
Evolutionary Robotics Evolutionary Robotics for Swarms.
14
Evolutionary Robotics Evolutionary Robotics for Swarms
-
Upload
justin-pope -
Category
Documents
-
view
251 -
download
1
Transcript of Evolutionary Robotics Evolutionary Robotics for Swarms.
Evolutionary RoboticsEvolutionary Robotics for Swarms
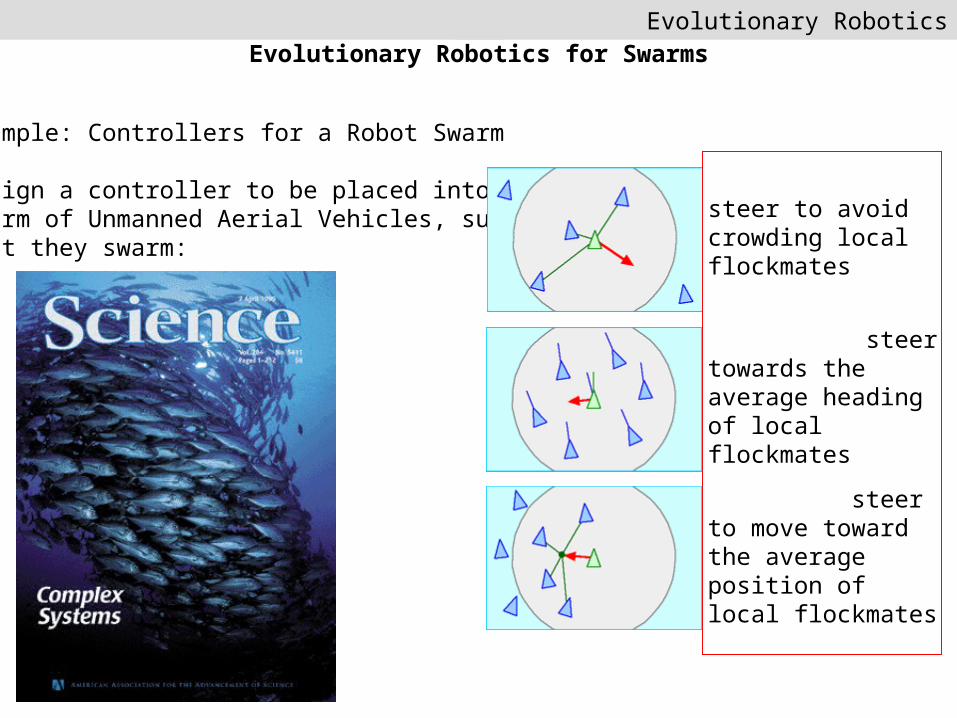
Example: Controllers for a Robot Swarm
Design a controller to be placed into aswarm of Unmanned Aerial Vehicles, suchthat they swarm:
Separation: steer to avoid crowding local flockmates
Alignment: steer towards the average heading of local flockmates
Cohesion: steer to move toward the average position of local flockmates
Evolutionary RoboticsEvolutionary Robotics for Swarms
Example: Controllers for a Robot Swarm
Design a controller to be placed into aswarm of Unmanned Aerial Vehicles, suchthat they swarm:
Evolutionary RoboticsEvolutionary Robotics for Swarms
Evolutionary RoboticsEvolutionary Robotics for Swarms
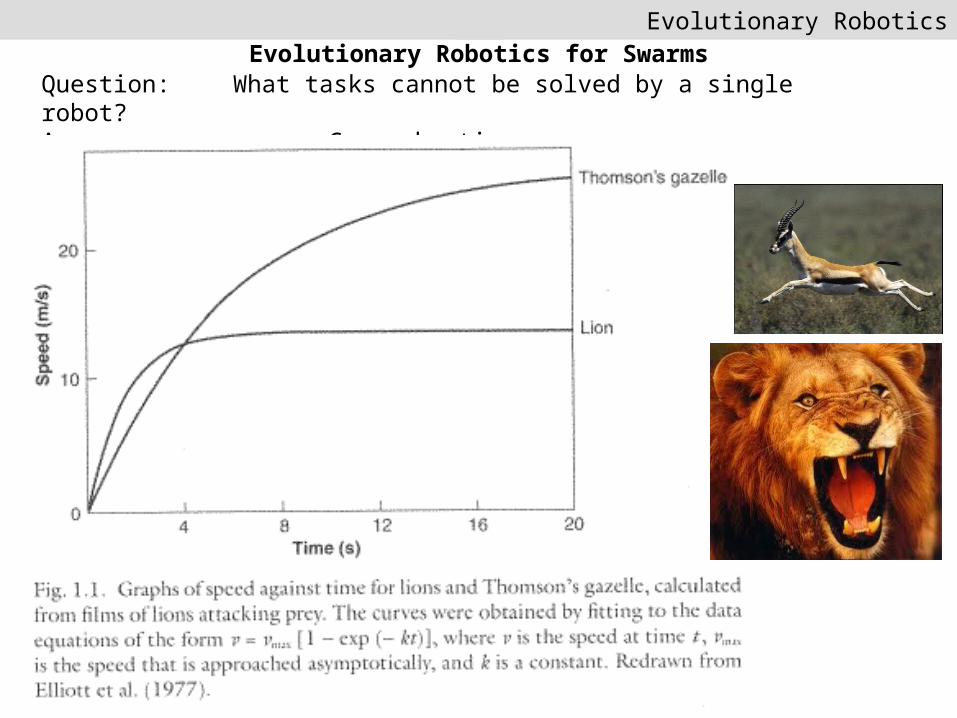
