Faunus Provides Big Graph Data
90
Faunus Provides Big Graph Data Analytics NOVEMBER 11, 2012 1 COMMENT Faunus is an Apache 2 licensed distributed graph analytics engine that is optimized for batch processing graphs represented across a multi-machine cluster. Faunus makes global graph scans efficient because it leverages sequential disk reads/writes in concert with various on-disk compression techniques. Moreover, for non-enumerative calculations, Faunus is able to linearly scale in the face of combinatorial explosions. To substantiate these aforementioned claims, this post presents a series of analyses using a graph representation of Wikipedia (as provided by DBpedia version 3.7). The DBpedia knowledge graph is stored in a 7 m1.xlargeTitan/HBase Amazon EC2 cluster and then batch processed using Faunus/Hadoop. Within the Aurelius Graph Cluster, Faunus provides Big Graph Data analytics. Ingesting DBpedia into Titan The DBpedia knowledge base currently describes 3.77 million things, out of which 2.35 million are classified in a consistent Ontology, including 764,000 persons, 573,000 places (including 387,000 populated places), 333,000 creative works (including 112,000 music albums, 72,000 films and 18,000 video games), 192,000 organizations (including 45,000 companies and 42,000 educational institutions), 202,000 species and 5,500 diseases. (via DBpedia.org)
Transcript of Faunus Provides Big Graph Data
Faunus Provides Big Graph Data Analytics
NOVEMBER 11, 2012 1 COMMENT
Faunus is an Apache 2 licensed distributed graph analytics engine
that is optimized for batch processing graphs represented across a multi-machine
cluster. Faunus makes global graph scans efficient because it leverages sequential
disk reads/writes in concert with various on-disk compression techniques. Moreover,
for non-enumerative calculations, Faunus is able to linearly scale in the face
of combinatorial explosions. To substantiate these aforementioned claims, this post
presents a series of analyses using a graph representation of Wikipedia (as provided
by DBpedia version 3.7). The DBpedia knowledge graph is stored in a
7 m1.xlargeTitan/HBase Amazon EC2 cluster and then batch processed using
Faunus/Hadoop. Within the Aurelius Graph Cluster, Faunus provides Big Graph Data
analytics.
Ingesting DBpedia into Titan
The DBpedia knowledge base currently describes 3.77 million things, out of which 2.35
million are classified in a consistent Ontology, including 764,000 persons, 573,000
places (including 387,000 populated places), 333,000 creative works (including
112,000 music albums, 72,000 films and 18,000 video games), 192,000 organizations
(including 45,000 companies and 42,000 educational institutions), 202,000 species and
5,500 diseases. (via DBpedia.org)
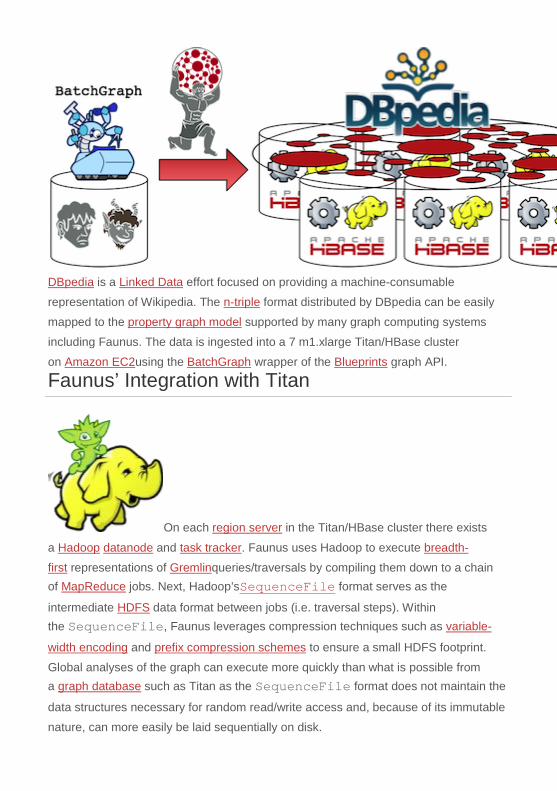
DBpedia is a Linked Data effort focused on providing a machine-consumable
representation of Wikipedia. The n-triple format distributed by DBpedia can be easily
mapped to the property graph model supported by many graph computing systems
including Faunus. The data is ingested into a 7 m1.xlarge Titan/HBase cluster
on Amazon EC2using the BatchGraph wrapper of the Blueprints graph API.
Faunus’ Integration with Titan
On each region server in the Titan/HBase cluster there exists
a Hadoop datanode and task tracker. Faunus uses Hadoop to execute breadth-
first representations of Gremlinqueries/traversals by compiling them down to a chain of MapReduce jobs. Next, Hadoop’sSequenceFile format serves as the
intermediate HDFS data format between jobs (i.e. traversal steps). Within the SequenceFile, Faunus leverages compression techniques such as variable-
width encoding and prefix compression schemes to ensure a small HDFS footprint.
Global analyses of the graph can execute more quickly than what is possible from a graph database such as Titan as the SequenceFile format does not maintain the
data structures necessary for random read/write access and, because of its immutable
nature, can more easily be laid sequentially on disk.
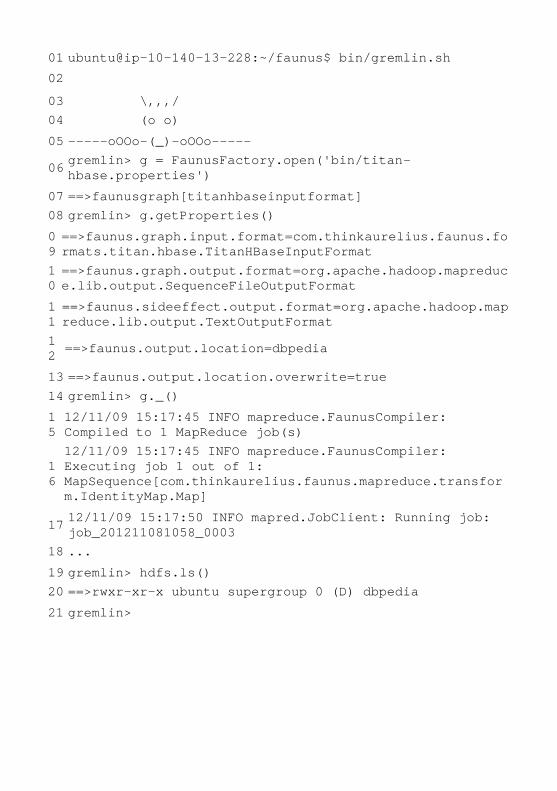
01 ubuntu@ip-10-140-13-228:~/faunus$ bin/gremlin.sh 02 03 \,,,/ 04 (o o) 05 -----oOOo-(_)-oOOo-----
06 gremlin> g = FaunusFactory.open('bin/titan-hbase.properties') 07 ==>faunusgraph[titanhbaseinputformat] 08 gremlin> g.getProperties() 09 ==>faunus.graph.input.format=com.thinkaurelius.faunus.formats.titan.hbase.TitanHBaseInputFormat
10 ==>faunus.graph.output.format=org.apache.hadoop.mapreduce.lib.output.SequenceFileOutputFormat
11 ==>faunus.sideeffect.output.format=org.apache.hadoop.mapreduce.lib.output.TextOutputFormat
12 ==>faunus.output.location=dbpedia
13 ==>faunus.output.location.overwrite=true 14 gremlin> g._() 15
12/11/09 15:17:45 INFO mapreduce.FaunusCompiler: Compiled to 1 MapReduce job(s)
16
12/11/09 15:17:45 INFO mapreduce.FaunusCompiler: Executing job 1 out of 1: MapSequence[com.thinkaurelius.faunus.mapreduce.transform.IdentityMap.Map]
17 12/11/09 15:17:50 INFO mapred.JobClient: Running job: job_201211081058_0003 18 ... 19 gremlin> hdfs.ls() 20 ==>rwxr-xr-x ubuntu supergroup 0 (D) dbpedia 21 gremlin>

The
first step to any repeated analyses of a graph using Faunus is to pull the requisite data
from a source location. For the examples in this post, the graph source is Titan/HBase.
In the code snippet above, the identity function is evaluated which simply maps the Titan/HBase representation of DBpedia over to an HDFS SequenceFile (g._()).
This process takes approximately 16 minutes. The chart below presents the average
number of bytes per minute written to and from the cluster’s disks during two distinct
phases of processing.
1. On the left is the ingestion of the raw DBpedia data into Titan via BatchGraph. Numerous low-volume writes occur over a long period of
time.
2. On the right is Faunus’ mapping of the Titan DBpedia graph to a SequenceFile in HDFS. Fewer high volume reads/writes occur over a
shorter period of time.
The plot reiterates the known result that sequential reads from disk are nearly 1.5x
faster than random reads from memory and 4-5 orders of magnitude faster than
random reads from disk (see The Pathologies of Big Data). Faunus capitalizes on
these features of the memory hierarchy so as to ensure rapid full graph scans.

Faunus’ Dataflows within HDFS: Graph and SideEffect
Faunus has two parallel data flows: graph and sideeffect. Each MapReduce job reads the graph, mutates it in some way, and then writes it back to HDFS as graph* (or to
its ultimate sink location). The most prevalent mutation to graph* is the propagation
of traversers (i.e. the state of the computation). The graph SequenceFile encodes
not only the graph data, but also computational metadata such as which traversers are
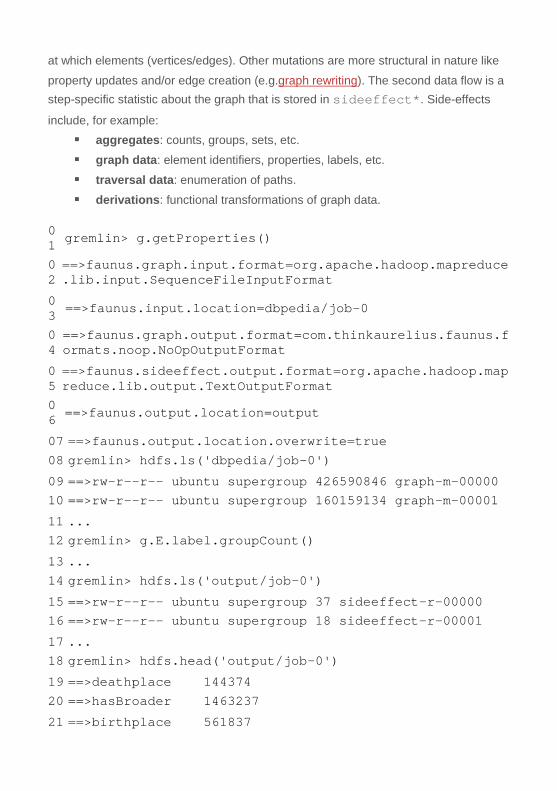
at which elements (vertices/edges). Other mutations are more structural in nature like
property updates and/or edge creation (e.g.graph rewriting). The second data flow is a step-specific statistic about the graph that is stored in sideeffect*. Side-effects
include, for example: aggregates: counts, groups, sets, etc.
graph data: element identifiers, properties, labels, etc.
traversal data: enumeration of paths.
derivations: functional transformations of graph data.
01 gremlin> g.getProperties()
02 ==>faunus.graph.input.format=org.apache.hadoop.mapreduce.lib.input.SequenceFileInputFormat
03 ==>faunus.input.location=dbpedia/job-0
04 ==>faunus.graph.output.format=com.thinkaurelius.faunus.formats.noop.NoOpOutputFormat
05 ==>faunus.sideeffect.output.format=org.apache.hadoop.mapreduce.lib.output.TextOutputFormat
06 ==>faunus.output.location=output
07 ==>faunus.output.location.overwrite=true 08 gremlin> hdfs.ls('dbpedia/job-0') 09 ==>rw-r--r-- ubuntu supergroup 426590846 graph-m-00000 10 ==>rw-r--r-- ubuntu supergroup 160159134 graph-m-00001 11 ... 12 gremlin> g.E.label.groupCount() 13 ... 14 gremlin> hdfs.ls('output/job-0') 15 ==>rw-r--r-- ubuntu supergroup 37 sideeffect-r-00000 16 ==>rw-r--r-- ubuntu supergroup 18 sideeffect-r-00001 17 ... 18 gremlin> hdfs.head('output/job-0') 19 ==>deathplace 144374 20 ==>hasBroader 1463237 21 ==>birthplace 561837
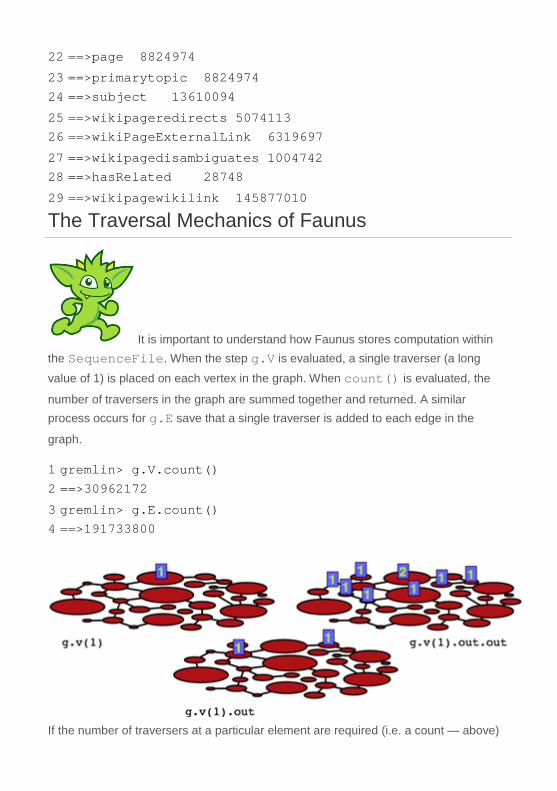
22 ==>page 8824974 23 ==>primarytopic 8824974 24 ==>subject 13610094 25 ==>wikipageredirects 5074113 26 ==>wikiPageExternalLink 6319697 27 ==>wikipagedisambiguates 1004742 28 ==>hasRelated 28748 29 ==>wikipagewikilink 145877010 The Traversal Mechanics of Faunus
It is important to understand how Faunus stores computation within the SequenceFile. When the step g.V is evaluated, a single traverser (a long
value of 1) is placed on each vertex in the graph. When count() is evaluated, the
number of traversers in the graph are summed together and returned. A similar process occurs for g.E save that a single traverser is added to each edge in the
graph.
1 gremlin> g.V.count() 2 ==>30962172 3 gremlin> g.E.count() 4 ==>191733800
If the number of traversers at a particular element are required (i.e. a count — above)

as oppposed to the specific traverser instances themselves (and their respective path
histories — below), then the time it takes to compute acombinatorial computation can
scale linearly with the number of MapReduce iterations. The Faunus/Gremlin traversals
below count (not enumerate) the number of 0-, 1-, 2-, 3-, 4-, and 5-step paths in the
DBpedia graph. Note that the runtimes scale linearly at approximately 15 minutes per
traversal step even though the results compound exponentially such that, in the last
example, it is determined that there are 251 quadrillion length 5 paths in the DBpedia
graph.
01 gremlin> g.V.count() // 2.5 minutes 02 ==>30962172 03 gremlin> g.V.out.count() // 17 minutes 04 ==>191733800 05 gremlin> g.V.out.out.count() // 35 minutes 06 ==>27327666320 07 gremlin> g.V.out.out.out.count() // 50 minutes 08 ==>5429258407462 09 gremlin> g.V.out.out.out.out.count() // 70 minutes 10 ==>1148261617434916 11 gremlin> g.V.out.out.out.out.out.count() // 85 minutes 12 ==>251818304970074185
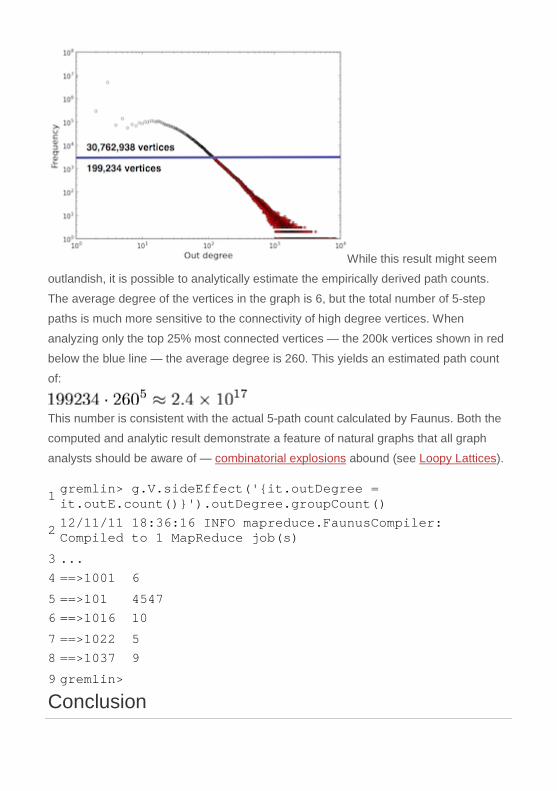
While this result might seem
outlandish, it is possible to analytically estimate the empirically derived path counts.
The average degree of the vertices in the graph is 6, but the total number of 5-step
paths is much more sensitive to the connectivity of high degree vertices. When
analyzing only the top 25% most connected vertices — the 200k vertices shown in red
below the blue line — the average degree is 260. This yields an estimated path count
of:
This number is consistent with the actual 5-path count calculated by Faunus. Both the
computed and analytic result demonstrate a feature of natural graphs that all graph
analysts should be aware of — combinatorial explosions abound (see Loopy Lattices).
1 gremlin> g.V.sideEffect('{it.outDegree = it.outE.count()}').outDegree.groupCount()
2 12/11/11 18:36:16 INFO mapreduce.FaunusCompiler: Compiled to 1 MapReduce job(s) 3 ... 4 ==>1001 6 5 ==>101 4547 6 ==>1016 10 7 ==>1022 5 8 ==>1037 9 9 gremlin> Conclusion
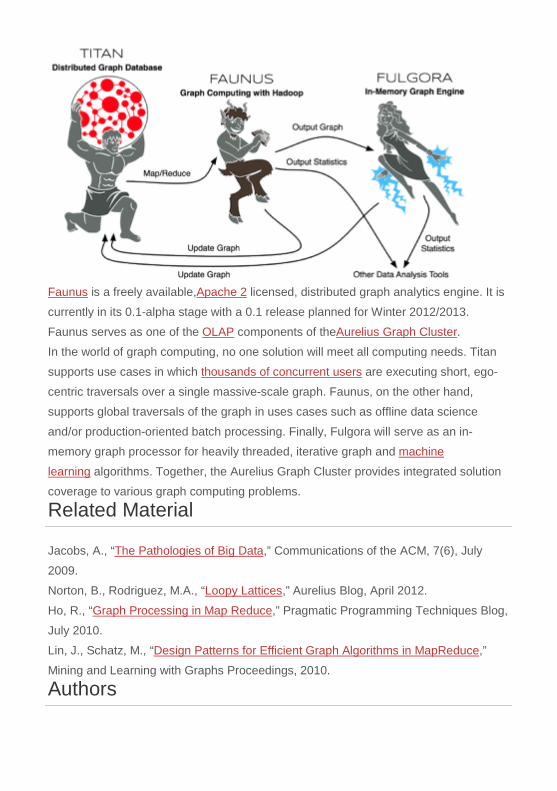
Faunus is a freely available,Apache 2 licensed, distributed graph analytics engine. It is
currently in its 0.1-alpha stage with a 0.1 release planned for Winter 2012/2013.
Faunus serves as one of the OLAP components of theAurelius Graph Cluster.
In the world of graph computing, no one solution will meet all computing needs. Titan
supports use cases in which thousands of concurrent users are executing short, ego-
centric traversals over a single massive-scale graph. Faunus, on the other hand,
supports global traversals of the graph in uses cases such as offline data science
and/or production-oriented batch processing. Finally, Fulgora will serve as an in-
memory graph processor for heavily threaded, iterative graph and machine
learning algorithms. Together, the Aurelius Graph Cluster provides integrated solution
coverage to various graph computing problems.
Related Material
Jacobs, A., “The Pathologies of Big Data,” Communications of the ACM, 7(6), July
2009.
Norton, B., Rodriguez, M.A., “Loopy Lattices,” Aurelius Blog, April 2012.
Ho, R., “Graph Processing in Map Reduce,” Pragmatic Programming Techniques Blog,
July 2010.
Lin, J., Schatz, M., “Design Patterns for Efficient Graph Algorithms in MapReduce,”
Mining and Learning with Graphs Proceedings, 2010.
Authors

