
Essentialformulaes3-euw1-ap-pe-ws4-cws-documents.ri-prod.s3.amazonaws.com/... · Essentialformulae...
16
Essential formulae Number and algebra Laws of indices: a m × a n = a m+n a m a n = a m−n (a m ) n = a mn a m n = n √ a m a −n = 1 a n a 0 = 1 Quadratic formula: If ax 2 + bx + c = 0 then x = −b ± √ b 2 − 4ac 2a Factor theorem: If x = a is a root of the equation f (x ) = 0, then (x − a ) is a factor of f (x ). Remainder theorem: If (ax 2 + bx + c) is divided by (x − p), the remainder will be: ap 2 + bp + c or if (ax 3 + bx 2 + cx + d ) is divided by (x − p), the remainder will be: ap 3 + bp 2 + cp + d Partial fractions: Provided that the numerator f (x ) is of less degree than the relevant denominator, the following identities are typical examples of the form of partial fractions used: f (x ) (x + a )(x + b)(x + c) ≡ A (x + a ) + B (x + b) + C (x + c) f (x ) (x + a ) 3 (x + b) ≡ A (x + a ) + B (x + a ) 2 + C (x + a ) 3 + D (x + b) f (x ) (ax 2 + bx + c)(x + d ) ≡ Ax + B (ax 2 + bx + c) + C (x + d ) Definition of a logarithm: If y = a x then x = log a y Laws of logarithms: log( A × B ) = log A + log B log A B = log A − log B log A n = n × log A Exponential series: e x = 1 + x + x 2 2! + x 3 3! +··· (valid for all values of x ) Hyperbolic functions: sinh x = e x − e −x 2 cosech x = 1 sinh x = 2 e x − e −x cosh x = e x + e −x 2 sech x = 1 cosh x = 2 e x + e −x tanh x = e x − e −x e x + e −x coth x = 1 tanh x = e x + e −x e x − e −x cosh 2 x − sinh 2 = 1 1 − tanh 2 x = sech 2 x coth 2 x − 1 = cosech 2 x Higher Engineering Mathematics. 978-0-415-66282-6, © 2014 John Bird. Published by Taylor & Francis. All rights reserved.
Transcript of Essentialformulaes3-euw1-ap-pe-ws4-cws-documents.ri-prod.s3.amazonaws.com/... · Essentialformulae...

Essential formulae
Number and algebra
Laws of indices:
am × an = am+n am
an= am−n (am)n = amn
amn = n
√am a−n = 1
ana0 = 1
Quadratic formula:
If ax2 + bx + c = 0 then x = −b ± √b2 − 4ac
2a
Factor theorem:
If x =a is a root of the equation f (x)=0, then (x −a)is a factor of f (x).
Remainder theorem:If (ax2 +bx +c) is divided by (x − p), theremainder will be: ap2 +bp +c
or if (ax3 +bx2 +cx +d) is divided by (x − p), theremainder will be: ap3 +bp2 +cp +d
Partial fractions:
Provided that the numerator f (x) is of less degree thanthe relevant denominator, the following identities aretypical examples of the form of partial fractions used:
f (x)
(x + a)(x + b)(x + c)
≡ A
(x + a)+ B
(x + b)+ C
(x + c)
f (x)
(x + a)3(x + b)
≡ A
(x + a)+ B
(x + a)2+ C
(x + a)3+ D
(x + b)
f (x)
(ax2 + bx + c)(x + d)
≡ Ax + B
(ax2 + bx + c)+ C
(x + d)
Definition of a logarithm:
If y =ax then x = loga y
Laws of logarithms:
log(A × B)= log A + log B
log
(A
B
)
= log A − log B
log An = n × log A
Exponential series:
ex = 1 + x + x2
2!+ x3
3!+ ·· ·
(valid for all values of x)
Hyperbolic functions:
sinh x = ex − e−x
2cosech x = 1
sinh x= 2
ex − e−x
cosh x = ex + e−x
2sech x = 1
cosh x= 2
ex + e−x
tanh x = ex − e−x
ex + e−xcoth x = 1
tanh x= ex + e−x
ex − e−x
cosh2 x − sinh2 =1 1 − tanh2 x = sech2 x
coth2 x − 1 = cosech2 x
Higher Engineering Mathematics. 978-0-415-66282-6, © 2014 John Bird. Published by Taylor & Francis. All rights reserved.

Essential formulae 815
Arithmetic progression:
If a =first term and d =common difference, then thearithmetic progression is: a, a +d , a +2d , . . .
The nth term is: a +(n −1)d
Sum of n terms, Sn = n
2[2a +(n −1)d]
Geometric progression:
If a =first term and r =common ratio, then the geomet-ric progression is: a, ar , ar2, . . .
