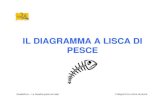
Esercizio sulle forze d’inerzia per moti circolari · disegnare il diagramma preliminare di corpo...
51
Tecnica delle costruzioni meccaniche Matteo Bertoneri Sintesi della lezione del 09/10/06 (2h) • Esercizio sulle forze d’inerzia per moti circolari Una pallina di massa 30g ruota su un piano orizzontale liscio, mantenendo sempre il filo teso, a velocità in modulo costante . Tracciare il diagramma di corpo libero della pallina il più preciso possibile. v Risoluzione in un sistema di riferimento solidale al tavolo: La prima cosa da fare è il calcolo dei carichi, cioè di quelle forze note a priori che prescindono da considerazioni fisiche sul corpo e sul suo moto. y N s m kg 29 . 0 81 . 9 2 3 ≅ ⋅ − g m P 10 30 ⋅ = = Inoltre bisogna caratterizzare le reazioni vincolari: tra la palla e il filo c’è un’interazione elettromagnetica ( così come tra la palla ed il tavolo ) fp F ) ( tp F . Di queste due forze per ora non sappiamo nulla, se non che esse sono due generiche forze e che per la loro determinazione, semplificando il problema in un problema piano, occorrono quattro grandezze scalari. In realtà queste non sono le uniche forze fisiche che agiscono sul corpo, in quanto sono presenti la resistenza dell’aria e la spinta archimedea. Tuttavia se si va a considerare la scarsa intensità di queste due forze (dovuta per la resistenza dell’aria alla bassa velocità tangenziale della palla, mentre per la spinta d’Archimede al fatto che la densità dell’aria è molto piccola) si capisce come esse possano essere trascurate nell’analisi di questo problema. A questo punto si può disegnare il diagramma preliminare di corpo libero, nel quale bisogna riportare solo l’oggetto in questione, per distinguere dove sono applicate le forze. Introdotto un sistema cartesiano ortonormale destrogiro si può utilizzare il secondo principio di Newton ed iniziare la fase delle considerazioni fisiche per arrivare allo scopo di caratterizzare le forze incognite e tracciare quindi il diagramma finale di corpo libero. Poiché il corpo descrive una traiettoria circolare a velocità tangenziale uniforme, la sua accelerazione non può che essere centripeta. ⎟ ⎟ ⎠ 0 ⎞ ⎜ ⎜ ⎝ ⎛ = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − − 29 , 0 0 R v m D C B A 2 Qui abbiamo 4 incognite con 2 equazioni. Pertanto, con queste considerazioni fisiche, si deve concludere che il problema è indeterminato , poiché esistono 2 ∞ soluzioni possibili. Quando verranno introdotte le nozioni di “filo ideale” e “piano liscio”, allora resteranno due sole incognite, giungendo ad una soluzione univoca del problema. Risoluzione in un sistema di riferimento non inerziale solidale alla palla: Il sistema di riferimento scelto è in moto rototraslatorio circolare uniforme rispetto alla stelle fisse, e dunque non è inerziale. Il procedimento risolutivo del problema non cambia: calcolo dei carichi, caratterizzazione delle reazioni vincolari, diagramma preliminare di corpo libero, considerazioni fisiche, diagramma definitivo di corpo libero. Tuttavia, già dal primo punto bisogna considerare che il sistema scelto è non inerziale, e dunque, per utilizzare il secondo principio di Newton, bisogna introdurre le Forze d’inerzia, che sono dei carichi. In particolare, introducendo la forza centrifuga e notando come l’accelerazione relativa del corpo sia nulla, si giunge ad un’equazione equivalente a quella indeterminata a cui portava il procedimento inerziale. N 29 , 0 tp F fp F ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − = D C F B A F P fp tp 29 , 0 0 x R z y x z
Transcript of Esercizio sulle forze d’inerzia per moti circolari · disegnare il diagramma preliminare di corpo...

Tecnica delle costruzioni meccaniche Matteo Bertoneri Sintesi della lezione del 09/10/06 (2h)
• Esercizio sulle forze d’inerzia per moti circolari
Una pallina di massa 30g ruota su un piano orizzontale liscio, mantenendo sempre il filo teso, a velocità in modulo costante . Tracciare il diagramma di corpo libero della pallina il più preciso possibile. v Risoluzione in un sistema di riferimento solidale al tavolo:
La prima cosa da fare è il calcolo dei carichi, cioè di quelle forze note a priori che prescindono da considerazioni fisiche sul corpo e sul suo moto.
y
Nsmkg 29.081.9 2
3 ≅⋅−gmP 1030 ⋅==
Inoltre bisogna caratterizzare le reazioni vincolari: tra la palla e il filo c’è un’interazione elettromagnetica ( così come tra la palla ed il tavolo )fpF )( tpF . Di queste due forze per ora non sappiamo nulla, se non che esse sono due generiche forze e che per la loro determinazione, semplificando il problema in un problema piano, occorrono quattro grandezze scalari. In realtà queste non sono le uniche forze fisiche che agiscono sul corpo, in quanto sono presenti la
resistenza dell’aria e la spinta archimedea. Tuttavia se si va a considerare la scarsa intensità di queste due forze (dovuta per la resistenza dell’aria alla bassa velocità tangenziale della palla, mentre per la spinta d’Archimede al fatto che la densità dell’aria è molto piccola) si capisce come esse possano essere trascurate nell’analisi di questo problema. A questo punto si può disegnare il diagramma preliminare di corpo libero, nel quale bisogna riportare solo l’oggetto in questione, per distinguere dove sono
applicate le forze. Introdotto un sistema cartesiano ortonormale destrogiro si può utilizzare il secondo principio di Newton ed iniziare la fase delle considerazioni fisiche per arrivare allo scopo di caratterizzare le forze incognite e tracciare quindi il diagramma finale di corpo libero. Poiché il corpo descrive una traiettoria circolare a velocità tangenziale uniforme, la sua accelerazione non può che essere centripeta.
⎟⎟⎠0⎞
⎜⎜⎝
⎛=⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛−
−
29,00 R
v
mDC
BA 2
Qui abbiamo 4 incognite con 2 equazioni. Pertanto, con queste considerazioni fisiche, si deve concludere che il problema è indeterminato, poiché esistono 2∞ soluzioni possibili. Quando verranno introdotte le nozioni di “filo ideale” e “piano liscio”, allora resteranno due sole incognite, giungendo ad una soluzione univoca del problema.
Risoluzione in un sistema di riferimento non inerziale solidale alla palla:
Il sistema di riferimento scelto è in moto rototraslatorio circolare uniforme rispetto alla stelle fisse, e dunque non è inerziale. Il procedimento risolutivo del problema non cambia: calcolo dei carichi, caratterizzazione delle reazioni vincolari, diagramma preliminare di corpo libero, considerazioni fisiche, diagramma
definitivo di corpo libero. Tuttavia, già dal primo punto bisogna considerare che il sistema scelto è non inerziale, e dunque, per utilizzare il secondo principio di Newton, bisogna introdurre le Forze d’inerzia, che sono dei carichi. In particolare, introducendo la forza centrifuga e notando come l’accelerazione relativa del corpo sia nulla, si giunge ad un’equazione equivalente a quella indeterminata a cui portava il procedimento inerziale.
N29,0
tpF
fpF
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎟⎟⎠
⎞⎜⎜⎝
⎛−
=
DC
F
BA
F
P
fp
tp
29,00
x R z
y x
z

• Definizione statica di Forza
La definizione dinamica di Forza non è l’unica possibile: sfruttando il fatto che un corpo soggetto ad una forza modifica la sua forma (effetto che si riscontra soprattutto per le forze di natura elettromagnetica) è possibile dare una definizione statica della Forza. Per esempio, si prende cilindro di gomma ( mmhmm 40,50 =φ ) lo si appoggia su un tavolo e sopra vi si posa un cubo di acciaio ( mml 150= ) avendo cura che il centro di una faccia del cubo stia sull’asse del cilindro. Quando “lascio” il cubo si manifesta un fenomeno oscillatorio smorzato e si rileva sperimentalmente che il cilindro di gomma ha cambiato forma. Servendosi di un calibro è possibile misurare la variazione di forma del cilindro. Per capire cosa sia successo si può fare il diagramma di corpo libero quando tutto è fermo. Prima di ciò bisogna notare che
bcF può essere ricavata “a priori”: applicando il secondo principio
al blocco si ricava bcb PF −= ( )bcbbc PFF =−=, poi per il terzo principio .
Dopo che è stata ricavata a a priori, bcF può essere considerata un carico per il cilindro.
Nsm
dmkgdmgVgmF acciaobbbc 25881.98.75.1 23
33 ≅⋅⋅=== γ
tcFTrascurando il peso del cilindro, si può ricavare dal secondo principio , cioè la forza di contatto che il tavolo esercita sul cilindro. Si ottiene il diagramma di corpo libero definitivo, dal quale si vede come le due forze costituiscano una coppia di braccio nullo. Posso così concludere che è l’azione di questa coppia di braccio nullo ad aver provocato la deformazione del corpo. Se poi costruisco per taratura un grafico che mette in relazione l’intensità comune della coppia con la distorsione del corpo, ottengo una curva caratteristica dell’oggetto. Pertanto attraverso variazioni geometriche si riesce a calcolare la forza applicata. Questa è una definizione statica di forza perché non si è misurato nessuna proprietà cinematica. Inoltre è una definizione operativa perché non si è detto “cos’è” la Forza, ma si è stabilito “come si fa a misurarla”. Infine, il cilindretto di gomma costituisce un dinamometro, poiché si fa attraversare dall’interazione che si vuole misurare.
258 N 258 N
• Il dinamometro ideale
Il dinamometro ideale è un dispositivo schematizzabile come una molla, priva di dimensioni, che si lascia attraversare dalle forze che misura solo in senso parallelo all’asse, mentre se agiscono forze non parallele all’asse il dinamometro ideale le trasmette ma non le misura. L’uso del dinamometro ideale permette di dimostrare sia l’equivalenza tra la definizione statica di Forza e quella dinamica sia la natura vettoriale delle Forze. I dinamometri reali o “celle di carico” (load cell) sono costituiti in maniera diversa, comunque si fanno attraversare dall’interazione che vogliono misurare, c’è un elemento che si deforma, poi un trasduttore trasforma le deformazioni in differenze di potenziale le quali, con un’ opportuna taratura, permettono di misurare l’intensità della Forza.
MISURA
La lezione si è conclusa con alcune considerazioni sulla bilancia pesa-persone e sulla definizione dei sistemi di riferimento cartesiani ortonormali nello spazio euclideo.
NON MISURA

Tecnica delle costruzioni meccaniche Jacopo Fantoni Sintesi della lezione del 11/10/2006 (2 h)
In questa lezione abbiamo introdotto la definizione di vettore, dato che la forza, una delle prime grandezze fisiche di cui ci siamo occupati, è proprio un vettore. Un vettore è definito da un modulo (o intensità), da una direzione, quello della sua retta d’azione, e da un verso. Abbiamo quindi illustrato le notazioni con cui è possibile scrivere un vettore:
• Notazione sintetica F
• Notazione cartesiana kFjFiFF zyxˆˆˆ ++=
• Notazione matriciale ( )Tzyx
z
y
x
FFF
F
FF
F =⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
=
E’ evidente come la notazione sintetica sia abbastanza riduttiva, mentre molto più operativa è la notazione cartesiana: in essa infatti possiamo distinguere una parte scalare (Fx) da una vettoriale ( i ) per ognuna delle tre componenti spaziali. Naturalmente sia la notazione cartesiana che quella matriciale, comoda per i calcoli, sono utilizzabili previa definizione di un sistema di riferimento nello spazio. Noi utilizziamo un riferimento cartesiano ortonormale, definito cioè da tre versori di modulo unitario perpendicolari fra loro, e destrogiro, cioè in particolare il verso del versore k è determinato in maniera che esso veda il versore i sovrapporsi al versore ruotando di 90° in senso antiorario.
ˆ
ˆˆ j
Operazioni fra vettori Si definisce somma algebrica di più vettori un vettore che ha per componenti la somma algebrica delle componenti di ugual posto dei vettori addendi. Nella somma rientra anche l’operazione di differenza, a patto di definire il vettore opposto, un vettore con stessa direzione e modulo, ma verso opposto. Questa operazione richiede che i vettori siano omogenei. Tale definizione è appropriata visto che concorda anche con la nota regola grafica del parallelogramma, che consiste nel costruire il parallelogramma che ha per lati i 2 vettori e nel tracciare la diagonale maggiore come risultato della somma, quella minore per la differenza.
kRFjRFiRFRF zzyyxxˆ)(ˆ)(ˆ)( +++++=+
Il prodotto scalare tra due vettori (anche non omogenei) è uno scalare che ha per modulo il prodotto fra i moduli dei due vettori moltiplicato per il coseno dell’angolo 0 θ π≤ ≤ compreso fra le loro rette d’azione. Si definisce modulo di un vettore:
2 2 2x y zF F F F= + +
cosF R F R θ⋅ =
Algebricamente il prodotto scalare si riduce alla somma dei prodotti fra le componenti di ugual posto, dato che, come è evidente dalla formula geometrica, i prodotti scalari fra versori omonimi e quindi paralleli sono unitari, mentre quelli fra versori diversi e quindi perpendicolari danno contributo nullo. E’ per questo che è possibile ridurre il prodotto scalare a un prodotto tra una matrice riga (primo vettore) e una matrice colonna (secondo vettore). Questa operazione gode sia della proprietà commutativa sia di quella distributiva.

L’ultima operazione trattata è il prodotto vettoriale fra 2 vettori. Esso si definisce come un vettore che ha:
• Modulo: F R F R senθ∧ = con 0 θ π≤ ≤
• Direzione normale al piano di giacitura dei vettori F e R • Verso dato dalla regola della mano destra: mettiamo le dita nella direzione del primo vettore
e le facciamo ruotare sul secondo, mentre il pollice indica il verso del vettore prodotto. Come è evidente dalla definizione geometrica i prodotti vettoriali fra versori uguali danno contributi nulli, mentre quelli fra 2 versori diversi danno il terzo versore con segno indicato dalla regola della mano destra. Per quanto detto è facile verificare che il prodotto vettoriale è ottenibile sviluppando il determinante di questa matrice:
det x y z
x y z
i j kF R F F F
R R R
⎛ ⎞⎜ ⎟
∧ = ⎜ ⎟⎜ ⎟⎝ ⎠
Normalizzare un vettore significa trovare un versore, vettore unitario e dimensionale, con direzione e verso del vettore da normalizzare. Moltiplicando quindi un vettore scalarmente per un versore troviamo la componente del vettore secondo la direzione del versore, ovvero il suo coseno direttore:
cosx FiF i F θ⋅ = =
∑ ∑’ Le grandezze vettoriali non sono invarianti per rotazione, quindi se gli assi di ∑’ non sonno paralleli a quelli di ∑, ho bisogno di una matrice 3×3 che mi permetta di scrivere i nuovi versori rispetto alle vecchie coordinate. Questa matrice L gode della seguente proprietà: LT=L-1.
11 12 13
21 22 23L l l l= ⎜ ⎟⎜ ⎟
31 32 33
l l l
l l l
⎛ ⎞⎜ ⎟
⎝ ⎠
Quindi ho che . ' TF F L= Abbiamo infine definito il lavoro di una forza F lungo una traiettoria curvilinea Γ come uno
scalare pari a: con L F dΓ
= ⋅∫ Γ( ) ( )( ) ( )
( ) ( )
x
y
z
x fy f
z f
λ λλ λ
λ λ
⎧ =⎪Γ = =⎨⎪ =⎩
. Quello appena scritto è un integrale di linea
non risolvibile se non lo si trasforma in un normale integrale di Riemann, operando le seguenti sostituzioni:
( )
( )
( )
x
y
z
dfd
dfd d
ddf
d
λλλ
λλλλ
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟Γ = ⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
( )( )
( )
x
y
z
FF F
F
λλ
λ
⎛ ⎞⎜
= ⎜⎜ ⎟⎝ ⎠
⎟⎟
2
1
( )
( )( ( ), ( ), ( ))
( )
x
yx y z
z
dfd
dfL F F F d
ddf
d
λ
λ
λλλ
λ λ λλλλ
⎛ ⎞⎜ ⎟⎜ ⎟⎜ ⎟= ⎜ ⎟⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
∫ λ

Tecnica delle costruzioni meccaniche Mario Milazzo Sintesi della lezione del 12/10/2006 (1h)
Il Lavoro e l’Energia Potenziale.
Nella scorsa lezione si era definito il Lavoro L di una forza come ∫Γ ⋅= sdFL ovvero un integrale di linea che può essere risolto
solo se calcolato dopo una opportuna riduzione come . Il Lavoro va sempre calcolato in questo modo salvo
casi particolari che vanno esaminati singolarmente. Talvolta però a causa di esigenze prettamente pratiche occorre una valutazione numerica di questa grandezza ed allora si procede per la via numerica che consiste nel dividere in “n” par i la linea (con
∫=2
1
)(λ
λ
λλ dfL
t ∞<n in
modo comunque di ottenere la precisione voluta) e si procede con una sommatoria degli “n” lavori. Se però è conservativa, o meglio il campo di forze è conservativo,
F0=ΓL Γ∀ chiusa. Sempre per tali forze, presi due generici punti O e A nello spazio e
calcolato il lavoro ,scegliendo un qualsiasi percorso grazie alla natura del campo, si definisce l’AO → Energia Potenziale in A:
dove LU A −=
O
Γ A
• è una quantità che dipende solo da O e A AU• Il segno meno è puramente convenzionale
In generale UUUL BA Δ−=−=
Se non è conservativa invece occorre procedere nel calcolo del Lavoro con un’integrazione. F
Teorema dell’Energia Cinetica
TH. Preso un punto generico nello spazio su cui agiscono delle forze (conservative e non) ed il corpo si muove da lungo un qualsiasi percorso, calcolato il Lavoro (indifferentemente) come:
BA→
1. Il Lavoro della forza lungo ∑=
=n
iiFR
1
Γ
2. La somma dei lavori delle singole forze (possibile grazie alle proprietà del prodotto scalare)
Si dimostra che KL Δ= . Il Lavoro quindi è associato alla cinetica dei corpi secondo la relazione precedente che ha valore generale e non è influenzata dalla natura delle forze.
00 >Δ⇒> KL tKL cos0 =⇒= 00 <Δ⇒< KL
Inoltre, se le forze sono tutte conservative UL Δ−= e quindi la relazione diventa: e dunque
che rappresenta il Principio di conservazione dell’Energia Meccanica. KU Δ=Δ−
0)( =+Δ=Δ+Δ KUKUOvviamente se le forze non sono conservative 0≠Δ+Δ KU ed occorre inserire altri termini nell’equazione introducendo il I Principio della Termodinamica per far tornare l’uguaglianza a zero. Spostamento e Lavoro Virtuale Uno spostamento è definito virtuale ( sδ ) quando le forze che agiscono sul punto possono essere considerate costanti parallele ed equiverse mentre il punto subisce lo spostamento. È importante sottolineare come uno spostamento virtuale può essere finito e deve essere infinitesimo solo quando le forze sono variabili con la configurazione.
Il Lavoro virtuale è definito come sFL δδ ⋅= che diventa infinitesimo solo se sds →δ Potenza
La potenza è definita come dtdLW = con
][][
][][][
sJ
smNW =⋅
= oppure ][][
][][][
smJ
smmNmW =⋅
=
Si dimostra altresì facilmente che vFW ⋅=