FILED UNDER BLOG
A Solution to the Supernode Problem
OCTOBER 25, 2012 3 COMMENTS
In graph theory and network science, a
“supernode” is a vertex with a disproportionately high number of incident edges. While
supernodes are rare in natural graphs (as statistically demonstrated with power-
lawdegree distributions), they show up frequently during graph analysis. The reason
being is that supernodes are connected to so many other vertices that they exist on
numerous paths in the graph. Therefore, an arbitrary traversal is likely to touch a
supernode. In graph computing, supernodes can lead to system performance
problems. Fortunately, forproperty graphs, there is a theoretical and applied solution to
this problem.
Supernodes in the Real-World
Peer-to-Peer File Sharing
At the turn of the millenium, online file sharing was being supported by
services like Napster andGnutella. Unlike Napster, Gnutella is a true peer-to-peer
system in that it has no central file index. Instead, a client’s search is sent to its
adjacent clients. If those clients don’t have the file, then the request propagates to their
adjacent clients, so forth and so on. As in any natural graph, a supernode is only a few
steps away. Therefore, in many peer-to-peer networks, supernode clients are quickly
inundated with search requests and in turn, a DoS is effected. Social Network Celebrities
President Barack Obama currently has 21,322,866 followers on Twitter.
When Obama tweets, that tweet must register in the activity streams of 21+ million
accounts. The Barack Obama vertex is considered a supernode. As an opposing
example, when Stephen Mallette tweets, only 59 streams need to be updated. Twitter
realizes this discrepancy and maintains different mechanisms for handling “the
Obamas” (i.e. the celebrities) and “the Stephens” (i.e. the plebeians) of the Twitter-
sphere.
Blueprints and Vertex Queries
Blueprints is a Java interface for graph-based software.
Various graph databases, in-memory graph engines, and batch-analytics
frameworks make use of Blueprints. In June 2012, Blueprints 2.x was released with
support for “vertex queries.” A vertex query is best explained with an example.
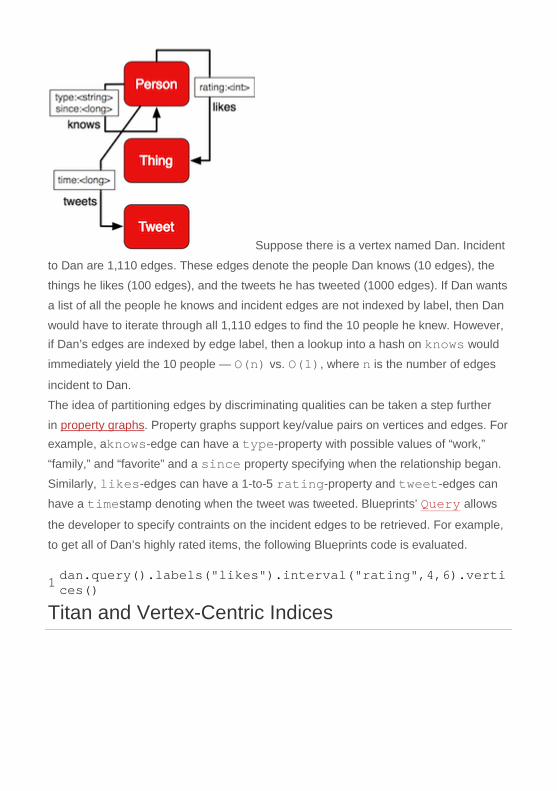
Suppose there is a vertex named Dan. Incident
to Dan are 1,110 edges. These edges denote the people Dan knows (10 edges), the
things he likes (100 edges), and the tweets he has tweeted (1000 edges). If Dan wants
a list of all the people he knows and incident edges are not indexed by label, then Dan
would have to iterate through all 1,110 edges to find the 10 people he knew. However, if Dan’s edges are indexed by edge label, then a lookup into a hash on knows would
immediately yield the 10 people — O(n) vs. O(1), where n is the number of edges
incident to Dan.
The idea of partitioning edges by discriminating qualities can be taken a step further
in property graphs. Property graphs support key/value pairs on vertices and edges. For example, aknows-edge can have a type-property with possible values of “work,”
“family,” and “favorite” and a since property specifying when the relationship began.
Similarly, likes-edges can have a 1-to-5 rating-property and tweet-edges can
have a timestamp denoting when the tweet was tweeted. Blueprints’ Query allows
the developer to specify contraints on the incident edges to be retrieved. For example,
to get all of Dan’s highly rated items, the following Blueprints code is evaluated.
1 dan.query().labels("likes").interval("rating",4,6).vertices() Titan and Vertex-Centric Indices
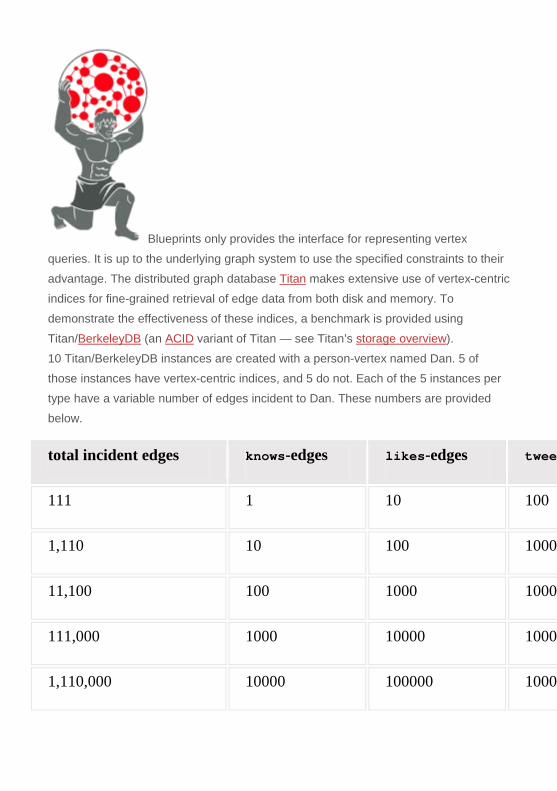
Blueprints only provides the interface for representing vertex
queries. It is up to the underlying graph system to use the specified constraints to their
advantage. The distributed graph database Titan makes extensive use of vertex-centric
indices for fine-grained retrieval of edge data from both disk and memory. To
demonstrate the effectiveness of these indices, a benchmark is provided using
Titan/BerkeleyDB (an ACID variant of Titan — see Titan’s storage overview).
10 Titan/BerkeleyDB instances are created with a person-vertex named Dan. 5 of
those instances have vertex-centric indices, and 5 do not. Each of the 5 instances per
type have a variable number of edges incident to Dan. These numbers are provided
below.
total incident edges knows-edges likes-edges tweet
111 1 10 100
1,110 10 100 1000
11,100 100 1000 10000
111,000 1000 10000 10000
1,110,000 10000 100000 10000
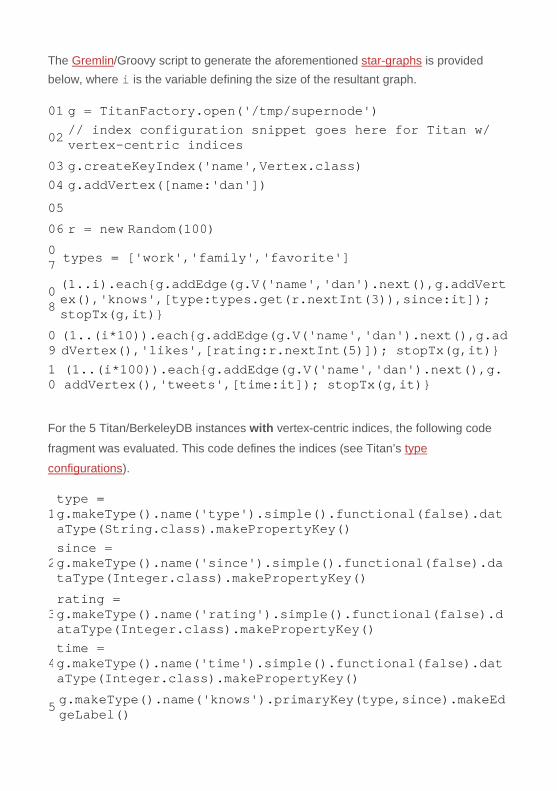
The Gremlin/Groovy script to generate the aforementioned star-graphs is provided below, where i is the variable defining the size of the resultant graph.
01 g = TitanFactory.open('/tmp/supernode')
02 // index configuration snippet goes here for Titan w/ vertex-centric indices 03 g.createKeyIndex('name',Vertex.class) 04 g.addVertex([name:'dan']) 05 06 r = new Random(100) 07 types = ['work','family','favorite']
08 (1..i).each{g.addEdge(g.V('name','dan').next(),g.addVertex(),'knows',[type:types.get(r.nextInt(3)),since:it]); stopTx(g,it)}
09 (1..(i*10)).each{g.addEdge(g.V('name','dan').next(),g.addVertex(),'likes',[rating:r.nextInt(5)]); stopTx(g,it)}
10
(1..(i*100)).each{g.addEdge(g.V('name','dan').next(),g.addVertex(),'tweets',[time:it]); stopTx(g,it)}
For the 5 Titan/BerkeleyDB instances with vertex-centric indices, the following code
fragment was evaluated. This code defines the indices (see Titan’s type
configurations).
1 type = g.makeType().name('type').simple().functional(false).dataType(String.class).makePropertyKey()
2 since = g.makeType().name('since').simple().functional(false).dataType(Integer.class).makePropertyKey()
3 rating = g.makeType().name('rating').simple().functional(false).dataType(Integer.class).makePropertyKey()
4 time = g.makeType().name('time').simple().functional(false).dataType(Integer.class).makePropertyKey()
5 g.makeType().name('knows').primaryKey(type,since).makeEdgeLabel()

6 g.makeType().name('likes').primaryKey(rating).makeEdgeLabel()
7 g.makeType().name('tweets').primaryKey(time).makeEdgeLabel()
Next, three traversals rooted at Dan are presented. The first gets all the people Dan
knows of a particular randomly chosen type (e.g. family members). The second returns
all of the things that Dan has highly rated (i.e. 4 or 5 star ratings). The third retrieves
Dan’s 10 most recent tweets. Finally, note that Gremlin compiles each expression to an
appropriate vertex query (see Gremlin’s traversal optimizations).
1 g.V('name','dan').outE('knows').has('type',types.get(r.nextInt(3)).inV
2 g.V('name','dan').outE('likes').interval('rating',4,6).inV
3 g.V('name','dan').outE('tweets').has('time',T.gt,(i*100)-10).inV
The traversals above were each run 25 times with the database
restarted after each query in order to demonstrate response times with
cold JVM caches. Note that in-memory, warm-cache response times show a similar
pattern (albeit relatively faster). The averaged results are plotted below where the y-
axis is on a log scale. The green, red, and blue colors denote the first, second and third
queries, respectively. Moreover, there is a light and a dark version of each color. The light version is Titan/BerkeleyDB without vertex-centric indices and the dark version is
Titan/BerkeleyDB with vertex-centric indices.

Perhaps the most impressive result is the retrieval of Dan’s 10 most recent tweets
(blue). With vertex-centric indices (dark blue), as the number of Dan’s tweets grow to 1
million, the time it takes to get the top 10 stays constant at around 1.5 milliseconds.
Without indices, this query grows proportionate to the amount of data and ultimately requires 13 seconds to complete (light blue). That is a 4 orders of magnitude difference in response time for the same result set. This example demonstrates
how useful vertex-centric indices are for activity stream-type systems.
The plot on the right
displays the number of vertices returned by each query over each graph size. As
expected, the number of tweets stays constant at 10 while the number
of knows and likes vertices retrieved grows proportionate to the growing graphs.
While the examples on the same graph (with and without indices) return the same
data, getting to that data is faster with vertex-centric indices.
Finally, Titan also supports composite key indices. The graph construction code fragment previous assigns a primary key of both type and since toknows-edges.
Therefore, retrieving Dan’s 10 most recent coworkers is more efficient than, in-memory, getting all of Dan’s coworkers and then sorting on since. The interested
reader can explore the runtimes of such composite vertex-centric queries by
augmenting the provided code snippets.
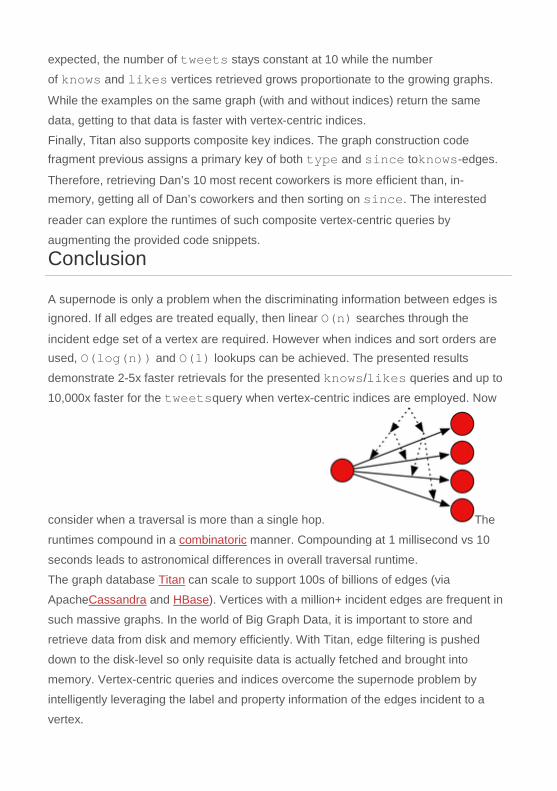
Conclusion
A supernode is only a problem when the discriminating information between edges is ignored. If all edges are treated equally, then linear O(n) searches through the
incident edge set of a vertex are required. However when indices and sort orders are used, O(log(n)) and O(1) lookups can be achieved. The presented results
demonstrate 2-5x faster retrievals for the presented knows/likes queries and up to
10,000x faster for the tweetsquery when vertex-centric indices are employed. Now
consider when a traversal is more than a single hop. The
runtimes compound in a combinatoric manner. Compounding at 1 millisecond vs 10
seconds leads to astronomical differences in overall traversal runtime.
The graph database Titan can scale to support 100s of billions of edges (via
ApacheCassandra and HBase). Vertices with a million+ incident edges are frequent in
such massive graphs. In the world of Big Graph Data, it is important to store and
retrieve data from disk and memory efficiently. With Titan, edge filtering is pushed
down to the disk-level so only requisite data is actually fetched and brought into
memory. Vertex-centric queries and indices overcome the supernode problem by
intelligently leveraging the label and property information of the edges incident to a
vertex.
Related Material
Rodriguez, M.A., Broecheler, M., “Titan: The Rise of Big Graph Data,” Public Lecture at
Jive Software, Palo Alto, 2012.
Broecheler, M., LaRocque, D., Rodriguez, M.A., “Titan Provides Real-Time Big Graph
Data,” Aurelius Blog, August 2012.
Authors
FILED UNDER BLOG
Deploying the Aurelius Graph Cluster
OCTOBER 17, 2012 1 COMMENT
The Aurelius Graph Cluster is a cluster of interoperable graph technologies that can be
deployed on a multi-machine compute cluster. This post demonstrates how to set up
the cluster on Amazon EC2 (a popular cloud service provider) with the following graph
technologies:
Titan is an Apache2-licensed distributed graph database that leverages
existing persistence technologies such as Apache HBase and Cassandra. Titan
implements the Blueprints graph API and therefore supports the Gremlin graph
traversal/query language. [OLTP]

Faunus is an Apache2-licensed batch analytics, graph computing
framework based on ApacheHadoop. Faunus leverages the Blueprints graph API and
exposes Gremlin as its traversal/query language. [OLAP] Please note the date of this publication. There may exist newer versions of the
technologies discussed as well as other deployment techniques. Finally, all commands
point to an example cluster and any use of the commands should be respective of the
specific cluster being computed on.
Cluster Configuration
The examples in this post assume the reader has
access to an Amazon EC2account. The first step is to create a machine instance that
has, at minimum,Java 1.6+ on it. This instance is used to spawn the graph cluster. The name given to this instance is agc-master and it is a modest m1.small machine.
On agc-master, Apache Whirr 0.8.0 is downloaded and unpacked.
1 ~$ ssh [email protected] 2 ...
3 ubuntu@ip-10-117-55-34:~$ wget http://www.apache.org/dist/whirr/whirr-0.8.0/whirr-0.8.0.tar.gz
4 ubuntu@ip-10-117-55-34:~$ tar -xzf whirr-0.8.0.tar.gz
Whirr is a cloud service agnostic tool that simplifies the creation
and destruction of a compute cluster. A Whirr “recipe” (i.e. a properties file) describes
the machines in a cluster and their respective services. The recipe used in this post is

provided below and saved to a text file named agc.properties on agc-master.
The recipe defines a 5 m1.large machine cluster containing HBase 0.94.1 and Hadoop 1.0.3 (see whirr.instance-templates). HBase will serve as the
database persistance engine for Titan and Hadoop will serve as the batch computing
engine for Faunus.
01 whirr.cluster-name=agc
02 whirr.instance-templates=1 zookeeper+hadoop-namenode+hadoop-jobtracker+hbase-master,4 hadoop-datanode+hadoop-tasktracker+hbase-regionserver
03 whirr.provider=aws-ec2 04 whirr.identity=${env:AWS_ACCESS_KEY_ID} 05 whirr.credential=${env:AWS_SECRET_ACCESS_KEY} 06 whirr.hardware-id=m1.large 07 whirr.image-id=us-east-1/ami-da0cf8b3 08 whirr.location-id=us-east-1 09
whirr.hbase.tarball.url=http://archive.apache.org/dist/hbase/hbase-0.94.1/hbase-0.94.1.tar.gz
10
whirr.hadoop.tarball.url=http://archive.apache.org/dist/hadoop/core/hadoop-1.0.3/hadoop-1.0.3.tar.gz
11 hbase-site.dfs.replication=2 From agc-master, the following commands will launch the previously described
cluster. Note that the first two lines require specific Amazon EC2 account information.
When the launch completes, the Amazon EC2 web admin console will show the 5
m1.large machines.
1 ubuntu@ip-10-117-55-34:~$ export AWS_ACCESS_KEY_ID= # requires account specific information
2 ubuntu@ip-10-117-55-34:~$ export AWS_SECRET_ACCESS_KEY= # requires account specific information
3 ubuntu@ip-10-117-55-34:~$ ssh-keygen -t rsa -P ''
4 ubuntu@ip-10-117-55-34:~$ whirr-0.8.0/bin/whirr launch-cluster --config agc.properties

The
deployed cluster is diagrammed on the right where each machine maintains its
respective software services. The sections to follow will demonstrate how to load and
then process graph data within the cluster. Titan will serve as the data source for
Faunus’ batch analytic jobs.
Loading Graph Data into Titan