The nth term is: arn−1
Sum of n terms, Sn = a(1−rn)
(1−r)or
a(rn −1)
(r −1)
If −1<r<1, S∞ = a
(1−r)
Binomial series:
(a + b)n = an + nan−1b + n(n − 1)
2!an−2b2
+ n(n − 1)(n − 2)
3!an−3b3 + ·· ·
(1 + x)n = 1 + nx + n(n − 1)
2!x2
+ n(n − 1)(n − 2)
3!x3 + ·· ·
Maclaurin’s series:
f (x)= f (0)+ x f ′(0)+ x2
2!f ′′(0)
+ x3
3!f ′′′(0)+ ·· ·
Newton–Raphson iterative method:
If r1 is the approximate value for a real root of the equa-tion f (x)=0, then a closer approximation to the root,r2, is given by:
r2 = r1 − f (r1)
f ′(r1)
Boolean algebra:
Laws and rules of Boolean algebra
Commutative laws: A+ B = B + A
A · B = B · A
Associative laws: A+ B +C = (A+ B)+C
A · B ·C = (A · B) ·CDistributive laws: A · (B +C)= A · B + A ·C
A+(B ·C)= (A+ B) ·(A+C)
Sum rules: A+ A =1
A+1=1
A+0= A
A+ A = A
Product rules: A · A =0
A ·0=0
A ·1= A
A · A = A
Absorption rules: A+ A · B = A
A ·(A+ B)= A
A+ A · B = A+ B
De Morgan’s laws: A+ B = A · B
A · B = A+ B
Geometry and trigonometry
Theorem of Pythagoras:
b2 = a2 + c2
A
B C
cb
a
Figure FA1
Identities:
secθ = 1
cosθcosec θ= 1
sinθ
cotθ = 1
tanθtanθ = sin θ
cosθ
cos2 θ + sin2 θ = 1 1 + tan2 θ = sec2 θ
cot2 θ + 1 = cosec2 θ
816 Higher Engineering Mathematics
Triangle formulae:
With reference to Fig. FA2:
Sine rulea
sin A= b
sin B= c
sin C
Cosine rule a2 =b2 + c2 − 2bc cos A
A
B C
c
a
b
Figure FA2
Area of any triangle
(i) 12 × base × perpendicular height
(ii) 12 ab sinC or 1
2 ac sin B or 12 bc sin A
(iii)√
[s(s −a)(s −b)(s −c)] where s = a +b+c
2
Compound angle formulae:
sin(A ± B)= sin A cos B ± cos A sin B
cos(A ± B)= cos A cos B ∓ sin A sin B
tan(A ± B)= tan A ± tan B
1 ∓ tan A tan B
If R sin (ωt+α)=a sin ωt+b cos ωt,
then a = R cosα, b = R sinα,
R =√(a2 + b2) and α = tan−1 b
a
Double angles:
sin 2A = 2 sin A cos A
cos2A = cos2 A − sin2 A = 2 cos2 A − 1
= 1 − 2 sin2 A
tan 2A = 2 tan A
1 − tan2 A
Products of sines and cosines into sums ordifferences:
sin A cos B = 12 [sin(A + B)+ sin(A − B)]
cos A sin B = 12 [sin(A + B)− sin(A − B)]
cos A cos B = 12 [cos(A + B)+ cos(A − B)]
sin A sin B = − 12 [cos(A + B)−cos(A − B)]
Sums or differences of sines and cosinesinto products:
sin x + sin y = 2 sin
(x + y
2
)
cos
(x − y
2
)
sin x − sin y = 2 cos
(x + y
2
)
sin
(x − y
2
)
cos x + cos y = 2 cos
(x + y
2
)
cos
(x − y
2
)
cos x − cos y = −2 sin
(x + y
2
)
sin
(x − y
2
)
For a general sinusoidal functiony=Asin(ωt±α), then:
A = amplitude
ω = angular velocity = 2π f rad/s
2π
ω= periodic time T seconds
ω
2π= frequency, f hertz
α = angle of lead or lag (compared withy = A sinωt)
Cartesian and polar co-ordinates:
If co-ordinate (x, y)=(r,θ) then r =√
x2 + y2 and
θ= tan−1 y
xIf co-ordinate (r,θ)= (x, y) then x =r cosθ andy =r sinθ

Essential formulae 817
The circle:
With reference to Fig. FA3.
Area = πr2 Circumference = 2πr
π radians = 180◦
sr
r
�
Figure FA3
For sector of circle:
s = rθ (θ in rad)
shaded area= 12r2θ (θ in rad)
Equation of a circle, centre at (a, b), radius r :
(x − a)2 + (y − b)2 = r2
Linear and angular velocity:
If v= linear velocity (m/s), s =displacement (m),t = time (s), n =speed of revolution (rev/s),θ=angle (rad), ω=angular velocity (rad/s),r = radius of circle (m) then:
v = s
tω = θ
t= 2πn v = ωr
centripetal force = mv2
r
where m =mass of rotating object.
Graphs
Equations of functions:
Equation of a straight line: y =mx +c
Equation of a parabola: y =ax2 +bx +c
