
Expert cooperative robots for highly skilled … · Expert cooperative robots for highly skilled...
21
Industrial Technologies 2016 Expert cooperative robots for highly skilled operations for the factory of the future 22-24 June 2016, Amsterdam Expert cooperative robots for highly skilled operations for the factory of the future Presenter: Dr. Sotiris MAKRIS Laboratory for Manufacturing Systems & Automation (LMS) Dept. of Mechanical Engineering & Aeronautics University of Patras, Greece www.lms.mech.upatras.gr
-
Upload
trinhtuong -
Category
Documents
-
view
230 -
download
0
Transcript of Expert cooperative robots for highly skilled … · Expert cooperative robots for highly skilled...
Industrial Technologies 2016Expert cooperative robots
for highly skilled operations
for the factory of the future22-24 June 2016, Amsterdam
Expert cooperative robots for highly
skilled operations for the factory of
the future
Presenter: Dr. Sotiris MAKRIS
Laboratory for Manufacturing Systems & Automation (LMS)
Dept. of Mechanical Engineering & Aeronautics
University of Patras, Greece
www.lms.mech.upatras.gr
Laboratory for Manufacturing Systems and AutomationDepartment of Mechanical Engineering and Aeronautics, University of Patras, Greece
Industrial Technologies 2016Expert cooperative robots for highly skilled operations
for the factory of the future22-24 June 2016, Amsterdam
Laboratory for Manufacturing Systems and AutomationDepartment of Mechanical Engineering and Aeronautics, University of Patras, Greece
Industrial Technologies 2016Expert cooperative robots for highly skilled operations
for the factory of the future22-24 June 2016, Amsterdam
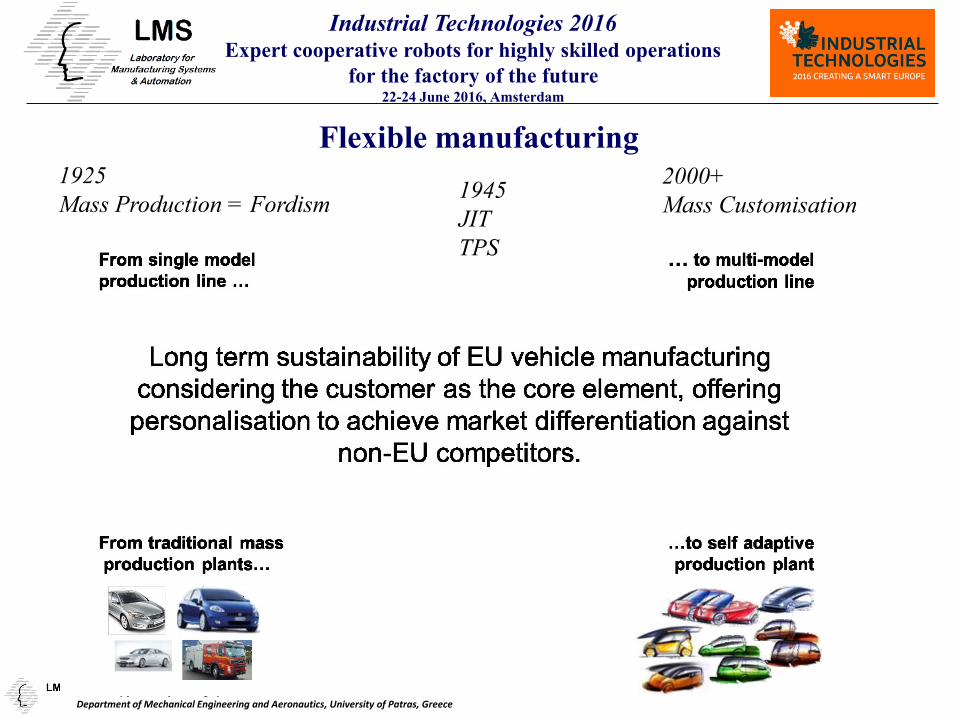
Flexible manufacturing1925
Mass Production = Fordism
2000+
Mass Customisation1945
JIT
TPS
