
Fondamenti di automatica - PoliMipolinformatici.it/ARCHIVIO/Fondamenti di Automatica (10-11)...
28
Fondamenti di automatica Un sistema S è caratterizzato da un vettore di ingressi , un vettore che identifica lo stato dello stesso in un determinato istante di tempo ed un unico valore di uscita . I vettori e sono delle n-uple, mentre il sistema in generale si dirà di ordine n. Descrizione dei sistemi Esistono svariati modi per descrivere come varia lo stato interno del sistema e il suo output in base al tempo e all’ingresso: Quaterna Il sistema viene descritto tramite una quaterna e in cui è una matrice di ordine n, due vettori di n elementi e uno scalare. Il valore d rappresenta l’effetto diretto che ha l’ingresso sull’uscita: se vale 0 il sistema si dice proprio altrimenti improprio. Il sistema verrà descritto in forma di un sistema di equazioni: (tempo discreto) (tempo continuo) NB: Si ricorda che indica la derivata di x rispetto al tempo secondo la notazione di Newton Modello ARMA (Autoregressive moving average) Un modello ARMA è descritto dalla seguente disequazione: Dove e sono due polinomi in p, il quale è a sua volta un operatore che assume diversi significati: Nel caso di tempo continuo esso si scrive come s ed indica una derivazione di ordine pari all’esponente a cui esso è elevato. Nel caso di esponente negativo allora esso assumerà il significato di integrale. Es: Nel caso di tempo discreto, invece, esso si scrive come z ed indica un’anticipazione (o posticipazione) pari all’esponente a cui esso è elevato. Es:
-
Upload
trinhduong -
Category
Documents
-
view
258 -
download
2
Transcript of Fondamenti di automatica - PoliMipolinformatici.it/ARCHIVIO/Fondamenti di Automatica (10-11)...

Fondamenti di automatica
Un sistema S è caratterizzato da un vettore di ingressi , un vettore che identifica lo stato dello stesso in un
determinato istante di tempo ed un unico valore di uscita . I vettori e sono delle n-uple, mentre il
sistema in generale si dirà di ordine n.
Descrizione dei sistemi Esistono svariati modi per descrivere come varia lo stato interno del sistema e il suo output in base al
tempo e all’ingresso:
Quaterna
Il sistema viene descritto tramite una quaterna e in cui è una matrice di ordine n,
due vettori di n elementi e uno scalare. Il valore d rappresenta l’effetto diretto che ha l’ingresso
sull’uscita: se vale 0 il sistema si dice proprio altrimenti improprio.
Il sistema verrà descritto in forma di un sistema di equazioni:
(tempo discreto)
(tempo continuo)
NB: Si ricorda che indica la derivata di x rispetto al tempo secondo la notazione di Newton
Modello ARMA (Autoregressive moving average)
Un modello ARMA è descritto dalla seguente disequazione:
Dove e sono due polinomi in p, il quale è a sua volta un operatore che assume diversi
significati:
Nel caso di tempo continuo esso si scrive come s ed indica una derivazione di ordine pari
all’esponente a cui esso è elevato. Nel caso di esponente negativo allora esso assumerà il significato
di integrale.
Es:
Nel caso di tempo discreto, invece, esso si scrive come z ed indica un’anticipazione (o
posticipazione) pari all’esponente a cui esso è elevato.
Es:

Funzione di trasferimento
Un modello descritto tramite la sua funzione di trasferimento specifica direttamente come varia
l’uscita al variare dell’ingresso mediante una semplice equazione della forma:
è una frazione assegnata in varie forme:
Dove è detta costante di trasferimento, è detto zero i-esimo mentre polo i-esimo
Dove è detto guadagno
I poli e gli zeri sono dei numeri complessi e come tali potranno essere indicati usando il piano di
Gauss. Per ogni polo o zero con parte immaginaria non nulla esisterà anche il suo coniugato.
I poli in generale rappresentano quei valori per i quali la funzione di trasferimento è , viceversa,
gli zeri rappresentano quelli che la annullano.
Esempi notevoli:
Un integratore è un nodo la cui uscita è pari all’integrale del segnale in ingresso: la sua funzione di
trasferimento è pari a
Un condensatore di capacità C ha una fdt pari a
Un corpo di massa m che si muove senza attrito soggetto ad una forza u ha una fdt pari a
Un serbatoio in cui viene immesso un volume d’acqua u e dal quale esce un volume pari ad y
secondo una costante di tempo T ha fdt pari a
Un ritardatore è un nodo che introduce un ritardo sull’uscita y quando si cerca di trasferire un
segnale u in ingresso. La sua fdt è pari a

