (or the discreteRiccati equation) of order k because of its relationship to the higher-order

76 Form Symmetries and Reduction of Order
linear equation. In Chapter 7 we show that Riccati equations are closelyrelated to the SC factorizations of linear equations. Section 5.4 illustrateshow the known features of solutions of linear equations on the field R of realnumbers can be used to derive the various interesting properties of the Riccatiequation of order two on R.
Example 4.11
The following linear-like equations that are defined on R:
xn+1 = max{a0,nxn, . . . , ak,nxn−k }, (4.24)
xn+1 = min{a0,nxn, . . . , ak,nxn−k }, (4.25)
xn+1 = |a0,nxn + · · ·+ ak,nxn−k | . (4.26)
are readily verified to be HD1 on the multiplicative group (0,∞) of positivereal numbers and their SC factorizations are obtained similarly to the linearequation (4.22).
The following linear-like equations are HD1 on the additive group of all realnumbers:
xn+1 = xn−k1+ max{an(xn−k2
− xn−k3), bn(xn−k4
− xn−k5)} (4.27)
xn+1 = xn−k1+ min{an(xn−k2
− xn−k3), bn(xn−k4
− xn−k5)} (4.28)
and their SC factorizations are easily determined. In particular, if k1 = 0,k3 = k2 + 1 = j and k5 = k4 + 1 = k then the factor equation of (4.27) is
tn+1 = max{antn−j+1, bntn−k+1}
which is of type (4.24) above. Therefore, Eq. (4.27) is doubly HD1 withrespect to the two operations of R. The same comment applies to Eqs. (4.28)and (4.25).
As a final example of linear-like equations, consider the difference equation
xn+1 = xn + min{a(xn − xn−1), b(xn−k+1− xn−k)}, a, b > 0, k ≥ 2 (4.29)
on R. Being HD1 under addition the factor equation of (4.29) is found to be
tn+1 = min{atn, btn−k+1}. (4.30)
Eq. (4.30) is in turn HD1 on (0,∞) under multiplication and its factor equa-tion is found to be
rn+1 = min
{a,
b
rnrn−1 · · · rn−k+2
}.

Homogeneous Equations of Degree One 77
The next two examples discuss the SC factorizations of HD1 equations innoncommutative settings.
Example 4.12
Let G be the group of all invertible l × l matrices with real entries undermatrix multiplication. Consider the matrix equation
xn+1 = Axn−k+1x−1n−kxn, A, x0, x−1, . . . , x−k ∈ G. (4.31)
This equation is HD1 (from the right) since with the defining function
f(u0, . . . , uk) = Auk−1u−1k u0
it follows that for every matrix t ∈ G,
f(u0t, . . . , ukt) = Auk−1t(ukt)−1u0t = Auk−1u
−1k u0t = f(u0, . . . , uk)t.
Now using (4.9) or by rewriting (4.31) as xn+1x−1n = Axn−k+1x
−1n−k, the SC
factorization is
tn+1 = Atn−k+1, t−j = x−jx−1−j−1, j = 0, 1, . . . , k − 1 (4.32)
xn+1 = tn+1xn. (4.33)
The linear factor equation (4.32) can be solved to obtain
tn = Amti where m, i are integers such that (4.34)
n = km+ i, 0 ≤ i < k.
We leave the details of calculation to the reader. Using this solution in thecofactor (4.33) yields the corresponding solution of (4.31). In the special casek = 1, tn = Ant0 so that we obtain the formula
xn = Ant0An−1t0 · · ·At0x0.
This solution can be simplified further if the initial value matrix t0 = x0x−1−1
commutes with the coefficient matrix A. In this case the solution reduces to
xn = An(n−1)/2tn0x0.
It is worth noting that generating a solution of (4.31) directly by iterationmay not be very inspiring unless we can identify and substitute for the formsymmetry as we go forward. We also note that rearranging the terms in theright-hand side of (4.31) may result in a non-HD1 equation. For example,
xn+1 = Axnxn−k+1x−1n−k

78 Form Symmetries and Reduction of Order
is not HD1 either from the right or from the left (but also see the next exam-ple).
Example 4.13
Consider the following variation of (4.31) on the group G of all invertible l× lmatrices with real entries under matrix multiplication:
xn+1 = Axnx−1n−kxn−k+1, A, x0, x−1, . . . , x−k ∈ G. (4.35)
As in the preceding example, it can be shown that this equation is HD1. Weshow that (4.35) has two different order reductions. In addition to the type-(k, 1) reduction due to the HD1 property, there is also a type-(1, k) reduction.For the latter, rewriting (4.35) as
xn+1x−1n−k+1 = Axnx
−1n−k
reveals the form symmetry H(u0, . . . , uk) = u0u−1k which is a scalar function
on Gk+1. The substitution rn = xnx−1n−k gives the SC factorization
rn+1 = Arn,
xn+1 = rn+1xn−k+1.
This type-(1, k) reduction belongs to the variety of order reductions that isdiscussed in Chapter 6. By way of comparison, the SC factorization for thetype-(k, 1) reduction is calculated using (4.9) as
tn+1 = At−1n−k+1,
xn+1 = tn+1xn
and it has the form symmetry specified in Theorem 4.1.
The next example illustrates the importance of the specific group structurein reducing the order of a difference equation.
Example 4.14
Let Zm be the finite ring of integers modulo m where both addition andmultiplication are modulo m and consider the difference equation
xn+1 = xn + (m− 2)pxnxn−1 + px2n + px2
n−1, p ∈ {0, 1, . . . , m− 1}. (4.36)
This equation is HD1 relative to the additive group (Zm,+). To see this, let
f(u0 , u1) = u0 + (m− 2)pu0u1 + pu20 + pu2
0, (4.37)
and note that because m−2 is in fact the additive inverse −2 in Zm, we have
f(u0 + t, u1 + t) = u0 + t+ p[(u0 + t) − (u1 + t)]2
= u0 + t− 2u0u1 + pu20 + pu2
1
= u0 + (m− 2)u0u1 + pu20 + pu2
1 + t
= f(u0, u1) + t.

Homogeneous Equations of Degree One 79
Thus, using (4.10) or rewriting (4.36) as
xn+1 − xn = p(x2n − 2xnxn−1 + x2
n−1) = p(xn − xn−1)2
we obtain the SC factorization
tn+1 = pt2n, t0 = x0 − x−1, (4.38)
xn+1 = tn+1 + xn.
Note that this SC factorization is not valid in Zj if j 6= m and also not valid
if (4.36) is taken over rings such as Z or R.
4.4 *Absolute value equation
In order to illustrate that simple HD1 difference equations are capable ofgenerating a rich variety of solutions on familiar, one-dimensional groups,this section presents a detailed study of the set of solutions of a second-order difference equation that is HD1 on the multiplicative group of positivereal numbers. The solutions of this absolute value equation can be fruitfullystudied using its SC factorization and the resulting pair of first-order equations(the factor and the cofactor). This section contains a substantial amount ofdetailed analysis and a number of intriguing results but because this materialis not essential to understanding SC factorization and reduction of order, thissection may be omitted without loss of continuity.
Consider the autonomous, second-order absolute value difference equation
xn+1 = |axn − bxn−1|, a, b ≥ 0, a+ b > 0, n = 0, 1, 2, . . . (4.39)
We may assume without loss of generality that the initial values x−1, x0
in Eq. (4.39) are nonnegative and for nontriviality, at least one is not zero.This equation is clearly HD1 on the multiplicative group (0,∞) and its factorequation is easily calculated as
rn+1 =
∣∣∣∣a−b
rn
∣∣∣∣ , n = 0, 1, 2, . . . (4.40)
with a cofactor equationxn+1 = rn+1xn. (4.41)
We may think of (4.40) as the one-dimensional recursion rn+1 = φ(rn)where φ is the piecewise smooth mapping
φ(r) =
∣∣∣∣a−b
r
∣∣∣∣ , r > 0.

80 Form Symmetries and Reduction of Order
Although (4.39) is a rather simple equation, we see in this section that itexhibits interesting dynamics for certain values of the parameters a, b. Byway of comparison, consider other simple HD1 equations such as
un+1 = aun + bun−1
vn+1 = max{avn, bvn−1} (4.42)
wn+1 = min{awn, bwn−1}
that are related to (4.39) through
|α− β| = 2 max{α, β} − (α+ β) = max{α, β} − min{α, β}.
In contrast to (4.39), each of the equations in (4.42) produces solutions withsimple behaviors for all parameter values a, b. Some indication of the majordifference between these equations and (4.39) may be had by looking at theirsemiconjugate factor equations with rn = xn/xn−1:
φu(r) = a +b
r, φv(r) = max
{a,b
r
}, φw(r) = min
{a,b
r
}. (4.43)
It is evident from a quick examination of these mappings that only the fac-tor φ, which was defined for (4.39), is capable of generating complex behavioron the half-line. Indeed, an important feature of φ is that it is nonsmooth atits critical point, the minimum value of zero occurring at b/a, whose pre-imageis the origin, i.e., the point of discontinuity of φ. This source of complexityis lacking in the factors φu, φv and φw all of which are monotonically nonin-creasing maps.
The region b ≤ a2/4 and the fixed points of φ
The mapping φ always has a fixed point r through its left half
φL(r) =b
r− a, 0 < r ≤ b
a
(see Figure 4.3). Solving φL(r) = r gives the value of r as
r =1
2
[√a2 + 4b− a
].
It may be noted that r is an unstable fixed point for all positive values ofa, b, since
|φ′L(r)| =
b
r2=
b
b − ar> 1.
The right half of φ, namely,
φR(r) = a − b
r, r ≥ b
a

Homogeneous Equations of Degree One 81
FIGURE 4.3
A graph of the factor function φ, its left and right halves and its fixed pointswhen b ≤ a2/4.
can have up to two fixed points if the equation φR(r) = r has positive solu-tions; see Figure 4.3. Solving the latter equation yields two values
r∗1 =1
2
[a −
√a2 − 4b
], r∗2 =
1
2
[a +
√a2 − 4b
]
both of which are real if and only if b ≤ a2/4. Stated differently, φ has upto two additional fixed points for all points (a, b) on or below the parabolab = a2/4 in the parameter plane. On this parabola,
r∗1 = r∗2 =a
2
and the single fixed point of φ is semi-stable. In the sub-parabolic regionb < a2/4 we find that
b
a< r∗1 < r∗2
with r∗1 unstable and r∗2 asymptotically stable as may be readily verified, e.g.,by calculating the derivative values φ′
R(r∗1), φ′R(r∗2). The tangent bifurcation of
the factor map φ that produces r∗1 , r∗2 when a parameter point (a, b) crosses the
parabola b = a2/4 corresponds, via the cofactor equation (4.41), to significantbehavioral changes in the solutions of (4.39) as well.
Figure 4.4 shows the parameter plane. We begin our examination of so-lutions when (a, b) is in the sub-parabolic region b ≤ a2/4 of the parameterplane with the following lemma whose straightforward proof is omitted.

82 Form Symmetries and Reduction of Order
FIGURE 4.4
The (a, b) parameter plane and regions defined by the parabola b = a2
4and
the line b = a− 1; see the text for details.
LEMMA 4.1
Let b ≤ a2/4.
(a) r∗2 ≤ a with equality holding if and only if b = 0.
(b) Let a < 2. Then r∗1 < 1; also r∗2 < 1 if and only if b > a− 1. Further,r∗2 = 1 if b = a− 1.
(c) Let a ≥ 2. Then r∗2 ≥ 1; also r∗1 ≤ 1 if and only if b ≤ a− 1. Further,r∗1 = 1 if b = a− 1.
In Lemma 4.1 notice that the line b = a − 1 in the parameter plane istangent to the parabola b = a2/4 at a = 2; see Figure 4.4.
LEMMA 4.2
Let b ≤ a2/4 and let {xn} be a solution of (4.39) such that xk ≥ r∗1xk−1 forsome integer k ≥ 0.
(a) If b 6= a2/4 then there are real constants c1, c2 such that
xn = c1(r∗1)
n + c2(r∗2)n, n ≥ k. (4.44)
(b) If b = a2/4 then there are real constants c1, c2 such that
xn = (c1 + c2n)(a/2)n, n ≥ k (4.45)
with r∗1 = r∗2 = a/2.
PROOF By hypothesis, rk = xk/xk−1 ≥ r∗1. If rn = φ(rn−1) for n > k,

Homogeneous Equations of Degree One 83
then since rn ≥ r∗1 for n ≥ k, we may write
xn+1
xn= rn+1 = φR(rn) = a− bxn−1
xn
i.e., xn+1 = axn − bxn−1 for n ≥ k. The eigenvalues of the preceding linearequation are none other than r∗1 and r∗2 so (4.44) or (4.45) holds as appropriate
for n ≥ k and suitable constants c1, c2.
THEOREM 4.2
Let a < 2.
(a) If a−1 < b ≤ a2/4 then every nontrivial solution of Eq. (4.39) convergesto zero eventually monotonically.
(b) If b = a − 1 then every solution of(4.39) converges to a nonnegativeconstant eventually monotonically.
(c) If b < a − 1 with a > 1 then any solution {xn} of Eq. (4.39) for whichxk > r∗1xk−1 for some integer k ≥ 0 is unbounded and strictly increasingeventually. On the other hand, if a solution of (4.39) is bounded, then it isstrictly decreasing to zero; such solutions do exist.
PROOF (a) First, let {xn} be a positive solution of (4.39), i.e., xn > 0for n ≥ −1. Then the sequence {rn} where rn = φ(rn−1) and r0 = x0/x−1 iswell defined for all n. If xn < r∗1xn−1 for all n ≥ 0 then xn → 0 as n → ∞because r∗1 < 1 by Lemma 4.1. Otherwise, xk ≥ r∗1xk−1 for some k ≥ 0 soby Lemma 4.2, (4.44) or (4.45) holds as appropriate and since r∗2 < 1 theproof is completed. Next, suppose that xm = 0 for some m ≥ −1. Thenxm+2 = axm+1 and therefore,
rm+2 =xm+2
xm+1= a.
By Lemma 4.1, r∗2 ≤ a so rm+2 ≥ r∗2 > r∗1 . Letting k = m+ 2 and applyingthe above argument once more we obtain (4.44) or (4.45) and complete theproof.
(b) Here r∗2 = 1 and r∗1 < 1; the proof is similar to that for Part (a).
(c) With r∗2 > 1 > r∗1 , if {xn} is a solution with rk = xk/xk−1 > r∗1 forsome k, then apply Lemma 4.2 with (4.44) to show that {xn} is unboundedand eventually increasing. This argument also shows that if {xn} is bounded,then it has to be strictly decreasing with xn ≤ r∗1xn−1 for all n ≥ 0. It is clearin this case that xn → 0 as n → ∞. Finally, to verify that the latter type ofsolution does exist, let x0/x−1 = r0 belong to either of the sets
B =
∞⋃
i=0
φ−i(r), B1 =
∞⋃
i=0
φ−i(r∗1)

84 Form Symmetries and Reduction of Order
of backward iterates of r or r∗1 respectively under the inverse map φ−1. Thenrn = r < 1 or rn = r∗1 < 1 for all large n and xn converges to zero exponen-
tially.
LEMMA 4.3
(a) r ≥ 1 if and only if b ≥ a+ 1 with r = 1 if b = a+ 1.(b) If r ≥ 1 and b ≤ a2/4 then a ≥ 2 +
√8 ≈ 4.828.
Note that the line b = a+1 in the parameter plane intersects the boundaryparabola at a = 2 +
√8. Further, on both of the lines b = a ± 1, (4.39) is
degenerate in the sense that if x−1 = x0 then xn = x0 for all n ≥ 0. Inparticular, the origin is not the only fixed point of (4.39).
THEOREM 4.3
Let a ≥ 2 and b ≤ a2/4.(a) Any solution {xn} of(4.39) for which xk > r∗1xk−1 for some integer
k ≥ 0 is unbounded and strictly increasing eventually.(b) If b < a + 1, then there are solutions of (4.39) that converge to zero
eventually monotonically, and if b = a± 1, then there are also solutions thatare eventually constant and positive.
PROOF (a) This is proved similarly to Theorem 4.2(c), the only differencebeing that here it is possible that r∗1 ≥ 1.
(b) If b < a + 1, then by Lemma 4.3, r < 1 so if x0/x−1 = r0 ∈ B whereB is the set of backward iterates defined in the proof of Theorem 4.2(c), thenxn → 0 eventually monotonically. If b = a + 1, then r = 1 so r0 ∈ B impliesthat rn = 1 for all large n and thus xn is eventually constant. For b = a− 1it is the case that r∗1 = 1 so letting r0 ∈ B1 we obtain an eventually constant
solution.
The region b > a2/4 and the periodic points of φ
In this region, fixed points such as r∗1 and r∗2 do not exist; see Figure 4.5.The absence of such fixed points mandates the use of different tools and
methods. In particular, periodic solutions present themselves as interestingsubstitutes for the missing fixed points. We observe that a positive, p-periodicsolution {xn} of (4.39) induces a periodic ratio sequence {xn/xn−1} of thesame period that satisfies the identity
p∏
i=1
xi
xi−1= 1.
It follows that positive, period-p solutions of (4.39) correspond in a one-to-one fashion to the p-cycles {rn} of (4.40) with the property that
∏pi=1 ri = 1.

Homogeneous Equations of Degree One 85
FIGURE 4.5
A graph of the factor function φ when b > a2/4. The fixed points r∗1 and r∗2are absent now but periodic points exist; e.g., r1, r2 that are the fixed
points of the iterate φ2.
We begin with the next lemma, which shows in particular that unlike thefixed points r∗1 and r∗2 , we can always expect to find 2-cycles for (4.40) for allpoints in the parameter plane.
LEMMA 4.4
(a) For fixed a, b > 0,(4.40) has a unique 2-cycle {r1, r2} where
r1 =b
a−
√a4 + 4b2 − a2
2a, r2 =
b
a+
√a4 + 4b2 − a2
2a. (4.46)
(b) For fixed a2 > b > 0,(4.40) has a unique 3-cycle {r1, r2, r3} where
r2 = φL(r1) <b
a, r3 = φL(r2) >
b
a, r1 = φR(r3) <
b
a
and r1 is given by
r1 =a(a2 + 3b) −
√a2(a2 + b)2 − 4b3
2(a2 + b). (4.47)
PROOF (a) If {r1, r2} is a 2-cycle of (4.40) with r1 < r2, then it is the casethat r1 < b/a < r2. This is true because φR is increasing and also φ2
L(r) = rimplies that r = r. Hence both r1 and r2 cannot be on one side of b/a. Now

86 Form Symmetries and Reduction of Order
setting r2 = φL(r1) and r1 = φR(r2) gives
r1 = a− b
φL(r1)= a− br1
b− ar1=ab− (a2 + b)r1
b− ar1.
Solving the above equation for r1 we obtain the value in (4.46) as the onlysolution in the interval (0, b/a). Then r2 = φL(r1) is the other value (4.46).
(b) We calculate the 3-cycle indicated in the statement of the lemma sim-ilarly to Part (a), although the algebraic manipulations are more extensive.The unique value for r1 ∈ (0, b/a) in the form (4.47) is defined only when theexpression under the square root is nonnegative; i.e., r1 exists if and only if
a(a2 + b) ≥ 2b3/2.
This inequality can be written as a cubic polynomial inequality in a
a3 + ab− 2b√b ≥ 0.
Noting that a =√b is a root of the polynomial on the left-hand side, we
have a factorization
(a −√b)(a2 + a
√b+ 2b) ≥ 0.
Since the quadratic factor is positive for a, b > 0 we conclude that r1 (hencealso the 3-cycle) exist when a ≥
√b or equivalently, a2 ≥ b. If the equality
holds, then we calculate from (4.47)
r1 = a =b
a
where the last equality is equivalent to b = a2. However, b/a maps to zeroand cannot be a periodic point of φ; therefore, the strict inequality a2 > bmust hold.
In Lemma 4.4 we point out that b > 0 because it is necessary that r1 > 0in both (4.46) and (4.47). We need one more lemma before presenting ourmain theorem on periodicity. The next lemma concerns solutions that containzeros, i.e., they “pass through the origin” repeatedly. Note that such solutionscannot be represented by the mapping φ.
LEMMA 4.5
Assume that b > 0 and let {xn} be a solution of (4.39) such that xk = 0 forsome k ≥ 0 and xk−1 > 0.
(a) If xk+2 = 0, then a = 0 and xk+2n−1 = bnxk−1 for n = 1, 2, 3, . . .(b) If xk+3 = 0, then a2 = b and xk+n = an+1xk−1 for n 6= 3j, j = 1, 2, 3, . . .
PROOF (a) We have xk+1 = bxk−1 > 0 and 0 = xk+2 = axk+1. Thusa = 0 and the stated formula is easily established by induction on n.

Homogeneous Equations of Degree One 87
(b) Since xk+3 = |axk+2 − bxk+1| = 0, it follows that axk+2 = bxk+1 6= 0.In particular, a 6= 0 and xk+2 6= 0. In fact,
xk+2 = axk+1 = abxk−1
so0 = xk+3 = b|a2 − b|xk−1
and it follows that b = a2. We may now write xk+1 = a2xk−1 and xk+2 =a3xk−1. Further,
xk+4 = bxk+2 = a5xk−1,
xk+5 = axk+4 = a6xk−1.
Induction on n now completes the proof.
THEOREM 4.4
(a) Eq.(4.39) has a period-2 solution if and only if
b2 − a2 = 1 or equivalently b =√a2 + 1 for a ≥ 0. (4.48)
Further, if a > 0, then the period-2 solutions are positive and confined to thepair of lines y = r1x and y = r2x in the state-space (or the phase plane),where r1, r2 are given by
r1 =b− 1
a, r2 =
b+ 1
a(4.49)
(see Figure 4.7). On the other hand, the only period-2 solutions of (4.39) thatpass through the origin occur at a = 0 where b = 1.
(b) Eq.(4.39) has a period-3 solution if and only if
a3 + ab− b3 = 1, a ≥ 1. (4.50)
Further, if a > 1, then the period-3 solutions are positive and confined to thethree lines y = rix in the state-space (or the phase plane) where for i = 1, 2, 3,ri are given by
r1 =ab+ 1
a2 + b, r2 =
b2 − a
ab+ 1, r3 =
b+ a2
b2 − a(4.51)
(see Figure 4.8). On the other hand, the only period-3 solutions of (4.39) thatpass through the origin occur at a = 1 where b = 1 also.
PROOF (a) First, let us assume that a > 0 and use (4.46) to compute
r1r2 =1
2
[√a4 + 4b2 − a2
]. (4.52)

88 Form Symmetries and Reduction of Order
Setting r1r2 = 1 and simplifying, we obtain the hyperbola (4.48) in theparameter plane. Next, using (4.48) we may simplify the formulas in (4.46)to obtain the values in (4.49). For parameter values on the quadratic curve(4.48), if x0/x−1 equals either r1 or r2 then φ(x0/x−1) = r2 and φ(x1/x0) = r1or conversely, so the corresponding solution {xn} of (4.39) with period 2 isconfined to the lines y = r1x and y = r2x in phase space.
Now consider the case a = 0 in (4.48). Although r1, r2 are not defined, itis clear that for (a, b) = (0, 1) every solution of (4.39) has period 2 and byLemma 4.5(a) these include all the period-2 solutions that pass through theorigin. Since every positive period-2 solution of (4.39) induces a 2-cycle in theratios, it follows from Lemmas 4.4 and 4.5 that there are no other period-2solutions of (4.39) than the ones already mentioned.
(b) With r1 given by (4.47) and
r2 = φL(r1) =b− ar1r1
, r3 = φL(r2) =(a2 + b)r1 − ab
b− ar1
we see that
r1r2r3 = (a2 + b)r1 − ab =1
2
[a(a2 + b) −
√a2(a2 + b)2 − 4b3
]. (4.53)
Setting r1r2r3 = 1 and re-arranging terms, gives the equation√a2(a2 + b)2 − 4b3 = a(a2 + b) − 2 (4.54)
which can hold only when (i) a(a2 + b) − 2 ≥ 0 or equivalently, b ≥ 2/a− a2
and (ii) b < a2 so that the square root is real and r1 > 0. The curve 2/a−a2 isstrictly decreasing and intersects the parabola b = a2 at a = 1. It follows that(4.54) holds for a > 1. Now, if we square both sides of (4.54) and simplify,we get the cubic equation in (4.50). This equation in turn may be used tosimplify the values r1, r2, r3 in Lemma 4.4(b) to get the values in (4.51). Itfollows from Lemma 4.4 that positive period-3 solutions of (4.39) exist if andonly if the parameters a, b satisfy (4.50) with a > 1 and in this case thesolution in the phase space is confined to the three straight lines mentionedin the statement of the theorem.
Next, consider a = 1 in (4.50). Here b = 1 also so Lemma 4.5(b) shows that
all period-3 solutions that pass through the origin are accounted for.
In Figure 4.6 we see that the quadratic curve (4.48) intersects the cubiccurve (4.50) in the (a, b) parameter plane at a point where the given valueof, say, a generates both a 2-cycle and a 3-cycle of φ at the same value ofb. At other points on each of the two curves, the value of b generating a 2-cycle is different from that generating a 3-cycle for the same value of a. Thecoordinates of the intersection point seen in Figure 4.6 are easily determinedby inserting b =
√a2 + 1 in (4.50) and solving for a as follows:
a3 + a√a2 + 1 − (a2 + 1)
√a2 + 1 = 1
(a2 − a+ 1)√a2 + 1 = a3 − 1.

Homogeneous Equations of Degree One 89
FIGURE 4.6
Curves of periodic points of φ in the (a, b) parameter plane; see Theorem 4.4.
Taking note of the fact that a > 1 and a2 − a + 1 > 0 and squaring bothsides yields
(a4 − 2a3 + 3a2 − 2a+ 1)(a2 + 1) = a6 − 2a3 + 1. (4.55)
Now simplifying the above expression we get
a4 − 2a3 + a2 − 2a+ 1 = 0. (4.56)
Comparing the left-hand side of this equality with the similar expressionon the left of (4.55) shows that (4.56) is equivalent to
(a2 − a+ 1)2 − 2a2 = 0.
From this we readily obtain
a =1
2
(√2 + 1 +
√2√
2 − 1
)≈ 1.8832
andb =
√a2 + 1 ≈ 2.1322.
Figures 4.7 and 4.8 illustrate the 2-cycles and 3-cycles in Theorem 4.4 usingthe preceding values of a, b at the intersection point.

90 Form Symmetries and Reduction of Order
FIGURE 4.7
A 2-cycle of the absolute-value equation with its locus of two lines instate-space; see the text for parameter values.
FIGURE 4.8
A 3-cycle of the absolute-value equation with its locus of three lines instate-space; see the text for parameter values.

Homogeneous Equations of Degree One 91
FIGURE 4.9
The various curves in the parameter plane discussed in Theorem 4.5.
As the preceding results show, periodic ratios are useful in answering variousquestions about the dynamics of (4.39). The next result is another exampleof this usage.
THEOREM 4.5
Let b > a2/4.
(a) If b ≤ (a2 + a)/(a + 2) then there are solutions of (4.39) that convergeto zero eventually monotonically.
(b) If (a2 + a)/(a+ 2) < b <√a2 + 1 then for all a ≥ 0 there are solutions
of (4.39) that converge to zero in an oscillatory fashion.
(c) If b >√a2 + 1 then for all a ≥ 0 there are solutions of (4.39) that are
oscillatory and unbounded. However, if b < a+1, then there are also solutionsthat converge to zero monotonically (eventually monotonically if b < 2a2).
(d) If b = a, then for all a > 0 there are solutions of (4.39) that convergeto zero in an oscillatory fashion as well as solutions that converge to zeroeventually monotonically.

92 Form Symmetries and Reduction of Order
PROOF (a) and (b): Setting r2 ≤ 1 in (4.46) and simplifying gives
b ≤ a2 + a
a + 2(4.57)
with equality holding if and only if r2 = 1. Using (4.48) we find that r1r2 < 1if and only if b <
√a2 + 1. Further, for a > 0, we have
√a2 + 1 > a whereas
(a2 + a)/(a + 2) < a. It follows that the region in Part (b) is nonempty andin there, r1r2 < 1 but r2 > 1. Hence, if e.g., x0/x−1 = r1 then the ratiosequence is 2-periodic. In this case, x1 = r2x0 > x0 while x2 = r1r2x0 < x0.Inductively, for all n ≥ 1, it follows that
x2n−1 > r2r1x2n−1 = r2x2n = x2n+1 > x2n > r1r2x2n = x2n+2.
It is clear that {xn} in this case converges to zero in an oscillatory fashion.This proves statement (b); we also note that the region of the parameter planein this case contains a part of the unit square. On the other hand, if (4.57)holds, then both r2 and r1r2 are less than unity and the solution {xn} withx0/x−1 = r1 converges to zero monotonically. This concludes the proof ofPart (a).
(c) In this case r1r2 > 1 so solutions of (4.39) with x0/x−1 = r1 are un-bounded and they oscillate because r1 < 1. In fact, this last inequality holdsprovided that b > (a2 − a)/(2a− 1) which is true because
(a2 − a)/(2a− 1) = a[(a− 1)/(2a− 1)] < a <√a2 + 1 < b.
If b < a + 1, then by Lemma 4.3, r < 1 so if x0 = rx−1 then xn = rxn−1 forall n and {xn} converges to zero monotonically. If also b < 2a2 (possible fora > [(1 +
√17)/8]1/2) then we find that r < a so that φ−1(r) is not empty.
In this case, we can find solutions {xn} of (4.39) where there is k ≥ 0 suchthat xk = rxk−1 and thus {xn} converges to zero eventually monotonically.Note that these conclusions extend similar ones made in Theorem 4.3(b) forthe region b ≤ a2/4.
(d) The line b = a in the parameter space lies within the region in Part(b) so there are solutions of (4.39) in this case that converge to zero in anoscillatory fashion. Further, b < a + 1 so r < 1 and if {xn} is a solutionof (4.39) with x0/x−1 in the set B of backward iterates of r under φ, thenxn = rxn−1 for all sufficiently large n. Clearly, such {xn} converges to zero
eventually monotonically.
If we raise the lower limit in Theorem 4.5(c) to b > a + 1 the followingstronger conclusion is obtained.
THEOREM 4.6
Let b > a2/4. If b > a + 1, then every solution of (4.39) is unbounded. If asolution {xn} has the property that xk ≤ xk−1 for some k ≥ 0 then {xn} is

Homogeneous Equations of Degree One 93
unbounded and oscillatory. There are also unbounded solutions of (4.39) thatare monotonically increasing.
PROOF Since the case a = 0 is discussed in Lemma 4.5, we assume fromhere on that a > 0. Define c = b − a and note that c > 1. Let {xn} be anonzero solution of (4.39) where there is k ≥ 0 such that xk ≤ xk−1. Then
xk+1 = |bxk−1 − axk| = |cxk−1 − a(xk − xk−1)| ≥ cxk−1 ≥ cxk > xk. (4.58)
Notice that a decrease is always followed by an increase in such a waythat the post-decrease high value xk+1 ≥ cxk−1 with xk−1 representing thepre-decrease high.
Next, xk+2 = |cxk − a(xk+1 − xk)| and here are two possible cases: If
xk+2 = cxk − a(xk+1 − xk) (4.59)
then clearly xk+2 < cxk ≤ cxk−1 ≤ xk+1which implies that
xk+3 = |cxk+1 − a(xk+2 − xk+1)| > cxk+1 > xk+1 > xk+2.
Therefore, the situation in (4.58) is repeated with the new low and highvalues xk+2 and xk+3. If (4.59) does not hold, then its negative holds forpossibly more than one index value:
xk+j = a(xk+j−1 − xk+j−2) − cxk+j−2 = axk+j−1 − bxk+j−2, j = 2, 3, 4 . . .(4.60)
Eq. (4.60) is linear with complex eigenvalues since b > a2/4. If λ± arethese eigenvalues, then |λ±| =
√b > 1 if b > a+ 1. It follows that there is an
integer jmax(a, b) ≥ 2 such that
xk+jmax+1 ≤ xk+jmax
and once again a situation analogous to that in (4.59) is obtained. We haveshown that after at most a finite number of terms (determined only by thevalues of a, b) there will be a drop in the value of xn for all n, i.e., {xn} isnot eventually monotonic. It follows that {xn} oscillatory. Further, If {nm}where m = 0, 1, 2, . . . is the sequence of indicies at which drops in xn occur,then x−1+nm
≥ x1+nm−1, so from the preceding arguments and (4.58) it may
be concluded thatx1+nm
≥ cx−1+nm≥ cx1+nm−1
.
Therefore, inductively
x1+nm≥ cx1+nm−1
> c2x1+nm−2> · · · > cmx1+n0
from which we may conclude that {xn} is unbounded.Finally, if b > a + 1 then any strictly increasing solution of (4.39) must
approach infinity, since the origin is the only possible fixed point of (4.39).

94 Form Symmetries and Reduction of Order
Such strictly increasing solutions do exist; for example, since r > 1 by Lemma4.3, a solution {xn} with x0/x−1 = r converges to infinity monotonically.
We note here that if a + 1 < b ≤ a2/4, then by Theorem 4.3 the solutionsof (4.39) are generally unbounded, approaching infinity eventually monotoni-cally.
The special role of period 3 in the well-known Li-Yorke Theorem gives thefollowing result on the complex nature of the mapping φ. The significantconsequence of the following corollary and its extensions is that regardlessof whether a solution {xn} of (4.39) converges or not, it may oscillate in acomplicated way.
THEOREM 4.7
Let b ≤ a2. Then the mapping φ is chaotic in the sense of Li and Yorke; i.e.,it has an uncountable set S called a scrambled set with the following properties:
(i) S contains no periodic points of φ and φ(S) ⊂ S;
(ii) For every x, y ∈ S and x 6= y,
lim supk→∞
∥∥φk(x) − φk(y)∥∥ > 0, lim inf
k→∞
∥∥φk(x) − φk(y)∥∥ = 0.
(iii) For every x ∈ S and periodic y,
lim supk→∞
∥∥φk(x) − φk(y)∥∥ > 0.
PROOF Let [0,∞] be the one-point compactification of the closed half-line [0,∞) and extend φ continuously to [0,∞] as follows:
φ∗(0) = ∞, φ∗(∞) = a, φ∗(r) = φ(r) if r ∈ (0,∞).
Then φ∗ defines a continuous dynamical system on the compact interval[0,∞]. Now, if b < a2 then by Lemma 4.4(b) φ has a 3-cycle, which is alsoclearly a 3-cycle for φ∗. Also if b = a2 then since
a =b
a
φ→ 0φ∗
→ ∞ φ∗
→ a
it follows that φ∗ again has a 3-cycle, namely, {a, 0,∞}. In either case, since[0,∞] is homeomorphic to [0,1], by the Li-Yorke theorem φ∗ has a scrambledset S∗ ⊂ [0,∞]. Define
S = S∗ −[{∞} ∪
∞⋃
n=0
φ−n (0)
].

Homogeneous Equations of Degree One 95
Since ∪∞n=0φ
−n (0) is countable for each n, it follows that S is an uncountablesubset of (0,∞)∩ S∗ which satisfies conditions (i)–(iii) above because
φ|S = φ∗|S.
Hence, S is a scrambled set for φ as required.
The unit square a, b ≤ 1 and stability of the origin
We now consider the parameter values (a, b) in the unit square of the pa-rameter plane where some additional features exist.
LEMMA 4.6
If a, b < 1 then the origin is a globally asymptotically stable fixed point of(4.39).
PROOF Define f(x, y) = |ax − by| and note that for x, y ∈ [0,∞)2 wehave
f(x, y) ≤ max{ax, by} ≤ max{a, b}max{x, y}.Hence f is a weak contraction on [0,∞)2. The proof is completed upon
recalling that for each solution {xn} of (4.39) xn ≥ 0 for all n ≥ 1.
LEMMA 4.7
Let 0 < a, b ≤ 1 and either a = 1 or b = 1. For each solution {xn} of (4.39)if xk > xk−1 > 0 for some k ≥ 0 then xn < xk for all n > k.
PROOF First, let b = 1 and 0 < a ≤ 1. If axk > xk−1 then
xk+1 = axk − xk−1 < axk ≤ xk. (4.61)
From this we infer that axk+1 < axk ≤ xk so
xk+2 = xk − axk+1 < xk. (4.62)
Now from (4.61) and (4.62) it follows that
xk+3 ≤ max{axk+2, xk+1} < xk.
The last step is easily extended by induction to all n > k. Next, assumethat axk ≤ xk−1. Then
xk+1 = xk−1 − axk < xk−1 < xk
and it follows that axk+1 < axk ≤ xk. This again implies (4.62) and we argueas before.

96 Form Symmetries and Reduction of Order
Now, assume that a = 1 and 0 < b ≤ 1. Since xk > xk−1 ≥ bxk−1 > 0 byhypothesis, it follows that
0 < xk+1 = xk − bxk−1 < xk.
If xk+1 ≥ bxk, then xk+2 = xk+1 − bxk < xk+1 so that
xk+3 ≤ max{xk+2, bxk+1} < xk.
Inductively, xn > xk for n > k. If xk+1 < bxk then
xk+2 = bxk − xk+1 < bxk ≤ xk
which implies xk+3 < xk and by induction the proof is completed.
THEOREM 4.8
For all (a, b) ∈ [0, 1]2 except at the three boundary points (1,1), (1,0) and(0,1), the origin is a globally asymptotically stable fixed point of Eq. (4.39).
PROOF In light of Lemma 4.6 it remains only to consider the boundarieswhere either a = 1 or b = 1. For such points (a, b), first assume that 0 <ab < 1 and let {xn} be a solution of (4.39). Either xn < xn−1 for all n inwhich case xn converges to zero monotonically, or there is k1 ≥ 0 such thatxk1
> xk1−1 > 0. In the latter case, Lemma 4.7 implies that xn < xk1for all
n > k1. If the sequence {xn} is not eventually decreasing, then there is anincreasing sequence ki of positive integers such that
xk1> xk2
> · · · > xki> · · ·
and for i = 1, 2, 3, . . .
xn < xkiif ki < n ≤ ki+1.
These facts imply that xn → 0 as n → ∞. Stability of the origin followsfrom Lemma 4.7 also since xn ≤ max{x0, x−1} for all n ≥ 1.
Let us now examine the three boundary points mentioned in the statementof Theorem 4.8. At (a, b) = (1, 0), Eq. (4.39) reduces to the trivial equationxn+1 = xn whose solutions are constants given by the values of x0. At (a, b) =(0, 1) each solution of xn+1 = xn−1 trivially has period 2: {x−1, x0}. Whatabout the parameter point (a, b) = (1, 1)?
Eq. (4.39) exhibits rather interesting properties when a = b = 1 that wenow discuss. We start with the following result concerning the bifurcations ofsolutions of (4.39) at the parameter point (a, b) = (1, 1).

Homogeneous Equations of Degree One 97
COROLLARY 4.2
Every neighborhood of (1,1) in the parameter plane contains a pair (a, b) forwhich one of the following is true:
(a) Every solution of (4.39) converges to zero;(b) There are unbounded solutions of (4.39) that are equal to zero infinitely
often;(c) There are positive solutions of (4.39) that have period three (hence are
bounded but not convergent).
PROOF (a) For each (a, b) in the open unit square every solution of (4.39)converges to zero by Theorem 4.8.
(b) On the parabola b = a2 which contains (1,1), Lemma 4.5 shows thatthe desired solutions exist for every value a > 1. In fact, Lemma 4.5 showsthat as (a, b) passes (1,1) on the curve b = a2, solutions of (4.39) changequalitatively from bounded and convergent to unbounded and nonconvergent,with an “uneasy compromise” taking place at (1,1).
(c) For each (a, b) on the cubic curve a3 + ab− b3 = 1 which contains (1,1),Theorem 4.4 establishes the existence of positive period-3 solutions for everyvalue a > 1.
From Corollary 4.2 it is clear that (1, 1) is an interesting point in the pa-rameter plane of (4.39). We now consider the equation
xn+1 = |xn − xn−1|, n = 0, 1, 2, . . . (4.63)
The factor equation is, of course,
rn+1 =
∣∣∣∣1
rn− 1
∣∣∣∣ , n = 0, 1, 2, . . . (4.64)
if we define rn = xn/xn−1 for every n ≥ 0. The corresponding mapping of thehalf-line is
φ(r) =
∣∣∣∣1
r− 1
∣∣∣∣ , r > 0.
Define the set of backward iterates of zero as
C = ∪∞i=0φ
−i(0) = {r > 0 : ri = φi(r) = 0 for some positive integer i} ∪ {0}.
In the above definition, we interpret φ0 as the identity mapping. The nextresult establishes a basic property of the set C with respect to the solutionsof (4.63).
LEMMA 4.8
If {xn} is a solution of (4.63) with x0/x−1 ∈ C, then {xn} eventually hasperiod 3.

98 Form Symmetries and Reduction of Order
PROOF By assumption r0 = x0/x−1 ∈ C; therefore, x−1 6= 0 and thereis k ≥ 0 such that rk = φk(r0) = 0 for some least integer k. Hence, xk = 0and it readily follows that
{xn} = {x−1, x0, . . . xk−1, 0, xk−1, xk−1, 0, xk−1, xk−1, 0, . . .}.
The left and right halves
φL(r) =1
r− 1, 0 < r ≤ 1, φR(r) = 1 − 1
r, r ≥ 1
are both one-to-one maps and their inverses are easily computed as
φ−1L (r) =
1
1 + r, r ≥ 0, φ−1
R (r) =1
1 − r, 0 ≤ r < 1.
The mapping φ has a unique fixed point
r =
√5 − 1
2
which is the same as the unique fixed point for φL; φR has no fixed points inthis case. Next, we define the set of backward iterates of r as
D = ∪∞i=0φ
−i(r) = {r > 0 : ri = φi(r) = r for some positive integer i}.
Note that r = φ0(r) ∈ D and that D ∩ C is empty. The next resultestablishes a basic property of the set D based on the fact that r < 1.
LEMMA 4.9
If {xn} is a solution of (4.63) with x0/x−1 ∈ D, then {xn} is eventuallydecreasing monotonically to zero.
PROOF If x0/x−1 ∈ D then xj/xj−1 = rj = r for some j ≥ 1. Thusxn/xn−1 = rn = r for all n ≥ j and since r < 1 it follows that xn <xn−1 for all n ≥ j. Therefore, {xn} is monotonically decreasing. If the limit
limn→∞ xn = L ≥ 0 then by continuity we must have L = 0.
Since φ is a rational form, we see that C ⊂ Q+ but D∩Q+ is empty, whereQ+ is the set of all nonnegative rational numbers. Therefore, by Lemmas4.8 and 4.9, period-3 solutions of (4.63) may exist when the initial valuesx0, x−1 are rational, whereas solutions that converge to zero may occur whenthe initial values have an irrational ratio. Theorem 4.9 below shows that thisdichotomy is descriptive of all solutions of (4.63). We need one more lemmabefore stating the theorem.

Homogeneous Equations of Degree One 99
LEMMA 4.10
Let {xn} be a solution of (4.63) such that xn > 0 for all n. If xk > xk−1 forsome k ≥ 0, then xn < xk for all n > k; i.e., {xn} displays a downward trend.
PROOF Under the given hypotheses we have that xk+1 = xk−xk−1 < xk.Therefore, xk+2 = xk − xk+1 < xk, and thus, xk+3 ≤ max{xk+1, xk+2} < xk.The last step by induction extends to n > k + 3 and completes the proof.
THEOREM 4.9
(a) If x0/x−1 /∈ Q+ then the corresponding solution {xn} of (4.63) convergesto zero.
(b) If x0/x−1 /∈ Q+ ∪D then the solution {xn} converges to zero but it isnot eventually monotonic.
(c) C = Q+; thus if x0/x−1 ∈ Q+ then the corresponding solution {xn} of(4.63) has period 3 eventually.
PROOF (a) Since r0 = x0/x−1 /∈ C, it follows that rn 6= 0, 1 for alln. This implies that xn 6= 0, xn−1 for all n. Therefore, xn > 0 and eitherxn < xn−1 for all n in which case xn converges to zero monotonically, or thereis k1 ≥ 0 such that xk1
> xk1−1 > 0. In the latter case, Lemma 4.10 impliesthat xn < xk1
for all n > k1. Thus, if the sequence {xn} is not eventuallydecreasing then there is an increasing sequence ki of positive integers suchthat
xk1> xk2
> · · · > xki> · · ·
and {xn} is decreasing for ki ≤ n < ki+1, i = 1, 2, 3, . . ., i.e.,
xki> xki+1 > · · · > xki+1−1.
These facts imply that xn → 0 as n→ ∞.(b) Convergence follows from Part (a). If {xn} is eventually monotonic,
then there is k ≥ 0 such that xn < xn−1 or equivalently, rn < 1 for all n ≥ k.We show that this leads to a contradiction. Since r0 /∈ D, it follows thatrn 6= r for all n. Note that for r ∈ (1/2, r),
φ2(r) = φ21(r) = φ1(φ1(r)) =
2r − 1
1 − r< r.
Thus, if rk ∈ (1/2, r) then there is j with φj(rk) = φj1(rk) ≤ 1/2; i.e.,
rk+j ≤ 1/2 and therefore, rk+j+1 ≥ φ1(1/2) = 1 which is a contradiction. Weconclude that {xn} is not eventually monotonic.
(c) Since φ is a rational form, C ⊂ Q+. Now we show that Q+ ⊂ C. To thisend, let r0 ∈ Q+ where r0 = x0/x−1. First, let us assume that both x0 andx−1 are integers. Then the corresponding solution of (4.63) also has integer

100 Form Symmetries and Reduction of Order
terms xn. For each n, either xn ≤ xn−1 or xn > xn−1. In the latter case,Lemma 4.10 implies that xn+i < xn for i ≥ 1 and in the former case, eitherxn < xn−1 or xn = xn−1. That is, either rn = 1 ∈ C or xn must decrease.Since there are only finitely many integers involved, it follows that rn = 1 orxn = 0 for some n; i.e., rn = 1 or 0 for a sufficiently large integer n whichmeans that r0 ∈ C.
Next, let x0 and x−1 be any pair of positive real numbers such that r0 =x0/x−1 is rational. Then r0 = q0/q−1 where q0, q−1 are positive integers so
by the preceding argument, r0 ∈ C and the proof is complete.
COROLLARY 4.3
Let {xn} be a solution of (4.63). Then:(a) {xn} has period 3 eventually if and only if x0/x−1 ∈ Q+ or x−1 = 0.(b) xn = xk(r)n−k for some k ≥ 0 with xk ≤ x0 if and only if x0/x−1 ∈ D.
(c) Let x−1 6= 0. Then xn → 0 as n → ∞ if and only if x0/x−1 /∈ Q+.(d) {xn} is unstable in all cases; i.e., (4.63) has no stable solutions.
The next corollary is the ratios version of Corollary 4.3.
COROLLARY 4.4
Let {rn} be a solution of (4.40). Then:(a) rk = 0 for some k ≥ 0 (so rn is undefined for n > k) if and only if
r0 ∈ Q+.
(b) For r0 /∈ Q+, {rn} is unstable.
Let us now take a closer look at the solutions of (4.64) when r0 is irrational.We begin by showing that equation (4.64) has periodic solutions of all possibleperiods except 3. With minor modifications, the next theorem applies toeventually periodic solutions as well.
THEOREM 4.10
(a) Equation (4.64) has a p-periodic solution {r1, . . . , rp} for every p 6= 3given by
r1 =1 +
√5
2, r2 =
√5 − 1√5 + 1
(p = 2)
r1 =1
2
[yp−4 +
√y2
p−4 + 4yp−4yp−1
], rk =
yk−4r1 − yk−2
yk−3 − yk−5r1, 2 ≤ k ≤ p, (p ≥ 4)
where yn is the n-th term of the Fibonacci sequence; i.e., yn+1 = yn + yn−1
for n ≥ 0 where we define
y−3 = −1, y−2 = 1 y−1 = 1 y0 = 1.

Homogeneous Equations of Degree One 101
(b) If {r1, . . . , rp} is a periodic solution of (4.64) then for the correspondingsolution {xn} of (4.63) it is true that
xn = x0ρn/p, if n/p is an integer
xn ≤ x0αρn/p, otherwise
where
ρ =
p∏
i=1
ri < 1, α = max{r1, . . . , rp}ρ−(1−1/p) > 1.
PROOF (a) Let r1 > 1. Then r2 = φ(r1) = φ2(r1) = 1 − 1/r1 < 1 and
r3 = φ(r2) = φL(r2) =1
r2− 1 =
1
r1 − 1.
Though it is possible that r3 = r1, to examine potential 3-cycles, let usassume that r3 < 1. Then
r4 =1
r3− 1 = r1 − 2.
Clearly r4 6= r1, so a period-3 solution cannot occur with two points lessthan 1. Since φ2 maps the interval (1,∞) into (0, 1), a period-3 solutioncannot have two or more points greater than 1. We can also rule out a period-3 solution having all three points less than 1, since φ1 is strictly decreasing onthe interval (0,1). Therefore, (4.64) cannot have a period-3 solution. Next,we seek cycles of the form
r1 > 1, 0 < rk < 1, k = 2, 3, . . . , p. (4.65)
To explicitly determine a 2-cycle, set
r1 > 1, r2 = φR(r1) =r1 − 1
r1, r3 = φL(r2) =
1
r1 − 1(4.66)
and solve the equation r3 = r1 to obtain
r1 =1 +
√5
2= γ, r2 =
√5 − 1√5 + 1
=1
γ2.
The number γ is of course the “golden ratio or mean.” For explicitly listingcycles of length p ≥ 4 that satisfy conditions (4.65) we need the famoussequence of Fibonacci numbers
y1 = 1, y2 = 2, y3 = 3, y4 = 5, y5 = 8, y6 = 13, . . .
that are generated by the linear initial value problem
yn+1 = yn + yn−1, y0 = 1, y−1 = 0. (4.67)

102 Form Symmetries and Reduction of Order
Following the pattern that was started above, namely,
r4 =r1 − 2
1 − 0, r5 =
r1 − 3
2 − r1, · · ·
we claim that
rk =yk−4r1 − yk−2
yk−3 − yk−5r1, k = 4, 5, . . . , p. (4.68)
with rk given by (4.66) for k = 1, 2, 3. If we assume that (4.68) holds for somek, then
rk+1 =1
rk− 1
=yk−3 − yk−5r1 − yk−4r1 + yk−2
yk−4r1 − yk−2
=yk−1 − yk−3r1yk−4r1 − yk−2
where we used (4.67) for the last equality. This establishes (4.68) by induction.Next, using (4.68) we can solve the equation rp+1 = r1 or
yp−3r1 − yp−1
yp−2 − yp−4r1= r1
to obtain the value
r1 =1
2
[yp−4 +
√y2
p−4 + 4yp−4yp−1
], p ≥ 4
which together with (4.66), (4.67), and (4.68) completely determines the p-cycle that satisfies conditions (4.65) for p 6= 3.
(b) Without loss of generality, let r1 = x1/x0. If {r1, . . . , rp} is a solutionwith period p, and
ρ = r1r2 · · ·rp
then for each positive integer k,
xkp = r1r2 · · · rpx(k−1)p = x(k−1)pρ = · · · = x0ρk.
More generally, writing n = kp+ l where 0 ≤ l ≤ p− 1, we get
xn = rnrn−1 · · ·rn−l+1xkp
≤ max{r1, . . . , rp}x0ρn/p−l/p
≤ x0 max{r1, . . . , rp}ρ−(p−1)/pρn/p
which establishes the assertion about xn. Clearly, if ρ < 1 then α > 1 sinceat least one of the p points of the cycle must exceed 1. Finally, ρ < 1 forotherwise the subsequence {x0ρ
k} of {xn} with n = pk would be unbounded

Homogeneous Equations of Degree One 103
if ρ > 1, or {xn} would be periodic with period p if ρ = 1. But neither of
these cases is possible.
We conclude the discussion of the absolute value equation with two remarks.
REMARK 4.3 (Period 3 solutions) As we have just seen, for (a, b) =(1, 1) the period 3 solutions of (4.39) pass through the origin and are notstrictly positive. Hence, they cannot correspond to 3-cycles of (4.64), a factthat is consistent with Theorem 4.8(c). On the other hand, note that as (a, b)approaches (1, 1) along the curve (4.50) the quantities r1, r2, r3 in (4.51) havethe following limits
lim(a,b)→(1,1)
r1 = 1, lim(a,b)→(1,1)
r2 = 0, lim(a,b)→(1,1)
r3 = ∞.
These correspond to, respectively, the line y = x, the x-axis and the y-axisin the phase plane of (4.39) which are indeed lines that are the loci of theperiod-3 solutions of Theorem 4.4(b) in the state-space (or the phase plane).As (a, b) approaches (1, 1), we may imagine the three lines in Figure 4.8 mov-ing towards the coordinate axes and the 45-degree line and coinciding withthem in the limit. Therefore, the nonpositive period-3 solutions of (4.39) maybe interpreted as limiting values of the positive period-3 solutions as (a, b)
approaches (1, 1) along the curve (4.42).
REMARK 4.4 (Stability) No period-2 or period-3 solution of (4.39)is stable, whether asymptotically or structurally. Theorem 4.4 shows thestructural instability; as for asymptotic instability, recall that since a p-cycle{r1, . . . , rp} of (4.40) does not contain the minimum point of φ, it is unstableif
1 <
p∏
i=1
|φ′(ri)| =
p∏
i=1
b
r2i=
bp∏pi=1 r
2i
that is, ifp∏
i=1
ri < bp/2.
If p = 2 and a > 0, then r1r2 < (a2+2b−a2)/2 = b by (4.52) so the positive 2-periodic solutions are not asymptotically stable . The same conclusion clearlyholds when a = 0 and b = 1. For p = 3 and a > 1 we have from (4.53) thatr1r2r3 < b3/2 if and only if
a(a2 + b) −√a2(a2 + b)2 − 4b3 < 2b3/2.
The preceding inequality reduces to 2b3/2 < a(a2 + b) which is true if r1is real. Hence, positive period-3 solutions of (4.39) are not asymptotically

104 Form Symmetries and Reduction of Order
stable. Also, Theorem 4.9 shows that the period-3 solutions passing throughthe origin are unstable, though ironically these are the only solutions thatappear in computer simulations because of their rationality!
4.5 Notes
The results in this chapter have been used in prior literature, e.g., in Dehghan,et al. (2008b), and Sedaghat (2009a, 2009b). The appeal of HD1 equations isin their easy identifiability and subsequent factorization. The factor equationsare not always easy to deal with, just because they have lower order. However,the reduction in order through SC factorization can simplify the study ofequations in some cases. The absolute value equation is a case in point.The results presented here are largely taken from Sedaghat (2004a) and Kentand Sedaghat (2004a). Related results, background material, and additionalcomments appear in the next chapter.
4.6 Problems
4.1 Show that Example 4.1 can be extended to all nontrivial groups.
4.2 Prove Proposition 4.1.
4.3 Let {an}, {bn} be sequences of real numbers with an 6= 0 for all n. Showthat the rational difference equation
xn+1 = xn−1
(anxn−k
xn+ bn
)
is HD1 on the group of all nonzero real numbers under ordinary multiplicationand determine its SC factorization.
4.4 Let {an} be a sequence in the group G = (0,∞) under ordinary multipli-cation and let {bn} be any sequence of nonnegative real numbers.
(a) Show that the following generalization of Eq. (4.16) in Example 4.7 isHD1 on G and find its SC factorization:
xn+1 =anxn−p+1xn−p−q
xn−q + bnxn−p−q.
(b) Show that the following variation of the equation in (a) is also HD1 onG and find its SC factorization:
xn+1 =anxn−p+1xn−q
bnxn−q + xn−p−q.

