Final opto-mechanical design of Raven, a MOAO science...
15
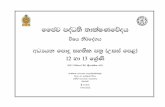
Final opto-mechanical design of Raven, a MOAO science demonstrator for Subaru Olivier Lardi` ere a , Reston Nash a , J.-P. Markes a , Dave Andersen b , Colin Bradley a , C´ elia Blain a , Ronald Desmarais a , Darryl Gamroth a , Meguru Ito a , Kate Jackson a , Przemek Lach a , Laurie Pham a a University of Victoria, 3800 Finnerty Rd., Victoria, BC, Canada b NRC/Herzberg Institute of Astrophysics, 5071 West Saanich Rd.,Victoria, BC, Canada ABSTRACT Raven is a Multi-Object Adaptive Optics (MOAO) technical and scientific demonstrator which will be used on the Subaru telescope with the IRCS spectrograph. The optical and mechanical designs are finalised and the system is now being integrated in the lab at UVic. Raven features three open-loop wavefront sensors (WFS) patrolling a 3.5’ field of regard, one on-axis LGS WFS, two science channels each equipped with a pick-off arm, an 11x11 actuator deformable mirror, a closed-loop WFS for calibration and performance comparison and an image rotator. This paper presents in detail the optical design and its performance, as well as the mechanical design. Keywords: adaptive optics, optical design, on-sky demonstrator 1. INTRODUCTION The Raven project, being developed at the University of Victoria (UVic) Adaptive Optics Lab, will be the first Multi-Object Adaptive Optics (MOAO) 1 science and technical demonstrator on an 8 m class telescope. In partnership with NAOJ and the Herzberg Institute of Astrophysics, the Raven team will deliver a visitor instrument to the NIR Nasmyth platform of Subaru. Raven will feed the IRCS NIR imaging spectrograph. 6 Raven features three natural guide star (NGS) WFSs and two science arms patrolling a 3.5’ diameter field of view (FoV). An additional on–axis sodium laser guide star (LGS) WFS will enhance the performance or the sky coverage. We invite the reader to refer to Ref. 2, 3 and 4 to respectively get an overview of Raven, a description of the Calibration Unit (CU) subcontracted to INO, and some recent results about tomographic reconstruction. This paper is much more focused on the opto-mechanical design of Raven and its performance. 2. OPTICAL DESIGN 2.1 Main drivers The main requirements which have driven the optical design of Raven are: 1. the optical interface with Subaru’s Nasmyth platform and IRCS spectrograph, 2. the image rotator of Subaru cannot be used, otherwise the back focus is too short to accommodate Raven 3. Raven should be a self-contained instrument (no software interface with the Telescope Control System or the LGS facility), 4. large Field of Regard (FoR): 3.5 arcmin., 5. large spectral range: 0.6–0.9μm for wavefront sensing, 0.9–2.5μm for science, 6. registration error between the deformable mirrors (DM) and the WFSs lower than 6% of one subaperture for any wavelength and pick-off location, Send correspondence to O.L.: [email protected] Adaptive Optics Systems III, edited by Brent L. Ellerbroek, Enrico Marchetti, Jean-Pierre Véran, Proc. of SPIE Vol. 8447, 844753 · © 2012 SPIE · CCC code: 0277-786/12/$18 · doi: 10.1117/12.927176 Proc. of SPIE Vol. 8447 844753-1
Transcript of Final opto-mechanical design of Raven, a MOAO science...

