Enhancement of Field Balancing Methods in Rotating Machines
240
Enhancement of Field Balancing Methods in Rotating Machines A thesis submitted to The University of Manchester for the degree of Doctor of Philosophy (PhD) In the Faculty of Science and Engineering 2017 Sami Meshal F Ibn Shamsah School of Mechanical, Aerospace and Civil Engineering
Transcript of Enhancement of Field Balancing Methods in Rotating Machines

Enhancement of Field Balancing Methods in
Rotating Machines
A thesis submitted to The University of Manchester for the degree of
Doctor of Philosophy (PhD)
In the Faculty of Science and Engineering
2017
Sami Meshal F Ibn Shamsah
School of Mechanical, Aerospace and Civil Engineering

2
(This page is intentionally left blank)

3
Table of Contents
LIST OF TABLES ............................................................................................................ 7
LIST OF FIGURES .......................................................................................................... 8
LIST OF NOMENCLATURES ...................................................................................... 13
LIST OF ABBREVIATIONS ......................................................................................... 14
LIST OF PUBLICATIONS ............................................................................................ 15
ABSTRACT .................................................................................................................... 16
DECLARATION ............................................................................................................ 17
COPYRIGHT STATEMENT ......................................................................................... 18
ACKNOWLEDGMENTS .............................................................................................. 19
DEDICATION ................................................................................................................ 20
INTRODUCTION ................................................................................. 21 CHAPTER 1
General introduction ......................................................................................... 22 1.1
Motivations ....................................................................................................... 25 1.2
Aims and objectives ......................................................................................... 26 1.3
Research contributions ..................................................................................... 27 1.4
Layout of thesis ................................................................................................ 28 1.5
LITERATURE REVIEW ...................................................................... 31 CHAPTER 2
Introduction ...................................................................................................... 32 2.1
Modal balancing approach ............................................................................... 32 2.2
Influence coefficient balancing method ........................................................... 34 2.3
Unified balancing approach .............................................................................. 41 2.4
Mathematical model-based rotor balancing technique ..................................... 42 2.5
2.5.1 Model-based rotor balancing using full mathematical model ............... 43
2.5.2 Model-based rotor balancing using reduced mathematical model ........ 44
Summary and conclusion ................................................................................. 51 2.6
EXPERIMENTAL SETUP AND INSTRUMENTATION .................. 52 CHAPTER 3
Introduction ...................................................................................................... 53 3.1
Experimental rig ............................................................................................... 53 3.2
3.2.1 Main elements of the experimental rig .................................................. 55
Data acquisition system .................................................................................... 65 3.3
3.3.1 Sensors ................................................................................................... 65

4
3.3.2 Signal conditioner .................................................................................. 67
3.3.3 DAQ device ........................................................................................... 67
3.3.4 DAQ software ........................................................................................ 68
Modal tests ....................................................................................................... 69 3.4
3.4.1 Modal test of assembled rig ................................................................... 69
3.4.2 Modal testing of free-free shaft ............................................................. 76
3.4.3 Discussion on the influence of supporting structure ............................. 79
Summary .......................................................................................................... 80 3.5
MATHEMATICAL MODELLING AND SIGNAL PROCESSING ... 81 CHAPTER 4
Introduction ...................................................................................................... 82 4.1
Mathematical modelling of a simple rotating machine using the FE method .. 82 4.2
4.2.1 Shaft element ......................................................................................... 83
4.2.2 Disc element .......................................................................................... 90
4.2.3 Foundation model .................................................................................. 91
4.2.4 Influence of damping on the rotor dynamic model ............................... 92
4.2.5 Modelling of the system ........................................................................ 95
Signal processing .............................................................................................. 98 4.3
4.3.1 3D waterfall plot .................................................................................... 98
4.3.2 Order tracking ........................................................................................ 99
4.3.3 Bode plot ............................................................................................. 100
Summary ........................................................................................................ 102 4.4
SENSITIVITY ANALYSIS OF IN-SITU ROTOR BALANCING ... 103 CHAPTER 5
Introduction .................................................................................................... 105 5.1
Experimental rig ............................................................................................. 106 5.2
Experiments .................................................................................................... 106 5.3
Unbalance estimation ..................................................................................... 109 5.4
Results and observations ................................................................................ 110 5.5
Conclusion ...................................................................................................... 115 5.6
MULTI-PLANES ROTOR UNBALANCE ESTIMATION USING CHAPTER 6
INFLUENCE COEFFICIENT METHOD .................................................................... 116
Introduction .................................................................................................... 118 6.1
Experimental rig ............................................................................................. 119 6.2
Machine runs and data acquisition ................................................................. 120 6.3
Application of IC method ............................................................................... 123 6.4

5
Unbalance estimation and discussion ............................................................. 124 6.5
Concluding remarks ....................................................................................... 128 6.6
SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT CHAPTER 7
BALANCING METHOD FOR MULTIPLE PLANES ROTOR BALANCING WITH
REDUCED NUMBER OF SENSORS ......................................................................... 129
Introduction .................................................................................................... 131 7.1
Theory of IC balancing method ...................................................................... 133 7.2
Example-1: rig with one balancing plane ....................................................... 136 7.3
7.3.1 Experimental setup .............................................................................. 136
7.3.2 Instrumentation .................................................................................... 137
7.3.3 Modal tests .......................................................................................... 138
7.3.4 Experiments carried out ....................................................................... 140
Sensitivity analysis of unbalance estimation .................................................. 141 7.4
7.4.1 Using single speed ............................................................................... 141
7.4.2 Using speed range ............................................................................... 144
Example-2: rig with two balancing planes ..................................................... 147 7.5
7.5.1 Experiments carried out ....................................................................... 149
Sensitivity analysis of unbalance estimation .................................................. 152 7.6
7.6.1 Using vertical and horizontal responses .............................................. 152
7.6.2 Using radial responses only ................................................................. 161
Comparison of results ..................................................................................... 171 7.7
Overall observations ....................................................................................... 172 7.8
Concluding remarks ....................................................................................... 173 7.9
MATHEMATICAL MODEL-BASED ROTOR UNBALANCE CHAPTER 8
ESTIMATION USING A SINGLE MACHINE RUNDOWN WITH REDUCED
NUMBER OF SENSORS ............................................................................................. 175
Introduction .................................................................................................... 176 8.1
Earlier method ................................................................................................ 177 8.2
Proposed method ............................................................................................ 179 8.3
8.3.1 Theory ................................................................................................. 180
8.3.2 Parameter estimation ........................................................................... 182
Simulated example ......................................................................................... 185 8.4
Results and discussion .................................................................................... 185 8.5
8.5.1 Vertical response only ......................................................................... 186
8.5.2 Horizontal response only ..................................................................... 187

6
8.5.3 Radial responses only .......................................................................... 188
Conclusion ...................................................................................................... 191 8.6
MULTI-PLANES ROTOR UNBALANCE IDENTIFICATION USING CHAPTER 9
DATA FROM A SINGLE MACHINE RUN-UP WITH REDUCED NUMBER OF
SENSORS ............................................................................................................. 193
Introduction .................................................................................................... 195 9.1
Earlier method ................................................................................................ 196 9.2
Proposed method ............................................................................................ 204 9.3
Experimental rig with one balancing plane .................................................... 205 9.4
Modal tests ..................................................................................................... 206 9.5
Experiments conducted .................................................................................. 209 9.6
Unbalance estimation ..................................................................................... 211 9.7
9.7.1 Part 1: application of the earlier method ............................................. 211
9.7.2 Part 2: application of the proposed method ......................................... 212
9.7.3 Comparison between the earlier and proposed methods ..................... 213
Modified test rig with two balancing planes .................................................. 214 9.8
9.8.1 Experiments and unbalance estimation ............................................... 218
Concluding remarks ....................................................................................... 221 9.9
CONCLUSIONS AND FUTURE WORK ...................................... 223 CHAPTER 10
Summary of research context ..................................................................... 224 10.1
Main achievements ..................................................................................... 225 10.2
Overall conclusion ...................................................................................... 227 10.3
Future work ................................................................................................. 227 10.4
REFERENCES .............................................................................................................. 228
APPENDICES .............................................................................................................. 239
Word Count: 43,197

LIST OF TABLES
7
LIST OF TABLES
Table 3.1 Natural frequencies of the test rig ................................................................... 74
Table 5.1 Unbalance and phase of 8 runs ..................................................................... 108
Table 5.2 Sensitivity using different runs ..................................................................... 110
Table 6.1 Mass unbalances and phase angles of 6 machine runs.................................. 122
Table 7.1 List of 6 machine runs with different added unbalances (mass and phase
angles) ........................................................................................................................... 141
Table 7.2 Different scenarios used for the estimation of the added unbalance ............. 141
Table 7.3 List of 13 machine run-ups with different added unbalances (mass and phase
angles) ........................................................................................................................... 150
Table 7.4 Different scenarios used for the added unbalance estimation ....................... 151
Table 7.5 List of 10 scenarios used for the added unbalance estimation ...................... 162
Table 8.1 The unbalance and foundation stiffness configurations for the simulated
examples ........................................................................................................................ 186
Table 8.2 The estimated unbalance for the simulated examples using vertical and
horizontal directions separately..................................................................................... 188
Table 8.3 The estimated unbalance for the simulated examples using 𝑟𝑘1 and 𝑟𝑘2 directions separately ...................................................................................................... 189
Table 9.1 Experimentally identified natural frequencies of test rig with one balancing
disc at zero RPM ........................................................................................................... 207
Table 9.2 List of 7 machine runs with different added unbalances (mass and phase
angles) ........................................................................................................................... 210
Table 9.3 Different scenarios used for the added unbalance estimation ....................... 212
Table 9.4 Estimated unbalance for the different scenarios using pair of orthogonal
sensors (at vertical and horizontal directions) at a bearing pedestal ............................. 212
Table 9.5 Estimated unbalance using only one sensor at a bearing pedestal (at radial
direction) ....................................................................................................................... 213
Table 9.6 Experimentally identified natural frequencies of test rig with two balancing
discs at zero RPM ......................................................................................................... 215
Table 9.7 List of 8 machine runs with different added unbalances (mass and phase
angles) ........................................................................................................................... 219
Table 9.8 Different scenarios used for the added unbalance estimation ....................... 219
Table 9.9 Estimated unbalance for the different scenarios using 1 sensor (at radial
direction) per bearing pedestal ...................................................................................... 220

LIST OF FIGURES
8
LIST OF FIGURES
Figure 1.1 (a) Photograph of a 9HA gas turbine rotor on the half shell casing [2], (b)
block diagram of the turbine in part a ............................................................................. 22
Figure 1.2 Graphical abstract of the thesis layout ........................................................... 30
Figure 3.1 3D drawings of the experimental rig, (a) first configuration, (b) second
configuration ................................................................................................................... 54
Figure 3.2 Presentation of the different elements of the assembled test rig (first
configuration) .................................................................................................................. 55
Figure 3.3 Steps of constructing the experimental rig (first configuration) .................... 56
Figure 3.4 Layout of the (a) first and (b) second configurations of the experimental
rig .................................................................................................................................... 57
Figure 3.5 (a) Photograph and (b) dimensions of typical balancing disc........................ 58
Figure 3.6 (a) Photograph of typical ball bearing (model: SY20TF) and (b) its
dimensions in mm ........................................................................................................... 59
Figure 3.7 Steps of attaching the double-sided adhesive tape and shim to the horizontal
beam ................................................................................................................................ 60
Figure 3.8 Photographs of the electrical motor used in the experiments ........................ 60
Figure 3.9 Delta USB-RS485 converter.......................................................................... 61
Figure 3.10 Flexible coupling (a) before and (b) after assembling ................................. 62
Figure 3.11 Steps of constructing the foundation ........................................................... 63
Figure 3.12 Photograph of the foundation ...................................................................... 63
Figure 3.13 Machine guard (a) close position, (b) open position ................................... 64
Figure 3.14 Hinge operated safety switch ....................................................................... 64
Figure 3.15 Functional diagram of typical DAQ system ................................................ 65
Figure 3.16 Schematic cross-sectional view of compression mode ICP acceleration
sensor .............................................................................................................................. 66
Figure 3.17 (a) Front and (b) back sides of the signal conditioner used in the modal
test ................................................................................................................................... 67
Figure 3.18 16-bit 16-channel DAQ hardware ............................................................... 68
Figure 3.19 DAQ driver software ................................................................................... 69

LIST OF FIGURES
9
Figure 3.20 Setup of the modal test of the (a) first and (b) second test rig
configurations .................................................................................................................. 70
Figure 3.21 Schematic of the setup and instrumentations used for the modal test (first
configuration) .................................................................................................................. 71
Figure 3.22 Typical FRF plots in (a) vertical and (b) horizontal directions at location 4
(first configuration) ......................................................................................................... 73
Figure 3.23 Mode shapes of the (a)1st, (b) 2
nd, (c) 3
rd and (d) 4
th modes of the system (1
st
configuration) .................................................................................................................. 74
Figure 3.24 Typical FRF plots in (a) vertical and (b) horizontal directions at location 4
(second configuration) .................................................................................................... 75
Figure 3.25 Mode shapes of the (a)1st, (b) 2
nd, (c) 3
rd and (d) 4
th modes of the system
(2nd
configuration) ........................................................................................................... 76
Figure 3.26 Shaft dimensions .......................................................................................... 76
Figure 3.27 Setup of the modal test of a free-free steel shaft ......................................... 78
Figure 3.28 Typical FRF plot of free-free shaft obtained during modal testing ............. 79
Figure 4.1 The local coordinates of a beam element ...................................................... 83
Figure 4.2 Condition of Euler-Bernoulli beam theory .................................................... 84
Figure 4.3 A rotor element with degrees of freedom (a) horizontal plane, (b) vertical
plane, (c) combination of horizontal and vertical ........................................................... 89
Figure 4.4 FRF plot indicating the natural frequency and half-power amplitudes (1st rig
configuration) .................................................................................................................. 94
Figure 4.5 FRF plot marking the natural frequency and half-power amplitudes (2nd
rig
configuration) .................................................................................................................. 95
Figure 4.6 A simple schematic representation of the rotor system used to demonstrate
the matrix assembly......................................................................................................... 98
Figure 4.7 Typical 3D waterfall plot ............................................................................... 99
Figure 4.8 (a) Time waveform, (b) vibration spectrum of the time waveform ............. 100
Figure 4.9 Typical Bode plot of the 1× shaft displacement for machine coast-up ....... 101
Figure 4.10 Typical Bode plot of the 2× shaft displacement for machine coast-up ..... 101
Figure 5.1 Photographic representation of the experimental rig ................................... 107
Figure 5.2 Demonstration of the added unbalance (mass and phase angle) ................. 108

LIST OF FIGURES
10
Figure 5.3 Typical measured 1× displacement responses in vertical direction for the
experimental runs 1, 4 and 6 at (a) B1 and (b) B2 ........................................................ 108
Figure 5.4 The actual and estimated unbalances and phase angles for (a) case I, (b) case
II, (c) case III, (d) case IV, (e) case V and (f) case VI .................................................. 113
Figure 5.5 A typical comparison between the actual and estimated rotor unbalance at
different single speeds for Case II ................................................................................. 114
Figure 6.1 Mechanical layout of the test rig ................................................................. 120
Figure 6.2 Typical measured 1× displacement responses in horizontal direction for the
experimental runs 3 and 5 at bearings (a) B1 and (b) B2.............................................. 121
Figure 6.3 Actual and estimated unbalances (amplitude and phase) of (𝑟𝑢𝑛3 − 𝑟𝑢𝑛0) at
(a) disc d1 and (b) disc d2; * : estimated unbalance, : actual added unbalance .... 125
Figure 6.4 Actual and estimated unbalances (amplitude and phase) of (𝑟𝑢𝑛4 − 𝑟𝑢𝑛0) at
(a) disc d1 and (b) disc d2; * : estimated unbalance, : actual added unbalance .... 126
Figure 6.5 Actual and estimated unbalances (amplitude and phase) of (𝑟𝑢𝑛5 − 𝑟𝑢𝑛0) at
(a) disc d1 and (b) disc d2; * : estimated unbalance, : actual added unbalance .... 127
Figure 7.1 Photographs of the rig (a) assembled rig, (b) balancing disc, (c) flexible
coupling ......................................................................................................................... 137
Figure 7.2 Laser tachometer .......................................................................................... 138
Figure 7.3 Typical measured FRF plots of the rotor at distance of 75cm from bearing
B1, (a) vertical direction, (b) horizontal direction ........................................................ 139
Figure 7.4 Typical arrangement of accelerometers on bearing pedestal ....................... 140
Figure 7.5 Comparison between the actual and estimated rotor unbalance for (a,b) case
III, (c,d) case IV; ○: estimated unbalance using different single speeds, ☆: error, :
actual added unbalance ................................................................................................. 143
Figure 7.6 Comparison between the actual and estimated rotor unbalance for (a,b) case
III, (c,d) case IV; ○: estimated unbalance using speed range, ☆: error, : actual added
unbalance....................................................................................................................... 146
Figure 7.7 Photograph of the test rig with two balancing discs .................................... 147
Figure 7.8 Typical measured FRF plots of the rotor at distance of 75cm from bearing B1
in (a) vertical and (b) horizontal directions ................................................................... 148
Figure 7.9 A typical accelerometer installation at a bearing in 3 directions ................. 149
Figure 7.10 Case I (a) disc D1 (𝑒1,3), (b) error of unbalance in disc D1, (c) disc
D2(𝑒2,3), (d) error of unbalance in disc D2; ○: estimated unbalance, ☆: error, :
actual added unbalance ................................................................................................. 154

LIST OF FIGURES
11
Figure 7.11 Case II (a) disc D1 (𝑒1,4), (b) error of unbalance in disc D1, (c) disc
D2(𝑒2,4), (d) error of unbalance in disc D2; ○: estimated unbalance, ☆: error, :
actual added unbalance ................................................................................................. 156
Figure 7.12 Case IV (a) disc D1 (𝑒1,6), (b) error of unbalance in disc D1, (c) disc
D2(𝑒2,6), (d) error of unbalance in disc D2; ○: estimated unbalance, ☆: error, :
actual added unbalance ................................................................................................. 158
Figure 7.13 Case IX (a) disc D1 (𝑒1,11), (b) error of unbalance in disc D1, (c) disc
D2(𝑒2,11), (d) error of unbalance in disc D2; ○: estimated unbalance, ☆: error, :
actual added unbalance ................................................................................................. 160
Figure 7.14 Case I (a) disc D1 (𝑒1,3), (b) error of unbalance in disc D1, (c) disc
D2(𝑒2,3), (d) error of unbalance in disc D2; ○: estimated unbalance, ☆: error, :
actual added unbalance ................................................................................................. 164
Figure 7.15 Case II (a) disc D1 (𝑒1,4), (b) error of unbalance in disc D1, (c) disc D2
(𝑒2,4), (d) error of unbalance in disc D2; ○: estimated unbalance, ☆: error, : actual
added unbalance ............................................................................................................ 166
Figure 7.16 Case IV (a) disc D1 (𝑒1,6), (b) error of unbalance in disc D1, (c) disc D2
(𝑒2,6), (d) error of unbalance in disc D2; ○: estimated unbalance, ☆: error, : actual
added unbalance ............................................................................................................ 168
Figure 7.17 Case IX (a) disc D1 (𝑒1,11), (b) error of unbalance in disc D1, (c) disc D2
(𝑒2,11), (d) error of unbalance in disc D2; ○: estimated unbalance, ☆: error, : actual
added unbalance ............................................................................................................ 170
Figure 7.18 Grouped bar chart of the comparison between actual and estimated
unbalances for (a) disc D1, and (b) disc D2 .................................................................. 172
Figure 8.1 (a) Schematic representation of the rig, (b) measurements are taken in the
radial direction .............................................................................................................. 178
Figure 8.2 A rotor element with degrees of freedom (a) horizontal plane, (b) vertical
plane, (c) combination of horizontal and vertical ......................................................... 179
Figure 8.3 Schematic representation of the rotor .......................................................... 179
Figure 8.4 Coordinates of a point in two systems ......................................................... 181
Figure 8.5 Phase angles with respect to vertical and horizontal axes in cases of (a)
response taken at normal directions and (b) response taken at radial directions .......... 187
Figure 8.6 Comparison between the actual and estimated responses at (a) bearing 1 𝑟𝑘1 and (b) bearing 2 𝑟𝑘1, for run number 5: , actual ; , estimated ............................. 190
Figure 8.7 Comparison between the actual and estimated responses at (a) bearing 1 𝑟𝑘2 and (b) bearing 2 𝑟𝑘2, for run number 5: , actual; , estimated .............................. 191

LIST OF FIGURES
12
Figure 9.1 A rotor element with degrees of freedom (a) horizontal plane, (b) vertical
plane, (c) combination of horizontal, vertical and radial planes ................................... 197
Figure 9.2 (a) A simple schematic representation of the rig, (b) vibration measurement
directions of bearing pedestal at node 𝑘........................................................................ 199
Figure 9.3 Typical rotor mass unbalance distribution along the rotor length; (a)
continuous form of rotor mass unbalance, (b) discretized form of rotor mass
unbalance....................................................................................................................... 200
Figure 9.4 Photographs of the test rig with one balancing disc .................................... 206
Figure 9.5 Typical measured FRF plots of the rotor at distance of 42cm from bearing B1
in (a) vertical, (b) horizontal directions......................................................................... 207
Figure 9.6 Measured mode shapes of the rig, (a) mode 1, (b) mode 2, (c) mode 3 and (d)
mode 4 ........................................................................................................................... 208
Figure 9.7 A typical accelerometer installation at a bearing in 3 directions ................. 209
Figure 9.8 Demonstration of the added unbalance (mass and phase angle) ................. 210
Figure 9.9 Typical measured 1× displacement responses in vertical direction for the
machine runs 4 and 5 at bearings (a) B1 and (b) B2 ..................................................... 211
Figure 9.10 Grouped bar chart of the comparison between actual and estimated
unbalances by both the earlier and proposed methods, (a) mass and (b) phase angle .. 214
Figure 9.11 Photograph of the test rig with two balancing discs .................................. 215
Figure 9.12 Typical measured FRF plots of the rotor at distance of 53cm from bearing
B1 in (a) vertical and (b) horizontal directions ............................................................. 216
Figure 9.13 Measured mode shapes of the rig, (a) mode 1, (b) mode 2, (c) mode 3 and
(d) mode 4 ..................................................................................................................... 217
Figure 9.14 Typical measured 1× displacement responses in horizontal direction for the
machine runs 3 and 5 at bearings (a) B1 and (b) B2 ..................................................... 218

LIST OF NOMENCLATURES
13
LIST OF NOMENCLATURES
Notation Description
A : Area of shaft element
𝐴𝑛 : The shape of beam factor
CF : Foundation damping
𝐃𝑚 : Displacement vector during 𝑚𝑡ℎ machine run-up
𝐝𝑝 : Displacement vector during 𝑝𝑡ℎ machine run-up
E :Young’smodulus
𝑒0 : Residual rotor unbalance
𝑒𝑝 : Unbalance added to rig at 𝑝𝑡ℎ machine run-up
𝑒𝑞 : Unbalance added to rig at 𝑞𝑡ℎ machine run-up
funb : Unbalance force vector
𝑓𝑛 : Natural frequency in Hz
𝐺 : Gyroscopic vector
𝐺𝑑 : Gyroscopic matrix for the disc
𝐼 : The second moment of area
𝐼𝑑 : The diametral moment of inertia
𝐼𝑝 : The polar moment of inertia
𝐾𝐹 : Foundation stiffness
𝑀𝑑 : Balancing disc mass
𝑀𝐹 : Foundation mass
𝑚𝑠ℎ𝑎𝑓𝑡 : Shaft mass
𝐒 : Machine sensitivity
s : Cross-sectional area
𝐓 : Transformation matrix
𝑇 : Kinetic energy
U : Strain energy
𝑉𝑠ℎ𝑎𝑓𝑡 : Shaft volume
Z : Dynamic stiffness matrix
ρ : Material density
ω : Rotational speed in rad/sec
𝜁 : Damping ratio

LIST OF ABBREVIATIONS
14
LIST OF ABBREVIATIONS
Abbreviation Description
ADC : Analog to Digital Converter
BNC : Bayonet Neill–Concelman
DAQ : Data Acquisition
DOF : Degree of Freedom
EOM : Equation of Motion
FE : Finite Element
FRF : Frequency Response Function
HOS : Higher Order Spectra
IC : Influence Coefficient
ICP : Integrated Circuit Piezo-electric
MB : Modal Balancing
PCA : Principal Component Analysis
PC : Personal Computer
RPM : Revolution per Minute
SVD : Singular-Value Decomposition
STFT : Short-Time Fourier Transform
TG : Turbogenerator
USB : Universal Serial Bus
VCM : Vibration based Condition Monitoring

LIST OF PUBLICATIONS
15
LIST OF PUBLICATIONS
Journal publications
1. Ibn Shamsah, S., Sinha, J.K., Mandal, P. Precaution during the field balancing of
rotating machines. Journal of Maintenance Engineering 2016. 1(1), p.59-66.
2. Ibn Shamsah, S., Sinha, J.K. Rotor unbalance estimation with reduced number
of sensors. Machines, 2016. 4(19).
3. Ibn Shamsah, S., Sinha, J.K., Mandal, P. Reliable Machine Balancing for
Efficient Maintenance. Journal of Quality in Maintenance Engineering, Under review.
4. Ibn Shamsah, S., Sinha, J.K., Mandal, P. Rotor unbalance identification using
reduced sensors and data from single machine run-up. Journal of Sound and Vibration,
Under review.
5. Ibn Shamsah, M., Ibn Shamsah, S., Traditional In-Situ Gas Compressor Rotor
Balancing: A Case Study. Journal of Maintenance Engineering 2016. 1(1), p.297-304.
Conference publications
1. Ibn Shamsah, S., Sinha, J.K. Rotor unbalance estimation using a single machine
rundown with reduced number of sensors, Proceeding of the International Conference
on Engineering Vibration (ICoEV), Ljubljana, Slovenia, 2015.
2. Ibn Shamsah, S., Sinha, J.K., Mandal, P. Sensitivity analysis of in-situ rotor
balancing, Proceeding of the Vibration in Rotating Machinery (VIRM 11), Manchester,
United Kingdom, 2016.
3. Ibn Shamsah, S., Sinha, J.K., Mandal, P. Multi-planes rotor unbalance
estimation using influence coefficient method, Proceeding of the Twelfth International
Conference on Vibration Engineering and Technology of Machinery (VETOMAC XII),
Warsaw, Poland, 2016.
4. Ibn Shamsah, S., Sinha, J.K., Mandal, P. Application of model-based rotor
unbalance estimation using reduced sensors and data from a single run-up, Proceeding
of the 2nd
International Conference on Maintenance Engineering (IncoME II),
Manchester, UK, 2017.

ABSTRACT
16
ABSTRACT
The University of Manchester
Sami Meshal F Ibn Shamsah
PhD in Mechanical Engineering
"Enhancement of Field Balancing Methods in Rotating Machines"
2017
The influence coefficient (IC) method is an acceptable field balancing approach for
rotating machines. However, it is generally observed that the IC method often uses
vibration response acquired at single machine speed at bearing pedestals for the rotor
unbalance estimation for industrial applications. The estimated rotor unbalance may not
be accurate at a single speed either due to noise in the measured signal or measurement
at single speed not reflecting the machine dynamics accuratly or both. Therefore, an
improved unbalance estimation is proposed by using the IC method, but using vibration
measurements at multiple rotor speeds together in a single band to estimate rotor
unbalance accuratly. Sensitivity analysis of the proposed method is also carried out to
understand the dependency of adding more speeds in a single band on the accuracy of
unbalance estimation.
In the recent past, with the support of the advanced computer technology, the model-
based rotor fault identification approach has been introduced earlier. This method
requires vibration measurements of a single machine transient operation and reasonably
accurate numerical model of the rotating machine. Despite all the significant research
contributions towards the enhancement of the aforementioned two balancing methods
(i.e. IC and model-based approaches), they are currently applied using two orthogonal
vibration sensors per bearing pedestal. Therefore, this study proposes that the two
balancing methods can be enhanced by applying them with using only one sensor at a
bearing pedestal. The proposed balancing techniques are applied on experimental rigs
with single as well as multiple balancing planes. Also, several added unbalance
scenarios are used for both methods. The proposed rotor mass unbalance estimation
methods can estimate the rotor unbalance of different unbalance configurations
accurately for all cases. This indicates that the proposed unbalance estimation
approaches have the potential for future industrial application.