Circle, centre (a, b), radius r:
(x −a)2 +(y −b)2 =r2
Equation of an ellipse, centre at origin, semi-axes a
and b:x2
a2 + y2
b2 =1
Equation of a hyperbola:x2
a2 − y2
b2 =1
Equation of a rectangular hyperbola: xy =c2
Irregular areas:
Trapezoidal rule
Area ≈(
width ofinterval
)[1
2
(first + lastordinates
)
+(
sum of remainingordinates
)]
Mid-ordinate rule
Area ≈(
width ofinterval
)(sum of
mid-ordinates
)
Simpson’s rule
Area ≈ 1
3
(width ofinterval
)[(first + lastordinate
)
+4
(sum of even
ordinates
)
+2
(sum of remaining
odd ordinates
)]
Vector geometry
If a=a1i+a2 j+a3 k and b=b1 i+b2 j+b3 k
a · b = a1b1 + a2b2 + a3b3
|a | =√
a21 + a2
2 + a23 cosθ = a · b
|a| |b|
a × b =∣∣∣∣∣∣
i j ka1 a2 a3b1 b2 b3
∣∣∣∣∣∣
|a × b | =√
[(a · a)(b · b)− (a · b)2]

818 Higher Engineering Mathematics
Complex numbers
z =a + jb=r(cosθ+ j sinθ)=r∠θ=re jθ wherej2 =−1
Modulus r =|z|=√(a2 +b2)
Argument θ=arg z = tan−1 b
a
Addition: (a + jb)+(c+ jd)=(a +c)+ j (b+d)
Subtraction: (a + jb)−(c + jd)=(a −c)+ j (b −d)
Complex equations: If m + jn = p + jq then m = pand n =q
Multiplication: z1 z2 =r1 r2∠(θ1 +θ2)
Division:z1
z2= r1
r2∠(θ1 −θ2)
De Moivre’s theorem:
[r∠θ ]n =rn∠nθ=rn(cosnθ+ j sin nθ)=re jθ
Matrices and determinants
Matrices:
If A =(
a bc d
)
and B =(
e fg h
)
then
A + B =(
a + e b + f
c + g d + h
)
A − B =(
a − e b − f
c − g d − h
)
A × B =(
ae + bg a f + bh
ce + dg cf + dh
)
A−1 = 1
ad − bc
(d −b
−c a
)
If A=
⎛
⎜⎝
a1 b1 c1
a2 b2 c2
a3 b3 c3
⎞
⎟⎠ then A−1 = BT
|A| where
BT = transpose of cofactors of matrix A
Determinants:∣∣∣∣a bc d
∣∣∣∣= ad − bc
∣∣∣∣∣∣
a1 b1 c1a2 b2 c2a3 b3 c3
∣∣∣∣∣∣= a1
∣∣∣∣b2 c2b3 c3
∣∣∣∣− b1
∣∣∣∣a2 c2a3 c3
∣∣∣∣
+ c1
∣∣∣∣a2 b2a3 b3
∣∣∣∣
Differential calculus
Standard derivatives:
y or f (x)dy
dxor f ′(x)
axn anxn−1
sin ax a cosax
cosax −a sin ax
tan ax a sec2 ax
secax a secax tan ax
cosecax −a cosecax cot ax
cot ax −a cosec 2 ax
eax aeax
ln ax1
x
sinh ax a coshax
cosh ax a sinhax
tanhax a sech 2 ax
sech ax −a sech ax tanh ax
cosechax −a cosechax cothax
cothax −a cosech 2ax
sin−1 x
a
1√a2 − x2
sin−1 f (x)f ′(x)
√1 − [ f (x)]2
cos−1 x
a
−1√a2 − x2
Essential formulae 819
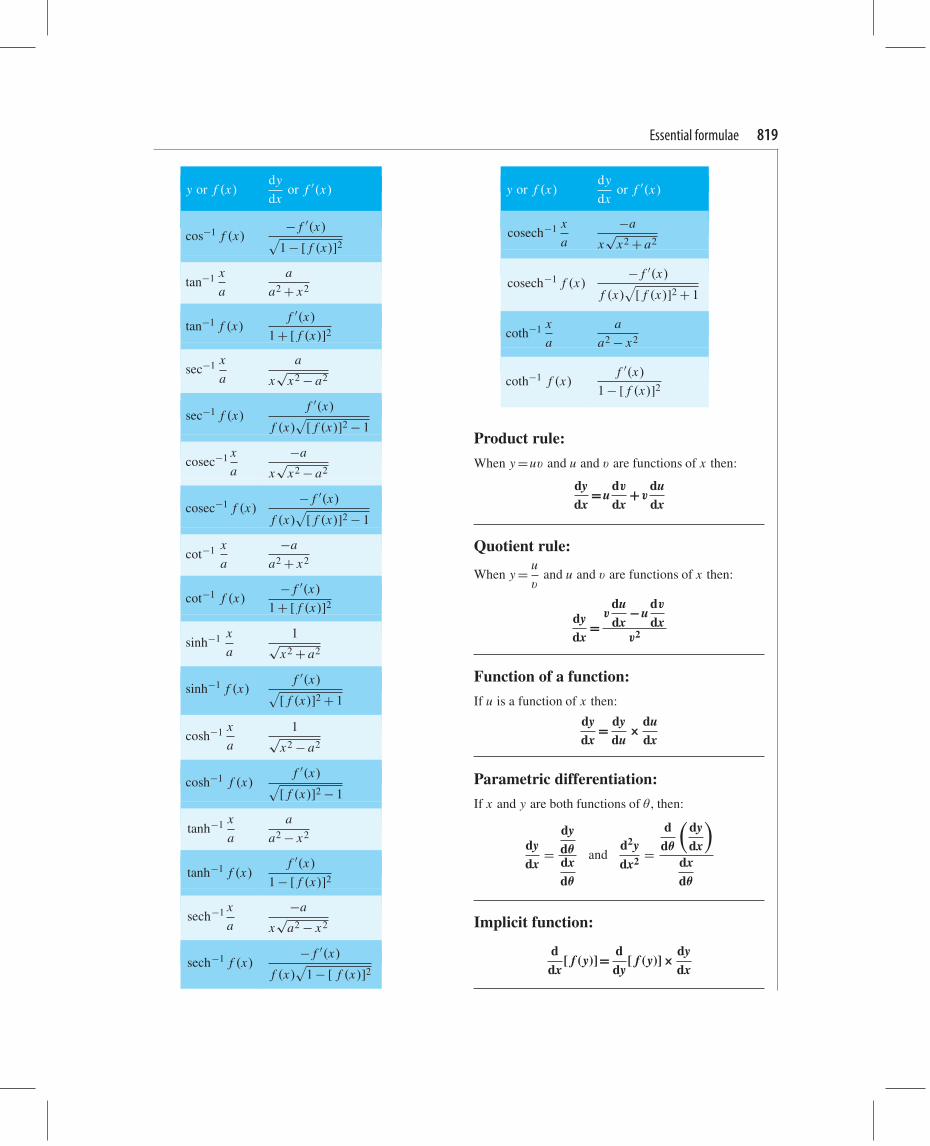
y or f (x)dy
dxor f ′(x)
cos−1 f (x)− f ′(x)
√1 − [ f (x)]2
tan−1 x
a
a
a2 + x2
tan−1 f (x)f ′(x)
1 + [ f (x)]2
sec−1 x
a
a
x√
x2 − a2
sec−1 f (x)f ′(x)
f (x)√
[ f (x)]2 − 1
cosec−1 x
a
−a
x√
x2 − a2
cosec−1 f (x)− f ′(x)
f (x)√
[ f (x)]2 − 1
cot−1 x
a
−a
a2 + x2
cot−1 f (x)− f ′(x)
1 + [ f (x)]2
sinh−1 x
a
1√x2 + a2
sinh−1 f (x)f ′(x)
√[ f (x)]2 + 1
cosh−1 x
a
1√x2 − a2
cosh−1 f (x)f ′(x)
√[ f (x)]2 − 1
tanh−1 x
a
a
a2 − x2
tanh−1 f (x)f ′(x)
1 − [ f (x)]2
sech−1 x
a
−a
x√
a2 − x2
sech−1 f (x)− f ′(x)
f (x)√
1 − [ f (x)]2
y or f (x)dy
dxor f ′(x)
cosech−1 x
a
−a
x√
x2 + a2
cosech−1 f (x)− f ′(x)
f (x)√
[ f (x)]2 + 1
coth−1 x
a
a
a2 − x2
coth−1 f (x)f ′(x)
1 − [ f (x)]2
Product rule:
When y =uv and u and v are functions of x then:
dydx
=udv
dx+v
dudx
Quotient rule:
When y = u
vand u and v are functions of x then:
dydx
=v
dudx
−udv
dxv2
Function of a function:
If u is a function of x then:
dydx
= dydu
× dudx
Parametric differentiation:
If x and y are both functions of θ , then:
dydx
=dydθdxdθ
andd2ydx2 =
ddθ
(dydx
)
dxdθ
Implicit function:
ddx
[ f (y)]= ddy
[ f (y)]× dydx

820 Higher Engineering Mathematics
Maximum and minimum values:
If y = f (x) thendydx
=0 for stationary points.