Question: What tasks cannot be solved by a single robot?Answer: Group hunting
Evolutionary RoboticsEvolutionary Robotics for Swarms
Question: Can we evolve behaviors for a team of predators?How?Will they evolve to cooperate?
Luke, S., Spector, L. (1996) Evolving teamwork and coordination with genetic programming. In Procs. of the First Annual Conference on Genetic Programming, pp. 150-156.
Evolutionary RoboticsEvolutionary Robotics for Swarms
Luke, S., Spector, L. (1996) Evolving teamwork and coordination with genetic programming. In Procs. of the First Annual Conference on Genetic Programming, pp. 150-156.
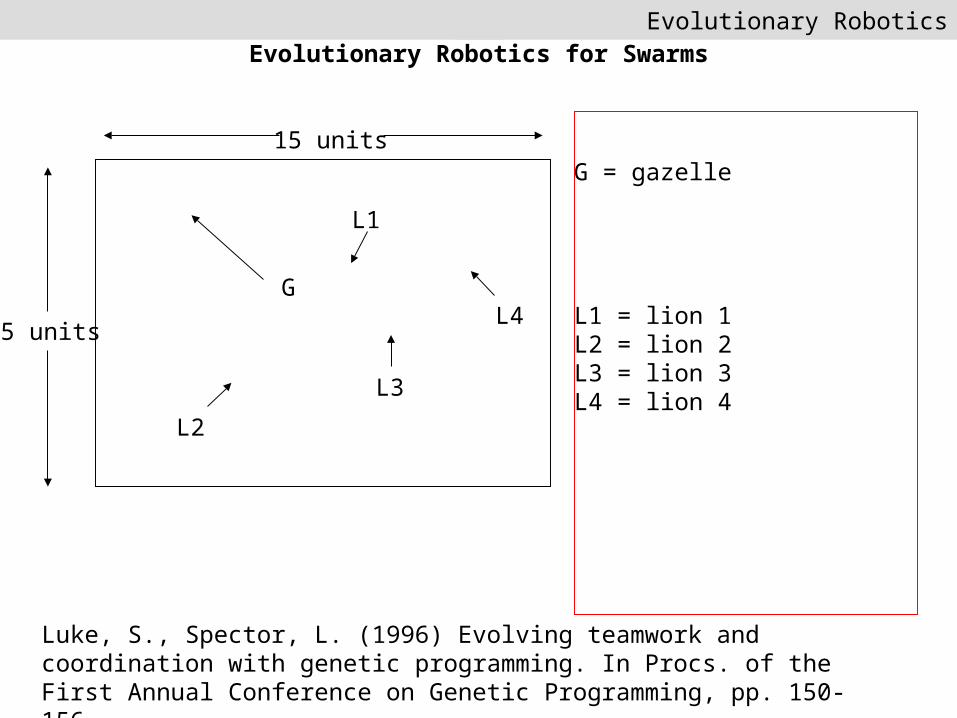
15 units
15 units
G
L2
L3
L1
L4
G = gazelle
L1 = lion 1L2 = lion 2L3 = lion 3L4 = lion 4
Evolutionary RoboticsEvolutionary Robotics for Swarms
Luke, S., Spector, L. (1996) Evolving teamwork and coordination with genetic programming. In Procs. of the First Annual Conference on Genetic Programming, pp. 150-156.
