
Fluid-Structure Coupling for Aeroelastic...
104
Fluid-Structure Coupling for Aeroelastic Computations in the Time Domain using Low Fidelity Structural Models LiangKan Zheng Master of Engineering Department of Mechanical Engineering McGill University Montreal, Quebec, Canada 2005-10-17 A thesis submitted to McGill University in Partial Fulfillment of the Requirements for the Degree of Master of Engineering @L.K. Zheng 2005
Transcript of Fluid-Structure Coupling for Aeroelastic...

Fluid-Structure Coupling for Aeroelastic Computations in the Time Domain using Low
Fidelity Structural Models
LiangKan Zheng
Master of Engineering
Department of Mechanical Engineering
McGill University
Montreal, Quebec, Canada
2005-10-17
A thesis submitted to McGill University in Partial Fulfillment of the Requirements for the Degree of Master of Engineering
@L.K. Zheng 2005
1+1 Library and Archives Canada
Bibliothèque et Archives Canada
Published Heritage Branch
Direction du Patrimoine de l'édition
395 Wellington Street Ottawa ON K1A ON4 Canada
395, rue Wellington Ottawa ON K1A ON4 Canada
NOTICE: The author has granted a nonexclusive license allowing Library and Archives Canada to reproduce, publish, archive, preserve, conserve, communicate to the public by telecommunication or on the Internet, loan, distribute and sell th es es worldwide, for commercial or noncommercial purposes, in microform, paper, electronic and/or any other formats.
The author retains copyright ownership and moral rights in this thesis. Neither the thesis nor substantial extracts from it may be printed or otherwise reproduced without the author's permission.
ln compliance with the Canadian Privacy Act some supporting forms may have been removed from this thesis.
While these forms may be included in the document page count, their removal does not represent any loss of content from the thesis.
• •• Canada
AVIS:
Your file Votre référence ISBN: 978-0-494-25023-5 Our file Notre référence ISBN: 978-0-494-25023-5
L'auteur a accordé une licence non exclusive permettant à la Bibliothèque et Archives Canada de reproduire, publier, archiver, sauvegarder, conserver, transmettre au public par télécommunication ou par l'Internet, prêter, distribuer et vendre des thèses partout dans le monde, à des fins commerciales ou autres, sur support microforme, papier, électronique et/ou autres formats.
L'auteur conserve la propriété du droit d'auteur et des droits moraux qui protège cette thèse. Ni la thèse ni des extraits substantiels de celle-ci ne doivent être imprimés ou autrement reproduits sans son autorisation.
Conformément à la loi canadienne sur la protection de la vie privée, quelques formulaires secondaires ont été enlevés de cette thèse.
Bien que ces formulaires aient inclus dans la pagination, il n'y aura aucun contenu manquant.

ACKNOWLEDGEMENTS
I would like to express my sincere gratitude to Professor Siva Nadarajah for bis sup
port and guidance throughout tbis work. He has given me considerable freedom and shown
patience as I pursed the idea development in this project. I would also like to thank Pro
fessor Wagdi Habishi for bis suggestions for this project. I have enjoyed the encouragement
and warm company of my colleague in the CFD lab at McGill University. Special thanks
to Dr. Claude Lepage and Dr. Remaki Lakhdar for their ideals and helpful technical
discussion. I thank Dr. Kasidit Leoviriyakit for bis encouragement. I also thank my fellow
students for useful discussion with them. Further, I would like to extend my gratitude to
Martin Aubé, Dr. Guido S. Baruzzi, Nabil Ben Abdallah, Hongzhi Wang of Newmerical
Technologies International for their helping with my research. Above all, I thank Ping Li,
my wife and friend, her love and support make my life more beautiful and meaningful.
ii
ABSTRACT
Flutter analysis plays an important role in the design and development of aircraft
wings because of the information it provides regarding the flight envelope of the aircraft.
With the coupling of the flow and structural solver, the flutter boundary of wings can
be evaluated in the time domain. This study: First, computes the aeroelastic response
for a typical sweptback wing section model by coupling a flow solver and a two degree
of freedom structural equation of motion solver to predict the flutter boundary of an
airfoil at different Mach numbers. The results agree well with previous numerical results,
and the transonic-dip phenomenon can be observed. Second, a new coupling approach is
introduced to conservatively transfer the load and displacement between the flow solver
and the structural solver for 3-D flow. By coupling the flow solver and a low fidelity finite
element structural model, the flutter point of AGARD wing 445.6 at Mach number 0.499 is
computed. The Hutter point agrees well with experimental results and previous numerical
results.
iii

RÉSUMÉ
L'analyse d'oscillations joue un rôle important dans le design et le développement
des ailes d'avion puisqu'elle fournit une information précieuse de l'enveloppe de vol de
l'avion. Avec l'agencement des solveurs d'écoulement et de structure, la limite d'oscillation
des ailes peut être évaluée en considérant le temps. Tout d'abord cette étude calcule la
réponse aéroélastique d'un model de section d'aile en flèche positive, en couplant un solveur
d'écoulement et un solveur d'équation de mouvement structurel a deux degrés de liberté,
afin de prédire la limite d'oscillations d'un profile d'aile portante a différents nombres
de Mach. Les résultats concordent bien avec les résultats numériques précédents, et le
phénoméne puit-transsonique peut être observé. Deuxièmement, une nouvelle approche
couplée est introduite afin de transférer avec précaution la charge et le déplacement entre
les solveurs d'écoulement et de structure pour un fluide en trois dimensions. En couplant
le solveur d'écoulement et le modèle structurel à fidélité réduite d'éléments finis, le point
d'oscillation d'une aile AGARD 445.6 a été calculé à nombre de Mach de 0.499. Le point
d'oscillation concorde bien avec les résultats expérimentaux et les résultats numériques
obtenus précédemment.
iv
TABLE OF CONTENTS
ACKNOWLEDGEMENTS
ABSTRACT
RÉSUMÉ ..
LIST OF TABLES .
LIST OF FIGURES
1
2
3
Introd uction
1.1 Aeroelasticity 1.2 Literature Review .
1.2.1 Previous CFD/CSD work 1.2.2 Mesh Deforming Aigorithm 1.2.3 Fluid-Structure Interface Model
1.3 Thesis Objective ..
Governing Equations ...... .
2.1 Governing Equations of Flow . . 2.2 Governing Equation of Structure
2.2.1 Typical Wing Section Model . 2.2.2 Isotropic 3-D Linear Structural model
2.3 Fluid/Structure Interaction . . . . . . . 2.3.1 Conservation of LoOO and Energy 2.3.2 Geometrie Conservation Law.
Methodology Description . . ...
3.1 Flow Solver . . . . . . . . . . . . . 3.1.1 Weak-Galerkin Formulation 3.1.2 Artificial Viscosity .. 3.1.3 Spatial Discretization 3.1.4 Time Discretization . . 3.1.5 Newton Linearization .
v
ii
iii
iv
viii
ix
1
1 5 5 8
10 12
14
14 15 15 17 20 20 21
22
22 23 23 24 26 26

3.1.6 Time-Marching approach . . 27 3.1.7 Boundary Conditions . . . . 27 3.1.8 Mesh Deforming Aigorithm 28
3.2 Structural Mechanics . . . . . . . . 28 3.2.1 Finite Element Analysis of Structure 30 3.2.2 Time Integration Approach 32 3.2.3 Finite Element Model. . 33 3.2.4 Damping Characteristics 34
3.3 Fluid-Structure Interface . . . 35 3.3.1 Displacement Transfer 36 3.3.2 Load Transfer . . . . 39 3.3.3 Coupling Procedure. 39
4 Isogai Test Case . . 45
4.1 Physical Model 45 4.2 Mesh Generation 46 4.3 Numerical Setup 46 4.4 Results ...... 47
4.4.1 Initial solution . 47 4.4.2 Pitching Airfoil 49 4.4.3 Aeroelastic Simulation 52 4.4.4 Effect of High-density Region 64 4.4.5 Effect of Coupling Time Step 67 4.4.6 Effect of Number of Sub-Iterations 67
5 Sweptback Wing Test Case . 71
5.1 Physical Model .. 71 5.2 Mesh Generation 73
5.2.1 Fluid Mesh 73 5.2.2 Structural Mesh . 74
5.3 N umerical Setup ... 77 5.4 Results .......... 81
5.4.1 Initial solution. . 81 5.4.2 Aeroelastic computation 83 5.4.3 Effects of Coupling ... 84 5.4.4 Effect of Artificial Viscosity 84
6 Conclusions ... 86
6.1 Future Work 87
vi

R.eferences. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 89
vii
LIST OF TABLES Table
5-1 Comparison of Natural Frequencies ..... .
viii
~
72

LIST OF FIGURES Figure
1-1 Topology of Forces in Aeroelasticity Problem . 2
1-2 Transonic Dip of Two-dimensional Sweptback Wing Model. 5
1-3 Modular Coupling Aeroelastic Analysis . . . . . . . . . . . 10
2-1 Two-DOF Wing Section Model Geometry and Parameters 15
3-1 Two-Zone Mesh Deforming Strategy 29
3-2 Displacement Extrapolation System 37
3-3 Load Transfer System . 40
3-4 Synchronization Scheme 42
3-5 Schematic of Modular Coupling System for Node-to-element Approach 43
4-1 C-type Hexa Mesh for NACA64A010 airfoil. 320 x 31 x 2 . . . 48
4-2 Residuals for the Steady lnviscid Transonic Flow (Moo = 0.825) 50
4-3 Initial Solution for Moo = 0.7 and Moo = 0.825 ... . . . . . . 51
4-4 Hysteresis Loop and Evolution of Cl and Cm in Time (Moo = 0.796, a = 1.01 and Wr = 0.202) .................... 53
4-5 Mach Contour at Various Time Steps for Moo = 0.796 54
4-6 Cp Distribution at Various Time Steps for Moo = 0.796 . 55
4-7 Flow Solver Convergence History for Unsteady Calculation (Moo = 0.825, V, = 0.682) ................... 57
4-8 Cp distribution at T = 1.2s (Moo = 0.825, V, = 0.682) 58
4-9 Mach Contour at T = 1.2s(Moo = 0.825, V, = 0.682) 58
4-10 Damped Stable Response (Moo = 0.7, V, = 1.20) .. 59
ix

4-11 Neutral Stable Response (Moo = 0.7, VI = 1.23) 59
4-12 Divergent Response (Moo = 0.7, VI = 1.30) . 60
4-13 Damped Response (Moo = 0.825, VI = 0.66) 60
4-14 Neutral Stable Response (Moo = 0.825, VI = 0.682) 61
4-15 Divergent Response (Moo = 0.825, VI = 0.70) 61
4-16 Damped Response (Moo = 0.875, VI = 0.50) . 62
4-17 Neutral Stable Response (Moo = 0.875, VI = 0.52) . 62
4-18 Divergent Response (Moo = 0.875, VI = 0.54) 63
4-19 Flutter Boundary (VI = w~t"'v'ii) 63
4-20 Effect of Mesh Quality . . . . . 65
4-21 Neutral Stable Response with Transonic Mesh (Moo = 0.825, VI = 0.684) . 66
4-22 Divergent Response with Transonic Mesh(Moo = 0.825, VI = 0.70) 66
4-23 Effect of Non Aeroelastic Response (Moo = 0.825, VI = 0.682) . . . 68
4-24 Close-up View of the Effect of Non Aeroelastic Response (Moo = 0.825, VI = 0.682) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 69
4-25 Effect of Number of Sub-Iterations per Time Step. (Moo = 0.825, VI = 0.682) 70
5-1 Planform View of AGARD Wing 445.6 . . . . . . . . . . . . . . . 72
5-2 Computational Domain of the Flow around AGARD Wing 445.6 73
5-3 The Partial View of the Surface Mesh and the Symmetry Plane of the Wing 445.6 ...................................... 75
5-4 The Partial View and Close-up Partial View of the Surface Before and After Surface Deflection of the Wing 445.6 ( green-before deflection, red-after deflection) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
5-5 The Structural Mesh of Finite Element Model of Wing 445.6 ........ 77
5-6 The Deflection of Wing 445.6 for the First Four Natural Modes of Vibration 78
5-7 The Contour of Deflection of Wing 445.6 for the First Four Natural Modes of Vibration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. 79
x

5-8 Residual History and Cp distribution at different spanwise location for Flow around AGARD Wing 445.6 at Moo = 0.499 .......... 82
5-9 Wing Responses at different freestream pressure for Moo = 0.499 83
5-10 Wing Responses with different coupling instance for Moo = 0.499, Poo = 107.5%P ................................... 84
5-11 Wing Responses with different artificial viscosity for Moo = 0.499, Poo = 107.5%P ................................... 85
xi
1.1 Aeroelasticity
CHAPTER 1 Introduction
Aeroelasticity, and particularly fiutter, has infiuenced the evolution of aircraft since
the earliest days of fiight. The earliest conscientious and beneficial use of aeroelastic effect
was the Wright brothers' application ofwarping the wing tip to control their biplane instead
of ailerons, and they also were aware of the adverse aeroelastic effect of loss of thrust due
to the twisting of the blades of the propellers. Classical aeroelasticity involves three sub
disciplines: Aerodynamics, Solid Mechanics and Dynamics [12]. Figure (1-1) illustrates the
topology of forces (or sub-disciplines) involved in an aeroelastic problem. As illustrated,
dynamic aeroelasticity involves the interaction of the aerodynamic, elastic, and inertial
forces. They are responsible for dynamic response problems such as gust response and
fatigue, fiutter-a usually destructive self-excited oscillation, limit cycle oscillation (LCO)-a
sustained periodic oscillations for a given fiight condition, and buffet-a structural response
to the aerodynamic excitation produced by separated fiows.
In the earlier days of fiight, the absence of a thorough understanding of aeroelastic
phenomena resulted in the loss of aircraft and human life. By the mid-1950s, aeroelasticity
became recognized as an important part of the aircraft design process. However, aeroelastic
methods were limited to theoretical and experimental methods such as wind tunnel test,
ground vibration test and fiight test. In the former case only simplified or idealized cases
could be studied. Aeroelastic analysis for complex configurations could only be obtained
1

StaticAeroelasticity
A: Aerodynamic Forces (Aerodynamics) E: Elastie Forces (Solid Mechanics) 1 : Inertial Forces (Dynamics)
Figure 1-1: Topology of Forces in Aeroelasticity Problem
through experimental methods, however, the large expense and long periods of preparation
limited its use to a handful of flight conditions.
Fortunately, the advent of the digital-computer and the recent increase of comput
ing power at low price brought considerable changes to the field of aeroelasticity. On the
one side, computational structural dynamics (CSD) using finite element (FE) method has
proved to be computationally efficient to solve aerospace structural problems [24]. On the
other side, computational fluid dynamics (CFD) has emerged as a practical technology to
numerically solve alllevel of fluid equations from the simple potential equation to the com
plex Navier-Stokes equation [20]. By coupling CFD and CSD methods, larger aeroelastic
systems with more degrees of freedom can be analyzed [31]. Based on these achievements
(not only including ab ove mentioned success), Computational Aeroelasticity (CAE), which
refers to the coupling of high fidelity CFD methods to structural dynamics (SD) tools to
perform aeroelastic analysis, entered into the design phase of aircraft.
2
Generally, there are three approaches to couple CFD and CSD tools: full coupling,
tight coupling and loose coupling. In the full coupling approach, the governing equations
are reformulated to combine both the fluid and structural equations into a single set of
equations [5]. The CFD and CSD equations can then be solved and integrated in time si
multaneously, allowing a zero time lag between the structural modelloads and aerodynamic
forces. The coupling between fiuid and structure naturally occurs as the result of shar
ing the degrees of freedom at the fluid-structure interface. However, since the structural
system is physically much stiffer than the fluid system, the numerical matrices associated
with structural equation are orders of magnitude stiffer than those associated with the
fluid solver. Therefore, it is numerically inefficient or even impossible to solve the entire
system using a single numerical scheme. Methods have been developed for the fully cou
pIed methods, but they are restricted to two dimensional and small-scale three dimensional
problems.
In a tight coupling approach, fluid and structural equations are solved separately and
loads and displacements between the CFD and CSD codes are exchanged at every time step.
Although the actual structural model loads lag the aerodynamic loads by one time step,
if the time step used is small, no significant lag is introduced to the fluid solver, and the
accuracy and stability of both the fluid and structural equations are ensured. At the end of
each time step, the structural dynamic solver predicts a new structural configuration which
is used to determine a new surface mesh for the CFD grid. On the other hand, the new
load distribution obtained from the CFD solver is transfered to the structural mesh. This
can be called a CSD/CFD cycle. Before continuing to the next time step, the cycle repeats
until a converged solution within a specified tolerance is obtained. The tight coupllng
approach could either be implemented as an integrated or modular type. In the case of an
integrated tight coupling method, either the CFD or CSD source code should be altered to
3

include the coupling scheme. The codes are then compiled together and each have access
to the physical memory of the other. A modular tight coupling approach consists of three
separate modules: CFD, CSD and Fluid-Structure Interaction (FSI), allowing a variety of
combinat ion of CFD/CSD codes. In an aircraft design phase, a modular tight coupling
approach will allow the engineer to increase the fidelity of either the CFD or CSD without
altering the coupling approach. At the initial stages of the design phase, the CFD module
can be represented by the solution to the potential equations and the CSD module can be
represented by simple beam theory. As the design progresses, the flow field cau be solved
instead by the Euler equations or ultimately the Navier-Stokes equations and the structure
can be represented by a full Finite Element model.
In the loose coupling approach, the CFD and CSD equations are solved alternatively
with occasional interactions only. Here, CFD analysis are updated by structural deflection
only after several flow field time steps [41]. Unfortunately, this coupling approach is sus
ceptible to convergence issues due to the inability to capture feedback effects between the
aerodynamic pressure and the structural deflection.
In the aeroelasticity analysis, the simulation of transonic flow is significantly more
complicated than that of either the subsonic or supersonic flight regime due to the nonlin
earity introduced by the presence of shock waves. When a wing is immersed in transonic
flow, shock waves can form or disappear as the wing undergoes unsteady structural deflec
tions. Regions of separated flow may appear or disappear as the shock wave strengthens
or weakens. These nonlinear characteristics could lead to flutter, limit cycle oscillations
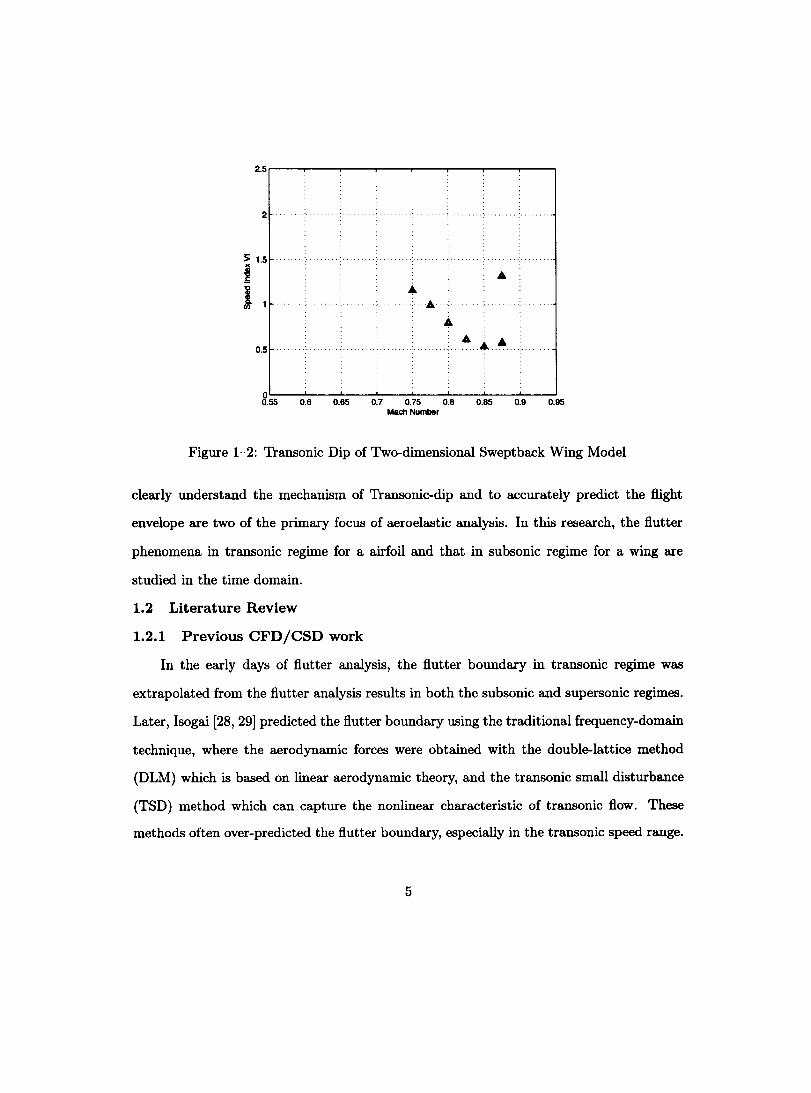
(LCO), buzz of control surface or other nonlinear phenomena. Figure (1-2) shows the flut
ter boundary of a two dimensional sweptback wing section model in transonic flow, which
is extensively used in many CAE simulation cases. In the transonic speed range, with the
increase of Mach number, the flutter boundary dips and then rises again. Therefore, to
4
2.5r--....,......----.---.---....,......----.---.---....,......-~
2
:> 1.5
j
Il •
0.5 ................ . .la. .la.
..................•
o~-~-~--~-~-~--~-~-~ ~ M ~ V ~ M ~ M ~
Mach Number
Figure 1-2: Transonic Dip of Two-dimensional Sweptback Wing Model
dearly understand the mechanism of Transonic-dip and to accurately predict the fiight
envelope are two of the primary focus of aeroelastic analysis. In this research, the flutter
phenomena in transonic regime for a airfoil and that in subsonic regime for a wing are
studied in the time domain.
1.2 Literature Review
1.2.1 Previous CFD/CSD work
In the early days of flutter analysis, the flutter boundary in transonic regime was
extrapolated from the flutter analysis results in both the subsonic and supersonic regimes.
Later, Isogai [28,29] predicted the flutter boundary using the traditional frequency-domain
technique, where the aerodynamic forces were obtained with the double-Iattice method
(DLM) which is based on linear aerodynamic theory, and the transonic small disturbance
(TSD) method which can capture the nonlinear characteristic of transonic flow. These
methods often over-predicted the Butter boundary, especially in the transonic speed range.
5