DECLARATION
17
DECLARATION
"I, Sami Ibn Shamsah, declare that no portion of the work referred to in the thesis has
been submitted in support of an application for another degree or qualification of this or
other universities or institutes of learning."

COPYRIGHT STATEMENT
18
COPYRIGHT STATEMENT
i. The author of this thesis (including any appendices and/or schedules to this thesis)
owns certain copyright or related rights init(the“Copyright”)andhe has given The
University of Manchester certain rights to use such Copyright, including for
administrative purposes.
ii. Copies of this thesis, either in full or in extracts and whether in hard or electronic
copy, may be made only in accordance with the Copyright, Designs and Patents Act
1988 (as amended) and regulations issued under it or, where appropriate, in
accordance with licensing agreements which the University has from time to time.
This page must form part of any such copies made.
iii. The ownership of certain Copyright, patents, designs, trademarks and other
intellectual property (the “Intellectual Property”) and any reproductions of
copyright works in the thesis, for example graphs and tables (“Reproductions”),
which may be described in this thesis, may not be owned by the author and may be
owned by third parties. Such Intellectual Property and Reproductions cannot and
must not be made available for use without the prior written permission of the
owner(s) of the relevant Intellectual Property and/or Reproductions.
iv. Further information on the conditions under which disclosure, publication and
commercialisation of this thesis, the Copyright and any Intellectual Property and/or
Reproductions described in it may take place is available in the University IP
Policy (see http://documents.manchester.ac.uk/DocuInfo.aspx?DocID=24420), in
any relevant Thesis restriction declarations deposited in the University Library, The
University Library’s regulations (see
http://www.library.manchester.ac.uk/about/regulations/) and in The University’s
policy on Presentation of Theses.

ACKNOWLEDGMENTS
19
ACKNOWLEDGMENTS
First and foremost, the author would like to praise God, the almighty for providing him
this opportunity and granting him the capability to proceed successfully. The author
wishes to sincerely thank the Government of the Kingdom of Saudi Arabia for granting
him a full scholarship under The Custodian of The Two Holy Mosques’ overseas
scholarship program. He would also like to thank most sincerely, Saudi Arabia’s
Ministry of Education and the Saudi Arabian Cultural Bureau in the UK for their
continued support throughout pursuing his PhD. Also, the author would like to extend
special thanks to his supervisor Professor Jyoti Kumar Sinha and co-supervisor Dr
Parthasarathi Mandal, who made this dissertation come into being. They are not only his
advisers, they are also his mentors who gave their endless support and helped him to go
through all the difficulties he came across during his PhD study. He would also like to
acknowledge Dr Akilu Kaltungo and Dr Adrian Nembhard who helped him during his
research. And last but not least, the author would like to thank all technicians who
worked in Pariser Building workshop, especially Mr David Jones and Mr Anthony
Williams, for their support while conducting the experiments.

DEDICATION
20
DEDICATION
This thesis is dedicated to my mum Afra, dad Meshal, uncle Mamdouh, wife Amal,
daughter Al Jawhara, sisters, brothers and friends.
For their endless love, support and encouragement

CHAPTER 1 INTRODUCTION
21
CHAPTER 1
INTRODUCTION

CHAPTER 1 INTRODUCTION
22
General introduction 1.1
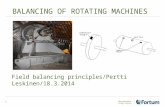
In the construction of typical rotating machinery such as gas turbine, rotor, bearings and
foundation are often considered as the major components (Figure 1.1). The rotating
shaft and all other rotating parts connected to it such as gears, couplings and impellers
are commonly known as the rotor. Fluid filled journal bearings or rolling-element
bearings are typically used to support the rotor. The term foundation, also known as
machine supporting structure, is used to describe all components that are located
underneath the bearings but linked with them [1]. Rotating machines are considered as
the bedrock of most industries such as oil and gas power plants, mining, aerospace, and
chemical factories as they play a vital role in many activities. Therefore, the reliability
of this class of machines is essential to these industries. During the last few decades, a
growing body of research has emerged with the aim to enhance the reliability of rotating
machines.
Figure 1.1 (a) Photograph of a 9HA gas turbine rotor on the half shell casing [2], (b) block
diagram of the turbine in part a
The achievement of the desired reliability targets of industrial rotating machines is often
hampered by the existence of various rotor-related faults [3-5]. Most of these faults are
unpreventable due to a number of reasons such as manufacturing/installation
imperfections, inappropriate commissioning and wears and tears owing to day-to-day
operations [6-9]. Malfunctions in rotating machines may lead to damage in critical parts
of the machine or even worse, cause catastrophic damages to the entire machine, which
Bearing Bearing …
𝐟𝑅
𝐟𝐹
(a) (b)

CHAPTER 1 INTRODUCTION
23
has safety implications as well as economic considerations. It is to this end that the early
detection and reliable diagnosis of rotor faults in their initial stages have become
essential in industries to enhance machine reliability and maintenance cost
effectiveness. Recently, significant efforts have been made by manufacturing companies
to implement effective machinery maintenance programs that can detect and diagnose
rotor faults at their initial stage.
Although there are various commonly encountered rotor-related faults, rotor mass
unbalance is one of the most common malfunctions in rotating machines which
repeatedly occurs throughout their operations [10]. This stimulus develops when the
mass is asymmetrically distributed around the axis of rotation [11]. If the machine
vibration due to rotor mass unbalance exceeds the allowable limit, it may lead to
machine failure. As a consequence, machine downtime and unscheduled maintenance
actions will be required, which in turn influence the operating cost negatively. Also,
high levels of machine vibrations due to rotor mass unbalance may result in a
significant cutback of the machine fatigue life [12]. Therefore, the regular field
balancing is essential to keep machine vibration within an acceptable level, and hence
ensure safe machine operation and long service life [13].
Numerous vibration based rotor balancing techniques have been proposed in the
literature [14-17]. For different reasons, only a few of these balancing methods are
acknowledged by practising balancing engineers. Some of these methods are relatively
involved and mandate judgment from highly skilled engineers with thorough knowledge
of rotor dynamics. One of the most popular rotor balancing techniques in industries is
the influence coefficient (IC) balancing method. This balancing approach has some
advantages such as simplicity and high efficiency, which make it suitable for a broad
range of industrial rotating machines. In addition, the IC balancing method does not
require any prior knowledge of the underlying dynamics of the machine. It only requires
the vibration response of the machine at different trial masses to define the correction
weights. One machine’s transient operation with residual unbalance plus one machine’s
transient operation per balancing plane are needed to balance the rotor using the IC
balancing approach. A survey of the literature of the IC balancing method was presented
by some authors [18, 19].

CHAPTER 1 INTRODUCTION
24
With the development of the modern computer technology, the model-based rotor
balancing method has been introduced. This balancing approach relies on accurate
numerical models of some parts of the rotating machine as well as measured vibration
response from a single machine’s run-up/run-down [20]. The finite element (FE)
method has been found to be the most appropriate tool for the numerical modelling in
structural engineering today [21]. Often, an accurate mathematical model of the rotor
and approximate numerical model of the bearings can be constructed using the FE
method. Considerable research has been done on the applications of the model-based
rotor balancing method [22-24].

CHAPTER 1 INTRODUCTION
25
Motivations 1.2
Rotor mass unbalance is one of the most commonly encountered malfunctions in
rotating machines which occurs due to several reasons including corrosion, deposition
of dirt on rotors, manufacturing imperfections, cracked fans, incorrect keyways, etc.
Therefore, regular balancing of rotating machines is imperative to ensure safe machine
operation. Several rotor balancing techniques have emerged over the years, and a review
of these techniques indicates that their applications are often time-consuming due to the
requirement of multiple measurement locations. Consequently, the development of an
approach that simplifies rotor balancing through the rationalisation of measurement
locations could be useful to industries.

CHAPTER 1 INTRODUCTION
26
Aims and objectives 1.3
The ultimate aim of this research project is to enhance the field balancing methods in
rotating machines. To achieve this goal, the following research objectives are needed to
be fulfilled:
1. To experimentally investigate the effectiveness of the application of the
influence coefficient balancing method using vibration measurements acquired
at multiple speeds in a single band.
2. To propose and experimentally examine the effectiveness of the application of
the influence coefficient balancing method using vibration measurements at
multiple machine speeds from only one vibration sensor per bearing pedestal.
3. To develop a model-based method for identifying rotor mass unbalance using
single vibration sensor per bearing pedestal and single machine’s transient
operation (run-up/run-down).

CHAPTER 1 INTRODUCTION
27
Research contributions 1.4
The current industrial applications of IC method generally use vibration measurements
at a single machine speed for the rotor unbalance estimation. The measured vibrations at
a single machine speed do not adequately reflect the dynamics of the rotor and might
include a high level of noise. As a consequence, applying the IC method using vibration
measurements at a single machine speed might not provide an accurate estimation of the
rotor mass unbalance and hence results in a bad balancing. Therefore, as mentioned in
the first aim of the thesis, the first contribution of the current research project is the
enhancement of the rotor mass unbalance estimation by applying the IC method using
vibration measurements acquired at multiple rotor speeds in a single band instead of
single rotor speed.
Both IC and model-based balancing techniques are currently applied using pair of
vibration sensors mounted orthogonally at each bearing pedestal [25, 26]. Therefore,
applying these methods on vast and complex rotating machines with a large number of
vibration sensors could be overwhelming as well as significantly relying on a highly
skilled engineer with sound knowledge of rotor-dynamics during data analysis.
Moreover, high cost related to the maintenance of the monitoring system is required.
Thus, as mentioned in the second and third aims of the thesis, the second contribution of
the current research project is to enhance the existing IC and model-based unbalance
identification approaches by using significantly reduced number of sensors.

CHAPTER 1 INTRODUCTION
28
Layout of thesis 1.5
The thesis is written in the alternative format with its main content presented in the form
of published/submitted research papers of the candidate’s own work. Same as the
traditional format, Chapter 2 provides a review of literature related to this research
project, Chapter 3 describes the experimental setup and instrumentation, and Chapter 4
explains the mathematical modelling and signal processing. However, Chapters 5-9
present the published/submitted research papers. The last Chapter includes the
concluding remarks and possible future work. Further details of the outline are
provided:
Chapter 2 gives a review of literature related to this research project. It starts by
reviewing literature pertaining to the modal balancing method. Then, the IC unbalance
estimation method is discussed and some research papers on this topic are reviewed.
The unified balancing approach which combines both modal balancing and IC
balancing approaches is, then, reviewed. After that, a brief literature review on the
model-based rotor unbalance identification method is given.
Chapter 3 describes the experimental setup. The main elements of the laboratory rig as
well as the Data Acquisition (DAQ) system are described. Then, the modal testing
procedure and results are provided.
Chapter 4 explains the detailed steps of modelling a typical rotating machine. Then, it
gives a brief idea about signal processing and briefly presents the concepts of the 3D
waterfall plot, order tracking and Bode plot.
Chapter 5 presents the application of the IC unbalance estimation approach using
vibration data acquired from a test rig with a single balancing plane at a single rotor
speed as well as wide range of speeds during machine run-up.
Chapter 6 applies the same approach explained in Chapter 5 but using vibration data
acquired from an experimental rig with multiple balancing planes during machine’s
transient operation.

CHAPTER 1 INTRODUCTION
29
Chapter 7 introduces the application of the IC unbalance estimation technique using
reduced number of vibration sensors (i.e. 1 sensor at a bearing pedestal instead of pair
of sensors arranged in orthogonal directions). The concept is applied experimentally on
laboratory rigs with single as well as multiple balancing planes.
Chapter 8 applies the model-based unbalance estimation approach on a numerically
simulated rotating machine with reduced number of sensors and single machine’s
transient operation.
Chapter 9 provides an experimental validation to the proposed model-based unbalance
estimation method. The method is applied on test rigs with single as well as multiple
balancing planes.
Chapter 10 addresses the possible conclusions of the present research, summarising the
main findings and contributions. A closure is given, while possibilities for future
research are provided.
A graphical abstract of the layout of the thesis is illustrated in Figure 1.2.

30
CH
AP
TE
R 1
INT
RO
DU
CT
ION
Concluding remarks and future research 10
IC balancing (measurements at
multiple speeds in a single band,
2 directions/pedestal, 1 disc)
5 IC balancing (measurements at
multiple speeds in a single band,
2 directions/ pedestal, 2 discs)
6 IC balancing (measurements
at multiple speeds in a single
band, 1 direction/ pedestal)
7
Model-based balancing of
simulated rotor (measurements
at 1 direction, 1 disc)
8
Experimental validation of the
proposed model-based method
9
Single
disc
Double
discs
Modal
tests Test rigs
Modal
balancing
IC
balancing
Unified
approach
Model-based
approach
Signal
processing Rotor FE
modelling
Enhancement of Field Balancing Methods in Rotating
Machines
Introduction 1 Review of relevant
literature
2 Numerical modelling and
signal processing
4 Experiments
3
Instrumentation Rig layout
Natural
frequencies
Mode
shapes
Figure 1.2 Graphical abstract of the thesis layout

CHAPTER 2 LITERATURE REVIEW
31
CHAPTER 2
LITERATURE REVIEW

CHAPTER 2 LITERATURE REVIEW
32
Introduction 2.1
A review of background literature and research papers relevant to the current research project
is given in this chapter. The chapter starts by reviewing the literature concerning the modal
balancing method (Section 2.2). This is followed by a review of research into IC balancing
method (Section 2.3). Special attention is, then, devoted to papers dealing with the unified
balancing approach which combines modal balancing and IC balancing approaches (Section
2.4). Finally, a comprehensive review of literature pertaining to the mathematical model-
based rotor unbalance identification techniques is presented in Section 2.5.
Modal balancing approach 2.2
In the modal balancing approach, each mode is balanced individually starting with the lowest
mode. The number of machine runs required for rotor balancing mainly depends on the
number of modes that are needed to be balanced. To balance the first mode, two machine
runs are required; one run with residual unbalance and one run with added mass unbalance.
Then, extra run is required for balancing of each of the higher modes [27]. The balancing
mass of each mode is carefully chosen to avoid upsetting the previously balanced modes. The
combined effect of the added masses should not have any effect on the previously corrected
modes [27].
Literature reviews on the modal balancing approach were presented by some authors [28-30].
In the 1960s, Bishop, Gladwell and Parkinson presented a number of papers [31-34] that have
outstanding contributions to the theory and application of the modal balancing approach. The
theoretical background of the flexible rotor balancing, mode by mode, was discussed by
Bishop and Gladwell [31]. First, they investigated the balancing of rigid rotating machines at
low speeds mathematically. Then, they considered the balancing of flexible rotating
machines. They provided an example of balancing a uniform shaft in two modes. They also
investigated the influence of a slightly bent shaft as well as the influence oftheshaft’sweight
on the balancing process.
The procedure of isolating whirl modes for accurate balancing was discussed by Bishop and
Parkinson [33]. In this approach, the rotor runs at a speed that is close to the critical speed in

CHAPTER 2 LITERATURE REVIEW
33
order to amplify modal distortion in a certain mode. The proposed balancing approach was
applied on small size test rigs as well as real rotating machines. The authors highlighted some
limitations of this rotor balancing approach. To overcome the shortcomings of the proposed
balancing approach, they adapted the technique of resonance testing which was firstly
published by Kennedy and Pancu [35].
Parkinson and Bishop [34] presented the problem of the vibration due to residual unbalance
in the rotor after applying the modal balancing. They proposed that the residual vibration of
rigid rotors (i.e. run below their first critical speed) can be balanced by adding a single mass.
The method was illustrated on a rotor of boiler feed pump. The application of the modal
balancing technique on large rotating machines with flexible foundation was discussed by
Lindley and Bishop [36]. Demonstration of the application of the method on various rotating
machines such as pumps and turbomachines was presented by Moore and Dodd in three
different papers [37-39].
Some researchers proposed modal balancing approaches that do not require trial masses or
test runs [40-44]. Gnielka [40] extended a modal balancing technique which was originally
proposed by Gasch and Drechsler [45] to balance a rotor that was initially bowed. This
method does not require any test runs; it only requires a pre-knowledge of the flexural mode
shapes of the rotor as well as the generalised masses. First, the rotor is run in the vicinity of
the first critical speed, and the machine vibration response is acquired. Then, the differential
equation of motion of the bowed shaft is solved using the frequency response function (FRF).
As the system is non-linear, trial and error process was used and the unbalance was identified
by using the least square technique. Also, Morton [41] proposed a modal balancing method
that does not require trial masses. He was able to identify the bearing model by calculating
the shaft response function. This technique is applicable for all types of bearings and can be
used on rotors with multiple bearings.
Some researchers [46, 47] developed a modal balancing approach that can perform balancing
during the operation of the rotating machine. Lee and Kim [46] have used balancing head
which consists of single/multiple discs that are assembled to the shaft and carry correction
masses. First, the machine vibration response is measured, and then the correction masses
move while the rotor vibrates to balance the machine. The rotor unbalance is controlled
manually by a controller that monitors the whirl data of the shaft on an oscilloscope. The

CHAPTER 2 LITERATURE REVIEW
34
oscilloscope, then, transmits the magnitude and direction of the signals to the balancing head.
The magnitude of the signal is changed by rotating the balancing discs in opposite directions.
After adjusting the magnitude, the discs are rotated together to change the direction. The
method was applied to a test rig, and the balancing head was successfully able to balance the
rotor during operation at various speeds. Later, Lee et al. [47] improved this balancing
approach by automatically controlling the balancing head through software on a personal
computer. The experimental results prove the effectiveness of the modified modal balancing
approach.
Deepthikumar et al. [48] used a method that was initially developed by Yang and Lin [49] for
modal balancing of a flexible rotor with single balancing plane that has distributed mass
unbalance and bow. First, they applied the method to a numerical model. Then, they validated
the simulation results experimentally. They were able to balance the rotor with measured
machine vibration below the first critical speed. They also introduced the concept of
quantifying thedistributedunbalanceusing‘Norm’ofeccentricitypolynomial function.To
apply this method efficiently, a fairly accurate numerical model of the rotor is required.
Notwithstanding the fact that the modal balancing method requires fewer trial runs than the
influence coefficient balancing method and is not very complicated in principle, applying it
on large and complex rotating machines such as turbogenerator (TG) set is not straight
forward and requires an engineer with a sound knowledge of rotor dynamics. A full list of the
shortcomings of the modal balancing approach was presented by Darlow [50].
Influence coefficient balancing method 2.3
Over the years, many rotor balancing techniques have been proposed in the literature [29, 51,
52]. Amongst all vibration based rotor balancing techniques, the most predominant approach
is the influence coefficient (IC) balancing method [21, 53]. IC balancing method is also
known as field balancing, because the balancing is performed at the site without
disassembling rotor from the machine. In this balancing approach, the rotor system is
assumed to be linear, and the influence of the individual unbalances can be superposed to
give the influence of a set of unbalances [29]. In addition, the IC method does not require any
prior knowledge of the dynamics of the rotor [17]; it requires only the vibration response of
the rotor at different trial masses.

CHAPTER 2 LITERATURE REVIEW
35
The number of test runs required to perform balancing using the IC method depends mainly
on the number of balancing planes [21]. In the case of a rotor with one correction plane, two
transient machine operations are needed to obtain the influence coefficients and hence
identify the rotor mass unbalance. The first machine’s transient operation is carried out with
residual unbalance (known as reference run) and the second machine’s transient operation is
carried out with added correction weight. An extra machine’s transient operation is required
for each additional correction plane. Therefore, due to its simplicity and high efficiency, the
IC balancing method has become the conventional field balancing approach in most
industries around the world.
To enhance understanding of the IC unbalance estimation approach, assume a simple rotating
machine which consists of shaft that is supported on flexible foundation through two bearings
at its ends and carries a single balancing plane at the midspan between the bearings. Assume
that the machine runs at 𝑓𝑘 Hz and the displacement is measured at both bearing pedestals in
the vertical and horizontal orthogonal directions. In order to evaluate the sensitivity of the
machine, the displacements are measured in two different run-ups or run-downs, i.e. the first
run with residual unbalance only and the second run with residual unbalance plus added mass
unbalance. Thus, the sensitivity matrix is written as follows,
𝐒 = [𝐝1(𝑓𝑘)−𝐝0(𝑓𝑘)
𝑒1] (2.1)
where 𝑒1 is added unbalance to the balancing plane at the 2𝑛𝑑 machine run-up, and
displacement vectors 𝐝0(𝑓𝑘) as well as 𝐝1(𝑓𝑘) can be written as:
𝐝0(𝑓𝑘) = [y1,0(𝑓𝑘) x1,0(𝑓𝑘) y2,0(𝑓𝑘) x2,0(𝑓𝑘)]T
𝐝1(𝑓𝑘) = [y1,1(𝑓𝑘) x1,1(𝑓𝑘) y2,1(𝑓𝑘) x2,1(𝑓𝑘)]T
(2.2)
where y1,0 and x1,0 are the displacements at the 1st bearing pedestal in the vertical and
horizontal directions respectively for the 1st machine run, similarly the displacements y2,0 and
x2,0 at 2nd
bearing. Same thing applies to y1,1, x1,1, y2,1 and x2,1. The sensitivity matrix
together with the vibration measurements acquired at thefirstmachine’stransientoperation
are used to obtain the residual rotor mass unbalance 𝑒0 as shown in the following equation

CHAPTER 2 LITERATURE REVIEW
36
[𝐒]4×1[𝑒0]1×1 = [𝐝0]4×1 (2.3)
Thus,
𝑒0 = [( 𝐒T𝐒)
−1𝐒T]𝐝0 (2.4)
When adding more balancing planes to the rotating machine, then more machine run-ups/run-
downs with adding mass unbalance to each run are required for balancing.
Comprehensive reviews of literature pertaining to the IC balancing method were conducted
by Darlow [29] and Zhou and Shi [19]. The IC balancing approach was firstly proposed in
the 1930s by some researchers [54, 55]. Thearle [54] has explained the application of the IC
method with referring to the balancing of a turbogenerator, which consists of two rotors that
are supported by multiple bearings. Sinha [17] has explained the IC method for single/
multiple balancing planes in details in his book. He also presented graphical and
mathematical approaches and provided some examples to enhance understanding. Friswell et
al. [21] provided a detailed explanation of the IC balancing method and introduced the
theoretical background of the method. Moreover, they gave few examples on the application
of the IC balancing method. They also compared the IC balancing approach with the modal
balancing approach, and discussed the advantages and limitations of each balancing method.
Hopkirk [55] formulated the two-plane, two-sensor, single-speed balancing procedure using
influence coefficients in the manner as most modern methods. He presented an analytical
solution to solve for the required balancing mass using only the amplitude information from
the measured vibration response. In 1964, Goodman [56] presented a least square approach to
extend the technique to multi-plane balancing using data from different machine speeds and
measurement locations. His method was refined in 1972 by Lund and Tonnesen [16] and
verified in the same year by Tessarzik et al. [57].
In his book, Den Hartog [58] briefly discussed the IC technique for two balancing planes.
Grobel [59] was able to balance a large rotating machine mode by mode using the IC
approach. Church and Plunkett [60] presented a technique that can generate the influence
coefficients without trial masses. The method relies on using a shaker to excite the rotor at
zero revolutions per minute (RPM). The theory was tested on a flexible rotor that was

CHAPTER 2 LITERATURE REVIEW
37
supported by stiff rolling-element bearings. However, research done by Tonnesen [61]
showed that applying this method on a real rotating machine is not straight forward and does
not provide reliable results. Therefore, this approach would not be practical for field rotor
balancing.
Rieger [62] developed a computer program for balancing rotors. In his program, he studied
the effectiveness of the IC balancing method analytically. He examined three practical rotor-
bearing systems in his study (i.e. rigid rotor supported by fluid film bearings, supercritical
flexible three-disc overhung rotor supported by fluid film bearings and supercritical three-
bearing rotor with one disc overhung supported by fluid-film bearings). The balance
improvement with two, three and four balancing planes was also studied. He showed that the
number of bearing supports does not have any influence on the quality of balancing. Rieger
also examined the impact of measurement errors and installation of correction weight on the
quality of the obtained balance.
LeGrow [63] used a numerical model to get the influence coefficients of an actual rotating
machine. Despite the fact that this approach can save time and money, it could not balance
the tested rotor adequately. The author also presented a method for balancing rotors which is
similar to the IC method. He first mentioned the purpose of rotor balancing and difficulties
introduced by flexible rotors. LeGrow concluded that the weighted least square IC procedure
is not very practical because it is time-consuming and requires many machine runs.
The different approaches for multiple-speeds and multiple-planes balancing using the IC
method were presented by Badgley [64]. He described the IC method and gave some notes
regarding the rotor balancing process in practice. Moreover, the author mentioned that the
machine downtime is the main source of the high cost involved in the in-situ rotor balancing.
Therefore, he proposed that the best way for reducing the machine downtime is to determine
the calibration weight while the machine is running, and then shut it down only long enough
to install the calibration weight. However, the author did not provide an explanation
regarding the way of calculating the calibration weight without shutting the rotating machine
down. Moreover, he discussed the error caused by the use of the electronic equipment;
Badgley advised using the mean value of every parameter for the sake of increasing the
effectiveness when determining the correction weight.

