Exp 1 Final F2013
19
1 Experiment I Signals, Spectrum, and Systems Kamran Kiasaleh CONTENTS I Introduction 2 II Required material 2 III Pre-Lab 2 IV Procedure 3 V Theory and Practice 4 V-A Signals and Spectrum ............................. 4 V-A1 Theory ............................... 4 V-A2 Practical Considerations ...................... 5 V-B Bandwidth ................................... 6 V-B1 3-dB bandwidth .......................... 6 V-B2 90% bandwidth .......................... 7 V-C Systems .................................... 7 V-C1 Maximally Flat (MF) ....................... 7 V-C2 Equal Ripple (ER) ......................... 8 V-C3 Linear Phase (LP) ......................... 9 V-C4 Filter Realization ......................... 9 VI References 18 January 31, 2013 DRAFT
description
exp
Transcript of Exp 1 Final F2013

1
Experiment I
Signals, Spectrum, and Systems
Kamran Kiasaleh
CONTENTS
I Introduction 2
II Required material 2
III Pre-Lab 2
IV Procedure 3
V Theory and Practice 4
V-A Signals and Spectrum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
V-A1 Theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
V-A2 Practical Considerations . . . . . . . . . . . . . . . . . . . . . . 5
V-B Bandwidth . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
V-B1 3-dB bandwidth . . . . . . . . . . . . . . . . . . . . . . . . . . 6
V-B2 90% bandwidth . . . . . . . . . . . . . . . . . . . . . . . . . . 7
V-C Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
V-C1 Maximally Flat (MF) . . . . . . . . . . . . . . . . . . . . . . . 7
V-C2 Equal Ripple (ER) . . . . . . . . . . . . . . . . . . . . . . . . . 8
V-C3 Linear Phase (LP) . . . . . . . . . . . . . . . . . . . . . . . . . 9
V-C4 Filter Realization . . . . . . . . . . . . . . . . . . . . . . . . . 9
VI References 18
January 31, 2013 DRAFT

2
I. INTRODUCTION
This experiment is designed to enhance the understanding of signals and systems through
a number of experimental procedures. The material presented here are complementary to the
material presented in EE3302 and reviewed in EE3350, and hence students are encouraged to
review the lectures on Signals and Systems material before attempting to conduct this experiment.
A theory and practice section is added to help students familiarize themselves with the material.
Familiarity with matlab will be helpful, but not necessary. However, a knowledge of programming
is of importance to the understanding of some key concepts. LabView will be used in this
experiment. It is necessary for students to familiarize themselves with the LabView setup in the
lab.
II. REQUIRED MATERIAL
In this experiment, the concept of systems will be studied through the design and testing of
filters.
1) Resistors, capacitors and inductors (the values for these components are design values,
which are obtained in the pre-lab section)
2) LabView, Function Generator, Oscilloscope, and breadboard.
III. PRE-LAB
• Obtain the spectrum of a sinusoid with an amplitude of 1 volt peak-to-peak (Vpp), frequency
of 10 kHz, and a phase of 0.1 rad. First, find the exact spectrum using the Fourier Transform,
and then compute the spectrum using DFT. Assume that the signal is sampled at 4 times
the Nyquist rate. You can use matlab or any other programming language to compute DFT.
Plot both spectra. Use dBv to represent spectra.
• Repeat the previous step when the sinusoid is replaced with a square wave with peak-to-
peak amplitude of 2 volts, zero dc level, and a period of T0 = 1 msec. In order to determine
the Nyquist frequency, assume that the spectrum of a square wave is negligible for f > 3f0
where f0 =1T0
is the fundamental frequency of the square wave.
• Design a maximally-flat, low-pass filter with the cut-off frequency of 10 kHz and an
attenuation of 20 dB at 20 kHz. Use amplitude scaling so that the filter is terminated onto
DRAFT January 31, 2013