Final opto-mechanical design of Raven, a MOAO sciencedemonstrator for Subaru
Olivier Lardierea, Reston Nasha, J.-P. Markesa, Dave Andersenb, Colin Bradleya, Celia Blaina,Ronald Desmaraisa, Darryl Gamrotha, Meguru Itoa, Kate Jacksona, Przemek Lacha, Laurie
Phama
aUniversity of Victoria, 3800 Finnerty Rd., Victoria, BC, CanadabNRC/Herzberg Institute of Astrophysics, 5071 West Saanich Rd.,Victoria, BC, Canada
ABSTRACT
Raven is a Multi-Object Adaptive Optics (MOAO) technical and scientific demonstrator which will be used onthe Subaru telescope with the IRCS spectrograph. The optical and mechanical designs are finalised and thesystem is now being integrated in the lab at UVic. Raven features three open-loop wavefront sensors (WFS)patrolling a 3.5’ field of regard, one on-axis LGS WFS, two science channels each equipped with a pick-off arm,an 11x11 actuator deformable mirror, a closed-loop WFS for calibration and performance comparison and animage rotator. This paper presents in detail the optical design and its performance, as well as the mechanicaldesign.
Keywords: adaptive optics, optical design, on-sky demonstrator
1. INTRODUCTION
The Raven project, being developed at the University of Victoria (UVic) Adaptive Optics Lab, will be thefirst Multi-Object Adaptive Optics (MOAO)1 science and technical demonstrator on an 8 m class telescope.In partnership with NAOJ and the Herzberg Institute of Astrophysics, the Raven team will deliver a visitorinstrument to the NIR Nasmyth platform of Subaru. Raven will feed the IRCS NIR imaging spectrograph.6
Raven features three natural guide star (NGS) WFSs and two science arms patrolling a 3.5’ diameter field ofview (FoV). An additional on–axis sodium laser guide star (LGS) WFS will enhance the performance or the skycoverage. We invite the reader to refer to Ref. 2, 3 and 4 to respectively get an overview of Raven, a descriptionof the Calibration Unit (CU) subcontracted to INO, and some recent results about tomographic reconstruction.This paper is much more focused on the opto-mechanical design of Raven and its performance.
2. OPTICAL DESIGN
2.1 Main drivers
The main requirements which have driven the optical design of Raven are:
1. the optical interface with Subaru’s Nasmyth platform and IRCS spectrograph,
2. the image rotator of Subaru cannot be used, otherwise the back focus is too short to accommodate Raven
3. Raven should be a self-contained instrument (no software interface with the Telescope Control System orthe LGS facility),
4. large Field of Regard (FoR): 3.5 arcmin.,
5. large spectral range: 0.6–0.9µm for wavefront sensing, 0.9–2.5µm for science,
6. registration error between the deformable mirrors (DM) and the WFSs lower than 6% of one subaperturefor any wavelength and pick-off location,
Send correspondence to O.L.: [email protected]
Adaptive Optics Systems III, edited by Brent L. Ellerbroek, Enrico Marchetti, Jean-Pierre Véran, Proc. of SPIE Vol. 8447,844753 · © 2012 SPIE · CCC code: 0277-786/12/$18 · doi: 10.1117/12.927176
Proc. of SPIE Vol. 8447 844753-1

CalibrationUnit
LPJ
Telescope '<Flip mirror
1DM rgurelsource J
DM
D M* I
BS
JHK
Acq.cameraA
1LGSVWFS
BS
_I JHKVR!
-CL
WFSS I
Rot
Rot
Figure 1. Functional block diagram of RAVEN. Dashed blocks are deployable.
7. Raven throughput greater than 0.32 in H band, telescope and IRCS excluded, to stay competitive withA0188, the existing Subaru AO system, and keep the multiplex advantage.
Hequirement 1 sets the entrance and exit beam f/# to about 13.9, while requirements 2 and 3 impose Ravento cope with the field rotation, telescope tracking errors and windsake. It has been decided to track the fieldrotation and correct the telescope tracking errors by moving the pick-off arms during observations.
Requirement 4 avoids the use of a common woofer correcting the ground layer and/or a fast steering mirror(FSM) correcting the atmospheric tip/tilt and windshake.
Pequirement 5 leads to a mostly reflective design. while requirement 6 leads to a telecentric system inducingno pupil shift or rotation when the pick-off mirrors are moving across the FoV. The last requirement pushed usto reduce the number of optical surfaces and give optical power to some fold mirrors.
Performance analysis, tolerancing and ghost image analysis have been done for whole system with Zemax.Merit functions have been defined both in the image and pupil planes to minimise the wavefront aberrations aswell as the pupil distortion and lateral shift, i.e. the DM/WFS registration errors. Also, special efforts have beenmade to mitigate any kind of variable aberrations (versus field location, wavelength, zenith angle, etc.) in orderto reduce the non-common path aberration and ease the calibration of the system.
2.2 Optical layoutAn optical functional analysis of RAVEN resulted in an instrument architecture consisting in 8 main subsystems(Fig. 1) which are
1. Calibration unit The Calibration Unit (CU) is a telescope simulator and a turbulence generator ableto calibrate and test the AO system in the lab or at the telescope between observations. The CU providesa 7x7-star asterism over 2.4 arcmin FoV and a central LGS. A DM, refereed as calibration DM (CDM),generates the ground layer turbulence, while two spinning phase screens conjugated at 5 and 10km generatehigh altitude turbulence. The CU has been designed and built by INO.3
2. OLWFSs : Three deployable pick-off mirrors can patrol the telescope focal plane and pick off three NGSwithin a 3.5 arcmin FoR. Each pick-off mirror feeds one open-loop (OL) WFS.
1DM figure CL
Off-axis DL DLs01 I source I WFS
sources WFS W ES WESVR1
BS
) I RCSBeamcombiner
Proc. of SPIE Vol. 8447 844753-2

