final ppt
31
ANDROID BASED AUTOMATED WHEEL CHAIR
-
Upload
shashank-tiwari -
Category
Documents
-
view
25 -
download
0
Transcript of final ppt

ANDROID BASED AUTOMATED WHEEL CHAIR

OBJECTIVE THIS PAPER PROJECTS AN ANDROID BASED SMART AUTOMATED WHEEL CHAIR FOR HANDICAPPED /ELDERLY PEOPLE TO HELP THEM. THIS WHEEL CHAIR IS BATTERY POWERED CONTROLLING TWO D.C. MOTORS. THE CHAIR FUNCTIONS ON THE ACCELEROMETER SENSOR IN BUILT IN MODERN DAY SMART-PHONES. TILT OF THE SMARTPHONE IS GIVEN AS AN INPUT COMMAND TO THE MICROCONTROLLER VIA BLUETOOTH MODULE THE MOVEMENT OF THE D.C. MOTORS. DEPENDING ON THE DIRECTION OF TILT OF THE SMART PHONE, THE MICROCONTROLLER CONTROLS THE WHEELCHAIR DIRECTIONS. ALSO AN I.R. DETECTION SYSTEM IS UPGRADED TO DETECT THE OBSTACLE ON THE PATH OF WHEEL CHAIR AND MAKE OBJECT COLLISION MORE AVOIDABLE. THUS MAKING HANDICAPPED PERSON INDEPENDENT FOR MOVEMENT

PROBLEM DEFINITION
1) WHEEL CHAIR STABILITY IS AN ISSUE IN MOTORISED WHEELCHAIRS . THIS ISSUE CREATES A PROBLEM IN HANDLING?
2) AUTOMATIC BRAKING SYSTEM WHICH IS USED FOR STOPPING AND CONTROLLING THE WHEELCHAIR IS MISSING FROM MANY PRESENT DAY WHEELCHAIR?
3) COST EFFECTIVE WHEELCHAIR IS AN ISSUE?
4) CHARGING THE BATTERY AFTER IT GETS DISCHARGED IS AN ISSUE?

LITERARY SURVEYIN THE PAPER ON “VOICE OPERATED WHEEL CHAIR” VOICE COMMAND INPUT IS TAKEN FROM ANDROID MOBILE AND CONVERTED INTO TEXT AND THIS TEXT IS GIVEN TO THE MICROCONTROLLER VIA BLUETOOTH MODULE TO CONTROL THE OPERATION OF D.C. MOTORS.
IN THE PAPER “VOICE AND TOUCH SCREEN BASED AND SPEED CONTROL OF WHEEL CHAIR FOR PHYSICALLY CHALLENGED USING ” INPUT TO IN TWO WAYS I.E. VIA VOICE COMMAND OR TOUCH COMMAND I.E. HM 2007 IS USED AS A VOICE RECOGNITION DEVICE. INPUT METHOD IS SWITCHED THROUGH SWITCHES AND INPUT IS GIVEN BY ANY TWO METHODS . TWO D.C. MOTORS ARE USED TO PROVIDE MOTION.
IN THE PAPER “A WHEEL CHAIR STEERED THROUGH VOICE COMMANDS AND ASSISTED BY A REACTIVE FUZZY-LOGIC CONTROLLER”, VOICE COMMAND CONTROLLED AND A FUZZY LOGIC CONTROLLER IS USED ALONG WITH A SENSOR NETWORK TO AVOID COLLISION OF THE WHEEL CHAIR. FUZZY LOGIC CONTROLLER IS USED TO RECTIFY PROBLEM CAUSED DUE TO LOW VOICE COMMAND INPUT FROM THE USER.

INTRODUCTION
• This is an android based automated wheelchair that can be used by differently abled.
• It uses android based smartphones which have inbuilt axis accelerometer sensors and bluetooth wireless technology.
• The proposed concept exploits these features of the smart phones to use at as a transmitter and control device.

TRANSMITTING SECTION
• Accelerometer- the smartphone accelerometer is a semiconductor IC that measures motion and its intensity in 2 axis.

• Often accelerometers is used to present landscape or portrait views of the devices screen based on the way the device is being held.
• Bluetooth - Bluetooth present in the smartphone can be tapped using protocol stacks in the app design environment of the mobile operating system.
• Functional app-this app interfaces accelerometer to work with Bluetooth module. E.g. bluetooth pro(by develectronicx)

RECEIVING SECTION
• Microcontroller-its need involves the reception of data signals that are transmitted by the smartphone via Bluetooth module and control the working of servo and DC motors.
• The wheelchair interacts with the smartphone app by means of this Atmega 16 microprocessor via Bluetooth. –

MOTION DRIVER COMPONENTS
• DC motor- directional motor in wheelchair is provided by this motor (left-right).
• For higher weights we need DC motors of high torque.
• The DC is connected to the axle of the rear wheel and is connected to a battery through a motor driver which is being signaled by the controller.
• DC motor- for driving linear motion the type of motor generally used is a DC motor with the higher RPM, torque.
• It is connected to the rear wheels of the wheelchairs.