Homogeneous Equations of Degree One 105
(c) Show that the following HD1 difference equation
xn+1 =anxn−pxn−q
bnxn−q + xn−p−q
has a SC factorization given by Corollary 4.1, Part (b) but not (c).
4.5 Let an = 1 for all n ≥ 0 in Eq. (4.16) of Example 4.7.(a) If p = 1 and q is any nonnegative integer in (4.16) use the SC factor-
ization (4.17) to show that all solutions of (4.16) are eventually periodic withperiod 2(q + 1).
(b) Is the assertion in Part (a) true if an = a 6= 1 is some nonzero realconstant for all n ≥ 0? Explain the changes in the behaviors of solutions inthis case.
(c) Generalize the result in Part (a) to all odd positive integers p.(d) Use the SC factorization (4.17) to discuss the behaviors of solutions of
(4.16) for an even positive integer p.
4.6 Recall the backward difference operator ∆ on a commutative group G
∆xn = xn − xn−1.
For m ≥ 1 define ∆m+1xn = ∆m(∆xn).If gn : G → G for each n ≥ 1and 0 ≤ j ≤ k then show that the difference equation
xn+1 = xn−j + gn(∆kxn)
is HD1 on G and find its SC factorization.
4.7 Derive the solution of Eq. (4.19) from the triangular system in Example4.8.
4.8 Consider the following variation of Eq. (4.19):
xn+1 = xn +a(xn − xn−1)
2
xn − xn−2, a 6= 0. (4.69)
(a) Show that Eq. (4.69) is HD1 relative to the additive group of realnumbers and find its SC factorization.
(b) Prove that the second-order factor equation obtained in (a) is HD1relative to the relevant group of nonzero real numbers and find its SC factor-ization.
(c) Using the order-preserving substitution sn = r−1n to transform the first-
order factor equation in (b) into a linear equation, determine the completefactorization of (4.69) into a triangular system of three first-order equations.
4.9 (a) Verify that the difference equation
xn+1 = xn +a(xn − xn−1)
xn−1 − xn−2, a 6= 0

106 Form Symmetries and Reduction of Order
is HD1 relative to the additive group of real numbers and determine its SCfactorization.
(b) Use the factorization in (a) to show that the solutions of the differenceequation in (a) are given by the formula
xn = x0 + σδn +
n∑
i=6δn+1
ti
for a suitable real number σ and integers δn ≥ 0 such that n = 6δn + ρn forintegers 0 ≤ ρn ≤ 5. Example 2.9 in Chapter 2 is relevant to this problem.
4.10 Verify that the linear-like equations (4.24)-(4.26) are HD1 on (0,∞)under multiplication and find their SC factorizations.
4.11 Assume that k = 2 in Eq. (4.29).(a) Determine the complete SC factorization into a triangular system and
use it to determine the behaviors of solutions of (4.29) with initial valuesx0 > x−1 > x−2.
(b) If the three initial values and a, b are arbitrary real numbers with b 6= 0then use the SC factor equation to determine the behaviors of solutions of thethird-order Eq. (4.29).
4.12 Supply the details of calculation for the solution (4.34) in Example 4.12.
4.13 Explain the dynamics of the three simple maps in (4.43) on (0,∞) witha, b > 0.

5
Type-(k,1) Reductions
Recall from Section 3.3.3 that type-(k, 1) order reductions of the recursiveequation
xn+1 = fn(xn, xn−1, . . . , xn−k) (5.1)
are generally based on the form symmetry
H(u0, u1, . . . , uk) = [u0 ∗ h(u1), u1 ∗ h(u2), . . . , uk−1 ∗ h(uk)] (5.2)
where h : G → G is a given self-map of G. In Chapter 4 we considered aspecial case where h is the group inversion map h(u) = u−1. In this chapterwe discuss a much more general case in which it is assumed only that themapping h is invertible.
Before proceeding with details, we make some basic observations. Fromthe semiconjugate relation it follows that a type-(k, 1) reduction with a formsymmetry of type (5.2) exists if and only if there are functions φn such that
φn(u0 ∗h(u1), u1 ∗h(u2), . . . , uk−1∗h(uk)) = fn(u0, u1, . . . , uk)∗h(u0). (5.3)
If such φn exists then a change of variables to
tn = xn ∗ h(xn−1) (5.4)
yields a SC factorization of (5.1) with the factor and cofactor equations
tn+1 = φn(tn, . . . , tn−k+1), (5.5)
xn+1 = tn+1 ∗ h(xn)−1. (5.6)
It is evident from this SC factorization that type-(k, 1) reductions are char-acterized by a one-dimensional cofactor equation whereas the factor equationis k-dimensional. In this chapter we discover that a large variety of differenceequations, including all HD1 equations, fall into this category.
5.1 Invertible-map criterion
We found earlier that if h(u) = u−1 then identity (5.3) holds if and only if thefunctions fn are homogeneous of degree 1 for all n. A question that naturally
107

108 Form Symmetries and Reduction of Order
arises now is if h is a given function then for which types of functions fn doesthe identity (5.3) holds.
The next result answers this question when h is an invertible map. Thoughnot as succinct as the HD1 property, the necessary and sufficient conditionthat it gives applies to a much broader class of functions. To avoid notationalconflict, we write h−1 for the inverse of the function h and h(u)−1 for theinverse of the group element h(u).
THEOREM 5.1
(Invertible map criterion) Assume that h : G → G is a bijection. Foru0, v1, . . . , vk ∈ G let ζ0 = u0 and define
ζj = h−1(ζ−1j−1 ∗ vj), j = 1, . . . , k. (5.7)
Then Eq. (5.1) has the form symmetry (5.2) with SC factors φn satisfying(5.3) if and only if the quantity
fn(u0, ζ1, . . . , ζk) ∗ h(u0) (5.8)
is independent of u0 for every n. In this case the factor functions are definedas
φn(v1, . . . , vk) = fn(u0, ζ1, . . . , ζk) ∗ h(u0).
PROOF First assume that (5.8) is independent of u0 for all v1, . . . , vk sothat the function
φn(v1, . . . , vk) = fn(u0, ζ1, . . . , ζk) ∗ h(u0) (5.9)
is well defined. Next, if H is given by (5.2) then for all u0, u1, . . . , uk
φn(H(u0, u1, . . . , uk)) = φn(u0 ∗ h(u1), u1 ∗ h(u2), . . . , uk−1 ∗ h(uk)).
Definevj = uj−1 ∗ h(uj), j = 1, . . . , k. (5.10)
Then by (5.7)
ζ1 = h−1(u−10 ∗ v1) = h−1(u−1
0 ∗ u0 ∗ h(u1)) = u1.
We show that in fact ζj = uj for every j if (5.10) holds. Suppose by way ofinduction that ζl = ul for 1 ≤ l < j. Then
ζj = h−1(ζ−1j−1 ∗ vj) = h−1(u−1
j−1 ∗ uj−1 ∗ h(uj)) = uj
as claimed. Thus by (5.9)
φn(H(u0, u1, . . . , uk)) = fn(u0, . . . , uk) ∗ h(u0)

Type-(k,1) Reductions 109
Now if Fn and Φn are the unfoldings of fn and φn respectively, then
H(Fn(u0, . . . , uk)) = [fn(u0, . . . , uk) ∗ h(u0), u0 ∗ h(u1), . . . , uk−2 ∗ h(uk−1)]
= [φn(H(u0, u1, . . . , uk)), u0 ∗ h(u1), . . . , uk−2 ∗ h(uk−1)]
= Φn(H(u0, . . . , uk))
and it follows that H is a semiconjugate form symmetry for Eq. (5.1).Conversely, if H as given by (5.2) is a form symmetry then the semiconju-
gate relation implies that there are functions φn such that
fn(u0, . . . , uk) ∗ h(u0) = φn(u0 ∗ h(u1), . . . , uk−1 ∗ h(uk)). (5.11)
For every v1, . . . , vk in G and with ζj as defined in (5.7),
fn(u0, ζ1, . . . , ζk) ∗ h(u0) = φn(u0 ∗ h(ζ1), ζ1 ∗ h(ζ2), . . . , ζk−1 ∗ h(ζk))
= φn(v1, . . . , vk)
which is clearly independent of u0.
It is worth nothing that (5.7) is a backwards version of the cofactor equation(5.6) that is obtained by solving (5.4) for xn−1 instead of xn. To do this werequired h to be invertible. Of course, in (5.7) it is necessary to iterate onlyk times.
Theorem 5.1 is a significant extension of Theorem 4.1 to all cases withinvertible h. In the rest of this chapter we discuss a few special cases of (5.2)where h is invertible.
5.2 Identity form symmetry
The identity map or function h on G, i.e., h(u) = u defines the identity formsymmetry i.e., the following special case of (5.2):
H(u0, u1, . . . , uk) = [u0 ∗ u1, u1 ∗ u2, . . . , uk−1 ∗ uk]. (5.12)
This type of form symmetry is characterized by a change of variables to
tn = xn ∗ xn−1.
The factor and cofactor equations for the SC factorization of (5.1) with theidentity form symmetry are given by (5.5) and (5.6) as
tn+1 = φn(tn, . . . , tn−k+1), (5.13)
xn+1 = tn+1 ∗ x−1n . (5.14)

110 Form Symmetries and Reduction of Order
From the cofactor equation we obtain the following relations for odd andeven terms of a solution {xn} of (5.1) in terms of a solution {tn} of the factorequation:
x2n = t2n ∗ · · · ∗ t4 ∗ t2 ∗ x0 ∗ (t2n−1 ∗ · · · ∗ t3 ∗ t1)−1
x2n+1 = t2n+1 ∗ · · · ∗ t3 ∗ t1 ∗ (t2n ∗ · · · ∗ t4 ∗ t2 ∗ x0)−1.
Example 5.1
Each of the following equations has the identity form symmetry
xn+1 =an
xn(xnxn−1 + bn), xn+1 = ean+bn(xn+xn−1) − xn.
In the case of the exponential equation, adding xn to both sides and substi-tuting tn = xn + xn−1 we readily obtain the following SC factorization on R
under ordinary addition:
tn+1 = ean+bntn
xn+1 = tn+1 − xn.
For the rational equation, if an, bn are sequences of positive real numbers thenmultiplying the equation on both sides by xn and setting tn = xnxn−1 it iseasy to see that the rational equation has the following SC factorization over(0,∞) under ordinary multiplication:
tn+1 =an
tn + bn,
xn+1 =tn+1
xn.
The next result uses Theorem 5.1 to give a condition for verifying whethera difference equation has the identity form symmetry.
COROLLARY 5.1
For every u0, v1, . . . , vk ∈ G let ζ0 = u0 and define ζj = ζ−1j−1 ∗ vj for j =
1, . . . , k. Then Eq. (5.1) has the identity form symmetry (5.12) if and only ifthe quantity
fn(u0, ζ1, . . . , ζk) ∗ u0 (5.15)
is independent of u0 for every n. In this case the factor functions are definedas
φn(v1, . . . , vk) = fn(u0, ζ1, . . . , ζk) ∗ u0.
The following examples illustrate Corollary 5.1.

Type-(k,1) Reductions 111
Example 5.2
Consider the third-order difference equation on (0,∞) under ordinary multi-plication:
xn+1 =xnxn−1
anxn + bnxn−2, an ≥ 0, bn > 0. (5.16)
Here fn(u0, u1, u2) = u0u1/(anu0 + bnu2) and if
ζ1 =v1u0, ζ2 =
v2ζ1
=u0v2v1
are substituted in fn we obtain
fn
(u0,
v1u0,u0v2v1
)u0 =
u0(v1/u0)
anu0 + bn(u0v2/v1)u0 =
v21
anv1 + bnv2.
Since the last expression is independent of u0 and a function of the newvariables v1 and v2 only, by Corollary 5.1 Eq. (5.16) has the identity formsymmetry. Its factor equation is
tn+1 =t2n
antn + bntn−1(5.17)
with cofactor xn+1 = tn+1/xn. Now let us examine whether the second-orderequation (5.17) also has the identity form symmetry. Substituting ζ1 = v1/u0
in the functions
φn(u0, u1) =u2
0
anu0 + bnu1
gives
φn
(u0,
v1u0
)u0 =
(u0)2u0
anu0 + bn(v1/u0)=
u40
anu20 + bnv1
which is clearly not independent of u0. Thus Corollary 5.1 implies that (5.17)does not have the identity form symmetry. On the other hand, (5.17) is HD1so it has the inversion form symmetry. Theorem 4.1 yields the following SCfactorization for (5.17):
rn+1 =1
an + bn/rn(5.18)
tn+1 = rn+1tn.
The substitution sn = 1/rn (an order-preserving form symmetry) in (5.18)produces a linear equation sn+1 = an+bnsn. Thus we have a full factorizationof Eq. (5.16) into the following triangular system of first-order equations
sn+1 = an + bnsn
tn+1 =tnsn+1
xn+1 =tn+1
xn.

112 Form Symmetries and Reduction of Order
Example 5.3
We show that the difference equation
xn+1 =an
xnebnxn/xn−2 , an, bn ∈ R, an 6= 0 for all n (5.19)
has the identity form symmetry over the group of nonzero real numbers undermultiplication. Applying Corollary 5.1 to the function on the right-hand sideof (5.19) gives
fn
(u0,
v1u0,u0v2v1
)u0 = an exp
(bn
u0
u0v2/v1
)= an exp
(bnv1v2
).
Since the above expression is independent of u0 Eq. (5.19) has the identityform symmetry and its factor equation is
tn+1 = anebntn/tn−1 .
We note in passing that Eq. (5.19) is HDp with p = −1, showing that ho-mogeneous equations with degrees other than one may possess non-inversionform symmetries and SC factorizations.
The next example discusses a higher-order version of the identity form sym-metry that leads to an order reduction that is not of type-(k, 1).
Example 5.4
Consider the equation (4.16), i.e.,
xn+1 =anxn−p+1xn−p−q
xn−q
from Example 4.7 again. This equation can be rewritten as
xn+1xn−q = anxn−p+1xn−p−q
so the substitution
tn = xnxn−q−1 (5.20)
gives the pair of equations
tn+1 = antn−p, xn+1 =tn+1
xn−q.

Type-(k,1) Reductions 113
5.3 Inversion form symmetry
As previously defined in Section 4.2, group inversion on G, i.e., h(u) = u−1
defines the inversion form symmetry i.e., the following special case of (5.2):
H(u0, u1, . . . , uk) = [u0 ∗ u−11 , u1 ∗ u−1
2 , . . . , uk−1 ∗ u−1k ].
Note that h is an invertible map and in fact a self-inverse map, i.e., h = h−1.The inversion form symmetry is characterized by a change of variables to
tn = xn ∗ x−1n−1. (5.21)
The next result is an immediate consequence of Theorem 5.1.
COROLLARY 5.2
For every u0, v1, . . . , vk ∈ G let ζ0 = u0 and define ζj = v−1j ∗ ζj−1 for
j = 1, . . . , k. Then Eq. (5.1) has the inversion form symmetry if and only ifthe quantity
fn(u0, ζ1, . . . , ζk) ∗ u−10 (5.22)
is independent of u0 for every n. In this case the factor functions are definedas
φn(v1, . . . , vk) = fn(u0, ζ1, . . . , ζk) ∗ u−10 .
As stated in Chapter 4 there is a simple characterization of functions fn
which satisfy (5.22). Recall that Eq. (5.1) is homogeneous of degree one (HD1)if for every n = 0, 1, 2, . . . the functions fn are all homogeneous of degree onerelative to the group G, i.e.,
fn(u0 ∗ t, . . . , uk ∗ t) = fn(u0, . . . , uk) ∗ tfor all t, ui ∈ G, i = 0, . . . , k, and all n ≥ 0.
We now prove Theorem 4.1 in Section 4.2 as a consequence of Corollary 5.2and Theorem 3.1.
COROLLARY 5.3
Eq. (5.1) has the inversion form symmetry if and only if fn is HD1 relativeto G for all n. In this case, the factor equation for (5.1) is given by
tn+1 = fn(1, t−1n , (tn ∗ tn−1)
−1, . . . , (tn ∗ tn−1 ∗ · · · ∗ tn−k+1)−1) (5.23)
with the cofactor xn+1 = tn+1 ∗ xn.

114 Form Symmetries and Reduction of Order
PROOF First if ζj = v−1j ∗ζj−1 as in Corollary 5.2 then by straightforward
iterationζj = v−1
j ∗ · · · ∗ v−11 ∗ u0, j = 1, . . . , m. (5.24)
Now if fn is HD1 for every n then
fn(u0, ζ1, . . . , ζk) ∗ u−10 = fn(1, ζ1 ∗ u−1
0 , . . . , ζk ∗ u−10 )
which by (5.24) is independent of u0. Thus by Corollary 5.2 Eq. (5.1) has theinversion form symmetry.
Conversely, assume that (5.1) has the inversion form symmetry. Then byCorollary 5.2 for every u0, v1, . . . , vk ∈ G the quantity in (5.22) is independentof u0. There are functions φn where
fn(u0, ζ1, . . . , ζk) ∗ u−10 = φn(v1, . . . , vk) (5.25)
= φn(ζ0 ∗ ζ−11 , . . . , ζk−1 ∗ ζ−1
k ).
Note that (5.25) holds for arbitrary values of u0, ζ1, . . . , ζk since v1, . . . , vk
are arbitrary. Thus for all t, s0, . . . , sk ∈ G and all n,
fn(s0 ∗ t, . . . , sk ∗ t) = φn((s0 ∗ t) ∗ (s1 ∗ t)−1, . . . , (sk−1 ∗ t) ∗ (sk ∗ t)−1) ∗ (s0 ∗ t)= [φn(s0 ∗ s−1
1 , . . . , sk−1 ∗ s−1k ) ∗ s0] ∗ t
= fn(s0, . . . , sk) ∗ t.It follows that fn is HD1 relative to G for all n. The factor equation (5.23) isobtained using the change of variables (5.21) and the HD1 property as follows:If {xn} is a solution of (5.1) then
tn+1 = xn+1 ∗ x−1n
= fn(xn, xn−1, xn−2, . . . , xn−k) ∗ x−1n
= fn(1, xn−1 ∗ x−1n , xn−2 ∗ x−1
n , . . . , xn−k ∗ x−1n )
= fn(1, xn−1 ∗ x−1n , (xn−2 ∗ x−1
n−1)(xn−1 ∗ x−1n ), . . .
(xn−k ∗ x−1n−k+1) · · · (xn−2 ∗ x−1
n−1)(xn−1 ∗ x−1n ))
= fn(1, t−1n , (tn ∗ tn−1)
−1, . . . , (tn ∗ tn−1 ∗ · · · ∗ tn−k+1)−1).
Finally, the equivalence of the SC factorization here with Eq. (5.1) follows
from Theorem 3.1.
The next example presents an alternative way of finding the SC factorizationand reducing the order of Eq. (5.16) in Example 5.2.
Example 5.5
Consider again the third-order difference equation (5.16), i.e.,
xn+1 =xnxn−1
anxn + bnxn−2, an, bn > 0.

Type-(k,1) Reductions 115
Here for all n, fn(u0, u1, u2) = u0u1/(anu0 + bnu2) is HD1 on (0,∞) underordinary multiplication. By Corollary 5.3 Eq. (5.16) has the following factorequation
tn+1 =tn−1
antntn−1 + bn(5.26)
with a cofactor xn+1 = tn+1xn. Now, (5.26) which has order two is not HD1on (0,∞); however, substituting ζ1 = v1/u0 in the functions φn(u0, u1) =u1/(anu0u1 + bn) gives
φn
(u0,
v1u0
)u0 =
v1/u0
anu0v1/u0 + bnu0 =
v1anv1 + bn
which is independent of u0. Thus Corollary 5.1 implies that Eq. (5.26) hasthe identity form symmetry. Its SC factorization is found by substitutingrn = tntn−1 to get
rn+1 =rn
anrn + bn
tn+1 =rn+1
tn.
Note that the factor equation above is the same as (5.18).
REMARK 5.1 A change of variables such as sn = xn−1 ∗ x−1n is also
essentially the inversion form symmetry since the mapping sn → s−1n = xn ∗
x−1n−1 is a conjugacy.
5.4 *Discrete Riccati equation of order two
As we saw in Example 4.10 in Chapter 4 every linear difference equationon a nontrivial field F is HD1 relative to the group of units of F and thusadmits a type-(k, 1) reduction in order. The resulting factor equation, i.e., thediscrete Riccati equation (4.23), plays a more subtle role in the theory of lineardifference equations on arbitrary fields than we can discuss at this stage. Thisbasic role, which is not limited to the inversion form symmetry or the HD1property, is discussed later in this chapter and more completely in Chapter 7.This section is starred because its content is not essential to understanding thematerial on factorization and reduction of order that appear in later sectionsand chapters. However, the reader is urged to at least read through andunderstand the statements of results in this section so as to not feel entirelyunfamiliar with the very basic concept of the Riccati equation.

116 Form Symmetries and Reduction of Order
In this section we give a detailed analysis of the Riccati difference equa-tion of order two with constant coefficients in the field R of real numbers(the Riccati equation of order one is simpler and similarly treated in existingliterature; see the notes for this chapter). Our purpose is to gain a deeperunderstanding of Riccati equations of higher-order and their real solutionsbefore encountering them again later in relation to reductions of order. Thestudy in this section uses well-known results from the classical theory of dif-ference equations; specifically, we use the linear difference equation of orderthree
yn+1 = ayn + byn−1 + cyn−2. (5.27)
whose SC factor is the following discrete Riccati equation of order two
xn+1 = a+b
xn+
c
xnxn−1. (5.28)
To simplify the discussion and reduce the number of possible cases thatneed to be considered, we assume that
a, b ≥ 0, c > 0, x0, x−1 ∈ (−∞,∞). (5.29)
If we define the initial values for (5.27) as
y0 = x0y−1, y−1 = x−1y−2 and set (5.30)
y−2 = 1 (or any fixed nonzero real number)
then we obtain a one to one correspondence between the solutions of (5.28)and those solutions of (5.27) that do not contain zero; i.e., each solution of(5.28) uniquely defines a solution of (5.27) that does not pass through theorigin and vice versa. If {yn} is a solution of (5.27) with yk = 0 for someleast k then xk+1 = yk+1/yk is not defined. Under conditions (5.30) thecorrespondence between solutions of (5.27) that pass through the origin andthose of (5.28) that become undefined is also one to one.
In the next section we use the solutions of the linear equation (5.27) todetermine the singularity set S of (5.28), i.e., the set of all initial values in R2
that lead to a zero in the denominator of (5.28) after a finite number of itera-tions. After that, we prove that the unique positive fixed point of (5.28) underconditions (5.29) is globally asymptotically stable for initial points (x0, x−1)outside a set M of Lebesgue measure zero that contains S. Finally, we discusssolutions of (5.28) that under conditions (5.29) originate in M but do not con-verge to the positive fixed point. These solutions may be called exceptionalsince M has measure zero; they are not typically observed in numerical sim-ulations. Nevertheless, these solutions include periodic orbits of all possibleperiods as well as an uncountable number of oscillatory, nonperiodic ones.
The singularity set

Type-(k,1) Reductions 117
We now determine the singularity set of Eq. (5.28) under conditions (5.29)using the properties of solutions of the linear equation (5.27). The character-istic polynomial of (5.27) is
P (λ) = λ3 − aλ2 − bλ− c. (5.31)
Note that the real solutions of (5.31) also give the fixed points of the Riccatiequation (5.28). The cubic polynomial P has at least one real root. The nexttwo results give more precise information about all roots of P .
LEMMA 5.1
Assume that conditions (5.29) hold. Then the polynomial P has precisely onepositive real root ρ that satisfies
ρ ≥ max
{3√c,a+
√a2 + 4b
2
}(5.32)
with equality holding if and only if a = b = 0.
PROOF By the Descartes rule of signs P has only one positive root ρ.Further
P (λ) = λ(λ2 − aλ− b) − c
and the roots of λ2 − aλ − b are (a ±√a2 + 4b)/2. If λ0 is the nonnegative
one of these roots then since P (λ0) = −c < 0 it follows that ρ > λ0. Next,from P (ρ) = 0 we obtain
ρ2 − aρ− b =c
ρ
which implies that c/ρ ≤ ρ2, i.e., ρ ≥ 3√c. Finally, if equality holds in (5.32)
then ρ = 3√c 6= λ0 since P (λ0) = −c 6= 0. But then P ( 3
√c) = 0 implies that
a 3√c+ b = 0 which implies a = b = 0 because a, b ≥ 0. Conversely if a = b = 0
then λ3 − c = 0 so ρ = 3√c and equality holds in (5.32).
It is possible to find a formula for ρ in terms of radicals, but that informationis neither necessary nor particularly useful here.
LEMMA 5.2
Assume that conditions (5.29) hold and let ρ be the positive root of (5.31).
(a) Eq. (5.31) has two other roots that can be calculated in terms of ρ as
r± = −ρ− a
2±√(
ρ+ a
2
)2
− ρ2 + b. (5.33)

118 Form Symmetries and Reduction of Order
(b) If (ρ+ a)2 ≥ 4(ρ2 − b) then the real roots r± are negative and
−ρ < r− ≤ −ρ− a
2≤ r+ < 0.
(c) If (ρ+ a)2< 4(ρ2 − b) (e.g., if b = 0) then the complex roots r± satisfy
∣∣r±∣∣ =
√ρ2 − aρ− b =
√c
ρ. (5.34)
PROOF (a) Dividing P (λ) by λ−ρ gives the quadratic polynomialQ(λ) =λ2 + (ρ− a)λ + ρ2 − aρ− b. The two roots r± of Q are given by (5.33).
(b) In this case,
r− > −ρ iff ρ− ρ− a
2>
√(ρ+ a
2
)2
− ρ2 + b iff ρ2 > b.
The last inequality is true by (5.32). Similarly,
r+ < 0 iff
√(ρ+ a
2
)2
− ρ2 + b <ρ− a
2iff ρ2 − aρ− b > 0.
The last inequality is true again by (5.32).(c) In this case the moduli of r± are easily found to be given by (5.34). If
b = 0 then since by (5.32) ρ > a it follows that
(ρ+ a)2 < (2ρ)2 = 4ρ2
and roots r± are complex.
Based on Lemma 5.2 the next result summarizes the standard facts aboutthe solutions of the linear equation (5.27). Of particular interest to us is thefact that the coefficients of solutions all have the same general formula interms of initial values.
LEMMA 5.3
Suppose that conditions (5.29) hold.
(a) If (ρ+ a)2> 4(ρ2 − b) then
yn = C1ρn + C2(r
+)n +C3(r−)n
where the coefficients Cj, j = 1, 2, 3 are given by
Cj(x0, x−1) = α1jx0x−1 + α2jx−1 + α3j (5.35)
for suitable constants αij, i, j = 1, 2, 3 that do not depend on the initial values.

Type-(k,1) Reductions 119
(b) If (ρ+ a)2
= 4(ρ2 − b) then
yn = C1ρn + (C2 + C3n)rn where r = r+ = r− = −ρ− a
2
where the coefficients Cj are given by (5.35) with constants αij, i, j = 1, 2, 3appropriate to this case.
(c) If (ρ+ a)2< 4(ρ2 − b) then
yn = C1ρn + (ρ2 − aρ− b)n/2(C2 cosnθ +C3 sinnθ)
where θ ∈ (π/2, π) is a constant and the coefficients Cj are given by (5.35)with constants αij, i, j = 1, 2, 3 appropriate to this case.
PROOF The solutions {yn} in each case are obtained routinely from theclassical theory of linear difference equations so we only explain about (5.35)and the range of θ in (c).
(a) The coefficients Cj satisfy the linear system
C1 + C2 + C3 = x0x−1, C1/ρ+C2/(r+) + C3/(r
−) = x−1,
and C1/ρ2 + C2/(r
+)2 + C3/(r−)2 = 1.
This system which is linear in the Cj can be easily solved to obtain
C1 =ρ2[x0x−1 − (r+ + r−)x−1 + r+r−]
(ρ− r+)(ρ− r−)(5.36)
from which we can read off the values of the constants α1j. Further,
C2 =− (r+)
2[x0x−1 − (r+ + r−)x−1 + r+r−]
(ρ− r+)(r+ − r−)
gives the constants α2j and
C3 = x0x−1 −C1 −C2
= (1 − α11 − α12)x0x−1 − (α21 + α22)x−1 − (α31 + α32)
which gives the numbers α3j.(b) In this case the coefficients Cj satisfy
C1 + C2 = x0x−1, C1/ρ− 2(C2 −C3)/(ρ− a) = x−1,
and C1/ρ2 + 4(C2 − 2C3)/(ρ− a)2 = 1.
In this case we obtain
C1 =4ρ2(ρ− a)
(3ρ− a)2x0x−1 +
4ρ2
(ρ− a)(3ρ− a)x−1 +
ρ2(ρ− a)2
(3ρ− a)2(5.37)

120 Form Symmetries and Reduction of Order
from which we can read off the values of the constants α1j. Further,
C2 = x0x−1 − C1 = (1 − α11)x0x−1 − α21x−1 − α31
gives the constants α2j for this case and
C3 =ρ− a
2x−1 −
ρ− a
2ρC1 +C2
from which α3j can be calculated.(c) In this case the coefficients Cj satisfy
C1 +C2 = x0x−1, C1/ρ+ (C2 cos θ −C3 sin θ)/√ρ2 − aρ− b = x−1, (5.38)
and C1/ρ2 + (C2 cos 2θ −C3 sin 2θ)/(ρ2 − aρ− b) = 1
where θ is defined by the equalities
cos θ = −√ρ
c
ρ− a
2, sin θ =
√ρ
c
√
ρ2 − b−(ρ+ a
2
)2
(5.39)
which also show that θ ∈ (π/2, π). From (5.38) we obtain using ρ2 − aρ− b =c/ρ,
C1 =ρ2c
ρ3 + c− 2√ρ3c cos θ
[ρ
cx0x−1 − 2
√ρ
c(cos θ)x−1 + 1
](5.40)
from which we can read off the values of the constants α1j. Further,
C2 = x0x−1 − C1
C3 =c sin 2θ
ρ3C1 +
cos 2θ
sin 2θC2 −
c
ρsin 2θ
from which αij, i = 2, 3 can be calculated.
From (5.35) it appears that the initial points (x0, x−1) that lead to singular-ities or the singular states of (5.28) must be located on a family of hyperbolasin the two-dimensional state-space (or the phase plane). Since each of thecoefficients Cj depends on the two intial values, each solution of the linearequation (5.27) is a function yn(u, v) of two variables, all other parametersbeing fixed. Thus the singularity set S of Eq. (5.28) can be written as
S =∞⋃
n=−1
{(u, v) : yn(u, v) = 0}.
We note that S ⊂ R2\(0,∞)2 because under conditions (5.29) each solution{xn} of (5.28) with (x0, x−1) ∈ (0,∞)2 satisfies xn > 0 for all n ≥ −1 and

Type-(k,1) Reductions 121
thus there are no undefined values. Now the next result is an immediateconsequence of the preceding lemma.
THEOREM 5.2
Suppose that conditions (5.29) hold. Then the singularity set of Eq. (5.28) isthe following sequence of hyperbolas
S =
∞⋃
n=−1
{(u, v) : β1nuv + β2nv + β3n = 0} ⊂ R2\(0,∞)2
where the sequences βin are defined as follows:(a) If (ρ+ a)
2> 4(ρ2 − b) then
βin = αi1 + αi2(r+/ρ)n + αi3(r
−/ρ)n
where αij are the constants in Lemma 5.3(a).
(b) If (ρ+ a)2
= 4(ρ2 − b) then
βin = αi1 + (−1/2)n (1 − a/ρ)n
(αi2 + αi3n)
where αij are the constants in Lemma 5.3(b).
(c) If (ρ+ a)2< 4(ρ2 − b) then
βin = αi1 +(c/ρ3
)n/2(αi2 cosnθ + αi3 sinnθ)
where αij are the constants in Lemma 5.3(c).
Global asymptotic stability
In this section we use the preceding results to show that under conditions(5.29) the positive fixed point ρ is stable and almost all solutions of Eq. (5.28)converge to ρ if at least one of the parameters a or b is positive.
LEMMA 5.4
Under conditions (5.29) ρ is the unique positive fixed point of (5.28) and ifa+ b > 0 then ρ is locally asymptotically stable.
PROOF Define
f(u, v) = a+b
u+
c
uv.
Since the fixed points of (5.28) correspond to the roots of the polynomial Pin (5.31), the uniqueness of ρ follows from Lemma 5.1. Next, the characteristicequation of the linearization of (5.28) at the fixed point (ρ, ρ) is
λ2 − fu(ρ, ρ)λ − fv(ρ, ρ) = 0 (5.41)

122 Form Symmetries and Reduction of Order
where
fu =−1
u2
(b+
c
v
), fv =
−cuv2
.
These and the fact that bρ+ c = ρ3 − aρ2 determine Eq. (5.41) as
λ2 +ρ− a
ρλ+
c
ρ3= 0.
The zeros of this quadratic equation are
λ± =ρ− a
2ρ
[−1 ±
√1 − 4c
ρ (ρ− a)2
].
Ifρ (ρ− a)
2 ≥ 4c (5.42)
then the numbers λ± are real and λ− ≤ λ+ < 0. Further, a little algebrashows that λ− > −1 if and only if
√1 − 4c
ρ (ρ− a)2 <
ρ+ a
ρ− a
which is obviously true since the left side is less than 1 and the right sidegreater than 1. Thus if (5.42) holds then ρ is a stable node for (5.28). Nextsuppose that (5.42) is false. Then λ± are complex with |λ±| =
√c/ρ3 < 1
where the inequality holds by Lemma 5.1 when a + b > 0. Thus if (5.42) isfalse then ρ is a stable focus for (5.28). These cases exhaust all possibilities
so ρ is locally asymptotically stable.
In considering the global behavior of solutions of Eq. (5.28) the followingset must be considered:
M = S∪{(u, v) : C1(u, v) = 0} = S∪{(u, v) : α11uv+α21v+α31 = 0} (5.43)
where S is the singularity set of (5.28) as determined in Theorem 5.2 and αi1
are the constants defined in Lemma 5.3.
THEOREM 5.3
Assume that conditions (5.29) hold with a + b > 0. Then the positive fixedpoint ρ is globally asymptotically stable relative to R2\M where the set M ⊂R2\(0,∞)2 defined by (5.43) has Lebesgue measure zero.
PROOF By Lemma 5.4 ρ is stable so it only remains to prove global attrac-tivity. If {xn} is a solution of Eq. (5.28) then we claim that limn→∞ xn = ρif (x0, x−1) 6∈M.

Type-(k,1) Reductions 123
First, consider the case where r± are real and distinct. In this case, Lemma5.3 implies that
xn =yn
yn−1=
C1ρn +C2(r
+)n + C3(r−)n
C1ρn−1 +C2(r+)n−1 + C3(r−)n−1. (5.44)
Since (x0, x−1) 6∈ M we have C1 = C1(x0, x−1) 6= 0. Now dividing byC1ρ
n−1 yields
xn =ρ+ (C2ρ/C1)(r
+/ρ)n + (C3ρ/C1)(r−/ρ)n
1 + (C2/C1)(r+/ρ)n−1 + (C3/C1)(r−/ρ)n−1
which implies, by Lemma 5.2(b), that limn→∞ xn = ρ. Next, in the case ofequal real roots a similar calculation gives
xn =ρ+ r(C2/C1 + C3n/C1)(r/ρ)
n−1
1 + [C2/C1 + C3(n− 1)/C1](r/ρ)n−1.
Since by Lemma 5.2(b) |r/ρ| < 1 it follows that limn→∞ xn = ρ. Next, inthe case of complex roots
xn =ρ+
√ρ2 − aρ− b(1 − a/ρ− b/ρ2)(n−1)/2(C2 cosnθ + C3 sinnθ)/C1
1 + (1 − a/ρ− b/ρ2)(n−1)/2[C2 cos(n− 1)θ +C3 sin(n − 1)θ]/C1
so again we obtain limn→∞ xn = ρ.Finally, since M is a countable collection of hyperbolas it has Lebesgue
measure zero in R2. To establish that M ⊂ R2\(0,∞)2 it remains to showthat the set
{(u, v) : C1(u, v) = 0} = {(u, v) : α11uv + α21v + α31 = 0} (5.45)
does not intersect the positive quadrant (0,∞)2. From expressions (5.36),(5.37) and (5.40) above we see that αi1 > 0 for i = 1, 2, 3 in each of the threepossible cases. Thus the set (5.45) cannot contain points (u, v) with u, v > 0.
REMARK 5.2 Theorem 5.3 also reveals an interesting property of so-lutions of the linear difference equation (5.27): All solutions {yn} of (5.27)except for those whose initial values are in the following set of measure zero
M1 =
{(y0, y−1, y−2) : y−2y−1 = 0 or
y0y−1
,y−1
y−2∈M
}
have the ratios of their consecutive terms yn/yn−1 converge to the real numberρ. Thus, for all large values of n we have yn ≈ ρyn−1. For initial values in M1
more varied types of asymptotic or long-term behavior can occur which wediscuss in the next section.

124 Form Symmetries and Reduction of Order
In the boundary case a = b = 0 in (5.29) Theorem 5.3 is false; as thenext proposition shows the solutions of (5.28) exhibit a completely differentbehavior in this case.
PROPOSITION 5.1
If neither of the initial values x0, x−1 is zero then the corresponding solutionof
xn+1 =c
xnxn−1, c 6= 0 (5.46)
is the period-3 sequence
{x−1, x0,
c
x0x−1, x−1, x0,
c
x0x−1, . . .
}.
In particular, every nonconstant solution (i.e., with x0 6= 3√c or x−1 6= 3
√c)
of (5.46) has period 3.
The next result applies Theorem 5.3 to an equation that is similar to (5.28).
COROLLARY 5.4
Assume that conditions (5.29) hold for the following equation
zn+1 =1
a+ bzn + cznzn−1. (5.47)
If a > 0 and z0, z−1 ≥ 0 or if a + b > 0 and z0 > 0, z−1 ≥ 0 thenlimn→∞ zn = 1/ρ.
PROOF Since the change of variables xn = 1/zn transforms (5.47) into(5.28), if z0, z−1 > 0 then Theorem 5.3 implies that
limn→∞
zn = limn→∞
1
xn=
1
ρ.
If a > 0 and either z0 = 0 or z−1 = 0 then from (5.47) we find that z1, z2 > 0
so again Theorem 5.3 applies. The last case is argued similarly.
A variety of exceptional solutions
The proof of Theorem 5.3 contains information about solutions that do notconverge to ρ. These are exceptional solutions of (5.28) since they can onlyoriginate in a set with Lebesgue measure zero, i.e., M\S. Yet, they can beeither convergent or oscillatory, periodic or nonperiodic. Thus they exhibit asignificant variety of qualitatively different types of behavior.

Type-(k,1) Reductions 125
THEOREM 5.4
Assume that conditions (5.29) hold with a+ b > 0.(a) The hyperbola H = {(u, v) : uv−(r+ +r−)v+r+r− = 0} is an invariant
subset of M .(b) If (ρ+ a)
2 ≥ 4(ρ2−b) and (x0, x−1) ∈ H\{(r+, r+)} then limn→∞ xn =r−.
(c) If (ρ+ a)2< 4(ρ2 − b) and:
(i) there are positive integers p, q that are relatively prime such that θ =πq/p satisfies (5.39) then for each (x0, x−1) ∈ H the corresponding solution{xn} of (5.28) is periodic with period p.
(ii) θ is an irrational multiple of π, then the corresponding solution of (5.28)is oscillatory but not periodic and the orbit {(xn, xn−1)} is dense in H.
PROOF (a) Notice from (5.36) that the expression for C1 is real even ifr± are complex and that C1(x0, x−1) = 0 if and only if
x0x−1 − (r+ + r−)x−1 + r+r− = 0. (5.48)
Indeed, from (5.40) we obtain C1 = 0 if and only if
x0x−1 − 2
√c
ρ(cos θ)x−1 +
c
ρ= 0
which is identical to (5.48) if r± are complex. Thus C1 = 0 in all cases if itis shown that C1(xn+1, xn) = 0 for all n ≥ 0 whenever x0 and x−1 satisfy(5.48).
Now, if (5.48) holds then
C1(x1, x0) = x0
(a+
b
x0+
c
x0x−1
)− (r+ + r−)x0 + r+r−
= ax0 + b+c
x−1+ (ρ− a)x0 + ρ2 − aρ− b
=c
x−1+ ρx0 + ρ2 − aρ. (5.49)
From (5.48) we obtain
x0 = −(ρ− a) − ρ2 − aρ− b
x−1= −(ρ− a) − c
ρx−1
which if inserted into (5.49) yields C1(x1, x0) = 0. The proof of (a) can nowbe completed by induction.
(b) In this case the roots r± are real. First suppose that (ρ+ a)2> 4(ρ2−b).
If (x0, x−1) ∈ H then C1 = 0 in (5.44) and thus
xn =C2(r
+)n + C3(r−)n
C2(r+)n−1 + C3(r−)n−1.

126 Form Symmetries and Reduction of Order
If C3 = 0 then xn = r+ for all n which can occur only if x1 = x0 = r+. IfC3 6= 0 then dividing by C3(r
−)n−1 and taking the limit gives
limn→∞
xn = limn→∞
(C2/C3)(r+/r−)n + r−
(C2/C3)(r+/r−)n−1 + 1= r−.
The argument for the case (ρ+ a)2
= 4(ρ2 − b) is similar but using Lemma5.3(b); we omit the straightforward details.
(c) In this case the roots r± are complex and if C1 = 0 then from Lemma5.3 we obtain
xn =(ρ2 − aρ− b)(C2 cos nθ +C3 sinnθ)
C2 cos(n − 1)θ + C3 sin(n− 1)θ
=c
ρcos θ +
c
ρsin θ
C3 cos(n− 1)θ−C2 sin(n− 1)θ
C2 cos(n− 1)θ+ C3 sin(n− 1)θ.
Define cos φ = C2/√C2
2 +C23 and sinφ = C3/
√C2
2 + C23 . Then
xn =c
ρcos θ +
c
ρsin θ
sinφ cos(n− 1)θ− cos φ sin(n− 1)θ
cos φ cos(n− 1)θ+ sinφ sin(n − 1)θ
=c
ρcos θ − c
ρsin θ
sin[(n− 1)θ− φ]
cos[(n− 1)θ − φ]
=c
ρcos θ − c
ρsin θ tan[(n− 1)θ − φ]. (5.50)
Now if θ = πq/p is a rational multiple of π then it follows from (5.50) thatxn is periodic with period p if q/p is in reduced form, i.e., if p, q are relativelyprime. If θ is not a rational multiple of π then the angles (n− 1)θ− φ forma dense subset of the circle as n→ ∞. Given that tanx is a homeomorphismfrom (−π/2, π/2) to R we conclude from (5.50) that the sequence {xn} is
dense in R. It follows that the orbit {(xn, xn−1)} is dense in H.
Figure 5.1 shows the characteristic polynomials PA and PB of (5.28) fortwo different sets of parameters:
(A) a = b = c = 1
and(B) a = c = 0.25, b = 2.
The roots of the characteristic polynomial PA are estimated to be
ρA = 1.8393, r+A = −0.42 + 0.606i, r−A = −0.42− 0.606i
and for the polynomial PB we obtain the estimates
ρB = 1.5988, r+B = −0.128, r−B = −1.221.
In Figure 5.2 we see the invariant hyperbolas HA and HB of exceptionalsolutions corresponding to the sets (A) and (B) of parameter values above.

Type-(k,1) Reductions 127
FIGURE 5.1
Two characteristic polynomials of the Riccati equation (5.28); see the textfor parameter values.
FIGURE 5.2
Two invariant hyperbolas of exceptional solutions of the Riccati equation(5.28); see the text for parameter values.

128 Form Symmetries and Reduction of Order
5.5 Linear form symmetry
The one-variable function h may be defined using structures that are morecomplex than groups. In this section we consider the function
h(u) = −αu, α 6= 0
on a nontrivial field F where α is a fixed element of the field. For convenience,we represent the field operations by the symbols for ordinary addition andmultiplication. The linear function h defines an order-reducing form symmetryof type (5.2)
H(u0, u1, . . . , uk) = [u0 − αu1, u1 − αu2, . . . , uk−1 − αuk]. (5.51)
We call H the linear form symmetry. Relative to the (additive) group of afield, the linear form symmetry generalizes both the identity form symmetry(α = −1) and the inversion form symmetry (α = 1). As we see in thissection and the next, large classes of difference equations possess the linearform symmetry (5.51). These classes include the linear equations as might beexpected as well as several types of nonlinear equations.
5.5.1 Determination criterion
The linear form symmetry is characterized by a change of variables to
tn = xn − αxn−1.
The factor and cofactor equations for the SC factorization of (5.1) with thelinear form symmetry are given by (5.5) and (5.6) as
tn+1 = φn(tn, . . . , tn−k+1), (5.52)
xn+1 = tn+1 + αxn. (5.53)
For each sequence {tn} in F the general solution of the cofactor equation(5.53) is readily calculated:
xn = αnx0 +
n∑
j=1
αn−jtj, n ≥ 1. (5.54)
By Theorem 3.1 this equation gives a solution of Eq. (5.1) if {tn} is asolution of (5.52) with the form symmetry (5.51).
The following corollary of Theorem 5.1 gives a necessary and sufficient con-dition for verifying whether Eq. (5.1) has the linear form symmetry.

Type-(k,1) Reductions 129
COROLLARY 5.5
For every u0, v1, . . . , vk in a field F define ζ0 = u0 and
ζj =u0
αj−
j∑
i=1
vi
αj−i+1, j = 1, . . . , k. (5.55)
Eq. (5.1) has the linear form symmetry (5.51) if and only if the quantity
fn(u0, ζ1, . . . , ζk) − αu0 (5.56)
is independent of u0. In this case, the factor functions are defined as
φn(v1, . . . , vk) = fn(u0, ζ1, . . . , ζk) − αu0.
Note that (5.55) defines ζj in Corollary 5.5 directly rather than recursively.It is obtained from the recursive definition (5.7) by a simple calculation; since
ζj = h−1(ζ−1j−1 ∗ vj) = − 1
α(−ζj−1 + vj) =
ζj−1 − vj
α,
equality (5.55) can be established by straightforward iteration.The next result gives necessary and sufficient conditions for the existence
of a linear form symmetry for certain rational difference equations of ordertwo in an arbitrary algebraic field.
COROLLARY 5.6
The rational recursive equation
xn+1 =ax2
n + bxnxn−1 + cx2n−1 + dxn + exn−1 + σn
Axn + Bxn−1 + C(5.57)
where the constant parameters a, b, c, d, e, A, B, C and the sequence {σn} arein a nontrivial field F , has the linear form symmetry u−αv with the constantα = −B/A if and only if A,B 6= 0 and the following equalities hold:
cA2 − aB2 −B3 = 0, (5.58)
2cA2 − bAB −B3 = 0, (5.59)
eA2 − dAB − B2C = 0. (5.60)
The corresponding factorization of (5.57) subject to (5.58)–(5.60) is
tn+1 =(CA2/B2)t2n + (eA/B)tn + σn
Atn + C, (5.61)
xn+1 = tn+1 −B
Axn.

130 Form Symmetries and Reduction of Order
PROOF Define the functions
fn(u, v) =au2 + buv + cv2 + du+ ev + σn
Au+Bv +C
and
ζ1 =u0 − v1α
.
By Corollary 5.5 u − αv is a form symmetry of (5.57) if and only if thefollowing quantity is independent of u0:
fn(u0, ζ1) − αu0 =
[(A+
B
α
)u0 −
B
αv1 + C
]−1 [(d− αC +
e
α
)u0+
+
(a −B +
b
α+
c
α2
)u2
0 +
(B − b
α− 2c
α2
)u0v1 +
+c
α2v21 − e
αv1 + σn
]. (5.62)
Setting the coefficients of terms containing u0 equal to zero gives
A+B
α= 0, (5.63)
d− αC +e
α= 0 (5.64)
a− B − αA+b
α+
c
α2= 0, (5.65)
B − b
α− 2c
α2= 0. (5.66)
From (5.63) we obtain the value
α = −BA. (5.67)
Adding (5.65) and (5.66) gives
0 = a− αA− c
α2= a+ B − cA2
B2
from which (5.58) follows. Next, using the value of α in (5.67) in (5.66)and (5.64) gives the equalities (5.59) and (5.60), respectively. Finally, as inCorollary 5.5, the remaining terms in (5.62) that do not contain u0 give the
factor equation (5.61).
Conditions (5.58)–(5.60) are not as restrictive as they may seem when itcomes to the existence of interesting solutions for (5.57). For F = R the fieldof real numbers, we discover in Section 5.6.5 that Eq. (5.57) has a rich varietyof solutions, including chaotic ones, even when (5.58)–(5.60) all hold.

Type-(k,1) Reductions 131
In the next example we establish the existence of a linear form symmetryin a third-order nonlinear difference equation.
Example 5.6
Let F be a nontrivial algebraic field, a0, a1, a2, b, c ∈ F , and let gn : F2 → Fbe a given sequence of functions. Consider the third-order equation
xn+1 = a0xn + a1xn−1 + a2xn−2 + gn(xn − bxn−1, xn − cxn−2). (5.68)
We use Corollary 5.5 to determine conditions on the parameters that implythe existence of the linear form symmetry for some nonzero real constant α.Define the functions
fn(u0, u1, u2) = a0u0 + a1u1 + a2u2 + gn(u0 − bu1, u0 − cu2)
which lead to the following expression in (5.56) via (5.55)
fn(u0, ζ1, ζ2) − αu0 = (a0 − α+a1
α+a2
α2)u0 −
a1
αv1 −
a2
α2v1 −
a2
αv2
+gn
(u0 −
b
αu0 +
b
αv1, u0 −
c
α2u0 +
c
α2v1 +
c
αv2
).
The preceding expression is independent of u0 for all choices of v1, v2 if andonly if
α3 − a0α2 − a1α− a2 = 0, (5.69)
b = α, c = α2.
Using the value α = b ∈ F in the polynomial (5.69) we conclude that (5.68)has the linear form symmetry u− bv if and only if
b 6= 0, c = b2, b3 − a0b2 − a1b− a2 = 0. (5.70)
If the above conditions are satisfied then by Corollary 5.5 the factor equationof (5.68) is the following second-order equation
tn+1 = − 1
α2(a1α+ a2)tn − a2
αtn−1 + gn
(b
αtn,
c
α2tn +
c
αtn−1
)
= − 1
b2(a1b+ a2)tn − a2
btn−1 + gn(tn, tn + btn−1).
Since by (5.70), a1b+ a2 = b3 − a0b2 the above equation further reduces to
tn+1 = (a0 − b)tn − a2
btn−1 + gn(tn, tn + btn−1).

132 Form Symmetries and Reduction of Order
5.5.2 Periodic solutions
In this section we assume that F is the field of complex numbers C and derivesome general results about periodic solutions of equations having a linear formsymmetry. These results are not generally true for the more special types offield symmetries such as the inversion or the identity. The next basic resultconcerns the cofactor equation (5.53).
LEMMA 5.5
Let p be a positive integer and let α ∈ C, α 6= 0.(a) If for a given sequence {tn} Eq. (5.53) has a solution {xn} of period p
then {tn} is periodic with period p.(b) Let {tn} be a periodic sequence in C with period p and assume that α
is not a p-th root of unity; i.e., αp 6= 1. If {τ0, . . . , τp−1} is one cycle of {tn}and
ξi =1
1 − αp
p−1∑
j=0
αp−j−1τ(i+j)mod p i = 0, 1, . . . , p− 1 (5.71)
then the solution {xn} of Eq. (5.53) with x0 = ξ0 and t1 = τ0 has period pand {ξ0, . . . , ξp−1} is a cycle of {xn}. If p is a minimal (or prime) period of{tn} then {xn} has minimal period p.
PROOF (a) Suppose that for a given sequence {tn} of complex numbersthe corresponding solution of (5.53) is periodic with period p. Let t1 = x1−αx0
and from (5.53) obtain inductively for i = 1, . . . , p
tp+i = xp+i − αxp+i−1 = xi − αxi−1 = ti.
Therefore, {tn} is periodic with period p.(b) With x0 = ξ0 and t1 = τ0 we get x1 = αx0 + t1 = αξ0 +τ0 . Using (5.71)
for ξ0 gives
x1 =α
1 − αp
p−1∑
j=0
αp−j−1τj
+ τ0 =1
1 − αp
p−2∑
j=0
αp−j−1τj+1 + τ0
= ξ1.
Proceeding in an inductive fashion, we see in this way that xi = ξi fori = 0, . . . , p− 1. Next, we show that xp = x0. Using (5.54) we have
xp = αpξ0 +
p−1∑
j=0
αp−j−1τj =αp
1 − αp
p−1∑
j=0
αp−j−1τj +
p−1∑
j=0
αp−j−1τj = ξ0 = x0.
Now, again by induction, for i = 1, . . . , p
xp+i = tp+i + αxp+i−1 = ti + αxi−1 = xi.

Type-(k,1) Reductions 133
Hence {xn} is a solution of (5.53) with period p, as claimed. If p is theminimal period of {tn} and q is the minimal period of {xn} then by what wejust established, q ≤ p. However, by Part (a) {tn} has period q ≥ p since p is
the minimal period for {tn}. Therefore, q = p.
Recall that the particular values α = ±1 correspond to the inversion andidentity form symmetries for the additive group of the field C. The next ex-ample shows that for these special types of linear form symmetry the cofactorequations may not preserve the periodic structures of the factor equations.Note that 1 is a p-th root of unity for every positive integer p and −1 is a p-throot of unity for all even positive integers p.
Example 5.7
Consider the following second-order difference equation on R:
xn+1 =a
xn − bxn−1+ bxn, a, b 6= 0.
Rearranging terms and substituting tn = xn−bxn−1 yields the factor equa-tion
tn+1 =a
tn.
Every solution of the above equation with initial value t0 6= a has periodp = 2: {
t0,a
t0, t0,
a
t0, . . .
}.
If b = 1 (corresponding to the inversion form symmetry) then the solutionof the cofactor equation xn+1 = tn+1 + xn is
xn = x0 +
n∑
j=1
tj
which is nonperiodic for all t0 6= 0.If b = −1 (corresponding to the identity form symmetry) then the solution
of the cofactor equation xn+1 = tn+1 − xn is
xn = (−1)nx0 +
n∑
j=1
(−1)n−jtj .
Although periodic solutions are possible for some initial values t0 = x0+x−1
clearly not all solutions {xn} are periodic.
The next result is an immediate consequence of Lemma 5.5 and Corollary5.5.