Let a solution ofdy
dx=0 be x =a; if the value of
d2 y
dx2 when x =a is: positive, the point is a minimum,
negative, the point is a maximum.
Velocity and acceleration:
If distance x = f (t), then
velocity v= f ′(t) ordx
dtand
acceleration a = f ′′(t) ord2x
dt2
Tangents and normals:
Equation of tangent to curve y = f (x) at the point(x1, y1) is:
y − y1 = m(x − x1)
where m =gradient of curve at (x1, y1).
Equation of normal to curve y = f (x) at the point(x1, y1) is:
y − y1 = − 1
m(x − x1)
Partial differentiation:
Total differentialIf z = f (u,v, . . .), then the total differential,
dz = ∂z
∂udu + ∂z
∂vdv + . . . .
Rate of change
If z = f (u,v, . . .) anddu
dt,
dv
dt, … denote the rate of
change of u, v, … respectively, then the rate of changeof z,
dz
dt= ∂z
∂u· du
dt+ ∂z
∂v· dv
dt+ . . .
Small changesIf z = f (u,v, . . .) and δx , δy, … denote small changesin x , y, … respectively, then the corresponding change,
δz ≈ ∂z
∂xδx + ∂z
∂yδy + . . . .
To determine maxima, minima and saddle points forfunctions of two variables: Given z = f (x, y),
(i) determine∂z
∂xand
∂z
∂y
(ii) for stationary points,∂z
∂x=0 and
∂z
∂y=0
(iii) solve the simultaneous equations∂z
∂x=0 and
∂z
∂y=0 for x and y, which gives the co-ordinates
of the stationary points
(iv) determine∂2z
∂x2 ,∂2z
∂y2 and∂2z
∂x∂y
(v) for each of the co-ordinates of the station-ary points, substitute values of x and y into
∂2z
∂x2 ,∂2z
∂y2 and∂2z
∂x∂yand evaluate each
(vi) evaluate
(∂2z
∂x∂y
)2
for each stationary point,
(vii) substitute the values of∂2z
∂x2 ,∂2z
∂y2 and∂2z
∂x∂yinto
the equation �=(∂2z
∂x∂y
)2
−(∂2z
∂x2
)(∂2z
∂y2
)
and evaluate
(viii) (a) if �>0 then the stationary point is a saddlepoint
(b) if �<0 and∂2z∂x2 <0, then the stationary
point is a maximum point, and
(c) if �<0 and∂2z∂x2 >0, then the stationary
point is a minimum point

Essential formulae 821
Integral calculus
Standard integrals:
y∫
y dx
axn axn+1
n + 1+ c
(except where n = −1)
cosax1
asin ax + c
sin ax − 1
acosax + c
sec2 ax1
atan ax + c
cosec2 ax − 1
acot ax + c
cosecax cot ax − 1
acosec ax + c
secax tan ax1
asecax + c
eax 1
aeax + c
1
xln x + c
tan ax1
aln(secax)+ c
cos2 x1
2
(
x + sin 2x
2
)
+ c
sin2 x1
2
(
x − sin 2x
2
)
+ c
tan2 x tan x − x + c
cot2 x −cot x − x + c
1√(a2 − x2)
sin−1 x
a+ c
√(a2 − x2)
a2
2sin−1 x
a+ x
2
√(a2 − x2)+ c
y∫
y dx
1
(a2 + x2)
1
atan−1 x
a+ c
1√(x2 + a2)
sinh−1 x
a+ c or
ln
[x +√(x2 + a2)
a
]
+ c
√(x2 + a2)
a2
2sinh−1 x
a+ x
2
√(x2 + a2)+ c
1√(x2 − a2)
cosh−1 x
a+ c or
ln
[x +√(x2 − a2)
a
]
+ c
√(x2 − a2)
x
2
√(x2 − a2)− a2
1cosh−1 x
a+ c
t= tanθ
2substitution:
To determine∫ 1
a cosθ + b sinθ + cdθ let
sinθ = 2t
(1 + t2)cosθ = 1 − t2
1 + t2 and
dθ = 2 dt
(1 + t2)
Integration by parts:
If u and v are both functions of x then:∫
udv
dxdx=uv−
∫v
dudx
dx
Reduction formulae:∫
xnex dx = In = xnex − nIn−1
∫xn cos x dx = In = xn sin x + nxn−1 cos x
−n(n − 1)In−2
822 Higher Engineering Mathematics
∫ π
0xn cos x dx = In = −nπn−1 − n(n − 1)In−2
∫xn sin x dx = In = −xn cos x + nxn−1 sin x
−n(n − 1)In−2