Laboratory for Manufacturing Systems and AutomationDepartment of Mechanical Engineering and Aeronautics, University of Patras, Greece
Industrial Technologies 2016Expert cooperative robots for highly skilled operations
for the factory of the future22-24 June 2016, Amsterdam
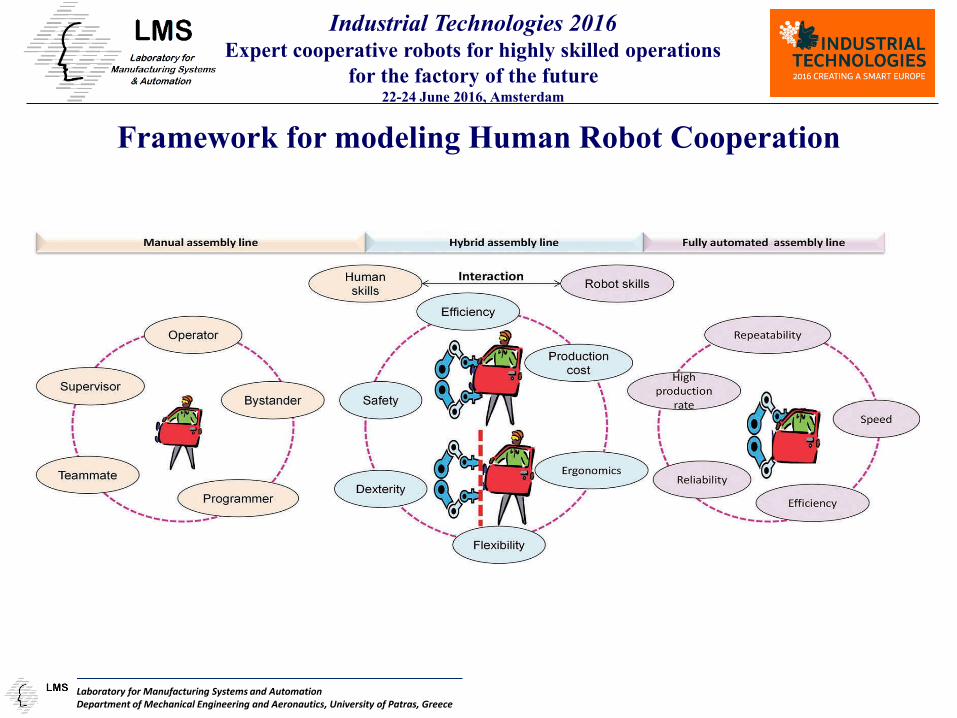
Framework for modeling Human Robot Cooperation
Laboratory for Manufacturing Systems and AutomationDepartment of Mechanical Engineering and Aeronautics, University of Patras, Greece
Industrial Technologies 2016Expert cooperative robots for highly skilled operations
for the factory of the future22-24 June 2016, Amsterdam
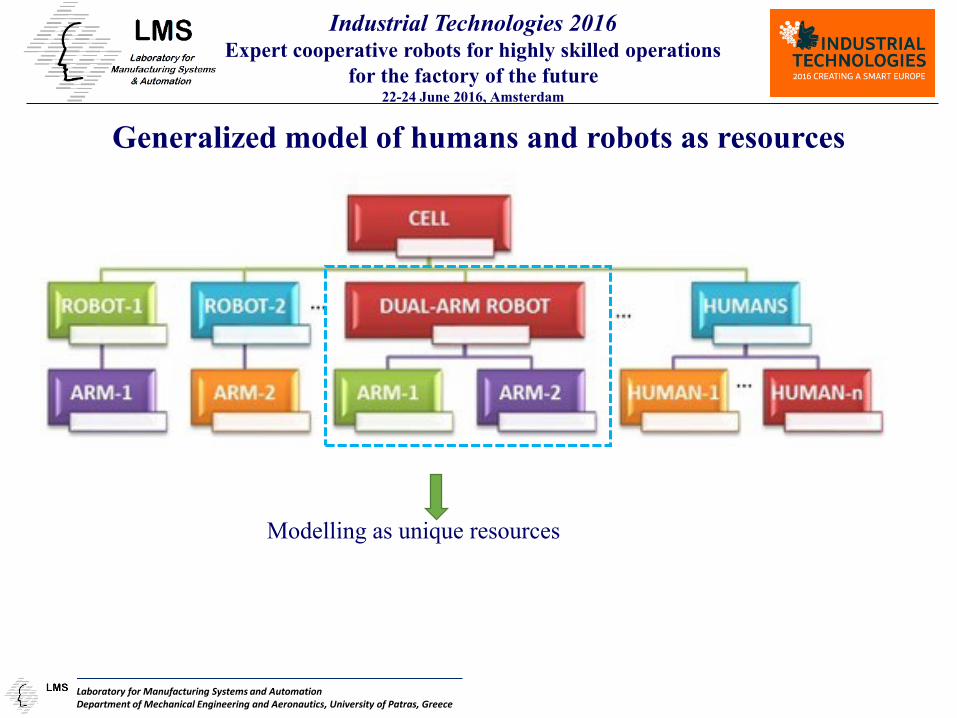
Generalized model of humans and robots as resources
Modelling as unique resources
Laboratory for Manufacturing Systems and AutomationDepartment of Mechanical Engineering and Aeronautics, University of Patras, Greece