Tecnica delle costruzioni meccaniche Stefano Baldi Sintesi della lezione del 16/10/2006 (2h)
Per risolvere i problemi le unità di misura delle grandezze devono essere quelle inserite nel sistema internazionale cioè il chilogrammo per la massa, il Newton per la forza i secondi per il tempo e il metro per le lunghezze. L’unità di misura usata nel disegno meccanico per la lunghezza è però il millimetro e questo porta a trovare le grandezze derivate per esempio la potenza e la pressione rispettivamente in milliWatt (mW) e in MegaPascal (MPa). I numeri di cui noi siamo in possesso possono essere ottenuti da un conteggio, da leggi matematiche o da conversione di unità di misura (numeri esatti) oppure da misure o da elaborazioni di misure (valori incerti o approssimati). Il miglior modo di esprimere le grandezze è utilizzare la notazione scientifica, cioè prendere il numero decimale compreso tra 1 e 10 e moltiplicarlo per un’opportuna potenza del 10. In questa notazione le cifre significative sono date dalla cifra dell’unità più le cifre decimali, l’ultima delle quali è una stima dell’incertezza. La misura 3.52·103 Kg ad esempio è compresa tra 3.515·103 Kg e 3.525·103Kg ed è composta da tre cifre significative. Tale quantità ha una incertezza assoluta di 0.01·103 Kg=10kg. L’incertezza relativa è invece: (0.01·103 / 3.52·103 ) pari a una unità su 352.. Generalmente a noi servirà scegliere il numero di cifre significative in modo da garantire una precisione relativa di qualche unità per cento e per questo nei calcoli utilizzeremo generalmente 3 cifre significative. Se la misura inizia con la cifra 1 utilizziamo 4 cifre significative per non avere un errore troppo grande. Criterio di massima per scegliere il numero di cifre significative del risultato: per una somma algebrica il risultato deve avere la precisione assoluta della misura che ha la precisione assoluta peggiore, per una moltiplicazione o una divisione il risultato deve avere lo stesso numero di cifre significative della misura con il minor numero di cifre significative. Non è generalmente vero che un numero maggiore di cifre significative nel risultato sia indice di una maggiore qualità. Statica del punto materiale La statica studia lo stato di equilibrio o di quiete dei corpi Per i corpi in movimento faremo l’analisi considerando sistemi di riferimento non inerziali (introducendo le forze apparenti) in modo da risolvere un problema di dinamica con le formule della statica. Nella trattazione dei primi argomenti useremo il punto materiale. Definiamo il punto materiale come un punto geometrico del quale consideriamo solo la posizione e la massa e trascuriamo le dimensioni perché sono piccole rispetto al fenomeno che consideriamo. Il punto materiale può essere considerato il modello più semplice di corpo. Ogni modello deve avere le seguenti caratteristiche: coerenza fisica, coerenza formale, semplicità, efficacia, efficienza che si traducono in un rispetto dei principi fondamentali della fisica, delle leggi di conservazione e della matematica. Anche un oggetto con estensione e forma può diventare un punto materiale se tali caratteristiche non producono effetti significativi sulla soluzione. Per esempio, nello studio del moto della terra rispetto al sole, la terra e il sole possono essere approssimati a due punti materiali dato che le loro dimensioni sono irrilevanti rispetto alla distanza che li separa

Un punto materiale è in quiete quando è fermo rispetto a un osservatore cioè quando la velocità relativa rispetto è zero per un intervallo di tempo t finito anche se piccolo. L’intervallo deve essere finito in modo che (escludendo al più gli estremi) anche l’accelerazione relativa sia zero. Analizziamo gli effetti prodotti da più forze su un punto materiale. Consideriamo un anellino di massa nota e sottoponiamolo a una serie di forze mediante cavi a cui sono attaccate delle masse per mezzo di pulegge. Modificando il numero dei cavi e la loro disposizione, posso realizzare una forma generica applicata al punto materiale. Per analizzare il sistema dobbiamo introdurre un modello fisico per i fili e le pulegge in quanto essi non sono punti materiali. Dagli esperimenti deduciamo che un filo fissato a un estremo è in equilibrio quando è teso cioè diventa rettilineo. La forza che si applica al cavo per tenderlo ha la direzione del cavo stesso. Possiamo verificare questo fatto sperimentalmente fissando il cavo ad un estremo e inserendo un dinamometro a tre assi per misurare la forza che su di esso viene esercitata dalla mano. Se interponiamo il dinamometro in un punto qualunque (tagliando il filo e fissandone gli estremi ai lati del dinamometro), misuriamo l’interazione trasmessa tra le varie parti. Si verifica che il valore misurato dal dinamometro è lo stesso ed è uguale al valore misurato alle estremità del filo stesso. Un cavo quindi trasmette inalterata la forza tra i suoi estremi. Questa forza è chiamata tiro del cavo.

Tecnica delle costruzioni meccaniche Marco Di Russo Sintesi della lezione del 18/10/06 (2h)
Ritornando al nostro esperimento riguardante l’equilibrio, abbiamo un sistema di N masse collegate attraverso dei fili ad un anellino, che rappresenta il corpo di cui stiamo studiando l’equilibrio; i fili passano attraverso delle pulegge fisse in modo tale che le masse siano sospese in verticale. Abbiamo quindi introdotto degli oggetti fisici “nuovi”: il filo (cable) e la puleggia (pulley); essi non possono essere considerati punti materiali in quanto le loro dimensioni e forme sono significative per una corretta interpretazione del loro comportamento. Per questo servirà creare un modello valido per i fili e per le pulegge. Per quanto riguarda i fili, è possibile studiare il loro comportamento attraverso un semplice esperimento: prendo un filo e attacco un suo estremo ad una parete poi applico una forza con la mano all’altro capo del filo, interponendo però tra la mia mano e il filo un dinamometro (in realtà 3 dinamometri orientati su 3 assi di riferimento per consentire la misura della forza indipendentemente dalla sua direzione); se mi metto nelle condizioni di rimanere fermo mi accorgerò che:
- il filo diventa rettilineo; - i dinamometri mostrano che sto esercitando una forza che ha la direzione del filo e quindi mi
basta un solo dinamometro avente la stessa direzione del filo; - non posso spingere il filo ma solo tirare; - se metto un altro dinamometro tra il filo e la parete, esso segnerà una forza avente le stesse
caratteristiche della forza rilevata dal dinamometro presente tra la mano e il filo (stesso modulo e direzione del filo);
- se taglio il filo unendo i due capi con un altro dinamometro, questo segna nuovamente le stesse caratteristiche della forza.
Si può pertanto concludere, in base a tali evidenze sperimentali, che il filo permette di trasmettere alla parete la forza (esercitata nel nostro caso dalla mano), la cui intensità rimane inalterata dalla mano fino alla parete, cioè tra due punti anche lontani. A tale forza che rimane inalterata daremo il nome di tiro del filo. La forza si trasmette tra ogni punto del filo e la sua direzione è sempre uguale a quella del filo teso. A questo punto introduciamo il nostro modello fisico del filo ideale, un oggetto monodimensionale, privo di massa, perfettamente in estensibile (lunghezza indipendente dal tiro) e perfettamente flessibile (non richiede alcuna forza significativa per incurvarlo). Le pulegge sono elementi che permettono al filo di cambiare l’orientamento del suo asse senza variarne il tiro, nel caso del modello fisico di puleggia ideale; in realtà per rispondere a tale proprietà la puleggia dovrebbe essere priva di massa e avere attriti nulli sul perno, caso solo ideale che non può esistere realmente ma a cui possiamo comunque avvicinarci (uso cuscinetti di rotolamento, lubrificanti …). Ritornando all’esperimento sull’equilibrio, una volta posto l’anello sotto l’azione delle forze agenti, dopo un primo moto oscillatorio nello spazio, potrà accadere che l’Energia cinetica sia dissipata attraverso l’azione di forze non conservative (vari attriti), e l’anello sia in quiete. A questo punto concentro la mia attenzione sull’anellino, considerato corpo puntiforme, del quale traccio lo schema di corpo libero in cui, oltre al peso, devo tenere conto delle forze applicate con i fili. I tiri li posso ottenere facendo schemi di corpo libero relativi alle N masse, considerandole anch’esse puntiformi; ottengo così i valori dei tiri dei vari fili; le direzioni e il verso di tali forze sono note, poiché sto

applicando il modello fisico del filo ideale. Alla fine di tutto scopro che, quando il corpo è in quiete, la somma di tutte le forze su di esso agenti è uguale al vettore nullo. La somma di tutte le forze agenti sul corpo la chiameremo Risultante. Abbiamo la
0=R I Equazione cardinale della statica: Siamo quindi arrivati alla conclusione che se il corpo è in quiete dovrà essere verificata la I eq. Cardinale della statica. Siamo quindi in possesso di uno dei primi strumenti necessari per la risoluzione di qualsiasi problema di statica: se sappiamo che il corpo preso in esame si trova in una condizione di equilibrio rispetto a un qualsiasi tipo di sistema di riferimento, allora possiamo applicare la prima cardinale. A questo punto è però utile definire un procedimento standard che, attraverso una serie di prescrizioni ordinate, costituisca una metodologia efficace per la risoluzione di un qualunque problema di statica. I vari punti sono:
A. IDENTIFICAZIONE ELEMENTO: poiché si parte da situazioni reali, bisogna trasformare il problema reale in modelli fisico-matematici; è importante a riguardo la dimensione del problema; se esiste una simmetria rispetto ad esempio ad un piano, è spesso possibile trasformare il problema in due dimensioni.
B. IDENTIFICAZIONE CARICHI E VINCOLI: è questo il punto più difficile in quanto spesso sono possibili varie soluzioni e si dovrà quindi attuare una scelta, a volte adottando un atteggiamento ragionevolmente cautelativo. E’ questo il punto in cui bisogna tracciare lo schema di corpo libero preliminare dell’oggetto posto in esame evidenziando le varie forze agenti su di esso.
C. IMPOSTAZIONE EQUAZIONI DI EQUILIBRIO: dopo aver scelto il sistema di riferimento (inerziale o non) per cui il corpo sarà in quiete, posso applicare le equazioni di equilibrio.
D. DISCUSSIONE SISTEMA: le varie equazioni di equilibrio dei vari corpi formeranno a un sistema di cui posso analizzare la natura (lineare, non lineare, determinato, indeterminato, impossibile, N° di soluzioni …..).
E. SOLUZIONE: si eseguono i calcoli, anche attraverso calcolatori, e si mantiene l’attenzione sulle approssimazioni e sulle unità di misura.
F. ANALISI CRITICA DEI RISULTATI E PRESENTAZIONE: una volta ottenuti i risultati numerici matematici abbiano senso fisico, cioè se i risultati sono coerenti con gli ordini di grandezza dei dati di ingresso. Spesso il problema si conclude tracciando lo schema di corpo libero definitivo dei corpi presi in esame.

Tecnica delle costruzioni meccaniche Brenda Chiti Sintesi della lezione del 19/10/06 (1h)
Risolto il sistema derivante dall’applicazione in forma scalare della prima equazione cardinale della statica ,si ottengono i seguenti schema di corpo libero definitivo: 92,1N 50N 117,7N α =63° corpo appeso anello 5,83N 117,7N 117,7N N.B.Nello s.c.l.d.,le forze vanno SEMPRE indicate con il loro verso e direzione effettivi e il valore numerico indicato al loro fianco,è il modulo ed in quanto tale ,quantità sempre positiva.Se le forze sono inclinate rispetto al Sistema(0,x,y)considerato,si deve sempre indicare l’angolo di inclinazione.Tutto questo perché lo schema di corpo libero definitivo deve dare una idea chiara della situazione reale in cui si trova il corpo in esame. Prima di procedere,dobbiamo valutare qualitativamente i risultati ottenuti:le forze ottenute sono dello stesso ordine di grandezza di quelle iniziali,e i loro versi e direzioni coerenti con l’ipotesi di idealità dei fili :essi sono in grado di esercitare una forza su di un corpo,soltanto se tesi e considerando le F.(tiro)che agiscono sulle varie funi effettivamente esse risultano tese e quindi i risultati ottenuti sono corretti qualitativamente e si può procedere rispondendo a quella che effettivamente era la richiesta del problema,ovvero le forze agenti sui ganci A e D ad opera delle funi a e d. 5,83N Gancio A 92,1N Gancio D β=27° y
Ta= 41,2 N N.B. In questo caso il segno si deve indicare in quanto si stanno fornendo le componenti -82,43 cartesiane, e il segno serve a indicare se sono concordi o meno con il verso degli assi x . Se l’uomo esercita F=80N si ottiene un tiro negativo per la fune d,ovvero,la fune,in stato di compressione, starebbe trasmettendo una forza al gancio D. ma questo va contro l’ipotesi idealità del filo. Perciò il sistema in questa configurazione,non è in equilibrio. 2°punto:valutare la forza che la puleggia esercita sul suo perno. Valutiamo questa forza sfruttando il fatto che essa non è altro che la reazione,per il terzo principio,della forza che il perno esercita sulla puleggia in seguito a una interazione di tipo elettromagnetico(contatto). Calcoleremo quindi quest’ultima,applicando la1°equazione cardinale della statica alla puleggia,che si trova in uno stato di equilibrio. Per prima cosa,dobbiamo cercare di creare lo schema di corpo libero preliminare della puleggia valutando i carichi e le reazioni vincolari che agiscono su di essa,tenendo presente che da noi essa viene considerata ideale e non approssimabile a punto materiale,in quanto la sua forma è un elemento caratteristico. Il cavo passa nella scanalatura ricavata sulla puleggia,e perciò ci sarà una regione di contatto tra puleggia e cavo;è importante fare attenzione sul fatto che il tiro della fune non agisce sulla puleggia, ma sui vari elementini del cavo. Perciò,il tiro della fune non è un carico per la puleggia. A causa del contatto tra cavo e puleggia(interazione di tipo elettromagnetico),su quest’ultima agiranno le forze che , non ripartendosi su una zona puntiforme ma su una certa superficie,daranno luogo ad una distribuzione di pressione difficile da calcolare. Per risolvere questo problema,possiamo sfruttare il fatto che la scelta di idealizzare un corpo come punto materiale,è a nostra discrezione,e quindi,consideriamo come punto materiale il seguente elemento composto dalla puleggia più il settore di cavo ad essa aderente. Sull’elemento considerato agiscono il tiro della fune e la forza che il perno L esercita nei confronti della biella.
Il tiro della fune essendo noto,rappresenta un carico. in questo caso non si considera la forza di “contatto” tra arco di fune e puleggia in quanto essi costitui scono il nostro punto materiale,e perciò è come se fossero un unico corpo. 50N M 50N L ed M sono le componenti cartesiane della forza che il perno esercita sulla puleggia,ed essendo incognite, rappresentano delle reazioni vincolari. L ed M sono le uniche due componenti della forza che il perno esercita sulla puleggia +arco di fune puleggia in quanto il problema è bidimensionale,e perciò ogni forza ha solo due y a contatto componenti. Applico la 1° equazione cardinale della statica.
x
Rx=0 L – 50•((√2)/2) +50•2/(√16,25)=0 L=10,5N il risultato ottenuto è positivo e questo vuole R=0 dire che L ed M hanno verso coerente con quello
Ry=0 M - 50•((√2)/2) + 50•3,5/(√16,25)=0 M=78,8N da noi impostato arbitrariamente nello s.c.l.p. S. c.l.d. dell’elemento 10,5N La forza che la puleggia esercita sul perno è la reazione della forza F= 78,8 N,ovvero -78,8 N 10,5 G= -10,5 e questo risultato è qualitativamente corretto per le stesse motivazioni espresse al termine del primo quesito. 50N 50N ATTENZIONE 78N I problemi dove la configurazione di equilibrio è nota(cioè è evidente dal testo del problema) detti problemi del 1°tipo e le uniche incognite che si incontrano durante la risoluzione sono le reazioni vincolari. Nei così detti problemi del 2°tipo,dobbiamo trovare noi la configurazione di equlibrio,e quindi abbiamo due tipi di incognite:la configurazione di equilibrio e le reazioni vincolari.