Thus a new model that includes the important nonlinear aerodynamic effects such as a
shock wave need to be developed.
Bennett et al. [7] developed the Computational Aeroelasticity Program-Transonic
Small Perturbation (CAP-TSD) method to perform transonic aeroelastic analysis by cou
pling the transonic small disturbance potential flow equation with the natural vibrational
mode-based structural equations. The TSD potential equation was solved with a modified
AF algorithm [4] using the finite-difference method. The structural equation of motion
were solved on a sheared Cartesian grid where the lifting surface were modeled as a thin
plate. This kind of approach simplified grid generation and no deforming mesh algorithm
was required as the surface velo city boundary condition was applied at the mean plane.
Despite of its high efficiency in computation, this technology might fail in the presence of
a strong shock due to the inability for the potential equations to compute the entropy and
vorticity [20].
To overcome this problem, Batina et al. [4] solved the flow field using the Euler equa
tions on an unstructured grid. The aeroelastic solution was obtained by tightly coupling the
mode-shape-based structural equations with the Euler equations. The CSD code was inte
grated into the CFD code, CFL3D. In this method, the Euler equations were solved using
the three-dimensional upwind-type solution algorithm, which permits very large time steps.
The structural system of equations were used to obtain the generalized coordinates at the
CFD grid nodesj and the resulting aeroelastic displacement at any time can be described
as a linear combination of a finite set of modes weighted with the generalized coordinates
under the linearity assumption of modal analysis (mode superposition method) [10]. How
ever, the increasing use of composite materials for aeroelastic tailoring and the nonlinear
nature of transonic flows make this linearization assumption less attractive. Conversely,
when using the finite element equation, there is no harmonie motion assumption, and the
6
stress acting on the surface of the structure can be obtained directly, resulting in a more
reliable computation, however, the CPU time and storage increases.
Guruswamy et al. [20, 21J developed a procedure (ENSAERO, version 1.0) to solve
simultaneously the Euler flow equations and modal structural equations of motion for
computing the aeroelastic response of a wing. The flow field equations were solved using
a Beam-Warming central-difference scheme on a C-H grid. The aeroelastic equation of
motion was solved by a numerical integration technique based on the linear-acceleration
method [25]. The total displacements of the wing were obtained by superposing the dis
placements from each mode. Schuster et al. [38J coupled a 3-D flow solver with a linear
structure model to study the aeroelastic analysis of a flight aircraft (ENS3DAE version
1.0). Thin layer approximation of the full 3-D compressible RANS equations were used.
The Beam-Warming implicit scheme was implemented for time integration, and the set
of the discrete flow field equations were solved on a multi-block curvilinear grid. A mesh
deformation algorithm that uses an algebraic shearing technique was used to account for
the grid movement. The structure was modeled with linear generalized mode shapes.
Liu et al. [34J presented an integrated CFD and CSD method for simulation and
prediction of flutter based on an unsteady, parallel, multi-block, multi-grid finite volume
algorithm solving Euler IN avier-Stokes equations. The solution of the flow field was tightly
coupled in time with the solution of the structural modal dynamic equations extracted
from finite element analysis. A dual-time step algorithm was employed to compute the
flow field at each time step. A moving mesh method based on transfinite interpolation
(TF1) [16J and spring analogy was integrated into the code.
Other similar works [6, 30, 22, 21, 14J have also approached the problem of aeroe
lasticity by using tightly coupled high fidelity CFD and CSD methods. Often these tight
7

coupling approaches, were implemented in an integrated fashion, not allowing a wide vari
et y of CFD and CSD codes to be used. To allow for greater flexibility, a modular coupling
approach can be used. Generally, the modules include the flow solver module, structural
solver module and Fluid-Structure Interface (FSI) module, which control the communi
cation between the flow and structural solver modules. For instance, MDICE [39] allows
different flow solvers such as CFD-FASTRAN (CFD Research Corporation) and WIND
(Boeing), and structural solvers such as FEMSTRESS (CFD Research Corporation) and
NASTRAN to be used to perform aeroelastic analysis.
1.2.2 Mesh Deforming Aigorithm
In each CFDjCSD cycle, the interior fluid grid points must be computed based on
the deformation on the surface, which are based on the solution to the structural equation
of motion. A variety of mesh deforming algorithms have been carefully designed. The
simplest and most robust method is to globally re-mesh the interior nodes based on the
surface nodes [17], however, this pro cess is computationally costly.
The most common methods perturb the interior nodes of the existing grid. A proven
technique for perturbing structured single block grids is the algebraic shearing process [45].
In this method, grid points along a grid line that connect the body surface to the far-field,
are shifted along the same grid line. The surface displacement is gradually decayed to zero
at the far-field, and rotational movement can be added to maintain orthogonality at the
surface. This scheme is easy to implement, but, large displacements can have an adverse
effect on grid quality.
The spring analogy scheme, initially developed by Batina [4], is usually applied to grid
perturbation on unstructured triangular or tetrahedral grids. Here, the mesh is modeled
as a network of springs, and the edges of each computational cell represents a linear spring
whose stiffness is inversely proportional to a specified power of the edge length. Robinson et
8

al. [37] extended this scheme to structured grids where diagonallinear springs were added
along the surface of the celi in order to control celi shearing and to prevent the collapse of a
cell. Similarly, the stiffness of the diagonal springs are inversely proportional to the length
of the diagonal raised to a power. Farhat et al. [18] proposed a modified spring analogy
by adding additional nonlinear torsion spring to avoid the negative celi volume problem
associated with the linear spring network. However, spring analogy methods require con
siderable computer resource in terms of memory and CPU time and have wider use on
unstructured meshes where structured 3D interpolation methods are not as applicable.
'fransfinite Interpolation (TF1) is another widely-used efficient technique for generat
ing structured computational grids [15]. Here, the coordinates of points at the vertexes and
edges (and in three dimensions, from the block faces) are interpolated to locate grid points
in the interior of the integration domain. TF1 combines the speed and efficiency of an alge
braic method with the ability to handle fully 3D perturbation. Wong et al. [50] combined
the TF1 and spring analogy to re-mesh adaptively in each grid block. An arc-Iength-based
transfinite interpolation is used to move the grids within each block. A spring network
approach is then applied to determine the motion of the corner points of the blocks and a
smoothing operator is introduced to maintain the grid smoothness and grid angles.
Another class of method for re-meshing is by solving a partial differential equation.
Holmes et al. [27] move the grid points in the interior of the flow domain by solving the
Laplace equation V'2u = 0 for each of the three components of the displacement with the
Dirichlet boundary condition imposed on aIl boundaries. This method can maintain grid
point concentration for small displacements, but for large displacements, it can lead to
mesh degeneracies near sallent corners of the geometry. Mittal et al. [35] proposed that
within a smali region around the body, elements move rigidly with the body. However, this
9
Transferto FEMGrid
F1uidlStructure Interface
Move Transferto u Grid CFDGrid
Figure 1-3: Modular Coupling Aeroelastic Analysis
proved to be applicable only to simple rotations and translations. A new two-zone grid
moving approach with enhanced robustness was presented by Lepage et al. [33]. Here, the
displacements of interior grid points in both zones were smoothed by solving the Laplace
equation with Neumann boundary conditions ~ = 0 on the external boundary of the inner
zone. The mesh deformation procedure employed in this work will use a two-zone method.
1.2.3 Fluid-Structure Interface Model
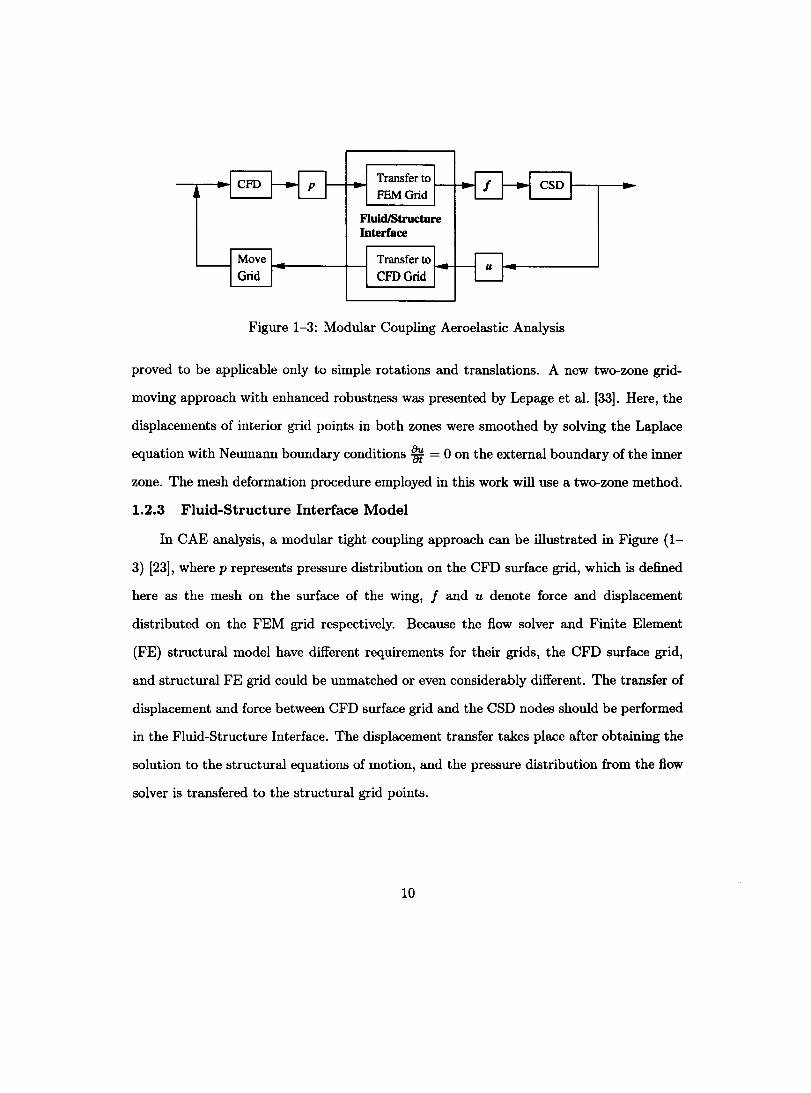
In CAE analysis, a modular tight coupling approach can be illustrated in Figure (1-
3) [23], where p represents pressure distribution on the CFD surface grid, which is defined
here as the mesh on the surface of the wing, f and u denote force and displacement
distributed on the FEM grid respectively. Because the flow solver and Finite Element
(FE) structural model have different requirements for their grids, the CFD surface grid,
and structural FE grid could be unmatched or even considerably different. The transfer of
displacement and force between CFD surface grid and the CSD nodes should be performed
in the Fluid-Structure Interface. The displacement transfer takes place after obtaining the
solution to the structural equations of motion, and the pressure distribution from the flow
solver is transfered to the structural grid points.
10

Numerous CFDjCSD interpolation algorithms have been developed in the CFD com
munity. Among them, the method of Infinite-plate splines (IPS) [26], which is used exten
sively in programs such as ASTRO, MSCjNASTRAN [43,42], is based on a superposition
of the solutions for the partial difIerential equation of equilibrium for an infinite plate.
Using the solution of the IPS, a set of concentrated loads are calculated that gives rise to
the required deflection. These concentrated forces are substituted back into the solution to
provide a smooth surface passing through the data. The deflection of the CFD grid points
can be easily calculated from the deflection of the structural grid points. However, this
method does not conserve the work done by the aerodynamic forces and requires fine grids
from both the fluid and structural system to provide accurate results [23].
Guruswamy et al. [24] presented a virtual surface (VS) method based on the mapping
matrix developed by Appa [2]. Here, a virtual surface was introduced between the fluid
surface grid and the FE mesh for the wing. Both the displacement of surface grid points
and structural FE nodes can be expressed as the product of a mapping matrix and the
global displacement vector. By forcing the deforming VS to pass through the given data
points of the deformed structure, the relationship between the displacement of aerodynamic
surface grid points and structural grid points can be built with a derived mapping matrix
[TjT. From the principles of virtual work, the nodal force vector of aerodynamic grid
points can be mapped onto the structural grid points with the matrix [T]. This approach
not only accommodates changes in fluid and structural models easily, but also conserves
the work done by the aerodynamics when obtaining the global force vector. However, the
requirement of intermediate modeling between fluid and structural models may lead to
more complicated coding and more expensive computations.
Tzong et al. [48] developed a node-to-element approach. Here, the FE grids are gen
erated using an iso-parametric element, and surface grid nodes are projected directly onto
11

the adjacent elements of the FE model. Then the relationship between the displacement
of surface grid nodes and the displacement of the projected point on the FE element can
be written in a matrix format Ua = [F]us , where Ua contains three translational displace
ment components of the surface grid point, Us consists of three translational and three
rotational displacement components of the finite element, and [Pl is the mapping matrix
which depends on the location of the surface grid point, the location of the projected finite
element and the offset distance from the surface grid point to the element surface. Using
the inverse matrix of [F] the force calculated from the flow solver can be proportionately
distributed to the structural nodes, and the work done by the aerodynamic force is consis
tently transfered to the FE model. Brown [8] developed a similar scheme, and combined
them with the lumped method for wing-box structure to interface data between fluids and
structure. Chen et al. [9] proposed an alternative approach based on a boundary element
concept and applied it to a blended wing body configuration.
1.3 Thesis Objective
The research conducted in this thesis concentrated on two main objectives:
1. Coupling typical wing section model and flow solver to find the flutter boundary in
transonic regime with transient response method.
2. Developing a new fluid-structure interface algorithm.
3. Using the above interface algorithm in computational aeroelastic analysis to find a
flutter point of a real wing in subsonic flow.
The equations of motion of a typical section model is solved with the ,B-Newmark
scheme, the Euler equations of fluid flow around the model is solved with the flow solver-FENSAP,
and the virtual surface method is used to transfer load and displacement between fluid sur-
face grid and the FE nodes. This framework is applied to the NACA64010 airfoil to
12

calculate the fiutter points of a sweptback wing section at different transonic Mach num
bers.
Using the new fiuid-structure interface algorithm, the fiow solver-FENSAP is coupled
with the structural solver-N ASTRAN to predict the subsonic flutter point of the AGARD
wing 445.6 at a Mach number of 0.499.
The results in both test cases are compared with previous numerical and experimental
results.
13

CHAPTER 2 Governing Equations
Aeroelastic analysis constitutes two main components: unsteady aerodynamics and
structural analysis. First, the goveming equations of unsteady aerodynamic flow based on
conservation laws are presented in the Eulerian reference frame. Second, the structural
equations of models are formulated in a Lagrangian reference system.
2.1 Governing Equations of Flow
Under the assumptions of continuum and Newtonian fluid, the Euler equations for
a rigidly translating control volume V, defined by boundary av with an outward facing
normal N, can be written in integral form as
(2.1)
The the state vector w, and a component of the inviscid flux vector, Fi, can be written as
p P (Vi - ~) pv! pv! (Vi - ~ ) + 8liP
w= PV2 ' Fi = PV2 (Vi - ~ ) + 82ip
PV3 PV3 (Vi - ~ ) + 83ip
pe pe ( Vi - ~ ) + PVi
In these equations, x, y, z are the Cartesian coordinates, p is the density, Vi, Xi are the
Cartesian velocity components of the fluid and Cartesian coordinate components, e is the
total energy, and P the pressure. The system is closed by the state equation of ideal
gas, which is applicable to the subsonic and transonic flow calculation. Consequently, the
14

"
Figure 2-1: Two-DOF Wing Section Model Geometry and Parameters
pressure, p, can be expressed as
(2.2)
where'Y represents the ratio of specific heats. The total enthalpy is also related to the total
energy and pressure by
h = e+~. p
2.2 Governing Equation of Structure
(2.3)
In this section, the structural equations of motion are introduced. Two structural
models are presented: first, a two degree of freedom wing section model; second an isotropie
3D linear structural model.
2.2.1 Typical Wing Section Model
To simulate the movement of wing sections, the wing section is elastically mounted
on the base, and it is permitted to move in pitch about a given elastic axis and plunge
vertically. The elastic axis is defined by a in term of semi-chord length b with the origin
point located at the mid-chord position. If a is positive, it means that the axis is located
downstream of the mid-chord, and negative if the axis lies upstream of the mid-chord.
15

A sketch of a typical wing section model can be depicted by Figure 2-1. Neglecting
the structural damping force, the structural equation of motion can be represented by the
following set of equations.
or, in matrix form
[M]{q} + [K]{q} = {i},
where
and [K] = [Kh 0 1 o Ko;
(2.4)
(2.5)
(2.6)
are the mass and stifIness matrices. The load and displacement vectors can be defined as
where, h is the plunging displacement from the elastic axis (positive down) , a is the pitching
angle (positive nose up), m is the mass of airfoil per unit span, 80; is the static moment
around the elastic axis, Jo; is the moment of inertia about elastic axis, Kh and Ko; are the
plunging and pitching spring constants, L is the lift force (positive up) and Mea is the
moment around elastic axis (positive nose up). The structural equations (2.4) and (2.5)
can be normalized by using the following non-dimensionalization variables:
h'-!!: t'=~ - b' Wo;
16

where Wo: is the uncoupled natural frequency of the airfoil in pitch. The non-dimensionalized
structural equations can then be written as
(2.7)
(2.8)
where the prime signs of dimensionless variables are neglected, Wh is the uncoupled natural
frequency in plunge, Xa , ra and kc are the static umbalance, radius of gyration and the
reduced frequency respectively, and are given by
r~2 -~ - mb2'
k _ wab
c - Uoo
'
(2.9)
(2.10)
(2.11)
Cl and Cm are the lift and moment coefficients about the elastic axis, and /-L is the airfoil
mass ratio defined as m
/-L = 1rpb2 ' (2.12)
2.2.2 Isotropie 3-D Linear Structural model
This section summarizes the basic equations of the linear theory of elasticity, and the
principal of virtual work which the finite element method is based. This theory forms the
foundation of the Isotropie 3-D linear structural model used in this work.
Differentiai Equation of Elasticity
For a material point whose coordinates are X(Xl, X2, X3), under the assumption of small
deformation, the strain-displacement relationship can be written as
8Ui 8uj 8Ui €ii = -8 ' €ij = €ji = -8 + -8 '
Xi Ui Uj (2.13)
17

where fii and fij are the three normal strain components and six shear strain components
respectively, Ui is the three components of the displacement vector u of that point.
If the structure is homogeneous and isotropie and the displacement is small, the strain
stress relationship are given by
(2.14)
where O"ii and O"ij are the three components of normal stresses and six shear stresses re-
spectively, and
À = 1/E (1 + 1/)(1 - 21/)'
E Il- = 2(1 + 1/)'
where E is Young's modules, and 1/ is Poisson's mtio.
For a small moving particle with unit volume, the equation of motion can be derived
from the equilibrium of internaI and external forces applied to it. Under the dynamic
loading condition, the inertial force -pü, should be considered, and the dissipation of
energy during vibration is taken into account by adding a velo city dependent damping force
-~u, where ~ is the coefficient of viscous damping per unit volume. Thus the equation of
motion in the i-direction can be written as
ÔO"ij .. • F -ô + PUi + ~Ui = Bi,
Xj (2.15)
where FBi represents the body force in the i-direction. These three equations should hold at
the x, y, and z directions at every point of the structure. The stresses O"ij vary throughout
the structure, and at its boundary surface they must be in equilibrium with the external
forces acting on the surface.
18