CHAPTER 2 LITERATURE REVIEW
38
An extended test program for the evaluation of the validity of the IC technique was carried
out by Tessarzik, Fleming, Badgley and Anderson [65-67]. The outcomes of seven
experimental tests concerning the balancing of an experimental rig were discussed in the last
paper [67]. The rig was operating over the full speed range and covering four critical speeds.
Two of the four critical speeds did not require balancing as they were heavily damped. The
other two critical speeds were lightly damped, and hence required balancing. Generally, the
method was found to be effective for all critical speeds.
In one of the experimental tests, the authors attempted to balance the fourth critical speed
without including the measured vibration data from the first critical speed. They found that
the fourth critical speed was improved, but only at the cost of the vibration level at the first
critical speed. When they used all vibration data, including data from the first critical speed,
to balance the fourth critical speed, no significant increase in the vibration level was detected
at the first critical speed.
Ling and Cao [68] presented frequency response functions (FRFs) for analysing the
relationship between the FRFs and ICs theoretically as well as deriving the corresponding
mathematical equations for balancing high-speed rotors. Furthermore, they have analysed the
relationships between the mass unbalances and FRFs. The analyses were based on the modal
balancing (MB) technique along with the equations related to dynamic and static unbalance
masses. They have conducted some experiments on a high-speed rotor to validate the theory.
It was found that the experimental results were in good agreement with the analytical
solution.
Kang et al. [69] derived a formulation of IC matrices from the motion equations of nonlinear
rotors by using the finite element (FE) method and complex coordinate representation. An
algorithm of plane separation was formulated based on the exact point IC technique. Using
the inference from two and three-plane separation, they introduced a generalised technique
for multiple-plane separation for balancing rigid rotors. The authors provided some examples
to validate their work.
Yu [70] as well as Lee et al. [71] used the IC method to estimate the rotor unbalance at a
constant rotor speed. Zhou et al. [72] were successfully able to balance a rotor-bearing
system using the IC method during varying speed period. Dyer and Ni [73] have extended the

CHAPTER 2 LITERATURE REVIEW
39
IC technique to the active control and on-line estimation. In their study, they have
successfully implemented an adaptive control scheme that combines flexible rotor balancing
method and the on-line estimation of the IC using an active balancing system. Recently, Xu
et al. [74] have used the IC method to balance a rigid rotor in two balancing planes. They
have used cross-correlation method to extract the fundamental frequency signal. They were
successfully able to reduce the vibration level by around 90% with a total of four machine’s
transient operations.
It can be observed from the reviewed literature that the IC balancing method is applied using
vibration measurements acquired at a single rotor speed. The measured vibrations at a single
rotor speed possibly do not fully reflect the dynamics of the rotating machine and might
include a high level of noise. Therefore, applying the IC method using vibration
measurements at a single rotor speed may not provide an accurate estimation of the rotor
mass unbalance, and hence could result in a bad balancing. Therefore, an opportunity exists
to enhance the efficiency of the conventional IC balancing method by using vibration
measurements acquired at multiple rotor speeds in a single band, instead of individual single
speeds.
The previously proposed influence coefficient methods were applied with using multiple
sensors mounted orthogonally at a bearing pedestal. In the case of large and complex rotating
machines with multiple shafts like the industrial steam turbine, the rotor is usually supported
through a substantial number of bearing pedestals. Accordingly, a large number of sensors is
used to collect the vibration response of the machine. Hence, huge amounts of data sets are
generated during rotor unbalance diagnosis, which could be overwhelming as well as
significantly relying on experience and engineering judgment during data analysis.
Furthermore, considerable time and effort are required to identify the severity of the acquired
information. Moreover, an additional cost related to the maintenance of the monitoring
system is needed.
Notwithstanding that the IC balancing method is almost a mature and well suited to be
applied in most industries, the author found an opportunity of developing the currently used
IC method by reducing the number of sensors without necessarily compromising the valuable
information required for the diagnosis and prognosis of rotor mass unbalance. This
improvement is certainly of great benefit to any industry as it reduces the time needed for the

CHAPTER 2 LITERATURE REVIEW
40
complex signal processing and also minimises the maintenance cost effectively. In addition,
the significant reduction in the number of sensors will considerably reduce the probability of
tripping the machine because of false alarms, which occur as a result of faulty sensors. The
idea of reducing number of sensors is not new in the field of condition monitoring as it was
applied by several researchers for the identification and diagnosis of several rotor faults [75-
82]. Some of the proposed condition monitoring methods that use a reduced number of
vibration sensors are reviewed in the next three paragraphs.
Yunusa-Kaltungo et al. [76] have explored the use of the combined bispectrum and
trispectrum with one accelerometer mounted at 45-degree to vertical/horizontal directions at
each bearing location for diagnosing different rotor faults. The rotor faults analysed are
misalignment, crack and rotor/stator rub. The method has been applied on an experimental rig
with artificial rotor faults. They have been able to distinguish between the healthy and faulty
conditions. Furthermore, it has been found that the rotor malfunctions may be identified by
merging the bispectrum and trispectrum components.
Nembhard et al. [77] have presented multiple rotor faults diagnosis method that uses one
accelerometer and one K-type thermocouple at a bearing pedestal. In order to get accurate
temperature readings, the thermocouples were mounted between the bearing casing and
outside of the outer race of each bearing. The method has been applied on a test rig which
consists of two rigidly coupled shafts supported by four rolling-element bearings. The faults
discussed were coupling misalignment, cracked rotor and rotor rub. After comparing the
vibration response spectrums of the healthy and faulty conditions, it has been found that the
1× (i.e. one multiplied by the rotating frequency) component of the faulty spectrum was
significantly higher than the healthy one. Therefore, they have been successfully able to
indicate the presence of fault conditions. Moreover, by combining the principal component
analysis (PCA) with vibration and temperature measurements in the analysis, they have been
able to classify the different faults successfully and also have got useful information on the
faults severity.
Sinha et al. [79] have proposed a vibration-based method that uses higher order spectra
(HOS), namely bi-spectrum, to identify two faults (i.e. shaft rub and shaft misalignment).
They have used the same laboratory rig that was used by Yunusa-Kaltungo et al. [76] and
Nembhard et al. [81]. The method is based on the fusion of vibration response from all

CHAPTER 2 LITERATURE REVIEW
41
vibration sensors in the frequency domain, in order to have a composite spectrum for a
rotating machine and then the computation of HOS. In their method, they have reduced the
number of vibration sensors to a single sensor at a bearing pedestal. The theoretical and
experimental results have shown good agreement.
Unified balancing approach 2.4
Both of the main balancing approaches (i.e. modal balancing and IC balancing methods) have
advantages as well as shortcomings. For example, the modal balancing approach has the
advantage of using less sensitivity runs at high rotor speed. However, applying this method
on complex rotating machines effectively mandates a highly skilled engineer with a good
knowledge of machine dynamics. Moreover, modal balancing approach depends on the
assumption of planar modes which may not be valid for systems with significant damping or
bearing cross-coupling effect. Similarly, the IC balancing approach has the advantage of
being linear and not requiring much pre-knowledge of the physics of the rotor system, and
disadvantage of suffering from the reliance on a significant number of sensitivity runs at high
machine speeds.
On the light of the aforementioned discussion, some researchers [83-87] proposed a unified
balancing approach that combines both modal balancing and influence coefficient balancing
methods. The unified balancing approach combines the advantages and avoids the limitations
of both modal balancing and IC balancing methods. In this balancing approach, the modal
trial mass sets are calculated such that they do not disturb the previously balanced critical
modes. The trial and balancing weights are obtained from influence coefficients that are
determined from experimental tests. Basically, the unified balancing approach does not rely
on the assumption of planar modes [29]. Also, this balancing method usually can be
automated.
Foils et al. [88] presented a literature review on the unified balancing method. Darlow [29]
has specified a chapter in his book for the unified balancing approach; he explored the
method and discussed the theoretical background and explained the procedure for the
application of the method. Parkinson et al. [89] provided a theoretical introduction to the
unified balancing approach and listed the advantages of the proposed balancing method.
Later, Darlow [50] presented the analytical basis and detailed procedure of implementing the

CHAPTER 2 LITERATURE REVIEW
42
unified balancing approach. In addition, he reported an experimental validation of the
proposed balancing approach. Zorzi et al. [90] proposed an optimised unified balancing
approach that avoids the restrictions imposed by former unified balancing methods. Unlike
previous approaches, this approach allows the application of weight constraints at any
balancing speed including the critical speeds. The experimental results showed that the
proposed method is feasible for high-speed rotor balancing.
Tan and Wang [91] presented a mathematical approach that unifies the two most popular
balancing methods (i.e. modal balancing and influence coefficient balancing methods). They
applied the proposed approach to the low-speed balancing of flexible rotating machines. They
have discussed the conditions of balancing flexible rotors at low speeds without the need of
high-speed rotor balancing. However, no attempts have been made for validating the
proposed method experimentally. Kang et al. [92] presented a modified unified balancing
approach for unsymmetrical rotor bearing systems. They formulated the modified unified
approach from FE equations of a rotor, and they took into account the unequal properties of
the rotating parts of the machine as well as the asymmetry of bearings. Furthermore, they
provided some examples to verify the validity of the proposed balancing approach.
Mathematical model-based rotor balancing technique 2.5
In the recent past, with the support of the advanced computer technology, the model-based
rotor fault identification approach has been introduced [93-95]. In this approach, a priori
information about the system is analytically included in the identification process. Therefore,
unlike the signal-based approaches, the mathematical model-based rotor malfunction
identification approaches utilise all information concerning dynamic and health of the
machine parts [96]. Thus, the rotor faults can be identified faster and more accurately and
reliably than the traditional methods. The model-based method requires an accurate
numerical model of the rotating machine for the identification and quantification of the rotor
faults [97]. The FE method has been found to be the most appropriate tool for the numerical
modelling in structural engineering today [27]. This section is divided into two sub-sections,
where the first sub-section presents the model-based rotor balancing approaches that use the
complete mathematical model of the rotating machine, and the second subsection presents the
model-based rotor balancing approaches that use reduced mathematical model of the rotating
machine.

CHAPTER 2 LITERATURE REVIEW
43
2.5.1 Model-based rotor balancing using full mathematical model
Some researchers presented model-based unbalance estimation approaches that use the full
numerical model of the machine (i.e. including rotor, bearings and foundation) [98-100].
Comprehensive surveys of literature on model-based rotor faults diagnosis methods,
including rotor unbalance, with rich bibliography are given by Parkinson [101], Foiles et al.
[88] and Edwards et al. [28]. Recently, Lees et al. [102] presented an updated review of
literature on the model-based balancing approach and stated the possible future trends.
Bachschmid and Pennacchi [103] proposed a model-based rotor fault diagnosis method that
requires the full mathematical model of the rotating machine. They have applied the proposed
method on small size laboratory rigs as well as real rotating machines. The faults analysed in
the proposed balancing method were rotor mass unbalance, radial/angular misalignment,
crack and thermal bow. They were able to distinguish between the various faults that generate
alike symptoms. Furthermore, the identification and location of the rotor unbalance in a 125
MW gas turbogenerator set that has a length of around 20 meters and supported by four oil
film bearings was reasonable. The mathematical modelling of the foundation was difficult
owing to the existence of some local resonances. This shortcoming contributes to the
weakness of the numerical model which eventually affects the accuracy of the estimated rotor
unbalance.
Markert et al. [104] and Bachschmid et al. [105] presented a multiple fault estimation method
(including rotor unbalance) that uses the full numerical model of the rotating machine and
permits the online identification of rotor faults. According to their proposed method, the
models of the rotor faults are defined as equivalent loads. The equivalent loads are virtual
force or moment systems that generate similar behaviour to the damaged rotating machine.
The least squares fitting algorithm in the frequency domain was used with the model-based
diagnostic method to obtain information about the location and extent of the different rotor
fault types. The proposed method was validated experimentally.
Jain and Kundra [106] presented a method that uses the full mathematical model of a small
test apparatus with two discs and supported by two bearings for the identification of multiple
faults, namely rotor mass unbalance and transverse fatigue crack. To calculate the equivalent
loads from the mathematical model, it is required to have the measured vibrations of all

CHAPTER 2 LITERATURE REVIEW
44
degrees of freedom (DOFs) of both the damaged and undamaged systems. As the vibration
response is acquired at a limited number of DOFs in practice, they have applied the modal
expansion method to estimate the full vibrational state of the system. Similar to the
aforementioned references (i.e. [104] and [105]) they have applied the least square approach
in order to fit the theoretical equivalent loads from the fault models into the equivalent loads
from the acquired data. The error involved in the identified rotor malfunctions is probably
caused by the estimation of the non-measured data.
Bachschmid et al. [107] presented a model-based unbalance identification approach. The
proposed method was applied to a 28 meters long turbogenerator set which consists of two
turbines (i.e. high-intermediate pressure and low pressure) and one generator that are rigidly
coupled. The supporting structure of the steam turbine was represented by a modal model
which is coupled to the rotor via the mixed co-ordinate technique. In a different publication
[108], they applied the same model-based identification approach on a different industrial
turbogenerator set which was affected by a rub in the sealing. Although the models of the
rotating machines were not fine-tuned, the proposed method was able to identify both faults
efficiently.
2.5.2 Model-based rotor balancing using reduced mathematical model
In the last few decades, as the turbo-machinery size has increased significantly, most
industries have replaced the massive and costly concrete foundations with lightweight
flexible supporting structures such as the fabricated steel structures. The reason is that the
fabricated steel structures are generally cheaper, easier to build and increase the space for
auxiliary equipment below the main machine [102, 109]. It has been found that the
lightweight machine’sfoundation considerably influence the dynamic behaviour of the entire
rotating machine system [26, 102, 109-113]. Thus, the effect of the flexible supporting
structure of the rotating machine should be taken into consideration in the routine condition
monitoring and the associated maintenance strategy. Neto et al. [114] have highlighted the
effects of the flexible foundation on the rotating machine by presenting some real case
studies.
Based on the above discussion, it could be asserted that the availability of a sufficiently
accurate foundation model is extremely useful for efficient operation and rotor fault
diagnosis. However, using the theory to construct a reliable and accurate complete

CHAPTER 2 LITERATURE REVIEW
45
mathematical model of the industrial rotating machines is an elusive task. This is due to many
uncertainties such as the huge number of joints [115]. Therefore, the most reliable approach
is to perform in-situ testing. One possible modelling approach is the technique of
experimental modal analysis. This modelling approach relies on the data from the frequency
response function (FRF) curves where vibration modal parameters are extracted from the
measured data, and hence the dynamical behaviour can be described adequately [116, 117].
Such an in-situ modal testing is possibly the best method to stay away from all uncertainties
and updating of the numerical modelling approach. However, applying it to a large industrial
rotating machine such as gas turbine, which has numerous joints and fluid bearings, is
complicated due to the limited time constraints.
An alternative modelling approach is the use of a merged theoretical-experimental model for
the rotor-bearings-foundation system using modal coordinates [118]. In this approach, the
rotor and bearings are modelled numerically, and the foundation is modelled through modal
testing. Cavalca et al. [117] have used this approach to model their laboratory scaled test rig.
They have analysed the effect of the foundation sub-structure on a rotor-bearing system.
Generally, this technique is useful when the rotor can be disassembled easily from the system
[119]. Therefore, the main drawback of such modelling approach is that it requires the rotor
to be disassembled from the supporting structure to perform the modal tests, which is not
practical for most of the existing power stations.
Due to numerous practical difficulties, a reliable FE model of the foundation of the rotating
machine is hard to construct [120]. It is often found that two machines with exactly same
configuration, at the same location, constructed to the same drawings, exhibit noticeably
different vibrational behaviour. A possible reason for this different vibrational manners is the
nonlinear behaviour of the keyways and the huge number of connections between
components such as press fits, bolted joints and welds which combine to change the stiffness
of the structure significantly [121].
Considering these difficulties, using measured vibration response at the bearing locations
together with an acceptable numerical model of the rotor and a reasonably accurate model of
the bearings seems to be the most promising approach to identify the foundation model [122].
This approach was proposed firstly by Lees and Friswell [123]. The proposed method uses a
reduced mathematical model of the machine (i.e. good model of the rotor and acceptable

CHAPTER 2 LITERATURE REVIEW
46
model of the bearings) as well as measured pedestal vibration from a single machine’s
transient operation to estimate the foundation model as well as the state of rotor mass
unbalance. For the sake of simplicity, no damping has been included in the calculation.
Although the estimation of the amplitude of the mass unbalance was of good accuracy, no
attempts for the estimation of the phase have been made as this relies strongly on the quality
of the bearing model.
Edwards et al. [124] have developed a model-based method that can identify both the
foundation model as well as amplitude and phase of rotor mass unbalance using measured
response of a single machine’s transient operation. The identification method has shown
robustness with different unbalance configurations under many conditions such as poor
selection of balancing planes, and with different rotor and foundation configurations. To
validate the method, they have applied it experimentally on a laboratory size test rig.
Lees et al. [125] have applied this method to a turbogenerator set with turbine blades loss. An
accurate numerical model of the rotor and fairly accurate model of the journal bearings have
been used. In order to check the accuracy of the obtained foundation model, they have
estimated the machine response using rotor-bearing model together with estimated unbalance
and foundation parameters. A good fit between measured and estimated responses has been
shown, which proves that the estimated foundation model is of a good accuracy. Smart et al.
[109] proposed that for large rotating machines such as gas turbine, the identification of
foundation model using measured vibration at the entire speed range of the machine’s run-
up/run-down in a single band might be inaccurate. Therefore, they suggested that the
frequency range should be split into smaller bands.
As suggested by Smart et al. [109, 126], Sinha et al. [25, 127] have presented a method that
estimates both rotor mass unbalance and foundation model of a rotor-bearing-foundation
system. The method was similar in concept to references [123-125]. They have estimated the
parameters numerically and experimentally using three approaches. In the first approach, they
have used the measured machine response at the whole speed range at once. This approach
has estimated the rotor unbalance accurately, but has shown poor results for the foundation
parameters (i.e. mass, stiffness and damping). The reason was that the number of critical
speeds was probably more than the number of the measured degrees of freedom (DOFs). In
the second approach, they have split the speed range into smaller segments, but have

CHAPTER 2 LITERATURE REVIEW
47
identified a different unbalance vector within each frequency band. This method has shown
poor estimations of the rotor unbalance. In the final approach, they have split the frequency
range into bands and have estimated a global unbalance vector, but different foundation
models in each frequency band. This method has provided an excellent estimation of both
state of unbalance and foundation model. Despite that this approach estimated rotor
unbalance accurately, it can be computationally involved when applied on large rotating
machines that have several bearings such as the turbogenerator set. Therefore, enhancing this
method by applying it with reduced number of sensors without affecting the estimation
process could be welcomed by power plants.
Jalan et al. [128] have presented a model-based technique for diagnosing multiple faults,
namely rotor mass unbalance and misalignment, in rotor-bearing systems. They have been
successfully able to identify both rotor malfunctions. The numerical results have been
validated by experimental measurements on a small laboratory rig. After running the test rig
with mass unbalance and misalignment, 1× (one multiplied by rotating frequency) and 2×
(two multiplied by rotating frequency) running speed components have been displayed. This
can be expected as it is well known that the rotor unbalance affects the 1× running speed, and
the misalignment mostly affects the 2× running speed [53].
Tiwari et al. [129, 130] have proposed a method for simultaneous identification of rotor mass
unbalance and bearing dynamic coefficients of a flexible rotor-bearing system by using run-
down vibration measurements. The identification procedure has been found to be very ill-
conditioned. After applying column scaling, they have found that the estimation of the
bearing coefficients still ill-conditioned. Thus, to solve this problem, they have implemented
the Tikhonov regularisation [131]. The results of the actual and estimated residual unbalances
and bearing coefficients were in good agreement. Also, their method has shown robustness
against noise. The proposed rotor fault identification technique has been validated
experimentally by Tiwari and Chakravarthy [132].
To enhance understanding of the theory behind the mathematical model-based unbalance
estimation approach consider a rotating machinery with rotor, journal bearings and machine
supporting structure, where the rotor is connected to the foundation through the bearings. The
equation of motion of such structure can be written as shown in Equation (2.5) below:

CHAPTER 2 LITERATURE REVIEW
48
[
𝐙𝑅,𝑖𝑖 𝐙𝑅,𝑖𝑏 0
𝐙𝑅,𝑏𝑖 𝐙𝑅,𝑏𝑏 + 𝐙𝐵 −𝐙𝐵0 −𝐙𝐵 𝐙𝐵 + �̅�𝐹
] {
𝐝𝑅,𝑖𝐝𝑅,𝑏𝐝𝐹,𝑏
} = {𝐟𝑢00} (2.5)
where 𝐙, 𝐝 and 𝐟𝑢 are the dynamic stiffness matrix (also called impedance matrix),
displacement vector and unbalance forces respectively. The subscripts 𝐹, 𝑅, 𝐵, 𝑖 and 𝑏
denote the foundation, the rotor, the bearings, the internal degrees of freedom and the bearing
(connection) degrees of freedom, respectively.
The first two rows of Equation (2.5) are used to eliminate the non-measured degrees of
freedom of the rotor (i.e. 𝐝𝑅,𝑖 and 𝐝𝑅,𝑏) as shown in the equation below:
�̅�𝐹𝐝𝐹,𝑏 = 𝐙𝐵(𝑃−1𝐙𝐵 − 𝐼)𝐝𝐹,𝑏 − 𝐙𝐵𝑃
−1𝐙𝑅,𝑏𝑖𝐙𝑅,𝑖𝑖−1 𝐟𝑢 (2.6)
where 𝑃 = 𝐙𝑅,𝑏𝑏 + 𝐙𝐵 − 𝐙𝑅,𝑏𝑖𝐙𝑅,𝑖𝑖−1 𝐙𝑅,𝑖𝑏. It is assumed that reasonably accurate analytical
models of the rotor 𝐙𝑅 and bearings 𝐙𝐵 are available, and the vibration response at bearing
pedestals 𝐝𝐹,𝑏 is measured. Thus, the unbalance forces 𝐟𝑢 and the reduced foundation model
�̅�𝐹 are the only unknowns in Equation (2.6).
Assume that the unbalance planes are positioned at nodes 𝑛1 to 𝑛𝑝. The amplitude of
unbalance and phase angles associated to the unbalance planes can be written as
[𝑢𝑛1 , 𝑢𝑛2 , 𝑢𝑛3 , … , 𝑢𝑛𝑝]T
and [α𝑛1 , α𝑛2 , α𝑛3 , … , α𝑛𝑝]T
. Therefore, the complex quantity of the
rotor unbalance for the 𝑖th balancing plane may be evaluated as:
𝑢𝑛𝑖 exp(jα𝑛𝑖) = 𝑎𝑛𝑖 + j𝑏𝑛𝑖 (2.7)
Hence, the unbalance forces in the vertical and horizontal directions can be written as shown
in Equation (2.8).

CHAPTER 2 LITERATURE REVIEW
49
𝐟𝑢 = ω2
{
0⋮0
𝑎𝑛1 + 𝑗𝑏𝑛1−𝑗𝑎𝑛1 + 𝑏𝑛1
0⋮0
𝑎𝑛𝑝 + 𝑗𝑏𝑛𝑝−𝑗𝑎𝑛𝑝 + 𝑏𝑛𝑝
0⋮0 }
(2.8)
The expression for the unbalance forces may be further simplified as shown in Equation (2.9)
𝐟𝑢 = ω2𝐓𝐠 (2.9)
where 𝐠 = [𝑎𝑛1 𝑏𝑛1 𝑎𝑛2 𝑏𝑛2 ⋯ 𝑎𝑛𝑝 𝑏𝑛𝑝]T
and 𝐓 is the transformation matrix which is
defined such that Equations (2.8) and (2.9) are equivalent. Substituting Equation (2.9) into
Equation (2.6) gives
�̅�𝐹𝐝𝐹,𝑏 = 𝐙𝐵(𝑃−1𝐙𝐵 − 𝐼)𝐝𝐹,𝑏 −ω
2(𝐙𝐵𝑃−1𝐙𝑅,𝑏𝑖𝐙𝑅,𝑖𝑖
−1 𝐓)𝐠 (2.10)
In order to identify the rotor unbalance in a least-square sense, the foundation parameters are
grouped into a vector 𝐯. Assume that the impedance matrix of the reduced model of the
foundation is written in terms of mass, damping and stiffness matrices. If there are 𝑡
measured degrees of freedom at the foundation-bearing interface, then the vector 𝐯 can be
written as
𝐯 = [�̅�𝐹,11 �̅�𝐹,12 … �̅�𝐹,𝑡𝑡 𝑐�̅�,11 𝑐�̅�,12 … 𝑐�̅�,𝑡𝑡 �̅�𝐹,11 �̅�𝐹,12 … �̅�𝐹,𝑡𝑡]T (2.11)
With this expression of 𝐯, there is a linear transformation such that
[�̅�𝐹]{𝐝𝐹,𝑏} = [𝐖]{𝐯} (2.12)
where 𝐖 contains the measured response terms at each frequency. For the N𝑡ℎ measured
frequency:

CHAPTER 2 LITERATURE REVIEW
50
𝐖(ω𝑁) = [W0(ω𝑁) W1(ω𝑁) W2(ω𝑁)]T (2.13)
If all elements of the foundation mass, damping and stiffness matrices are identified, then
W𝑘(ω𝑁) = (𝑗ω𝑁)𝑘
[ 𝐝𝐹,𝑏T (ω𝑁) 0 … 0
0 𝐝𝐹,𝑏T (ω𝑁) 0
⋮ ⋮ ⋱ ⋮0 0 … 𝐝𝐹,𝑏
T (ω𝑁)]
(2.14)
where 𝑘 = 0, 1, 2. Hence, Equation (2.10) becomes
𝐙𝐵(𝑃−1𝐙𝐵 − 𝐼)𝐝𝐹,𝑏 = ω𝑁
2 (𝐙𝐵𝑃−1𝐙𝑅,𝑏𝑖𝐙𝑅,𝑖𝑖
−1 𝐓)𝐠 + [𝐖]{𝐯} (2.15)
Let
R(ω𝑁) = ω𝑁2 𝐙𝐵𝑃
−1(ω𝑁)𝐙𝑅,𝑏𝑖(ω𝑁)𝐙𝑅,𝑖𝑖−1 (ω𝑁)𝐓 (2.16)
and
H(ω𝑁) = 𝐙𝐵(ω𝑁) (𝑃−1(ω𝑁)𝐙𝐵(ω𝑁) − 𝐼)𝐝𝐹,𝑏(ω𝑁) (2.17)
Substitution of Equations (2.16) and (2.17) into Equation (2.15) gives
[𝐖(ω𝑁)]{𝐯} + [R(ω𝑁)]{𝐠} = H(ω𝑁) (2.18)
Equation (2.18) can be rearranged as shown in Equation (2.19)
[𝐖(ω𝑁) R(ω𝑁)] {𝐯𝐠} = [H(ω𝑁)] (2.19)
The system of equations in Equation (2.19) is overdetermined. Therefore, a solution can be
obtained by applying the least squares technique as shown in Equation (2.20)
{𝐯𝐠} = [[[𝐖 R]
T[𝐖 R]]−1[𝐖 R]T] [H] (2.20)

CHAPTER 2 LITERATURE REVIEW
51
Summary and conclusion 2.6
This Chapter started by reviewing the modal balancing technique. Then, review on papers
pertaining to the IC balancing approach was given. After that, the unified balancing method
that combines both modal balancing and IC balancing approaches was reviewed. Finally, a
review of literature regarding the model-based rotor mass unbalance identification approach
was presented.
The IC balancing approach is a powerful and almost mature method for balancing of
industrial rotating machines. However, this balancing approach is currently applied using
vibration measurements acquired at a single machine speed which is mostly the machine
operating speed. The use of acquired vibration measurements at a single machine speed might
introduce error in the estimated rotor unbalance, hence results in poor rotor balancing.
Therefore, the influence of applying the IC balancing method using vibration measurements
at multiple speeds in a single band will be investigated in this research study and compared
with the estimation using measurements at single speeds.
It has been found that almost no researchers (according to the best knowledge of the author)
have identified the rotor mass unbalance using a single sensor per bearing location together
with vibration measurements from a single machine run-up/down. Therefore, this research
project attempts to enhance the current IC and model-based balancing approaches by using a
single vibration sensor per bearing pedestal.
It is comprehensible that since rotating machines represent the largest and most important
class of machinery used for many industrial applications, a large amount of papers, books,
patents, reports and various texts has been published during the last few decades. Therefore,
it isnotaneasymatter andsurelyoutof theauthor’sability to recognise and describe the
significance of each work and include each contribution in the entire field. On the other hand,
a general description of the direction in which various researchers made their contributions
has been achieved in this brief literature review.

CHAPTER 3 EXPERIMENTAL SETUP AND INSTRUMENTATION
52
CHAPTER 3
EXPERIMENTAL SETUP AND
INSTRUMENTATION

CHAPTER 3 EXPERIMENTAL SETUP AND INSTRUMENTATION
53
Introduction 3.1
This chapter presents the laboratory rigs and instrumentations used for the experiments
in details. It starts by showing the steps of constructing and assembling the test rigs, and
then explains the different mechanical and electrical elements of the experimental
apparatus (Section 3.2). After that, the different parts of the data acquisition (DAQ)
system are described in details in Section 3.3. The last part of this chapter shows the
modal testing of the system (Section 3.4).
Experimental rig 3.2
The rotor mass unbalance estimation methods proposed in the current study are needed
to be validated experimentally in order to show their practicality in real machines.
Therefore, two configurations of a simple rotating machine were first designed using
professional commercial engineering drawing software SolidWorks [133] (Figure 3.1).
The first configuration is with one balancing disc and the second configuration is with
two balancing discs. Each part of the test rig was manufactured individually according
to the drawings. Then, all parts were assembled to form the complete test apparatus.
Figure 3.2 presents the different elements of the assembled test rig. The steps of
assembling the various parts to create the complete small scale laboratory rig are shown
in Figure 3.3. Figure 3.4 displays photographs of the constructed experimental rigs. The
rigs were designed to simulate the real rotating machines in order to detect rotor mass
unbalance using vibration measurements acquired during the transient period (i.e.
machine run-up and run-down). The test rig is located in the Dynamics Laboratory at
Pariser Building at the University of Manchester.