Tecnica delle costruzioni meccaniche Stefano Minchev Sintesi della lezione del 23/10/06 (2h)
Problema del primo tipo La configurazione d’equilibrio è nota a priori. Le incognite sono le reazioni e si ricavano dalla soluzione di un sistema lineare. Problema del secondo tipo A priori non conosco la configurazione d’equilibrio. Mi domando se ne esista una compatibile con la struttura considerata. Matematicamente questi sistemi sono dei meccanismi ed hanno dunque almeno un grado di libertà. Per risolverli devo introdurre una variabile lagrangiana. Il sistema risolvente è non lineare. Esempio problema secondo tipo
AC=1,6m OA=3m AB=4m Esiste una configurazione di equilibrio? Il problema è del secondo tipo perché non conosco la posizione di C. Per risolvere introduco la variabile lagrangiana θ. Posso considerare M1, M2, C come punti materiali e traccio i diagrammi di corpo libero preliminare.
A questo punto sfrutto la prima cardinale della statica applicata ai singoli punti materiali ottenendo 5 equazioni da mettere a sistema.
CB∧
=cos(ϕ)sin(ϕ)
⎛
⎝ ⎜
⎞
⎠ ⎟ =
1(4 −1,6sin(θ))2 + (1,6cos(θ))2
*4 −1,6*sin(θ)
1,6*cos(θ)⎛
⎝ ⎜
⎞
⎠ ⎟

T1 − 29,4 = 0T2 − 49,1 = 0
−T sin(θ) + T2 * 4 −1,6sin(θ)(4 −1,6sin(θ))2 + (1,6cos(θ))2
= 0
T cos(θ) + T2 * 1,6cos(θ)(4 −1,6sin(θ))2 + (1,6cos(θ))2
− T1 = 0
Risolvendo il sistema ottengo una funzione F(θ)= 0
49,1* tan−1(θ)* 4 −1,6sin(θ)(4 −1,6sin(θ))2 + (1,6cos(θ))2
+ 49,1* 1,6cos(θ)(4 −1,6sin(θ))2 + (1,6cos(θ))2
− 29,4
Con l’ausilio del calcolatore deduco che l’unica soluzione fisicamente accettabile è: θ=68,9° T=51,3N Considerazioni generali
• Essendo il problema non lineare piccole alterazioni dei carichi possono modificare notevolmente le condizioni d’equilibrio. Inoltre, possono esistere più condizioni d’equilibrio.
• Una piccola perturbazione può avere due esiti: il sistema torna nella condizione iniziale equilibrio stabile il sistema non torna nella condizione iniziale equilibrio instabile
Corpo esteso Con il termine corpo esteso si indica un corpo formato da una collezione di punti materiali. Questo nuovo modello permette di considerare anche la forma, le dimensioni e la struttura del corpo. Esistono corpi estesi di punti materiali facilmente identificabili modello discreto Esistono corpi estesi di punti materiali non facilmente identificabili modello continuo Per studiarlo occorre arricchire le nozioni utilizzate per il punto materiale. Vettore applicato Per lo studio del corpo esteso devo considerare anche il punto d’applicazione delle forze.
F → (OP,F ) Momento Consideriamo un punto Q dello spazio, si definisce momento di F rispetto al polo Q il vettore libero:
M =def
QP ∧
F

Tecnica delle costruzioni meccaniche Lorenzo Bertini Sintesi della lezione del 25/10/06 (2h)
Diversamente dal modello di punto materiale, il modello di corpo esteso rende indispensabile
conoscere e individuare il punto di applicazione di ciascuna forza. Le forze vanno quindi rappresentate come vettori applicati: (OP, F), dove OP è la posizione vettoriale del punto di applicazione ed F il vettore che rappresenta intensità, direzione e verso della forza.
La retta rPF, passante per il punto di applicazione P e parallela alla direzione di F, si dice “retta di applicazione” della forza.
Dato un punto Q detto “polo”, si definisce il vettore libero (non applicato) MQ = QP ∧ F
momento della forza (OP, F) rispetto a Q, indicando con “∧ ” il prodotto vettoriale. Rimane un po’ “strano” a prima vista il fatto che il momento dipenda da una scelta arbitraria del
polo, ma in realtà vedremo che le leggi fisiche relative al momento saranno indipendenti dal polo scelto, o includeranno l’indicazione del polo da utilizzare.
Va precisato che il vettore MQ non rappresenta un ente fisico concreto, ma un’elaborazione matematica di quelle entità fisiche che sono le forze; questo tipo di elaborazione risulta comodo perché riassume informazioni relative sia alla forza che al suo punto di applicazione. Si nota, inoltre, che nel caso del corpo esteso anche la risultante delle forze (il vettore libero R = Σ Fi) è un ente matematico privo di un concreto significato fisico, dato che non ha un punto di applicazione definito. • Se Q non appartiene alla retta di applicazione rPF, allora Q, P ed F definiscono un piano, ed MQ,
per le regole del prodotto vettore, è ortogonale a quel piano. Il verso si determina con la regola della mano destra.
• Se Q appartiene a rPF, il momento è nullo. • Spostando il punto di applicazione P lungo rPF, il momento non cambia. Questo procedimento
va però usato con prudenza, perché cambiando il punto di applicazione in generale si altera il problema fisico preso in esame.
• Spostando Q lungo una direzione parallela a rPF, il momento non cambia. Questa procedura è più lecita dal punto di vista fisico.
• | MQ | = | F |*b , dove b è uno scalare positivo (“braccio”, “arm”) che indica la distanza di Q da rPF.
• MQR = Σ QPi × Fi si dice momento risultante di un sistema di forze applicate.
Teorema di Varignon: se più vettori Fi sono applicati in uno stesso punto, allora, scelto un polo Q, il momento risultante MQR di quei vettori è uguale al momento rispetto a Q della risultante dei vettori stessi, Σ QP × Fi = QP × Σ Fi = QP × R
Applicando questo teorema, si può scomporre una forza per facilitare il calcolo del momento: in figura, F è stata scomposta nelle sue componenti parallele agli assi. È facile determinare la distanza di Q dalla retta di applicazione di Fx, come b1 = | y(Q) – y(P) |; analogamente si determina la distanza b2, e si ricavano quindi i momenti di Fx ed Fy con la proprietà | MQ | = | F |*b (vedi sopra). La regola della mano destra ci dice che entrambi i momenti così calcolati sono negativi, in quanto discordi con il verso dell’asse z, visto che il sistema di riferimento è destrogiro. La somma algebrica di questi due momenti ci darà il momento di F rispetto a Q, che
quindi sarà anch’esso negativo. Ricavare le distanze del polo da rette parallele agli assi è più facile che calcolare la sua distanza dalla retta di applicazione, specialmente in tre dimensioni, per questo l’applicazione del teorema di Varignon è molto comoda.
Q
F y
x O
Fy
Fx b1
b2
P

Si dice sistema di forze un insieme di forze applicate che agiscono sullo stesso corpo esteso. Alcuni sistemi di forze particolari hanno proprietà interessanti.
Sistema di forze piano: tutte le forze e le rette di applicazione appartengono allo stesso piano α. • R appartiene ad α. • Ogni MQ (incluso MQR) è ortogonale ad α se anche Q appartiene al piano. In tal caso, posso
trattare i momenti come scalari, ricordandomi di considerare il segno. Sistema di forze parallele: tutti i vettori F sono paralleli; si distingue tra sistemi di forze
parallele a risultante nulla e a risultante non nulla. • Se R è non nulla, è parallela alla direzione comune delle forze. In tal caso si dimostra che
esiste una determinata retta (detta asse centrale del sistema) tale che, se si applica R a un punto arbitrario di quella retta, il momento di R rispetto a Q è uguale al momento risultante del sistema MQR, comunque si scelga il polo Q. L’asse centrale è lo stesso a prescindere dal sistema di riferimento.
[diversamente dal corso di Meccanica Razionale, nel corso di TCM si utilizzerà il concetto di asse centrale solo in relazione a sistemi di forze parallele]
Coppia (“couple”): è un sistema di forze parallele a risultante nulla, formato da due forze uguali
in modulo e direzione, ma opposte in verso. • Se le rette di applicazione delle due forze sono distinte, la distanza tra le due si chiama
braccio della coppia e si indica con b, scalare positivo. In tal caso la coppia è evidentemente un sistema di forze piano.
• Se le rette di applicazione coincidono, il piano non è definito, e la coppia si dice “coppia di braccio nullo”.
• Il momento risultante MQR di una coppia è indipendente dal polo, e ha modulo | MQ | = F*b, dove F è il modulo comune delle due forze e b il braccio. Il verso di MQR si determina sempre con la regola della mano destra.
Dati due sistemi di forze applicate Σ1 e Σ2 nello stesso sistema di riferimento, e scelto un polo
Q, se si ha R1 = R2 ed MQR 1 = MQR 2 i due sistemi si dicono STATICAMENTE equivalenti. Teorema di riduzione: dato un sistema di forze applicate Σ e un punto A dello spazio, è sempre
possibile e univoco determinare una forza F applicata in A ed un momento M affinché Σ sia staticamente equivalente al sistema di forze applicate Σ’ formato da (OA, F) e da una qualsiasi coppia di momento M.
Si può dimostrare che quella forza F necessaria è uguale a R del sistema Σ, e che quel momento M è proprio uguale al momento risultante del sistema Σ calcolato rispetto al polo A. Inoltre:
• Un sistema di forze parallele è staticamente equivalente alla propria risultante R applicata lungo l’asse centrale.
• Un sistema di forze a risultante nulla è staticamente equivalente ad una coppia di momento pari al momento risultante del sistema rispetto ad A. Se anche quel momento risultante è nullo, il sistema si dice autoequilibrato.
Lavoro di un sistema di forze applicate: per definizione, il lavoro totale del sistema sarà uguale
alla somma algebrica dei lavori delle forze che lo compongono. Per ogni singola forza Fi, al fine di calcolarne il lavoro Li, devo considerare come “spostamento” (finito o infinitesimo, a seconda dei casi) lo spostamento del punto di applicazione di Fi.
Allo stesso modo, la potenza istantanea sviluppata dal sistema di forze applicate è la somma delle singole potenze sviluppate dalle singole forze:
W = Σ Fi iv i , dove con “i” si è indicato il prodotto scalare, e v i va intesa come la velocità istantanea del punto di applicazione di Fi.

Tecnica delle costruzioni meccaniche Francesco LaPastina Sintesi della lezione del 25/10/06 (2h)
Un corpo esteso può essere pensato come l’insieme di tanti punti materiali (anche infiniti) che sono collegati tra di loro tramite forze elettromagnetiche. Su di esso agiscono forze esterne e forze interne (interazioni interne al corpo). Prendiamo come esempio un corpo poggiato su una superficie e lo divido in tre punti materiali A,B,C (una pila di monete).
A A B C
B C Sul punto A agirà la forza peso (esterna),altre forze e
trascurabili come la forza di Archimede e forze interne come la reazione di B su A. sterne
Quindi per individuare forze interne ad un corpo esso va diviso in punti materiali. Si dimostra che le forze interne a un corpo sono autoequilibrate (R=0,M=0) infatti per il 3°principio della dinamica su due punti del corpo agirà una coppia di forze a braccio nullo avente stessa intensità,direzione ma verso opposto.
Preso un sist.riferimento (x,y,z) posso calcolare il lavoro virtuale fatto dalle forze di interazione tra A e B.
A
B
FBA
FAB
x
y
z
δA
δB
F=FAB=FBA δL=F·δxB-F·δxA=F(δxB-δxA) Nel caso di forze repulsive il lavoro è positivo quando i due punti si allontanano, è negativo quando si avvicinano, nullo i due punti mantengono le loro distanze mutue e il corpo è definito infinitamente rigido e le forze interne agenti in esso sono energeticamente nulle. Se le forze sono attrattive per il segno del lavoro accade il contrario. Infine per un corpo esteso se invece di dividerlo in punti materiali lo dividiamo in infiniti cubetti infinitesimi aventi una certa dimensione,forma e massa dobbiamo introdurre il concetto di densità,grandezza intensiva che è propria di ogni corpo continuo.

Tecnica delle costruzioni meccaniche Donato Passarelli Sintesi della lezione del 30/10/06 (2h)
COR PI CONTINUI Si definisce corpo continuo un corpo costituito da un materiale che conserva sempre le proprietà fisiche seppur viene suddiviso in tante piccole parti. Quindi si può considerare un sistema continuo come l’insieme di infiniti punti materiali e pertanto il comportamento del punto materiale è alla base anche dello studio del corpo continuo. DENSITA’ La massa non è una grandezza puntuale ma estensiva e perciò s’introduce il concetto di densità la quale è la grandezza intensiva associata alla grandezza estensiva massa. Densità di corpi costituiti da materiali omogenei Un materiale è omogeneo se la massa non ha la tendenza ad addensarsi in certe zone. Per rilevare operativamente la densità di un materiale omogeneo si procede alla frantumazione del corpo in pezzetti più o meno piccoli, dopodichè si opera il rilievo della massa e del volume di ogni pezzetto riportando tali valori su un grafico avente per ascisse il volume e per ordinate la massa. Il grafico (fig.1) che si ottiene è caratterizzato da una dispersione di punti che si trovano in una banda negli immediati dintorni di una retta passante per l’origine e formante un angolo α con l’ascissa positiva.
α
V
M Si definisce:
- densità media T
T
VM
=γ
- densità αγ tg=
Fig.1
I valori di densità di alcuni materiali omogenei sono i seguenti: leghe di ferro 7,8 kg/dm3; leghe leggere 2,7 kg/dm3; leghe di rame 8,9kg/dm3; plastiche polimeriche 0,9÷1,2 kg/dm3; plastiche rinforzate 1,8÷2,4 kg/dm3; legno 0,95÷1,05 kg/dm3. Densità di corpi costituiti da materiali non omogenei Non tutti i materiali sono omogenei, esistono materiali non omogenei in cui la massa si addensa maggiormente in certe zone (es. calcestruzzo). Se si ripetono le stesse operazioni fatte per i materiali omogenei si ottiene un grafico con punti maggiormente dispersi e quindi inizialmente non riconducibili a una retta. Allora si fanno misure con volumi sempre più piccoli contenenti sempre un certo punto A e si ottiene un grafico riportante una linea monotona crescente.
Si definisce, in questo caso, densità 00
)(lim α==γ→
tgVVM
V
Se il limite esiste finito e non nullo, per volumi piccoli la curva può esser approssimata con una retta nell’intorno del punto A considerato.
Per cui il materiale è uniformemente denso al limite ne segue che dVdMzyx AAA =),,(γ
La massa del cubetto infinitesimo non è la sua densità ma bensì dVdM ⋅= γ .

Conosciuta la densità di un corpo continuo si può ricavare la sua massa, se è costituito da materiale omogeneo VM ⋅= γ se, invece, è costituito da materiale non omogeneo
. ∫Ω
= dxdydzzyxM ),,(γ
FORZE AGENTI SU CORPI CONTINUI Le forze agenti su corpi continui possono essere di due tipi: 1) Forze di volume (o di massa) sono appunto forze distribuite sull’intero volume del corpo e per questo s’introduce il concetto di densità volumica di forza. Tipiche sono il peso e le forze d’inerzia.
Peso specifico gVPp
V⋅γ==
→0lim
dove P è il peso; V è il volume; γ è la densità; g è l’acc. gravitazionale.
p si misura in 3mN o, spesso in TCM, in 3mm
N .
Il peso totale di un corpo può essere schematizzato come il vettore risultante di un sistema di vettori paralleli, seppur non ha senso fisico parlare di punto d’applicazione, spesso si ritiene applicata all’asse centrale. Forza specifica di trascinamento TRaf ⋅−= γ 2) Forze di superficie sono interazioni elettromagnetiche che interessano gli elettroni superficiali del corpo.
Tipica è la pressione (traction) definita come S
FtS
)(lim0
Ω=
→ dove S è l’area di una superficie
Ω appartenente al corpo considerato. t si misura in N/m2 chiamato Pascal Pa o, spesso in TCM, in N/mm2 o MPa. FORZE CONCENTRATE (o forze puntuali) A volte, al fine di semplificare il problema, è possibile schematizzare le distribuzioni di forze come forze concentrate (F.C.). E’ però necessario ricordare che le F.C. sono una pura idealizzazione in quanto se si applicano forze finite su superfici infinitesime ∞→t . In sostanza le F.C. permettono di operare una schematizzazione dei corpi con un numero di dimensioni inferiore (es. tiro del filo ideale che è una forza relativa a u corpo monodimensionale). Supponendo di avere un sistema a risultante non nulla di forze parallele di superficie
applicate su una superficie piana Ω ( ∫Ω
∧
≠⋅⋅⋅= 0),( dydxmyxfR ), tale sistema può essere
ridotto ad un sistema staticamente equivalente a una unica forza. Per fare ciò è necessario
trovare un punto d’applicazione (C) della risultante ( R ) poiché direzione e verso ( ) sono noti. Il punto C è detto centro di spinta e le sue coordinate x,y sono calcolabili con la
formula:
∧
m
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
⋅⋅⋅
⋅⋅⋅
⋅⋅ ∫
∫
∫Ω
Ω
Ω
dydxyxfy
dydxyxfx
dydxyxf ),(
),(
),(1
Se f(x,y) è costante (la distribuzione è uniforme su Ω) il centro di spinta coincide col baricentro geometrico della figura Ω.

Tecnica delle costruzioni meccaniche Cosmo Valente Sintesi della lezione del 2/11/06 (1h)
La seguente lezione riguarda le nozioni di sistemi discreti e momenti concentrati, definisce i loro effetti energetici ed infine generalizza il terzo principio della dinamica. Iniziamo con il precisare la funzionalità e le caratteristiche che deve avere un Diagramma qualitativo quotato, con il quale potremmo effettuare varie verifiche derivanti da un problema: infatti, nello sviluppare un diagramma di questo genere, non ci interesserà una dettagliata e precisione matematica, ma il nostro interesse verterà particolarmente sui minimi e massimi della funzione considerata, oltre i quali raramente ci spingeremo, per ottenere in modo più semplice possibile il numero minimo di informazioni utili ad individuare e risolvere i quesiti dei nostri problemi. Adesso passiamo ad analizzare i momenti concentrati. In precedenza si è già definito un sistema discreto e si è detto che le sue caratteristiche statiche, nate dall’insieme finito di forze interne ed esterne, sono individuabili attraverso la semplificazione di tutte le forze agenti con un qualcosa di staticamente equivalente, ovvero il vettore risultante più una coppia di forze ( salvo per i casi particolari in cui la risultante o il momento sono nulli, in tal caso le forze vengono riassunte soltanto rispettivamente con una coppia o con una forza). Da questo risulta comprensibile che “ applicare un momento” è di per se una definizione errata, una semplificazione verbale usata per evitare di ripetere ogni volta che si sta applicando ‘un insieme di forze a risultante nulla ed equivalente a una oppia di momento dato’. Infatti i momenti concentrati non possono esistere per due motivi fondamentali: se fosse concentrato sarebbe insopportabile da un corpo continuo, inoltre il momento è definito forza prodotto vettore braccio, ma questo diventerebbe insensato non essendoci estensione fisica in quanto il braccio risulterebbe zero. Allora, quando parliamo di un momento concentrato, dobbiamo immaginarlo come un insieme di forze applicate in una parte piccola rispetto al corpo, che idealmente consideriamo puntiforme. Questa semplificazione ci sarà spesso utile nella risoluzione dei problemi. Come possiamo rappresentare i nostri momenti? Naturalmente in tre dimensioni ci potrebbero essere dei problemi, ma tutto è risolto convenzionalmente usando una doppia freccia (che con la regola della mano destra indica la direzione del pollice) adatta per scomposizioni in assonometria. In alternativa può essere usata una freccia tridimensionale ricurva, che identifica opportunamente la direzione del momento. Naturalmente in due dimensioni basterà una semplice freccia curva che indichi il verso. Inoltre dobbiamo considerare gli effetti energetici di un momento applicato in un punto. Da segnalare che da ora in avanti quando parliamo di un punto intendiamo una piccola zona rispetto al corpo, che per abbreviazione definiremo solo con un ente geometrico chiamato punto. Prima di tutto ipotizziamo che il momento rimanga costante ( stesso verso e direzione) nel tempo, la zona vicino al punto di applicazione del momento trasli e ruoti, che l’angolo di rotazione sia misurato con la stessa convenzione del momento. L’unica cosa che ci resta a questo punto è riuscire a definire l’angolo di rotazione come un vettore, in quanto le rotazioni finite non sono assimilabili come tale, ma per noi è indispensabile causa la definizione di Lavoro, che l’angolo diventi vettoriale. Risolviamo il problema considerando la rotazione infinitesima (di piccolissima entità), quindi il lavoro infinitesimo diviene uguale al prodotto scalare tra il vettore Momento e la rotazione infinitesima. La potenza sviluppata dal momento è quindi il momento moltiplicato scalarm4ente per la velocità angolare. Infine possiamo concludere che ogni azione statica può essere suddivisa in azione di forza e azione di momento, e con questo si può estendere il terzo principio: a ogni azione corrisponde un’azione uguale e contraria. Il termine azione che per noi rappresenta l’effetto complessivo di un sistema di forze applicate in una zona vicina a un punto, e non deve essere confuso con l’omonimo termine usato in meccanica analitica che indica l’integrale del lavoro nel tempo.