134 Form Symmetries and Reduction of Order
COROLLARY 5.7
Assume that the quantity defined in (5.56) is independent of u0 for all func-tions fn. Then:
(a) Eq. (5.1) has the linear form symmetry with SC factorization given by(5.52) and (5.53).
(b) Let p be a positive integer and let α ∈ C such that α 6= 0 and α is nota p-th root of unity; i.e., αp 6= 1. If the factor equation (5.52) has a solution{tn} of minimal (or prime) period p then Eq. (5.1) has a solution {xn} withminimal period p whose cycles are given by equations (5.71).
Example 5.8
Let α be a real number, α 6= 0 and consider the second order differenceequation
xn+1 = αxn +
∣∣∣∣1
xn − αxn−1− 1
∣∣∣∣ (5.72)
with real initial values x0, x−1. After subtracting the term αxn from bothsides, the substitution tn = xn − αxn−1 defines a linear form symmetry on R
with a factor equation
tn+1 =
∣∣∣∣1
tn− 1
∣∣∣∣ . (5.73)
In Theorem 4.10 of Section 4.4 it is established that Eq. (5.73) has a solutionof period p for every p 6= 3 with each cycle {r1, . . . , rp} given by
r1 =1 +
√5
2, r2 =
√5− 1√5 + 1
(p = 2)
r1 =1
2
[yp−4 +
√y2
p−4 + 4yp−4yp−1
],
rk =yk−4r1 − yk−2
yk−3 − yk−5r1, 2 ≤ k ≤ p, (p ≥ 4).
Here yn is the n-th Fibonacci number; i.e., yn+1 = yn +yn−1 for n ≥ 0 wherewe define
y−3 = −1, y−2 = 1 y−1 = 1 y0 = 1.
If α 6= ±1 then by Corollary 5.7, Eq. (5.72) also has periodic solutions ofperiod p in R for all positive integers p 6= 3. A cycle {ξ0, . . . , ξp−1} of {xn}for each p is given by formula (5.71). Since Eq. (5.73) does not have a solutionof period three, Lemma 5.5(a) and Theorem 3.1 imply that the second-orderequation (5.72) has no solutions of period three either. These statementswould be more difficult to establish without using the reduction of order tothe first order equation (5.73).
This example also illustrates an important difference between the solutionsof Eq. (5.72) and those of the second-order absolute value equation studied inSection 4.4. Whereas the qualitative properties of solutions of the first-order

Type-(k,1) Reductions 135
equation (5.73) are shared by the solutions of Eq. (5.72) for α 6= ±1, in thecase of the absolute value equation the properties of the solutions of (5.73) arenot shared by the solutions of the second-order equation. Instead, they areseen only in sequences of ratios of consecutive terms of each solution of theabsolute value equation. Thus the field linear form symmetry of R preservesthe aforementioned qualitative properties, but the inversion form symmetryof the absolute value equation does not.
REMARK 5.3 The relationship between a solution of period p of thefactor equation and the period-p solution of original difference equation thatis noted in Corollary 5.7 is not direct. Lemma 5.5, which specifies this rela-tionship quantitatively, does so through the cofactor equation not the originalequation (5.1). However, if |α| < 1 then we find in the next section thatan attracting periodic solution of the factor equation yields the same type ofsolution for the cofactor (hence also the original) equation, even if the restric-tions on initial values stated in Lemma 5.5(b) are not met. This feature is
particularly useful to have in numerical simulations on computers.
5.5.3 *Limit cycles
As further applications of linear form symmetries, in this section we use theassociated reduction in order to discuss convergence to periodic solutions ofequations that have such a form symmetry. These attracting periodic solutionsare the ones that are preserved by the linear form symmetry, as noted inRemark 5.3. The material in this section is not essential to understandingsemiconjugate factorization and reduction of order so readers who are notinterested in convergence issues may omit it without loss of continuity.
As in the previous section, we assume that F is the field C of complexnumbers or some subfield of C (such as R). Also, for convenience, we limitour work to the second-order version of (5.1)
xn+1 = fn(xn, xn−1). (5.74)
By Corollary 5.5 this equation has the linear form symmetry H(u0, u1) =u0 − αu1 for some α 6= 0 if and only if
fn
(u0,
u0 − v1α
)− αu0
is independent of u0 for all v1 and all n. In this case, if we define
gn(v1).= fn
(u0,
u0 − v1α
)− αu0
then the factor equation of (5.74) is the first-order equation
tn+1 = gn(tn). (5.75)

136 Form Symmetries and Reduction of Order
THEOREM 5.5
(Limit cycles) Assume that α ∈ C with 0 < |α| < 1 and that functions fn, gn
are defined as in the preceding discussion for n ≥ 0. If {tn} is a limit cycleor an attracting periodic solution of (5.75) in C then {xn} is a limit cycle of(5.74).
PROOF Let {τ0, . . . , τp−1} be an attracting cycle for (5.75) in C with
limn→∞
tpn+i = τi−1, i = 1, 2, . . . , p.
Let sn =∑n
j=1 αn−jtj . Then by rearranging terms in the summation we
find that
spn = αpn−1t1 + αpn−2t2 · · ·+ αpn−ptp
+ αpn−p−1tp+1 + αpn−p−2tp+2 · · ·+ αpn−2pt2p
+ · · ·+ αp−1tp(n−1)+1 + αp−2tp(n−1)+2 · · ·+ αpn−pntp(n−1)+p.
Factoring and rearranging various terms gives
spn = αp−1(αpn−pt1 + αpn−2ptp+1 + · · ·+ tpn−p+1)
+ αp−2(αpn−pt2 + αpn−2ptp+2 + · · ·+ tpn−p+2)
+ · · ·+ αpn−ptp + αpn−2pt2p + · · ·+ tpn
=
p∑
i=1
αp−in−1∑
k=0
(αp)n−k−1tpk+i.
Now for i = 1, 2, . . . , p define
σin =
n−1∑
k=0
(αp)n−k−1tpk+i and γin =
n−1∑
k=0
(αp)n−k−1τi−1 = τi−1
n−1∑
k=0
αpk.
Notice that∣∣∣∣σ
in − τi−1
1 − αp
∣∣∣∣ ≤∣∣σi
n − γin
∣∣+∣∣∣∣γ
in − τi−1
1 − αp
∣∣∣∣
≤n−1∑
k=0
|αp|n−k−1|tpk+i − τi−1|+∣∣∣∣γ
in − τi−1
1 − αp
∣∣∣∣
Clearly the second term on the right-hand side approaches 0 as n → ∞. Asfor the first term, let m ≥ 1 and define
δ = max1≤i≤p
{supk≥1
|tpk+i − τi−1|}<∞, δi
m = supk≥m
|tpk+i − τi−1|

Type-(k,1) Reductions 137
and observe that for m < n
n−1∑
k=0
|αp|n−k−1|tpk+i − τi−1| =
m−1∑
k=0
|αp|n−k−1|tpk+i − τi−1|
+n∑
k=m
|αp|n−k−1|tpk+i − τi−1|
≤ |αp|n−mδ
m−1∑
k=0
|αp|k + δim
n∑
k=m
|αp|n−k−1.
By taking n and m sufficiently large, each of the last two terms above canbe made arbitrarily small. Therefore,
limn→∞
σin =
τi−1
1 − αpi = 1, . . . , p.
It follows that
limn→∞
xpn = limn→∞
spn =
p∑
i=1
αp−iτi−1
1 − αp=αp−1τ0 + · · ·+ ατp−2 + τp−1
1 − αp.
Therefore, xpn → ξ0 as n → ∞ with ξ0 as in Lemma 5.5. From this and(5.53) we obtain
limn→∞
xpn+1 = limn→∞
(tpn+1 + αxpn) = τ0 + αξ0 = ξ1.
Inductively, we find that xpn+i → ξi for i = 0, 1, . . . , p − 1. This implies
that {xn} is an attracting periodic solution of (5.74).
Example 5.9
Consider the following second-order equation on R,
xn+1 = αxn + cn(xn − αxn−1)q (5.76)
0 < |α|, |q|< 1, c2m = c0 > 0, c2m+1 = c1 > 0, m = 0, 1, . . . (5.77)
In Eq. (5.76) it is possible to define a new variable tn = xn − αxn−1 whichidentifies a linear form symmetry H(u0, u1) = u0 −αu1 with φn(t) = cnt
q fort > 0.
Now consider the solutions of the first-order factor equation
tn+1 = cntqn. (5.78)
This equation is nonautonomous but for each j ≥ 1 two separate au-tonomous difference equations determine the even and odd terms of its so-lutions; specifically,
t2j = c2j−1tq2j−1 = c2j−1c
q2j−2t
q2
2j−2 = c1cq0t
q2
2j−2,
t2j+1 = c2jtq2j = c2jc
q2j−1t
q2
2j−1 = c0cq1t
q2
2j−1.

138 Form Symmetries and Reduction of Order
FIGURE 5.3
Convergence to a 2-cycle discussed in Example 5.9.
Using these simple first-order equations, it can be shown by straightforwardinduction that under conditions (5.77) all positive solutions of the factor equa-tion (5.78) converge to a 2-cycle
t2n → cq/(1−q2)0 c
1/(1−q2)1 = τ0,
t2n+1 → c1/(1−q2)0 c
q/(1−q2)1 = τ1.
Now Theorem 5.5 implies that every solution of (5.76) in the invariantregion or set {(x, y) : x > αy} converges to the attracting cycle
ξ0 =ατ0 + τ11 − α2
, ξ1 =ατ1 + τ01 − α2
.
Figures 5.3 and 5.4 illustrate the preceding results with the following pa-rameter values:
α =1
2, q = −2
3, c0 = 4, c1 = 2.
Example 5.9 can be extended to sequences cn with any period p with slightlymore calculating effort; see the Problems for this chapter.
We close this section with the next result concerning the uniform bound-edness of solutions of Eq. (5.74) when linear form symmetry is present.
PROPOSITION 5.2
(Boundedness) Let |α| < 1. If {tn} is a bounded sequence with |tn| ≤ B forsome B > 0, then the corresponding solution {xn} of the cofactor (5.53) isalso bounded and there is a positive integer N such that
|xn| < |α|+ B
1 − |α| for all n ≥ N. (5.79)

Type-(k,1) Reductions 139
FIGURE 5.4
Constituent curves for the 2-cycle in Figure 5.3.
PROOF From (5.54) we obtain
|xn| ≤ |α|n|x0|+n∑
j=1
|α|n−jB < |α|n|x0|+ B
∞∑
k=0
|α|k = |α|n|x0| +B
1 − |α| .
Now if n is large enough, then |α|n|x0| ≤ |α| from which (5.79) follows.
5.6 Difference equations with linear arguments
The existence of a linear form symmetry leads to an interesting array of ap-plications of the SC factorization method. In this section we examine theoccurrence of linear form symmetry in difference equations of the followingtype:
xn+1 =
k∑
j=0
ajxn−j + gn
k∑
j=0
bjxn−j
(5.80)
where the constants aj, bj, j = 0, 1, 2, . . . , k are given in a nontrivial field Fand gn : F → F are given functions for all n = 0, 1, 2, . . .
We refer to Eq. (5.80) as a difference equation with linear argument oforder k + 1 on the field F . These equations include linear nonhomogeneous

140 Form Symmetries and Reduction of Order
difference equation with constant coefficients
xn+1 =
k∑
j=0
ajxn−j + γn
as special cases with gn(u) = γn constants in F .
In this section we find necessary and sufficient conditions for Eq. (5.80) tohave the linear form symmetry and therefore, a SC factorization. In the spe-cial case of linear equations these conditions are satisfied; see Corollary 5.11below. Later in Chapter 6 we show that such linear equations also possessSC factorizations through a different form symmetry that leads to type-(1, k)reductions. Finally, in Chapter 7, after defining time-dependent form symme-tries, we derive SC factorizations of linear equations in the general case, i.e.,with variable coefficients in arbitrary algebraic fields.
5.6.1 The reduction theorem
We now establish the necessary and sufficient conditions for the existenceof a linear form symmetry for Eq. (5.80) and calculate the correspondingSC factorization. We state the following consequence of Corollary 5.5 as atheorem since it lays the foundation for the SC factorizations of equationswith linear arguments. It may be noted that the conclusion of the theoremis valid for arbitrary functions gn : F → F since the stated criteria for theexistence of linear form symmetry do not depend on the choice of gn.
THEOREM 5.6
Let F be a nontrivial field.
(a) Eq. (5.80) has the linear form symmetry (5.51) if and only if the fol-lowing polynomials have a common, nonzero root α ∈ F
P (u) = uk+1 − a0uk − a1u
k−1 − · · ·ak−1u− ak
Q(u) = b0uk + b1u
k−1 + · · ·+ bk−1u+ bk.
(b) If α is a common nonzero root of P and Q in F then (5.80) has a type-(k, 1) order reduction with the factor equation
tn+1 = −k−1∑
i=0
pitn−i + gn
(k−1∑
i=0
qitn−i
)(5.81)
where the numbers pi and qi are defined for i = 0, . . . , k− 1 as
pi = αi+1 − a0αi − · · · − ai, qi = b0α
i + b1αi−1 + · · ·+ bi. (5.82)

Type-(k,1) Reductions 141
PROOF (a) For each n ≥ 0 define the function
fn(u0, . . . , uk) =
k∑
j=0
ajuj + gn
k∑
j=0
bjuj
.
By Corollary 5.5 Eq. (5.80) has the linear form symmetry if and only if thequantity (5.56) is independent of u0. For any nonzero α ∈ F we find
fn(u0, ζ1, . . . , ζk) − αu0 = (a0 − α)u0 +
k∑
j=1
aj
(u0
αj−
j∑
i=1
vi
αj−i+1
)+
+gn
b0u0 +
k∑
j=1
bj
[u0
αj−
j∑
i=1
vi
αj−i+1
]
=
a0 − α+
k∑
j=1
aj
αj
u0 −k∑
j=1
aj
j∑
i=1
vi
αj−i+1+
+gn
b0 +
k∑
j=1
bjαj
u0 −k∑
j=1
bj
j∑
i=1
vi
αj−i+1
.
From the last expression above it is evident that the linear form symmetryexists if and only if α can be chosen such that
a0 − α+k∑
j=1
aj
αj= 0 and b0 +
k∑
j=1
bjαj
= 0.
Multiplying the two equalities above by αk and rearranging terms showsthat α must be a common nonzero root of the polynomials P and Q.
(b) Let α be a common nonzero root of P and Q in F . By Corollary 5.5and the calculations in Part (a), the factor functions are
φn(v1, . . . , vk) = −k∑
j=1
aj
j∑
i=1
vi
αj−i+1+ gn
−k∑
j=1
bj
j∑
i=1
vi
αj−i+1
= −k∑
i=1
k∑
j=i
aj
αj−i+1vi + gn
−k∑
i=1
k∑
j=i
bjαj−i+1
vi
.
For each i = 1, · · · , k, since α is a root of the polynomial P it follows that
k∑
j=i
aj
αj−i+1=
1
αk−i+1
(aiα
k−i + ai+1αk−i−1 + · · ·+ ak−1α+ ak
)
=1
αk−i+1(αk+1 − a0α
k − · · · − ai−1αk−i+1)
= αi − a0αi−1 − · · · − ai−1

142 Form Symmetries and Reduction of Order
Similarly, since α is also a root of the polynomial Q it follows that
k∑
j=i
bjαj−i+1
=1
αk−i+1
(biα
k−i + bi+1αk−i−1 + · · ·+ bk−1α+ bk
)
=1
αk−i+1
(−b0αk − b1α
k−1 − · · · − bi−1αk−i+1
)
= −b0αi−1 − b1αi−2 − · · · − bi−1.
Now, if the quantities pi and qi are defined as in (5.82) then the precedingcalculations show that
k∑
j=i
aj
αj−i+1= pi−1 and
k∑
j=i
bjαj−i+1
= −qi−1.
Using these quantities we write the factor functions as
φn(v1, . . . , vk) = −k∑
i=1
pi−1vi + gn
(k∑
i=1
qi−1vi
).
Identifying vi with tn−i+1 as usual gives the factor equation (5.81)
tn+1 = φn(tn, . . . , tn−k+1)
= −k∑
i=1
pi−1tn−i+1 + gn
(k∑
i=1
qi−1tn−i+1
)
= −k−1∑
i=0
pitn−i + gn
(k−1∑
i=0
qitn−i
).
For difference equations with linear arguments of order two (k = 1) we havethe following corollary.
COROLLARY 5.8
Let F be a nontrivial field, a0, a1, b0, b1 ∈ F and let {gn} be a sequence offunctions gn : F → F . If
b21 + a0b0b1 − a1b20 = 0 with b0b1 6= 0 (5.83)
then the equation
xn+1 = a0xn + a1xn−1 + gn(b0xn + b1xn−1) (5.84)

Type-(k,1) Reductions 143
has the SC factorization
tn+1 =
(a0 +
b1b0
)tn + gn (b0tn)
xn+1 = −b1b0xn + tn+1.
PROOF The polynomial Q in Theorem 5.6 is b0u + b1 whose only rootis λ = −b1/b0. Note that λ ∈ F and λ 6= 0 under conditions (5.83). Since λis also a root of the polynomial P , Theorem 5.6 applies to Eq. (5.84) under
conditions (5.83).
5.6.2 Economics: Modeling the business cycle
A special case of the equation in the next example with j = k = 1 hasbeen used to model the Keynesian business cycle in macroeconomics; see theremarks following the next example.
Example 5.10
Let a0, a1, . . . , ak ∈ C and suppose that gn : C → C is a given sequence offunctions. Consider the difference equation
xn+1 = a0xn + · · ·+ akxn−k + gn(xn − xn−j), 1 ≤ j ≤ k. (5.85)
By Theorem 5.6, Eq. (5.85) has the linear form symmetry if and only ifthere is α ∈ C, α 6= 0 such that
αk+1 − a0αk − · · ·ak−1α− ak = 0, (5.86)
αk − αk−j = 0. (5.87)
By Eq. (5.87) α must be a j-th root of unity, i.e., αj = 1. If j = 1 thenα = 1 and from (5.86) it follows that Eq. (5.85) has the linear form symmetryif and only if
a0 + a1 · · ·+ ak = 1, ( j = 1).
In this case Theorem 5.6 gives the factor equation of (5.85) as
tn+1 = gn(tn) −k−1∑
i=0
(1 − a0 · · · − ai)tn−i. (5.88)
If {tn} is a solution of (5.88) then the cofactor xn+1 = xn + tn+1 yields thecorresponding solution {xn} of (5.85) as
xn = x0 +
n∑
i=1
ti. (5.89)

144 Form Symmetries and Reduction of Order
The following special case of Eq. (5.85)
xn+1 = cxn + sxn−1 + gn(xn − xn−1), c+ s = 1, 0 < c ≤ 1 (5.90)
has been used to model the business cycle in macroeconomics. In (5.90) thenumber c is the “marginal propensity to consume” (or MPC) and the numbers = 1 − c is the “marginal propensity to save” (or MPS). In this context,the variable xn represents the “output” usually total income or gross domes-tic product in period n; a percentage c of the current period income xn isconsumed and affects the income in the next period. Also consumed is theamount sxn−1 saved in the preceding period. Thus Eq. (5.90) represents acase where all savings are fully consumed. The functions gn in (5.90) usuallydenote “investment functions” but often include other factors such as govern-ment spending. They are independent of n in some models but need not beso in general.
Models of this type that are based on Keynesian concepts such as MPC,MPS, etc. were explored throughout the 20th century to explain the occur-rence of “boom-bust” cycles in the absence of (and sometimes in spite of)external factors such as government policy or other types of interference. Seethe Notes section for references.
By Example 5.10 the first-order factor equation of (5.90) is
tn+1 = gn(tn) − stn
from which either an explicit formula for the solutions of (5.90) or significantdetails about the solutions may be obtained via (5.89).
5.6.3 Repeated reductions of order
An important by-product of Theorem 5.6 is that the factor equation of (5.80),namely, (5.81) is of the same type as (5.80), but it has a lower order. Thissuggests that Theorem 5.6 can be applied repeatedly to each time reducethe order of the original equation with linear arguments by one, as long ascommon, nonzero polynomial roots, or eigenvalues, exist. For convenience wenow give a name to such eigenvalues.
DEFINITION 5.1 The two polynomials in Corollary 5.6 are the jointcharacteristic polynomials of Eq. (5.80) if they have a common, nonzeroroot. Each common, nonzero root of the polynomials P and Q is a jointeigenvalue of Eq. (5.80).
The next result simplifies the task of searching for joint eigenvalues bylimiting it to all common roots of the original pair of polynomials P and Q.

Type-(k,1) Reductions 145
LEMMA 5.6
Let F be a nontrivial field and let α ∈ F be a joint eigenvalue of Eq. (5.80).If α1 ∈ F is another joint eigenvalue of (5.80) then α1 is a common nonzeroroot of both of the polynomials
P1(u) = uk + p0uk−1 + p1u
k−2 + · · ·+ pk−1
Q1(u) = q0uk−1 + q1u
k−2 + · · ·+ qk−1
where the coefficients pi and qi are defined in terms of α as in (5.82) fori = 0, . . . , k − 1.
PROOF By assumption,
P (α1) = Q(α1) = 0. (5.91)
Now
(u− α)P1(u) = (u− α)
uk +
k−1∑
j=0
p juk−j−1
= uk+1 +
k−1∑
j=0
[p j − αp j−1]uk−j − αpk−1.
where we define p−1 = 1 to simplify the notation. From (5.82) for eachj = 0, 1, . . . , k− 1 we obtain
pj − αpj−1 = −aj
and further, since P (α) = 0,
αpk−1 = α(αk − a0α
k−1 − · · · − ak−1
)
= P (α) + ak
= ak.
Thus
(u− α)P1(u) = P (u)
and if α1 6= α then P1(α1) = 0 by (5.91). If α1 = α then α is a double root ofboth P and Q so that their derivatives are zeros, i.e.,
P ′(α) = Q′(α) = 0. (5.92)

146 Form Symmetries and Reduction of Order
Now, using (5.82) we obtain
P1(α) = αk +
k−1∑
j=0
(αj+1 − a0αj − · · · − aj−1α− aj)α
k−j−1
= (k + 1)αk −k−1∑
j=0
(k − j)ajαk−j−1
= P ′(α).
In particular, if α1 = α then P1(α1) = 0 by (5.92). Similar calculations(left to the reader) show that Q1(α1) = 0, thus completing the proof.
An interesting by-product of the above proof is the following result whichwe state as a proposition.
PROPOSITION 5.3
At each joint eigenvalue α of (5.80) the second-stage polynomials P1 and Q1
are related to the joint characteristic polynomials P and Q at α via the equa-tions
P1(α) = P ′(α) and Q1(α) = Q′(α).
Theorem 5.6 and Lemma 5.6 imply the following result.
COROLLARY 5.9
(a) Assume that Eq. (5.80) has two joint eigenvalues α, α1 in a nontrivialfield F . Then the factor equation (5.81) has the linear form symmetry withthe factor equation
rn+1 = −k−2∑
i=0
p1,irn−i + gn
(k−2∑
i=0
q1,irn−i
)(5.93)
where
p1,i = αi+11 + p0α
i1 + · · ·+ pi and q1,i = q0α
i1 + q1α
i−11 + · · ·+ qi.
(b) The repeated SC factorization of (5.80) with joint eigenvalues α, α1
consists of the factor equation (5.93) and the two cofactor equations
tn+1 = α1tn + rn+1
xn+1 = αxn + tn+1.
(c) If Eq. (5.80) has m joint eigenvalues in F (counting repeated roots)where 1 ≤m ≤ k then it has a factor chain of length m and can be reduced inorder repeatedly m times.

Type-(k,1) Reductions 147
PROOF (a) The proof applies the same arguments as in the proof ofTheorem 5.6 to the factor equation (5.81) that was obtained using the jointeigenvalue α. We simply change ai to −pi and bi to qi in the proof and makeother minor modifications to complete the proof of this part.
(b) This follows from the general form of cofactors associated with the linearform symmetry.
(c) This follows by induction, using Part (a).
The preceding corollary leads to a natural question: Are there special casesof Eq. (5.80) with factor chains of length k? Or in different terminology,are there special cases of Eq. (5.80) with full triangular factorizations? Thefollowing result answers this question affirmatively.
COROLLARY 5.10
Let F be a nontrivial field and consider the following difference equation withlinear arguments
xn+1 = a0xn + · · ·+ ak−1xn−k+1 + gn (bxn − a0bxn−1 − · · · − ak−1bxn−k)(5.94)
where b, aj ∈ F , j = 0, . . . , k−1. If ak−1 6= 0 and (5.94) has k joint eigenvaluesin F then (5.94) admits repeated SC factorizations into a triangular systemof first-order equations over F .
PROOF By Definition 5.1 a nonzero α ∈ F is a joint eigenvalue of (5.94)if P (α) = Q(α) = 0 i.e., if
αk+1 − a0αk − a1α
k−1 − · · · − ak−1α = 0 (5.95)
bαk − a0bαk−1 − · · · − ak−2bα− ak−1b = 0. (5.96)
First, suppose that b 6= 0. Since α, ak−1 6= 0, after dividing (5.95) above byα and (5.96) by b both equations reduce to the following single equation
αk − a0αk−1 − a1α
k−2 − · · ·ak−1 = 0. (5.97)
Clearly, every common, nonzero root of P and Q is a root of the polynomialequation (5.97) and conversely, every root of (5.97) is nonzero and a rootof both P and Q. Therefore, Eq. (5.94) has k joint eigenvalues in F andby Corollary 5.9 it has a factor chain of length k, or equivalently, it has acomplete triangular SC factorization.
If b = 0 then (5.96) is true trivially for all α. Therefore, again the singleequation (5.97) remains whose k nonzero roots are all joint eigenvalues. So byCorollary 5.9 Eq. (5.94) has a factor chain of length k and a full triangular
SC factorization.

148 Form Symmetries and Reduction of Order
5.6.4 SC factorization of linear equations, factor chains
When b = 0 in (5.94) then the values gn(0) = γn represent constants in thefield F so that (5.94) reduces to a linear nonhomogeneous equation. Therefore,the following result is a straightforward consequence of Corollary 5.10.
COROLLARY 5.11
Let F be a nontrivial field and consider the linear nonhomogeneous differenceequation of order k
xn+1 = a0xn + a1xn−1 + · · ·+ ak−1xn−k+1 + γn (5.98)
with aj, γn ∈ F for j = 0, . . . , k − 1, n ≥ 0 and ak−1 6= 0. If F containsall eigenvalues of (5.98) then (5.98) has repeated SC factorizations into atriangular system over F via a factor chain as follows: If λj ∈ F are theeigenvalues for j = 0, . . .k − 1 then
y0,n+1 = λ0y0,n + y1,n+1, y0,n = xn
y1,n+1 = λ1y1,n + y2,n+1,
...
yk−1,n+1 = λk−1yk−1,n + γn.
PROOF The existence of the full SC factorization is established in Corol-lary 5.10. Note that the condition ak−1 6= 0 assures that all eigenvalues of(5.98) are nonzero. To obtain the triangular system, we use Theorem 5.6 toobtain the first SC factorization of (5.98) as
xn+1 = λ0xn + tn+1
tn+1 = −k−1∑
i=0
pitn−i + γn. (5.99)
For convenience, we re-label xn = y0,n and tn = y1,n. Since the factorequation (5.99) is again linear and by Lemma 5.6 λ1 is one of its eigenvalues,we obtain the further factorization
y0,n+1 = λ0y0,n + y1,n+1, y0,n = xn
y1,n+1 = λ1y1,n + y2,n+1,
y2,n+1 = −k−2∑
i=0
p1,i y2,n−i + γn
where the numbers p1,i are defined in Corollary 5.9. Continuing the above
argument we obtain the triangular system by induction.

Type-(k,1) Reductions 149
REMARK 5.4 The triangular system in Corollary 5.11 is derived froma factor chain through a series of type-(k, 1) factorizations. The system isshown in ascending form, with the bottom equation being independent of therest. For full triangular factorizations of linear equations over the complexnumbers C via cofactor chains are obtained in Section 6.2.2. Clearly, thetriangular system that results by either method is the same up to a rear-rangement of eigenvalues. For additional important remarks about the use ofthe SC factorization see Section 6.2.2.
The results on difference equations with linear arguments apply to moregeneral equations than (5.98). We now proceed to extend Corollary 5.11 to aclass of nonhomogeneous linear equations with variable coefficients that prop-erly includes all equations with constant coefficients as special cases. Thesignificance of the particular type of variable coefficients encountered in thenext corollary is explained in Section 7.4.3. The SC factorizations of generalnonhomogeneous linear equations with variable coefficients require the intro-duction of time-dependent form symmetries and will be discussed in Section7.4.
COROLLARY 5.12
Let F be a nontrivial field and let {σn}, {γn} be sequences in F . Considerthe nonhomogeneous linear difference equation
xn+1 =
k∑
j=0
(aj + bjσn)xn−j + γn (5.100)
with constants aj, bj ∈ F for j = 0, . . . , k and ak 6= 0.(a) If the polynomials P and Q in Theorem 5.6 have a joint eigenvalue
λ0 ∈ F then Eq. (5.100) has a type-(k, 1) reduction with SC factorization
tn+1 = −k−1∑
i=0
(pi + qiσn)tn−i + γn (5.101)
xn+1 = λ0xn + tn+1 (5.102)
where the constants pi, qi are as defined by (5.82) in Theorem 5.6.(b) Since Eq. (5.101) is of the same type as (5.100) the reduction to factor
can be repeated as long as joint eigenvalues exist in F . In particular, if F is analgebraically closed field then the nonhomogeneous linear difference equationwith variable coefficients
xn+1 = (a0 + bσn)xn + · · ·+ (ak−1 − ak−2bσn)xn−k+1 + ak−1bσnxn−k + γn
(5.103)has a full SC factorization into a triangular system of k+ 1 first-order lineardifference equations.

150 Form Symmetries and Reduction of Order
PROOF If we define the functions gn : F → F as gn(u) = σnu+ γn thenthe proof of Theorem 5.6 can be repeated to obtain the SC factorization in (a)into (5.101) and (5.102). The first statement in (b) is obvious. Further, therepeated SC factorization of Eq. (5.103) into a triangular system is obtained
directly using Corollary 5.10.
For second-order linear nonhomogeneous equations we have the followingconsequence of Corollary 5.12.
COROLLARY 5.13
Let F be a nontrivial field, a0, a1, b0, b1 ∈ F and let {σn}, {γn} be givensequences in F . If
b21 + a0b0b1 − a1b20 = 0 with b0b1 6= 0 (5.104)
then the linear nonhomogeneous difference equation
xn+1 = (a0 + b0σn)xn + (a1 + b1σn)xn−1 + γn (5.105)
has the SC factorization
tn+1 =
(a0 +
b1b0
+ b0σn
)tn + γn, t0 = x0 − a0x−1
xn+1 = −b1b0xn + tn+1.
Example 5.11
Consider the nonautonomous linear equation
xn+1 =
(α+
β
n+ 1
)xn − αβ
n+ 1xn−1, n = 0, 1, 2, . . . (5.106)
where α, β ∈ R and αβ 6= 0. Eq. (5.106) is a special case of (5.105) with
a0 = α, b0 = β, a1 = 0, b1 = −αβ, σn =1
n+ 1.
Therefore, Conditions (5.104) are satisfied and the following SC factorizationis obtained
tn+1 =β
n+ 1tn, xn+1 = αxn + tn+1. (5.107)
The solution of the factor equation in (5.107) is readily found as
tn+1 =βn+1t0(n+ 1)!
where n ≥ 0, t0 = x0 − αx−1.

Type-(k,1) Reductions 151
Inserting this into the cofactor equation in (5.107) and solving the resultingequation gives the explicit solution of (5.106) as
xn = αn
x0 + t0
n∑
j=1
(β/α)j
j!
.
Since for all nonzero, real α, β
limn→∞
n∑
j=1
(β/α)j
j!= eβ/α − 1
the following conclusions are easily arrived at:
(i) If α > 1 then limn→∞ xn = ∞ or limn→∞ xn = −∞ depending on theinitial values x0, x−1 while if α = 1 then
limn→∞
xn = x0 + t0(eβ − 1);
(ii) If |α| < 1 then limn→∞ xn = 0;
(iii) If α < −1 then each solution {xn} of (5.106) is unbounded and oscil-latory while if α = −1 then {xn} converges to the 2-cycle
(−1)n[x0 + t0(e
−β − 1)].
5.6.5 *A rational equation with chaotic solutions
In this section we show that the solutions of a rational recursive equationexhibit chaotic behavior in the field of real numbers. This fact is difficultto prove without reduction of order and it is significant for showing thatdifference equations with linear arguments are capable of generating complexbehavior. Rational equations of the type studied in this section are alsospecial types of quadratic difference equations that we study systematicallyin Chapter 8. The material in this section is not essential to understandingreduction of order by semiconjugate factorization and may be omitted withoutloss of continuity.
Consider the following second-order difference equation with linear argu-ments
xn+1 = cxn + g(xn − cxn−1) (5.108)
where g is the one-dimensional rational map
g(t) = pt+ q +s
t.

152 Form Symmetries and Reduction of Order
It is evident that Eq. (5.108) has the linear form symmetry −cu with theSC factorization
tn+1 = g(tn) (5.109)
xn+1 = tn+1 + cxn. (5.110)
Rearranging terms in (5.108) using the above g we obtain the second-order,rational recursive equation
xn+1 =(p + c)x2
n − c(2p+ c)xnxn−1 + pc2x2n−1 + qxn − qcxn−1 + s
xn − cxn−1.
(5.111)We point out that Eq. (5.111) is a special case of Eq. (5.57) that satisfies
all of the conditions (5.58)–(5.60) in Corollary 5.6 as may be readily verified.
REMARK 5.5 If tn > 0 for all n ≥ n0 where n0 is a positive integer,then xn+1 > cxn for all n ≥ n0. This is evident from (5.110):
xn0+1 = cxn0+ tn0+1 > cxn0
.
This conclusion extends by induction to all points (xn, xn+1) in the plane withn ≥ n0. Therefore, if g(t) > 0 for all t > 0 and we start with t0 = x0−cx−1 > 0then the entire orbit (xn, xn+1) of (5.108) stays in the region {(u, v) : v > cu}.To avoid singularities, we may assume that the initial values for (5.111) satisfy
x0 > cx−1. (5.112)
Note that if c ≤ 0 then in particular every pair of positive initial valuessatisfies (5.112). In the next lemma we obtain, among other information,conditions that imply g(t) > 0 for all t > 0. Note that if t is a fixed pointof (5.109) then by direct calculation, the second-order equation (5.108) has acorresponding fixed point
x =t
1 − c. (5.113)
LEMMA 5.7
Assume that s > 0, p ≥ 0 and consider
g(t) = pt+ q +s
t, t > 0. (5.114)
(a) If p > 0 then the function g attains its global minimum value 2√sp+ q on
(0,∞) at t =√s/p. Hence for p ≥ 0, g(0,∞) ⊂ (0,∞) if and only if
q > −2√sp.

Type-(k,1) Reductions 153
(b) The positive fixed points of g, when they exist, are solutions of the equationφ(t) = 0 where
φ(t) = (p − 1)t2 + qt + s.
There are three possible cases:(i) If p = 1 and q < 0 then g has a unique fixed point
t =s
|q| > 0.
(ii) If p < 1 then g has a unique positive fixed point
t =q +
√q2 + 4s(1 − p)
2(1 − p).
(iii) If p > 1 then g has up to two positive fixed points
t1 =|q| −
√q2 − 4s(p − 1)
2(p− 1)≤ t2 =
|q| +√q2 − 4s(p − 1)
2(p− 1).
(c) Let q > −2√sp and g2(t) = g(g(t)). Then
g2(t) = t iff φ(t)ψ(t) = 0
whereψ(t) = [p(p+ 1)t2 + q(p+ 1)t+ sp]. (5.115)
PROOF (a) limt→0+ g(t) = limt→∞ g(t) = ∞ and
g′(t) = p− s
t2, g′′(t) =
2s
t3.
Hence, g has a global minimum value 2√sp on (0,∞) at t =
√s/p .
(b) The fixed points of g are solutions of the equation g(t) = t, or equiva-lently of
0 = g(t) − t = tg(t) − t2 = φ(t).
Solving this quadratic equation by routine calculation readily gives the rootsstructure as claimed in (i)–(iii).
(c) The equation g2(t) = t written explicitly is
p2t+ q(p+ 1) +sp
t+
st
pt2 + qt + s= t. (5.116)
Since pt2 + qt + s has no real roots when q > −2√sp, the real solutions of
(5.116) in (0,∞) are precisely those of
t(pt2 + qt+ s)g2(t) = t2(pt2 + qt+ s).

154 Form Symmetries and Reduction of Order
After multiplying out the terms and rearranging them, the following isobtained:
p(p2 − 1)t4 + q(p+ 1)(2p− 1)t3 + [q2(p+ 1)+ 2sp2]t2 − sp(2p+ 1)t+ s2p = 0.(5.117)
The roots of the quartic polynomial on the left-hand side of (5.117) areprecisely the solutions of the equation g2(t) = t. The solutions of the latterequation obviously include the fixed points, or the roots of φ(t) so the quartic isdivisible by φ(t).Dividing in the straightforward fashion yields the polynomial
ψ(t) as the quotient.
As an initial value problem, we consider (5.111) and (5.112) to be semicon-jugate to the first-order discrete initial value problem
tn+1 = ptn + q +s
tn, t0 = x0 − cx−1 > 0. (5.118)
When c = 0 then Eq. (5.111) reduces to (5.118). On the other hand, as |c|moves away from 0, approaching 1, the behavior of solutions of (5.111) be-comes completely different from the first-order case and generally, it becomesmore complex. In this sense, c acts as a focusing parameter that relates thefirst-order equation to the second order one; however, c does not affect thefirst-order equation (5.118).
The next result on the global attractivity of the positive fixed point showsthat the coefficients of the linear terms in the numerator of Eq. (5.111) canplay a significant role in the behavior of solutions of (5.111).
THEOREM 5.7
(Global attractivity) Assume that s > 0, 0 ≤ p ≤ 1 and 0 < |c| < 1.(a) Let p < 1 and assume that
q ≥ −2p
√s
p+ 1. (5.119)
Then the positive fixed point
x =q +
√q2 + 4s(1 − p)
2(1 − p)(1 − c)
attracts all solutions of (5.111) satisfying (5.112).(b) Let p = 1. If
−√
2s ≤ q < 0 (5.120)
then all solutions of (5.111) satisfying (5.112) converge to the positive fixedpoint
x =s
q(c − 1).

Type-(k,1) Reductions 155
Ifq ≥ 0 (5.121)
then every solution of (5.111) satisfying (5.112) is unbounded.
PROOF (a) Because of Theorem 5.5 it is sufficient to prove that the fixedpoint t = x(1−c) is a global attractor for (5.118). To show that t is attractingon (0,∞) we prove that
g2(t) > t if t < t and g2(t) < t if t > t, t > 0 (5.122)
where g2(t) = g(g(t)); see the Appendix. By Lemma 5.7(c) the positivesolutions of g2(t) = t are the positive zeros of φ(t)ψ(t). The only positive zeroof φ(t) is the fixed point t. Also ψ has no positive real roots; for p > 0 itsdiscriminant is negative by (5.119):
q2(p+ 1)2 − 4sp2(p+ 1) < 0.
Therefore, the only zero of g2(t) = t in (0,∞) is t. From its explicit formin (5.116) we see that g2(t) → ∞ as t → 0+ so it must be that g2(t) > t ift < t. Also, for t sufficiently large the last two terms of g2(t) are negligibleand bounded above by ε > 0 such that ε < (1 − p2)t − q(p+ 1) and so
g2(t) ≤ p2t+ q(p+ 1) + ε = t− (1 − p2)t+ q(p + 1) + ε < t.
Thus (5.122) holds and it follows that t is a global attractor for (5.118).Therefore, x attracts all solutions of (5.111) satisfying (5.112).
(b) If p = 1 then the first inequality in (5.120) is (5.119) and the second isneeded to obtain the unique fixed point t = −s/q for (5.118). Repeating anargument similar to the proof of Part (a) shows that (5.122) holds and thus tis a global attractor in this case too.
Finally, if (5.121) holds then g(t) = t + q + s/t > t for all t > 0. Hence,for every t0 > 0, tn = gn(t0) → ∞ monotonically as n → ∞. Hence, (5.110)
implies that xn → ∞.
THEOREM 5.8
(2-cycles) Assume that
s, p > 0, 0 < |c| < 1, q < −2p
√s
p+ 1. (5.123)
Then Eq. (5.111) has a positive periodic solution with minimal (or prime)period 2 (or a 2-cycle)
ξ0 =cτ0 + τ11 − c2
, ξ1 =cτ1 + τ01 − c2

156 Form Symmetries and Reduction of Order
where
τ0 =|q| −
√q2 − 4sp2/(p+ 1)
2p, τ1 =
|q|+√q2 − 4sp2/(p+ 1)
2p. (5.124)
This 2-cycle is asymptotically stable if in addition to (5.123) the followingholds:
q > −√
2sp(2p2 + 2p+ 1)
p+ 1= −2p
√s
p+ 1
√1 +
1
2p(p+ 1). (5.125)
PROOF Conditions (5.123) imply that the polynomial ψ(t) in (5.115)has two positive roots which are readily computed as the numbers τ0, τ1 in(5.124). Since these are the non-fixed point solutions of the equation g2(t) = tit follows that {τ0, τ1} is a 2-cycle of (5.118). Lemma 5.5(a) now gives the2-cycle {ξ0, ξ1} for (5.111).
By Theorem 5.5 the 2-cycle {ξ0, ξ1} is attracting if {τ0, τ1} is an attracting2-cycle of (5.118); i.e. if
|g′(τ0)g′(τ1)| < 1.
Calculating the values of the derivative g′ we obtain
∣∣∣∣(p− s
τ20
)(p− s
τ21
)∣∣∣∣ < 1
∣∣∣∣p2 +
s2
τ20 τ
21
− sp(τ20 + τ2
1 )
τ20 τ
21
∣∣∣∣ < 1. (5.126)
Note thatτ0 + τ1 =
q
pand τ0τ1 =
s
p+ 1
imply that
τ20 + τ2
1 = (τ0 + τ1)2 − 2τ0τ1 =
q2(p+ 1) − 2sp2
p2(p + 1).
After inserting these values in (5.126) and doing some routine calculationswe obtain
4sp2
p+ 1< q2 <
2sp(2p2 + 2p+ 1)
(p+ 1)2.
This completes the proof.
REMARK 5.6 If s = p = 1 then Theorems 5.7 and 5.8 indicate that a(globally) attracting fixed point x = 1/(c− 1)q exists when
−√
2 ≤ q < 0.

Type-(k,1) Reductions 157
The fixed point x becomes unstable as the value of q goes below −√
2; there-after, the stable 2-cycle {ξ0, ξ1} in Theorem 5.8 emerges over the range
−√
5
2< q < −
√2.
Thus a period-doubling bifurcation occurs for the second-order equation (5.111)as the bifurcation parameter q decreases and crosses −
√2. Then as q crosses
−√
5/2 a second period-doubling bifurcation destabilizes the 2-cycle and cre-ates a stable 4-cycle. The mapping
g(t) = t+ q +1
t(5.127)
exhibits the usual bifurcations to higher periods that follow the Sharkovskiordering of cycles as the parameter q continues to decrease further. Therequirement that g in (5.127) be positive puts a lower bound on q; in fact, by
Lemma 5.7(a) it is necessary that q > −2√sp = −2.
The next result marks the emergence of a period 3 solution (through atangent bifurcation rather than a period-doubling one).
LEMMA 5.8
If q = −√
3 then the function g in (5.127) has a unique set of positive period3 points given by
τ0 =2√3
(1 + cos
π
9
), τ1 = g(τ0), τ2 = g(τ1). (5.128)
PROOF A period-3 point is a solution of the equation g3(t) = t, which isequivalent to
1
t+
t
t2 −√
3t + 1+
t(t2 −√
3t+ 1)
t(t− 2√
3)(t2 −√
3t+ 1) + 2t2 −√
3t + 1= 3
√3.
Multiplying out and rearranging various terms, the above equation may bewritten as the polynomial equation
P (t) = 3√
3t7 − 39t6 + 66√
3t5 − 168t4 + 77√
3t3 − 57t2 + 7√
3t− 1 = 0.
By Lemma 5.7(b)(i) g has a unique positive fixed point at 1/√
3 and nonegative fixed points so this is the only fixed point root of P (t). Factoring itout yields
P (t) = 3√
3(t− 1/
√3)Q(t)
where
Q(t) = t6 − 4√
3t5 + 18t4 − 38√
3
3t3 + 13t2 − 2
√3t+
1
3.

158 Form Symmetries and Reduction of Order
Since all the fixed points are accounted for, the 6 roots of Q give two setsof period 3 points (if they are all real). These two sets are identical if Q is aperfect square, i.e.,
Q(t) = (t3 + λt2 + ωt + σ)2. (5.129)
We show that this is in fact the case. Indeed, by matching coefficients onboth sides of (5.129) we find a set of numbers
λ = −2√
3, ω = 3, σ = − 1√3
for which (5.129) holds for all t > 0. Therefore,
P (t) = 3(√
3t− 1)
(t3 − 2
√3t2 + 3t− 1√
3
)2
.
The roots of the cubic polynomial above can be found using the standardformula with radicals; one root using this formula is found to be
τ0 =1√3
(2 + 3
√z
2+ 3
√z
2
)where z = 1 + i
√3 = 2eiπ/3.
Therefore,
τ0 =1√3
(2 + eiπ/9 + e−iπ/9
)=
1√3
(2 + 2 cos
π
9
)
as in (5.128).
LEMMA 5.9
Assume that |c| < 1.If the first order equation (5.109) has an invariant interval[µ, ν] then every solution of the second-order equation (5.108) is eventuallycontained in the planar compact, convex set:
Sµ,ν = {(x, y) : cx+ µ ≤ y ≤ cx+ ν}∩[−|c| − max{|µ|, |ν |}
1 − |c| , |c|+ max{|µ|, |ν |}1 − |c|
]2.
If (5.109) is chaotic in [µ, ν] (e.g. if f has a period-3 point) then (5.108)is chaotic in Sµ,ν .
It is clear from Theorem 5.5 and Lemma 5.9 that as long as |c| < 1 the vari-ous properties of the first-order equation (5.109) directly lead to correspondingproperties of (5.111).
The next theorem follows readily from the preceding results.
THEOREM 5.9
Let p = s = 1 in (5.111).

Type-(k,1) Reductions 159
0 1 2 3 4 50
1
2
3
4
5
6
xn−1
xn
Parameters: p=1,q=−1.8,s=1,c=0.5
FIGURE 5.5
A state-space orbit of Eq. (5.111).
(a) If q = −√
3 then (5.111) has a unique 3-cycle
ξ0 =c2τ0 + cτ1 + τ2
1 − c3, ξ1 =
c2τ1 + cτ2 + τ01 − c3
, ξ2 =c2τ2 + cτ0 + τ1
1 − c3
where τ0, τ1, τ2 are given by (5.128).
(b) If −2 < q ≤ −√
3 then Eq. (5.111) has periodic solutions of all possibleperiods.
(c) For −2 < q < −√
3 solutions of (5.111) exhibit chaotic behavior in thesense of Li and Yorke.
(d) If q > −2√
1 + c then all solutions of (5.111) with positive initial valuesare positive; i.e. (0,∞) is invariant. In particular, this is the case for all−2 < q < 0 if c > 0.
Figures 5.5, 5.6, and 5.7 illustrate Theorem 5.9. The straight lines in Figure5.5 have equations
y = cx+ µ, y = cx+ ν
where µ = g(1) = 0.2 is the minimum value of g in (5.127) when q = −1.8and ν = g(0.2) = 3.4; refer to Lemmas 5.9 and 5.7(a). Figure 5.7 shows theemergence of the 3-cycle at q = −
√3 as well as the initial period-doubling
bifurcations whose beginning is described in Theorem 5.8.

160 Form Symmetries and Reduction of Order
7 8 9 10 11 12 13 14 157
8
9
10
11
12
13
14
15
xn−1
xn
Parameters: p=1,q=−1.8,s=1,c=0.9
FIGURE 5.6
Another state-space orbit of Eq. (5.111).
FIGURE 5.7
A bifurcation diagram for Eq. (5.111).

Type-(k,1) Reductions 161
5.7 Field-inverse form symmetry
Let F be a nontrivial field and define h : F → F as h(u) = −α/u where αis a fixed nonzero element in F . As before we use the reciprocal notation forthe multiplicative inverse. The mapping h defines the form symmetry
H(u0, u1, . . . , uk) =
[u0 −
α
u1, u1 −
α
u2, . . . , uk−1 −
α
uk
].
Because H depends on the multiplicative inverse in a field we call it thefield-inverse form symmetry. This form symmetry is characterized by a changeof variables to
tn = xn − α
xn−1.
The SC factorization has the following factor and cofactor equations
tn+1 = φn(tn, . . . , tn−k+1),
xn+1 = tn+1 +α
xn.
Notice that h is a self-inverse mapping, i.e., h = h−1. The following is astraightforward consequence of Theorem 5.1.
COROLLARY 5.14
For every u0, v1, . . . , vk ∈ F let ζ0 = u0 and define
ζj =α
ζj−1 − vj, j = 1, . . . , k.
Then Eq. (2.3) has the field-inverse form symmetry if and only if the quantity
fn(u0, ζ1, . . . , ζk) − α
u0
is independent of u0.
The next example gives an application of this corollary.
Example 5.12
Consider the third-order equation
xn+1 = an +b
xn+
cxn−2
xn−1xn−2 + d(5.130)

162 Form Symmetries and Reduction of Order
where an is a sequence of real numbers and b, c, d are nonzero real numbers.For this equation we calculate
fn(u0, ζ1, ζ2) −α
u0= an +
b
u0+
cζ2ζ1ζ2 + d
− α
u0
= an +b − α
u0+
cα/(ζ1 − v2)
α2/[(u0 − v1)(ζ1 − v2)] + d.
As this expression is to be independent of u0 we set α = b and ζ1 = α/(u0−v1)to obtain
fn(u0, ζ1, ζ2) −b
u0= an +
bc(u0 − v1)
b2 + bd− d(u0 − v1)v2
If d = −b then the quantity on the right-hand side above reduces to
an +c
v2
which is independent of u0. In this case, Corollary 5.14 implies that Eq.(5.130) has the field inverse form symmetry −b/u and the following SC fac-torization:
tn+1 = an +c
tn−1,
xn+1 = tn+1 +b
xn.
5.8 Notes
References on the inversion form symmetry appear in the Notes for Chapter4. Linear form symmetries appeared in Dehghan et al. (2008a) and Sedaghat(2009c) to simplify the study of solutions of certain second-order differenceequations. In particular, the material in Section 5.6.5 is taken from Dehghanet al. (2008a) while more general results are studied in Sedaghat (2009c),including the results in Sections 5.5.2 and 5.5.3. The results in Section 5.6above in turn generalize those in Sedaghat (2009c); Corollary 5.8 provides thespecific link.
Difference equations with linear arguments appear in a variety of pure andapplied contexts. For applications involving biology see, e.g., Fisher and Goh(1984), Kocic and Ladas (1993), and Hamaya (2005). Economic models in-volving the business cycle that use difference equations with linear arguments

Type-(k,1) Reductions 163
appear in theoretical publications by prominent economists in the 20th cen-tury, e.g., Samuelson (1939), Hicks (1965), and Puu (1993). These modelsand mathematical issues pertaining to them have been discussed in detail inSedaghat (1997, 1998, 2003, 2004b), and Kent and Sedaghat (2004b) whichcollectively contain extensive bibliographies.
Discovering the invertible map criterion led to identifying more form sym-metries, including the identity and the field-inverse as is indicated in the textof this chapter; see also Sedaghat (2009d, 2009e). The material on the dis-crete Riccati equation is from Dehghan et al. (2010). For a discussion of thediscrete Riccati equation in one dimension see Kulenovic and Ladas (2002).That discussion is based on a detailed study of the solutions of a second-orderlinear difference equation.
5.9 Problems
5.1 Consider the following variation of Eq. (5.16) in Example 5.2:
xn+1 =xnxn−1
anxn−1 + bnxn−2. (5.131)
(a) Use Corollary 5.1 to show that this equation does not have the identityform symmetry.
(b) Show that Eq. (5.131) is HD1 and use the inversion form symmetry tofind a SC factorization of (5.131).
(c) Show that the reciprocal form symmetry (order-preserving) transformsthe second-order factor equation in Part (b) into a linear equation.
5.2 Show that the following variation of Eq. (5.16) in Example 5.2:
xn+1 =xn−1xn−2
anxn + bnxn−2
has the identity form symmetry and determine its SC factorization relative tothis form symmetry.
5.3 Prove Corollary 5.5.
5.4 Let βn, γn be sequences of complex numbers such that βn is not eventuallyzero. For each of the following difference equations, find the value of α thatgives the equation the linear form symmetry, then find the corresponding SCfactorization:
xn+1 = αxn +βn
xn + xn−2 + γn, xn+1 = 2ixn +
βn
xn + αxn−1 + γn.
5.5 Let a, b, c, d ∈ R and consider the second-order difference equation

164 Form Symmetries and Reduction of Order
xn+1 = axn + bxn−1 + c(xn + dxn−1)2. (5.132)
(a) Find the value of a in terms of the other parameters such that Eq.(5.132) has the linear form symmetry and determine its SC factorization.
(b) Assume that 0 < |d| < 1, b, c 6= 0 and a has the value in (a). Prove thatfor certain values of parameters b, c, d Eq. (5.132) has periodic solutions ofall possible periods within an invariant region in R2. Determine the invariantregion and the appropriate parameter ranges.
Hint. Show that the factor equation for (5.132) is conjugate to the logisticequation sn+1 = rsn(1 − sn) for some r.
5.6 Let a, b, c, p ∈ R, p, c 6= 0 and let {γn} be a given sequence in R. For eachof the following difference equations find conditions on the parameters thatimply the existence of a linear form symmetry. In each case also determinethe SC factorization.
(a) xn+1 = a(xn + bxn−1)p + cxn−k + γn ,
(b) xn+1 = axn + b(xn−j + cxn−k)p, 0 ≤ j < k.
5.7 Consider the difference equation
xn+1 = axn +δn
xn + bxn−k + ωn(5.133)
where a, b and the sequences {δn} and {ωn} are complex. Show that if b = −ak
then (5.133) has the linear form symmetry and its reduction to factor is
tn+1 =δn
tn + atn−1 + · · ·+ ak−1tn−k+1 + ωn.
5.8 Consider the following variation of Eq. (5.133)
xn+1 = axn +bn
xn−k+1 − axn−k + cn(5.134)
where a and the sequences {bn}, {cn} are real.(a) Show that Eq. (5.134) has the linear form symmetry and determine its
SC factorization.(b) Let k = 2 , 0 < |a| < 1 and let bn = b > 0 and cn = c > 0 be constant
sequences. Prove that if x0 ≥ ax−1, x−1 ≥ ax−2 then the correspondingsolution {xn} of (5.134) converges to its positive fixed point.
(c) Assume the hypotheses of Part (b) except that c = 0 and x0 > ax−1,x−1 > ax−2. Determine the global behavior of the corresponding solution{xn} of (5.134) in this case.
(d) Assume the hypotheses of Part (b) except that a = 1 (this makes(5.134) an HD1 equation). Determine the global behavior of the correspondingsolution {xn} in this case.

