
Finite Word Length Effects and Quantisation Noise
24
Professors A G Constantinides & L R Arnaut Finite Word Length Effects Finite Word Length Effects and Quantisation Noise and Quantisation Noise 1
Transcript of Finite Word Length Effects and Quantisation Noise

Professors A G Constantinides & L R Arnaut
Finite Word Length Effects Finite Word Length Effects and Quantisation Noiseand Quantisation Noise
1

Professors A G Constantinides & L R Arnaut
Finite Word Length EffectsFinite Word Length Effects• Finite register lengths and A/D converters cause errors at different
levels:(i) input:
Input quantisation
(ii) system: Coefficient (= multiplier) quantisation
(iii) output: Operation (products) truncated or rounded due to finite machine word length
2

Professors A G Constantinides & L R Arnaut
Input QuantisationInput Quantisation• Discretisation of time (sampling) vs. signal values
– For each sample: search nearest level & round off actual value to this level (S&H) ⇒ finite precision digitized value
– Most values cannot be represented exactly⇒ quantisation error e(k)
– Rounded value can be above or below actual value: random bounded fluctuation of quantisation error:⇒ conceived as quantisation noise
t
ei(t),
Q
eo(t)
3)(tnq
)()()( tntete qio +=
sampling
quan
tisat
ion