Tecnica delle costruzioni meccaniche Marco Poli Sintesi della lezione del 6/11/06 (2h)
Nell’ambito dello studio del corpo esteso ci soffermiamo su un particolare tipo di corpo esteso: il corpo rigido. Dalla teoria sappiamo che un corpo è infinitamente rigido (Rigid Body) se dati due punti qualsiasi appartenenti a esso Pi ,Pj : | Pi ,Pj|= costante , cioè la mutua distanza fra i punti è costante e quindi le forze interne producono un lavoro nullo. Ma in pratica, se applico un’azione statica a un corpo (forza + momento), la forma del corpo cambia sempre (def. di forza statica); dunque il corpo infinitamente rigido non sarà altro che un modello che potrò introdurre se le distorsioni sono di entità esigua tale da poterle trascurare. La rigidezza ( stiffness) invece è la proprietà di un corpo che quantifica l’entità delle distorsioni rispetto alle sollecitazioni applicate. Quando si progetta si può cercare la rigidezza tentando di approssimare l’oggetto ad un corpo inf. rigido oppure al contrario la deformabilità (es. molle). Un corpo esteso (e quindi anche un corpo inf. rigido) è in equilibrio se lo sono tutti i suoi punti, cioè se sono fermi rispetto un osservatore per un tempo finito (anche piccolo). Se scelgo un sistema non inerziale solidale al corpo rigido, qualsiasi problema diventa un problema di statica.
• Esperimento: Prendiamo una lamiera di acciaio (di dimensioni paragonabili agli altri oggetti del problema) e colleghiamo n cavi ai quali sono applicate n masse tramite pulegge. Se per ipotesi considero il corpo rigido, devo far in modo che i tiri dei cavi siano tali da non deformare significativamente il corpo. Lascio oscillare il sistema e suppongo che dopo un certo tempo, per le inevitabili forze dissipative, il corpo andrà a fermarsi. A questo punto introduco un sistema inerziale e calcolo i tiri dei cavi o semplicemente li misuro disponendo dei dinamometri ideali fra l’attacco e il cavo. Le forze che agiscono sul corpo:
1. Peso: distribuzione di forze uniformemente diffusa sulla lamiera Staticamente equivalente alla risultante
applicata nel centro di massa. 2. Tiro: distribuzione di forze di superficie. Suppongo la superficie molto piccola → Forze
concentrate. 3. Forze interne: sono l’estrinsecazione dei legami chimici (complicato sistema di forze
elettromagnetiche) non facilmente misurabili e si manifestano per la rigidezza del corpo Le forze di inerzia sono assenti perché il sistema è inerziale.
Per evidenza sperimentale se il corpo è in equilibrio valgono: • R=0 • Mr=0
In particolare se R=0 il momento è uguale qualsiasi polo si scelga (Mb=Ma+BAΛR). Inoltre le forze interne sono un sistema autoequilibrato ( Rint=0, Mint=0)→
• Rext=0 I Cardinale • Mext=0 II Cardinale
Considerazioni

Σ1
Σ2
Se considero due sistemi Σ1, Σ2 di azioni esterne applicate a un oggetto tali che Σ1≠ Σ2 ma che abbiano caratteristiche statiche uguali:
• R1=R2 • Mr1=Mr2
I due sistemi sono staticamente equivalenti e producono gli stessi effetti sull’equilibrio se il corpo non è deformabile. Posso fare trasformazioni di questo tipo solo se interessa l’equilibrio del corpo rigido, cioè i due sistemi non sono equivalenti ma soltanto staticamente equivalenti.
Alcuni esempi : • Sist. staticamente equivalenti ma non equivalenti
• Sist.
deformabile
I due sistemi dovrebbero essere staticamente equivalenti ma non lo sono perché il corpo è deformabile
Gradi di libertà
Per definire univocamente la posizione di un punto nello spazio devo usare 3 quantità scalari indipendenti( lineari, angolari, ecc…) Queste quantità si chiamano coordinate lagrangiane e il loro numero definisce i gradi di libertà (degree of freedom DOF) di un oggetto; in particolare il punto ha 3 gradi di libertà. I vincoli introducono analiticamente delle equazioni che limitano i DOF del sistema. Il corpo esteso discreto fatto di n punti materiali quindi ha 3*n DOF, se il corpo esteso è continuo avrà infiniti DOF mentre il Corpo rigido introduce una serie di vincoli legati al fatto che le mutue distanze fra i punti devono rimanere costanti. Questa serie di vincoli, difficilmente analizzabili dal punto di vista analitico, può essere facilmente descritto fisicamente: considero 3 punti appartenenti a un corpo rigido A,B,C in modo
che individuino univocamente un piano.
y
x
z
ya xa
A za
• Per posizionare A ho bisogno di 3 DOF • B è vincolato a stare su una sfera di raggio uguale alla distanza di A da B→ per posizionare
B ho bisogno di 2DOF (per definire univocamente la posizione di un punto su una superficie sono sufficienti 2 DOF)
• C è vincolato a stare su due sfere di raggi uguali alle rispettive distanze di C da A e di C da B, la cui intersezione è una circonferenza→ per posizionare C ho bisogno di 1 DOF(per definire univocamente la posizione di un punto su una linea è sufficiente 1 DOF)
Per definire la configurazione di un corpo rigido ho quindi bisogno di 6 coordinate lagrangiane. Il problema è algebrico. Per definire la configurazione di un corpo esteso non rigido ho bisogno di infinite coordinate lagrangiane. Il problema è differenziale.

Tecnica delle costruzioni meccaniche Juri Mazzei Sintesi della lezione del 8/11/06 (2h)
• Che cos’è un vincolo? I vincoli possono essere visti sotto un duplice aspetto: - come limitazione cinematica, cioè come condizioni che limitano i gradi di libertà di un punto o
di un corpo. - come agenti statici, cioè sono in grado di esercitare azioni sui corpi. I momenti e le forze dei vincoli sono incognite a priori, infatti, a differenza del carico che deve essere fornito (o ipotizzato), le reazioni vincolari si adattano ai carichi dell’oggetto. Le reazioni vincolari si esplicano attraverso forze concentrate se consideriamo un punto materiale, per un corpo esteso le possibilità di vincolare il corpo sono molto più varie. • Il telaio (frame) Immaginiamo un corpo rigido, su cui sono applicate azioni esterne, il vincolo è costituito da uno o più corpi che impediscono il moto libero del corpo rispetto ad essi. Il corpo rimarrà in quiete in quanto vincolato, cioè il sistema di forze è equilibrato, reso tale dalle reazioni vincolari che bilanciano le forze esterne: R=0 6 equazioni della statica, 6 D.O.F MR=0 linearmente indipendenti Anche nel piano 3 eq. e 3 d.o.f. L’oggetto che riceve le azioni dei vincoli si chiama telaio, un modello avente massa infinita rigidezza infinita resistenza infinita Questo è un oggetto ideale, ma spesso possiamo considerare, dati due corpi, il telaio quello che ha una massa, una rigidezza e una resistenza di gran lunga maggiori. In questo senso è utile per isolare l’aspetto del problema che sto analizzando. I vincoli esercitano ovviamente forze di natura elettromagnetica e, per essere calcolati, devono essere trasformati in vincoli ideali o semplici. Questa è la parte più difficile! Analizziamo alcune tipologie di vincoli semplici in 2D per un corpo esteso piano: vincoli piani (plane constraints). • Appoggio semplice (simple support)
Considero un corpo esteso nel piano e un punto A non necessariamente sul contorno. Faccio passare una linea differenziabile in A. Si definisce un versore tangente e uno normale alla linea in A. Il vincolo di appoggio è che il punto A deve appartenere alla linea. Se il corpo è esteso deformabile ha ∞ gradi di libertà, se è anche rigido ed un suo punto è vincolato a muoversi su Γ, i D.O.F sono 2. Se il corpo è deformabile i punti possono muoversi anche lungo n, questo non vale se consideriamo una superficie infinitesima intorno ad A. Il vincolo riesce ad esercitare una forza nella direzione di impedito movimento, motivo per cui, per determinare questa reazione, devo trovare solo l’entità della forza dato che la direzione è nota (// a n). La zona limitrofa ad A si può spostare solo lungo direzioni tali che la forza di reazione vincolare non fa lavoro.
Γ A
τ n
Vincoli reali: un corpo esteso con zona di contatto piccola su un piano lubrificato ( senza attrito). Un cavo è un vincolo di appoggio semplice. Questi due vincoli non sono però vincoli ideali perché le forze sono esercitate solo in un verso, si dice che sono monolateri. Il procedimento è quello di considerare il corpo con le azioni che agiscono su di esso, successivamente valutiamo se i vincoli sono efficaci. Rappresentazione schematica di un appoggio semplice: Bielletta carrellino mobile (binario bilatero) La competenza fondamentale è quella di saper fare lo schema statico
Non è interessante perché agisce sul telaio, quando disegniamo la forza dobbiamo togliere il vincolo.
1
τ
τ
n A
n
A
A
S

Cerniera (hinge) Considero un punto A e lo costringo a stare fermo, quindi il corpo può F solamente ruotare intorno all’asse z passante per A. V Molteplicità = 2 ⇒ D.O.F = 1 2 scalari indipendenti (T,S) Il perno di una puleggia ideale è, ad esempio, una cerniera ideale; non ci deve essere nessun impedimento al moto di rotazione, non ci deve essere attrito.
S
T S
A
La rappresentazione schematica di una cerniera si fa così: Attrito statico: entro certi limiti, la forza normale e la forza tangenziale sono indipendenti, quindi si ha una cerniera. Attrito dinamico: conosciamo Fa a partire da P, molteplicità 1, è un appoggio. Incastro (built-in or fixed constraint)
Indica la cerniera sul telaio
È una = coppia di appoggi che cerniera convergono in un punto
Impedisce tutti i movimenti di una zona limitrofa ad A. Se il corpo è infinitamente rigido tutto il corpo è fisso. Molteplicità = 3
A A
A In A agiscono forze di superficie che equivalgono staticamente al sistema formato da T, S e W. • Doppio pendolo o bi-pendolo • Doppio-doppio pendolo o doppio bi-pendolo
τ λ
Oggetto infinitamente rigido privo di massa
S
T W
Impedisce la traslazione, esercita una forza piana. Impedisce una rotazione, esercita un momento.
Guida senza attrito Molteplicità = 2
W
R
La rappresentazione statica si fa così:
A
W
La rappresentazione statica è la seguente:
Consente la traslazione nel piano lungo τ e λ ma non può ruotare per una zona limitrofa ad A. Molteplicità = 1
2

Tecnica delle costruzioni meccaniche Fabio Sisi Sintesi della lezione del 9/11/06 (1h)
Coppia di cuscinetti radiali rigidi a sfere di cui uno bloccato assialmente: La configurazione rappresentata è schematizzabile come quella con cuscinetti orientabili cioè con CERNIERA e APPOGGIO. Infatti anche i cuscinetti radiali possiedono un certo grado di orientabilità (nell’ordine delle frazioni di grado) garantito dalla casa costruttrice, entro il quale viene assicurato il loro corretto funzionamento. Si rende necessario verificare a posteriori che il modello sia corretto, in particolare tenendo conto delle tolleranze geometriche di parallelismo e delle deformazioni dell’albero. SCHEMATIZZAZIONE:
cerniera appoggio
VINCOLI e ATTRITO Nei vincoli semplici l’azione dell’attrito è stata trascurata, questo fenomeno però in molti casi (specie in meccanica) deve essere presente. L’attrito può essere di 2 tipi: STATICO o CINETICO ( DINAMICO) e in base alla condizione nella quale ci troviamo, il comportamento operativo da seguire cambia radicalmente. Attrito Statico Affinché ci sia attrito statico, tra i punti di contatto non deve esserci moto relativo; in altri termini il punto di contatto deve essere istantaneamente fermo (
rv = 0): siamo in condizione di aderenza. In condizioni ideali (cioè nel caso di contatto
puntiforme) la forza di attrito statico non compie lavoro Il classico esempio è il rotolamento (puro) di un pneumatico. Attrito cinetico In questo caso siamo in presenza di un moto relativo, dunque di una velocità relativa tra i punti a contatto; da questo consegue che la forza di attrito cinetico farà lavoro. Alcuni esempi sono lo strisciamento dei pneumatici dopo il bloccaggio delle ruote o dall’azione delle pastiglie dei freni. • SCHEMATIZZAZIONE dei VINCOLI
*FBD ruota in presenza di attrito statico
φ
Prendiamo in esame il moto di una ruota su un piano scabro nelle 2 diverse configurazioni di attrito: Attrito statico
Possiamo dire che è indipendente da S N ipotizzando che | |N||S Piano con attrito sμ≤
R
,
cioè che (geometricamente) la risultante NS += resti entro il cono di attrito. L’ampiezza di quest’ultimo è così legata al coefficiente di attrito statico:
sarctgμα = §.
Per quanto detto questa situazione è schematizzabile con una CERNIERA. Occorre poi verificare che l’ipotesi precedente sia soddisfatta insieme alla condizione di vincolo unilatero. Se trovassi delle contraddizioni significa che in quella configurazione l’attrito non può mantenere l’equilibrio: si può supporre che l’attrito diventi cinetico.
* Ruota su un piano scabro
*FBD ruota in presenza di attrito dinamico
Attrito cinetico
In questa situazione la forza d’attrito S è completamente definita, nota N . Si noscono infatti: copunto di applicazione (il punto di contatto), direzione (del moto relativo), verso (è sempre opposto al verso del moto relativo, infatti l’attrito è un’azione dissipativa) e intensità (che, nota la forza normale, è univocamente determinata dalla relazione |N||S| sμ= .
In questo caso la risultante coincide geometricamente con la generatrice del cono di attrito). L’azione dell’attrito cinetico verrà allora schematizzato con il vincolo APPOGGIO, a meno di contraddizioni nel verificare che il vincolo è unilatero.
• OSSERVAZIONI: - [Caso di strada asciutta]: se un auto parte ‘regolarmente’ le route non devono “slittare”, siamo in presenza di attrito
statico. Se ipotizziamo l’auto un pt materialie, la forza normale è uguale al peso (in modulo), posso esercitare una forza tangenziale arbitraria in un certo range, producendo l’accelerazione voluta. Le 2 forze sono indipendenti.
- [Caso di strada ghiacciata]: l’accelerazione di partenza è univocamente determinata dal coefficiente di attrito (cinetico) presente tra gomme e ghiaccio. Intercorre una relazione di dipendenza tra le forze tangenziale e normale.
- [Frenata con bloccaggio delle ruote]: è il fenomeno opposto al precedente. In questo caso in caso di strisciamento dei pneumatici è la decelerazione ad avere un preciso valore (funzione del coeff. di attrito cinetico), la frenata non può essere “dosata”. Il risultato è una frenata meno efficace, vista la relazione sperimentale: ks μμ ≥ . I sistemi ABS evitano questo
fenomeno.
sμ≤§ Infatti da | consegue che |N||S
sμ≤|N||S|
stg μφ ≤ αμφ =≤ sarctg

TECNICA DELLE COSTRUZIONI MECCANANICHE Alberto Ambrogi - sintesi della lezione del 13-11-2006 (2h)
Figura 1
Per svogere i calcoli è opportuno (quando il problema lo consente) utilizare usare una forze e momenti concentrati, ma nello schema di corpo libero bisogna cdi schematizzare il meglio possibile tutti i vincoli e i carichi, quindi per esempio si rappresenterà il peso distribuito.
ercare
ipartire
ei
VARIANTE DEL PROBLEMA
Figura 2
Non è necessario per la risoluzione ricominciare tutto da capo, basta rdalle equazioni cardinali già impostate. Si conclude che in questa configurazione non c’è l’equilibrio. Quindi o si cambia la configurazione dvincoli o altrimenti il corpo non sta in equilibrio. A questo punto è lecito chiedersi se esiste , e quale potrebbe essere la nuova configurazione di equilibrio. Si può dunque impotizzare che la lamiera trovi una nuova configurazione di equilibrio come riportato in figura 2.
Figura 3
Adesso grazie alle cardinali si può determinare l’angolo di equilibrio, ovviamente non c’è certezza a priori che la configurazione di equilibrio esista o che sia unica.
E’ importante sottolineare che nello studio trascuro tutto quello che succede tra le due distinte conigurazioni di equilibrio. Questa è l’importante differenza che si incontra nello studio dei problemi di secondo tipo rispetto a quelli di primo tipo. Infatti durante questo transitorio dinamico le oscillazioni dei corpi potrebbero causare delle intense forze sui corpi, quindi questo transitorio ci fa perdere il controllo del sistema. E’ per questa ragione che in ambito tecnico si cercano sempre soluzioni che mantengano il sistema in equilibrio anche per piccole variazioni dei carichi; in modo tale che piccole variazioni dei dati di ingresso producano piccole variazioni dei dati di uscita.

Caratterizzazioni dei vincoli nello spazio
Tipo di vincolo Movimenti consentiti Movimenti impediti e reazioni vincolari
APPOGGIO SEMPLICE Caratterizzazione cinematica: il punto O è costretto ad appartenere alla superficie W che assumiamo diferenziabile in un intorno di O. Caratterizzazione statica: il vincolo realizza una forza normale al piano tangente a W passante per O.
CERNIERA PIANA NELLO SPAZIO Caratterizzazione cinematica: Il punto O è costretto a muoversi esclusivamente lungo n. Caratterizzazione statica: il vincolo realizza due forze perpendicolari passanti per O ortogonali ad n. Le due forze individuano ad ogni istante un piano su cui O non può muoversi. CERNIERA SFERICA Caratterizzazione cinematica: il punto O non può muoversi Caratterizzazione statica: il vincolo realizza tre forze passanti per il punto O.
CERNIERA COMPLETA LIBERA ASSIALMENTE Caratterizzazione cinematica: Il corpo può ruotare intorno all’asse n e muoversi parallelamente all’asse. Caratterizzazione statica: il vincolo realizza due forze e due momenti perpendicolari all’asse n.
CERNIERA COMPLETA Caratterizzazione cinematica: il corpo può solamente ruotare intorno all’asse n. Caratterizzazione statica: il vincolo realizza tre forze e due momenti
SLITTA O GUIDA PRISMATICA Caratterizzazione cinematica: tutti i punti vicini ad O devono necessariamente muoversi parallelamente ad n. Caratterizzazione statica: il vincolo realizza due forze perpendicolari alla retta n e tre momenti.
INCASTRO SPAZIALE Caratterizzazione cinematica: tutti i punti vicini ad O non possono muoversi in nessuna direzione. Caratterizzazione statica: il vincolo realizza tre forze e tre momenti.
WW
n n
n n
n n
n n
Passare da 2 a 3 dimensioni è relativamente facile dal punto di vista teorico, ma risulta più complicato l’uso di questa teoria applicata:
• Alla schematizzazione dei vincoli • Alla realizzazione del modello matematico dei vincoli • Alla riduzione di un sistema complicato di forze ad un sistema più semplice
Infine risulta evidente dallo schema sopra riportato la dualità statico-cinematica, secondo cui il numero dei gradi di libertà sottratti a un corpo a causa dei vincoli corrisponde al numero di reazioni vincolari (di incognite) che sono presenti in un problema statico.