CHAPTER 3 EXPERIMENTAL SETUP AND INSTRUMENTATION
54
Figure 3.1 3D drawings of the experimental rig, (a) first configuration, (b) second configuration
(a)
(b)

CHAPTER 3 EXPERIMENTAL SETUP AND INSTRUMENTATION
55
Figure 3.2 Presentation of the different elements of the assembled test rig (first configuration)
3.2.1 Main elements of the experimental rig
The essential mechanical and electrical parts of the test apparatus including the shaft,
disc, motor, etc. are described in the following seven sub-sections.
3.2.1.1 Rotating shaft
The rotating mild steel solid shaft was manufactured by SKF Company. The length of
the shaft is 1000mm with a circular cross section of 20mm diameter. The hardness of
the steel shaft is 60 HRC anditsmassis2.46kg.ThedensityandYoung’smodulusof
the shaft are calculated in Sub-section 3.4.2.
Ball bearing Balancing disc Flexible coupling
Motor support
Rig support Bearing support

CHAPTER 3 EXPERIMENTAL SETUP AND INSTRUMENTATION
56
Figure 3.3 Steps of constructing the experimental rig (first configuration)
(1) (2)
(6)
(3) (4)
(5)

CHAPTER 3 EXPERIMENTAL SETUP AND INSTRUMENTATION
57
Figure 3.4 Layout of the (a) first and (b) second configurations of the experimental rig
(b)
(a)

CHAPTER 3 EXPERIMENTAL SETUP AND INSTRUMENTATION
58
3.2.1.2 Balancing disc
In the first configuration, the shaft carries a single balancing disc positioned at midspan
between the two bearings. In the second configuration, the shaft carries two identical
balancing discs at distances of 240 and 665mm from the bearing closer to the motor.
The balancing discs were manufactured to simulate the rotating parts that are attached to
the rotating shaft in real rotating machines. Each disc is made of mild steel and has a
density of 7828 kg/m3. The diameter and thickness of both discs are 130 and 20mm
respectively. Two flanges with diameter of 40mm and thickness of 20mm each are
added to the disc to ensure that the disc will not slip when the shaft rotates at high
speed. Each disc contains staggered tapped holes (M5) in two different pitch diameters
which are 70 and 120mm. The angle between two adjacent holes for a particular pitch
diameter is 30 degree. The staggered tapped holes were made for the purpose of
inserting the mass unbalance in them, hence simulating the unbalance in real rotating
machines. Typical balancing disc is shown in Figure 3.5.
Figure 3.5 (a) Photograph and (b) dimensions of typical balancing disc
3.2.1.3 Ball bearings and supporting structure
The assembled rotor (i.e. shaft and balancing disc(s)) is supported by two identical
greased lubricated pedestal ball bearings as illustrated in Figure 3.3. The bearings,
which were manufactured by SKF (model: SY20TF), can accommodate speeds up to
8500 RPM. The bearing housings are made of grey cast iron and can be re-lubricated
𝟑𝟎°
40 mm 20 mm
Side view
Front view
130
mm
60 mm
20 mm (a) (b)

CHAPTER 3 EXPERIMENTAL SETUP AND INSTRUMENTATION
59
through a grease nipple in the housing. Figure 3.6 shows a photograph of conventional
pedestal ball bearing.
Figure 3.6 (a) Photograph of typical ball bearing (model: SY20TF) and (b) its dimensions in mm
In order to include more than one critical speed within the machine’s run-up speed
range, i.e. 0 to 50 Hz, two thin and flexible steel horizontal beams are used to support
the bearings. The dimensions of the horizontal beams for the first and second
configurations are 530mm × 25mm × 3mm and 530mm × 25mm × 8mm respectively.
The horizontal beams were sandwiched between two layers of double-sided adhesive
tape (model: 3M Acrylic Foam Tape, 25mm, white) in order to increase the damping
effect when the rotor pass through the critical speeds. The outer side of the tape is
attached to a very thin shim to make the damping effect stay for a long time
(Figure 3.7). Each horizontal beam is screwed to two rectangular steel blocks (107mm
× 25mm × 25mm) that are screwed to a thick horizontal base plate (580mm × 150mm
× 15mm).
33.3
20.5
65
32
127
97
20
(a) (b)

CHAPTER 3 EXPERIMENTAL SETUP AND INSTRUMENTATION
60
Figure 3.7 Steps of attaching the double-sided adhesive tape and shim to the horizontal beam
3.2.1.4 Electrical motor
The rotor-bearing system was mated to a three-phase DC motor (Figure 3.3). The
electrical motor was manufactured by Beatson Fans & Motors Ltd, and its model is
GF6382. A photograph of the motor is shown in Figure 3.8. The power of the motor is
0.75 kW and its maximum speed is approximately 3000 RPM. The motor was
connected to a control panel to run the motor’s shaft at different speeds.
Figure 3.8 Photographs of the electrical motor used in the experiments
(1)
(4)
(2)
(3)

CHAPTER 3 EXPERIMENTAL SETUP AND INSTRUMENTATION
61
To run-up/run-down the motor linearly at a given period of time with a specified range
of speeds, the control panel was controlled by software developed by Softstart
Company. The laptop was connected to the control panel through universal serial bus
(USB) portable device which is shown in Figure 3.9. The USB device was
manufactured by Delta Electronics, Inc. (model: IFD6500).
Figure 3.9 Delta USB-RS485 converter
For the purpose of aligning the motor’s shaft centre with the rotor’s shaft centre, two
blocks (150mm × 25mm × 55mm) were positioned under the motor as shown in
Figure 3.8. The motor was fixed to a rigid thick horizontal plate by four long screws
passing through the two blocks. The thick horizontal plate was mounted on a massive
steel platform by means of two screws.
3.2.1.5 Flexible coupling
The rotor-bearing system was mated to the electrical motor through a flexible coupling
made of 7075 Aluminium to transmit rotational power from themotor’s shaft to the
rotor’s shaft. The flexible coupling was made by Ruland Manufacturing Co., Inc.
(model: FCMR38-20-16-A) (Figure 3.10). The weight, length, outside diameter and
bore diameters of the coupling are 236g, 57.2mm, 38.1mm, 20mm, and 16mm
respectively. The temperature range of the coupling is between -40 and +107C, and its
speed capability ranges up to 6000 RPM. The biggest advantage of this type of
couplings is that they can accommodate misalignment and compensate for end
movement while transmitting power [134]. This coupling permits angular misalignment
of up to 3 degrees. In addition, it allows some parallel misalignment between the motor

CHAPTER 3 EXPERIMENTAL SETUP AND INSTRUMENTATION
62
and rotor shafts. The coupling hubs were first aligned on the shafts. Then, the M5
screws of both coupling hubs were tightened using 4mm hex key.
Figure 3.10 Flexible coupling (a) before and (b) after assembling
3.2.1.6 Foundation
The three base plates are mounted on a massive rectangular platform made of mild steel.
The length, width and thickness of the steel platform are 1743mm, 1136mm and 30mm
respectively. The steel platform lies atop a huge steel plate with similar length and
width but has a thickness of 50mm. For the purpose of mitigating noise and vibration, a
12mm thick anti-vibration (TICO) pad was sandwiched between the two steel plates.
The anti-vibration pad, which was manufactured by Tiflex Company, consists of
synthetic rubber and filled with cork particles. The massive steel plate is placed atop
hollow rectangular foundation table (1743mm × 1136mm × 690mm) which was built
of bricks. The steps of constructing the foundation are shown in Figure 3.11. A
photograph of the foundation table, steel plates and TICO pad is provided in
Figure 3.12.
(a) (b)

CHAPTER 3 EXPERIMENTAL SETUP AND INSTRUMENTATION
63
Figure 3.11 Steps of constructing the foundation
Figure 3.12 Photograph of the foundation
3.2.1.7 Machine guard and safety switch
The experimental rig was guarded by a rectangular metal steel casing for safety
precaution. The top, front and right sides of the guard are transparent windows. The
length, width and height of the guard are 1155mm, 600mm and 280mm respectively.
Figure 3.13 shows a photograph of the guard of the test rig. An electrical switch was
attached to one of the hinges on the back of the guard (Figure 3.14). It was
(1)
(4) (3)
(2)
Steel platform
Anti-vibration pad
Steel plate
30mm
12mm
50mm

CHAPTER 3 EXPERIMENTAL SETUP AND INSTRUMENTATION
64
manufactured by Steute (material number: 95554002); it works in a way such that when
the guard is rotated to the open position by more than 10 degrees, the normally closed
contacts in the safety switch are mechanically forced open turning the control power off,
hence disabling the machine. As the switch contacts can be closed only when the shaft
of the switch is rotated to the closed position, the rotating machine cannot be restarted
until the guard is closed.
Figure 3.13 Machine guard (a) close position, (b) open position
Figure 3.14 Hinge operated safety switch
(a) (b)

CHAPTER 3 EXPERIMENTAL SETUP AND INSTRUMENTATION
65
Data acquisition system 3.3
The term data acquisition, abbreviated by the acronyms DAQ, is often used to describe
the sampling of signals that measure real world physical phenomena including motion,
temperature, pressure, etc. and converting them into digital values that can be stored and
analysed on a personal computer (PC). A typical DAQ system consists of sensors,
signal conditioners, DAQ hardware, DAQ software, and PC. Figure 3.15 shows a
functional diagram of typical DAQ system. The main elements of the DAQ system are
explained in the following four sub-sections.
Figure 3.15 Functional diagram of typical DAQ system
3.3.1 Sensors
Although the terms transducer and sensor are used interchangeably, they have quite
different meanings. The term transducer is usually used to describe the device that
converts any type of energy into another. However, the sensor is a device that is
responsible for converting a physical phenomenon into electrical charge which can be
measured by the DAQ hardware [135]. Sensors are commonly used in industries for
making in-situ measurements. The type of sensor is chosen depending on the physical
phenomenon that is needed to be measured. For example, thermocouples are used to
convert the temperature which is a physical phenomenon into a voltage which is an
electrical signal [136].
Physical
Phenomenon Sensor Field wiring
Signal
conditioner
Field wiring DAQ device DAQ
Software

CHAPTER 3 EXPERIMENTAL SETUP AND INSTRUMENTATION
66
The type of the sensor used in the current research project is Integrated Circuit
Piezoelectric (ICP) acceleration sensor. It is manufactured by PCB Piezotronics Inc. and
its model is 352C33. The ICP acceleration sensor is an electromechanical sensor which
consists of a piezo-electric material that is sandwiched between a seismic mass and the
base of the sensor, as illustrated in Figure 3.16.
Figure 3.16 Schematic cross-sectional view of compression mode ICP acceleration sensor
The term piezoelectric is used to describe the material that produces positive/negative
electric charges when it is compressed or subjected to shear forces [137]. The most
popular piezoelectric materials are quartz (naturally piezoelectric) and polycrystalline
ceramics [135]. The latter is human-made crystals which are forced to be piezoelectric.
The piezoelectric material used in the above accelerometer model is polycrystalline
ceramics.
There are three primary configurations utilised in the ICP accelerometers design. These
are compression mode design, shear mode design and flexural mode design [138]. The
accelerometers used in the current research are compression mode accelerometers. In
this type of accelerometers, when the sensor is subjected to acceleration, the seismic
mass imposes a force on the piezoelectric crystal and hence compresses and stretches it.
As a result of the compression, the piezoelectric crystal produces a charge which is
proportionaltotheacceleration(accordingtoNewton’ssecondlawofmotion:𝐹𝑜𝑟𝑐𝑒 =
𝑚𝑎𝑠𝑠 × 𝑎𝑐𝑐𝑒𝑙𝑒𝑟𝑎𝑡𝑖𝑜𝑛). The charge output is then converted to a low impedance
voltage [139]. This conversion is made by built-in electronics (Figure 3.16). The 5.8g
Seismic mass
Pre-load bolt
Case
Piezo-electric crystal
Base
Mounting stud
Built-in electronics

CHAPTER 3 EXPERIMENTAL SETUP AND INSTRUMENTATION
67
accelerometer has a sensitivity of 100 mV/g and works in a frequency range of 0.5 to
10,000 Hz.
3.3.2 Signal conditioner
The analogue signals produced by the sensors often need some conditioning before
reaching the analogue to digital converter (ADC) in the DAQ hardware. Signal
conditioning devices are capable of removing the unwanted components of the analogue
signal and prepare it for the DAQ device. Signal conditioning usually includes
attenuation, amplification, filtration, linearization, isolation, multiplexing, etc. [140].
Furthermore, some types of signal conditioners can provide an adjustable current source
to drive some models of sensors [141].
As a matter of fact, almost all signals from sensors have a certain amount of noise.
Therefore, it is not easy for the very small signals to survive without conditioning.
Some types of sensors often generate very tiny signals, which cannot survive without
conditioning. Therefore, signal conditioners often contain low pass filter (commonly
known as an antialiasing filter) which is capable of blocking frequencies higher than the
desired frequency range and hence increasing the measurement accuracy [142]. The
type of the signal conditioner used in the current research study is PCB 482C05
(Figure 3.17).
Figure 3.17 (a) Front and (b) back sides of the signal conditioner used in the modal test
3.3.3 DAQ device
The next step after conditioning the analogue signal is to translate it into a digital form.
This is done through the ADC. The ADC is the heart of the DAQ hardware as it makes
(a) (b)

CHAPTER 3 EXPERIMENTAL SETUP AND INSTRUMENTATION
68
the signal readable and can be analysed by the computer [142]. The DAQ card is
required to be connected to PC in case of using PC based data acquisition systems, and
the driver software performs the data acquisition. The DAQ works on the principle of
converting the input voltage into a number of the nearest binary bins, depending on the
sensitivity of the DAQ hardware [17]. The DAQ device used in the current research
project was manufactured by National Instruments company (model: NI USB-6229
BNC). Figure 3.18 shows a photograph of the DAQ hardware employed in the modal
test.
Figure 3.18 16-bit 16-channel DAQ hardware
3.3.4 DAQ software
DAQ software is the final component of the DAQ system [142]. It is required for the
DAQ device to be able to communicate with the PC. Without proper driver software,
the whole DAQ system will not function properly. The driver software can be defined
as a set of instructions that are written by a programmer to perform a particular task
when executed by the computer [143]. The driver software can be written in any
programming language that computer can understand. Examples of the popular
programming languages used to construct the drive software are C, C++, Java and
Fortran [136]. The driver software utilised in the current research project was developed
by Austin consultants (Figure 3.19).

CHAPTER 3 EXPERIMENTAL SETUP AND INSTRUMENTATION
69
Figure 3.19 DAQ driver software
Modal tests 3.4
The modal test is carried out to know the modal properties of the entire system
including natural frequencies, mode shapes, etc. It is necessary to conduct a modal test
before running the machine due to many reasons such as avoiding running the machine
at or close to the critical speeds. Also, these parameters are required for the FE
modelling in order to predict the structural response to dynamic loading. There are four
main stages in the modal testing of any structure, namely structure exciting stage,
sensing stage, signal conditioning stage, and processing stage.
3.4.1 Modal test of assembled rig
The set up for the modal test is shown in Figure 3.20. Figure 3.21 shows a schematic of
the setup and instrumentations used for the modal test.
ur

CHAPTER 3 EXPERIMENTAL SETUP AND INSTRUMENTATION
70
Figure 3.20 Setup of the modal test of the (a) first and (b) second test rig configurations
Sensors Impact locations (b)
(a) Sensors Impact locations

CHAPTER 3 EXPERIMENTAL SETUP AND INSTRUMENTATION
71
Figure 3.21 Schematic of the setup and instrumentations used for the modal test (first
configuration)
An instrumented hammer with a sensitivity of 1.1 mV/g (model: PCB 086C04) has been
used to excite the rig. This has been done by impacting different locations on the shaft.
The instrumented hammer has been connected to the four-channel signal conditioner via
BNC (Bayonet Neill–Concelman) to BNC cable. Seven ICP accelerometers have been
used to measure the dynamic response of the excited structure and transmit the analogue
signal to the signal conditioners via micro-to-BNC cables. Then, the conditioned
analogue signal has been transmitted to the 16-bit 16-channel DAQ hardware using
BNC-to-BNC cables. After that, the digitised signal has been transmitted to data
logging software on a Laptop computer via USB cable for further processing and
analysis.
The accelerometers have been mounted using super glue in mutually perpendicular
directions. Super glue is an excellent choice for vibration testing as this type of adhesive
dries quickly. Furthermore, as the glue has a very good stiffness compared to other
adhesives, it provides an excellent frequency response. To get a good indication of the
𝒙
𝒚
𝒛 a b
Accelerometer , Impact hammer , Micro to BNC signal cable
BNC to BNC signal cable (Sensor) BNC to BNC signal cable (Hammer) , Note: All dimensions are in cm
Front view Side view
𝒙 𝒛
𝒚
19
9 58 42 42 7
100
Motor

CHAPTER 3 EXPERIMENTAL SETUP AND INSTRUMENTATION
72
mode shapes, locations of the accelerometers have been chosen carefully as displayed in
Figure 3.21. For each impact location, the hammer has impacted the shaft ten times,
where the response decayed to zero before each new impact. This is done to reduce the
noise level in the signal.
Although the impact hammer test is designed to reproduce the ideal impact of structure,
which has infinitely small impact duration, it is almost impossible to perform it in real
as there is always a known contact time. Therefore, every effort has been made to
ensure that the contact time is very small and no double hits have been done. It should
be mentioned that acquiring the vibration response has been started few seconds before
the first impact and stopped few seconds after the last impact. The impact test has been
done in both vertical and horizontal radial directions.
Code written in commercial software package MATLAB [144] has been used to
generate FRF of the acquired vibration measurements of each location. The sampling
rate was 5000 Hz, and the frequency resolution was 0.61 Hz. The first four natural
frequencies of the first configuration by appearance are listed in Table 3.1. Figure 3.22
shows typical FRF plot from the modal test on the first test rig configuration. It has been
observed that the 17.09 and 29.91 Hz natural frequencies are dominant in the horizontal
direction while the 31.13 and 58.59 Hz are dominant in the vertical direction. The mode
shapes of the first four modes are shown in Figure 3.23.

CHAPTER 3 EXPERIMENTAL SETUP AND INSTRUMENTATION
73
Figure 3.22 Typical FRF plots in (a) vertical and (b) horizontal directions at location 4 (first
configuration)
(a)
(b)

CHAPTER 3 EXPERIMENTAL SETUP AND INSTRUMENTATION
74
Figure 3.23 Mode shapes of the (a)1st, (b) 2
nd, (c) 3
rd and (d) 4
th modes of the system (1
st
configuration)
In the second configuration, the test was done by impacting three different locations
along the shaft at both vertical and horizontal locations. The first four natural
frequencies of the second configuration by appearance are listed in Table 3.1.
Figure 3.24 shows typical FRF plot from the modal test on the second test rig
configuration. The mode shapes of the first four modes are shown in Figure 3.25.
Table 3.1 Natural frequencies of the test rig
Mode 1
st configuration 2
nd configuration
Frequency (Hz) Frequency (Hz)
1 17.09 24.41
2 29.91 31.13
3 31.13 53.1
4 58.59 84.23
(d) (c)
(b) (a)

CHAPTER 3 EXPERIMENTAL SETUP AND INSTRUMENTATION
75
Figure 3.24 Typical FRF plots in (a) vertical and (b) horizontal directions at location 4 (second
configuration)
(a)
(b)

CHAPTER 3 EXPERIMENTAL SETUP AND INSTRUMENTATION
76
Figure 3.25 Mode shapes of the (a)1st, (b) 2
nd, (c) 3
rd and (d) 4
th modes of the system (2
nd
configuration)
3.4.2 Modal testing of free-free shaft
The modal test of the free-free shaft is carried out in order to obtain the exact value of
the Young’s modulus, which is needed in the FE modelling. First, the mass of the shaft
was measured on a digital scale and found to be 2.46 kg. The dimensions of the shaft
are shown in Figure 3.26.
Figure 3.26 Shaft dimensions
(d) (c)
(b) (a)
Front view
1000 mm
20 mm
Side view

CHAPTER 3 EXPERIMENTAL SETUP AND INSTRUMENTATION
77
Therefore, the volume of the shaft can be calculated as follows,
𝑉𝑠ℎ𝑎𝑓𝑡 = (𝜋(0.02)2
4) 1.000 = 3.142𝑒−4 𝑚3 (3.1)
Hence, the density is determined as shown in the following formula
𝜌 =𝑚𝑠ℎ𝑎𝑓𝑡
𝑉𝑠ℎ𝑎𝑓𝑡=
2.46
3.142𝑒−4= 7829 𝑘𝑔/𝑚3 (3.2)
The main formula for calculating the natural frequency [145] is
𝑓𝑛 =𝐴𝑛
2𝜋𝑙2√𝐸𝐼
𝜌𝑠 (3.3)
where 𝐴𝑛 is the shape of beam factor, 𝑙 is the shaft length, √𝐸
𝜌 is material dependent
factor with
𝐸:Young’smodulus
𝜌: Material density
and √𝐼
𝑠 is section geometry factor with
𝐼: Second moment of area
𝑠: Area of the cross section
The second moment of area of the shaft can be calculated as
𝐼 =𝜋𝑑4
64=𝜋(0.02)4
64= 7.85𝑒−9𝑚4 (3.4)
The shape of beam factor can be calculated as shown below
𝐴𝑛 = [(2𝑛 + 1)𝜋
2]2
(3.5)
Hence, the first shape of beam factor for free-free shaft is 𝐴1 = 22.2. Now, the only two
unknowns in Equation (3.3) arethenaturalfrequencyandYoung’smodulus.Inorderto

CHAPTER 3 EXPERIMENTAL SETUP AND INSTRUMENTATION
78
obtaintheYoung’smodulus,thenaturalfrequencyshouldbefoundexperimentally,and
then substituted it in Equation (3.3). The shaft was hanged to a beam via two bungee
cords with steel hooks (one at each end) as shown in Figure 3.27. The first natural
frequency by appearance has been observed at 84.84 Hz. Typical FRF plot is shown in
Figure 3.28.
Figure 3.27 Setup of the modal test of a free-free steel shaft

CHAPTER 3 EXPERIMENTAL SETUP AND INSTRUMENTATION
79
Figure 3.28 Typical FRF plot of free-free shaft obtained during modal testing
Thus, Young’s modulus can be calculated by rearranging Equation (3.3) as shown in the
following equation
𝐸 =4𝜋2𝑓𝑛
2(𝜌𝑠𝑙4)
𝐴𝑛2 𝐼
=4𝜋2(84.84)2(7829∗0.000314∗1.0004)
22.22∗7.85𝑒−9= 180.5𝑒9𝑃𝑎 (3.6)
Therefore, the value of Young’s modulus that will be used in the FE model is
180.5𝑒9 𝑃𝑎.
3.4.3 Discussion on the influence of supporting structure
It can be seen in Figure 3.28 that the natural frequency of the rotor with added balancing
disc is 84.84 Hz. However, it can be seen in Figure 3.22 that the natural frequency of
the assembled rig with one balancing disc is 17.09 Hz. This change in the natural
frequency is considered as the result of combined effect of the entire rotor-bearing-
foundation assembly.

CHAPTER 3 EXPERIMENTAL SETUP AND INSTRUMENTATION
80
Summary 3.5
This chapter presented two configurations of the laboratory rig used for the
experiments. The first configuration consists of a solid shaft which is supported on
relatively flexible foundation through two greased lubricated pedestal ball bearings and
carries a steel balancing disc at midspan between the two bearings. A flexible coupling
made of Aluminium connects the shaft to an electrical motor. Each of the two ball
bearings is mounted on flexible steel horizontal beam. Each horizontal beam is screwed
to two rectangular steel blocks that are screwed atop thick base plate as shown in
Figure 3.3. Both base plates of the two bearing pedestals are mounted on a massive steel
platform. The second configuration is similar to the first configuration, but with an extra
balancing disc and thicker horizontal beams. Both configurations are shown in
Figure 3.4.
The DAQ system was also discussed in this chapter. The main elements of the DAQ
system were explained. The data acquisition begins by converting a physical
phenomenon into electrical charges which are measurable by the sensor. Then, the
signal is conditioned by the signal conditioning unit and prepared for the DAQ
hardware. The primary function of the DAQ hardware is to convert the analogue signal
into digital signal. Finally, with the help of driver software, the digital signal is
displayed and stored in PC for further processing. In the last part of the current chapter,
modal tests were carried out on both configurations, and the natural frequencies as well
as mode shapes were obtained.