Type-(k,1) Reductions 165
(e) Assume the hypotheses of Part (b) except that a = −1. Determine theglobal behavior of the corresponding solution {xn} in this case.
5.9 (a) Show that the following third-order difference equation has the linearform symmetry and find its factor equation:
xn+1 = xn + 2xn−1 + ρn + eσn−bxn−3bxn−1−2bxn−2 ,
b, ρn, σn ∈ R for all n = 0, 1, 2, · · · , b 6= 0.
(b) Repeat Part (a) for the following equation
xn+1 = xn + 2xn−1 + ρn + eσn+bxn−bxn−1−2bxn−2 .
(c) Show that the second-order factor equation that is obtained in Part (b)again has the linear form symmetry and use this fact to its first-order factorequation.
5.10 Let {αn}, {βn} and {γn} be sequences of complex numbers. For alla, b ∈ C such that |a| + |b| > 0 find all values of δ for which the third-orderequation
xn+1 = axn + bxn−1 +αn(xn−1 + δxn−2)
xn + δxn−1 + βn+ γn
has the linear form symmetry and find its factor equation for each δ.
5.11 Let {σn} be a sequence of complex numbers. Determine necessary andsufficient conditions on parameters a, b, c, γ, δ ∈ C so that the third-orderdifference equation
xn+1 = axn + bxn−1 + (cxn + xn−2)eσn−γxn−δxn−1
has the linear form symmetry. Then find the second-order factor equation.(Hint. A suitable gn can be used in Example 5.6.)
5.12 Let ai, bi, ci be constants in a nontrivial field F for i = 0, 1, . . . , k. By ex-tending the ideas presented for difference equations with linear arguments andExample 5.6, show that a necessary and sufficient condition for the existenceof linear form symmetry for the difference equation
xn+1 =
k∑
i=0
aixn−i + gn
(k∑
i=0
bixn−i,
k∑
i=0
cixn−i
)
is that the following three polynomials have a common, nonzero root α ∈ F
uk+1 − a0uk − a1u
k−1 − · · · − ak−1u− ak = 0,
b0uk + b1u
k−1 + · · ·+ bk−1u+ bk = 0,
c0uk + c1u
k−1 + · · ·+ ck−1u+ ck = 0.

166 Form Symmetries and Reduction of Order
5.13 Let j = 2 in Eq. (5.85) of Example 5.10; i.e., consider the differenceequation with linear arguments
xn+1 = a0xn + · · ·+ akxn−k + gn(xn − xn−2), k ≥ 2. (5.135)
(a) Determine necessary and sufficient conditions for Eq. (5.135) to havethe linear form symmetry −αu.
(b) Find the SC factorization of (5.135) corresponding to a value α 6= 1.
5.14 Let {cn} be a periodic sequence of real numbers with period p ≥ 1 andconsider the second-order difference equation
xn+1 = αxn + cn(xn − αxn−1)q
0 < |α|, |q|< 1, cn ≥ 0 for all n.
(a) Let {cn} be a periodic sequence with period p ≥ 1. If cj > 0 for allj = 1, . . . , p then use Theorem 5.5 and the idea presented in Example 5.9 toshow that every solution of the above difference equation that originates inthe invariant region {(x, y) : x > αy} converges to a p-cycle. Also determinethis p-cycle.
(b) Use the results of Part (a) to determine the asymptotic behaviors of allsolutions of the following difference equation with nonnegative initial values:
xn+1 =2cos(nπ/3)+1/2
√2xn + xn−1
− 1
2xn.
(c) If cj = 0 in Part (a) for some j ∈ {1, . . . , p} then prove that all solutionsconverge to zero.
5.15 Complete the proof of Lemma 5.6 by doing the calculations for thepolynomial Q1.
5.16 Consider the following higher-order version of Example 5.12
xn+1 = an +b
xn+
cxn−k
xn−k+1xn−k − b
where k is a fixed positive integer.(a) Show that the above equation has the field-inverse form symmetry and
find its SC factorization.Hint : Consider a slight modification of the factor equation in Example 5.12.(b) Let an = a > 0 for all n, b, c > 0 and assume that the initial values xj
satisfy
x−k+1 > 0, xjxj−1 > b, j = −k + 2, . . . , 0.
Prove that the corresponding solution {xn} of the above difference equationconverges to a positive fixed point.
(c) Determine the behavior of {xn} in (b) if a = 0.

Type-(k,1) Reductions 167
5.17 (a) Let p > 0. Find the explicit solution of the nonautonomous linearequation
xn+1 =
[α+
β
(n+ 1)p
]xn − αβ
(n+ 1)pxn−1
and discuss the asymptotic behaviors of its solutions.Hint : See Example 5.11.(b) Find the explicit solution of the nonautonomous linear equation
xn+1 =
(α+
βn
n+ 1
)xn − αβn
n+ 1xn−1
and discuss the asymptotic behaviors of its solutions.

This page intentionally left blankThis page intentionally left blank

6
Type-(1,k) Reductions
From Section 3.3.3 recall that for a type-(1, k) reduction, m = 1 so thath : Gk → G and the form symmetry is a scalar function
H(u0, . . . , uk) = u0 ∗ h(u1, . . . , uk). (6.1)
This form symmetry is characterized by the change of variables
tn = h(xn−1, . . . , xn−k)
in Eq. (2.3), i.e.,
xn+1 = fn(xn, xn−1, . . . , xn−k) (6.2)
which yields the SC factorization
tn+1 = gn(tn) (6.3)
xn+1 = tn+1 ∗ h(xn, . . . , xn−k+1)−1. (6.4)
We note that the cofactor equation plays a role that is similar to that playedby the factor equation in Chapter 5; i.e., the roles of factor and cofactorequations are switched. Because the form symmetry component function h isnow multivariable and encodes more information, it may be more difficult toidentify. On the other hand, since H is a scalar function more technical toolsmay be available for handling it.
In this chapter we discuss classes of difference equations that have the scalarform symmetry (6.1). The classes discussed here involve separable differenceequations that are defined below. We obtain conditions on separable equa-tions that imply the existence of a form symmetry of type (6.1) that we callthe separable form symmetry. In particular, we find that linear equationspossess the separable form symmetry and the corresponding semiconjugatefactorizations as equations of type 6.3 and 6.4. Mirroring Section 5.6 above,we also discover that every linear nonhomogeneous equation with constantcoefficients has a complete SC factorization into a triangular system of first-order equations. However, this time the system is reached by a cofactor chainrather than a factor chain.
169

170 Form Symmetries and Reduction of Order
6.1 Linear form symmetry revisited
We first consider the case where h(u1, . . . , uk) = −α1u1−· · ·−αkuk is a linearfunction on a nontrivial field F with αj ∈ F for j = 1, . . . , k. In this case,
H(u0, . . . , uk) = u0 − α1u1 − · · · − αkuk (6.5)
yields a type-(1, k) linear form symmetry. Difference equations possessingthe form symmetry (6.5) have been encountered in Chapter 5 in a differentcontext. Eq. (6.2) has the form symmetry (6.5) if the unfoldings Fn satisfythe semiconjugate relation. In this case, Eq. (3.11) in Section 3.2 takes theform
fn(u0, . . . , uk) − α1u0 − · · · − αkuk−1 = gn(u0 − α1u1 − · · · − αkuk)
or equivalently,
fn(u0, . . . , uk) = α1u0 + · · ·+ αkuk−1 + gn(u0 − α1u1 − · · · − αkuk).
Therefore, equations having the form symmetry (6.5) are special types ofequations with linear arguments, specifically of type (5.94) seen in Corollary5.10. We refer to Section 5.6.3 for further details.
6.2 Separable difference equations
In this section we consider reduction of order in a class of difference equationsthat are distinct from all others that we studied in previous chapters. Thisclass of equations is characterized by the following property.
DEFINITION 6.1 Let G be a commutative group. A function φ : Gk+1 →G is separable relative to G if there are k + 1 functions φj : G → G,j = 0, 1, . . . , k such that for all u0, . . . , uk ∈ G,
φ(u0, . . . , uk) = φ0(u0) ∗ · · · ∗ φk(uk).
If fn in (6.2) is a separable function for every n then we call (6.2) a sep-arable difference equation over G.
The concept of separable in Definition 6.1 may be extended to arbitraygroups with a consideration of the ordering of terms in the factorization beingimportant; e.g.,
φ0(u0) ∗ φ1(u1) 6= φ1(u1) ∗ φ0(u0).

Type-(1,k) Reductions 171
We do not consider the general case in this book.
Example 6.1
Let R be the set of real numbers which is a field under its familiar operationsof addition and multiplication. Each of the following functions is separablewith respect to one or the other of these two operations in R:
φ(u0, u1) = au0 + bu1 + c, a, b, c ∈ R
ψ(u0, u1) = au0 +b
u1 + c,
σ(u0, u1) =au0 + b
u1 + c= (au0 + b)
1
u1 + c,
η(u0, u1) = u1eau0+bu1+c = (eau0+c)(u1e
bu1)
ξ(u0, u1, u2) = u0ua1e
bu0+cu2 = (u0ebu0)(ua
1)(ecu2 ).
6.2.1 Form symmetries of additive forms over fields
Consider a separable difference equation of the following type (written inadditive notation)
xn+1 = αn + φ0(xn) + φ1(xn−1) + · · ·φk(xn−k). (6.6)
We assume here that (6.6) is defined over a nontrivial field F where Grepresents the additive group structure of F . Specifically, we assume that
x−j, αn ∈ F , φj : F → F , j = 0, 1, . . . , k, n = 0, 1, 2, . . . (6.7)
The results in this section require the field structure. As usual, a com-monly encountered field is the complex numbers C under ordinary additionand multiplication with its subfield of all real numbers R. On the other hand,the group iR of all imaginary numbers under addition fails to be a subfield ofC since iR is not closed under the ordinary multiplication of complex numbers.
The unfolding of (6.6) is the mapping
Fn(u0, u1, . . . , uk) = (αn + φ0(u0) + · · ·+ φk(uk), u0, . . . , uk−1).
Based on the additive nature of Eq. (6.6) we look for a separable formsymmetry of type
H(u0, u1, . . . , uk) = u0 + h1(u1) + · · ·+ hk(uk) (6.8)
where hj : F → F for each j = 1, . . . , k. With these assumptions, equality(3.11) in Section 3.2 takes the form
αn+φ0(u0)+· · ·+φk(uk)+h1(u0)+· · ·+hk(uk−1) = gn(u0+h1(u1)+· · ·+hk(uk))(6.9)

172 Form Symmetries and Reduction of Order
where gn : F → F . Our aim is to determine functions hj and gn that satisfythe functional equation (6.9) and use these to obtain a form symmetry of type(6.8). We do this in two stages as indicated below:
(I) A derivation in the field of real numbersTo simplify our task and make tools from calculus available, we start our
calculations with the field R of real numbers and assume at first that thefunctions φj and hj are all differentiable on R for j = 0, . . . , k.
Taking partial derivatives of both sides of (6.9) for each of the k+1 variablesu0, u1, . . . , uk ∈ R yields the following system of k + 1 partial differentialequations:
φ′0(u0) + h′1(u0) = g′n(u0 + h1(u1) + · · ·+ hk(uk)) (6.10)
φ′1(u1) + h′2(u1) = g′n(u0 + h1(u1) + · · ·+ hk(uk))h′1(u1) (6.11)
...
φ′k−1(uk−1) + h′k(uk−1) = g′n(u0 + h1(u1) + · · ·+ hk(uk))h′k−1(uk−1)
φ′k(uk) = g′n(u0 + h1(u1) + · · ·+ hk(uk))h′k(uk). (6.12)
Taking equations (6.10) and (6.11) together, we may eliminate g′n to obtain
φ′0(u0) + h′1(u0) =
φ′1(u1) + h′2(u1)
h′1(u1). (6.13)
The variables u0 and u1 are separated on different sides of PDE (6.13) soeach side must be equal to a nonzero constant c ∈ R. The left-hand side of(6.13) gives (in single-variable notation u)
φ′0(u) + h′1(u) = c⇒ h1(u) = cu− φ0(u). (6.14)
Similarly, from the right-hand side of (6.13) we get
φ′1(u) + h′2(u)
h′1(u)= c ⇒ h2(u) = ch1(u) − φ1(u).
Note that from (6.10) and (6.14) it follows that
g′n(z0 + h1(z1) + · · ·+ hk(zk)) = c. (6.15)
Next, using (6.15) in the third equation in the above system of PDE’s gives
φ′2(u) + h′3(u)
h′2(u)= c ⇒ h3(u) = ch2(u) − φ2(u).
It is evident that this calculation can be repeated for equations 4 to k−1 inthe above system of PDE’s and the following functional recursion is establishedby induction
hj = chj−1 − φj−1, j = 1, . . . , k, h0(u).= u. (6.16)

Type-(1,k) Reductions 173
Finally, the last PDE (6.12) gives the following equality of functions
chk = φk. (6.17)
On the other hand, setting j = k in (6.16) gives hk = chk−1 − φk−1.Therefore, equality (6.17) implies the existence of a restriction on the functionsφj. To determine this restriction, first notice that by (6.17) and (6.16)
c2hk−1(u) − cφk−1(u) − φk(u) = 0 for all u.
Now, applying (6.16) repeatedly k − 1 more times eliminates the functionshj to give the following identity
ck+1u− ckφ0(u)− ck−1φ1(u)− · · · − cφk−1(u)− φk(u) = 0 for all z. (6.18)
This equality shows that the existence of form symmetries of type (6.8)requires that the given maps φ0, φ1, . . . , φk plus the identity function form alinearly dependent set. Equivalently, (6.18) determines any one of the func-tions φ0, φ1, . . . , φk as a linear combination of the identity function and theother k functions; e.g.,
φk(u) = ck+1u− ckφ0(u) − ck−1φ1(u) − · · · − cφk−1(u). (6.19)
Thus if there is c ∈ R such that (6.18) or (6.19) hold then Eq. (6.6) has aform symmetry of type (6.8). This form symmetry H can now be calculatedas follows: Using the recursion (6.16) repeatedly gives
hj(u) = cju− cj−1φ0(u) − · · · − φj−1(u), j = 1, . . .k. (6.20)
(II) Derivation of a separable form symmetry over any fieldAt this stage, note that the equations of interest in the derivation of form
symmetries, i.e., (6.18) and (6.20) are meaningful for arbitrary functions φj
over any nontrivial field F although their derivations required stronger as-sumptions. If there is a nonzero element c ∈ F for which (6.18) is satisfied forevery u ∈ F then we may use the functions hj as defined by (6.20) to definethe following separable function
H(u0, u1, . . . , uk) = u0 + h1(u1) + · · ·+ hk(uk)
= u0 +
k∑
j=1
[cjuj − cj−1φ0(uj) − · · · − φj−1(uj)].
For H to be a form symmetry, it must be surjective, i.e., H(Fk+1) = F .To show this, first note that since the constant c is in the field F , by (6.20) Fis invariant under all hj. Now, for each u ∈ F and arbitrary u1, . . . , uk ∈ Fwe may define
u0 = u− [h1(u1) + · · ·+ hk(uk)] ∈ F

174 Form Symmetries and Reduction of Order
so that u = H(u0, u1, . . . , uk). Therefore, H is surjective, hence a separableform symmetry for Eq. (6.6).
With the form symmetry calculated, we now proceed with the SC factor-ization of Eq. (6.6). To determine the first-order factor equation, the formulafor gn can be determined as follows: Note that since F is invariant under allhj it is also invariant under all gn. Since H is onto F , every element u ∈ Fcan be expressed as the image H(u0, u1, . . . , uk) of certain other elements inu0, u1, . . . , uk ∈ F . Thus, by (6.9), (6.16) and (6.17):
gn(u) = gn(u0 + h1(u1) + · · ·+ hk(uk))
= αn +k∑
j=1
[φj−1(uj−1) + hj(uj−1)] + φk(uk)
= αn + c[u0 + h1(u1) + · · ·+ hk(uk)]
= αn + cu.
This determines the factor equation (3.31) for (6.6) and the cofactor is givenby Eq. (3.32); i.e., the SC factorization of Eq. (6.6) is
tn+1 = αn + ctn, t0 = x0 + h1(x−1) + · · ·+ hk(x−k) (6.21)
xn+1 = tn+1 − h1(xn) − · · · − hk(xn−k+1). (6.22)
The following result summarizes the preceding discussion.
THEOREM 6.1
Let F be a nontrivial field. Eq. (6.6) has a separable form symmetry (6.8)if there is c ∈ F such that (6.18) holds. In this case, (6.6) has a type-(1, k)reduction to the triangular system of equations (6.21) and (6.22) of lowerorders with functions hj given by (6.20).
Example 6.2
Let F be a nontrivial field and consider the difference equation
xn+1 = αn + axn + bxn−1 + ψ(xn−k+1) + ψ(xn−k) (6.23)
where αn, a, b,∈ F for all n ≥ 0 and ψ : F → F is a given nonconstantfunction. To determine conditions that imply the existence of a separableform symmetry we use Theorem 6.1. If k = 1, 2 then indices overlap andresult in three separate cases: k = 1, k = 2 and k ≥ 3.
First suppose that k ≥ 3. If we define
φ0(u) = au, φ1(u) = bu, φk−1(u) = φk(u) = ψ(u),
φj(u) = 0 for all other values of j ≤ k

Type-(1,k) Reductions 175
then identity (6.18) yields
0 = ck+1u− ckau− ck−1bu− cψ(u) − ψ(u)
= ck−1(c2 − ac − b)u− (c+ 1)ψ(u)
which must hold for every u ∈ F . Since ψ is not constant, it follows thatc = −1 ∈ F . With this value of c,
(−1)2 − (−1)a − b = 0,
or equivalently,a = b− 1. (6.24)
If (6.24) holds then Eq. (6.23) has a separable form symmetry of type (6.8).We determine the SC factorization in this case as follows: By (6.20) and (6.24)
h1(u) = −u− au = −bu.
If 2 ≤ j ≤ k − 1 then
hj(u) = (−1)ju− (−1)j−1au− (−1)j−2bu
= (−1)j−2(1 + a− b)u
= 0
whereas
hk(u) = (−1)ku− (−1)k−1au− (−1)k−2bu− ψ(u)
= (−1)k−2(1 + a− b)u− ψ(u)
= −ψ(u).
Now (6.21) and (6.22) take the forms
tn+1 = αn − tn, t0 = x0 − bx−1 − ψ(x−k), (6.25)
xn+1 = tn+1 + bxn + ψ(xn−k+1). (6.26)
Next, assume that k = 2. Then for the third-order difference equation
xn+1 = αn + (b− 1)xn + bxn−1 + ψ(xn−1) + ψ(xn−2) (6.27)
we have
φ0(u) = (b − 1)u, φ1(u) = bu+ ψ(u), φ2(u) = ψ(u)
and again by (6.20) and (6.24)
h1(u) = −u− (b− 1)u = −bu,h2(u) = (−1)2u− (−1)(b− 1)u− bu− ψ(u) = −ψ(u).

176 Form Symmetries and Reduction of Order
Thus the SC factorization of (6.27) is
tn+1 = αn − tn, t0 = x0 − bx−1 − ψ(x−2),
xn+1 = tn+1 + bxn + ψ(xn−1).
Finally, let k = 1 to obtain the the second-order difference equation
xn+1 = αn + (b− 1)xn + bxn−1 + ψ(xn) + ψ(xn−1) (6.28)
withφ0(u) = (b− 1)u+ ψ(u), φ1(u) = bu+ ψ(u).
By (6.20) and (6.24)
h1(u) = −u− (b− 1)u− ψ(u) = −bu− ψ(u).
Thus (6.28) has a SC factorization
tn+1 = αn − tn, t0 = x0 − bx−1 − ψ(x−1)
xn+1 = tn+1 + bxn + ψ(xn).
Although calculated differently, it is evident that in the three cases above,the SC factorization of Eq. (6.23) with a = b− 1 is given by the same systemof equations (6.25) and (6.26) for all k ≥ 1.
The following result gives an application of Theorem 6.1 to second-orderequations.
COROLLARY 6.1
Let F be a nontrivial field, c ∈ F , αn a sequence in F and let ψ : F → F agiven nonconstant function.
(a) The separable, second-order equation
xn+1 = αn + ψ(xn) + c2xn−1 − cψ(xn−1) (6.29)
has a SC factorization on F into the following pair of first order equations
tn+1 = αn + ctn, t0 = x0 + cx−1 − ψ(x−1)
xn+1 = tn+1 − cxn + ψ(xn).
(b) The separable, second-order equation
xn+1 = αn + cxn − 1
cψ(xn) + ψ(xn−1) (6.30)
has a SC factorization on F into the following pair of first order equations
tn+1 = αn + ctn, t0 = x0 +1
cψ(x−1)
xn+1 = tn+1 −1
cψ(xn).

Type-(1,k) Reductions 177
PROOF To prove (a) let φ0 = ψ and note that identity (6.19) holds withk = 1. Therefore, Theorem 6.1 applies with
H(u0, u1) = u0 + h1(u1),
h1(u) = cu− ψ(u)
Part (b) is proved similarly since identity (6.19) is satisfied with φ0(u) =
cu− ψ(u)/c.
A generalization of the preceding corollary to higher-order equations ap-pears in the Problems section of this chapter. The next example concerns afinite field.
Example 6.3
Consider the second-order equation
xn+1 = αn + ψ(xn) + 4xn−1 + 3ψ(xn−1) (6.31)
on the finite field Z5. In Eq. (6.29) set c2 = 4 or c = 2. Then
3 = 5 − 2 = −2 = −c
so by Corollary 6.1(a), Eq. (6.31) has a separable form symmetry on Z5 witha SC factorization
tn+1 = αn + 2tn, t0 = x0 + 2x−1 + 4ψ(x−1)
xn+1 = tn+1 + 3xn + ψ(xn).
Example 6.4
Consider the separable, second-order difference equation
xn+1 = αn + Axn +B
xn+ axn−1 +
b
xn−1, (6.32)
A,B, a, b, αn ∈ R, n = 0, 1, 2, . . .
Define ψ(t) = at+ b/t for nonzero t ∈ R in Eq. (6.30) to obtain
xn+1 = αn + cxn − a
cxn − b
cxn+ axn−1 +
b
xn−1.
This equation is the same as (6.32) if there is a nonzero, real value of c suchthat
c− a
c= A and − b
c= B. (6.33)

178 Form Symmetries and Reduction of Order
Eliminating c from the above pair of equations yields the following quadraticidentity among the coefficients of (6.32)
b2 + bAB − aB2 = 0. (6.34)
If identity (6.34) holds then with c = −b/B obtained from (6.33), Corollary6.1 implies that Eq. (6.32) has the SC factorization
tn+1 = αn − b
Btn, t0 = x0 −
Ba
bx−1 −
B
x−1(6.35)
xn+1 = tn+1 +Ba
bxn +
B
xn. (6.36)
We note that A = aB/b − b/B from (6.34). To illustrate the usefulness ofthe SC factorization, we consider the behavior of solutions of Eq. (6.32) in aspecial case where αn = 0 for all n and B = −b. Then (6.32) reduces to
xn+1 = (1 − a)xn − b
xn+ axn−1 +
b
xn−1. (6.37)
This equation has a trivial factor equation tn+1 = tn; its cofactor is theequation
xn+1 = t0 − axn − b
xn, t0 = x0 + ax−1 +
b
x−1. (6.38)
Changes in the initial values x0, x−1 lead (through t0) to the occurrence ofbifurcations in (6.38) even for fixed values of the coefficients a, b, a fact thatis not readily apparent from a direct examination of Eq. (6.37).
To expose the source of bifurcations, suppose for brevity that
a, b > 0
and define the one parameter function
ζ(t; t0) = t0 − at− b
t.
Then ζ has a fixed point t which is a solution of the equation
t = t0 − at− b
t
or equivalently, a root of the quadratic equation
(1 + a)t2 − t0t+ b = 0.
Thus,
t =t0 ±
√t20 − 4b(1 + a)
2(1 + a).

Type-(1,k) Reductions 179
The dependence of t on the initial values x0, x−1 via t0 is noteworthy. Pos-itive real values of t are obtained if t0 ≥ 2
√b(1 + a). In particular, a tangent
bifurcation occurs when the value of t0 crosses the number 2√b(1 + a). For
values of t0 near 2√b(1 + a) it can be shown that t is an asymptotically sta-
ble fixed point. As t0 increases further, we come across a familiar pattern ofperiod-doubling bifurcations leading to stable aperiodic oscillations (eventu-ally becoming chaotic after t becomes a snap-back repeller and a homoclinicorbit appears).
These bifurcations result in qualitative changes in the behaviors of solutionsof Eq. (6.37) depending on the values of x0, x−1. Thus, using the factorequation (6.38) we conclude that (6.37) has qualitatively different, coexistingsolutions that range from stable convergent to stable aperiodic to unboundedoscillatory even with fixed, positive values of a and b. We leave a furtherexploration of Eq. (6.32) to the interested reader.
6.2.2 SC factorization of linear equations, cofactor chains
An important feature of Eq. (6.22) is that it is of the same type as (6.6).Thus if the functions h1, . . . , hk satisfy the analog of (6.18) for some constantc′ ∈ F then Theorem 6.1 can be applied to (6.22). In the important case oflinear difference equations this process can be continued until we are left witha triangular system of first-order linear equations. In Section 5.6.4 we showedthat each linear nonhomogeneous equation with constant coefficients in a fieldF has a complete SC factorization by a factor chain if F contains all of theeigenvalues of the homogeneous part of the original linear equation (e.g., ifF is algebraically closed). The resulting triangular system consists of first-order equations where the coefficients are the eigenvalues of the homogeneouspart of the original linear equation. The next result, which may be comparedwith Corollary 5.11, shows that for the same types of linear equations, thetriangular system can be also arrived at via a cofactor chain through a seriesof type(1, k) factorizations.
COROLLARY 6.2
Consider the linear nonhomogeneous difference equation of order k + 1
xn+1 + b0xn + b1xn−1 + · · ·+ bkxn−1 = αn (6.39)
with constant coefficients b0, . . . , bk and the sequence {αn} in a nontrivial fieldF . If F contains every eigenvalue of the homogeneous part, then Eq. (6.39) isequivalent to the following system of k+ 1 first-order linear nonhomogeneous

180 Form Symmetries and Reduction of Order
equations
z0,n+1 = αn + c0z0,n,
z1,n+1 = z0,n+1 + c1z1,n
...
zk,n+1 = zk−1,n+1 + ckzk,n
in which zk,n = xn is the solution of Eq. (6.39) and the constants c0, c1, . . . , ckare the eigenvalues of the homogeneous part of (6.39), i.e., they are the rootsof the characteristic polynomial
P (z) = zk+1 + b0zk + b1z
k−1 + · · ·+ bk−1z + bk. (6.40)
PROOF Define φj(z) = −bjz for j = 1, . . . k and for all z ∈ F . ApplyingTheorem 6.1 yields the linear system
z0,n+1 = αn + c0z0,n
xn+1 = z0,n+1 − β1,0xn − · · · − β1,k−1xn−k+1 (6.41)
where c0 satisfies (6.18)
ck+10 z + ck0b0z + ck−1
0 b1z + · · ·+ c0bk−1z + bkz = 0
for all z ∈ F , i.e. c0 is a root of the characteristic polynomial P in (7.41).Further, the numbers β1,j are given via the functions hj in (6.17) and (6.20)as
hj(z) = β1,j−1z, β1,j−1 = cj0 + cj−10 b0 + · · ·+ bj−1, c0β1,k−1 = −bk−1.
Alternatively, the numbers β1,j may be calculated from the recursion
β1,j = c0β1,j−1 + bj , j = 1, . . . k − 1, (6.42)
β1,0 = c0 + b0, c0β1,k−1 = −bk−1.
Now, since Eq. (6.41) is also of the same type as (6.39), Theorem 6.1 canbe applied to it to obtain the SC factorization
z1,n+1 = z0,n+1 + c1z1,n
xn+1 = z1,n+1 − β2,0xn − · · · − β2,k−2xn−k+2
in which c1 satisfies (6.18) for (6.41), i.e., with the power reduced by 1 andcoefficients adjusted appropriately; i.e.,
ck1 + β1,0ck−11 + β1,1c
k−21 + · · ·+ β1,k−2c1 + β1,k−1 = 0. (6.43)

Type-(1,k) Reductions 181
Now we show that c1 is also a root of P in (7.41). Define the new polynomial
P1(z) = zk + β1,0zk−1 + · · ·+ β1,k−2z + β1,k−1
so that by (6.43) c1 is a root of P1. Direct calculation using (6.42) shows that
(z − c0)P1(z) = zk+1 + β1,0zk + β1,1z
k + · · ·+ β1,k−1z
− c0zk − c0β1,0z
k−1 − · · · − c0β1,k−2z − c0β1,k−1
= zk+1 + (c0 + b0)zk + (c0β1,0 + b1)z
k−1 · · ·+ (c0β1,k−2 + bk−2)z
− c0zk − c0β1,0z
k−1 − · · · − c0β1,k−2z − c0β1,k−1
= P (z).
Thus, if c1 6= c0 then P (c1) = 0, i.e., c1 is a root of P as claimed. The casec1 = c0 is handled by considering the derivative of P as in the proof of Lemma5.6. We leave the details to the reader as an exercise. Now the above processinductively generates the system in the statement of this corollary.
REMARK 6.1 (Operator factorization, complementary and particularsolutions)
1. Let F = C, the algebraically closed field of complex numbers. We showthat the SC factorizations in Corollaries 5.11 and 6.2 are essentially whatis obtained through operator factorization. If Exn = xn+1 represents theforward shift operator then as is well known from the classical theory, theeigenvalues “factor” the operator P (E) with P defined by (7.41); i.e., (6.39)can be written as
(E − c0)(E − c1) · · · (E − ck)xn−k = αn. (6.44)
Now if we define(E − c1) · · · (E − ck)xn−k = y0,n (6.45)
then (6.44) can be written as
yk−1,n+1 − c0y0,n = αn
which is the first equation in the triangular system of Corollary 6.2 withy0,n = z0,n. We may continue in this fashion by applying the same idea to(6.45); we set
(E − c2) · · · (E − ck)xn−k = y1,n
and write (6.45) as y1,n+1 − c1y1,n = z0,n which is the second equation in thetriangular system if y1,n = z1,n−1. The reduction in the time index n here isdue to the removal of one occurrence of E. Proceeding in this fashion, settingyj,n = zj,n−j at each step, we eventually arrive at
(E − ck)xn−k = yk−1,n ⇒ xn+1−k = yk−1,n + ckxn−k.

182 Form Symmetries and Reduction of Order
Thus, with yk−1,n = zk−1,n−k+1 the preceding equation is the same as thelast equation in the system of Corollary 6.2.
2. In Corollaries 5.11 and 6.2 the eigenvalues and both the particular so-lution and the solution of the homogeneous part of (6.39) are simultaneouslyobtained without needing to guess linearly independent exponential solutionsas is done in the classical theory. We indicate how this is done in the second-order case k = 1 which is also representative of the higher-order cases. First,for a given sequence s = {sn} of complex numbers and for each c ∈ C, let usdefine the quantity
σn(s; c) =
n∑
j=1
cj−1sn−j
and note that for sequences s, t and numbers a, b ∈ C, σn(as + bt; c) =aσn(s; c) + bσn(t; c), i.e., σn(·, c) is a linear operator on the space of com-plex sequences for each n ≥ 1 and each c ∈ C. Further, if sn = abn then it iseasy to see that
σn(s; c) =
{a(bn − cn)/(b− c), c 6= banbn−1, c = b
. (6.46)
Now, if k = 1 then the semiconjugate factorization of (6.39) into first orderequations is
zn+1 = αn + c0zn, z0 = x0 + (c0 − b0)x−1 (6.47)
xn+1 = zn+1 + c1xn. (6.48)
A straightforward inductive argument gives the solution of (6.47) as
zn = z0cn0 + σn(α; c0) (6.49)
where α = {αn}. Next, insert (6.49) into (6.48), set γn = zn+1 and repeatthe above argument to obtain the general solution of (6.39) for k = 1, i.e.,xn = x0c
n1 + σn(γ; c1). If c1 6= c0 then from (6.46) we obtain after combining
some terms and noting that γ0 = z1 = α0 + c0z0,
xn =
(α0 + c0z0c0 − c1
)cn0 +
(x0 −
α0 + c0z0c0 − c1
)cn1 + σn(σ′(α; c0); c1)
where σ′ = {σn+1(α; c0)}. We recognize the first two terms of the above sumas giving the solution of the homogeneous part of (6.39) and the last term asgiving the particular solution. In the case of repeat eigenvalues, i.e., c1 = c0again from (6.46) we get
xn = [x0c0 + (α0 + c0z0)n]cn−10 + σn(σ′(α; c0); c0).

Type-(1,k) Reductions 183
6.2.3 Form symmetries of multiplicative forms over subgroupsof C\{0}
In this section we study a class of separable difference equations whose formsymmetries involve exponential and power functions. Therefore, we limit ourfocus to the set C of complex numbers. On the other hand, a field structureis not required in this section so we stay with groups.
Let G be a nontrivial subgroup of the group C0 = C\{0} of nonzero complexnumbers under multiplication. Obvious examples of G include the sets R\{0}and (0,∞) of nonzero real numbers and the positive real numbers, respectively,each under ordinary multiplication. Another important subgroup of C0 is thecircle group T. Aside from R and T and their subgroups, there are alsocountable multiplicative subgroups of C such as the cyclic groups
Ga = {an : n ∈ Z, |a| 6= 0, 1}
and the dense subgroup
Cr = {z : Re z, Im z ∈ Q, z 6= 0}
of complex numbers with rational real and imaginary parts. See the Problemssection for this chapter for examples of nontrivial difference equations havingthese groups as invariant sets.
Consider the following difference equation
xn+1 = αnψ0(xn)ψ1(xn−1) · · ·ψk(xn−k), (6.50)
αn, x−j ∈ G, ψj : G→ G, j = 0, . . . k. (6.51)
This difference equation is clearly separable on G in the sense of Definition6.1. If G = (0,∞) then Eq. (6.50) can be transformed into the additivelyseparable equation (6.6) by taking logarithms to change its multiplicative forminto an additive one. Specifically by defining
x′n = lnxn, xn = ex′
n , lnαn = α′n, φj(r) = lnψj(e
r), j = 0, . . .k, r ∈ R
we can transform (6.50) into (6.6), which is additively separable. For thisspecial situation, Theorem 6.1 gives the form symmetry H that can be trans-formed into a multiplicative form by applying the exponential function. Animportant feature of this multiplicative version of the form symmetry for(0,∞) is that it does not involve the exponential or logarithmic functions.Therefore, it is a possible form symmetry of the multiplicative equation 6.50)for all subgroups of C0 under suitable conditions. This is established in thenext theorem which is proved directly, without using the additive Theorem6.1. This proof does not use complex logarithms so its conclusion is valid forall nontrivial subgroups of C0.

184 Form Symmetries and Reduction of Order
THEOREM 6.2
Let G be a nontrivial subgroup of C0 and let αn, x−j, ψj be as in (6.51). Ifthere is c ∈ C0 such that the following is true for all z ∈ G,
ψ0(z)ck
ψ1(z)ck−1 · · ·ψk(z) = zck+1
(6.52)
then Eq. (6.50) has the form symmetry
H(u0, u1, . . . , uk) = u0h1(u1) · · ·hk(uk), u0, u1, . . . , uk ∈ G (6.53)
where the functions hj : G→ C in (6.53) are given as
hj(z) = zcj
ψ0(z)−cj−1 · · ·ψj−1(z)
−1, j = 1, . . . k, z ∈ G (6.54)
This form symmetry yields a type-(1, k) order reduction with the SC factor-ization
tn+1 = αntcn, t0 = x0h1(x−1) · · ·hk(x−k) (6.55)
xn+1 =tn+1
h1(xn) · · ·hk(xn−k+1). (6.56)
PROOF The unfoldings or associated vector functions Fn of Eq. (6.50)are
Fn(z0, z1, . . . , zk) = [αnψ0(z0)ψ1(z1) · · ·ψk(zk), z0, z1, . . . , zk−1]
where (z0, z1, . . . , zk) ∈ Gk+1. Therefore, if H is defined by (6.53) and (6.54)then
H(Fn(z0, z1, . . . , zk)) = αnψ0(z0) · · ·ψk(zk)h1(z0)h2(z1) · · ·hk(zk−1)
= αnψ0(z0)ψ1(z1) · · ·ψk−1(zk−1)ψk(zk)[zc0ψ0(z0)
−1]
[zc2
1 ψ0(z1)−cψ1(z1)
−1] · · · [zck
k−1ψ0(zk−1)−ck−1
· · ·ψk−1(zk−1)−1]
= αnψk(zk)zc0z
c2
1 ψ0(z1)−c · · · zck
k−1ψ0(zk−1)−ck−1 · · ·
· · ·ψk−1(zk−1)−c.
On the other hand, if we define φn(z) = αnzc as in (6.55) for all z ∈ G and
all integers n ≥ 0 then
φn(H(z0 , z1, . . . , zk)) = αn[z0h1(z1)h2(z2) · · ·hk(zk)]c
= αnzc0[z
c1ψ0(z1)
−1]c · · · [zck−1
k−1 ψ0(zk−1)−ck−2 · · ·
· · ·ψk−1(zk−1)−1]c[hk(zk)]c
= αnzc0z
c2
1 ψ0(z1)−c · · ·zck
k−1ψ0(zk−1)−ck−1 · · ·
· · ·ψk−1(zk−1)−cψk(zk)

Type-(1,k) Reductions 185
where the last equality follows by (6.52) because
[hk(zk)]c = zck+1
k ψ0(zk)−ck · · ·ψk−1(zk)−c = zck+1
k z−ck+1
k ψk(zk) = ψk(zk).
Hence the semiconjugate relation holds for each n.
To establish the equivalence of (6.50) to the system of equations (6.55) and(6.56) we show that every solution {xn} of (6.50) corresponds uniquely to asolution {(tn, yn)} of the system and vice versa. First, let {xn} be the uniquesolution of (6.50) generated by a given set of initial values x0, x−1, . . . , x−k inG and define the sequence
tn = H(xn, . . . , xn−k).
Then the semiconjugate relation implies that
tn+1 = H(xn+1, xn, . . . , xn−k+1)
= H(αnψ0(xn) · · ·ψk(xn−k), xn, xn−1, . . . , xn−k+1)
= H(Fn(xn, . . . , xn−k))
= φn(H(xn, . . . , xn−k))
= φn(tn).
Therefore, {tn} is the solution of equation (6.55) that is uniquely definedby the initial value
t0 = x0h1(x−1) · · ·hk(x−k).
Further, notice that
xn+1h1(xn) · · ·hk(xn−k+1) = H(xn+1, xn, . . . , xn−k+1) = tn+1
so that (6.56) holds with yn = xn for all n ≥ −k.Conversely, let {(tn, yn)} be the unique solution of the system of equations
(6.55) and (6.56) with a given set of initial values
t0, y−1, y−2, . . . , y−k ∈ G. (6.57)
We note that t0 generates the sequence {tn}, which satisfies (6.55) inde-pendently of (6.56). These values tn then contribute to the calculation of thesequence {yn}, which satisfies (6.56). By the latter equation,
tn+1 = yn+1h1(yn) · · ·hk(yn−k+1)
= H(yn+1, . . . , yn−k+1).

186 Form Symmetries and Reduction of Order
It follows that for all n ≥ 0, tn = H(yn, . . . , yn−k). Now by (6.55), (6.56)and the definition of H,
yn+1 =φn(tn)
h1(yn) · · ·hk(yn−k+1)
=φn(H(yn, . . . , yn−k))
h1(yn) · · ·hk(yn−k+1)
=H(Fn(yn, . . . , yn−k))
h1(yn) · · ·hk(yn−k+1)
=H(αnψ0(yn) · · ·ψk(yn−k), yn, yn−1, . . . , yn−k+1)
h1(yn) · · ·hk(yn−k+1)
= αnψ0(yn) · · ·ψk(yn−k).
It follows that {yn} is a solution of (6.50) with initial values (6.57).
Example 6.5
Let G be a nontrivial subgroup of C0 and let αn ∈ G for all n ≥ 1. Considerthe multiplicatively separable difference equation
xn+1 = αnxnxn−1, x0, x−1 ∈ G. (6.58)
In Eq. (6.58) we may define ψ0(z) = ψ1(z) = z for all z ∈ G. Condition (6.52)holds if there is c ∈ C such that
zcz = zc2
for all z ∈ G.
Thus c must be a root of the polynomial
c2 − c− 1 = 0, (6.59)
e.g., the positive root
c =1 +
√5
2.
The form symmetry is H(u0, u1) = u0h1(u1) where h1(z) = zcz−1 = zc−1.The SC factorization of (6.58) is thus
rn+1 = αnrcn, r0 = x0x
c−1−1 (6.60)
xn+1 = rn+1x1−cn . (6.61)
Note that the number 1 − c is the other root of the polynomial (6.59);therefore, the factor and cofactor equations of (6.58) involve the two rootsof the same polynomial (6.59). Not surprisingly, if G = (0,∞) then thetransformation of (6.58) via logarithms into a linear nonhomogeneous equationon the real line also shows the roots of (6.59) to be the eigenvalues of the

Type-(1,k) Reductions 187
linear equation. In this case, the behavior of solutions of (6.58) reflect thelinear behavior since the real exponential and logarithm are homeomorphismsand isomorphisms of (0,∞) and R. However, as noted in Chapter 2, solutionsof (6.58) may exhibit a different behavior in a different subgroup of C0.
For instance, if T is the circle group and αn = eian for an ∈ R then T isinvariant under (6.58) and its SC factorization. The factor equation (6.60)can be written as
θn+1 = (an + cθn)mod 2π, eiθn = rn
which leads to a dense orbit in T in most cases, even if an is a constantsequence. Similarly, the cofactor equation (6.61) can be written as
ξn+1 = [θn+1 + (1 − c)ξn] mod2π, eiξn = xn
whose orbits are generally dense in T.
The preceding example highlights a feature of the SC factorization in The-orem 6.2 that is reminiscent of linear equations, namely, that even if G isinvariant under Eq. (6.58) then its SC factorization need not be (since G neednot be invariant under the functions hj). For instance, if αn, x0, x−1 ∈ R, thenumbers rn may be complex; e.g., if x0 = −1, x−1 = 1 and αn = 1 for all nthen r0 = −1 so that
r1 = (−1)c = cos πc+ i sinπc
is not real for the above value of c. Of course, the numbers xn are real sincethe set of nonzero real numbers is invariant under (6.58); for instance,
x1 = r1x1−c0 = (−1)c(−1)1−c = −1.
This phenomenon is similar to what is seen in linear equations having realcoefficients but complex eigenvalues.
Example 6.6
Let G be a nontrivial subgroup of C0 and let ψ : G → G be a given function.For positive integers k,m with k > m ≥ 0, consider the separable differenceequation
xn+1 = αnψ(xn−m)ψ(xn−k)xn−k, (6.62)
x0, x−1, . . . , x−k, αn ∈ G for all n ≥ 0.
Special cases of Eq. (6.62) include the following that are obtained by special-izing the function ψ:
xn+1 = αn(xn−m + β)(xn−k + β)xn−k, β ∈ G,
xn+1 =αnxn−k
(xn−m + β)(xn−k + β), β ∈ G,
xn+1 = xn−keγn−βxn−m−βxn−k , β, γn ∈ G.

188 Form Symmetries and Reduction of Order
Eq. (6.62) is of type (6.50) with
ψj(z) =
ψ(z), if j = mzψ(z), if j = k1, if j 6= m, k
.
Identity (6.52) is satisfied if there is c ∈ C0 such that
zck+1−1 = ψ(z)ck−m+1 for all z ∈ G. (6.63)
For arbitrary ψ, identity (6.63) holds only if both exponents are zeros, i.e., ifc is both a (k+ 1)-st root of unity and a (k−m)-th root of −1. This value ofc is determined by the delay pattern (the values of m and k). Some specialcases are listed below:
xn+1 = αnψ(xn)ψ(xn−1)xn−1, c = −1; (6.64)
xn+1 = αnψ(xn−1)ψ(xn−3)xn−3, c = i; (6.65)
xn+1 = αnψ(xn−3)ψ(xn−7)xn−7, c = eiπ/4 = (1 + i)/√
2. (6.66)
The SC factorization of Eq. (6.64) is
tn+1 =αn
tn, xn+1 = tn+1xnψ(xn).
For the SC factorizations of the other two equations see the Problems forthis chapter.
The difference equation (6.56) has order k, one less than (6.50), and byTheorem 3.1 its solutions subject to the conditions of Lemma 6.2 are identicalto the solutions {xn} of (6.50). In this sense, we may think of the cofactorequation (6.56) as a reduction of order of (6.50) and to distinguish it from(6.50), we may write it as an independent equation in a new variable
yn+1 = tn+1h1(yn)−1 · · ·hk(yn−k+1)−1. (6.67)
The variable coefficient tn+1 is calculated independently from the simplefirst-order equation (6.55) by induction as stated in the next lemma whosestraightforward proof is left as an exercise.
LEMMA 6.1
The general solution of Eq. (6.55) is
tn+1 = tcn+1
0
n∏
j=0
αcj
n−j. (6.68)
If αn = α is constant for all n (i.e., (6.50) is an autonomous equation)then
tn+1 =
{ρ(t0/ρ)
cn+1
with ρ = α1/(1−c), if c 6= 1,t0α
n+1, if c = 1..

Type-(1,k) Reductions 189
6.3 Equations with exponential and power functions
In this section we use Theorem 6.2 to explore multiplicatively separable dif-ference equations of the following type
xn+1 = xa0
n xa1
n−1 · · ·xak
n−keαn−b0xn−b1xn−1−···−bkxn−k (6.69)
that consist only of complex exponential and power functions. We generallyassume that the parameters are complex because, like the case of linear equa-tions, the SC factorizations of (6.69) often yield complex parameters even ifthe original parameters are real.
Positive solutions of (6.69) are guaranteed to exist if
aj, bj, βn ∈ R, x−j > 0, j = 0, 1, . . . , k, n = 0, 1, 2, . . . (6.70)
Under these conditions Eq. (6.69) is separable on the invariant multiplica-tive group (0,∞). Conditions (6.70) hold for equations that appear in appliedcontexts; under these conditions, Eq. (6.69) can have a wide variety of pos-itive solutions as we will see in some of the examples in this section. Asignificant and helpful aspect of the positive solutions under conditions (6.70)is that they do not involve the technical complications due to multiple-valuedcomplex power functions. Further, most applied models involve real param-eters and positive solutions. However, even in the case of positive solutionson (0,∞) under conditions (6.70) the SC factorization of (6.69) may involvecomplex parameters in its factor or cofactor equation.
Because Eq. (6.69) involves only power and exponential functions we referto it as an expow equation for short. Note that (6.69) can also be written inthe equivalent though more stylized form
xn+1 = γnxa0
n xa1
n−1 · · ·xak
n−kβxn
0 βxn−1
1 · · ·βxn−k
k
where βj = e−bj for j = 0, 1, . . . , k and γn = eαn for all n. As is customary, ifaj = 0 for some j then we set x
aj
n−j = 1.
6.3.1 The reduction theorem
To find sufficient conditions on the parameters aj, bj that allow a reductionof order of (6.69) via Theorem 6.2 and Lemma 6.1, the functions
ψj(z) = zaje−bjz, j = 0, 1, . . . , k
must satisfy identity (6.52); i.e., for some c ∈ C0 the following must hold forall z ∈ G
za0ck
e−b0ckzza1ck−1
e−b1ck−1z · · ·zake−bkz = zck+1
. (6.71)

190 Form Symmetries and Reduction of Order
After some rearranging of terms, we see that identity (6.71) holds for all zif c is a common nonzero root of the polynomials
P0(z) = zk+1 − a0zk − a1z
k−1 − · · · − ak,
Q0(z) = b0zk + b1z
k−1 + · · ·+ bk.
For such c ∈ C0 the form symmetry and semiconjugate factorization aredetermined using the functions
hj(z) = zcj
ψ0(z)−cj−1 · · ·ψj−1(z)
−1 (6.72)
= zcj−a0cj−1−···−aj−1e(b0cj−1+b1cj−2+···+bj−1)z
as shown in the following result.
THEOREM 6.3
Assume that the polynomials P0 and Q0 have a common root c0 ∈ C0. Thenthe following statements are true:
(a) Eq. (6.69) has a reduction of order to the expow equation
yn+1 = tn+1y−p0,0
n y−p0,1
n−1 · · ·y−p0,k−1
n−k+1 e−q0,0 yn−q0,1 yn−1−···−q0,k−1 yn−k+1 ,
(6.73)where for j = 0, 1, . . . , k − 1,
p0, j = cj+10 − a0c
j0 − a1c
j−10 − · · · − aj−1c0 − aj, (6.74)
q0, j = b0cj0 + b1c
j−10 + · · ·+ bj−1c0 + bj (6.75)
and
tn+1 = tcn+1
0
0 eσn , σn =
n∑
j=0
αn−jcj0, t0 = x0h1(x−1) · · ·hk(x−k).
(b) Let c1 ∈ C0 be also a common root of both P0 and Q0. Then c1 is aroot of both of the following polynomials
P1(z) = zk + p0, 0zk−1 + p0,1z
k−2 + · · ·+ p0,k−1,
Q1(z) = q0,0zk−1 + q0,1z
k−2 + · · ·+ q0,k−1
so by Part (a) the expow equation (6.73) has a reduction of order to
zn+1 = rn+1z−p1,0n z
−p1,1
n−1 · · ·z−p1,k−2
n−k+2 e−q1,0zn−q1,1zn−1−···−q1,k−2zn−k+2 , (6.76)
where for i = 0, 1, . . . , k − 2,
p1,i = ci+11 + p0,0c
i1 + p0,1c
i−11 + · · ·+ p0,i−1c1 + p0,i,
q1,i = q0,0ci1 + q0,1c
i−11 + · · ·+ q0,i−1c1 + q0,i

Type-(1,k) Reductions 191
and
rn+1 = rcn+1
1
0
n∏
j=0
tcj1
n+1−j.
PROOF (a) The proof of this part is straightforward by induction using(6.72) in (6.67), then combining various exponents and finally using Lemma6.1 (with βn = eαn) for the numbers tn+1. We leave the details as an exercise.
(b) By assumption,P0(c1) = Q0(c1) = 0. (6.77)
Now
(z − c0)P1(z) = (z − c0)
zk +k−1∑
j=0
p0, jzk−j−1
= zk+1 +
k−1∑
j=0
[p0, j − c0p0, j−1]zk−j − c0p0,k−1
where we define p0,−1 = 1. From (6.74) for each j = 0, 1, . . . , k − 1 we obtain
p0, j − c0p0, j−1 = −aj
and further, since P0(c0) = 0,
c0p0,k−1 = c0(ck0 − a0c
k−10 − · · · − ak−1
)
= P0(c0) + ak
= ak.
Thus(z − c0)P1(z) = P0(z)
and if c1 6= c0 then P1(c1) = 0 by (6.77). If c1 = c0 then c0 is a double rootof both P0 and Q0 so that their derivatives are zeros, i.e.,
P ′0(c0) = Q′
0(c0) = 0. (6.78)
In this case, using (6.74) we obtain
P1(c0) = ck0 +
k−1∑
j=0
(cj+10 − a0c
j0 − · · · − aj−1c0 − aj)c
k−j−10
= (k + 1)ck0 −k−1∑
j=0
(k − j)ajck−j−10
= P ′0(c0).

192 Form Symmetries and Reduction of Order
Therefore, if c1 = c0 then P1(c1) = 0 by (6.78). Similar calculations show thatQ1(c1) = 0; thus by Part (a) Eq. (6.73) has a semiconjugate factorization.
The factorization is obtained as in Part (a). For Eq. (6.76) we need onlychange aj to −p0, j and bj to q0, j in our hypotheses for each j = 0, 1, . . . , k−1to obtain the new numbers p1,i and q1,i for (6.76) as stated in the statement
of the theorem.
6.3.2 Reductions in orders of expow equations
The next result applies Theorem 6.3 to second-order expow equations. Thesimilarity of hypotheses between this result and Corollary 5.8 is rather inter-esting.
COROLLARY 6.3
Let a0, a1, b0, b1, αn ∈ C for n ≥ 1 such that
b21 + a0b0b1 − a1b20 = 0, b1 6= 0. (6.79)
Then the second-order expow equation
xn+1 = xa0
n xa1
n−1eαn−b0xn−b1xn−1 (6.80)
has a reduction of order to the first-order equation
yn+1 = tcn+1
0 ya0−cn eσn−b0yn , c = −b1/b0, y0 = x0, (6.81)
σn =
n∑
j=0
αn−jcj , t0 = x0x
c−a0
−1 eb0x−1 .
In particular, if a0, a1, b0, b1, αn ∈ R for n ≥ 1 then c ∈ R and reduction oforder is defined on R.
PROOF First we note that conditions (6.79) imply that b0 and at leastone of a0, a1 are nonzero. Now c = −b1/b0 is the unique nonzero root of Q0
and by the equality in (6.79),
c2 − a0c− a1 =b21b20
+ a0b1b0
− a1 = 0.
So the above value of c is also a root of P0. Now the proof is completed byapplying Theorem 6.3. The last assertion is obivous.
In the next corollary, like Corollary 6.3, the reductions of order are definedover the real numbers if the parameters are real.