Professors A G Constantinides & L R Arnaut
• Quantisation error e for quantisation step Q:
• Nearest-level rounding ⇒• Q = least significant bit (determines precision, resolution)• Quantisation is irreversible process (⇒ loss of information)
↔ sampling above Nyquist rate4
QuantisationQuantisation Error (Linear)Error (Linear)
Q
Output
Input
2)(
2QkeQ
≤≤−
)(kei
)(keo Linear mid-treadquantiser
ei(k) to stay within dynamic range R to avoid clipping ofeo(k) (overflow error)
R
Professors A G Constantinides & L R Arnaut
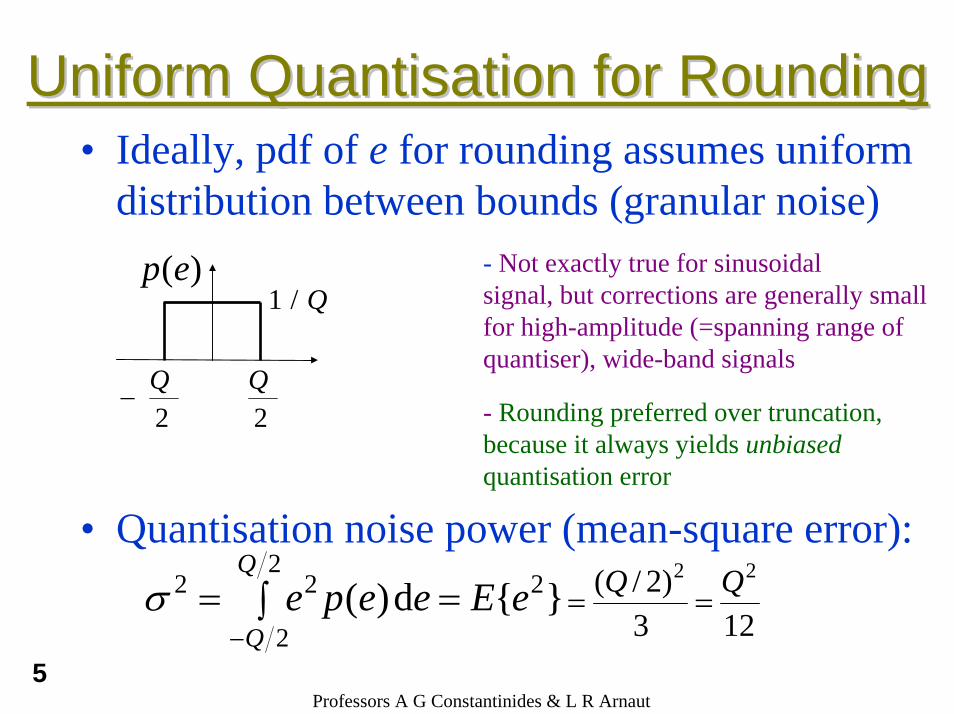
UniformUniform QuantisationQuantisation for Roundingfor Rounding• Ideally, pdf of e for rounding assumes uniform
distribution between bounds (granular noise)- Not exactly true for sinusoidal signal, but corrections are generally small for high-amplitude (=spanning range ofquantiser), wide-band signals
- Rounding preferred over truncation, because it always yields unbiasedquantisation error
• Quantisation noise power (mean-square error):
5
2Q−
2Q
Q/1
∫ ==−
2
2
222 }{d)(Q
QeEeepeσ
123)2/( 22 QQ==
)(ep
Professors A G Constantinides & L R Arnaut
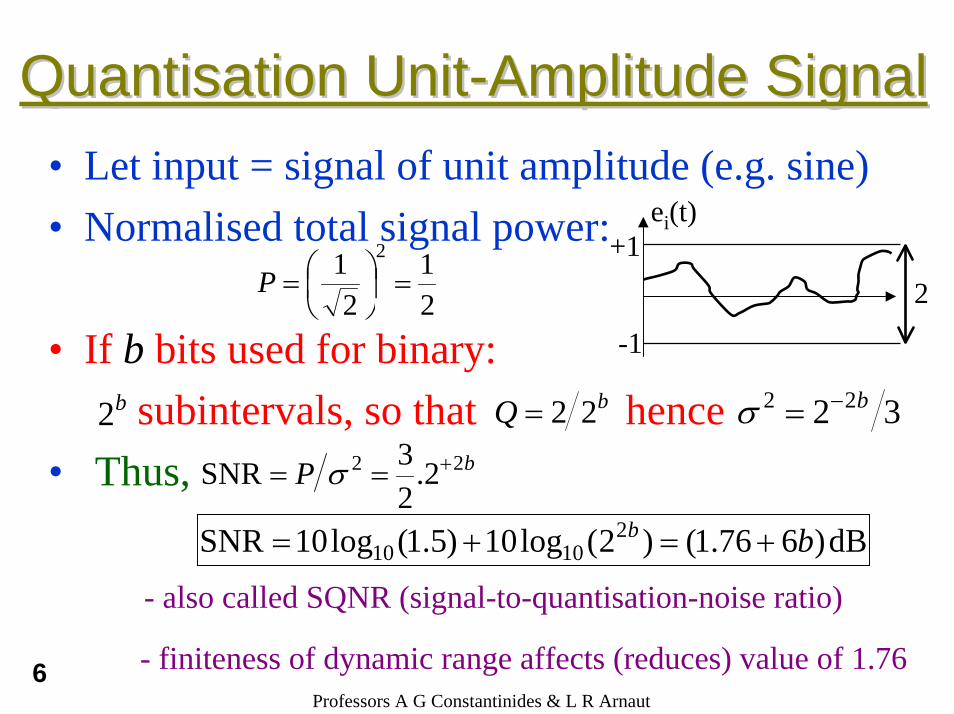
QuantisationQuantisation UnitUnit--Amplitude SignalAmplitude Signal• Let input = signal of unit amplitude (e.g. sine) • Normalised total signal power:
• If b bits used for binary: subintervals, so that hence
• Thus,
- also called SQNR (signal-to-quantisation-noise ratio)
- finiteness of dynamic range affects (reduces) value of 1.766
bQ 22= 32 22 b−=σbP 22 2.
23SNR +== σ
+1
-1
ei(t)
2
b2
21
21 2
=⎟⎠⎞
⎜⎝⎛=P
dB)676.1()2(log10)5.1(log10SNR 21010 bb +=+=
Professors A G Constantinides & L R Arnaut
ApplicationsApplications
7
• DECT (speech)• One requires: SNR > 25 dB, i.e., 4 bits• In practice:
– extra 30 dB of dynamic range required – largest signal for nonsinusoidal signal corresponds to 0 dB, not -3 dB
• Thus, -30-25=-55 dB below maximum; requires minimum 9 bit-encoding
• HiFi (e.g., CD/DVD, in-flight data streaming): • Min. 12 bit-encoding (SNR = 78.3 dB); typ. 16-bit (96 dB) because of
imperfect A/D devices
• In practice: using companders (compressor+expander):• Pre-emphasis of input signal before quantisation• Takes advantage of nonuniform probability of analogue values• Result: nonuniformly quantised output signal (use small Q when signal is
small) ⇒ S-shaped (nonlinear) I/O characteristic• Noise reduction in audio: Dolby, dbx