3
a 50 Ω resistance. Use PSpice (free student version is available online) to simulate/validate
the response of your circuit.
• Comment on how the spectrum of the the two signals which you have studied above will be
impacted by this filter (draw a picture of the spectra of the filtered signals) if these signals
are filtered by your circuit. Comment on phase as well as amplitude responses.
IV. PROCEDURE
1) Turn on your computer, the function generator (FG), and the oscilloscope (OSC). Connect
the FG to OSC ch1. Start LabView TIMEFREQ vi function (this function resides in the
LabView folder) and select your OSC from the pull-down menu. Make sure that in the
LabView window you can see the ID numbers of the OSC.
2) Set the frequency span to 30 kHz in the LabView window. Turn on your FG. Press sin
button and set frequency at 10 kHz and amplitude at 1 Vpp. Make sure that output enable
button is pressed for the FG. Set the dc off-set to 0.
3) Observe the spectrum of the signal. Once satisfied with your observation, ask your TA to
validate your result. Since your lab grade is determined using your observed results, it is
important that you have your TA record your observations. Present your theoretical results
that you have obtained for this signal in the pre-lab along with your observed results to the
TA. Comment on similarities and differences between the two observations. Be prepared
to answer questions regarding your observation.
4) Change FG settings to generate a square wave with a period of 1 msec, Vpp value of 2
volts, and zero off-set (dc=0). Set an appropriate frequency span in the LabView window
to observe up to (and including) the 5th harmonic of the square wave. Repeat step 3.
5) Build the low-pass filter described in the Pre-Lab section. Measure the frequency response
of your filter by applying a sinusoid in the range [0, 10fc]. Use TIMEFREQ function to
measure the amplitude of the response of the filter and compare that to the amplitude of
the input by finding the ratio of the output amplitude to that if the input. Choose enough
steps so that you get a clear picture of the response of the filter. Repeat step 3.
6) Apply the signals in steps 2 and 4 to the filter and observe the outputs. Since the filter
is designed to expect 50 Ω resistance at its input and output, loading should not occur.
Repeat 3.
January 31, 2013 DRAFT

4
V. THEORY AND PRACTICE
A. Signals and Spectrum
1) Theory: Without the loss of generality, we concentrate on power signals, where power of
the signal is finite. That is, for a signal x (t) the power, given by
P = limT→∞
1
T
∫ T2
−T2
|x (t)|2 dt, (1)
is finite. Note that such signals possess infinite energy. Power signals, in general, do not have
to be periodic, although periodic signals (almost always) have finite power levels. For instance,
random signals do not exhibit any periodic behavior and yet have, for the most part, finite power.
One can also define the energy signals as signals where
E = limT→∞
∫ T2
−T2
|x (t)|2 dt (2)
(the energy of the signal) is finite. By definition of power, then the energy signals have zero
power. For most communication systems, we focus on transmitted power, and hence power
signals are of particular importance. For this reason, in this experiment, we exclusively deal
with power signals. In theory, you have learned that spectrum of a signal x (t) (or its Fourier
Transform) is given by
X (f) = FT x (t)
=
∫ ∞
−∞
x (t) e−j2πftdt (3)
where f denotes frequency in Hz. In practice, there is a fundamental issue with this representa-
tion; that is, we require ALL values of the signal (from −∞ to ∞). For most cases, this luxury
is not afforded to us, and furthermore, the computation of the integral given an x (t) in practice
will require infinite delay. Hence, one has to devise a practical means of estimating the spectrum
of an observed signal using finite values of the signal.
a) dBv: In order to have a common means of representing signals and the fact that most
signals in this lab are voltages, we use decibel (dB) scale. In particular, we use dB voltage (dBv)
that is given by
20 log10 V rms
DRAFT January 31, 2013

5
where Vrms (root-mean-square) is given by
Vrms =
√√√√ limT→∞
1
T
∫ T2
−T2
|V (t)|2 dt
Note that we have used 20 and not 10 log of the enclosed as dB scale is used to deal with power
(square of voltage) and not voltage. This metric may also be used when the measured value is
the spectrum of the signal.
2) Practical Considerations: In a practical scenario, we only have access to the values of the
signal over an interval of time of length T sec. Furthermore, in modern systems, we sample the
analog signal to form its digital counterpart. Let the sampling rate be fs =1Ts
Hz. From the
Nyquist rate, we understand that
fs ≥ 2fmax (4)
where fmax is the significant bandwidth of the signal. At this time, we do not have a clear idea
as how to find fmax from the description of the signal. We will tackle this problem shortly.
Given the above formulation, we have access to following samples of the signal:
x [−N ] , x [−N + 1] ..., x [0] , ..., x [N − 1] , x [N ]
where N = ⌊ T2Ts⌋.
The question is whether we can get an approximate estimate of the spectrum of x (t) using
the sampled values. Note that we have an understanding on how to select Ts, but the selection
of T (or N ) is somehow left to us. A cursory observation suggests that one has to select a large
N in order to obtain a desirable accuracy. We will verify this observation next. Now, taking the
discrete FT (DFT) of the samples (this is done in matlab using the FFT function),
X [m] =N∑
n=−N
x [n] e−j2πnm2N+1 ;m = −N,−1, ..., N (5)
The question that remains is to determine the relationship between X [m] and X (f). We can
show that
FT
x (t)N∑
n=−N
δ (t− nTs)
|f=mT=
N∑
n=−N
x [n]FT δ (t− nTs)
=N∑
n=−N
x [n] e−j2πfnTs |f=mT=
N∑
n=−N
x [n] e−j2πnm2N+1 = X [m] (6)
January 31, 2013 DRAFT