Titan is a highly scalable, distributed graph database that leverages
existing persistence engines. Titan 0.1.0 supports Apache Cassandra (AP),
Apache HBase (CP), and OracleBerkeleyDB (CA). Each of these backends
emphasizes a different aspect of the CAP theorem. For the purpose of this post,
Apache HBase is utilized and therefore, Titan is consistent (C) and partitioned (P). For the sake of simplicity, the 1 zookeeper+hadoop-namenode+hadoop-
jobtracker+hbase-master machine will be used for cluster interactions. The IP
address can be found in the Whirr instance metadata on agc-master. The reason
for using this machine is that numerous services are already installed on it (e.g.
HBase shell, Hadoop, etc.) and therefore, no manual software installation is required on agc-master.
1 ubuntu@ip-10-117-55-34:~$ more .whirr/agc/instances
2 us-east-1/i-3c121b41 zookeeper,hadoop-namenode,hadoop-jobtracker,hbase-master 54.242.14.83 10.12.27.208
3 us-east-1/i-34121b49 hadoop-datanode,hadoop-tasktracker,hbase-regionserver 184.73.57.182 10.40.23.46
4 us-east-1/i-38121b45 hadoop-datanode,hadoop-tasktracker,hbase-regionserver 54.242.151.125 10.12.119.135
5 us-east-1/i-3a121b47 hadoop-datanode,hadoop-tasktracker,hbase-regionserver 184.73.145.69 10.35.63.206
6 us-east-1/i-3e121b43 hadoop-datanode,hadoop-tasktracker,hbase-regionserver 50.16.174.157 10.224.3.16

Once in the machine via ssh, Titan 0.1.0 is downloaded, unzipped, and
the Gremlin console is started.
01 ubuntu@ip-10-117-55-34:~$ ssh 54.242.14.83 02 ...
03 ubuntu@ip-10-12-27-208:~$ wget https://github.com/downloads/thinkaurelius/titan/titan-0.1.0.zip
04 ubuntu@ip-10-12-27-208:~$ sudo apt-get install unzip 05 ubuntu@ip-10-12-27-208:~$ unzip titan-0.1.0.zip 06 ubuntu@ip-10-12-27-208:~$ cd titan-0.1.0/ 07 ubuntu@ip-10-12-27-208:~/titan-0.1.0$ bin/gremlin.sh 08 09 \,,,/ 10 (o o) 11 -----oOOo-(_)-oOOo----- 12 gremlin>
A toy 1 million vertex/edge graph is loaded into Titan using the Gremlin/Groovy script
below (simply cut-and-paste the source into the Gremlin console and wait
approximately 3 minutes). The code implements a preferential attachment algorithm.
For an explanation of this algorithm, please see the second column of page 33 in Mark Newman‘s article The Structure and Function of Complex Networks.
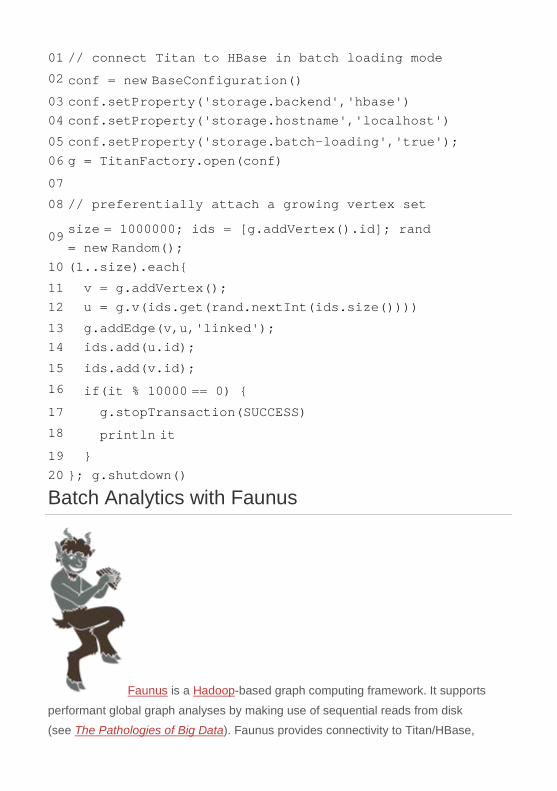
01 // connect Titan to HBase in batch loading mode 02 conf = new BaseConfiguration() 03 conf.setProperty('storage.backend','hbase') 04 conf.setProperty('storage.hostname','localhost') 05 conf.setProperty('storage.batch-loading','true'); 06 g = TitanFactory.open(conf) 07 08 // preferentially attach a growing vertex set
09 size = 1000000; ids = [g.addVertex().id]; rand = new Random();
10 (1..size).each{ 11 v = g.addVertex(); 12 u = g.v(ids.get(rand.nextInt(ids.size()))) 13 g.addEdge(v,u,'linked'); 14 ids.add(u.id); 15 ids.add(v.id); 16 if(it % 10000 == 0) { 17 g.stopTransaction(SUCCESS) 18 println it 19 } 20 }; g.shutdown() Batch Analytics with Faunus
Faunus is a Hadoop-based graph computing framework. It supports
performant global graph analyses by making use of sequential reads from disk (see The Pathologies of Big Data). Faunus provides connectivity to Titan/HBase,

Titan/Cassandra, any Rexster-fronted graph database, and to text/binary files stored in HDFS. From the 1 zookeeper+hadoop-namenode+hadoop-
jobtracker+hbase-master machine, Faunus 0.1-alpha is downloaded and
unzipped. The provided titan-hbase.properties file should be updated
withhbase.zookeeper.quorum=10.12.27.208 instead of localhost. The
IP address 10.12.27.208 is provided by ~/.whirr/agc/instances on agc-
master. Finally, the Gremlin console is started.
01
ubuntu@ip-10-12-27-208:~$ wget https://github.com/downloads/thinkaurelius/faunus/faunus-0.1-alpha.zip
02 ubuntu@ip-10-12-27-208:~$ unzip faunus-0.1-alpha.zip
03 ubuntu@ip-10-12-27-208:~$ cd faunus-0.1-alpha/
04 ubuntu@ip-10-12-27-208:~/faunus-0.1-alpha$ vi bin/titan-hbase.properties
05 ubuntu@ip-10-12-27-208:~/faunus-0.1-alpha$ bin/gremlin.sh
06 07 \,,,/ 08 (o o) 09 -----oOOo-(_)-oOOo----- 10 gremlin>
A few example Faunus jobs are provided below. The final job on line 9 generates an in-
degree distribution. The in-degree of a vertex is defined as the number of incoming
edges to the vertex. The outputted result states how many vertices (second column)
have a particular in-degree (first column). For example, 167,050 vertices have only 1
incoming edge.
01 gremlin> g = FaunusFactory.open('bin/titan-hbase.properties') 02 ==>faunusgraph[titanhbaseinputformat] 03 gremlin> g.V.count() // how many vertices in the graph? 04 ==>1000001 05 gremlin> g.E.count() // how many edges in the graph?
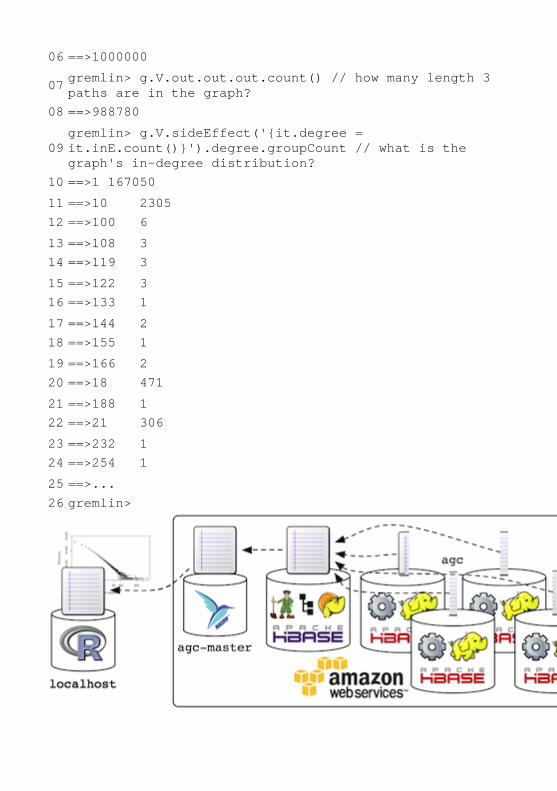
06 ==>1000000
07 gremlin> g.V.out.out.out.count() // how many length 3 paths are in the graph? 08 ==>988780
09 gremlin> g.V.sideEffect('{it.degree = it.inE.count()}').degree.groupCount // what is the graph's in-degree distribution?
10 ==>1 167050 11 ==>10 2305 12 ==>100 6 13 ==>108 3 14 ==>119 3 15 ==>122 3 16 ==>133 1 17 ==>144 2 18 ==>155 1 19 ==>166 2 20 ==>18 471 21 ==>188 1 22 ==>21 306 23 ==>232 1 24 ==>254 1 25 ==>... 26 gremlin>

To conclude, the in-degree distribution result is pulled from Hadoop’s HDFS (stored in output/job-0). Next, scp is used to download the file to agc-master and
then again to download the file to a local machine (e.g. a laptop). If the local machine
has R installed, then the file can be plotted and visualized (see the final diagram
below). The log-logplot demonstrates the known result that the preferential attachment
algorithm generates a graph with a power-lawdegree distribution (i.e. “natural
statistics”).
01 ubuntu@ip-10-12-27-208:~$ hadoop fs -getmerge output/job-0 distribution.txt 02 ubuntu@ip-10-12-27-208:~$ head -n5 distribution.txt 03 1 167050 04 10 2305 05 100 6 06 108 3 07 119 3 08 ubuntu@ip-10-12-27-208:~$ exit 09 ...
10 ubuntu@ip-10-117-55-34:~$ scp 54.242.14.83:~/distribution.txt . 11 ubuntu@ip-10-117-55-34:~$ exit 12 ...
13 ~$ scp [email protected]:~/distribution.txt . 14 ~$ r 15 > t = read.table('distribution.txt') 16 > plot(t,log='xy',xlab='in-degree',ylab='frequency')

Conclusion
The Aurelius Graph Cluster is used for processing massive-scale graphs, where massive-scale denotes a graph so large it does not fit within the resource
confines of a single machine. In other words, the Aurelius Graph Cluster is all about
Big Graph Data. The two cluster technologies explored in this post
were Titan and Faunus. They serve two distinct graph computing needs. Titan supports
thousands of concurrent real-time, topologically local graph interactions. Faunus, on
the other hand, supports long running, topologically global graph analyses. In other
words, they provide OLTP and OLAP functionality, respectively.
References
London, G., “Set Up a Hadoop/HBase Cluster on EC2 in (About) an Hour,” Cloudera
Developer Center, October 2012.
Newman, M., “The Structure and Function of Complex Networks,” SIAM Review,
volume 45, pages 167-256, 2003.
Jacobs, A., “The Pathologies of Big Data,” ACM Communications, volume 7, number 6,
July 2009.
Authors

FILED UNDER BLOG
Titan Provides Real-Time Big Graph Data
AUGUST 6, 2012 6 COMMENTS
Titan is an Apache 2 licensed, distributed graph
database capable of supporting tens of thousands of concurrent users reading and
writing to a single massive-scalegraph. In order to substantiate the aforementioned
statement, this post presents empirical results of Titan backing a simulated social
networking site undergoing transactional loads estimated at 50,000–100,000
concurrent users. These users are interacting with 40 m1.small Amazon EC2 servers
which are transacting with a 6 machine Amazon EC2 cc1.4xl Titan/Cassandra cluster.
The presentation to follow discusses the simulation’s social graph structure, the types
of processes executed on that structure, and the various runtime analyses of those
processes under normal and peak load. The presentation concludes with a discussion
of the Amazon EC2 cluster architecture used and the associated costs of running that
architecture in a production environment. In short summary, Titan performs well under
substantial load with a relatively inexpensive cluster and as such, is capable of backing
online services requiring real-time Big Graph Data.
The Social Graph’s Structure and Processes
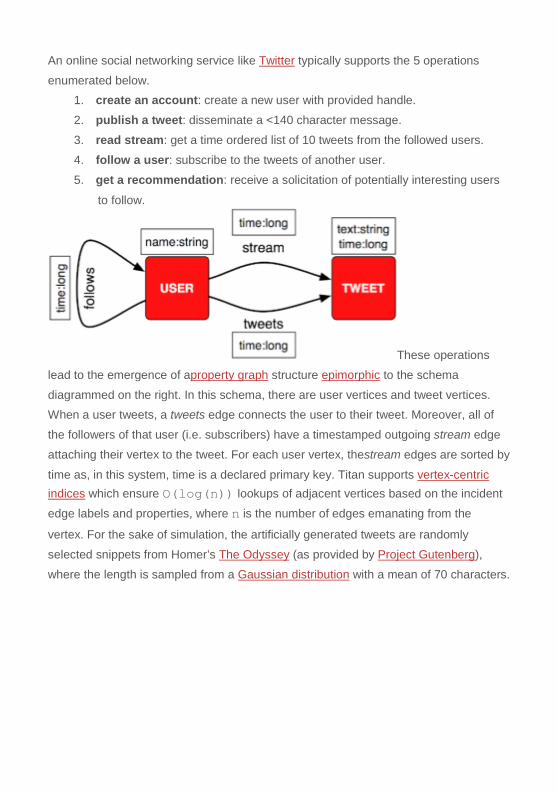
An online social networking service like Twitter typically supports the 5 operations
enumerated below. 1. create an account: create a new user with provided handle.
2. publish a tweet: disseminate a <140 character message.
3. read stream: get a time ordered list of 10 tweets from the followed users.
4. follow a user: subscribe to the tweets of another user.
5. get a recommendation: receive a solicitation of potentially interesting users
to follow.
These operations
lead to the emergence of aproperty graph structure epimorphic to the schema
diagrammed on the right. In this schema, there are user vertices and tweet vertices. When a user tweets, a tweets edge connects the user to their tweet. Moreover, all of
the followers of that user (i.e. subscribers) have a timestamped outgoing stream edge
attaching their vertex to the tweet. For each user vertex, thestream edges are sorted by
time as, in this system, time is a declared primary key. Titan supports vertex-centric indices which ensure O(log(n)) lookups of adjacent vertices based on the incident
edge labels and properties, where n is the number of edges emanating from the
vertex. For the sake of simulation, the artificially generated tweets are randomly
selected snippets from Homer’s The Odyssey (as provided by Project Gutenberg),
where the length is sampled from a Gaussian distribution with a mean of 70 characters.

To provide a foundational
layer of data, the Twitter graph as of 2009 was first loaded into the Titan cluster. This
data includes 41.7 million user vertices and 1.47 billion follows edges. After loading, the 40 m1.small machines are put into a “while(true)loop” (in fact, there are 10
concurrent threads on each worker running 125,000 iterations). During each iteration of
the loop, a worker selects an operation to enact using a biased coin toss (see the
diagram on the left). The distribution heavily favors stream reading as this is typically
the most prevalent operation in such online social systems. Next, if
arecommendation is provided, then there is a 30% chance that the user will follow one of the recommended users. This is how follows edges are added to the graph.
A follows recommendation (e.g. “who to follow“) makes use of the existing follows edges to determine, for a particular user, other users that they might
find interesting. Typically, some variant of a triangle closure is computed in such situations. In plain English, if the users that user A follows tend to follow user B, then it
is most likely that user B is a good user for user Ato follow. To capture this notion as a
real-time graph algorithm, the Gremlin graph traversal language is used.
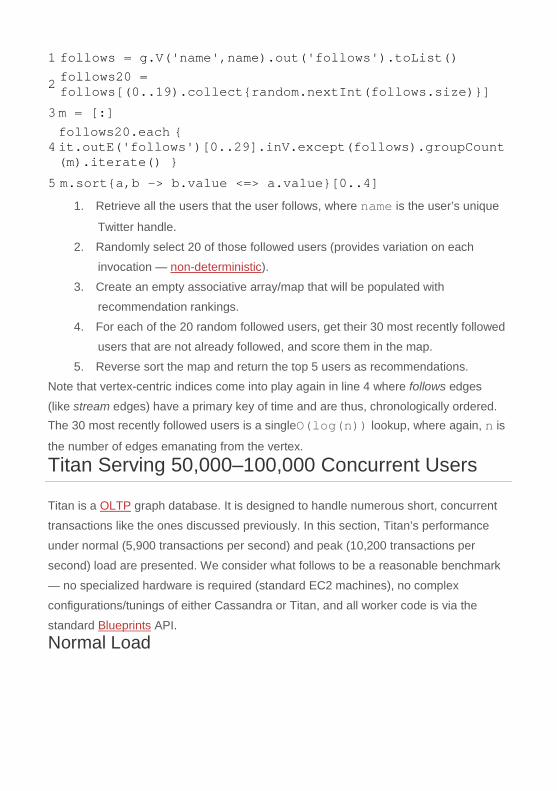
1 follows = g.V('name',name).out('follows').toList()
2 follows20 = follows[(0..19).collect{random.nextInt(follows.size)}]
3 m = [:]
4 follows20.each { it.outE('follows')[0..29].inV.except(follows).groupCount(m).iterate() }
5 m.sort{a,b -> b.value <=> a.value}[0..4] 1. Retrieve all the users that the user follows, where name is the user’s unique
Twitter handle.
2. Randomly select 20 of those followed users (provides variation on each
invocation — non-deterministic).
3. Create an empty associative array/map that will be populated with
recommendation rankings.
4. For each of the 20 random followed users, get their 30 most recently followed
users that are not already followed, and score them in the map.
5. Reverse sort the map and return the top 5 users as recommendations. Note that vertex-centric indices come into play again in line 4 where follows edges
(like stream edges) have a primary key of time and are thus, chronologically ordered. The 30 most recently followed users is a singleO(log(n)) lookup, where again, n is
the number of edges emanating from the vertex.
Titan Serving 50,000–100,000 Concurrent Users
Titan is a OLTP graph database. It is designed to handle numerous short, concurrent
transactions like the ones discussed previously. In this section, Titan’s performance
under normal (5,900 transactions per second) and peak (10,200 transactions per
second) load are presented. We consider what follows to be a reasonable benchmark
— no specialized hardware is required (standard EC2 machines), no complex
configurations/tunings of either Cassandra or Titan, and all worker code is via the
standard Blueprints API. Normal Load
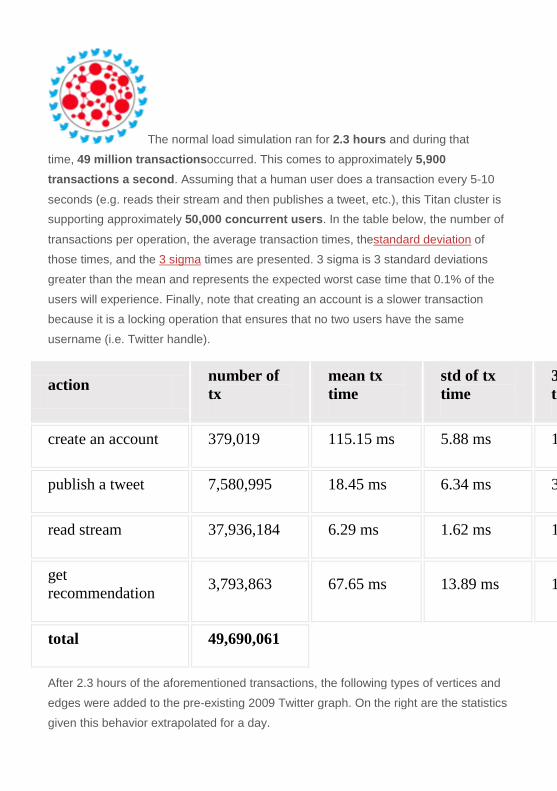
The normal load simulation ran for 2.3 hours and during that
time, 49 million transactionsoccurred. This comes to approximately 5,900 transactions a second. Assuming that a human user does a transaction every 5-10
seconds (e.g. reads their stream and then publishes a tweet, etc.), this Titan cluster is supporting approximately 50,000 concurrent users. In the table below, the number of
transactions per operation, the average transaction times, thestandard deviation of
those times, and the 3 sigma times are presented. 3 sigma is 3 standard deviations
greater than the mean and represents the expected worst case time that 0.1% of the
users will experience. Finally, note that creating an account is a slower transaction
because it is a locking operation that ensures that no two users have the same
username (i.e. Twitter handle).
action number of tx
mean tx time
std of tx time
3 ti
create an account 379,019 115.15 ms 5.88 ms 1
publish a tweet 7,580,995 18.45 ms 6.34 ms 3
read stream 37,936,184 6.29 ms 1.62 ms 1
get recommendation 3,793,863 67.65 ms 13.89 ms 1
total 49,690,061
After 2.3 hours of the aforementioned transactions, the following types of vertices and
edges were added to the pre-existing 2009 Twitter graph. On the right are the statistics
given this behavior extrapolated for a day.
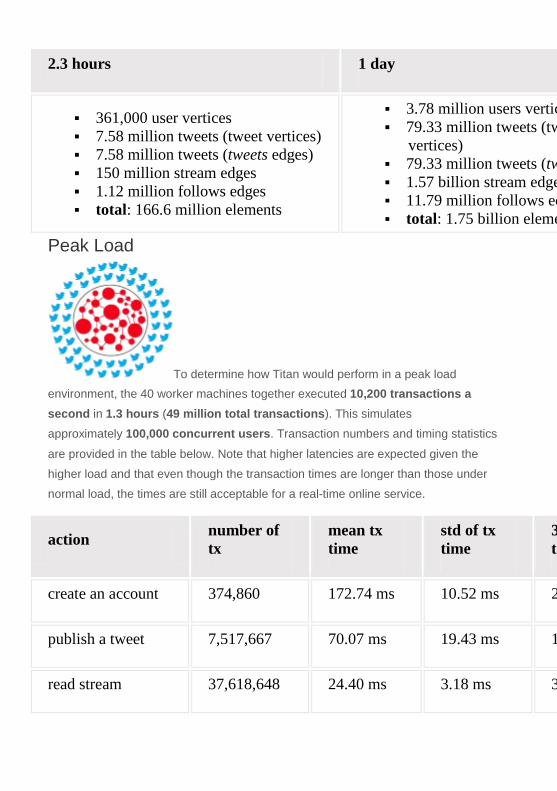
2.3 hours 1 day
361,000 user vertices 7.58 million tweets (tweet vertices) 7.58 million tweets (tweets edges) 150 million stream edges 1.12 million follows edges total: 166.6 million elements
3.78 million users vertic 79.33 million tweets (tw
vertices) 79.33 million tweets (tw 1.57 billion stream edge 11.79 million follows ed total: 1.75 billion eleme
Peak Load
To determine how Titan would perform in a peak load environment, the 40 worker machines together executed 10,200 transactions a second in 1.3 hours (49 million total transactions). This simulates
approximately 100,000 concurrent users. Transaction numbers and timing statistics
are provided in the table below. Note that higher latencies are expected given the
higher load and that even though the transaction times are longer than those under
normal load, the times are still acceptable for a real-time online service.
action number of tx
mean tx time
std of tx time
3 ti
create an account 374,860 172.74 ms 10.52 ms 2
publish a tweet 7,517,667 70.07 ms 19.43 ms 1
read stream 37,618,648 24.40 ms 3.18 ms 3