Professors A G Constantinides & L R Arnaut
CompandersCompanders• Comparison:
– Uniform quantization, 7 bits + 1 sign bit: SNR=44 dB– Nonuniform quantisation (nonlinear transformation):
• µ-255 characteristic (US, Japan) (UNIX sound, JAVA, etc.):– Exploits logarithmic characteristic of loudness (human sound perception)– Allows for digitization of speech using only 8 bits for SNR=77dB
• A-87.6 characteristic (Europe): international convention
11,)1ln(|)|1ln()sgn()( +<<−
++
= xxxxfµ
µ
⎪⎪⎩
⎪⎪⎨
⎧
≤≤++
≤≤+=
1||/1,)ln(1
||ln1)sgn(
/1||0,)ln(1
||)sgn()(
xAAAxx
AxA
xAxxf
8
Professors A G Constantinides & L R Arnaut
Digital TelephoneDigital Telephone• Digital telephone transmission: voice
– B = 3.4 kHz (analogue)– Sampling: F = 2 B = 6.8 kHz (ideal filters)– With filter margin: 8 kHz– 8 bits/sample, 8k samples/sec ⇒ 64 kbps
9

Professors A G Constantinides & L R Arnaut
Multilevel CodingMultilevel Coding• Data transmission: Multilevel coding
– Instead of transmission of single bits: grouping bits, e.g., in pairs:
• lower symbol rate (i.e., smaller channel bandwidth) or higher bit rate, but decoding more difficult (larger quantisation error, or larger power needed)
• Illustrates the dilemma “noise vs. bandwidth (speed) vs. accuracy vs. power”
– Symbol rate (modulation rate) = 1 / duration of 1 pulse• Expressed in baud
– Bit rate = symbol rate × number of bits per symbol• Expressed in bps
– In multilevel coding: symbol rate ≠ bit rate
00
01
10
11
10

Professors A G Constantinides & L R Arnaut11
Coefficient Quantisation: Coefficient Quantisation: SecondSecond--Order SystemsOrder Systems
• Consider a simple example of finite precision of the coefficients a,b of a second order system with two complex conjugate poles :
where
• Quantisation error of coefficients affects location of poles andzeroes ⇒ imperfect frequency response
• Sensitivity of frequency response of filter to quantisation error is minimised if filter is implemented as cascade of 2nd-order filters (can be shown)
2111)( −− ++
=bzaz
zH
θρ je±
221cos211
−− +−=
zz ρθρ
2ρ=b,cos2 θρ−=a

Professors A G Constantinides & L R Arnaut
Coefficient QuantisationCoefficient Quantisation
• For
instability (oscillation) can occur fori.e., when poles of H(z) are either
• (i) both on unit circle when complex, or• (ii) one real pole outside unit circle
• Instability under the "effective pole" model is considered as follows
)1(1)( 2
21
1−− ++
=zbzb
zH
12 ⎯→⎯<b
12

Professors A G Constantinides & L R Arnaut
Effective Pole ModelEffective Pole Model• In the time domain, from :
• With , instability issue meansis indistinguishable from ,
where represents quantisation operation
)()()( zX
zYzH =
)2()1()()( 21 −−−−= nybnybnxny
12 →b[ ])2(2 −nybQ )2( −ny
[ ]⋅Q
13
Professors A G Constantinides & L R Arnaut
Effective Pole ModelEffective Pole Model• With rounding,
and are indistinguishable (for integers) if
• Hence
• With both positive and negative :
5.0)2(2 ±−nyb )2( −ny
)2(5.0)2(2 −=±− nynyb
215.0)2(
bny
−±=−
215.0)2(
bny
−±=−
2b
|b2|=1 is the effective pole for coefficient quantisation noise (oscillation)14
Professors A G Constantinides & L R Arnaut15
Dead Band Dead Band –– Limit CycleLimit Cycle• The range of integers
constitutes a set of integers that cannot be individually distinguished as separate or distinguished from asymptotic system behaviour.
• The band of integers
is known as the dead band.• In the second order system, under rounding, the
output assumes a cyclic set of values of the dead band. This is a limit cycle.
• Dead band ≠ hysteresis (no action in dead band)
215.0
b−±
⎟⎟⎠
⎞⎜⎜⎝
⎛−
+−
−22 1
5.0 ,1
5.0bb