Tecnica delle costruzioni meccaniche Andrea Ferri Sintesi della lezione del 15/11/06 (2h)
VINCOLI NELLO SPAZIO Spesso è necessario collegare due alberi paralleli ma non coassiali, come ad esempio un albero motore con un utilizzatore; si usa per tale scopo un giunto universale che ha molteplicità 1, in pratica esercita un momento parallelo all’asse dei due alberi: -GIUNTO ELICOIDALE:Vincolo che esiste solo nello spazio,trasforma il moto da rotatorio in traslatorio sfruttando superfici elicoidali secondo la seguente relazione:
( 1)2
k Sn P
θπ= −
⋅
k è l’indice di forma,può essere 0 oppure 1. Se k=0 la vite si dice destra e, preso un opportuno riferimento assiale,θ ed S sono equiversi. Se k=1 la vite è sinistra e si avranno θ ed S non equiversi. Generalmente si ha n=1 e k=0.
In cui θ è l’angolo di rotazione in radianti, S lo spostamento assiale,P il passo cioè la distanza tra 2 punti omologhi successivi, n il numero dei principi e rappresenta l’avanzamento della vite dopo un giro completo.
Potrebbe sembrare una cerniera completa assialmente libera (2 forze e 2 momenti),tuttavia i filetti permettono alla vite di traslare solo se essa ruota. Fissato z come asse della vite si ha un rapporto tra
ZF ed ZM dato da:
2 ( 1)KZ ZM Fπ⋅ + − ⋅ ⋅ = 0nP con il significato delle lettere espresso sopra.
Quindi ho ZF ed ZM ma essendo dipendenti la Molteplicità di questo vincolo è 5. Operativamente nello schema preliminare il verso delle forze e dei momenti non assiali possono essere messi a caso,mentre per ZM ed ZF bisogna avere più cura: se la vite è destra ZF ed ZM sono opposti: ZM W S Vite Destra: Vite Sinistra : ZM T ZF R ZF STATICA DELLE STRUTTURE Consiste nello studio non più di un solo corpo rigido, ma dell’insieme di più corpi connessi tra loro. Ci sono vincoli esterni (coppia azione-reazione scambiata da un corpo col telaio) e vincoli interni(coppia azione-reazione scambiata tra due corpi della struttura). Nel primo caso l’interesse

sarà relativo alle sole forze applicate sul corpo, mentre nel secondo caso dovranno essere valutate tutte le forze in quanto scopo della statica è tracciare il FBD di ogni corpo componente la struttura per poi trarne le valutazioni del caso. Le principali forze agenti sulla struttura sono di: -volume (peso, inerzia), -superficie (vento…) tra queste le azioni di contatto (reazioni vincolari esterne ed interne…), Compito della struttura è di prendere il carico in un punto e trasferirlo al telaio. Detto N il numero dei gradi di libertà(ogni corpo rigido nel piano ha 3 DOF), si liberano i corpi dai vincoli e si calcolano. I DOF rappresentano il numero minimo di coordinate lagrangiane che bisogna dare per identificare univocamente la posizione di un corpo nel piano o nello spazio;il numero di tali coordinate può però diminuire in presenza di vincoli come ad esempio le cerniere. Nel FBD bisogna togliere i vincoli e separare i corpi per evidenziare quale coppia di azione-reazione agisce su ogni corpo: R A A R → F F S G T Arco a 3 cerniere non allineate.
H V
Una struttura è in equilibrio quando lo sono tutte le sue parti. Esse sono tante quante sono i sottoinsiemi in cui è possibile dividere la struttura, cioè
2n −1 1, ovvero possibili corpi in equilibrio. 2n −In realtà si scompone la struttura in componenti elementari e si considera l’equilibrio delle singole n parti.

Tecnica delle costruzioni meccaniche Cosmo Valente Lezione del 16/11/06 (1h)
Nell’ultima lezione si è visto cos’è una struttura, intesa come un aggregato di corpi estesi, e definito il suo equilibrio (dal principio di Eulero). A questo punto possiamo servirci di un esempio concreto a cui applicare il metodo di esclusione standard ed introdurre un semplice procedimento con il quale risolvere tutti i nostri problemi. Prendiamo a modello cosa accade se applichiamo una determinata forza su uno dei due corpi che compongono un arco a tre cerniere (quindi i corpi sono incernierati tra di loro e con il telaio). Per prima cosa dobbiamo separare la struttura in corpi indipendenti, nel nostro caso saranno soltanto due, e rappresentare il loro diagramma di corpo libero, naturalmente avendo l’accortezza di rappresentare tutti i carichi presenti e sostituire i vincoli con le corrispettive azioni statiche (da ricordare l’uso del terzo principio che per vincoli interni diventa significativo). In seguito possiamo, conoscendo le forze agenti su ogni elemento rigido, imporre le equazioni cardinali per ogni corpo, scegliendo le componenti in modo comodo, infatti si ha la possibilità di usare sistemi di riferimento differenti. Allora il sistema risolvente sarà unico in quanto le azioni agenti sui vari corpi sono mutue e dipendono le une dalle altre; tale sistema avrà numero di equazioni uguale al numero di gradi di libertà , inoltre, per comodità, è solito portare al secondo membro i carichi. Quindi vediamo che nel nostro problema, dal “conto della serva”, i sei gradi di libertà sono in ugual numero delle incognite, e questo solitamente è di buon auspicio per la risoluzione del problema. A questo punto, dopo la discussione del sistema, spesso fatta in modo sintetico, si giunge alla soluzione. Naturalmente la ricerca di una soluzione non deve procurare difficoltà eccessive, infatti solitamente si utilizza il calcolatore, ma l’aspetto più importante diviene interpretare in modo corretto la soluzione trovata. Esaminiamo a questo punto cosa è accaduto nell’arco a tre cerniere: attraverso semplici calcoli siamo giunti a un’unica soluzione, e questo indica che i vincoli sono in un numero tale, precisamente il minimo, da assicurare l’equilibrio. Riportiamo il procedimento per analizzare qualsiasi successivo problema. Andiamo a scrivere il sistema in forma matriciale Ax=P, con la matrice A avente M colonne, dove M sono le caratteristiche geometriche, e N righe, ovvero i gradi di libertà, che moltiplicata per x, la collezione delle reazioni vincolari deve equivalere a P, il vettore che contiene le informazioni di geometria dei carichi; così sarà sufficiente (dal teorema di Rouché Capelli) l’analisi del rango (dimensione del più piccolo dei minori avente determinante diverso da zero) della matrice A e della matrice A+P, che chiameremo B, per comprendere la tipologia del problema. Infatti avremo soluzione se esiste almeno una M-upla di valori di x tale che Mx=P, e questo accade quando il rango di A è uguale al rango di B. Quindi consideriamo i vari casi:
• se rgA=rgA=M allora ci sono M equazioni di equilibrio linearmente indipendenti, quindi la soluzione è unica e il problema si definisce isostatico (come nel nostro caso prima visto).
• se M=rgA<rgB allora il sistema è impossibile, la struttura non è equilibrata e il problema è ipostatico o labile; per avere un esempio basterà prendere il problema prima preso in considerazione e sostituire a una cerniera un carrello, così da avere un meccanismo. In questo caso il problema potrà essere affrontato in due modi differenti: come un problema del secondo tipo, cercando una nuova configurazione di equilibrio, altrimenti dovrò studiarlo dinamicamente.
• se M>rgA allora il sistema è indeterminato, quindi si hanno più reazioni vincolari di quanti sono i gradi di libertà, perciò il sistema è sovravincolato, iperstatico.

Tecnica delle costruzioni meccaniche Arrighi Nicola Sintesi della lezione del 20/11/06 (2h)
N = 3 M = 2 A = B = ⎪⎩
⎪⎨
⎧
=⋅−=−=+
000
LTPSFT
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
− 01001
L ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−
−
001001
LPF
DetB = -L·F - DetB ≠ 0 → F=0 → rB = 2 = rA = M → ISOSTATICO
- DetB = 0 → F≠0 → rB = 3 ≠ rA = 2 → LABILE (3-2=1 volta)
Si tratta quindi di un problema che a seconda del carico può essere isostatico o labile.
________________________________________________________________________________
N = 3 = M A = B =⎪⎩
⎪⎨
⎧
=⋅⋅=⋅+=⋅−
000cos
ααα
senRLRsenSRT
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⋅−−
ααα
senLsen
0010
cos01
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⋅− 0000100cos01
ααα
senLsen
DetA = -L·senα
- DetA ≠ 0 → senα≠0 → rA = 3 = rB = M → ISOSTATICO
- DetA = 0 → senα=0 → rA = 2 = rB → IPERSTATICO
Per senα≠0, cioè se l’azione statica di appoggio non è orizzontale, il problema è isostatico indipendentemente dai carichi, si parla in questi casi di sistema intrinsecamente isostatico. Per senα=0 invece il sistema è non isostatico cioè in generale labile o iperstatico, dipende dai carichi. In questo caso è isostatico perché il carico è nullo.
________________________________________________________________________________

Risolvendo per sostituzione il sistema ottengo 2 uguaglianze potenzialmente contradditorie:
⎪⎩
⎪⎨⎧
⋅=
=
αsenPWW
2
0
- sen α ≠ 0 → →
P non orizzontale → LABILE
- senα = 0 → →
P orizzontale → IPERSTATICO
Non è immediato che il sistema possa essere labile, cerchiamo di giustificare il risultato:
1Ldyd =θ
1221)11(11
21
111)cos(
1 222
2 LdydLdL
dLL
dLdL
⋅=⋅=−+⋅=
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
−−
⋅=−=θθ
θθ
Per muoversi le aste devono allungarsi. L’allungamento per piccoli spostamenti è infinitesimo del secondo ordine quindi trascurabile rispetto al moto verticale dy. Tale allungamento nella realtà è consentito dalla deformazione del materiale o comunque dall’inevitabile gioco dei perni delle cerniere dell’arco. Infatti, se ad esempio L1 = 1m e dy = 1mm → dL = 1μm < minima tolleranza tecnologicamente realizzabile(≈10μm). Inoltre, la cinematica ci dice che il perno della cerniera centrale è vincolato a percorrere due traiettorie circolari tangenti, quindi i due vincoli non sono incompatibili per piccoli spostamenti.
________________________________________________________________________________
N = 3 M = 4 ⎪⎩
⎪⎨⎧
−=
==
VK
PWS2 → IPERSTATICO (1 volta)
K e V sono indipendenti dal carico, in realtà, possono derivare da errori di montaggio o da effetti termici. Se si escludono questi effetti K = V = 0 .

Tecnica delle costruzioni meccaniche Andrea Sovani Sintesi della lezione del 22/11/06 (2h)
STRUTTURE INTRINSECAMENTE ISOSTATICHE Nella totalità dei problemi di tipo isostatico si incontrano a volte casi di particolare rilevanza: le strutture intrinsecamente isostatiche, cioè quelle strutture che sono classificabili come problemi di tipo isostatico qualunque sia il carico a cui sono soggette. Di seguito sono riportati alcuni esempi di strutture di questo tipo poiché nell’analisi di strutture reali ci possiamo trovare di fronte a varianti o ad aggregazioni di esse: in questi casi ricorriamo all’uso di queste strutture “elementari” per la classificazione di problemi più complessi. NEL PIANO: I) CERNIERA +APPOGGIO II) II) TRE APPOGGI Se la retta d’azione del vincolo di appoggio Se le rette d’azione dei tre appoggi non non passa per il centro della cerniera convergono tutte in un unico punto (proprio o improprio) III) DOPPIO PENDOLO+APPOGGIO IV) ARCO A TRE CERNIERE NON ALLINEATE
Se la retta d’azione dell’appoggio non Come si è visto nelle lezioni precedenti è parallela alle biellette del bi-pendolo
V) INCASTRO (Sia nel piano che nello spazio) NELLO SPAZIO: I) CERNIERA COMPLETA +APPOGGIO II) SEI APPOGGI Se la retta d’azione dell’appoggio non ha punti (propri o impropri) in Se le direzioni delle rette d’azione non hanno punti in comune comune con l’asse della cerniera III) CERNIERA SFERICA+ CERNIERA PIANA NELLO SPAZIO+APPOGGIO Se l’asse delle cerniere (centrate in punti distinti) non ha punti in comune con la retta d’azione del vincolo
Le strutture intrinsecamente isostatiche sono particolarmente importanti nella tecnica e spesso vengono utilizzate in fase di progettazione principalmente per due motivi: I)le reazioni vincolari non sono influenzate da errori di montaggio o da effetti termici, ma dipendono solo dal carico; II)la struttura mantiene sempre la configurazione data qualunque carico vi sia applicato, quindi la sua configurazione non risente di carichi variabili nel tempo;
Per un albero un montaggio intrinsecamente isostatico è data dal fissaggio con due cuscinetti orientabili di cui uno bloccato assialmente (ovviamente l’albero ha un g.d.l. nello spazio, cioè ruota attorno al suo asse). In alcuni casi (per esempio nelle macchine utensili) si ha necessità di un montaggio iperstatico sia perché nella realtà l’albero non è infinitamente rigido né infinitamente resistente sia per far sì che l’albero ruoti perfettamente attorno al suo asse anche sotto carichi particolarmente gravosi. Si possono allora aggiungere cuscinetti altri orientabili. Nei montaggi iperstatici però bisogna fare attenzione sia agli errori di montaggio sia agli effetti termici, per evitare che l’albero sia caricato in fase di montaggio più che nelle condizioni di lavoro. Per ovviare ciò bisogna ricorrere a tolleranze strette oppure a sistemi di regolazione. Entrambe le soluzioni comportano però una lievitazione dei costi, quindi in generale vanno evitati se non necessari ricorrendo a strutture intrinsecamente isostatiche.
RISOLUZIONE DI ALCUNI PROBLEMI DI STATICA DELLE STRUTTURE I) Si ha un arco a tre cerniere non allineate vincolato tramite un incastro al telaio, quindi la struttura è
intrinsecamente isostatica. Dopo aver visto ciò si risolve direttamente il problema senza stare ad analizzare i ranghi delle matrici A e B.
II) In B ci sono due cerniere (molt.=4).
M=11e N=12 : il problema sembra labile (in effetti lo è). Abbiamo un arco a tre cerniere non allineate che, come sappiamo, è un corpo rigido. Affinché il problema sia isostatico bisogna che non ci sia nessuna forza che produca una rotazione attorno a B, ma come si vede dalla figura questo non avviene quindi nella configurazione indicata non c’è equilibrio.
III) In questo caso il problema è isostatico (non intrinsecamente però), poiché F non produce momento
rispetto al punto B. Nella risoluzione bisogna fare attenzione ai vincoli in B poiché ho una cerniera doppia quindi 4 incognite.
IV) M=7 e N=6 : il problema sembra 1-volta iperstatico, però si tratta di un’iperstaticità particolare. Infatti si
possono calcolare le reazioni vincolari all’incastro (reazioni esterne) mentre non si possono conoscere le reazioni vincolari delle due cerniere (reazioni interne). Problemi di questo tipo si dicono internamente iperstatici ed esternamente isostatici. Da notare che errori di montaggio delle cerniere non hanno alcun effetto sulle reazioni vincolari prodotte dall’incastro.
V) In questa configurazione il problema è sia internamente che esternamente iperstatico.

SINTESI DEGLI ARGOMENTI PRINCIPALI DI STATICA DELLE STRUTTURE Nella risoluzione di un problema di statica delle strutture si parte dall’ipotesi più semplice possibile, cioè che il problema sia del I tipo e che stia in equilibrio nella configurazione data. Successivamente si fa il calcolo di N ed M (il cosiddetto “conto della serva”), il quale però è solo indicativo e non risolutivo in quanto non tiene conto della posizione in cui sono applicati i carichi e del fatto che i vincoli possono non essere indipendenti. Sono particolarmente importanti le strutture intrinsecamente isostatiche, come abbiamo appena visto. Per la classificazione del problema abbiamo due casi: I) Struttura nuova (mai incontrata cioè dal risolutore del problema): in questi casi la cosa migliore da fare è la risoluzione col metodo standard II) In molti casi si possono ricondurre strutture complesse ad aggregazioni di strutture intrinsecamente isostatiche delle quali si conoscono già
le caratteristiche statiche • PROBLEMI ISOSTATICI: le reazioni vincolari dipendono linearmente dai carichi, cioè se si raddoppiano i carichi raddoppiano anche le
reazioni vincolari, così come se non c’è carico le reazioni vincolari valgono zero. Nei problemi isostatici errori di montaggio (naturalmente senza esagerare) ed effetti termici possono essere trascurati poiché non producono effetti sulle reazioni vincolari.
• PROBLEMI IPOSTATICI: la struttura non può stare in equilibrio con la configurazione e con i carichi assegnati. A seconda delle richieste del problema posso procedere in due diversi modi:
I) Si risolve il problema come se fosse del II tipo, cioè si cerca una configurazione nel quale il problema possa essere isostatico II) Si tratta il problema dinamicamente, cioè si tiene conto delle accelerazioni subite dal corpo. Se si utilizza un sistema di riferimento solidale
con la struttura il problema diventa intrinsecamente isostatico, devo però introdurre le forze d’inerzia. • PROBLEMI IPERSTATICI: la risoluzione di questo tipo di problemi può essere effettuata solo attraverso considerazioni sulla deformabilità dei
corpi. E’ importante ricordare che strutture di questo tipo sono particolarmente sensibili a errori di montaggio o ad effetti termici. STRUTTURE RETICOLARI Si dicono strutture reticolari piane quelle strutture formate da corpi rigidi nel piano collegati al telaio e tra di loro attraverso cerniere (due per ogni corpo) e alle quali siano applicati carichi solo nei centri delle cerniere (detti “nodi”).In particolare il peso dei corpi deve essere trascurabile. Generalmente gli elementi sono aste o barre di geometria rettilinea, per il procedimento di soluzione però la forma non è importante
Il corpo 1 è soggetto solo a due forze, ciascuna delle quali applicate in un nodo. Affinché il sistema sia in equilibrio le due forze devono essere una coppia di braccio nullo, la cui retta d’azione deve passare per il centro delle due cerniere.
Per convenzione si prende come positiva la reazione vincolare la cui coppia è divergente, si usa il segno negativo invece se la coppia è convergente.
A questo punto si può risolvere il problema semplicemente trattando l’equilibrio del perno della cerniera in B.