get recommendation 3,758,266 229.83 ms 29.08 ms 3
total 49,269,441
Amazon EC2 Machinery and Costs
The simulation presented was executed
on Amazon EC2. The software infrastructure to run this simulation made use
of CloudFormation. In terms of the hardware infrastructure, this section discusses
theinstance types, their physical statistics during the experiment, and the cost of
running this architecture in a production environment.
The 40 workers were m1.small Amazon EC2 instances (1.7 GB of memory with 1
virtual core). The Titan/Cassandra cluster was composed of 6 machines each with the
following specification.
23 GB of memory
33.5 EC2 Compute Units (2 x Intel Xeon X5570, quad-core “Nehalem”
architecture)
1,690 GB of storage
64-bit platform
10 Gigabit Ethernet
EC2 API name: cc1.4xlarge
Under the normal load simulation, the 6 machine Titan cluster experienced the
following CPU utilization, disk reads (in bytes), and disk writes (in bytes) — each
colored line represents 1 of the 6 cc1.4xlarge machines. Note that the disk read chart
is a 1 hour snapshot during the middle of the experiment and therefore, the caches are
warm. In summary, Titan is able to consistently, and without exertion, maintain the
normal transactional load.

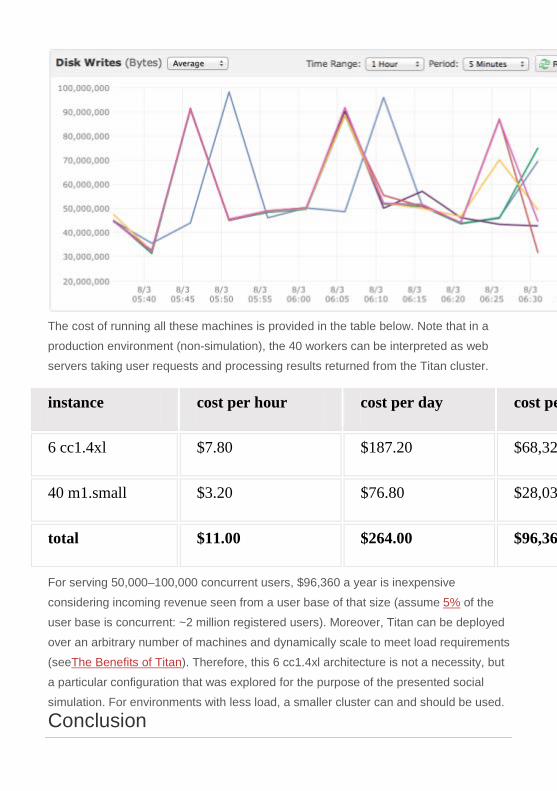
The cost of running all these machines is provided in the table below. Note that in a
production environment (non-simulation), the 40 workers can be interpreted as web
servers taking user requests and processing results returned from the Titan cluster.
instance cost per hour cost per day cost pe
6 cc1.4xl $7.80 $187.20 $68,32
40 m1.small $3.20 $76.80 $28,03
total $11.00 $264.00 $96,36
For serving 50,000–100,000 concurrent users, $96,360 a year is inexpensive
considering incoming revenue seen from a user base of that size (assume 5% of the
user base is concurrent: ~2 million registered users). Moreover, Titan can be deployed
over an arbitrary number of machines and dynamically scale to meet load requirements
(seeThe Benefits of Titan). Therefore, this 6 cc1.4xl architecture is not a necessity, but
a particular configuration that was explored for the purpose of the presented social
simulation. For environments with less load, a smaller cluster can and should be used.
Conclusion
Titan has been in research and development for the past 4 years. In Spring 2012, Titan
was made freely available by Aurelius under the liberal Apache 2 license. It is currently
distributed as a 0.1-alpha with a 0.1 release planned by the end of Summer 2012.
Note that Titan is but one piece of the larger graph puzzle.
Titan serves the OLTPaspect of graph processing. By the middle of Fall 2012, Aurelius
will release a collection of OLAP graph technologies to support global graph
processing and analytics. All of the Aurelius technologies will integrate with one
another as well as with the suite of open source, BSD licensed graph technologies
provided byTinkerPop. By standing on the shoulders of giants (e.g. Cassandra,
TinkerPop, Amazon EC2), great leaps and bounds in applied graph theory and network
scienceare possible.
References
Kwak, H., Lee, C., Park, H., Moon, S., “What is Twitter, a Social Network or a News
Media?,” World Wide Web Conference, 2010.
Rodriguez, M.A., Broecheler, M., “Titan: The Rise of Big Graph Data,” Public Lecture at
Jive Software, Palo Alto, 2012.
Broecheler, M., LaRocque, D., Rodriguez, M.A., “Titan: A Highly Scalable, Distributed
Graph Database,” GraphLab Workshop 2012, San Francisco, 2012.
Authors
FILED UNDER BLOG
Structural Abstractions in Brains and Graphs
MAY 8, 2012 6 COMMENTS
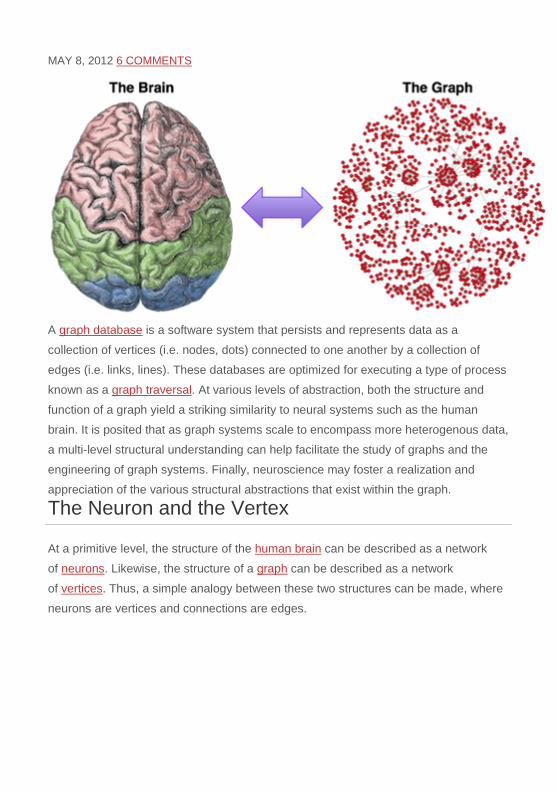
A graph database is a software system that persists and represents data as a
collection of vertices (i.e. nodes, dots) connected to one another by a collection of
edges (i.e. links, lines). These databases are optimized for executing a type of process
known as a graph traversal. At various levels of abstraction, both the structure and
function of a graph yield a striking similarity to neural systems such as the human
brain. It is posited that as graph systems scale to encompass more heterogenous data,
a multi-level structural understanding can help facilitate the study of graphs and the
engineering of graph systems. Finally, neuroscience may foster a realization and
appreciation of the various structural abstractions that exist within the graph.
The Neuron and the Vertex
At a primitive level, the structure of the human brain can be described as a network
of neurons. Likewise, the structure of a graph can be described as a network
of vertices. Thus, a simple analogy between these two structures can be made, where
neurons are vertices and connections are edges.

The human brain is believed to be composed of approximately 100 billion neurons and
1 quadrillion connections (1 quadrillion is 1000 trillion). If the human brain was only
understood at the level of neurons, then the brain would be too complex to reason
about. Similarly, if a graph of 100 billion interconnected vertices was only studied from
the vantage point of vertices and edges, then the structure would be too overwhelming
to grasp. To combat this problem, in both cognitive neuroscience and network science,
it is typical to abstract away the low-level connectivity patterns in order to realize larger
functional structures. In neuroscience, some techniques used to do this are itemized
below. Neurons: Invasive microelectrodes can be used to measure the activity of a
single neuron (or small group of neurons) during the presentation of a
stimulus. Areas: Staining allows researchers to identify the metabolic
enzyme cytochrome oxidase and thus expose larger circuits participating in
the processing of sensory input. Regions: Non-invasive fMRI techniques leverage the magnetic aspects
of hemoglobin which is utilized by areas of the brain during a cognitive task or
presentation of stimuli.
In network science, algorithms exist to identify larger structures within the graph. Most
of the descriptive statistical algorithms developed are used for this purpose. Some of
these techniques are itemized below. Vertices: Measuring degree or centrality scores help to identify a vertex’s role
within the larger graph. Motifs: It is possible to identify lines, trees, cycles, cliques, etc. which are
associated with known functions.
Subgraphs: Leveraging community detection algorithms or graph minors help
to locate large structural areas within the graph that have high intra-
connectivity and low inter-connectivity.
In general, in order to have a well-rounded understanding of either the brain or the
graph, abstractions over its structure are required.
The Area and the Motif
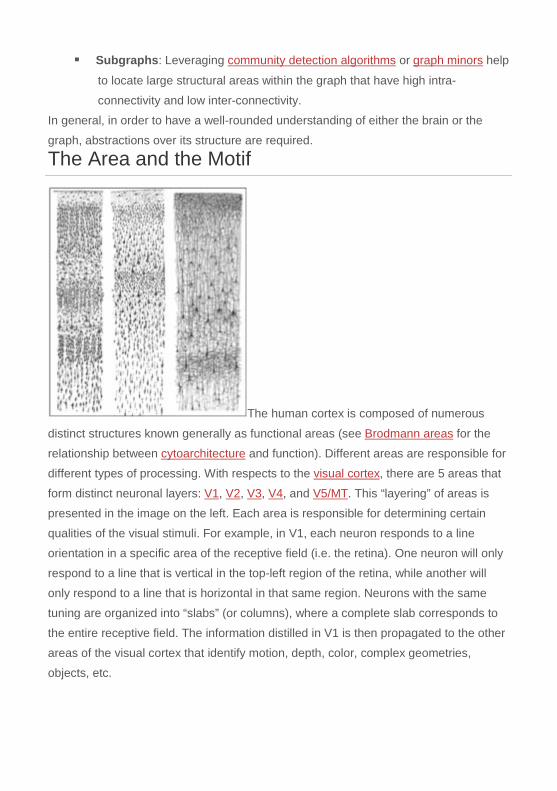
The human cortex is composed of numerous
distinct structures known generally as functional areas (see Brodmann areas for the
relationship between cytoarchitecture and function). Different areas are responsible for
different types of processing. With respects to the visual cortex, there are 5 areas that
form distinct neuronal layers: V1, V2, V3, V4, and V5/MT. This “layering” of areas is
presented in the image on the left. Each area is responsible for determining certain
qualities of the visual stimuli. For example, in V1, each neuron responds to a line
orientation in a specific area of the receptive field (i.e. the retina). One neuron will only
respond to a line that is vertical in the top-left region of the retina, while another will
only respond to a line that is horizontal in that same region. Neurons with the same
tuning are organized into “slabs” (or columns), where a complete slab corresponds to
the entire receptive field. The information distilled in V1 is then propagated to the other
areas of the visual cortex that identify motion, depth, color, complex geometries,
objects, etc.