FLOW CHART
Transmitter(Smart phone)
Receiver (Wheelchair) Motor
driver
DC motor
Installed with microcontroller(motor control)
Bluetooth, Android
and accelerome
ter

COST ESTIMATION TABLESERIAL NO.
DESCRIPTION CATEGORY QUANTITY PRICE (Rs.)
1 ATMEGA-16 INTEGRATED CIRCUIT CHIP
ELECTRICAL 1 195
2 PRINTED CIRCUIT BOARD 6X3 INCHES (MICROCONTROLLER BOARD)
ELECTRICAL 1 250
3 6X1 PIN SPI RELIMATE HEADER
ELECTRICAL 1 100
4 3X1 PIN RELIMATE HEADER INPUTS FOR ANALOG SENSORS
ELECTRICAL 8 220
5 16 PIN HEADER TO CONNECT 16X 2 ALPHANUMERIC LCD
ELECTRICAL 1 100
6 ONBOARD L293D DRIVERS FOR MOTORS
ELECTRICAL 2 300
7 PROGRAMMABLE LEDS ELECTRICAL 4 100
8 DPDT SWITCHES( POWER & RESET)
2 50
9 3X1 PIN RELIMATE HEADER FOR RS232D COMMS
1 150
10 8 PIN BERGISTICK HEADERS FROM EACH PORT
4 200
11 BLUETOOTH MODULE HC-05
ELECTRICAL 1 450
12 MOSFET (IRF9540& IRF540)
ELECTRICAL 4 250

COST ESTIMATION TABLE
SERIAL NO.
DESCRIPTION CATEGORY QUANTITY PRICE
14 12 VOLTS RECHARGABLE BATTERY
ELECTRICAL 2 275
15 9 VOLTS BATTERY FOR MICROCONTROLLER
ELECTRICAL 1 40
16 IR SENSOR ELECTRICAL 1 140
17 24 VOLTS DC MOTOR ELECTRICAL 2 500
18 BASE FRAME 300X320 mm WOODEN PLATE
MECHANICAL 1 100
19 95 mm DIAMETER HARD PLASTIC WHEEL
MECHANICAL 2 50
20 60mm DIAMETER FREE WHEELS
MECHANICAL 2 100
21 METALLIC COVER AL LUSTRE WITH HINGE JOINT
MECHANICAL 1 300
22 BLUETOOTH WITH SENSOR APP
SMARTPHONE 1 2000

INITIAL STAGES

CURRENT PHASE

MECHANICAL STRUCTURES & DIMENSIONSTHE FOLLOWING FIGURE ILLUSTRATES THE IMPORTANT WHEELCHAIR TERMINOLOGIES THAT NEEDS TO BE CONSIDERED WHILE DESIGNING A WHEELCHAIR.

PERSONS WITH DISABILITIES ACT (1995) RECOGNISES THE RIGHTS OF INDIANS WITH DISABILITIES AND CREATES OPPORTUNITIES FOR EQUAL PARTICIPATION IN ALL GOVT. RUN INFRASTRUCTURES AND SERVICES.
THERE ARE CERTAIN STANDARDS AND GUIDELINES THAT ARE PROVIDED REGARDING THE DIMENSIONAL SPECIFICATIONS OF A WHEELCHAIR BY GOVERNMENT AGENCIES LIKE BUREAU OF INDIAN STANDARDS (BIS), CENTRAL PUBLIC WORKS DEPARTMENT (CPWD), OFFICE OF CHIEF COMMISSIONER FOR PERSONS WITH DISABILITIES (CCD) ETC. BASED ON EXTENSIVE SURVEY AND RESEARCH ON THE POPULATION OF PEOPLE WITH DISABILITIES WHO USE WHEELCHAIRS.
THE ACT DOES NOT COMMENT ON THESE DIFFERENT STANDARDS AND GUIDELINES AND DOES NOT ENDORSE ANY ONE OF THEM. SO WE’RE JUST GOING TO GO WITH BUREAU OF INDIAN STANDARDS’ RECOMMENDATIONS.