Equazioni di stato quaterna Analizziamo il caso a tempo continuo (quello a tempo discreto è del tutto identico):
Il sistema è descritto da n equazioni di stato della forma:
Le quali descrivono la variazione dello stato del sistema per ogni istante di tempo più una supplementare
che indica, invece, la variazione dell’uscita rispetto allo stato interno:
La conversione in quaterna è molto semplice, basta considerare che:
I termini rappresentano le celle della matrice A
I termini rappresentano i valori del vettore b
I termini rappresentano i valori del vettore
Il termine è il valore di d.
Modello ARMA quaterna (Realizzazione) Prima di descrivere il metodo occorre precisare che il modello ARMA descrive la variazione dell’ingresso
rispetto all’uscita ignorando del tutto lo stato interno di alcuni pezzi del sistema (nello specifico il modello
ARMA non ci fornisce informazioni circa le variabili di stato che non influiscono direttamente o
indirettamente l’uscita e, pertanto, la relizzazione è un procedimento non univoco).
Siano dati
Per la realizzazione in forma canonica di ricostruzione la quaterna è costruita come segue:
Dove
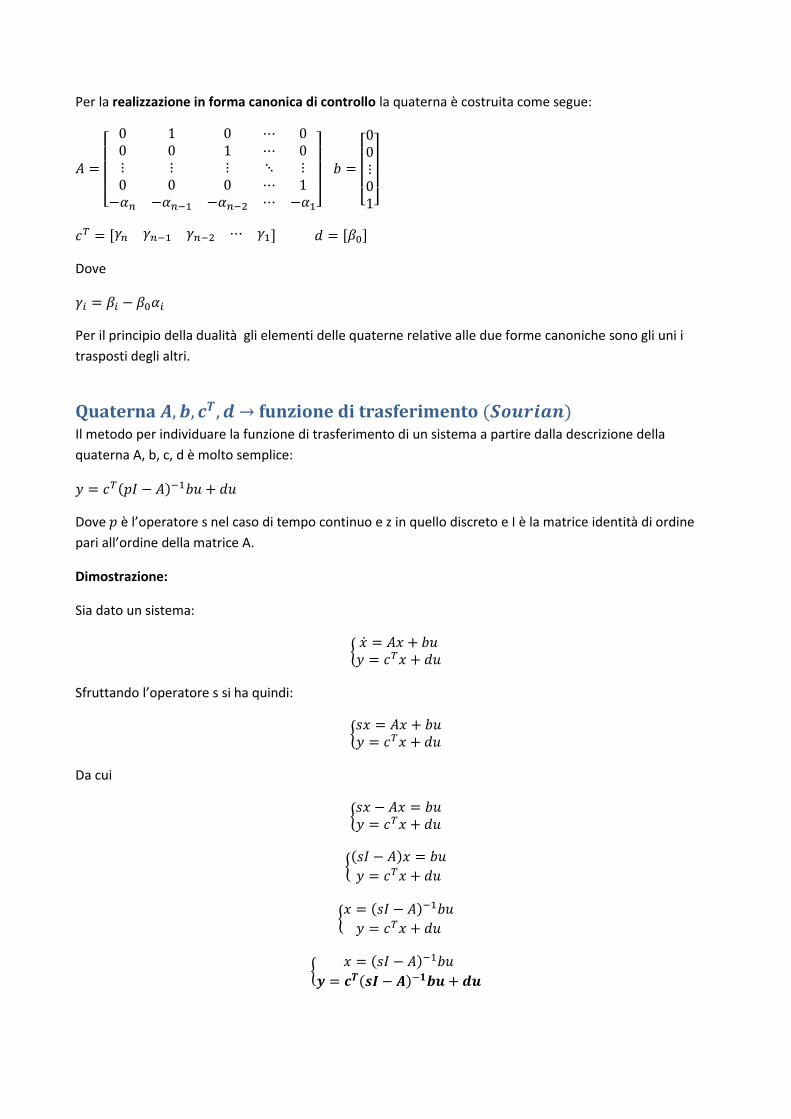
Per la realizzazione in forma canonica di controllo la quaterna è costruita come segue:
Dove
Per il principio della dualità gli elementi delle quaterne relative alle due forme canoniche sono gli uni i
trasposti degli altri.
Quaterna funzione di trasferimento Il metodo per individuare la funzione di trasferimento di un sistema a partire dalla descrizione della
quaterna A, b, c, d è molto semplice:
Dove è l’operatore s nel caso di tempo continuo e z in quello discreto e I è la matrice identità di ordine
pari all’ordine della matrice A.
Dimostrazione:
Sia dato un sistema:
Sfruttando l’operatore s si ha quindi:
Da cui

Aggregati di sottosistemi – Formula di Mason La formula di Mason permette di calcolare la funzione di trasferimento di un generico aggregato di
sottosistemi mediante la seguente:
Dove è la fdt totale di ciascun cammino diretto (visto che tutti i sottosistemi di un cammino diretto sono
disposti in cascata la fdt totale è pari al prodotto delle singole fdt),
è il determinante dell’intero aggregato calcolato come segue:
Dove nella prima sommatoria è pari alla fdt totale dell’i-esimo cammino chiuso (loop).
La seconda sommatoria, la terza e così via, invece, seguono la stessa logica della prima solo che si
restringono a tutte le coppie (le terne, le quaterne e così via) di anelli che non si toccano (non condividono
cioè almeno un nodo).
, invece, è il determinante ridotto rispetto al k-esimo cammino diretto e si calcola in maniera analoga a
in cui tutti i termini che utilizzano il cammino diretto k-esimo non sono presenti.
Funzione di trasferimento per alcuni esempi di aggregati:
Sottosistemi in cascata (o in serie) hanno fdt totale pari al prodotto delle singole fdt, ovvero
.
Sottosistemi in parallelo, invece, hanno fdt totale pari alla loro somma, ovvero .
Due sottosistemi in retroazione (l’ingresso del 1° sottosistema è pari all’ingresso del 2°, l’ingresso u
viene applicato all’ingresso di quest’ultimo e l’uscita dell’intero sistema è l’uscita di quest’ultimo è
pari a