3. Science Pick–Offs : Two pick–off mirrors mounted on a ρ–θ stage feed the Science Relay. A trombonecompensates any variation of the optical path length.
4. Science Relays : Raven has two science channels. Each channel consists of an optical relay which formsa pupil on a DM and focuses the beam onto the Beam Combiner. An image rotator keeps each scienceobject aligned onto the IRCS slit for the duration of the exposure.
5. Beam Combiner : The beam combiner is responsible for sending the two 4” diameter science FoV intothe IRCS spectrograph. The 2 science FOV are packed side–by–side horizontally 4” apart in order to feedthe IRCS slit with no overlap. The beam combiner consists of a roof mirror located in a focal plane followedby a relay lens.
6. CL-WFS : A closed loop WFS (CL-WFS) is available on each science channel in order to calibrate theAO system, to monitor the DM shape during science observations (with the Figure source), or to performclosed loop AO correction on bright targets.
7. LGS–WFS: An on–axis sodium LGS is available at Subaru which can significantly increase the perfor-mance and/or sky coverage of Raven. A LGS–WFS can work in OL in addition to two or three NGSWFSs.
8. Acquisition camera: An acquisition camera displays the whole field of the telescope with the silhouettesof the pick–offs arms.
Figures 2 to 3 depicts the full optical layout of Raven. All the optical components have been sized to transmitthe 3.5 arcmin FoV provided by the telescope without vignetting.
The optical layout of Raven is fully symmetrical, beside the LGS WFS, with respect to the vertical planecontaining the telescope optical axis. The three NGS OL–WFS paths are located around the telescope focus andarranged in a plane perpendicular to the telescope optical axis. The telescope optical axis, the science path, theCL–WFS path and the output beam axis are all contained in the same horizontal plane, which constitutes themain level of the Raven optical layout. The LGS–WFS path and the acquisition camera path lie respectivelyunderneath and above this main level.
The layout has been optimized with a merit function to balance the clearance between each componentsand fit all the components in the available space. The optical design of the CU being subcontracted to INO, asimplified first–order design of CU has been represented in these figures.
A few lenses and mirrors are off-the-shelve, but most of the optical components are custom to meet the specificrequirements of Raven. All the custom components of Raven have been manufactured by BMV Optical (Ottawa,Canada), excepted the off-axis ellipsoid (OAE) mirrors (Sec. 2.7) made by Precision Aspheres (Fremont, USA).
2.3 Powered entrance window
The first optical component of Raven is a powered entrance window (PEW) with the dual purpose of keepingthe system clean and putting the exit pupil of the telescope at infinity. In such a telecentric system, all the chiefrays are parallel, making the pupil stationary on the WFS lenslet arrays (LAs) and on the DMs whatever thepick–off mirror location.
The PEW is a 180mm–diameter plano–convex lens (f=17.6m) made of CaF2, a very low dispersion glass.The chromatic errors are lower than the Airy disc radius. At 1 arcmin from the optical axis, the lateral color is7µm and 8.5µm for the WFS wavelengths (0.6–0.9µm) and the science wavelengths (J, H, K bands) respectively.After the PEW the beam is at F/13.6 and the plate scale is 31.35mm/arcmin.
As the PEW has little impact on the image, commercial tolerances are good enough. In the pupil plane, thelateral ray intercept spread is lower than 1.2% of a subaperture with 90% of confidence.
Proc. of SPIE Vol. 8447 844753-3

AG/SH
surface
AG/S H
surface
V
En
w
Entrance
window
Science
pick-offs
200 mm
Jjj-...-_--. - _________
NGS
pick-offs
OL-WFS
NGS
pick-offs
[lipmirror
CalibrationUnit
OL-WFS
Acq. Cam.
[SM
[iguresource
LGS-WFS
DMCL-WFS
Commonoutput pupil
IRCS
C
IRCS
Figure 2. Side and top views of the Raven optical layout. Both science and WFS paths are represented here, in additionto the calibration unit, the acquisition camera and the CL-WFSs.
CalibrationUnit
1
z Bench size: L1400, W12OO mm
Proc. of SPIE Vol. 8447 844753-4

Phase
screens
AG/SH
surfaceEntrance
Calibration - OWUnit
ItCDM
Figuresource'
Flip
mirror
Acq.Cam.
OAERoof mirror
Relay
lens
Figuresource
I RGS
DM
Figure 3. 3D shaded model of Raven from Zemax.
Table 1. Open-loop NGS SH-WFS specifications.
2.4 NGS OL-WFSsThree Shack-Hartmanri (SH) WFSs are installed in a vertical plane, 15mm before the telescope focal plane.The three WFSs are located around the optical axis in a Y-shape, respectively at 00 I.l300 and -130° fromthe downward axis (Figs. 3 and 4). Each WFS is mounted on x-y translating stages to prevent the pupil fromrotating on the WFS lenslet array (LA) as the WFS pickoff arm moves across the FoV.
Figure 5 shows the optical layout of one OL-WFS. Each OL-WFS probe arm consists of a flat pick-off mirrorreflecting the beam toward an achromat (stock lens from Ross Optical, f=40.5rnm, dia.=l3inm) This achromatcollimates the beam and forms a 3.0mm diameter pupil on a LA. A standard LA from SUSS MicroOptics(300im-pitch, f=4.77mm) is perfectly suitable for Raven. A 589.3nm notch filter blocks the Rayleigh scatteringof the sodium LGS. An achromatic 1:1 relay lens reirnages the spots of the LA on the detector. This relay lens ismade of two identical custom achromats arranged in a symmetric telecentric scheme. The detector is a 128x 128pixel EMCCD iXon 860 camera from Andor Technology. Table 1 lists the parameters of the OL NGS-WFSs.
As the LA converts the wavefront errors into spot positions, the merit function of the 1:1 relay lens should
Active pixels 128x 128Pixel size 24x24 irnSensor area ( pupil size) 3.1x3.1 111111
Subaperture lOx 10Pixels per subaperture 12x12Pixel scale 0.38" /pixWFS FoV 0 4.8"
Proc. of SPIE Vol. 8447 844753-5