Industrial Technologies 2016Expert cooperative robots for highly skilled operations
for the factory of the future22-24 June 2016, Amsterdam
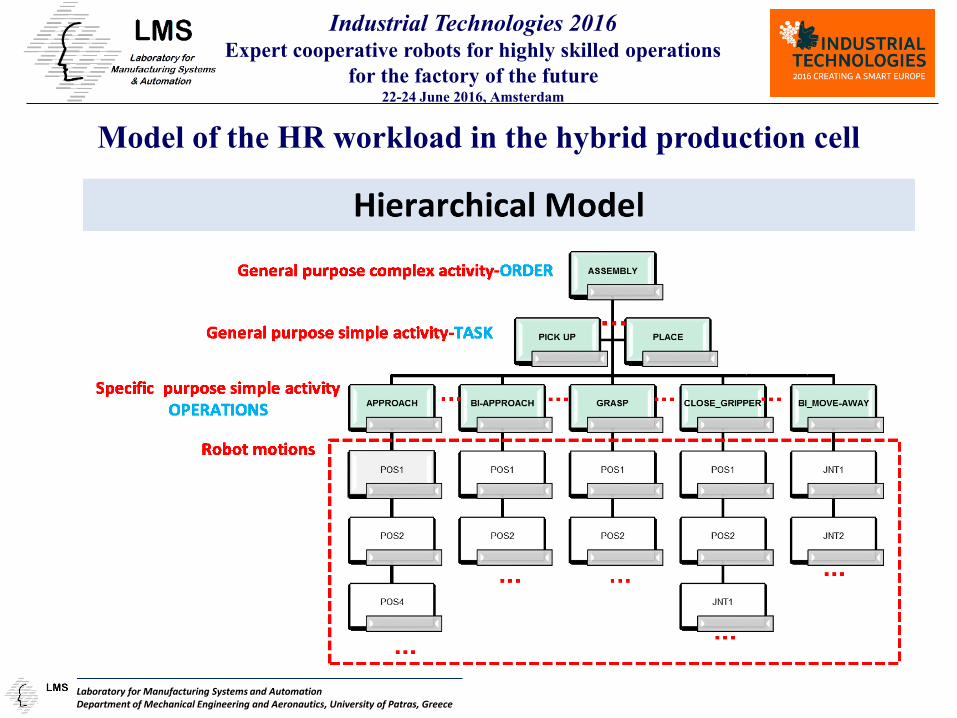
Model of the HR workload in the hybrid production cell
Laboratory for Manufacturing Systems and AutomationDepartment of Mechanical Engineering and Aeronautics, University of Patras, Greece
Industrial Technologies 2016Expert cooperative robots for highly skilled operations
for the factory of the future22-24 June 2016, Amsterdam
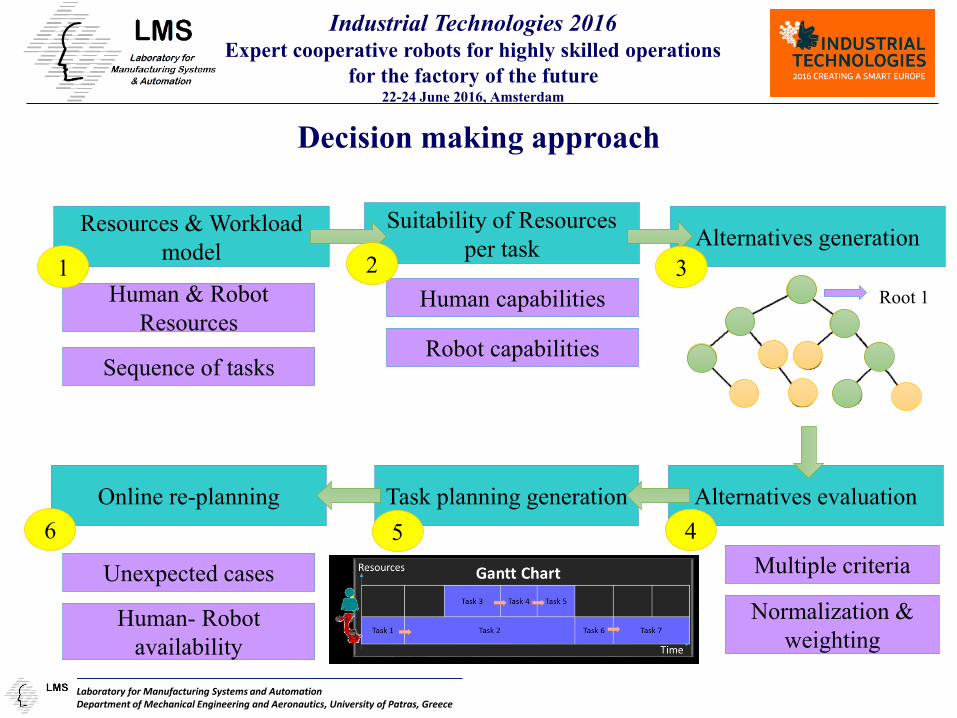
Suitability of Resources
per task
Task planning generation
Decision making approach
Resources & Workload
model
Human capabilities
Robot capabilities
Alternatives generation
Human & Robot
Resources
Sequence of tasks
Root 1
Alternatives evaluation
Multiple criteria
Normalization &
weighting
Online re-planning
1 2 3
456
Resources