Cambiamento di coordinate e sistemi equivalenti Sia dato un vettore rappresentante coordinate in uno spazio n-dimensionale e un vettore
rappresentante le coordinate del vettore x in un altro spazio n-dimensionale.
La matrice che permette il cambio di coordinate è la matrice T di ordine n tale per cui valga:
Sia data una matrice di cambio di coordinate T, i seguenti due si dicono sistemi equivalenti:
Sistema 1:
Sistema 2: , d]
Ciclo ed equilibrio Se l’ingresso u(t) di un sistema è periodico di periodo T (ie: ) e x(t) è periodica di periodo T
allora alche l’uscita è periodica dello stesso periodo. Un sistema siffatto si dice in regime periodico:
descrivendo la traiettoria del sistema nello spazio di stato (un spazio n-dimensionale in cui ogni asse
rappresenta i valori di ) otterremo un ciclo chiuso.
NB: Una funzione costante è periodica di periodo infinitesimale.
Se per un determinato valore di ingresso lo stato è costante e pari a per qualsiasi valore di t,
allora il sistema si dice in regime stazionario. Il corrispondente stato si dice stato di equilibrio e
rappresenta un unico punto nello spazo di stato del sistema.
Determinazione dello stato di equilibrio E’ possibile trovare lo stato di equilibrio di un sistema continuo come segue:
(Tempo continuo)
Il termine si dice guadagno.
(Tempo discreto)
Il termine si dice guadagno.

Calcolo del guadagno
Il guadagno indicato con si calcola come
.
NB: Se l’equilibrio esiste esso è unico.

Formula di Lagrange La formula di Lagrange permette di stabilire l’andamento dello stato del sistema evidenziando il
movimento libero (ovvero la variazione di stato spontanea del sistema non sottoposto ad alcun ingress) ed
il movimento forzato (ovvero quello dipendente dal solo ingresso).
La matrice si dice matrice di transizione.
Dimostrazione:
(Tempo discreto)
...
(Tempo continuo – la dimostrazione è analoga)

Principio di sovrapposizione Il principio asserisce che sommando le cause si sommano anche gli effetti
Causa 1:
Causa 2:
Effettuando una combinazione lineare otteniamo pertanto:
Reversibilità Se è possibile ricavare lo stato x(0) noto x(t) e
allora il sistema si dice reversibile.
In generale un sistema si dice reversibile se è possibile invertire la matrice :
I sistemi a tempo continuo sono tutti reversibili perchè è sempre invertibile perchè vale
I sistemi a tempo discreto sono reversibili sse A è invertibile e quindi sse
Sistemi a memoria finita Se per un dato valore di finito di t il sistema non conserva traccia della sua storia passata
(matematicamente parlando esiste un valore di t tale per cui vale ) allora il sistema si dice a
memoria finita.
I sistemi a tempo continuo non sono mai a memoria finita perchè non si azzera per t
finito
Un sistema a memoria finita non è mai reversibile questo perchè se il prodotto si annulla
per allora la matrice è singolare (ha determinante nullo).

Stabilità Se tende a zero per allora si parla di asintotica stabilità.
Se rimane limitato ma non tende a zero allora si parla di semplice stabilità.
Se è illimitato per qualche x(0) allora si parla di instabilità.
Esistono due forme diverse di instabilità:
Instabilità debole: va all’infinito con legge polinomiale
Instabilità forte: va all’infinito con legge esponenziale
Osservazioni:
Un sistema asintoticamente stabile dimentica il proprio passato, questo perchè nell’approssimare
un valore finito il contributo iniziale di x(0) diventa sempre più esiguo
I sistemi instabili presentano alcune variabili di stato che tendono all’infinito e per questo sistemi di
questo tipo non sopravvivono a lungo (basti pensare ad una tensione che tende all’infinito...)
La stabilità non implica necessariamente una proprietà positiva: se una popolazione è stabile allora
essa si estingue...
Un sistema è asintoticamente stabile sse per ogni ingresso esiste un solo stato di equilibrio
vero il quale tendo il sistema per qualsiasi se .