Science pickofftranslation stage
:00k
1iIrHni
Figure 4. CAD model of the OL-WFS and science pickoff arms. The three OL-WFS are mounted on a vertical xy stages,while the science pickoff arms are mounted on a pO stages. Passed the Elbow mirror the science beam is stationary.
[/13.6 beam from Subaru -f PEW
Pick-off mirror5x7. 1mm
Science pickoffrotation stage
z
Field stop0=5" (2.5mm)
/ Collimating lens/ f4O.5mm, 0=13mm
rnLU
Na notch filter
Lensletarray
d300/Irn1=4.77mm
1:1 Relayf35mm, 0=12.5mm
Science pickoffmirrors
I
Figure 5. NGS OL-WFS optical layout.
Elbow mirror
I
50 11101V >x
Proc. of SPIE Vol. 8447 844753-6

o -150S
-200
Tilt response of the WFS (polychronhiitic)
(a)
Field-clependant aberrations induced by the WIS relay lens (polychromatic)
o 76 I grrtn,) Zmx- ZO cube fito Z8 (oorta) Zemaa data
Z8 cubic lit
Z62,3a-O.24at 10Z8 = - 0.79 x3 + 0.11 a2 + 0.013k
(b)
Figure 6. Field-deperodant aberrations induced by the WFS relay lens distortion after centroiding and phase reconstruction.The main modes are tip/tilt (a), astigmatism and coma (b). The non-linearity error in tilt is 0.4% of the incoming WFtilt.
be driven by the image distortion and not by the wavefront error. To add some complexity, the image distortionof the relay lens varies with the wavefront tilt, generating field-dependant aberrations and non-linearity error inthe tilt response of the WFS. Field-dependant aberrations and non-linearity of WFSs are usually not an issuein classic close-loop AO systems (the spots are kept close the subaperture centres), but they are critical in anopen-loop systems, such as Raven.
The doublets of the relay lens has been optimized with Zerna.x to provide minimal distortion on-axis and at2.4" on-sky (i.e. the edge of the WFS FoV). This improves the linearity of the WFS tilt response and minimize thehigh-order aberrations, like astigmatism and coma (Fig. 6). Despite the good performance of the WFS design,the WFS response will be linearized by software by updating the slopes offsets as a function of the wavefronttip/tilt.
2.5 LGS-WFSAn on-axis sodium LGS is available at Subaru for Raven. The LGS focus location ranges from 76.6 to 153 9mmbehind the telescope focal plane for a zenith angle of 600 and 0° respectively. Figure 7 displays the optical layoutof the LGS WFS. The LGS WFS path lies underneath the bench top surface and is bent sideways at 900 to easeaccess (Fig. 11).
First, the LGS beam pass through a hole in the Acquisition fold Mirror (Sec. 2.10) located 100mm behind theNGS focus. Right behind this mirror, there is another fold mirror (LGS fold) sending the LGS beam downward.Then, an achromat forms a pupil plane on a fast steering mirror (FSM) from P1 (S-330-8SL) used for windshakecorrection up to 1.5" on sky. A beam reducer made of two achromats forms a 3mm diameter pupil on the LA.A Li relay lens reimages the LA spots on the detector. The same LA, relay lens and camera are used for theLGS WFS and NGS WFSs, except the coating which is optimized for 589nm. A sodium line pass-band filterblocks all the wavelengths outside the band 589.3 ±lOnm to reduced the background due to the sky and thenearby stars. The LGS WFS optics have been optimized in order to minimize the variation of the aberrationswith the Zenith angle.
2.6 Science pick-off armsThe science pick-off mirrors are located in a vertical plane 20mm behind the telescope focal plane, i.e. 35mmbehind the OL-WFS pick-offs to avoid collisions. Each pick-off mirror is mounted at the tip of a rotatingtelescopic arm. A fold mirror, refereed to as Elbow Mirror, is located at the joint of the arm and is parallel tothe pick-off mirror to provide a fixed optical axis (Figs. 2, 4 and 8a). This periscopic scheme does not rotate thepupil when the arm turns around its joint. After the Elbow Mirror, a trombone, made of two fold mirrors at 90°from each other, keeps the optical path length constant.
100 60y = 4 x3 -7.1 - 230 x o Zax.5o St- Cb.c
E40
30-511
20
-10010
1.8 2.42.3 0.6 0.9 1.2 1.5WF 'TOt [arucu. sky]
-250 200.3 3.5 O 1,2 1.5 24
ActuI WF 'Tilt (aoao. 6, kyJ
Proc. of SPIE Vol. 8447 844753-7