Tecnica delle costruzioni meccaniche Panettieri Enrico Sintesi della lezione del 23/11/06 (1h)
P
2
1 3
4
5
6
7
8
10
9
2P
AB
C
D
E
F
G Analizziamo questa struttura reticolare in cui le cerniere (lettere v.disegno) sono disposte in modo da formare triangoli equilateri. Si nota che è una struttura intrinsecamente isostatica poiché formata da una serie di archi a tre cerniere non allineate. La struttura presenta 10 corpi che, per semplicità grafica, sono stati schematizzati con linee (potrebbero avere una forma qualsiasi).
Ipotizzando che siano corpi infinitamente rigidi,questi singolarmente presentano 3 DOF. Avremmo quindi 30 DOF in totale ( N = 30 ),la presenza delle 7 cerniere ci porta a considerare 30 vincoli in totale (M = 30);si noti che in A e in G vi sono due cerniere, in C ed F si hanno cerniere doppie e in tutte le restanti cerniere sono cerniere triple. Risolvendo la struttura secondo il metodo standard avremo un sistema 30 x 30. Con il metodo dei nodi siamo in grado di ridurre le incognite a 10,nonostante ciò all’interno di questo sistema potrebbero comparire equazioni accoppiate che ci porterebbe all’ulteriore risoluzione di sottosistemi. Ci chiediamo se sia possibile semplificare la risoluzione di strutture reticolari. Metodo delle Sezioni Tale metodo si può utilizzare quando con un taglio (ideale) si interrompono non più di 3 corpi e in una delle due parti ottenute si hanno solo carichi (cioè forze note). Vediamo la sua utilità con la struttura precedente.
P
2
1 3
A B
C
N6
N5
N4( D )
Eseguiamo un taglio lungo BC; nella struttura 1-2-3 è presente il carico P noto,dato che la struttura è in equilibrio allora ogni sua parte sarà anch’essa in equilibrio. Le forze N4, N5, N6 sono le forze esercitate dai corpi a cui la parte tagliata era connessa. Avremo 3 equazioni e 3 incognite. C’è un ulteriore metodo per evitare che vi siano equazioni accoppiate. Un’equazione deriva dal momento risultante rispetto al polo B (equazione con la sola incognita N4 ), un’altra equazione si ottiene calcolando il momento risultante rispetto al polo ottenuto come intersezione delle rette d’azione di N5 e N4, ottenendo quindi un’equazione con sola incognita N6. Infine non rimane che ricavare un’equazione con incognita
N5 per cui si calcola la risultante lungo la verticale (dove N4 e N6 sono uguali a zero). Avremo così 3 equazioni in 3 incognite tutte disaccoppiate.Quindi detta A X = P l’equazione vettoriale risolvente, la matrice A sarà una matrice diagonale.

Tecnica delle Costruzioni Meccaniche Attilio Mirijello Sintesi della lezione del 27/11/2006 (2h)
1. Efficienza delle Strutture Reticolari
2P
2P
2P
2P
p
b
p
Fig.1
B A
a a
Nella statica, l’analisi di un problema di una struttura reticolare, impone un sostanziale vantaggio sul piano computazionale. La classificazione di una struttura, quale reticolare piana, costituita da n elementi reticolari, permette infatti, di ridurre il numero di incognite da 3n a n.
Sono però molto frequenti le strutture definibili come parzialmente reticolari, in quanto composte da almeno un elemento non reticolare, ovvero caricato in punti differenti dalle sue estremità. Per esempio in fig.1 gli elementi A e B, aventi entrambi massa M , sono soggetti, in seguito a ragionevoli considerazioni, alla distribuzione lineica della
forza peso agMp = (con risultante gMP = ), la
quale ripartita uniformemente sulle barre, non permette di considerarle quali elementi reticolari. Al fine di godere dei benefici della reticolarità è possibile sostituire, modificando il problema, al posto della distribuzione della forza peso, un sistema ad esso staticamente equivalente. Gli effetti di tale modifica verranno percepiti solamente all’interno del corpo sul quale verrà applicata; il suo equilibrio, infatti, rimarrà inalterato, da cui anche l’equilibrio complessivo della struttura. Da ciò, è possibile osservare che le azioni locali su un elemento reticolare derivano solamente dal suo peso, mentre le reazioni vincolari dalle azioni statiche complessive impresse alla struttura. Risulta quindi evidente che gli effetti prodotti da una tale modifica sono tanto più trascurabili, quanto più complessa è la struttura considerata.
A
kj
i
ji
A Fig.2a
Fig.2b
La risoluzione di una struttura, identificata reticolare, può essere affrontata solo dopo averla classificata come labile, isostatica o iperstatica. Osservazioni • Considerata la struttura reticolare in fig.2a: due elementi
i e j uniti dal nodo A scarico; se i due elementi reticolari giacciono su diverse rette d’azione, si ha: 0== jNiN
con e forze vincolari applicate ai due corpi. iN jN
• Preso un nodo scarico A, fig.2b, se in esso convergono tre elementi i, j, k, dei quali i e j giacenti sulla medesima retta d’azione differente da quella di k, seguirà che: e jNiN = 0=kN
Operativamente tali osservazioni permettono di semplificare strutture reticolari, riducendo gli elementi di cui è costituita.

2. Strutture Reticolari Spaziali Il vantaggio apportato da una struttura reticolare, nella risoluzione di un problema di statica piana, è altrettanto tangibile per un problema di statica spaziale. Una struttura reticolare spaziale, permette infatti, di ridurre il numero di incognite di una struttura di n elementi da 6n a n. E’ possibile realizzarla tramite l’assemblaggio di elementi rigidi, definiti elementi reticolari, collegati tra loro ed al telaio con cerniere sferiche. Visto inoltre, che nel piano è facilmente possibile realizzare strutture intrinsecamente isostatiche con la ripetizione di un modulo elementare quale l’arco a tre cerniere non allineate, nello spazio il modulo ad esso equivalente è il Tetraedro non degenere (fig.3). Quest’ultimo è tale che i vettori , , sono linearmente indipendenti. Analizzando la struttura è possibile osservare che:
BA1 BA2 BA3
1532331863
=⋅+⋅==⋅=
MN
1A
PB
3A2A
Fig.3
L’apparente labilità, è giustificata dal fatto che ogni corpo rigido è libero di ruotare intorno all’asse delle cerniere sferiche ad esso collegate, movimento questo, che non può essere impresso da una coppia di braccio nullo, alla quale è soggetto per l’ipotesi di elemento reticolare. Di conseguenza in quanto reticolare è isostatica.
2. Principio dei Lavori Virtuali (Virtual Work) L’approccio alla risoluzione di problemi di Meccanica può essere indirizzato lungo due strade: • Metodo Differenziale: considera l’equazione fondamentale della
Meccanica ; amF =• Metodo Variazionale o Energetico: il calcolo del lavoro porta a
considerazioni energetiche. Quest’ultimo è basato sul Principio dei Lavori Virtuali: in un sistema in equilibrio statico, il lavoro virtuale, compiuto da tutte le forze agenti
per qualunque spostamento virtuale dei suoi punti, è nullo. Intendendo con spostamento virtuale uno spostamento che: a. non modifichi le caratteristiche delle forze agenti; b. compatibile con i vincoli. L’applicazione di tale principio permette di ottenere una soluzione mirata, e per tale motivo molto più comoda in determinati casi.
L
m
ϑ
Fig.4
Si analizzi il caso di un problema piano: Pendolo Semplice (fig.4). Supponendo di essere in una configurazione di equilibrio, πϑϑ =∨= 0 , e di imprimere uno spostamento virtuale Pδ , in tal caso una rotazione virtuale δϑ , ad esso corrisponde un lavoro complessivo fatto dalle forze agenti nullo,
essendo il movimento della massa m, perpendicolare ad entrambi le forze, come è possibile osservare nello schema di corpo libero riportato. Considerando, invece, un’altra posizione qualunque del pendolo è facile osservare che il lavoro totale delle forze agenti è uno scalare non nullo: δϑϑδ ⋅⋅−= sinmgLL , confermando di conseguenza il fatto che quella considerata non è una configurazione di equilibrio.
mg
T

Tecnica delle costruzioni meccaniche Gianluigi Sem– Sintesi della lezione del 29/11/2006 (2h)
Fino ad ora, di fatto, non abbiamo mai considerato le forme degli elementi strutturali. Nel modello del punto materiale, per definizione, la forma non è influente ed è trascurabile; essa è altresì ininfluente nel modello di corpo rigido, se non per determinare l’appartenenza al corpo di alcuni punti dello spazio. Se vogliamo analizzare il corpo reale, dobbiamo invece considerare la forma effettiva dell’oggetto. Ideare e disegnare la forma di un corpo è parte fondamentale del lavoro del progettista, il quale identifica una collezione intelligente di misure (quote), il cui insieme definisce compiutamente la forma geometrica reale del corpo. Stabilire le caratteristiche geometriche fondamentali di un oggetto è elemento centrale per la progettazione e per le verifiche strutturali (altrimenti anche solo il calcolo delle reazioni di un perno in un albero motore sarebbe alquanto complesso). Per riuscire nella non banale impresa è necessario imparare a fare modelli strutturali efficaci e fisicamente sensati, seguendo un metodo coerente, modellando gli oggetti secondo schemi definiti e semplici, coscienti che non sempre l’utilizzo, più o meno smodato, di calcolatori può portare a soluzioni con un buon compromesso di tempo, denaro e qualità. Aspetto di fondamentale importanza per lo studio della forma di un oggetto è l’identificazione del numero di dimensioni dello stesso. E’ ovvio che qualsiasi oggetto esistente nel mondo reale possiede tre dimensioni spaziali, ma si può (o meglio, si deve) semplificare, laddove sia possibile, il modello di corpo tridimensionale a corpo bi o monodimensionale, a seconda che due o una delle tre dimensioni predominino sulle restanti. MODELLI TRIDIMENSIONALI I modelli tridimensionali sono usati per oggetti in cui nessuna delle tre dimensioni predomina sulle altre, come ad esempio teste di pistoni o testate di motori. Questo è il caso più difficile da schematizzare, e la risoluzione dei problemi presenta talvolta difficoltà tali da rendere impossibile una procedura risolutiva esclusivamente manuale. MODELLI BIDIMENSIONALI I modelli bidimensionali si usano per oggetti con forma tale che una dimensione, chiamata spessore, è trascurabile rispetto alle altre due (ad esempio le pale di una turbina, la scocca di un veicolo, la carena di una nave). L’utilizzo di tali modelli genera inevitabilmente errori; è intuitivo che tali errori saranno tanto minori, e quindi le nostre previsioni migliori, quanto più lo spessore è trascurabile. Un oggetto bidimensionale è descrivibile caratterizzando una superficie media e uno spessore.
Preso un generico punto S appartenente ad una superficie, considerata superficie media dell’oggetto, si identificano le sue coordinate nello spazio (xs, ys, zs), utilizzando due parametri (λ;μ), definiti su un dominio di R2.
.S z
x
y
xs = xs (λ;μ) (1) ys = ys (λ;μ) zs = zs (λ;μ)
Le equazioni (1) sono pertanto le equazioni parametriche di un generico punto S della superficie considerata, e identificando la posizione di un qualsiasi punto della superficie, identificano quest’ultima univocamente. La superficie risulta continua se le (1) sono continue, differenziabile se per ogni punto S è possibile determinare un piano ad essa tangente, derivabile due volte se le (1) ammettono come derivata una funzione continua. Se la superficie considerata è una funzione tridimensionale è possibile caratterizzarla a partire dalle (1) con la sua parametrizzazione cartesiana, ad esempio zs = f (xs;ys). Considerando sempre un generico punto S della superficie, si definisce la funzione (2) h = h (λ;μ), o, in forma cartesiana, h = g (xs;ys), che identifica lo spessore, ovvero l’estesione del segmento normale alla superficie nel punto determinato, simmetrico rispetto a S. Tale spessore h deve essere “piccolo” rispetto alle quantità geometriche che definiscono la superficie localmente, in generale rispetto ai raggi di curvatura della superficie. Un solido bidimensionale è quindi interamente definito con le funzioni (1) e (2), o con le loro equivalenti cartesiane. Per quanto concerne la regolarità delle suddette funzioni, non possiamo pretendere che esse siano sempre derivabili e differenziabili quante volte vogliamo. E’ necessario quindi ammettere anomalie, come per esempio discontinuità, discontinuità di derivata e irregolarità di spessore, ma solo ad una condizione: tali anomalie devono essere definite da un insieme di area nulla (punti isolati o linee), ovvero in un dominio di punti di estensione trascurabile rispetto alla superficie considerata “buona”. I solidi bidimensionali si possono classificare in base alle proprietà della superficie media, dello spessore, e in base alle sollecitazioni.
• LASTRE o MEMBRANE (Membranes): caratterizzate da una superficie media piana, sono sollecitate soltanto da azioni giacenti sul piano medio, o simmetriche rispetto allo stesso;
• PIASTRE (Plates): caratterizzate da una superficie media piana, sono sollecitate trasversalmente rispetto al piano medio (ad esempio sono piastre i trampolini, il solaio, i fondi delle botti);
• GUSCI (Shells): li caratterizza una superficie media non piana. Possono essere sollecitati da azioni membranali (tangenti al piano medio) o trasversali (perpendicolari al piano tangente al punto considerato del piano medio). Sono gusci i profili alari, le fusoliere, le scocche, i parafanghi.
MODELLI MONODIMENSIONALI I modelli monodimensionali si adattano ad oggetti in cui una dimensione è predominante rispetto alle altre due. Tali oggetti sono generati da una figura piana (sezione) che si muove in modo che il suo baricentro descriva una linea che rimane costantemente perpendicolare alla sezione stessa, e sono detti travi. Definiremo in seguito sezione e baricentro.

Esempi di travi sono il calamo delle penne degli uccelli, gli elementi del telaio delle biciclette, diverse ossa del corpo umano (ad esempio il femore). Come è evidente da quanto appena detto, un osso del corpo umano può sembrare “meno trave” di un’asta di metallo, ma ricordiamo che l’accezione “trave” rappresenta un modello matematico, al quale si ricorre per descrivere fenomeni fisici, coscienti della possibile presenza di incertezze derivanti dalla più o meno grande inadeguatezza del modello stesso. Riguardo a questo possiamo riportare l’esempio della prova di rigidezza torsionale (caratteristica specifica, come vedremo, delle travi), prova che viene effettuata sugli autoveicoli bloccando l’asse posteriore e sottoponendo quello anteriore a forze di varia natura. In teoria risulta quantomeno bizzarro poter pensare dotata di asse una di quelle nuove macchine la cui forma è assimilabile più che altro ad un cubo.
Definiamo diametro d della trave il massimo della distanza tra tutte le coppie di punti della sezione. Identifichiamo il baricentro G (centroid) come una proprietà geometrica della sezione calcolabile in maniera univoca. Possiamo quindi individuare una coppia di assi baricentrici che hanno un particolare significato per quanto riguarda le caratteristiche d’inerzia (assi principali d’inerzia, due o infiniti a seconda della forma dell’ellisse principale d’inerzia). Immaginando ora di spostarci perpendicolarmente alla superficie di sezione cambiando la forma in maniera graduale, identifichiamo così una linea d’asse, linea a cui ad ogni punto si associa una sezione il cui punto d’asse è il baricentro. In
coordinate parametriche: OG = (f1(λ) f2(λ) f3(λ))T. Questa linea d’asse si denominerà frequentemente come Γ. Si ricorre inoltre a una funzione del tipo Ω(λ) per determinare univocamente al variare del parametro λ la forma geometrica della sezione e così le sue proprietà geometriche.
d G
z y
x O
Per identificare sia la linea d’asse che la sezione è possibile utilizzare una parametrizzazione naturale: si sceglie un’origine sulla linea d’asse, un verso di percorrenza e si usa così l’ascissa curvilinea s. In questo caso avremo come equazioni che identificano univocamente la trave: Γ(s) ; Ω(s). Le travi si possono classificare in base all’asse o alla sezione (che può essere uniforme, ovvero costante al variare di s, o variabile)
Rettangolare o Cassone (Box) Quadrato (Square box)
Circolare
HTAperta Piattabanda (Flange)
Doppio T o I
Anima (Web)
SEZIONE (Uniforme)
ASSE
RETTILINEO (calamo)
CURVILINEO PIANO (sciabola)
GOBBO (molla a elica)
Affinché una sezione sia variabile basta che una sola proprietà di Ω dipenda da s. Ad esempio se consideriamo un lunga punta di un trapano essa è una trave a sezione variabile: sebbene la sezione mantenga costantemente le sue dimensioni, variano le direzioni principali d’inerzia. Se sono presenti lungo la trave discontinuità (ad esempio un cambio brusco di diametro, supponiamo in un punto A), per fare una stima del comportamento dell’oggetto in quel punto, si trascurano i possibili raccordi nel suo intorno (per coerenza stessa col modello assunto, ovvero quello di trave, dove già il diametro è considerato di dimensioni trascurabili rispetto alla lunghezza), e si attribuiscono ad A due sezioni, limite sinistro e limite destro in A di Ω(s). Al momento della verifica della resistenza strutturale si considerano quindi entrambe le sezioni, consapevoli che, essendo zona critica e avendo fatto notevoli approssimazioni, i risultati saranno affetti da significativo errore. Possono esserci anche travi con anomalie d’asse e di sezione, come ad esempio una trave dritta di sezione circolare, che ad un certo punto cambia direzione, cambiando pure la sezione in rettangolare. Come nel caso precedente si considerano i due limiti sinistro e destro di Ω(s) per s che tende al punto A di discontinuità (in questo caso composta) da sinistra e da destra.