FIXED STANDARD
ACCORDING TO BIS (IS 7454 AND IS 4963) : (ALL MEASUREMENTS ARE IN MILLIMETRES)
UNOCCUPIED WIDTH = 650-720
UNOCCUPIED LENGTH = 1000-1100
HANDLE HEIGHT = 910-950
ARMREST HEIGHT = 700-740
SEAT HEIGHT = 480-510
COMBINED KNEE + TOE CLEARANCE DEPTH = 400-450

CHOSEN STANDARDFOR THE SCALED DOWN MODEL, THE DIMENSIONS WHICH WILL BE USED ARE AS FOLLOWS:
UNOCCUPIED WIDTH = 325
UNOCCUPIED LENGTH = 500
HANDLE HEIGHT = 455
ARMREST HEIGHT = 350
SEAT HEIGHT = 240
COMBINED KNEE + TOE CLEARANCE DEPTH = 200
THE BASE PLATE LENGTH = UNOCCUPIED LENGTH - (COMBINED KNEE + TOE CLEARANCE DEPTH ) = 500 - 200 = 300

DESIGN & MANUVERABILITY
THE LOCATION OF THE DRIVE WHEELS (THE WHEELS POWERED BY THE MOTOR) IN THE REAR, MIDDLE OR FRONT OF THE CHAIR HAS A DEFINITE EFFECT ON THE CHAIR’S PERFORMANCE IN DIFFERENT ENVIRONMENTS.
MANEUVERABILITY
THE POSITION OF THE DRIVE WHEELS SIGNIFICANTLY AFFECTS THE SPACE NEEDED FOR THE CHAIR TO TURN AROUND, AND THE WAY THE CHAIR MANEUVERS IN TIGHT SPACES.
MID-WHEEL AND FRONT-WHEEL DRIVES ARE LESS SENSITIVE TO PROBLEMS CAUSED BY WEIGHT DISTRIBUTION THAN REAR-WHEEL DRIVES.

MANUVERABILITYMID-WHEEL DRIVES ARE THE MOST MANEUVERABLE BECAUSE THEY HAVE THE SMALLEST 360-DEGREE TURNING CIRCUMFERENCE AND THE TIGHTEST TURNING RADIUS (20 TO 26 INCHES), MAKING THEM EXCELLENT INDOOR CHAIRS.
FRONT-WHEEL DRIVES HAVE A TURNING RADIUS OF 25 TO 28 INCHES AND A LARGER 360-DEGREE CIRCUMFERENCE THAN MID-WHEEL DRIVES. HOWEVER, THEY ACTUALLY NAVIGATE AROUND TIGHT CORNERS BETTER THAN THE OTHER TWO DRIVE SYSTEMS BECAUSE THE POSITION OF THE PIVOT POINT GIVES THEM A VERY SHORT FRONT END. BUT TURNING AROUND IN A SMALL SPACE IS TRICKY BECAUSE OF THE LONG BACK END.
REAR-WHEEL DRIVES HAVE THE LARGEST 360-DEGREE CIRCUMFERENCE AND TURNING RADIUS (30 TO 33 INCHES) OF THE THREE DRIVE SYSTEMS, MAKING THEM MORE DIFFICULT TO MANEUVER IN TIGHT SPACES.
IN ADDITION, THE FOOTRESTS ON A REAR-WHEEL DRIVE CHAIR TAKE UP MORE SPACE BECAUSE THEY’RE TYPICALLY ANGLED FORWARD AT ANYWHERE FROM 80 TO 60 DEGREES IN ORDER TO CLEAR THE LARGER FRONT CASTERS.
ON FRONT-WHEEL DRIVE CHAIRS, THERE ARE NO FRONT CASTERS TO INTERFERE WITH HAVING 90-DEGREE FOOTRESTS. WHEN THE FOOTRESTS ARE COUNTED IN THE TURNING RADIUS MEASUREMENT, THEY ADD LESS THAN AN INCH.

HANDLING OBSTACLES & INCLINES
FRONT-WHEEL DRIVES ARE OPTIMAL FOR TRAVERSING OBSTACLES SUCH AS CURBS, GRASS, GRAVEL, UNEVEN TERRAIN AND SNOW. THIS IS BECAUSE THE 14-INCH DRIVE WHEELS ARE THE FIRST WHEELS TO ENCOUNTER OBSTACLES AND THEY PULL THE REST OF THE WHEELCHAIR OVER THEM.
A REAR-WHEEL DRIVE MEANS THE DRIVE WHEELS ARE PUSHING THE FRONT CASTERS OVER OBSTACLES. BECAUSE PUSHING IS HARDER THAN PULLING, REAR-WHEEL DRIVES AREN’T QUITE AS EFFICIENT GOING OVER OBSTACLES AS FRONT-WHEEL DRIVES.