CHAPTER 4 MATHEMATICAL MODELLING AND SIGNAL PROCESSING
81
CHAPTER 4
MATHEMATICAL MODELLING AND
SIGNAL PROCESSING

CHAPTER 4 MATHEMATICAL MODELLING AND SIGNAL PROCESSING
82
Introduction 4.1
There are several approaches for modelling rotating machines such as the experimental
modal tests modelling technique. This modelling approach has the advantage of
avoiding all uncertainties in the mathematical modelling technique. However, the
application of this modelling approach on rotating machines with fluid bearings is
complicated, because the dynamics of the fluid bearings during the rotor rotation
influence the dynamic behaviour of the whole machine. Some researchers [115, 166,
174] presented an overview on various experimental modal tests modelling approach
and discussed the limitations of this method.
Another alternative is the application the finite element (FE) modelling approach [175].
Some researchers such as Edwards et al. [28] and Lees et al. [102] provided literature
reviews pretaing to the FE modelling of rotating machines. This modelling approach has
been found to be the most suitable tool for the numerical modelling in structural
engineering nowadays [27]. Although the FE modelling approach is powerful, its
derivation is logical and simple. The texts written by Zienkiewicz et al. [176] and Cook
et al. [177] give details of the formulation of element matrices for different structural
element types such as shells, beams, continua and plates. The steps of the numerical
modelling of rotating machines using the finite element technique was presented by
some authors such as Friswell et al. [21] as well as Sinha [17]. Some researchers
proposed rotor faults identification approaches that rely mainly on an accurate
numerical model of the rotating machine [98-100].
The current research project includes a rotor mass unbalance estimation approach that
requires an accurate mathematical model of the rotating machine. Therefore, this
chapter explains the detailed steps of modelling a simple rotating machine using the FE
method. The second part of this chapter gives a brief idea about signal processing, and
briefly presents the concepts of the 3D waterfall plot, order tracking and Bode plot.
Mathematical modelling of a simple rotating machine using the FE method 4.2
This sub-section includes modelling the subsystems of simple rotating machinery, i.e.
rotor and foundation. Eventually, the subsystems are assembled to form the complete

CHAPTER 4 MATHEMATICAL MODELLING AND SIGNAL PROCESSING
83
system. The modelled rotor is assumed to be symmetric (i.e. stiffness and mass
properties do not change along the rotor).
4.2.1 Shaft element
One-dimensional numerical models of structural beams are typically created using beam
theories. Due to the fact that the beam is a three-dimensional structural member, all
models unavoidably approximate the underlying physics. Consider a beam element with
a certain length and has two nodes, one at each end. Each one of these nodes has two
DOFs (i.e. lateral displacement and slope) as shown in Figure 4.1. The beam
deformation should have continuous deflection and slope at any two adjacent elements.
In order to fulfil this continuity condition, each node will have two nodal variables (i.e.
deflection 𝑢𝑖 and slope Ψ𝑖). Hence, any two adjacent beam elements have the same slope
and deflection at the shared node.
Figure 4.1 The local coordinates of a beam element
The Euler-Bernoulli beam theory, which dates back to the 18th
century [146], states that
the plane that is perpendicular to the neutral axis before deformation stays plane and
perpendicular to the neutral axis after bending deformation [147]. This is illustrated in
Figure 4.2.
element 1 element 4 element 3 element 2 element 5
𝑦
𝑧
𝑥 Ψ1
𝑢1 𝑢2 Ψ2
𝜉
𝑙
element 3

CHAPTER 4 MATHEMATICAL MODELLING AND SIGNAL PROCESSING
84
Figure 4.2 Condition of Euler-Bernoulli beam theory
This assumption indicates that the slope is the 1st derivative of the deflection (i. e.Ψ𝑖 =
(𝝏𝒖
𝝏𝝃)𝑖). The deflection within the element can be approximated as shown in Equation
(4.1), below:
𝑢(𝜉) = [𝑁1(𝜉) 𝑁2(𝜉) 𝑁3(𝜉) 𝑁4(𝜉)] {
𝑢1Ψ1𝑢2Ψ2
} (4.1)
where 𝑁1, 𝑁2, 𝑁3 and 𝑁4 are the shape functions (also called Hermitian functions
[148]). As the beam element has four nodal variables, a cubic expansion for the
deflection can be identified as
𝑢(𝜉) = 𝑎𝑖 𝜉3 + 𝑏𝑖 𝜉
2 + 𝑐𝑖 𝜉 + 𝑑𝑖 (4.2)
According to the assumption of the Euler-Bernoulli beam theory, slope is computed
from Equation (4.2) as follows
𝜕𝑢
𝜕𝜉= 3𝑎𝑖 𝜉
2 + 2𝑏𝑖 𝜉 + 𝑐𝑖 (4.3)
The shape function 𝑁1 is equal to the displacement of the beam when 𝑢1 = 1 and Ψ1 =
𝑢2 = Ψ2 = 0. Hence, Equation (4.2) can be rewritten as
𝑢(𝜉) = 𝑁1(𝜉) = 𝑎1 𝜉3 + 𝑏1 𝜉
2 + 𝑐1 𝜉 + 𝑑1 (4.4)
𝑧
𝑥
Neutral axis
Ψ = 𝝏𝒙
𝝏𝒛

CHAPTER 4 MATHEMATICAL MODELLING AND SIGNAL PROCESSING
85
The four boundary conditions are
𝑁1(𝜉)|𝜉=0 = 1
𝜕𝑁1(𝜉)
𝜕𝜉|𝜉=0
= 0
𝑁1(𝜉)|𝜉=𝑙 = 0
𝜕𝑁1(𝜉)
𝜕𝜉|𝜉=𝑙
= 0
The four coefficients 𝑎1, 𝑏1, 𝑐1 and 𝑑1 can be determined from the four boundaries as
follows
𝑁1(𝜉)|𝜉=0 = 1 𝑦𝑖𝑒𝑙𝑑𝑠→ 𝑑1 = 1
𝜕𝑁1(𝜉)
𝜕𝜉|𝜉=0
= 0 𝑦𝑖𝑒𝑙𝑑𝑠→ 𝑐1 = 0
𝜕𝑁1(𝜉)
𝜕𝜉|𝜉=𝑙
= 0 𝑦𝑖𝑒𝑙𝑑𝑠→ 3𝑎1𝑙 + 2𝑏1 = 0
𝑦𝑖𝑒𝑙𝑑𝑠→ 𝑎1 =
−2𝑏13𝑙
𝑁1(𝜉)|𝜉=𝑙 = 0 𝑦𝑖𝑒𝑙𝑑𝑠→
−2𝑏1 𝑙2
3+ 𝑏1 𝑙
2 = −1 𝑦𝑖𝑒𝑙𝑑𝑠→ 𝑏1 =
−3
𝑙2 , hence 𝑎1 =
2
𝑙3
Substitution of the four coefficients in Equation (4.4) gives
𝑁1(𝜉) = 2
𝑙3 𝜉3 +
−3
𝑙2 𝜉2 + 1 (4.5)
The shape function 𝑁2 is equal to the displacement of the beam when Ψ1 = 1 and u1 =
𝑢2 = Ψ2 = 0. The same procedure is followed to calculate 𝑁2. A similar conclusion can
be drawn for the functions N3(𝜉) and N4(𝜉) (i.e. for each N𝑖(𝜉) : 4 equations with 4
unknowns 𝑎𝑖, 𝑏𝑖 , 𝑐𝑖 and 𝑑𝑖). Thus, N2, N3 and N4 can be written as

CHAPTER 4 MATHEMATICAL MODELLING AND SIGNAL PROCESSING
86
𝑁2(𝜉) = 𝜉3
𝑙2−2
𝑙 𝜉2 + 𝜉 (4.6)
𝑁3(𝜉) = 3
𝑙2 𝜉2 −
2
𝑙3 𝜉3 (4.7)
𝑁4(𝜉) = 𝜉3
𝑙2−𝜉2
𝑙 (4.8)
The material is assumed to be linearly elastic, obeying Hook’s law with Young’s
modulus 𝐸, which is assumed to be constant within the element. The elastic strain
energy stored in a beam element which has a flexural rigidity 𝐸𝐼 is given by
𝑈 =1
2 ∫ 𝐸 𝐼(𝜉) (
𝜕2𝑢
𝜕𝜉2)2
𝑑𝜉𝑙
0 (4.9)
Assume that the cross section does not vary within the element. Then, Equation (4.9)
becomes
𝑈 =1
2𝐸 𝐼 ∫ (
𝜕2𝑢
𝜕𝜉2)2
𝑑𝜉𝑙
0 (4.10)
The approximation to the strain energy along with the approximation to the lateral
displacement of the centre line of the beam, which is given by Equation (4.1), can be
used to obtain the following equation
𝑈 =1
2 {
𝑢1Ψ1𝑢2Ψ2
}
T
[
𝑘11 𝑘12 𝑘13 𝑘14𝑘21𝑘31𝑘41
𝑘22𝑘32𝑘42
𝑘23𝑘33𝑘43
𝑘24𝑘34𝑘44
] {
𝑢1Ψ1𝑢2Ψ2
} (4.11)
where the elements of the stiffness matrix are
𝑘𝑖𝑗 = 𝐸 𝐼 ∫ 𝑁𝑖′′(𝜉) 𝑁𝑗
′′(𝜉)𝑙
0 𝑑𝜉 (4.12)
The second derivatives of the Hermitian functions are

CHAPTER 4 MATHEMATICAL MODELLING AND SIGNAL PROCESSING
87
𝑁1′′(𝜉) = −
6
𝑙2(1 −
2𝜉
𝑙) , 𝑁2
′′(𝜉) = 2
𝑙(−2 +
3𝜉
𝑙)
𝑁3′′(𝜉) =
6
𝑙2(1 −
2𝜉
𝑙) , 𝑁4
′′(𝜉) = 2
𝑙(−1 +
3𝜉
𝑙)
(4.13)
As an example, 𝑘12 can be expressed as shown in Equation (4.14)
𝑘12 = 𝐸 𝐼 ∫ 𝑁1′′(𝜉) 𝑁2
′′(𝜉)𝑙
0 𝑑𝜉
= 𝐸 𝐼 ∫ −6
𝑙2(1 −
2𝜉
𝑙) 2
𝑙(−2 +
3𝜉
𝑙) 𝑑𝜉
𝑙
0
=12𝐸 𝐼
𝑙3∫ (2 − 7
𝜉
𝑙+ 6
𝜉2
𝑙2) 𝑑𝜉
𝑙
0
=12𝐸 𝐼
𝑙3 [2𝜉 −
7
2
𝜉2
𝑙+ 2
𝜉3
𝑙2]0
𝑙
= 12𝐸 𝐼
𝑙2 [2 −
7
2+ 2] =
6𝐸𝐼
𝑙2
(4.14)
The rest of the stiffness matrix terms are calculated same way as in Equation (4.14). The
integrand in Equation (4.12) is symmetric, thereby reducing the amount of computing,
because 𝑘𝑖𝑗 = 𝑘𝑗𝑖. Thus, the element stiffness matrix can be written as
𝐾 = [
𝑘11 𝑘12 𝑘13 𝑘14𝑘12𝑘13𝑘14
𝑘22𝑘23𝑘24
𝑘23𝑘33𝑘34
𝑘24𝑘34𝑘44
] = 𝐸 𝐼
𝑙3[
12 6𝑙 −12 6𝑙6𝑙−126𝑙
4𝑙2
−6𝑙2𝑙2
−6𝑙12−6𝑙
2𝑙2
−6𝑙4𝑙2
] (4.15)
The mass matrix can be calculated using the kinetic energy. Ignoring the rotational
effects, the kinetic energy of the beam may be written as
𝑇 = 1
2 ∫ 𝜌 𝐴(𝜉)�̇�2𝑑𝜉𝑙
0 (4.16)
where 𝜌 and A are the density of the material and the cross sectional area of the beam
element respectively. The approximation to the kinetic energy along with the
approximation to the displacement of the beam centreline can be used to obtain the
following equation

CHAPTER 4 MATHEMATICAL MODELLING AND SIGNAL PROCESSING
88
𝑇 =1
2
{
�̇�1Ψ̇1�̇�2Ψ̇2}
T
[
𝑚11 𝑚12 𝑚13 𝑚14𝑚21𝑚31𝑚41
𝑚22𝑚32𝑚42
𝑚23𝑚33𝑚43
𝑚24𝑚34𝑚44
]
{
�̇�1Ψ̇1�̇�2Ψ̇2}
(4.17)
Assuming uniform cross-sectional beam, the elements of the mass matrix can be written
as
𝑚𝑖𝑗 = 𝜌 𝐴 ∫ 𝑁𝑖(𝜉) 𝑁𝑗(𝜉)𝑙
0 𝑑𝜉 (4.18)
As an example, 𝑚32 can be expressed as shown in the following equation
𝑚32 = 𝜌 𝐴 ∫ 𝑁3(𝜉) 𝑁2(𝜉)𝑙
0 𝑑𝜉
= 𝜌 𝐴 ∫ (3
𝑙2 𝜉2 −
2
𝑙3 𝜉3) (
𝜉3
𝑙2−2
𝑙 𝜉2 + 𝜉)
𝑙
0 𝑑𝜉
= 𝜌 𝐴∫ (−2
𝑙5 𝜉6 +
7
𝑙4 𝜉5 −
8
𝑙3 𝜉4 +
3
𝑙2 𝜉3)
𝑙
0
𝑑𝜉
= 𝜌 𝐴 [−2
7𝑙5 𝜉7 +
7
6𝑙4 𝜉6 −
8
5𝑙3 𝜉5 +
3
4𝑙2 𝜉4]
0
𝑙
= 𝜌 𝐴 𝑙2 [−2
7+7
6 −8
5 +3
4] =
13
420 𝜌 𝐴 𝑙2
(4.19)
Calculating the other integrals gives the element mass matrix as shown below
𝑀 = [
𝑚11 𝑚12 𝑚13 𝑚14𝑚21𝑚31𝑚41
𝑚22𝑚32𝑚42
𝑚23𝑚33𝑚43
𝑚24𝑚34𝑚44
] = 𝜌 𝐴 𝑙
420 [
156 22𝑙 54 −13𝑙22𝑙54−13𝑙
4 𝑙2
13𝑙−3 𝑙2
13𝑙156−22𝑙
−3 𝑙2
−22𝑙4 𝑙2
] (4.20)
Figure 4.3 shows the coordinates defining bending in both vertical and horizontal
planes.

CHAPTER 4 MATHEMATICAL MODELLING AND SIGNAL PROCESSING
89
Figure 4.3 A rotor element with degrees of freedom (a) horizontal plane, (b) vertical plane, (c)
combination of horizontal and vertical
Assume the shaft is symmetric; the element stiffness and mass matrices of both planes
for Euler-Bernoulli beam can be obtained based on the local coordinate vector
[𝑢𝑘, 𝑣𝑘, 𝜃𝑘 , Ψ𝑘 , 𝑢𝑙 , 𝑣𝑙 , 𝜃𝑙 , Ψ𝑙]T as shown in Equation (4.21)
𝐾𝑒𝑙 =𝐸𝐼
𝑙3
[ 12 0 0 6𝑙 −12 0 0 6𝑙0 12 −6𝑙 0 0 −12 −6𝑙 00 −6𝑙 4𝑙2 0 0 6𝑙 2𝑙2 06𝑙 0 0 4𝑙2 −6𝑙 0 0 2𝑙2
−12 0 0 −6𝑙 12 0 0 −6𝑙0 −12 6𝑙 0 0 12 6𝑙 00 −6𝑙 2𝑙2 0 0 6𝑙 4𝑙2 06𝑙 0 0 2𝑙2 −6𝑙 0 0 4𝑙2 ]
and
𝑀𝑒𝑙 =𝜌𝐴𝑙
420
[ 156 0 0 22𝑙 54 0 0 −13𝑙0 156 −22𝑙 0 0 54 13𝑙 00 −22𝑙 4𝑙2 0 0 −13𝑙 −3𝑙2 022𝑙 0 0 4𝑙2 13𝑙 0 0 −3𝑙2
54 0 0 13𝑙 156 0 0 −22𝑙0 54 −13𝑙 0 0 156 22𝑙 00 13𝑙 −3𝑙2 0 0 22𝑙 4𝑙2 0
−13𝑙 0 0 −3𝑙2 −22𝑙 0 0 4𝑙2 ]
(4.21)
where the subscript 𝑒𝑙 denotes the element.
𝒛
𝒚
𝒛− 𝒙 plane
(a)
𝒛− 𝒚 plane
(b)
𝚿𝒌 𝛉𝒌
𝒖𝒌 𝒖𝒍
𝚿𝒍
𝒗𝒌 𝒗𝒍 𝛉𝒍
𝒛
𝒙
(c) O
𝒛
𝒚
𝒖𝒍
𝒙 𝒖𝒌
𝚿𝒌 𝒗𝒌
𝛉𝒌 𝒗𝒍
𝛉𝒍
𝚿𝒍

CHAPTER 4 MATHEMATICAL MODELLING AND SIGNAL PROCESSING
90
The gyroscopic matrix of the beam element may be developed as shown in the equation
below [21]
𝐺𝑒𝑙 =𝜌𝐼
15𝑙
[ 0 36 −3𝑙 0 0 −36 −3𝑙 0−36 0 0 −3𝑙 36 0 0 −3𝑙3𝑙 0 0 4𝑙2 −3𝑙 0 0 −𝑙2
0 3𝑙 −4𝑙2 0 0 −3𝑙 𝑙2 00 −36 3𝑙 0 0 36 3𝑙 036 0 0 3𝑙 −36 0 0 3𝑙3𝑙 0 0 −𝑙2 −3𝑙 0 0 4𝑙2
0 3𝑙 𝑙2 0 0 −3𝑙 −4𝑙2 0 ]
(4.22)
The shaft can be divided into a finite number of elements where each element has two
nodes. Each node has two translational and two rotational degrees of freedom. It is
assumed that the entire shaft elements are identical (i.e. the cross section, dimensions,
and material properties are same for each element). Thus, the equation of motion
(EOM) may be written as
[𝑀]𝑒𝑙�̈�𝑛𝑒 + ([𝐶]𝑒𝑙 + Ω[𝐺]𝑒𝑙)�̇�𝑛𝑒 + [𝐾]𝑒𝑙𝐝𝑛𝑒 = 𝐟𝑛𝑒 (4.23)
where 𝐝𝑛𝑒 and 𝐟𝑛𝑒 are the elemental nodal displacement and force vectors, respectively,
and matrices [𝑀]𝑒𝑙, [𝐶]𝑒𝑙, [𝐺]𝑒𝑙 and [𝐾]𝑒𝑙 are the elemental mass, damping, gyroscopic
and stiffness matrices, respectively.
4.2.2 Disc element
After assembling the matrices of the shaft elements, the constraints, including the disc,
are applied. The element mass matrix for the disc 𝑀𝑑 may be written as shown in
Equation (4.24) [21]
𝑀𝑑 = [
𝑚𝑑 0 0 00 𝑚𝑑 0 00 0 𝐼𝑑 00 0 0 𝐼𝑑
] (4.24)
where md and 𝐼𝑑 are the mass and diametral moment of inertia of the disc, respectively.
The element gyroscopic matrix for the disc 𝐺𝑑 can be written as [21]

CHAPTER 4 MATHEMATICAL MODELLING AND SIGNAL PROCESSING
91
𝐺𝑑 = [
0 0 0 00 0 0 00 0 0 𝐼𝑝0 0 −𝐼𝑝 0
] (4.25)
where 𝐼𝑝 is the polar moment of inertia. In case of disc with thickness 𝑡, inner diameter
𝐷𝑖 and outer diameter 𝐷𝑜, the polar and diametral moments of inertia can be calculated
as shown in the equation below:
𝐼𝑝 =1
32𝜌𝜋(𝐷𝑜
4 − 𝐷𝑖4)𝑡
and
𝐼𝑑 = 𝐼𝑝
2+𝑚𝑑𝑡
2
12= (
1
64𝜌𝜋(𝐷𝑜
4 − 𝐷𝑖4)𝑡) +
𝑚𝑑𝑡2
12
(4.26)
The EOM of the disc can be expressed as
[𝑀𝑑]�̈�𝑑 − Ω[𝐺𝑑]�̇�𝑑 = 𝐟𝑑 (4.27)
where the vectors 𝐝𝑑 and 𝐟𝑑 are the disc displacement and force vectors, respectively.
4.2.3 Foundation model
The effect of the foundation can be taken into consideration by adding additional terms
to the DOFs of the nodes where the bearings are located. Foundation can be modelled as
follows
[ 𝑚𝑓1𝑣 0 0 0 0
0 𝑚𝑓1ℎ 0 0 0
0 0 ⋱ 0 00 0 0 𝑚𝑓𝑡𝑣 0
0 0 0 0 𝑚𝑓𝑡ℎ]
{�̈�𝑓} +
[ 𝑐𝑓1𝑣 0 0 0 0
0 𝑐𝑓1ℎ 0 0 0
0 0 ⋱ 0 00 0 0 𝑐𝑓𝑡𝑣 0
0 0 0 0 𝑐𝑓𝑡ℎ]
{�̇�𝑓}
+
[ 𝑘𝑓1𝑣 0 0 0 0
0 𝑘𝑓1ℎ 0 0 0
0 0 ⋱ 0 00 0 0 𝑘𝑓𝑡𝑣 0
0 0 0 0 𝑘𝑓𝑡ℎ]
{𝐝𝑓} = {𝐟𝑓}
(4.28)
where the subscripts 𝑓 and 𝑡 denote the foundation and total number of bearings
respectively.

CHAPTER 4 MATHEMATICAL MODELLING AND SIGNAL PROCESSING
92
4.2.4 Influence of damping on the rotor dynamic model
Damping generally causes the dissipation of energy in the vibration system, which
depends on many factors such as joints, surrounding medium, frictions, material
intermolecular force and strength of the applied loads. Unlike mass and stiffness
matrices, the damping matrix cannot be constructed using material properties and
geometrical dimensions. However, the damping coefficient should be calculated in
order to understand the influence of the damping on the rotor dynamic model.
Some researchers [149, 151] discussed the theory of using the logarithmic decrement
method to calculate the damping ratio. It is defined as the natural logarithm of the ratio
of two consecutive amplitudes. This method is generally useful when dealing with
single-degree-of-freedom systems or in case of a system vibrating at a single frequency.
However, most of the systems in practise are multiple-degree-of-freedom and have
several natural frequencies; hence the logarithmic decrement method may not be only
related to a single natural frequency. In addition, the free oscillation could have
influence from various natural frequencies. Therefore, a different approach is generally
employed for the estimation of damping, namely the half-power spectrum method (also
called half-power point) [17].
The half-power spectrum method [150] is a simple and very good alternative for most
multiple-degree-of-freedom systems. Therefore, this method is employed in the current
research project. In order to understand the half power spectrum method, consider a
spring-damper-mass system that vibrates under the influence of an external force. The
equation of displacement of such structure in the frequency domain can be written as
follows
𝑥(𝑓)
𝐹(𝑓)=
1
(𝐾−𝑀𝜔2)+𝑗𝐶𝜔=
1𝐾⁄
(1−(𝑓
𝑓𝑛)2)+𝑗(2𝜁
𝑓
𝑓𝑛) (4.29)
where 𝜁 is the damping ratio and 𝑓𝑛 is the natural frequency. The amplitude of the
frequency response function (FRF) of the displacement to the force in terms of the non-
dimensional form can be written as shown in Equation (4.30).

CHAPTER 4 MATHEMATICAL MODELLING AND SIGNAL PROCESSING
93
𝑋(𝑓) =𝐾𝑥(𝑓)
𝐹(𝑓)=
1
√(1−(𝑓
𝑓𝑛)2)2
+(2𝜁𝑓
𝑓𝑛)2
(4.30)
where 𝑋(𝑓) is the non-dimensional amplitude of the FRF. At the natural frequency,
𝑋(𝑓) becomes:
𝑋(𝑓𝑛) =1
2𝜁 (4.31)
In terms of power:
𝑋2(𝑓𝑛) = (1
2𝜁)2
(4.32)
Hence, the half-power point will be 1
2(1
2𝜁)2
, and the non-dimensional amplitude is
written as 1
√2(1
2𝜁). Inserting the half-power point value in Equation (4.30) provides
1
2(1
2𝜁)2
=1
(1−(𝑓
𝑓𝑛)2)2
+(2𝜁𝑓
𝑓𝑛)2 (4.33)
When simplifying and solving Equation (4.33), two roots for the frequency 𝑓 are
produced:
𝑓1 = (1 − 𝜁)𝑓𝑛 and 𝑓2 = (1 + 𝜁)𝑓𝑛 (4.34)
Thus, the damping ratio can be estimated as shown in the equation below;
𝜁 =𝑓2−𝑓1
2𝑓𝑛 (4.35)
The half-power point is used in this research project to estimate the system damping
using the measured FRF plot. Figure 4.4 shows the FRF plot of the rotating machine
with only one balancing disc. The frequencies associated with the half-power amplitude
at the natural frequency, i.e. 17.09 Hz, are found to be:

CHAPTER 4 MATHEMATICAL MODELLING AND SIGNAL PROCESSING
94
𝑓1 = 16.817 Hz and 𝑓2 = 17.328 Hz
The frequencies 𝑓1 and 𝑓2 are also highlighted in Figure 4.4.
Figure 4.4 FRF plot indicating the natural frequency and half-power amplitudes (1st rig
configuration)
Therefore, the damping ratio for the system can be evaluated by applying Equation
(4.35) as follows:
𝜁 =𝑓2−𝑓1
2𝑓𝑛=17.328−16.817
2(17.09)= 0.0150 (1.5%) (4.36)
The half-power spectrum method is applied again to obtain the damping ratio for the
second configuration of the experimental rig (i.e. rotor with two balancing discs).
Figure 4.5 shows the FRF plot of the rotating machine with two balancing planes.
16.817 17.328
𝟓.𝟓𝟓
√𝟐= 𝟑.𝟗𝟐𝟒
𝒇𝒏:𝟏𝟕.𝟎𝟗
𝒂:𝟓.𝟓𝟓

CHAPTER 4 MATHEMATICAL MODELLING AND SIGNAL PROCESSING
95
Figure 4.5 FRF plot marking the natural frequency and half-power amplitudes (2nd
rig
configuration)
Thus, the damping ratio for the system can be evaluated by applying Equation (4.35) as
follows:
𝜁 =𝑓2−𝑓1
2𝑓𝑛=31.5116−30.406
2(31.13)= 0.0178 (1.78%) (4.37)
It is clear that the damping ratios for both rig configurations used in the current research
project are relatively small. This indicates that the influence of damping on the rotor
dynamic model is small. Hence, damping coefficient is not included in the model.
4.2.5 Modelling of the system
Assuming that rotating machine is vibrating because of unbalance-related inertia force
(𝐟𝑢𝑛𝑏), then EOM of the complete assembled rotor-bearing-foundation system may be
written as
[𝑀𝑠]{�̈�} + ([𝐶𝑠] + Ω[𝐺𝑠]){�̇�} + [𝐾𝑠]{𝐝} = {𝐟𝑢𝑛𝑏} (4.38)
where the subscript 𝑠 denotes the system, and 𝐝 can be written as
𝟏.𝟐𝟓𝟏
√𝟐= 𝟎.𝟖𝟖𝟒𝟔
30.406 31.5116
𝒇𝒏:𝟑𝟏.𝟏𝟑
𝒂:𝟏.𝟐𝟓𝟏

CHAPTER 4 MATHEMATICAL MODELLING AND SIGNAL PROCESSING
96
{𝐝} = [𝑢1, 𝑣1, 𝜃1, Ψ1, 𝑢2, 𝑣2, 𝜃2, Ψ2, … , 𝑢𝑛, 𝑣𝑛, 𝜃𝑛, Ψ𝑛]T (4.39)
where the subscript 𝑛 denotes the number of nodes in the system. The response and
unbalance force vectors may be expressed as
{𝐝(𝑡)} = {𝐃}𝑒𝑗𝜔𝑡 , and {𝐟𝑢𝑛𝑏(𝑡)} = {𝐅𝑢𝑛𝑏}𝑒𝑗𝜔𝑡 (4.40)
where {𝐃} and {𝐅𝑢𝑛𝑏} are the complex displacement and unbalance force vectors,
respectively. By substituting Equation (4.40) into Equation (4.38), we obtain
{𝐃} [−𝜔𝑖2[𝑀𝑠] + 𝑗𝜔𝑖[𝐶𝑠 + Ω𝐺𝑠] + [𝐾𝑠]] = {𝐅𝑢𝑛𝑏} (4.41)
where 𝜔 is the rotational speed of the machine in radians/second. The left hand side of
Equation (4.41) is known as the dynamic stiffness matrix (also called impedance
matrix) and usually denoted to as (𝐙). The size of each element matrix of the rotor-
bearing system is 8×8, and the size of the full-system matrices is 4(n) × 4(n). It is clear
from Figure 4.6 that the second node of each element is also the first node of the
adjacent element. Thus, the DOFs of the common nodes are affected by both elements.
In other words, element 1 affects only DOFs 1 to 8, element 2 affects only DOFs 5 to
12, element 3 affects only DOFs 9 to 17 and so on.
Assume a flexible rotor that includes 𝑛 number of nodes. Thus, after assembling the
elements matrices, and by considering the 𝑁𝑡ℎ measured frequency, Equation (4.41)
can be rewritten as:

CHAPTER 4 MATHEMATICAL MODELLING AND SIGNAL PROCESSING
97
(4.42)
After assembling the shaft matrices, the disc and foundation matrices should be added.
Assume the disc is positioned at the 4th
node, and the two massless bearings are located
at the first and last nodes. Hence Equation (4.42) becomes:
The rotor corresponding to Equation (4.43) is illustrated in Figure 4.6.
(4.43)
[ 24 0 0 0 −12 0 0 6𝑙0 24 0 0 0 −12 −6𝑙 00 0 8𝑙2 0 0 6𝑙 2𝑙2 00 0 0 8𝑙2 −6𝑙 0 0 2𝑙2
−12 0 0 −6𝑙 24 0 0 00 −12 6𝑙 0 0 24 0 00 −6𝑙 2𝑙2 0 0 0 8𝑙2 06𝑙 0 0 2𝑙2 0 0 0 8𝑙2]
[ 312 0 0 0 54 0 0 −13𝑙0 312 0 0 0 54 13𝑙 00 0 8𝑙2 0 0 −13𝑙 −3𝑙2 00 0 0 8𝑙2 13𝑙 0 0 −3𝑙2
54 0 0 13𝑙 312 0 0 00 54 −13𝑙 0 0 312 0 00 13𝑙 −3𝑙2 0 0 0 8𝑙2 0
−13𝑙 0 0 −3𝑙2 0 0 0 8𝑙2 ]
[M]en-1 [G]en-1
[K]en-1
[M]e1
[M]e2
[M]en-2
[G]e1
[G]e2
[G]e3
[G]en-2
[K]e1
[K]e2
[K]e3
[K]en-2
[M]e3
+ D (𝐸𝐼
𝑙3)
+D 𝑗𝜔𝑁 𝐅𝑢𝑛𝑏(𝑗𝜔𝑁) = −D𝜔𝑁2 (
𝜌𝐴𝑙
420)
(𝜌𝐴𝑙
420) (312) +𝑚𝑑 0 0 0
0 (𝜌𝐴𝑙
420) (312) +𝑚𝑑 0 0
0 0 (𝜌𝐴𝑙
420) (8𝑙2) + 𝐼𝑑 0
0 0 0 (𝜌𝐴𝑙
420) (8𝑙2) + 𝐼𝑑
𝐺1𝑣 + 𝐺𝑓1𝑣 0
0 𝐺1ℎ + 𝐺𝑓1ℎ
(𝜌𝐴𝑙
420) (156) +𝑀𝑓1𝑣 0
0 (𝜌𝐴𝑙
420) (156) +𝑀𝑓1ℎ
(𝐸𝐼
𝑙3) (12) + 𝐾𝑓𝑛𝑣 0
0 (𝐸𝐼
𝑙3) (12) +𝐾𝑓𝑛ℎ
(𝐸𝐼
𝑙3) (12) +𝐾𝑓1𝑣 0
0 (𝐸𝐼
𝑙3) (12) + 𝐾𝑓1ℎ
(𝜌𝐴𝑙
420) (156) +𝑀𝑓𝑛𝑣 0
0 (𝜌𝐴𝑙
420) (156) +𝑀𝑓𝑛ℎ
[M]en-1
[G]en-1
[K]en-1
[M]e1
[M]e2
[M]e3
[M]en-2
[G]e1
[G]e2
[G]e3
[G]en-2
[K]e1
[K]e2
[K]e3
[K]en-2
+ D
+ D𝑗𝜔𝑁 𝐅𝑢𝑛𝑏(𝑗𝜔𝑁) = −D𝜔𝑁2
𝐺𝑛𝑣 + 𝐺𝑓𝑛𝑣 0
0 𝐺𝑛ℎ + 𝐺𝑓𝑛ℎ