6
Hence, X [m] seems to be the value of the FT of the delta-sampled analog signal at f = mT
.This
was a long, but very instructive step. Note that since we have access to X [m] ; m = −N,−N +
1, .., N , we have access to the spectrum at step frequencies of 1T
Hz. Hence, the total length
of the observation sets the minimum frequency spacing (resolution). For an application where a
given frequency resolution is desired, one can determine the value of T by setting the desired
resolution to 1T
. This answers the second question (that is, how do I choose T ?). Finally, using
convolution in frequency, and assuming that N is fairly large,
X [m] ≈ FT
x (t)
∞∑
n=−∞
δ (t− nTs)
|f=mT=1
TsX (f) c©
∞∑
n=−∞
δ
(f −
n
Ts
)|f=m
T
=1
Ts
∞∑
n=−∞
X
(f −
n
Ts
)|f=m
T(7)
where c© denotes convolution. Realizing that X (f) = 0 for |f | > 12Ts= fmax
X [m] =1
TsX(m
T
)=1
TsX
(m
fmaxN
); m = −N, ..., N (8)
Hence, X [m] is a scaled version (scaled by 1Ts
) of the spectrum of x (t) at mfmaxN
. In other
words, if one slices the spectrum of x (t), which is defined over [−fmax, fmax] , into 2N + 1
samples, then X [m] denotes the mth sample of the spectrum. Once again, the frequency spacing
is fmaxN
.
B. Bandwidth
In the above analysis, we require a knowledge of fmax (or bandwidth) by observing the
spectrum of the signal. Given the FT of a signal, there are a number of ways to define fmax.
Note that fmax is the one-sided bandwidth of a baseband (low pass) signal. For the case of
bandpass signals, the same argument can be used to define bandwidth when the bandpass signal
is converted into its baseband version.
1) 3-dB bandwidth: In this definition, fmax = f3dB is a frequency that satisfies
−10 log10
∣∣∣∣X (f3dB)
X (fref)
∣∣∣∣2
= 3 (9)
This definition makes the assumption that the spectrum is centered at fref (a reference point in
the spectrum). Typically, fref = 0. That is, X (f) is assumed to be the spectrum of a baseband
DRAFT January 31, 2013

7
signal. This definition is not used in communication systems frequently. Instead, other metrics
may be defined. For instance, one can define bandwidth as a frequency that satisfies the following:
−10 log10
∣∣∣∣X (fmax)
X (fref )
∣∣∣∣2
= α (10)
where α > 3 (in dB) is defined by user.
2) 90% bandwidth: It is common to define the 90% bandwidth f90% as follows:
∫ f90%fref
|X (f)|2 df∫∞fref
|X (f)|2 df= 0.9 (11)
Once again, for the baseband signal fref = 0, while for bandpass signals, which are double-
sideband, the bandwidth is defined as 2fmax (2f3dB or 2f90%). The bandwidth remains as fmax
for the single-sideband case. We caution the reader that 2fmax is not the maximum bandwidth
of a bandpass signal from the sampling point of view. In fact, if the bandpass signal is defined
as a modulated signal about fc (carrier frequency), then the maximum frequency of the signal
for the purpose of sampling is fc + fmax (fmax is the maximum frequency of the baseband
version). In practice1, however, a bandpass signal is not directly sampled. Instead, the signal is
first down-converted to its baseband equivalent (direct conversion receivers) before sampling. In
that event, the above definitions can be used to define bandwidth.
C. Systems
Filters will be used in this experiment to study linear systems. In this experiment, we focus on
the design of filters using passive components only. Such filters can be realized for frequencies
ranging from baseband to RF/Microwave bands. In general, there are two forms of filter response;
maximally flat and equal ripple.
1) Maximally Flat (MF): An nth order low-pass filter is considered to have a maximally flat
response if its system function satisfies the following relationship:
∣∣∣∣H (f)
H (0)
∣∣∣∣2
=1
1 + k2(f
fc
)2n (12a)
1Although it is a common practice to down covert a bandpass signal to its baseband version, some modern receivers use
bandpass sampling techniques whereby the bandpass signal is sampled directly.
January 31, 2013 DRAFT