Principle of virtual displacement
The exact solution to equation (2.15) is feasible to sorne special cases, however, for
a general structure, it can be approximately solved by using the energy method. Energy
methods are restricted to small deformations such that the equation that relates strain to
displacement remain linear. The principle of virtual work which is one of the more preferred
energy methods states that a structure under the action of a set of forces is in equilibrium,
if the virtual work is equivalent to the virual strain for any virtual displacement, 8u. In a
fact, the method assumes that while the structure is displaced from u to u + 8u, the forces
acting on the structure remain constant. As a result, for a system described by equation
(2.15), the virtual work done by the stress, inertial, damping and body forces should equal
to zero. This relationship can be derived by integrating the product of Equation (2.15)
and the virtual displacement 8u over the structural system,
r (ÔÔO'ii + piii + KUi) 8udV = r p8udS, lv xi lav
(2.16)
where the the right hand side denotes the work done by the aerodynamic pressure on the
boundary surface of the structure. Introducing the stress vector u and the strain vector E
AU fU
0'22 f22
0'33 f33 u= , E=
0'12 f12
0'23 f23
0'31 f31
equation (2.16) can be cast into
r 8ET udV = r p8udS - r 8u[pü + Kü]dV. lv lav lv
(2.17)
19

2.3 FluidjStructure Interaction
Since the fluid and structure do not mix, there exists an interface such as a 2D man-
ifold in 3D space, in which the fluid and structure interact on each other. Therefore, in
the process of constructing the governing equations for a continuous system in fluid and
structural domains, the displacement and pressure field should remain identical in both
domains. Similarly, for the computation of an aeroelastic system with the discretized for-
mulation, these two identities should be maintained by some mathematical principle. As
examples of such princip les , the conservation of loads and energy in terms of load transfer
from the fluid to the structure, and the geometric conservation law in terms of displacement
transfer from structure to the fluid are introduced in this section.
2.3.1 Conservation of Load and Energy
The surface of the structure can be discretized into a set of finite number of elements.
When the distributed pressure load is applied to a finite element, it must be transformed
into an equivalent set of point forces at the nodes. The transformation must satisfy two
criterias. First the total forces acting on the structure must be equivalent to the totalloads
computed on the fluid grid by integrating pressure over the surface. Thus conservation of
load must be satisfied, which can be represented by
L f(m) = la pdS, m av
(2.18)
where f{m} is the nodal force vector at the node m of the structural system.
Second, the virtual work done by the nodal forces f{m} by perturbing the structural
nodes by a virtual nodal displacement 8q should be equal to that done by the original
20
distributed pressure load p moving through an equivalent virtual displacement 6u, namely,
This is called conservation of energy.
2.3.2 Geometrie Conservation Law
(2.19)
In computational aeroelastic analysis, when the structure experiences a displacement
movement, the wall boundary surface of the flow system should have a consistent displace
ment. The geometric parameters of the wall boundary surface nodes of the flow mesh must
satisfy the geometric conservation law [47J, which states that the computation of the geo
metric parameters must be performed such that the resulting numerical scheme preserve
the state of a uniform flow, independent of the mesh motion. Its integral form given by
Farhat et al [18J is cast as
dd r dV(t) = r (b.n)dS(t) t Jv Jav
(2.20)
where n represents the outward unit vector, b denotes the local boundary velocity varying
over the surface S(t) of the control volume.
21

CHAPTER3 Methodology Description
Computational Aeroelastic analysis involves the simultaneous computation of the
structural equations of motion and the fluid equations to estimate the dynamic response of
an elastic structure. An accurate response can only be acquired by a consistent coupling
of the two disciplines. The flow solver provides the pressure distribution over the aircraft
surface, which is conservatively transfered to the structural surface. The solution to the
structural equations of motion provides the displacement at each node at a given time.
Subsequently, the displacement is transfered to the fluid grid, and a new solution to the
fluid equations are acquired based on the new aircraft surface deflections.
This chapter presents the computational methods for the flow solver in section 3.1
and the structural solver in section 3.2 respectively. Section 3.3 depicts the fluid/structure
coupling procedure.
3.1 Flow Solver
In the present study, the flow solver employed is the Finite Element Navier-Stokes
Package (FENSAP), developed by the CFD Laboratory at McGill University. It is ca
pable of simulating three-dimensional laminar /turbulent, steady /unsteady, compressible
Euler/Navier-Stokes flow for a wide range of industrial applications. Based on a fully im
plicit finite element formulation with the Arbitrary Lagrangian-Eulerian (ALE) algorithm,
the continuity and momentum conservation equations are solved in a strongly coupled fash
ion for pressure p and velo city components Ui (i = 1,2,3) by lagging the density p. The
22

temperature T is obtained by solving the equation for conservation of energy. Finally the
density, p, is computed from the equation of state for ideal gas.
3.1.1 Weak-Galerkin Formulation
The weak-Galerkin formulation of Euler equation can be obtained by rewriting the
non-dimensional governing equation (2.1) in differential form, and then integrating it over
the fluid domain with respect to the weighted function W(x). The formulation is then cast
in terms of a first-order derivative, and not the original second-order derivative form. The
transformed integral form of the continuity and momentum equations can be written as,
1 { dp dXi âp } 1 1 - W ---- dV+ W·pv·dV- Wpv·n·dS=O V dt dt ÔXj v,) J S J J ,
(3.1)
_ f w{dPVi _ dXj (pâVi +Vi~)}dV Jv dt dt âXj âXj
+ Iv W,j {pvjVi + 8ijp} dV
-!s W {pvjVi + 8ijp} njdS = 0, (3.2)
where i = 1,2,3. Replacing e with T by using equation (2.3), the integral form of the
energy equation can be written as
-Iv W {pCp [~ + (Vj - d::) T,j - h - I)M! (: + (Vj - d::) p,j) ] } dV = O.
(3.3)
3.1.2 Artificial Viscosity
In order to stabilize the numerical scheme, artificial viscosity is added to the right-hand
side of the equations. The general form of the dissipation terms are
23
RGScont = Iv V' . {ha [(Ei + E~) V'p - E~V'p]} dV,
RGSi - mam = Iv V' . {ha [(EÏ + E2) V'Vi - E2V'Vi]} dV,
RGSenergy = Iv V'. {ha [(Er + En V'T - EfV'r]} dV,
(3.4)
(3.5)
(3.6)
where the coefficients Ei,EÏ,Er,E~,E2,Ef control the fust-and second-order artificial
dissipation added to the continuity, momentum and energy equations respectively, and ha
denotes a locallength scale h of the element, raised to the power a (a = 0 or 1). This
formulation allows for the variation of the magnitude of the artificial viscosity term based
on the local element size. A shock detector based on the pressure gradient turns off the
second-order term in the vicinity of shock waves to produce a pure upwind scheme [3].
3.1.3 Spatial Discretization
In the finite element method, the flow domain of interest is discretized into a collection
of small elements enclosed by the boundary surface (including real and virtual boundaries).
These finite elements are connected by nodes shared by surrounding elements. Then the
coordinate components ~i (i = 1,2,3) of any material point x in the local coordinate system,
at an element level, can be written as a function of its global coordinate components Xi
(i = 1,2,3) of the nodes of that element.
n.
~i = L XiNj(X), j=l
(3.7)
where ne is the number of nodes of the element, the interpolation function Nj(x) is the
shape function of the element expressed in local coordinates. This shape function depends
on the element geometry, number of nodes, and is also used to express the property pa-
rameters </>(x) of the same point in terms of the property parameters of the nodes of the
24

element, ne
4J(X) = L 4Jj Nj (x). (3.8) j=l
By taking weighted function W(x) equal to the shape function N(x) for each element,
the discretized finite element formulation of equation (3.1)-(3.2) can be written, respec
tively, as
Continuity :
Momentum (for i = 1,2 ,3):
= L [ W,j {ha [(il + €2) V,j - €2V,j]} dV - [ W {ha [(il + €2) V,j - €2V,j] nj} dS, e JVe JSe
(3.10)
Eneryy:
~ -le W {pep [~~ + (Vj - d;:) T:j - h - 1)M! (dt + (Vj - d::) P,j)]} dV
=L [W,j{ha[(€f+€nT,j-€It:j]}dV- [W{ha[(€f+€nT,j-€ITJ]nj}dS. e JVe JSe
(3.11)
25

3.1.4 Time Discretization
A backward difference formula, based on Gear's method, is employed to discretize the
time derivative terms in the time-accurate formulation. Take the ALE time derivative i of a dependent variable f for example, i at time level t can be written as
(:)' = ~t ( ao/I + ~ a;/(I-.8t») , (3.12)
where m is the order of accuracy in time, depending on the number of time levels used.
The second-order formulation is generally used due to the over-diffusion of the first-order
formulation and the highly dispersive third-order formulation.
3.1.5 Newton Linearization
In the solution strategy, for the stability and robustness of the numerical scheme, the
continuity equation (3.1) and momentum equations (3.2) are solved in a coupled manner
with respect to the variables p, vI, V2, V3 by using a lagged temperature T, and then the
energy equation (3.3) is solved for T. Newton's method is used to linearize the nonlinear
terms in these equations with respect to the incremental changes ~p, ~VI, ~V2, ~V3, and
~T. Thus, the system of equation to be solved becomes:
KP P
KVi P
K V2 P
K V3 P ~p Tp
K~i KVi K V2 K V3 ~VI TVi Vi Vi Vi (3.13) K~2 KVi
V2 K V2
V2 K V3
V2 ~V2 TV2
K~3 KVi V3
K V2 V3
K V3 V3 ~V3 TV3
{KF}{~T} = -{TT}, (3.14)
where Tp , Tvl' TV2 and TV3 are the residual of continuity and moment equations, the 4 x 4
matrix in (3.13) is the local influence matrix corresponding to continuity and moment
26

equations, TT is the residual of energy equation, and {Kt} is the local influence matrix
corresponding to the energy equation.
At each Newton iteration, the element influence matrices are assembled into two global
matrices. By solving in turn, these two matrices use a preconditioned Generalized Minimal
Residual (GMRES) iterative solver, with the choice of preconditioner depending on the
problem of interest, the incremental changes of p, Vi and T can be obtained.
3.1.6 Time-Marching approach
In the unsteady calculation, to obtain the solution at time level (n + 1) based on the
solution at time level n, the linearized equations are solved with Newton's method. After a
certain number of Newton iterations, if the residuals reach a convergence criteria, then the
solution can advance to the next time step. Due to the reason mentioned in section (3.2.1),
the steady state solution can be obtained with a time-marching approach. The solution
advances in time until the time derivative term becomes zero. Herein, only a single Newton
iteration is performed per time step.
The convergence rate of the Newton iteration can be improved by choosing a local
time step 6.t determined by the CF L number and the value ~t8tab, which varies according
to the size of the element.
~t = CFL· ~t8tab. (3.15)
3.1.7 Boundary Conditions
For inviscid flow, the slip condition is imposed on the wall. For unsteady computations,
the velocity of the surface nodes are computed with the backward difference formula (3.12)
with m set to 1. For the inlet boundary condition, the velocity v and temperature T are
specified as the free-stream velocity and temperature respectively. As for the exit boundary
condition, for a subsonic outflow, the pressure is specified along the entire surface and if
27

supersonic, no back pressure is specified. Lastly, at the symmetric plane, the velocity
component normal to the plane of symmetry is set to zero.
3.1.8 Mesh Deforming Algorithm
For an aeroelastic analysis, the computational fluid dynamic mesh must be deformed
at each time step such that the surface mesh matches the instantaneous shape of the
structural mesh. When the surface nodes of the fluid mesh move at the speed ~, the
nodes between the wall and far-field should be deformed appropriately, to ensure a high
quality mesh at each time step. Mesh distortions or inverted elements can severely affect
the convergence of the flow solver.
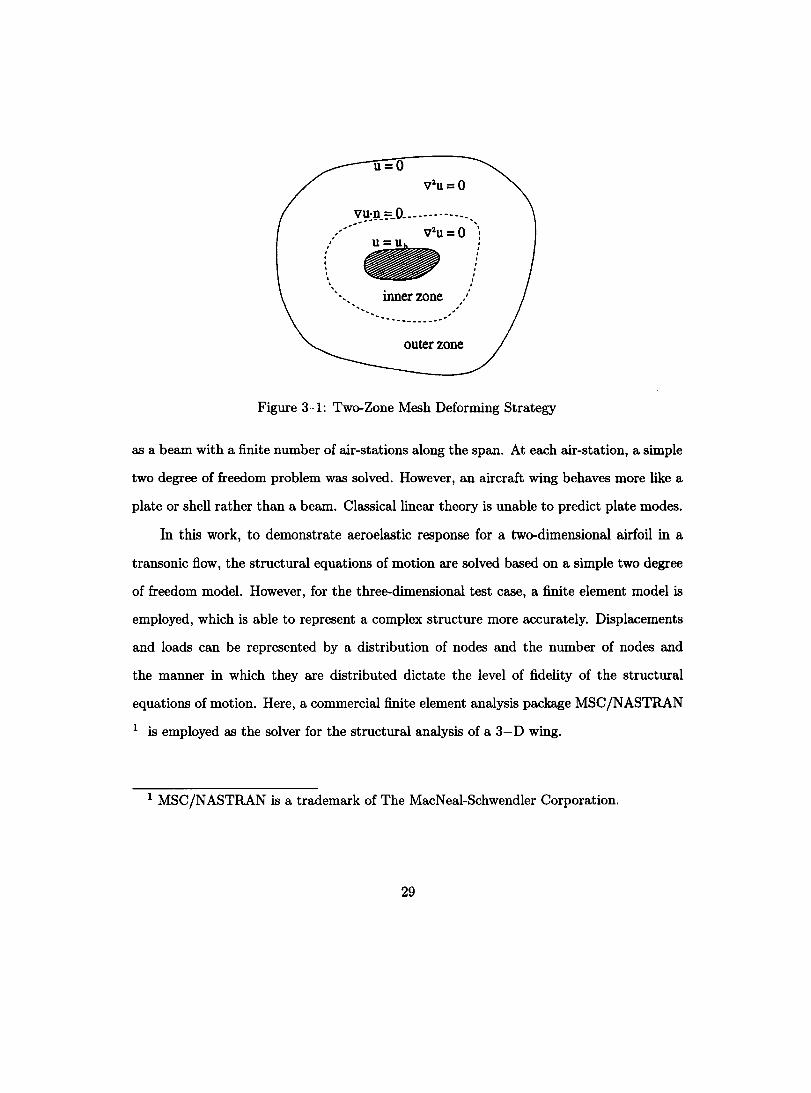
In this work, a two-zone grid-deforming approach with enhanced robustness is used in
the flow solver as illustrated in figure (3-1). In both zones, the displacement is smoothed
by solving the Laplace equation,
(3.16)
In the inner zone, a Dirichet boundary condition is imposed based on the surface grid dis
placement provided by the structural solver, and a Newman boundary condition Vu· n = 0
is enforced on the external surface of the inner zone. In the outer zone, a Dirichet boundary
condition is imposed on aH boundaries, with the value calculated from the displacement of
the inner zone and u = 0 is set at the far-field boundary.
3.2 Structural Mechanics
Aeroelastic analysis based on classical linear theory, can be obtained by solving a
simple eigenvalue problem using a limited number of degrees of freedom. The displacements
for each degree of freedom can be solved separately and by the method of superposition, the
overall deflections can be computed. Two degrees of freedom problems, one for the plunging
motion and the other for pitching, provide the basis for the majority of early aeroelastic
analysis. These methods were utilized for three-dimensional problems, by treating the wing
28
, , , , , 1 1 1 1 1 ,
, ,
u=o
vu·n = 0 ____________ _ ....... ----- "',
- V2U = 0 :
--- innerzone ---'. -------_.-
outer zone
1 1 1 1 1 1 . , , , ,
Figure 3-1: Two-Zone Mesh Deforming Strategy
as a beam with a finite number of air-stations along the span. At each air-station, a simple
two degree of freedom problem was solved. However, an aircraft wing behaves more like a
plate or shell rather than a beam. Classicallinear theory is unable to predict plate modes.
In this work, to demonstrate aeroelastic response for a two-dimensional airfoil in a
transonic flow, the structural equations of motion are solved based on a simple two degree
of freedom model. However, for the three-dimensional test case, a finite element model is
employed, which is able to represent a complex structure more accurately. Displacements
and loads can be represented by a distribution of nodes and the number of nodes and
the manner in which they are distributed dictate the level of fidelity of the structural
equations of motion. Here, a commercial finite element analysis package MSCjNASTRAN
1 is employed as the sol ver for the structural analysis of a 3-D wing.
1 MSCjNASTRAN is a trademark of The MacNeal-Schwendler Corporation.
29
3.2.1 Finite Element Analysis of Structure
In the finite element method, the structure is discretized into an assembly of finite
structural components (or elements) interconnected at the nodes on the element bound
aries. Vnder the assumption of small displacements the displacement vector u of any point
x can be written as
(3.17)
where 'I1(m) is the finite-element shape function representing the displacement interpola
tion matrix, the superscript m denotes the element number m. q(m) is the vector of
nodal displacements for that element, including the three translational components along
the Cartesian coordinate axis and the three rotational components around the same axis.
'I1(m)(x) depends on the element geometry, number of nodes and the degree-of-freedom of
these nodes.
Vnder the same assumption as that in equation (3.17), the corresponding strains at
the element level is written in matrix form using the strain-displacement relationship of
equation (2.13).
(3.18)
where strain-displacement matrix s(m) is obtained by differentiating 'I1(m). Furthermore,
the stresses in each element are related to the strain by the following matrix equation
(3.19)
where E(m) is the elasticity matrix of the element m and its components are given in
equation (2.14). Based on equations (3.17"'3.17), the equation (2.17) for the isotropie
30
3-D Linear Structure is recast into
(3.20)
where f represents the global vector of external loads acting on the finite elements assem
bly, q denotes the corresponding global vector of displacement, which is the assembly of
q(m). The last term represents the transformed work done by the external force, which is
transformed according to the Conservation of Eneryy. The further procedure is discussed
in section (3.2.2). Substituting the equations (3.17"-'3.19) into equation(3.20) yields
where
[M]{ij} + [C]{q} + [K]{q} = {f},
[M] = L f pCm)rJ(m)T rJ(m)dv(m) , m }v(m)
[Cl = L f ~(m)rJ(m)T rJ(m)dv(m) , m }v(m)
[K] = L f s(m)TE(m)s(m)dv(m), m }V(nl)
(3.21)
where [M], [Cl and [K] are n x n matrices referred to as the mass, damping and stiffness.
The size n equals to the number of degrees of freedom of the structure, which usually
represents the displacements and angular deformation of a given point on the discretized
structural mesh. Lastly, q and f are the displacement and force vectors of the structure
respectively. At every time step, once the [M], [Cl and [K] are known, the structural
equations of motion represented by equation (3.21) can be integrated in time based on the
time-dependent loading f to provide the displacement vector q.
31

MSC/NASTRAN ofIers two approaches to analyze transient dynamic responses: Modal
or Direct. The former uses a limited number of mode shapes to formulate the equation
in terms of the generalized mass and stifIness matrices that are diagonal matrices, and
recovers the physical response by superimposing the individual modal responses. The later
approach marches the equations forward in time to provide the physical response.
MSC IN ASTRAN, also, provides two types of solution sequences for transient response
analysis with time-dependent loads: the direct linear transient solution sequence (SOL109)
and nonlinear/linear transient solution sequence (SOL129). Although both of them can
perform transient response analysis for linear-element structures, SOL129 is used in the
present study due to the fact that SOL109 does not allow the specification of both initial
displacements and velocities.
3.2.2 Time Integration Approach
To solve the structural equations of motion, the system of ordinary difIerential equa
tions (2.6) and (3.21) are integrated in time using the second-order accurate f3-Newmark
method [361, which is also used to analyze the transient response of a structure in the
commercial software-MSC/NASTRAN [401. This implicit multi-step scheme is derived by
using a central finite-difIerence representation of the velocity Ct and acceleration q vectors
and q and f are averaged over three time levels, which are described below,
32
(3.22)
(3.23)
(3.24)
(3.25)

