Fast-Decodable MIMO HARQ Systems
13
1 Fast-Decodable MIMO HARQ Systems Seyyed Saleh Hosseini, Student Member, IEEE, Jamshid Abouei, Senior Member, IEEE, and Murat Uysal, Senior Member, IEEE Abstract— This paper presents a comprehensive study on the problem of decoding complexity in a Multi-Input Multi- Output (MIMO) Hybrid Automatic Repeat reQuest (HARQ) system based on Space-Time Block Codes (STBCs). We show that there exist two classes of fast-decodable MIMO HARQ systems: independent and dependent STBC structures. For the independent class, two types of protocols namely, fixed and adaptive threshold-based are presented and their effectiveness in both computational complexity reduction and spectral efficiency preservation are discussed. For the dependent class, a fast Sphere Decoder (SD) algorithm with a low computational complexity is proposed for decoding process of HARQ rounds. Two new concepts are introduced to leverage the fast-decodable notion in MIMO HARQ systems. Simulation results show that the proposed fast-decodable MIMO HARQ protocols in both classes provide a significant reduction in the decoding complexity as compared with the original MIMO HARQ method. Index Terms— Multi-Input Multi-Output (MIMO), Hybrid Automatic Repeat reQuest (HARQ) systems, Space-Time Block Codes (STBCs), Sphere Decoder (SD) algorithm, fast-decodable. I. I NTRODUCTION Space-Time Coding (STC) has been recognized as an effective Multiple-Input Multiple-Output (MIMO) approach in wireless systems that provides a reliable communication without any bandwidth expansion through utilizing multiple transmit and/or receive antennas [1]. Space-Time Block Code (STBC) is among STC techniques which achieves full di- versity gain with a lower complexity in the implementation [2]. The most famous class of STBCs is Orthogonal STBCs (OSTBCs) with linear decoding complexity for the (optimum) Maximum Likelihood (ML) decoder. The first OSTBC, which is widely known as the Alamouti code, is designed for two transmit antennas [1]. The idea of OSTBCs is extended for any number of transmit antennas in [2], [3]. In addition, OSTBCs can be considered as a special case of fast-decodable STBCs class. Fast-decodable property is formally defined for STBCs implemented by a lower computational complexity Sphere Decoder (SD) algorithm on the order of O(ℓM L-ℓ+1 ) where M , L, and ℓ are the size of signal constellation, the number of transmitted symbols, and the Complexity Reduction Factor (CRF), respectively [4]. Several examples of other fast- decodable STBCs can be found in [4]–[9]. Manuscript received July 18, 2014; revised November 21, 2014; accepted January 8, 2015. The associate editor coordinating the review of this paper and approving it for publication was Prof. Zhaocheng Wang. S. S. Hosseini is with the Department of Computer and Electrical En- gineering, Bardsir Branch, Islamic Azad University, Kerman, Iran, (e-mail: [email protected]) J. Abouei is with the Department of Electrical and Computer Engineering, Yazd University, Yazd, Iran, (e-mail: [email protected]). M. Uysal is with the Department of Electrical and Electronics En- gineering, Ozyegin University, Istanbul, Turkey, 34794, (e-mail: mu- [email protected]). STBC systems are open-loop MIMO settings. However, in many wireless applications, there exists a feedback channel between the transmitter and the receiver which allows the implementation of a closed-loop structure to achieve a high reliable communication in a MIMO system [10]. Particularly, if an unsuccessful detection is occurred for transmitted data, the receiver requests the same data transmission via a feedback channel. This technique is named Automatic Repeat reQuest (ARQ) if the receiver discards previous (re)transmissions in the decoding process. A more efficient natural way which combines previous copies of (re)transmitted data is called Hybrid ARQ (HARQ) [11]. There exist two types of HARQ techniques namely, Chase Combining (CC) [12] and Incremen- tal Redundancy (IR) [13] schemes. The CC scheme coherently combines all received data packets before (or after) performing the interference cancelation process by a linear-based receiver such as Zero-Forcing (ZF) or Minimum Mean Square Error (MMSE) in MIMO systems [11]. Since there is no coding technique in all possible retransmission rounds of a data packet, the achievable throughput in the CC scheme is low. However, in the IR scheme, the redundant coded packets are transmitted with different lengths to reach a higher throughput efficiency at the cost of a high decoding complexity. There are several works in the literature dealing with the combination of STC with HARQ in multiple antenna wireless systems. In [14] and [15], a recursive realization of Space- Time Trellis Codes (STTCs) is analyzed for MIMO HARQ systems. However, the decoding complexity of a well de- signed STTC grows exponentially when the transmission rate increases [2]. Authors in [16] and [17] present some switch- based MIMO HARQ protocols that work between the spatial multiplexing and the STBC modes. In [18], a linear space-time precoder is designed for a MIMO HARQ system to compen- sate the lack of the time diversity in slow-fading channels. The problem of diversity-multiplexing tradeoff [19] in MIMO HARQ systems has been investigated from the information- theoretic point of view in [20]–[22]. Recently, the optimal successful average rate of HARQ STBC configurations has been theoretically analyzed for various STBC schemes in [23]. Performance of MIMO HARQ systems has been studied and analyzed from various perspectives including packet com- bining manners [11], [24]–[28] and the information-theoretic [20]–[23], [29], [30]. However, little research has been devoted on the decoding complexity issue in MIMO HARQ systems (e.g., [31]–[33]). In [31], a suboptimal hard decision decoding algorithm is utilized in MIMO HARQ systems to reduce the decoding complexity at the cost of sacrificing the Bit Error Rate (BER) performance. Reference [32] utilizes the SD algorithm along with off-line data at the receiver side to avoid a high computational complexity in a mapping diversity based [34] MIMO HARQ system. However, when the data rate or the number of constellation points increases, the stored
Transcript of Fast-Decodable MIMO HARQ Systems

1
Fast-Decodable MIMO HARQ SystemsSeyyed Saleh Hosseini, Student Member, IEEE, Jamshid Abouei, Senior Member, IEEE, and Murat Uysal, Senior Member, IEEE
Abstract— This paper presents a comprehensive study onthe problem of decoding complexity in a Multi-Input Multi-Output (MIMO) Hybrid Automatic Repeat reQuest (HARQ)system based on Space-Time Block Codes (STBCs). We showthat there exist two classes of fast-decodable MIMO HARQsystems: independent and dependent STBC structures. For theindependent class, two types of protocols namely, fixed andadaptive threshold-based are presented and their effectiveness inboth computational complexity reduction and spectral efficiencypreservation are discussed. For the dependent class, a fast SphereDecoder (SD) algorithm with a low computational complexityis proposed for decoding process of HARQ rounds. Two newconcepts are introduced to leverage the fast-decodable notionin MIMO HARQ systems. Simulation results show that theproposed fast-decodable MIMO HARQ protocols in both classesprovide a significant reduction in the decoding complexity ascompared with the original MIMO HARQ method.
Index Terms— Multi-Input Multi-Output (MIMO), HybridAutomatic Repeat reQuest (HARQ) systems, Space-Time BlockCodes (STBCs), Sphere Decoder (SD) algorithm, fast-decodable.
I. INTRODUCTION
Space-Time Coding (STC) has been recognized as aneffective Multiple-Input Multiple-Output (MIMO) approachin wireless systems that provides a reliable communicationwithout any bandwidth expansion through utilizing multipletransmit and/or receive antennas [1]. Space-Time Block Code(STBC) is among STC techniques which achieves full di-versity gain with a lower complexity in the implementation[2]. The most famous class of STBCs is Orthogonal STBCs(OSTBCs) with linear decoding complexity for the (optimum)Maximum Likelihood (ML) decoder. The first OSTBC, whichis widely known as the Alamouti code, is designed for twotransmit antennas [1]. The idea of OSTBCs is extended forany number of transmit antennas in [2], [3]. In addition,OSTBCs can be considered as a special case of fast-decodableSTBCs class. Fast-decodable property is formally defined forSTBCs implemented by a lower computational complexitySphere Decoder (SD) algorithm on the order of O(ℓML−ℓ+1)where M , L, and ℓ are the size of signal constellation, thenumber of transmitted symbols, and the Complexity ReductionFactor (CRF), respectively [4]. Several examples of other fast-decodable STBCs can be found in [4]–[9].
Manuscript received July 18, 2014; revised November 21, 2014; acceptedJanuary 8, 2015. The associate editor coordinating the review of this paperand approving it for publication was Prof. Zhaocheng Wang.
S. S. Hosseini is with the Department of Computer and Electrical En-gineering, Bardsir Branch, Islamic Azad University, Kerman, Iran, (e-mail:[email protected])
J. Abouei is with the Department of Electrical and Computer Engineering,Yazd University, Yazd, Iran, (e-mail: [email protected]).
M. Uysal is with the Department of Electrical and Electronics En-gineering, Ozyegin University, Istanbul, Turkey, 34794, (e-mail: [email protected]).
STBC systems are open-loop MIMO settings. However, inmany wireless applications, there exists a feedback channelbetween the transmitter and the receiver which allows theimplementation of a closed-loop structure to achieve a highreliable communication in a MIMO system [10]. Particularly,if an unsuccessful detection is occurred for transmitted data,the receiver requests the same data transmission via a feedbackchannel. This technique is named Automatic Repeat reQuest(ARQ) if the receiver discards previous (re)transmissions inthe decoding process. A more efficient natural way whichcombines previous copies of (re)transmitted data is calledHybrid ARQ (HARQ) [11]. There exist two types of HARQtechniques namely, Chase Combining (CC) [12] and Incremen-tal Redundancy (IR) [13] schemes. The CC scheme coherentlycombines all received data packets before (or after) performingthe interference cancelation process by a linear-based receiversuch as Zero-Forcing (ZF) or Minimum Mean Square Error(MMSE) in MIMO systems [11]. Since there is no codingtechnique in all possible retransmission rounds of a datapacket, the achievable throughput in the CC scheme is low.However, in the IR scheme, the redundant coded packets aretransmitted with different lengths to reach a higher throughputefficiency at the cost of a high decoding complexity.
There are several works in the literature dealing with thecombination of STC with HARQ in multiple antenna wirelesssystems. In [14] and [15], a recursive realization of Space-Time Trellis Codes (STTCs) is analyzed for MIMO HARQsystems. However, the decoding complexity of a well de-signed STTC grows exponentially when the transmission rateincreases [2]. Authors in [16] and [17] present some switch-based MIMO HARQ protocols that work between the spatialmultiplexing and the STBC modes. In [18], a linear space-timeprecoder is designed for a MIMO HARQ system to compen-sate the lack of the time diversity in slow-fading channels.The problem of diversity-multiplexing tradeoff [19] in MIMOHARQ systems has been investigated from the information-theoretic point of view in [20]–[22]. Recently, the optimalsuccessful average rate of HARQ STBC configurations hasbeen theoretically analyzed for various STBC schemes in [23].