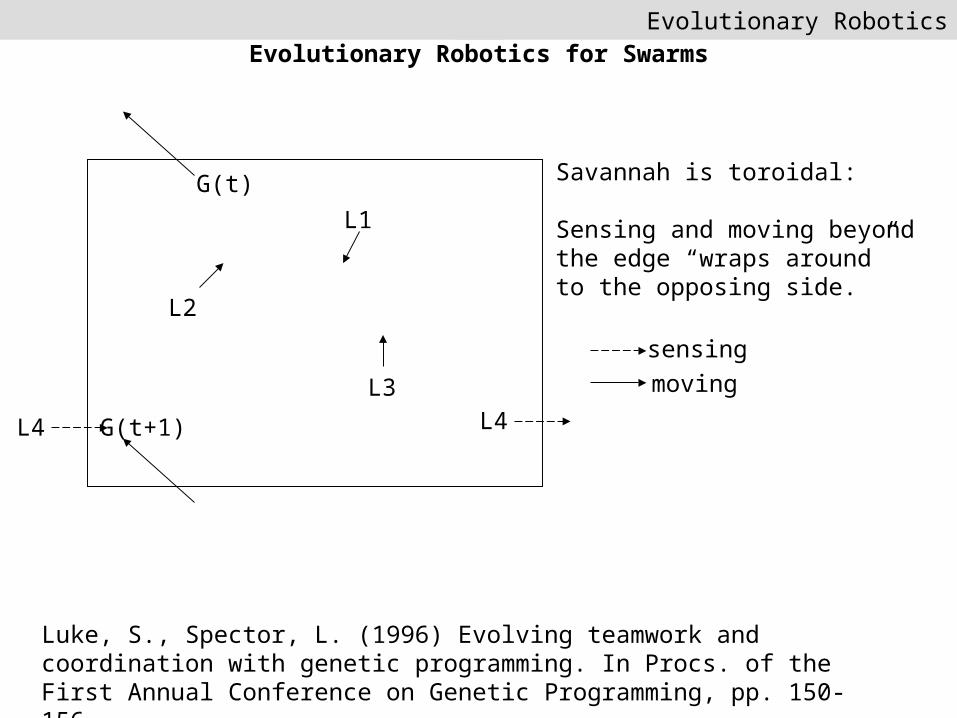
G(t)
L2
L3
L1
L4
Savannah is toroidal:
Sensing and moving beyondthe edge “wraps around”to the opposing side.
G(t+1)L4
sensing
moving
Evolutionary RoboticsEvolutionary Robotics for Swarms
Luke, S., Spector, L. (1996) Evolving teamwork and coordination with genetic programming. In Procs. of the First Annual Conference on Genetic Programming, pp. 150-156.
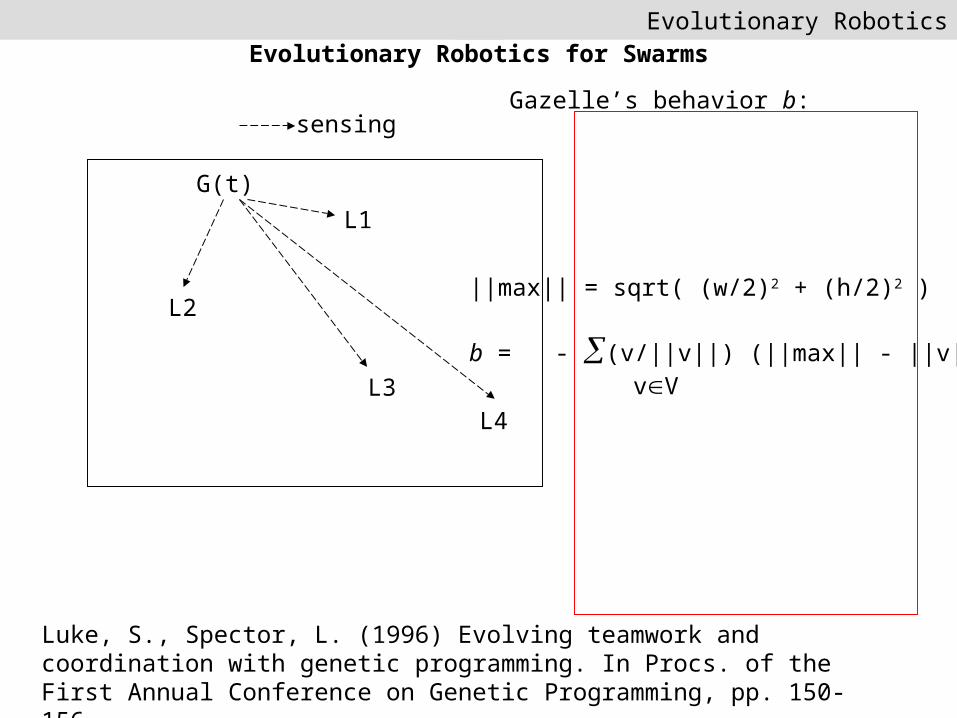
G(t)
L2
L3
L1
L4