CHAPTER 4 MATHEMATICAL MODELLING AND SIGNAL PROCESSING
98
Figure 4.6 A simple schematic representation of the rotor system used to demonstrate the matrix assembly
Signal processing 4.3
The measured vibration signals during the transient operation conditions (i.e. run-up and
run-down) are very helpful for identifying faults in rotating machines. After storing the
time domain signal of the machine’s transient operation in a computer, further
processing on the signal can be performed to identify and diagnose the different rotor
faults [152, 153].
4.3.1 3D waterfall plot
When acquiring rotor vibration during machine’s run-up/run-down, the time domain
signal is usually divided into short segments. Then, an instantaneous spectrum for each
of these segments is obtained (i.e. short-time Fourier transform (STFT)) [17]. The mean
speed of each time segment is obtained from the RPM vs. time plot, and each spectrum
is stamped by the corresponding mean speed. The RPM vs. time plot is obtained with
the help of tachometer signal measured on a reference shaft of the rotating machine. The
set of spectra produced is usually called ‘RPMmap’.TheRPMmap can be plotted in
the form of 3D waterfall plot [154].
The 3D waterfall plot, also known as spectrum cascade plot, is a three-dimensional plot
with frequency on the 𝑥-axis, vibration amplitude on the 𝑦-axis and time/rotational
speed on the 𝑧-axis (i.e. vertical to 𝑥 and 𝑦 axes) [155]. The waterfall plot clearly
displays the alteration in spectral information with speed/time. Therefore, this kind of
plot can be a very useful tool for the identification of rotating machine malfunctions
including rotor mass unbalance. Also, one of the advantages of the waterfall plot is that
Front view Side view of 𝑭𝐛𝟐
𝒙
𝑭𝒃𝟐𝒚
𝑭𝒃𝟐𝒙
𝒛
𝒚 𝒚
𝑭𝐛𝟐 𝑭𝐛𝟏
𝒛 𝒙
E 1 E 2 E 3 E n-2 E n-1
No
de 2
No
de 3
No
de 5
No
de 4
No
de n
-1
No
de n
-2
E 4
No
de n
No
de 1

CHAPTER 4 MATHEMATICAL MODELLING AND SIGNAL PROCESSING
99
it can identify the machine’s critical speeds (i.e. resonant condition) that are being
excited during machine’s run-up/run-down. The critical speeds are shown as peaks at
fixed frequencies. Typical 3D waterfall plot is displayed in Figure 4.7.
Figure 4.7 Typical 3D waterfall plot
4.3.2 Order tracking
When malfunctions exist in rotating machines such as rotor unbalance, misalignment
and rotor rub, they produce vibrations at a frequency that is equal to machine’s
rotational speed or one of its harmonics/sub-harmonics [17, 156]. The harmonics/sub-
harmonics of the rotation frequency of the machine are known as orders [156].
Therefore, the rotation speed of the machine is referred to as order 1 (also known as
1×), twice the rotational speed is referred to as order 2 (i.e. 2×) and so forth. To
enhance understanding, consider a periodic function with five terms
𝑥(𝑡) = 2 sin(0.5 ∗ 2𝜋𝑓𝑡) + 2 sin(2𝜋𝑓𝑡) + 2 sin(2 ∗ 2𝜋𝑓𝑡) + 2 sin(3 ∗ 2𝜋𝑓𝑡) + 2 sin(4 ∗ 2𝜋𝑓𝑡) (4.44)
for 0 ≤ 𝑡 ≤ 0.1sec and 𝑓 = 60 Hz.
The time waveform corresponding to the signal in Equation (4.44) and its vibration
spectrum (i.e. vibration amplitude versus frequency) are shown in Figure 4.8(a) and
Figure 4.8(b) respectively. In this particular example, the vibration amplitude at 60 Hz
is referred to as order 1 (i.e. 1×), 30 Hz as order 0.5 (i.e. 0.5×), 120 Hz as order 2 (i.e.
2×), and so on as shown in Figure 4.8 [53].
Mag
(g
)
Frequency (Hz)

CHAPTER 4 MATHEMATICAL MODELLING AND SIGNAL PROCESSING
100
Figure 4.8 (a) Time waveform, (b) vibration spectrum of the time waveform
When the vibration related to the rotational speed occurs at the same frequency as the
machines critical speed, very high and dangerous levels of vibrations take place [156].
The harmonic as well as sub-harmonic orders of the rotation frequency of the machine
can be analysed using order tracking technique. The technique is called order tracking
as the rotation frequency and its harmonics are being tracked and used for further
analysis [157]. The order track diagram is a 2-dimensional plot that has the time (or
machine speed in case of transient operation) in the 𝑥-axis and the frequency component
of a particular order of the rotation frequency in the 𝑦-axis [158].
4.3.3 Bode plot
It has been found that each rotor fault is related to the rotation frequency or one of its
orders. For instance, the rotor mass unbalance is associated with the first order (1×) of
the rotating machine, and misalignment is mainly related to the second order (2×) [53,
159]. Furthermore, assume a gear with 22 teeth; the 22nd
order will show the gear mesh
frequency. When dealing with rotor mass unbalance, an extra plot is required (i.e.
machine speed in the 𝑥-axis and the phase angle corresponding to the frequency
component of a certain order of the rotation frequency in the 𝑦-axis). The plot of the
frequency component and its phase with machine speed is known as Bode plot [160]. A
(a)
(b) 𝟏 ×
𝟎.𝟓 ×
𝟒 ×
𝟑 × 𝟐 ×

CHAPTER 4 MATHEMATICAL MODELLING AND SIGNAL PROCESSING
101
typical Bode plots of the 1× and 2× frequency components for a machine that coasts-up
from 300 to 2700 RPM are shown in Figures 4.9 and 4.10 respectively.
Figure 4.9 Typical Bode plot of the 1× shaft displacement for machine coast-up
Figure 4.10 Typical Bode plot of the 2× shaft displacement for machine coast-up

CHAPTER 4 MATHEMATICAL MODELLING AND SIGNAL PROCESSING
102
Summary 4.4
This chapter started by explaining the steps of modelling a simple rotating machine. It
began with explaining the modelling of each part of the machine (i.e. shaft, disc and
foundation). Then, the different parts were assembled to form the complete rotating
machine. After that, the influence of the damping on the rotor dynamic model is
presented. The second part of this chapter briefly explained the signal processing used
in the current research project.

CHAPTER 5 SENSITIVITY ANALYSIS OF IN-SITU ROTOR BALANCING
103
CHAPTER 5
SENSITIVITY ANALYSIS OF IN-SITU
ROTOR BALANCING

CHAPTER 5 SENSITIVITY ANALYSIS OF IN-SITU ROTOR BALANCING
104
This chapter is a reformatted version of the following papers:
1. Title: Sensitivity analysis of in-situ rotor balancing
Authors: Sami M. Ibn Shamsah, Jyoti K. Sinha and Parthasarathi
Mandal
Status: Published in IMechE 11th
VIRM Conference Proceedings
2. Title: Precaution during the field balancing of rotating machines
Authors: Sami M. Ibn Shamsah, Jyoti K. Sinha and Parthasarathi
Mandal
Status: Published in Journal of Maintenance Engineering
Abstract: Rotor unbalance is one of the common faults in any rotating machine which
occurs regularly during their operation. This may cause an unacceptable level of
vibration leading to failure of the machine. Hence the regular field balancing is
generally carried out to keep the machine vibration within an acceptable limit. The
influence coefficient (IC) method is an acceptable field balancing method for rotating
machines. However, the current industrial practice is to apply the IC method at a single
machine rotating speed for the unbalance estimation. In the current study, the IC method
is used to estimate unbalance from vibration data acquired from a small experimental
rig at a single rotor speed as well as a wide range of speeds during machine run-up. It
was observed that the inclusion of more speeds during the run-up significantly improves
the unbalance estimation when compared to the estimation at a single speed. The current
paper presents the experimental rig, unbalance experiments conducted and the
sensitivity analysis of the unbalance estimation using speed ranging from a single speed
to multiple speeds.
Keywords: Rotating machines, rotor unbalance, influence coefficient method, order
tracking

CHAPTER 5 SENSITIVITY ANALYSIS OF IN-SITU ROTOR BALANCING
105
Introduction 5.1
The achievement of desired reliability targets of industrial rotating machines is often
hampered by the existence of various rotor-related faults including unbalance,
misalignment, cracks, shaft rub, etc. Faults in rotating machines are unpreventable due
to a number of reasons such as manufacturing/installation imperfections as well as
wears and tears owing to day-to-day operations. These rotor faults are major sources of
unwanted high vibrations in rotating machines such as compressors, pumps and gas
turbines. Since this class of machines plays very vital roles in the achievement of most
industrial objectives, it is therefore imperative to continuously sort for approaches that
simplify as well as enhance the detection and diagnosis of these faults at their early
stages. Although there are various commonly encountered rotor-related faults,
unbalance is amongst the most prevalent in rotating machines.
Over the years, vibration-based condition monitoring (VCM) techniques are
successfully used to detect and diagnose rotor unbalance [29, 51, 88, 99]. Amongst all
vibration based rotor balancing techniques, the most predominant approaches are the
modal balancing (MB) and the influence coefficient (IC) balancing methods [53]. The
MB method was firstly applied in the 1960s by Bishop et al. [31]. In order to apply this
balancing method efficiently, a highly skilled person with sound knowledge of rotor-
dynamics is required [43]. On the contrast, the IC method does not need any prior
knowledge of the dynamics of the rotor [17]. It requires only the vibration responses of
the rotor at different trial masses. It assumes that the rotor system is linear and the
influence of the individual unbalances can be superposed to give the influence of a set
of unbalances [29]. Therefore, due to its simplicity, the IC method is accepted as the
rotor balancing method in industries and plants around the world.
Comprehensive reviews of literature pertaining to the IC balancing method were
conducted by Darlow [29], Foiles et al. [88], Parkinson [101] and Zhou and Shi [19].
Yu [70] and Lee et al. [71] used the IC method to estimate the rotor unbalance at a
constant rotor speed. Zhou et al. [72] were successfully able to balance a rotor-bearing
system using the IC method during speed varying period. Dyer and Ni [73] have
extended the IC technique to the active control and on-line estimation. In their study,
they have successfully implemented an adaptive control scheme that combines flexible

CHAPTER 5 SENSITIVITY ANALYSIS OF IN-SITU ROTOR BALANCING
106
rotor balancing method and the on-line estimation of the IC using an active balancing
system. Recently, Xu and Fan [74] have used the IC method to balance a rigid rotor
using two balancing planes.
The current study aims to experimentally investigate the effect of rotor unbalance
estimation using the IC method to understand the influence of rotor speed ranging from
a single speed to multiple speeds on the unbalance estimation accuracy. The paper
presents the experimental rig, unbalance experiments conducted and the results of the
sensitivity analysis of the unbalance estimation using rotor speed ranging from a single
speed to multiple speeds.
Experimental rig 5.2
Figure 5.1 shows the experimental apparatus used for the experiments. The rig consists
of a solid shaft of length 1000mm and diameter 20mm. It is made of steel and supported
on relatively flexible foundation through two greased lubricated ball bearings. The shaft
also carries a steel balancing disc of 130mm diameter and 20mm thickness at midspan
between the two bearings. The disc contains staggered threaded holes (M5) in two
different pitch diameters, which are 70 and 120mm. The angle between two adjacent
holes for a particular pitch diameter is 30 degree. A flexible coupling made of
Aluminium connects the shaft to a 0.75kW, 3-Phase, 3000 RPM motor. Each of the two
ball bearings is mounted on flexible steel horizontal beam (530mm × 25mm × 3mm).
Each horizontal beam is screwed to two rectangular steel blocks (107mm × 25mm ×
25mm) that are screwed to a thick base plate (580mm × 150mm × 15mm) as shown in
Figure 5.1. Both base plates of the two bearing pedestals are mounted on a massive steel
platform. The bearing near the motor is denoted as B1 and the other bearing is denoted
as B2.
Experiments 5.3
The rotor was run-up in a speed range of 0 to 3000 RPM. A modal test was carried out
and two critical speeds of the machine (18 and 39 Hz) were found within the run-up
speed range. Two accelerometers with a sensitivity of 100mV/g were installed on each
of the two bearing housings. The accelerometers were mounted in the vertical and
horizontal directions at each bearing housing. The vibration responses were measured in

CHAPTER 5 SENSITIVITY ANALYSIS OF IN-SITU ROTOR BALANCING
107
both directions during eight machine run-ups (i.e. one with residual unbalance and
seven with added unbalance at a radius of 6cm). Since the rotor vibrations due to mass
unbalance are synchronous to the rotational speed, the measured vibration responses of
each run were order tracked to get the synchronous vibration components (both
amplitudes and phases) for all measurement locations. The order tracked responses (1×
responses) in the speed range from 420 to 2820 RPM (i.e. 7 to 47 Hz) with a spacing of
60 RPM (1 Hz) were then used for the unbalance estimations. The added unbalances
used for the different runs are listed in Table 5.1. Figure 5.2 demonstrates the unbalance
and phase angle with respect to the laser tacho sensor. Figure 5.3 shows a typically
measured vibration responses at the bearings B1 and B2 in the vertical direction for
different runs.
Figure 5.1 Photographic representation of the experimental rig
Accelerometer
Tachometer
𝒛
𝒚
𝒙
𝒙
𝒚
𝒚 𝒙
Shaft
Disc
Bearing
Motor
Flexible coupling
𝒛
𝒚
Bearing B2
Bearing B1
𝟑𝟎°

CHAPTER 5 SENSITIVITY ANALYSIS OF IN-SITU ROTOR BALANCING
108
Table 5.1 Unbalance and phase of 8 runs
Run no. Added unbalance (𝐠𝐜𝐦@𝛉°)
𝑟𝑢𝑛0 Residual unbalance 𝑒0
𝑟𝑢𝑛1 3g × 6cm @ 60° = 18gcm @ 60° 𝑒0 + 𝑒1
𝑟𝑢𝑛2 3g × 6cm @ 120° = 18gcm @ 120° 𝑒0 + 𝑒2
𝑟𝑢𝑛3 5g × 6cm @ 30° = 30gcm @ 30° 𝑒0 + 𝑒3
𝑟𝑢𝑛4 5g × 6cm @ 60° = 30gcm @ 60° 𝑒0 + 𝑒4
𝑟𝑢𝑛5 7g × 6cm @ 30° = 42gcm @ 30° 𝑒0 + 𝑒5
𝑟𝑢𝑛6 7g × 6cm @ 60° = 42gcm @ 60° 𝑒0 + 𝑒6
𝑟𝑢𝑛7 7g × 6cm @ 120° = 42gcm @ 120° 𝑒0 + 𝑒7
Figure 5.2 Demonstration of the added unbalance (mass and phase angle)
Figure 5.3 Typical measured 1× displacement responses in vertical direction for the experimental
runs 1, 4 and 6 at (a) B1 and (b) B2
𝒙
𝒚
Tachometer Laser beam
Reflective tape
Steel shaft
Disc
Added unbalance
Phase angle
(a)
(b)

CHAPTER 5 SENSITIVITY ANALYSIS OF IN-SITU ROTOR BALANCING
109
Unbalance estimation 5.4
The displacement vector 𝐝𝑝 of any machine at the bearing pedestals in the vertical and
horizontal directions during machine 𝑝th run-up can be written as
𝐝𝑝 = [𝐝𝑝(𝑓1) 𝐝𝑝(𝑓2) … 𝐝𝑝(𝑓𝑘) … 𝐝𝑝(𝑓𝑁)]T (5.1)
where 𝑓1, 𝑓2,…,𝑓𝑁 are the rotor run-up speeds in Hz.
At a single rotor speed 𝑓𝑘, the displacement vector 𝐝𝑝(𝑓𝑘) is written as
𝐝𝑝(𝑓𝑘) = [y1,𝑝(𝑓𝑘) x1,𝑝(𝑓𝑘) y2,𝑝(𝑓𝑘) x2,𝑝(𝑓𝑘)]T (5.2)
The variables y and x are the measured vertical and horizontal displacements at bearing
housing where the subscripts 1 and 2 represent bearings B1 and B2 respectively.
The sensitivity matrix for the IC method [17] can be written as
𝐒𝑝0 = 1
𝑒𝑝
[ 𝐝𝑝(𝑓1) − 𝐝0(𝑓1)
𝐝𝑝(𝑓2) − 𝐝0(𝑓2)
⋮𝐝𝑝(𝑓𝑁) − 𝐝0(𝑓𝑁)]
(5.3)
where 𝑒𝑝 is the added unbalance at run number 𝑝.
The residual rotor unbalance 𝑒0 can be calculated using the following equation:
𝐒𝑝0𝑒0 = 𝐝0 (5.4)
Equation (5.4) can further be modified to calculate the added unbalance directly for
each run;
𝐒𝑝0𝑒𝑞 = (𝐝𝑞 − 𝐝0) (5.5)

CHAPTER 5 SENSITIVITY ANALYSIS OF IN-SITU ROTOR BALANCING
110
where the subscript 𝑞 in Equation (5.5) represents the estimation of the unbalance for
the 𝑞th run. Table 5.2 lists the different scenarios (cases) used for the estimation of the
sensitivity matrices and the added unbalances.
Table 5.2 Sensitivity using different runs
Case no. Sensitivity Unbalance
Case I 𝑟𝑢𝑛3 − 𝑟𝑢𝑛0 𝑟𝑢𝑛4 − 𝑟𝑢𝑛0 𝑒4
Case II 𝑟𝑢𝑛4 − 𝑟𝑢𝑛0 𝑟𝑢𝑛1 − 𝑟𝑢𝑛0 𝑒1
Case III 𝑟𝑢𝑛5 − 𝑟𝑢𝑛0 𝑟𝑢𝑛3 − 𝑟𝑢𝑛0 𝑒3
Case IV 𝑟𝑢𝑛5 − 𝑟𝑢𝑛0 𝑟𝑢𝑛4 − 𝑟𝑢𝑛0 𝑒4
Case V 𝑟𝑢𝑛6 − 𝑟𝑢𝑛0 𝑟𝑢𝑛4 − 𝑟𝑢𝑛0 𝑒4
Case VI 𝑟𝑢𝑛7 − 𝑟𝑢𝑛0 𝑟𝑢𝑛2 − 𝑟𝑢𝑛0 𝑒2
Results and observations 5.5
Initially, the unbalance was estimated for all cases in Table 5.2 at a single rotor speed of
7 Hz (420 RPM), and then more speeds from the machine run-up were added gradually
to observe the influence on the unbalance estimation. The inclusion of multiple speeds
in the unbalance estimation is represented as Speed range and is defined as
Speed range = 𝑓1 + 𝑛(𝑑𝑓) = 7 Hz + 𝑛(1) (5.6)
where 𝑛 = 0, 1, … , 40.
The estimated unbalances (both amplitudes and phases) at different speed ranges for all
cases listed in Table 5.2 are shown in Figure 5.4. Actual added unbalance for each case
as well as the critical speeds of the rig are also shown in Figure 5.4 for the easy
comparison.

CHAPTER 5 SENSITIVITY ANALYSIS OF IN-SITU ROTOR BALANCING
111
(a)
(b)

CHAPTER 5 SENSITIVITY ANALYSIS OF IN-SITU ROTOR BALANCING
112
(c)
(d)

CHAPTER 5 SENSITIVITY ANALYSIS OF IN-SITU ROTOR BALANCING
113
Figure 5.4 The actual and estimated unbalances and phase angles for (a) case I, (b) case II, (c) case
III, (d) case IV, (e) case V and (f) case VI
(e)
(f)

CHAPTER 5 SENSITIVITY ANALYSIS OF IN-SITU ROTOR BALANCING
114
It can be observed from Figure 5.4 that using a single rotor speed to compute the rotor
unbalance might not provide the best unbalance estimation, hence leads to poor
balancing. In addition, it can be noticed that the estimated rotor unbalances using the
critical speeds and speeds around them are showing larger error in the estimation.
However, the inclusion of more run-up speeds in the unbalance estimation generally
provides much better and stable unbalance estimation in terms of both unbalance
amplitude and phase. The differences between the estimated and actual rotor unbalance
and phase is relatively small with higher speed range for all cases.
Further exercise for the unbalance estimation is also carried out at different single
speeds. It is observed that the estimated amplitudes and phases are scattered around the
actual unbalance when different single speeds are used to estimate rotor unbalance. It is
typically shown in Figure 5.5 for Case-II. This study also suggests that the utilisation of
a single machine speed may or may not estimate accurate rotor unbalance.
Figure 5.5 A typical comparison between the actual and estimated rotor unbalance at different
single speeds for Case II

CHAPTER 5 SENSITIVITY ANALYSIS OF IN-SITU ROTOR BALANCING
115
Conclusion 5.6
The current study investigates the application of field rotor balancing using the IC
method at a single speed as well as during machine run-up. Experiments were
conducted on a small laboratory rig with one balancing plane. It was shown that the
inclusion of more speeds during coast-up considerably improves the unbalance
estimation when compared to the estimation at a single speed. Therefore, it is better to
include a range of run-up or run-down speeds of the machine for effective machine
balancing.

CHAPTER 6 MULTI-PLANES ROTOR UNBALANCE ESTIMATION…
116
CHAPTER 6
MULTI-PLANES ROTOR UNBALANCE
ESTIMATION USING INFLUENCE
COEFFICIENT METHOD

CHAPTER 6 MULTI-PLANES ROTOR UNBALANCE ESTIMATION…
117
This chapter is a reformatted version of the following paper:
Title: Multi-planes rotor unbalance estimation using influence coefficient
method
Authors: Sami M. Ibn Shamsah, Jyoti K. Sinha and Parthasarathi Mandal
Status: Published in the Twelfth International Conference on Vibration
Engineering and Technology of Machinery (VETOMAC XII)
Abstract: The rotor mass unbalance is probably the most common rotor fault in any
rotating machine. If the rotor mass unbalance exceeds the allowable limit, it will cause
an excessive vibration which may lead to machine failure. Therefore, the regular in-situ
rotor balancing is often required to keep machine vibration within an acceptable level.
Current practice in industries is to use a single machine speed for balancing the rotor by
the Influence Coefficient (IC) method. This paper investigates the effect on the
unbalance estimation by the application of the IC method using measured machine
vibrations at a single speed as well as multiple speeds simultaneously during machine’s
transient operation (run-up or run-down). This study is carried out on an experimental
rotating rig with two balancing planes. The current paper presents the laboratory rig,
unbalance experiments carried out and the sensitivity analysis of the unbalance
estimation using measured machine response at speed ranging from a single speed to
multiple speeds.
Keywords: Rotating machines, rotor unbalance, influence coefficient method, order
tracking

CHAPTER 6 MULTI-PLANES ROTOR UNBALANCE ESTIMATION…
118
Introduction 6.1
Rotating machines form the bedrock of power plants as they are used in most of their
operations. Therefore, the reliability of this category of machines is of vital importance
for power plants. These machines are susceptible to a broad variety of faults owing to
many reasons such as machining errors and manufacturing shortcomings. The rotor is
one of the rotating machine’s main parts as well as the bearings and supporting
structure. The rotor mass unbalance, which occurs when the mass is unequally
distributed around the axis of rotation, is known as the most common malfunction that
causes the entire machine to vibrate [53]. If the amount of mass unbalance exceeds the
allowable limit, it might lead to detrimental effects on the entire machine. As a
consequence, machine downtime and unscheduled maintenance actions are required.
This, in turn, influences the operating cost negatively. Therefore, the regular balancing
of rotating machines is necessary to ensure safe machine operation and long service life.
Rotating machines such as steam turbine generators, pumps, motors, and so on are
balanced using either the influence coefficient (IC) method or the modal balancing
[161]. The former of these methods is widely used as it does not require any prior
knowledge of the underlying physics of the machine [17]. It requires machine runs with
trial masses that are equal to the number of rotor balancing planes in addition to
machine run with residual unbalance to obtain the ICs between the rotor and bearings
[17]. The IC balancing approach was firstly proposed in the 1930s [54].
Lee et al. [71] and Darlow [29] presented review papers concerning the IC balancing
technique. Sinha [17] explained the application of the IC balancing method on rotating
machines with single/multiple balancing planes and provided some examples. Den
Hartog [58] briefly discussed the IC technique for two balancing planes. Hopkirk [55]
formulated the two planes, two sensors, single speed balance procedure using ICs in the
manner as most modern procedures. Goodman [56] presented a least square approach to
extend the technique to multi-planes balancing using data acquired at different machine
speeds and measurement locations. This method was refined and verified in 1972 by
Tessarzik et al. [57].
In industry, the IC balancing method is generally applied using machine response
acquired at a single machine speed to balance the rotating machine. Therefore, the main

CHAPTER 6 MULTI-PLANES ROTOR UNBALANCE ESTIMATION…
119
thrust of this paper is to study the influence of applying the IC balancing method on a
rotating machine with multiple planes using vibration measurements acquired at single
speeds as well as multiple speeds in a single band.
Experimental rig 6.2
A laboratory scaled experimental rotating rig used in the study is shown in Figure 6.1.
The rig consists of a solid mild steel shaft of dimensions 1000mm (length) × 20mm
(diameter) which is supported on flexible supporting foundations through two ball
bearings. Two identical steel balancing discs of dimensions 130mm (outer diameter) ×
20mm (thickness) are attached to the shaft at distances of 240mm and 665mm from the
bearing closer to the motor. The disc that is closer to the motor is denoted as d1 and the
other disc as d2.
The rotor of the rig is connected to a motor shaft via a flexible coupling. The supporting
foundation of each bearing consists of a horizontal steel beam (530mm × 25mm ×
8mm) which is secured on the top of two rectangular steel blocks (107mm × 25mm ×
25mm) as shown in Figure 6.1. The complete rig is mounted on a massive steel
platform. The bearing near the motor is symbolised as B1 and the other bearing as B2.