Analisi della stabilità
Metodo delle simulazioni Per un sistema di ordine n il metodo consiste nell’effettuare al più n simulazioni.
Sia
Il metodo consiste nel verificare se ciascuna variabile “esplode” in un tempo infinito o meno
i-esima simulazione
Si pone x(0) pari al vettore colonna nullo in cui l’i-esimo elemento è pari ad 1.
Si verifica il valore di x(t) usando la formula di cui sopra per : se esso tende a zero si procede con la
(i+1)-esima simulazione altrimenti il sistema non può essere asintoticamente stabile e quindi le simulazioni
terminano.
Se, giunti alla n-esima simulazione, si ottiene che x(t) tende a zero allora il sistema è asintoticamente
stabile.
NB: Statisticamente parlando, se si sceglie casualmente un valore x(0) e x(t) tende a zero allora la
probabilità che il sistema sia asintoticamente stabile è circa uguale ad 1.
Metodo degli autovalori Sia A la matrice di cui si conoscono gli autovalori possiamo concludere che:
A è asintitocamente stabile se e solo se:
A è fortemente instabile se e solo se:

Geometria del movimento libero Sia dato un sistema del II ordine e a tempo continuo in cui gli autovalori risultano entrambi reali. A seconda
della loro positività avremo che:
Il nodo è stabile se entrambi gli autovalori sono negativi (lo stato del sistema converge sul nodo)
Il nodo è sella se gli autovalori sono discordi (il sistema sembra convergere ma in prossimità del
nodo esplode)
Il nodo è instabile se gli autovalori sono concordi positivi (lo stato del sistema esplode sempre)
Per visualizzare la traiettoria degli stati è sufficiente considerare l’autovettore relativo all’autovalore: se
questi è negativo allora la traiettoria converge verso l’origine, altrimenti diverge verso l’infinito.
Se uno degli autovalori è nullo avremo che:
Il sistema ha una retta di stati di equilibri se l’altro autovalore è negativo (tutti gli stati convergono
sulla retta e quindi il sistema ha infiniti stati di equilibrio)
Il sistema ha una retta di stati divergenti se l’altro autovalore è positivo (tutti gli stati si allontanano
in maniera perpendicolare rispetto alla retta descritta dal primo autovalore)
Se entrambi gli autovalori sono nulli allora tutti gli stati sono di equilibrio.
Se gli autovalori sono complessi (necessariamente coniugati) avremo che le singole traiettorie descritte
dagli autovalori sono delle sinusoidi modulate esponenzialmente (basti considerare che i numeri complessi
possono essere scritti nella forma .
In questo caso se la parte reale degli autovalori è positiva lo stato diverge rispetto al nodo spiraleggiando
intorno ad esso, se è negativa, invece, lo stato converge rispetto allo stesso spiraleggiando. In questi due
casi diremo che il nodo è fuoco stabile e fuoco instabile rispettivamente.
Se gli autovalori hanno parte reale nulla allora le traiettorie non convergono nè divergono dal fuoco ma
descrivono un’ellisse attorno al fuoco. In questo caso qualsiasi distanza dal fuoco dà luogo ad un ellisse di
equilibrio.
Test di asintotica stabilità Sia dato un sistema di ordine n descritto dalla quaterna .
Se il sistema descritto è a tempo continuo:
il sistema è instabile
In ogni altro caso non posso trarre conclusioni
Se il sistema descritto è a tempo discreto, invece:
il sistema è instabile
In ogni altro caso non posso trarre conclusioni

Asintotica stabilità per i sistemi di II ordine Un sistema di secondo ordine è asintoticamente stabile se valgono
La dimostrazione è semplice in quanto se la traccia è minore di zero, significa che la somma degli autovalori
è negativa, tuttavia siccome il loro prodotto deve essere positivo (in ragione del fatto che il determinante lo
è) allora essi saranno entrambi negativi.
Criterio di Hurwitz Sia dato un sistema di ordine n descritto dalla seguente
Al quale è associato il seguente polinomio caratteristico
Costruiamo una matrice H di ordine n definita come segue:
(Ogni riga inzia con un valore dispari a partire da 1)
Si considerino ora i determinanti di tutte le sottomatrici che è possibile estrarre da H purchè inizino
dall’angolo nord-ovest. Se il determinante di tutte queste è positivo allora il sistema è asintoticamente
stabile e viceversa.
Costante di tempo dominante Sia dato un sistema descritto dalla seguente i cui autovalori sono .
Per ogni autovalore è possibile associare una costante di tempo che determina l’andamento dello stato in
funzione del tempo:
A seconda dell’autovalore considerato, avremo che l’andamento della traiettoria sarà descritto da
Il movimento libero di uscita è dato da
NB In generale sui tempi lunghi una delle esponenziali domina su tutte le altre che quindi diventano
trascurabili