Equation (2.6) is then recast into
([M] + B + [K]) qn+l = (2[M] _ [K]) qn + (_ [M] + B _ [K]) n-l Ât2 2Ât 3 Ât2 3 Ât2 2Ât 3 q
+ ~ (rn+! + rn + rn-l) . (3.26)
The first time step is advanced using a first-order scheme, with
(3.27)
The startup scheme then becomes
( [M]) 1 ([M] ) 0 [M] ·0 CO
2 (Ât)2 q = 2 (Ât)2 - [K] q + 2 Ât q + , (3.28)
where 4° is the inertial velocity ofplunging and rotation (assumed to be zero in this study).
The transient solution is then obtained by solving equation (3.26) at each time step.
3.2.3 Finite Element Model
The finite element method provides many options for the structural dynamic analysis
of aircraft wings. The proper type and quantity of elements depends on the nature of the
structure. Wing bodies are commonly modeled as the assembly of plate or shell elements
which have trilateral or quadrilateral elements [23]. MSC IN ASTRAN offers several types
of elements such as the trilateral element (CTRIA3, CTRIA6) or the quadrilateral element
(CQUAD4, CQUAD8) for the linear elastic structure. Both CTRIA6 and CQUAD8 are
higher order elements that use quadratic shape functions. This provides higher order accu
racy for the interpolation than elements that use a lower order shape function. Although
the errors caused by lower order elements can be made up with a finer mesh, on a practical
standpoint, the relatively coarse mesh with lower order shape function is preferred for the
reason that this mesh should not result in a large deviation from the exact solution. In the
33

present study, a simplified wing model eomposed of varying-thickness linear plate elements
is employed.
CTRIA3 and CQUAD4 elements are three-node and four-node isoparametrie plate
elements respeetively, whieh have linear shape funetions. These elements allow for various
thieknesses at each of the nodes, and each node has a six degree-of-freedom eorresponding
to the three translational and three rotational coordinates in the global reference system.
In an aeroelastie analysis, sinee the fluid mesh on the wing surface is much finer than that
of the structural model mesh, the nodes on the wing surface are mapped, as discussed in
section (3.3), onto these structure elements for the information exchange between the fluid
field and FE structural model. Sinee the four nodes of a quadrilateral element are not
always in the same plane, and the nodes of a triangular element are independent of the
shape function, the CTRIA3 is employed in the present study for its sufficient accuracy for
this type of fluid-structure interface.
3.2.4 Damping Characteristics
For an aircraft wing, the damping is mainly due to aerodynamic forces, viscous forces
and material hysteresis. The aerodynamic damping is due to the time-dependent aerody
namic loads generated by the structural motion. The magnitude of aerodynamic damping
is largely due to the freestream velocity, angle of attack, and any other factors that affect
the flow field. Thus in an aeroelastic computation, aerodynamic damping is calculated by
the flow solver.
Unlike aerodynamic damping, viscous and material damping depends primarily on the
shape and material used for constructing the aireraft wing. Viseous damping is eaused by a
viscous force that acts in the opposite direction to the motion of the wing and its magnitude
is proportional to velocity. The viseous damping force is usually modeled as a funetion of a
damping coefficient and the velocity of the structure. From equation (3.21), the damping
34
force due to viscous effects is modeled as the product of matrix [Cl and the velocity vector.
In this work, the viscous forces are not considered and matrix [Cl is set to zero. Material
damping is due to the total energy 1088 of the motion caused by material hysteresis which
results in heat radiation. In this study, material damping is not considered.
3.3 Fluid-Structure Interface
In the previous two sections, the flow and structural solvers for a typical wing section
and an isotropie wing are developed and presented separately. To perform an aeroelastic
analysis for these two structural models, a fluid-structure interface algorithm which is
consistent with the level of accuracy of solvers should be carefully considered. Generally,
the interface should satisfy two requirements: first the geometric conservation law for the
displacement transfer from the finite element nodes of structure to the wall nodes of fluid
meshj second the conservation of load and energy for the load transfer from the pressure
distribution of fluid mesh to the nodal load of structural.
The fluid and structural grids are generally different, the former being much finer in
order to resolve local flow features, requiring higher spatial resolution. Thus the surface
nodes do not match and therefore, transfer of loads and displacements between the two
grids are based on interpolation algorithms. The algorithms utilized must be chosen as not
to impede on the quality of the solution sought on the respective grids. Most importantly,
these algorithms must respect the principles of conservation of loads and energy. In this
case, an approach formulated by Brown [8] for the transfer of loads and displacement that
are consistent with the conservation laws is employed.
In the case of the temporal resolution, the flow solver once again requires smaller time
steps. However, since the cost to solve the structural equations are negligible if compared
to the flow solver, advancing the structural equations of motion with a small time step that
35

is identical to that used for the flow solver, will not affect the total cost of the aeroelastic
simulation.
The foilowing sections describe the displacement and load transfer algorithms, as weil
as, the manner in which the flow and structural solvers are synchronized.
3.3.1 Displacement Transfer
The method of Brown [8] simply states that an individual fluid node that exist on the
aircraft wing surface can be rigidly tied to a structural element. As the structural element
is deformed, the rigid link will displace the fluid grid accordingly. This section develops
the transfer functions for the displacements based on this statement.
Consider a structural model that consists of shell elements that have three nodes and
six degrees of freedom at each node. A point X on the fluid mesh can be connected to a
structural element by forming a normal vector from the surface of the structural element to
the fluid point as shown in figure (3-2). Let x represent a point on the structural element.
Then the displacements u(X) and rotations UO(X) of the fluid point, X, can be represented
by the following equations
u(X) = u(x) - (X - x) x U8(X),
U8(X) = U8(X),
(3.29)
(3.30)
where u(x) and U8(X) are the displacement and rotation at x. In figure (3-2), the qi(i =
1,2,3,7,8,9,13,14,15) are the global translational coordinates of the nodes of element m.
The displacement of point u(x) can be interpolated using the linear combinat ion of the
nodal displacements q with equation (3.17). The displacement of a point on the fluid mesh
36

Figure 3-2: Displacement Extrapolation System
can then be rewritten as,
where
u(X) = [71(m)(X))' q(m) - [X - x). [71~m)(x)). q(m) ,
118(X) = [71~m) (x)] . q(m) ,
o (z - Z) (Y - y)
[X-x]= (Z-z) 0 (x-X)
(y-Y) (X-x) 0
(3.31)
(3.32)
(3.33)
Next, introduce the displacement extrapolation matrix [N(X)) and rotation extrapolation
matrix based on the nodal displacements q of the corresponding element, the displacement
and rotation vectors can be written as
u(X) = [N(X)). q(m),
Us(X) = [NB)' q(m) ,
37
(3.34)
(3.35)
where the extrapolation matrices are defined as,
[N(X)] = [71(m)(x)] - [X - x] . [71~m)(x)],
[Nl/(X)] = [71~m)(x)].
(3.36)
(3.37)
The translation and rotation extrapolation matrices depend on the displacement interpola-
tion matrix (or shape function) 71(X). Since the shape function employed in MSC/NASTRAN
is unknown to us, an area-based shape function is used in this study. For the element m,
whose area is divided into three sub-areas Al. A2, and A3 as shown in figure (3-2), the
translation shape function 71(m) and rotation shape function 71~m)(X) are written as
[71(m)(x)] = [[A~m)][O][A~m)][O][A~m)][O]] ,
[71~m)(X)] = [[O][A~m)][O][A~m)][O][A~m)]] ,
(3.38)
(3.39)
where [0] is 3 x 3 zero matrix, [A~m)], [A~m)] and [A~m)] are defined by the area coordinates.
For example, [A~m)] can be written as
Al 0 0
o Al 0
o 0 Al
(3.40)
At a preprocessing stage, the shape fuIlctions are computed once and used during each time
step. If X is represented as the centroid of a surface fluid element, then the nodes of that
fluid element have to be displaced. The displacement of these nodes can be computed by
a distance-weighted averaging of the displacement of the centroids of the element surfaces
around this point. After obtaining the displacements for each fluid mesh point, the internai
fluid field mesh nodes can be moved by applying the mesh deforming algorithm presented
in section (3.1.7).
38

3.3.2 Load Transfer
The load can be transfered from fluid mesh points to finite element nodes, in a similar
manner, in which the displacement was transfered from the finite element nodes to fluid
mesh points. The transfer of loads algorithm must observe the conservation of loads and
energy principles. If f is external force vector acting on the structural nodes and 8q denotes
the displacement vector, then,
f . 8q = r p8udS, Jav (3.41)
where p is the pressure on the fluid element and S is the product of the normal vector
and the area of the fluid element. Substitute equation (3.34) and discretize the integral to
yield,
(3.42)
for each structural element, we can write
(3.43)
where fi is the nodal force vector. The components fi at each element node are shown
in Figure (3-3). Summing up the components of fi at every structural node gives the
transfered force at that node. By summing up the forces acting on the structural nodes,
(3.44)
we can validate that this force transfer satisfies conservation of load and energy.
3.3.3 Coupling Procedure
The fluid and structural solvers, as described in the previous sections, have been de-
veloped with difIerent numerical methods. An ideal computational aeroelastic simulation,
would require the simultaneous solution of both solvers at each time step. However, this ap
proach is both computationally challenging and costly. Therefore, in this work both solvers
39
CFDMesh
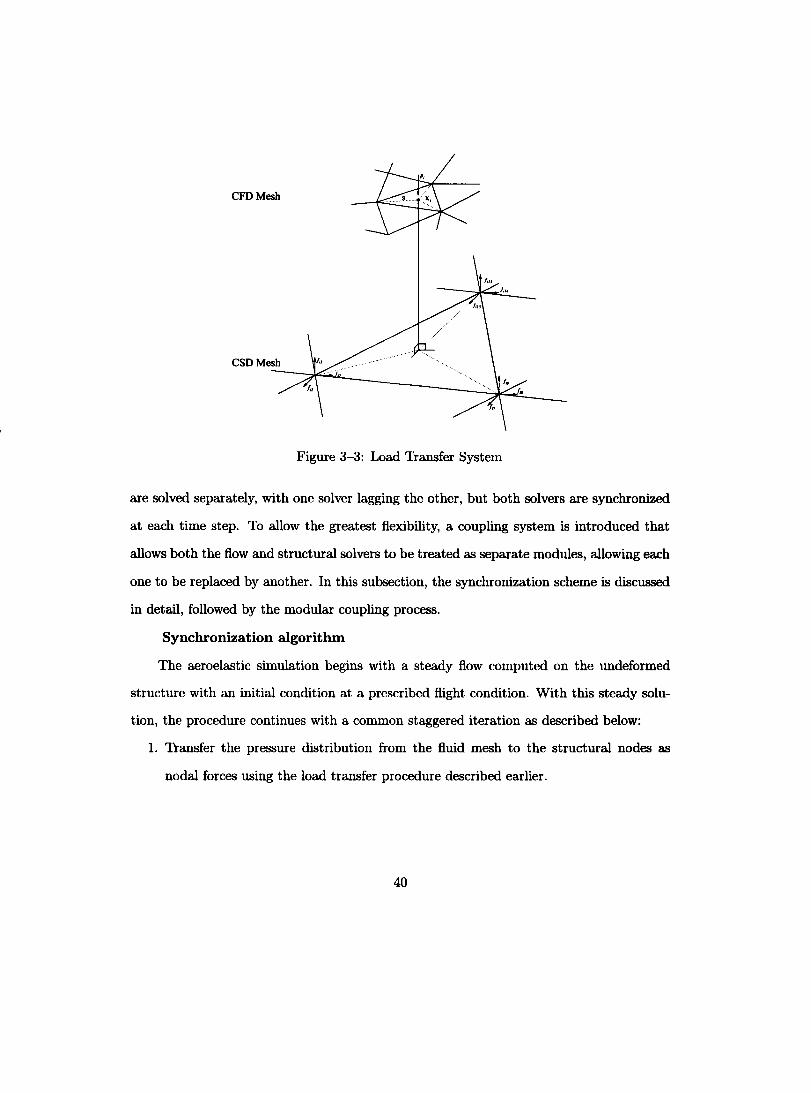
Figure 3-3: LoOO Transfer System
are solved separately, with one solver lagging the other, but both solvers are synchronized
at each time step. To allow the greatest flexibility, a coupling system is introduced that
allows both the flow and structural solvers to be treated as separate modules, allowing each
one to be replaced by another. In this subsection, the synchronization scheme is discussed
in detail, followed by the modular coupling process.
Synchronization algorithm
The aeroelastic simulation begins with a steOOy flow computed on the undeformed
structure with an initial condition at a prescribed flight condition. With this steOOy solu
tion, the procedure continues with a common staggered iteration as described below:
1. Transfer the pressure distribution from the fluid mesh to the structural nodes as
nodal forces using the 1000 transfer procedure described earlier.
40

2. Advance the structural equation of motion with the ,6-Newmark method using the
stored displacements at time steps (n - 1) and (n - 2) and the 1000s at n, (n - 1),
(n - 2) to acquire the displacement at the nth time step.
3. Transfer the displacements from the structural nodes to the fluid element centroids
using the displacement transfer algorithm. Perturb the surface fluid nodes based on
the displacements at the fluid centroid.
4. Advance the fluid equations to obtain the pressure distribution for the nth time step
using the stored displacements and flow field at the (n - 1) and (n - 2) time steps.
Steps (1 '" 4) are repeated until the expected time history of the solution are ac
quired. The resolve and attain the desired simulation, the time step used for both the
flow and structural solvers are of primary importance. Flow solvers generally require small
time steps, limited due to both the need to resolve important flow features and stability
restrictions of the scheme. Structural solvers, however, have no time step limitations.
Figure (3-4) illustrates two common synchronization schemes. The first describes a
simple scheme, where the 1000 is transfered from the flow solver to the structural solve
at the beginning of the time step. The structural solver then OOvances one time step and
provides the flow solver with new displacements. The flow solver, then performs several
Newton iterations to arrive at a converged solution. If too large of a time step is used, the
system cau become unstable, since either the structural solver or the flow solver lags the
other. To prevent inaccurate results due to lagging, very small time steps can be utilized,
however, this approach can have an undesirable effect on the computational cost.
In the second scheme, which is employed in this work, the 1000 is trausfered at the
beginning of the time step. The structural solver than OOvances a provides new displace
ments. Based on the new surface displacements, the flow solver performs several Newton
iterations. The flow solver then, provides the structural solver with new loads and the
41

w" @
W"+I Fluid
CD b 4~~ [ 4~~ E. ë ~ ë
op~ ~ClJt ~lJt
ri> ,~~ ri> ~,fr. ;- ;-.. .. e~
Structure
'1" @ '1"+1
Before Modification
w" @
w"+1 Fluid
CD
Structure
After Modification (Adding sub-iterations)
Figure 3-4: Synchronization Scheme
structural solver repeats the same time step with the new loads. The flow solver, then
repeats the time step based on these new displacements. A repetition of the time step
is defined as a sub-iteration (or coupling instance). Typically two to three sub-iterations
were used in this study. At each sub-iteration, three Newton iterations were used for the
flow solver, which may not be sufficient to pro duce a converged solution. However, since a
couple of sub-iterations are used during the entire time step, the total number of Newton
iterations will eventually produce a converged solution. The advantage of sub-iterations is
that it prevents lagging and allows for larger time steps.
42

FSCOUPLE
FENSAP
Figure 3-5: Schematic of Modular Coupling System for Node-to-element Approach
Modular Fluid-Structure Coupling
The fluid-structure coupling employs a modular form as shown in Figure (3-5). It
consists of four modules: flow solver (FENSAP), structural solver (MSN/NASTRAN),
preprocessor (FSPREPROC), and coupling controller (FSCOUPLE). Apart from the flow
and structural solvers that have been described earlier, the preprocessor and coupling
controller are essential to acquiring aeroelastic solutions.
The preprocessor has two primary functions: first, read the current flow solution and
transfer pressure distribution from fluid mesh to structural nodes (Load Transfer AIgo
rithm)j second, read structural displacements and transfer displacement vector to fluid
surface nodes.
The coupling controller is responsible for enforcing the synchronization scheme de
scribed above. FSCOUPLE achieves this by using TCP /IP sockets for inter-pro cess com
munication between the modules. This pro cess typically functions as follows: first, the
separate modules (clients) are launched. Each module, binds to a TCP /IP port on the
43

local host; second, the FSCOUPLE code (server) is launched and the software binds to the
ports for each module.
Once the connection between the server and the three clients are established, the syn
chronization scheme is implemented by the server sending signals to the clients to either
start or stop a process. When a client has completed its task, such as FSPREPROC suc
cessfully transferring the loads to the structural solver, it sends a signal to the server. Loads
and dis placements are transfered between modules through files. In the future, the loads
and displacements will be transfered through the sockets, thereby reducing communication
time.
44

CHAPTER4 Isogai Test Case
The chapter presents aeroelastic simulations of a sweptback wing section model. Flut
ter solutions for subsouic and transonic flows are calculated, and a complete trausonic
flutter bouudary is presented.
4.1 Physical Model
To accurately portray the observed dynamic behavior of sweptback wings, lsogai [29]
carefully chose the structural parameters of this model by examining its responses to small
perturbations. The result was that the elastic axis was placed a semi-chord length ahead of
the leading edge of the airfoil and the ratio of uucoupled natural frequency in pluuging and
pitch was set to 1. This case has been numerically investigated by several researches [13,
30, 1, 49] with the following structural parameters,
a - 2, position of elastic axis, from mid-chord, in uuits of semi-chord length b,
f..L 60.0,
XQ 1.8,
r 2 Cl< 3.48,
Wh 1 =
WQ
ln the present study, the semichord length,b is 0.5 m, and the pluuging natural frequency
Wh is 100 rad/s. The shape of the airfoil is that of a NACA64AOlO (NASA Ames model
10.6% thick with a pointed trailing edge [11], comparing with the analytical model with a
squared trailing edge).
45
4.2 Mesh Generation
FENSAP is a 3-D unsteady Navier-Stokes flow solver. 2-D problems are solved by
extruding the 2-D domain in the wing span direction and imposing symmetric boundary
conditions on the symmetric planes. The mesh used in FENSAP is generated in the domain
enclosed by these two symmetric planes, the far-field and the wing surface. The far-field
is placed 20 chord lengths from the wing surface.
In the present study, two hexa meshes are generated to study the effects of mesh
resolution on the solution. The first, designated as 'General Mesh' will be used for the
majority of the calculations to be presented in the following sections. The second, labeled
as 'Transonic Mesh' is similar to the initial mesh but with a finer mesh resolution or higher
density in the vicinity of the shock wave which is present at transonic speeds. The hexa
meshes are created by generating a 2-D hexahedral C-mesh on one of the two symmetric
boundary surfaces and extruding it to the other symmetric boundary surface. More details
of the hexa meshes will be provided in subsequent sections.
4.3 Numerical Setup
To illustrate the complete flutter boundary, flutter points are calculated at Mach
numbers 0.7, 0.825, 0.85, 0.875, and 0.88. The complete procedure to compute a flutter
point, is as follows:
1. Compute the steady-state solution at the given free-stream Mach number Mao, free
stream density Pao, and temperature Tao at zero angle of attack. Employ mesh
adaptation to optimize the mesh for the given flight condition.
2. Compute an initial unsteady solution by forcing the motion of the airfoil for three
cycles of oscillation at the frequency of the plunging mode between ± 10 angle of
attack.
46
3. Solve the Huid and structural systems simultaneously with the tight coupling ap
proach to observe the How-induced oscillation. Based on the variation of plunging
displacement h(t) and the angle of attack a(t), estimate the neutrally stable oscilla
tion point (Hutter point).
4. Holding Moo and Poo fixed, modify the speed index VI' Repeat steps 2 '" 3 until the
speed index at Hutter is achieved.
4.4 Results
This section presents aeroelastic solutions for the Isogai test case for various free
stream Mach numbers. The solutions are based on a 320 x 31 x 2 C-type hexa mesh for
the NACA64AOlO airfoil, as shown in Figure (4-1). There are 320 points wrapped around
the profile ofthe airfoil and its wake (270 points on the profile of the airfoil), and 31 points
are distributed radially from the profile of the airfoil to the outer boundary.
4.4.1 Initial solution
In FENSAP, the strategy to obtain an initial steady solution is to start the solution
pro cess with higher artificial viscosity (AV) coefficients for the purpose of improving the
robustness of the code, and reduce gradually the AV coefficient to approach the "exact"
solution. Every AV coefficient corresponds to a parametric cycle.
The initial solution was obtained using a fust-order artificial viscosity (AV) scheme.
The How solver was initially launched with an AV coefficient of q = 5, f2 = 0, where fI is
the AV coefficient for the first-order AV tenn and f2 corresponds to the second-order AV
term. The simulation is then restarted using the current final solution with a smaller AV
coefficient and CFL nwnber. This process is repeated until the lowest AV coefficient that
provides a numerically converged solution is achieved. During this process, the AV scheme
is switched from fust-order to second-order, where q = 0 and f2 takes on a non-zero value.
Artificial viscosity is required in numerical analysis to construct a stable scheme that will
47

(a) Overview of Grid
(h) Close-up View
Figure 4-1: C-type Hexa Mesh for NACA64AOlO airfoil. 320 x 31 x 2
48

guarantee convergence. However, if the contribution from AV is too large, it will have a
negative impact on the quality of the solution. Therefore, the contribution from AV should
be the lowest possible to achieve a converged solution. In this work, the final simulation
was obtained with an AV coefficient of €2 = 0.02 for subsonic case. For transonic test
cases, the second-order AV scheme with shock sensor is used for its ability to reduce to a
fust-order scheme at the shock and second-order elsewhere. The AV coefficient € is set to
0.004 for both the fust-order and second-order term [3]. In each case, the artificial viscosity
is lowered gradually in parametric cycles until a divergent solution appears. This approach
guarantees the best available initial solution to launch an unsteady ca1culation.
Figure (4-2) illustrates the convergence of the residual for a steady inviscid transonic
flow at Mach 0.825. Five parametric cycles were employed with each designated to an
AV scheme with a predefined AV coefficient. The spikes indicate that the AV coefficient
has been lowered. The residual usually increases when the coefficient is lowered but will
eventually reduce. The last spike in the residual corresponds to the final computation with
the lowest AV coefficient. This simulation required several thousand iteratiollS to achieve
a machine zero convergence.
Figures (4-3)a and (4-3)b illustrate the pressure distribution at Moo = 0.7 and Moo =
0.825. The solution was obtained at a zero angle of attack. Figure (4-3)b demonstrates
the presence of a shock wave on both the upper and lower surfaces. Figures (4-3)c and
(4-3)d illustrate the respective Mach contours. The convergence of the contour lines in the
later plot, signifies the location and strength of the shock wave.
4.4.2 Pitching Airfoil
The code and grid are validated by forcing the wing section to pitch around its quarter
chord. The lift coefficient versus angle of attack is compared with the experimental NACA
64AOIO CT6 [11] data. Here the computations are performed at the freestream Mach 0.796,
49