Performance of MIMO HARQ systems has been studiedand analyzed from various perspectives including packet com-bining manners [11], [24]–[28] and the information-theoretic[20]–[23], [29], [30]. However, little research has been devotedon the decoding complexity issue in MIMO HARQ systems(e.g., [31]–[33]). In [31], a suboptimal hard decision decodingalgorithm is utilized in MIMO HARQ systems to reducethe decoding complexity at the cost of sacrificing the BitError Rate (BER) performance. Reference [32] utilizes theSD algorithm along with off-line data at the receiver side toavoid a high computational complexity in a mapping diversitybased [34] MIMO HARQ system. However, when the datarate or the number of constellation points increases, the stored

2
off-line data occupies much more memory space than that ofan HARQ setting with a low data transmission rate. Thus,the scheme in [32] would not be a desirable protocol forlimited memory receivers. It is investigated in [33] that a lowrate Alamouti-based HARQ protocol has the computationalcomplexity advantage to other conventional HARQ protocolsin the decoding process.
In general, the decoding complexity of a MIMO HARQround n < N , based on the STBC, with an exhaustivesearch is of order O(ML), where L is the number of trans-mitted signals [4]. For the final HARQ round where allN − 1 (re)transmissions have a decoding with failure, thedecoding complexity depends on the STBC structure, sincethe full STBC is transmitted. If the nth (re)transmissionround has a successful decoding, the overall decoding com-plexity of the MIMO HARQ system will be of orderO(nML + CSTBC(M,L)δ[n−N ]
), where CSTBC(M,L) is
the order of decoding complexity for STBC and δ[m] is thediscrete delta function. Therefore, the decoding complexity ofa MIMO HARQ system seems to be a prohibitive task for largesignal constellation sizes. Even though the spectral efficiencyof a MIMO HARQ system is more effective than that of aMIMO system without HARQ, its decoding complexity ismuch higher than that of a classical MIMO system. Thisdrawback makes the use of HARQ very difficult in MIMOsystems with high data transmission rates. Therefore, it isnecessary to find effective solutions to make the decodingprocedure faster for an HARQ round n < N .
Taking the above motivation into account, in this work,we leverage the fast-decodable notion to the MIMO HARQsystems as follows:• We first define two classes of fast-decodable MIMO
HARQ protocols namely, i) Class I: independent ofSTBC and ii) Class II: dependent on STBC, in Sec-tion III. The first class uses a threshold or decisionfunction to avoid performing unnecessary detections in(re)transmission HARQ rounds. Using the actual capacityof MIMO channels, two fixed and adaptive methods arepresented as two threshold-based protocols of Class I.The effectiveness of both protocols in the computationalcomplexity reduction and the spectral efficiency preser-vation is discussed. Class I is independent of STBCstructure and suitable for any STBC based MIMO HARQsystem.
• For Class II introduced in Section IV, which establishesthe fast-decodable notion of MIMO HARQ systemsbased on the SD algorithm, the new concept “fast-decodable MIMO HARQ round” is defined and thesufficient conditions for having a fast-decodable HARQround are derived. Since the traditional SD method forfast STBCs [4] cannot directly apply to a fast HARQround, we propose a new fast SD algorithm which signifi-cantly reduces the computational complexity in decodingprocess of a fast HARQ round.
• The new concept “full fast-decodable MIMO HARQprotocol” is also presented for HARQ schemes in whichall HARQ rounds are fast-decodable. We also analyticallyprove the OSTBCs based MIMO HARQ settings are
Seria
l-to-P
ara
llel
Con
verto
r
Lk
Input
Bits
M-a
ry
Mo
du
lato
r
ST
BC
En
cod
er
Buffer
Para
llel-to-S
erial
Con
verto
r
Lk
Output
Bits
M-a
ry
Dem
od
ula
tor
t = n
.
.
.
.
ST
BC
Deco
der
.
.
.
.
t = n-1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1 1
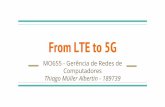
Fig. 1. A single-user MIMO HARQ wireless system with Nt transmit andNr receive antennas.
full fast-decodable. Moreover, we show that the numberof full fast-decodable OSTBCs based MIMO HARQsettings increases exponentially when the number oftransmit antenna increases.
• In Section V, we conduct some simulations to illustratethe effectiveness of the proposed methods in both classes,for having a significant reduction in the decoding com-plexity of MIMO HARQ systems.
Notations: Throughout this paper, we use normal lettersfor scalars. Matrices and column vectors are set in boldcapital and lower-case letters, respectively. The set of oddGaussian integers is denoted by Zodd[i]. A complex Gaussianrandom variable with mean µ and variance σ2 is denoted byCN (µ, σ2). Operation ⊕ denotes sum modulo-2. Finally, thedot or inner product of two vectors x = [x1, ..., xn]
T andy = [y1, ..., yn]
T is defined as ⟨x,y⟩ , xH .y =∑n
i=1 xi∗yi.
II. SYSTEM MODEL AND FRAMEWORK DESCRIPTION
In this work, we consider a single-user MIMO wirelesssystem consisting of Nt transmit and Nr receive antennas.The model uses an HARQ scheme where it is assumed thata noiseless feedback channel with a negligible delay existsbetween the transmitter and the receiver. This assumption isalso used in references [11], [17], [20], [23].
A. Transmitter
The underlying MIMO wireless transmitter is equippedwith an STBC encoder that takes L symbols at its inputfor the data transmission. For the system model depicted inFig. 1, the serial-to-parallel convertor divides each packetof size Lk information bits into L parallel binary streamsBi , (bi1, ..., bik), i = 1, ..., L, where bij ∈ {0, 1} and k is thecardinality of Bi. Each bit stream Bi is mapped into the symbolsi ∈ Zodd[i] using a preassigned M -ary modulation schemewhere it is assumed that E[|si|2] = Es. The STBC encodertakes L modulated signals as its inputs and generates thecodeword matrix X = [x1 ... xT ]Nt×T for T time slots. Thestored matrix X in the transmit buffer is divided into N sub-codewords {X(n) = [xτ(n−1)+1 ... xτ(n) ]Nt×T (n)} N
n=1, eachcorresponding to the (re)transmitted data at the nth HARQround and T (n) is the number of assigned time slot(s) at the
nth HARQ round such thatN∑
n=0
T (n) = T , τ (n) ,n∑
i=0
T (i), and

3
T (0) , 0. In particular, the first sub-codeword of matrix X,denoted by X(1) = [xτ(0)+1 ... xτ(1) ]Nt×T (1) , is picked fromthe transmit buffer and then transmitted through Nt transmitantennas at the first HARQ round.
Once an ACKnowledege (ACK) signal was sent back by thereceiver, the data in the buffer is removed and a new packet ofinformation will be transmitted. Otherwise, for the case wherethe receiver feeds back a Negative ACKnowledgment (NACK)signal to the transmitter, the second sub-codeword of matrixX denoted by X(2) = [xτ(1)+1 ... xτ(2) ]Nt×T (2) is drawnfrom the transmit buffer and is sent as the first retransmissionpacket.
The procedure of the packet retransmission is still repeatedtill the ACK signal is fed back to the transmitter or themaximum allowable (re)transmission round, i.e., N is reached.In the latter case, if the decoding is still with failure, the erroris declared and a new packet of information is coded andtransmitted. In practical situation, the decoding process is onlyperformed in the final retransmission round and error detectionis not required.
B. Receiver
Let H(n) = [h(n)i,j ]Nr×Nt denote the channel matrix as-
sociated with the nth (re)transmission round whose entries{h(n)
i,j }Nr,Nt
i,j=1 ∼ CN (0, 1) are independent and identically dis-tributed (i.i.d) random variables. It is assumed that the channelmatrix is constant over N consecutive (re)transmission rounds,i.e., H(n) = H ∀n = 1, 2, ..., N , and the perfectly estimatedchannel coefficients are available at the receiver side but not atthe transmitter side. This assumption is reasonable due to thefact that the variations of the channel are slow and therefore,the channel estimation can be easily performed by transmittingknown pilots or training signals to the receiver [35], [36, p. 7].In addition, we denote W(n) = [w
(n)i,j ]Nr×T (n) as the additive
white Gaussian noise matrix in the nth (re)transmission roundwhere {w(n)
i,j }Nr,T
(n)
i,j=1 ∼ CN (0, 1) are i.i.d. random variables.Taking the above considerations into account, the Nr × T (n)
received signal matrix Y(n) at the nth (re)transmission roundis considered as
Y(n) =
√ρ
NtEsHX(n) + W(n), ∀n = 1, 2, ..., N, (1)
where ρ indicates the average received Signal-to-Noise Ratio(SNR) at each receiver antenna, and X(n) is the transmittedsub-matrix at the nth (re)transmission round.
To decode the transmitted signal vector s = [s1 s2 ... sL]T
with a complex SD algorithm [37], the received signal matrixY(n) in (1) can be rewritten as the following equivalent form:
y(n) =
√ρ
NtEsH(n)s+w(n), ∀n = 1, 2, ..., N, (2)
where the NrT(n) × L matrix H(n) is the equivalent channel
matrix at the nth (re)transmission round whose entries dependon the structure of the STBC and the channel matrix H(n). TheNrT
(n)×1 signal vectors y(n) and w(n) denote the equivalentreceived signal vector and the equivalent noise vector at thenth (re)transmission round, respectively.
To benefit from the diversity advantage, all the receivedsignal matrices Y(n) are saved in the receive buffer if theNACK signal is sent back in the nth HARQ round. Hence,it is necessary to form a transceiver model based on thereceived signal matrices {Y(i)}ni=1, where n 6 N is thecurrent (re)transmission round. To this end, we collect theequivalent signal vectors {y(i)}ni=1 in an Nrτ
(n) × 1 newvector y(n) as follows:
y(n) =
y(1)
...y(n)
=
√ρ
NtEs
H(1)
...H(n)
︸ ︷︷ ︸
,H(n)
s+
w(1)
...w(n)
︸ ︷︷ ︸
,w(n)
=
√ρ
NtEsH(n)s+w(n), (3)
where the Nrτ(n)×L matrix H(n) and the Nrτ
(n)× 1 signalvector w(n) are called the equivalent channel matrix andthe equivalent noise vector after n (re)transmission rounds,respectively. Note that since after N (re)transmission rounds,all sub-matrices of matrix X are transmitted during T timeslots, the equivalent channel matrix H(N) is equal to theequivalent channel matrix of a full STBC denoted by H.