Per i sistemi a tempo continuo l’autovalore dominante è quello con parte reale maggiore, mentre la
costante di tempo dominante è definita come
Per i sistemi a tempo discreto l’autovalore dominante è quello con modulo maggiore, mentre la costante
di tempo dominante è definita come
Tempo di dimezzamento Generalmente per indicare l’andamento di un’esponenziale può essere conveniente usare il tempo di
dimezzamento invece che la normale costante di tempo: essa indica quanto tempo occorre prima che il
valore dell’esponenziale si dimezzi rispetto al valore attuale. Essa è definita come:
Stabilità dei sistemi aggregati Due sistemi costituiti rispettivamente da sottosistemi in serie o in parallelo sono asintoticamente stabili se
e solo se sono tali anche quest’ultimi.
Regola delle tre costanti di tempo Se il sistema è costituito da sistemi in retroazioni l’analisi dell’asintotica stabilità non è semplice, tuttavia
riconosciamo un caso “notevole” in cui vi sono due sottosistemi in serie ed il terzo che porta l’uscita del
secondo all’ingresso del primo (il terzo sottosistema determina la retroazione). Tutti i sottosistemi agiscono
come dei serbatoi, possiedono delle costanti di tempo e al numeratore hanno tre valori distinti
.
Un sistema così formato è asintitocamente stabile se vale

Dualità Sia dato un sistema
Il sistema duale è definito come
Raggiungibilità Un sistema è completamente raggiungibile se, agendo opportunamente sugli ingressi, è possibile
raggiungere in un tempo finito qualsiasi stato.
Un sistema è completamente raggiungibile se e solo se i seguenti vettori formano una base
NB Creando una matrice in cui tutte le colonne sono i vettori di cui sopra dovremo sinceraci che il
determinante sia diverso da zero.
Legge di controllo Un sistema si dice controllato se esiste un blocco di retroazione che modifica l’ingresso del suddetto in
base ai valori assunti dall’uscita.
L’ingresso del sistema controllato sarà della forma dove è un vettore fissabile ad
arbitrio.
Sostituendo nel sistema il nuovo valore assunto da u(t) si ha che un sistema controllato è definibile
mediante la quaterna .
NB: Se il sistema da controllare è completamente raggiungibile, allora l’inserimento di un blocco di
controllo permette di impostare ad arbitrio tutti gli autovalori del sistema controllato modificando
esclusivamente i valori del vettore (per renderlo asintoticamente stabile, ad esempio).
Osservabilità Un sistema di dice completamente osservabile se si riesce a determinare il valore a partire dalla
coppia ( per un qualche valore di t.
Un sistema è completamente osservabile se e solo se i seguenti vettori formano una base
NB: Un sistema è completamente osservabile se il suo duale è completamente raggiungibile.
NB: Un sistema è completamente raggiungibile se il suo duale è completamente osservabile.

Ricostruzione dello stato Sia dato un sistema della forma:
Il sistema ricostruito, sarà :
Dove l è un parametro di progettazione del sistema di ricostruzione.
Chiamiamo errore di ricostruzione .
Se per tendente ad infinito l’errore tende a zero allora il sistema ricostruito è asintitocamente stabile.
Il sistema ricostruito è definibile tramite la quaterna .
Scomposizione in parti Un sistema può essere scomposto al più:
Parte raggiungibile ma non osservabile
Parte raggiungibile e osservabile
Parte non raggiungibile e non osservabile
Parte non raggiungibile ma osservabile


Poli e zeri di aggregati di sistemi Supponendo che nella funzione di trasferimento numeratore e denominatore sono coprimi allora si ha che:
Per sistemi in cascata i poli e gli zeri sono l’unione di tutti i poli e degli zeri
Per sistemi in parallelo i poli sono l’unione di tutti i poli
Per sistemi in retroazione gli zeri sono la riunione di tutti gli zeri della linea in andata e i poli della
linea di retroazione
La ricerca degli zeri per sistemi in parallelo e dei poli per sistemi in retroazione non è immediata.
Risposte canoniche Le risposte canoniche di un sistema sono le risposte ad alcuni ingressi canonici quali implusi, scalini,
rampe, sinusoidi.
In generale è utile conoscere le risposte canoniche in quanto in un sistema reale gli ingressi sono
generalmente canonici, perchè è possibile determinare tramite essi poli e zeri del sistema e perchè è
possibile prevedere la risposta del sistema ad ingressi non canonici.
NB: L’impluso è la derivata dello scalino, mentre quest’ultimo è la derivata della rampa.
Risposta all’impulso Per valutare correttamente la risposta all’impulso è necessario che .
Valutando il caso di un sistema improprio a tempo continuo possiamo subito notare che l’impulso si
trasmette istantaneamente sull’uscita. Tramite la formula di Lagrange sappiamo che:
Nel caso specifico in cui si ottiene
NB: L’integrale di un impulso per un istante di tempo infinitesimo è 1 per definizione!
Per quanto detto sopra si ha quindi che un impulso applicato ad un sistema improprio porta il sistema nello
stato b in un istante di tempo infinitesimo.
Per t>0 il sistema non è soggetto a ingressi e quindi è in moto libero evolvendo secondo la legge .

