Evolving Motor Techniques for Artificial Life Kelley Hecker, Period 7.
17
Evolving Motor Techniques for Artificial Life Kelley Hecker, Period 7
-
Upload
reynold-merritt -
Category
Documents
-
view
214 -
download
0
Transcript of Evolving Motor Techniques for Artificial Life Kelley Hecker, Period 7.

Evolving Motor Techniques for Artificial Life Kelley Hecker, Period 7

Abstract
Creatures' fitness values improve from generation to generation
Co-evolution Both the body and the brain
develop Possibility of specialized
creatures

Methodology:Genome
Genome represented by a one-dimensional array
Each array has several nodes Nodes represent body
segments Each node contains dimensions
for body part, location of parent and child connections, and neuron functions
Genome converted to physical form for simulation

Example Genomes Root Node:
Length: 3, Width: 2, Height: 2 Child 0:
Length: 2, Width: 2, Height: 3 Child 1:
Length: 1, Width: 4, Height: 4 Child 2:
Length: 1, Width: 3, Height: 4 Child 3:
Length: 1, Width: 3, Height: 2
Example GenomesExample Genomes
Note: Each node also contains the neuron data, but since this cannot be seen physically I did not list it
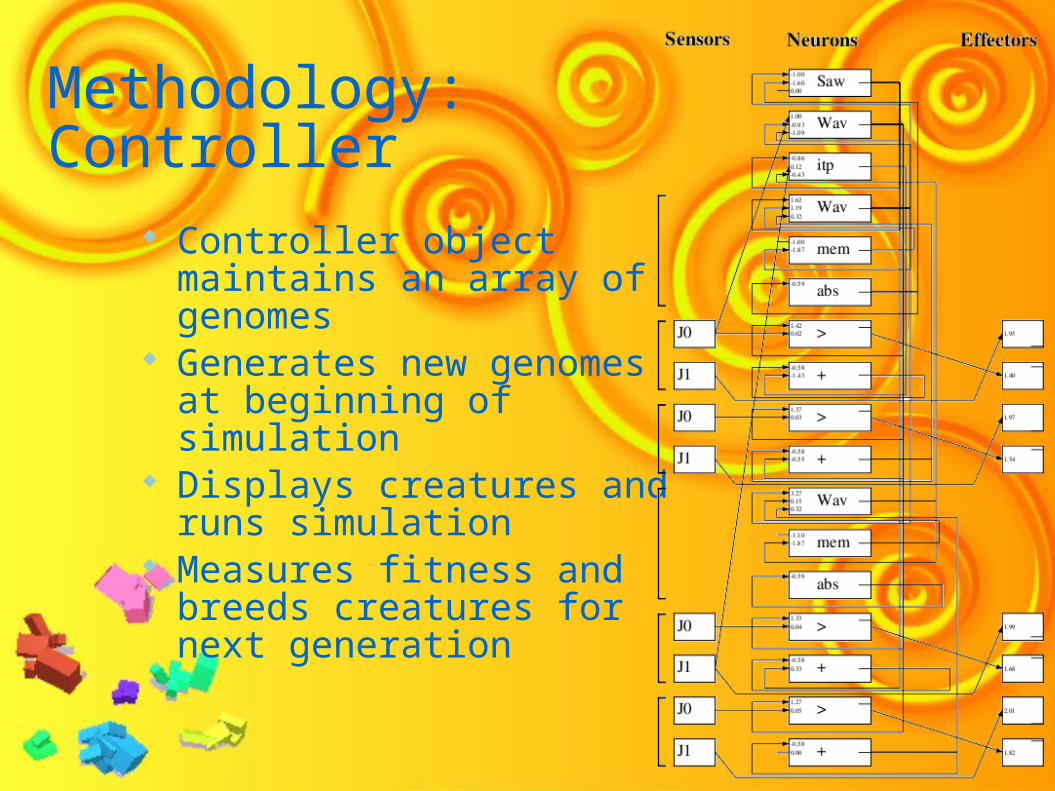
Methodology:Controller
Controller object maintains an array of genomes
Generates new genomes at beginning of simulation
Displays creatures and runs simulation
Measures fitness and breeds creatures for next generation

Methodology:Nodes
Physical dimensions Where the body segment
connects to its parent and children segments
Neuron functions Methods to add children and
connection points Accessor methods return
children, dimensions and neurons

Methodology:Creature GA
Applies neuron functions to sensor values
Possible neuron functions: Oscillating functions: sin, cos, atan,
saw-wave Other functions: sum-threshold,
sign-of, min, max, mem, log, expt, devide, interpolate, differentiate
Returns joint velocity values for the associated body segment