An “incomplete” decoder [20] is utilized upon the receptionof the signal vector y(n), n < N , where it finds the set ofsignal vectors S = {s| ||y(n) − H(n)s||2F ≤ d(n)}, whered(n) = Nrτ
(n)(1 + log ρ). If S includes only one element,it means that the channel is not in outage and the noise istypical [20]. Hence, the decoding is performed successfullyand an ACK signal is sent back to the transmitter to request anew packet of data in the next transmission round. Otherwise,when S includes more than one signal or is empty, it meansthat the channel is poor and/or the noise is not typical. Forthis case, the decoding process is failed and a NACK signalis fed back to the transmitter for the retransmission requestof the same information packet in the next round. Note thatin the latter case, the received signal vectors are stored in thereceive buffer (in terms of the symbol level) and will be usedfor the decoding process in the next retransmission round.
Objective: The main objective of this paper is to reducethe decoding complexity of the MIMO HARQ protocol suchthat the data transmission rate of the proposed system ispreserved in all SNR ranges. To address this issue, we considerthe average Number of Visited Points (NVPs) [5], [6] by adecoder as a complexity measure throughout of the paper.In addition, the spectral efficiency of a transmitted packet isdefined as the ratio of the transmitted information bits, i.e.,L log2(M), per the number of reached channel use intervals ina (re)transmission round with successful decoding or the finalretransmission round, i.e., τ (ns) where ns is the number ofpossibly (re)transmission rounds for a successful decoding orN . Therefore, the spectral efficiency for a transmitted packet,denoted by S , could be written as S = L log2(M)
τ(ns) .
III. STBC-INDEPENDENT FAST-DECODABLE MIMOHARQ PROTOCOLS
The decoding complexity of a MIMO HARQ system couldbe categorized into two cases: i) the decoding complexity

4
before the final retransmission round, and ii) the decodingcomplexity at the final retransmission round. For the first case,the computational complexity is of order O(nML) for thenth < N (re)transmission rounds when an exhaustive searchis applied. The computational complexity of the second caseis the same as that of the STBC since the whole STBC istransmitted in the final retransmission round. Therefore, it isreasonable to seek various solutions which reduce the amountof decoding complexity for the first case. Since the proposedMIMO HARQ protocols are applicable to STBCs either withgeneral structure or especial structure, we classify our methodsinto two classes: i) Class I: Independent of STBC and ii) ClassII: Dependent on STBC.
Before presenting the details of Class I, we first elaboratethe key idea behind the proposed protocol. Let CMIMO, CSTBC,and R(n) denote the actual channel capacity of an Nt × Nr
MIMO system, the maximum mutual information achieved byan Nt ×Nr STBC, and the data transmission rate at the nth
HARQ round, respectively, for a specific value of the SNR.It is a well known fact that CSTBC ≤ CMIMO as shown in[38]. Let us consider the case where the instantaneous outageis occurred, i.e., R(n) > CMIMO. It is reasonable to say thatthe error is occurred with a high probability since R(n) >CMIMO > CSTBC. On the other hand, the error is not certainlyoccurred when R(n) < CMIMO, since i) the data transmissionrate at the nth (re)transmission round may be greater thanCSTBC, and ii) the error may be caused by the atypical noise.Hence, a decision needs to be made whether the ACK signalshould be fed back or NACK in the non-outage case.
Based on the above observation, we present the followingthreshold or decision function for the Class I:{
Send NACK without decoding, F (H) < γ(n),
Determine ACK or NACK with decoding, F (H) > γ(n),(4)
where F (H) is a scalar function of H and γ(n) represents theamount of threshold in the nth < N (re)transmission round.When the channel is poor at the current (re)transmission roundn, i.e., F (H) < γ(n), the MIMO HARQ system feedbacks aNACK signal without using the incomplete decoder. On theother hand, the incomplete decoder performs the common errordetection process when the channel is in a good condition.The parameter γ(n) has a crucial effect on both decodingcomplexity and the average spectral efficiency preservation.
Depending on the choice of γ(n), two threshold-basedMIMO HARQ protocols are proposed:• Fast-Decodable MIMO HARQ Protocol with a Fixed
Threshold: In this type of threshold-based MIMOHARQ system, one can choose the Frobenius normF (H) = ||H||2F or the condition number Con(HHH)
if Nr ≤ Nt or Con(HHH) if Nr > Nt as the thresholdfunctions and the parameter γ(n) as a constant parameter.We will show numerically that a considerable reductionin the computational complexity, without affecting on theBER performance, would be provided if the parameterγ(n) is properly selected. Although a large value ofγ(n) provides a lower decoding complexity, the spectralefficiency has more losses due to the increase in the
probability of the event ||H||2F < γ(n).In this paper, we prefer to use the Frobenius norm basedon the following reasons:
– Both methods could achieve the same results if theparameter γ(n) is properly selected. Parameter γ(n)
has a crucial effect on the performance metrics ofthe fixed threshold based MIMO HARQ protocols.
– The condition number is more restrictive than theFrobenius norm since it cannot be utilized for theMISO channels.
– The computation of Frobenius norm is simpler thanthat of the condition number since the Frobeniusnorm needs O(NrNt) flops, while the conditionnumber needs O(max(Nr, Nt) × min(Nr, Nt)
2)flops due to the singular value decomposition [39,Lecture 31].
• Fast-Decodable MIMO HARQ Protocol with anAdaptive Threshold: For this case, we choose theparameter γ(n) as a function of transmission rate inthe nth HARQ round. A threshold function based onthe outage capacity is the best choice for this protocolsince the average spectral efficiency is preserved for allSNR ranges. Numerical results show that the amount ofthe complexity reduction is negligible for the high SNRregimes.
Remark 1: In practical situations where the MIMO HARQsystem works at a fixed SNR value, it is desirable to usean adaptive threshold method if the SNR is low or moderatedue to the spectral efficiency preservation with a considerablereduction in the decoding complexity. For high SNR values,one can use the fixed threshold method with a proper choiceof the parameter γ(n) such that the computational complexityreduces, while the spectral efficiency can be still preserved bythe system.
IV. STBC-DEPENDENT FAST-DECODABLE MIMO HARQPROTOCOLS
So far, we have presented two protocols for the computa-tional complexity reduction of MIMO HARQ systems. Ourproposed methods are independent of the STBC structure andare useful for any STBC. In this section, we present the secondclass of fast-decodable transmission protocols for MIMOHARQ systems based on the SD algorithm. In particular, wecall a MIMO HARQ round fast-decodable if the worst casedecoding complexity with the SD algorithm is less than theorder of O(ML). In the sequel, a fast SD algorithm and thenew notion of full fast-decodable for this class are introduced.
A. SD Algorithm for MIMO HARQ Systems
Before introducing the fast-decodable notion for MIMOHARQ systems, we need to describe how to apply the SDalgorithm for HARQ rounds. For the nth HARQ round, wedefine matrix D(n) , H(n)HH(n) where it could be full-column-rank (positive definite) or semi-positive definite. Wefirst consider the positive definite case and then describe

5
the methodology for semi-positive definite case. Due to full-column-rank, we have Nrτ
(n) ≥ L and the Cholesky factor-ization of matrix D(n) can be written as D(n) = R(n)HR(n),where n < N and R(n) = [r
(n)i,j ]L×L is an upper-triangular
matrix. Regarding the fixed radius of the incomplete decoder,the standard SD algorithm [40] cannot be directly applied. Toovercome this problem, the modified standard SD algorithmfor HARQ rounds is presented in five steps as follows:• Preliminaries: R(n), with n < N , denotes an L × L
upper-triangular matrix with r(n)i,j being its (i, j)th entry.
y˜(n) = F(y(n)) is an L × 1 vector for the nth HARQround, where F(.) is a matrix transformation which canbe determined by the Cholesky method used for the SDdecomposition. For this definition, y˜(n)i is the ith entryof vector y˜(n). d(n) = Nrτ
(n)(1+ log ρ) is the radius ofincomplete decoder at the nth HARQ round.
• Step 1: Set i = L and sL+1 = []0×0. Find the set
Si = { si = [si si+1 ... sL−1 sL]T∣∣ |r(n)i,i (y˜(n)i − si)
+r(n)i,i+1(y˜(n)i+1 − si+1) + ...+ r
(n)i,L (y˜(n)L − sL)|2 ≤ d(n)
−L∑
j=i+1
|r(n)j,j (y˜(n)j − sj) + r(n)j,j+1(y˜(n)j+1 − sj+1) + ...
+r(n)j,L(y˜(n)L − sL)|2}
for each vector si+1 = [si+1 si+2 ... sL−1 sL]T . Set
Nsi = |Si| and go to the next step.• Step 2: If Nsi > 0, decrease i = i−1 and go to the next
step. Otherwise, go to step 4.• Step 3: If i = 0, go back to step 1. Otherwise, if Nsi+1
=1, go to step 5, else go to step 4.
• Step 4: The algorithm is terminated and a NACK signalshould be fed back to the transmitter.
• Step 5: The algorithm is terminated. Si is the solutionand an ACK signal should be fed back to the transmitter.
Due to the fixed radius of the incomplete decoder, twoimportant differences exist between the standard SD algorithmand the above scheme. i) If there is no admissible (L+1−k)-dimensional, ∀ k = L,L − 1, ..., 1, point in the sphere, i.e.,Sk to be an empty set, the algorithm will be terminated bythe NACK signal instead of increasing the sphere radius inthe standard SD algorithm (Steps 1 and 2). ii) If there existmore than one L-dimensional point in the sphere, i.e., S1 hasat least two points, the algorithm again will be terminated bythe NACK signal instead of decreasing the sphere radius (Step3).
Due to the rank-deficiency of matrix D(n) in some HARQrounds, the modified SD algorithm cannot be directly utilized.In particular, the matrix D(n) is rank-deficient in the nth
HARQ round if Nrτ(n) < L and therefore, the modified stan-
dard SD algorithm is not applicable due to the zero diagonalentries r
(n)
Nrτ(n)+1,Nrτ(n)+1= ... = r
(n)L,L = 0. To address this
issue, we use the Generalized SD (GSD) algorithm in [41],[42] which first transforms the rank-deficient matrix D(n) intoa full-column-rank matrix G(n) = F(D(n), λ), where F isthe transform operator and λ is a constant parameter. Then,
the modified standard SD algorithm is applied to determinewhether the feedback signal should be ACK or NACK.