8
-140 -120 -100 -80 -60 -40 -20 0 20 40 60 80 100 120 140
10
20
30
40
Frequency (Hz)
Power Loss in dB
n=8
n=4n=3
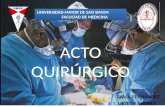
Fig. 1. Maximally Flat filter responses (-10 log10
∣∣∣H(f)H(f)
∣∣∣2
) for different values of n with a
cut-off frequency of 100 Hz.
Note that the response of this filter meets its cut-off point (i.e.,
∣∣∣H(fc)H(0)
∣∣∣2
= 11+k2
) at fc regardless
of the value of n.Also, if one selects k = 1, the cut-off point coincides with the 3 dB point.
This filter provides a flat response in the pass-band (see Fig. 1). Therefore, the design reduces
to choosing a value for n so that a given level of out of band rejection can be accommodated.
2) Equal Ripple (ER): For this filter, the response of the filter suffers distortion in the pass-
band in the form of ripples, while the out of band response decays at a rate higher than that of
the MF filter. For this filter, the response is given by∣∣∣∣H (f)
H (0)
∣∣∣∣2
=1
1 + k2T 2n
(f
fc
) (13)
where
T 2n (x) =
cos (n cos−1 (x)) |x| ≤ 1
cosh(n cosh−1 (x)
)|x| > 1
The ripple in this case is defines as (T 2n (x) ≥ 1)
ripple=10 log10(1 + k2
)
In this case, the filter response fluctuates between 1 and 11+k2
. Unlike MF filter, one has to choose
a small k to prevent non-negligible distortion in the pass-band. Typically, k is defined by the
DRAFT January 31, 2013

9
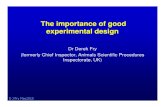
maximum tolerable ripple in the pass-band. The response of this filter is depicted in Fig. 2.
-140 -120 -100 -80 -60 -40 -20 0 20 40 60 80 100 120 140
10
20
30
Frequency (Hz)
Powe rLoss in dBn=8
n=4
n=3
Fig. 2. Equal Ripple filter responses (-10 log10
∣∣∣H(f)H(f)
∣∣∣2
) for different values of n with a cut-off
frequency of 100 Hz with k1 = 1 (3 dB ripple).
Note that ER filter provides a significantly large rate of decay outside the pass-band as compared
to the MF filter at a cost of distortion in the pass-band.
3) Linear Phase (LP): Linear phase filters are required to have an amplitude response that
remains constant over the passband while the phase of the response, i.e., ∠H (f), is supposed
to be kf with k denoting a design constant.
4) Filter Realization:
a) Low-pass filter (LPF): So far, we have discussed LPFs with a cut-off frequency of 1
Hz.In practice, we are required to design filters with an fc other than 1. In Fig. 5 depicts a
prototype structure, consisting of capacitors, inductors, and resistors, which can realize any of
the responses discussed above (we refer to this as prototype). The values of the elements can
be determined using Tables 1-3 (see Refs. [1] and [2]). However, note that the table is designed
for 2πfc = 1 (this must be taken into account when frequency scaling is performed). The main
advantage of this implementation is that it allows one to design filters up to RF/Microwave
frequencies (GHz range).
b) Frequency scaling: If the desired low-pass filter cut-off frequency is fc Hz, then the
values of the frequency scaling is kf = 2πfc. Then, the elements are changed according to the
January 31, 2013 DRAFT

10
Fig. 1. Table 1. The protoype filter values for 2πfc = 1 for maximally-flat filter.
Fig. 2. Table 2 (a). The protoype filter element values for 2πfc = 1 for equal-ripple (0.5 dB) filter.
DRAFT January 31, 2013

11
Fig. 3. Table 2 (b). The protoype filter element values for 2πfc = 1 for equal-ripple (3 dB) filter.
Fig. 4. Table 3. The protoype filter element values for 2πfc = 1 for maximally-flat time-delay (linear phase) filter.
January 31, 2013 DRAFT