In analogy to the brain’s functional areas, functional motifs can be identified in real-
world graphs. Motifs are prevalent in a type of graph known as a multi-relational graph.
A multi-relational graph is composed of a set of heterogenous vertices (e.g. people,
webpages, categories) and a set of directed labeled edges (e.g. friend, wrote, read,
broader). The Wikipedia graph, made freely available by DBPedia, is an excellent
example of a multi-relational graph containing numerous motifs. In particular,
a taxonomical motif is found in its category system (note that the Wikipedia category
system is not a directed acyclic graph). In this taxonomy, there are high-level categories such ascognition (the red vertices). Cognition is refined by more
specific categories: intelligence, reasoning,perception, etc. Ultimately, at
the lowest-level, Wikipedia pages (the purple vertices) have subject-edges
projecting to the vertices in the taxonomy that best represent them (typically to
categories lower in the taxonomy). Similar to how sensory input stimulates the
functional areas of the visual cortex, Wikipedia’s taxonomy can be stimulated by user usage. For example, a Wikipedia user (the green vertex) may click on the human
intelligencepage at timestep 1. The general context/intention of the user’s click
is ambiguous as human intelligence is the source of numerous paths within the
taxonomy — there is simply not enough information to get a specific understanding of
the user’s knowledge acquisition desire (creativity? reasoning? perception?). The most general understanding is that the user is interested in cognition. However, as the
user clicks on more pages (e.g. visual system, visual cortex), the graph is
able to “realize” that the user is interested in the more neuroscience aspects of
cognition — more specifically, as it relates to humans. The graph processes the click-
stream behavior of the user in order to converge upon a category (or set of categories)
that best represents that user’s information searching behavior. Note that Wikipedia
does not leverage this algorithm as it is primarily a static representational structure.
However, in order to draw an analogy to signal processing in the brain, this usage
example was presented.
The Region and the Subgraph
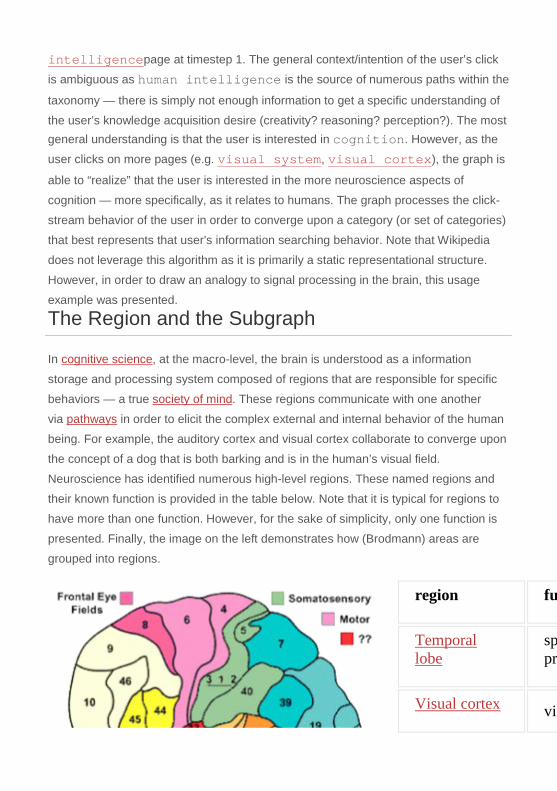
In cognitive science, at the macro-level, the brain is understood as a information
storage and processing system composed of regions that are responsible for specific
behaviors — a true society of mind. These regions communicate with one another
via pathways in order to elicit the complex external and internal behavior of the human
being. For example, the auditory cortex and visual cortex collaborate to converge upon
the concept of a dog that is both barking and is in the human’s visual field.
Neuroscience has identified numerous high-level regions. These named regions and
their known function is provided in the table below. Note that it is typical for regions to
have more than one function. However, for the sake of simplicity, only one function is
presented. Finally, the image on the left demonstrates how (Brodmann) areas are
grouped into regions.
region fu
Temporal lobe
sp pro
Visual cortex vis
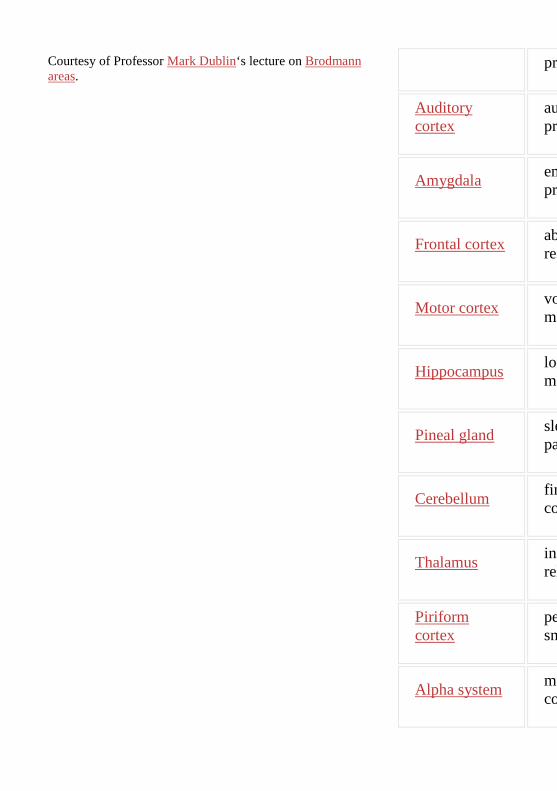
Courtesy of Professor Mark Dublin‘s lecture on Brodmann areas.
pro
Auditory cortex
au pro
Amygdala
em pro
Frontal cortex
ab rea
Motor cortex
vo mo
Hippocampus
lon me
Pineal gland
sle pa
Cerebellum
fin co
Thalamus
inf rel
Piriform cortex
pe sm
Alpha system
mu co
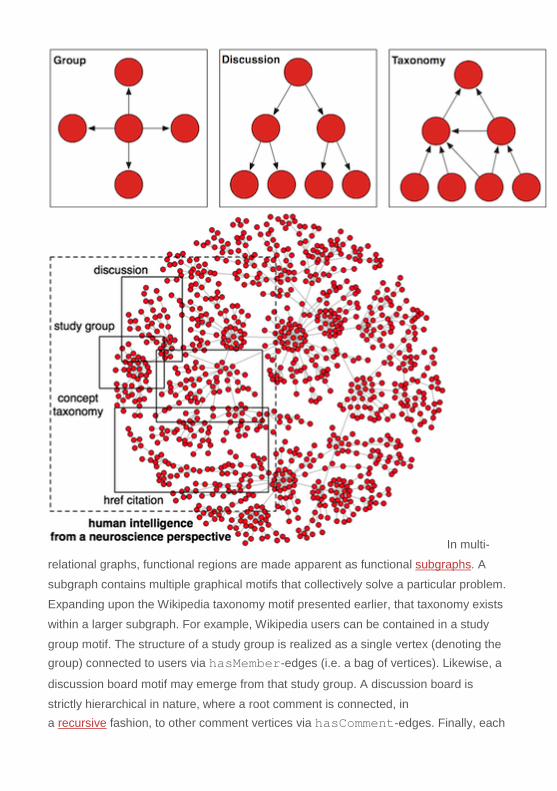
In multi-
relational graphs, functional regions are made apparent as functional subgraphs. A
subgraph contains multiple graphical motifs that collectively solve a particular problem.
Expanding upon the Wikipedia taxonomy motif presented earlier, that taxonomy exists
within a larger subgraph. For example, Wikipedia users can be contained in a study
group motif. The structure of a study group is realized as a single vertex (denoting the group) connected to users via hasMember-edges (i.e. a bag of vertices). Likewise, a
discussion board motif may emerge from that study group. A discussion board is
strictly hierarchical in nature, where a root comment is connected, in a recursive fashion, to other comment vertices via hasComment-edges. Finally, each
of those comments may have projections/links to Wikipedia pages or categories that
expand on the ideas presented in the comment. The aggregation of these motifs form a
functional subgraph whose purpose is to understand human intelligence from a
neuroscience perspective.
Conclusion
This post presented three structural abstractions found in human brains and in multi-
relational graphs. The purpose of structural abstraction is to aid researchers and
engineers in the understanding and design of complex systems. The graph database
space is developing infrastructure capable of representing and processing a variegated
information landscape within a single, unified, atomic graph structure. As this proceeds,
it will become more important to think in terms of structural abstractions in order to
better reason about the graph and to develop algorithms that are better able to
leverage it for collective problem-solving. In many ways, this is analogous to how the
human brain’s structures and processes are leveraged for individual problem-solving.
Acknowledgement
The images that are not directly referenced were provided by Wikipedia or generated
by the author.
References
Radomski, M., “Human Brain Capacity in Terabytes,” Mark Radomski’s WordPress
Blog, May 2008.
Best, B., “Basic Cerebral Cortex Function with Emphasis on Vision,” The Anatomical
Basis of Mind, 2004.
Rodriguez, M.A., “Graphs, Brains, and Gremlin,” Marko A. Rodriguez’s WordPress
Blog, July 2011.
Bollen, J., Van de Sompel, H., Hagberg, A., Bettencourt, L.M.A, Chute, R., Rodriguez,
M.A., Balakireva, L.L., “Clickstream Data Yields High-Resolution Maps of Science,”
PLoS One, Public Library of Science, 4(3), e4803, 2009.
Rodriguez, M.A., Ham, M.I., Gintautas, V., Kunsberg, B.S., “A Prospectus on the
Obstacles Inhibiting the Implementation of Advanced Artificial Neural Systems – Part
1,” Decade of Mind IV Conference, Albuquerque, New Mexico, January 2009.
Ham, M.I., Gintautas, V., Rodriguez, M.A., Bennett, R.A., Santa Maria, C.L.,
Bettencourt, L.M.A., “Density-Dependence of Functional Development in Spiking
Cortical Networks Grown in Vitro,” Biological Cybernetics, 102(1), pp. 71-80, March
2010.
Rodriguez, M.A., “From the Signal to the Symbol: Structure and Process in Artificial
Intelligence,” PostDoctoral Public Lecture at the Center for Nonlinear Studies, Los
Alamos National Laboratory, November 2008.
Minsky, M., “Society of Mind,” Simon & Schuster Press, March 1988.
Heylighen, F., “Collective Intelligence and its Implementation on the Web,” Journal of
Computational and Mathematical Organization Theory, 5(3), October 1999.
Author
FILED UNDER BLOG
Loopy Lattices
APRIL 21, 2012 2 COMMENTS
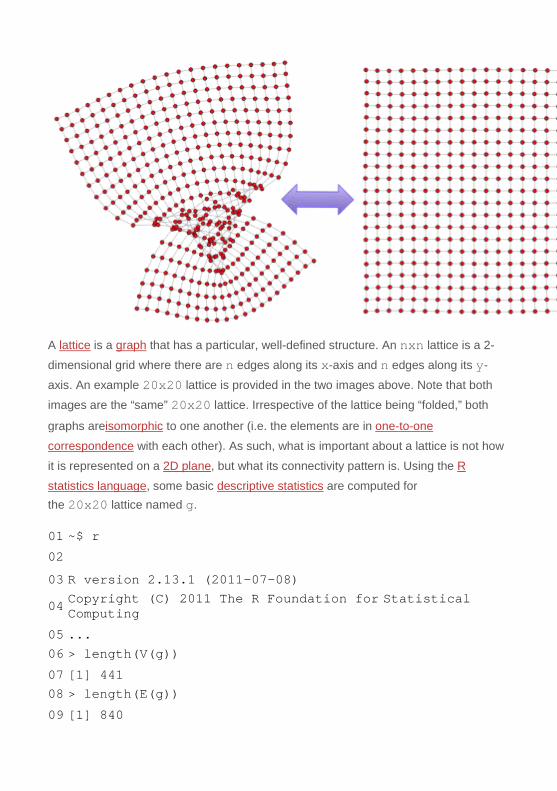
A lattice is a graph that has a particular, well-defined structure. An nxn lattice is a 2-
dimensional grid where there are n edges along its x-axis and n edges along its y-
axis. An example 20x20 lattice is provided in the two images above. Note that both
images are the “same” 20x20 lattice. Irrespective of the lattice being “folded,” both
graphs areisomorphic to one another (i.e. the elements are in one-to-one
correspondence with each other). As such, what is important about a lattice is not how
it is represented on a 2D plane, but what its connectivity pattern is. Using the R
statistics language, some basic descriptive statistics are computed for the 20x20 lattice named g.
01 ~$ r 02 03 R version 2.13.1 (2011-07-08)
04 Copyright (C) 2011 The R Foundation for Statistical Computing
05 ... 06 > length(V(g)) 07 [1] 441 08 > length(E(g)) 09 [1] 840
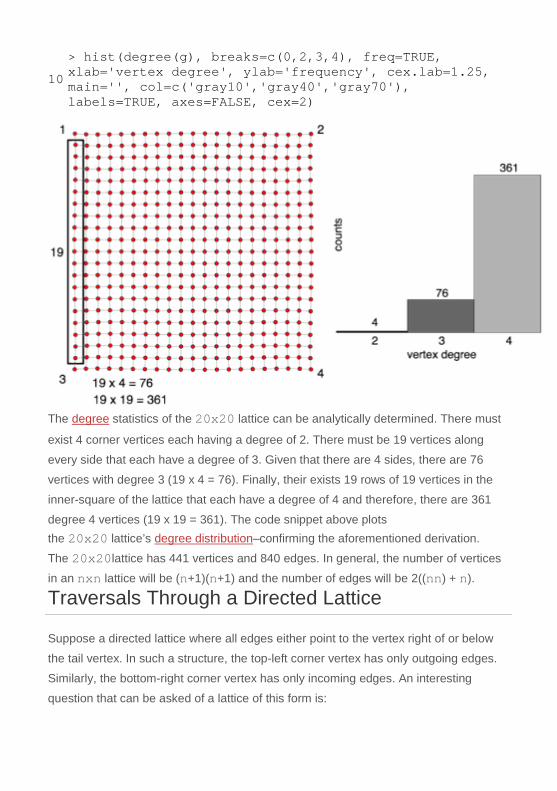
10 > hist(degree(g), breaks=c(0,2,3,4), freq=TRUE, xlab='vertex degree', ylab='frequency', cex.lab=1.25, main='', col=c('gray10','gray40','gray70'), labels=TRUE, axes=FALSE, cex=2)
The degree statistics of the 20x20 lattice can be analytically determined. There must
exist 4 corner vertices each having a degree of 2. There must be 19 vertices along
every side that each have a degree of 3. Given that there are 4 sides, there are 76
vertices with degree 3 (19 x 4 = 76). Finally, their exists 19 rows of 19 vertices in the
inner-square of the lattice that each have a degree of 4 and therefore, there are 361
degree 4 vertices (19 x 19 = 361). The code snippet above plots the 20x20 lattice’s degree distribution–confirming the aforementioned derivation.
The 20x20lattice has 441 vertices and 840 edges. In general, the number of vertices
in an nxn lattice will be (n+1)(n+1) and the number of edges will be 2((nn) + n).
Traversals Through a Directed Lattice
Suppose a directed lattice where all edges either point to the vertex right of or below
the tail vertex. In such a structure, the top-left corner vertex has only outgoing edges.
Similarly, the bottom-right corner vertex has only incoming edges. An interesting
question that can be asked of a lattice of this form is:
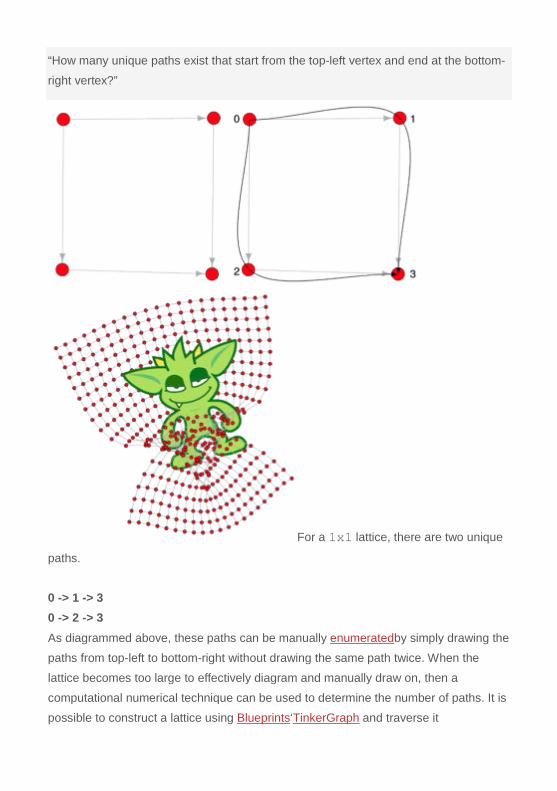
“How many unique paths exist that start from the top-left vertex and end at the bottom-
right vertex?”
For a 1x1 lattice, there are two unique
paths.
0 -> 1 -> 3
0 -> 2 -> 3
As diagrammed above, these paths can be manually enumeratedby simply drawing the
paths from top-left to bottom-right without drawing the same path twice. When the
lattice becomes too large to effectively diagram and manually draw on, then a
computational numerical technique can be used to determine the number of paths. It is
possible to construct a lattice using Blueprints‘TinkerGraph and traverse it
using Gremlin. In order to do this for a lattice of any size (any n), a function is defined
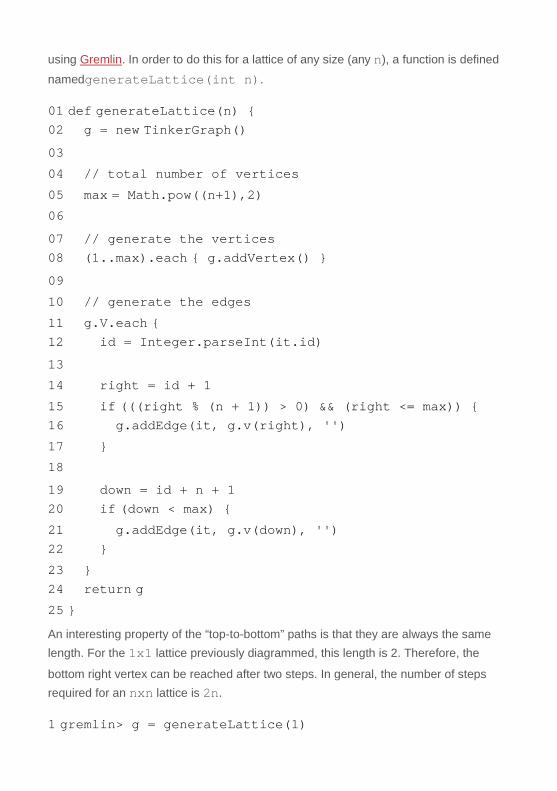
namedgenerateLattice(int n).
01 def generateLattice(n) { 02 g = new TinkerGraph() 03 04 // total number of vertices 05 max = Math.pow((n+1),2) 06 07 // generate the vertices 08 (1..max).each { g.addVertex() } 09 10 // generate the edges 11 g.V.each { 12 id = Integer.parseInt(it.id) 13 14 right = id + 1 15 if (((right % (n + 1)) > 0) && (right <= max)) { 16 g.addEdge(it, g.v(right), '') 17 } 18 19 down = id + n + 1 20 if (down < max) { 21 g.addEdge(it, g.v(down), '') 22 } 23 } 24 return g 25 } An interesting property of the “top-to-bottom” paths is that they are always the same length. For the 1x1 lattice previously diagrammed, this length is 2. Therefore, the
bottom right vertex can be reached after two steps. In general, the number of steps required for an nxn lattice is 2n.
1 gremlin> g = generateLattice(1)
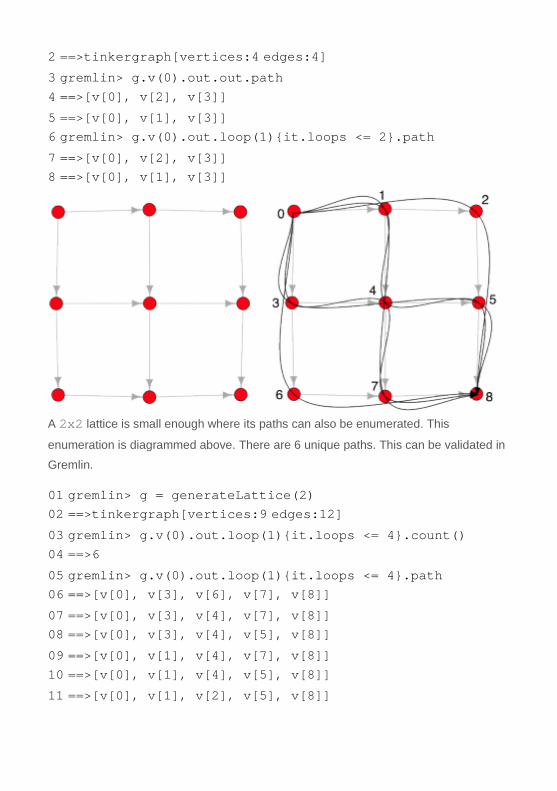
2 ==>tinkergraph[vertices:4 edges:4] 3 gremlin> g.v(0).out.out.path 4 ==>[v[0], v[2], v[3]] 5 ==>[v[0], v[1], v[3]] 6 gremlin> g.v(0).out.loop(1){it.loops <= 2}.path 7 ==>[v[0], v[2], v[3]] 8 ==>[v[0], v[1], v[3]]
A 2x2 lattice is small enough where its paths can also be enumerated. This
enumeration is diagrammed above. There are 6 unique paths. This can be validated in
Gremlin.
01 gremlin> g = generateLattice(2) 02 ==>tinkergraph[vertices:9 edges:12] 03 gremlin> g.v(0).out.loop(1){it.loops <= 4}.count() 04 ==>6 05 gremlin> g.v(0).out.loop(1){it.loops <= 4}.path 06 ==>[v[0], v[3], v[6], v[7], v[8]] 07 ==>[v[0], v[3], v[4], v[7], v[8]] 08 ==>[v[0], v[3], v[4], v[5], v[8]] 09 ==>[v[0], v[1], v[4], v[7], v[8]] 10 ==>[v[0], v[1], v[4], v[5], v[8]] 11 ==>[v[0], v[1], v[2], v[5], v[8]]
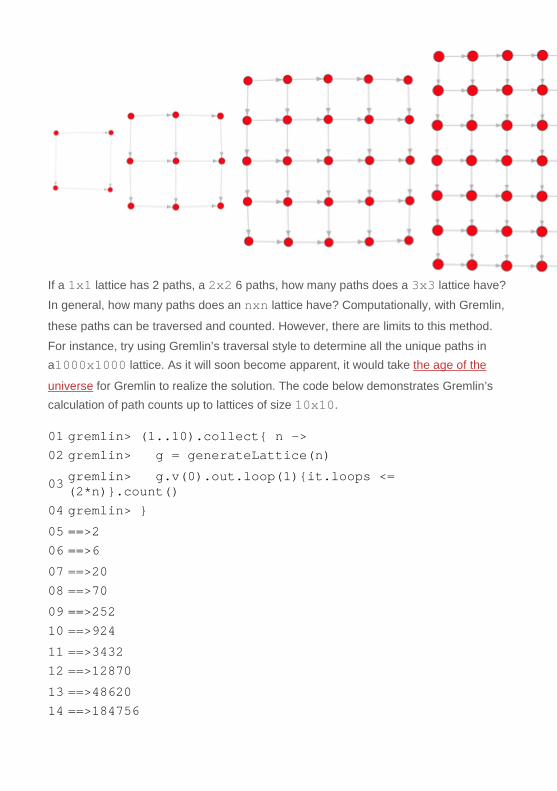
If a 1x1 lattice has 2 paths, a 2x2 6 paths, how many paths does a 3x3 lattice have?
In general, how many paths does an nxn lattice have? Computationally, with Gremlin,
these paths can be traversed and counted. However, there are limits to this method.
For instance, try using Gremlin’s traversal style to determine all the unique paths in a1000x1000 lattice. As it will soon become apparent, it would take the age of the
universe for Gremlin to realize the solution. The code below demonstrates Gremlin’s calculation of path counts up to lattices of size 10x10.
01 gremlin> (1..10).collect{ n -> 02 gremlin> g = generateLattice(n)
03 gremlin> g.v(0).out.loop(1){it.loops <= (2*n)}.count()
04 gremlin> } 05 ==>2 06 ==>6 07 ==>20 08 ==>70 09 ==>252 10 ==>924 11 ==>3432 12 ==>12870 13 ==>48620 14 ==>184756

A Closed Form Solution and the Power of Analytical Techniques
In order to know the number of paths through any arbitrary nxn lattice, a closed form
equation must be derived. One way to determine the closed form equation is to simply
search for the sequence on Google. The first site returned is the Online Encyclopedia
of Integer Sequences. The sequence discovered by Gremlin is called A000984 and
there exists the following note on the page: “The number of lattice paths from (0,0) to (n,n) using steps (1,0) and (0,1).
[Joerg Arndt, Jul 01 2011]“
The same page states that the general form is “2n choose n.” This can be expanded
out to its factorialrepresentation (e.g. 5! = 5 * 4 * 3 * 2 * 1) as diagrammed below.
Given this closed form solution, an explicit graph structure does not need to be traversed. Instead, a combinatoricequation can be evaluated for any n. A
directed 20x20 lattice has over 137 billion unique paths! This number of paths is
simply too many for Gremlin to enumerate in a reasonable amount of time.
1 > n = 20 2 > factorial(2 * n) / factorial(n)^2 3 [1] 137846528820