Type-(1,k) Reductions 193
COROLLARY 6.4
Let k ≥ 1, b0, bk ∈ C with bk 6= 0 and αn ∈ C for n ≥ 0. Consider the expowdelay equation:
xn+1 = xn−1eαn−b0xn−bkxn−k . (6.82)
(a) Eq. (6.82) has two possible reductions of order: (i) If bk = −b0 then
yn+1 =t0yneσn−b0yn−b0yn−1−···−b0yn−k+1 , (6.83)
tn+1 = t0eσn , σn =
n∑
j=0
αj, (6.84)
t0 = x0x−1eb0(x−1+x−2+···+x−k+1).
(ii) If k is odd and bk = b0 then
yn+1 = tn+1yne−b0yn+b0yn−1−···+(−1)k−1b0yn−k+1 , (6.85)
tn+1 = t(−1)n+1
0 eσn , σn =
n∑
j=0
(−1) jαn−j, (6.86)
t0 =x0
x−1eb0(x−1−x−2+···+(−1)k−1x−k+1).
(b) If k is even then the expow equation (6.83) has a further reduction of orderto
zn+1 = rn+1e−b0zn+b0zn−2−b0zn−4+···+(−1)k−1b0zn−k+2 ,
rn+1 = r(−1)n+1
0
n∏
j=0
t(−1) j
n+1−j, r0 = x0eb0(x0−x−2+···+(−1)kx−k+2).
(c) If b0, bk ∈ R with bk 6= 0 and αn ∈ R for all n then the reductions of orderin Parts (a) and (b) are defined on R.
PROOF (a) Since a1 = 1 and aj = 0 for j 6= 1, we have
P0(c) = ck+1 − ck−1 = 0 ⇒ ck−1(c2 − 1) = 0 ⇒ c = ±1.
If c = 1 then Q0(c) = b0 + bk = 0 or bk = −b0. Applying Theorem 6.3 withc = 1 yields the claimed reduction of order. The other order reduction forodd k is obtained similarly with c = −1.
(b) In Eq. (6.83) which has order k the new parameter values are a0 = −1and aj = 0 for j > 0. Now P0(c) = ck+ck−1 = 0 yields a nonzero value c = −1.This must also be a root of Q0; since the new values of the parameters bj arebj = b0 for j = 0, . . . , k − 1 we must have
(−1)k−1b0 + (−1)k−2b0 + · · ·+ (−1)b0 + b0 = 0. (6.87)

194 Form Symmetries and Reduction of Order
With b0 6= 0 (6.87) holds if and only if k is even, in which case applyingTheorem 6.3 with c = −1 yields the stated reduction of order for (6.83).
(c) This is clear since c = ±1 is real in Parts (a) and (b).
The following result involves a more general delay pattern than that in Part(a)(i) of Corollary 6.4, i.e., when the parameters b0, bk have equal magnitudesbut opposite signs.
COROLLARY 6.5
For k,m ≥ 1, β ∈ C0 and αn ∈ C for n ≥ 0 the expow delay equation
xn+1 = xn−meαn+βxn−βxn−k (6.88)
has a reduction of order to
yn+1 =t0e
σn−β(yn+yn−1+···+yn−k+1)
ynyn−1 · · ·yn−m+1,
σn =
n∑
j=0
αj, t0 = x0x−1 · · ·x−m+1eβ(x−1+x−2+···+x−k+1).
For m = 0 Eq. (6.88) has a reduction of order to
yn+1 = t0eσn−β(yn+yn−1+···+yn−k+1).
PROOF First assume that k ≥ m ≥ 1. Then
P0(c) = ck+1 − amck−m = ck−m(cm+1 − 1)
Q0(c) = −βck + β.
Clearly c = 1 is a common nonzero root of P0 and Q0 so Theorem 6.3 canbe applied to obtain the order reduction by calculating
p0, j =
{cj+1 = 1, if j < mcj+1 − amc
j−m = 0 if j ≥ m
and
q0, j =
{b0c
j = −β, if j < kb0c
j + bk = −β + β = 0, if j = k.
Next, if m > k ≥ 1 then
P0(c) = cm+1 − am = cm+1 − 1
Q0(c) = −βcm + βcm−k = −βcm−k(ck − 1).
Again c = 1 is a common nonzero root of P0 and Q0 so Theorem 6.3 canbe applied similarly to the preceding case.

Type-(1,k) Reductions 195
In the case m = 0 we have
P0(c) = ck+1 − a0ck = ck(c − 1), Q0(c) = −βck + β.
Thus c = 1 is a common nonzero root and the proof is completed by apply-ing Theorem 6.3.
The following result generalizes the delay pattern in Part (a)(ii) of Corollary6.4, i.e., when the parameters b0, bk are equal. The proof follows the sameargument as in the preceding corollary by showing that c = −1 is a commonroot of P0 and Q0. We omit the details of this proof.
COROLLARY 6.6
For k,m ≥ 1, β ∈ C0 and αn ∈ C for n ≥ 0 the expow delay equation
xn+1 = xn−2m+1eαn−βxn−βxn−2k+1 (6.89)
has a reduction of order to
yn+1 =t(−1)n+1
0 ynyn−2 · · ·yn−2m+2
yn−1yn−3 · · ·yn−2m+3eσn−β[yn−yn−1+···−yn−2k+2 ],
σn =
n∑
j=0
(−1)jαn−j, t0 =x0x−2 · · ·x−2m+2
x−1x−3 · · ·x−2m+3eβ(x−1−x−2+···+x−2k+1).
Example 6.10 below uses the order reduction in Corollary 6.6 to study thepositive solutions of a special case of Eq. (6.89).
6.3.3 Repeated reductions of order
It is of interest that Eq. (6.73) in Theorem 6.3 is again an expow equationsimilar to (6.69). This suggests that the methods of the preceding section canbe applied to (6.73). Indeed, under the conditions in Part (b) of Theorem6.3 a further reductions of order was obtained by repeating the semiconjugatefactorization process. A similar situation was encountered in Part (b) ofCorollary 6.4.
The main impediment to repeatedly using Theorem 6.3 in this way is therequirement that the polynomialsP0 andQ0 have common nonzero roots. Thenext result illustrates a special case in which P0 and Q0 reduce to a singlepolynomial and thus, the factorization process continues until a triangularsystem of first-order equations is obtained. In this way the original equationof order k + 1 is reduced to an equation of order one.
COROLLARY 6.7
The expow equation
xn+1 = xa0
n xa1
n−1 · · ·xak−1
n−k+1eαn+bxn−a0bxn−1−···−ak−1bxn−k (6.90)

196 Form Symmetries and Reduction of Order
where for j = 0, 1, . . . , k − 1 and all n ≥ 0,
aj , αn, b ∈ C, ak−1 6= 0
has a complete semiconjugate factorization into a triangular system of firstorder equations over C0.
PROOF First assume that b 6= 0. For Eq. (6.90) setting P0(c) = Q0(c) = 0gives
ck+1 − a0ck − a1c
k−1 − · · · − ak−1c = 0,
bck − ba0ck−1 − · · · − bak−1 = 0. (6.91)
Since ak−1 6= 0 the nonzero roots of the above polynomials are identical tothe zeros of the following polynomial
P (c) = ck − a0ck−1 − · · · − ak−1.
Note that every root of P (c) is nonzero and a root of both P0 and Q0.Therefore, by Theorem 6.3, not only Eq. (6.90) has a semiconjugate factor-ization, but also if k > 1 then the factorization process continues until theorder of the cofactor equation is reduced to one.
Finally, if b = 0 (no exponential functions) then Eq. (6.91) reduces to a
trivial identity so once again only one polynomial P (c) remains.
We point out that by denoting eαn = γn and e−b = β, Eq. (6.90) can bewritten in the following more symmetric form
xn+1 = γnxa0
n xa1
n−1 · · ·xak−1
n−k+1β−xnβa0xn−1 · · ·βak−1xn−k .
Example 6.7
For each positive integer k, the expow delay equation
xn+1 = xan−k+1e
αn+bxn−abxn−k , a, b, αn ∈ R, a, b 6= 0 (6.92)
is clearly of type (6.90), so by Corollary 6.7 it has a complete semiconjugatefactorization into a triangular system of first-order equations. The polynomialP (c) = ck − a in this case so the common nonzero roots of P0 and Q0 are justthe k-th roots of a.
In particular, if k = 2 then the polynomial P (c) = c2 − a has roots ±√a.
Using Theorem 6.3 we obtain the following sysetm of first order equations
tn+1 = eαnt√
an ,
rn+1 = tn+1r−√
an ,
yn+1 = rn+1ebyn .

Type-(1,k) Reductions 197
Note that if a < 0 then the above system is defined over the complex numberseven though all parameters in Eq. (6.92) are real. This situation is analo-gous to the previously discussed case of a linear difference equation with realcoefficients having complex eigenvalues.
6.3.4 Solutions of equations containing only power functions
In the preceding sections of this chapter the SC factorization of expow equa-tions was of primary interest rather than their solutions. Expow equations arecapable of generating interesting and complex solutions. Later in this chapterwe discuss an expow equation that is derived from a population biology modelwhose real solutions exhibit multistable, chaotic behavior. In this section weexamine the solutions of a different special type of expow equation in thecomplex plane.
The case b = 0 in Corollary 6.7 corresponds to the pure power-functionscase
xn+1 = γnxa0
n xa1
n−1 · · ·xak−1
n−k+1, ak−1 6= 0. (6.93)
As Corollary 6.7 shows, this equation admits repeated reductions of orderso the methods of preceding sections apply. The equations of lower orderthat we obtain through a semiconjugate factorization can be readily solvedin some cases to yield useful information about the nature of the solutions ofEq. (6.93); see the Problems for this chapter. It is also possible to obtain awealth of information about (6.93) by studying the moduli of terms of eachsolution. We explore this idea next.
Eq. (6.93) bears a similarity to the linear nonhomogeneous difference equa-tion of order k ≥ 1. If aj ∈ R for j = 0, 1, . . . , k − 1and x−j , γn ∈ (0,∞) for0 ≤ j ≤ k − 1 and n ≥ 0 then xn ∈ (0,∞) for all n. Defining yn = lnxn andtaking the logarithm of (6.93) gives the linear equation
yn+1 = a0yn + a1yn−1 + · · ·ak−1yn−k+1 + δn, δn = ln γn. (6.94)
The characteristic polynomial of (6.94) is precisely P in the proof of Corol-lary 6.7. Therefore, the eigenvalues of the homogeneous part of (6.94) com-pletely determine the SC factorization of (6.93). Further, for every solution{yn} of (6.94), the sequence {eyn} is a positive solution of (6.93).
The preceding observations do not reduce the study of (6.93) to (6.94) sincethe linear equation only generates the positive solutions of (6.93). However,a more judicious use of the linear equation does yield substantial informationabout an important special case of (6.93) in the complex plane.
Consider the case where all exponents are real numbers; i.e., aj ∈ R forj = 0, 1, . . . , k − 1 but allow x−j, γn ∈ C0 for 0 ≤ j ≤ k − 1 and n ≥ 0.Unless every aj is an integer, the powers x
aj
n−j are multiple-valued for eachn and solutions of (6.93) are not uniquely defined in C0. However, sincethe exponents aj are real, the moduli of these powers are uniquely defined.

198 Form Symmetries and Reduction of Order
Specifically, if xn−j = ρei(θ+2πm) for all integer values of m then the modulusof the power
|xaj
n−j| = ρaj = |xn−j|aj
does not depend on m. Further, since
|xn+1| = |γn||xn|a0 |xn−1|a1 · · · |xn−k+1|ak−1 (6.95)
it follows that the moduli of terms |xn| in each solution of (6.93) in C0 yielda solution of the real difference equation (6.95) in (0,∞). Now, if we define
yn = ln |xn|, δn = ln |γn|
then every solution of (6.95) is of the form {eyn} where {yn} is a solution of(6.94). Since the exponential function defines a conjugate mapping betweenthe solutions of equations (6.94) and (6.95) we call (6.94) the linear conjugateof (6.95). It follows that solutions of (6.94) yield important information aboutthe moduli of terms in a general solution of (6.93) in C0; in particular, bytracking the variations in modulus it is possible to determine which solutionsof (6.93) are bounded without converging to zero.
Let us call a solution {xn} of (6.93) interesting if it is bounded and staysaway from zero; i.e., if there are real numbers r1, r2 such that
0 < r1 ≤ |xn| ≤ r2 <∞. (6.96)
We also call (x0, x−1, . . . , x−k+1) ∈ Ck0 an interesting initial point if the
corresponding solution of (6.93) is an interesting solution, and define the in-teresting set I0 ⊂ Ck
0 of (6.93) to be the collection of all initial points of (6.93).The set I0 may be empty as in the case
xn+1 = γnxαn where 0 < |α| ≤ 1 and |γn| ≤ ρ < 1. (6.97)
In this case, |xn| ≤ ρn|x0|αn
so xn → 0 as n→ ∞ regardless of the choice ofinitial value x0. On the other hand, if {γn} is any sequence in the unit circleT (i.e., γn = eiθn where {θn} is an arbitrary sequence of real numbers) thenby choosing all initial values x−j ∈ T for 0 ≤ j ≤ k − 1 we see from (6.95)that T is invariant. Therefore,
γn ∈ T for all n⇒ Tk ⊂ I0.
We examine the interesting sets for a special case of (6.93) with order two;i.e., the second-order difference equation
xn+1 = γnxαnx
βn−1, γn ∈ T, n ≥ 0 (6.98)
whereα, β ∈ R, β 6= 0, x−1, x0 ∈ C0.

Type-(1,k) Reductions 199
The linear conjugate of the modulus equation of (6.98) is
yn+1 = αyn + βyn−1 (6.99)
which has eigenvalues
λ± =α±
√α2 + 4β
2.
A number of different cases occur depending on the values of λ±.
Case 1: |λ−|, |λ+| > 1. In this case all nonzero real solutions of (6.99) haveunbounded magnitude; i.e., limn→∞ |yn| = ∞. It follows that |xn| = eyn doesnot statisfy (6.96) and therefore, the only interesting solutions are the oneswithin the unit circle T. Thus
I0 = T × T. (6.100)
This also shows that the unit circle T is repelling since every uninterestingsolution has a subsequence that approaches either 0 or ∞. Ranges of valuesfor α, β that imply this case are easy to obtain from the above formula forλ±. In particular, (6.100) is true with
α > 0 and β > α+ 1 ⇒ λ− < −1 and λ+ > 1
for real eigenvalues. If the eigenvalues are complex with α2 < −4β (or |α| <2√−β) then (6.100) holds if and only if
β < −1 and α2 < −4β ⇒ |λ−| = |λ+| =√−β > 1.
Case 2: |λ−|, |λ+| < 1. This is the opposite extreme of Case 1 since in thiscase all real solutions of (6.99) converge to zero. Hence limn→∞ |xn| = e0 = 1and we conclude that all solutions of (6.98) C0 in converge to the unit circleT. In particular, all solutions of (6.98) in C0 are interesting; i.e,
I0 = C0×C0. (6.101)
For complex eigenvalues, (6.101) holds if and only if
−1 < β < 0 and α2 < −4β.
For real eigenvalues, it is not hard to verify that (6.101) holds if
|α| < 2 and − 1 < β < 1 − |α|.
It is worth noting that neither of the above conditions hold if α, β areintegers with β 6= 0.
Case 3. |λ−| ≤ 1 ≤ |λ+| or |λ+| ≤ 1 ≤ |λ−|. In this case the solutions of(6.98) are neither universally attracted to the unit circle T as in Case 2 nor

200 Form Symmetries and Reduction of Order
universally repelled by it as in Case 1. The interesting solutions are mixedwith generic solutions that have 0 or ∞ as their limit points. Therefore, thereis a less predictable (hence, more appealing) range of possibilities. Let usexplore some of these possibilities next.
For real eigenvalues the following range is complementary to that stated inCase 1:
α > 0 and 0 < β ≤ α+ 1 ⇒ −1 ≤ λ− < 0, λ+ > 1
with λ− = −1 if and only if β = α+1. When all inequalities above are strict,the interesting initial values are those which result in a zero coefficient for thedominant eigenvalue λ+. From the formula
yn = c1λn+ + c2λ
n−
we obtainy−1 =
c1λ+
+c2λ−
, y0 = c1 + c2 (6.102)
which yield
c1
(1
λ+− 1
λ−
)= y−1 −
y0λ−
.
Thus c1 = 0 if and only if
y0 = y−1λ− ⇔ ey0 = eλ− ln |x−1| ⇔ |x0| = |x−1|λ− .
From this we conclude that if α > 0 and 0 < β < α+ 1 then
I0 ={(x0, x−1) : |x0| = |x−1|λ−
}.
Further, with these initial values
limn→∞
|xn| = limn→∞
eyn = limn→∞
ec2λn− = 1.
It follows that all interesting solutions of (6.98) in this case converge to theunit circle T; i.e., if α > 0 and 0 < β < α + 1 then for every x−1 ∈ C0 andeach x0 on the circle |z| = |x−1|λ− , the solution that is generated is interestingand converges to an orbit in T. No other solutions of (6.98) are interesting orattracted to T, a situations that is markedly different from both Cases 1 and2. As a specific example, the quadratic difference equation
xn+1 = xnxn−1
that we encountered earlier in Section 2.2 in this book. This equation gener-ates uniquely defined trajectories in C due to its integer exponents and has anontrivial interesting set
I0 ={(x0, x−1) : |x0| = |x−1|1−γ
}, where γ =
√5 + 1
2(the golden mean).

Type-(1,k) Reductions 201
In the boundary case β = α+1, λ− = −1 and λ+ = α+1 so (x0, x−1) ∈ I0if and only if |x0| = |x−1|−1. Further, from (6.102) we obtain
c2 =
(y−1 −
y0λ+
)/
(1
λ−− 1
λ+
)=y0 − y−1(α+ 1)
α+ 2=
1
α+ 2ln
( |x0||x−1|α+1
).
Therefore
|xn| = eyn = ec2(−1)n
=
( |x0||x−1|α+1
)(−1)n/(α+2)
= |x−1|(−1)n+1
.
Evidently, for each given x−1 ∈ C0, an interesting solution {xn} jumpsbetween the circle of radius |x−1|−1 and the circle of radius |x−1| dependingon whether n is even or odd. Therefore, the unit circle T neither attracts norrepels the interesting solutions in this case.
Finally, the eigenvalues are complex only when
|λ−| = |λ+| = 1 with β = −1 and |α| < 2.
Solutions of (6.99) are as follows
yn = c1 cosnθ + c2 sinnθ, cos θ =α
2, sin θ =
√1 −
(α2
)2
where c1, c2 are functions of the initial values y0 = |x0| and y−1 = |x−1|.Hence,
|xn| = ec1 cosnθ+c2 sin nθ
It is clear that the modulus of every solution is almost periodic (or quasi-periodic) in this case, leading to a similar behavior for the actual solution inthe complex plane. Figures 6.1 and 6.2 show plots of solutions of
xn+1 =γn
√xn
xn−1
where α = 1/2. The plotted points represent principal values only (argumentindex zero). We emphasize that these are base-space plots in the complexplane C, not state-space orbits in C2.
If θ is a rational multiple of π then the modulus sequence is periodic; forexample, if α = 1 then θ = π/3 and the modulus sequence is periodic withperiod 6. The difference equation in this case is
xn+1 =γnxn
xn−1
which we also encountered in Section 2.3. Exploration of additional cases of(6.98) that are not considered above (including a consideration of γn that isnot in T) is left to the reader, who may also wish to consider studying thesolutions of (6.93) with order 3 or greater in the complex plane.

202 Form Symmetries and Reduction of Order
FIGURE 6.1
Plots of interesting solutions of Eq. (6.98) in the base-space C with α = 1/2,β = −1, x−1 = i, x0 = 0.7i and: (a) γn = 1; (b) γn = exp(nπi/1.1).
FIGURE 6.2
Plots of interesting solutions of Eq. (6.98) in the base-space C with α = 1/2,β = −1, x−1 = i, x0 = 0.7i and: (a) γn = exp(nπi/1.2), (b)
γn = exp(nπi/2).

Type-(1,k) Reductions 203
6.3.5 Biology: Modeling populations
This section applies some of the results obtained in previous sections to studythe positive solutions of certain expow equations. We discuss the asymptoticbehaviors of solutions in two examples below where direct analysis (withoutorder reduction) is more difficult.
The equation discussed in the next example appears in a discrete-time pop-ulation model (see the Notes for this chapter for references). This exampleillustrates that solutions of Eq. (6.80) may exhibit a wide variety of coexist-ing, qualitatively different behaviors even in an applied context. Since thesesolutions are also stable, the equation discussed below is an example of amultistable equation.
Example 6.8
Consider the autonomous expow difference equation
xn+1 = xn−1ea−xn−xn−1 , a, x−1, x0 > 0. (6.103)
It is easy to check that Eq. (6.103) has up to two isolated fixed points.One is the origin, which is repelling if a > 0 (eigenvalues of linearization are±ea/2) and the other fixed point is x = a/2. If a > 4 then x is unstable andnonhyperbolic because the eigenvalues of the linearization of (6.103) are −1and 1−a/2. The computer-generated diagram in Figure 6.3 shows the varietyof stable periodic and nonperiodic solutions that occur with a = 4.6 and oneinitial value x−1 = 2.3 fixed and the other initial value x0 changing from 2.3to 4.8; i.e., approaching (or moving away from) the fixed point x on a straightline segment in the plane.
In Figure 6.3, for every grid value of x0 in the range 2.3–4.8, the last 200(of 300) points of the solution {xn} are plotted vertically. In this figure,stable solutions with periods 2, 4, 8, 12, and 16 can be easily identified. Allof the solutions that appear in Figure 6.3 represent coexisting stable orbitsof Eq. (6.103). There are also periodic and nonperiodic solutions whichdo not appear in Figure 6.3 because they are unstable (e.g., the fixed pointx = 2.3). Additional bifurcations of both periodic and nonperiodic solutionsoccur outside the range 2.3–4.8 which are not shown in Figure 6.3.
Understanding the behavior for solutions of Eq. (6.103) is made easierwhen we look at its SC factorization as given by Corollary 6.3. Here a0 = 0,a1 = 1 and b0 = b1 = b. With these parameter values it is readily verified thatcondition (6.79) is satisfied and c = −1. Thus
tn+1 =ea
tn, t0 =
x0
x−1e−x−1(6.104)
xn+1 = tn+1xne−xn . (6.105)

204 Form Symmetries and Reduction of Order
FIGURE 6.3
Bifurcations of solutions of Eq. (6.103) with a changing initial value; a = 4.6is fixed.

Type-(1,k) Reductions 205
FIGURE 6.4
Two of the orbits in Figure 6.3 shown here on their loci of two curves ξ1, ξ2in the state-space.
All solutions of (6.104) with t0 6= ea/2 are periodic with period 2:{t0,
ea
t0
}=
{x0
x−1e−x−1,x−1e
a−x−1
x0
}.
Hence the orbit of each nontrivial solution {xn} of (6.103) in the plane isrestricted to the pair of curves
ξ1(t) =ea
t0te−t and ξ2(t) = t0te
−t. (6.106)
Now, if x−1 is fixed and x0 changes, then t0 changes proportionately tox0. These changes in initial values are reflected as changes in parameters in(6.105). The orbits of the one dimensional map bte−t where b = t0 or ea/t0exhibit a variety of behaviors as the parameter b changes according to well-known rules such as the fundamental ordering of cycles and the occurrenceof chaotic behavior with the appearance of period-3 orbits when b is largeenough. Eq. (6.105) splits these behaviors evenly over the pair of curves(6.106) as the initial value x0 changes; see Figure 6.4, which shows the orbitsof (6.103) for two different initial values x0 with a = 4.6; the first 100 pointsof each orbit are discarded in these images so as to highlight the asymptoticbehavior of each orbit. The splitting over the pair of curves ξ1, ξ2 also explainswhy odd periods do not appear in Figure 6.3.
The next example examines a slightly modified version of Eq. (6.103) thatnevertheless shows a markedly different behavior. The semiconjugate fac-

206 Form Symmetries and Reduction of Order
torization makes transparent the root causes of this substantial change inbehavior that might be difficult to explain otherwise.
Example 6.9
By way of comparison with Eq. (6.103) consider the following expow equation
xn+1 = xn−1ea+bxn−bxn−1 , a ∈ R, b > 0 (6.107)
which is similar to (6.103) except for a sign change in the exponent. ByCorollary 6.4, Eq. (6.107) reduces to the first-order equation:
yn+1 =t0yne(n+1)a+byn , t0 = x0x−1e
−bx−1 . (6.108)
Since t0 and y0 = x0 are positive, if a > 0 then evidently each solution of(6.108) is unbounded. If a = 0 then because the function ebu/u is unimodalwith a single minimum, the equation
yn+1 =t0ynebyn =
x0x−1ebyn−bx−1
yn(6.109)
has two, one, or no fixed points depending on how large the initial value t0 is;in particular, for sufficiently small values of t0 there are two fixed points.
This bifurcation is not so transparent in a direct examination of the second-order equation (6.107) but it has a significant effect on the asymptotic behav-iors of the solutions of that equation because the appearance of the fixed pointin (6.109) yields bounded solutions for Eq. (6.107) when a = 0. In this case,using straightforward analysis it is possible to determine the regions of initialpoints (x−1, x0) in the Euclidean plane that imply the occurrence of a partic-ular aysmptotic behavior. In all cases, solutions are either unbounded or theyconverge to a positive fixed point. Finally, if a < 0 then we may in additionhave convergence to zero. In no case are the complex behaviors exhibited bythe solutions of Eq. (6.103) observed.
Next we consider a more general, nonautonomous version of (6.103) withα replaced by a periodic sequence αn. We first present a lemma to facilitatethe discussion of the nonautonomous equation below.
LEMMA 6.2
Let {σn} be a periodic sequence of positive numbers with minimal period p ≥ 1and let {tn} be a solution of the difference equation
tn+1 =σn
tn(6.110)
for a given initial value t0 > 0. Then the following are true:

Type-(1,k) Reductions 207
(a) If p is odd then {tn} is periodic with period 2p (not necessarily minimal).(b) If p is even and
σ0σ2 · · ·σp−2 = σ1σ3 · · ·σp−1 (6.111)
then {tn} is periodic with period p.(c) If p is even but (6.111) does not hold then {tn} has a subsequence that
decreases to zero and another subsequence that increases to infinity.
PROOF (a) Using straightforward induction we find that
tn =t0σ1σ3 · · ·σn−3σn−1
σ0σ2 · · ·σn−4σn−2, if n is even and: (6.112)
tn =σ0σ2 · · ·σn−3σn−1
t0σ1σ3 · · ·σn−4σn−2, if n is odd. (6.113)
If p = 2q + 1 is odd then
σ2q+1+j = σj for j = 0, 1, . . . , 2q. (6.114)
Further, t2p = t4q+2 has even index so by (6.112)
t2p =t0σ1σ3 · · ·σ2q−3σ2q−1σ2q+1σ2q+3 · · ·σ4q−1σ4q+1
σ0σ2 · · ·σ2q−2σ2qσ2q+2σ2q+4 · · ·σ4q−2σ4q
= t0
(σ1σ3 · · ·σ2q−3σ2q−1
σ2q+2σ2q+4 · · ·σ4q−2σ4q
)(σ2q+1σ2q+3 · · ·σ4q−1σ4q+1
σ0σ2 · · ·σ2q−2σ2q
)(6.115)
= t0
where the last equality holds because each of the two ratios in (6.115) equals1 by (6.114). It follows that {tn} has period 2p. This may not be a primeperiod; for example, if σj = σ for j = 0, 1, . . . , p − 2 where σ > 0 and σ 6= 1and if also σp−1 = t0 = 1 then by (6.113)
tp =σ0σ2 · · ·σp−3σp−1
t0σ1σ3 · · ·σp−4σp−2=σ(p−1)/2
σ(p−1)/2= 1 = t0
i.e., {tn} has period p.(b) Suppose that p is even. Then again by (6.112)
tp = t0σ1σ3 · · ·σp−3σp−1
σ0σ2 · · ·σp−4σp−2= t0
where the last equality is true by (6.111).(c) If p is even then as in Part (b)
tp = t0σ1σ3 · · ·σp−3σp−1
σ0σ2 · · ·σp−4σp−2. (6.116)

208 Form Symmetries and Reduction of Order
Since σ has even period p, by (6.112)
t2p = t0
(σ1σ3 · · ·σp−3σp−1
σ0σ2 · · ·σp−4σp−2
)(σp+1σp+3 · · ·σ2p−3σ2p−1
σpσp+2 · · ·σ2p−4σ2p−2
)
= t0
(σ1σ3 · · ·σp−3σp−1
σ0σ2 · · ·σp−4σp−2
)2
.
Inductively, we see that
tmp = t0
(σ1σ3 · · ·σp−3σp−1
σ0σ2 · · ·σp−4σp−2
)m
. (6.117)
If (6.111) does not hold then the ratio inside the parentheses in (6.117) iseither greater than one or less than one. If greater than one then tmp → ∞monotonically as m→ ∞ and
tmp+1 =σmp
tmp=
σ0
tmp→ 0.
Similarly, if the ratio in (6.117) is less than one then tmp → 0 and tmp+1 →∞ monotonically as m→ ∞. Thus the proof of (c) is complete.
Example 6.10
Consider the expow equation
xn+1 = xn−1eαn−bxn−bxn−1 , x0, x−1, b > 0 (6.118)
where αn is a periodic sequence of real numbers with minimal or prime periodp ≥ 1. By Corollary 6.6 with k = m = 1 this equation reduces in order to
yn+1 = tn+1yne−byn , where tn+1 =
eαn
tn.
If p is either odd or it is even and satisfies (6.111) then by Lemma 6.2 thesolution {tn} of the factor equation above is periodic with period p or 2p. Afull cycle of {tn} consists of q distinct points where q ≤ 2p. It follows thateach orbit of (6.118) is confined to q distinct curves of type
ξi(u) = tiue−bu
in the plane where the ti are the distinct values of tn. For sufficiently largevalues of αn some of the mappings ξi are chaotic (due to their having a period3 solution or a snap-back repeller. Thus the collection of points (yn−1, yn) oneach curve ξi tends to be densely distributed on a segment of ξi. These densepatches are visibly highlighted in a numerically generated plot of the orbit of(6.118) in its state-space (or “phase plane”). Figure 6.5 depicts this situationfor (6.118) with b = 1 and
αn = 5 + 0.6 sinπn
3

Type-(1,k) Reductions 209
FIGURE 6.5
A nonperiodic phase plane orbit of Eq. (6.118) with periodic αn.
which has period 6. Thus eαn also has period 6 and further, it satisfies (6.111)with
eα1eα3eα5 = eα2eα4eα6 = 3269017.37.
The sequence {tn} has only 4 distinct points per cycle:
n 1 2 3 4 5 6tn 8.16 30.6 8.16 18.2 4.85 18.2
so that we observe patches on only four distinct curves in Figure 6.5. We notethat these patches are not continuous curves but made of 20000 tightly packedpoints. Clearly this is not a periodic orbit for Eq. (6.118). For smaller valuesof αn for which the mappings ξi have periodic points, numerical simulationsshow that the solutions of (6.118) are also periodic; these periods must beinteger multiples of p by the preceding argument.
If p is even but (6.111) is not satisfied then the unbounded subsequencesof {tn} cause a spread of points in the orbit of (6.118) since now there are aninfinite number of curves like the ξi above. Figure 6.6 shows a numericallygenerated orbit of this type where the sequence
αn = ln(120 + 20 sin
πn
4
)
has period 8 with
eα1eα3eα5eα7 = 201640000, eα2eα4eα6eα8 = 201600000.

210 Form Symmetries and Reduction of Order
FIGURE 6.6
A phase plane orbit of Eq. (6.118) with αn still periodic.
The planar orbit in Figure 6.6 is a plot of 60000 points (b = 1). As morepoints are generated numerically and plotted, the peak of the cone will risewithout bound since the sequence {tn} is unbounded.
Our study of expow equations above points to a large variety of equationswith semiconjugate factorizations and thus, reducible in order. We have alsoshown that such equations are capable of generating rich dynamic behaviors.Further, the behaviors of positive solutions in the last two examples abovemight be difficult to explain without the reduction of order that results fromthe semiconjugate factorization. On the other hand, the interested readerwill have noticed that many types of expow equations that are amenableto analysis using Lemma 6.2 and Theorem 6.3 have not been considered inthis first study. Some of those equations and the behaviors of their solutionson various subgroups of C0 (e.g., (0,∞) or the circle group T) can providesignificant challenges and rewards in the future studies of expow equations.
Finally, many expow equations do not satisfy identity (6.52) and there-fore, the above discussion is not applicable to such equations. Whether theselatter types of expow equations possess form symmetries and semiconjugatefactorizations of a different kind remains an open question.

Type-(1,k) Reductions 211
6.4 Notes
Much of the material in this section is taken from Sedaghat (2008, 2009d,2009e, 2010c). The biological model in Example 6.8 is from Franke et al.(1999). Separable rational difference equations and their applications are dis-cussed in Philos et al. (1994), DeVault et al. (1998), El-Metwally et al. (2001),Grove and Ladas (2005), and Chan et al. (2005). These references establishimportant facts about convergence and periodic character of solutions of sep-arable rational equations of order greater than one. Example 6.4 confirmsthat this class of equations contains members with complicated aperiodic andchaotic solutions.
The reader may have noticed the similarity between several results appear-ing in Sections 5.6 and 6.3. Specifically, Theorem 5.6 together with Corollary5.8, Lemma 5.6 and the Proposition following it in Section 5.6 may be com-pared to Theorem 6.3 in Section 6.3. Further, Corollaries 5.9 and 5.10 inSection 5.6 may be compared to Corollaries 6.3 and 6.7 in Section 6.3. Thissimilarity is striking, considering the different classes to which the equationsinvolved belong and the different methods by which each set of results are de-rived. This suggests a possibly deep connection between the two sets of resultsand therefore, also between the two different factorization types. Exploringthis issue is left to future work on this topic.
6.5 Problems
6.1 This problem generalizes Corollary 6.1(b). Let F be a nontrivial field andconsider the difference equation
xn+1 = αn + axn + bψ(xn−i) + ψ(xn−k) (6.119)
where 0 ≤ i < k, a, b, αn ∈ F for all n ≥ 0 and ψ : F → F is a given function.(a) Show that Eq. (6.119) has the separable form symmetry (6.8) if
ak−ib+ 1 = 0, or b = −a−k+i, for i ≥ 0. (6.120)
Use Theorem 6.1 as in Example 6.2.(b) If (6.120) holds then show that the SC factorization of (6.119) is
tn+1 = αn + atn, t0 = x0 +
k∑
j=1
a−k+j−1ψ(x−j)
xn+1 = tn+1 −k∑
j=1
a−k+j−1ψ(xn−j+1).

212 Form Symmetries and Reduction of Order
Note that the SC factorization is the same for all i < k.
6.2 Consider the following special case of Eq. (6.119):
xn+1 = xn − ψ(xn−i) + ψ(xn−k). (6.121)
(a) Verify that Eq. (6.121) has a separable form symmetry and find its SCfactorization.
(b) Show that for each set of initial values x0, x−1, . . . , x−k the correspond-ing solution of (6.121) is the same as the solution of the cofactor equation
xn+1 = t0 −k∑
j=1
ψ(xn−j+1)
with initial values x0, x−1, . . . , x−k+1 and
t0 = x0 +
k∑
j=1
ψ(x−j+1).
(c) Let β 6= 0 in F =R and define
ψ(u) = −βu.
If k = 1 then determine the asymptotic behavior of solutions of
xn+1 = xn +β
xn− β
xn−1
using the corresponding solutions of the first-order equation
xn+1 = t0 +β
xn.
(d) If β > 0 and t0 = x0 −∑k
j=1(β/x−j) > 0 and x−j > 0 for j = 1, . . . , kthen find the asymptotic behavior of solutions of
xn+1 = xn +β
xn−i− β
xn−k
for arbitrary i < k using the asymptotic behaviors of the corresponding solu-tions of
xn+1 = t0 +
k∑
j=1
β
xn−j+1.
It can be shown (Philos et al. 1994) that every positive solution of theabove equation converges to its unique positive fixed point
L =t0 +
√t20 + 4kβ
2.

Type-(1,k) Reductions 213
6.3 (a) Show that the following special case of Eq. (6.119)
xn+1 = αn + 2xn + ψ(xn−k+1) + ψ(xn−k) (6.122)
has a separable form symmetry in the finite field F =Z3 and find its SCfactorization.
(b) Find a value of the time index i so that
xn+1 = αn + 2xn + ψ(xn−i) + ψ(xn−k)
has a SC factorization in Z5.
6.4 Give the details of the proof of Corollary 6.2.
6.5 (a) Find the SC factorizations of the following equations over C\{0}
(i) xn+1 =αnxn
xn−1, (ii) xn+1 =
αnxn−1
xn.
(b) Let αn = α be a nonzero constant. Show that every solution of Equation(i) in (a) is periodic with period 6 in C\{0} either by using Equation (i)directly or by using its SC factorization. What can be said about Equation(ii) with constant αn?
6.6 (a) Prove that the group
Ga = {an : n ∈ Z, a 6= 0, 1}
is invariant under the difference equation
xn+1 = αxm0
n xm1
n−1 · · ·xmk
n−k where:
mj ∈ Z for j = 0, . . . , k, and α, x0, . . . , x−k ∈ Ga.
(b) Study the behavior of solutions of xn+1 = xnxn−1 in Ga for (i) a = 2,(ii) a = i and (iii) a = ei.
6.7 Prove that the group
Cr = {z : Re z, Im z ∈ Q, z 6= 0}
is invariant under rational equations with coefficients and initial values in Cr
(as long as the denominator is not equal to zero).
6.8 Find the SC factorizations of equations (6.65) and (6.66).
6.9 Let ψ be as defined in Example 6.6. For every positive integer k showthat the difference equation
xn+1 = αnψ(xn)ψ(xn−2k+1)xn−2k+1
has a SC factorization and determine this factorization. Note that this equa-tion generalizes Eq. (6.64).

214 Form Symmetries and Reduction of Order
6.10 Prove Lemma 6.1.
6.11 Give the details of the proof of Theorem 6.3(a).
6.12 Consider the second-order difference equation
xn+1 =αnxn−1
(axn + b)(cxn−1 + d)(6.123)
where a, b, c, d ∈ C\{0} and αn is a sequence of nonzero complex numbers.(a) If ad = bc then show that (6.123) has the following SC factorization
tn+1 =αn
tn,
xn+1 =tn+1xn
cxn + d.
(b) Let a, b, c, d > 0 with ad = bc and assume that αn is a periodic sequenceof positive real numbers with period p ≥ 1. Use the SC factorization in (a) todetermine possible types of solutions for (6.123).
6.13 Consider the third-order difference equation
xn+1 =αnxn−1(axn + b)
cxn−2 + d(6.124)
where we assume that a, b, c, d ∈ C\{0} and αn is a sequence of nonzero com-plex numbers. If ad = bc then show that Eq. (6.124) has a SC factorizationand determine the factor and cofactor equations in this case.
6.14 Supply the details involving the polynomial Q1 in the proof of Corollary6.3.
6.15 Complete the proof of Corollary 6.4.
6.16 Consider the third-order expow equation
xn+1 = x1−an xa
n−1eαn−b0xn−b1xn−1−b2xn−2 , a ≥ 0, b0, b1, b2, αn ∈ R.
(6.125)(a) Let a = 0. Show that Eq. (6.125) has an SC factorization over the
multiplicative group (0,∞) for some values of b0, b1, b2. Determine this SCfactorization and the corresponding constraint on b0, b1, b2.
(b) Let a > 0. Show that Eq. (6.125) has two SC factorizations overthe multiplicative group (0,∞) depending on the possible values of b0, b1, b2.Determine each of these factorizations and the corresponding constraints onb0, b1, b2. Further, show that each of the two cofactor equations has an SCfactorization and determine constraints on b0, b1, b2 that correspond to eachfactorization. For these values of b0, b1, b2 find the complete SC factorizationof (6.125) into a triangular system of first-order equations.

Type-(1,k) Reductions 215
(c) Use the results in Part (b) to obtain a complete SC factorization of
xn+1 =√xnxn−1e
−xn+0.5xn−1+0.5xn−2 (6.126)
into a triangular system of first-order equations. Use this system to discussthe global behavior of the positive solutions of Eq. (6.126).
(d) Repeat Part (c) for the equation
xn+1 =√xnxn−1e
xn−0.5xn−1−0.5xn−2.
6.17 Show that the third-order expow equation
xn+1 = xn−2eαn−bxn−bxn−1−bxn−2 , b, αn ∈ R, b 6= 0.
has an SC factorization of the type mentioned in Corollary 6.3 over the com-plex numbers C but not over R. Determine this SC factorization.
6.18 Consider the following delay expow equation
xn+1 = xn−2eαn−b0xn−bkxn−k , k ≥ 1 (6.127)
which may be compared with Eq. (6.82) in Corollary 6.4.(a) Show that if b0 + bk = 0 then Eq. (6.127) has a SC factorization
tn+1 = eαn tn,
xn+1 = tn+1x−1n x−1
n−1e−b0xn−b0xn−1−···−b0xn−k+1 . (6.128)
(b) If k = 3m with m ≥ 1 then show that the cofactor equation (6.128) hasa SC factorization over C as
rn+1 = tn+1rcn, c =
−1 + i√
3
2,
xn+1 = rn+1xcne
−b0(xn−cxn−1+xn−3−cxn−4+···+xn−k+3−cxn−k+2).
where c = (−1 − i√
3)/2 is the complex conjugate of c.(c) Suggest a generalization of the above process for the expow equation
xn+1 = xn−jeαn−b0xn−bkxn−k , j, k ≥ 1.
6.19 Consider the powers-only expow equation
xn+1 = xαnx
βn−1, α, β ∈ R, β 6= 0. (6.129)
(a) Show that Eq. (6.129) has a semiconjugate factorization
tn+1 = tpn, t0 = x0xq−1
xn+1 = tn+1x−qn
for suitable values of the parameters p and q (see Section 6.3.4).(b) Verify that p, q ∈ R if and only if α2 +4β ≥ 0. In this case the solutions
of the SC factorization in Part (a) have single-valued moduli.(c) If α2 + 4β ≥ 0 then find an explicit formula for the solutions of (6.129)
by solving the first order equations in the SC factorization in (a).

This page intentionally left blankThis page intentionally left blank

7
Time-Dependent Form Symmetries
To simplify our initial exposition to semiconjugate factorization, it was as-sumed in Chapter 3 that the form symmetry H was independent of n. Nowthat the basic ideas and results are in place, we are ready to extend theconcept of semiconjugate factorization to all nonautonomous difference equa-tions by considering form symmetries that are functions of the “independentvariable” n (viewed intuitively as a discrete “time” variable). Much of thedevelopment in this chapter consists of direct extensions of the basic resultsin Chapters 3 and 5. In particular, we extend the SC factorization Theorem3.1 and the useful invertible-map criterion Theorem 5.1 in Section 5.1. Asmight be expected, some new facts and features emerge in this more generalsetting. For instance, these extensions generalize the results in Chapter 5 ontype-(k, 1) order reductions to include SC factorizations of linear equationswith variable coefficients. In the case of linear difference equations, our re-sults uncover new, previously unknown features that make up the structureand define the essential properties of these difference equations.
7.1 The semiconjugate relation and factorization
Let G be a nontrivial group and let Fn be the unfolding on Gk+1 of thefunction fn in the difference equation
xn+1 = fn(xn, . . . , xn−k) (7.1)
for each n. Then (7.1) is equivalent to
Xn+1 = Fn(Xn), Xn = (xn, . . . , xn−k). (7.2)
As in Chapter 3, we are interested in a lower dimensional factor equation
Yn+1 = Φn(Yn), Yn = (yn, . . . , yn−m+1), m ≤ k (7.3)
corresponding to (7.2). If there exists a sequence of maps Hn : Gk+1 → Gm
such that for every solution {Xn} of (7.2) the sequence
Yn = Hn(Xn), n = 0, 1, 2, . . . (7.4)
217

218 Form Symmetries and Reduction of Order
is a solution of (7.3) then
Φn(Hn(Xn)) = Φn(Yn) = Yn+1 = Hn+1(Xn+1) = Hn+1(Fn(Xn)).
Therefore, (7.4) is satisfied for all solutions of (7.2) and (7.3) if and only ifthe sequence {Hn} of maps satisfies the following equality for all n
Hn+1 ◦ Fn = Φn ◦Hn. (7.5)
This semiconjugate relation is illustrated by the diagram
Gk+1 Fn−→ Fn(Gk+1)↓Hn
↓Hn+1
Hn(Gk+1) = Gm Φn−→ Φn(Hn(Gk+1)) = Hn+1(Fn(Gk+1))
If the mappings Hn are independent of n, i.e., Hn = H for all n thenEq. (7.5) reduces to Eq. (3.5) in Section 3.1.5. This leads to the followingdefinition in which it is convenient to think of n as a discrete “time” index.
DEFINITION 7.1 Let k ≥ 1, 1 ≤ m ≤ k and G be a nontrivial group. Ifthere is a sequence of surjective maps Hn : Gk+1 → Gm such that Eq. (7.5)is satisfied for a given pair of function sequences {Fn} and {Φn} then we saythat Fn is semiconjugate to Φn for each n and refer to the sequence {Hn}as a time-dependent form symmetry for Eq. (7.2) or equivalently, forEq. (7.1). Since m < k + 1, the form symmetry {Hn} is order-reducing.
Technically, a time-dependent form symmetry can also be defined as a singlemap
H : N ×Gk+1 → Gm, H(n; u0, . . . , uk) = Hn(u0, . . . , uk).
We choose the sequence definition due to its more intuitive content and inkeeping with our practice in this book where difference equations are definedin terms of map sequences on groups, as in (7.1).
Considerations similar to those in Section 3.1.5 lead to the following theoremthat generalizes Theorem 3.1 and makes precise the concept of semiconjugatefactorization of difference equations. For the notation that is common to thenext theorem and Theorem 3.1, see Section 3.1.5.
THEOREM 7.1
Let k ≥ 1, 1 ≤ m ≤ k, let hn : Gk−m+1 → G for n ≥ −m + 1 be asequence of functions on a given nontrivial group G and define the functionsHn : Gk+1 → Gm by
Hn(u0, . . . , uk) = [u0 ∗ hn(u1, . . . , uk+1−m), . . . , um−1 ∗ hn−m+1(um, . . . , uk)].(7.6)

Time-Dependent Form Symmetries 219
Then the following statements are true:(a) For each n ≥ 0, the function Hn defined by (7.6) is surjective.(b) If {Hn} is an order-reducing form symmetry then the difference equation
(7.1) has an equivalent SC factorization consisting of the system of factor-cofactor equations
tn+1 = gn(tn, . . . , tn−m+1), (7.7)
xn+1 = tn+1 ∗ hn+1(xn, . . . , xn−k+m)−1 (7.8)
whose orders m and k + 1 −m, respectively, add up to the order of (7.1).(c) The SC factor map Φn : Gm → Gm in (7.5) is the unfolding of Eq.
(7.7) for each n ≥ 0. In particular, each Φn is of scalar type.
PROOF (a) Let n be a fixed nonnegative integer and for j = 0, . . . , m−1denote the j-th coordinate function of Hn by
η j+1(u0, . . . , uk) = uj ∗ hn−j(uj+1, . . . , uj+k+1−m). (7.9)
Now choose an arbitrary point (v1, . . . , vm) ∈ Gm and define
um−1 = vm ∗ hn−m+1(um, um+1 . . . , uk)−1, (7.10)
um = um+1 = . . . uk = u
where u is a fixed element of G, e.g., the identity. Then
vm = um−1 ∗ hn−m+1(u, u . . . , u)
= um−1 ∗ hn−m+1(um, um+1 . . . , uk)
= ηm(u0, . . . , uk)
= ηm(u0, . . . , um−2, vm ∗ hn−m+1(u, u . . . , u)−1
︸ ︷︷ ︸um−1
, u . . . , u)
for any selection of elements u0, . . . , um−2 ∈ G. Using the same idea, define
um−2 = vm−1 ∗ hn−m+2(um−1, u . . . , u)−1
with um−1 defined by (7.10) so as to get
vm−1 = um−2 ∗ hn−m+2(um−1, u . . . , u)
= um−2 ∗ hn−m+2(um−1, um . . . , uk−1)
= ηm−1(u0, . . . , uk)
= ηm−1(u0, . . . , um−3, vm−1 ∗ hn−m+2(um−1, u . . . , u)−1
︸ ︷︷ ︸um−2
, um−1, u . . . , u)

220 Form Symmetries and Reduction of Order
for any choice of u0, . . . , um−3 ∈ G. Continuing in this way, by induction weobtain elements um−1, . . . , u0 ∈ G such that
vi = ηi(u0, . . . , um−1, u . . . , u), i = 1, . . . , m.
Therefore, Hn(u0, . . . , um−1, u . . . , u) = (v1, . . . , vm) and it follows that Hn isonto Gm.
(b) To show that the SC factorization system consisting of equations (7.7)and (7.8) is equivalent to Eq. (7.1) we show that (i) each solution {xn} of (7.1)uniquely generates a solution of the system (7.7) and (7.8) and, conversely, (ii)each solution {(tn, yn)} of the system (7.7) and (7.8) correseponds uniquelyto a solution {xn} of (7.1). To establish (i) let {xn} be the unique solution of(7.1) corresponding to a given set of initial values x0, . . . x−k ∈ G. Define thesequence
tn = xn ∗ hn(xn−1, . . . , xn−k+m−1) (7.11)
for n ≥ −m+ 1. Then for each n ≥ 0 if Hn is defined by (7.6) it follows fromthe semiconjugate relation (7.5) that
xn+1 = fn(xn, . . . , xn−k)
= gn(xn ∗ hn(xn−1, . . . , xn−k+m−1), . . . ,
xn−m+1 ∗ hn−m+1(xn−m, . . . , xn−k)) ∗ [hn+1(xn, . . . , xn−k+m)]−1
= gn(tn, . . . , tn−m+1) ∗ [hn+1(xn, . . . , xn−k+m)]−1.
Therefore, gn(tn, . . . , tn−m+1) = xn+1 ∗ hn+1(xn, . . . , xn−k+m) = tn+1 sothat {tn} is the unique solution of the factor equation (7.7) with initial values
t−j = x−j ∗ h−j(x−j−1, . . . , x−j−k+m−1), j = 0, . . . , m− 1.
Further, since xn+1 = tn+1 ∗ [hn+1(xn, . . . , xn−k+m)]−1 for n ≥ 0 by (7.11),{xn} is the unique solution of the cofactor equation (7.8) with initial valuesy−i = x−i for i = 0, 1, . . . , k−m and with the values tn obtained above.
To establish (ii) let {(tn, yn)} be a solution of the factor-cofactor systemwith initial values
t0, . . . , t−m+1, y−m, . . . y−k ∈ G.
Note that these numbers determine y−m+1 , . . . , y0 through the cofactorequation
y−j = t−j ∗ [h−j(y−j−1, . . . , y−j−1−k+m)]−1, j = 0, . . . , m− 1. (7.12)
Now for n ≥ 0 we obtain
yn+1 = tn+1 ∗ [hn+1(yn, . . . , yn−k+m)]−1
= gn(tn, . . . , tn−m+1) ∗ [hn+1(yn, . . . , yn−k+m)]−1
= gn(yn ∗ hn(yn−1, . . . , yn−k+m−1), . . . ,
yn−m+1 ∗ hn−m+1(yn−m, . . . , yn−k)) ∗ hn+1(yn, . . . , yn−k+m)−1
= fn(yn, . . . , yn−k).

Time-Dependent Form Symmetries 221
Thus {yn} is the unique solution of Eq. (7.1) that is generated by the initialvalues (3.22) and y−m, . . . y−k. This completes the proof of (b).
(c) We show that each coordinate function φj,n is the projection into coordi-nate j−1 for j > 1. From the definition of Hn in (7.6) and the semiconjugaterelation (7.5) we infer that
Hn+1(Fn(u0, . . . , uk)) = Hn+1(fn(u0, . . . , uk), u0, . . . , uk−1)
= (fn(u0, . . . , uk) ∗ hn+1(u0, . . . , uk−m),
u0 ∗ hn(u1, . . . , uk−m+1), . . . ,
um−2 ∗ hn−m+2(um−1, . . . , uk−1)).
Matching the corresponding component functions in the above equality forj ≥ 2 yields
φj,n(u0 ∗ hn(u1, . . . , uk+1−m), . . . , um−1 ∗ hn−m+1(um, . . . , uk)) =
uj−2 ∗ h(uj−1, uj . . . , uj+k−m−1)
which shows that φj,n maps its j-th coordinate to its (j − 1)-st. Therefore,for each n and every (t1, . . . , tm) ∈ Hn(Gk+1) we have
Φn(t1, . . . , tm) = [gn(t1, . . . , tm), t1, . . . , tm−1]
i.e., Φn|Hn(Gk+1) is of scalar type. Since by Part (a) Hn(Gk+1) = Gm for
every n, it follows that Φn is of scalar type.
As with Theorem 3.1, the SC factorization in the above theorem does notrequire the determination of component functions φj,n for j ≥ 2.
Clearly, concepts of order reduction (types, factor and cofactor chains, etc)also extend to time-dependent form symmetries with essentially the samedefinitions as before and there is no need for repeating them in this chapter.
7.2 Invertible-map criterion revisited
In Section 5.1 we obtained a useful criterion by which we could determinewhether a given difference equation of type (7.1) had form symmetries lead-ing to type-(k, 1) order reductions. We now show that the same useful ideaextends to the time-dependent context.
Consider the following special case of (7.6) with m = k
Hn(u0, u1, . . . , uk) = [u0∗hn(u1), u1∗hn−1(u2), . . . , uk−1∗hn−k+1(uk)] (7.13)
with hn : G → G being a sequence of surjective self-maps of the underly-ing group G. If the form symmetry (7.13) exists then it admits a type-(k, 1)

222 Form Symmetries and Reduction of Order
reduction and its SC factorization is
tn+1 = φn(tn, . . . , tn−k+1), (7.14)
xn+1 = tn+1 ∗ hn+1(xn)−1. (7.15)
The initial values of the factor equation (7.14) are given in terms of theinitial values of (7.1) as
t−j = x−j ∗ h−j(x−j+1), j = 0, 1, . . . , k − 1.
The next result is a direct extension of Theorem 5.1.
THEOREM 7.2
(Time-dependent invertible map criterion) Assume that hn : G → G is asequence of bijections of G. For arbitrary u0, v1, . . . , vk ∈ G and every ndefine ζ0,n(u0) ≡ u0 and for j = 1, . . . , k,
ζj,n(u0, v1, . . . , vj) = h−1n−j+1(ζj−1,n(u0, v1, . . . , vj−1)
−1 ∗ vj) (7.16)
with the usual distinction observed between map inversion and group inversion.Then Eq. (7.1) has the time-dependent form symmetry {Hn} defined by (7.13)if and only if the quantity
fn(ζ0,n, ζ1,n(u0, v1), . . . , ζk,n(u0, v1, . . . , vk)) ∗ hn+1(u0) (7.17)
is independent of u0 for every n. In this case Eq. (7.1) has a SC factorizationwhose factor functions in (7.14) are given by
φn(v1, . . . , vk) = fn(ζ0,n, ζ1,n(u0, v1), . . . , ζk,n(u0, v1, . . . , vk)) ∗ hn+1(u0).(7.18)
PROOF Assume first that (7.17) is independent of u0 for all v1, . . . , vk sothat the functions
φn(v1, . . . , vk) = fn(ζ0,n, ζ1,n, . . . , ζk,n) ∗ hn+1(u0) (7.19)
are well defined. Next, if Hn is given by (7.13) then for all u0, u1, . . . , uk
φn(Hn(u0, u1, . . . , uk)) = φn(u0∗hn(u1), u1∗hn−1(u2), . . . , uk−1∗hn−k+1(uk)).
Now, by (7.16) for each n and all u0, u1
ζ1,n(u0, u0 ∗ hn(u1)) = h−1n (u−1
0 ∗ u0 ∗ hn(u1)) = u1.
Similarly, for each n and all u0, u1, u2
ζ2,n(u0, u0 ∗ hn(u1), u1 ∗ hn−1(u2)) = h−1n−1(ζ1,n(u0, u0 ∗ hn(u1))
−1 ∗u1 ∗ hn−1(u2))
= u2.