CHAPTER 6 MULTI-PLANES ROTOR UNBALANCE ESTIMATION…
120
Figure 6.1 Mechanical layout of the test rig
Machine runs and data acquisition 6.3
The machine was run-up slowly from 300 to 3000 RPM (i.e. 5 to 50 Hz). A total of 6
run-ups were carried out where each run lasted for 135s. The machine speed was
increased linearly with time. The vibration responses on both bearing pedestals in the
vertical and horizontal directions were recorded using four accelerometers (sensitivity
0.1V/g) for each run-up. The measured vibration responses were then order tracked to
𝒙, horizontal
𝒚, vertical
𝒛
𝒚
𝒙
Bearing B2
Bearing B1
Disc d2
Disc d1

CHAPTER 6 MULTI-PLANES ROTOR UNBALANCE ESTIMATION…
121
obtain the 1× vibration component responses at bearings B1 and B2 in both vertical and
horizontal directions. Two critical speeds (i.e. around 22 and 31 Hz) were observed
within the run-up speed range (see Figure 6.2). The measured vibration responses in the
speed range from 15 to 40 Hz (i.e. 900 to 2400 RPM) with an interval of 0.5 Hz (30
RPM) were then used in the unbalance estimation. The different scenarios used for the
unbalance estimation are presented in Table 6.1.
Figure 6.2 Typical measured 1× displacement responses in horizontal direction for the
experimental runs 3 and 5 at bearings (a) B1 and (b) B2
1st critical speed
2nd
critical speed
1st critical speed
2nd
critical speed
(a)
(b)

122
Table 6.1 Mass unbalances and phase angles of 6 machine runs
Run no.
Added unbalance (𝐠𝐜𝐦@𝛉°)
Disc d1 Disc d2
𝑟𝑢𝑛0 Residual unbalance 𝑒01 Residual unbalance 𝑒02
𝑟𝑢𝑛1 3g × 6cm @ 30° = 18gcm @ 30° 𝑒01 + 𝑒11 Residual unbalance 𝑒02
𝑟𝑢𝑛2 Residual unbalance 𝑒01 3g × 6cm @ 30° = 18gcm @ 30° 𝑒02 + 𝑒22
𝑟𝑢𝑛3 3g × 6cm @ 90° = 18gcm @ 90° 𝑒01 + 𝑒31 5g × 6cm @ 30° = 30gcm @ 30° 𝑒02 + 𝑒32
𝑟𝑢𝑛4 5g × 6cm @ 60° = 30gcm @ 60° 𝑒01 + 𝑒41 7g × 6cm @ 150° = 42gcm @ 150° 𝑒02 + 𝑒42
𝑟𝑢𝑛5 7g × 6cm @ 30° = 42gcm @ 30° 𝑒01 + 𝑒51 3g × 6cm @ 330° = 18gcm @ 330° 𝑒02 + 𝑒52
CH
AP
TE
R 6
MU
LT
I-PL
AN
ES
RO
TO
R U
NB
AL
AN
CE
ESTIM
ATIO
N…

CHAPTER 6 MULTI-PLANES ROTOR UNBALANCE ESTIMATION…
123
Application of IC method 6.4
The application of the IC balancing method on rotating machine with multiple
correction planes requires machine runs equal to the number of planes plus one.
Therefore, in the case of two correction planes, at least three machine transient
operations (i.e. run-ups/downs) are required to perform balancing using the IC method.
The displacement vector 𝐃𝑚 of any machine at the bearing pedestals in the vertical and
horizontal directions during 𝑚𝑡ℎ machine’s run-up can be written as
𝐃𝑚 = [𝐃𝑚(𝑓1) 𝐃𝑚(𝑓2) … 𝐃𝑚(𝑓𝑘) … 𝐃𝑚(𝑓𝑁)]T (6.1)
where 𝑓1, 𝑓2,…,𝑓𝑁 are the rotor run-up speeds in Hz with 𝑓𝑁 as the maximum speed.
At a single rotor speed 𝑓𝑘, the displacement vector 𝐃𝑚(𝑓𝑘) is written as per the
following equation:
𝐃𝑚(𝑓𝑘) = [y1,𝑚(𝑓𝑘) x1,𝑚(𝑓𝑘) y2,𝑚(𝑓𝑘) x2,𝑚(𝑓𝑘)]T (6.2)
where y1,𝑚 and x1,𝑚 are displacements in the vertical and horizontal directions,
respectively, at bearing B1 for run number 𝑚, similarly the displacements y2,𝑚 and x2,𝑚
at bearing B2. The displacement vectors 𝐃0, 𝐃1 and 𝐃2 are used to construct the
sensitivity matrix 𝐒 as shown in Equation (6.3).
𝐒 =
[ 𝐃1(𝑓1)−𝐃0(𝑓1)
𝑒11𝐃1(𝑓2)−𝐃0(𝑓2)
𝑒11
⋮𝐃1(𝑓𝑁)−𝐃0(𝑓𝑁)
𝑒11
𝐃2(𝑓1)−𝐃0(𝑓1)
𝑒22𝐃2(𝑓2)−𝐃0(𝑓2)
𝑒22
⋮𝐃2(𝑓𝑁)−𝐃0(𝑓𝑁)
𝑒22 ]
(6.3)
where 𝑒11 is the added unbalance to disc d1 at run1 and 𝑒22 is the added unbalance to
disc d2 at run2.

CHAPTER 6 MULTI-PLANES ROTOR UNBALANCE ESTIMATION…
124
The sensitivity matrix together with the vibration measurements acquired at run0 are
used to obtain the residual rotor mass unbalances for discs d1 and d2 (i.e. 𝑒01 and 𝑒02)
as shown in the following equation
[𝐒] [𝑒01𝑒02] = [𝐃0] (6.4)
The added mass unbalances to both discs can be calculated for each run-up/down by
modifying Equation (6.4) as;
[𝐒] [𝑒𝑞1𝑒𝑞2] = [𝐃𝑞 − 𝐃0] (6.5)
where the subscripts 𝑞1 and 𝑞2 in Equation (6.5) represent the estimation of the mass
unbalances added to discs d1 and d2 for the 𝑞𝑡ℎ run, respectively.
Unbalance estimation and discussion 6.5
The IC method was used to estimate the rotor unbalance for all cases in Table 6.1. First,
the unbalance estimation was carried out using the measured vibrations at the machine
speed 15 Hz (900 RPM). Then, more speeds from the machine run-up were added
further to observe the influence on the rotor unbalance estimation. The inclusion of
multiple machine speeds in the unbalance estimation is represented as Speed range and
is defined as
Speed range = 𝑓1 + 𝑛(𝑑𝑓) = 15 Hz + 𝑛(0.5) (6.6)
where 𝑛 = 0, 1, … , 50.
The estimated amplitudes and phase angles of the added mass unbalances of discs d1
and d2 for runs 3, 4 and 5 at different speed ranges are presented in Figures 6.3, 6.4 and
6.5. For the sake of easy comparison, the actual added unbalances of both discs for each
case as well as the critical speeds are also shown in the figures.

CHAPTER 6 MULTI-PLANES ROTOR UNBALANCE ESTIMATION…
125
Figure 6.3 Actual and estimated unbalances (amplitude and phase) of (𝒓𝒖𝒏𝟑 − 𝒓𝒖𝒏𝟎) at (a) disc
d1 and (b) disc d2; * : estimated unbalance, : actual added unbalance
(b)
(a)

CHAPTER 6 MULTI-PLANES ROTOR UNBALANCE ESTIMATION…
126
Figure 6.4 Actual and estimated unbalances (amplitude and phase) of (𝒓𝒖𝒏𝟒 − 𝒓𝒖𝒏𝟎) at (a) disc
d1 and (b) disc d2; * : estimated unbalance, : actual added unbalance
(a)
(b)

CHAPTER 6 MULTI-PLANES ROTOR UNBALANCE ESTIMATION…
127
Figure 6.5 Actual and estimated unbalances (amplitude and phase) of (𝒓𝒖𝒏𝟓 − 𝒓𝒖𝒏𝟎) at (a) disc
d1 and (b) disc d2; * : estimated unbalance, : actual added unbalance
It can be clearly seen from Figures 6.3, 6.4 and 6.5 that when using machine vibration
responses acquired at a range of multiple speeds in a single band, the unbalance
estimation is significantly enhanced. Moreover, it can be observed that as the speed
range increases, the error between the estimated and actual unbalances (both amplitude
and phase) reduces significantly. It can also be noticed that the accuracy of the
(a)
(b)

CHAPTER 6 MULTI-PLANES ROTOR UNBALANCE ESTIMATION…
128
unbalance estimation using vibration measurements at both critical speeds is small
comparing to higher speed ranges.
Concluding remarks 6.6
The application of the IC balancing method using vibration data acquired from a small
test rig with two balancing planes at single and multiple speeds in a single band has
been studied in the current paper. The results indicate that the unbalance estimation at
both planes using measured vibration at a single machine speed may not be good
enough. However, the use of measured machine responses at more speeds from the
machine run-up/down increases the accuracy of the unbalance estimation. Thus, it is
better to use the full speed range of the transient operation of the rotating machine for
accurate and precise machine balancing.

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
129
CHAPTER 7
SENSITIVITY ANALYSIS OF THE
INFLUENCE COEFFICIENT
BALANCING METHOD FOR MULTIPLE
PLANES ROTOR BALANCING WITH
REDUCED NUMBER OF SENSORS

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
130
This chapter is reformatted version of the following papers:
1. Title: Reliable machine balancing for efficient maintenance
Authors: Sami M. Ibn Shamsah, Jyoti K. Sinha and Parthasarathi
Mandal
Status: Submitted to Journal of Quality in Maintenance Engineering
2. Title: Rotor unbalance estimation with reduced number of sensors
Authors: Sami M. Ibn Shamsah and Jyoti K. Sinha
Status: Published in Machines Journal
Abstract: Rotor mass unbalance inevitably presents in almost all rotating machines. If
the vibration amplitude level due to rotor mass unbalance exceeds a set allowable limit,
it may lead to catastrophic machine failure. This is generally not acceptable to any
industry as it results in machine downtime and unscheduled costly maintenance actions.
Hence, the regular field balancing is generally carried out to keep the machine vibration
within an acceptable level. The influence coefficient (IC) method is an acceptable on-
site vibration based balancing approach for rotating machines. However, the current
industrial applications of the IC method generally use vibration measurements acquired
at single machine speed using two vibration sensors at a bearing pedestal for the
unbalance estimation. In the present study, the same concept of the IC balancing method
is applied again but with using vibration data acquired from small test rig at a single
machine speed as well as multiple speeds in a single band during machine run-up. Four
scenarios are presented in the current paper. In the first scenario, the IC balancing
method is applied on a test rig with one balancing disc using vibration measurements
acquired in vertical and horizontal directions at single machine speeds. In the second
scenario, the IC balancing method is applied on a test rig with one balancing disc using
measured vibration responses in vertical and horizontal directions at multiple machine
speeds. Then, the IC balancing method is applied on a test rig with two balancing discs
using vibration measurements acquired at two directions as well as one direction at
multiple machine speeds. It is observed that the inclusion of a range of run-up/down

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
131
machine speeds in a single band significantly improves the unbalance estimation.
Furthermore, it is noticed that the application of the IC method using a single vibration
sensor per bearing location provides as accurate results as when applying the method
using two sensors per bearing location.
Keywords: Rotating machines, rotor unbalance, influence coefficient method, order
tracking
Introduction 7.1
Rotating machines are considered as the cornerstone of most energy/power plants,
petrochemical factories, etc., as they are used in most of their operations. For that
reason, the reliability and maintainability of this sort of machines are of paramount
importance for these plants. Typical rotating machines are made up of several integrated
components including rotating system, bearings, supporting structure, electric motor,
etc. There is a long list of malfunctions that often hinder the industrial rotating machines
from achieving their anticipated reliability targets [17, 78, 82]. Since this class of
machines plays a crucial role in the achievement of most industrial objectives, it is
therefore vitally important to continuously seek after new methods that simplify as well
as enhance the identification and diagnosis of rotating machine malfunctions at their
early stages [17, 53].
Rotor mass unbalance is one of the most common malfunctions in rotating machines
which occurs repeatedly throughout their operations [10]. This stimulus develops when
the mass is asymmetrically distributed around the axis of rotation [162]. If the machine
vibration due to rotor mass unbalance exceeds the maximum permissible levels, it may
lead to machine failure. As a consequence, machine downtime and unscheduled
maintenance actions will be required, which in turn influence the operating cost
negatively. Moreover, high levels of rotor mass unbalance may result in a significant
cutback of the machine fatigue life [12]. Therefore, the regular field balancing is
essential to keep the machine vibration within a permissible level. Owing to the fact that
machine vibration signals carry plentiful and valuable information concerning dynamics
and health of the machine parts, vibration-based rotor fault detection methods have been
immensely used for detecting rotor related faults, including rotor mass unbalance [53].

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
132
Many vibration based balancing techniques have been proposed in the literature [14-17,
31, 43, 48, 51, 56, 70, 71]. Generally, rotating machines balancing approaches can be
divided into two main groups, namely the influence coefficient (IC) balancing and the
modal balancing [54, 55, 72, 161, 163, 164]. In order to apply the latter method
efficiently, a highly skilled engineer with thorough knowledge of rotor-dynamics is
needed [43]. Darlow [50] presented some shortcomings of the modal balancing
approach. The IC balancing method, however, does not require any prior knowledge of
the underlying dynamics of the machine [17, 163, 164]. It only requires machine runs
with trial weights [17]. Therefore, due to its simplicity and high efficiency, the IC
method has become the traditional in-situ balancing approach in most industries around
the world.
Literature review papers pertaining to the IC balancing method were presented by
Darlow [29], Fang et al. [165], Zhou and Shi [19], Dyer and Ni [73] and Parkinson
[101]. Lund and Tonnesen [16] and Tessarzik et al. [57] have used the IC approach for
the rotor balancing. In his book, Sinha [17] has explained comprehensively the
application of the IC balancing approach for rotating machine with a single as well as
multiple balancing planes. He also presented graphical as well as mathematical
approaches, and provided some examples to enhance understanding. Yu [70] as well as
Lee et al. [71] used the IC method to estimate the rotor unbalance at a constant rotor
speed. Ibn Shamsah et al. [163, 164] have used this method and highlighted that the use
of more speeds simultaneously during the machine’s transient operation (i.e. run-up or
run-down) gives much better rotor unbalance estimates than at a single machine speed.
The current industrial application of the IC balancing method is to use vibration
response acquired at a single machine speed in multiple mutually perpendicular
directions at each bearing pedestal for the estimation of the rotor mass unbalance. It is
believed that the utilisation of the machine vibration measurements at multiple
orthogonal directions provides better machine dynamics, and hence the estimated
unbalance is likely to be more accurate. Therefore, the main thrust of this paper is to
investigate the application of the IC balancing method using only one sensor at a
bearing pedestal. The second objective of the current paper is to study the influence of
applying the IC balancing method using vibration measurements acquired at single
speeds and multiple speeds in a single band.

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
133
Theory of IC balancing method 7.2
Assume that the displacement vectors in the vertical and horizontal directions at all
bearing pedestals in a machine are 𝐝0, 𝐝1, 𝐝2,…,𝐝𝑛, where the subscripts denote the
1𝑠𝑡, 2𝑛𝑑, 3𝑟𝑑,…,(𝑛 + 1)𝑡ℎ machine run-ups respectively. The displacement vectors for
the different machine run-up speeds can be written as
𝐝0 = [𝐝0(𝑓1) 𝐝0(𝑓2) … 𝐝0(𝑓𝑘) … 𝐝0(𝑓𝑁)]T
𝐝1 = [𝐝1(𝑓1) 𝐝1(𝑓2) … 𝐝1(𝑓𝑘) … 𝐝1(𝑓𝑁)]T
𝐝2 = [𝐝2(𝑓1) 𝐝2(𝑓2) … 𝐝2(𝑓𝑘) … 𝐝2(𝑓𝑁)]T
⋮ 𝐝𝑛 = [𝐝𝑛(𝑓1) 𝐝𝑛(𝑓2) … 𝐝𝑛(𝑓𝑘) … 𝐝𝑛(𝑓𝑁)]
T
(7.1)
where 𝑓1, 𝑓2,…,𝑓𝑁 are the machine run-up speeds in Hz, with 𝑓𝑁 as the maximum
speed. Note that the displacement vector 𝐝0 is always for the machine 1𝑠𝑡 run with
residual rotor unbalance (i.e. without any trial masses on the balancing planes) that
needs to be balanced. Assume that the rotating machine has ℎ number of bearing
pedestals. Hence, the displacement vectors at a single rotor speed 𝑓𝑘 can be written as
𝐝1(𝑓𝑘) = [y1,1(𝑓𝑘) x1,1(𝑓𝑘) … yℎ,1(𝑓𝑘) xℎ,1(𝑓𝑘)]T
𝐝2(𝑓𝑘) = [y1,2(𝑓𝑘) x1,2(𝑓𝑘) … yℎ,2(𝑓𝑘) xℎ,2(𝑓𝑘)]T
⋮
𝐝𝑛(𝑓𝑘) = [y1,𝑛(𝑓𝑘) x1,𝑛(𝑓𝑘) … yℎ,𝑛(𝑓𝑘) xℎ,𝑛(𝑓𝑘)]T
(7.2)
where yℎ,𝑛 and xℎ,𝑛 are the displacements at the ℎ𝑡ℎ bearing pedestal in the vertical and
horizontal directions respectively for the (𝑛 + 1)𝑡ℎ machine run. In case of 𝑛 balancing
planes, the sensitivity matrix 𝐒 is constructed using the measured vibration responses as
written in Equation (7.3).
𝐒 =
[ 𝐝1(𝑓1)−𝐝0(𝑓1)
𝑒1,1
𝐝1(𝑓2)−𝐝0(𝑓2)
𝑒1,1
⋮𝐝1(𝑓𝑁)−𝐝0(𝑓𝑁)
𝑒1,1
𝐝2(𝑓1)−𝐝0(𝑓1)
𝑒2,2
𝐝2(𝑓2)−𝐝0(𝑓2)
𝑒2,2
⋮𝐝2(𝑓𝑁)−𝐝0(𝑓𝑁)
𝑒2,2
…
𝐝𝑛(𝑓1)−𝐝0(𝑓1)
𝑒𝑛,𝑛
𝐝𝑛(𝑓2)−𝐝0(𝑓2)
𝑒𝑛,𝑛
⋮𝐝𝑛(𝑓𝑁)−𝐝0(𝑓𝑁)
𝑒𝑛,𝑛 ]
(7.3)

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
134
where 𝑒1,1 is the added unbalance to the 1𝑠𝑡 balancing plane at the 2𝑛𝑑 machine run-up,
𝑒2,2 is the added unbalance to the 2𝑛𝑑 balancing plane at the 3𝑟𝑑 machine run-up and
𝑒𝑛,𝑛 is the added unbalance to the 𝑛𝑡ℎ balancing plane at machine run-up number 𝑛 + 1.
The residual rotor mass unbalance 𝐞0 for each balancing plane can then be calculated as
shown in Equation (7.4), below:
[𝐒]2ℎ𝑁×𝑛 [
𝑒1,0𝑒2,0⋮𝑒𝑛,0
]
𝑛×1
= [𝐝0]2ℎ𝑁×1 (7.4)
The rotor mass unbalance 𝐞 is a complex value and can further be written as
[ 1 𝑗 0 0 0 0 … 0 00 0 1 𝑗 0 ⋮ … 0 00 0 0 0 1 𝑗 ⋮ 0 00 0 0 0 0 0 ⋱ ⋮ ⋮⋮ ⋮ ⋮ ⋮ ⋮ ⋮ 𝑗 0 00 0 0 0 0 … 0 1 𝑗]
𝑛×2𝑛
[ 𝑟𝑒𝑎𝑙(𝑒1,0)
𝑖𝑚𝑎𝑔(𝑒1,0)
𝑟𝑒𝑎𝑙(𝑒2,0)
𝑚𝑎𝑔(𝑒2,0)
⋮𝑟𝑒𝑎𝑙(𝑒𝑛,0)
𝑖𝑚𝑎𝑔(𝑒𝑛,0)]
2𝑛×1
= 𝐓𝐞𝟎 (7.5)
where 𝐓 is the transformation matrix. Substituting Equation (7.5) into Equation (7.4)
gives
[𝐒]2ℎ𝑁×𝑛𝐓𝑛×2𝑛[𝐞𝟎]2𝑛×1 = [𝐝0]2ℎ𝑁×1 (7.6)
Equation (7.6) can be rewritten as
[𝐒𝑇]2ℎ𝑁×2𝑛[𝐞𝟎]2𝑛×1 = [𝐝0]2ℎ𝑁×1 (7.7)
where 𝐒𝑇 = 𝐒𝐓. The real and imaginary parts in Equation (7.7) are separated as
[𝑟𝑒𝑎𝑙 (𝐒𝑇)2ℎ𝑁×2𝑛𝑖𝑚𝑎𝑔 (𝐒𝑇)2ℎ𝑁×2𝑛
]4ℎ𝑁×2𝑛
[𝐞𝟎]2𝑛×1 = [𝑟𝑒𝑎𝑙(𝐝0)2ℎ𝑁×1𝑖𝑚𝑎𝑔(𝐝0)2ℎ𝑁×1
]4ℎ𝑁×1
(7.8)
Hence,

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
135
[𝐒𝑠]4ℎ𝑁×2𝑛[𝐞𝟎]2𝑛×1 = [𝐝0𝑠]4ℎ𝑁×1 (7.9)
Rearranging Equation (7.9) gives
𝐞𝟎 = [𝐒𝑠]+𝐝0𝑠 (7.10)
where [𝐒𝑠]+ is the Moore-Penrose pseudo-inverse of [𝐒𝑠] (i.e. [𝐒𝑠]
+ = ( 𝐒𝑠T𝐒𝑠)
−1𝐒𝑠T).
Equation (7.4) can be further modified to calculate the added unbalances at the different
planes simultaneously directly for each machine’stransientoperation;
[𝐒]2ℎ𝑁×𝑛 [
𝑒1,𝑞𝑒2,𝑞⋮𝑒𝑛,𝑞
]
𝑛×1
= [𝐝𝑞 − 𝐝0]2ℎ𝑁×1 (7.11)
where the subscript 𝑞 in Equation (7.11) represents the (𝑞 + 1)𝑡ℎ machine run-up. Thus,
Equation (7.11) can be rewritten as
𝐞q = [𝐒𝑠]+𝐝q,0𝑠
(7.12)
In case of measurements at one direction per bearing pedestal, the displacement vectors
are written as
𝐝0(𝑓𝑘) = [r1,0(𝑓𝑘) r2,0(𝑓𝑘) … rh,0(𝑓𝑘)]T
𝐝1(𝑓𝑘) = [r1,1(𝑓𝑘) r2,1(𝑓𝑘) … rh,1(𝑓𝑘)]T
𝐝2(𝑓𝑘) = [r1,2(𝑓𝑘) r2,2(𝑓𝑘) … rh,2(𝑓𝑘)]T
⋮𝐝𝑛(𝑓𝑘) = [r1,𝑛(𝑓𝑘) r2,𝑛(𝑓𝑘) … rh,𝑛(𝑓𝑘)]
T
(7.13)
where r1,𝑛(𝑓𝑘), r2,𝑛(𝑓𝑘) and rh,𝑛(𝑓𝑘) are the radial displacements at the 1𝑠𝑡, 2𝑛𝑑 and h𝑡ℎ
bearings pedestals respectively at the rotor speed 𝑓𝑘 for the (𝑛 + 1)𝑡ℎ machine’s
transient operation.

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
136
Example-1: rig with one balancing plane 7.3
Example 1 is related to the application of the IC balancing method on a small rotating
machine with one balancing plane, and measurements are taken at vertical and
horizontal directions. First, the unbalance is estimated using measured vibrations at
single machine speeds. Then, the unbalance is estimated using measured vibrations at
multiple rotor speeds together in a single band. A total of 6 machine run-ups are carried
out, and 4 unbalance estimation scenarios are used.
7.3.1 Experimental setup
A photograph of the test rig used for the experiments is provided in Figure 7.1. The
rotor consists of a solid steel shaft with a length of 1000mm and a diameter of 20mm
and is supported on somewhat flexible foundation through two greased lubricated ball
bearings. The shaft carries a steel balancing disc of 130mm diameter and 20mm
thickness at midspan between the two bearings. Two flanges with a diameter of 40mm
and thickness of 20mm each are added to the disc to ensure that the disc will not slip
during the rotor rotation. The disc contains staggered M5 tapped holes in two different
pitch diameters, which are 70mm and 120mm. The angle between two neighbouring
holes for a particular pitch diameter is 30°.
The rotor-bearing system is connected to an electrical motor via flexible coupling made
of Aluminium. Each of the two ball bearings is mounted on a thin steel horizontal beam
(530mm × 25mm × 3mm). Each horizontal beam is secured atop two rectangular steel
blocks (107mm × 25mm × 25mm) that are screwed to a thick base plate (580mm ×
150mm × 15mm). The supporting structure is mounted on a massive steel platform
using 4 screws. An anti-vibration (TICO) pad which has a thickness of 12mm is
attached to the bottom side of the steel platform to mitigate noise and vibration. The
bearing near the motor is denoted as B1 and the other bearing as B2.

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
137
Figure 7.1 Photographs of the rig (a) assembled rig, (b) balancing disc, (c) flexible coupling
7.3.2 Instrumentation
The dynamic response of the system is measured by Integrated Circuit Piezoelectric
(ICP) accelerometers which have a sensitivity of 100 mV/g. The sensors are mounted in
the vertical and horizontal directions of each bearing pedestal. The rotational speed of
the shaft was measured using a laser tachometer (Figure 7.2). The measured analogue
signals from the accelerometers and tachometer are conditioned and converted into
𝒛
𝒚
𝒙
Shaft
Balancing disc
Motor
Bearing B2
Bearing B1
Safety guard Control panel
Horizontal
beam
(a)
(b) (c)

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
138
digital signals using DAQ device with 4-input channels. The DAQ system is connected
to a personal computer (PC) to record the data and store it for further analysis. The
speed of the motor was controlled by software in the PC.
Figure 7.2 Laser tachometer
7.3.3 Modal tests
Modal testing has been conducted on the test rig at zero rotor speed. The impact
response technique [17] was used for the modal testing. The rig was excited using a 1.1
mV/g instrumented hammer. Then, the response of the machine was measured by seven
100 mV/g ICP accelerometers. The modal test was done first in the vertical direction.
Then, the accelerometers were repositioned in the horizontal direction, and the modal
test was conducted again. The first four natural frequencies by appearance were
observed at 17.09, 29.91, 31.13 and 58.59 Hz. Figure 7.3 shows a typical measured
Frequency Response Function (FRF) computed from the modal analysis.
Laser
tachometer
Reflective
tape

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
139
Figure 7.3 Typical measured FRF plots of the rotor at distance of 75cm from bearing B1, (a) vertical direction,
(b) horizontal direction
(a)
(b)

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
140
7.3.4 Experiments carried out
The vibration responses were measured in both bearing housings during 6 machine’s
transient operations (one run-up with residual unbalance and five run-ups with different
added mass unbalances at a radius of 6cm). For each machine run, the rotor was run-up
linearly in a speed range of 0 to 50 Hz. The measurements at each bearing are taken in
vertical and horizontal directions (see Figure 7.4). Since the rotor vibrations due to mass
unbalance are synchronous to the rotational speed, the measured vibration responses of
each run were order tracked to get the 1× (i.e. one multiplied by rotating frequency)
vibration component at the four measurement locations. The order tracked 1× vibration
components in the speed range from 7 to 47 Hz with a spacing of 1 Hz were then used
for the unbalance estimation. Two critical speeds were found in the speed range (i.e. at
around 18 and 29 Hz). The added unbalances used for the different runs are listed in
Table 7.1. Table 7.2 lists the different scenarios used for the estimation of the added
unbalances.
Figure 7.4 Typical arrangement of accelerometers on bearing pedestal
𝒙, horizontal
𝒚, vertical

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
141
Table 7.1 List of 6 machine runs with different added unbalances (mass and phase angles)
Run no. Added unbalance (𝐠𝐜𝐦@𝛉°)
𝑟𝑢𝑛0 Residual unbalance 𝑒0
𝑟𝑢𝑛1 7g × 6cm @ 30° = 42gcm @ 30° 𝑒0 + 𝑒1
𝑟𝑢𝑛2 3g × 6cm @ 120° = 18gcm @ 120° 𝑒0 + 𝑒2
𝑟𝑢𝑛3 5g × 6cm @ 30° = 30gcm @ 30° 𝑒0 + 𝑒3
𝑟𝑢𝑛4 5g × 6cm @ 60° = 30gcm @ 60° 𝑒0 + 𝑒4
𝑟𝑢𝑛5 3g × 6cm @ 60° = 18gcm @ 60° 𝑒0 + 𝑒5
Table 7.2 Different scenarios used for the estimation of the added unbalance
Case no. Sensitivity Unbalance % error
Case I
𝑟𝑢𝑛1 − 𝑟𝑢𝑛0
𝑟𝑢𝑛2 − 𝑟𝑢𝑛0 𝑒2 ±4%,+4°
Case II 𝑟𝑢𝑛3 − 𝑟𝑢𝑛0 𝑒3 ±14%,+1°
Case III 𝑟𝑢𝑛4 − 𝑟𝑢𝑛0 𝑒4 ±5%,+2°
Case IV 𝑟𝑢𝑛5 − 𝑟𝑢𝑛0 𝑒5 ±17%, 0°
Sensitivity analysis of unbalance estimation 7.4
The effect of estimating the rotor unbalance using measured machine responses of the
vertical and horizontal directions at single and multiple machine speeds is investigated
in the next two sub-sections.
7.4.1 Using single speed
The measured vibration data of machine run numbers 0 and 1 in Table 7.1 were
substituted in Equation (7.3) to construct the sensitivity matrix. Then, the displacement
vector of each rotor speed was used individually in Equation (7.11) and the rotor
unbalance was calculated. Typical estimated rotor mass unbalances using the individual
measured data are presented in Figure 7.5. Actual added unbalances as well as the
critical speeds of the rig are also shown in Figure 7.5 for the purpose of easy
comparison.