∫sinn x dx = In = − 1
nsinn−1 x cos x + n − 1
nIn−2
∫cosn x dx = In = 1
ncosn−1 sin x + n − 1
nIn−2
∫ π/2
0sinn x dx =
∫ π/2
0cosn x dx = In = n − 1
nIn−2
∫tann x dx = In = tann−1 x
n − 1− In−2
∫(ln x)n dx = In = x(ln x)n − nIn−1
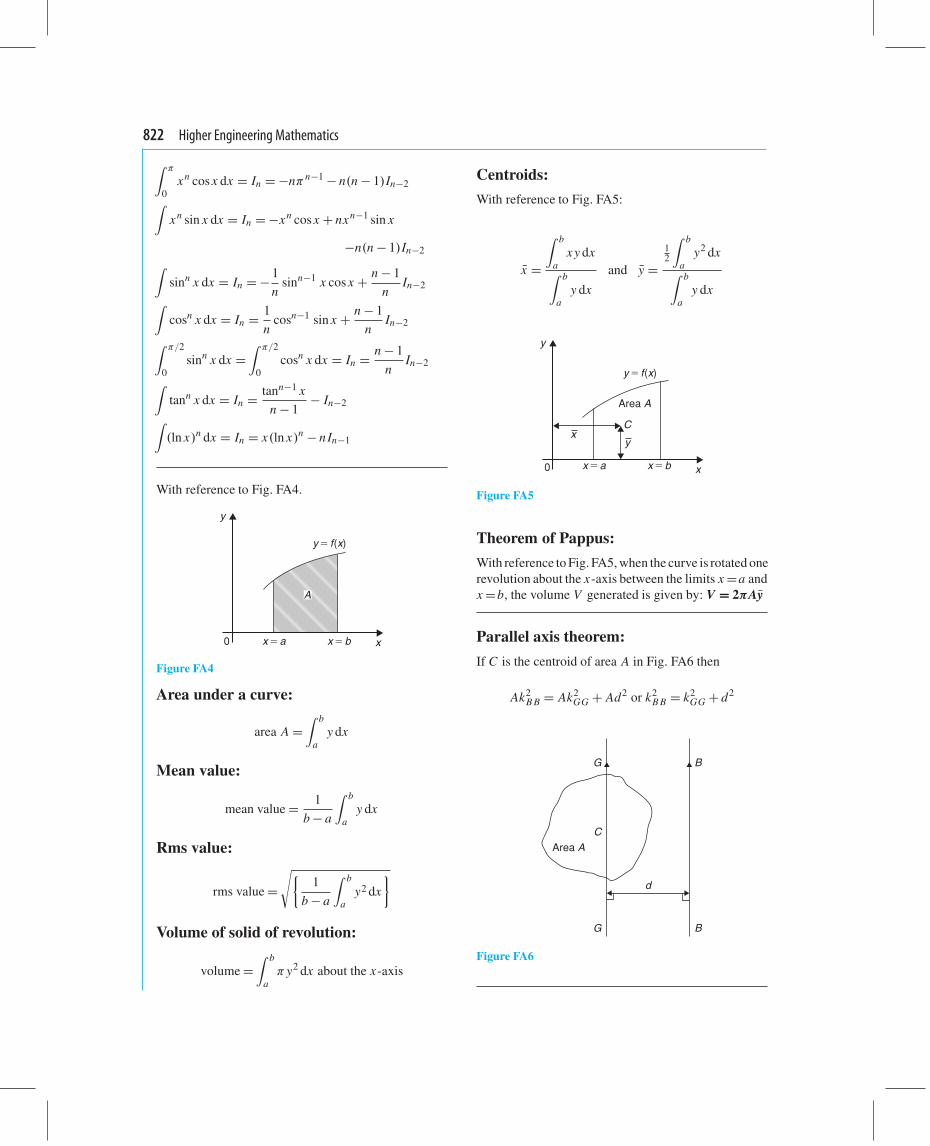
With reference to Fig. FA4.
y
y 5 f(x)
x 5 a x 5 b x0
A
Figure FA4
Area under a curve:
area A =∫ b
ay dx
Mean value:
mean value = 1
b − a
∫ b
ay dx
Rms value:
rms value =√{
1
b − a
∫ b
ay2 dx
}
Volume of solid of revolution:
volume =∫ b
aπy2 dx about the x-axis
Centroids:
With reference to Fig. FA5:
x =
∫ b
axy dx
∫ b
ay dx
and y =12
∫ b
ay2 dx
∫ b
ay dx
y
C
Area A
xy
y 5 f(x)
x 5 a x 5 b x0
Figure FA5
Theorem of Pappus:
With reference to Fig. FA5, when the curve is rotated onerevolution about the x-axis between the limits x =a andx =b, the volume V generated is given by: V = 2πAy
Parallel axis theorem:
If C is the centroid of area A in Fig. FA6 then
Ak2B B = Ak2
GG + Ad2 or k2B B = k2
GG + d2
G B
G B
d
C
Area A
Figure FA6

Essential formulae 823
Second moment of area and radius of gyration:
Shape Position of axis Second moment Radius ofof area, I gyration, k
Rectangle (1) Coinciding with bbl3
3
1√3length l
(2) Coinciding with llb3
3
b√3
breadth b
(3) Through centroid,bl3
12
1√12parallel to b
(4) Through centroid,lb3
12
b√12parallel to l
Triangle (1) Coinciding with bbh3
12
h√6Perpendicular
(2) Through centroid,bh3
36
h√18
height h
parallel to basebase b
(3) Through vertex,bh3
4
h√2parallel to base
Circle (1) Through centre,πr4
2
r√2radius r perpendicular to plane
(i.e. polar axis)
(2) Coinciding with diameterπr4
4
r
2
(3) About a tangent5πr4
4
√5
2r
Semicircle Coinciding withπr4
8
r
2radius r diameter
Perpendicular axis theorem:
If OX and OY lie in the plane of area A in Fig. FA7,
then Ak2O Z = Ak2
O X + Ak2OY or k2
O Z = k2O X + k2
OY
Z
O
Y
X
Area A
Figure FA7
Numerical integration:
Trapezoidal rule
∫ydx ≈
(width ofinterval
)[1
2
(first + last
ordinates
)
+(
sum of remaining
ordinates
)]
Mid-ordinate rule
∫ydx ≈
(width ofinterval
)(sum of
mid-ordinates
)

824 Higher Engineering Mathematics
Simpson’s rule
∫ydx ≈ 1
3
(width ofinterval
)[(first + lastordinate
)
+ 4
(sum of even
ordinates
)
+2
(sum of remaining
odd ordinates
)]
Differential equations
First-order differential equations:
Separation of variables
Ifdy
dx= f (x) then y =
∫f (x)dx
Ifdy
dx= f (y) then
∫dx =
∫dy
f (y)
Ifdy
dx= f (x) · f (y) then
∫dy
f (y)=∫
f (x)dx
Homogeneous equations:
If Pdy
dx= Q, where P and Q are functions of both x and
y of the same degree throughout (i.e. a homogeneousfirst-order differential equation) then:
(i) rearrange Pdy
dx= Q into the form
dy
dx= Q
P
(ii) make the substitution y =vx (where v is a func-tion of x), from which, by the product rule,
dy
dx= v(1)+ x
dv
dx
(iii) substitute for both y anddy
dxin the equation
dy
dx= Q
P
(iv) simplify, by cancelling, and then separate the
variables and solve using thedy
dx= f (x) · f (y)
method
(v) substitute v= y
xto solve in terms of the original
variables.