TECNICA delle COSTRUZIONI MECCANICHE Varelli Lorenzo - Lezione 04/12/2006
p
F
L’elemento strutturale ha la funzione di trasmettere le azioni esterne al telaio. Lo scopo è analizzare le caratteristiche di sollecitazione di ogni sezione dell’elemento strutturale in modo da individuare quella sottoposta a sollecitazioni maggiori (CRITICA) ed eseguire verifiche di resistenza.
Per analizzare una sezione idealizziamo il problema supponendo che ogni sezione sia legata alle adiacenti attraverso un vincolo interno di incastro. Operando un taglio ideale in corrispondenza della sezione generica C (quindi rimuovendo il vincolo di incastro interno) otteniamo il diagramma di corpo libero delle due sottotravi.
Le azioni rappresentate sono astrazioni ed in realtà rappresentano in maniera staticamente equivalente rispetto al baricentro della sezione le complicate distribuzioni di interazione elettromagnetica che si hanno sulle due facce prodotte dal taglio.
+C
−C
Eseguendo un ingrandimento a livello atomico della sezione in analisi avremmo la situazione seguente (suppongo un reticolo cristallino cubico per semplicità)
Prima del taglio gli atomi interagiscono tra loro attraverso interazioni elettromagnetiche. Tale interazione è massima tra atomi direttamente affacciati tra loro (esempio mn χβ ↔ per n ), mentre diminuisce tra atomi appartenenti a colonne adiacenti ma con diversa riga (esempio
m
α β χ δ1
2
34
5
Taglio
Taglio
ForteMedia
Debole
=
mn χβ ↔ per mn ≠ ).
Le interazioni tra atomi di colonne non adiacenti sono trascurabili perché schermate dalla conformazione stessa del reticolo cristallino (effetto Gabbia di Faraday). In definitiva con il taglio si eliminano interazioni a corto raggio tra atomi direttamente affacciati sulla superficie di separazione, in pratica si elimina una interazione elettromagnetica interna di superficie. -ANALISI DELLA SEZIONE- Il taglio ideale della sezione generica C evidenzia due facce.
Materiale Materiale
Vuoto
szt
n
+ΩC−ΩC
Una volta definiti l’asse z e l’ascissa curvilinea s concordi, convenzionalmente si definisce il versore normale ad ognuna delle due superfici di interfaccia con il verso scelto dal materiale verso l’esterno. A questo punto si definisce faccia positiva quella che presenta il versore
normale concorde con l’asse z, e faccia negativa Ω quella con il versore perpendicolare discorde con z.
+ΩC−
C A questo punto: • se mi riferisco alla faccia ,supponendo di conoscere la distribuzione di forza superficiale agente su tale faccia, calcolo la risultante e il momento risultante rispetto al baricentro, scomponendo poi i vettori nel
+ΩC
sistema di riferimento locale •se mi riferisco alla faccia il procedimento è analogo ma devo invertire di segno le 6 componenti ottenute. −ΩC

RM
RG
x
y z
+ΩC
La risultante e il momento risultante si riducono a NRz ⇒ FORZA NORMALE O ASSIALE (NORMAL OR AXIAL FORCE)
xx TR ⇒ FORZA DI TAGLIO (SHEAR OR TANGENTIAL FORCE)
yy TR ⇒ FORZA DI TAGLIO (SHEAR OR TANGENTIAL FORCE)
zM MOMENTO TORCENTE (TORQUE, TORSIONAL MOMENT)
xM MOMENTO FLETTENTE (BENDING MOMENT)
yM MOMENTO FLETTENTE (BENDING MOMENT)
Da notare che la distribuzione delle pressioni agente sulla sezione C è solitamente incognita. Per ricavare le caratteristiche di sollecitazione di una sezione generica si inizia generalmente l’analisi dal diagramma di corpo libero definitivo della struttura.
TEOREMA Per trovare le caratteristiche di sollecitazione di una generica sezione C, si immagini di effettuare un taglio ideale della struttura in corrispondenza di tale sezione; si avranno così due sottostrutture che chiamiamo (sottostruttura dalla parte delle s crescenti) e (sottostruttura dalla parte delle s decrescenti). A questo punto si definiscono le facce e secondo le convenzioni definite.
+z−z −ΩC
+ΩC
La caratteristiche statiche applicate a sono staticamente equivalenti alle azioni applicate alla sottostruttura
prima del taglio (si possono considerare solo le azioni esterne); viceversa le azioni applicate a sono staticamente
equivalenti alle azioni applicate alla sottostruttura
+ΩC+z
−ΩC−z .
Quindi le azioni agenti su sono staticamente equivalenti alla distribuzione +ΩC p considerata dalla sezione C a B più
la forza F , mentre le azioni su sono staticamente equivalenti alla distribuzione −ΩC p considerata dalla sezione A fino a C più le reazioni vincolari di incastro in A.
p
+z−z+Ω C
−Ω C
FR
SW α
N
yT
xMRSW
p
−z
Riferendosi alla +ΩC
αcosFN =
2lpFsenTy += α
⎟⎠⎞
⎜⎝⎛ +−= αFsenlllpM x 224
Prendiamo un concio infinitesimo di trave Ipotesi: - asse localmente rettilineo (facce del concio parallele) - sul concio non agiscono forze concentrate (sono significative solo le caratteristiche di sollecitazione)
FORZA ASSIALE (TRAZIONE) 0>N 0<N (COMPRESSIONE)
x y
z
x y
z
FORZA DI TAGLIO FORZA DI TAGLIO
0>yT 0>xT
y
z
z
x MOMENTO TORCENTE MOMENTO FLETTENTE MOMENTO FLETTENTE
0>zM 0>xM 0>yM
x y
z
z
y Trazione
neCompressio
z
Trazione
neCompressiox

Tecnica delle costruzioni meccaniche Davide Costa Sintesi della lezione del 6/12/06 (2h)
CONCETTI CHIAVE:
• le sollecitazioni dovute ai carichi, che attraversano una sezione qualsiasi della trave, quando la trave svolge una funzione strutturale, sono interazioni di tipo elettromagnetico a corto raggio che interessano gli atomi di due facce contrapposte a cavallo della sezione.
• il SdR da utilizzare è quello locale fissato sulla faccia definita positiva dalla normale uscente e concorde con l’ascissa curvilinea s.
• dato che le facce contrapposte di una sezione sono due, vale il principio di AZIONE-REAZIONE:
quindi basta studiare le caratteristiche di sollecitazione riferendosi solo a una di esse (quella positiva) perché sono uguali ma opposte a quelle sull’altra faccia (quella negativa). Si può quindi utilizzare qualsiasi faccia e qualsiasi SdR locale purché si faccia attenzione ai segni, ma in generale è comodo utilizzare per convenzione gli elementi (facce, SdR, normali) positivi e concordi con l’ascissa curvilinea s.
DEFINIZIONE OPERATIVA DELLE CARATTERISTICHE DI SOLLECITAZIONE La definizione operativa delle caratteristiche di sollecitazione implica la necessità di dare un metodo che ne consenta il calcolo (o la misura). Bisogna quindi:
1. tracciare il FBD della trave intera. 2. operare idealmente un taglio nella sezione da studiare, suddividendo quindi la trave in due sotto-travi,
una rivolta verso le z positive e una rivolta dalla parte delle z negative. 3. considerare la faccia positiva (quella che ha la normale uscente concorde con l’asse z locale) e
quantificare le azioni statiche che agiscono su di essa. 4. le azioni da considerare sono staticamente equivalenti a quelle che agiscono sulla parte della trave
rivolta verso le z positive, cioè con S>SA. 5. pertanto si deve calcolare RISULTANTE e MOMENTO RISULTANTE di tutti i carichi agenti sulla
sotto-trave, riportando sul SdR locale le loro 6 componenti scalari con segno, cioè 3 componenti di forza e 3 di momento, che sono le CARATTERISTCHE DI SOLLECITAZIONE.
CARATTERISTICHE NEL PROBLEMA PIANO
1. il piano dell’asse deve contenere almeno un asse principale di inerzia della sezione. 2. l’asse deve appartenere al piano 3. i carichi devono essere piani o simmetrici al piano
se il problema è piano solo alcune caratteristiche sono rilevanti; infatti, rispetto al SdR locale possono essere non identicamente nulle solo: la forza normale N, il taglio Ty e il momento flettente Mx. SCHEMA DEL CONCIO DI TRAVE SCARICO
Y
z N
Ty
Mx Mx
N
Ty Lo schema rappresenta le azioni statiche considerate positive rispetto alla faccia positiva del concio e bisogna riferirsi a queste per attribuire i segni effettivi.

Le caratteristiche di sollecitazione servono per determinare le azioni statiche che interessano tutte le sezioni della trave, in particolare quelle che risultano “critiche” cioè maggiormente sollecitate che devono sopportare valori di carichi superiori ai massimi ammissibili per l’integrità della trave. Ci sono quindi funzioni analitiche che descrivono le caratteristiche cioè sono funzioni della ascissa curvilinea s dell’asse e sono N(s), T(s) e M(s); come tali possono essere rappresentate in un grafico che va rappresentato qualitativamente sulla trave stessa e va quotato. ESEMPIO: TRAVE A MENSOLA P
TAGLIO TY
FORZA NORMALE N
Il diagramma del taglio viene convenzionalmente disegnato sotto la trave nel verso concorde dell’asse Y del sdr locale: in questo caso tutti i conci sopportano lo stesso taglio, che è costante e pari a + P
P
TY
Il diagramma della forza normale è costantemente nullo per tutta la lunghezza della trave
MX
-PL
MOMENTO FLETTENTE MX
Il diagramma del momento flettente va disegnato per convenzione dalla parte delle fibre tese;il momento va da un valore minimo 0 ad un valore massimo -PL
Le sezioni più critiche sono quelle che devono sopportare valori massimi delle caratteristiche oppure hanno i valori minimi delle proprietà geometriche. Esiste una relazione fra taglio e momento ben visibile anche graficamente:
• dove il taglio ha modulo maggiore, il diagramma del momento ha pendenza maggiore • dove il taglio fa uno scalino, il momento ha un punto angoloso • dove il taglio è costante, il momento è lineare • dove il taglio cambia segno, il momento cambia pendenza

Tecnica delle costruzioni meccaniche Gabriele Benigni - Sintesi della lezione del 07/12/06 (1h)
Vogliamo studiare le relazioni che intercorrono tra le caratteristiche di sollecitazione. Per far questo consideriamo un caso generale nel piano per una trave con asse rettilineo, almeno localmente.
Esaminiamone un concio infinitesimo sul quale non agiscono carichi concentrati; su di esso agiscono solo forze di volume o forze di superficie che noi riportiamo sull’asse dato che consideriamo la trave un solido monodimensionale. Nel caso più generale possibile, sull’asse del concio di lunghezza infinitesima ds possono agire i carichi per unità di lunghezza p(s) e q(s) e m(s). I momenti per unità di lunghezza risultano di scarso interesse pratico: difficilmente si riscontra una trave con un momento significativo distribuito sull’asse (un esempio potrebbe essere una trave posta fra una serie di mole che grattano sulle due superfici opposte di essa).
Sulle due facce parallele del concio ci saranno poi le caratteristiche di sollecitazione già studiate N, Ty e Mx sulla prima e N +dN, Ty +dTy e Mx + dMx sulla seconda. A questo punto, poiché il concio può essere considerato un corpo esteso nel piano possiamo adoperare le cardinali per studiarne l’equilibrio. Avremo allora:
z
y ds
Mx + + dMx Ty + dTy
Ty
N
Mx
N + dN
q(s) p(s)
m(s)
- N + q(s)ds + N + dN = 0 - Ty + p(s)ds + Ty + dTy = 0
- Mx + m(s)ds – p(s)ds2ds + Mx + dMx – (Ty + dTy)ds = 0
da cui, tenuto conto che i termini “p(s)ds2ds ” e “dTyds” sono infinitesimi di secondo ordine che
possiamo trascurare, si ottiene:
dsdN + q(s) = 0
dsdTy + p(s) = 0
dsdMx + m(s) – Ty = 0
Equazioni indefinite d’equilibrio del concio
Le prime due equazioni ci dicono che (e in che modo) la forza normale e la forza di taglio variano
lungo la trave in presenza di carichi. La terza equazione che possiamo riscrivere nella forma ds
dMx =
Ty (dato che nella pratica m(s) non è quasi mai significativo) è la relazione che sussiste tra le caratteristiche di sollecitazione di momento flettente e taglio ovvero il taglio è il gradiente assiale del momento flettente. Osservazione conclusiva: i diagrammi delle caratteristiche di sollecitazione si potrebbero ricavare con un integrale partendo dalle equazioni indefinite. Questo procedimento è però più un sistema di verifica in quanto è preferibile determinare i diagrammi di sollecitazione in base alla definizione considerando l’equilibrio parziale dei carichi..

Tecnica delle costruzioni meccaniche ????????– Sintesi della lezione del 11/12/2006 (2h)
Nella realtà i corpi non sono infinitamente rigidi; se agiamo su un corpo esteso con forze esterne ne modifichiamo la forma e le proprie caratteristiche geometriche. Introduciamo dunque il concetto di deformabilità, per risolvere problemi iperstatici e per effettuare verifiche di rigidezza. Ad esempio, i 2 alberi di un cambio con rispettive ruote dentate sono progettati per subire piccoli spostamenti sotto-carico, oppure nell’usare un tornio si deformano sia l’oggetto che la punta del tornio stesso, per cui deve esserci una certa rigidezza. Nella nostra analisi i corpi non verranno considerati infinitamente rigidi. Se il corpo raggiunge l’equilibrio, i ragionamenti fatti non perdono di validità, perché all’equilibrio le posizioni relative dei punti non cambiano. Tutti i problemi saranno però del II tipo con le reazioni vincolari sempre definite dalle relazioni cardinali. Esempio:
se il corpo fosse rigido, le reazioni vincolari sarebbero ad ogni istante tali da equilibrare il carico P(t) se è deformabile; bisogna vedere con quale gradualità è imposto il carico, in ogni caso a noi interessa la situazione finale, cioè a corpo deformato e in equilibrio.
L μ
Esempio: mensola incastrata.
P corpo infinitamente rigido di lunghezza L: 0 gradi di libertà Posso tracciare i diagrammi delle caratteristiche di sollecitazione per il taglio (P) e per il momento flettente, il cui valore massimo sarà pari aPL, la forza normale è nulla.
Se considero invece la trave deformabile il suo asse si incurva sotto l’azione del carico, ho una flessione, un taglio e una forza normale, i gradi di libertà sono infiniti e il mio problema diventa del II tipo, non è più di tipo lineare algebrico ma di tipo differenziale non lineare e risolvibile solo con l’utilizzo del calcolatore. Per cui il nostro compito è quello di occuparci di corpi poco deformabili (condizione d’equilibrio molto vicina a quella di partenza) in modo che i risultati che otteniamo siamo molto simili a quelli ottenuti considerando il corpo infinitamente rigido. Esempio: incastro elastico.
P Qui abbiamo una barra infinitamente rigida, incernierata ad un estremo. Vi è attaccata una molla con μ=0.7048 Nm/°, la barra è lunga 1 metro, il carico è pari è di 15 N.
Il momento è proporzionale all’angolo di rotazione α per cui è un problema del II tipo, il carico rimane in posizione verticale anche negli istanti successivi alla sua applicazione, si avrà una situazione di equilibrio per una certa inclinazione dell’asse. Lo schema di corpo libero preliminare è il seguente: 15 μα dalle equazioni cardinali ottengo: α μα-PLcos(απ/180)=0 15 Con l’utilizzo del calcolatore trovo che il valore di α per avere equilibrio è pari a 20°, la struttura risulta quindi particolarmente deformabile (la configurazione di equilibrio è significativamente diversa da quella iniziale). Per risolvere questo tipo di problema posso utilizzare un metodo diverso: un algoritmo iterativo.

i (istante,iterazione) αi bi=Lcos(αi) Mi=Pbi αi+1=Mi/μ 0 0 1000 15000 21.28° 1 21.28° 931.8 13977.3 19.83° 2 19.83° 940.7 14110.5 20.03° 3 20.03° 939.5 14092.7 20.00° Dopo qualche passaggio vediamo come il risultato non cambia e che coincide con quello ottenuto tramite calcolatore. Se prendiamo una molla dieci volte più rigida otteniamo con il metodo iterativo un risultato praticamente identico a quello ottenuto con il calcolatore già al primo passaggio (α=2.128° anziché 2.127°), questo perché se la molla è sufficientemente rigida, si può considerare come configurazione d’equilibrio quella data (di partenza), in quanto la deformazione è poco significativa ai fini del risultato. Quando si accetta questa approssimazione si dice che si usa l’ipotesi di corpi ‘poco deformabili’. Lo stato di tensione (introduzione)
Consideriamo una struttura vincolata per lo meno in modo isostatico, sulla quale è applicato un carico costante qualunque. Se il corpo non è infinitamente rigido, dopo una fase di assestamento e stabilizzazione, avrò deformazione che nel nostro studio sarà piccola tanto da poter confondere A con A* (posizione di un punto qualsiasi del corpo rispettivamente prima e dopo l’applicazione del carico). Vogliamo sapere cosa succede in A quando c’è carico applicato. Introduciamo dunque il concetto di stato di tensione, che ci fornisce il grado di sollecitazione, coazione o cimento per poter determinare quanto il materiale è sollecitato in una certa zona.
Limitiamo la nostra attenzione ai materiali solidi (aggregati cristallini): se la struttura è scarica, c’è una naturale posizione mutua degli atomi nel reticolo; una volta applicato il carico la posizione relativa degli atomi cambia, c’è una distorsione nel cristallo. Nel caso del ferro ad esempio e la geometria del reticolo non è più cubica, ma gli atomi si disporranno a formare un esaedro distorto. Il nostro obiettivo è quantificare l’azione statica che si manifesta nel materiale quando la posizione naturale degli elementi del reticolo è distorta, effettuando una misura quantitativa delle alterazioni delle interazioni elettromagnetiche a corto raggio.

Tecnica delle Costruzioni Meccaniche
Riccardo Bartalucci
Sintesi del 13/12/2006 (2h)
Lo Stato di TensioneLa deformazione dipende dal materiale. Durante il nostro corso, se non diversamente specificato, ipotizzeremo cheesso sia:
• continuo: posso estrarre un cubetto di qualsiasi dimensione (quindi anche infinitesima) che mantenga leproprieta di un corpo (ha un suo volume, posso applicargli una forza, ecc . . . );
• omogeneo: ogni cubetto ha le stesse proprieta, indipendentemente dalla posizione da dove esso e statoestratto;
• isotropo: invarianza di certe proprieta rispetto a diverse direzioni.
Ovviamente tali ipotesi valgono e sono una buona modellizzazione soltanto nel campo macroscopico.La grandezza che definisce lo stato di coazione in un punto e lo stato di tensione. Essa tuttavia non e una grandezzafisica vera e propria in quanto non posso misurarla operativamente, ma soltanto attraverso un passaggio al limite.Per calcolarla, immaginiamo di portarci nel punto A, di scegliere arbitrariamente una superficie passante per quelpunto e di ‘tagliare’ tutti i legami atomici che la attraversano. In questo modo ho perturbato la configurazione diequilibrio degli atomi andando ad eliminare le intensita elettrostatiche di legame a corto raggio. La superficie dopoil taglio si e ‘aperta’ generando una fessura delimitata da due faccie.A questo punto applico ad ogni coppia di atomi allontanati un momento di braccio nullo per ricomporre la configu-razione di equilibrio iniziale. Conoscendo queste forze posso dedurre le interazioni prima del taglio.Introduciamo a questo punto un sistema di riferimento locale di faccia. I suoi assi saranno definiti dai versori n, qe m.Inizialmente prendo in considerazione una faccia soltanto e definisco il versore n come quello uscente dalla superficiee normale ad essa. Gli altri due versori q e m saranno ortogonali tra di loro e appartenenti al piano tangente perl’origine (sempre esistente in quanto la superficie e regolare). Sull’altra faccia prendo i versori (e quindi gli assi)opposto a quelli sulla prima faccia. In questo modo le forze di reazioni sulle due faccie, che sono opposte per ilprincipio di azione-reazione, saranno le stesse nei due sistemi di riferimento. Da notare il fatto che uno dei duesistemi sara destrogiro, mentra l’altro necessariamente levogiro.
Ora posso ridurre il sistema di forze in un sistema equivalente composto da forza e momento risultante applicati nelpunto baricentrale A.
1