12
Fig. 5. A LPF prototype with 2πfc = 1.
following:
C →C
kf(14)
L →L
kf(15)
c) Magnitude Scaling: Further scalings can be performed to adjust the values of the
components without changing the filter response. If a scaling of ka is applied, all components
must be scaled according to the following:
C →C
kfka(16)
L →kaL
kf(17)
R → kaR (18)
Since the filter prototype expects a source with 1 Ω impedance, and majority of sources present
a 50 Ω impedance, an amplitude scaling of ka = 50. To avoid the impact of loading, we may
use voltage-followers (single op-amps). It is important to note that the amplitude scaling must
DRAFT January 31, 2013

13
be applied at the last stage of the design and that the amplitude scaling process remains the
same for all types of filter design.
Example 1:
Design a low-pass, maximally flat filter with a cut-off frequency of 1 MHz. Assume that the
cut-off point is at 3 dB. The filter must provide a minimum power attenuation of 20 dB at 2
MHz.
Solution:
3 dB cut-off→ k2 = 1. We now have to find a value for n such that
−10log101
1 + (2/1)2n≥ 20→ n = 4
will insure the proper attenuation.Using Table 1, we have the following value for
g1 = 0.7654, g2 = 1.8478,
g3 = 1.8478, g4 = 0.7654, g5 = 1.
Since the prototype filter is design for ωc = 1 rad/sec, one requires kf = 2π(106). Also, since
we desire to terminate the circuit to a 50 Ω, we choose ka = 50. The resulting values are
R0 = 50 Ω, C1 =0.7654
2π106 × 50= 2.43 nF,
L2 =1.8478
2π10650 = 14.70 µH, C3 =
1.8478
2π106 × 50= 5 .88 nF,
L4 =0.7654
2π10650 = 6 µH, and R5 = 50 Ω.
This circuits is shown in Fig. 6. Note that, in this design, the circuit expects a 50 Ω source
and terminates into a 50 Ω load, which will result in no loading effect if the preceding as well
as following sections expect 50 Ω loads. The response of this filter is simulated using PSpice
and shown in Fig. 7, which meets the spec. The voltage depicted is -20 log10 (Vout). We use a
factor of 20 since we deal with voltage levels and not power levels in PSpice.
January 31, 2013 DRAFT

14
Fig. 6. A MF-LPF with a cut-off (3 dB) frequency of 1 MHz and 20 dB of attenuation at 2 MHz.
d) High-pass filter (HPF): In the case of high-pass filter design, a low-pass filter with 2πfc
of 1 is designed (see above example). Then, the inductors and capacitors are modifies as follows:
L → C ′ =L
kf
C → L′ =1
Ckf
That is, an inductor with inductance L is replace by a capacitor with the capacitance Lkf
while a
capacitor with capacitance C is replaced with an inductor with inductance 1Ckf
. Note that L and
C are values before frequency scaling. Following this step, one can use ka (amplitude scaling)
to get more desirable values.
e) Band-Pass Filter (BPF) and Band-Stop Filters (BSF): A slightly different approach is
used in these cases. For this case, the prototype circuit, which is designed to meet certain out of
band rejection level, is mapped directly. For a band-pass filter, one has to define the following: f0,
f1, and f2 (see figure on page 16). Note that f1 = 80 Hz and f2 = 120 Hz are the cut-off points
(in this case 3 dB) about the center frequency f0. In general, the response of a maximally-flat
DRAFT January 31, 2013

15
Fig. 7. Response of the LPF with cut-off frequency of 1 MHz and 20 dB of attenuation at 2 MHz.
band-pass filter (MF-BPF) can be expressed as
∣∣∣∣H (f)
H (0)
∣∣∣∣2
=1
1 + k2(2∣∣∣ |f |−f0(f2−f1)
∣∣∣)2n (19a)
where f0, f1, and f2 were defined above. Note that, in this case, fc =f2−f12
is the cut-off
frequency for the equivalent low-pass filter.
January 31, 2013 DRAFT