Linear first-order:
Ifdy
dx+ Py = Q,where P and Q are functions of x
only (i.e. a linear first-order differential equation), then
(i) determine the integrating factor, e∫
P dx
(ii) substitute the integrating factor (I.F.) intothe equation
y (I.F.)=∫(I.F.) Q dx
(iii) determine the integral∫(I.F.)Q dx
Numerical solutions of first-orderdifferential equations:
Euler’s method: y1 = y0 + h(y ′)0Euler–Cauchy method: yP1 = y0 + h(y ′)0
and yC1 = y0 + 1
2h[(y ′)0 + f (x1, yp1)]
Runge–Kutta method:
To solve the differential equationdy
dx= f (x, y) given
the initial condition y = y0 at x = x0 for a range ofvalues of x = x0(h)xn:
1. Identify x0, y0 and h, and values of x1, x2, x3, . . .
2. Evaluate k1 = f (xn, yn) starting with n = 0
3. Evaluate k2 = f
(
xn + h
2, yn + h
2k1
)
4. Evaluate k3 = f
(
xn + h
2, yn + h
2k2
)
5. Evaluate k4 = f(xn + h, yn + hk3)
6. Use the values determined from steps 2 to 5 toevaluate:
yn+1 = yn + h
6{k1 + 2k2 + 2k3 + k4}
7. Repeat steps 2 to 6 for n = 1,2,3, . . .
Second-order differential equations:
If ad2ydx2 + b
dydx
+ cy = 0 (where a, b and c are con-
stants) then:
(i) rewrite the differential equation as(aD2 +bD+c)y =0
(ii) substitute m for D and solve the auxiliary equationam2 +bm +c=0

Essential formulae 825
(iii) if the roots of the auxiliary equation are:(a) real and different, say m =α and m =β
then the general solution is
y = Aeαx + Beβx
(b) real and equal, say m =α twice, then thegeneral solution is
y = (Ax + B)eαx
(c) complex, say m =α± jβ, then the generalsolution is
y = eαx(Acosβx + Bsinβx)
(iv) given boundary conditions, constants A and Bcan be determined and the particular solutionobtained.
If ad2ydx2 + b
dydx
+ cy = f (x) then:
(i) rewrite the differential equation as(aD2 +bD+c)y =0
(ii) substitute m for D and solve the auxiliary equationam2 +bm +c=0
(iii) obtain the complimentary function (C.F.), u, asper (iii) above.
(iv) to find the particular integral, v, first assume aparticular integral which is suggested by f (x),but which contains undetermined coefficients (seeTable 54.1, page 561 for guidance).
(v) substitute the suggested particular integral intothe original differential equation and equaterelevant coefficients to find the constantsintroduced.
(vi) the general solution is given by y =u +v(vii) given boundary conditions, arbitrary constants in
the C.F. can be determined and the particularsolution obtained.
Higher derivatives:
y y(n)
eax an eax
sin ax an sin(
ax + nπ
2
)
y y(n)
cosax an cos(
ax + nπ
2
)
xa a!
(a − n)!xa−n
sinh axan
2
{[1 + (−1)n
]sinh ax
+[1 − (−1)n]
cosh ax}
cosh axan
2
{[1 − (−1)n
]sinh ax
+[1 + (−1)n]
cosh ax}
ln ax (−1)n−1 (n − 1)!
xn
Leibniz’s theorem:
To find the nth derivative of a product y = uv:
y(n) = (uv)(n) = u(n)v + nu(n−1)v(1)
+ n(n − 1)
2!u(n−2)v(2)
+ n(n − 1)(n − 2)
3!u(n−3)v(3)+ ·· ·
Power series solutions of second-orderdifferential equations:
(a) Leibniz–Maclaurin method(i) Differentiate the given equation n times,
using the Leibniz theorem
(ii) rearrange the result to obtain the recurrencerelation at x = 0
(iii) determine the values of the derivatives atx = 0, i.e. find (y)0 and (y ′)0
(iv) substitute in the Maclaurin expansion fory = f (x)
(v) simplify the result where possible and applyboundary condition (if given).
(b) Frobenius method(i) Assume a trial solution of the form:
y = xc{a0 +a1x +a2x2 +a3x3 + ·· · +ar xr + ·· · } a0 = 0

826 Higher Engineering Mathematics
(ii) differentiate the trial series to find y′and y ′′
(iii) substitute the results in the given differentialequation
(iv) equate coefficients of corresponding powersof the variable on each side of the equa-tion: this enables index c and coefficientsa1,a2,a3, . . . from the trial solution, to bedetermined.