Unexpected cases
Human- Robot
availability
Laboratory for Manufacturing Systems and AutomationDepartment of Mechanical Engineering and Aeronautics, University of Patras, Greece
Industrial Technologies 2016Expert cooperative robots for highly skilled operations
for the factory of the future22-24 June 2016, Amsterdam
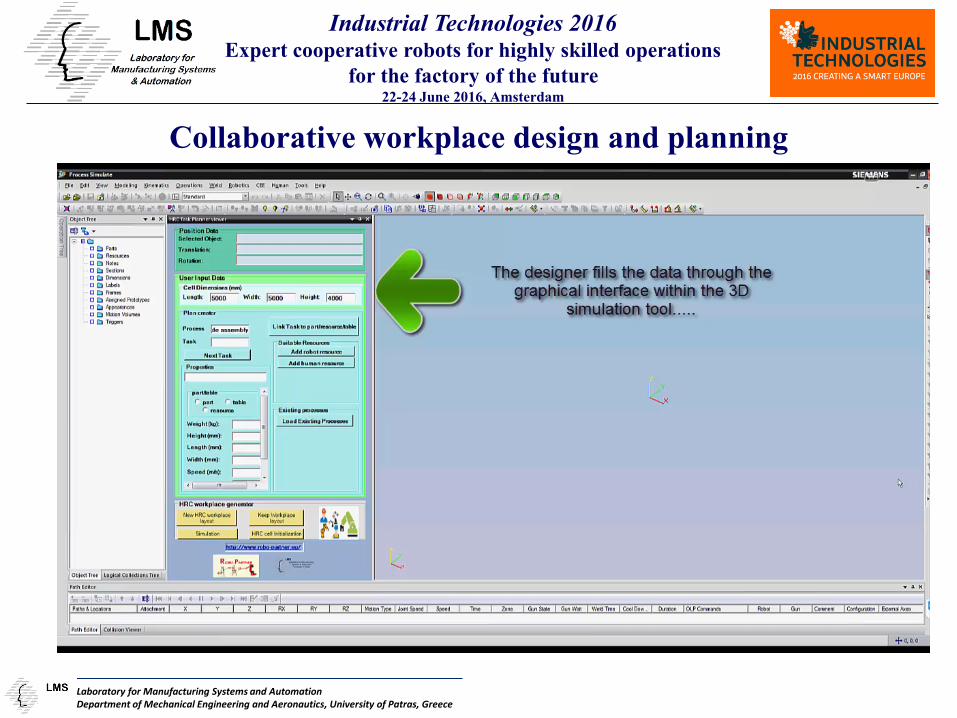
Collaborative workplace design and planning
Laboratory for Manufacturing Systems and AutomationDepartment of Mechanical Engineering and Aeronautics, University of Patras, Greece
Industrial Technologies 2016Expert cooperative robots for highly skilled operations
for the factory of the future22-24 June 2016, Amsterdam
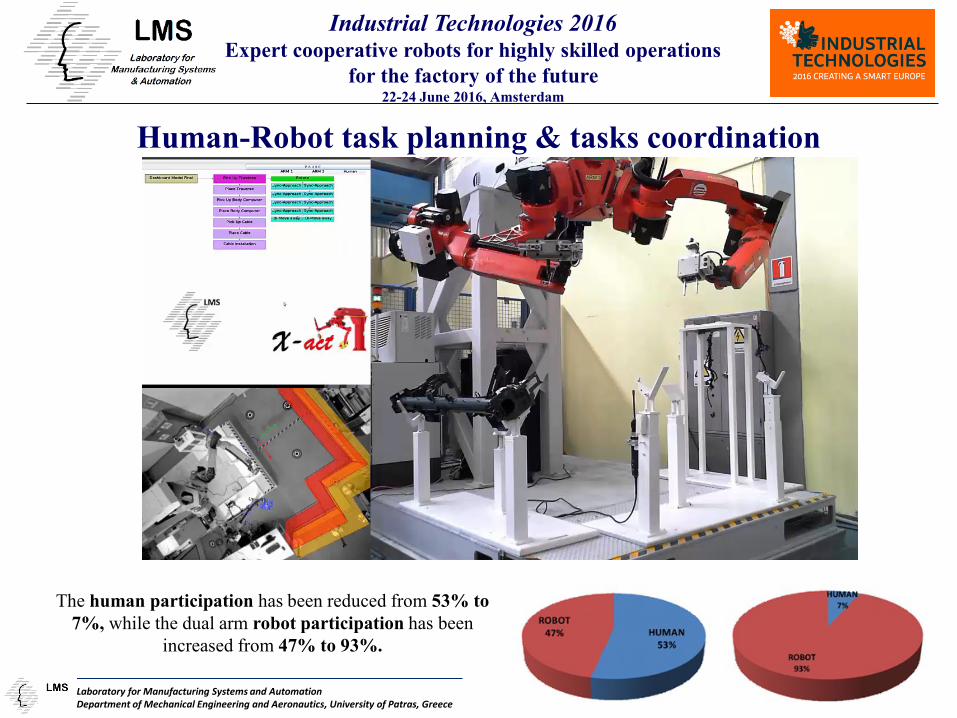
Human-Robot task planning & tasks coordination
The human participation has been reduced from 53% to
7%, while the dual arm robot participation has been
increased from 47% to 93%.