A question that can be asked is: “How does 2n choose 2 explain the number of paths through an nxn lattice?” When counting the number of paths from
vertex (0,0) to (n,n), where only down and right moves are allowed, there have to
be n moves down and n moves right. This means there are 2n total moves, and as
such, there are n choices (as the other n “choices” are forced by the
previous n choices). Thus, the total number of moves is “2n choose n.” This same
integer sequence is also found in another seemingly unrelated problem (provided by
the same web page).
“Number of possible values of a 2*n bit binary number for which half the bits are on and
half are off. – Gavin Scott, Aug 09 2003″
Each move is a sequence of letters that contains n Ds and n Rs, where down twice
then right twice would be DDRR. This maps the “lattice problem” onto the “binary string
of length 2n problem.” Both problems are essentially realizing the same behavior via
two different representations.
Plotting the Growth of a Function
It is possible to plot the combinatorial function over the sequence 1 to 20 (left plot below). What is interesting to note is that when the y-axis of the plot is set to a log-
scale, the plot is a straight line (right plot below). This means that the number of paths
in a directed lattice grows exponentially as the size of the lattice grows linear.
1 > factorial(2 * seq(1,n)) / factorial(seq(1,n))^2
2 [1] 2 6 20 70 252 924
3 [7] 3432 12870 48620 184756 705432 2704156
4 [13] 10400600 40116600 155117520 601080390 2333606220 9075135300 5 [19] 35345263800 137846528820 6 7 > x <- factorial(2 * seq(1,n)) / factorial(seq(1,n))^2
8 > plot(x, xlab='lattice size (n x n)', ylab='total number of paths', cex.lab=1.4, cex.axis=1.6, lwd=1.5, cex=1.5, type='b')
9 > plot(x, xlab='lattice size (n x n)', ylab="total
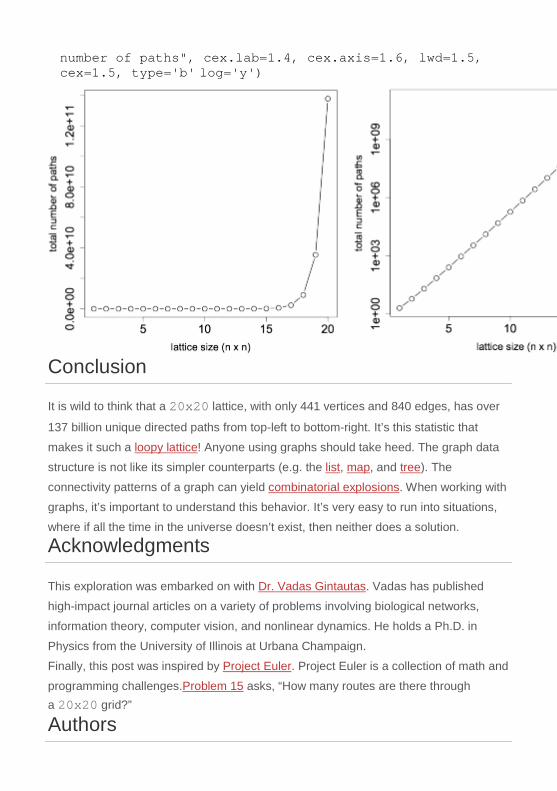
number of paths", cex.lab=1.4, cex.axis=1.6, lwd=1.5, cex=1.5, type='b' log='y')
Conclusion
It is wild to think that a 20x20 lattice, with only 441 vertices and 840 edges, has over
137 billion unique directed paths from top-left to bottom-right. It’s this statistic that
makes it such a loopy lattice! Anyone using graphs should take heed. The graph data
structure is not like its simpler counterparts (e.g. the list, map, and tree). The
connectivity patterns of a graph can yield combinatorial explosions. When working with
graphs, it’s important to understand this behavior. It’s very easy to run into situations,
where if all the time in the universe doesn’t exist, then neither does a solution.
Acknowledgments
This exploration was embarked on with Dr. Vadas Gintautas. Vadas has published
high-impact journal articles on a variety of problems involving biological networks,
information theory, computer vision, and nonlinear dynamics. He holds a Ph.D. in
Physics from the University of Illinois at Urbana Champaign.
Finally, this post was inspired by Project Euler. Project Euler is a collection of math and
programming challenges.Problem 15 asks, “How many routes are there through a 20x20 grid?”
Authors

FILED UNDER BLOG
Multitenant Graph Applications
APRIL 6, 2012 LEAVE A COMMENT
A multitenant software system is a system that supports any number of customers
within a single application instance. Typically, that single instance makes use of a
shared data set, where a customer’s data is properly separated from another’s. While
data separation is a crucial aspect of a multitenant application, there may be system-
wide (e.g. global) computations that require the consumption of all customer data (or
some subset thereof). If no such global operations are required, then a multitenant
application would instead be a multi-instance application, where each customer’s data
is contained in its own isolated silo. A few example multitenant applications are
itemized below.

A company’s confidential reports (e.g. market strategies or financial
information) in a Business Intelligence system is isolated from competitors
within the same application. However, public data (e.g. census, market, tax
data) is shared amongst and linked to by the various tenant data sets. As
such, the public data helps to enhance the usefulness of each company’s
respective private data.
A social network service guarantees user privacy while, in an access control
list (ACL) fashion, allows users to share their data with other trusted users
(e.g. friends) in the system.
Patient records in a multitenant electronic health record system can be
separated to ensure patient confidentiality. However, collective statistics can
be gleaned from the global data set in order to allow data analysts/scientists
to study population-wide health concerns.
Blueprints and PartitionGraph
TinkerPop’s Blueprints 1.2+ makes it easy to build
multitenant, graph-based applications. Blueprints is a graph database interface similar
to the JDBC of the relational databasecommunity. Blueprints is supported by various
graph databases including TinkerGraph, Neo4j,OrientDB, DEX, and InfiniteGraph. In
addition to providing a standard graph interface, Blueprints includes a collection of
graph wrappers. A graph wrapper takes an existing graph implementation, such as Neo4jGraph, and decorates it with new features. For example, wrapping a graph
implementation with ReadOnlyGraph prevents graph mutations.
The graph wrapper that enables multitenancy is called PartitionGraph. PartitionGraph separates the underlying graph into
different partitions/buckets. However, edges can link vertices in two separate partitions.
In this way, multitenancy is clearly realized, where a partition serves as the location for
a single tenant’s data. Moreover, data “cross-fertilization” is possible through

appropriately constrained inter-partition linking. The design ofPartitionGraph borrows heavily from the Named Graph data architecture
popularized by the Web of Data/Linked Data community. The remainder of this post will
demonstrate graph-based multitenancy by means of an Electronic Health Records (EHR) system example using PartitionGraph, the graph traversal/query
language Gremlin, and the colorful characters of TinkerPop.
Intra-Partition Electronic Health Records
The following code snippet demonstrates how PartitionGraph solves the multitenancy problem. First, a new graph is
constructed and wrapped in aPartitionGraph with an initial write partition
of pgp (Pipes General Practice). The graph used is the in-memory TinkerGraph. The
write partition is the partition that newly created data is written too. When patient
Gremlin goes to Pipes General Practice and TinkerPop Medical Center, two vertices are written to the pgp and tmc partitions, respectively.
01 ~$ gremlin 02 03 \,,,/ 04 (o o) 05 -----oOOo-(_)-oOOo-----
06 gremlin> g = new PartitionGraph(new TinkerGraph(), '_partition', 'pgp')
07 ==>partitiongraph[tinkergraph[vertices:0 edges:0]] 08 gremlin> g.getPartitionKey() 09 ==>_partition 10 gremlin> g.getReadPartitions() 11 ==>pgp
12 gremlin> g.getWritePartition() 13 ==>pgp
14 gremlin> gremlinPgp = g.addVertex('gremlin@pipesgeneralpractice') 15 ==>v[gremlin@pipesgeneralpractice] 16 gremlin> g.setWritePartition('tmc')
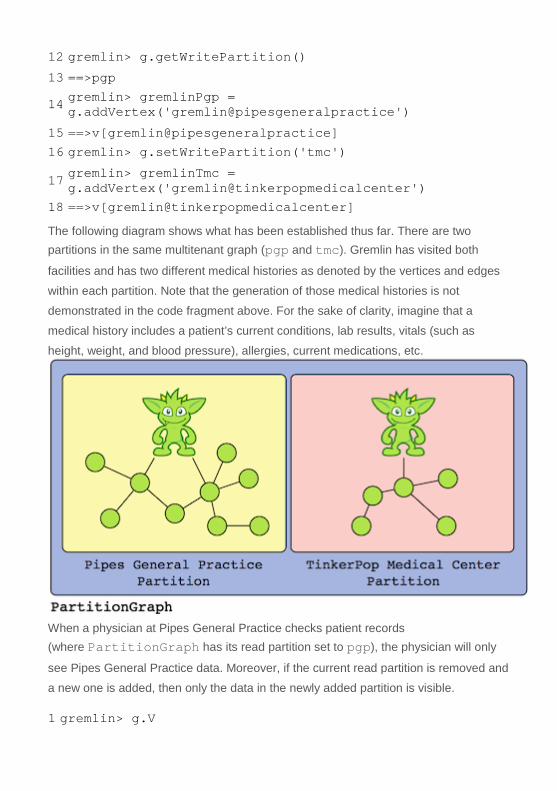
17 gremlin> gremlinTmc = g.addVertex('gremlin@tinkerpopmedicalcenter') 18 ==>v[gremlin@tinkerpopmedicalcenter] The following diagram shows what has been established thus far. There are two partitions in the same multitenant graph (pgp and tmc). Gremlin has visited both
facilities and has two different medical histories as denoted by the vertices and edges
within each partition. Note that the generation of those medical histories is not
demonstrated in the code fragment above. For the sake of clarity, imagine that a
medical history includes a patient’s current conditions, lab results, vitals (such as
height, weight, and blood pressure), allergies, current medications, etc.
When a physician at Pipes General Practice checks patient records (where PartitionGraph has its read partition set to pgp), the physician will only
see Pipes General Practice data. Moreover, if the current read partition is removed and
a new one is added, then only the data in the newly added partition is visible.
1 gremlin> g.V

2 ==>v[gremlin@pipesgeneralpractice] 3 gremlin> g.removeReadPartition('pgp') 4 gremlin> g.addReadPartition('tmc') 5 gremlin> g.V 6 ==>v[gremlin@tinkerpopmedicalcenter] At this point, the example has shown how to firewall customer data with PartitionGraph. Next, it is possible to go beyond simply separating graph
elements into partitions. Edges may either be intra- or inter- partition in that they can
point to vertices in the same partition or to vertices in two different partitions. In this
way, it is possible to introduce global data that can be shared amongst all customers.
Inter-Partition Electronic Health Records
The following code fragment introduces a new snomed partition,
where snomed refers to the publicly availableSNOMED-CT clinical terms data set.
Example terms include pneumonia, common cold, acute nasal catarrh, etc. Vertices and edges are added to the snomed partition that represent the SNOMED-CT concept
hierarchy. Note that in practice, the full SNOMED-CT data set would be parsed into the
partition, but for this simple example, two clinical terms and
their subsumption relationship are written.
1 gremlin> g.setWritePartition('snomed')
2 gremlin> painInRightLeg = g.addVertex('snomed:287048003', [name:'Pain in right leg (finding)'])
3 ==>v[snomed:287048003]
4 gremlin> painInLowerLimb = g.addVertex('snomed:10601006', [name:'Pain in lower limb (finding)'])
5 ==>v[snomed:10601006]
6 gremlin> g.addEdge(painInRightLeg, painInLowerLimb, 'broader') 7 ==>e[0][snomed:287048003-broader->snomed:10601006] When patient Gremlin complains of an injured leg at both Pipes General Practice and
TinkerPop Medical Center, edges are added that connect the patient vertex to the respective clinical term vertex in the snomed partition. ThesecomplainedOf edges
are denoted by the dashed lines in the diagram below.
1 gremlin> g.setWritePartition('pgp')
2 gremlin> g.addEdge(gremlinPgp, painInRightLeg, 'complainedOf')
3 ==>e[1][gremlin@pipesgeneralpractice-complainedOf->snomed:287048003] 4 gremlin> g.setWritePartition('tmc')
5 gremlin> g.addEdge(gremlinTmc, painInRightLeg, 'complainedOf')
6 ==>e[2][gremlin@tinkerpopmedicalcenter-complainedOf->snomed:287048003]
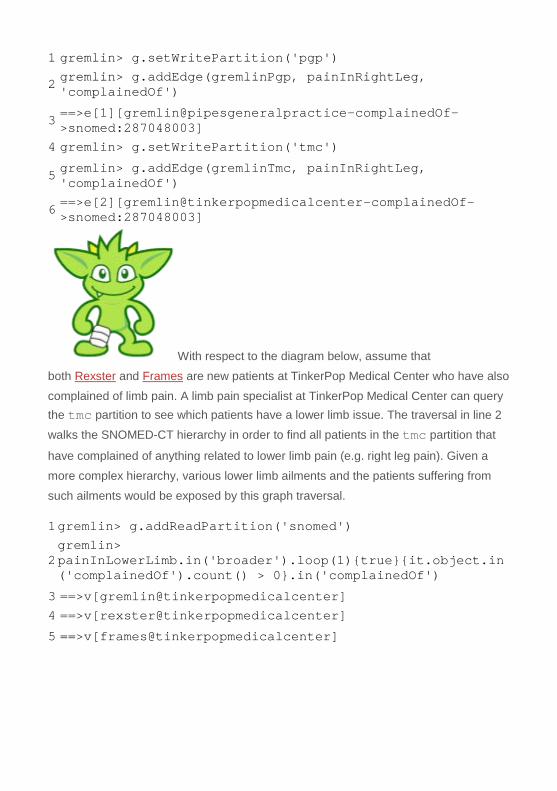
With respect to the diagram below, assume that
both Rexster and Frames are new patients at TinkerPop Medical Center who have also
complained of limb pain. A limb pain specialist at TinkerPop Medical Center can query the tmc partition to see which patients have a lower limb issue. The traversal in line 2
walks the SNOMED-CT hierarchy in order to find all patients in the tmc partition that
have complained of anything related to lower limb pain (e.g. right leg pain). Given a
more complex hierarchy, various lower limb ailments and the patients suffering from
such ailments would be exposed by this graph traversal.
1 gremlin> g.addReadPartition('snomed')
2 gremlin> painInLowerLimb.in('broader').loop(1){true}{it.object.in('complainedOf').count() > 0}.in('complainedOf')
3 ==>v[gremlin@tinkerpopmedicalcenter] 4 ==>v[rexster@tinkerpopmedicalcenter] 5 ==>v[frames@tinkerpopmedicalcenter]

Over a rich EHR data set, various other types of graph queries can be enacted. A few
examples are itemized below.
Determine what treatments were used on patients suffering from the same
lower limb ailment as Gremlin.
Correlate the personal medical histories of all lower limb patients to see if
there is a relationship amongst them (e.g. smoking, obesity, medical
prescriptions, etc.).
Find related clinical terms in SNOMED-CT and locate other patients that have
similar problems (e.g. numbness of the leg, sciatica, etc.). Determine what
treatments were successful for those related patients.
Connect patient Gremlin’s records at both Pipes General Practice and
TinkerPop Medical Center in order to create a unified perspective of Gremlin’s medical history via a sameAs edge (represented by the dash-
dotted line in the diagram above).

Conclusion
The benefit of PartitionGraph is that global data does not introduce significant
complexity to the programming model nor does it expose risks to firewalled partitions.
Moreover, it is possible to enact graph-wide analyses that span all partitions. This can
be a compelling advantage for Business Intelligence applications. Given the running
example, by simply making all partitions readable, it is possible to analyze the medical
histories across all medical facilities and leverage the SNOMED-CT data as the bridge
between these seemingly disparate partitioned data sets.
01 gremlin> g.addReadPartition('pgp') 02 gremlin> g.addReadPartition('tmc') 03 gremlin> g.addReadPartition('snomed') 04 gremlin> g.V 05 ==>v[rexster@tinkerpopmedicalcenter] 06 ==>v[snomed:287048003] 07 ==>v[frames@tinkerpopmedicalcenter] 08 ==>v[snomed:10601006] 09 ==>v[gremlin@tinkerpopmedicalcenter] 10 ==>v[gremlin@pipesgeneralpractice] 11 gremlin> g.E
12 ==>e[3][rexster@tinkerpopmedicalcenter-complainedOf->snomed:287048003]
13 ==>e[2][gremlin@tinkerpopmedicalcenter-complainedOf->snomed:287048003]
14 ==>e[1][gremlin@pipesgeneralpractice-complainedOf->snomed:287048003] 15 ==>e[0][snomed:287048003-broader->snomed:10601006]
16 ==>e[4][gremlin@tinkerpopmedicalcenter-sameAs->gremlin@pipesgeneralpractice]
17 ==>e[5][frames@tinkerpopmedicalcenter-complainedOf->snomed:287048003] PartitionGraph presents interesting opportunities for analyses that mix and
match different partitions in a traversal space. To conclude, a collection of more
complex EHR medical use cases are presented that can be conveniently facilitated by PartitionGraph.
A cross medical facility (i.e. partition) analysis shows that the percentage of
patients with HIV/AIDS who are prescribed an antiretroviral drug is below
standards set forth by the Centers for Medicare and Medicaid Services’
(CMS) quality measures. This analysis prompts healthcare providers and
administrators to consider changes to treatment protocols and drug
formularies.
Physician communities of practice can be identified by analyzing patient visit
and treatment patterns. Given those communities, it is possible
for pharmaceutical companies to predict the influencers within the greater
physician social network in order to yield insight into potential drug adoption
patterns.
Patient records across all partitions provides the foundational data set for a
population-wide analysis within a clinical decision support system.
Authors
FILED UNDER BLOG
Understanding the World using Tables and Graphs
MARCH 22, 2012 LEAVE A COMMENT