Time-Dependent Form Symmetries 223
Suppose by way of induction that
ζl,n(u0 ∗ hn(u1), . . . , ul−1 ∗ hn−l+1(uk)) = ul
for 1 ≤ l < j. Then
ζj,n(u0∗hn(u1), . . . , uj−1∗hn−j+1(uj)) = h−1n−j+1(u
−1j−1∗uj−1∗hn−j+1(uj)) = uj .
Thus by (7.19)
φn(Hn(u0, u1, . . . , uk)) = fn(u0, . . . , uk) ∗ hn+1(u0).
Now if Fn and Φn are the unfoldings of fn and φn, respectively, then
Hn+1(Fn(u0, . . . , uk)) = [fn(u0, . . . , uk) ∗ hn+1(u0), u0 ∗ hn(u1),
. . . , uk−2 ∗ hn−k+2(uk−1)]
= [φn(Hn(u0, u1, . . . , uk)), u0 ∗ hn(u1),
. . . , uk−2 ∗ hn−k+2(uk−1)]
= Φn(Hn(u0, . . . , uk))
and it follows that {Hn} is a semiconjugate form symmetry for Eq. (7.1).The existence of a SC factorization with factor functions defined by (7.18)now follows from Theorem 7.1.
Conversely, if {Hn} as given by (7.13) is a time-dependent form symmetry ofEq. (7.1) then the semiconjugate relation implies that for arbitrary u0, . . . , uk
in G there are functions φn such that
fn(u0, . . . , uk) ∗ hn+1(u0) = φn(u0 ∗ hn(u1), . . . , uk−1 ∗ hn−k+1(uk)). (7.20)
For every u0, v1, . . . , vk in G and with functions ζj,n as defined above, notethat
ζj−1,n(u0, v1, . . . , vj−1) ∗ hn−j+1(ζj,n(u0, v1, . . . , vj)) = vj, j = 1, 2, . . . , k.
Therefore, abbreviating ζj,n(u0, v1, . . . , vj) by ζj,n we have
fn(ζ0,n, ζ1,n, . . . , ζk,n) ∗ hn+1(u0) = φn(ζ0,n ∗ hn(ζ1,n), ζ1,n ∗ hn−1(ζ2,n),
. . . , ζk−1,n ∗ hn−k+1(ζk,n))
= φn(v1, . . . , vk)
which is independent of u0.
7.3 Time-dependent linear form symmetry
Among the various form symmetries discussed in Chapter 5, the linear formsymmetry was one of the most interesting and also one that naturally allows

224 Form Symmetries and Reduction of Order
dependence on n. The time-dependent version of this form symmetry is definednext.
DEFINITION 7.2 Let F be a nontrivial field and {αn} a sequence ofelements of F such that αn ∈ F\{0} for all n ≥ −k + 1. A (time-dependent)linear form symmetry is defined as the following special case of (7.13) withhn(u) = −αn−1u
[u0 − αn−1u1, u1 − αn−2u2, . . . , uk−1 − αn−kuk]. (7.21)
We call the sequence {αn} of nonzero elements in F the eigensequence ofthe linear form symmetry. If Eq. (7.1) has a linear form symmetry then {αn}may be called an eigensequence of (7.1).
Use of the term “eigen” from the linear theory is apt here for two reasons.Note that the sequence {αn} characterizes the linear form symmetry (7.21)completely. Further, we find below that linear difference equations indeedhave linear form symmetries.
The existence of a linear form symmetry implies a type-(k, 1) order reduc-tion for Eq. (7.1) and a SC factorization where the cofactor equation (7.15)is determined more specifically as
xn+1 = tn+1 + αnxn. (7.22)
The following necessary and sufficient condition for the existence of a time-dependent linear form symmetry is an application of Theorem 7.2 and a gen-eralization of Corollary 5.5.
COROLLARY 7.1
Equation (7.1) has a time-dependent linear form symmetry of type (7.21) ona nontrivial field F if and only if there is an eigensequence {αn} in F\{0}that makes the following quantity
fn(u0, ζ1,n(u0, v1), . . . , ζk,n(u0, v1, . . . , vk)) − αnu0 (7.23)
independent of u0, where for all n ≥ 0 and for j = 1, . . . , k,
ζj,n(u0, v1, . . . , vj) =ζj−1,n(u0, v1, . . . , vj−1) − vj
αn−j
=1
∏ji=1 αn−i
(u0 −
j∑
i=1
vi
i∏
p=1
αn−p
).
PROOF The conclusions follow immediately from Theorem 7.2 usinghn(u) = −αn−1u. The last equality above is established from the equality
preceding it by routine calculation.

Time-Dependent Form Symmetries 225
REMARK 7.1 If Eq. (7.1) has a linear form symmetry then by Corollary7.1 an eigensequence of (2.3) can be defined equivalently as a sequence {αn}in F\{0} for which the quantity in (7.23) is independent of u0 for every n ≥ 0.
Let us illustrate the preceding corollary with an example.
Example 7.1
Consider the third-order difference equation
xn+1 = anxn + bnxn−1 + gn(xn + cxn−1 + dxn−2) (7.24)
where c, d ∈ R with d 6= 0 and for all n, an, bn ∈ R and gn : R → R.By Corollary 7.1 a linear form symmetry for (7.24) exists if and only if thequantity in (7.17), i.e.,
anu0 + bnζ1,n + gn(u0 + cζ1,n + dζ2,n) − αnu0 (7.25)
is independent of u0 for all n. Substituting
ζ1,n =u0 − v1αn−1
, ζ2,n =ζ1,n − v2αn−2
=u0 − v1 − αn−1v2
αn−1αn−2
in (7.25) and rearranging terms gives
(an +
bnαn−1
− αn
)u0 −
bnαn−1
v1 +
gn
((1 +
c
αn−1+
d
αn−1αn−2
)u0 −
c
αn−1v1 −
d
αn−2v2
)
which is independent of u0 for all n if the coefficients of the u0 terms are zeros,i.e., for all n,
αn = an +bnαn−1
, (7.26)
αn−1 = −c − d
αn−2. (7.27)
A single sequence {αn} that is never zero for all n ≥ 0 must exist that satisfiesboth (7.26) and (7.27). If such a sequence exists then the SC factorization of(7.24) is obtained via Theorem 7.2. We first calculate the factor functionsusing (7.18) as
φn(v1, v2) = − bnαn−1
v1 + gn
(− c
αn−1v1 −
d
αn−2v2
)
= (an − αn)v1 + gn
(− c
αn−1v1 + (c+ αn−1)v2
)

226 Form Symmetries and Reduction of Order
Therefore, the SC factorization is
tn+1 = (an − αn)tn + gn
(− c
αn−1tn + (c+ αn−1)tn−1
),
xn+1 = αnxn + tn+1.
If an = a and bn = b are constants for all n then the pair of equations (7.26)and (7.27) share a constant solution, i.e., a common fixed point, if the pair ofquadratic equations
λ2 − aλ− b = 0, λ2 + cλ + d = 0
have a common nonzero root. This is similar to what we observed in Section5.6 on the joint eigenvalues of difference equations with linear arguments andis not surprising. If an, bn are constants then Eq. (7.24) is indeed of the typestudied in Section 5.6.
In general, Eq. (7.26) need not have constant solutions; however, commonsolutions to equations (7.26) and (7.27) may still exist, as the next exampleillustrates.
Example 7.2
Consider the following special case of Eq. (7.24)
xn+1 = (−1)n+1xn − 2xn−1 + gn(xn + xn−2). (7.28)
In this case, (7.26) and (7.27) take the following forms
αn = (−1)n+1 − 2
αn−1(7.29)
αn−1 = − 1
αn−2. (7.30)
Every solution of Eq. (7.30) is a sequence of period 2
{q,−1
q, q,−1
q, . . .
}(7.31)
where q = α−2 ∈ R. Now (7.30) yields α−1 = −1/q, which we substitute asan initial value in Eq. (7.29) to get
α0 = −1 + 2q.
Now to obtain the period-two sequence in (7.31) as a solution of (7.29), werequire the above value of α0 to be equal to q; thus
α0 = q ⇒ 2q − 1 = q ⇒ q = 1.

Time-Dependent Form Symmetries 227
We check that if α0 = q = 1 in (7.29) then
α1 = 1 − 2
q= −1 = −1
q, α2 = −1 − 2
−1= 1 = q, etc
so that both (7.29) and (7.30) generate the same sequence {αn} where αn =(−1)n for n ≥ −2. Now from Example 7.1 we obtain the following SC factor-ization of (7.28):
tn+1 = 2(−1)n+1tn + gn
((−1)n+1tn−1
),
xn+1 = (−1)nxn + tn+1.
7.4 SC factorization of linear equations
It is worth noting at this stage that (7.26) and (7.27) above are examplesof Riccati equations; see Example 4.10. In this section, we discover thatRiccati equations occur naturally in the context of reductions of order fornonautonomous linear equations in association with the linear rather than theinversion form symmetry. The idea in Example 4.10 is also applied later inthis section to obtain a criterion for the existence of the linear form symmetrythat does not explicitly involve the Riccati equation; instead, the criterion isbased on the existence of a nonzero solution of the homogeneous part, whichis an HD1 equation. This interplay between the linear form symmetry in afield F and the inversion form symmetry in the multiplicative group of unitsF\{0} is a feature that is unique to linear equations.
7.4.1 Factorization theorem for linear equations
The following application of Corollary 7.1 and Theorem 7.2 gives a type-(k, 1)semiconjugate factorization for nonautonomous and nonhomogeneous lineardifference equations.
COROLLARY 7.2
(The general linear equation) Let {ai,n}, i = 1, . . . , k and {bn} be given se-quences in a nontrivial field F such that ak,n 6= 0 for all n. The nonhomoge-neous linear equation of order k + 1
xn+1 = a0,nxn + a1,nxn−1 + · · ·+ ak,nxn−k + bn (7.32)

228 Form Symmetries and Reduction of Order
has the linear form symmetry with eigensequences {αn} in F\{0} that satisfythe following Riccati difference equation of order k
αn = a0,n +a1,n
αn−1+
a2,n
αn−1αn−2+ · · ·+ ak,n
αn−1 · · ·αn−k. (7.33)
The corresponding SC factorization of (7.32) is
tn+1 = bn −k∑
i=1
k∑
j=i
aj,n
αn−i · · ·αn−jtn−i+1 (7.34)
xn+1 = αnxn + tn+1. (7.35)
PROOF We determine a sequence {αn} of nonzero elements of F suchthat for each n the quantity (7.23) is independent of u0 for the followingfunction
fn(u0, . . . , uk) = a1,nu0 + a2,nu1 + · · ·+ ak,nuk + bn.
For arbitrary u0, v1, . . . , vk ∈ F and j = 0, 1, . . . , k define ζj,n(u0, v1, . . . , vj)as in Corollary 7.1. Then (7.23) is
−αnu0 + bn + a1,nu0 + a2,nζ1,n(u0, v1) + · · ·+ ak,nζk,n(u0, v1, . . . , vk) =
bn +
k∑
j=1
aj,n∏ji=1 αn−i
− αn
u0 −k∑
j=1
aj,n
j∑
i=1
vi∏jp=i αn−p
.
The above quantity is independent of u0 if and only if the coefficient of u0
is zero for all n; i.e., if {αn} is a solution of the difference equation
αn =
k∑
j=1
aj,n∏ji=1 αn−i
which is Eq. (7.33). Thus by Corollary 7.1 Eq. (7.32) has the linear formsymmetry (7.21). Its SC factor equation is obtained using (7.18) in Theorem7.2 and the above calculations
tn+1 = bn −k∑
j=1
aj,n
j∑
i=1
tn−i+1∏jp=i αn−p
= bn −k∑
i=1
k∑
j=i
aj,n
αn−i · · ·αn−jtn−i+1.
Finally, the cofactor equation is derived immediately from the linear formsymmetry and the proof is complete.

Time-Dependent Form Symmetries 229
The Riccati equation (7.33) may also be viewed as a constraint relation thatcan be written more symmetrically as
a0,n
αn+
a1,n
αnαn−1+
a2,n
αnαn−1αn−2+ · · ·+ ak,n
αnαn−1 · · ·αn−k= 1 (7.36)
involving the variable coefficients of (7.32) and the sequence {αn} that satisfiesit.
We emphasize that in Corollary 7.2 the only requirement is to find anyone solution of (7.33), or equivalently, of (7.36) that is well defined; i.e., it isnot necessary to gather substantial information about the solutions of Riccatiequation (or relation). The next example illustrates Corollary 7.2.
Example 7.3
Consider the second-order difference equation
xn+1 = (−1)n+1xn + xn−1 + bn (7.37)
where bn, x0, x−1 are in a nontrivial field F . The associated Riccati equationof (7.37) is
rn = (−1)n+1 +1
rn−1. (7.38)
First, let F be a field of characteristic zero such as Q, R or C. In such fields,straightforward calculations show that if r0 6= 0,−1 then
r1 =r0 + 1
r0, r2 = − 1
r0 + 1, r3 = −r0,
r4 = −r0 + 1
r0, r5 =
1
r0 + 1, r6 = r0.
It follows that all solutions of the Riccati equation (7.38) that start outsidethe singularity set {0,−1} are eigensequences with period 6 (which is minimalin Q or R but need not be so in C). The SC factorization of the linear equation(7.37) is obtained by Corollary 7.2 as
tn+1 = − 1
rn−1tn + bn,
xn+1 = rnxn + tn+1.
For the sake of comparison, consider next a finite field, F = Z3 = {0, 1, 2}with addition and multiplication modulo 3, in which the group of units {1, 2} isnontrivial. Then r0 has only two possible nonzero values 1,2. It is readily seenthat r0 = 1 gives a solution {1, 2, 1, 2, . . .} of period two for (7.38) and since2 = −1 in Z3, we may indicate this solution as rn = (−1)n+1. Now Corollary7.2 yields the following SC factorization of the linear equation (7.37) on Z3
tn+1 = (−1)n+1tn + bn,
xn+1 = (−1)n+1xn + tn+1.

230 Form Symmetries and Reduction of Order
We also note that r0 = 2 gives r1 = 1+2 = 0 in Z3 so 2 is in the singularityset of (7.38). In fact, this singularity set is {0, 2} = {0,−1}.
Recall from Example 4.10 that the Riccati equation (7.33) is itself the SCfactor equation of the homogeneous part of (7.32) relative to the inversionform symmetry. We discussed the latter form symmetry in Section (5.3)in relation to HD1 equations; even with variable coefficients a homogeneouslinear difference equation is HD1 relative to the multiplicative group of unitsin a field. This observation leads to the following version of Corollary 7.2 thatdoes not involve the Riccati equation explicitly.
COROLLARY 7.3
Let {ai,n}, i = 1, . . . , k and {bn} be given sequences in a nontrivial field Fsuch that ak,n 6= 0 for all n. Assume that the homogeneous part of (7.32)has a solution {yn} in F such that yn 6= 0 for all n. Then {yn/yn−1} is aneigensequence of (7.32) whose SC factorization is given by the pair of equations(7.34) and (7.35).
The next result gives a special case of Corollary 7.3 that is more definitive.
COROLLARY 7.4
In Eq. (7.32) let {ai,n}, i = 1, . . . , k and {bn} be sequences of real numberswith ai,n ≥ 0 for all i, n and ak,n > 0 for all n. Then (7.32) has an eigense-quence {yn+1/yn} and a SC factorization in R given by the pair of equations(7.34) and (7.35).
PROOF If we choose y−j = 1 for j = 0, . . . , k then the correspondingsolution {yn} of the homogeneous part of (7.32) is a sequence of positive real
numbers. Now an application of Corollary 7.3 completes the proof.
7.4.2 Constant coefficients without field extensions
The occurrence of a Riccati equation in Corollary 7.2 raises an interestingquestion. How does Eq. (7.33) fit into the framework defined previouslyin Section 5.6.4 for equations with constant coefficients? Since the factorequation (7.34) is again the same type of equation as (7.32), Corollary 7.2can be applied repeatedly as long as each of the associated Riccati equationspossesses at least one solution. In the case of constant coefficients whereaj,n ≡ aj for all n, that solution may be taken to be the constant solutionrepresented by a fixed point of the autonomous Riccati equation, (7.33) inthe field F . Our earlier work on difference equations with linear argumentsled to exactly such constant solutions since the fixed points of Eq. (7.33) withconstant coefficients are none other than the eigenvalues of the homogeneous

Time-Dependent Form Symmetries 231
part of (7.32), also with constant coefficients. If F is an algebraically closedfield such as C then the eigenvalues (and thus the fixed points) can always befound when the coefficients are constant. If F is not algebraically closed (likeR or Q) then the eigenvalues may exist only in an extension field of F . In thiscase, the SC factorization discussed in Section 5.6.4 cannot be defined in F .
We notice that in Corollary 7.2 with variable coefficients, polynomial rootsare not relevant. Hence, the issue of field extensions does not arise and wedeal instead with the associated Riccati equation and its solutions (eigense-quences) in the given underlying field F . This idea remains valid even if theRiccati equation (and thus the original linear equation) has constant coeffi-cients. Therefore, in the case of constant coefficients, if the Riccati equationis used instead of the characteristic polynomial then extensions of F are notrequired for defining the factor or cofactor equations. It is only necessary todemonstrate the existence of at least one valid solution of the Riccati equa-tion; or equivalently, show that the singularity set of the Riccati equation isnot all of F .
The following result on nonhomogeneous linear equations with constant co-efficients is an immediate consequence of Corollary 7.2. It improves Corollary5.11 in Section 5.6.4 by allowing eigensequences when eigenvalues do not existin the given field F .
COROLLARY 7.5
Let {bn} be a given sequence in a nontrivial field F and let {ai}, i = 1, . . . , kbe constants in F such that ak 6= 0.(a) The nonhomogeneous linear equation of order k + 1 with constant coeffi-cients
xn+1 = a0xn + a1xn−1 + · · ·+ akxn−k + bn (7.39)
has a linear form symmetry with eigensequence {αn} for every solution {αn}in F of the following autonomous Riccati equation of order k
αn = a0 +a1
αn−1+
a2
αn−1αn−2+ · · ·+ ak
αn−1 · · ·αn−k. (7.40)
(b) Every fixed point of (7.40) in F is a nonzero root of the characteristicpolynomial of (7.39), i.e., a solution of
λk+1 − a0λk − a1λ
k−1 − · · · − ak−1λ− ak (7.41)
or an eigenvalue of the homogeneous part of (7.39) in F . As constant solutionsof (7.40) such eigenvalues are constant eigensequences of (7.39).
Example 7.4
Consider the nonhomogeneous linear equation
xn+1 = xn + xn−1 + cn (7.42)

232 Form Symmetries and Reduction of Order
where the constants cn are rationals, i.e., F = Q. Then the associated Riccatiequation
rn = 1 +1
rn−1(7.43)
has two irrational fixed points ±γ where γ is the golden ratio
γ =1 +
√5
2.
These constant solutions γ± yield the SC factorization
tn+1 = − 1
γ+tn + cn = γ−tn + cn,
xn+1 = γ+xn + tn+1
over R. This factorization is not valid over Q; however, (7.43) is a rationalfunction and any rational initial value r0 > 0 yields a valid solution of (7.43).In particular, the Fibonacci sequence {ϕn}
{1, 1, 2, 3, 5, 8, . . .}
is a solution of the homogeneous part of (7.42) and ratios αn = ϕn+1/ϕn ofits consecutive terms give the solution of (7.43) with r0 = 1. By Corollary 7.3such a solution of (7.43) yields the following SC factorization of Eq. (7.45)that is valid in Q:
tn+1 = cn − ϕn−1
ϕntn
xn+1 =ϕn+1
ϕnxn + tn+1.
Note that limn→∞ ϕn+1/ϕn = γ+ in the above factorization; in this way thefactorization over Q is related in a simple way to the factorization over R.
The next example illustrates factorization over the real numbers when theeigenvalues are complex.
Example 7.5
For a given sequence dn of real numbers the homogeneous part of the equation
xn+1 = xn − xn−1 + dn (7.44)
has two complex eigenvalues
α± =1 ± i
√3
2

Time-Dependent Form Symmetries 233
FIGURE 7.1
Graphs of Riccati equations, one having two fixed points γ±, the otherhaving none.
that are roots of λ2 −λ+1. Thus, (7.44) has no constant eigensequences in R
but it does have nonconstant real eigensequences since the Riccati equation
αn = 1 − 1
αn−1
with the initial value α0 = 2 has a solution{
2,1
2,−1, 2,
1
2,−1, . . .
}
of period three in R. The corresponding real SC factorization is
tn+1 = − 1
αn−1tn, xn+1 = αnxn + tn+1.
In contrast to the factorization of Eq. (7.42) there is no obvious relationshipbetween the factorization of (7.44) over the real numbers and its factorizationwith constant eigensequences over the complex numbers.
Figure 7.1 illustrates preceding two examples. In one case there are tworeal fixed point, namely, γ± while in the other case there are no real fixedpoints.
Example 7.6
Consider the non-homogeneous linear equation with constant coefficients
xn+1 = axn + bxn−1 + γn, b 6= 0 (7.45)

234 Form Symmetries and Reduction of Order
where the fixed coefficients a, b and the sequence of constants γn are real, i.e.,F = R. Let S be the singularity set of the Riccati equation
rn = a+b
rn−1. (7.46)
It can be shown that S is a proper subset of R (see Grove, et al (2001) orKulenovic and Ladas (2002), Section 1.6). Thus, we may choose real r0 6∈ S.Then the SC factorization
tn+1 = γn − b
rn−1tn = γn − (rn − a)tn
xn+1 = rnxn + tn+1
of Eq. (7.45) is defined on R for all a, b even if the eigenvalues of the homo-geneous part of (7.45) are complex (i.e., if a2 + 4b < 0).
In the next example we consider a finite field where a complete analysis ofall parameter values in (7.45) is possible.
Example 7.7
Consider Eq. (7.45) again but now on the field Z3 = {0, 1, 2} with additionand multiplication defined modulo 3. There are a limited number of cases toconsider here. Since b 6= 0, there are six possible cases for the two parameters:a = 0, 1, 2 and b = 1, 2. Similarly, for the associated Riccati equation (7.46) anonzero initial value r0 can have only the two possible values 1,2. Examiningthese cases one at a time (details left to the reader as an exercise) we arriveat the following conclusions:
If b = 2 and a 6= 0 then (7.46) has one constant solution in Z3 in each case(ρ = 2 and ρ = 1, respectively). Hence, SC factorizations exist by Corollary7.2 based on these solutions.
If b = 2 and a = 0 then (7.46) has no constant solutions in Z3. However,each of its solutions are periodic with period 2 so a SC factorization over Z3
exists by Corollary 7.2 based on this solution.
If b = 1 and a = 0 then all solutions of (7.46) in Z3 are constant sequences.
If b = 1 and a 6= 0 then Eq. (7.46) has no valid solutions (constant or not)in Z3. Therefore, Corollary 7.2 does not apply to Eq. (7.45) on Z3 in thesecases.
The existence of SC factorizations of linear equations over arbitrary finitefields or over fields of positive characteristic appears to be a challenging prob-lem that may involve significant technical issues in algebra and number theory.

Time-Dependent Form Symmetries 235
7.4.3 Implications of the existence of constant solutions ofthe Riccati equation
When they exist in a given field F , constant solutions have the practicaladvantage of simplifying calculations and derivations of results considerably.The appearance of a Riccati equation in Corollary 7.2 thus raises a question:What restrictions are imposed on the variable coefficients in Eq. (7.32) bythe existence of constant solutions of (7.33), if any? The next result statesessentially that the more constant solutions there are, the more related, andrestricted, are the coefficients of the Riccati equation.
PROPOSITION 7.1
Assume that the Riccati equation (7.33) has m distinct constant solutionsρ1, . . . , ρm in a nontrivial field F , 1 ≤ m ≤ k. Then the variable coefficientsof the linear non-homogeneous equation (7.32) satisfy
aj,n = cj,1am,n + · · ·+ cj,k−m+1ak,n + cj,k−m, 0 ≤ j ≤ m− 1 (7.47)
where the quantities cj,1, . . . , cj,k−m are rational functions of ρ1, . . . , ρm. There-fore, m of the variable coefficients in (7.32) are determined by the remainingk+1−m coefficients. In particular, if Eq. (7.33) has k distinct constant solu-tions in F then the coefficients of Eq. (7.32) have only one arbitrary variablesequence; i.e., the variable coefficients are all of type
aj,n = aj + bjσn, aj, bj, σn ∈ F , j = 0, 1, . . . , k, σn , n ≥ 0 (7.48)
that was encountered in Section 5.6.4 on difference equations with linear ar-guments.
PROOF Substituting each of the constant solutions ρ1, . . . , ρm in (7.33)gives one of the equations in the following system of m equations
a0,n +1
ρja1,n +
1
ρ2j
a2,n + · · ·+ 1
ρkj
ak,n = ρj , 1 ≤ j ≤ m.
Each equation above is linear in a0,n, . . . , ak,n so the first m of these, i.e.,a0,n, . . . , am−1,n can be eliminated as functions of the remaining parametersand rational functions of ρ1, . . . , ρm as specified in (7.47).
Next, if (7.33) has k distinct constant solutions ρ1, . . . , ρk then setting m =k, each of the coefficients aj,n can be expressed in terms of ak,n alone as
aj,n = cj,1ak,n + cj,0, 0 ≤ j ≤ k − 1.
Defining σn = ak,n for all n and aj = cj,0, bj = cj,1 for 0 ≤ j ≤ k − 1 and
ak = 0, bk = 1 we obtain (7.48).

236 Form Symmetries and Reduction of Order
7.5 Notes
The material in this section appears in part in Sedaghat (2010a, 2010b).The results presented here are the most general in this book for recursivedifference equations. In particular, these results extend those in Chapter5 and they include semiconjugate factorizations of general (nonautonomousand nonhomogeneous) linear equations over arbitrary algebraic fields. Clearly,other types of SC factorizations, e.g., type-(1, k) are also possible with time-dependent form symmetries which are left to future investigations in thisinteresting and challenging area.
7.6 Problems
7.1 (a) Using the ideas in Examples 7.1 and 7.2 show that the differenceequation
xn+1 = anxn + bnxn−1 + gn(xn − cxn−2),
an, bn ∈ R for all n, c ∈ R, c 6= 0
has the linear form symmetry if b0 6= c, there is q 6= 0 such that
a0 = q
(1 − b0
c
)
and for all n ≥ 1
an =c− bnsn
, sn =
{q, if n is evenc/q, if n is odd
.
(b) Use the results in (a) with q = 1 to find a SC factorization for thefollowing difference equation
xn+1 = (−1)n(1 + bn)xn + bnxn−1 + gn(xn + xn−2)
where bn is a sequence of real numbers such that b0 6= −1.(c) Use the results in (b) to find a SC factorization for the difference equa-
tion
xn+1 =(−1)n
n+ 1xn − n
n+ 1xn−1 +
βn
xn + xn−2 + γn
where βn, γn ∈ R for all n.
7.2 Provide the details in Example 7.7.

Time-Dependent Form Symmetries 237
7.3 Let {bn} be any sequence of real numbers. Referring to Example 7.7, showthat both of following difference equations have SC factorizations over R anddetermine these factorizations using the constant solutions of the associatedRiccati equations.
xn+1 = xn + xn−1 + bn
xn+1 = 2xn + xn−1 + bn.
7.4 (a) Verify that if {xn} is the solution of the linear equation
xn+1 = xn + xn−1
in the finite field Z11 with initial values x−1 = 1 and x0 = 4 then xn 6= 0 forall n ≥ −1.
(b) Let {bn} be an arbitrary sequence in Z11. Conclude from (a) and Corol-lary 7.3 that the linear nonhomogeneous equation
xn+1 = xn + xn−1 + bn
has a SC factorization over Z11. Determine this factorization.We note that Z11 is not algebraically closed and does not contain the ir-
rational eigenvalues of the Fibonacci equation. Hence the theory in Section5.6.4 does not apply to this problem.
7.5 If p is a prime number and p ≥ 5 then prove that the difference equation
xn+1 = 3xn + (p− 2)xn−1 + bn
has a SC factorization in the field Zp for any sequence {bn} in Zp.Hint. Note that p − 2 = −2 in Zp and look for a constant solution of the
homogeneous part.
7.6 (a) In Proposition 7.1 let k = 2. For m = 1, 2 determine the coefficientscj,i explicitly.
(b) Repeat Part (a) for k = 3 and m = 1, 2, 3.

This page intentionally left blankThis page intentionally left blank

8
Nonrecursive Difference Equations
Let S be a nonempty set and {fn}, {gn} sequences of functions fn, gn : Sk+1 →S where k is a positive integer. We call the equation
fn(xn, xn−1, . . . , xn−k) = gn(xn, xn−1, . . . , xn−k) (8.1)
a “scalar” difference equation of order k in the set S. Unlike the differenceequations studied in previous chapters, Eq. (8.1) is not recursive and generallyit does not unfold to a (vector) self-map of Sk+1. Thus semiconjugacy does notapply to equations of type (8.1). On the other hand, (8.1) clearly generalizesthe types of equations studied in previous chapters since the recursive equationof order k,
xn = ψn(xn−1, . . . , xn−k) (8.2)
is a special case of (8.1) where
fn(u0, u1, . . . , uk) = u0
gn(u0, u1, . . . , uk) = ψn(u1, . . . , uk)
for all n and all u0, u1, . . . , uk ∈ S.Consideration of nonrecursive (or implicit) difference equations such as (8.1)
may occur naturally. For example, the following equation on the set of realnumbers R:
|xn| = a|xn−1 − xn−2|, 0 < a < 1 (8.3)
states that the magnitude of a quantity xn at time n is a fraction of thedifference between its values in the two immediately preceding times; however,(8.3) leaves the sign of xn undetermined. For instance, if we set x0 = −1 andx1 = 1 then we obtain |x2| = 2a but the actual value of x2 can be either 2aor −2a. As a possible physical interpretation of (8.3) we imagine a node in acircuit that in every second n fires a pulse xn that may go either to the right(if xn > 0) or to the left (if xn < 0) but the amplitude |xn| of the pulse obeysEq. (8.3). What sorts of signal patterns satisfy Eq. (8.3)? It happens thatmany different types of patterns are possible, most of which do not arise if theabsolute value is absent from the left-hand side of (8.3); see the next sectionof this chapter for additional details pertaining to (8.3) and similar equations.
The question arises as to whether the notions of form symmetry and reduc-tion of order can be still defined in the nonrecursive context, which is moregeneral. In this chapter, we show that for Eq. (8.1) the basic concepts of order
239

240 Form Symmetries and Reduction of Order
reduction such as form symmetry and factorization into factor and cofactorpairs of equations can still be defined as before, even without the standardsemiconjugate relation. A concept that is similar to the semiconjugate re-lation but does not require the unfolding map is sufficient for defining formsymmetries and deriving the lower order factor and cofactor equations.
Eq. (8.1) represents a generalization of the recursive equation (8.2) in adifferent direction than the customary one; namely, to vector maps (recallthat the unfolding of (8.2) is a special vector map of the k-dimensional state-space). In another departure from the recursive format of (8.2), uniquenessof solutions is lost as there may be an infinite number of solutions of (8.1)that pass through any prescribed point in the state-space (as usual, a solutionof Eq. (8.1) in S is defined as any sequence {xn} in S that satisfies theequality (8.1) for every n). Therefore, we no longer think of solutions as orbitsgenerated through map iteration starting from some initial value. However,preserving the pattern of previous chapters in keeping with forward solutions(n a positive integer) it may be helpful at times to interpret or plot solutionsof (8.1) as orbits {(xn, xn−1, . . . , xn−k)} in the state-space Sk+1 that contain,or pass through a given “initial point” (x0, x−1, . . . , x−k+1) corresponding ton = 0.
Analyzing the solutions of a nonrecursive difference equation such as (8.1)is generally more difficult than analyzing the solutions of recursive equations.In addition to the loss of uniqueness, even the existence of solutions for (8.1)in a particular set is not guaranteed. However, studying the form symmetriesand reduction of order in nonrecursive equations is worth the effort. Thegreater generality of these equations not only leads to the resolution of awider class of problems, but it also provides for increased flexibility in handlingrecursive equations. As illustrated in the next section (among other things)some recursive equations may have nonrecursive form symmetries that themore specialized theory based on semiconjugacy cannot determine.
8.1 Examples and discussion
We begin our discussion with a few examples to illustrate the existence ofnonrecursive form symmetries and how they can reduce a given equation to apair of lower order equations resembling a factor/cofactor pair.
Example 8.1
A recursive equation with nonrecursive form symmetry. Consider the recursivedifference equation
yn =√ay2
n−1 + byn−1 − abyn−2 + c (8.4)

Nonrecursive Equations 241
where a, b, c ∈ R. The occurrence of a square root limits the occurrence of realsolutions for which the quantity under the root must be nonnegative for all n.What conditions on parameters a, b, c or on initial values y0, y−1 imply that(8.4) has real solutions? We now show that an answer to this question can beobtained by first answering the question: Does (8.4) have a factorization intolower order difference equations?
An SC factorization would be nice to have but it is not obviously indicated.We try another approach. By squaring both sides of (8.4) and re-labeling thevariable as xn we obtain
x2n − ax2
n−1 − bxn−1 + abxn−2 = c. (8.5)
Any real solution {yn} of (8.4) is clearly also a (nonnegative) solution of thenonrecursive equation (8.5). Of course, (8.5) is a less restricted equation asit may have solutions in R that cannot be generated by (8.4); e.g., solutionsin which xn < 0 for infinitely many values of n. In fact, if {βn} is a fixed butarbitrarily selected binary sequence taking values in {−1, 1} then every realsolution of the equation
sn = βn
√as2n−1 + bsn−1 − absn−2 + c (8.6)
is also a solution of (8.5) since after squaring, we see that sn satisfies Eq.(8.5).
Splitting into a pair of lower order equations. Now, rearranging terms in(8.5) yields
x2n − bxn−1 = a(x2
n−1 − bxn−2) + c
which reveals an order-reducing substitution x2n − bxn−1 = tn that gives the
system of first-order equations
tn = atn−1 + c (8.7)
x2n − bxn−1 = tn. (8.8)
This is entirely similar to a SC factorization with a factor (8.7) that in thiscase is nonhomogeneous linear. The quadratic equation (8.8) is the analog ofthe cofactor equation, although it is a nonrecursive first-order equation. Eachsolution of the nonrecursive equation (8.5) may be found by finding a solutionof the first order equation (8.7) and then using this solution for tn in (8.8).In the next section we make these concepts precise.
It is an important fact that neither of the two recursive forms uh(v) oru + h(v) can express the quadratic form u2 − bv. Therefore, x2
n − bxn−1 isnot a form symmetry of the type that was discussed in previous chapters.Nevertheless, solving (8.8) for xn and choosing the nonnegative square rootgives a “factorization”
tn = atn−1 + c,
xn =√bxn−1 + tn

242 Form Symmetries and Reduction of Order
for Eq. (8.4) over the real numbers that is not a SC factorization of the typediscussed in previous chapters.
A discussion of solutions. We now use the above factorization to determineconditions on parameters a, b, c and initial values y0, y−1 that imply (8.4) hasreal solutions. For illustration, we consider an interesting special case herewith parameter values
a = 1, c = 0, b > 0.
Then (8.7) is the trivial equation tn = tn−1 and each solution of the recur-sive equation
yn =√y2
n−1 + b(yn−1 − yn−2) (8.9)
is also a solution of the first-order, recursive equation
xn =√bxn−1 + t0, t0 = x2
0 − bx−1 (8.10)
where x0 = y0 and x−1 = y−1. This equation is easier to understand thanthe second-order (8.9). For each point (x0, x−1) and the corresponding t0, thesolution of (8.10) is an orbit of the one-dimensional map
g(u, t0) =√bu+ t0
which is a member of a family of maps (a different map for each distinct valueof t0). A routine examination of g(u, t0) leads to the following conclusions(details left to the reader as an exercise):
1. If t0 > 0 (i.e., x20 > bx−1) then the orbit with initial value x0 converges
to the unique, attracting fixed point x(t0), i.e.,
limn→∞
xn = x(t0)
where
x(t0) =1
2
(b+
√b2 + 4t0
).
Further, to ensure that a real solution is obtained, it is necessary that
bx0 + t1 = bx0 + t0 ≥ 0
i.e.,
x−1 ≤ x0 +1
bx2
0, x0 ∈ (−∞,∞). (8.11)
See Figure 8.1.

Nonrecursive Equations 243
2. If t0 ≤ 0 then fixed points exist if b2 + 4t0 ≥ 0, i.e., if
x−1 ≤ b
4+
1
bx2
0, x0 ∈ (−∞,∞). (8.12)
In this case, there are two (nonnegative) fixed points:
x±(t0) =1
2
(b±
√b2 + 4t0
)
Of these, x−(t0) is repelling and x+(t0) is attracting. Thus, each orbitof g(u, t0) with initial value
x0 > x−(t0) (8.13)
converges to x+(t0) if, to satisfy (8.11) and (8.12),
x−1 ≤ min
{x0,
b
4
}+
1
bx2
0, x0 ∈ (−∞,∞). (8.14)
If (8.14) holds then inequality (8.13) holds trivially if x0 > b/2. Other-wise, it is readily verified that (8.13) holds if
x−1 < x0 ≤ b
2.
3. If x0 = x−1 then t0 = x20 − bx0 and each (positive) solution of (8.10) is
constant. Thus on the 45◦ line v = u in the state-space R2 every realsolution of (8.9) is constant.
4. From Items 1-3 above, we conclude that the real solution of Eq. (8.9)converges to x(t0) (or x+(t0)) if the point (x0, x−1) is in the followingregion of the state-space
{(x0, x−1) : x−1 ≤ min
{x0,
b
4
}+
1
bx2
0
}∩[0,b
2
]× (−∞, x0). (8.15)
See Figure 8.2. Points outside of this region either stay fixed at x−(t0)or do not result in real solutions. In particular, it follows that every realsolution of (8.9) that is not constant converges to x(t0) (or x+(t0)).
Figure 8.1 illustrates Item 1 in the preceding example with
b = 2; x−1 = 1, x0 = 1.8;
t0 = 1.24, x(t0) = x+(t0) = 2.497.

244 Form Symmetries and Reduction of Order
FIGURE 8.1
Illustrating a case in Example 8.1 (see the text for details).
The graph of g(u, t0) is shown in the left panel of Figure 8.1 from which itis clear that x(t0) = x+(t0) is an attracting fixed point for all (x0, x−1) in theregion (8.15) that are on the parabola
x−1 =1
bx2
0 −t0b.
The corresponding solution {xn} that converges to x(t0) appears in theright panel. Region (8.15) is shown in Figure 8.2 as the shaded part with thepoint (x0, x−1) = (1.8, 1) identified as a black dot inside it. The unshaded orclear region thus represents the singularity set of Eq. (8.9).
The asymptotic behaviors of solutions discussed in the preceding exampleis not as easily inferred from a direct investigation of (8.9). The bifurcationin state-space that occurs when t0 changes sign to negative is not readilyapparent from the second-order equation (8.9). Further, the reduction oforder to the recursive Eq. (8.10) is derived indirectly via the nonrecursiveequation (8.5) and its factorization rather than a semiconjugate relation.
In the next example we discuss the possibility of repeated reductions oforder and some other issues.
Example 8.2
A third-order equation with absolute values. Let {an} be a given sequence ofnonzero real numbers and consider the following difference equation on R:
|xn + xn−1| = an|xn−1 − xn−3|. (8.16)
Splitting into a pair of lower order equations. By adding and subtractingxn−2 inside the absolute value on the right-hand side of (8.16) we find that
|xn + xn−1| = an|xn−1 + xn−2 − (xn−2 + xn−3)|. (8.17)

Nonrecursive Equations 245
FIGURE 8.2
The shaded region shows the part of the state-space where real solutionsexist; therefore, the clear region is the singularity set of Eq. (8.9).
The substitution (analogous to a linear form symmetry)
tn = xn + xn−1 (8.18)
in (8.17) results in the second-order absolute value difference equation
|tn| = an|tn−1 − tn−2| (8.19)
that is related to (8.16) via (8.18). Eq. (8.19) is analogous to a factor equationfor (8.16) while (8.18), written as
xn = tn − xn−1 (8.20)
is analogous to a (recursive) cofactor equation.The factor equation (8.19) is of course not recursive; it is a generalization
of (8.3) in the chapter introduction above. Further, if {βn} is any fixed butarbitrarily chosen binary sequence taking values in {−1, 1} then every realsolution {sn} of the recursive equation
sn = βnan|sn−1 − sn−2| (8.21)
is also a solution of (8.19) since upon taking the absolute value we see that{sn} satisfies Eq. (8.19). This observation shows that the single nonrecursiveequation (8.19) has as many solutions as can be generated by the entire,uncountably infinite class of equations (8.21). Indeed, a large number ofsolutions!
We also point out that from each initial point (x0, x−1) the recursive equa-tion (8.21) has a unique real solution {sn}. It follows that for each one of

246 Form Symmetries and Reduction of Order
the uncountably many sequences βn there is a distinct orbit {(xn, xn−1)} of(8.19) that passes through a given point (x0, x−1). Thus there is a strikinglack of uniqueness for solutions passing through any prescribed point in thestate-space.
A further splitting into lower-order equations. Eq. (8.19), which has ordertwo, also admits a reduction of order as follows. If {tn} is a solution of (8.19)that is never zero for all n then we may divide both sides of (8.19) by |tn−1|to get ∣∣∣∣
tntn−1
∣∣∣∣ = an
∣∣∣∣1 − tn−2
tn−1
∣∣∣∣
where the substitution (analogous to the inversion form symmetry)
rn =tntn−1
yields the first-order difference equation
|rn| = an
∣∣∣∣1 − 1
rn−1
∣∣∣∣ (8.22)
that is related to (8.19) via the (recursive) equation
tn = rntn−1. (8.23)
A discussion of solutions. For illustration, we discuss the solutions of Eq.(8.16) when
an = a is constant and 0 < a < 1 (8.24)
i.e., equation (8.3) in this chapter’s Introduction. We choose Eq. (8.19) forthis discussion rather than (8.22) even though the latter equation has orderone, because (8.22) has a nonempty singularity set among all real numbersand excludes solutions of (8.19) that can equal to zero for some values of n.
First, we consider the nonnegative solutions of (8.19) under conditions(8.24). If tn ≥ 0 for all n then such a sequence {tn} satisfies the recursiveequation
yn = a|yn−1 − yn−2|. (8.25)
Claim: Under conditions (8.24) every solution of (8.25) converges to zero.To prove this claim, it is no loss of generality to assume that y0, y1 ≥ 0 anddefine
µ = max{y0, y1}.We now observe that
y2 = a|y1 − y0| ≤ amax{y0, y1} ≤ aµ,
y3 = a|y2 − y1| ≤ amax{y2, y1} ≤ aµ.

Nonrecursive Equations 247
FIGURE 8.3
A solution of Eq. (8.3) that converges to a 2-cycle.
Further,
y4 = a|y3 − y2| ≤ amax{y3, y2} ≤ a2µ,
y5 = a|y4 − y3| ≤ amax{y4, y3} ≤ a2µ.
This reasoning by induction yields
y2n, y2n+1 ≤ anµ, for all n
and under conditions (8.24) it follows that
limn→∞
yn = 0.
This proves the above claim. From this observation and Eq. (8.20) it followsthat if {tn} is a nonnegative solution of Eq. (8.3) then the correspondingsolution {xn} of (8.16) under conditions (8.24) converges to a 2-cycle as n→∞.
Do all solutions of (8.3) converge to zero? The answer is quickly found tobe negative; indeed, for some values of a ∈ (0, 1) there are binary sequences{βn} in {−1, 1} for which the following special case of equation (8.21) hasnonconverging solutions:
sn = βna|sn−1 − sn−2|. (8.26)
In Figure 8.3 the parameter values
a =1
2, βn = (−1)n+1, s−1 = s0 = 1 (8.27)
generate solutions of (8.26) that converge to the 2-cycle {−1/3, 1/3}.

248 Form Symmetries and Reduction of Order
FIGURE 8.4
An unbounded solution of Eq. (8.3).
If we set a = 0.6 in (8.27) with other parameter values unchanged then thecorresponding solution of (8.26) is unbounded as seen in Figure 8.4 Both ofthese solutions are also solutions of Eq. (8.3).
If the sequence {βn} is aperiodic then there are solutions of (8.3) with morecomplicated behavior. Figures 8.5 and 8.6 illustrate a solution of (8.26) witha = 0.8, initial values s−1 = s0 = 1 and the sequence
βn =
{−1 if rn < 0.451 if rn ≥ 0.45
(8.28)
where the sequence {rn} is the solution of the first-order logistic equationbelow with the given initial value:
rn = 3.75rn−1(1 − rn−1), r0 = 0.4.
Figure 8.6 shows the state-space orbit of the solution in Figure 8.5. Weemphasize that this is also a solution of Eq. (8.3)!
Solutions of (8.26) with the “chaotic” binary sequence {βn} defined by(8.28) depend sensitively on the threshold value in (8.28). For instance, if thisvalue is changed to 0.4 then some solutions may converge to zero while if thethreshold value is changed to 0.5 some solutions appear to be unbounded.
The preceding observations also indicate that the class of solutions of thethird-order equation (8.16) contains a large variety of complicated solutions,even with a constant value a ∈ (0, 1).
We note that equations studied in Example 8.2, namely, (8.16) and (8.19)are of the same quadratic type as Eq. (8.5) in Example 8.1 because (8.16)and (8.19) are equivalent, respectively, to
(xn + xn−1)2 = a2
n(xn−1 − xn−3)2

Nonrecursive Equations 249
FIGURE 8.5
A complicated, nonperiodic solution of Eq. (8.3).
FIGURE 8.6
The state-space orbit of the solution in Figure 8.5.

250 Form Symmetries and Reduction of Order
andt2n = a2
n(tn−1 − tn−2)2.
However, there is also an important difference; each of the equations inExample 8.2 possess real solutions through every point of its state-space butEq. (8.5) may not have solutions through some points in its state-space, i.e,the real plane. Since taking of a general square-root is involved in Example8.1 the existence of a real solution is not always guaranteed. A more detaileddiscussion of quadratic difference equations appears in a later section of thischapter.
The next example illustrates a completely different type of nonrecursiveform than the preceding two examples despite its use of a quadratic differenceequation.
Example 8.3
A nonrecursive equation on the set of positive integers. Consider the second-order difference equation
xnxn−1 = xn−1xn−2 + 2n (8.29)
over the set N0 of all nonnegative integers. Although the operations of ad-dition and multiplication used in (8.29) are inherited from an ambient fieldsuch as Q or R, note that it is not possible to write (8.29) in a recursive form(8.2) in N0. Even collecting terms on one side is not permitted in N0 sincethat requires subtraction and additive inverses.
Splitting into a pair of lower order equations. The substitution tn = xnxn−1
in (8.29) yields the system of first-order equations
tn = tn−1 + 2n,
xnxn−1 = tn.
Both of these equations are well defined on N0 and the first equation above iseasily solved by iteration
tn = n(n + 1) + t0, t0 = x0x−1.
A discussion of solutions. Every solution of (8.29) is a solution of
xnxn−1 = n(n+ 1) + x0x−1 (8.30)
which is easier to work with than (8.29). In particular, if {xn} is a solutionof (8.30) then since xnxn−1 → ∞ as n → ∞ there is a subsequence of {xn}that converges to ∞. Let {xnj
} be such a subsequence. Since for every j thefollowing numbers are integers
xnj−1 =nj(nj + 1)
xnj
+x0x−1
xnj

Nonrecursive Equations 251
it follows that integer solutions of (8.30) are possible if x0x−1 = 0. The equal-ity
x1x0 = x0x−1 + 2
that is implied by either (8.29) or (8.30) shows that x0 6= 0. If x−1 = 0 andx0 > 0 then the same equality implies that x0 = 1 or x0 = 2 for solutions inN0. Each of these two values of x0 yields a valid solution of (8.30) in N0 thatwe can find by simple iteration
x0 = 1 ⇒ xn = n+ 1 for all n ≥ −1,
x0 = 2 ⇒ xn =
{2(n+ 1), if n is even,(n+ 1)/2, if n is odd.
Of the two solutions listed above, the first one can be expressed in N0. Sincethe formula for the second solution involves division by 2 it is meaningful inan ambient field like R rather than N0, a situation that is reminiscent of whatoccurs in linear equations having real coefficients and complex eigenvalues.
The theory discussed in the next section applies to arbitrary sets regardlessof any algebraic structure that may be used to define formulas.
8.2 Form symmetries, factors, and cofactors
In this section we define the concepts of order-reducing form symmetry andthe associated factorization for Eq. (8.1) on an arbitrary set S. In analogy tosemiconjugate factorizations, we seek a decomposition of Eq. (8.1) into a pairof difference equations of lower orders. A factor equation of type
φn(tn, tn−1, . . . , tn−m) = ψn(tn, tn−1, . . . , tn−m), 1 ≤ m ≤ k − 1 (8.31)
may be derived from (8.1) where φn, ψn : Sm+1 → S for all n if there is asequence of mappings Hn : Sk+1 → Sm+1 such that
fn = φn ◦Hn and gn = ψn ◦Hn (8.32)
for all n ≥ 1. If we denote
Hn(u0, . . . , uk) = [h0,n(u0, . . . , uk), h1,n(u0, . . . , uk), . . . , hm,n(u0, . . . , uk)]
then for each solution {xn} of Eq. (8.1)
φn(h0,n(xn, . . . , xn−k), h1,n(xn, . . . , xn−k), . . . , hm,n(xn, . . . , xn−k)) =
ψn(h0,n(xn, . . . , xn−k), h1,n(xn, . . . , xn−k), . . . , hm,n(xn, . . . , xn−k))

252 Form Symmetries and Reduction of Order
In order for a sequence {tn} in S defined by the substitution
tn = h0,n(xn, . . . , xn−k)
to be a solution of (8.31), the functions Hn must have a special form thatis defined next. A review of the discussion in Section 3.2 may be helpful inunderstanding the motivation for the next definition.
DEFINITION 8.1 A sequence of functions {Hn} is an order-reducingform symmetry of Eq. (8.1) on a nonempty set S if there is an integerm, 1 ≤ m < k, and sequences of functions φn, ψn : Sm+1 → S and hn :Sk−m+1 → S such that
Hn(u0, . . . , uk) = [hn(u0, . . . , uk−m), hn−1(u1, . . . , uk−m+1), (8.33)
. . . , hn−m(um, . . . , uk)] (8.34)
and the sequences {φn}, {ψn}, {fn}, {gn} and {Hn} satisfy the relations (8.32)for all n ≥ 1.
REMARK 8.1 The reader may ask why in (8.32) we used the same Hn
for both fn and gn. Well, if we define
gn = ψn ◦H ′n, H ′
n : Sk+1 → Sl+1 , ψn : Sl+1 → S
where the integer l may be different from m then the factor equation is notproperly defined. For a solution {xn} of (8.1), we obtain
φn(h0,n(xn, . . . , xn−k), h1,n(xn, . . . , xn−k), . . . , hm,n(xn, . . . , xn−k)) =
ψn(h′0,n(xn, . . . , xn−k), h′1,n(xn, . . . , xn−k), . . . , h
′l,n(xn, . . . , xn−k))
which after the substitutions
tn = hn(xn, . . . , xn−k+m), sn = h′n(xn, . . . , xn−k+l)
in the format defined by (8.33) yields
φn(tn, tn−1, . . . , tn−m) = ψn(sn , sn−1, . . . , sn−l) (8.35)
as the potential factor equation. This is clearly problematic since the aboveequation does not define a difference equation like (8.1) unless one of tn or sn
can be expressed as a function of the other, i.e., there is a common, lower-dimensional form symmetry that allows us to reduce (8.35) to a single variabletn, sn or third variable that has even lower dimension. This further substitu-tion reduces H ′
n and/or Hn to a single, lower-dimensional form symmetry as
in (8.32).

Nonrecursive Equations 253
If S = (G, ∗) is a group, then the notion of form symmetry in Definition8.1 generalizes the recursive form symmetry in Definition 7.1 where the com-ponents of Hn are defined as
hn−j(uj, . . . , uk−m+j) = uj ∗ hn−j(uj+1, . . . , uk−m+j), j = 0, 1, . . . , m.
We have the following basic factorization theorem for nonrecursive differ-ence equations.
THEOREM 8.1
Assume that Eq. (8.1) has an order-reducing form symmetry {Hn} defined by(8.33) on a nonempty set S. Then the difference equation (8.1) has a factor-ization into an equivalent system of factor and cofactor equations
φn(tn, . . . , tn−m) = ψn(tn, . . . , tn−m) (8.36)
hn(xn, . . . , xn−k+m) = tn (8.37)
whose orders m and k −m respectively, add up to the order of (8.1).
PROOF To show the equivalence, we show that for each solution {xn}of (8.1) there is a solution {(tn, yn)} of the system of equations (8.36), (8.37)such that yn = xn for all n ≥ 1 and conversely, for each solution {(tn, yn)} ofthe system of equations (8.36) and (8.37) the sequence {yn} is a solution of(8.1).
First assume that {xn} is a solution of Eq. (8.1) through a given initialpoint (x0, x−1, . . . , x−k+1) ∈ Gk+1. Define the sequence {tn} in S as in (8.37)for n ≥ −m+ 1 so that by (8.32)
φn(tn, . . . , tn−m) = φn(hn(xn, . . . , xn−k+m), . . . , hn−m(xn−m, . . . , xn−k))
= φn(Hn(xn, . . . , xn−k))
= fn(xn, . . . , xn−k)
= gn(xn, . . . , xn−k)
= ψn(Hn(xn, . . . , xn−k))
= ψn(tn, . . . , tn−m).
It follows that {tn} is a solution of (8.36). Further, if yn = xn for n ≥ −k+mthen by the definition of tn, {yn} is a solution of (8.37).
Conversely, let {(tn, yn)} be a solution of the factor-cofactor system (8.36),(8.37) with initial values
t0, . . . , t−m+1, y−m, . . . y−k+1 ∈ G.
We note that y0, y−1, . . . , y−m+1 satisfy the equations
hj(yj , . . . , yj−k+m) = tj, j = 0,−1, . . . ,−m+ 1.

