Examining body size-characteristics on collision avoidance … · 2019. 6. 20. ·...
1
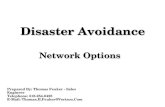
• AP spatial requirements significantly increased as interferer proximity increased (Fig. 1). • Consistent with literature that found people tend to initiate an avoidance behaviour at ~4m when given the opportunity [2,3]. • Significantly smaller approach velocities in the 2m and 4m conditions compared to control (Fig 2). • Indicates that subjects did not reach locomotor steady state prior to initiating a path deviation [5]. • A cautious approach may be due to the interferer already being within participants' “safety zone” [6]. • ML spatial requirements decreased when interacting with the smaller body sized interferer (Fig. 3) and when the interferer was oriented sideways, which decreased the width of both interferers (Fig. 4). • Opposite to the behavioural dynamics model [2], which treats objects as points without physicality. Situational-characteristics primarily effect individuals’ behaviours; size- characteristics only influence the amount of ML space required for circumvention. Individuals' behaviours will be more affected by the larger interferer, resulting in greater spatial requirements. Examining body size-characteristics on collision avoidance behaviour in human locomotion Sheryl M. Bourgaize 1 , Bradford J. McFadyen 2,3 , and Michael E. Cinelli 1 1 Department of Kinesiology & Physical Education, Wilfrid Laurier University, Waterloo, ON Canada 2 Department of Rehabilitation, Faculty of Medicine, Université Laval, Québec City, QC 3 Centre for Interdisciplinary Research in Rehabilitation and Social Integration, Québec City, QC To identify the behaviours of young adults during a collision avoidance paradigm with two different sized stationary interferers at different proximities & orientations. FINDINGS • Collision avoidance during human navigation takes into account the interaction between the environment and the observer • Visual information guides locomotion [1] • Collision avoidance strategies are affected by situational-characteristics [2] • Previous research has utilized inanimate objects (i.e. mannequins, poles) [3,4] • Humans’ avoidance behaviours differ when avoiding people versus poles [4] • Do person-specific characteristics* affect collision avoidance behaviours? • Larger vs smaller individual* Participants: • 20 adults (10 males) 21.8±2.4 years Experimental Set-up: • Trunk kinematics were collected using the NDI Optotrak motion capture system (100Hz) • Total of 75 walking trials were completed • Participants walked along an 8m pathway towards a goal while avoiding an interferer Conditions: 1. Interferer Size: larger or smaller male 2. Interferer Proximity: 2m, 4m, or 6m 3. Interferer Orientation: forward, backward, left, or right Data Analysis: • 2x2x3x4 repeated measures ANOVAs for gender, interferer size, proximity, and orientation • Paired samples T-Tests for comfort and approach velocities Figure 1: Mean ± SD AP spatial requirement (m) at initial path deviation across interferer proximity (*p<.001). HYPOTHESIS PURPOSE RESULTS INTRODUCTION METHODOLOGY REFERENCES [1] Patla A.E. (1997). Gait & Posture. 5: 54–69. [2] Fajen B.R. (2013). Front Behave Neurosci. 7; 85. [3] Gérin-Lajoie M., Richards C.L., McFadyen B.J. (2005). Motor Control. 9; 242-269. [4] Souza Silva W., et al. (2018). Gait & Posture. 61: 294-300. [5] Jian Y., et al. (1993). Gait & Posture. 1: 9-22. [6] Cinelli M.E., Patla A.E. (2008). Gait & Posture. 28: 596-601. Sheryl Bourgaize PhD Student [email protected] Figure 4: Mean ± SD ML spatial requirement (m) at the time of crossing depending on interferer orientation (*p<.05). Significant main effect of interferer proximity on the AP spatial requirements and approach velocity DISCUSSION & CONCLUSIONS Significant main effect of interferer orientation on ML spatial requirements P1 – V – 158 Figure 2: Mean ± SD Approach Velocity (m/s) across interferer proximity and control walking speed (*p<.001). 0 0.4 0.8 1.2 1.6 2 Metres 4 Metres 6 Metres Control Approach Velocity (m/s) Interferer Proximity * Significant main effect of interferer body size on ML spatial requirements Figure 3: Mean ± SD ML spatial requirement at the time of crossing depending on interferer body size characteristics (*p<.05). 0 0.2 0.4 0.6 0.8 1 Forward Backward Left Right ML Spatial Requirement (m) Interferer Orientation * 0 1 2 3 4 5 6 7 2 Metres 4 Metres 6 Metres AP Spatial Requirement (m) Interferer Proximity * 0 0.2 0.4 0.6 0.8 1 Small Large ML Spatial Requirement (m) Interferer Body Size *
Transcript of Examining body size-characteristics on collision avoidance … · 2019. 6. 20. ·...