Gazelle’s behavior b:sensing
||max|| = sqrt( (w/2)2 + (h/2)2 )
b = - (v/||v||) (||max|| - ||v||)vV
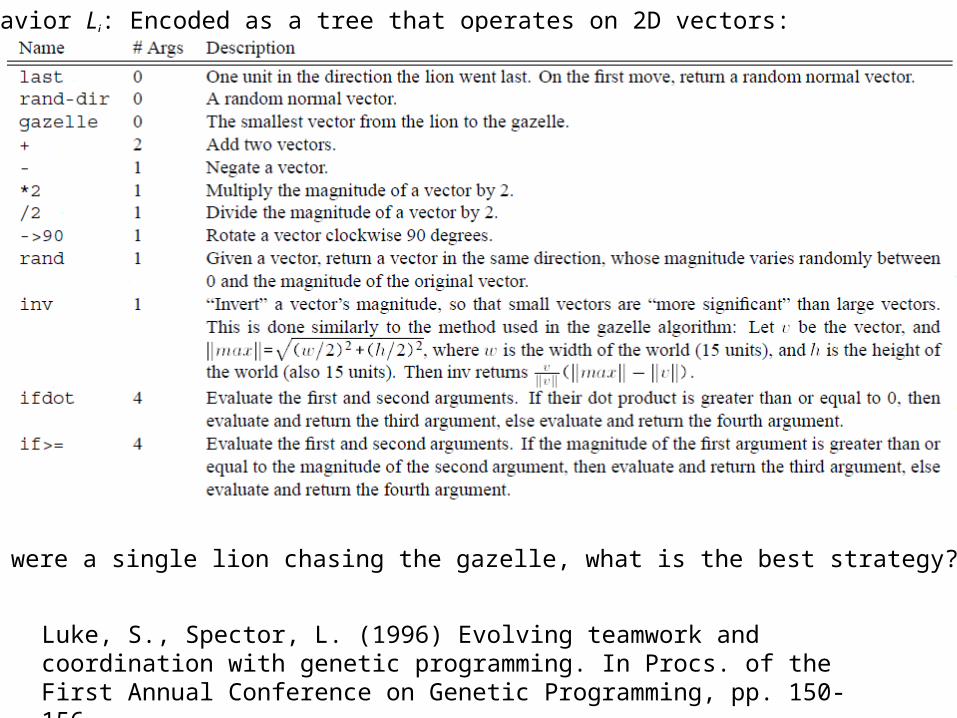
Lion’s behavior Li: Encoded as a tree that operates on 2D vectors:
Luke, S., Spector, L. (1996) Evolving teamwork and coordination with genetic programming. In Procs. of the First Annual Conference on Genetic Programming, pp. 150-156.
Q: If you were a single lion chasing the gazelle, what is the best strategy?