B. A Fast SD Algorithm for MIMO HARQ Systems
Inspired by the fast-decodable definition for STBCs in [4],we first provide a definition for HARQ rounds with the fastdecoding property as follows:
Definition 1 (Fast-Decodable HARQ Rounds): The HARQround n is called fast-decodable if the upper-triangular matrixR(n) in the Cholesky factorization of matrix D(n) or G(n) hasthe following condition:
r(n)i,i+1 = r
(n)i,i+2 = ... = r
(n)
i,ℓ(n)−1= r
(n)
i,ℓ(n) = 0, i = 1, 2, ..., ℓ(n)−1,(5)
where r(n)i,j is the (i, j)th entry of matrix R(n) and ℓ(n) ≤ L.
The parameter ℓ(n) is called the CRF in the nth HARQ round.
Now, we are ready to present the fast SD algorithm for MIMOHARQ systems in the following eight steps:
• Preliminaries: s = [s1 s2 ... sL−1 sL]T is an L × 1
vector where si’s belong to a signal constellation withsize M . s is the estimated vector of s. s˜ is an L−ℓ(n)×1sub-vector that includes (ℓ(n) + 1)th to Lth elements ofvector s. R(n), with n < N , denotes an L × L upper-triangular matrix which satisfies the condition in (5) with1 6 ℓ(n) 6 L. R˜ (n) is an L − ℓ(n) × L sub-matrixthat includes (ℓ(n) + 1)th to Lth rows of matrix R(n).y˜(n) = F(y(n)) is an L × 1 vector where F(.) is amatrix transformation which can be determined by theCholesky method used for the SD decomposition. It is
easy to write ||R(n)(y(n) − s)||2F = G(s˜) +ℓ(n)∑i=1
Fi(si, s˜)where Fi(si, s˜) ≥ 0 for i = 1, 2, ...ℓ(n) and G(s˜) ≥ 0.2
minS
F refers to the second minimum of a function F
over the discrete set S.• Step 1: Use the modified standard SD algorithm with
L−ℓ(n) levels 1 to find set S˜ = {s˜| ||R˜ (n)(y˜(n)−s)||2F ≤d(n)}. Set Ns˜= |S˜| and go to the next step.
• Step 2: If Ns˜ ≥ 1, set j = 1, p = 0 and go to the nextstep. Otherwise, go to step 7.
• Step 3: If G(s˜j) +ℓ(n)∑i=1
minsi∈Zodd[i]
Fi(si, s˜j) ≤ d(n), where
s˜j is the jth element of set S˜, set p = p ⊕ 1 and go tothe next step. Otherwise, go to step 6.
• Step 4: If p = 1, save each Fi(si, s˜j), eachmin
si∈Zodd[i]Fi(si, s˜j), G(s˜j), s, and go to the next step.
Otherwise, go to step 7.
1Since all elements of vector s should not be estimated by the modifiedstandard SD algorithm, the conditions i = 0 and Nsi+1
= 1 in Step 3 ofthe modified standard SD algorithm change to i = ℓ(n) and Nsi+1
≥ 1,respectively. Steps 4 and 5 are removed and the output of algorithm is allsatisfied vectors in set Si.

6
TABLE IDIFFERENT FULL FAST-DECODABLE MIMO HARQ PROTOCOLS BASED ON OSTBC FOR THREE TRANSMIT ANTENNAS
Protocol No. First Round Second Round Third Round
1 X(1) =
x1 −x2
∗
x2 x1∗
x3 0
X(2) =
−x3
∗
0
x1∗
X(3) =
0
−x3∗
x2∗
2 X(1) =
x1 −x2
∗
x2 x1∗
x3 0
X(2) =
−x3
∗ 0
0 −x3∗
x1∗ x2
∗
—–
3 X(1) =
x1 −x2
∗ −x3∗
x2 x1∗ 0
x3 0 x1∗
X(2) =
0
−x3∗
x2∗
—–
• Step 5: If mink=1,2,...ℓ(n)
{G(s˜j) +2
minsk∈Zodd[i]
Fk(sk, s˜j) +
ℓ(n)∑i=1i =k
minsi∈Zodd[i]
Fi(si, s˜j)} > d(n), go to the next step.
Otherwise, go to step 7.• Step 6: Increase j = j + 1. If j ≤ Ns˜ go back to step
3. Otherwise, if p = 1 go to step 8, else go to step 7.• Step 7: The algorithm is terminated and a NACK signal
should be fed back to the transmitter.• Step 8: The algorithm is terminated. s is the solution and
an ACK signal should be fed back to the transmitter.
Remark 2: The key idea behind the proposed fast SD al-gorithm is to avoid exhaustive search through all candidatevectors for the error detection procedure in MIMO HARQsystems. In particular, after the set S˜ is found by the modifiedstandard SD algorithm with L− ℓ(n) levels, ℓ(n) ML metricsare separately computed to find the minimum of functionsFi(si, s˜j) for each s˜j ∈ S˜. Clearly, if the inequality in step 3is not true, other possible combinations of functions Fi(si, s˜j)would not be in the hyper-sphere. On the other hand, when theinequality in step 3 is satisfied, the uniqueness of the solutionwill be checked in step 5. To this end, the second minimum ofcost function ||R(n)(y(n)− s)||2F is found and compared withthe radius d(n). If it is greater than d(n), the obtained vectorwould be unique; otherwise, an error would be detected.
Remark 3: Based on discussions in Remark 2, we cannow determine the worst-case computational complexity ofthe HARQ round n < N by the following considerations: i)In Step 1, the worst-case computational complexity of the SDalgorithm, which is used to find the candidate vectors s˜j’s, isof order O(ML−ℓ(n)
) [4]. ii) For a selected candidate vectors˜j , ℓ(n) linear ML metrics are utilized to examine whethers˜j lies in the hyper-sphere or not. Clearly, the computationalcomplexity is of order O(ℓ(n)M) for each examined s˜j . iii)To obtain the complexity order in Step 5, we first note thattwo terms of the expression are computed and saved in Steps
3 and 4. Since2
minsk∈Zodd[i]
Fk(sk, s˜j) is the only term calculated
ℓ(n) times in Step 4, the computational complexity of thisstep is of order O(ℓ(n)M). Note that the terms in Step 4 andthe calculations in Step 5 are saved and performed at most
one time, respectively. According to above considerations,the overall computational complexity of the algorithm, in theworst-case, is of order O(ℓ(n)M(ML−ℓ(n)
+ 1)). For a largesignal constellation, this amount of complexity approaches toO(ℓ(n)ML−ℓ(n)+1) which is the same result as found in [4]for a classical STBC with the fast decoding property.
Remark 4: As previously mentioned, the decoding proce-dure for the final retransmission round is the same as thatof the STBC case. Hence, if the utilized STBC for a MIMOHARQ system satisfies the conditions in Definition 1, the samefast-decodable algorithms for the STBCs (e.g., [4]) can bedirectly applied when n = N .
In order to examine the fast decodable property of a MIMOHARQ round, we need sufficient conditions in terms of theequivalent channel matrix H(n).
Theorem 1 The MIMO HARQ round n with the equivalentchannel matrix H(n) is fast-decodable if only elements ofmatrix H(n) yield the following equations:
⟨h(n)i ,h
(n)i+1⟩ = ⟨h(n)
i ,h(n)i+2⟩ = ... = ⟨h(n)
i ,h(n)
ℓ(n)−1⟩
= ⟨h(n)i ,h
(n)
ℓ(n)⟩ = 0, i = 1, 2, ..., ℓ(n) − 1, (6)
where h(n)i denotes the ith column of matrix H(n).
Proof: See Appendix A.
C. Examples of Fast-Decodable MIMO HARQ Protocols
We begin the subsection by giving a definition for fast-decodable MIMO HARQ protocols as follows:
Definition 2 (Fast-Decodable MIMO HARQ Protocols): AMIMO HARQ protocol is fast-decodable of degree K with1 ≤ K ≤ N , if it has K fast-decodable HARQ rounds. For thecase where K = N , the protocol is called full fast-decodable.
To elaborate more deeply on the fast-decodable notion inMIMO HARQ systems, we provide some examples basedon the OSTBCs. To generalize the results, the OSTBCsin [43] are considered due to providing the maximum ratewith a systematic approach. Two constraints are used in ourexamples: i) all information symbols must be transmitted atthe first transmission round. This constraint is not necessary

7
for other retransmission rounds, and ii) we only study thetransmission strategies which are full fast-decodable.
Table I displays different full fast-decodable MIMO HARQprotocols based on the OSTBC for three transmit antennas. Toshow the full fast-decodable property for these protocols, onecan readily use the results of Theorem 1. It is seen that theworst case decoding complexity is of order O((M+1)ML−1)for all (re)transmission rounds. However, the spectral effi-ciency performance of these protocols are different due to thedifference in the number of HARQ rounds and the numberof assigned time slots in each HARQ round. In particular, theprovided average spectral efficiency by protocol No. 1 is moreefficient than that of protocols No. 2 and 3 since one time slotis assigned at retransmission rounds.
As a result extracted from Table I, the problem of construct-ing the full fast-decodable protocols from OSTBCs could beconsidered as choosing different sub-matrices from the originalmatrix X such that the condition in (5) for each HARQ roundn with a CRF 1 < ℓ(n) ≤ L is satisfied. It is worth mentioningthat the proper selection of the first sub-matrix X(1) for n = 1guarantees the fast-decodability of other retransmission roundsapart from the selection manner of other sub-matrices. Thefollowing theorem proves this assertion:
Theorem 2 An Nt×Nr MIMO HARQ protocol with N HARQrounds which uses an Nt×T OSTBC with Nt ≥ 3 is full fast-decodable if only the first two columns of matrix OSTBC ischosen for the first transmission round.
Proof: See Appendix B.
Although an exact description of all different full fast-decodable MIMO HARQ protocols for three transmit antennashas been provided in Table I, it is not an easy task for morethan three transmit antennas due to the exponential increasein the number of full fast-decodable protocols. This claim isproved by the following theorem:
Theorem 3 Consider an Nt ×Nr full fast-decodable MIMOHARQ protocol which uses an Nt×T OSTBC matrix X withNt ≥ 3. It is also assumed that two first columns of matrixX are assigned in the first transmission round. For such aprotocol, the number of different full fast-decodable MIMOHARQ protocols, in the sense of the number of assigned timeslots, is equal to 2T−T
(1)min − 1 where T
(1)min is the minimum
required number of time slots for having a fast-decodableround when n = 1.