Laboratory for Manufacturing Systems and AutomationDepartment of Mechanical Engineering and Aeronautics, University of Patras, Greece
Industrial Technologies 2016Expert cooperative robots for highly skilled operations
for the factory of the future22-24 June 2016, Amsterdam
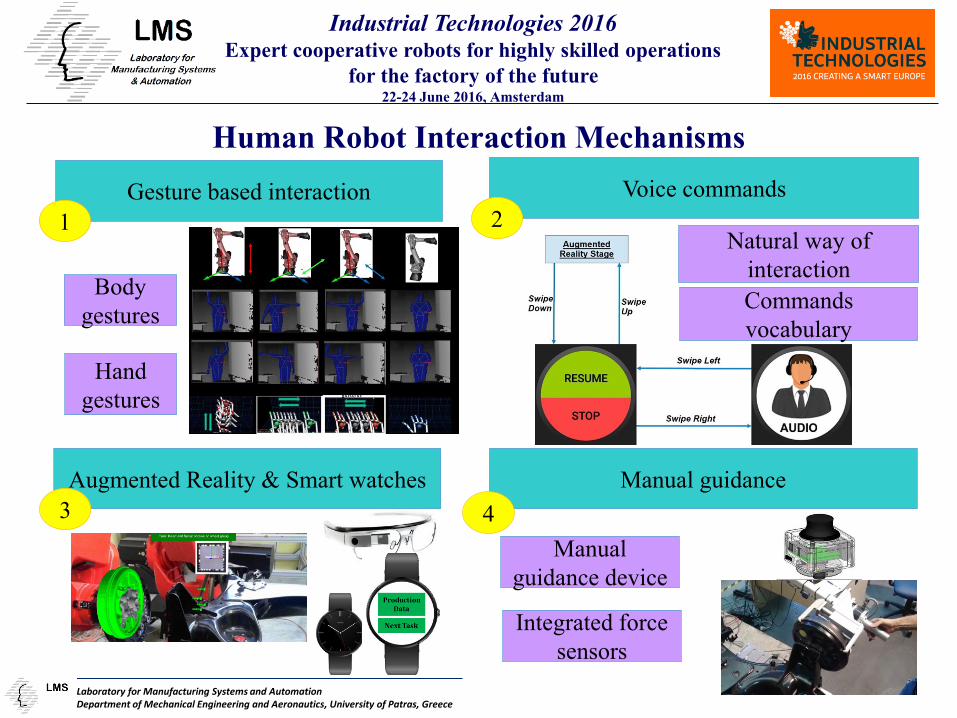
Human Robot Interaction Mechanisms
Voice commandsGesture based interaction
Augmented Reality & Smart watches
Body
gestures
Hand
gestures
Manual guidance
1 2
3 4
Resources
Manual
guidance device
Natural way of
interaction
Commands
vocabulary
Integrated force
sensors
Laboratory for Manufacturing Systems and AutomationDepartment of Mechanical Engineering and Aeronautics, University of Patras, Greece
Industrial Technologies 2016Expert cooperative robots for highly skilled operations
for the factory of the future22-24 June 2016, Amsterdam
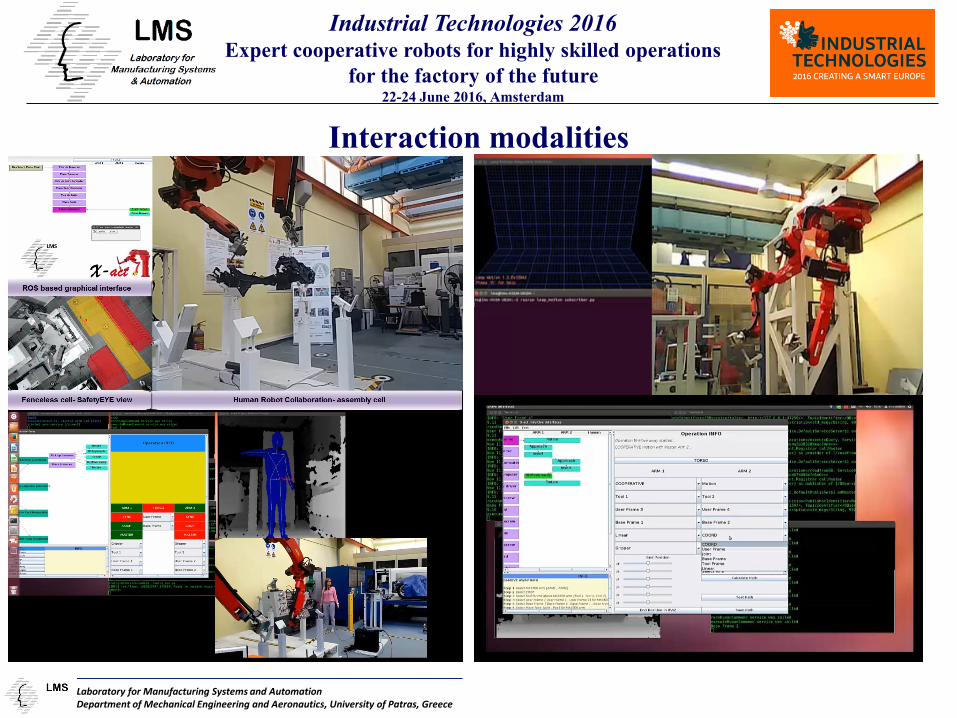
Gesture based interaction
1
Interaction modalities
Voice commands
2

Laboratory for Manufacturing Systems and AutomationDepartment of Mechanical Engineering and Aeronautics, University of Patras, Greece
Industrial Technologies 2016Expert cooperative robots for highly skilled operations
for the factory of the future22-24 June 2016, Amsterdam
Enhanced cooperation for assembly
Laboratory for Manufacturing Systems and AutomationDepartment of Mechanical Engineering and Aeronautics, University of Patras, Greece
Industrial Technologies 2016Expert cooperative robots for highly skilled operations
for the factory of the future22-24 June 2016, Amsterdam
Enhanced cooperation for assembly

Laboratory for Manufacturing Systems and AutomationDepartment of Mechanical Engineering and Aeronautics, University of Patras, Greece
Industrial Technologies 2016Expert cooperative robots for highly skilled operations
for the factory of the future22-24 June 2016, Amsterdam
Challenges in technology upscaling
Technology perspective
In this perspective, additional use cases will help to demonstrate the maturity of the