Integrale di convoluzione L’integrale di convoluzione è definito come
Trasformata di Laplace La trasformata di Laplace è una trasformazione lineare che permette di trasformare una funzione reale di
variabile reale in una funzione di variabile complessa di variabile complessa.
La trasformazone di cui sopra (invertibile) è definita come
L’antitrasformazione invece è molto complicata e non la citiamo.
Esempi notevoli di trasformazione
Integrazione:
Derivazione:
Ritardo:
Convoluzione:
Trasformata zeta La trasformata zeta è una trasformazione lineare che permette di trasformare una funzione reale di
variabile intera in una funzione complessa di variabile complessa
La trasformazione è definita come:
Esempi notevoli di trasformazione
Ritardo:
Anticipo:

Risposta allo scalino In generale si ha che
Se all’infinito il valore di y si assesta a allora il sistema raggiunge l’equilibrio dopo 5 volte la costante di
tempo dominante ( ).
Poli complessi coniugati danno contributi del tipo:
Se i poli complessi coniugati sono dominanti allora esistono infiniti minimi e massimi (la risposta continua
ad oscillare fino ad attestarsi ad un valore oppure fino ad esplodere).
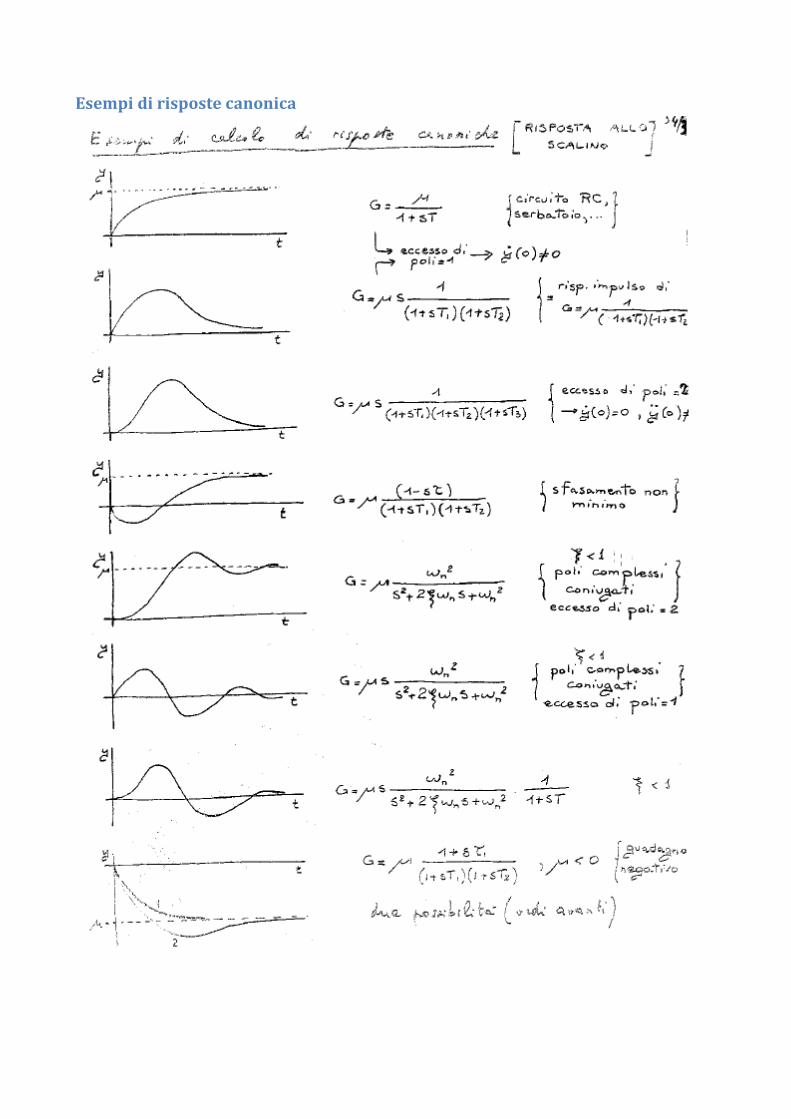
Esempi di risposte canonica

Poli e zeri reali Se un sistema possiede solo zeri e poli reali allora è possibile calcolare il numero di estremi (massimi e
minimi) relativi alla risposta allo scalino del sistema considerando che:
Dove è il numero di zeri superiori (numero di zeri oltre il polo maggiore), è il numero di zeri mal
inquadrati (se si considera una finestra compresa tra due poli, gli zeri mal inquadrati sono tutti quegli zeri
che in quella finestra hanno un numero di zeri alla loro destra diverso dal numero di zeri alla loro sinistra) e
è il numero di estremi (massimi e minimi) cercato.
NB: N è dispari se è dispari. N è pari se è pari.