Proof: See Appendix C.
Theorem 3 expresses that the number of different full fast-decodable MIMO HARQ protocols increases exponentiallywith the difference of the parameters T and T
(1)min ≥ 2, where
the lower bound on the T(1)min is obtained as a consequence of
Theorem 2. A numerical description of the number of full fast-decodable MIMO HARQ protocols including the parametersNt, T , and T
(1)min are listed in Table II. As seen from this table,
an increase in the number of transmit antennas Nt leads to alarge difference between parameters T and T
(1)min, therefore,
a huge number of different full fast-decodable protocols arepossible even for a moderate value of Nt.
TABLE IINUMBER OF DIFFERENT FULL FAST-DECODABLE MIMO HARQ
PROTOCOLS IN TERMS OF Nt , T , AND T(1)min .
Nt T T(1)min 2T−T
(1)min − 1
3 4 2 3
4 8 3 31
5 15 4 2047
6 30 6 16777215
V. SIMULATION RESULTS
In this section, we present some simulation results toevaluate the average spectral efficiency, in terms of the Bit PerChannel Use (BPCU), the average NVPs and the BER of theproposed HARQ schemes for 3×1 Multi-Input Single-Output(MISO) and 3 × 2 MIMO systems. In all simulations, weuse the Monte-Carlo approach to derive the average spectralefficiency, BER, and NVPs versus the SNR. To preserve theSNR value ρ for each receive antenna, we assume that theaverage power of each symbol si, the variances of the channelcoefficients hi,j’s and the noise samples ni,j’s are normalizedto unit. The channel matrix H(n) is also assumed to beconstant during N (re)transmission rounds of a packet andchanges independently from one packet to the next.
TABLE IIISIMULATION PARAMETERS
γ(1)
Protocol Name Nr = 1 Nr = 2
Fixed Threshold HARQ I 1 5
Fixed Threshold HARQ II 2 6
We compare the the decoding complexity, the spectral effi-ciency and the BER performances of the original HARQ withthose of the MIMO HARQ schemes in Table I under differentthreshold-based protocols. For simplicity, the case “withoutany transmission protocol” is called the original HARQ.It should be noted that the threshold-based MIMO HARQprotocols are not restricted to the OSTBCs schemes and can beapplied to all other STBCs. As proved and compared in [23],using the capacity lossless STBCs in the STBC based HARQsettings achieves the best spectral efficiency. For example,Alamouti based HARQ system provides the best spectralefficiency among other 2 × 1 MIMO system. Obviously, formore than two transmit antennas, the MIMO HARQ systemsbased on the full-rate STBCs, such as QOSTBCs [44], providea better spectral efficiency than the OSTBCs. For the adaptivecase, we use threshold function F (H) = det(INr +
ρNt
HHH)
with γ(n) = 2L log2 M
τ(n) and we test the threshold functionF (H) = ||H||2F with γ(1)’s of Table III and γ(2) = 0.1γ(1) forthe fixed threshold scheme.2 In the (re)transmission round n <N , the exhaustive search is utilized for Class I such that upon
2The thresholds of the fixed protocol are derived using the try and errormethod.

8
visiting the second point, the decoding procedure is stoppedand a NACK signal is fed back to the receiver. Moreover, alinear ML decoder is used at the final retransmission rounddue to the orthogonality property of the OSTBCs.
0 5 10 15 20 25 303
3.5
4
4.5
5
5.5
6
SNR (dB)
Ave
rage
Spe
ctra
l Eff
icie
ncy
(BPC
U)
Original HARQ; Nr= 1
Adaptive HARQ; Nr= 1
Threshold HARQ I; Nr= 1
Threshold HARQ II; Nr= 1
Original HARQ; Nr= 2
Adaptive HARQ; Nr= 2
Threshold HARQ I; Nr= 2
Threshold HARQ II; Nr= 2
(a) Average spectral efficiency (BPCU) versus SNR
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 300
2000
4000
6000
0 5 10 15 20 250
2000
4000
6000
8000
SNR (dB)
Ave
rage
No.
Vis
ited
Poin
ts b
y th
e E
xhau
stiv
e Se
arch
Original HARQ; Nr= 1
Adaptive HARQ; Nr= 1
Threshold HARQ I; Nr= 1
Threshold HARQ II; Nr= 1
Original HARQ; Nr= 2
Adaptive HARQ; Nr= 2
Threshold HARQ I; Nr= 2
Threshold HARQ II; Nr= 2
(b) Average NVPs by the exhaustive search versus SNR
0 5 10 15 20 25 30
10−8
10−6
10−4
10−2
100
SNR(dB)
BE
R
Original HARQ; Nr= 1
Adaptive HARQ; Nr= 1
Threshold HARQ I; Nr= 1
Threshold HARQ II; Nr= 1
Original HARQ; Nr= 2
Adaptive HARQ; Nr= 2
Threshold ARQ I; Nr= 2
Threshold ARQ II; Nr= 2
(c) BER versus SNR
Fig. 2. 3 × 1 MISO and 3 × 2 MIMO HARQ systems based onthe OSTBC under different threshold-based protocols with 16-QAMconstellation.
Figs. 2(a), (b) and (c) compare the average spectral ef-ficiency, the average NVPs and the BER of 3 × 1 MISOand 3 × 2 MIMO HARQ systems with different threshold-based protocols under the transmission scheme 1 from Table I,
respectively. In comparison with the original HARQ method,the average spectral efficiency is preserved by the adaptivecase in all SNR ranges, while it is lost when a fixed thresholdis utilized. On the other hand, in the low and moderate SNRregimes, the adaptive protocol provides the lowest decodingcomplexity among other threshold-based methods. Therefore,the adaptive protocol yields the best performance for a MIMOHARQ system which works in the low and moderate SNRranges. For high SNR regimes, the average NVPs of adaptivethreshold-based tends to that of the original HARQ. To provethis fact, we consider the lower bound [45, p. 55] for thethreshold function of adaptive protocol as follows:
det(INr +ρ
NtHHH) ≥ (1 + (
ρ
Nt)P
P∏i=1
µi), (7)
where µi’s> 0 are the non-zero eigenvalues of matrix HHH
and P ≤ min(Nt, Nr). Obviously, the lower bound in (7)tends to infinity when SNR goes to infinity. Hence, F (H)is always greater than γ(n) and the average NVPs of boththe original HARQ and the adaptive HARQ coincide witheach other in this asymptotic regime. Since the lower boundincreases as the P th power of the SNR, the average NVPsof the adaptive HARQ tends to that of the original HARQwith a faster rate when Nr < Nt increases till Nr < Nt (seeFig. 2(b)). Overall, a fixed threshold protocol which brings alower decoding complexity with an acceptable loss of spectralefficiency yields the best choice for high SNR ranges.
Fig. 2(c) shows that all the proposed schemes have a similarBER performance as compared to that of the original scheme.To clarify this, we note that the spectral efficiency of theadaptive method is the same as that of the original case in allSNR ranges (see Fig. 2(a)). Therefore, the BER performancesof both methods are not different since outage and non-outageevents can be correctly identified by the original (with a moredecoding complexity) and the adaptive (with a less decodingcomplexity) methods. For the fixed threshold method, the samescenario as that of the adaptive case is repeated in the lowSNR ranges. In the moderate and high SNR regimes, thespectral efficiency has a loss due to identifying some non-outage events as outage. However, since the undetected errorof the incomplete decoder is very small in moderate and highSNR ranges, the BER performances of both the original andthe fixed threshold HARQ methods are same.
To give a comparison between the transmission schemesin Table I, Figs. 3(a) and (b) compare the average spectralefficiency and the average NVPs of these schemes under theadaptive protocol, respectively. As seen from the figures, thescheme 1 provides the best spectral efficiency in comparisonto other schemes in all SNR ranges. However, this advantageis gained at the cost of more decoding complexity as shownin Fig. 3(b). In addition, the scheme 2 achieves a betterspectral efficiency than that of the scheme 3 for high SNRvalues, while it keeps a lower decoding complexity than thatof the scheme 3. In order to resolve this contradiction, ananalysis is performed for both average spectral efficiencyand average complexity order in the MISO case. For the ith
scheme, i = 2, 3, let denote the probabilities P{||H||2F > γi}

9
0 5 10 15 20 25 303
3.5
4
4.5
5
5.5
6
SNR (dB)
Ave
rage
Spe
ctra
l Eff
icie
ncy
(BPC
U)
Scheme No. 1; Nr= 1
Scheme No. 2; Nr= 1
Scheme No. 3; Nr= 1
Scheme No. 1; Nr= 2
Scheme No. 2; Nr= 2
Scheme No. 3; Nr= 2
(a) Average spectral efficiency (BPCU) versus SNR
0 5 10 15 20 25 300
1000
2000
3000
4000
5000
6000
7000
SNR (dB)
Ave
rage
No.
Vis
ited
Poin
ts b
y th
e E
xhau
stiv
e Se
arch
Scheme No. 1; Nr= 1
Scheme No. 2; Nr= 1
Scheme No. 3; Nr= 1
Scheme No. 1; Nr= 2
Scheme No. 2; Nr= 2
Scheme No. 3; Nr= 2
(b) Average NVPs by the exhaustive search versus SNR
0 5 10 15 20 25 3010
−7
10−6
10−5
10−4
10−3
10−2
10−1
100
SNR(dB)
BE
R
Scheme No. 1; Nr=1
Scheme No. 2; Nr=1
Scheme No. 3; Nr=1
Scheme No. 1; Nr=2
Scheme No. 2; Nr=2
Scheme No. 3; Nr=2
(c) BER versus SNR
Fig. 3. OSTBC MISO/MIMO HARQ systems under differenttransmission schemes of Table I with 16-QAM constellation.
and P{successful decoding | ||H||2F > γi} by pi and qi,respectively. 3 It is not hard to see that the average spectralefficiency, denoted by Si, and the average complexity order,
3For the adaptive protocol in MISO case, one can write F (H) = ||H||2Fand γ(n) = Nt
ρ(2
L log2 M
τ(n) − 1).