Adesso diminuisco sempre di piu la superficie, facendo tendere ∆S → 0, ottenendo infine una superficie piana.Posso cosı introdurre il vettore tensione (traction):
~t = lim∆S→0
∆~F
∆S(1)
A questo punto occorre fare un’ipotesi fondamentale: tale limite esiste ed e finito. Analogamente posso definireanche la seguente grandezza:
~m = lim∆S→0
∆ ~M
∆S(2)
Tuttavia abbiamo:∆ ~M ∝ ∆~F · b ∝ ∆~F ·
√∆S
Sostituendo quindi nella (2), ricordando che ~t e finito,ottengo:
~m = lim∆S→0
∆~F ·√
∆S
∆S= lim
∆S→0~t ·√
∆S = 0
Le nostre ipotesi ci dicono quindi che le interazioni che si scambiano le due superfici infinitesime hanno forza manon momento. Questa teoria e chiamata Meccanica dei solidi semplici.Il vettore tensione quindi varia, in uno stesso punto, a seconda del piano di taglio (e cioe di n). Per questo ~t non eun campo vettoriale. Soltanto conoscendo tutti gli infiniti ~t in un punto, relativi agli infiniti n, posso conoscere lostato di tensione (ricordiamo che esistono ∞2 vettori n).Analizziamo adesso il vettore tensione rispetto al nostro sistema di riferimento:
Definisco la tensione normale (stress), come la componente di ~t su n, cioe:
σ = ~t · n (3)
Se σ > 0 ho una trazione, altrimenti se σ < 0 ho una compressione.Analogamente definisco la tensione tangenziale (shear, tangential stress), come la componente normale di ~t rispetto a n,cioe:
τ =∣~t − σn
∣(4)
Esso e uno scalare sempre positivo, poiche a noi non interessa il verso della tensione tangenziale in quanto siamodavanti a un corpo isotropico. Tuttavia avrei potuto calcolarmi le varie componenti dello shear, utile talvolta quandosiamo di fronte ad un materiale non isotropo:
τq = ~t · q
τm = ~t · m
τ =√
τ2q + τ2
m
Cosı siamo passati dalle tre grandezze scalari di ~t(n) a due (σ(n), τ(n))A questo punto un passo avanti fu fatto da Cauchy che con la sua teoria riuscı a formalizzare meglio il problema.Poniamo l’attenzione su un volumetto infinitesimo dV = dx dy dz e vediamo quali sono le forze agenti su di esso:
• forze di volume: sono forze distribuite, quali la forza peso o la forza d’inerzia, e possono essere scritte nellaforma ~f · (dx dy dz).
• forze di superficie: saranno le tensioni, che per aver definito la distribuzione uniforme, posso scrivere come~t(i) · dy dz.
Tuttavia le forze di volume, essendo infinitesimi di ordine 3, sono trascurabili rispetto alle forze di superficie chesono di ordine 2.Inoltre, poiche ~t(i) ≈ ~t(−i), lo schema di corpo libero dipende in generale soltanto dai tre vettori ~t(i), ~t(j) e ~t(k).
2

Tecnica delle costruzioni meccaniche Simona Muscolino – Sintesi della lezione del 14/12/06 (1h)
Stabilito che l’ equilibrio del cubetto infinitesimo è descrivibile da 3 vettori t1 ,t2 e t3 Cauchy li riportò in una matrice detta appunto MATRICE DI CAUCHY:
Dove: e è la direzione cartesiana m è la faccia del cubo infinitesimo su cui è applicata la tm
ad esempio σ23 è la componente lungo y di t3 che agisce su un piano normale all’ asse z.
RAPPRESENTAZIONE NEL PIANO DELLE TENSIONI POSITIVE AGENTI SUL CUBETTO INFINITESIMO Per adesso abbiamo che la matrice di Cauchy è un insieme di 9 quantità scalari che definiscono in modo inequivocabile lo schema di corpo libero del cubetto infinitesimo. Vogliamo tuttavia ridurre i parametri: la matrice di Cauchy è in realtà una matrice simmetrica per cui non ho piu 9 parametri, ma 6. DIMOSTRAZIONE Prendo un polo A di rotazione appartenente al cubetto infinitesimo come nella figura precedente. So che il cubetto è in equilibrio traslazionale per cui R=0 , ma M=0? Poiché le tensioni normali sono coppie di braccio nullo ho che σ21 dx dz dy- σ12 dx dy dz =0 dove a seconda dei colori sono evidenziati area di una faccia, volume del cubetto e braccio. (σ21 – σ12) dV=0 dV≠0 σ21= σ12 FINE DIMOSTRAZIONE Definisco σ11,σ22 e σ33 tensioni normali e le altre tensioni tangenziali, non ho però ancora tutte le informazioni che mi permettono di conoscere lo stato di tensione per ogni giacitura, ma solo per i, j e k. Per trovarlo uso il metodo del tetraedro di Cauchy che ottengo tagliando il cubo con un piano normale ad una giacitura n:
n= (n1 , n 2, n3 )T
E’ dimostrato che: A1= An1 A2=An2A3=An3Se considero t solo lungo la componente x ottengo: tx A-σ11 A1- σ12 A2 –σ13 A3 =0 tx = σ11 n1 + σ12 n2 + σ13 n3 e generalizzando STATO DI TENSIONE
La matrice di Cauchy S è definita tensore di tensione ed è una matrice simmetrica, che dipende dal sistema di riferimento, è composta da 6 parametri indipendenti e contiene le informazioni necessarie per calcolare lo stato di tensione. Definisco infine: σnm = nT S n tensione normale σqn = qT S n tensione tangenziale

Tecnica delle Costruzioni Meccaniche
Valerio Rossi – Sintesi della lezione del 18/12/2006 (2h)
Abbiamo visto come la matrice di Cauchy S cambi la sua rappresentazione a seconda del sistema di rife-rimento scelto, in particolare si e visto che: S′ = LtSL, dove L e la matrice di rotazione, dove per colonnesono presenti i versori nuovi scritti rispetto al vecchio sistema. Questa legge e la legge di variazione di talematrice, e si puo anche utilizzare per definire cosa sia un tensore. Va notato che tale trasformazione non ecasuale, ma conserva delle proprieta, le quali appunto si chiamano invarianti. Per fare un esempio avevamovisto che il modulo era invariante alle rotazioni, infatti:
v′2 = −→v ′ · −→v ′ =(Lt−→v
)tLt−→v = −→v tLLt−→v = −→v t−→v = −→v · −→v = v2
Possiamo fare una cosa simile anche con S e per fare cio proponiamoci di studiare questo problema.
Esiste, dato uno stato di tensione qualunque, la possibilita di trovare una particolare giacitura n tale per cui ilvettore tensione sia parallelo alla giacitura stessa, o meglio sia ~t(n) ∧ n = 0?
Affinche sia verificata questa condizione deve essere: ~t(n) = σn, dove σ e in realta σnn, ossia la componentelungo n del vettore tensione calcolato per la giacitura normale ad n. Scrivendo l’equazione in termini matricialisi ottiene: Sn = σIn ⇒ (S− σI) n = 0. Questa e un’equazione matriciale parametrica (σ) omogenea, dove lamia incognita e il versore n.A questo punto se si avesse det (S− σI) 6= 0, l’unica soluzione sarebbe quella banale: n = 0, la quale noi sap-piamo pero non avere senso fisico; inoltre, non saremmo nemmeno in grado di rispondere alla domanda che cieravamo proposti. Quindi per ovvi motivi deve essere det (S− σI) = 0. A questo punto abbiamo un’equazionedove l’unica incognita e σ. In definitiva ci siamo ricondotti al trovare gli autovalori e gli autovettori per la matri-ce S. Dall’algebra lineare sappiamo che l’equazione estesa che si ottiene, chiamata equazione caratteristicae, per una matrice 3× 3, di terzo grado, ed ha questa forma:
σ3 − I1σ2 + I2σ − I3 = 0 :
I1 = σ11 + σ22 + σ33
I2 = σ11σ22 + σ22σ33 + σ11σ33 − σ212 − σ2
13 − σ223
I3 = det(S) = σ11σ22σ33 − σ11σ213 − σ33σ
212 + 2σ12σ23σ13
Inoltre gli autovalori sono indipendenti dal sistema di riferimento scelto. Partendo anche da una rappresentazio-ne diversa, quindi, si ottengono le stesse soluzioni dell’equazione caratteristica. Anche I1, I2, I3 sono proprietainvarianti dello stato di tensione.
In definitiva abbiamo scoperto che dei 6 parametri che caratterizzano S solo 3 sono invarianti. Gli autova-lori σ1, σ2, σ3 sono quindi anche chiamati: tensioni principali.
Per risolvere quell’equazione di terzo grado possiamo utilizzare la formula di Cardano cosı scritta:
σk = p + q cos(
φ +23(k − 1)π
): k ∈ N,∈ [1, 3] :
φ =
13
arccos(
2I31 − 9I1I2 + 27I3
2(I21 − 3I2)3/2
)p = I1/3q = (2/3)
√I21 − 3I2
Le soluzioni per questa equazione sono quindi necessariamente tre e reali; possono poi essere tutte distinte, duecoincidenti, oppure tutte e tre coincidenti.
Sviluppiamo adesso separatamente i 3 casi sopra riportati.
• σ1 6= σ2 6= σ3
Sempre dall’algebra sappiamo che se i tre autovalori sono distinti, allora essi sono ortogonali. Vogliamo adessotrovare gli autovettori, quindi per ogni autovalore risolviamo l’equazione: (S− σI) n = 0. La matrice S−σ1I, harango 2, visto che ha determinante nullo ed autovalori distinti, quindi equivale ad un sistema lineare omogeneoin due equazioni e tre incognite, le componenti sul sistema di riferimento noto del versore n(σ1):
(σ11 − σ1)n1 + σ12n2 + σ13n3 = 0σ21n1 + (σ22 − σ1) + σ23n3 = 0
Questo per quanto riguarda il primo autovalore σ1. Lo stesso poi va fatto per gli altri autovalori. A questosistema che ha∞1 soluzioni va aggiunta la condizione di modulo unitario; in questo modo ottengo come soluzione
1

solo n. Dopo aver proceduto anche con gli altri autovalori ho determinato tre direzioni tra loro ortogonali, le qualimi rappresentano una base di versori, o meglio un sistema di riferimento tramite il quale posso rappresentarela matrice S sotto forma di matrice diagonale:
Sp =
σ1 0 00 σ2 00 0 σ3
Questa matrice prende quindi il nome di matrice principale, in virtu del fatto che ha come diagonale gliautovalori principali e rappresenta lo stato di tensione attraverso un sistema di assi principali, gli autovettoriprima trovati. Per la isotropia del materiale, pero risulta molto piu importante il valore delle tensioni principali,piuttosto che le direzioni principali, in quanto si puo scrivere lo stesso stato di tensione in ∞2 modi diversi, purrimanendo invariate le tensioni principali. Per i nostri fini, quindi sara molto importante conoscere tali tensioni.Esistono poi delle linee che inviluppano le direzioni principali, chiamate isostatiche, per ogni punto del corpoconsiderato, e sono 3 famiglie di curve mutuamente ortogonali in ogni punto. Queste linee danno un’idea delflusso delle tensioni nel corpo.
• σ1 = σ2 6= σ3
Per σ3 posso procedere esattamente come prima, trovando subito n(σ3). Quando invece mi occupo degli altridue autovettori, devo osservare che adesso il rango della matrice S − σ1I e 1; posso quindi utilizzare una solaequazione, dato che le altre sono linearmente dipendenti:
(σ11 − σ1)n1 + σ12n2 + σ13n3 = 0 ⇒ n1 = f(α, β)
Quindi, ricordando anche di imporre che il modulo deve essere unitario, si hanno adesso davvero ∞1 soluzioni,cio significa che sono terne principali tutte quella aventi un asse parallelo a n(σ3) e gli altri giacenti sul pianoortogonale ad esso e di direzione qualsiasi.
• σ1 = σ2 = σ3 = σ0
In questo caso per tutti e tre gli autovalori la matrice ha rango nullo, ciio implica automaticamente che qualsiasidirezione e principale. Abbiamo cosı ∞3 possibili terne principali per ogni punto. Questo particolare statodi tensione fu gia scoperto da Pascal per quanto riguarda i fluidi, chiamato appunto idrostatico ed e di essicaratteristico. Si ha quindi:
Sp ≡ S =
σ0 0 00 σ0 00 0 σ0
Ricapitolando, dunque, posso dire che qualunque sia lo stato di tensione e qualunque sia il sistema di partenza,posso sempre trovare delle direzioni principali; sono sempre in grado, quindi, di diagonalizzare la matrice diCauchy.
Classifichiamo adesso lo stato di tensione a seconda delle tensioni principali:
• σ1 6= σ2 6= σ3 6= 0 → Stato di tensione triassiale
• σ1 = 0 , σ2 , σ3 6= 0 → Stato di tensione biassiale
σ1 = 0 , σ2 = σ3 → Equibiassialeσ1 = 0 , σ2 = −σ3 → Taglio puro
• σ1 = σ2 = 0 , σ3 6= 0 → Stato di tensione monoassiale.
2

Tecnica delle costruzioni meccaniche Basilio Lenzo – Sintesi della lezione del 20/12/2006 (2h)
Nelle precedenti lezioni si era arrivati a definire la matrice di Cauchy S, che in un determinato sistema di riferimento rappresenta lo stato di tensione, e se n’era vista la legge di variazione per rotazione. S è una quantità tensoriale (tensore di Cauchy – stress tensor) ed è una rappresentazione cartesiana che permette di determinare univocamente lo stato di tensione per ogni giacitura. Si supponga di avere uno stato di tensione monoassiale, ad esempio
y
z
x
40
40
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
0000000040
e di voler capire cosa sentono le facce inclinate di un generico angolo α
A B
40 40 y
x
z Presa la nota legge di trasformazione S’ = LTSL, si trova facilmente L
L ottenendo quindi S’ ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=
1000 cossin 0sin - cos
αααα
2
2
cos sin cos 0sin cos sin 0 40
0 0
α α αα α α
⎛ ⎞−⎜ ⎟
1= − ⋅⎜ ⎟⎜ ⎟⎝ ⎠
Si avranno in generale anche tensioni tangenziali: è dunque scorretto affermare che in caso di stato di tensione monoassiale non vi sono tensioni tangenziali. Come si vedrà meglio in seguito, possono aversi solo tensioni normali nel solo caso di stato di tensione idrostatico. Si introduce ora un particolare strumento operativo, il piano di Mohr: in esso sono riportate in ascissa le tensioni normali σ e in ordinata le tensioni tangenziali τ. Ogni punto del piano rappresenta lo stato di tensione su una faccia. Il modulo del vettore tensione è dato dalla congiungente del punto considerato con l’origine. L’origine rappresenta la condizione di una faccia scarica. In generale, sulla faccia A agiranno tensioni del tipo σ12, analogamente sulla faccia B agiranno delle σ21. Moltiplicando vettorialmente i versori corrispondenti agli indici si ottiene i ^ j = k per la faccia A (detta perciò antioraria), e j ^ i = ‐k per la faccia B (oraria): si utilizzerà la convenzione di rappresentare le τ col proprio segno in caso di faccia antioraria, e col segno cambiato per la faccia oraria.
B’(σx’x’,-σy’x’)
A’ (σy’y’,σx’y’)
BA 0 σ20 40
τ
Tornando all’esempio appena visto, sfruttando semplici relazioni trigonometriche, per una generica rotazione α si avrà: σx’x’ = 20 (1+cos2α) σy’y’ = 20 (1‐cos2α) σx’y’ = ‐20 (sen2α)
Riportando per ogni α un punto sul piano di Mohr, si ottiene una circonferenza. Tale circonferenza rappresenta tutti e soli i punti (combinazioni σ τ) che si ottengono ruotando intorno all’asse z di un generico α, basta spostarsi di 2α sulla circonferenza. Si esamina ora un caso biassiale:
τ Le facce A e B si trovano a 180° sul piano di Mohr, dunque in realtà a 90°: infatti si vede facilmente che, ruotando di 90°, esse si “scambiano”. Si noti che un caso particolare dello stato biassiale è quello monoassiale, in cui la circonferenza passa per l’origine.
AB y
20
20 z x
60 A B
20 40 σ
60
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
00002000060
60
Infine, per generalizzare, si studia un caso triassiale:
60
10
20 z
x
y
Per motivi grafici si riportano le tensioni solo su metà cubetto.
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−100002000060
Guardando dall’asse z, ci si ritrova a trattare proprio lo stesso caso di prima. Si può ragionare in maniera analoga guardando dall’asse x e poi dall’asse y, trovando in totale tre circonferenze, che si riportano sul piano di Mohr.

τ Ci si rende tuttavia conto di come quanto finora esposto sia limitato, in quanto si sono considerate solo sezioni realizzate con piani paralleli ad una delle direzioni principali. Volendo prendere una sezione generica, tenuto conto del fatto che non si possono definire facce orarie e antiorarie e che si considererà solo il modulo di τ, si dimostra che il punto caratteristico si trova sempre all’interno della cosiddetta “lunula di Mohr”, la parte tratteggiata in figura. Si dimostra anche che per ogni punto nella lunula esiste almeno un piano e viceversa.
σ60 -10 0 20 40
Ad esempio, sia dato uno stato di tensione e sia richiesto di determinare se esiste o meno un piano con un certo valore di τ: si diagonalizza il tensore di Cauchy trovandone gli autovalori, si disegnano i cerchi di Mohr; considerando la lunula di Mohr, il piano richiesto esiste solo se ad esso corrisponde un punto della lunula. La tensione estrema è la massima tensione normale esistente ed è anche il massimo valore del modulo del vettore tensione. Si esaminano ora alcuni casi particolari. 1. Si supponga di avere τ
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−
0000101001050
In questo caso la terza tensione principale è nulla, e lo stato di tensione è al massimo biassiale, dunque è sufficiente trovare gli autovalori di una matrice 2x2. In alternativa si possono riportare sul piano di Mohr i due punti noti (50,‐10) e (‐10,10)
corrispondenti a due facce poste a 90°, cioè diametralmente opposte sul piano di Mohr: si disegna immediatamente la circonferenza trovando gli autovalori grafica‐mente e potendo così ricavare subito la lunula. Volendo trovare gli autovettori, basta considerare l’angolo γ in figura, e ruotare di γ/2 in senso antiorario.
σ 0 20 40
2. Caso di taglio puro: la lunula è simmetrica rispetto all’asse delle τ. 3. Caso di stato di tensione idrostatico: si ha un solo punto, dunque una lunula degenere; tutte le orientazioni sono indifferenti, si avrà in ogni caso solo σ. τ4. Caso di stato di tensione equibiassiale: per meglio comprendere cosa accade risulta utile esaminare uno stato di tensione quasi equibiassiale. Come si vede dall’esempio in figura, tendendo ad uno stato di tensione equibiassiale, la lunula degenera nella semicirconferenza superiore.
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
00004900050
σ
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
0000100050
τ5. Caso di stato di tensione monoassiale: si ragiona analogamente al caso
precedente, andando a vedere cosa accade in uno stato di tensione quasi monoassiale. Anche qui, tendendo ad uno stato di tensione monoassiale, la lunula degenera nella semicirconferenza superiore.
σ
Come si era visto per i conci di trave, è possibile ricavare le Equazioni d’equilibrio indefinite del cubo:
xyxy dy
yσ
σ∂
+∂
Nella figura si sono omesse, per semplicità di
rappresentazione, le tensioni xzσ e xzxz dz
zσσ ∂
+∂
.
Tenendo conto delle forze di volume fx (che tuttavia spesso sono trascurabili), si può scrivere l’equazione di equilibrio alla traslazione lungo x
y xx
xx dxxσσ ∂
+∂
xf xxσ
xyσ
x
0xyxx xzxx xx xy xy xz xz xdydz dx dydz dxdz dy dxdz dxdy dz dxdy f dxdydz
x y zσσ σσ σ σ σ σ σ∂⎛ ⎞∂ ∂⎛ ⎞ ⎛ ⎞− + + − + + − + + +⎜ ⎟⎜ ⎟ ⎜ ⎟∂ ∂ ∂⎝ ⎠ ⎝ ⎠⎝ ⎠
=
Semplificando si ottiene
0xyxx xzxf
x y zσσ σ∂∂ ∂
+ + + =∂ ∂ ∂
Con considerazioni analoghe (equilibrio alla traslazione lungo y e poi lungo z) si ricavano le altre due equazioni.