technology to enable flexible production
IoT, CPS technology to be further validated/demonstrated
Education
Teaching/Learning factory approach
Laboratory for Manufacturing Systems and AutomationDepartment of Mechanical Engineering and Aeronautics, University of Patras, Greece
Industrial Technologies 2016Expert cooperative robots for highly skilled operations
for the factory of the future22-24 June 2016, Amsterdam
LMS related references (1)
Chryssolouris G. Manufacturing Systems: Theory and Practice. 2nd ed. New York:
Springer-Verlag; 2006.
P. Tsarouchi, S. Makris, G. Michalos, M. Stefos, K. Fourtakas, K. Kaltsoukalas, D.
Kontrovrakis, and G. Chryssolouris, “Robotized Assembly Process Using Dual Arm
Robot,” Procedia CIRP, vol. 23, pp. 47–52, 2014.
Tsarouchi, Panagiota, Sotiris Makris, George Michalos, Alexandros-Stereos Matthaiakis,
Xenofon Chatzigeorgiou, Athanasios Athanasatos, Michael Stefos, Panagiotis Aivaliotis,
and George Chryssolouris. 2015. “ROS Based Coordination of Human Robot
Cooperative Assembly Tasks-An Industrial Case Study.” Procedia CIRP 37: 254–59.
doi:10.1016/j.procir.2015.08.045.
Michalos, George, Sotiris Makris, Panagiota Tsarouchi, Toni Guasch, Dimitris
Kontovrakis, and George Chryssolouris. 2015. “Design Considerations for Safe
Human-Robot Collaborative Workplaces.” Procedia CIRP 37. Elsevier B.V.: 248–53.
doi:10.1016/j.procir.2015.08.014.
P. Tsarouchi, S.Makris, G. Chryssolouris, On a human and dual-arm robot task
planning method, To be presented in 49th CIRP Conference on Manufacturing Systems
(CIRP-CMS 2016).
Laboratory for Manufacturing Systems and AutomationDepartment of Mechanical Engineering and Aeronautics, University of Patras, Greece
Industrial Technologies 2016Expert cooperative robots for highly skilled operations
for the factory of the future22-24 June 2016, Amsterdam
LMS related references (2)
S. Makris, P. Tsarouchi, D. Surdilovic, and J. Krüger, “Intuitive dual arm robot
programming for assembly operations,” CIRP Ann. - Manuf. Technol., vol. 63, no. 1,
pp. 13–16, 2014.