Professors A G Constantinides & L R Arnaut
Effective Pole: OscillationsEffective Pole: Oscillations• Consider the transfer function
• If poles are complex then discrete impulse (unit sample) response sequence is
with
)1(1)( 2
21
1−− ++
=zbzb
zG
2211 −− −−= kkkk ybybxy
kh
[ ]θθ
ρ )1(sin.sin
+= khk
k
,2b=ρ ⎟⎠⎞
⎜⎝⎛−= −
2
112cos b
bθ
16

Professors A G Constantinides & L R Arnaut
Effective Pole: OscillationsEffective Pole: Oscillations
• If then the response is sinusoidal (oscillatory) with angular frequency
• Thus, product quantisation causes instability implying an “effective pole“ at .
12 =b
⎟⎠⎞⎜
⎝⎛−= −
2cos1 11 bT
ω
12 =b
17

Professors A G Constantinides & L R Arnaut
• Consider infinite precision computations for
Limit Cycle of 2Limit Cycle of 2ndnd Order System: Order System: ExampleExample
21 9.0 −− −+= kkkk yyxy
0 ;00 ; 0
100
<=≠=
=
kykx
x
k
k
-10 -5 0 5 10-10
-8
-6
-4
-2
0
2
4
6
8
10
y k-1
yk
(k=1)(k=2)
(k=3)response converges to the origin without limit
18

Professors A G Constantinides & L R Arnaut19
Limit Cycle of 2Limit Cycle of 2ndnd Order System: Order System: ExampleExample
• Now the same operation with integer precision
-10 -5 0 5 10-10
-8
-6
-4
-2
0
2
4
6
8
10 -Reponse does not converge to the origin, but assumes cyclically a set of values with nondecreasing quantisation error: the Limit Cycle
-System can only be driven out of its limit cycle only if new & sufficiently large input is applied
-Truncation (as opposed to rounding) can eliminate most limit cycles. However, trun-cation can cause biased quantisation error

Professors A G Constantinides & L R Arnaut
Output QuantisationOutput Quantisation• Linear modelling of product quantisation
modelled as
Now interested in output of multiplier
x(n) )(~ nx[ ]⋅Q
x(n)
q(n)
+ )()()(~ nqnxnx +=
20

Professors A G Constantinides & L R Arnaut
Output QuantisationOutput Quantisation• Recall: for rounding operations, q(n) is
uniformly distributed between and , where Q is the quantisation step (i.e. in a word length of b bits with sign+magnitude representation mod 2, )
• A discrete-time system with quantisation at the output of each multiplier may be considered as a multi-input linear system
2Q
−2
Q
bQ −= 2
21

Professors A G Constantinides & L R Arnaut
Output QuantisationOutput Quantisation
• Each qλ(n) contributes to output accuracy• Then
where is the impulse response of the system from th output of the multiplier to y(n).
h(n)
)()...()...( 21 nqnqnq p
{ })(nx { })(ny
∑ ⎥⎦⎤
⎢⎣⎡ ∑ −+∑ −=
=
∞
=
∞
=
p
rrrnhrqrnhrxny
1 00)().()().()(
λλλ
)(nhλλ
22
Professors A G Constantinides & L R Arnaut
Output QuantisationOutput Quantisation• Avoid output quantification error (clipping) by
avoiding overflow in output caused by q• For zero input (free running), i.e., :
where is an upper bound for
This bound is the maximum error
Hence
nnx ∀= ,0)(
∑ ∑ −≤=
∞
=
p
rrnhqny
1 0)(.ˆ)(
λλλ
λq̂ rrq , ,)( λλ ∀
2Q
∑ ⎥⎦⎤
⎢⎣⎡ ∑ −≤
=
∞
=
p
nrnhQny
1 0)(.
2)(
λλ
23
Professors A G Constantinides & L R Arnaut
Output QuantisationOutput Quantisation• However, error does not exceed unit step input:
hence
Thus, we can estimate the maximum range at the output to avoid clipping from the system parameters h(n) and quantisation level Q
∑ ∑≤∞
=
∞
=0 0)()(
n nnhnhλ
∑≤∞
=0)(.
2)(
nnhpQny (conservative)
24


