TABLE IVTHE NUMERICAL VALUES OF pi’S AND qi’S IN DIFFERENT SNRS. ALL
NUMBERS ARE ROUNDED BY THE ACCURACY 10−4 OR 10−5
SNR (dB) p2 q2 p3 q3 p2q213p3q3
12 0.0005 0.0793 0.4578 0.0485 0.00004 0.0074
14 0.0196 0.0513 0.7086 0.0806 0.0010 0.0190
16 0.1548 0.0718 0.8913 0.1864 0.0111 0.0554
18 0.4260 0.0815 0.9638 0.3317 0.0347 0.1066
20 0.7090 0.1292 0.9864 0.4826 0.0916 0.1587
22 0.8778 0.2190 0.9970 0.6565 0.1922 0.2182
24 0.9585 0.3547 0.9990 0.7827 0.3400 0.2606
26 0.9875 0.5100 0.9998 0.8732 0.5036 0.2910
28 0.9964 0.6590 0.9999 0.9301 0.6566 0.3100
30 0.9990 0.7787 1.0000 0.9631 0.7779 0.3210
denoted by Ci, of the ith scheme could be written as follows:
Si =3 log2 M
4(1− piqi) +
3 log2 M
ipiqi, (8)
Ci = 3M(1− piqi) +M3pi. (9)
Using equation (8) and after some manipulations, we have
S2 > S3 ⇔ p2q2 >1
3p3q3. (10)
Expression (10) provides a comparison measure for findingthe scheme with a higher spectral efficiency. A numericalevaluation of the above condition is given in Table IV whereit is seen that p2q2 < 1
3p3q3 when the SNR is equal or smallerthan 22 and p2q2 > 1
3p3q3 if the SNR is greater than 22. Theresult is completely in agreement with our simulation in Fig.3(a). It is also interesting to investigate the average complexityorder for schemes 2 and 3. With a similar calculation for Si’s,we have
C2 < C3 ⇔ p2(M2 − 3q2) < p3(M
2 − 3q3). (11)
For a relatively large constellation size, it is reasonable toapproximate M2−3qi by M2 and get to the following result:
C2 < C3 ⇔ p2 < p3. (12)
Due to the greater value of threshold for scheme 2, p2 < p3and therefore, C2 < C3. However, as the SNR tends to infinity,the threshold value of both schemes goes to zero. Hence, pi’stend to one and Ci’s asymptotically coincide each other inhigh SNR regimes.
Fig. 3(c) compares the BER performances of differentHARQ schemes in Table I under the adaptive thresholdmethod. As seen from this figure, the BER performances ofdifferent schemes are same again in all SNR ranges. To verifythe result, we express the error probability of ith scheme,denoted by Pi(e), i = 1, 2, 3, as follows:
Pi(e) = Pi(e|F (H) < γ1)P(F (H) < γ1) + Pi(e|γ1 < F (H) < γ2)
×P(γ1 < F (H) < γ2) + Pi(e|F (H) > γ2)P(F (H) > γ2), (13)
where γ1 = 14γ2 = 16. The error probability Pi(e|F (H) < γ1)
is same for all three schemes since the outage event occurs andthe HARQ schemes retransmit data, similar to a full OSTBC,with the same data rate. This observation shows that why

10
the spectral efficiencies and the BER performances of threeschemes are same for low SNR ranges where most of dataare retransmitted in the outage event (see Fig. 3(a) where thespectral efficiency of all three schemes are 3 bits/s/Hz in lowSNR ranges).
The error probability Pi(e|γ1 < F (H) < γ2) is same fori = 1, 3, since schemes 1 and 3 face with the non-outageevent and utilize a similar incomplete 3 × 3 OSTBC matrix(see Tables I and III) for the retransmission in the secondand transmission in the first HARQ rounds, respectively. Notethat due to the non-typical noise or codeword error, a failuredecoding maybe happened for both schemes and hence, thedata is retransmitted again in the final retransmission round.Under this condition, the outage event is still observed by thesecond scheme and its data rate is the same as that of the finalretransmission round. However, the only event, which can bemade a difference between the error probabilities of schemes1, 3 and scheme 2, is the undetected error probability of theincomplete decoder in schemes 1 and 2. Since the undetectederror probability is very low in moderate SNR values, wherethe event γ1 < F (H) < γ2 is more probable, its influence onthe error probability is not significant. By a similar argument,it is easy to show that the error probabilities Pi(e|F (H) > γ2)is same for i = 1, 2 and are very close to that of the scheme3 due to the negligible undetected error of the incompletedecoder in high SNR values.
As seen from the above figures, the average NVPs are notmonotonic with SNR. This behavior could be verified usingCi in (9) and the values pi, qi, and piqi of Table IV. Inlow SNR ranges, since the outage event is occurred in mostof transmissions, the values of pi and piqi are very small,hence, the linear term in (9) is dominant. Ci monotonicallyincreases when SNR grows due to increase in the coefficientof the cubic term in (9). However, the coefficient of the linearterm decreases such that a maximum value is imposed on theaverage NVPs. When the maximum value of Ci reaches, Ci
decreases such that it can be only expressed by the cubic termin (9) due to the vanished linear coefficient.
Finally, Fig. 4 compares the spectral efficiency and the com-plexity metrics between the original HARQ, fast SD HARQprotocol, and the combination protocol of adaptive threshold-based and fast SD protocols, respectively. As seen from thefigure, for all cases, the fast-decodable approach provides asignificant reduction in the average NVPs in comparison tothe original HARQ. In addition, the provided average NVPsof the combination method is lower than those of both originalHARQ and fast SD HARQ protocol in low and moderate SNRranges. For high SNR ranges, the average NVPs of fast SDHARQ and combined HARQ protocols get closer togetherwith respect to the performed analysis for Fig. 2.
VI. CONCLUSION
In this paper, we presented two classes of fast-decodableMIMO HARQ systems. For the first class, namely independentof the STBC, two threshold-based protocols were introducedand their effectiveness in the computational complexity reduc-tion and the spectral efficiency preservation were discussed.
0 5 10 15 20 25
2
3
4
5
6
7
8
9
10
SNR (dB)
Ave
rage
Spe
ctra
l Eff
icie
ncy
(BPC
U)
Orig. ARQ; NO. 1; Nr=1
SD ARQ; NO. 1; Nr=1
Orig. ARQ; NO. 2; Nr=1
SD ARQ; NO. 2; Nr=1
Orig. ARQ; NO. 1; Nr=2
SD ARQ; NO. 1; Nr=2
Orig. ARQ; NO. 2; Nr=2
SD ARQ; NO. 2; Nr=2
Combined ARQ; NO. 1; Nr=1
Combined ARQ; NO. 2; Nr=1
Combined ARQ; NO. 1; Nr=2
Combined ARQ; NO. 2; Nr=2
(a) Average spectral efficiency (BPCU) versus SNR
0 5 10 15 20 250
50
100
150
200
250
300
350
400
SNR (dB)
Ave
rage
No.
of
Vis
ited
Poin
ts
Orig. ARQ; NO. 1; N
r=1
SD ARQ; NO. 1; Nr=1
Orig. ARQ; NO. 2; Nr=1
SD ARQ; NO. 2; Nr=1
Orig. ARQ; NO. 1; Nr=2
SD ARQ; NO. 1; Nr=2
Orig. ARQ; NO. 2; Nr=2
SD ARQ; NO. 2; Nr=2
Combined ARQ; NO. 1; Nr=1
Combined ARQ; NO. 2; Nr=1
Combined ARQ; NO. 1; Nr=2
Combined ARQ; NO. 2; Nr=2
(b) Average NVPs versus SNR
Fig. 4. A comparison between the fast implementation and theexhaustive search of a MISO/MIMO HARQ system; 4-QAM con-stellation.
For the dependent class, a fast SD algorithm was proposed andit was shown that a significant reduction in the computationalcomplexity of a MIMO HARQ system can be achieved bythis fast algorithm. Two new concepts namely, fast-decodableHARQ round and full fast-decodable HARQ protocol wereintroduced and the conditions, in terms of the equivalent chan-nel matrix, under which a MIMO HARQ protocol is full fast-decodable were obtained. We also presented an example of fullfast-decodable MIMO HARQ system based on the OSTBCs.For a MIMO HARQ system with the OSTBC scheme, itwas analytically proved that a proper selection of the firsttransmission codeword leads to the fast-decodability of otherretransmission rounds. We also showed that the number ofdifferent full fast-decodable MIMO HARQ settings increasesexponentially with the difference of parameters T and T
(1)min
such that it is not feasible to simply provide all full fast-decodable protocols for a MIMO HARQ system except for

11
the case of three transmit antennas. Finally, simulation resultsshowed that the proposed protocols, including both dependentand independent classes, provide a significant reduction in thedecoding complexity of a MIMO HARQ system.
APPENDIX
A. Proof of Theorem 1
We first prove the theorem for the case where D(n) =H(n)HH(n) is a positive definite matrix and then show thatthe theorem is still valid for the semi-positive definite case.
Consider the Cholesky factorization of the L × L matrixD(n) = H(n)HH(n) = R(n)HR(n) where n < N , R(n) =[r
(n)i,j ]L×L is an upper-triangular matrix and D(n) = [d
(n)i,j ]L×L
is a positive definite matrix. Using the definition of Choleskydecomposition [46], we have
r(n)i,j =
1
r(n)i,i
√√√√√d(n)i,j −
i−1∑k=1
r(n)k,i
∗r(n)k,j i < j. (14)
It is not hard to see that the condition in (6) is equivalent tothe following equation:
d(n)i,i+1 = d
(n)i,i+2 = ... = d
(n)
i,ℓ(n)−1= d
(n)
i,ℓ(n) = 0, (15)
where i = 1, 2, ..., ℓ(n) − 1. By using (14) and (15) for i = 1,one can readily conclude that
r(n)1,2 = r
(n)1,3 = ... = r
(n)
1,ℓ(n)−1= r
(n)
1,ℓ(n) = 0. (16)
We assume that for i ≤ p, 1 ≤ p ≤ ℓ(n) − 2
r(n)i,j = 0 p+ 1 ≤ j ≤ ℓ(n) − 1. (17)
We now show that (17) is also true for i = p+1. To this end,we rewrite (14) for i = p+ 1 as follows:
r(n)p+1,j =
1
r(n)p+1,p+1
√√√√√d(n)p+1,j −
p∑k=1
r(n)k,p+1
∗r(n)k,j p+ 1 < j.
(18)Obviously, two terms d
(n)p+1,j , p + 2 ≤ j ≤ ℓ(n), and r
(n)k,p+1,
1 ≤ k ≤ p, are zero due to the assumptions in (15) and (17),respectively. Therefore, the condition in (5) satisfies and theproof is completed for the positive definite case.