Regime periodico Fissato un certo valore di (ingresso periodico di periodo T), esisterà uno ed un solo regime periodico
se e solo se
NB: La precedente è vera se il sistema non ha autovalori “critici” con parte reale nulla (tempo continuo) o
con modulo unitario (tempo discreto). Un sistema siffatto si dice anche iperbolico.
Se l’ingresso è periodico ma lo stato iniziale è uno qualsiasi non è detto che l’uscita sia a sua volta periodica.
Se, tuttavia, il sistema è asintoticamente stabile l’uscita tende a quella periodica dopo 5 volte la costante di
tempo dominante.
Serie di Fourier Una qualsiasi funzione periodica può essere interpretata come la somma di infiniti segnali sinusoidali e
cosinusoidali, ovvero:
Dove i coefficienti valgono rispettivamente:

Risposta in frequenza Dato un sistema completamente raggiungibile ed osservabile, ad ogni ingresso sinusoidale
corrisponde un’unica uscita sinusoidale se e solo se :
.
Nel caso di cui sopra si ha pertanto che e .
La coppia è definita risposta in frequenza del sistema.
Consideriamo la relazione che lega il guadagno del sistema con la risposta in frequenza:
Da cui si ricava che R è il modulo del guadagno è il suo argomento.
In generale, sia data una funzione di trasferimento si ha che il modulo del guadagno è e il suo
argomento è .
Poli complessi In generale se la funzione di trasferimento ammette dei poli complessi coniugati si avrà al denominatore un
termine del tipo , dove , dove pulsazione naturale rappresenta la parte reale el
polo, e dove è detto smorzamento.
Sapendo e , è possibile trovare i due poli risolvendo l’equazione di secondo grado di cui sopra. Si ha
pertanto che:
Se allora i poli sono complessi (altrimenti sono due poli reali e allora la precedente può essere
scomposta come .
Se allora il polo è stabile.
L’ampiezza dell’oscillazione determinata dai poli complessi e coniugati si smorza (o aumenta) con il passare
del tempo, tuttavia la sua frequenza di oscillazione rimane costante e pari a :
Frequenza di risonanza Una pulsazione si dice di risonanza se ha un massimo locale per . In termini analitici
pertanto:
In generale le frequenze di risonanza si trovano in prossimità della frequenza naturale del polo:
Il picco di risonanza sarà pari a
.

Decibel Il valore G (purchè maggiore di 0) può essere espresso in termini di decibel mediante la seguente
trasformazione:
Diagrammi di Bode Un diagramma si dice di Bode se rappresenta il guadagno (o lo sfasamento) in funzione della pulsazione
considerando però non un andamento lineare di quest’ultima ma logaritmico (ogni intervallo rappresenta
una decade).
Considerando i diagrammi di Bode del guadagno si ha che ogni zero incrementa la pendenza della retta del
modulo di 20dB ogni decade, mentre introduce uno sfasamento di +90° a partire da una decade prima.
Viceversa, un polo decrementa la pendenza della retta del modulo di 20dB per decade ed introduce uno
sfasamento di -90° a partire da una decade prima.
NB: Poli e zeri alla stessa pulsazione si annullano a vicenda, più poli (o più zeri) ad una stessa frequenza
sommano i loro effetti.
Non esistono guadagni negativi: in tal caso nel diagramma del modulo figurerà il modulo di tale valore e nel
diagramma di fase verrà introdotto uno sfasamento di -180°.
Spettri di potenza Lo spettro di potenza di un segnale indica a che frequenza è allocata l’energia generata da quest’ultimo.
Gli spettri di potenza si misurano in decibel di potenza mediante la trasformazione
Banda passante Definiamo banda passante di un sistema l’insieme di tutte quelle pulsazioni all’interno del
quale
Osservando il diagramma di Bode è immediato individuare la banda passante in quanto essa è il segmento
a frequenza più alta.

Approssimazione di Bode (Modulo)
Considerando che il polo o lo zero si trova in corrispondenza della pulsazione
.
L’approssimazione suggerita da Bode consiste nel considerare G=1 per
e
per
.
NB: In prossimità del valore
l’approssimazione risulta essere soggetta ad un errore del 40% (mentre in
termini di decibel esso sarà pari a circa 3db) !!!
Approssimazione di Bode (Fase)
Nel caso dello sfasamento, l’approssimazione effettuata sarà pari a 0 se
e pari a
se
.
Sia dato
Il valore esatto dello sfasamento è
In generale è meglio usare il regolo delle fasi, fissandolo nella frequenza d’interesse e sommando tutti i
contributi degli zeri e sottraendo tutti quelli dei poli.
Risposta in frequenza di aggregati (di due sottosistemi) Se i sistemi sono in serie, la risposta in frequenza equivalente è la somma delle singole risposte in
frequenza
Se i sistemi sono in parallelo, la risposta in frequenza equivalente è graficamente la spezzata che
maggiora tutte le risposte in frequenza.
Se i sistemi sono in retroazione (due blocchi, uno in linea diretta e l’altro in retroazione), la risposta
in frequenza equivalente è graficamente la spezzata che minora la risposta delle singole risposte in
frequenza (considerando che se la linea di retroazione viene sottratta all’ingresso allora si
considererà la simmetrica orizzontale).