CASTER STEM DESIGNCASTER STEMS MUST BE KEPT AS VERTICAL AS POSSIBLE. CASTER STEMS THAT ARE NOT VERTICAL CAUSE A NUMBER OF PROBLEMS. IF THE STEM LEANS FORWARDS AT THE TOP THE CHAIR IS DIFFICULT TO TURN AND THE KNEES ARE LOWER WHEELING FORWARDS THAN WHEN WHEELING BACKWARDS. IF THE STEM IS LEANING BACKWARDS AT THE TOP, THE CHAIR IS DIFFICULT TO KEEP IN A STRAIGHT LINE AND THE KNEES RAISE UP HIGHER WHEN ROLLING FORWARDS. ALSO WHENEVER THE WHEELER STOPS THE CHAIR WILL ROLL BACKWARDS A LITTLE.

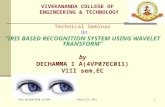
ANALYSISWHEEL CHAIR TYPES
TURNING RADIUS(Inches)
Mid wheel drive Wheel chair
20-26
Front wheel drive Wheel chair
25-28
Rear wheel drive Wheel chair
30-33
WHEEL CHAIR TYPES
Step, bump or curb that is up to 2 inches
Step, bump or curb that is up to 2.5 inches
Step, bump or curb that is up to 3.2 inches
Step, bump or curb that is up to 3.3 inches and high
Mid wheel drive Wheel chair
Yes Yes No No
Front wheel drive Wheel chair
Yes Yes Yes Yes
Rear wheel drive Wheel chair
Yes No No No

WHEEL CHAIR TYPES Stability on straight path
Stability on inclined path
Mid wheel drive Wheel chair
equal more
Front wheel drive Wheel chair
equal moderate
Rear wheel drive Wheel chair
equal least
WHEEL CHAIR TYPES
Front position Mid position End position
Front wheel drive Wheel chair
Less stable stable stable
Mid wheel drive Wheel chair
- - -
Rear wheel drive Wheel chair
stable stable Less stable
Stability due to battery allocation on an inclined plane:

GRAPHICAL ANALYSIS
Mid wheel drive Wheel chair
Front wheel drive Wheel chair
Rear wheel drive Wheel chair
0
20
40
60
80
100
120
Chart Title
turning radius obstacles Rear wheel drive Wheel chair

ADVANTAGES
• Less expensive then the conventional automatic wheel chairs.
• Obstacle detection using IR sensors.
• Front wheel drive provides high maneuverability
• Straight stem in caster help aids in smooth operation.

DISADVANTAGES
• Requires smartphone for operation as a accelerometer is the main device over which the main system is dependent.
• Battery recharging is needed so smartphone battery and battery to drive the motor have to periodically recharge and maintained.

SOLUTIONS TO PROBLEMS
1.) THE VERTICAL CASTER STEM OF THE FREEWHEELS IN THE REAR END REDUCE THE STABILITY RELATED ISSUES OF THE WHEELCHAIR .
2) CONTROLLING ISSUE IS HANDELED THROUGH THE USE OF I.R. SENSORS WHICH IMPROVE CONTROL AND HANDLING.
3) MANUVERABILITY AND HANDLING OF THE WHEELCHAIR SYSTEM IS IMPROVED BY CHOOSING THE FRONT WHEEL AS MOTOR DRIVES.
4) REDUCED COST OF THE WHEELCHAIR AS ONLY BLUETOOTH IS USED FOR COMMUNICATING BETWEEN THE DEVICES RATHER THAN A VIRTUAL CIRCUIT. THUS THE COST OF ADDITIONAL ELECTRICAL CIRCUITORY AND MECHANICAL GEAR ASSEMBLY IS REDUCED.
5) TWO 12 VOLTS 3.5 AMP BATTERIES WERE USED INSTEAD OF DIRECT CURRENT SUPPLY BUT DUE TO OVERCHARGING OF THE BATTERIES THE CIRCUITS WERE BURNT AS THE DISCHARGING RATE OF THE BATTERIES WERE 4.5 AMP AND THIS LED TO FAILURE . THEREFORE USE OF 12 VOLTS , 3.5 AMP DC BATTERIES IS RESTRICTED UNTIL THE PROBLEM OF OVERCHARGING IS SOLVED.

IMPROVEMENTS AND MODIFICATION
• Can also alarm the user about the obstacle.
• Improvements can be made by using various hand gestures of the user.
• Battery can be recharged by alternator.
• Automatic balancing of sitting area can be provided using secondary accelerometer in case of bumps and curbs.
• Movements can be controlled and location of wheelchair can be tracked using server connection.
• Eyes movement based automated wheelchair.

REFERENCES
• Based on the research paper “Smartphone Accelerometer Controlled
Automated Wheelchair” by Vigneshwar. Santhanam and Vignesh. Viswanathan.
• http://psrcentre.org/images/extraimages/ICECEBE%20113824.pdf
• Wikipedia - Smartphone, http://en.wikipedia.org/wiki/Smartphone
• www.parth-shah.org
• mirley.firlej.org
• junweihuang.info
• nextsepian.com