• AP spatial requirements significantly increased as interferer proximity increased (Fig. 1). • Consistent with literature that found people tend to initiate an avoidance behaviour at ~4m when
given the opportunity [2,3].
• Significantly smaller approach velocities in the 2m and 4m conditions compared to control (Fig 2).• Indicates that subjects did not reach locomotor steady state prior to initiating a path deviation [5].• A cautious approach may be due to the interferer already being within participants' “safety zone” [6].
• ML spatial requirements decreased when interacting with the smaller body sized interferer (Fig. 3) and when the interferer was oriented sideways, which decreased the width of both interferers (Fig. 4).• Opposite to the behavioural dynamics model [2], which treats objects as points without physicality.
Situational-characteristics primarily effect individuals’ behaviours; size-characteristics only influence the amount of ML space required for
circumvention.
Individuals' behaviours will be more affected by the larger interferer,
resulting in greater spatial requirements.
Examining body size-characteristics on collision avoidance behaviour in human locomotion
Sheryl M. Bourgaize1, Bradford J. McFadyen2,3, and Michael E. Cinelli1
1 Department of Kinesiology & Physical Education, Wilfrid Laurier University, Waterloo, ON Canada2 Department of Rehabilitation, Faculty of Medicine, Université Laval, Québec City, QC
3 Centre for Interdisciplinary Research in Rehabilitation and Social Integration, Québec City, QC
To identify the behaviours of young adults during a collision avoidance paradigm with two different sized stationary interferers at different
proximities & orientations.
FINDINGS
• Collision avoidance during human navigation takes into account the interaction between the environment and the observer
• Visual information guides locomotion [1]
• Collision avoidance strategies are affected by situational-characteristics [2]
• Previous research has utilized inanimate objects (i.e. mannequins, poles) [3,4]
• Humans’ avoidance behaviours differ when avoiding people versus poles [4]
• Do person-specific characteristics* affect collision avoidance behaviours?• Larger vs smaller individual*
Participants: • 20 adults (10 males) 21.8±2.4 years
Experimental Set-up: • Trunk kinematics were collected using the
NDI Optotrak motion capture system (100Hz)• Total of 75 walking trials were completed• Participants walked along an 8m pathway towards
a goal while avoiding an interferer
Conditions:1. Interferer Size: larger or smaller male2. Interferer Proximity: 2m, 4m, or 6m3. Interferer Orientation: forward, backward, left, or right
Data Analysis: • 2x2x3x4 repeated measures ANOVAs for gender, interferer size, proximity, and orientation• Paired samples T-Tests for comfort and approach velocities
Figure 1: Mean ± SD AP spatial requirement (m) at initial path deviation across interferer proximity (*p<.001).
HYPOTHESISPURPOSE
RESULTS
INTRODUCTION METHODOLOGY
REFERENCES[1] Patla A.E. (1997). Gait & Posture. 5: 54–69. [2] Fajen B.R. (2013). Front Behave Neurosci. 7; 85.[3] Gérin-Lajoie M., Richards C.L., McFadyen B.J. (2005). Motor Control. 9; 242-269.[4] Souza Silva W., et al. (2018). Gait & Posture. 61: 294-300.[5] Jian Y., et al. (1993). Gait & Posture. 1: 9-22.[6] Cinelli M.E., Patla A.E. (2008). Gait & Posture. 28: 596-601.
Sheryl Bourgaize PhD Student
Figure 4: Mean ± SD ML spatial requirement (m) at the time of crossing depending on interferer orientation (*p<.05).
Significant main effect of interferer proximity on the AP spatial requirements and approach velocity
DISCUSSION & CONCLUSIONS
Significant main effect of interferer orientation on ML spatial requirements
P1 – V – 158
Figure 2: Mean ± SD Approach Velocity (m/s) across interferer proximity and control walking speed (*p<.001).
0
0.4
0.8
1.2
1.6
2 Metres 4 Metres 6 Metres Control
Appr
oach
Vel
ocity
(m/s
)
Interferer Proximity
*
Significant main effect of interferer body size on ML spatial requirements
Figure 3: Mean ± SD ML spatial requirement at the time of crossing depending on interferer body size characteristics (*p<.05).
0
0.2
0.4
0.6
0.8
1
Forward Backward Left Right
ML
Spat
ial R
equi
rem
ent (
m)
Interferer Orientation
*
0
1
2
3
4
5
6
7
2 Metres 4 Metres 6 Metres
AP S
patia
l Req
uire
men
t (m
)
Interferer Proximity
*
0
0.2
0.4
0.6
0.8
1
Small Large
ML
Spat
ial R
equi
rem
ent (
m)
Interferer Body Size
*