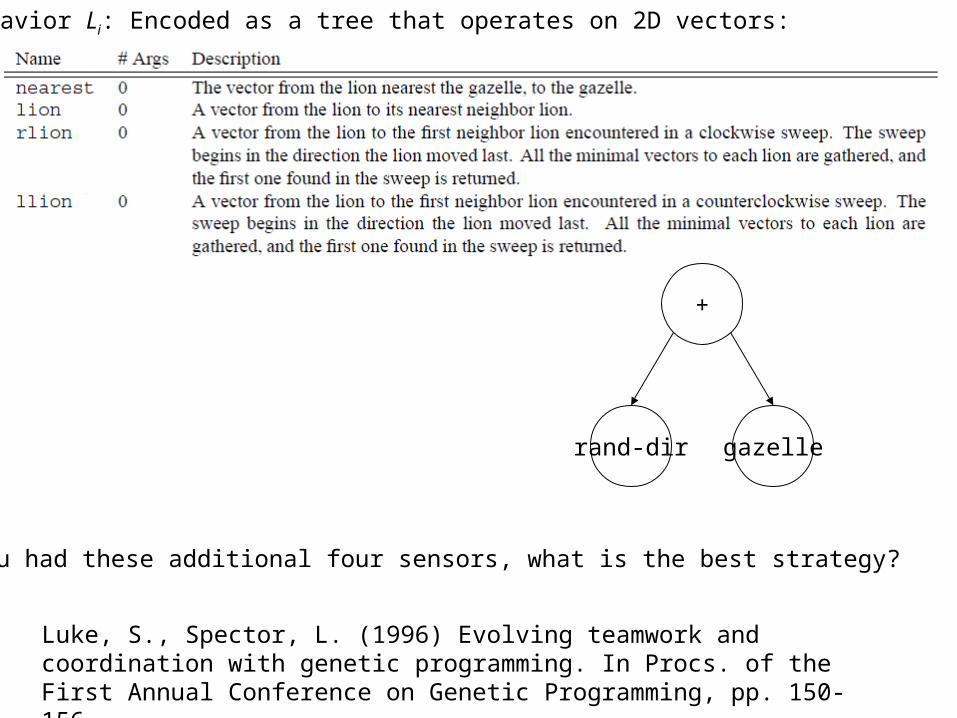
Lion’s behavior Li: Encoded as a tree that operates on 2D vectors:
Luke, S., Spector, L. (1996) Evolving teamwork and coordination with genetic programming. In Procs. of the First Annual Conference on Genetic Programming, pp. 150-156.
Q: If you had these additional four sensors, what is the best strategy?
+
rand-dir gazelle
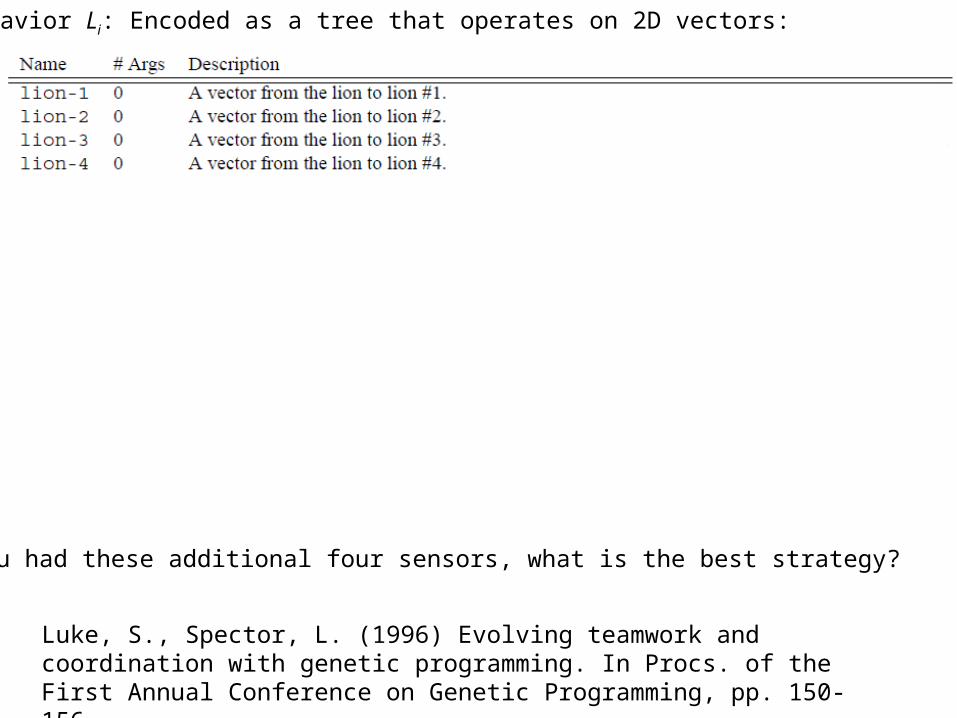
Lion’s behavior Li: Encoded as a tree that operates on 2D vectors:
Luke, S., Spector, L. (1996) Evolving teamwork and coordination with genetic programming. In Procs. of the First Annual Conference on Genetic Programming, pp. 150-156.