10'" r---,.----r---,-----r----r---,------r-----,
10-'O'-----'----'--_-'--_---' __ --'-__ -'--_---' __ -.J o 1000 2000 3000 4000 5000 6000 7000 6000
Tlme Slap N
Figure 4-2: Residuals for the Steady Inviscid Transonic Flow (Mec = 0.825)
at a mean angle of attack ao = 0°, with a maximum angle of attack am = 1.01°, and a
reduced frequency Wr = 0.202. A minimum of five cycles of computation are required in
order for the periodic steady state flow to be established, and allow the time-accurate lift
and moment coefficients to converge. Figure (4--4)a-d show the hysteresis loop, the CT6
experimental results and the evolution of Cl and Cm in time. The coefficient of lift hysteresis
loop compares weIl with the experimental data for an inviscid simulation. The coefficient
of moment provides the correct trend, but the magnitudes of the moment coefficients do
not compare weIl with experimental values. One reason for the discrepancy between the
computational and experimental moment coefficient may be due to the fact that only an
inviscid model is considered in these testcases. Accurate moment coefficients require accu-
rate representation of the pressure distribution at the trailing edge which is only possible if
viscous terms are included. Nevertheless, the aeroelastic solutions based on these moment
50
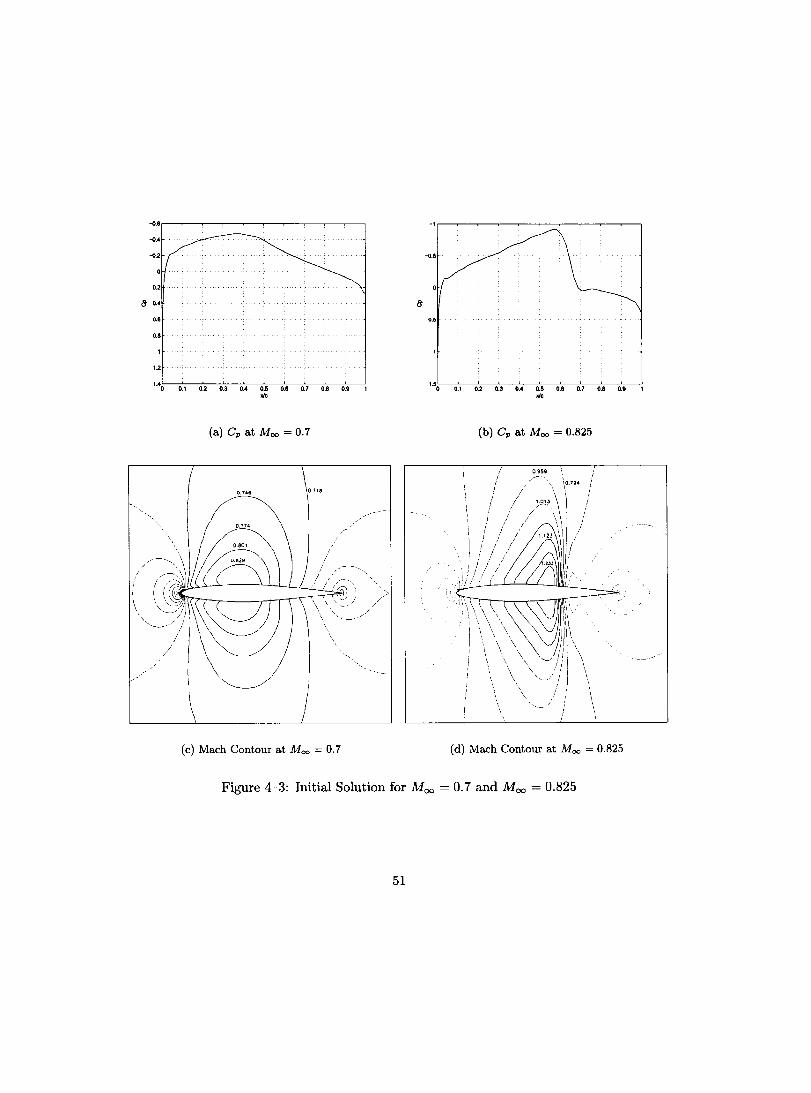
-<1.2
0.2
8" 0.4
./
0.6
0.6
1.2
1.4~0 ----:o:':.1-~O'2:---:'0.3:----=0 .. ';---:0'7.5 ----:0:'::.6-0~.7:---:'0.8:----=0.-:-9 -----.l JI.
(a) Cp at Moo = 0.7
(c) Mach Contour at Moo = 0.7
-<1.5
0.5
~ ~ U M ~ M M UMM JI.
(b) Cp at Moo = 0.825
(d) Mach Contour at Moo = 0.825
Figure 4-3: Initial Solution for Moo = 0.7 and Moo = 0.825
51