Now, we assume that D(n) is semi-positive definite. Aspreviously discussed in Section IV-A, we apply a semi-positiveto positive definite transformation method [41], [42] to matrixD(n) and use the positive definite matrix G(n) = F(H(n), λ)for the SD algorithm. For the method used in [41], sinceG(n) = D(n) + λIL, it is clear that non-diagonal entries ofmatrix D(n) do not change and the condition in (15) is stillsatisfied by G(n). For the transformation used in [42], matrixH(n) = [H
(n)1 H
(n)2 ], where H
(n)1 and H
(n)2 are Nrτ
(n) ×Nrτ
(n) and Nrτ(n) × L − Nrτ
(n) matrices, respectively, isdirectly transformed to a full-column-rank matrix, denoted byH
(n)t , as follows:
H(n)t =
(H
(n)1 H
(n)2
0L−Nrτ(n)×Nrτ(n) λIL−Nrτ(n)
). (19)
Due to the added zero elements in (19), this transformationcannot also change the condition in (6) or equivalently in (15).Hence, the theorem is still valid for the semi-definite case andthe proof is completed.
B. Proof of Theorem 2
For simplicity, the theorem is proved for the MISO casewhere Nr = 1 and Nt is arbitrary. We then show that theresult can be straightforwardly generalized to the MIMO case.
To have a full fast-decodable MISO HARQ protocol whichis independent of the sub-matrix selection for retransmissionrounds, it is sufficient that i) the sub-matrix H(1) = H(1)
of H satisfies (6) with the CRF ℓ(1), and ii) for any arbitraryvalue of N , the resulted matrix H(n) from adding any arbitrarysub-matrices H(n) of H to H(n−1) satisfies (6) for n =2, 3, ... , N .
Without loss of generality, we assume T (1) = 2. If two firstcolumns of a maximal rate Nt × T OSTBC [43] is selectedfor the first transmission round, the equivalent channel matrixH(1) would have the following general form:
H(1) =
(h1 h2 Hh2
∗ −h1∗
), (20)
where H is a 2 × (L − 2) matrix. It is easy to show thatH(1) satisfies (5) with the CRF ℓ(1) = 2 and, therefore, thefirst transmission round is fast-decodable. Now, we considerthe special case where T (2) = T (3) = ... = T (N) = 1,since other HARQ protocols with different values of T (i),i = 2, 3, ... , N , and N can be constructed from this specialcase. By adding the T (2) × L sub-vector H(2), the resultedτ (2) ×L matrix H(2) satisfies (6) if and only if h(2)
1 h(2)2 = 0.
With a similar argument as for n = 1, one can deduce thefollowing equations:
h(n)1 h
(n)2 = 0, n = 2, 3, ... , N. (21)
By comparing the relationshhip between the equivalent chan-nel matrix H and the codeword matrix X and considering (21),we conclude that the T×1 vector X(n) cannot contain both ofsymbols s1 and s2 for n = 2, 3, ... , N . Hence, the problem isto prove that the two first columns of a maximal rate OSTBCmatrix are only the columns in which both of symbols s1 ands2 appear. To this end, we turn our focus on the structuralalgorithm of the OSTBC with the maximal rate [43]. Thealgorithm is recursive in the sense that the Nt×TNt OSTBC isbuilt from the OSTBC matrix with Nt − 1 transmit antennasand TNt−1 time slots. Let us denote the Nt − 1 × TNt−1
OSTBC matrix with LNT−1 information symbols by XNt−1.To build an Nt×TNt OSTBC, the 1×TNt−1 row vector xnew,which contains the LNT − LNT−1 new information symbolsand TNt−1−LNT
+LNT−1 zeros, adds to XNt−1 and resultsthe Nt × TNt−1 matrix:
XNt =
(XNt−1
xnew
). (22)
To preserve the orthogonality between the new row xnew andother Nt− 1 rows, TNt −TNt−1 column vectors of length Nt

12
are added to matrix XNt and results the following matrix:
XNt =
(XNt−1 x1 x2 ... xTNt−TNt−1xnew
). (23)
Since each of LNt information symbols must appear onlyone time in a row of matrix XNt , one can readily concludethat the last element of LNt−1 column vectors xi’s, i =1, 2, ... , LNt−1, is the information symbols of matrix XNt−1
and that of other TNt − TNt−1 −LNt−1 are zero. In addition,the top Nt−1 elements of vectors xi’s are elements of vectorxnew or zero. Hence, there is not a new column xi that has acombination of information symbols of matrix XNt−1. Since,the information symbols s1 and s2 are in the OSTBC matrixwith two transmit antennas, they do not appear both in thenew columns of the OSTBC matrix with Nt ≥ 3.
In order to generalize the theorem to the MIMO case,three issues should be noted: i) the NrNt × L equivalentchannel matrix HMIMO can be constructed from Nr HMISO
of dimension Nt ×L such that 1 ≤ ith ≤ Nr matrix HMISO
involves Nt path gains associated with the ith receive antennaand Nt transmit antennas, ii) all HMISO’s have the samestructures, and iii) choosing the jth column of matrix X isequivalent to jth row selection of all Nr matrices HMISO.By considering the above points and the proof steps in MISOcase, one can readily generalize the theorem for the MIMOsystems.
C. Proof of Theorem 3
Since the T(1)min of total time slots T are assigned to the first
transmission round, our problem is equivalent to the numberof ways of dividing the T − T
(1)min time slots between two to
T − T(1)min + 1 (re)transmission rounds. Let us denote by ti
the number of assigned time slots in the ith (re)transmissionround. The problem can be formulated as follows:
t1 + t2 = Tt1 + t2 + t3 = T
...t1 + t2 + · · ·+ t
T−T(1)min−1
+ tT−T
(1)min
= T
t1 + t2 + · · ·+ tT−T
(1)min
+ tT−T
(1)min+1
= T,
(24)
where t1 ≥ T(1)min, ti ≥ 1, and 2 ≤ i ≤ T − T
(1)min + 1.
It is not hard to show that the number of solutions for mth
equation in (24) is(
T − T(1)min
m
)where 1 ≤ m ≤ T −
T(1)min, and hence, the total number of solutions is equal to
T−T(1)min∑
m=1
(T − T
(1)min
m
)= 2T−T
(1)min − 1.
REFERENCES
[1] S. M. Alamouti, “A simple transmit diversity technique for wirelesscommunications”, IEEE Journal on Selected Areas in Communications,vol. 16, no. 8, pp. 1451–1458, Oct. 1998.
[2] V. Tarokh, H. Jafarkhani, and R. Calderbank, “Space-time block codesfrom orthogonal designs”, IEEE Trans. on Information Theory, vol. 45,no. 5, pp. 1456–1467, July 1999.
[3] V. Tarokh, H. Jafarkhani, and R. Calderbank, “Space-time block codesfor high data rate wireless communication: Performance results”, IEEEJournal on Selected Areas in Communications, vol. 17, no. 3, pp. 451–460, March 1999.
[4] E. Biglieri, Y. Hong, and E. Viterbo, “On fast-decodable space-timeblock codes”, IEEE Trans. on Information Theory, vol. 55, no. 2, pp.524–530, Feb. 2009.
[5] J. Paredes, A. B. Gershman, and M. G.-Alkhansari, “A new full-rate full-diversity space-time block code with nonvanishing determinantsand simplified maximum-likelihood decoding”, IEEE Trans. on SignalProcessing, vol. 56, no. 6, pp. 2461–2469, June 2008.
[6] S. Sezginer, S. Sari, and E. Biglieri, “On high-rate full-diversity 2×2space-time codes with low-complexity optimum detection”, IEEE Trans.on Communications, vol. 57, no. 5, pp. 1532–1541, May 2009.
[7] M. Samuel and M. Fitz, “Multi-strata codes: Space-time block codeswith low detection complexity”, IEEE Trans. on Communications, vol.58, no. 4, pp. 1080–1089, April 2010.
[8] S. S. Hosseini, S. Talebi, and M. Shahabinejad, “A full-rate full-diversity2 × 2 space-time block code with linear complexity for the maximumlikelihood receiver”, IEEE Communications Letters, vol. 15, no. 8, pp.842–844, Aug. 2011.
[9] S. S. Hosseini, S. Talebi, and J. Abouei, “Comprehensive study on a2× 2 full-rate and linear decoding complexity space-time block code”,IET Communications, vol. 9, no. 1, pp. 122–132, Jan. 2015.
[10] J. Abouei, H. Bagheri, and A. K. Khandani, “An efficient adaptivedistributed space-time coding scheme for cooperative relaying”, IEEETrans. on Wireless Communications, vol. 8, no. 10, pp. 4957–4962, Oct.2009.
[11] E. N. Onggosanusi, A. G. Dabak, Y. Hui, and G. Jeong, “HybridARQ transmission and combining for MIMO systems”, in Proc. IEEEInternational Conference Communications (ICC’03), Dallas, TX, USA,May 2003, pp. 3205–3209.
[12] D. Chase, “Code combining-A maximum-likelihood decoding approachfor combining an arbitrary number of noisy packets”, IEEE Trans. onCommunications, vol. 33, no. 5, pp. 385–393, May 1985.
[13] S. Sesia, G. Caire, and G. Vivier, “Incremental redundancy hybrid ARQschemes based on low-density parity- check codes”, IEEE Trans. onCommunications, vol. 52, no. 8, pp. 1311–1321, Aug. 2004.
[14] A. V. Neguyen and M. A. Ingram, “Hybrid ARQ protocols using space-time codes”, in Proc. IEEE Vehicular Technology Conference (VTC’01),Atlantic City, NJ, USA, Oct. 2001, pp. 2364–2368.
[15] V. Gulati and K. R. Narayanan, “Concatenated codes for fading channelsbased on recursive space-time trellis codes”, IEEE Trans. on WirelessCommunications, vol. 2, no. 1, pp. 118–128, Jan. 2003.
[16] E. de Carvalho and P. Popovski, “Strategies for ARQ in 2×2 MIMOsystems”, IEEE Communications Letters, vol. 12, no. 6, pp. 441–443,June 2008.
[17] S. Ko, H. Seo, and B. G. Lee, “Estimation-based retransmission modeselection for reinforced HARQ operation in MIMO systems”, IEEETrans. on Wireless Communications., vol. 8, no. 9, pp. 4623–4633, Sept.2009.
[18] K. Zheng, H. Long, L. Wang, W. Wang, and Y.-Il Kim, “Design andperformance of space-time precoder with hybrid ARQ transmission”,IEEE Trans. on Vehicular Technology, vol. 58, no. 4, pp. 1816–1822,May 2009.
[19] L. Zheng and D. Tse, “Diversity and multiplexing: A fundamentaltradeoff in multiple-antenna channels”, IEEE Trans. on InformationTheory, vol. 49, no. 5, pp. 1073–1096, May 2003.