z y
x100 mm
Acq. FoldMirror
Collimatinglens
ICollimating Y-Z stage Z stage
lens
Fold
FSM
Y-Z-stage (lOnirn travel)
Beam reducer
Beam reducer
LA
L
Z-stage (45mm travel)
Iris
Lensletarray
d=3OOirnf=4.77mm
1:1 Relay
EMCCD
camera
Camera
Figure 7. LGS WFS Zemax (top panel) and CAD (bottom panel) models. The whole optical train is mounted on a 2-axishorizontal stage (Y-Z stage) to track the slow lateral motion of the LCS spot (up to ±10" on sky) due to differentialmechanical flexion of the telescope and the LGS launch telescope or a misalignment of the tertiary mirror. A linear stage(Z-stage), holding the components from the iris to the camera, traaks the axial motion of the LGS focus due to the zenithangle variation. The red and blue beams are for zenith angle 0 and 60° respectively. For clarity purpose, the path isunfolded (the FSM is actually fold at 90° around X-axis) and the blue beam is not shown after the iris.
NGS focal to Acquisition
plane Camera
Proc. of SPIE Vol. 8447 844753-8

i.TromboneComPensatof
. a a
(a) (b)
Figure 8. (a) Picture of one science pickoff arm with the trombone equipped with the final optics. The red line shows thescience path, the yellow line is the figure source path. (b) DM mount with the P1 P-528-TCD tip/tilt stage.
The pickoff mirror is not flat but toroidal in order to conjugate the pupil on the science DM with no pupilastigmatism. The second mirror (M2) of the trombone is actually a custom partial mirror reflecting 97% of thescience beam, and transmitting 3% of the figure source emitting in the 500-530nm band (Fig. 8a).
2.7 Science relayBehind the science pickoff arm and the trombone, there is an off-axis ellipsoid (OAE) mirror, a DM, a long-wave-pass (L\\P) beam-splitter, a K-mirror and a roof mirror (Fig. 2). Basically, the science path is nothing but a1:2 image relay with one field "lens" at each end (pickoff and roof mirrors). The telescope focus is at one focuson the OAE. and the roof mirror is near the second focus of the OAE. Both pickoff and roof mirrors are nearan image plane and can be powered to put the pupil at the right spot as does a field lens. The pick-off and roofmirror are indeed both toroidal to put the pupil on the DM and at infinity (for IRCS) respectively.
The science DM located in a pupil plane is a custom magnetic DM from ALPAO featuring 13x13 actuators(145 in total) over 30mm clear aperture, but only lix 11 actuators will be in the beam footprint. This provides a1-actuator safety ring mitigating edge effects. Each DM is mounted on a fast tip/tilt platform from PT (Fig. 8b)to enhance the tip/tilt stroke and correct the windshake up to ± 1.6" on sky.
The LWP beam-splitter is required to reflect the visible light to the CL-WFS (Sec. 2.9) arid transmit the ITlight to IRCS. The LWP is in fused silica, 5mm thick with a wedge of 10.5 arcmiuutes. The purpose of this smallwedge is (i), to send the ghost image out of the science FoV, and (ii), to reduce the lateral color from 13im to4tm in the output focus (Fig. lOa). The lateral color induced by the LWP in the exit pupil is oniy 0.17% of thepupil diameter.
Also a Kmirror allows elongated science targets to be rotated and aligned with the IRCS slit during longexposures (Fig. Oa).
2.8 Beam combinerAt the end of the science path, there is a beam combiner feeding IRCS made of a roof mirror (Fig. 9b) and a 2:1exit relay lens. The purpose of the roof mirror is to (i), re-arrange the two science beams side by side 4" apart
Proc. of SPIE Vol. 8447 844753-9