coefficients were able to provide a flutter boundary curve that compares well with other
numerical data.
The Mach contour and Cp distribution at every quarter of the period are illustrated
in figure (4-5) and (4-6). The figures demonstrate the movement of the shock wave as
the airfoi! undergoes a pitching motion. The accurate capture of the location of the shock
wave is important for aeroelastic simulations.
4.4.3 Aeroelastic Simulation
To obtain an aeroelastic simulation, a forced oscillation for three periods was ini
tially used to eliminate transient solutions and most importantly to excite the fundamental
modes of vibration. After three periods of forced oscillation, the Fluid-Structure Interface
is started and the displacements are no longer prescribed but computed based on the struc
tural equations of motion. The simulation is run for several time steps until either a stable,
neutrally stable, or unstable response is computed.
In the following computations, the flow simulation is based on an inviscid solution, and
at an artificial viscosity level that is similar to the value used to obtain the initial solution.
At each time step, two sub-iterations were performed, with a maximum of three Newton
iterations per sub-iteration. A convergence criteria is also established. Often during the
second sub-iteration, only one or two Newton iterations are used, if the convergence level
satisfies the criteria. The simulations were computed on a SGI Origin 3800 shared memory
machine and generally required a wall clock time of ten hours on 12 processors.
Unsteady calculation at Moo = 0.825
Figures (4-7)a-b illustrates the convergence of the flow solver at each time step. Fig
ures (4-7a) shows the convergence from the initial condition upto 200 time steps and figure
(4-7)b illustrates the convergence of the fiow solver, when the aeroelastic simulation bas
reached a periodic steady state solution. The simulation was computed at a Mach number
52
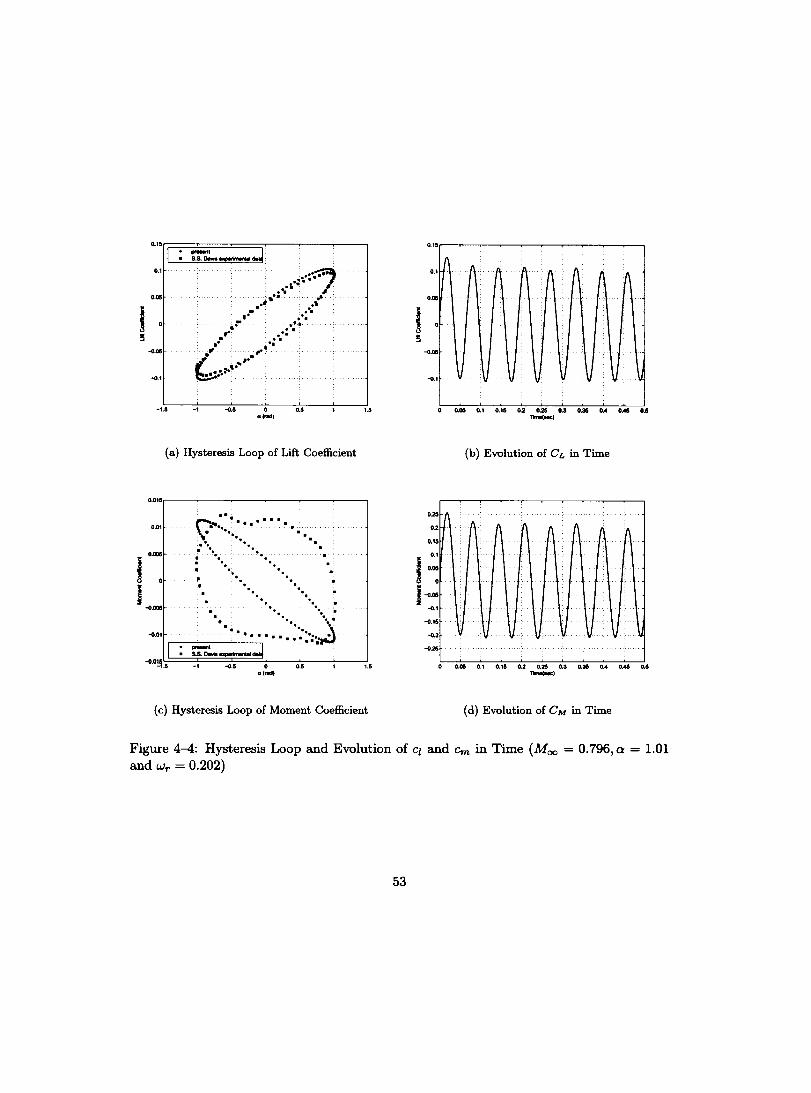
1 '5
1 1
0.1·rr==:===:::;:===='--~--~-1
~~~J 0.1
0.00
-0.00
-0..1
.. \~.:.:~. ,.. 1 . .... ~ . :..... .. '
,6 .\!: .- : .'. 1- .' • . - ..... . . . " .'. . . .
" '. b· .~ , .. "..
.-.. ,." ......
-1 -o. .. o 0" a (Nd,
(a) Hysteresis Loop of Lift Coefficient
t.'
0.01.r-----~--~--~--~-__,
0.01
0.000
., ~
.. . ... .... . . . . •... . ..... . .. ~. ~~~'.. ..... , ... .. . '.. . ................. < .. .'
-0..000
-0.01
. ..... '.... . ... " •••• w •• • ::.:.: ••.•••• "~
••• ..:J ,1 ~00.i0~..J.
-O'~~ .. ~===-~t====~-o.~ .• ====~o~--o~ .• ~-~-~t .. 0(*)
(c) Hysteresis Loop of Moment Coefficient
1 ~
0.15
0.1
0.00
-0..00
-o.t
0.25
0.2
0.15
O.t
1 0.00
o
1-0.·00
-o..t -0.15
-0..2
-0..25
fi f\ A 1\ f\ 1\ fi fi
1
V V V V V V V \J
~ ~ ~ ~ ~ U ~ ~ ~ U ,-Mel
(b) Evolution of CL in Time
~ ~ ~ ~ ~ u ~ ~ ~ U '-Mel
(d) Evolution of CM in Time
Figure 4-4: Hysteresis Loop and Evolution of Ci and Cm in Time (Moo = 0.796, Cl: 1.01 and Wr = 0.202)
53
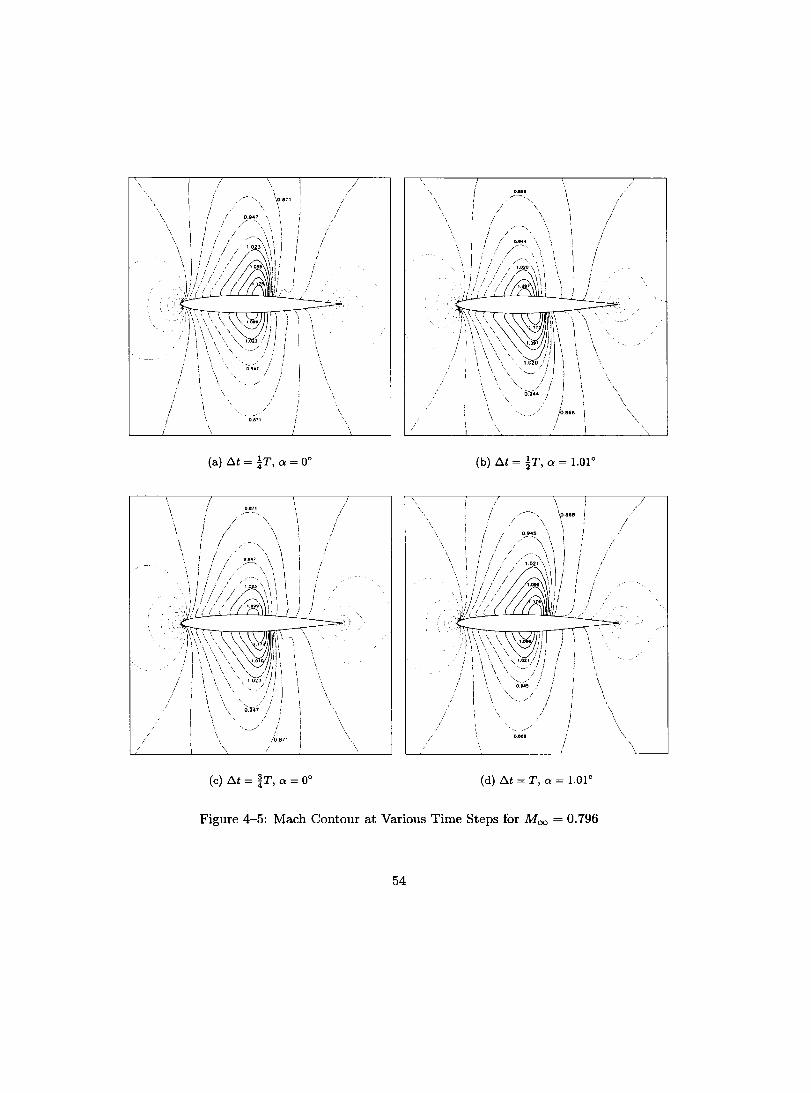
/ /
\ \
/-
, 0_947 \ ,/ ...... '
! /
(a) f::J..t = ~T, Q = 00
:0,871
(c) f::J..t = ~T, Q = 00
\
/ \
i
f i
0.8IIa .---,
1
! /0.868
!
(h) f::J..t = ~T, Q = 1.010
1 !
,
1 /
(d) f::J..t = T, Q = 1.010
Figure 4-5: Mach Contour at Various Time Steps for Moo = 0.796
54
\
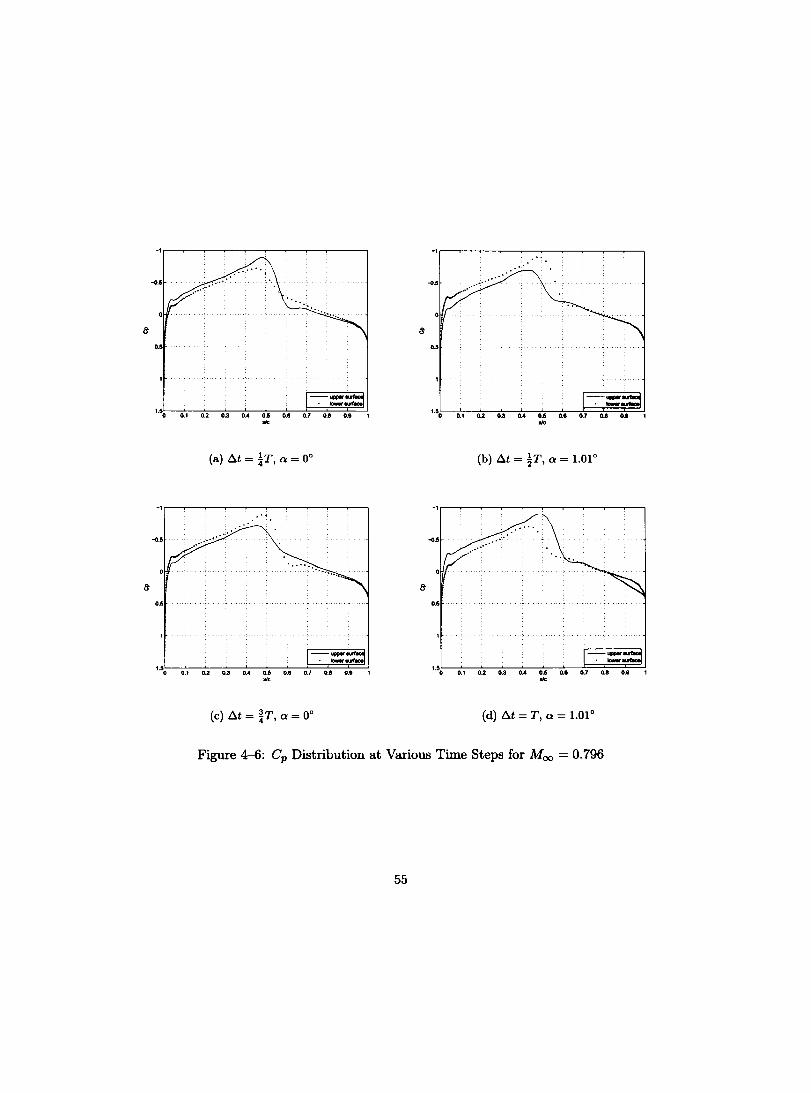
(a) l:l.t = tT, a = 00 (b) l:l.t = ~T, a = 1.010
... -0.5 p ......... .
o
0.5
(c) l:l.t = ~T, a = 00 (d) l:l.t = T, a = 1.010
Figure 4-6: Cp Distribution at Various Time Steps for Moo = 0.796
55

of 0.825 and a speed index, VI = 0.682. The Cp distribution and Mach contours are shown
in figures (4-8) and (4-9).
Aeroelasticity solution
The plunging and pitching responses of the airfoil are shown in figures (4-10 rv 4-18)
at various Mach numbers and speed index. Compared with the response at transonic flow,
the structure in the subsonic flow is more sensitive to the speed index. For instance, the
flutter point speed index for Mach 0.7 is 1.23, when the speed index was changed to a
slightly higher value of 1.30, the response of the airfoil diverged rapidly as shown in Figure
(4-11). For transonic flow, however, the transition from stable to diverged response is not
as abrupt due to the nonlinear effect at this speed range. Figure (4-14) shows the response
at Mach number 0.825 and of the speed index 0.682. For the indexes less then 0.682 the
response is clearly stable as shown in Figure (4-13) and the response damped until the
structure restored to its initial position.
To obtain a periodic steady state solution for the neutrally stable responses, several
periods in the order of 10 to 15 were used, as demonstrated in figures (4-11), (4-14), and
(4-17). This is necessary to eliminate initial transient solutions that appear as spikes and
often persist for three to five periods after the forced oscillation is replaced by the structural
equations of motions.
Flutter Boundary
The flutter boundary can be determined by finding the neutrally stable solution at
various Mach numbers. Figure (4-19) shows the present results and those of Ref. [1,30, 49J.
The results predict the transonic-dip fairly well. As the Mach number approaches unit y,
the flutter speed index dips for a small range of Mach numbers. The present solver obtained
the bottom of "transonic dip" at a speed index 0.52 at Mach number 0.875, and is within
5% compared to other results.
56
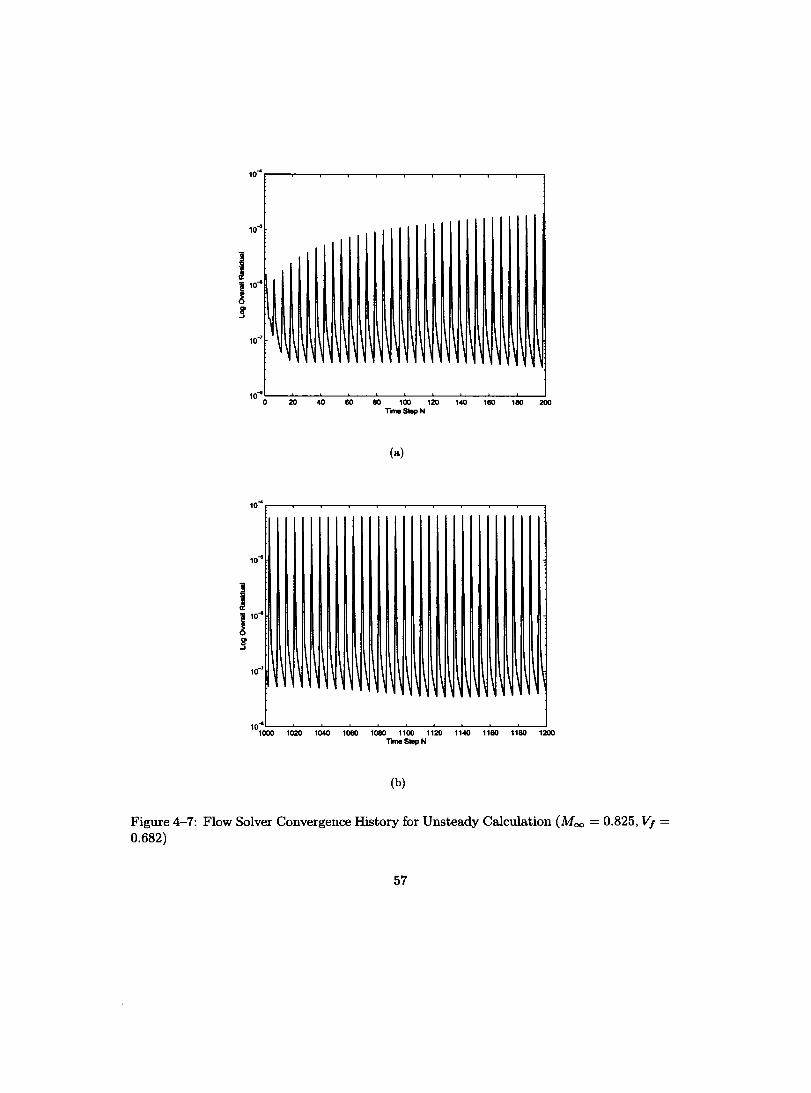
la"
10"L---~--~--~--~--~--~--~--~--~~ o 20 40 60 60 100 120 140 160 160 200
T1meSIopN
(a)
10"L-__ ~ __ ~ __ ~ __ ,--__ ,--__ ,--__ ~ __ ,--__ ,------l 1000 1020 1040 1060 1060 1100 1120 1140 1160 1160 1200
T .... SIopN
(b)
Figure 4-7: Flow Solver Convergence History for Unsteady Calculation (Moo = 0.825, V, =
0.682)
57
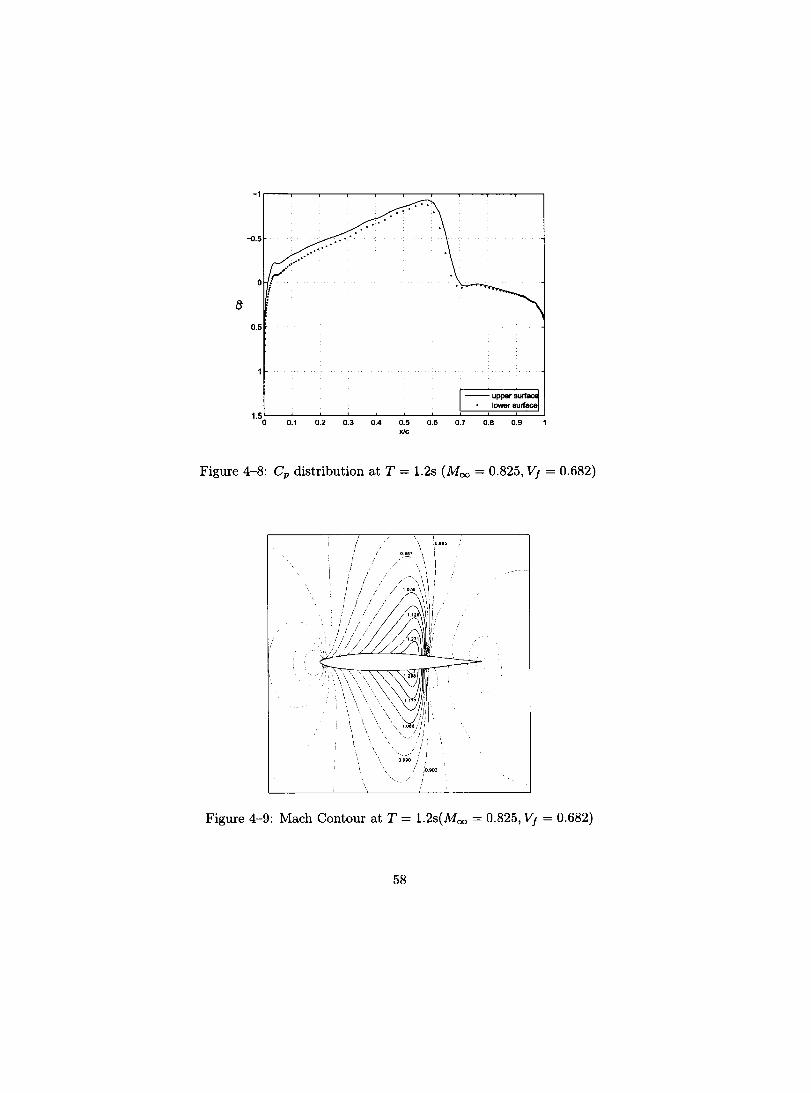
-1r---r---.---.---.----.---r---r--~--~--~
.' .
-0.5 .. ' ,-/ ........ .
o : !
0.5
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 xie
Figure 4-8: Cp distribution at T = 1.2s (Moo = 0.825, VI = 0.682)
Figure 4-9: Mach Contour at T = 1.2s(Moo = 0.825, VI = 0.682)
58

~ .., c ID
i c
0.02
~ ~ ~ 0.015 .. .. .. .. .. ..
0.01
0.005 , ,
of--_...J
r===hibl -~
..
.~ -0.005 .... ".' ~ " ..
J 11.
-0.01 ... ,. ' .....
-0.015
i i i
-o.020'-----0 ..... 2----0'-.4---0 ..... 6----0'-.8---..J......----'1.2
Time(s)
Figure 4-10: Damped Stable Response (Moo = 0.7, VI = 1.20)
~
0.02r-----r----.----.-------,.------r..:.
I==. =hlba~1
~ ~ ~ 0.015 ::
.. 0.01 .:
i 0.005
i I!! ot---~
1 r -0.005
1 -0.01 .. ' ' ..... ,:.
: : -0.015
ï i ï
-0.020'-----0 ..... 2,----...,0'-.4---0 ..... 6,-----0'-.8----'-----:'1.2
Time(s)
Figure 4-11: Neutra! Stable Response (Moo = 0.7, VI = 1.23)
59

DI .Si 2' .01 IL
0.04 r------r----.-------r-----r------,r------,
Cl 0.03 ......... -
..
V V V -0.02
-0.03
-o.04~---L---~--~---~--~~--~ o 0.2 0.4 0.6 0.8 1.2
Tlme(a)
Figure 4-12: Divergent Response (Mao = 0.7, VI = 1.30)
: : : : -0.01
..
V V V -0.02
-o.030~---0.L.2---0..L.4---0:-'-.6---0...J..8.,------'------'1.2
Tlme(a)
Figure 4-13: Damped Response (Mao = 0.825, VI = 0.66)
60
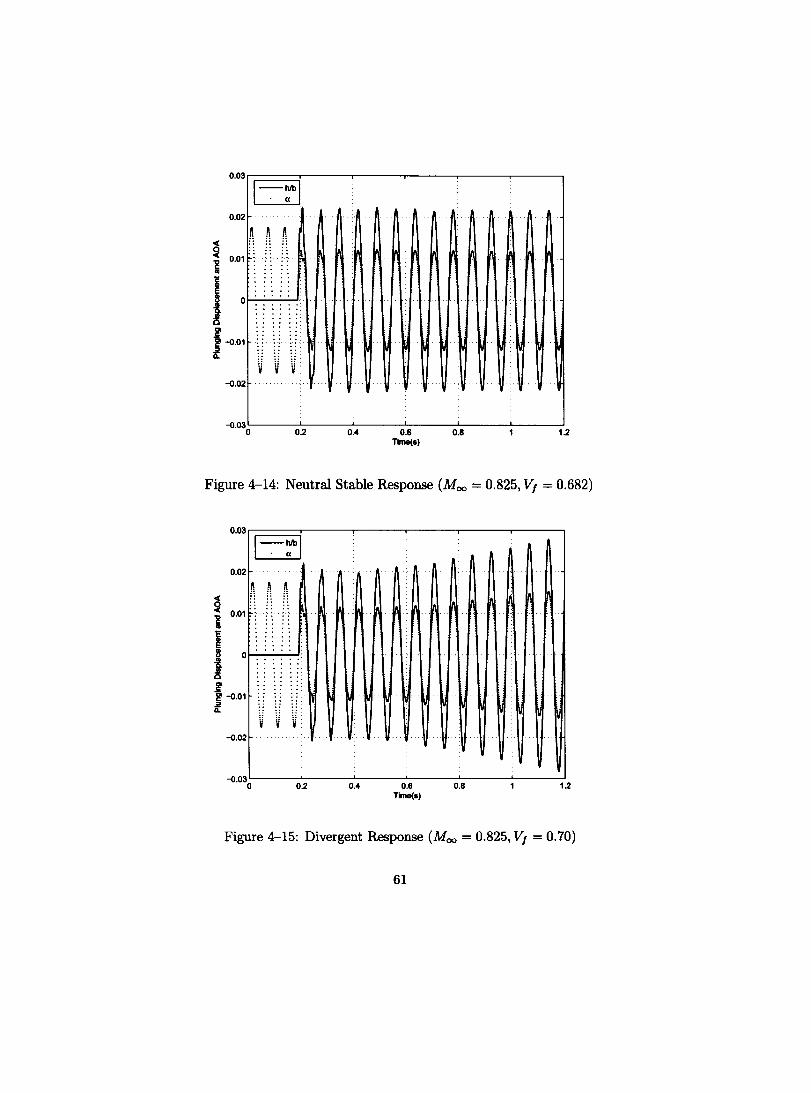
O.03,-----.------r---....-------r---.--------,
El 0.02 .. -
.-
v V V -0.02
-o.030L----0.L2-----J0.-4 -----l0.6---0....l..8---..I....---......J
1.2
Time(s)
Figure 4-14: Neutral Stable Response (Moo = 0.825, VI = 0.682)
0.03.-----,------r---....-------r---.---.----,
El 0.02
-< ~ ~ ~ ~ 1 0.01
j ol---....J
1
: :
r : : •
!!' -0.01
t. V V V
-0.02
0.2
...
0.4 0.6 Tome(s)
0.6 1.2
Figure 4-15: Divergent Response (Moo = 0.825, VI = 0.70)
61
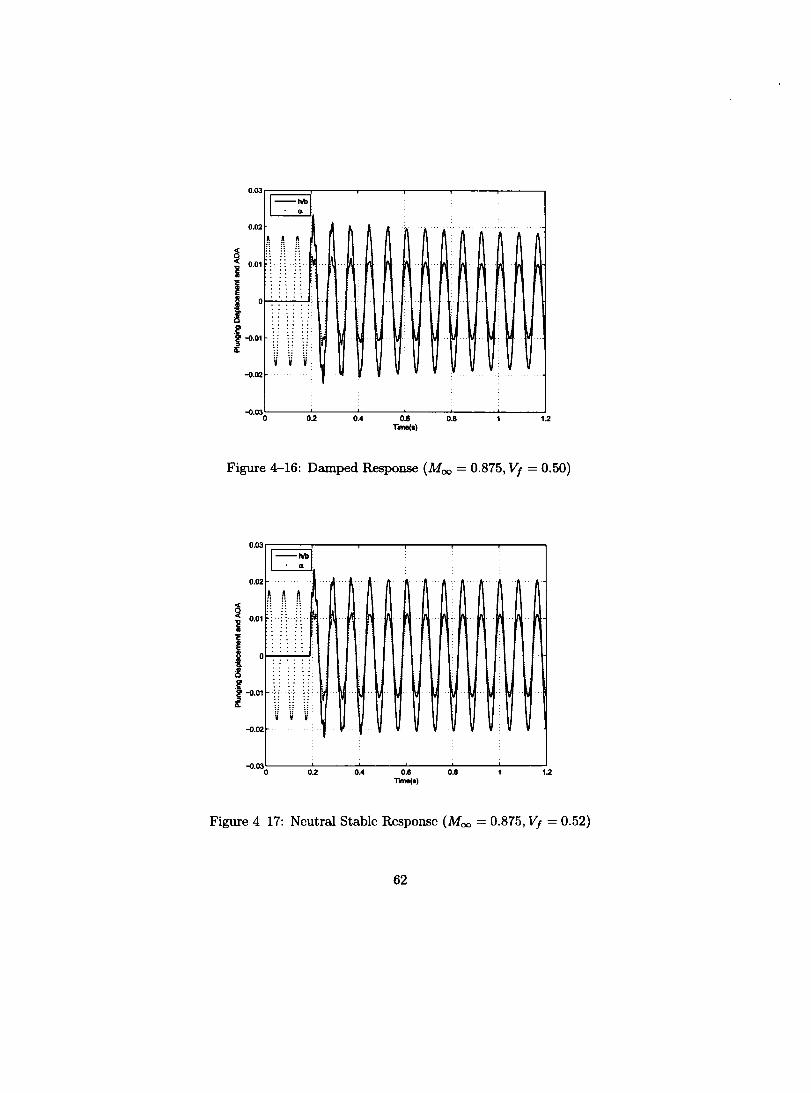
o.03r===::r----.-----,----,.-----,r-------,
EJ 0.02
g §' -0.01 iL
..
V v V -0.02
-o·030~--O~2~-~0.~4--~0~~--~0.8---~-~12 Tme(a)
Figure 4-16: Damped Response (Moo = 0.875, VI = 0.50)
O.03r----,-----.-----,----,.------,r-------,
0.02
~ ~
~ t\ ~ ~ i 0.01
lot------'· . . . . i! .~ ~ -0.01 iL
-0.02
-o·030L---0~2~-~0.~4---0~.8---0~~---~-~12
Time(o)
Figure 4-17: Neutra! Stable Response (Moo = 0.875, VI = 0.52)
62

O.03r----r------,----,-----r------,------,
El 0.02
~ ft oC 1 0.01
i !!' 1-0·01
V V V -0.02
-o·030~--~02~--O~A--~O~.8--~OB---~--~12
Time(.)
Figure 4-18: Divergent Response (Mao = 0.875, V, = 0.54)
3
2.5
2
:> )( v -8 .5 1.5
1 III
0.5
OL---~----~----~--~----~----~--~-----" ~ ~ ~ v ~ ~ ~ M ~
Mach Number
Figure 4-19: Flutter Boundary (VI = w5?1t)
63
4.4.4 Effect of High-density Region
In the present study, a general mesh, as shown in figure (4-1), without a high-density
region in the vicinity of the shock wave was used for all test cases. The flow solver was able
to capture the shock wave on this mesh for various Mach numbers. However, a transonic
mesh with a finer mesh resolution in the neighborhood of the flow discontinuity would be
able to locate the shock wave with a higher precision. The finer mesh contains approxi
mately 36,000 nodes compared to 19,800 for the general mesh. Figure (4-20) illustrates a
comparison of the pressure and Mach number distribution obtained from the two meshes
and a close-up view of the transonic mesh. The pressure distribution illustrates that both
grids were able to agree well on the location of the shock. However, for the general mesh,
the flow discontinuity is smeared over a larger number of mesh points, but the transonic
mesh produced a 'sharper' discontinuity as shown in figure (4-20)c.
Figures (4-21) and (4-22), demonstrate the aeroelastic response at a Mach number of
0.825. The fust figure illustrates a neutrally stable response and the second an unstable
response. If figure (4-21) is compared to figure (4-14) a difference between the responses
can be observed. The simulation using the general mesh was obtained at a speed index of
0.682 and for the transonic mesh at a value of 0.684. The difference between the speed index
is only 0.3%, however, the amplitudes of the pit ching angles and plunging displacements are
dissimilar. This difference is due mainly to the difference between the pressure distributions
observed in figure (4-20) between the two grids. The disparate pressure plots can lead to
differences to both the lift and moment coefficients, causing a slightly different aeroelastic
response. This test, demonstrates the importance of mesh quality. Both grids were able
to predict an accurate flutter point, however, the finer mesh was able to provide more
accurate displacements.
64
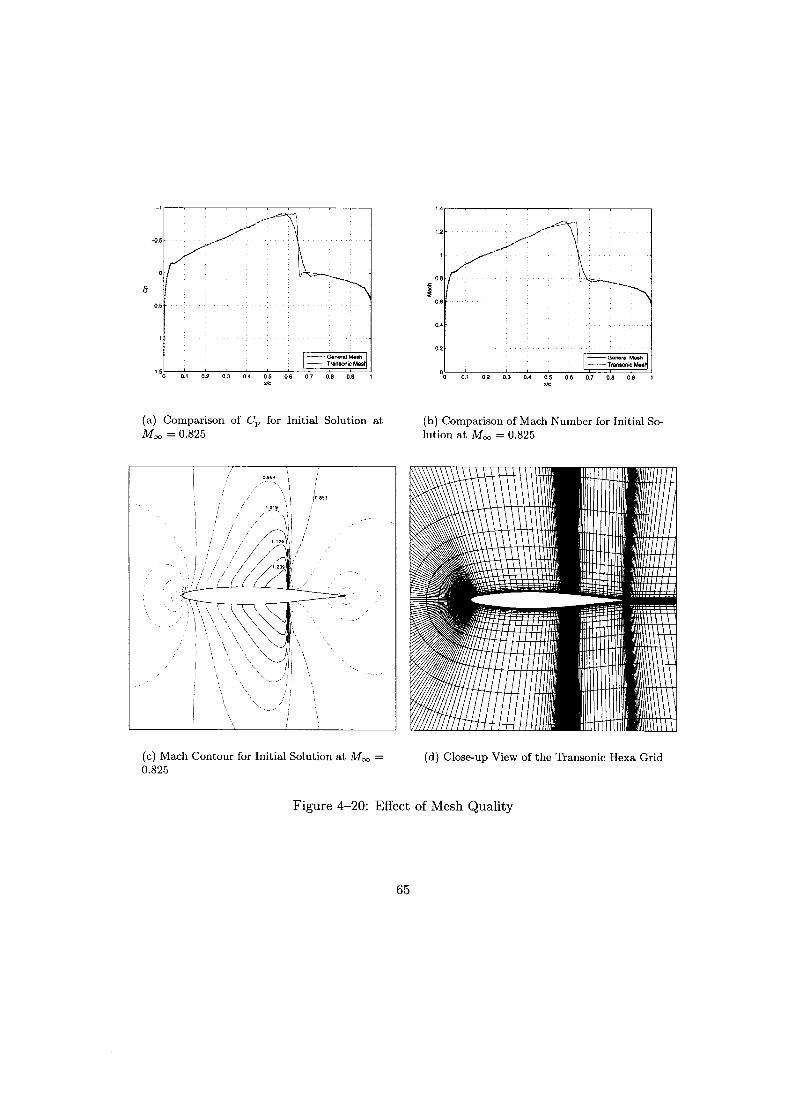
-lr--~-~-~~-~-~-r--~-~---,
o .•
1.50 0.1 0.2 0.3 0.4 0.5 0.6 0.7 >le
(a) Comparison of Cp for Initial Solution at Moo = 0.825
(c) Mach Contour for Initial Solution at Moo = 0.825
o .•
0.2
l _._ .... ~=:::~ 0~0-~0.1~~0~.2~0~.3~~0.~.~0~ .• -706~~0~.7==O~.8~~0.~.~
>Je
(b) Comparison of Mach Number for Initial Solution at Moo = 0.825
(d) Close-up View of the Transonic Hexa Grid
Figure 4-20: Effect of Mesh Quality
65

o.o3r----,-----,----r---~---.,__--__,
~ 0.02
« ~ ~ ." 0.01 5i
i 0
J .....
.~ : : : : ~ -0.01
f. V V V
-0.02
-o.030~---:'0.':-2 ------'0.4---0...1..6:----0=-'-.8----'-----'1.2
Tme(a)
Figure 4-21: Neutral Stable Response with Transonic Mesh (Moo = 0.825, VI = 0.684)
O.03.-----r-----,----r---~---.,__--__,
0.02
~ ~
A ~ ." 0.01 5i
i J '" ~ .O! Q.
o t--.. -.-.-........
-0.01 ..
V V V -0.02
-0.03l...----'------'----'---------'-----'-----' o 0.2 0.4 0.6 0.8 1.2
Tme(s)
Figure 4-22: Divergent Response with Transonic Mesh(Moo = 0.825, VI = 0.70)
66
4.4.5 Effect of Coupling Time Step
To achieve proper temporal resolution, a temporal convergence study is presented in
this subsection. The time step is determined by at = w~~N' where N is the number of time
steps per period. Figure (4-23) and (4-24), show the effect of N on the response of airfoil
at Mao = 0.825 and a speed index VI = 0.682. As illustrated, the solution converges for
N greater than and equal to 100. The results presented in the previous subsections were
obtained with 100 time steps per period. There is no observable difference between the
solutions obtained for 100 or 400 time steps per period. However, at N = 50 the aeroelastic
response obtained is that of a damped response. A smaller N value corresponds to a larger
time step, at. A large time step introduces additional numerical damping, which has the
similar effect of having viscous damping. The overall effect is an over prediction of the
flutter point.
4.4.6 Effect of Number of Sub-Iterations
Figure 4-25 illustrates the aeroelastic response due to the number of sub-iterations.
Performing two sub-iterations per time step allows both the flow and structural solvers to
repeat the time step based on the latest data. For the case of two and three sub-iterations,
the solutions are approximately equivalent. However, for the case of a single iteration, the
aeroelastic simulation results to an unstable response. Either the flow solver or structural
solver always lags the other. The number of Newton iterations for the flow solver per
sub-iteration was kept constant for all three cases.
67

0·03rr==~~---.----.----r---"---1
I -_~:~ool --N=4001 0.02
~ 0.01
1 ot----' CI .S;
1-0.01
c
~
-0.02
-o·030L------0.~2------0.~4------0.~6------0.~6------L-----~1.2
Tlme(s)
0.01
0
-0.01
-0.02
-0.03 0 0.2
(a) Plunge Displacement
0.4 0.6 TII11II(I)
0.8
(h) Angle of Attack
1.2
Figure 4-23: Eflect of Non Aeroelastic Response (Moo = 0.825, VI = 0.682)
68

~ 0.01
1 0.005
! 0
.!!' -0.005 I!' ::> i5: -0.01
-0.015
-0.02
-0.0251 1.02 1.1 1.12 1.14 1.16 1.2
TIme(a)
(a) Plunge Displacement
-O.D15L--"----'----'---'---'----'------'.----'----''-----.J 1 1.02 1.04 1.06 1.06 1.1 1.12 1.14 1.16 1.18 1.2
Tome(a)
(h) Angle of Attack
Figure 4-24: Close-up View of the Effect of Non Aeroelastic Response (Moo = 0.825, V, = 0.682)
69

S
~
0.05rr==:::r::==:::::r::;~----'--.-----'---""'--r-~
0.04 11 _- ~ :::~ rl--3cou~~
0.03
-0.02
-0.03
-0.04
0.2 0.4 0.6 0.8 1.2 1.4 1.6 TlfM(uc)
(8) Plunging Displacement
0.01
0
-0.01
-0.02
-0.03 0 0.2 0.4 0.6 0.8 1.2 1.4 1.6
TlfM(uc)
(b) Angle of Atta.ck
Figure 4-25: Eflect of Number of Sub-Iterations per Time Step. (Moo = 0.825, VI = 0.682)
70
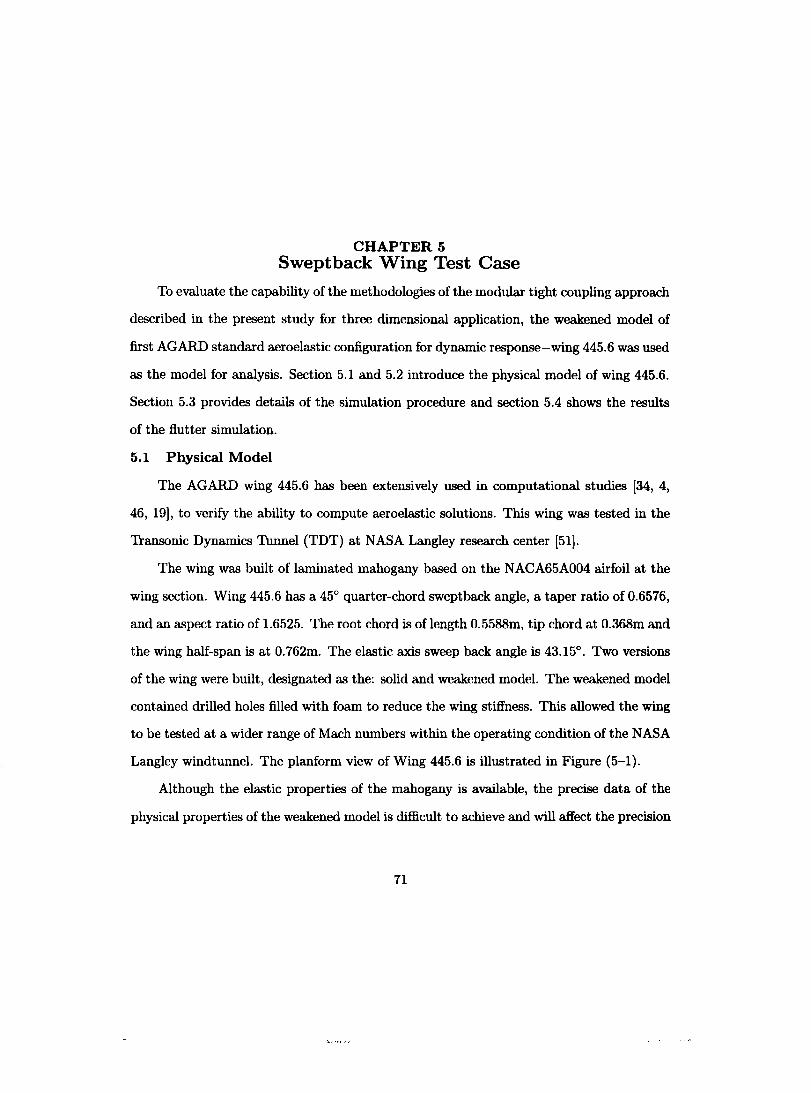
CHAPTER 5 Sweptback Wing Test Case
To evaluate the capability of the methodologies of the modlÙar tight coupling approach
described in the present study for three dimensional application, the weakened model of
first AGARD standard aeroelastic configuration for dynamic response-wing 445.6 was used
as the model for analysis. Section 5.1 and 5.2 introduce the physical model of wing 445.6.
Section 5.3 provides details of the simulation procedure and section 5.4 shows the reslÙts
of the flutter simlÙation.
5.1 Physical Model
The AGARD wing 445.6 has been extensively used in computational studies [34, 4,
46, 19], to verify the ability to compute aeroelastic solutions. This wing was tested in the
Transonic Dynamics Thnnel (TDT) at NASA Langley research center [51).
The wing was built of laminated mahogany based on the NACA65A004 airfoil at the
wing seCtiOll. Wing 445.6 has a 45° quarter-chord sweptback angle, a taper ratio of 0.6576,
and an aspect ratio of 1.6525. The root chord is of length 0.5588m, tip chord at 0.368m and
the wing half-span is at 0.762m. The elastic axis sweep back angle is 43.15°. Two versions
of the wing were built, designated as the: solid and weakened model. The weakened model
contained drilled holes filled with foam to reduce the wing stiffness. This alloWed the wing
to be tested at a wider range of Mach numbers within the operating condition of the NASA
Langley windtunnel. The planform view of Wing 445.6 is illustrated in Figure (5-1).
Although the elastic properties of the mahogany is available, the precise data of the
physical properties of the weakened model is difficlÙt to achieve and will affect the precision
71

Figure 5-1: Planform View of AGARD Wing 445.6
of the numerical simulations of the wing. Based on a 10 x 10 plate element model with
varying thickness, Spain [44] performed a finite element analysis of the weakened model with
MSC/NASTRAN. In the report, the material properties of the wing were: p = 40.33kg/m3 ,
Ex = 3.4497 x 109 N/m2, Ey = 1.03425 X 109 N/m2, G = 0.44818 X 109 N/m2, and v = 0.31,
which were carefully chosen in order to best duplicate as closely as possible to the measured
modal frequencies. The natural frequencies obtained by finite element analysis and by
experiments are listed in Table 5-1. Since both results compare well, the material properties
used in this work are based on Ref. [44].
Table 5-1: Comparison of Natural Frequencies
Mode Spain [44] Yates [51] Present FE analysis First Bending 9.6 9.6 9.61 Second Bending 48.35 50.7 56.70 First Bending 38.17 38.10 37.06 Second Torsion 91.54 98.5 89.42
72

-
Figure 5-2: Computational Domain of the Flow around AGARD Wing 445.6
5.2 Mesh Generation
5.2.1 Fluid Mesh
An unstructured tetra mesh was generated in a domain closed by the wing surface
and the far-field as shown in figure (5-2). The solution to the Euler equations use a
slip boundary condition at the wall, which states that the velo city is tangent to the wing
surface. Therefore, the solution to the Euler equations are restricted to smooth surfaces,
since presences of a discontinuous surface would severely affect the convergence properties
of the flow solver. However, the AGARD Wing 445.6 was built with a sheared-off tip.
Sillce the Euler equations are used for this work, the ullstructured mesh gellerated for this
work contains a rounded tip.
The quality of the mesh was further improved using OptiMesh. Optimesh is a mesh
adaptation code that was developed at the McGill University CFDLab. The philosophy of
mesh adaptation is to continuously modify the grid during the simulation so as to minimize
the global computational error. This approach allows the user to create a less than perfect
73

grid within a matter of hours and through the mesh adaptation proeess, grid elements
are refined in sorne regions to highlight important flow features and increased in others
where there are negligible change to the local flow field. The strategy of mesh adaptation
developed at the McGill University CFDLab has been demonstrated to be a powerful tool
to improve the quality of the mesh and consequently the convergence and accuracy of
the numerical solutions. The core of this technology is the optimization of the mesh by
equi-distributing the interpolation error over the domain in order to minimize the global
computational error.
In this work, mesh adaptation was only performed for the initial solution and not
during the unsteady simulation. Sinee the simulation is performed at a moderate subsonic
Mach number for an inviscid flow, the critical flow feature is to capture the leading edge
peak pressure accurately. Figures (5-6a-b) illustrate the final mesh generated after three
cycles of mesh adaptation, in particular, figure (5-6b) clearly illustrates that the mesh
adaptation algorithm has increased the number of points near the leading edge to provide
a better resolution of the peak pressure, while elements on the top and bottom surfaces
were coarsen sinee the surface pressure gradient in those regions are rather small. The final
mesh contains 138,620 nodes and 686,059 elements.
In Ullsteady calculation, the mesh deforming algorithm is employed to maintain a
smooth mesh. Figure (5-4) illustrates the continuous surface mesh with no irregularities
before and after surface deflection.
5.2.2 Structural Mesh
The structural wing model is represented by a thin plate, limited by the leading and
trailing edge points of the stream-wise wing sections at the root and wing tip. The model
uses 12 nodes along the stream-wise direction and 20 in the span-wise direction, to produee
a total of 240 nodes. The nodes are equally distributed in both directions. Figure (5-5)
74
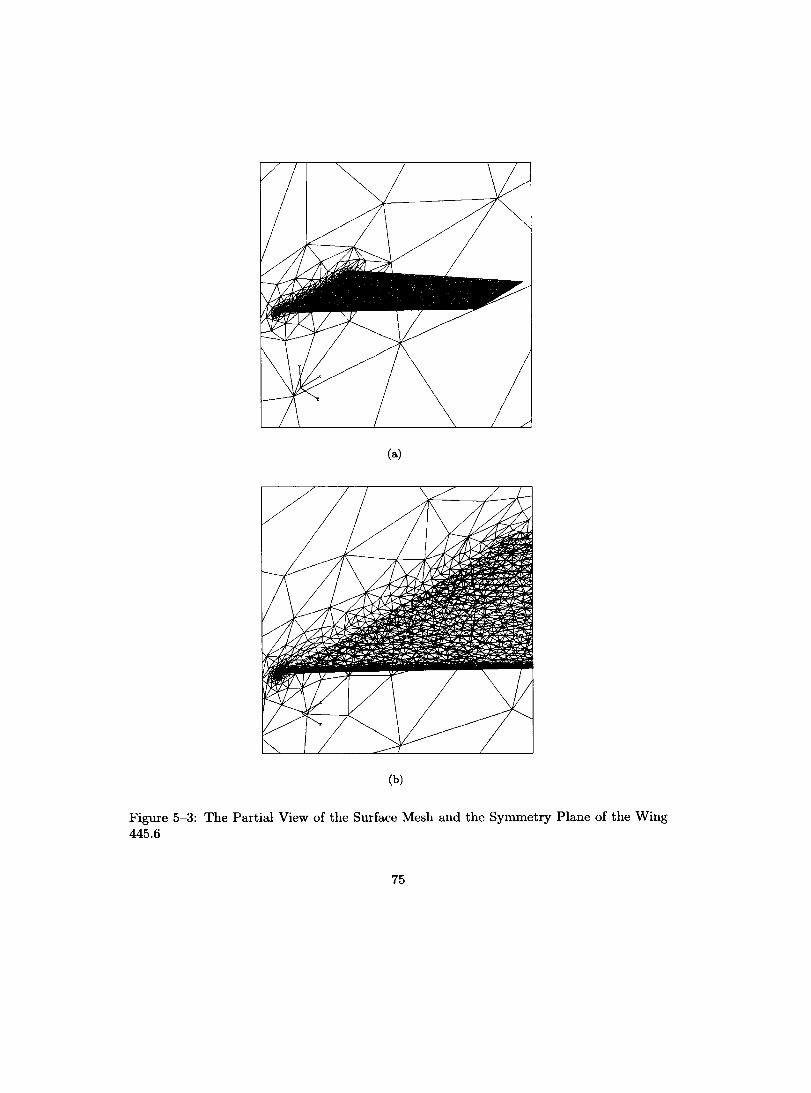
(a)
(h)
Figure 5-3: The Partial View of the Surface Mesh and the Symmetry Plane of the Wing 445.6
75
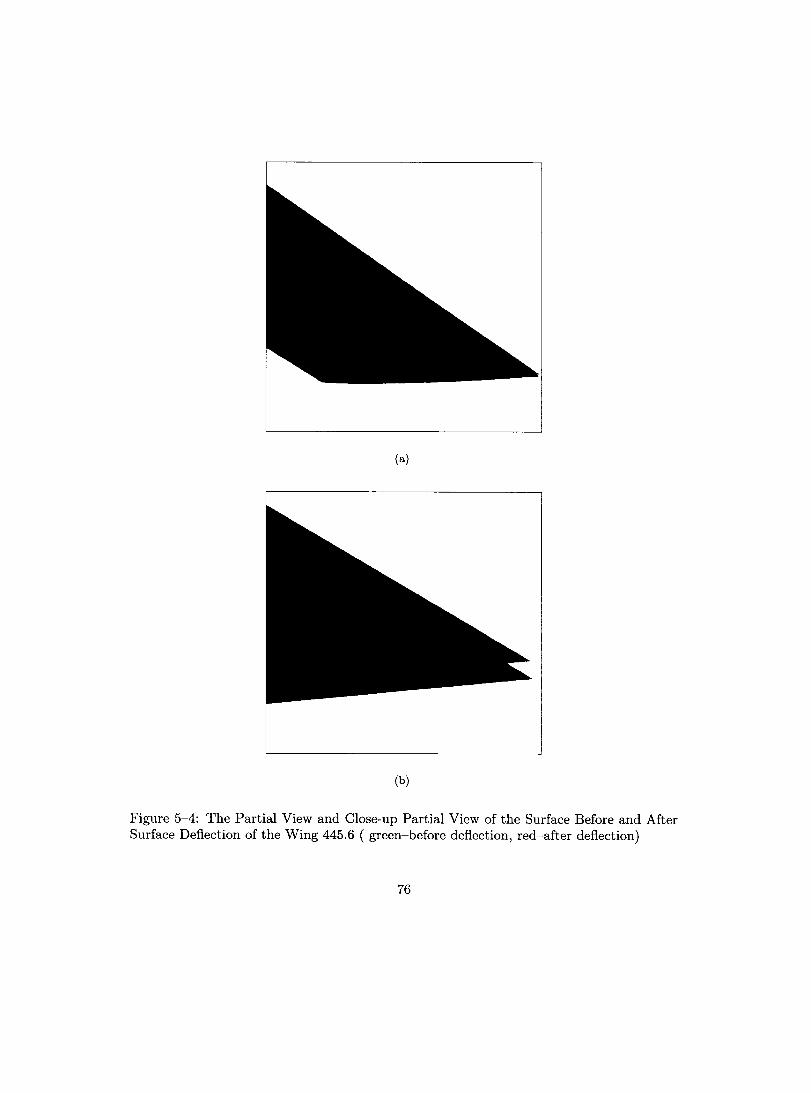
(a)
(b)
Figure 5-4: The Partial View and Close-up Partial View of the Surface Before and After Surface Defiection of the Wing 445.6 ( green-before defiection, red-after deflection)
76

~~ ~~ ~ ~
~ ~~~ '0 f\
f' rof.-
IS.:\~
~ R f' ~
~~~ ""- ~
"\
"< ~ ~
Figure 5-5: The Structural Mesh of Finite Element Model of Wing 445.6
illustrates the finite element structural mesh. The nodes form a triangular element and
are represented in MSC/NASTRAN as CTRIA3 trilateral elements. CTRIA3 allows for
variable thickness elements, by enabling the user to represent the local thickness of the
airfoil section at the structural nodes. The natural frequencies of the structural model
were computed based on the properties of the AGARD weakened Wing 445.6. The modes
of vibration are shown in figure (5-6) and (5-7), where the variational bending and torsional
modes have been identified by plotting the deflection of the wing. These deflections agree
well with the results published in [51].
5.3 Numerical Setup
In the present study, the flutter point at Mach llumber 0.499 is evaluated by coupling
the flow sol ver and the transient response analysis of the structure in an implicit approach.
The procedure to perform the aeroelastic analysis at this Mach number is as following,
77
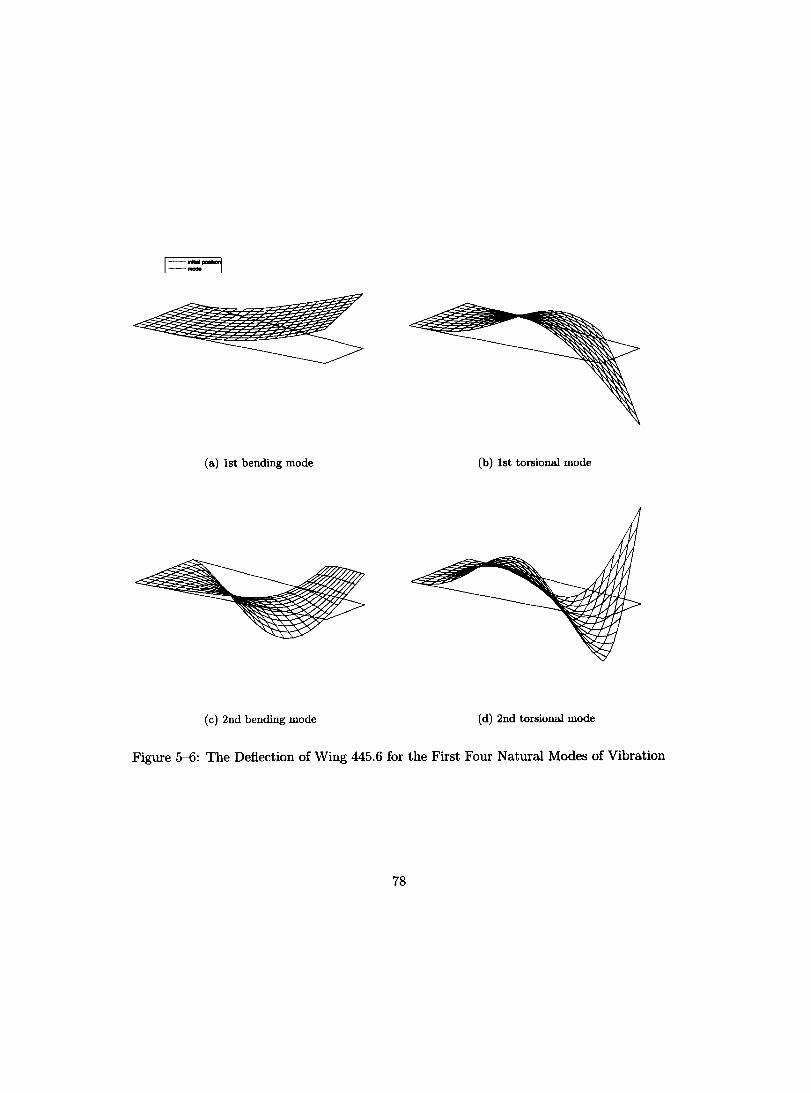
1-:"'4
(a) lst bending mode (b) lst torsional mode
( c) 2nd bending mode (d) 2nd torsional mode
Figure 5-6: The Deflection of Wing 445.6 for the First Four Natural Modes of Vibration
78