254 Form Symmetries and Reduction of Order
Now for n ≥ 1, (8.32) implies
fn(yn, . . . , yn−k) = φn(Hn(yn , . . . , yn−k))
= φn(hn(yn, . . . , yn−k+m), . . . , hn−m(yn−m, . . . , yn−k))
= φn(tn, . . . , tn−m)
= ψn(tn, . . . , tn−m)
= ψn(Hn(xn, . . . , xn−k))
= gn(xn, . . . , xn−k).
Therefore, {yn} is a solution of (8.1).
Order-reduction types for nonrecursive equations can be defined as before.
DEFINITION 8.2 If Eq. (8.40) has the factorization consisting of equa-tions (8.36) and (8.37) then it is said to have a type-(m, k−m) reductionin order.
Example 8.4
Let S be the set (0,∞) which under ordinary addition is a semigroup. Foreach a ∈ S and m ∈ {1, 2, 3, . . .} we may define ma = a + · · ·+ a (adding mtimes) without introducing the field operations. Thus if m0 , m1, m2 are givenpositive integers and {cn} is any sequence of positive real numbers then thethird-order difference equation
m0xn +m1xn−1 +m2xn−2 +m3xn−3 = cn (8.38)
is well defined in the additive semigroup (0,∞). To obtain a type-(2, 1) re-duction of order for (8.38) consider a form symmetry
H(u0, u1, u2, u3) = [h(u0, u1), h(u1, u2), h(u2, u3)]
whereh(u, v) = u+ µv, µ ∈ {1, 2, 3, . . .}.
If
fn(u0, u1, u2, u3) = m0u0 +m1u1 +m2u2 +m3u3,
gn(u0, u1, u2, u3) = cn
then based on the way these functions defined, we consider factor-functionsequences φn, ψn : S3 → S
φn(v1, v2, v3) = l1v1 + l2v2 + l3v3, l1, l2, l3 ∈ {1, 2, 3, . . .},ψn(v1, v2, v3) = cn.

Nonrecursive Equations 255
To satisfy the relations in (8.32) it is necessary that
l1(u0 + µu1) + l2(u1 + µu2) + l3(u2 + µu3) = m0u0 +m1u1 +m2u2 +m3u3
for all u0, u1, u2, u3 > 0. By matching the coefficients of u0, u1, u2, u3 on bothsides, this condition implies the following statements:
l1 = m0, l1µ+ l2 = m1, l2µ+ l3 = m2, l3µ = m3. (8.39)
If there are positive integers µ, l1, l2, l3 satisfying conditions (8.39) then afactorization of (8.38) exists within the semigroup (0,∞) as follows:
l1tn + l2tn−1 + l3tn−2 = cn,
xn + µxn−1 = tn.
Equations listed in (8.39) may be solved in the field of real numbers usingthe usual algebraic operations. Of course, we seek solutions that are positiveintegers. From (8.39) we find that if the cubic polynomial equation
m0µ3 −m1µ
2 +m2µ−m3 = 0.
has a positive integer solution µ then
l1 = m0, l2 = m1 −m0µ, l3 = m2 − µl2 =m3
µ.
If furthermore m1 > m0µ and m2 > µ(m1 −m0µ) then l1, l2, l3 are positiveintegers and we have a valid solution of (8.39) in (0,∞). For instance, ifm0 = 1, m1 = 3, m2 = 3 and m3 = 1 then µ = 1 is a root of the cubicequation above and we calculate l1 = 1, l2 = 2 and l3 = 1. It is worth notingthat in this case the factor equation
tn + 2tn−1 + tn−2 = cn
once again has the form symmetry h(u0, u1) = u0 + u1 (i.e., µ = 1) and afactorization into two first-order equations
rn + rn−1 = cn,
tn + tn−1 = rn.
8.3 Semi-invertible map criterion
A group structure is necessary for obtaining certain results such as an exten-sion of the useful invertible map criterion to nonrecursive equations. In this

256 Form Symmetries and Reduction of Order
section and the rest of this chapter, we assume that S = (G, ∗) is a nontrivialgroup unless otherwise stated. Denoting the identity of G by ι, the differenceequation (8.1) can be written in the equivalent form
En(xn, xn−1, . . . , xn−k) = ι, k ≥ 2, n = 1, 2, 3, . . . (8.40)
where En = fn ∗ [gn]−1 (the brackets indicate group inversion is involved,rather than map inversion). Our aim in this section is to obtain an extensionof the useful invertible map criterion of Sections 5.1 and 7.2 to the nonrecursiveequation (8.40). Using this extension we obtain various form symmetries thatlead to type-(k − 1, 1) order reductions, analogously to the recursive cases inChapter 5.
A type-(k − 1, 1) reduction of Eq. (8.40) is characterized by the followingfactorization
φn(tn, . . . , tn−k+1) = ι (8.41)
hn(xn, xn−1) = tn (8.42)
in which the cofactor equation has order one. This system occurs if thefollowing is a form symmetry of (8.40):
Hn(u0, . . . , uk) = [hn(u0, u1), hn−1(u1, u2), . . . , hn−k+1(uk−1, uk)]. (8.43)
A specific example of the above factorization is the system of equations (8.7)and (8.8) in Section 8.1 that factor Eq. (8.5). More examples are discussedbelow.
The following type of coordinate function hn is of particular interest in thissection.
DEFINITION 8.3 A coordinate function h : G2 → G on a nontrivialgroup G is separable if
h(u, v) = µ(u) ∗ θ(v)
for given self-maps µ, θ of G into itself. A separable h is right semi-invertibleif θ is a bijection and left semi-invertible if µ is a bijection. If both θ and µare bijections then h is semi-invertible. A form symmetry {Hn} is (right,left) semi-invertible if the coordinate function hn is (right, left) semi-invertiblefor every n.
Note that a semi-invertible h is not a bijection in general, as the nextexample shows.
Example 8.5
(a) Consider the linear map h(u, v) = u − v on R which is separable relativeto ordinary addition with µ(u) = u and θ(v) = −v. Since both µ and θ are

Nonrecursive Equations 257
bijections of R, the function h is semi-invertible. However, h is not a bijectionsince h(a, a) = 0 for all a.
(b) The function h(u, v) = u2 − v is right semi-invertible but not left semi-invertible on R because the function µ(u) = u2 is not a bijection of R.
Clearly, functions of type u ∗ h(v) where h is a bijection are semi-invertiblefunctions. Therefore, semi-invertible functions generalize the types of mapsdiscussed previously in Sections 5.1 and 7.2. The invertible map criteriondiscussed in those sections also extends to all right semi-invertible form sym-metries; this is established in the next theorem which is extends Theorem 7.2to nonrecursive equations.
THEOREM 8.2
(Semi-invertible map criterion) Assume that hn(u, v) = µn(u) ∗ θn(v) is asequence of right semi-invertible functions with bijections θn of a group G.For arbitrary u0, v1, . . . , vk ∈ G define ζ0,n ≡ u0 and for j = 1, . . . , k
ζj,n(u0, v1, . . . , vj) = θ−1n−j+1([µn−j+1(ζj−1,n(u0, v1, . . . , vj−1))]
−1∗vj) (8.44)
with the usual distinction observed between map inversion and group inversion.Then Eq. (8.40) has the form symmetry (8.43) and the associated factoriza-tion into equations (8.41) and (8.42) if and only if the following quantity
En(u0, ζ1,n(u0, v1), . . . , ζk,n(u0, v1, . . . , vk)) (8.45)
is independent of u0 for all n. In this case, the factor functions φn are givenby
φn(v1, . . . , vk) = En(u0, ζ1,n(u0, v1), . . . , ζk,n(u0, v1, . . . , vk)). (8.46)
PROOF Assume that the quantity in (8.45) is independent of u0 for everyn. Then the functions φn in (8.46) are well defined and ifHn is given by (8.43)and vj+1 = hn−j(uj, uj+1) for j = 0, . . . , k− 1 in (8.44) then
φn(Hn(u0, . . . , uk)) = φn(hn(u0, u1), hn−1(u1, u2), . . . , hn−k+1(uk−1, uk))
= En(u0, ζ1,n(u0, hn(u0, u1)), . . . ,
ζk,n(u0, hn(u0, u1), . . . , hn−k+1(uk−1, uk)).
Now, observe that
ζ1,n(u0, hn(u0, u1)) = θ−1n ([µn(u0)]
−1 ∗ µn(u0) ∗ θn(u1)) = u1.
By way of induction, assume that for j < k
ζj,n(u0, hn(u0, u1), . . . , hn−j+1(uj−1, uj)) = uj (8.47)

258 Form Symmetries and Reduction of Order
and note that
ζj+1,n(u0, . . . , hn−j(uj, uj+1)) = θ−1n−j([µn−j(ζj,n(u0, . . . , hn−j+1(uj−1, uj)))]
−1
∗µn−j(uj) ∗ θn−j(uj+1))
= θ−1n−j([µn−j(uj)]
−1 ∗ µn−j(uj) ∗ θn−j(uj+1))
= uj+1.
It follows that (8.47) is true for all j = 0, 1, . . . , k and thus
φn(Hn(u0, . . . , uk)) = En(u0, . . . , uk)
i.e., {Hn} as defined by (8.43) is a form symmetry of Eq. (8.40) and there-fore Theorem 8.1 implies the existence of the associated factorization intoequations (8.41) and (8.42).
Conversely, suppose that {Hn} as defined by (8.43) is a form symmetry ofEq. (8.40). Then there are functions φn such that for all u0, v1, . . . , vk ∈ G
En(u0, ζ1,n, . . . , ζk,n) = φn(Hn(u0, ζ1,n, . . . , ζk,n))
= φn(hn(u0, ζ1,n), . . . , hn−k+1(ζk−1,n, ζk,n))
where ζj,n = ζj,n(u0, v1, . . . , vj) for j = 1, . . . , k. Since
hn−j+1(ζj−1,n, ζj,n) = µn−j+1(ζj−1,n) ∗ θn−j+1(ζj,n)
= µn−j+1(ζj−1,n) ∗ θn−j+1(θ−1n−j+1([µn−j+1(ζj−1,n)]−1 ∗ vj))
= µn−j+1(ζj−1,n) ∗ [µn−j+1(ζj−1,n)]−1 ∗ vj
= vj
it follows that En(u0, ζ1,n, . . . , ζk,n) is independent of u0 for all n, as stated.
If {Hn} is a semi-invertible (right and left) form symmetry of Eq. (8.40)then the following result states that the cofactor equation (8.42) can be ex-pressed in recursive form.
COROLLARY 8.1
Assume that the functions hn in Theorem 8.2 are semi-invertible so that bothµn and θn are bijections. Then Eq. (8.40) has the following factorization
φn(tn, . . . , tn−k+1) = ι
xn = µ−1n (tn ∗ [θn(xn−1)]
−1)
in which the cofactor equation is recursive.
Special choices of µn and θn give analogs of the identity, inversion and linearform symmetry that we discussed in Chapter 5. In particular, if θn is linear

Nonrecursive Equations 259
for all n then the selection
µn(u) = u2, θn(v) = −bv
gives the cofactor equation (8.8) in Section 8.1. More generally, if {an}, {bn}and {cn} are sequences in a field F then the difference equation
x2n − anx
2n−1 − bnxn−1 + anbn−1xn−2 = cn (8.48)
can be factored as
tn = antn−1 + cn
x2n − bnxn−1 = tn.
Difference equations such as (8.48) which consist only of polynomial termsof degree one and two make up a significant class of difference equations thatlie just beyond the linear equations. We discuss these “quadratic equations”and the challenges that their factorizations pose more methodically in thenext section.
8.4 Quadratic difference equations
In Section 7.4 we showed that a linear difference equation
xn + a1,nxn−1 + · · ·+ ak,nxn−k = bn
has a SC factorization over a field F if a solution of the homogeneous partexisted that was never zero (equivalently, if the associated Riccati equation oflower order had a solution).
A natural generalization of the linear equation is the quadratic differenceequation over a field F
k∑
i=0
k∑
j=i
ai, j,nxn−ixn−j +
k∑
j=0
bj,nxn−j = cn (8.49)
that is defined by the quadratic expression
En(u0, u1, . . . , uk) =
k∑
i=0
k∑
j=i
ai, j,nuiuj +
k∑
j=0
bj,nuj − cn.
Linear equations may be viewed as degenerate special cases of quadraticones where ai, j,n = 0 for all i, j, n. When discussing Eq. (8.49) we implicitlyassume that
There is j ∈ {0, 1, . . . , k} such that a0, j,n 6= 0 for all n (8.50)

260 Form Symmetries and Reduction of Order
although this restriction is not the weakest possible for preserving quadraticterms (see Example 8.9 below for an equation that violates the above conditionbut satisfies a weaker one). Condition (8.50) leads to the following terminologyin classifying quadratic difference equations.
DEFINITION 8.4 The quadratic difference equation (8.49) is improperor degenerate if its coefficients do not satisfy Condition (8.50).
Equations of type (8.49) under Condition (8.50) also include the familiarrational recursive equations of type
xn =−∑k
i=1
∑kj=i ai, j,nxn−ixn−j −
∑kj=1 bj,nxn−j + cn
∑kj=1 a0, j,nxn−j + b0,n
(8.51)
as a special case witha0,0,n = 0 for all n. (8.52)
These rational equations have been studied extensively; see the Notes sec-tion of this chapter. As seen in Section 5.6.5, their solutions in some casesexhibit a rich variety of qualitatively different behaviors. We note that allsolutions of (8.51) are also solutions of the quadratic (8.49) when condition(8.52) is satisfied.
In particular, Ladas rational difference equations are among extensivelystudied special cases of (8.51) in which no quadratic terms are present in thenumerator, i.e., when ai, j,n = 0 for all i, j, n.
Other special cases of (8.51) include recursive polynomial equations thatoccur when a0, j,n = 0 for all j = 1, 2, . . . , k and all n ≥ 1 but b0,n arenonzero. Well known examples include the Henon difference equation
xn = a+ bxn−2 − x2n−1
and the logistic equation with delay
xn = xn−1(a− bxn−2 − xn−1)
that generalizes the familiar one-dimensional logistic map.Unlike the linear case, the existence of a factorization for Eq. (8.49) is not
clear and in general, finding any factorization into lower order equations is achallenging problem. On the other hand, the examples discussed in Section8.1 had factorizations that could be found easily; therefore, special cases of(8.49) may be amenable to analysis; see, e.g., Corollary 8.6.
REMARK 8.2 The nature of the field F is important to the factorizationproblem. For instance, if F = Z2 then all quadratic expressions withoutmixed terms reduce to linear ones since for all u ∈ Z2, u = 0 or u = 1 so that

Nonrecursive Equations 261
u2 = u. In particular, on the field Z2 Eq. (8.5) in Section 8.1 reduces to thenonhomogeneous linear equation
xn = (a+ b)xn−1 + abxn−2 + c
whose factorization has already been discussed.
8.4.1 Existence and variety of real solutions
Before proceeding further with our main discussion, i.e., factorizations andreductions of orders, it is helpful to consider the existence of solutions for thequadratic difference equation (8.49). In this section, we consider this issue forthe case F = R, i.e., when all coefficients and parameters are real numbers.Real solutions are important in both applied modeling and in numerical sim-ulations and offer substantial insights into the nature of the problem withouttechnical or structural issues that may arise with regard to the existence ofsquare-roots in other fields.
As noted above, if a0,0,n = 0 for all but finitely many n then under Condition(8.50) there is a unique recursive equation, namely, (8.51) that is equivalent to(8.49). The existence of solutions in this case depends on the singularity setof (8.51), i.e., the set of initial values that result in a zero denominator aftera finite number of iterations; see, e.g., Section 5.4 on the Riccati differenceequation.
In this section, we assume that
a0,0,n 6= 0 for all n (8.53)
as this represents a new and substantially different case and also ensuresthat the quadratic difference equation is not improper. Although Condition(8.50) is satisfied in this case, the quadratic difference equation does not havea unique recursive form and direct iteration is not possible. But an ideadiscussed in Examples 8.1 and 8.2 can be used to study the existence ofsolutions for nonrecursive quadratic equations satisfying (8.53). In this sectionwe obtain conditions implying the existence of real solutions for (8.49) whenall coefficients and parameters are real and (8.53) holds.
Before considering the general case, it is instructive to discuss the followingspecial case.
LEMMA 8.1
Consider the second-order, quadratic difference equation
x2n = Qn(xn−1, . . . , xn−k) (8.54)

262 Form Symmetries and Reduction of Order
where {Qn} is a sequence of quadratic functions
Qn(u1, . . . , uk) =
k∑
i=1
k∑
j=i
ai,j,nuiuj +
k∑
j=1
bj,nuj + cn
in which all the coefficients ai,j,n, bj,n, cn are real numbers, not all zeros. Then{xn} is a real solution of (8.54) if and only if {xn} is a real solution of somemember of the family of recursive equations
sn = βn
√Qn(sn−1, . . . , sn−k) (8.55)
where {βn} is a binary sequence with values in the set {−1, 1}.
PROOF Let {xn} be a real solution of the recursive equation (8.55) witha given binary sequence {βn}. Then
xn = βn
√Qn(xn−1, . . . , xn−k) (8.56)
for all n and squaring both sides of the above equation shows that {xn}satisfies (8.54).
Conversely, let {xn} be a real solution of (8.54). For n = 1
x21 = Q1(x0, . . . , x−k+1)
Since x1 is real, the square-root of the right-hand side of above equality isreal. Therefore, for β1 ∈ {−1, 1} (depending on the sign of x1)
x1 = β1
√Q1(x0, . . . , x−k+1).
Continuing in this way for n = 2, 3, . . . a binary sequence {βn} is definedfor which (8.56) holds. For this binary sequence {βn}, {xn} is evidently a
solution of (8.55).
REMARK 8.3 (Recursive class) The set of equations (8.55) may be calledthe recursive class of the nonrecursive equation (8.54). We use the termrecursive class intuitively in this book rather than give a formal definition.The recursive class in Lemma 8.1 is an uncountable set and further, everysolution of each equation in the recursive class is also a valid solution of (8.54).The “if and only if” statement in Lemma 8.1 implies that the recursive class ofequations (8.55) for all {βn} is equivalent to the nonrecursive equation (8.54)in the sense that every solution of (8.54) is also a solution of some equation
in its recursive class.
Lemma 8.1 applies to (8.5) and (8.19) as has already been pointed out inExamples 8.1 and 8.2. We now give another example.

Nonrecursive Equations 263
Example 8.6
Let us find the real solutions of the following quadratic difference equationwithout mixed-product terms
x2n + x2
n−1 + x2n−2 = 1. (8.57)
To assure the existence of real solutions of Eq. (8.57), let x0, x−1 ∈ [−1, 1]such that
x20 + x2
−1 ≤ 1.
This is equivalent to choosing an initial point in the unit disk in R2 andexamining the orbits containing this point. To simplify notation, set
x0 = a, x−1 = b with a2 + b2 ≤ 1.
Writing (8.57) in the form (8.54), consider the recursive difference equation
sn = βn
√1− s2n−1 − s2n−2, s0 = x0, s−1 = x−1 (8.58)
where {βn} is a given though arbitrarily chosen binary sequence in {−1, 1}.Note that
s1 = β1
√1 − (a2 + b2) ∈ [−1, 1]
is real; similarly
s2 = β2
√1 − s21 − s20 = β2
√1 − 1 + a2 + b2 − a2 = β2|b| ∈ [−1, 1]
s3 = β3
√1 − s22 − s21 = β3
√1 − b2 − 1 + a2 + b2 = β3|a| ∈ [−1, 1].
Further iteration generates a sequence {sn} with a general form
{b, a, β1
√1 − (a2 + b2), . . . , β3n−1|b|, β3n|a|, β3n+1
√1 − (a2 + b2), . . .
}
(8.59)with n ≥ 1 that is a solution of (8.58) and its orbit is in the closed unit diskin R2.
The set of all equations of type (8.58) for every possible binary sequence{βn} is the recursive class of (8.57). The sequence (8.59) provides significantinsight into the nature of the real solutions of (8.57) becuase it shows thatthe sequence {βn} essentially determines the behavior of the real solutions of(8.57). For example, if {βn} is periodic then so is (8.59). In particular, forthe case βn = 1 for all n (i.e., the positive square-root case) (8.59) is periodicwith period three except in the case described next.
A special class of solutions of (8.57) are obtained from its constant solutions.Setting all variables in (8.57) equal to a common value u and solving we get
3u2 = 1 ⇒ u = ± 1√3.

264 Form Symmetries and Reduction of Order
By direct substitution is it easy to see that the sequence
{βn√
3
}∞
n=1
(8.60)
is a solution of (8.57) for every binary sequence {βn} with values in the set{−1, 1}. Also note that (8.60) may also be obtained from (8.59) with a = b =1/
√3. It is evident from (8.60) that (8.57) has real periodic solutions of all
possible periods as well as bounded, nonperiodic solutions!
It is worth noting that Eq. (8.57) has a factorization that is easy to find.The substitution
yn = x2n (8.61)
transforms (8.57) into the nonhomogeneous linear equation
yn + yn−1 + yn−2 = 1.
After factoring the linear equation as discussed in previous chapters, wemay substitute xn back using (8.61) to obtain a factorization of (8.57) intotwo first-order equations. A generalization of this idea, namely, using an order-preserving form symmetry such as (8.61) to transform a nonlinear equationinto a linear one, is discussed later in this chapter; see Remark 8.5. In Example8.14 we obtain another formula for the solutions of (8.57) using the classicaltheory of linear equations. This formula is equivalent to (8.59) but not asclearly descriptive of the nature of solutions.
In the next example we determine the recursive class and the nature ofsolutions of a quadratic equation containing mixed terms. In this case wecannot rely on linear equations to simplify our task.
Example 8.7
Let a, b, c be real numbers such that
a 6= 0 and b, c > 0. (8.62)
Let us find the recursive class of the quadratic equation
x2n = axnxn−1 + bx2
n−2 + c. (8.63)
This equation also belongs to the class of quadratic difference equationsdiscussed in Corollary 8.3 below. We solve for the term xn by completing thesquares:
x2n − axnxn−1 +
a2
4x2
n−1 =a2
4x2
n−1 + bx2n−2 + c
(xn − a
2xn−1
)2
=a2
4x2
n−1 + bx2n−2 + c.

Nonrecursive Equations 265
Now as in Example 8.6 we may take the square root using binary sequencesfor completeness
xn − a
2xn−1 = βn
√a2
4x2
n−1 + bx2n−2 + c
xn =a
2xn−1 + βn
√a2
4x2
n−1 + bx2n−2 + c (8.64)
where {βn} is any given sequence with βn ∈ {−1, 1} chosen arbitrarily forevery n. The recursive class of (8.63) is the set of all equations of type (8.64)for all possible binary sequences {βn}.
Under conditions (8.62), for each fixed sequence {βn} every solution of therecursive equation (8.64) with real initial values is real because the quantityunder the square root is always nonnegative. Furthermore, since
√a2
4x2
n−1 + bx2n−2 + c >
∣∣∣a
2xn−1
∣∣∣
it follows that for each n,
xn > 0 if βn = 1,
xn < 0 if βn = −1.
This sign-switching implies that a significant variety of oscillating solutionsare possible for Eq. (8.63) under conditions (8.62). Indeed, since βn is chosenarbitrarily, for every sequence of positive integers
{m1, m2, m3, . . .}
there is a solution of (8.63) that starts with positive values of xn for m1 termsby setting βn = 1 for 1 ≤ n ≤ m1. Then xn < 0 for the next m2 terms withβn = −1 for n in the range
m1 + 1 ≤ n ≤ m1 +m2
and so on with the sign of xn switching according to the sequence {mn}.Figure 8.7 illustrates this situation with parameter values
a = 0.6, b = 0.5, c = 1, x−1 = x0 = 1
βn =
{1, if sin(n/3) + cos(n
√2/3) > 0
−1, otherwise.
The method of completing the square discussed in Example 8.7 can beused to determine the recursive class of every quadratic difference equation.

266 Form Symmetries and Reduction of Order
FIGURE 8.7
Oscillation of a solution xn is determined by the oscillation pattern of thebinary sequence βn.
This useful feature enables the calculation of solutions of quadratic equationsthrough iteration, a feature that is not shared by nonrecursive difference equa-tions in general. The next result extends Lemma 8.1 to the general quadraticcase.
LEMMA 8.2
Consider the quadratic difference equation
k∑
i=0
k∑
j=i
ai,j,nxn−ixn−j +
k∑
j=0
bj,nxn−j + cn = 0 (8.65)
in which all the coefficients ai,j,n, bj,n, cn are real numbers with a0,0,n 6= 0for all n. Then {xn} is a real solution of (8.65) if and only if {xn} is a realsolution of some member of the family of recursive equations, namely, therecursive class of (8.65)
sn = Ln(sn−1, . . . , sn−k) + βn
√L2
n(sn−1, . . . , sn−k) +Qn(sn−1, . . . , sn−k)(8.66)
where {βn} is a fixed but arbitrarily chosen binary sequence with values in the

Nonrecursive Equations 267
set {−1, 1} and for each n,
Ln(u1, . . . , uk) =−1
2a0,0,n
b0,n +k∑
j=1
a0,j,nuj
, (8.67)
Qn(u1, . . . , uk) =−1
a0,0,n
k∑
i=1
k∑
j=i
ai,j,nuiuj +k∑
j=1
bj,nuj + cn
. (8.68)
PROOF If
En(u0, u1, . . . , uk) =
k∑
i=0
k∑
j=i
ai,j,nuiuj +
k∑
j=1
bj,nuj + cn
then using definitions (8.67) and (8.68) we may write
En(u0, u1, . . . , uk) = a0,0,n[x2n − 2Ln(u1, . . . , uk)xn −Qn(u1, . . . , uk)] (8.69)
Since a0,0,n 6= 0 for all n, the solution set of (8.65) is identical to the solutionset of
x2n − 2Ln(u1, . . . , uk)xn −Qn(u1, . . . , uk) = 0. (8.70)
Completing the square in (8.70) gives
[xn − Ln(u1, . . . , uk)]2 = L2n(u1, . . . , uk) +Qn(u1, . . . , uk).
Now, arguing as in Lemma 8.1, this equation is equivalent to (8.66).
Example 8.7 provides a quick illustration of the preceding result with
L(u1, u2) = −a2u1, Q(u1, u2) = bu2
2 + c
where Ln = L and Qn = Q are independent of n. Similarly, in Example 8.6we have
L(u1, u2) = 0, Q(u1, u2) = 1 − u21 − u2
2.
We are now ready to present the existence theorem for real solutions of(8.65). Let {βn} be a fixed but arbitrarily chosen binary sequence in {−1, 1}and define the functions Ln andQn as in Lemma 8.2. Further, let the functionson the right-hand side of (8.66) be labeled fn, i.e.,
fn(u1, . . . , uk) = Ln(u1, . . . , uk) + βn
√L2
n(u1, . . . , uk) +Qn(u1, . . . , uk).(8.71)
These functions on Rk unfold to the self-maps
Fn(u1, . . . , uk) = (fn(u1, . . . , uk), u1, . . . , uk−1) .

268 Form Symmetries and Reduction of Order
We emphasize that each function sequence {Fn} is determined by a given orfixed binary sequence {βn} as well as the function sequences {Ln} and {Qn}that are given by (8.65). Clearly the functions fn are real-valued at a point(u1, . . . , uk) ∈ Rk if and only if
L2n(u1, . . . , uk) +Qn(u1, . . . , uk) ≥ 0. (8.72)
In what follows, we denote the set of all points in Rk for which inequality(8.72) holds by S; i.e.,
S =
∞⋂
n=0
{(u1, . . . , uk) ∈ Rk : L2
n(u1, . . . , uk) +Qn(u1, . . . , uk) ≥ 0}. (8.73)
THEOREM 8.3
Assume that the set S defined by (8.73) is nonempty.(a) The quadratic difference equation (8.65) has a real solution {xn}∞n=−k+1
if and only if the point P0 = (x0, x−1, . . . , x−k+1) is in S and there is a binarysequence {βn} in {−1, 1} such that the forward orbit of P0 under the associatedmaps {Fn} is contained in S; i.e.,
{Fn ◦ Fn−1 ◦ · · · ◦ F1(P0)}∞n=1 ⊂ S.
(b) If the maps {Fn} have a nonempty invariant set M ⊂ S for all n, i.e.,
Fn(M) ⊂M ⊂ S
then the quadratic difference equation (8.65) has real solutions.
PROOF (a) By Lemma 8.2, {xn}∞n=−k+1 is a real solution of (8.65) if andonly if there is a binary sequence {βn} in {−1, 1} such that {xn}∞n=−k+1 isa real solution of the recursive equation (8.66). Using the notation in (8.71),Eq. (8.66) can be written as
sn = fn(sn−1, . . . , sn−k). (8.74)
Now the forward orbit of the solution {xn}∞n=−k+1 of (8.74) in the state-space is the sequence
O = {Fn ◦ Fn−1 ◦ · · · ◦ F1(P0)}∞n=1 = {(xn−1, . . . , xn−k)}∞n=1
in Rk that starts from P0 ∈ S. It is clear from the definition of S that eachxn is real if and only if O ⊂ S. This observation completes the proof of (a).
(b) Let P0 ∈M. Then {Fn ◦ Fn−1 ◦ · · · ◦ F1(P0)}∞n=1 ⊂M ⊂ S so by (a)
{(xn−1, . . . , xn−k)}∞n=1 ⊂ S.

Nonrecursive Equations 269
It follows that each xn is real and thus, {xn}∞n=−k+1 is a solution of (8.74).An application of Lemma 8.2 completes the proof.
The next definition is motivated by the above result. We note that if Shas any invariant subset M = M({βn}) (relative to some binary sequence{βn} in {−1, 1} or equivalently, some map sequence {Fn}) then the union ofall such invariant sets in S is again invariant relative to all relevant binarysequences {βn} (or map sequences {Fn}). Invariant sets may exist (i.e., theyare nonempty) for some binary sequences {βn} in {−1, 1} and not others.However, the union of all invariant sets,
M =⋃
{M({βn}) : {βn} is a binary sequence in {−1, 1}}
is the largest or maximal invariant set in S and as such, M is unique. Inparticular, if S is invariant relative to some binary sequence then M = S.
DEFINITION 8.5 The largest invariant subset M of S is the state-space of real solutions of the quadratic equation (8.65).
REMARK 8.4 The ambient set S defined by (8.73) contains the orbits ofall real solutions of Eq. (8.65) by Theorem 8.3. Hence, a necessary conditionfor the existence of real solutions for the quadratic equation is that S benonempty. Of course, S may be empty in some cases, e.g.,
x2n + x2
n−1 + x2n−2 + 1 = 0
where
S = {(u, v) ∈ R2 : −u2 − v2 − 1 ≥ 0} = ∅.
In cases such as the above, Eq. (8.65) obviously has no real solutions.
The existence of a state-space M may signal the occurrence of a varietyof solutions for (8.65). In Example 8.7, where S = R2 is trivially invariant(so that M =R2) we observed the occurrence of a wide variety of oscillatorybehaviors. Generally, when S = Rk every solution of (8.65) with its initialpoint P0 ∈ Rk is a real solution. The next result presents sufficient conditionsthat imply S = Rk.
COROLLARY 8.2
The state-space of real solutions of (8.65) is Rk if the following conditions

270 Form Symmetries and Reduction of Order
hold for all n:
Aj,n > 0, Bi,j,n = 0, (8.75)
k∑
j=1
C2j,n
Aj,n≤ b20,n − 4a0,0,ncn (8.76)
where for k ≥ 2, j = 1, . . . , k, and n ≥ 0
Aj,n = a20,j,n − 4a0,0,naj,j,n,
Bi,j,n = a0,i,na0,j,n − 2a0,0,nai,j,n, i < j,
Cj,n = a0,j,nb0,n − 2a0,0,nbj,n.
PROOF By straightforward calculation the inequality L2n +Qn ≥ 0, i.e.,
(8.72) is seen to be equivalent to
k∑
j=1
Aj,nu2j + 2
k−1∑
i=1
k∑
j=i+1
Bi,j,nuiuj + 2
k∑
j=1
Cj,nuj + b20,n ≥ 4a0,0,ncn (8.77)
for all (u1, . . . , uk) ∈ Rk with the coefficients Aj,n, Bi,j,n and Cj,n as definedin the statement of the corollary. By conditions (8.76) the double summationterm in (8.77) drops out and we may complete the squares in the remainingterms to obtain the inequality
k∑
j=1
Aj,n
(uj +
Cj,n
Aj,n
)2
≥k∑
j=1
C2j,n
Aj,n− b20,n + 4a0,0,ncn.
By (8.75) the left-hand side of the above inequality is nonnegative whileits right-hand side is nonpositive so (8.77) holds under conditions (8.75) and
(8.76). The proof is completed by applying Theorem 8.3.
The next result is obtained by an immediate application of the above corol-lary to the nonhomogeneous quadratic equation of order two with constantcoefficients. We previously encountered a special case of the following corol-lary in Example 8.7.
COROLLARY 8.3
The quadratic difference equation
x2n + a0,1xnxn−1 + a0,2xnxn−2 + a1,1x
2n−1 + a1,2xn−1xn−2+
+a2,2x2n−2 + b0xn + b1xn−1 + b2xn−2 + cn = 0

Nonrecursive Equations 271
has R2 as a state-space of real solutions if the following conditions are satisfied:
a1,1 <a20,1
4, a2,2 <
a20,2
4, a1,2 =
1
2a0,1a0,2 and
cn ≤ b204
− (a0,1b0 − 2b1)2
4(a20,1 − 4a1,1)
− (a0,2b0 − 2b2)2
4(a20,2 − 4a2,2)
for all n.
Example 8.8
The state-space of solutions of the difference equation
x2n + xnxn−2 − x2
n−1 + 2xn − xn−1 + xn−2 =sin 2n
n+ 1(8.78)
is R2 because all inequalities in Corollary 8.3 hold; in particular,
−sin 2n
n+ 1= cn ≤ 1 − 0 − 1
4=
3
4for n ≥ 1 (8.79)
as required. The recursive class of Eq. (8.78) is calculated using Lemma 8.2as follows:
Ln(u, v) = −1
2(2 + v) = −1 − 1
2v
Qn(u, v) = u2 + u− v +sin 2n
n+ 1
so that
sn = −1 − 1
2sn−2 + βn
√s2n−1 + sn−1 +
1
4s2n−2 + 1 +
sin 2n
n+ 1. (8.80)
We note that under the square root above is nonnegative as expected, since
s2n−1 + sn−1 + 1 +sin 2n
n+ 1= s2n−1 + sn−1 +
1
4+
3
4+
sin 2n
n+ 1
=
(sn−1 +
1
2
)2
+3
4+
sin 2n
n+ 1
and the last two terms above sum to a nonnegative value for all n by (8.79).Equations (8.80) can be used to generate all the real solutions of (8.78).
In less restricted cases, the set S may itself be invariant but not equal to Rk.In such cases M = S but the state-space of real solutions is a proper subsetof Rk. The following result illustrates this case while extending Example 8.6to more general quadratic equations.
COROLLARY 8.4
Let aj , b ∈ R for j = 1, . . . , k with ak, b 6= 0 and consider the autonomousquadratic difference equation without mixed product terms
x2n + a1x
2n−1 + · · ·+ akx
2n−k = b. (8.81)

272 Form Symmetries and Reduction of Order
(a) If the following inequalities hold
a1 ≤ 1, a1ak ≥ 0, and (8.82)
aj ≤ a1aj−1 for j = 2, . . . , k
then the following set, which contains the orbits of all real solutions of (8.81),
S =
(u1, . . . , uk) :
k∑
j=1
aju2j ≤ b
is invariant under each of the map sequences
Fn(u1, . . . , uk) =
βn
√√√√b−k∑
j=1
aju2j , u1, u2, . . . , uk−1
that are defined by a binary sequence {βn}. Thus S is the state-space of allreal solutions of (8.81).
(b) If
b > 0,
k∑
j=1
aj > −1 (8.83)
(e.g., if b, aj > 0, i.e., S is elliptic) then (8.81) has a positive fixed point
x =
√b
1 +∑k
j=1 aj
and the following are solutions of (8.81)
{xβn}∞n=1
for every fixed but arbitrarily chosen binary sequence {βn} in {−1, 1}. Notethat (x, . . . , x) ∈ S but S is not necessarily invariant under conditions (8.83).
PROOF (a) Let (u1, . . . , uk) ∈ S. Then Fn(u1, . . . , uk) ∈ S if and only if
a1
βn
√√√√b−k∑
j=1
aju2j
2
+ a2u21 + · · ·aku
2k−1 ≤ b⇔
a1
b−k∑
j=1
aju2j
+ a2u21 + · · ·aku
2k−1 ≤ b⇔
(a2 − a21)u
21 +
k−1∑
j=3
(aj − a1aj−1)u2j − a1aku
2k ≤ (1 − a1)b.

Nonrecursive Equations 273
Now under conditions (8.82) the left-hand side of the last inequality isnonpositive while its right-hand side is nonnegative. It follows that the setS is invariant under Fn for all n so the last statement of (a) follows fromTheorem 8.3.
(b) The number x is the positive solution of
x2 + a1x2 + · · ·+ akx
2 = b
so x is a fixed point of (8.81). Finally, the sequence {xβn}∞n=−k+1 is easilyseen to satisfy (8.81) so the sequence is a solution. Note finally that
b =
1 +
k∑
j=1
aj
x2 ≥
k∑
j=1
aj x2
so that (x, . . . , x) ∈ S but conditions in (8.82) are not implied.
Similarly to Example 8.6, the substitution yn = x2n transforms Eq. (8.81)
into a linear nonhomogeneous equation
yn + a1yn−1 + · · ·+ akyn−k = b.
However, the inequalities in (8.82) are not readily inferred from the proper-ties of the k-th degree characteristic polynomial of the above nonhomogeneouslinear equation.
We close this section with a brief discussion of a case where a0,0,n 6= 0 forinfinitely many n but not eventually. In this case, the sequence {a0,0,n} mayplay a decisive role in determining the solutions of the difference equation. Thenext example illustrates this case. This example is also an improper quadraticdifference equation; that is, it violates Condition (8.50) (recall Definition 8.4).However, the equation considered in the next example does satisfy the weakercondition
There is j ∈ {0, 1, . . . , k} such that a0, j,n 6= 0 for infinitely many n.
Example 8.9
(a0,0,n 6= 0 for infinitely many n but not eventually) Consider the first-order,quadratic difference equation
anx2n = 4xn−1(1 − xn−1) (8.84)
where {an} is a nonzero binary sequence in {0, 1}.We first note that if an = 1eventually for all large n then the only real solutions of (8.84) are those in theinterval [0, 1] since both sides of the equation must be nonnegative. In thiscase, (8.84) reduces to the recursive equation
xn = 2√xn−1(1 − xn−1) (8.85)

274 Form Symmetries and Reduction of Order
which has [0, 1] as its invariant interval and indeed, its interval of definitionas a real difference equation. The real solutions of Eq. (8.85) in [0, 1] arevaried in nature (ranging from periodic to chaotic) but we need not discussthem here; the reader is referred to the standard literature on one-dimensionalmaps for more details on the solutions of (8.85).
Now, let m ≥ 2 be a fixed integer and consider the periodic binary sequence
an =
{0 if n = jm for j = 0, 1, 2, . . .1 for all other values of n.
What are solutions of (8.84) like for this sequence? We find that there aresubstantial differences between this case and the preceding one with an = 1always. For n = m we obtain
0 = amx2m = 4xm−1(1 − xm−1)
so xm−1 = 0 or 1 while the value of xm is undetermined by the above equation.Nevertheless, xm cannot be chosen arbitrarily; to understand the situationbetter, note that for n < m Eq. (8.84) is identical to (8.85). If we define themap
g(u) = 2√u(1 − u), 0 ≤ u ≤ 1
then xm−1 ∈ {0, 1} implies that
xm−2 ∈ g−1({0, 1}), xm−3 ∈ g−2({0, 1}), . . . , x0 ∈ g−m+1({0, 1}).
It follows that the initial value would have to be chosen in the finite setg−m+1({0, 1}). Let us start with the set g−1({0, 1}). This contains both 0 and1 since g(1) = 0 = g(0). Further, since g(1/2) = 1 and 1/2 is the only othernumber with this property. It follows that
g−1({0, 1}) =
{0,
1
2, 1
}.
Next, the equation g(u) = 1/2 has two solutions
2 ±√
3
4
both in the interval [0, 1] so that
g−2({0, 1}) =
{0,
2 −√
3
4,1
2,2 +
√3
4, 1
}.
Given the surjective and unimodal nature of g on [0, 1] for each of the newnumbers in g−2({0, 1}) we generate two new numbers in [0, 1] so g−3({0, 1})has four new numbers in addition to the five numbers in g−2({0, 1}). Thisprocess implies that there are 2m−1 + 1 numbers in g−m+1({0, 1}) and that
g−1({0, 1}) ⊂ g−2({0, 1}) ⊂ · · · ⊂ g−m+1({0, 1}).

Nonrecursive Equations 275
In order for Eq. (8.84) to have real solutions the initial value x0 must bechosen in g−m+1({0, 1}). For such x0 the first m − 1 terms of the solutionwill end in xm−1 which is either 0 or 1. Now, the same thing is true forxm since a2m = 0 and therefore, x2m must be selected in such a way thatx2m−1 = 0 or 1. By this reasoning, we conclude that the values of xjm forevery j = 0, 1, 2, . . .must be chosen from the finite set g−m+1({0, 1}) and thus,this finite subset of [0, 1] contains all solutions of Eq. (8.84). However, thevalues of xjm can be selected randomly in g−m+1({0, 1}) for different valuesof j so the solutions are not all periodic. For instance, if m = 2 then thevalues
x0, x2, x4, . . . ∈ g−1({0, 1}) =
{0,
1
2, 1
}.
Suppose that x0 = 1/2. Then x1 = 1 by (8.84) since a1 = 1. Next a2 = 0so we may choose x2 to be any one of the three numbers in g−1({0, 1}). If weagain choose 1/2 and do this for xn for all even n then a period-2 solution of(8.84) is obtained as {
1
2, 1,
1
2, 1, . . .
}.
Another period-2 solution of (8.84) is obtained by setting x0 = 1 and re-peating this choice as xn for all even n:
{1, 0, 1, 0, . . .}
On the other hand, we may choose x2 = 1 to obtain x3 = 0 by (8.84) thenset x4 = 1/2 and repeat this pattern to obtain a period-4 solution of (8.84) as
{1
2, 1, 1, 0,
1
2, 1, 1, 0, . . .
}.
Other period-4 solutions are possible by different selections of values foreven-indexed terms; e.g.,
{0, 0,
1
2, 1, 0, 0,
1
2, 1, , . . .
}
and a few other possibilities. In a similar manner we may obtain various solu-tions for each even period 6, 8, etc. nonperiodic solutions are also possible bychoosing values for even-indexed terms in a non-repetitive way. For instance,we may set x2j = 1/2 for all odd primes j and x2j = 1 for all other values ofj. The solution of (8.84) obtained in this way
{1, 0, 1, 0, 1, 0,
1
2n=6
, 1, 1, 0,1
2n=10
, 1, . . . ,1
2n=14
, . . . ,1
2n=22
, . . .
}
is not periodic.

276 Form Symmetries and Reduction of Order
8.4.2 Quadratic factors and cofactors
We now consider equations of type (8.49) that have a right semi-invertibleform symmetry. To simplify the discussion without losing sight of essentialideas, we limit attention to the case k = 2, or the second-order equation
En(xn, xn−1, xn−2) = 0 (8.86)
on a field F where
En(u0, u1, u2) = a0,0,nu20 + a0,1,nu0u1 + a0,2,nu0u2 + (8.87)
a1,0,nu21 + a1,2,nu1u2 + a2,0,nu
22 +
b0,nu0 + b1,nu1 + b2,nu2 + cn.
In this expression, to ensure that u0 (corresponding to the xn term) doesnot drop out, we assume that for each n,
if a0,0,n = a0,1,n = b0,n = 0 or a1,2,n = a2,0,n = b2,n = 0, (8.88)
then a0,2,n 6= 0.
If the quadratic expression (8.87) has a form symmetry {Hn} where
Hn(u0, u1, u2) = [hn(u0, u1), hn−1(u1, u2)]
then there are sequences {φn}, {hn} of functions φn, hn : F2 → F that satisfythe relation (8.32), i.e., for all (u0, u1, u2) ∈ F3,
φn(hn(u0, u1), hn−1(u1, u2)) = En(u0, u1, u2). (8.89)
Further, the form symmetry Hn is right semi-invertible with respect to Fif there are functions µn, θn : F → F where θn is a bijection for all n and
hn(u, v) = µn(u) + θn(v).
In general, the functions φn, hn satisfying (8.89) need not be of polynomialtype even though all En are quadratic polynomials. But if we consider onlyφn, hn that are of polynomial type then (8.89) is satisfied if one of φn or hn isquadratic and the other linear for each n. In such cases, the factorization ofEq. (8.87) is also of quadratic type since both the factor and cofactor equa-tions are quadratic difference equations. Further, in the right semi-invertiblecase, θn must be linear for the same value of n so a polynomial hn may bedefined as
hn(u, v) = αnu2 + βnu+ γn + δnv (8.90)
where αn, βn, γn, δn ∈ F with δn 6= 0 for all n and either αn 6= 0 or βn 6= 0for every n. There are two cases to consider.
Case 1. The factor-function sequence
φn(u, v) = anu+ bnv + cn (8.91)

Nonrecursive Equations 277
consists of polynomials of degree 1 with variable coefficients for all n. Thenaccording to Eq. (8.89)
En(u0, u1, u2) = an(αnu20 + βnu0 + γn + δnu1) +
bn(αn−1u21 + βn−1u1 + γn−1 + δn−1u2) + cn
= anαnu20 + bnαn−1u
21 + anβnu0 + (8.92)
(anδn + bnβn−1)u1 + bnδn−1u2 + anγn + bnγn−1 + cn.
Conditions (8.88) require that an 6= 0 for all n. Further, to keep the equa-tion nonlinear of order 2, we assume that αn, bn, δn 6= 0 for all n. Equation(8.5) in Example 8.1 is a special case of (8.92). Note that there are no mixedquadratic terms in (8.92).
As is apparent from the expression (8.92) we may, for economy of notation,normalize hn by setting αn = 1 and γn = 0 for all n without losing generality.
The next result specifies when a quadratic difference equation of the Case1 variety has a form symmetry of type (8.90) and a factor-function sequenceof type (8.91).
PROPOSITION 8.1
Consider the quadratic difference equation
x2n + Anx
2n−1 +Bnxn +Cnxn−1 +Dnxn−2 + Fn = 0 (8.93)
with An, Bn, Cn, Dn, Fn in a nontrivial field F for all n. If the coefficientssatisfy the equality
Dn+1 + An+1AnBn−1 = An+1Cn (8.94)
for every n then (8.93) has a factorization into first-order equations
tn + Antn−1 + Fn = 0,
x2n + An+1Bnxn +Dn+1xn−1 = An+1tn.
PROOF Since (8.93) of the same type as (8.92) we match coefficients inthe two equations to obtain
an = 1, bn = An, βn = Bn, bnδn−1 = Dn, cn = Fn
and
δn + bnβn−1 = Cn.
Since δn−1 = Dn/bn = Dn/An this equation is equivalent to (8.94). Now,the factor-function sequence φn is reaily obtained from (8.91) and the cofactor
from (8.90).

278 Form Symmetries and Reduction of Order
Note that (8.94) effectively gives the value of Dn in terms of the remain-ing coefficients. If the coefficients are constants A,B, C,D in the precedingproposition then the following consequence of the above proposition appliesto a generalization of Eq. (8.5) we encountered in Example 8.1.
COROLLARY 8.5
The quadratic difference equation
x2n + Ax2
n−1 +Bxn +Cxn−1 +A(C − AB)xn−2 = Fn
has a factorization into first-order equations
tn +Atn−1 = Fn,
x2n +ABxn +A(C − AB)xn−1 = Atn.
The next case is the reverse of Case 1.Case 2. φn(u, v) = anu
2 + bnuv + cnv2 + dnu+ env + fn is a polynomial
of degree 2 with variable coefficients in a field F for all n. Then Eq. (8.89)yields a quadratic expression if hn contains no quadratic terms, i.e., if αn = 0for all n. Therefore,
hn(u, v) = βnu+ δnv + γn. (8.95)
This form symmetry is linear in the variables u, v and is discussed in detailin Section 8.4.3 below. Note that if (8.95) is inserted into the quadraticexpression En then
En(u0, u1, u2) = anhn(u0, u1)2 + bnhn(u0, u1)hn−1(u1, u2) + (8.96)
cnhn−1(u1, u2)2 + dnhn(u0, u1) + enhn−1(u1, u2) + fn.
Conditions (8.88) assure that En contains terms u0 and u2 as well asquadratic terms for every n. Note that (8.96) subsumes (8.92) and containsmixed quadratic terms. Further, hn is semi-invertible so the factor equationis recursive.
By the above construction, any difference equation of order two on a fieldF that can be written in the form (8.96) has a factorization into a pair offirst-order difference equations.
Example 8.10
Consider the quadratic expression (8.96) on R with the parameter values
bn = cn = dn = γn = 0, an = −1, βn = 1, δn = − 1
2n, en = n.
Then the difference equation En(xn, xn−1, xn−2) = 0 may be written as
4n2x2n − 4nxnxn−1 + x2
n−1 − 4n3xn−1 + 2n2xn−2 = σn (8.97)

Nonrecursive Equations 279
where σn = 4n2fn is an arbitrary sequence of real numbers. By the precedingdiscussion, Eq. (8.97) has the factorization
t2n = ntn−1 +σn
4n2
xn =1
2nxn−1 + tn.
8.4.3 Quadratic equations with a linear form symmetry
The factorization in Example 8.10 can also be obtained from Eq. (8.97)directly by algebraic manipulations followed by the substitution tn = xn −(1/2n)xn−1. Alternatively, we may obtain the factorization using Theorem 8.2(see the Problems section below). The next corollary of Theorem 8.2 examinesconditions that imply the existence of a linear form symmetry generally forEq. (8.86). By a linear form symmetry in this section we mean the normalizedspecial case of (8.95), i.e.,
hn(u, v) = αnu+ v, αn 6= 0 for all n. (8.98)
COROLLARY 8.6
The quadratic difference equation (8.86) has the linear form symmetry withcomponents hn, hn−1 defined by (8.98) if and only if a sequence {αn} exists inthe field F such that αn 6= 0 for all n and all four of the following first-orderequations are satisfied:
a0,0,n − a0,1,nαn + a1,1,nα2n + a0,2,nαnαn−1 − a1,2,nα
2nαn−1
+a2,2,nα2nα
2n−1 = 0 (8.99)
a0,1,n − a0,2,nαn−1 − 2a1,1,nαn + 2a1,2,nαnαn−1
−2a2,2,nαnα2n−1 = 0 (8.100)
a0,2,n − a1,2,nαn + 2a2,2,nαnαn−1 = 0 (8.101)
b0,n − b1,nαn + b2,nαnαn−1 = 0. (8.102)
In this case, Eq. (8.86) has a factorization with a first-order factor equation
(a1,1,n − a1,2,nαn−1 + a2,2,nα2n−1)t
2n + a2,2,nt
2n−1 + (a1,2,n−
2a2,2,nαn−1)tntn−1 + (b1,n − b2,nαn−1)tn + b2,ntn−1 + cn = 0.
and a cofactor equation αnxn + xn−1 = tn also of order one.
PROOF For any nonzero sequence {αn} in F the functions hn definedby (8.98) are semi-invertible with µn(u) = αnu and θn(v) = v for all n. Note

280 Form Symmetries and Reduction of Order
that θ−1n = θn for all n and the group structure is the additive group of the
field so the quantities ζj,n in Theorem 8.2 take the forms
ζ1,n = ζ1,n(u0, v1) = −αnu0 + v1,
ζ2,n = ζ2,n(u0, v1, v2) = αnαn−1u0 − αn−1v1 + v2.
By Theorem 8.2, Eq. (8.86) has the linear form symmetry if and only if theexpression En = En(u0, ζ1,n, ζ2,n) is independent of u0 for all n. Now
En = a0,0,nu20 + a0,1,nu0(v1 − αnu0) +
a0,2,nu0(αnαn−1u0 − αn−1v1 + v2) + a1,1,n(v1 − αnu0)2 +
a1,2,n(v1 − αnu0)(αnαn−1u0 − αn−1v1 + v2) +
a2,2,n(αnαn−1u0 − αn−1v1 + v2)2 + b0,nu0 +
b1,n(v1 − αnu0) + b2,n(αnαn−1u0 − αn−1v1 + v2) + cn.
Multiplying terms in the above expression gives
En = a0,0,nu20 + a0,1,nu0v1 − a0,1,nαnu
20 + a0,2,nαnαn−1u
20 −
a0,2,nαn−1u0v1 + a0,2,nu0v2 + a1,1,nv21 − 2a1,1,nαnu0v1 +
a1,1,nα2nu
20 + a1,2,nαnαn−1u0v1 − a1,2,nαn−1v
21 + a1,2,nv1v2 −
a1,2,nα2nαn−1u
20 + a1,2,nαnαn−1u0v1 − a1,2,nαnu0v2 +
a2,2,nα2nα
2n−1u
20 − 2a2,2,nαnα
2n−1u0v1 + 2a2,2,nαnαn−1u0v2 +
a2,2,n(αn−1v1 − v2)2 + b0,nu0 + b1,nv1 − b1,nαnu0 +
b2,nαnαn−1u0 − b2,n(αn−1v1 − v2) + cn.
Terms containing u0 or u20 must sum to zeros. Rearranging terms in the
preceding expression gives
En = (a0,0,n − a0,1,nαn + a0,2,nαnαn−1 + a1,1,nα2n − a1,2,nα
2nαn−1 +
a2,2,nα2nα
2n−1)u
20 + (a0,1,n − a0,2,nαn−1 − 2a1,1,nαn +
2a1,2,nαnαn−1 − 2a2,2,nαnα2n−1)u0v1 + (a0,2,n − a1,2,nαn +
2a2,2,nαnαn−1)u0v2 + (b0,n − b1,nαn + b2,nαnαn−1)u0 +
(a1,1,n − a1,2,nαn−1 + a2,2,nα2n−1)v
21 + a2,2,nv
22 + (a1,2,n −
2a2,2,nαn−1)v1v2 + (b1,n − b2,nαn−1)v1 + b2,nv2 + cn.
Setting the coefficients of variable terms containing u0 equal to zeros givesthe four first-order equations (8.99)–(8.102). The part of En above that doesnot vanish yields the factor functions
φn(v1, v2) = (a1,1,n − a1,2,nαn−1 + a2,2,nα2n−1)v
21 + a2,2,nv
22 +
(a1,2,n − 2a2,2,nαn−1)v1v2 + (b1,n − b2,nαn−1)v1 +
b2,nv2 + cn.