[20] H. El Gamal, G. Caire, and M. O. Damen, “The MIMO ARQ channel:Diversity-multiplexing-delay tradeoff”, IEEE Trans. on InformationTheory, vol. 52, no. 8, pp. 3601–3621, Aug. 2006.
[21] T. Kim and M. Skoglund, “Diversity-multiplexing tradeoff in MIMOchannels with partial CSIT”, IEEE Trans. on Information Theory, vol.53, no. 8, pp. 2743–2759, Aug. 2007.
[22] A. Chuang, A. Guillen i Fabregas, L. K. Rasmussen, and I. B. Collings,“Optimal throughput-diversity-delay tradeoff in MIMO ARQ block-fading channels”, IEEE Trans. on Information Theory, vol. 54, no. 9,pp. 3968–3986, Sept. 2008.
[23] C. Shen and P. Fitz, “Hybrid ARQ in multiple-antenna slow fadingchannels: Performance limits and optimal linear dispersion code design”,IEEE Trans. on Information Theory, vol. 57, no. 9, pp. 5863–5883, Sept.2011.
[24] X. Liang, C.-M. Zhao, and Z. Ding, “Piggyback retransmissions overwireless mimo channels: Shared Hybrid-ARQ (SHARQ) for bandwidthefficiency”, IEEE Trans. on Wireless Communications, vol. 12, no. 8,pp. 3770–3782, Aug. 2013.

13
[25] Z. Zhang, J. Xu, and L. Qiu, “Robust ARQ precoder optimization for AFMIMO relay systems with channel estimation errors”, IEEE Trans. onWireless Communications., vol. 12, no. 10, pp. 5236–5247, Oct. 2013.
[26] J. Wu, G. Wang, and Y. R. Zheng, “Energy efficiency and spectralefficiency tradeoff in type-I ARQ systems”, IEEE Journal on SelectedAreas in Communications, vol. 32, no. 2, pp. 356–366, Feb. 2014.
[27] B. Makki and T. Eriksson, “On the performance of MIMO-ARQsystems with channel state information at the receiver”, IEEE Trans. onCommunications, vol. 62, no. 5, pp. 1588–1603, May 2014.
[28] M. Zia and Z. Ding, “Bandwidth efficient variable rate HARQ underorthogonal space-time block codes”, IEEE Trans. on Signal Processing,vol. 62, no. 13, pp. 3360–3370, July 2014.
[29] K. D. Nguyen, L. K. Rasmussen, A. Guillen i Fabregas, and N. Letzepis,“MIMO ARQ with multibit feedback: Outage analysis”, IEEE Trans.on Information Theory, vol. 58, no. 2, pp. 765–779, Jan. 2012.
[30] M. S. Nafea, D. Hamza, K.G. Seddik, M. Nafie, and H. El Gamal,“On the ARQ protocols over the Z-interference channels: Diversity-multiplexing-delay tradeoff”, in Proc. IEEE International Symposiumon Information Theory (ISIT’12), Cambridge, MA, USA, July 2012, pp.3140 – 3144.
[31] M.-K. Oh, Y.-H. Kwon, and D.-J. Park, “Efficient hybrid ARQ withspace-time coding and low-complexity decoding”, in Proc. IEEEInternational Conference on Acoustic, Speech and Signal Processing(ICASSP’04), Montreal, Quebec, Canada, May 2004, pp. 589–592.
[32] H. Samra and Z. Ding, “New MIMO ARQ protocols and joint detectionvia sphere decoding”, IEEE Trans. on Signal Processing, vol. 54, no.2, pp. 473–482, Feb. 2006.
[33] C.-M. Chen, J.-Y. Hsu, P.-H. Kuo, and P.-A. Ting, “MIMO hybrid-ARQ utilizing lower rate retransmission over mobile WiMAX system”,in Proc. IEEE Mobile WiMAX Symposium (MWiMAXS’09), Napa Valley,CA, USA, Dec. 2009, pp. 129–134.
[34] H. Samra, Z. Ding, and P. M. Hahn, “Symbol mapping diversitydesign for packet retransmission through fading channels”, in Proc.IEEE Global Telecommunications Conference (GLOBECOM’03), SanFransisco, CA, USA, Dec. 2003, pp. 1989–1993.
[35] V. Tarokh, A. Naguib, N. Seshadri, and A. R. Calderbank, “Space-timecodes for high data rate wireless communication: Performance criteria inthe presence of channel estimation errors, mobility, and multiple paths”,IEEE Trans. on Communications, vol. 47, no. 2, pp. 199–207, Feb. 1999.
[36] F. Oggier, J.-C. Belfiore, and E. Viterbo, “Cyclic division algebras: Atool for space-time coding”, Foundations and Trends in Communicationsand Information Theory, vol. 4, no. 1, pp. 1–95, 2007.
[37] B. M. Hochwald and S. T. Brink, “Achieving near-capacity on amultiple-antenna channel”, IEEE Trans. on Communications, vol. 51,no. 3, pp. 389–399, March 2003.
[38] B. Hassibi and B. M. Hochwald, “High-rate codes that are linear inspace and time”, IEEE Trans. on Information Theory, vol. 48, no. 7,pp. 1804–1824, July 2002.
[39] L. N. Trefethen and D. Bau III, Numerical linear algebra, vol. 50, Siam,1997.
[40] B. Hassibi and H. Vikalo, “On the sphere-decoding algorithm I.Expected complexity”, IEEE Trans. on Signal Processing, vol. 53, no.8, pp. 2806–2818, Aug. 2005.
[41] T. Cui and C. Tellambura, “An efficient generalized sphere decoder forrank-deficient MIMO systems”, IEEE Communications Letters, vol. 9,no. 5, pp. 423–425, May 2005.
[42] P. Wang and T. Le-Ngoc, “A low-complexity generalized spheredecoding approach for underdetermined linear communication systems:Performance and complexity evaluation”, IEEE Trans. on Communica-tions, vol. 57, no. 11, pp. 3376–3388, Nov. 2009.
[43] W. Su, X.-G Xia, and K. J. R. Liu, “A systematic design of high-ratecomplex orthogonal space-time block codes”, IEEE CommunicationsLetters, vol. 8, no. 6, pp. 380–382, June 2004.
[44] H. Jafarkhani, “A quasi-orthogonal space time block code”, IEEE Trans.on Communications, vol. 49, no. 1, pp. 1–4, Jan. 2001.
[45] H. Lutkepohl, Handbook of Matrices, John Wiley & Sons, New York,first edition, 1996.
[46] J. E. Gentle, Numerical linear algebra for applications in statistics,Springer, New York, first edition, 1998.
Seyyed Saleh Hosseini (S’12) received the B.Sc.and the M.Sc. degrees in communication systemsengineering both from the Shahid Bahonar Univer-sity of Kerman, Kerman, Iran, in 2009 and 2012,respectively. From 2013 to 2014, he was a facultymember (lecturer) in the Department of Electri-cal Engineering, Javid University, Iran. Currently,S. Hosseini is an lecturer in the Department ofElectrical and Computer Engineering, at the AzadUniversity, Bardsir Branch, Kerman, Iran. He alsohas served as a reviewer for a number of IEEE
conferences and international journals including IEEE Transactions on Com-munications and IET communications. His research interests are in generalareas of communication theory and wireless communications with particularreference to space-time coding, MIMO HARQ, and error probability analysis.
Jamshid Abouei (S’05-M’11-SM’13) received theB.Sc. degree in electronics engineering and theM.Sc. degree in communication systems engineering(with the highest honor) both from the Isfahan Uni-versity of Technology (IUT), Iran, in 1993 and 1996,respectively, and the Ph.D. degree in electrical engi-neering from the University of Waterloo in Waterloo,ON, Canada, in 2009. From 2009 to 2010, he wasa Postdoctoral Fellow in the Multimedia Lab, in theDepartment of Electrical & Computer Engineering,at the University of Toronto, ON, Canada. Currently,
Dr Abouei is an Assistant Professor in the Department of Electrical &Computer Engineering, at the Yazd University, Iran. His research interestsare in general areas of wireless ad hoc and sensor networks, with particularreference to energy efficiency and optimal resource allocation, multi-userinformation theory, cooperative communication in wireless relay networks,applications of game theory, and orthogonal codes in CDMA systems. DrAbouei has received numerous awards and scholarships, including FOEand IGSA awards for excellence in research in University of Waterloo,Canada, MSRT Ph.D. Scholarship from the Ministry of Science, Researchand Technology, Iran in 2004, and distinguished researcher award in Provinceof Yazd, Iran, December 2011.
Murat Uysal (SM’07) received the B.Sc. and theM.Sc. degree in electronics and communication en-gineering from Istanbul Technical University, Istan-bul, Turkey, in 1995 and 1998, respectively, and thePh.D. degree in electrical engineering from TexasA&M University, College Station, Texas, in 2001.
Dr. Uysal is currently a Professor and Chair ofthe Department of Electrical and Electronics En-gineering at Ozyegin University, Istanbul, Turkey.Prior to joining Ozyegin University, he was a tenuredAssociate Professor at the University of Waterloo,
Canada, where he still holds an adjunct faculty position. Dr. Uysal’s researchinterests are in the broad areas of communication theory and signal processingwith a particular emphasis on the physical layer aspects of wireless communi-cation systems in radio, acoustic and optical frequency bands. He has authoredsome 200 journal and conference papers on these topics and received morethan 3500 citations.
Dr. Uysal is a Senior IEEE member and an active contributor to his profes-sional society. He currently leads the EU COST Action OPTICWISE whichis a consolidated European scientific platform for interdisciplinary researchactivities in the emerging area of optical wireless communications. Dr. Uysalserves on the editorial boards of IEEE Transactions on Communications, IEEETransactions on Vehicular Technology, Wiley Wireless Communications andMobile Computing (WCMC) Journal, and Wiley Transactions on EmergingTelecommunications Technologies (ETT). In the past, he served as an Editorfor IEEE Transactions on Wireless Communications (2003-2011), IEEE Com-munications Letters (2004-2012), Guest Co-Editor for WCMC Special Issueon MIMO Communications (October 2004) and IEEE Journal on SelectedAreas in Communications Special Issue on Optical Wireless Communications(December 2009). Over the years, he has served on the technical programcommittee of more than 80 international conferences and workshops in thecommunications area.
Dr. Uysal is the recipient of several awards including the Universityof Waterloo Engineering Research Excellence Award, Natural Science andEngineering Research Council of Canada (NSERC) Discovery AcceleratorSupplement (DAS) Award, Turkish Academy of Sciences DistinguishedYoung Scientist Award, and Ozyegin University Best Researcher Awardamong others.