Diagrammi polari (Diagrammi di Nyquist) Sia data una funzione di trasferimento G(s), o nella sua forma polare .
Un diagramma polare (o di Nyquist) è un diagramma di Gauss in cui ogni punto rappresenta uno stato del
sistema in funzione della pulsazione . In generale i punti e sono evidenziati in quanto
rappresentano il guadagno statico del sistema e quello a frequenza infinita (impulso)
Considerando un sistema retroazionato si ha che
Dove numero di poli instabili ad anello chiuso,
è il numero di poli instabili ad anello aperto e
è il numero di giri in senso antiorario nel diagramma di Nyquist dell’anello aperto intorno al punto
(-1;0).
NB: Il diagramma considerato è l’unione tra il diagramma polare e il suo speculare orizzontale!!!
Un sistema ad anello chiuso è esternamente stabile se e solo se .
Un sistema ad anello aperto è esternamente stabile se e solo se
In questo caso supponendo che ci sia un -1 all’interno dell’anello più piccolo, si ha che .
Margine di fase Definiamo margine di fase l’angolo con cui la retta di stato interseca la circonferenza di raggio unitario
Se il margine di fase è maggiore di 0 allora il sistema è stabile, in generale è bene che esso sia superiore ad
una certa soglia, come ad esempio 45° o 60°…
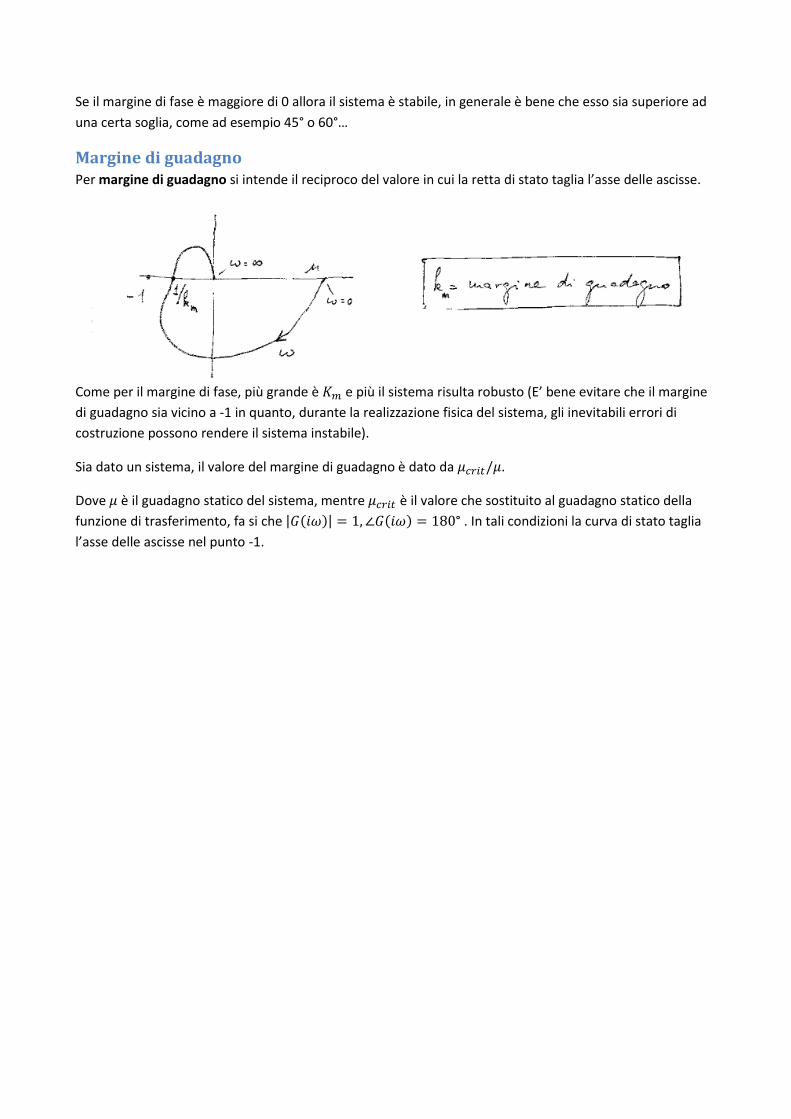
Margine di guadagno Per margine di guadagno si intende il reciproco del valore in cui la retta di stato taglia l’asse delle ascisse.
Come per il margine di fase, più grande è e più il sistema risulta robusto (E’ bene evitare che il margine
di guadagno sia vicino a -1 in quanto, durante la realizzazione fisica del sistema, gli inevitabili errori di
costruzione possono rendere il sistema instabile).
Sia dato un sistema, il valore del margine di guadagno è dato da .
Dove è il guadagno statico del sistema, mentre è il valore che sostituito al guadagno statico della
funzione di trasferimento, fa si che ° . In tali condizioni la curva di stato taglia
l’asse delle ascisse nel punto -1.






![Laboratorio di Fondamenti di Automatica Ingegneria Elettrica ...Laboratorio di Fondamenti di Automatica Ingegneria Elettrica Sessione 3/3 Danilo Caporale [caporale@elet.polimi.it]](https://static.fdocuments.net/doc/165x107/60beba1ec24c1377aa582d58/laboratorio-di-fondamenti-di-automatica-ingegneria-elettrica-laboratorio-di.jpg)