Circulation of Data
Values received from
joint-angle sensors
Values sent to the GA, where they are put
through node's neurons
Values become
effectors and modify joint
velocity

Reproduction
Creatures are evaluated based on their performance in the simulation
Top half of genomes copied directly (asexual)
Remaining 1/2 of genomes are crossed over in pairs

Crossover

Crossover
Children have both physical and control traits of their parents
A portion of the limbs will be physically the same and controlled in the same way as one of the parents, while the remaining limbs will be identical to the second parent
Allows for co-evolution: both the body and brain change

Simulation Process
Population is simulated in the physical environment
All of the creatures are displayed at once
Final fitnesses are evaluated and reproduced
Repeated with next generation for n generations

Example Simulation
One creature is copied directly to the second generation. Can you tell which one?
http://www.youtube.com/watch?v=a_jyKuzrBRM

Testing
Fitness tests Measures the success of a
motor method Progression of fitness level
shows evolution of technique Create graph of fitness level over
time

Results
Results had a consistent upwards trend, but varied on the amount of improvement
Some graphs showed a levelling off or decrease in the later generations (100+), but after adding mutation this rarely happened
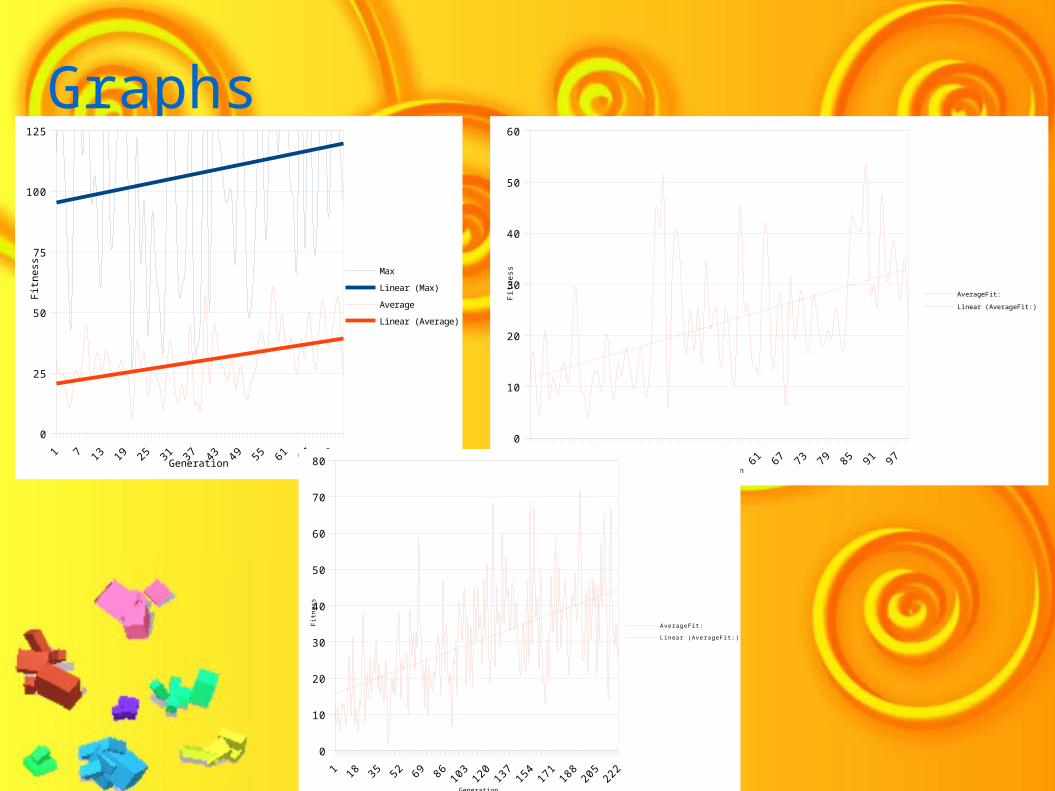
Graphs
1 6 11 16 21 26 31 36 41 46 51 56 61 66 71 76
0
25
50
75
100
125
Max
Linear (Max)
Average
Linear (Average)
Generation
Fitn
ess
1 6 11 16 21 26 31 36 41 46 51 56 61 66 71 76 81 86 91 96
0
10
20
30
40
50
60
AverageFit:
Linear (AverageFit:)
Generation
Fitn
ess
1 15 29 43 57 71 85 99 113
127
141
155
169
183
197
211
0
10
20
30
40
50
60
70
80
AverageFit:
Linear (AverageFit:)
Generation
Fitn
ess

Potential Creatures