Organizations make use of data to drive their decision making, enhance their product
features, and to increase the efficiency of their everyday operations. Data by itself is
not useful. However, with data analysis, patterns such as trends, clusters, predictions,
etc. can be distilled. The way in which data is analyzed is predicated on the way in
which data is structured. The table format popularized by spreadsheets and relational
databases is useful for particular types of processing. However, the primary purpose of
this post is to examine a relatively less exploited structure that can be leveraged when
analyzing an organization’s data — the graph/network.
The Table Perspective
Before discussing graphs, a short review of the table data structure is presented using
a toy example containing a 12 person population. For each individual person, their
name, age, and total spending for the year is gathered. TheR Statistics code snippet
below loads the population data into a table.
> people <- read.table(file='people.txt', sep='\t',
header=TRUE)
> people
id name age spending
1 0 francis 57 100000
2 1 johan 37 150000
3 2 herbert 56 150000
4 3 mike 34 30000
5 4 richard 47 35000
6 5 alberto 31 70000
7 6 stephan 36 90000
8 7 dan 52 40000
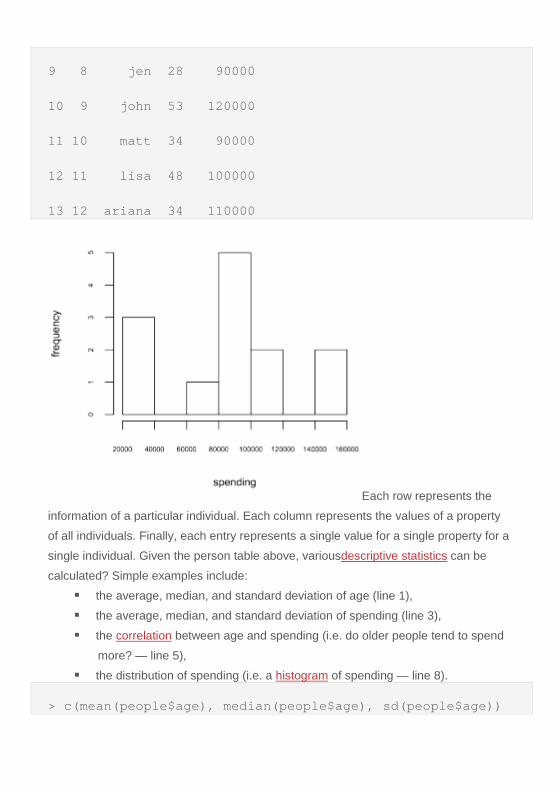
9 8 jen 28 90000
10 9 john 53 120000
11 10 matt 34 90000
12 11 lisa 48 100000
13 12 ariana 34 110000
Each row represents the
information of a particular individual. Each column represents the values of a property
of all individuals. Finally, each entry represents a single value for a single property for a
single individual. Given the person table above, variousdescriptive statistics can be
calculated? Simple examples include:
the average, median, and standard deviation of age (line 1),
the average, median, and standard deviation of spending (line 3),
the correlation between age and spending (i.e. do older people tend to spend
more? — line 5),
the distribution of spending (i.e. a histogram of spending — line 8).
> c(mean(people$age), median(people$age), sd(people$age))
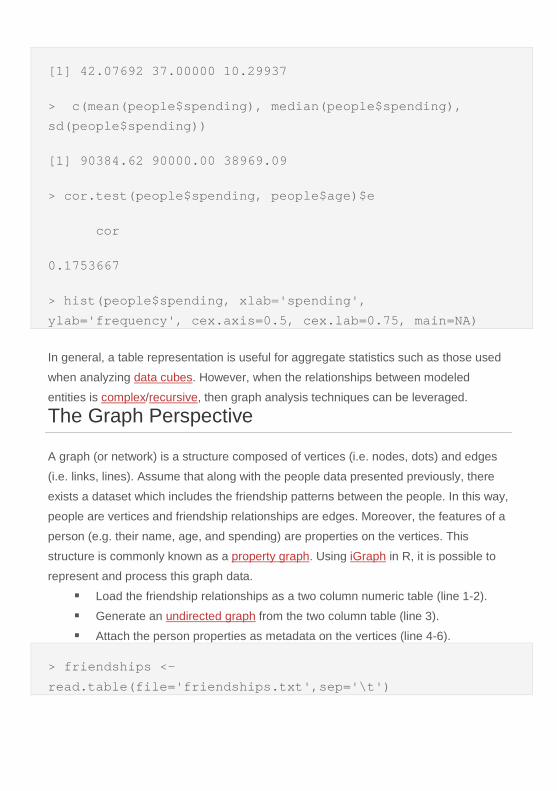
[1] 42.07692 37.00000 10.29937
> c(mean(people$spending), median(people$spending),
sd(people$spending))
[1] 90384.62 90000.00 38969.09
> cor.test(people$spending, people$age)$e
cor
0.1753667
> hist(people$spending, xlab='spending',
ylab='frequency', cex.axis=0.5, cex.lab=0.75, main=NA)
In general, a table representation is useful for aggregate statistics such as those used
when analyzing data cubes. However, when the relationships between modeled
entities is complex/recursive, then graph analysis techniques can be leveraged.
The Graph Perspective
A graph (or network) is a structure composed of vertices (i.e. nodes, dots) and edges
(i.e. links, lines). Assume that along with the people data presented previously, there
exists a dataset which includes the friendship patterns between the people. In this way,
people are vertices and friendship relationships are edges. Moreover, the features of a
person (e.g. their name, age, and spending) are properties on the vertices. This
structure is commonly known as a property graph. Using iGraph in R, it is possible to
represent and process this graph data.
Load the friendship relationships as a two column numeric table (line 1-2).
Generate an undirected graph from the two column table (line 3).
Attach the person properties as metadata on the vertices (line 4-6).
> friendships <-
read.table(file='friendships.txt',sep='\t')
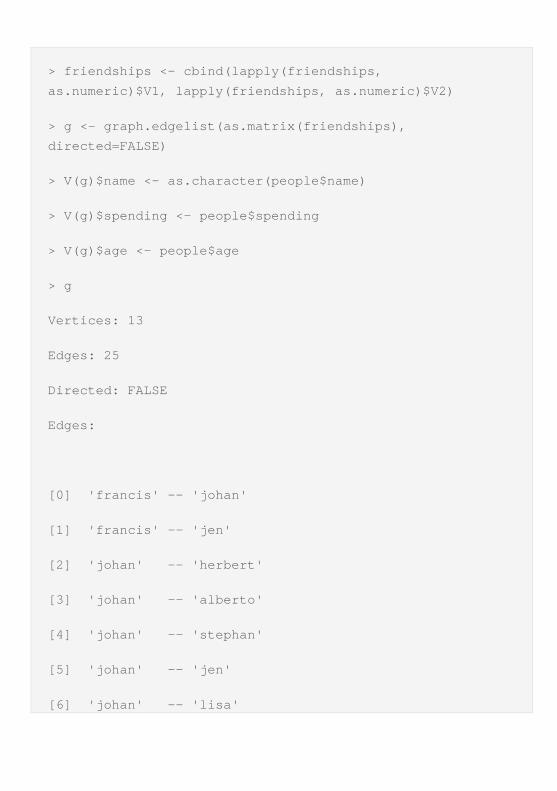
> friendships <- cbind(lapply(friendships,
as.numeric)$V1, lapply(friendships, as.numeric)$V2)
> g <- graph.edgelist(as.matrix(friendships),
directed=FALSE)
> V(g)$name <- as.character(people$name)
> V(g)$spending <- people$spending
> V(g)$age <- people$age
> g
Vertices: 13
Edges: 25
Directed: FALSE
Edges:
[0] 'francis' -- 'johan'
[1] 'francis' -- 'jen'
[2] 'johan' -- 'herbert'
[3] 'johan' -- 'alberto'
[4] 'johan' -- 'stephan'
[5] 'johan' -- 'jen'
[6] 'johan' -- 'lisa'
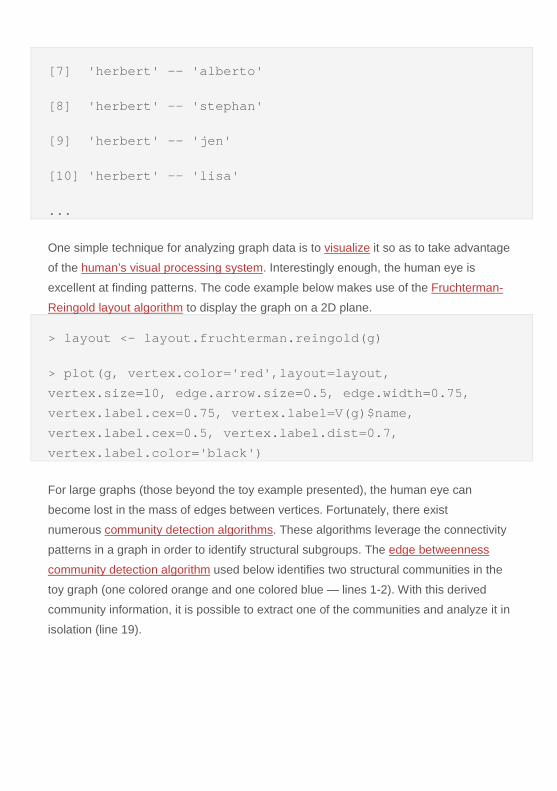
[7] 'herbert' -- 'alberto'
[8] 'herbert' -- 'stephan'
[9] 'herbert' -- 'jen'
[10] 'herbert' -- 'lisa'
...
One simple technique for analyzing graph data is to visualize it so as to take advantage
of the human’s visual processing system. Interestingly enough, the human eye is
excellent at finding patterns. The code example below makes use of the Fruchterman-
Reingold layout algorithm to display the graph on a 2D plane.
> layout <- layout.fruchterman.reingold(g)
> plot(g, vertex.color='red',layout=layout,
vertex.size=10, edge.arrow.size=0.5, edge.width=0.75,
vertex.label.cex=0.75, vertex.label=V(g)$name,
vertex.label.cex=0.5, vertex.label.dist=0.7,
vertex.label.color='black')
For large graphs (those beyond the toy example presented), the human eye can
become lost in the mass of edges between vertices. Fortunately, there exist
numerous community detection algorithms. These algorithms leverage the connectivity
patterns in a graph in order to identify structural subgroups. The edge betweenness
community detection algorithm used below identifies two structural communities in the
toy graph (one colored orange and one colored blue — lines 1-2). With this derived
community information, it is possible to extract one of the communities and analyze it in
isolation (line 19).

> V(g)$community = community.to.membership(g,
edge.betweenness.community(g)$merges,
steps=11)$membership+1
> data.frame(name=V(g)$name, community=V(g)$community)
name community
1 francis 1
2 johan 1
3 herbert 1
4 mike 2
5 richard 2
6 alberto 1
7 stephan 1

8 dan 2
9 jen 1
10 john 2
11 matt 2
12 lisa 1
13 ariana 1
> color <- c(colors()[631], colors()[498])
> plot(g,
vertex.color=color[V(g)$community],layout=layout,
vertex.size=10, edge.arrow.size=0.5, edge.width=0.75,
vertex.label.cex=0.75, vertex.label=V(g)$name,
vertex.label.cex=0.5, vertex.label.dist=0.7,
vertex.label.color='black')
> h <- delete.vertices(g, V(g)[V(g)$community == 2])
> plot(h,
vertex.color="red",layout=layout.fruchterman.reingold,
vertex.size=10, edge.arrow.size=0.5, edge.width=0.75,
vertex.label.cex=0.75, vertex.label=V(h)$name,
vertex.label.cex=0.5, vertex.label.dist=0.7,
vertex.label.color='black')
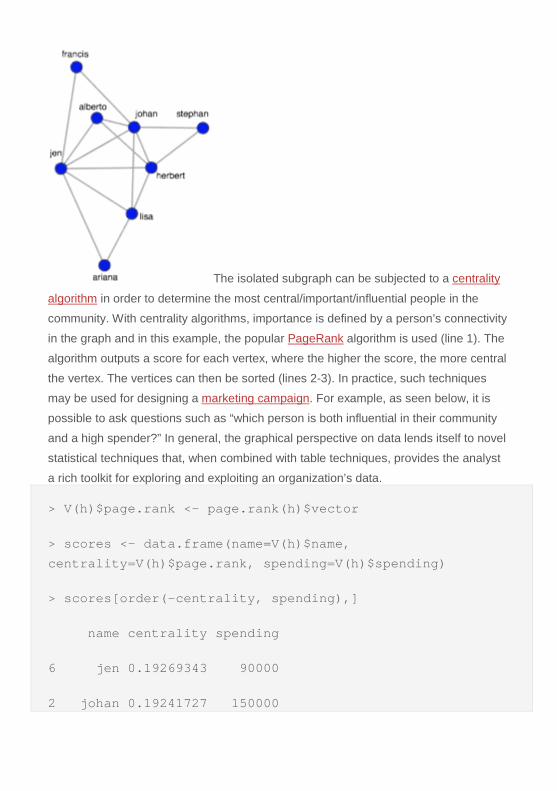
The isolated subgraph can be subjected to a centrality
algorithm in order to determine the most central/important/influential people in the
community. With centrality algorithms, importance is defined by a person’s connectivity
in the graph and in this example, the popular PageRank algorithm is used (line 1). The
algorithm outputs a score for each vertex, where the higher the score, the more central
the vertex. The vertices can then be sorted (lines 2-3). In practice, such techniques
may be used for designing a marketing campaign. For example, as seen below, it is
possible to ask questions such as “which person is both influential in their community
and a high spender?” In general, the graphical perspective on data lends itself to novel
statistical techniques that, when combined with table techniques, provides the analyst
a rich toolkit for exploring and exploiting an organization’s data.
> V(h)$page.rank <- page.rank(h)$vector
> scores <- data.frame(name=V(h)$name,
centrality=V(h)$page.rank, spending=V(h)$spending)
> scores[order(-centrality, spending),]
name centrality spending
6 jen 0.19269343 90000
2 johan 0.19241727 150000
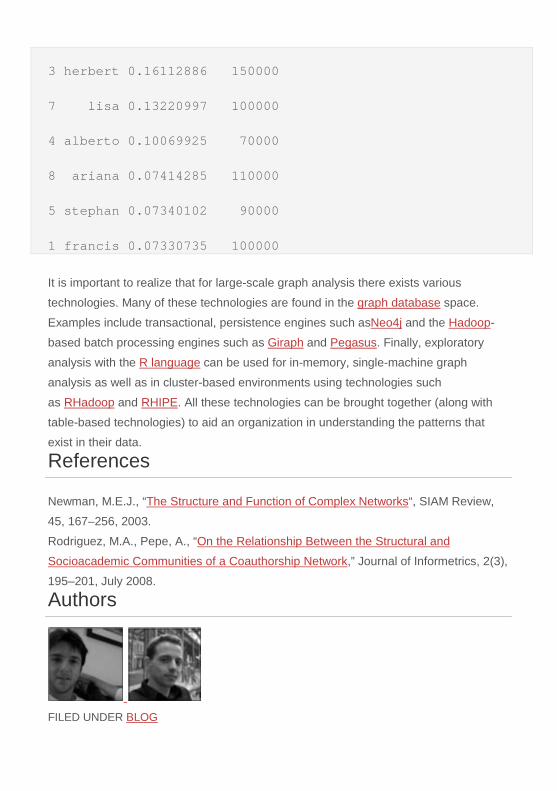
3 herbert 0.16112886 150000
7 lisa 0.13220997 100000
4 alberto 0.10069925 70000
8 ariana 0.07414285 110000
5 stephan 0.07340102 90000
1 francis 0.07330735 100000
It is important to realize that for large-scale graph analysis there exists various
technologies. Many of these technologies are found in the graph database space.
Examples include transactional, persistence engines such asNeo4j and the Hadoop-
based batch processing engines such as Giraph and Pegasus. Finally, exploratory
analysis with the R language can be used for in-memory, single-machine graph
analysis as well as in cluster-based environments using technologies such
as RHadoop and RHIPE. All these technologies can be brought together (along with
table-based technologies) to aid an organization in understanding the patterns that
exist in their data.
References
Newman, M.E.J., “The Structure and Function of Complex Networks“, SIAM Review,
45, 167–256, 2003.
Rodriguez, M.A., Pepe, A., “On the Relationship Between the Structural and
Socioacademic Communities of a Coauthorship Network,” Journal of Informetrics, 2(3),
195–201, July 2008.
Authors
FILED UNDER BLOG
Graph Degree Distributions using R over Hadoop
FEBRUARY 5, 2012 1 COMMENT
There are two common types of graph engines. One type is focused on providing real-
time, traversal-based algorithms over linked-list graphs represented on a single-server.
Such engines are typically called graph databases and some of the vendors
include Neo4j, OrientDB, DEX, and InfiniteGraph. The other type of graph engine is
focused on batch-processing using vertex-centric message passing within a graph
represented across a cluster of machines. Graph engines of this form
include Hama, Golden Orb, Giraph, and Pregel.
The purpose of this post is to demonstrate how to express the computation of two
fundamental graph statistics — each as a graph traversal and as
a MapReduce algorithm. The graph engines explored for this purpose are Neo4j
and Hadoop. However, with respects to Hadoop, instead of focusing on a particular
vertex-centric BSP-based graph-processing package such as Hama or Giraph, the
results presented are via native Hadoop (HDFS + MapReduce). Moreover, instead of
developing the MapReduce algorithms in Java, the R programming language is
used. RHadoop is a small, open-source package developed by Revolution
Analytics that binds R to Hadoop and allows for the representation of MapReduce
algorithms using native R. The two graph algorithms presented compute degree statistics: vertex in-
degree and graph in-degree distribution. Both are related, and in fact, the results of the
first can be used as the input to the second. That is, graph in-degree distribution is a

function of vertex in-degree. Together, these two fundamental statistics serve as a
foundation for more quantifying statistics developed in the domains of graph
theory and network science. 1. Vertex in-degree: How many incoming edges does vertex X have?
2. Graph in-degree distribution: How many vertices have X number of
incoming edges?
These two algorithms are calculated over an
artificially generated graph that contains 100,000 vertices and 704,002 edges. A subset
is diagrammed on the left. The algorithm used to generate the graph is
called preferential attachment. Preferential attachment yields graphs with “natural
statistics” that have degree distributions that are analogous to real-world
graphs/networks. The respective iGraph R code is provided below. Once constructed
and simplified (i.e. no more than one edge between any two vertices and no self-
loops), the vertices and edges are counted. Next, the first five edges are iterated and
displayed. The first edge reads, “vertex 2 is connected to vertex 0.” Finally, the graph is
persisted to disk as a GraphML file.
~$ r
R version 2.13.1 (2011-07-08)
Copyright (C) 2011 The R Foundation for Statistical
Computing
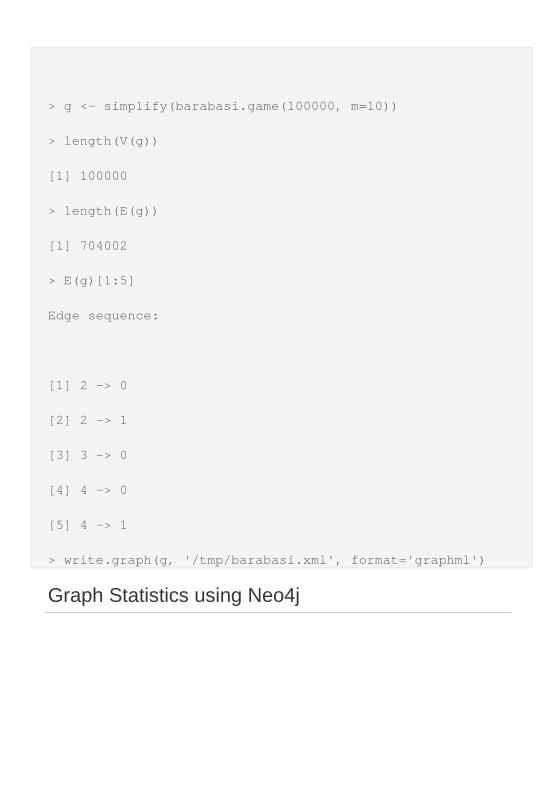
> g <- simplify(barabasi.game(100000, m=10))
> length(V(g))
[1] 100000
> length(E(g))
[1] 704002
> E(g)[1:5]
Edge sequence:
[1] 2 -> 0
[2] 2 -> 1
[3] 3 -> 0
[4] 4 -> 0
[5] 4 -> 1
> write.graph(g, '/tmp/barabasi.xml', format='graphml')
Graph Statistics using Neo4j