(a) (b)
Figure 9. (a) Image rotator. Because of their small size, each of the rotator's three mirrors is fixed with no adjustmentsto a single block, which is mounted to a rotation stage. An accuracy of 2pm has been measured on the locations of themirrors. (b) Roof mirror. The roof mirror is actually made of two distinct rectangular mirrors almost in contact on oneside. Each mirror is toroidal to conjugate the exit pupil of Raven to infinity, ma.ximising the throughput in IRCS.
on sky to fit both science targets into a single 8" -long slit, and (ii), superimpose the exit pupils of both channelsso that IIRCS sees only one beam.
The exit relay lens re-images the focus of the OAE to a more accessible location for IRCS and restore theinitial F/# of the beam. This lens is a custom 42mm diameter air-spaced doublet providing diffraction-limitedimages from 0.9 to 2.5im (Fig. lOa).
2.9 Figure source and Closed-Loop WFS pathThe DM of each science channel is followed by a WFS (CL-WFS) to allow the DM to be calibrated and also tobe controlled in closed-loop on bright targets. In addition, an internal source emitting at 530nm, refereed to asFigure source, can be turned on to check the DM shape during open-loop operations on faint targets. In thatcase the WFS is used as a Figure WFS.
Two beam-splitters are required, one to combine the figure source beam with the science beam (TromboneM2), and a LWP to feed the CL-WFS with the visible part of the science beam. A compensator plate tiltedat 45° is added in the figure source path to cancel the astigmatism due to the tilted trombone M2 and thenmitigate the non-common path aberrations (Fig. 8a).
In each CL-WFS path, there is a beam reducer, a LA in a pupil plane and a 1:1 relay lens (Figs. 2 and 13).The parameters of the CL-WFS are identical to those of the OL-WFS (Tab. 1).
2.10 Acquisition camera pathA camera looking at the whole focal plane of the telescope can be used to ease the acquisition of the targetswith the pickoff arms. A dinitrnahle light can shine the arms to see them on top the asterism. A fixed octagonalfold mirror located behind the science pick-offs reflects the beam towards the acquisition camera located abovethe science path plane (Fig. 2). A 14mm diameter central hole lets the LGS beam going through the LGS WFS.After the fold mirror, a custom triplet collimates the beam onto an off-the-shelves C-mount imaging lens fromSchneider Optics (17mm f/0.95 XENON). The exit pupil formed by the triplet matches the entrance pupil ofthe imaging lens.
The camera is a Dalsa Pantera 1M30 featuring 1024x 1024 12pm side pixels. The exposure time, the gainand the binning factor can be adjusted. This camera is not cooled but shou'd be able to detect a 15-magnitudestar in a one-second exposure.
Proc. of SPIE Vol. 8447 844753-10

.aa .a. .a.a II a" ..aa a .a Ia.I 1 2111 oWs. ]aa ia,j 0005. aUS idI 055 0.000 IbU' 'U .- .00000, -0000 IdagJ 0000], -10000 0I 000%. -10 10a5r,.... 400 . 0004 %gO 00000. 0.000 d0 000%. 0-000rot..F ,1,..I I
1u?1, i III.. 1UI tu... .. o...:......: w:......: :......:
"a a ma "aa"" a a"' 00 a .a.a a a a a, a a" a aa" W]
ro ,. .....;;...t1V NU ro 0 0
U ç
/IU0-' dUJt rIUL 'u..I ,..r-I.. dUJ..l .
U
'4 U '4 U '4 U......r.. r..a" am a
a" a "a' ..aa' aa "a' a a"'_"" ,a "a'a a
0000
Iro ,. Uro 0. . UUII.,.r00.oat.l t..o. aI I-11I,a.r1fl 0 a a
0-IucsJ4.:.flItUasUa I..t' Ultu. U ,,' 1l
UU U aL0UL0UA U.......r..4 UO0U..IU4......r.. a
0l1f Width From Cntro3d am.
iPOF Utrmo Enoapmrd EjyFoUmm RoUUy OpFi.iaUd FilapUoUd CLlier Ldrdjèrh IlhrUreXT0::a, RAVEN hoonaacn Rmly OptUmiOmU FllUpWoUd :ir thrU 1ard±erLv
14/02/2012 100am a' Wary Wdoo. 20041 am. Iamb Po1y.,ror.hic Admptivm Optima, IambrXaa,: 010 lIP 000 0000 1310 301 2330 lOP 310
oh Vochoram flota, baa,, not bccra aacaa1d by dihLr,,chion lo,,jt vnraaohy oh Vactorom00 1003 UOF 31103 31033 CI 30331 00303 31W 11330
Cc00lr boo 010 0000100000000,, CUom0000 Conhogurmhaora 1 oh 1torImo,, 0000000 r00rW4aU4_WXW00 dO
Con aar0taOra 1 oh
(a) (b)
Figure 10. (a) Spot diagrams on IRCS slit for one science channel (±2" FoV) in J, H and K bands. The spot diagrams ofthe second channel are a mirrored copy. Only the fields #4 to 6 (central row) go through the slit of IRCS (others fieldsare still useful for imaging mode). Circles show the Airy disc in H band. (b) Geometric ensquared energy in the slit in Hband for all the 9 fields defined in (a). The slit half-width is 27im in Grism mode and 37.5pm in Echelle mode.
2.11 Overall performanceThe Zemax model of IRCS spectrograph, provided by Subaru, has been added behind Raven model to check thatall the rays pass properly through the pupil stops and the slit of IRCS. The spot diagrams and the ensquaredenergy in the slit plane are plotted in Figs. lOa and lOb respectively. The nominal design of the whole systemprovides diffraction-limited images and 100% of the energy in the slit.
3. MECHANICAL DESIGNThe mechanical design of Raven has been made with SolidWorks and ANSYS. The whole instrument fits ona 1400 x 1200mm bench. The bench is custom made by Newport from two layers of standard stainless steelhoneycomb tables sandwiched together (model RS 2000). The table top features 25mm-pitch threaded holeswith tuned mass damping. The lower layer has the mount for the hexapod used to align the bench with respectto the telescope. Custom cuts made inside the bench accommodate the bottom OL-WFS and the LGS-WFS(Fig. 11). Ref. 2 gives complementary views and pictures of the bench.
An alumniniuni gantry supports the two upper OL-WFS, the acquisition camera path and the roof mirrormounts (Fig. 9b). Substantial brackets and beams stiffen the gantry structure and mitigate vibrations of theWFSs. Finite element analysis shows that the lowest eigen frequency of the loaded gantry is 240Hz (Fig. 12).
To ease the integration and alignment of Raven, each sub-system is mounted on its own kinematic baseallowing a repeatable repositioning. Figure 13 shows the CL-WFS kinematic mount as an example.
Motorized translation amid rotation stages are all from P1. Most of the lens and mirror mounts are standardfrom Newport or Melles Griot.
4. ALIGNMENT PROCEDURESTo ease the alignment procedures of Raven, each subsystem (WFSs arms, science pickoff arms, trombone, imagerotator) will he internally aligned on side with dedicated tools or jigs. Then each subsystem will be installed onthe bench through a kinematic base (Fig. 13) and aligned with respect to the rest of the system with nudgers.
A portable coordinate measuring machine (FARO arm) is used to position the components of Raven at theirnominal locations. Most of the lens or mirror mounts have a locating feature for the FARO arm probe. The
Proc. of SPIE Vol. 8447 844753-11