K. Kaltsoukalas, S. Makris, and G. Chryssolouris, “On generating the motion of
industrial robot manipulators,” Robot. Comput. Integr. Manuf., vol. 32, pp. 65–71, Apr.
2015.
Papacharalampopoulos, S. Makris, A. Bitzios, and G. Chryssolouris, “Prediction of
cabling shape during robotic manipulation,” Int. J. Adv. Manuf. Technol., vol. 32, pp.
1–8, Jun. 2015.
Tsarouchi, Panagiota, Sotiris Makris, and George Chryssolouris. 2016. “Human – Robot
Interaction Review and Challenges on Task Planning and Programming.”
International Journal of Computer Integrated Manufacturing, February, 1–16.
doi:10.1080/0951192X.2015.1130251.
George Michalos, Panagiotis Karagiannis, Sotiris Makris, Önder Tokçalar, George
Chryssolouris, "Augmented Reality (AR) Applications for Supporting Human-Robot
Interactive Cooperation", (CMS 2015) 48th CIRP Conference on Manufacturing
Systems, 24-26 June, Ischia, Italy (2015)
Laboratory for Manufacturing Systems and AutomationDepartment of Mechanical Engineering and Aeronautics, University of Patras, Greece
Industrial Technologies 2016Expert cooperative robots for highly skilled operations
for the factory of the future22-24 June 2016, Amsterdam
LMS related references (3) Tsarouchi, Panagiota, Jason Spiliotopoulos, George Michalos, Spyros Koukas, Athanasios
Athanasatos, Sotiris Makris, and George Chryssolouris. 2016. “A Decision Making
Framework for Human Robot Collaborative Workplace Generation.” Procedia CIRP
44: 228–32. doi:10.1016/j.procir.2016.02.103.
G. Michalos, S. Makris, J. Spiliotopoulos, I. Misios, P. Tsarouchi, G. Chryssolouris,
"ROBO-PARTNER: Seamless Human-Robot Cooperation for Intelligent, Flexible
and Safe Operations in the Assembly Factories of the Future", (CATS 2014) 5th CIPR
Conference on Assembly Technologies and Systems, 13-14 November, Dresden,
Germany, pp. 71-76 (2014)
P.Tsarouchi, S.Matthaiakis, S. Makris and G. Chryssolouris, "On a Human Robot
Collaboration in an assembly cell", International Journal of Computer Integrated
Manufacturing (Under Publication), 2016.
George Michalos, Niki Kousi, Sotiris Makris, George Chryssolouris, "Performance
assessment of production systems with mobile robots", (CMS 2015) 48th CIRP
Conference on Manufacturing Systems, 24-26 June, Ischia, Italy (2015)
S. Makris, P. Karagiannis, S. Koukas, S. Matthaiakis, “Augmented Reality system for
operator support in human-robot collaborative assembly”, CIRP Annals –
Manufacturing Technology, Vol. 66, Issue 1, (2016) ..-…, DOI 10.1016/j.cirp.2016.04.038

Laboratory for Manufacturing Systems and AutomationDepartment of Mechanical Engineering and Aeronautics, University of Patras, Greece
Industrial Technologies 2016Expert cooperative robots for highly skilled operations
for the factory of the future22-24 June 2016, Amsterdam
Acknowledgments
www.robo-partner.eu
www.xact-project.eu/
Industrial Technologies 2016Expert cooperative robots
for highly skilled operations
for the factory of the future22-24 June 2016, Amsterdam
THANK YOU!
Presenter: Dr. Sotiris MAKRIS
http://lms.mech.upatras.gr
Laboratory for Manufacturing Systems & Automation (LMS)
Laboratory for Manufacturing Systems and AutomationDepartment of Mechanical Engineering and Aeronautics, University of Patras, Greece
Industrial Technologies 2016Expert cooperative robots for highly skilled operations
for the factory of the future22-24 June 2016, Amsterdam

Laboratory for Manufacturing Systems and AutomationDepartment of Mechanical Engineering and Aeronautics, University of Patras, Greece
Industrial Technologies 2016Expert cooperative robots for highly skilled operations
for the factory of the future22-24 June 2016, Amsterdam

