Q: If you had these additional four sensors, what is the best strategy?
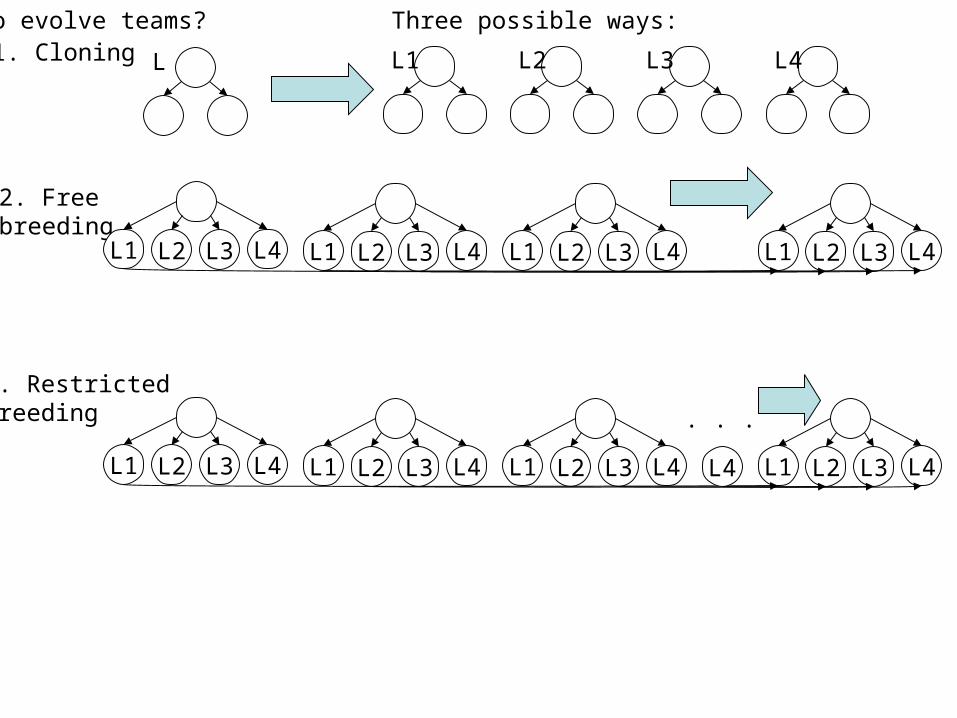
Q: How to evolve teams? Three possible ways:
L L1 L2 L3 L41. Cloning
2. Free breeding
L2 L3 L4L1 L2 L3 L4L1 L2 L3 L4L1 L2 L3 L4L1
L2 L3 L4L1 L2 L3 L4L1 L2 L3 L4L1 L2 L3 L4L1
. . .
L4
3. Restrictedbreeding
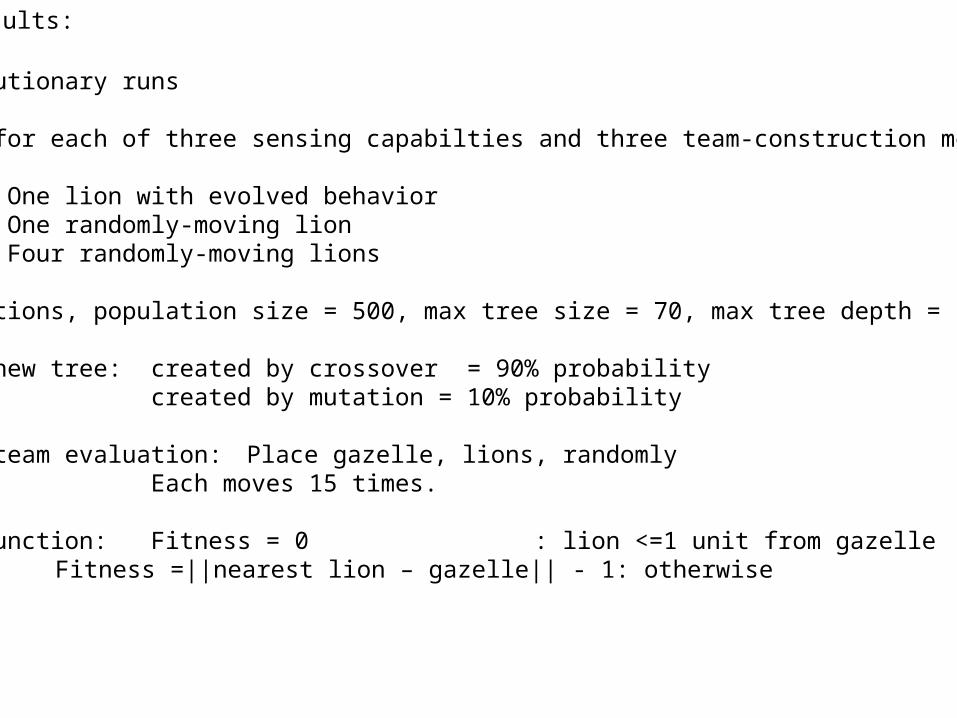
Results:
1200 Evolutionary runs
100 runs for each of three sensing capabilties and three team-construction methods
100 runs: One lion with evolved behavior100 runs: One randomly-moving lion100 runs: Four randomly-moving lions
51 generations, population size = 500, max tree size = 70, max tree depth = 17,
For each new tree: created by crossover = 90% probabilitycreated by mutation = 10% probability
For each team evaluation: Place gazelle, lions, randomlyEach moves 15 times.