Bessel’s equation:
The solution of x2 d2y
dx2 + xdy
dx+ (x2 − v2)y = 0 is:
y = Axv{
1 − x2
22(v + 1)
+ x4
24 × 2! (v + 1)(v+ 2)
− x6
26 × 3! (v + 1)(v + 2)(v + 3)+ ·· ·
}
+ Bx−v{
1 + x2
22(v − 1)+ x4
24 × 2! (v − 1)(v − 2)
+ x6
26 × 3! (v − 1)(v − 2)(v − 3)+ ·· ·
}
or, in terms of Bessel functions and gamma functions:
y = AJv (x)+ B J−v(x)
= A( x
2
)v { 1
(v + 1)− x2
22(1! )(v + 2)
+ x4
24(2! )(v + 4)− ·· ·
}
+ B( x
2
)−v { 1
(1 − v) − x2
22(1! )(2 − v)
+ x4
24(2! )(3 − v) − ·· ·}
In general terms:
Jv (x)=( x
2
)v ∞∑
k=0
(−1)kx2k
22k(k! )(v + k + 1)
and J−v (x)=( x
2
)−v ∞∑
k=0
(−1)kx2k
22k(k! )(k − v + 1)
and in particular:
Jn(x)=( x
2
)n{
1
n!− 1
(n + 1)!
( x
2
)2
+ 1
(2! )(n + 2)!
( x
2
)4 − ·· ·}
J0(x)= 1 − x2
22(1! )2+ x4
24(2! )2
− x6
26(3! )2+ ·· ·
and J1(x)= x
2− x3
23(1! )(2! )+ x5
25(2! )(3! )
− x7
27(3! )(4! )+ ·· ·
Legendre’s equation:
The solution of (1 − x2)d2y
dx2 − 2xdy
dx+ k(k + 1)y = 0
is:
y = a0
{
1 − k(k + 1)
2!x2
+ k(k + 1)(k − 2)(k + 3)
4!x4 − ·· ·
}
+ a1
{
x − (k − 1)(k + 2)
3!x3
+ (k − 1)(k − 3)(k + 2)(k + 4)
5!x5 − ·· ·
}
Rodrigues’ formula:
Pn(x)= 1
2nn!
dn(x2 − 1)n
dxn
Statistics and probability
Mean, median, mode and standarddeviation:
If x =variate and f = frequency then:
mean x =∑
f x∑
f
The median is the middle term of a ranked set of data.

Essential formulae 827
The mode is the most commonly occurring value in aset of data.
Standard deviation:
σ =√√√√[∑{
f (x − x)2}
∑f
]
for a population
Binomial probability distribution:
If n =number in sample, p =probability of the occur-rence of an event and q =1− p, then the probability of0,1,2,3, . . . occurrences is given by:
qn, nqn−1 p,n(n − 1)
2!qn−2 p2,
n(n − 1)(n − 2)
3!qn−3 p3, . . .
(i.e. successive terms of the (q + p)n expansion).
Normal approximation to a binomial distribution:Mean=np Standard deviation σ =√
(npq)
Poisson distribution:
If λ is the expectation of the occurrence of an event thenthe probability of 0,1,2,3, . . . occurrences is given by:
e−λ, λe−λ, λ2 e−λ
2!, λ3 e−λ
3!, . . .
Product-moment formula for the linearcorrelation coefficient:
Coefficient of correlation r =∑
xy√[(∑
x2)(∑
y2)]
where x = X − X and y =Y −Y and (X1,Y1),(X2,Y2), . . . denote a random sample from a bivariatenormal distribution and X and Y are the means of theX and Y values respectively.
Normal probability distribution:
Partial areas under the standardized normal curve — seeTable 61.1 on page 651.
Student’s t distribution:
Percentile values (tp) for Student’s t distribution with νdegrees of freedom – see Table 64.2, page 679, on thewebsite.
Chi-square distribution:
Percentile values (χ2p) for the Chi-square distribution
with ν degrees of freedom–see Table 66.1, page 701, onthe website.
χ2 =∑{(o−e)2
e
}
where o and e are the observed and
expected frequencies.
Symbols:
PopulationNumber of members Np , mean μ, standard deviation σ
SampleNumber of members N , mean x , standard deviation s
Sampling distributionsMean of sampling distribution of means μx
Standard error of means σx
Standard error of the standard deviations σs
Standard error of the means:
Standard error of the means of a sample distribution, i.e.the standard deviation of the means of samples, is:
σx = σ√N
√(Np − N
Np − 1
)
for a finite population and/or for sampling withoutreplacement, and
σx = σ√N
for an infinite population and/or for sampling withreplacement.