(a) lst bending mode (b) lst torsional mode
( c) 2nd bending mode ( d) 2nd torsional mode
Figure 5-7: The Contour of Deflection of Wing 445.6 for the First Four Natural Modes of Vibration
79
1. Obtain the steady-state solution by running flow solver at a freestream Mach number
0.499, temperature Too and pressure POO.
2. Impose a suit able impulse force "dead force" on the mid-chord point of the wing tip
to excite the natural modes of the wing.
3. Solve the flow equations and structural equations simultaneously for several time
steps and observe the displacement of the leading edge and trailing edge of the tip
section. After several time steps, a time history graph of the displacements will
illustrate either a stable, neutrally stable, or unstable response.
4. Keeping Moo and temperature Too constant, vary the free-stream pressure Poo, and
repeat steps 1 '"" 3 until a neutrally stable response is attained.
The following are the flight conditions used for the aeroelastic simulation. The struc
tural properties are based on the AGARD weakened model.
Il = 33.465, mass ratio, Pwing Vwing / Pair V cone,
Wu = 239.83rad/ sec, natural circular frequency of the first uncoupled torsion mode,
Uoo = 172.456,
pwing = 418.20kg/m3, density of wing,
Pair = 0.4277kg/m3, density of free-stream air (pressure 36485.1Pa),
Vwing = 0.0044531m3, volume of wing,
Vair = O.13054m3 , volume of a truncated right cone enclosing wing,
7rh 2 . 2 = ï2(croot + c,.ootttp + Ctip),
80
5.4 Results
5.4.1 Initial solution
The initial solution was obtained using a first-order artificial viscosity (AV) scheme.
The flow solver was initially launched with an AV coefficient of fI = 5, f2 = 0, where fI is
the AV coefficient for the first-order AV tenn and f2 corresponds to the second-order AV
term and a CFL number of 500. The simulation is then restarted using the current final
solution with a smaller AV coefficient and CFL number. This process is repeated until the
lowest AV coefficient that provides a numerically converged solution is achieved. Artificial
viscosity is required in numerical analysis to construct a stable scheme that will guarantee
convergence. However, if the contribution from AV is too large, it will have a negative
impact on the quality of the solution. Therefore, the contribution from AV should be the
lowest possible to achieve a converged solution.
In this work, the final simulation was obtained with an AV coefficient of 0.07 at a CFL
of 20. Figure (5-8a) illustrates the convergence of the residual. The spikes indicate that
the AV coefficient has been lowered. The residual usually increases when the coefficient
is lowered but will eventually reduce. The last spike in the residual corresponds to the
final computation with the lowest AV coefficient. This simulation required several hundred
iterations to achieve a near machine zero convergence.
Figures (5-8b-d) illustrate the Cp distribution along the stream-wise section at dif
ferent span-wise locations. A kink in the pressure distribution exists at the leading edge
because of the geometry feature of airfoil NACA65 series [32]. Near the trailing edge, oscil
lations appear in the pressure distribution and this is due mainly to the coarseness of the
grid. A finer grid would certainly provide a smoother pressure profile, however, the total
computational cast of the aeroelastic simulation would increase drastically.
81