Fitness function: Fitness = 0 : lion <=1 unit from gazelleFitness =||nearest lion – gazelle|| - 1: otherwise
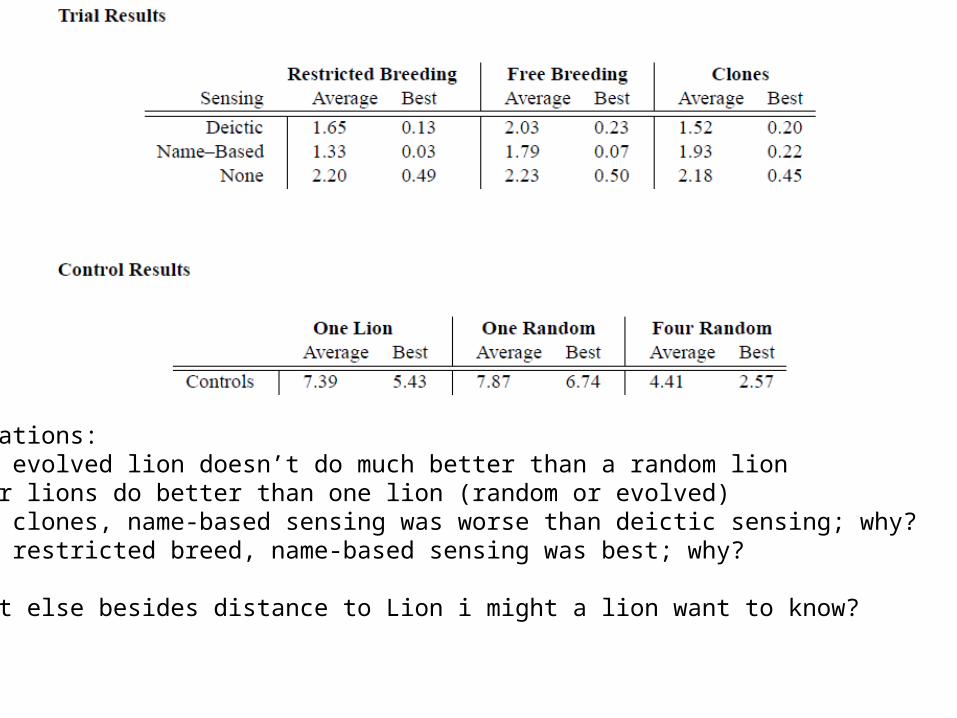
Observations:1. One evolved lion doesn’t do much better than a random lion2. Four lions do better than one lion (random or evolved)3. For clones, name-based sensing was worse than deictic sensing; why?4. For restricted breed, name-based sensing was best; why?
Q: What else besides distance to Lion i might a lion want to know?







![Chapter 1 Evolutionary Robotics: Exploring New Horizonspages.isir.upmc.fr/~bredeche/MyBiblio/ER2011positionER.pdf · Evolutionary Algorithm [7], the practical use of such methods](https://static.fdocuments.net/doc/165x107/5e79b9018ae73f38fe6705c4/chapter-1-evolutionary-robotics-exploring-new-bredechemybiblioer2011positionerpdf.jpg)










