Ernest Cachia University of Malta “Real-Time System Development” Slide No. 1 of part 2 Schematic...
15
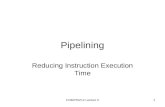
Schematic Task Execution Example time E A BC D F (Deadline) Executio n i Execution i+1 Key AD: Task execution time AF: Task period AE: Jitter BC: Transport lag
-
Upload
doris-griffin -
Category
Documents
-
view
214 -
download
0
Transcript of Ernest Cachia University of Malta “Real-Time System Development” Slide No. 1 of part 2 Schematic...

Ernest CachiaUniversity of Malta“Real-Time System Development”Slide No. 1 of part 2
Schematic Task Execution Example
time
EA B C D F (Deadline)
Execution i Execution i+1
KeyAD: Task execution timeAF: Task periodAE: JitterBC: Transport lag

Ernest CachiaUniversity of Malta“Real-Time System Development”Slide No. 2 of part 2
More About Deadlines
Usually defined as: Hard
If missed, usually result in some sort of system catastrophic failure
FirmIf missed, usually cause the system to produce useless (or senseless) results
SoftIf missed, usually deter from the usefulness of the results in direct proportion to the extent by which the soft deadline is missed

Ernest CachiaUniversity of Malta“Real-Time System Development”Slide No. 3 of part 2
Performance of R-T SystemsMain players are: Response time
Context switching Interrupt latency Computation speed Data storage access speed
Data transfer rate Loads of hardware stats (I/O
throughput, bus inertia, disk performance, memory/buffer size, controller performance, etc.)

Ernest CachiaUniversity of Malta“Real-Time System Development”Slide No. 4 of part 2
Interrupt Handling
In non-R-T systems interrupts may be handled whenever deemed appropriate by the system
In R-T systems it’s the external world which dictates when the system is to respond.
Interrupts need not be sequential - meaning the allocation of priorities to different interrupts

Ernest CachiaUniversity of Malta“Real-Time System Development”Slide No. 5 of part 2
Multi-priority Interrupts
time
Inte
rru
pt p
riori
ty le
vel
3
2
1
0
Key Level 3 interrupt execution Level 2 “ “ Level 1 “ “ Normal computation priority

Ernest CachiaUniversity of Malta“Real-Time System Development”Slide No. 6 of part 2
Important Interrupt Modelling Facts More than one real-world interrupt
can arrive at any time Interrupts can be interrupted by
others with a higher priority Too many interrupts can hinder
overall R-T system performance Devise ways by which to minimise
the impact of multiple interrupts on the system

Ernest CachiaUniversity of Malta“Real-Time System Development”Slide No. 7 of part 2
Dynamic performance calculationTake into account: Average interrupt frequency Average time required to service a
serviceable interrupt Other parts of the software that
can interrupt their servicing
It is of system-vital importance that thesystem remains capable of meeting all itstime constraints even in the face of“interrupt onslaught”. Failure to do so willresult in system collapse.

Ernest CachiaUniversity of Malta“Real-Time System Development”Slide No. 8 of part 2
Part 1 of your assignment
PLEASE SEE SEPARATE DOCUMENT, THE
NAME OF WHICH WILL BE ANNOUNCED IN
DUE COURSE, FROM WEBSITE
DOWNLOAD OR ANNOUNCMENTS AREAS

Ernest CachiaUniversity of Malta“Real-Time System Development”Slide No. 9 of part 2
R-T Task Classification
PeriodicExecution starts at pre-defined intervals
AperiodicRandom execution start times
ServerResource sharing and synchronisation

Ernest CachiaUniversity of Malta“Real-Time System Development”Slide No. 10 of part 2
Task Class Properties
Rate
Jitter Deadline
Executiontime
PERIODIC
Exceptions
Priority
Executiontime
Deadline
Activation &executionconditions
Priority APERIODIC
Timingconstraints
Activation &executionconditions
Usageconstraints
SERVER

Ernest CachiaUniversity of Malta“Real-Time System Development”Slide No. 11 of part 2
Example of R-T System Requirements(Based on example in “Software Engineering Fundamentals” by A. Behforooz et al.)
Execution time = 20 msPeriod = 100 ms
Execution time = 40 msPeriod = 150 msDeadline = 130 ms
Execution time = 100 msPeriod = 350 ms
Periodic Task 1
Periodic Task 2
Periodic Task 3
Usage:1(2 ms), 2(20 ms)
Usage:1(10 ms), 3(10 ms)
Server Task 1
Server Task 2
Mean arrival time = 50 msExecution time = 3 msDeadline = 5 ms
Aperiodic Task 1
Mean arrival time = 40 msExecution time = 2 msDeadline = 4 ms
Aperiodic Task 2

Ernest CachiaUniversity of Malta“Real-Time System Development”Slide No. 12 of part 2
Execution Time Estimation
Values required for calculation are:
Average instruction execution time Interrupt latency Very detailed description of task I/O instruction execution time
Interrupt latency is analysed in the following slide ...

Ernest CachiaUniversity of Malta“Real-Time System Development”Slide No. 13 of part 2
Interrupt Latency Composition
Interrupt latency
Interrupt occurs
Save state of current task
Decode interrupt
Start and complete interrupt actions
Save state of interrupt
Restore state of interrupted task
Continue execution of interrupted task
1
2
3
4
5
6
7

Ernest CachiaUniversity of Malta“Real-Time System Development”Slide No. 14 of part 2
Execution Time Estimation Example (1)
Known quantities are:
Task rate (30 s-1) period of 33.33 ms
Longest exec. path (2900 sloc) HLL-to-assembly expansion (6:1) Interrupt latency (0.1 ms) Av. int. trans. delay (0.85 ms) Av. instruction exec. time (300 ns) Assume a “cushioning” of 20%

Ernest CachiaUniversity of Malta“Real-Time System Development”Slide No. 15 of part 2
Max task execution time:2900 sloc x 6 = 17,400 tloc
1 tloc execution time: 0.0003 ms
Total tloc execution time:17,400 tloc x 0.0003 ms = 5.22 ms
Total execution time for 1 task:(total tloc exe. + int. trans. delay + int. latency)5.22 ms + 0.85 ms + 0.1 ms = 6.17 ms
Total periodic execution time:6.17 ms x 30 tasks/s = 185.1 ms
Include cushioning (20%):185.1 ms + 10.8 ms = 196 ms
Execution Time Estimation Example (2)