When a graph is on the
order of 10 billion elements (vertices+edges), then a single-server graph database is
sufficient for performing graph analytics. As a side note, when those
analytics/algorithms are “ego-centric” (i.e. when the traversal emanates from a single
vertex or small set of vertices), then they can typically be evaluated in real-time (e.g. <
1000 ms). To compute these in-degree statistics, Gremlin is used. Gremlin is a graph
traversal language developed by TinkerPop that is distributed with Neo4j, OrientDB,
DEX, InfiniteGraph, and the RDF engine Stardog. The Gremlin code below loads the
GraphML file created by R in the previous section into Neo4j. It then performs a count
of the vertices and edges in the graph.
~$ gremlin
\,,,/
(o o)
-----oOOo-(_)-oOOo-----
gremlin> g = new Neo4jGraph('/tmp/barabasi')
==>neo4jgraph[EmbeddedGraphDatabase [/tmp/barabasi]]
gremlin> g.loadGraphML('/tmp/barabasi.xml')
==>null
gremlin> g.V.count()
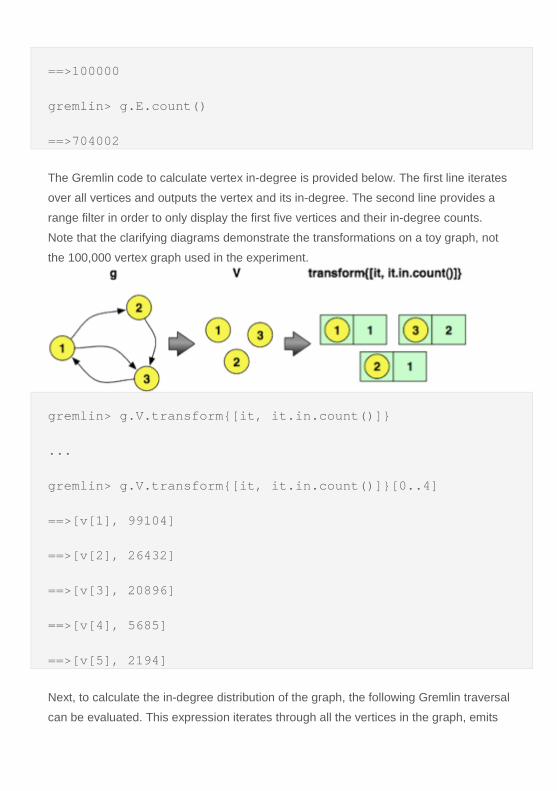
==>100000
gremlin> g.E.count()
==>704002
The Gremlin code to calculate vertex in-degree is provided below. The first line iterates
over all vertices and outputs the vertex and its in-degree. The second line provides a
range filter in order to only display the first five vertices and their in-degree counts.
Note that the clarifying diagrams demonstrate the transformations on a toy graph, not
the 100,000 vertex graph used in the experiment.
gremlin> g.V.transform{[it, it.in.count()]}
...
gremlin> g.V.transform{[it, it.in.count()]}[0..4]
==>[v[1], 99104]
==>[v[2], 26432]
==>[v[3], 20896]
==>[v[4], 5685]
==>[v[5], 2194]
Next, to calculate the in-degree distribution of the graph, the following Gremlin traversal
can be evaluated. This expression iterates through all the vertices in the graph, emits
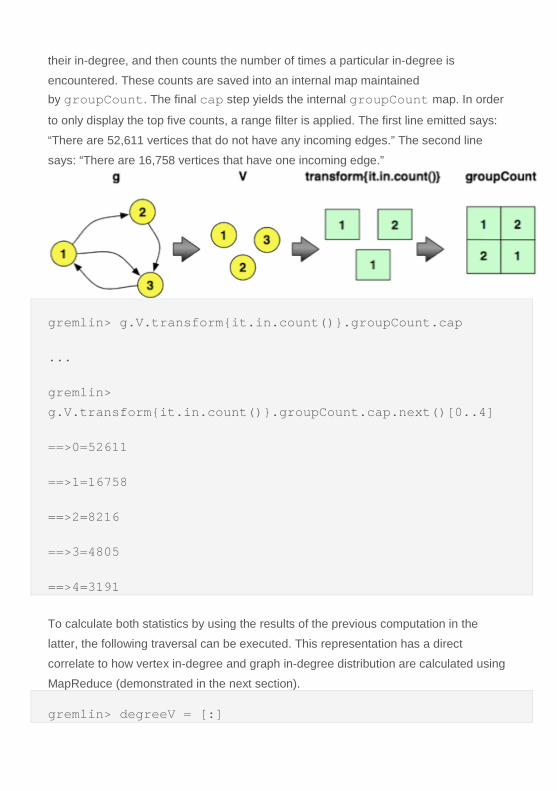
their in-degree, and then counts the number of times a particular in-degree is
encountered. These counts are saved into an internal map maintained by groupCount. The final cap step yields the internal groupCount map. In order
to only display the top five counts, a range filter is applied. The first line emitted says:
“There are 52,611 vertices that do not have any incoming edges.” The second line
says: “There are 16,758 vertices that have one incoming edge.”
gremlin> g.V.transform{it.in.count()}.groupCount.cap
...
gremlin>
g.V.transform{it.in.count()}.groupCount.cap.next()[0..4]
==>0=52611
==>1=16758
==>2=8216
==>3=4805
==>4=3191
To calculate both statistics by using the results of the previous computation in the
latter, the following traversal can be executed. This representation has a direct
correlate to how vertex in-degree and graph in-degree distribution are calculated using
MapReduce (demonstrated in the next section).
gremlin> degreeV = [:]
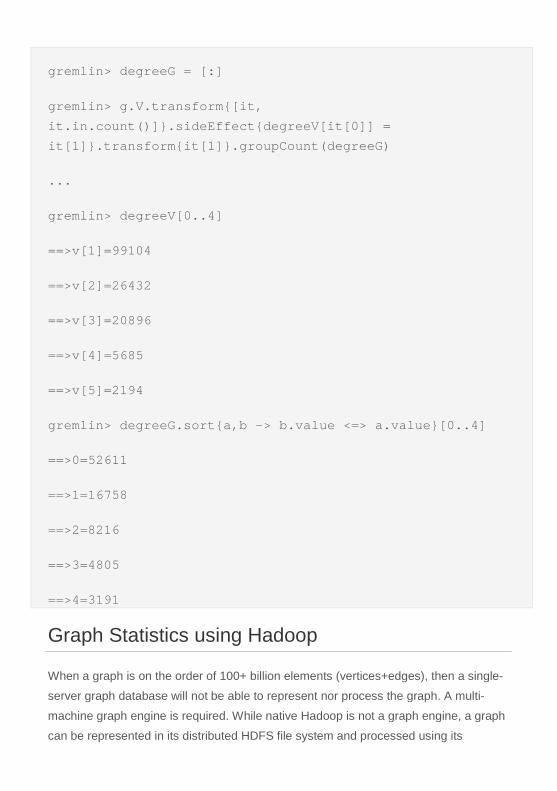
gremlin> degreeG = [:]
gremlin> g.V.transform{[it,
it.in.count()]}.sideEffect{degreeV[it[0]] =
it[1]}.transform{it[1]}.groupCount(degreeG)
...
gremlin> degreeV[0..4]
==>v[1]=99104
==>v[2]=26432
==>v[3]=20896
==>v[4]=5685
==>v[5]=2194
gremlin> degreeG.sort{a,b -> b.value <=> a.value}[0..4]
==>0=52611
==>1=16758
==>2=8216
==>3=4805
==>4=3191
Graph Statistics using Hadoop
When a graph is on the order of 100+ billion elements (vertices+edges), then a single-
server graph database will not be able to represent nor process the graph. A multi-
machine graph engine is required. While native Hadoop is not a graph engine, a graph
can be represented in its distributed HDFS file system and processed using its

distributed processing MapReduce framework. The graph generated previously is
loaded up in R and a count of its vertices and edges is conducted. Next, the graph is
represented as an edge list. An edge list (for a single-relational graph) is a list of pairs,
where each pair is ordered and denotes the tail vertex id and the head vertex id of the
edge. The edge list can be pushed to HDFS using RHadoop. The variable edge.list represents a pointer to this HDFS file.
> g <- read.graph('/tmp/barabasi.xml', format='graphml')
> length(V(g))
[1] 100000
> length(E(g))
[1] 704002
> edge.list <- to.dfs(get.edgelist(g))
In order to calculate vertex in-degree, a MapReduce job is evaluated on edge.list.
The map function is fed key/value pairs where the key is an edge id and the value is
the ids of the tail and head vertices of the edge (represented as a list). For each
key/value input, the head vertex (i.e. incoming vertex) is emitted along with the number
1. The reduce function is fed key/value pairs where the keys are vertices and the
values are a list of 1s. The output of the reduce job is a vertex id and the length of the
list of 1s (i.e. the number of times that vertex was seen as an incoming/head vertex of
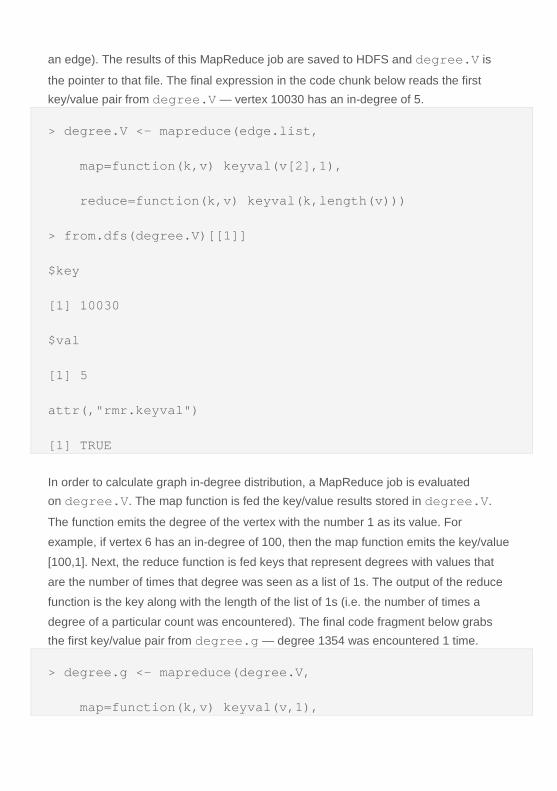
an edge). The results of this MapReduce job are saved to HDFS and degree.V is
the pointer to that file. The final expression in the code chunk below reads the first key/value pair from degree.V — vertex 10030 has an in-degree of 5.
> degree.V <- mapreduce(edge.list,
map=function(k,v) keyval(v[2],1),
reduce=function(k,v) keyval(k,length(v)))
> from.dfs(degree.V)[[1]]
$key
[1] 10030
$val
[1] 5
attr(,"rmr.keyval")
[1] TRUE
In order to calculate graph in-degree distribution, a MapReduce job is evaluated on degree.V. The map function is fed the key/value results stored in degree.V.
The function emits the degree of the vertex with the number 1 as its value. For
example, if vertex 6 has an in-degree of 100, then the map function emits the key/value
[100,1]. Next, the reduce function is fed keys that represent degrees with values that
are the number of times that degree was seen as a list of 1s. The output of the reduce
function is the key along with the length of the list of 1s (i.e. the number of times a
degree of a particular count was encountered). The final code fragment below grabs the first key/value pair from degree.g — degree 1354 was encountered 1 time.
> degree.g <- mapreduce(degree.V,
map=function(k,v) keyval(v,1),

reduce=function(k,v) keyval(k,length(v)))
> from.dfs(degree.g)[[1]]
$key
[1] 1354
$val
[1] 1
attr(,"rmr.keyval")
[1] TRUE
In concert, these two computations can be composed into a single MapReduce
expression.
> degree.g <- mapreduce(mapreduce(edge.list,
map=function(k,v) keyval(v[2],1),
reduce=function(k,v) keyval(k,length(v))),
map=function(k,v) keyval(v,1),
reduce=function(k,v) keyval(k,length(v)))
Note that while a graph can be on the order of 100+ billion elements, the degree distribution is much smaller and can typically fit into memory. In general, edge.list
> degree.V > degree.g. Due to this fact, it is possible to pull
the degree.g file off of HDFS, place it into main memory, and plot the results stored
within. The degree.gdistribution is plotted on a log/log plot. As suspected, the
preferential attachment algorithm generated a graph with natural “scale-free” statistics
— most vertices have a small in-degree and very few have a large in-degree.
> degree.g.memory <- from.dfs(degree.g)
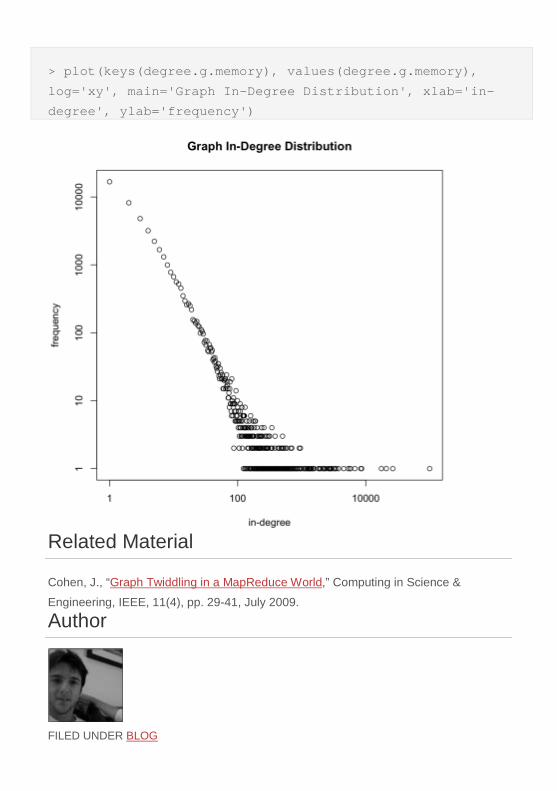
> plot(keys(degree.g.memory), values(degree.g.memory),
log='xy', main='Graph In-Degree Distribution', xlab='in-
degree', ylab='frequency')
Related Material
Cohen, J., “Graph Twiddling in a MapReduce World,” Computing in Science &
Engineering, IEEE, 11(4), pp. 29-41, July 2009.
Author
FILED UNDER BLOG
Graph Theory and Network Science
JANUARY 10, 2012 3 COMMENTS
Graph theory and network science are two related academic fields that have found
application in numerous commercial industries. The terms ‘graph’ and ‘network’ are
synonymous and one or the other is favored depending on the domain of application. A
Rosetta Stone of terminology is provided below to help ground the academic terms to
familiar, real-world structures.
aph network brain knowledge society circuit web
rtices nodes neurons concepts people elements pag
ges links axons relations ties wires href
Graph theory is a branch of discrete
mathematics concerned with proving theorems and developing algorithms for arbitrary
graphs (e.g. random graphs, lattices, hierarchies). For example, can a graph with four
vertices, seven edges, and structured according to the landmasses and bridges
of Königsberg have its edges traversed once and only once? From such problems, the
field of graph theory has developed numerous algorithms that can be applied to any
graphical structure irrespective of the domain it represents (i.e. irrespective of what the
graph models in the real-world). Examples of such developments are provided below:
Planar graphs: Can a graph be laid onto a 2D surface such that no edges
cross. This problem has application, for example, in circuit board
design where no two wires can overlap.
Shortest paths: What is the minimum number of hops required to get from
vertex A to vertex B in a graph? Moreover, what is the path that was taken?
This problem has applications in routing, automated reasoning, and planning.
Energy flows: If a continuous “energy field” is diffused out from a particular
vertex (or set of vertices), how much energy do the other vertices in the graph
receive? This problem is found in recommendation engines, knowledge
discovery, artificial cognition/intelligence, ranking, and natural language
processing.
In the domain of network science, researchers don’t study networks in the abstract, but
instead, they study numerous real-world representations in order to understand the
universal properties of networks. Examples of such networks include social
networks, transportation networks, gene regulatory networks, knowledge
networks,scholarly networks, etc. Network science is a relatively new discipline that
has only been able to blossom because of computer technologies. With computers,
scientists are able analyze large-scale networks such as the World Wide Web which
has approximately 500 billion nodes. Due to their size, such structures tend to be
studied from a statistical perspective.
Degree distribution: If a node is randomly selected from the network, what is
the probability that it has X number of edges emanating from it? This statistic
has implications for understanding how disease spreads through a social
network and how communication networks can be sabotaged by directed
attacks.
Assortative mixing: Do nodes with characteristic A tend to connect to nodes
with characteristic B? Such information is useful as a descriptive statistic as
well as for inferring future connectivity patterns in the network.
Growth models: Do all real-world networks grow according to a similar rule?
Network growth models have implications for designing learning systems and
understanding the future statistics of a fledgling network.
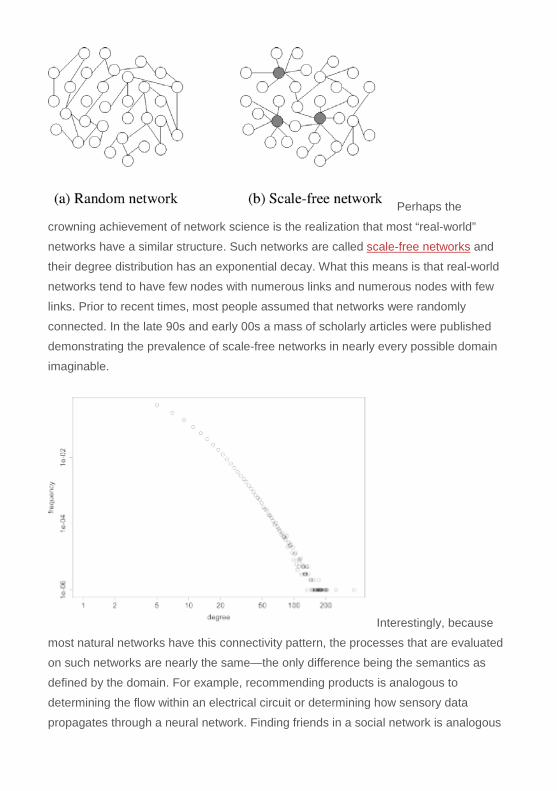
Perhaps the
crowning achievement of network science is the realization that most “real-world”
networks have a similar structure. Such networks are called scale-free networks and
their degree distribution has an exponential decay. What this means is that real-world
networks tend to have few nodes with numerous links and numerous nodes with few
links. Prior to recent times, most people assumed that networks were randomly
connected. In the late 90s and early 00s a mass of scholarly articles were published
demonstrating the prevalence of scale-free networks in nearly every possible domain
imaginable.
Interestingly, because
most natural networks have this connectivity pattern, the processes that are evaluated
on such networks are nearly the same—the only difference being the semantics as
defined by the domain. For example, recommending products is analogous to
determining the flow within an electrical circuit or determining how sensory data
propagates through a neural network. Finding friends in a social network is analogous

to routing packets in a communication network or determining the shortest route on a
transportation network. Ranking web pages is analogous to determining the most
influential people in a social network or finding the most relevant concepts in a
knowledge network. Finally, all these problems are variations of one general process—
graph traversing. Graph traversing is the simple process of moving from one vertex to
another vertex over the edges in the graph and either mutating the structure or
collecting bits of information along the way. The result of a traversal is either an
evolution of the graph or a statistic about the graph.
The tools and techniques developed by graph theorists and networks scientists has an
astounding number of practical applications. Interestingly enough, once one has a
general understanding of graph theory and network science, the world’s problems start
to be seen as one in the same problem.
Related Material
Rodriguez, M.A., Neubauer, P., “The Graph Traversal Pattern,” Graph Data
Management: Techniques and Applications, eds. S. Sakr, E. Pardede, IGI Global,
ISBN:9781613500538, August 2011.
Watkins, J.H., M.A. Rodriguez, “A Survey of Web-based Collective Decision Making
Systems,” Studies in Computational Intelligence: Evolution of the Web in Artificial
Intelligence Environments, Springer-Verlag, pages 245-279, 2008.
Rodriguez, M.A., “A Graph-Based Movie Recommender Engine,” Marko A. Rodriguez
Blog, 2011.
Rodriguez, M.A., “Graphs, Brains, and Gremlin,” Marko A. Rodriguez Blog, 2011.
Authors
FILED UNDER BLOG