The relationship between sample meanand population mean:
μx =μ for all possible samples of size N are drawnfrom a population of size Np
828 Higher Engineering Mathematics
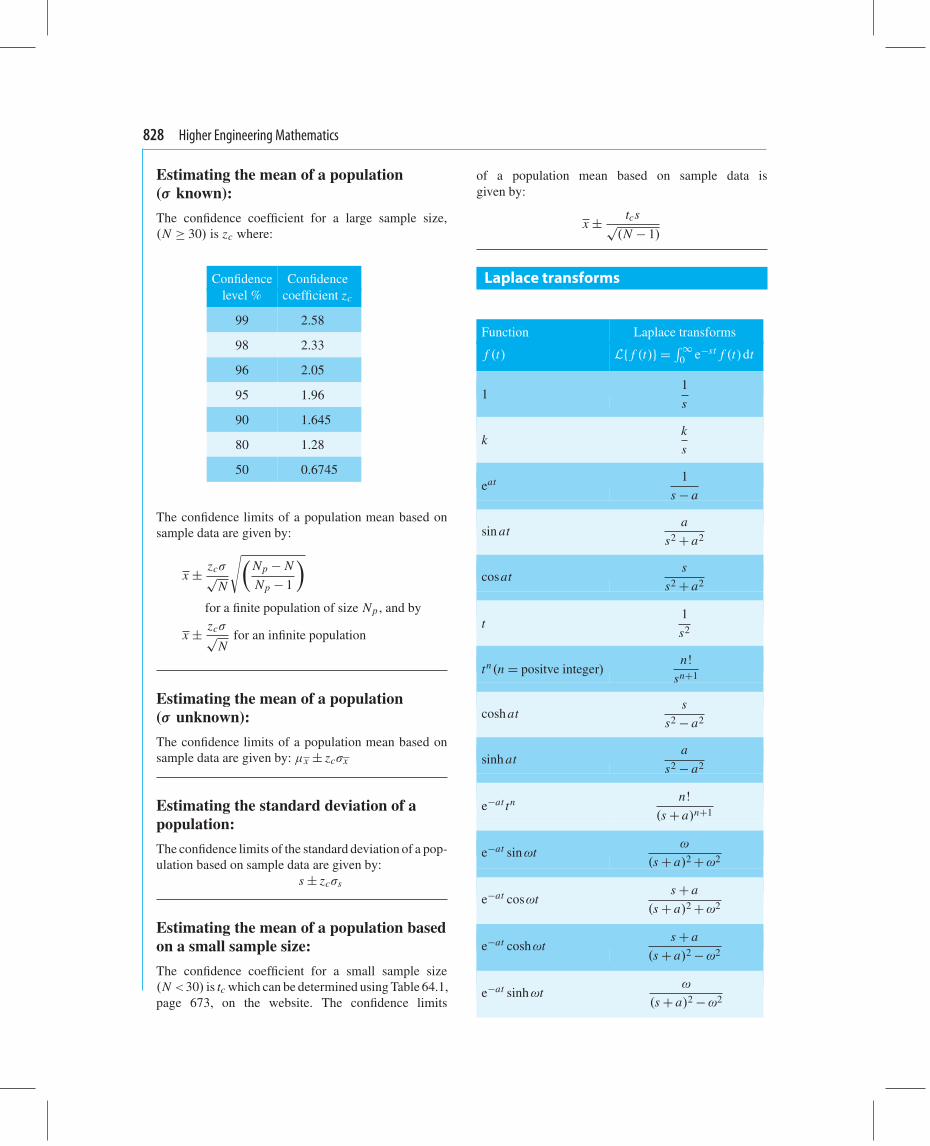
Estimating the mean of a population(σ known):
The confidence coefficient for a large sample size,(N ≥ 30) is zc where:
Confidence Confidencelevel % coefficient zc
99 2.58
98 2.33
96 2.05
95 1.96
90 1.645
80 1.28
50 0.6745
The confidence limits of a population mean based onsample data are given by:
x ± zcσ√N
√(Np − N
Np − 1
)
for a finite population of size Np , and by
x ± zcσ√N
for an infinite population
Estimating the mean of a population(σ unknown):
The confidence limits of a population mean based onsample data are given by: μx ± zcσx
Estimating the standard deviation of apopulation:
The confidence limits of the standard deviation of a pop-ulation based on sample data are given by:
s ± zcσs
Estimating the mean of a population basedon a small sample size:
The confidence coefficient for a small sample size(N<30) is tc which can be determined using Table 64.1,page 673, on the website. The confidence limits
of a population mean based on sample data isgiven by:
x ± tcs√(N − 1)
Laplace transforms
Function Laplace transforms
f (t) L{ f (t)} = ∫∞0 e−st f (t)dt
11
s
kk
s
eat 1
s − a
sin ata
s2 + a2
cosats
s2 + a2
t1
s2
tn(n = positve integer)n!
sn+1
cosh ats
s2 − a2
sinh ata
s2 − a2
e−at tn n!
(s + a)n+1
e−at sinωtω
(s + a)2 +ω2
e−at cosωts + a
(s + a)2 +ω2
e−at coshωts + a
(s + a)2 −ω2
e−at sinhωtω
(s + a)2 −ω2

Essential formulae 829
The Laplace transforms of derivatives:
First derivative
L{
dydx
}
= sL{y} − y(0)
where y(0) is the value of y at x = 0
Second derivative
L{
dydx
}
= s2L{y} − sy(0)− y′(0)
where y′(0) is the value ofdy
dxat x = 0
Fourier series
If f (x) is a periodic function of period 2π then itsFourier series is given by:
f (x)= a0 +∞∑
n=1
(an cosnx + bn sin nx)
where, for the range −π to +π :
a0 = 1
2π
∫ π
−πf (x)dx
an = 1
π
∫ π
−πf (x)cosnx dx (n = 1,2,3, . . .)
bn = 1
π
∫ π
−πf (x)sin nx dx (n = 1,2,3, . . .)
If f (x) is a periodic function of period L then its Fourierseries is given by:
f (x)= a0 +∞∑
n=1
{an cos
(2πnx
L
)+ bn sin
( 2πnxL
)}
where for the range − L
2to + L
2:
a0 = 1
L
∫ L/2
−L/2f (x)dx
an = 2L
∫ L/2
−L/2f (x)cos
( 2πnxL
)dx (n = 1,2,3, . . .)
bn = 2L
∫ L/2
−L/2f (x)sin
( 2πnxL
)dx (n = 1,2,3, . . .)
Complex or exponential Fourier series:
f (x)=∞∑
n=−∞cne j 2πnx
L
where cn = 1
L
∫ L2
− L2
f (x)e− j 2πnxL dx
For even symmetry,
cn = 2
L
∫ L2
0f (x)cos
( 2πnxL
)dx
For odd symmetry,
cn = − j2
L
∫ L2
0f (x)sin
( 2πnxL
)dx
These formulae are available for downloading at the website:www.routledge.com/cw/bird


