Acquisition camera
Science pickoff
VRoom for CU
Beam fromthe telescope
Figure 11, Raven components are mounted on a custom bench made by Newport. Openings have been made to accom-modate the lower OL-WFS and the LCS-WFS. A gantry holds the two upper OL-WFS and the acquisition camera path.The CU, entrance window. LGS-WFS and exit relay lens are not represented in this figure.
0100
Figure 12. Third mode of the gantry computed by FEA. The frequency of the first mode is greater than 24OH.
Room forLGS-W F'S
Proc. of SPIE Vol. 8447 844753-12

Clamping screw
Ball-tippedadjustment screw
V-grooves clampedon the bench
Figure 13. Close-loop WFS on its kinematic base. Three bail-tipped adjustment screws are in contact with three hardenedsteel V-grooves clamped on the bench.
FARO arm software can read directly the coordinates generated by Zemax. The main steps of the alignment ofan optical component or subsystem are:
position targets (cones or balls) materialising the optical axis with a FARO arm,
position the component in translation with a Faro arm
adjust the tilt of flat mirrors with an alignment telescope and conical targets,
adjust the tilt of powered mirrors with a beam-splitter microscope (from Rolyn Optics, p/n 80.1135) andreflective balls.
At the telescope, the whole bench will be aligned with respect to the telescope optical axis with an hexapodinterfacing the bench to the Nasmyth platform. Fine alignments between Raven and the telescope (resp. IRCS)are possible by decentring the entrance window (resp. the exit relay).
FIRST OPTICAL TESTSThe current status of Raven is detailed in Ref. 2. Currently the CU is available along with two OL-WFSs whichcan scan the whole FoV. and the acquisition camera. This setup allowed us to, (i) characterise the CU in termsof image distortion, field-dependant aberrations and pupil lateral shifts, and (ii) measure the WFS tilt response.
The coordinates of each of the 37 (7x 7 array) seeing-limited pinholes provided by the CU have been measuredwith the WFS stage encoders. Figure 14 plots the actual positions of the pinholes with respect to the theoreticalposition (square grid). The position error is lower than 11.05% and features a centro-syminetrical pattern. Asthe perpendicularity error of the WFS translation stages has been compensated, this residual error is likely theactual image distortion of the CU.
Proc. of SPIE Vol. 8447 844753-13

40
30
20
10
EE
> 00U-
-10
20
30
40
CU pinhole array distortion (error magnified 15x)
:
-40 -30 -20 -10 0x-FoV [nini]
Figure 14. Coordinates of the 7x7 seing-limited pinholes provided by the CU measured by the WFS stage encoders. Theposition error, magnified 15 x, corresponds to an image distortion of ±1.05%
Figure 15 displays the maps of some Zernike coefficients of the wavefront, as well as the pupil shift, across thewhole FoV of the CU. The pupil shift has been measured with the centroid of the lenslet intensities. The focus mapshows a gradient on top of the field curvature of the CU. This focus gradient means the WFS translation stagesare not perfectly parallel to the focal plane of the CU. A 92nrn PV focus error on the wavefront corresponds to a0.7mm axial shift. As this focus error is not the dominant aberration and will be subtracted by software anyway(slope offsets), adding a shim between the stage and the gantry does not seem necessary for now. It is worthnoting that the map of a given Zernike coefficient across the FoV has the same shape than the correspondingZernike polynomial. Our measurements show a pupil lateral shift less than + 1% of the pupil diameter. Thisresult is in perfect agreement with the CU design and tests made by INO,3 which means that the alignments ofthe CU DM and the WFS LA are correct in z (exit pupil of the CU actually at infinity and LA in pupil plane).
As the OL-WFS has a large dynamic range and will be used in open loop, the response in tip/tilt have beenmeasured to asses the non-linearity error and to detect any modes induced by the tilt. For different locations inthe WFS FoV, the wavefront has been measured, as well as the translation stage positions. We actually measured0.1% of non-linearity in tilt from 0 to 1.2 arcsec, and l7nm PV of astigmatism at 1.2 arcsec from the centre.Beyond 1.2 arcsec the centroiding fails because the spots get too close to the subaperture boundaries. Again,those results are in good agreement with the Zernax model (Fig. 6).
6. CONCLUSIONPreliminary work on Raven began in mid 2010 and the project underwent an external Conceptual Design Review(CoDR) in March, 2011. The opto-mechanical design was finalized by the end of 2011 arid most of the criticalcomponents was ordered by early 2012. INO delivered the Raven CU in March 2012. With this critical componentand a single OL WFS mounted on the Raven bench, lab tests began in early May, validating the design of theexisting subsystems.
The next step is the integration of the science paths planned for July 2012, once the OAE mirrors manufac-tured by Precision Aspheres and the DMs from ALPAO will be delivered. All the custom optical components
20 4010 30
Proc. of SPIE Vol. 8447 844753-14