16
-140 -120 -100 -80 -60 -40 -20 0 20 40 60 80 100 120 140
10
20
30
40
Frequency (Hz)
Power Loss in dB
n=4
n=3
n=2
Maximally Flat band-pass filter responses (-10 log10
∣∣∣H(f)H(f)
∣∣∣2
) for different values of n with
f0 = 100 Hz, f1 = 80, and f2 = 120 Hz.
Let us define
∆ =f2 − f1
f0(20)
∆ may be viewed as the % bandwidth of the filter. Now, once an equivalent low-pass prototype
is designed, we perform the following mappings on all inductor and capacitors (note that each
component is mapped onto either a series or a parallel combination of two components):
L → inductor L′ =L
2πf0∆in series with capacitor C ′ =
∆
2πf0L(21)
C → inductor L′ =∆
2πf0Cin parallel with capacitor C ′ =
C
2πf0∆(22)
Magnitude scaling may then be applied to get to the 50 Ω input/output impedances. For band-
stop filter (where the response is the inverse of the band-pass response), we need to perform the
following transformation:
L → inductor L′ =L∆
2πf0in parallel with capacitor C ′ =
1
2πf0L∆(23)
C → inductor L′ =1
2πf0C∆in series with capacitor C ′ =
C∆
2πf0(24)
DRAFT January 31, 2013

17
For the equal-ripple band-pass filter (BER-BPF) case,∣∣∣∣H (f)
H (0)
∣∣∣∣2
=1
1 + k2T 2n
(2∣∣∣ |f |−f0(f2−f1)
∣∣∣) (25a)
A similar procedure can be used to design the ER-BPF as well. Note that we need to first identify
fc for the equivalent LPF in order to determine n. Once n is found and the prototype filter is
obtained, the above transformations can be used to find the final circuit. In the ensuing example,
we design an ER-BPF using the above procedure.
Example 2:
Design an ER-BPF with maximum ripple of 0.5 dB with a center frequency of 1 GHz and
10% bandwidth (∆ = 0.1). Assume that the filter provides an attenuation of 30 dB at |f − f0| =
3(f0 − f1) = 3 (f2 − f0).
Solution
The above implies that f1 and f2 are located symmetrically about f0. Also, ∆ = 0.1. In this
case,
fc =f2 − f12
=∆f02= 50 MHz
for the low-pass equivalent filter. The requirement of
|f − f0| = 3(f0 − f1) = 3 (f2 − f0)
is identical to having an equivalent low-pass filter with a power attenuation of at least 30 dB
at f = 3fc (three times the cut-off frequency). Also, a ripple of 0.5 dB leads to k2 = 100.05 −
1 =0.122. Realizing that
−10 log101
1 + 0.122 cosh2(n cosh−1 (3)
) = 30.7 dB (≥ 30)
for n = 3 (you can use trial-and-error to get this number as the value of n is an integer, which
is limited to a small range of [2, 8] for most practical problems), we can now implement the
low-pass filter as a 3rd order filter. This implies that for the low-pass prototype (see Table 2)
circuit we have two resistors (g0 = g4 = 1), two capacitors (g1 = 1.596 and g3 = 1.5963), and
one inductor (g2 = 1.0967). Performing the transformations stated above, we get the following
components:
L′1 = 0.498 nH in parallel with C ′1 = 50.8 pF,
L′2 = 87.27 nH in series with C ′2 = 0.29 pF,
January 31, 2013 DRAFT

18
Fig. 8. A ER-BPF with the center frequency of 1 GHz, 10% bandwidth, 0.5 dB of passband ripple, and an attenuation of 30
dB at 3 times the cut-off frequency.
L′3 = 0.498 nH in series with C ′3 = 50.8 pF.
This circuit along with its response are shown in Figs. 8 and 9. Note that the filter power
attenuation (-20 log10
(Vout
max(Vout)
)) meets the design specification. That is, the power attenuation
increases to 3 dB at (1 + ∆2)f0 =1.05 GHz, i.e., cut-off point, and exceeds 30 dB at 3fc point
(that is f = f0 + 3fc = 1.15 GHz).
VI. REFERENCES
1) David Posar, Microwave Engineering, 3rd ed. , John Wiley and Sons, 2005 (chapter 8).
2) G. L. Matthaie, L. Young, and E. M. T. Jones, Microwave Filters, Impedance-Matching
Networks, and Coupling Structures (Dehham, Massd: Artech House, 1980).
DRAFT January 31, 2013

19
Fig. 9. The response of an ER-BPF with the center frequency of 1 GHz, 10% bandwidth, 0.5 dB of passband ripple, and an
attenuation of 30 dB at 3 times the cut-off frequency.
January 31, 2013 DRAFT