,o~ r--~--~-~--~--~-----'
,o~
,o~
10.120:-----"'=-----;!,OO;;----::''''=----:200::;:---''''=------:!300 _.\op
(a) Residual History
o.,
-o.,
-0.3
-0.4
-o .•
(c) Cp distribution at z = 0.4
o.,
-o.,
-0.3
-0.4
-o .•
(b) Cp distribution at z = 0.2
o.,
-o.,
-0.2
-0.3
-0.4
-o .•
(d) Cp distribution at z = 0.6
Figure 5-8: Residual History and Cp distribution at different spanwise location for Flow around AGARD Wing 445.6 at Moo = 0.499
82
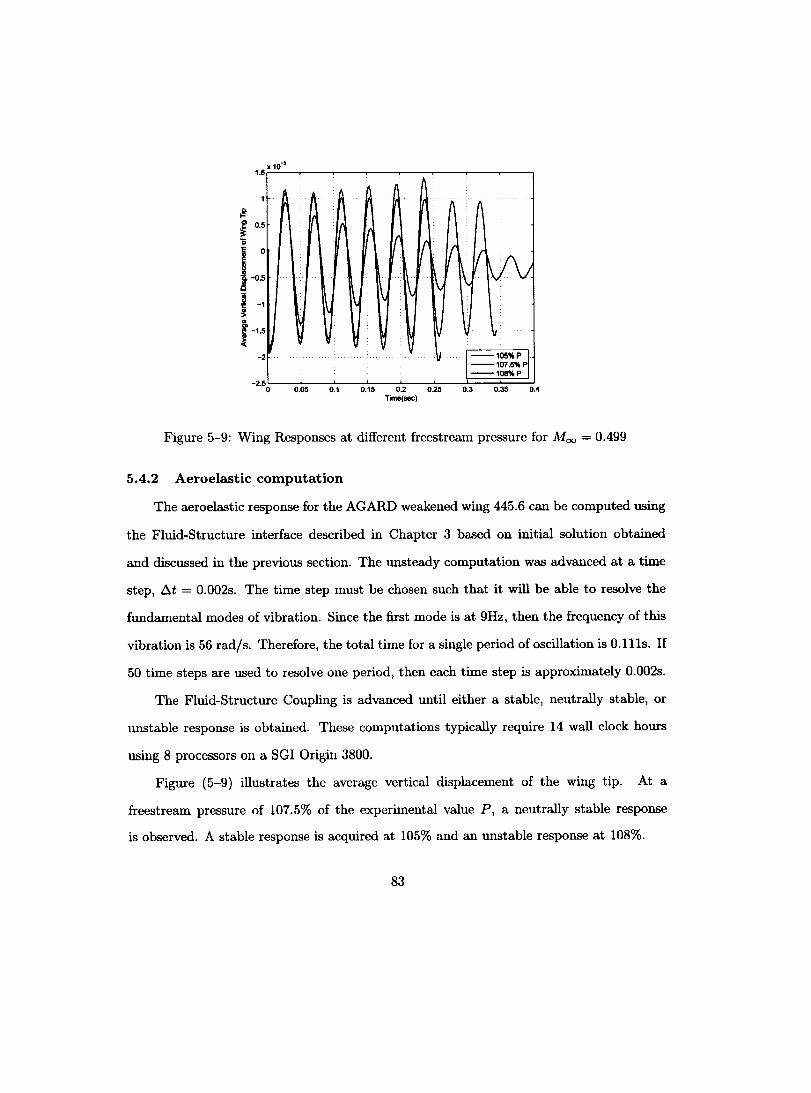
X 10-3
1.5r-'---r-----r-----,---..-----r------r----.------,
~ l 0.5
ë 1 0
i5. -0.5 i!! ~ -1 ~
f -1.5
< -2
~
0.15
fi fi.
(1
1\ 'f" f ,\ 'f V\J 1"
IV V \t
\1 l-l05%P pl --107.5%P --l08%P
0.2 0.25 0.3 0.35 0.4 Time(sec)
Figure 5-9: Wing Responses at difIerent freestream pressure for Mao = 0.499
5.4.2 Aeroelastic computation
The aeroelastic response for the AGARD weakened wing 445.6 can be computed using
the Fluid-Structure interface described in Chapter 3 based on initial solution obtained
and discussed in the previous section. The unsteady computation was advanced at a time
step, Ât = 0.002s. The time step must be chosen such that it will be able to resolve the
fundamental modes of vibration. Since the first mode is at 9Hz, then the frequency of this
vibration is 56 rad/s. Therefore, the total time for a single period of oscillation is 0.111s. If
50 time steps are used to resolve one period, then each time step is approximately 0.002s.
The Fluid-Structure Coupling is advanced until either a stable, neutrally stable, or
wlStable response is obtained. These computations typically require 14 wall dock hours
using 8 processors on a SGI Origin 3800.
Figure (5-9) illustrates the average vertical displacement of the wing tip. At a
freestream pressure of 107.5% of the experimental value P, a neutrally stable response
is observed. A stable response is acquired at 105% and an unstable response at 108%.
83

x ID·' 1.5r'-"'--,--,...-----.----,-----,,----.-----,
~ l 0.5
"ë
I~ ~ -1 ~
f -1.5
< -2
-2.5~-_=_=;__r-:':__~_7:_:_-_:'::_---::-'~===i::=:=..J o 0.05 0.1 0.15 0.2 0.25 0.3 0.35 TIIII8(NC)
Figure 5-10: Wing Responses with difIerent coupling instance for Moo 107.5%P
5.4.3 Effects of Coupling
0.499, Poo
As in the Isogai case, the number of coupling (or sub-iterations) per time step have an
efIect on the aeroelastic computation. Figure (5-10) illustrates that if a single sub-iteration
is performed the solution diverges. If a smaller time step is employed, then conceivably
a single sub-iteration would be sufficient. However, this would render the computation
intractable. Therefore, it is more desirable to use a larger time step with two sub-iterations
per time step.
5.4.4 Effect of Artificial Viscosity
As discussed earlier, a low AV coefficient is desirable. From figure (5-11), three aeroe
lastic simulations are performed at various AV coefficients for the 107.5% freestream pres
sure case. The reference computation is based on an AV coefficient of 0.07. At a higher
coefficient of 0.075, a stable response is obtained. A larger AV coefficient, indicates a larger
amount of numerical damping is present in the flow solver, thus a stable response would
84

x 10-' 2r.===~~~--~--~----~--~--1
::::::~::I 1.5 --8v:0.0151
Q. n F
A A ~ ~ ~ ~ 1 r ~ ~ :e "5
i 0.5
0
~ -0.5 ~
f -1 oC
-1.5 ~ ~ ~ ~ -1'1 ~ V \r ~ \
-2 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35
Tirne(aac)
Figure 5-11: Wing Responses with different artificial viscosity for M 00
107.5%P 0.499, Poo
be observed for the same test case where a neutrally stable response was observed for a
smaller AV coefficient.
However, for the case, where the AV coefficient was 0.068, an unstable response was
attained. This indicates that a neutrally stable response would be observed at a lower
freestream pressure.
85

CHAPTER6 Conclusions
A modular fiuid-structure tightly coupled aeroelastic solver based on a 3D Euler or
Navier-Stokes solver, FENSAP, and structural solvers, in-house code for wing typical sec-
tion and finite element structural analysis package-MSCjNASTRAN-for wing, were de
veloped to perform the fiutter simulation for a typical wing section and a wing. The first
aeroelastic solver predicted the fiutter boundary for subsonic and transonic fiow around a
typical wing section. The movement of shock waves on the wall boundary, the damping
and divergent self-excited oscillation were captured, and the transonic dip was observed.
For the 3D wing, the fiutter point at Mach number 0.499 and the damping and divergent
response were predicted. In both cases the results agree well with previous numerical or
experimental results.
The Modular approach for fiuid-structure interaction simulation provides the user the
flexibility to employ available structural or fluid solvers. The Fluid-Structure Interface
(FSI) developed in this work provides the ability to transfer loads and displacements be-
tween the fiuid and structural grids conservatively. The FSI is based on a node-to-element
mapping that allows the method to transfer loads and displacements from a 3D fiuid grid
to a low fidelity structural grid such as a fiat plate or even a beam.
Computation of accurate aeroelastic responses requires a detail analysis to the follow-
ing four aspects. First, the magnitude of the artificial viscosity term employed to stabilize
the numerical Euler equations must be low enough as not to affect the quality of the so-
lution. Results have shown that small changes to the artificial viscosity coefficient can
alter the aeroelastic response from neutrally stable to unstable. Secondly, to ensure proper
86
temporal resolution, time steps must be chosen such that the aeroelastic solution converges
to a periodic steady state solution as the time step is reduced.
Third, grid quality has a major impact on aeroelastic solutions. For the transonic test
case, the accurate capture of the shock wave, provides for better lift and most importantly
moment coefficients. Results have shown that grids with a higher resolution in the vicinity
of the shock wave provides more accurate pit ching angle and plunging displacement values.
For the AGARD test case at Mach 0.499, a mesh adaptation tool was used to improve
on the grid quality before aeroelastic simulation was performed. The accurate capture
of the leading edge peak pressure is of paramount importance to predicting the flutter
point. Accurate pressure distribution provides for an accurate representation of the moment
coefficient which has a large impact on aeroelastic cases.
Lastly, employing at least two sub-iterations per time step, allows for larger time steps
and thus a reduction in the total computational cost. The approach drastically reduces
lagging of either the fluid or structural solvers which is a common problem if OlÙy a single
iteratioll is perfonned per time step.
6.1 Future Work
The Fluid-Structure Interface presented in this work has established the framework
to couple various different fluid and structural solvers. The results presented in this work,
testifies to the versatility of the approach. Future work based on this framework can take
the following direction:
1. A natural next stage is the accurate prediction of aeroelastic response for three
dimensional transonic viscous flows.
2. Apart from computing aeroelastic solutions, the future direction should involve the
design of an aircraft wing or rotorcraft blade to tailor the aeroelastic response. Wing
flutter and buffet reduces the lift cycle of the structure due to fatigue. Aeroelastic
87

design that minimizes fatigue will have a large impact on the total operating cost of
aircrafts.
88
References
[1] J. J. Alonso and A. Jameson. F\ùly-implicit time-marching aeroelastic solution. AIAA paper 94-0056, 32nd AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, January 1994.
[2] K. Appa. Finite-surface. AIAA Journal, 26(5):495-496, 1989.
[3] G. S. Baruzzi, W. G. Habashi, J. G. Guevremont, and M. M. Hafez. A second order method for the finite element solution of the euler and navier-stokes equations. International Journal for Numerical Methods in Engineering, 20, 1995.
[4] J. T. Batina. Unsteady euler algorithm with unstructured dynamic mesh for complexaircraft aeroelastic analysis. AIAA paper 89-1189, 1989.
[5] O. A. Bauchau and J. U. Ahmad. Advanced cfd and csd methods for multidisciplinary applications in rotorcraft problems. AIAA paper 96-4151, July 1996.
[6] O. O. Bendiksen. A new approach to computational aeroelasticity. AIAA paper 91-0939, APRIL 1991.
[7] R. M. Bennet, J. T. Batina, and H. Cunningham. Wing-flutter calculations with the cap-tsd unsteady transonic small-disturbance program. Jouranl of Aircraft, 26(9), 1989.
[8] S. A. Brown. Displacement extrapolation for cfd+csm aeroelastic analysis. AIAA paper 97-1090, 1997.
[9] P. C. Chen and L. R. Hill. A three-dimensional boundary elemen method for cfd/ csd grid interfacing. AIAA paper 99-1213, 1999.
[10] R. R. Craig. Structural Dynamics.
[11] S. S. Davis. Naca64aOlO (nasa ames model) oscillatory pitching. AGARD Report 702, 1982.
[12] E. H. Dowell(Editor), R. Clark, D. Cox, H. C. Curtiss Jr., J. W Edwards, K. C. Hall, D. A. Peter, R. Scanlan, E. Simiu, F. Sisto, and T. W. Strganac. A Modern Course in Aeroelasticity (Fourth Revised and Enlarged Edition). Kluwer Academic Publishers, Dordrecht, Netherlands, 2004.
89

90
[13] J. W. Edwards, R. M. Bennet, W. Whitlow Jr., and D. A. Seidel. Time-marching transonic flutter solutions including angle-of-attack effects. Jouranl of Airerajt, 20(11), 1983.
[14] R. E.Gordier and R. B. Melville. Transonic flutter simulations using an implicit aeroelastic solver pages. Jouranl of Airerajt, 37(5), 2000.
[15] L. E. Erikson. Generation of boundary-conforming grids around wing-body configuration using transfinite interpolation. AIAA Journal, 20(10):1313-1320, 1982.
[16] L.E. Eriksson. Generation of boundary-conformation grids around wing-body configurations using transfinite interpolation. AIAA Journa~ 20(10):1313-1320, 1982.
[17] M. Farhangnia and G. P. Guruswamy. Transonic buffer associated aeroelasticity of a supecritical wing. AIAA paper 96-0286, 1996.
[18] C. Farhat, M. Lesoine, and N. Maman. Mixed explicitjimplicit time integration of coupled aeroelastic problem: Three-field formation, geometric conservation and distribution solution. International Journal for Numerical Methods in Engineering, 21:807-835, 1995.
[19] R. E. Gordnier and R. B. Melville. Transonic flutter simulation using an implicit aeroelastic solver. Jouranl of Airerajt, 37(5), 2000.
[20] G. P. Guruswamy. Unsteady aerodynamic and aeroelastic calculations for wings using euler equations. AIAA Journal, 28(3):461-469, 1990.
[21] G. P. Guruswamy. Vortical fiow computations on swept flexible wings using navierstokes equations. AIAA Journal, 28(12):2077-2084, December 1990.
[22] G. P. Guruswamy. Coupled finite-differencejfinite-element approach for wing-body aeroelasticity. AIAA paper 92-4680, September 1992.
[23] G. P. Guruswamy. A review of numerical fiuidjstructures interface methods for computations using high-fidelity equations. Computers and Structures, 80:31-41, 2002.
[24] G. P. Guruswamyand C. Byun. Fluid-structural interactions using navier-stokes flow equations coupled with shell finite element structures. AIAA paper 93-3087, July 1993.
[25] G. P. Guruswamy and T.Y.Yang. Aeroelastic time-response analysis of thin airfoils by transonic code Itran2.
[26] R. L. Harder and R. N. Desmarais. Interpolation using surface curves. AIAA Journal, 9(2):189-191, 1972.
91
[27) D. G. Holmes and H. A. Chuang. 2d linearized harmonie euler flow analysis for flutter and forced response. Technieal report, Unsteady Aerodynamics, Aeroacoutics and Aeroelasticity of Turbomachines, and Propellers (6th Int. Symp.on), New York, 1993.
[28) K. Isogai. On the transonic-dip mechanism of flutter of a awept wing. AIAA Journal, 17(7):793-795, 1979.
[29) K. Isogai. Transonic dip mechanism of flutter of a awept wing:part ii. AIAA Journal, 19(9):1240-1242, 1981.
[30) K. A. Kousen. Nonlinear Phenomena in Computational Transonic Aeroelasticity. PhD thesis, Princeton University, Dept. of Mechanical and Aerospace Engineering, January 1989.
[31) H. G. Kussner. A comparison of methods used in flutter research. A GARD Report 592, Aug. 1972. Supplement, AGARD Manual of Aeroelasticity.
[32) C. Lepage. A Tight Two- Way Fluid-Structure Coupling for Aeroelastic Computations in the Time Domain. PhD thesis, Concordia University, Dept. of Mechanical and Industrial Engineering, July 2004.
[33) C. Y. Lepage and W. G. Habashi. Fluid-structure interactions using the ale formulation. AIAA paper 99-0660, 37th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, Jan 1999.
[341 F. Liu, J. Cai, and y. Zhu. Calculation of wing flutter by a coupled fluid-structure method. Jouranl of Aircrajt, 38(2), 2001.
[35) S. Mittal and T. E. Tezduyar. A finite element study of incompressible flows past oscillating cylinder and airfoil. IJNMF 15-1073, 1992.
[36) M. Petyt. Introduction to Finite Element Vibration Aanalysis. Cambridge University Press, Cambridge, 1990.
[37) B. A. Robinson, J. T. Batina, and H. T. Y. Yang. Aeroelastic analysis of wing using the euler equation with a deforming mesh. Jouranl of Aircrajt, 28(11), 1991.
[38) D. M. Schuster, J. Vadyak, and E. Atta. Static aeroelastic analysis of fighter aircraft using a three-dimensional navier-stokes algorithm. Jouranl of Aircrajt, 27(9), 1990.
[39) J. M. Seigel, V. Parthasarathy, G. M. Kingsley, P. J. Dionne, V. J. Harrand, and J. J. LukerS. Application of a multi-disciplinary computing environment (mdice) for loosely coupled fluid-structural analysis,. AIAA paper 98-4865, 1998.
[40] G. Sitton. MSCjNastran Basic Dynamic Analysis User's Guide Vol 1. The MacNelSchwendler Corporation, 1997.

92
[41] M. J. Smith. Acceration techniques for an aeroelastic euler method for a hovering rotor. Jouranl of Aireraft, 33(2), 1996.
[42] M. J. Smith. Evalution of computational algorithms suit able for fluid-structure interaction. Jouranl of Aireraft, 37(2), 2000.
[43] M. J. Smith, D. H. Hodges, C. E. S. Cesnik, and K. J. Kenneth. An evaluation of computational algorithms to interface between cfd and csd methodologies. AIAA Paper 96-1400, AIAA/ ASME/ ASCE/ AHS/ ASC Structures, Structural Dynamics and Materials Conference and Exhibit,37th, Salt Lake City, UT, April 1996.
[44] C. V. SPain. Development of nastran finite element and aeroelastic models of agard standard configuration i - wing 445.6. InternaI Report, Lockheed Martin Engineering and Sciences, 2000(draft).
[45] J. L. Steger. Calculation of transonie aileron buzz. AIAA Journal, 18(3):249-255, 1980.
[46] J. T.Batina. Unsteady transonie algrithm improvements for realistic aircraft application. AIAA paper 88-0105, Jan. 1988.
[471 P. D. Thomas and C. K. Lombard. Geometrie conservation law and its application to flow computation on moving grids. AIAA Journal, 17(10):1030-1037, Oct. 1979.
[481 G. Tzong, H. H. Chen, K. C. Chang, T. Wu, and T. Cebeci. A general method for calculating aero-structure interaction on aircraft configurations. AIAA paper 96-3982, 1996.
[49] K. Willcox and J. Peraire. Aeroelastic computations in the time domain using unstructured meshes. International Journal for Numerical Methods in Engineering, 40:2413-2431, 1997.
[50] A. Wong, H. Tsai, J. Cai, Y. Zhu, and F. Liu. Unsteady flow calculation with a multibolck moving mesh algorithm. AIAA paper 2000-1002,2000.
[51] E. C. Jr. Yates, N. S. Land, and Foughner J. T. Jr. Measured and calculate subsonic and transonic flutter characteristics of a 45 sweptback wing plantform in air and in freon-12 in the langley transonic dynamics tunnel. AGARD Report TN D-1616, 1963.


