LI]I.
rJ
II.
.
1
x-FoV [mm]
y-F
oV
[m
m]
∆Z4 = 92nm PV
-20 0 20
-20
0
200
20
40
60
x-FoV [mm]
y-F
oV
[m
m]
∆Z11
= 14nm PV
-20 0 20
-20
0
20
0
5
10
x-FoV [mm]y-F
oV
[m
m]
∆Z5 = 188nm PV
-20 0 20
-20
0
20 -50
0
50
x-FoV [mm]
y-F
oV
[m
m]
∆Z6 = 91nm PV
-20 0 20
-20
0
20
-40
-20
0
20
40
x-FoV [mm]
y-F
oV
[m
m]
∆Z7 = 55nm PV
-20 0 20
-20
0
20
-30
-20
-10
0
10
20
x-FoV [mm]
y-F
oV
[m
m]
∆Z8 = 41nm PV
-20 0 20
-20
0
20
-10
0
10
20
x-FoV [mm]
y-F
oV
[m
m]
Pupil x-shift [% of pupil dia.]
-20 0 20
-20
0
20 -0.5
0
0.5
x-FoV [mm]
y-F
oV
[m
m]
Pupil y-shift [% of pupil dia.]
-20 0 20
-20
0
20 -0.5
0
0.5
Focus/Spherical Astigmatism Coma Pupil shift
Figure 15. Field-dependent aberrations measured by the Raven WFS scanning the whole FoV of the CU (7x7 seeing-limited pinhole grid). Only the variations of the focus, spherical, astigmatism and coma have been plotted. The centralpinhole is the reference. The aberrations are in nm PV on the wavefront. Those errors include the design error and allthe alignment errors (CU DM and WFS lenslet array conjugation errors, gantry misalignment).
made by BMV Optical are in the lab now. The mechanical design of LGS-WFS is done and all the parts are inorder. The LGS-WFS should be integrated by the end of the summer.
ACKNOWLEDGMENTS
The authors would like to thank all the Raven team as well as the Herzberg Institute of Astrophysics (HIA/NRC),Subaru telescope (NAOJ), and the National Institute of Optics in Quebec City (INO) for their fruitful collabo-ration. Raven is funded by the Canada Foundation for Innovation (CFI) and the British Columbia KnowledgeDevelopment Fund (BCKDF).
REFERENCES
[1] F. Hammer et al., “FALCON: a concept to extend adaptive optics corrections to cosmological fields,” inProc. SPIE 5382, pp. 727-736 (2004)
[2] D. Andersen and Raven team, “Status of the Raven MOAO science demonstrator,” Proc. SPIE 8447 (2012).
[3] J.-F. Lavigne, F. Lamontagne, G. Anctil, M. Wang, M. Tremblay, O. Lardiere, R. Nash, D. Andersen, M.Savard, P. Cote, C. H. Bradley, F. Chteauneuf, “Design and test results of the calibration unit for theMOAO demonstrator RAVEN,” Proc. SPIE 8447 (2012).
[4] K. Jackson, D. Andersen, C. Bradley, O. Lardiere, “Tomographic wavefront error estimation and measure-ment for Raven, a multi-object adaptive optics demonstrator,” Proc. SPIE 8447 (2012).
[5] M. Watanabe, H. Takami, N. Takato, S. Colley, M. Eldred, T. Kane, O. Guyon, M. Hattori, M. Goto, M.Iye, Y. Hayano, Y. Kamata, N. Arimoto, N. Kobayashi, Y. Minowa, “Design of the Subaru laser guide staradaptive optics module,”, Proc. SPIE 5490 (2004).
[6] A. Tokunaga, N. Kobayashi, J. Bell, G. Ching, K.–W. Hodapp, J. Hora, D. Neill, P. Onaka, J. Rayner,L. Robertson, D. Warren, M. Weber, T. Young, “Infrared camera and spectrograph for the SUBARUTelescope,” Proc. SPIE 3354, pp. 512–524 (1998)
Proc. of SPIE Vol. 8447 844753-15