Nonrecursive Equations 281
This expression plus the linear cofactor tn = hn(xn, xn−1) give the stated
factorization.
Equations (8.99)–(8.102) are reminiscent of the Riccati relation (7.36) inSection 7.4. Whereas one relation suffices for linear equations, four relationsare required for the occurrence of the linear form symmetry in a quadraticdifference equation. Of course, nonlinear form symmetries may occur in thequadratic case if one or more of the equations (8.99)–(8.102) fail; see the dis-cussion before Example 8.10 above. In particular, there are rational recursiveequations that do not possess the linear form symmetry; see the Problemssection below.
If all coefficients in En(u0, u1, u2) are constants except possibly the freeterm cn then a simpler version of Corollary 8.6 is easily obtained as follows.
COROLLARY 8.7
The quadratic difference equation
a0,0x2n + a0,1xnxn−1 + a0,2xnxn−2 + a1,1x
2n−1 + a1,2xn−1xn−2
+a2,2x2n−2 + b0xn + b1xn−1 + b2xn−2 + cn = 0 (8.103)
in a nontrivial field F has the linear form symmetry with components h(u, v) =αu + v if and only if the following polynomials have a common nonzero rootα in F :
a0,0 − a0,1α+ (a1,1 + a0,2)α2 − a1,2α
3 + a2,2α4 = 0, (8.104)
a0,1 − (a0,2 + 2a1,1)α+ 2a1,2α2 − 2a2,2α
3 = 0, (8.105)
a0,2 − a1,2α+ 2a2,2α2 = 0, (8.106)
b0 − b1α+ b2α2 = 0. (8.107)
If such a root α 6= 0 exists then Eq. (8.103) has the factorization
(a1,1 − a1,2α+ a2,2α2)t2n + (a1,2 − 2a2,2α)tntn−1 + a2,2t
2n−1
+(b1 − b2α)tn + b2tn−1 + cn = 0,
xn = − 1
αxn−1 +
tnα.
The following example gives a straightforward application of Corollary 8.7.
Example 8.11
Consider the difference equation
axnxn−1 + bxn−1xn−2 + cxnxn−2 + dx2n−2 = δn (8.108)
with a, b, c, d, δn ∈ R. To check whether Eq. (8.108) has a factorization intofirst-order equations we use Corollary 8.7. In this case, (8.104)–(8.106) take

282 Form Symmetries and Reduction of Order
the following forms
dα4 − bα3 + cα2 − aα = 0 (8.109)
−2dα3 + 2bα2 − cα+ a = 0 (8.110)
2dα2 − bα+ c = 0 (8.111)
while (8.107) holds trivially. If α is a nonzero solution of (8.109)–(8.111) thenby dividing (8.109) by α and adding the result to (8.110) we find that
−dα3 + bα2 = 0 ⇒ b = dα. (8.112)
Similarly, multiplying (8.111) by α and adding the result to (8.110) gives
bα2 + a = 0 ⇒ a = −bα2 = −dα3. (8.113)
And from (8.111) and (8.112) we obtain
dα2 + α(dα− b) + c = 0 ⇒ c = −dα2. (8.114)
From (8.112)–(8.114) it follows that
α =b
d, a = − b3
d2, c = −b
2
d. (8.115)
From (8.115) we conclude that if b, d 6= 0 then there is a nonzero α ∈ R thatmakes Corollary 8.7 applicable, provided that the coefficients a, c are given asin (8.115). If (8.115) holds then Eq. (8.108) has a factor equation
(−bα+ dα2)t2n + (b− 2dα)tntn−1 + dt2n−1 − δn = 0, or:
−btntn−1 + dt2n−1 − δn = 0.
Thus, subject to (8.115), Eq. (8.108) has the factorization
btntn−1 − dt2n−1 + δn = 0,
b
dxn + xn−1 = tn
which can also be written in a recursive form as
tn =d
btn−1 −
δnbtn−1
,
xn = −dbxn−1 + tn.
We note that Eq. (8.108) also has a unique recursive form and that an SCfactorization of the recursive form is the same as that obtained in Example8.11. See the Problems below.

Nonrecursive Equations 283
In the next example we use Corollary 8.7 to study the solutions of aquadratic difference equation that does not possess a unique recursive form.
Example 8.12
Let a, b, c, d be nonzero real numbers and consider the equation
x2n + axnxn−1 + bxnxn−2 + cxn−1xn−2 = d. (8.116)
If a linear form symmetry exists under some conditions on the real parametersin Eq. (8.116) then we obtain a factorization of this equation into two first-order equations. To find the linear form symmetry we use Corollary 8.7. Inthe absence of linear terms in (8.116), Eq. (8.107) holds trivially; the otherthree equations (8.104)–(8.106) take the following forms
1 − aα+ bα2 − cα3 = 0 (8.117)
a− bα+ 2cα2 = 0 (8.118)
b− cα = 0. (8.119)
From (8.119) it follows that α = b/c. This nonzero value of α must satisfy theother two equations in the above system so from (8.118) we obtain
a+b2
c= 0
while (8.117) yields
1 − ab
c= 0 or c = ab.
Eliminating b and c from the last two equations gives
b = −a2, c = −a3 and α =1
a.
These calculations show that the equation
x2n + axnxn−1 − a2xnxn−2 − a3xn−1xn−2 − d = 0 (8.120)
has the linear form symmetry h(u, v) = (1/a)u + v and the correspondingfactorization
a2t2n − a3tntn−1 − d = 0, (8.121)
xn + axn−1 = atn. (8.122)
Let us use this factorization to obtain information about the real solutions of(8.120). Although the factor equation (8.121) has order one, it is nonrecursive.Thus we start by completing the square in (8.121) to obtain
(tn − a
2tn−1
)2
=a2
4t2n−1 +
d
a2

284 Form Symmetries and Reduction of Order
which yields the recursive class of Eq. (8.121)
tn =a
2tn−1 + βn
√a2
4t2n−1 +
d
a2(8.123)
where as usual, {βn} is a binary sequence in {−1, 1}. Depending on the valuesof a and d, different types of behaviors are possible for the solutions of (8.123).We consider a particular case here for illustration; let
−1 < a < 0, d > 0. (8.124)
Under conditions (8.124) every solution of (8.123) with real initial values isreal, no matter what binary sequence {βn} is chosen. To simplify the exposi-tion, we consider the constant case where βn = 1 for all n, i.e., the autonomousequation
tn =a
2tn−1 +
√a2
4t2n−1 +
d
a2.
In this case, it is easy to see that the function
ψ(t) =a
2t+
√a2
4t2 +
d
a2
is positive and has a unique fixed point
t =1
|a|
√d
1 − a.
Further, under conditions (8.124) routine calculation shows that the iterate
ψ(ψ(t)) =a
2ψ(t) +
√a2
4ψ(t)2 +
d
a2
=a2
4t+
a
2
√a2
4t2 +
d
a2+
√√√√a2
4
[a
2t+
√a2
4t2 +
d
a2
]2
+d
a2
=a2
4t+
a
2
√a2
4t2 +
d
a2+
√a4
8t2 +
a3
4t
√a2
4t2 +
d
a2+d
4+
d
a2.
has the property
ψ(ψ(t)) > t if t < t and ψ(ψ(t)) < t if t > t.
This fact implies that t is stable and globally attracting; see the Appendix.With tn → t as n → ∞ it can be shown that under conditions (8.124) the
corresponding solution {xn} of the cofactor equation (8.122) approaches thefixed point x of (8.120) where
x =at
1 + a=
a
−a(1 + a)
√d
1 − a= − 1
1 + a
√d
1 − a.

Nonrecursive Equations 285
Of course, Eq. (8.120) possesses a greater variety of solutions if differentbinary sequences {βn} are chosen or if different ranges are considered forparameters such as a.
Although a form symmetry is not known for Eq. (8.116) with arbitrarynonzero real parameters a, b, c, d we may determine the recursive class of(8.116) by completing the squares; see the Problems for this chapter.
Corollary 8.7 may also imply the non-existence of a linear form symmetryfor Eq. (8.103) as seen in the next example.
Example 8.13
(a) The following quadratic difference equation on R cannot have a linearform symmetry since Eq. (8.106) does not hold for a nonzero α:
x2n + x2
n−1 + x2n−2 = cn, cn ∈ R for all n. (8.125)
(b) Eq. (8.4) in Example 8.1 does not have a linear form symmetry. Infact, the more general equation
x2n − ax2
n−1 − bxn−1 − dxn−2 = cn
cannot have a linear form symmetry since Eq. (8.105) does not hold if a 6= 0and Eq. (8.104) fails if a = 0.
8.5 An order-preserving form symmetry
In this closing section we formalize an observation whose special cases wereencountered earlier.
REMARK 8.5 (An order-preserving form symmetry) Note that ifyn = x2
n then (8.125) is transformed into a linear equation
yn + yn−1 + yn−2 = cn
which does have a linear form symmetry and can thus be factored in the usualway into two first-order difference equations. Then substituting x2
n back inthe cofactor gives a factorization of (8.125). The substitution yn = x2
n is anorder-preserving form symmetry since it does not reduce the order of (8.125).
This useful idea can be extended to the more general difference equation
f(xn) + a1,nf(xn−1) + · · ·+ ak,nf(xn−k) = cn (8.126)

286 Form Symmetries and Reduction of Order
where {aj,n} and {cn} are given sequences in a field F for j = 1, 2, . . . , k andf : F → F a given function. The substitution yn = f(xn) transforms (8.126)into a linear equation which can be factored in the usual way and in whichthe factor equation is again linear of order k − 1.
Example 8.14
Consider once again the equation
x2n + x2
n−1 + x2n−2 = 1 (8.127)
from Example 8.6 and use the order preserving form symmetry yn = x2n to
tranform (8.127) into the nonhomogeneous linear equation
yn + yn−1 + yn−2 = 1. (8.128)
We now use the solutions of (8.128) to study the solutions of (8.127). Theeigenvalues of the homogeneous part of (8.128) are roots of the polynomialλ2 + λ+ 1. These roots are
λ± = −1
2±
√3
2i
which are both complex with modulus 1. The argument θ = 2π/3 is obtainedfrom cos θ = −1/2, so the general solution of (8.128) can be written as
yn = C1 cos2πn
3+ C2 sin
2πn
3+
1
3
since 1/3 is the unique fixed point of (8.128). C1, C2 are constants that dependon initial values y0 = x2
0, y−1 = x2−1 and are calculated from the system
−1
2C1 −
√3
2C2 +
1
3= x2
−1
C1 +1
3= x2
0.
Thus,
C1 = x20 −
1
3, C2 =
1 − 2x2−1 − x2
0√3
and the general solution of (8.128) is
yn =
(x2
0 −1
3
)cos
2πn
3+
(1 − 2x2
−1 − x20√
3
)sin
2πn
3+
1
3. (8.129)
Only those solutions {yn} of (8.129) that are nonnegative can generate realsolutions of (8.127). In particular, since it is necessary that
y1 = 1 − x20 − x2
−1 ≥ 0

Nonrecursive Equations 287
it follows that x20 +x2
−1 ≤ 1, as expected. If {yn} as defined by (8.129) is non-negative then taking square roots we find that a formula for the correspondingreal solutions of (8.127) is
xn = βn
√(x2
0 −1
3
)cos
2πn
3+
(1 − 2x2
−1 − x20√
3
)sin
2πn
3+
1
3(8.130)
where {βn} is an arbitrary binary sequence in {−1, 1}. In particular, if
x0, x−1 = ± 1√3
then (8.130) reduces to (8.60) in Example 8.6.
A comparison of the procedure used in the preceding example with that inExample 8.6 indicates that for Eq. (8.127) the direct approach in Example8.6 is faster and more informative than the approach in Example 8.14 basedon solving a linear equation by the classical method; also see Example 8.4.However, the next example shows that transformation to linear equations canbe beneficial in other cases.
Example 8.15
Consider the following difference equation of order three
x2n + x2
n−1 + x2n−3 = 1. (8.131)
with the recursive class
sn = βn
√1 − s2n−1 − s2n−3. (8.132)
A simple substitution verifies that for each binary sequence {βn} with βn ∈{−1, 1} for all n the following sequence is a real solution of (8.131):
{βn√
3
}∞
n=−2
. (8.133)
Though simple in nature, these real solutions include sequences of all pos-sible periods as well as bounded, nonperiodic ones. We ask if they are theonly real solutions of (8.131). Numerical simulations do not reveal any realsolutions of (8.132) beyond those listed in (8.133). We claim that (8.133)gives all real solutions of (8.131).
To prove this claim, we first transform (8.131) into a nonhomogeneous linearequation using the substitution (8.61) to obtain
yn + yn−1 + yn−3 = 1

288 Form Symmetries and Reduction of Order
which we can also write in the more familiar form
yn+1 = −yn − yn−2 + 1. (8.134)
The eigenvalues of the homogeneous part of (8.134) are roots of the charac-teristic equation
λ3 + λ2 + 1 = 0. (8.135)
This equation has one real root λ0 such that
−3
2< λ0 < −1 (8.136)
since
(−3
2
)3
+
(−3
2
)2
+ 1 = −1
8< 0
(−1)3
+ (−1)2
+ 1 = 1 > 0.
The other roots of (8.135) are found by first dividing
λ3 + λ2 + 1
λ− λ0= λ2 + (λ0 + 1)λ+ λ0(λ0 + 1)
and then finding the roots of the quadratic equation on the right-hand side as
λ± =−(λ0 + 1) ±
√(λ0 + 1)2 − 4λ0(λ0 + 1)
2.
By (8.136) λ± are complex roots with modulus
|λ±| =√λ0(λ0 + 1) < 1. (8.137)
Now the general solution of (8.134) can be stated as
yn = C1λn0 +
(√λ0(λ0 + 1)
)n
(C2 cos θn +C3 sin θn) +1
3(8.138)
where θ is the argument for complex roots λ± and
Ci = Ci(y0, y−1, y−2), i = 1, 2, 3
are constants depending on the initial values. By (8.136) the first term λn0
in (8.138) is unbounded and eventually oscillating with both positive andnegative values. By (8.137) the remaining terms approach 1/3, the fixedpoint of (8.134), as n → ∞. Thus if C1 6= 0 then (8.131) cannot have realsolutions. The exceptional solutions corresponding to C1 = 0 are the onlyones for which real solutions may occur for (8.131).

Nonrecursive Equations 289
The constants C1, C2, C3 are calculated by solving the following system ofequations that is obtained from (8.138)
C1 + C2 +1
3= y0 (n = 0)
C1
λ0+C2 cos θ −C3 sin θ√
λ0(λ0 + 1)+
1
3= y−1 (n = −1)
C1
λ20
+C2 cos 2θ − C3 sin 2θ
λ0(λ0 + 1)+
1
3= y−2 (n = −2).
We may determine C1 by eliminating the other two constants. By routinecalculation we obtain
C1 = A
(y0 − 1
3
)+B
(y−1 −
1
3
)+ C
(y−2 −
1
3
)(8.139)
where
A =λ0
λ0 + 1, B = −2
√λ0(λ0 + 1) cos θ, C = λ2
0. (8.140)
It is clear from (8.139) and (8.140) that
C1 = 0 if and only if y0 = y−1 = y−2 =1
3.
This proves our claim above that the only real solutions of (8.131) are thosegiven by (8.133).
Variations of (8.131) are discussed in the Problems for this section. Inparticular, the third-order equation
x2n + x2
n−1 + x2n−2 + x2
n−3 = 1
is seen to have a large variety of real solutions, in contrast to (8.131). Theeffect of the term x2
n−2 that is missing from (8.131) is most readily explainedby the changes that occur in the sizes of eigenvalues of the linear equationthat we obtain upon the substitution yn = x2
n. A direct approach to thisproblem (showing non-existence of invariant sets in the domain, namely, theunit ball centered at the origin of R3 rather than using linear equations) isless straightforward.
Example 8.16
Let a, b ∈ R with b > 0 and consider the difference equation
x2n + x2
n−1 + x2n−2 = a(xn + xn−1 + xn−2) + b. (8.141)

290 Form Symmetries and Reduction of Order
This equation can be written as
x2n − axn + x2
n−1 − axn−1 + x2n−2 − axn−2 = b. (8.142)
Substituting
yn = f(xn) = x2n − axn (8.143)
in (8.142) yields the nonhomogeneous linear equation (8.128) whose generalsolution (8.129) was calculated in Example 8.14. Now completing the squarein (8.143) gives
(xn − a
2
)2
= yn +a2
4
and this leads to the recursive class
xn =a
2+ βn
√yn +
a2
4
if yn + a2/4 ≥ 0.
8.6 Notes
Nonrecursive scalar difference equations have historically been studied in waysthat are similar to the studies of scalar differential equations, which do nothave natural recursive forms. The approach in this chapter is new and differ-ent in that solutions of nonrecursive equations are found either by derivingrecursive classes or through reduction of order and factorization.
Quadratic difference equations have not been previously studied as a class.This is surprising in the sense that a large number of other difference equationsbelong to this remarkable class. This scarcity of results is also understandablesince existing methods of study yield relatively little of value that is common toall quadratic difference equations. It is hoped that the new approach presentedin this chapter will motivate future studies of this interesting class of differenceequations.
The Henon difference equation, more commonly known as the Henon map, isdiscussed in most introductory texts on difference equations; see, e.g., Devaney(1989) or Strogatz (1994). The logistic equation with delay has been studiedin Morimoto (1988, 1989), and Gu and Ruan (2005).

Nonrecursive Equations 291
8.7 Problems
8.1 Furnish the details of calculation for Items 1–4 in Example 8.1. Thebehaviors of all real solutions may be described in terms of the line v = u,the three parabolas v = u2/b, v = u2/b+ b/4, v = u2/b+u and the parabolasthat are parallel to v = u2/b.
8.2 Following the line of reasoning in Example 8.4, show that the differenceequation
k∑
i=0
(k
i
)xn−i = cn (8.144)
where(ki
)= k!/[i!(k−i)!] are the binomial coefficients and cn are positive real
numbers for all n has a factorization
k−1∑
j=0
(k − 1
j
)tn−j = cn,
xn + xn−1 = tn
in the additive semigroup (0,∞)(as well as in its subsemigroups N or Q∩(0,∞)if these contain cn for all n). Conclude that Eq. (8.144) admits repeatedreductions in order until a set of k first-order equations is obtained.
8.3 Use an analysis similar to that in Example 8.6 to find the recursive classand study the solution set of the following equation
x2n + x2
n−1 + x2n−2 + · · ·+ x2
n−k = 1 (8.145)
with k ≥ 1 andk∑
i=1
x2−i ≤ 1. (8.146)
In particular, establish the following:(a) Obtain the analog of the sequence (8.59).(b) For each binary sequence {βn} with βn ∈ {−1, 1} for all n the following
sequence is a solution of (8.145):
{βn√k + 1
}∞
n=−k+1
.
Thus (8.145) has periodic solutions of all possible periods as well as boundednonperiodic solutions.
(c) Every solution of the following recursive equation
xn =√
1 − x2n−1 − x2
n−2 − · · · − x2n−k

292 Form Symmetries and Reduction of Order
that satisfies (8.146) and is not eventually constant has period k + 1. Notethat these solutions do not appear in (a).
(d) The substitution yn = x2n converts (8.145) to the nonhomogeneous linear
equationyn + yn−1 + · · ·+ yn−k = 1.
The eigenvalues of the homogeneous part are the (k + 1)-th roots of unity.For k = 3 use the general solution of the linear equation to determine, us-ing the classical linear theory, a formula for the solutions of the third-orderquadratic equation similarly to the one obtained in Example 8.14 for the casek = 2.
Note. Recall from Example 8.4 that the state-space of all real solutions of(8.145) is the closed unit ball in Rk.
8.4 Using the ideas in Example 8.15 determine all real solutions of the fol-lowing third-order difference equation
x2n + x2
n−2 + x2n−3 = 1.
8.5 Let S be invariant so that S = M where M is the largest invariant subsetof S as in Definition 8.5. Does this imply that every solution of the quadraticequation (8.65) is real? Note that invariance of S is relative to a particularbinary sequence {βn}.8.6 By completing the square, determine the recursive class of Eq. (8.116) inExample 8.12 for arbitrary nonzero real parameters a, b, c, d.
8.7 Assume that 2a+ b < 1 in the quadratic equation (8.63) of Example 8.7.(a) Show that (8.63) has a positive fixed point
x =
√c
1 − 2a− b.
(b) Use the fixed point in (a) to show that the nonrecursive equation (8.63)has periodic solutions of all possible periods as well as bounded nonperiodicsolutions.
(c) Use Corollary 8.7 to verify that Eq. (8.63) does not have a linear formsymmetry.
8.8 Show that for all integers k ≥ 2 the following “delay” version of equation(8.63) has the same oscillation properties that are mentioned in Example 8.7:
x2n = axnxn−1 + bx2
n−k + c.
8.9 (a) Find the recursive class and discuss the behavior of solutions of thedifference equation
x2n = axnxn−1 + bx2
n−2 + cxn−1 + dxn−2 + e (8.147)

Nonrecursive Equations 293
which generalizes Eq. (8.63) in Example 8.7.(b) Show that every solution of every equation in the recursive class (i.e.,
for every binary sequence {βn}) with real initial values is a real solution of(8.147) if
a 6= 0, b > 0, e ≥ c2
a2+d2
4b.
(c) Show that the real solutions in (b) have the same oscillatory propertiesas those in Example 8.7.
8.10 Prove that inequality (8.77) is equivalent to (8.72).
8.10 (a) Use Corollary 8.5 to determine a factorization for the following vari-ation of the equation in Example 8.1:
x2n + ax2
n−1 + bxn − a2bxn−2 = c
where a, b, c are real constants.(b) Use the result in (a) to explore the existence of real solutions.
8.11 In Example 8.9 let m = 3.(a) Find a periodic solution of (8.84) that is never zero.(b) Does (8.84) have a period-2 solution? If so what is it? If not then why
not?(c) Find a nonperiodic solution of (8.84).
8.12 Let F be a nontrivial field and define functions φn, hn : F2 → F asfollows:
φn(u, v) = an +c
uv, hn(u, v) =
1
u+ bnv.
where c, an, bn ∈ F with an, bn 6= 0 for all n. Show that
φn(hn(u0, u1), hn−1(u1, u2))
is a quadratic polynomial for every n and determine the difference equationof order 2 that satisfies (8.32). φn and hn are examples of non-polynomialfactors and form symmetries for a quadratic difference equation. By solvingfor xn show also that this equation has a unique recursive expression as arational equation.
8.13 (a) Use Corollary 8.7 to prove that the quadratic difference equation
a0,1xnxn−1 + a0,2xnxn−2 + b0xn + b1xn−1 + b2xn−2 = cn (8.148)
does not have a linear form symmetry unless it is linear, i.e., a0,1 = a0,2 = 0.Conclude that the Ladas rational difference equations
xn =axn−1 + bxn−2 + c
Axn−1 + Bxn−2 + C(8.149)

294 Form Symmetries and Reduction of Order
do not have a linear form symmetry in the nonlinear case A,B 6= 0.(b) Suppose that A = a0,1 6= 0 or B = a0,2 6= 0. If x0, x−1 are initial values
for whichAxm−1 + Bxm−2 + C = 0
in (8.149) for a least m ≥ 1 then show that (8.148) with cn = C for all nand b0 = a, b1 = b, b2 = c has no solutions whose orbit contain the point(x0, x−1).
(c) State and prove a generalization of (b) for more general rational recursivedifference equations and their quadratic versions.
8.14 For the quadratic difference equation
a0,0x2n + a0,1xnxn−1 + a1,1x
2n−1 + b0xn + b1xn−1 + b2xn−2 = cn (8.150)
assume that all cn and all the coefficients on the left-hand side are real numberswith b2 6= 0.
(a) Use Corollary 8.7 to prove that Eq. (8.150) has a factorization into twofirst-order difference equations as
a0,1a1,1t2n + 2b0a1,1tn + a0,1b2tn−1 = a0,1cn, (8.151)
xn = −2a1,1
a0,1xn−1 +
2a1,1
a0,1tn
provided that
a0,1, a1,1 6= 0, a0,0 =a20,1
4a1,1, and (8.152)
4a21,1b0 − 2a0,1a1,1b1 + a2
0,1b2 = 0.
A discussion similar to that in Example 8.11 may be used here. Note thatwith the value of a0,0 in (8.152) Eq. (8.150) can be written as
(a0,1xn + 2a1,1xn−1)2+ β0xn + β1xn−1 + β2xn−2 = 4a1,1cn
where βj = 4a1,1bj for j = 0, 1, 2.(b) In addition to the restrictions (8.152) on parameters, let b2a1,1 < 0
and cn ≥ −a1,1(b0/a0,1)2 for all n. By completing the square, show that the
factor equation (8.151) has a positive solution {tn} that is generated by therecursive first-order equation
tn = − b0a0,1
+
√(b0a0,1
)2
+cna1,1
− b2a1,1
tn−1
if t0 = (a0,1/2a1,1)x0 +x−1 > 0. Conclude that Eq. (8.150) has real solutionsthrough any initial point (x0, x−1) in the region of the state-space R2 definedby the inequality (a0,1/2a1,1)x0 + x−1 > 0.

Nonrecursive Equations 295
(c) If in addition to the hypotheses in Part (b), cn = c is constant for all nthen determine the asymptotic behaviors of solutions {tn} and {xn} in Part(b) for all possible parameter values. Use this information to comment on theclass of all solutions of Eq. (8.150).
8.15 (a) Use Theorem 8.2 to derive the factorization in Example 8.10 usingthe semi-invertible hn defined by (8.95).
(b) Use this factorization to prove that Eq. (8.97) with σn ≥ 0 for all n hasa positive solution for each initial point (x1, x0) where
x1 =1
2x0 + t0 and x0, t0 > 0.
(c) Use the factorization in Example 8.10 to obtain a factorization for therecursive equation
xn =
√1
nxnxn−1 −
1
4n2x2
n−1 + nxn−1 −1
2xn−2.
8.16 Write Eq. (8.108) in recursive form and determine the SC factorizationof the resulting recursive equation.
8.17 (a) Show that the difference equation
xpn − xp
n−1 − xpn−2 = c, p > 0, c ∈ R
has a factorization over R with constant coefficients (based on the GoldenRatio) in both the factor and cofactor equations. Determine this factorization.Hint : Let yn = xp
n.(b) If p is a positive integer and c ∈ Q then show that the equation in Part
(a) has a factorization over Q and find this factorization (coefficients may notbe constants).

This page intentionally left blankThis page intentionally left blank

A
Appendix: Asymptotic Stability on the RealLine
A general necessary and sufficient condition that is known for first-order dif-ference equations defined on the set of all real numbers R was referred to in thepreceding chapters. This condition is not yet as widely known as some otherresults mentioned earlier (e.g., the Li-Yorke theorem) so for convenience wepresent it, along with supporting notions and results in this Appendix. Theseresults are taken from Sedaghat (1999); also see Block and Coppel (1992) forrelated results and Sedaghat (2003) for additional details and applications ofthese results.
A.1 An inverse-map characterization
Let f : I → I be continuous (relative to the usual topology) on a nontrivialinterval I which may be unbounded. Let x be an isolated fixed point of f ,i.e., f(x) = x, and let U = (x− ε, x+ ε) be an open interval containing x andno other fixed points of f . Assume that the following condition holds:
|f(x) − x| < |x− x| x 6= x, x ∈ U. (A.1)
Note that the linearization inequality |f ′(x)| < 1 implies (A.1) because ofthe mean value theorem. In fact, through (A.1) that linear stability is proved.
LEMMA A.1
If K is a nontrivial compact interval such that f(K) = K, then K containseither at least two fixed points or a fixed point and a period-2 point.
PROOF Let K = [a, b] where a < b. Then f(a) ≥ a and f(b) ≤ b, sothere is at least one fixed point x in K. If x is unique, then by the hypothesisf(K) = K we conclude that x 6= a, b, f(x) > x for x < x, and f(x) < x forx > x; in fact,
maxa≤x≤x
f(x) = b and minx≤x≤b
f(x) = a.
297

298 Form Symmetries and Reduction of Order
Now consider the iterate f2 on [a, x], and note that f2(K) = K. If f2(a) = a,then we are done; otherwise, f2(a) > a. Since a ∈ f((x, b]) and (x, b] ⊂f([a, x)), it follows that there exists c ∈ (a, x) such that f2(c) = a < c. Thus,there exists a number x∗ ∈ (a, c) such that f2(x∗) = x∗, i.e., x∗ is period-2
point.
DEFINITION A.1 (a) Let x be a fixed point of f and for each subsetA ⊂ I, define the right and left parts of A as
Ar.= A ∩ [x,∞) Al
.= A ∩ (−∞, x].
(b) We denote by fr and fl the restrictions of f to Ir and Il, respectively.Since frIr ⊂ I, the inverse map f−1
r may be generally defined on I if we allowthe empty set as a possible value of f−1
r . With this convention, we concludethat f−1
r (x) ⊂ Ir for all x ∈ I, with a similar conclusion holding for fl andits inverse.
LEMMA A.2
Let ai ∈ Il, bi ∈ f−1r (ai), i = 1, 2. If f(a1) ≥ b1 and f(a2) ≤ b2 then there is c
between b1 and b2 such that f2(c) = c; i.e., the graphs of fl and f−1r intersect
at c and {c, fr(c)} is a 2-cycle.
PROOF Note that fl ◦fr(b1) = fl(a1) ≥ b1 while fl ◦fr(b2) = fl(a2) ≤ b2.Since fl ◦ fr is continuous, there is c between b1 and b2 such that f2(c) =fl ◦ fr(c) = c. Note further that b1, b2, c ∈ Ir , while fr(c) ∈ Il. So (fr(c), c) ∈f−1
r ∩ fl.
LEMMA A.3
If x is an isolated fixed point, then a bounded interval U ⊂ I is a properI-neighborhood of x if:
(i) U is open in I and contains x;(ii) x is the only fixed point of f that is contained in the closure U ;(iii) If a is an endpoint of I, then a ∈ U if and only if a = x.Note in particular that both Ur and Ul contain x and are nonempty; also,
every interval neighborhood of x contains a proper I-neighborhood.
DEFINITION A.2 Let x be an isolated fixed point of f and let U be aproper I-neighborhood of x.
(a) For each x ∈ U define the lower envelope function of f−1r on U as
φ(x).= inf f−1
r (x) = inf{u ∈ Ur : fr(u) = x}.Note that φ(x) ≥ x = inf Ur for all x ∈ U with equality holding if and only
if x = x. By usual convention, φ(x) = ∞ if f−1r (x) is empty.

Appendix 299
(b) For each x ∈ Ul define the upper envelope function of fl as
µ(x).= sup
x≤u≤xfl(u).
Note that µ is bounded on Ul (because U is proper) and µ(x) ≥ f(x) = x forall x ∈ Ul.
The next lemma establishes some of the essential properties of φ and µ.
LEMMA A.4
Let U be a proper I-neighborhood of an isolated fixed point x of f.(a) µ is a continuous and nonincreasing function on Ul with µ(x) ≥ f(x)
for all x ∈ Ul.(b) If φ is real valued on U , then φ is a decreasing function on Ul and an
increasing function on Ur.(c) φ(x) > f(x) for all x ∈ Ul, x 6= x, if and only if φ(x) > µ(x) for all
x ∈ Ul, x 6= x.
PROOF (a) Assume, for nontriviality, that Ul contains points other thanx. It is clear from the definition that µ is nonincreasing and dominates f onUl. To prove µ is continuous, let a ∈ Ul, a 6= x and consider two cases:
Case I. µ(a) > f(a), so there is a least b ∈ (a, x] such that µ(a) = f(b).Choose δ > 0 such that a + δ < b, V = (a − δ, a + δ) ⊂ Ul and f(x) < µ(a)for all x ∈ V . Now, let x ∈ V and note that if x > a then
f(b) ≤ µ(x) ≤ µ(a) = f(b)
while if x < a thenµ(x) = sup
a≤u≤xf(u) = µ(a).
Therefore, µ is constant, hence continuous on V .Case II. µ(a) = f(a); if µ is not continuous at a, let xn → a as n→ ∞ and
first assume (by taking a subsequence if necessary) that there is ε > 0 suchthat µ(xn) − µ(a) ≤ −ε for all n; but then
f(xn) − f(a) ≤ µ(xn) − µ(a) ≤ −ε
for every n, contradicting the continuity of f . So assume (by taking a subse-quence if necessary) that µ(xn) ≥ µ(a)+ ε for all n. Since µ is nonincreasing,it follows that xn < a for all n. For each n define yn ∈ [xn, x] by the equalityf(yn) = µ(xn), and note that
f(yn) > µ(a) > f(x)
for x ∈ [a, x] and all n. Therefore, xn ≤ yn ≤ a for all n, implying thatyn → a as n→ ∞; however, by the definition of yn, f(yn) is not converging to

300 Form Symmetries and Reduction of Order
µ(a) = f(a) which once again contradicts the continuity of f . This completesthe proof of assertion (a).
To prove (b), note that since the sets f−1r (x) are closed, φ(x) ∈ f−1
r (x) forall x ∈ U . Therefore, for each x ∈ U , φ(x) is the smallest number in Ir withthe property that fr(φ(x)) = x. Since fr is continuous and fr(x) = x, theminimality of φ(x) implies that for x ∈ Ul,
fr(y) ≥ x for y ∈ [x, φ(x)] (A.2)
with the inequality reversed for x ∈ Ur . Now, if (b) is false, and there areu, v ∈ Ul, u < v such that φ(u) ≤ φ(v), then φ(u) ∈ [x, φ(v)] with fr(φ(u)) =u < v which contradicts (A.2). The argument for u, v ∈ Ur is similar.
With regard to (c), necessity being clear from the definition of µ, we proceedto prove the sufficiency; i.e., if there is u ∈ Ul such that φ(u) ≤ µ(u), then forsome v ∈ Ul, φ(v) ≤ f(v). Choose v ∈ [u, x] so that µ(u) = f(v). Then byPart (b) and our assumption on u,
φ(v) ≤ φ(u) ≤ µ(u) = f(v)
which is the desired inequality for v.
The next theorem is the key result of this section.
THEOREM A.1
(The Inverse Map Characterization) A fixed point x of f is asymptoticallystable if and only if there is a proper I-neighborhood U of x such that:
{φ(x) > f(x) > x if x ∈ Ul, x 6= x
f(x) < x if x ∈ Ur , x 6= x.(A.3)
PROOF First assume that (A.3) holds. For convenience, we denote Ul −{x} by Uo
l , and similarly for Ur . First assume that f−1r (x) is empty for all
x ∈ Uol (or that Uo
l is empty) so fr(x) ≥ x for all x ∈ Ur . Now if x0 ∈ Uor then
by (A.3), x ≤ fr(x0) < x0 so we conclude by induction that fn(x0) = fnr (x0)
decreases to x from the right. If x0 ∈ Uol then either fk(x0) ≥ x for some
k ≥ 1 or fn(x0) < x for all n ≥ 1. In the former case, assuming without lossof generality that fk(x0) ∈ Uo
r , the sequence { fk+n(x0)} decreases as beforeto x. In the second case, condition (A.3) shows that
x0 < fn−1(x0) < fn(x0) < x
for all n so that the terms fn(x0) increase to x from the left. Next, assumethat f−1
r (u) is nonempty for some u ∈ Uol , in which case f−1
r (x) is nonemptyfor all x ∈ [u, x] by Lemma A.4(b). So we may choose a ∈ Uo
l sufficiently close

Appendix 301
to x such that f−1r (a) is nonemtpy, µ(a) ∈ Ur and thus J = [a, µ(a)] ⊂ U .
We now show that fJ ⊂ J . If x ∈ [a, x], then by (A.3)
a ≤ x < f(x) ≤ µ(x) ≤ µ(a)
so that
f [a, x] ⊂ (a, µ(a)] ⊂ J. (A.4)
Next, suppose that x ∈ [x, µ(a)]. If f(x) ≥ x then by (A.3) f(x) ∈ [x, x) ⊂[x, µ(a)], while if f(x) < x, then (A.3) and Lemma 2.1.3(c) imply that
µ(f(x)) < φ(f(x)) = inf f−1r (fr(x)) ≤ x ≤ µ(a)
which because of the nonincreasing nature of µ implies that f(x) > a. Thus
f [x, µ(a)] ⊂ (a, µ(a)] ⊂ J. (A.5)
Inequalities (A.4) and (A.5) imply that fJ ⊂ J . Now succssive applicationsof f to J yield a decreasing sequence J ⊃ fJ ⊃ f2J ⊃ · · · whose limitK =
⋂∞n=0 f
nJ contains x and is thus nonempty. Since fnJ is a compactinterval for every n, it follows that K is a compact interval and fK = K.Given that x is the only fixed point of f in K ⊂ J ⊂ U , Lemma A.2 impliesthat K = {x}. Hence, x is asymptotically stable.
To prove the converse, suppose that every proper I-neighborhood U of xcontains a point xU such that (A.3) fails at xU . Thus either (I) xU ∈ Uo
r andfr(xU ) ≥ xU , or (II) xU ∈ Uo
l and φ(xU ) ≤ fl(xU) or fl(xU) ≤ xU (here φdefined with respect to some U works for all smaller neighborhoods containedin U). In case (I), the uniqueness of x in U implies that fr(x) > x for allx ∈ (x, xU). But then for every x0 ∈ (x, xU), no matter how close to x, theincreasing sequence
x0 < f(x0) < · · · < fn+1(x0), if fk(x0) < xU , for 1 ≤ k ≤ n
eventually exceeds xU ; it follows that x is not stable. In case (II) the inequalityfl(xU ) ≤ xU implies that x is not asymptotically stable in a manner similar tothat just described for (I). It remains to show that the other inequality in (II)also implies a lack of asymptotic stability. The first inequality in (II) appliedover a sequence {Un} of neighborhoods of x whose diameters approach zero,implies that there is a sequence un → x from the left such that φ(un) ≤ fl(un).Since for each n, φ(un) ≥ x and also fl(un) → x as n → ∞, we conclude thatφ(un) → x. Since for each x ∈ Io
l , f−1r (x)∩Io
l is not empty, two possible casesarise:
Case 1. There is δ > 0 sufficiently small that sup[f−1
r (x) ∩ (x, x+ δ)]<
fl(x) for all x ∈ (x− δ, x); i.e., the graph of f−1r near and to the left of x lies
below the graph of fl. Let x0 ∈ (x, x+δ) and note that fr(x0) < x. If fr(x0) >x − δ, then since x0 ∈ f−1
r (fr(x0)), we see that f2(x0) = fl(fr(x0)) > x0. If

302 Form Symmetries and Reduction of Order
f2(x0) < x + δ, then the preceding argument may be repeated; inductively,the sequence
x0 < f2(x0) < f4(x0) < · · ·is obtained that moves away from x until it exceeds x+δ, no matter how closex0 is to x. Therefore, x is not stable. Now let x0 ∈ (x− δ, x) and note thatfl(x0) > x. Repeating the above argument, the sequence {f2k+1(x0)} is seento increase away from x, and once again x cannot be asymptotically stable.
Case 2. There is a sequence vn → x, vn < x, such that
sup[f−1
r (vn) ∩ [x, x+ 1/(n+ 1)]]≥ fl(vn), n = 1, 2, 3, . . .
i.e., for each n, there is wn ∈ f−1r (vn)∩ [x, x+1/(n+1)] such that wn ≥ fl(vn)
and wn → x as n→ ∞. The conditions of Lemma 2.1.2 are met with a1 = vn,b1 = wn, a2 = un and b2 = φ(un). It follows that there is cn between wn
and φ(un) such that f2(cn) = cn; i.e., there is a sequence of period-2 pointscn → x as n → ∞, and therefore, x is again not asymptotically stable. Thisconcludes the proof.
Condition (A.3) may be thought of as a “right” condition because of f−1r .
There is also a “left” analog of (A.3) which compares f−1l with fr and can be
useful when the left part fl is simpler than the right part fr for the purposeof inversion. These left versions are obtained from the right versions here bymaking a few minor modifications.
A.2 Equivalent necessary and sufficient conditions
The following result presents a few conditions that are equivalent to that inTheorem A.1.
THEOREM A.2
(Asymptotic Stability) Let x be a fixed point of f. The following statementsare equivalent:
(a) x is asymptotically stable;(b) There is a proper I-neighborhood U of x on which the following inequal-
ity holds:
[f2(x) − x](x− x) < 0, x 6= x, x ∈ U ⊂ I (A.6)
(c) There is a proper I-neighborhood U of x on which (A.3) holds;(d) There is a proper I-neighborhood U of x such that:
[f(x) − x](x− x) < 0, x 6= x, x ∈ U ⊂ I (A.7)

Appendix 303
and over Ul − {x}, the graph of f−1r lies above the graph of f;
(e) Inequality (A.7) holds on U , and for the parameterizations of fl andf−1
r given by (xl(t), yl(t)) and (yr(s), xr(s)) respectively, it is ture that:
xl(t) = yr(s) implies xr(s) > yl(t).
(f) There is a proper I-neighborhood U of x such that for x ∈ U − {x},
(φ(x) − f(x))(φ(x) − x)(f(x) − x) (x− x) < 0. (A.8)
PROOF We show that (a)⇒(b)⇒(c)⇒(a) and (c)⇒(d)⇒(e)⇒(f)⇒(c).First, if (a) is true, then there is a sufficiently small I-neighborhood U of x onwhich the equality f2(x) = x holds only at x and every point in U is attractedto x. Hence, the continuous function f2(x)−x either does not change its signover U , or if it does, then the sign change can occur only at x. If f2(x) > x forall x ∈ Uo
r , and x0 ∈ Uor , then f2(x0) > x0; if f2(x0) ∈ Ur also, then another
application of f2 leads further away from x and the process continues untilthe trajectory {f2n(x0)} exits Ur , no matter how close x0 is to x. Thus xcannot be stable, contradicting (a). Similarly, (a) is contradicted if f2(x) < xfor all x ∈ Uo
l . Now (A.6) follows and (b) is established.Next, suppose that (b) is true. Then (A.7) must hold, since otherwise there
is either a fixed point other than x in U at which (b) would be false, or else,f(x) < x (respectively, f(x) > x) for all x < x (respectively, x > x) in U , inwhich case choosing x0 sufficiently close to x so that f(x0) ∈ U implies thatf2(x0) < x0 (respectively, f2(x0) > x0) also, again contradicting (b).
To establish (c), it remains to show that φ(x) > fl(x) for x ∈ Ul. This isclear if φ(x) ≥ a > 0 for all x ∈ Uo
l ; otherwise, arguing as in the last two casesin the proof of Theorem A.1, we conclude that there is either a sequence ofperiod-2 points converging to x from the left, or else, there is x′ ∈ Uo
l closeto x such that x0 = f(x′) ∈ Ur and f2(x0) ∈ Ur with f2(x0) > x0. Sincein either case (b) is contradicted, we must assume that (c) holds. Finally, inTheorem A.1 it was established that (c) implies (a).
Next, note that (d) follows easily from (c) because conditions (A.3) imply(A.7), and by Lemma A.4(c) φ (hence also the graph of f−1
r ) dominates f onUo
l if and only if φ dominates µ, hence also fl. In light of Lemma A.4(c), (e) isjust a rephrasing of (d), hence equivalent to it. Statement (f) is an immediateconsequence of (e), or equivalently (d), which implies that φ(x) > f(x) for allx ∈ U − {x} (for x > x, the graph of f−1
r lies above the identity line if andonly if fr lies below that line).
Finally, assume (f) holds. For x < x, φ(x) > x > x, so if φ(u) < f(u) forsome u < x, then f(u) > x > u and (A.8) fails. Hence φ(x) > f(x) for all x,and so by (A.8) f(x) > x. For x > x, the product (φ(x) − f(x))(φ(x) − x) isalways positive, since both f and the identity line always lie on the same sideof f−1
r . Therefore, by (A.8) f(x) − x < 0 and condition (A.3) is established.

304 Form Symmetries and Reduction of Order
For continuous maps of the real line, Theorem A.2 settles the questionof asymptotic stability conclusively, although it does not explicitly addressinstability, neutral stability, etc. For a detailed discussion of these issues werefer to Sedaghat (2003).

References
Agarwal, R.P. (2000) Difference Equations and Inequalities, 2nd ed., Dekker,New York.
Akin, E. (1993) The General Topology of Dynamical Systems, Amer. Math.Society, Providence.
Alseda, L. and Llibre, J. (1993) “Periods for triangular maps,” Bull. Austral.Math. Soc., 47, 41–53.
Andreassian, A. (1974) “Fibonacci sequences modulo m,” Fibonacci Quart.,12, 51–54.
Bertram, W. (2007) “Difference problems and differential problems,” in Con-temp. Geom. Topol. and Related Topics, Proceedings of Eighth Int. Work-shop on Differential Geometry and its Applications, Cluj-Napoca, 73–87.
Block, L. and Coppel, W.A. (1992) Dynamics in One Dimension, Springer,New York.
Byers, B. (1983) “Topological semiconjugacy of piecewise monotone maps ofthe interval,” Trans. Amer. Math. Soc., 276, 489–495.
Camouzis, E. and Ladas, G. (2008) Dynamics of third-order Rational Differ-ence Equations with Open Problems and Conjectures, Chapman and Hall/CRCPress, Boca Raton.
Ceccherini-Silberstein, T. and Coornaert, M. (2010) Cellular Automata andGroups, Springer, Berlin.
Chan, D.M., Chang, E-R., Dehghan, M., Kent, C.M., Mazrooei-Sebdani, R.and Sedaghat, H. (2006) “Asymptotic stability for difference equations withdecreasing arguments,” J. Difference Eqs. and Appl., 12, 109–123.
Cheng, S.S. (2003) Partial Difference Equations, Taylor and Francis, London.
Dehghan, M., Kent, C.M., Mazrooei-Sebdani, R., Ortiz, N.L., and Sedaghat,H. (2008a) “Dynamics of rational difference equations containing quadraticterms,” J. Difference Eq. Appl., 14, 191–208.
Dehghan, M., Kent, C.M., Mazrooei-Sebdani, R., Ortiz, N.L., and Sedaghat,H. (2008b) “Monotone and oscillatory solutions of a rational difference equa-tion containing quadratic terms,” J. Difference Eq. Appl., 14, 1045–1058.
305

306 Form Symmetries and Reduction of Order
Dehghan, M., Mazrooei-Sebdani, R., and Sedaghat, H. (2011) “Global behav-ior of the Riccati difference equation of order two,” J. Difference Eq. Appl.,in press.
Devaney, R.L. (1989) An Introduction to Chaotic Dynamical Systems, 2nded., Addison-Wesley, Redwood City.
DeVault, R., Ladas, G. and Schultz, S.W. (1998) “On the recursive sequencexn+1 = A/xn + 1/xn− 2,” Proc. Amer. Math. Soc., 126, 3257–3261.
Elaydi, S. (1999) An Introduction to Difference Equations, 2nd ed., Springer,New York.
El-Metwally, H.A., Grove, E.A., Ladas, G., and Voulov, H.D. (2001) “On theglobal attractivity and the periodic character of some difference equations,”J. Difference Eqs. and Appl., 7, 837–850.
Fisher, M.E. and Goh, B.S. (1984) “Stability results for delayed-recruitmentin population dynamics,” J. Math. Biol., 19, 147–156.
Fraleigh, J.B. (1976) A First Course in Abstract Algebra, 2nd ed, Addison-Wesley, Reading.
Franke, J.E., Hoag, J.T., and Ladas, G. (1999) “Global attractivity and con-vergence to a two-cycle in a difference equation,” J. Difference Eqs. and Appl.,5, 203–209.
Gil, M.I. (2007) Difference Equations in Normed Spaces: Stability and Oscil-lations, Elsevier, Amsterdam.
Grove, E.A., Ladas, G., McGrath, L.C., and Teixeira, C.T. (2001) “Existenceand behavior of solutions of a rational system,” Comm. Appl. Nonlin. Anal.,8, 1–25.
Grove, E.A. and Ladas, G. (2005) Periodicities in Nonlinear Difference Equa-tions, CRC Press, Boca Raton.
Gu, E.G, and Ruan, J. (2005) “On some global bifurcations of the domainsof feasible trajectories: An analysis of recurrence equations,” Int’l J. Bifurc.and Chaos, 15, 1625–1639.
Hamaya, Y. (2005) “On the asymptotic behavior of solutions of neuronicdifference equations,” in Proc. Int’l. Conf. on Difference Equations, SpecialFunctions and Appl., Elaydi et al. (editors), World Scientific, 258–265.
Hicks, J.R. (1965) A Contribution to the Theory of the Trade Cycle, 2nd ed.,Clarendon Press, Oxford (First ed. 1950, Oxford University Press, Oxford).
Hungerford, T.W. (1974) Algebra, Springer, New York.
Jordan, C. (1965) Calculus of Finite Differences, 3rd ed., Chelsea, New York.

References 307
Kent, C.M. and Sedaghat, H. (2004a) “Convergence, periodicity and bifur-cations for the 2-parameter absolute-difference equation,” J. Difference Eqs.and Appl., 10, 817–841.
Kent, C.M. and Sedaghat, H. (2004b) “Global stability and boundedness inxn+1 = cxn + f(xn − xn−1),” J. Difference Eqs. and Appl., 10, 1215–1227.
Kocic, V.L. and Ladas, G. (1993) Global Behavior of Nonlinear DifferenceEquations of higher order with Applications, Kluwer, Dordrecht.
Kulenovic, M.R.S. and Ladas, G. (2002) Dynamics of second-order RationalDifference Equations with Open Problems and Conjectures, Chapman andHall/CRC, Boca Raton.
Mickens, R. (1991) Difference Equations, Theory and Applications, 2nd ed.,CRC Press, Boca Raton.
Milnor, J. and Thurston, W. (1977, preprint) “On iterated maps of the inter-val,” I, II in: Lecture Notes in Math., 1342, Springer, New York, 1988.
Morimoto, Y. (1988) “Hopf bifurcation in the simple nonlinear recurrenceequation x(t+ 1) = Ax(t)(1 − x(t− 1)),” Phys. Lett., A134, 179–182.
Morimoto, Y. (1989) “Variation and bifurcation diagram in difference equa-tion x(t + 1) = ax(t)(1 − x(t) − bx(t− 1)),” Trans. IEEIC, 72, 1–3.
Philos, Ch.G., Purnaras, I.K. and Sficas, Y.G. (1994) “Global attractivity ina nonlinear difference equation,” Appl. Math and Comp., 62, 249–258.
Puu, T. (1993) Nonlinear Economic Dynamics, 3rd. ed., Springer, New York.
Renault, M. (1996) “Properties of the Fibonacci sequence under various mod-uli,” Master’s Thesis, Wake Forest University.
Rothe, F. (1992) “Snapback repellers and semiconjugacy for iterated entiremappings,”Manuscripta Math., 74, 299–319.
Samuelson, P.A. (1939) “Interaction between the multiplier analysis and theprinciple of acceleration,” Rev. Econ. Stat., 21, 75–78.
Sedaghat, H. (1997) “A class of nonlinear, second-order difference equationsfrom macroeconomics,” Nonlin. Anal. TMA, 29, 593–603.
Sedaghat, H. (1998) “Bounded oscillations in the Hicks business cycle modeland other delay equations,” J. Difference Eqs. and Appl., 4, 325–341.
Sedaghat, H. (1999) “An inverse map characterization of asymptotic stabilityon the line,” Rocky Mt. J. Math, 29, 1505–1519.
Sedaghat, H. (2003) Nonlinear Difference Equations: Theory with Applica-tions to Social Science Models, Kluwer Academic, Dordrecht.
Sedaghat, H. (2004a) “Periodicity and convergence for xn+1 = |xn − xn−1|,”J. Math. Anal. Appl., 291, 31–39.

308 Form Symmetries and Reduction of Order
Sedaghat, H. (2004b) “On the equation xn+1 = cxn+f(xn−xn−1),” Proc. 7thInt’l. Conf. on Difference Equations and Appl., Fields Inst. Communications,42, 323–326.
Sedaghat, H. (2008) “Reduction of order of separable second-order differenceequations with form symmetries,” Int’l. J. Pure and Applied Math., 47, 155–163.
Sedaghat, H. (2009a) “Every homogeneous difference equation of degree oneadmits a reduction in order,” J. Difference Eqs. and Appl., 15, 621–624.
Sedaghat, H. (2009b) “Global behaviors of rational difference equations oforders two and three with quadratic terms,” J. Difference Eqs. and Appl.,15, 215–224.
Sedaghat, H. (2009c) “Periodic and chaotic behavior in a class of second-orderdifference equations,”, Adv. Stud. Pure Math., 53, 321–328.
Sedaghat, H. (2009d) “Reduction of order in difference equations by semicon-jugate factorizations,” Int’l. J. Pure and Applied Math., 53, 377–384.
Sedaghat, H. (2009e) “Semiconjugate factorizations and reduction of order indifference equations,” http://arxiv.org/abs/0907.3951
Sedaghat, H. (2010a) “Factorizations of difference equations by semiconjugacywith application to nonautonomous linear equations,” http://arxiv.org/abs/1005.2428
Sedaghat, H. (2010b) “Semiconjugate factorization of nonautonomous higher-order difference equations,” Int’l. J. Pure and Applied Math., 62, 233–245.
Sedaghat, H. (2010c) “Reductions of order in difference equations defined asproducts of exponential and power functions”, J. Difference Eqs. and Appl.,1563-5120, in press.
Smital, J. (2008) “Why it is important to understand the dynamics of trian-gular maps,” J. Difference Eqs. and Appl., 14, 597–606.
Strogatz, S.H. (1994) Nonlinear Dynamics and Chaos, Addison-Wesley, Read-ing.
Wall, D.D. (1960) ”Fibonacci series modulo m,” Amer. Math. Monthly, 67,525–532.
Wolfram, S. (1984) Cellular Automata and Complexity: Collected Papers,Addison-Wesley, Reading.

ADVANCES IN DISCRETE MATHEMATICS AND ITS APPLICATIONS
Form SymmetrieS
and reduction oF order in diFFerence
equationS
Fo
rm
Sy
mm
et
rie
S an
d re
du
ct
ion o
F o
rd
er in d
iFFer
en
ce e
qu
at
ion
SS
EDA
GH
AT
HASSAN SEDAGHAT
Form Symmetries and Reduction of Order in Difference Equations presents a new approach to the formulation and analysis of difference equations in which the underlying space is typically an algebraic group. In some problems and applications, an additional algebraic or topological structure is assumed in order to define equations and obtain significant results about them. Reflecting the author’s past research experience, the majority of examples involve equations in finite dimensional Euclidean spaces.
Covering difference equations on groups, the author first illustrates the wide variety of possible formulations and interpretations of difference equations that occur in concrete contexts. He then proposes a systematic method of decomposition for recursive difference equations that uses a semiconjugate relation between maps. The final chapter goes beyond semiconjugacy by extending the fundamental ideas based on form symmetries to nonrecursive difference equations.
Features • Uses form symmetries to define semiconjugate factorizations of
recursive higher-order difference equations and general nonrecursive higher-order difference equations
• Presents many of the main concepts and results using simple algebraic structures, such as groups and fields
• Applies the methods to large classes of difference equations, including nonautonomous and nonhomogeneous linear equations, quadratic difference equations, and separable difference equations
• Includes many new results in print for the first time
With numerous examples and exercises, this book is an ideal introduction to an exciting new domain in the area of difference equations. It takes a fresh and all-inclusive look at difference equations and develops a systematic procedure for examining how these equations are constructed and solved.
Mathematics
K10389
K10389_Cover.indd 1 4/15/11 9:02 AM


![Symmetries in 2HDM and beyond [2mm] Lecture 1: Describing ... · Lecture 2: symmetries in 2HDM Lecture 3: abelian symmetries in bSM models Lecture 4: non-abelian symmetries in NHDM](https://static.fdocuments.net/doc/165x107/6056c24cff523627a22196b1/symmetries-in-2hdm-and-beyond-2mm-lecture-1-describing-lecture-2-symmetries.jpg)