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
142
(a)
(b)

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
143
Figure 7.5 Comparison between the actual and estimated rotor unbalance for (a,b) case III, (c,d)
case IV; ○: estimated unbalance using different single speeds, ☆: error, : actual added
unbalance
(c)
(d)

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
144
7.4.2 Using speed range
Initially, the unbalance was estimated using measured vibration data from vertical and
horizontal directions at a single rotor speed of 7 Hz. Then, more speeds from the
machine run-up were added gradually, to observe the influence of including vibration
measurements at multiple rotor speeds together in a single band on the unbalance
estimation. The inclusion of multiple speeds in the unbalance estimation is represented
as Speed range and is defined as
Speed range = 𝑓1 + 𝑘(𝑑𝑓) = 7 Hz + 𝑘(1) (7.14)
where 𝑘 = 0, 1, … , 40.
Typical estimated rotor mass unbalances (both amplitudes and phases) at different speed
ranges are shown in Figure 7.6.

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
145
(a)
(b)

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
146
Figure 7.6 Comparison between the actual and estimated rotor unbalance for (a,b) case III, (c,d)
case IV; ○: estimated unbalance using speed range, ☆: error, : actual added unbalance
It can be observed from Figure 7.6 that using vibration measurements from a single as
well as few machine speed ranges to compute the rotor unbalance might not provide
accurate unbalance estimation, hence probably leads to poor balancing. Furthermore, it
(c)
(d)

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
147
can be noticed that the estimated rotor unbalances using the critical speeds and speeds
around them show larger error. However, the inclusion of vibration measurements from
more run-up speeds generally provides relatively accurate and stable unbalance
estimation in terms of both unbalance amplitude and phase. It can also be observed that
the unbalance estimation becomes stable from speed range 39 Hz onwards. Hence, the
maximum error of both amplitudes and phases in speed ranges from 39 to 47 Hz are
listed in Table 7.2.
Example-2: rig with two balancing planes 7.5
The same test apparatus used in the previous example is used in this case, but with two
modifications. The first modification is that a second disc that is identical to the first
one is added to the rig. The first and second discs are positioned at distances of 240mm
and 665mm from bearing B1, respectively. The second modification is using thicker
steel horizontal beams (530mm × 25mm × 8mm). The modified test rig is shown in
Figure 7.7. The disc closer to bearing B1 is symbolised as D1 and the other disc as D2.
A similar modal test procedure as in the previous rig has been conducted here. The first
four obtained natural frequencies by appearance were identified at 24.41 Hz, 31.13 Hz,
53.71 Hz and 84.23 Hz. Typical FRF is shown in Figure 7.8.
Figure 7.7 Photograph of the test rig with two balancing discs
𝒛
𝒚
𝒙
Bearing B2
Bearing B1
Disc D2
Disc D1

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
148
Figure 7.8 Typical measured FRF plots of the rotor at distance of 75cm from bearing B1 in (a)
vertical and (b) horizontal directions
(a)
(b)

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
149
7.5.1 Experiments carried out
The vibration responses were measured in both bearing housings during 13 machine
run-ups. The first run-up was with residual unbalance and the rest 12 run-ups were with
different added mass unbalances at a fixed radius of 6cm. For each machine run, the
rotor was run-up linearly in a speed range of 5 to 50 Hz. The measurements at each
bearing were taken in the vertical, horizontal and 45-degree directions (see Figure 7.9).
The order tracked 1× vibration components in the speed range from 15 to 40 Hz with a
spacing of 0.5 Hz were used for the unbalance estimation.
The added mass unbalances utilised for the different runs are listed in Table 7.3. The
different scenarios used for the calculation of the sensitivity and estimation of the added
unbalances are given in Table 7.4. Two critical speeds were found in the speed range
(i.e. at around 24 and 31 Hz).
Figure 7.9 A typical accelerometer installation at a bearing in 3 directions
𝒙, horizontal
𝒚, vertical 𝒓, radial(𝟒𝟓°)

150
Table 7.3 List of 13 machine run-ups with different added unbalances (mass and phase angles)
Run no. Added unbalance (𝐠𝐜𝐦@𝛉°)
Disc D1 Disc D2
𝑟𝑢𝑛0 Residual unbalance 𝑒1,0 Residual unbalance 𝑒2,0
𝑟𝑢𝑛1 3g × 6cm @ 30° = 18gcm @ 30° 𝑒1,0 + 𝑒1,1 Residual unbalance 𝑒2,0
𝑟𝑢𝑛2 Residual unbalance 𝑒1,0 3g × 6cm @ 30° = 18gcm @ 30° 𝑒2,0 + 𝑒2,2
𝑟𝑢𝑛3 7g × 6cm @ 60° = 42gcm @ 60° 𝑒1,0 + 𝑒1,3 3g × 6cm @ 150° = 18gcm @ 150° 𝑒2,0 + 𝑒2,3
𝑟𝑢𝑛4 5g × 6cm @ 60° = 30gcm @ 60° 𝑒1,0 + 𝑒1,4 7g × 6cm @ 150° = 42gcm @ 150° 𝑒2,0 + 𝑒2,4
𝑟𝑢𝑛5 7g × 6cm @ 30° = 42gcm @ 30° 𝑒1,0 + 𝑒1,5 3g × 6cm @ 330° = 18gcm @ 330° 𝑒2,0 + 𝑒2,5
𝑟𝑢𝑛6 5g × 6cm @ 180° = 30gcm @ 180° 𝑒1,0 + 𝑒1,6 3g × 6cm @ 30° = 18gcm @ 30° 𝑒2,0 + 𝑒2,6
𝑟𝑢𝑛7 5g × 6cm @ 330° = 30gcm @330° 𝑒1,0 + 𝑒1,7 3g × 6cm @ 210° = 18gcm @ 210° 𝑒2,0 + 𝑒2,7
𝑟𝑢𝑛8 3g × 6cm @ 90° = 18gcm @ 90° 𝑒1,0 + 𝑒1,8 5g × 6cm @ 30° = 30gcm @ 30° 𝑒2,0 + 𝑒2,8
𝑟𝑢𝑛9 3g × 6cm @ 30° = 18gcm @ 30° 𝑒1,0 + 𝑒1,9 5g × 6cm @ 90° = 30gcm @ 90° 𝑒2,0 + 𝑒2,9
𝑟𝑢𝑛10 3g × 6cm @ 120° = 18gcm @ 120° 𝑒1,0 + 𝑒1,10 5g × 6cm @ 270° = 30gcm @ 270° 𝑒2,0 + 𝑒2,10
𝑟𝑢𝑛11 3g × 6cm @ 90° = 18gcm @ 90° 𝑒1,0 + 𝑒1,11 7g × 6cm @ 240° = 42gcm @ 240° 𝑒2,0 + 𝑒2,11
𝑟𝑢𝑛12 5g × 6cm @ 90° = 30gcm @ 90° 𝑒1,0 + 𝑒1,12 7g × 6cm @ 60° = 42gcm @ 60° 𝑒2,0 + 𝑒2,12
CH
AP
TE
R 7 S
EN
SIT
IVIT
Y A
NA
LY
SIS
OF
TH
E IN
FL
UE
NC
E COEFFICIENT…

151
Table 7.4 Different scenarios used for the added unbalance estimation
Case no. Sensitivity Unbalance Disc D1 Disc D2 % error, D1 % error, D2
Case I
𝑟𝑢𝑛1 − 𝑟𝑢𝑛0
𝑟𝑢𝑛2 − 𝑟𝑢𝑛0
𝑟𝑢𝑛3 − 𝑟𝑢𝑛0 𝑒1,3 𝑒2,3 ±24% , ±5° ±49% , ±11°
Case II 𝑟𝑢𝑛4 − 𝑟𝑢𝑛0 𝑒1,4 𝑒2,4 ±13% , ±5° +30% , ±12°
Case III 𝑟𝑢𝑛5 − 𝑟𝑢𝑛0 𝑒1,5 𝑒2,5 ±20% , +7° +34% , ±8°
Case IV 𝑟𝑢𝑛6 − 𝑟𝑢𝑛0 𝑒1,6 𝑒2,6 +23% , ±7° ±22% , +13°
Case V 𝑟𝑢𝑛7 − 𝑟𝑢𝑛0 𝑒1,7 𝑒2,7 +40% , ±5° ±27% , +25°
Case VI 𝑟𝑢𝑛8 − 𝑟𝑢𝑛0 𝑒1,8 𝑒2,8 +27% , ±4° +27% , ±22°
Case VII 𝑟𝑢𝑛9 − 𝑟𝑢𝑛0 𝑒1,9 𝑒2,9 ±19% , +6° +30% , ±12°
Case VIII 𝑟𝑢𝑛10 − 𝑟𝑢𝑛0 𝑒1,10 𝑒2,10 ±13% , ±13° +30% , ±3°
Case IX 𝑟𝑢𝑛11 − 𝑟𝑢𝑛0 𝑒1,11 𝑒2,11 ±4% , +11° +25% , ±5°
Case X 𝑟𝑢𝑛12 − 𝑟𝑢𝑛0 𝑒1,12 𝑒2,12 +20% , ±13° +10% , ±9°
CH
AP
TE
R 7 S
EN
SIT
IVIT
Y A
NA
LY
SIS
OF
TH
E IN
FL
UE
NC
E COEFFICIENT…

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
152
Sensitivity analysis of unbalance estimation 7.6
This section presents a comparison between the application of the IC unbalance
estimation approach using measured response at two orthogonal directions and one
direction.
7.6.1 Using vertical and horizontal responses
The measured vibration responses at vertical and horizontal directions were used
together to estimate the rotor unbalance of all cases in Table 7.4. First, the unbalance
estimation was carried out using measured vibrations at the first machine speed 15 Hz.
Then, more speeds from the machine coast-up were added steadily. Same definition of
Speed range as in Equation (7.14) is used here but with changing 𝑓1 to 15 Hz, 𝑑𝑓 to 0.5
Hz and 𝑘 to 0, 1, … , 50. Typical estimated added unbalances of both discs at different
machine speed ranges are presented in Figures 7.10 to 7.13.

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
153
(a)
(b)

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
154
Figure 7.10 Case I (a) disc D1 (𝒆𝟏,𝟑), (b) error of unbalance in disc D1, (c) disc D2(𝒆𝟐,𝟑), (d) error
of unbalance in disc D2; ○: estimated unbalance, ☆: error, : actual added unbalance
(c)
(d)

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
155
(a)
(b)

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
156
Figure 7.11 Case II (a) disc D1 (𝒆𝟏,𝟒), (b) error of unbalance in disc D1, (c) disc D2(𝒆𝟐,𝟒), (d) error
of unbalance in disc D2; ○: estimated unbalance, ☆: error, : actual added unbalance
(c)
(d)

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
157
(a)
(b)

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
158
Figure 7.12 Case IV (a) disc D1 (𝒆𝟏,𝟔), (b) error of unbalance in disc D1, (c) disc D2(𝒆𝟐,𝟔), (d) error of
unbalance in disc D2; ○: estimated unbalance, ☆: error, : actual added unbalance
(d)
(c)

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
159
(a)
(b)

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
160
Figure 7.13 Case IX (a) disc D1 (𝒆𝟏,𝟏𝟏), (b) error of unbalance in disc D1, (c) disc D2(𝒆𝟐,𝟏𝟏), (d) error of
unbalance in disc D2; ○: estimated unbalance, ☆: error, : actual added unbalance
It can be clearly seen from Figures 7.10 to 7.13 that when using vibration measurements
acquired from vertical and horizontal directions together at a range of multiple machine
speeds in a single band, the unbalance estimation is significantly enhanced for both
(c)
(d)

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
161
balancing planes. Moreover, it can be observed that as the speed range increases, the
error between the estimated and actual unbalances becomes fairly small. It has been
found that the unbalance estimation becomes stable from speed range 35 Hz onwards.
Hence, the maximum error of both amplitudes and phases in speed ranges 35 to 40 Hz
are also listed in Table 7.4. It can also be noticed that the accuracy of the unbalance
estimation using vibration measurements at both critical speeds is low comparing to
higher speed ranges.
7.6.2 Using radial responses only
Instead of using two vibration sensors at a bearing pedestal in both horizontal and
vertical directions, just a single sensor is used at each pedestal, hence reducing the
number of sensors by 50%. Although the vibration measurement at any one direction is
possible to use in the proposed balancing approach, it is preferred to use measurements
at 45 degree to the vertical/horizontal directions (i.e. 𝒓 in Figure 7.9) in the current
study. The reason is that amongst all other directions, the measurements at this direction
are likely to have the most significant content of vibration behaviour from both
orthogonal directions. Same unbalance estimation scenarios and speed range definition
as in sub-section 7.6.1 (Tables 7.3 and 7.4) are repeated here. Table 7.5 presents the
different unbalance estimation cases. Typical estimated added unbalances of both discs
at different speed ranges are provided in Figures 7.14 to 7.17.

162
Table 7.5 List of 10 scenarios used for the added unbalance estimation
Case no. Sensitivity Unbalance Disc D1 Disc D2 % error, D1 % error, D2
Case I
𝑟𝑢𝑛1 − 𝑟𝑢𝑛0
𝑟𝑢𝑛2 − 𝑟𝑢𝑛0
𝑟𝑢𝑛3 − 𝑟𝑢𝑛0 𝑒1,3 𝑒2,3 +26% , ±1° ±5% , ±10°
Case II 𝑟𝑢𝑛4 − 𝑟𝑢𝑛0 𝑒1,4 𝑒2,4 +16% , ±10° +56% , ±4°
Case III 𝑟𝑢𝑛5 − 𝑟𝑢𝑛0 𝑒1,5 𝑒2,5 +10% , ±14° +28% , ±4°
Case IV 𝑟𝑢𝑛6 − 𝑟𝑢𝑛0 𝑒1,6 𝑒2,6 +30% , +2° ±6% , ±4°
Case V 𝑟𝑢𝑛7 − 𝑟𝑢𝑛0 𝑒1,7 𝑒2,7 +37% , +5° ±20% , +5°
Case VI 𝑟𝑢𝑛8 − 𝑟𝑢𝑛0 𝑒1,8 𝑒2,8 +40% , ±5° ±27% , +25°
Case VII 𝑟𝑢𝑛9 − 𝑟𝑢𝑛0 𝑒1,9 𝑒2,9 +4% , ±8° +21% , ±9°
Case VIII 𝑟𝑢𝑛10 − 𝑟𝑢𝑛0 𝑒1,10 𝑒2,10 +15% , +6° +21% , ±13°
Case IX 𝑟𝑢𝑛11 − 𝑟𝑢𝑛0 𝑒1,11 𝑒2,11 +26% , +8° +20% , ±12°
Case X 𝑟𝑢𝑛12 − 𝑟𝑢𝑛0 𝑒1,12 𝑒2,12 +33% , ±7° +17% , ±5°
CH
AP
TE
R 7 S
EN
SIT
IVIT
Y A
NA
LY
SIS
OF
TH
E IN
FL
UE
NC
E COEFFICIENT…

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
163
(a)
(b)

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
164
Figure 7.14 Case I (a) disc D1 (𝒆𝟏,𝟑), (b) error of unbalance in disc D1, (c) disc D2(𝒆𝟐,𝟑),
(d) error of unbalance in disc D2; ○: estimated unbalance, ☆: error, : actual added
unbalance
(c)
(d)

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
165
(a)
(b)

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
166
Figure 7.15 Case II (a) disc D1 (𝒆𝟏,𝟒), (b) error of unbalance in disc D1, (c) disc D2 (𝒆𝟐,𝟒),
(d) error of unbalance in disc D2; ○: estimated unbalance, ☆: error, : actual added
unbalance
(c)
(d
)

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
167
(a)
(b)

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
168
Figure 7.16 Case IV (a) disc D1 (𝒆𝟏,𝟔), (b) error of unbalance in disc D1, (c) disc D2 (𝒆𝟐,𝟔),
(d) error of unbalance in disc D2; ○: estimated unbalance, ☆: error, : actual added
unbalance
(c)
(d)

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
169
(a)
(b)

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
170
Figure 7.17 Case IX (a) disc D1 (𝒆𝟏,𝟏𝟏), (b) error of unbalance in disc D1, (c) disc D2
(𝒆𝟐,𝟏𝟏), (d) error of unbalance in disc D2; ○: estimated unbalance, ☆: error, : actual
added unbalance
It can be observed from Figures 7.14 to 7.17 that when using machine vibration
responses measured at only one direction (i.e. 45-degree direction) at a range of
(c)
(d)

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
171
multiple speeds in a single band, the unbalance estimation is reasonably accurate.
Moreover, it can be observed that the unbalance estimation becomes stable and fairly
accurate after passing 35 Hz. Therefore, the maximum amplitude and phase errors of
both balancing planes in the speed range of 35 to 40 Hz for all cases are listed in
Table 7.5.
Comparison of results 7.7
Figure 7.18 shows a grouped bar chart that compares the results of the estimated rotor
mass unbalance using orthogonally mounted pair of sensors at a bearing pedestal and a
single sensor per bearing pedestal (i.e. mounted at 45 degree to vertical/horizontal
directions). The results of the estimated rotor unbalance using measured vibrations at
vertical direction only as well as horizontal direction only are also shown in
Figure 7.18. It can be noticed from Figure 7.18 that the estimated added unbalances
using vibration data from two sensors as well as single sensor per bearing pedestal are
of good accuracy.

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
172
Figure 7.18 Grouped bar chart of the comparison between actual and estimated unbalances
for (a) disc D1, and (b) disc D2
Overall observations 7.8
It can be observed from Section 7.4 that as the speed range increases, the rotor mass
unbalance estimation (both amplitude and phase) greatly enhanced. Therefore, it is
better to use vibration measurements at multiple rotor speeds together in a single band
for effective machine balancing. Furthermore, it can be noticed that the accuracy of the
unbalance estimation using vibration measurements at critical speeds is low comparing
to higher speed ranges.
Comparing Figures 7.10 to 7.13 with Figures 7.14 to 7.17 respectively, it is easy to see
that the unbalance estimation using measured machine vibration at one direction is as
accurate and precise as when using measured vibration at two orthogonal directions.
Therefore, the current industrial application of the IC method can be improved by using
(a)
(b)

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
173
a single sensor per bearing pedestal (at 45-degree direction) instead of two sensors. The
reduction of vibration sensors by half is of great benefit to any industry that has rotating
machines because it will reduce the time and computational effort in the signal
processing significantly, hence estimating rotor unbalance faster and more effective.
Concluding remarks 7.9
This paper studied the application of the IC balancing method using vibration data
acquired from a small test rig with single/multiple balancing planes at single speed as
well as various speed ranges. Moreover, the influence of estimating the rotor unbalance
using single vibration sensor per bearing location instead of two has been investigated.
First, the IC method has been applied on a small size laboratory rig with one balancing
plane using vibration measurements acquired from vertical and horizontal directions.
Then, the experimental apparatus was modified by adding a second balance disc, and
the same estimation procedure was repeated. After that, the same concept of the IC
unbalance estimation method was used again but with reduced number of sensors.
Instead of using two vibration sensors at a bearing pedestal in both vertical and
horizontal directions, only one sensor at a bearing pedestal is used; hence reducing the
number of sensors by half.
The results indicate that the unbalance estimation using measured vibrations acquired at
a single machine speed may not be good enough. Furthermore, it was observed that the
certainty of reliably achieving an accurate and precise rotor mass unbalance estimation
using vibration response acquired at low-speed ranges is low. On the other hand, the
application of the IC method using vibration measurements acquired at higher speed
ranges in a single band considerably improves the accuracy of the unbalance estimation.
Thus, it is better to use higher speed ranges of the run-up/run-down of the rotating
machine for accurate and precise machine balancing.
Also, it can be noticed for all cases that when using vibration measurements acquired at
critical speeds, the unbalance estimation becomes inaccurate and provides misleading
results. The unbalance estimation in the case of reduced number of sensors provided as
accurate results as when using orthogonally mounted pair of sensors at a bearing
housing as presented in Figure 7.18. The proposed application of the IC balancing
method with reduced number of sensors could be beneficial to industries as it helps to

CHAPTER 7 SENSITIVITY ANALYSIS OF THE INFLUENCE COEFFICIENT…
174
analyse the measured data in a timely manner and hence detect unbalance and take
balancing decision faster. Furthermore, the significant reduction in the number of
sensors is expected to reduce the likelihood of tripping the rotating machine as a result
of false signal from a faulty vibration sensor.

CHAPTER 8 MATHEMATICAL MODEL-BASED ROTOR UNBALANCE…
175
CHAPTER 8
MATHEMATICAL MODEL-BASED
ROTOR UNBALANCE ESTIMATION
USING A SINGLE MACHINE RUNDOWN
WITH REDUCED NUMBER OF SENSORS

CHAPTER 8 MATHEMATICAL MODEL-BASED ROTOR UNBALANCE…
176
This chapter is a reformatted version of the following paper:
Title: Rotor unbalance estimation using a single machine rundown with
reduced number of sensors
Authors: Sami M. Ibn Shamsah and Jyoti K. Sinha
Status: Published in the Proceedings of the International Conference on
Engineering Vibration (ICoEV 2015)
Abstract: Earlier proposed methods in the literature on the rotor unbalance and
foundation model estimation using a single machine run-down data have used vibration
measurements at all bearing pedestals in both lateral and vertical orthogonal directions.
It is generally believed that the measurement in both directions provides the bigger
picture of machine dynamical behaviour. However, in the present study, the concept of
the earlier method is used again but with reduced number of sensors. Instead of using 2
vibration sensors at a bearing pedestal in both lateral and vertical directions, just a
single sensor is used at each pedestal, hence reducing the number of sensors by 50%.
The sensor is mounted in the radial direction (45 degree to both lateral and vertical
directions) so that the measured vibration data will have a significant content of
vibration behaviour from both directions. The concept is applied to a simple simulated
rig of a rotor having a balancing disc and supported on either side by a ball bearing on a
flexible foundation. The paper presents the modelling details and comparison of several
unbalance estimations in the simulated rig example.
Keywords: Rotor unbalance, foundation model, vibration monitoring, fault diagnosis,
rotating machinery
Introduction 8.1
The reliability of rotating machines is essential to industries and plants around the world
as most of their activities rely on this class of machines. Over the years, with the
development of engineering and material science, industries have tended to use high-
speed flexible rotating machines which are supported by lightweight fabricated steel
structures and run for extended periods of time. As these flexible foundations usually

CHAPTER 8 MATHEMATICAL MODEL-BASED ROTOR UNBALANCE…
177
have natural frequencies below the operating speed of the machine, their effect should
be taken into consideration in the routine condition monitoring and associated
maintenance strategy. Neto et al. [114] have highlighted the effects of the flexible
foundation on the rotating machine by presenting some real case studies.
Many researchers proposed methods for the identification of rotating machines
foundation model [117]. Overview of the different experimental modal analysis
approaches was provided by Irretier [166]. Stephenson et al. [118] applied modal
analysis methods to determine the foundation’s dynamic characteristics from a test in
terms of FRFs. Lees et al. [102] gave an overview of the research on the model-based
identification of foundation model as well as presenting a brief theory of this approach.
It has been found that using measured vibration response at the bearing locations
together with an acceptable numerical model for the rotor and a reasonably accurate
model for the bearings seems to be the most promising approach to identify the
foundation model and rotor faults simultaneously [26, 102, 124]. Some researchers
recently proposed vibration based condition monitoring (VCM) techniques that use few
sensors, without necessarily compromising the valuable information required for the
diagnosis [78].
The existing rotor unbalance and foundation model identification approaches [25, 26]
used two orthogonal vibration sensors per bearing location. These methods are not very
practical for large and complex rotating machines as they could be computationally
involved and time-consuming as well as significantly relying on experience and
engineering judgment during data analysis. Therefore, the current study aims to improve
the existing approaches by presenting a simplified and computationally efficient method
for identifying and quantifying the state of rotor unbalance and foundation model in
rotating machines using response from a single vibration sensor per bearing location
and vibration measurements from a single machine’srun-up.
Earlier method 8.2
Earlier rotor fault identification method [25] used vibration response measurements
from vertical and lateral directions (i.e. 𝑣𝑘 and 𝑢𝑘 in Figure 8.1 (b) respectively) to
estimate the state of rotor unbalance (both amplitude and phase) and foundation model

CHAPTER 8 MATHEMATICAL MODEL-BASED ROTOR UNBALANCE…
178
from a single machine coast-down (Figure 8.1). In their model, each node consists of 4
degrees of freedom (2 translational and 2 rotational), i.e. [𝑢, 𝑣, 𝜃,Ψ]T, as shown in
Figure 8.2.
Figure 8.1 (a) Schematic representation of the rig, (b) measurements are taken in the radial direction
𝒛
𝒙
𝒚
Front view Side view
𝒙
𝑭𝒚
𝑭𝒙
𝒛
(b)
Bearing front view Bearing side view
𝒖𝒌
𝒗𝒌 𝒓𝒌𝟏 𝒓𝒌𝟐
𝟒𝟓°
𝟒𝟓°
(a)
𝒚 𝒚
𝑭𝟐
A
A
𝑭𝟏
𝒛 𝒙

CHAPTER 8 MATHEMATICAL MODEL-BASED ROTOR UNBALANCE…
179
Figure 8.2 A rotor element with degrees of freedom (a) horizontal plane, (b) vertical plane, (c)
combination of horizontal and vertical
Proposed method 8.3
The current approach aims to investigate the feasibility of estimating the foundation
model and state of rotor unbalance using a reduced number of vibration measurements
from a single machine’s run-up. Same formulation as the earlier method [25] is used,
but instead of using two vibration sensors per bearing location, i.e. one measures
vertical response and the other measures lateral response, only one sensor is used. In
order to have significant content of vibration behaviour from vertical and horizontal
directions, the response is taken from the radial direction, i.e. 𝑟𝑘1 or 𝑟𝑘2 in Figure 8.1
(b). Schematic representation of the rig used in the numerical simulation is shown in
Figure 8.3.
Figure 8.3 Schematic representation of the rotor
𝒛
𝒚
(a) (b)
𝚿𝒌 𝛉𝒌
𝒖𝒌 𝒖𝒍
𝚿𝒍
𝒗𝒌 𝒗𝒍 𝛉𝒍
𝒛
𝒙
(c) O
𝒛
𝒚
𝒖𝒍
𝒙 𝒖𝒌
𝚿𝒌 𝒗𝒌
𝛉𝒌 𝒗𝒍
𝛉𝒍
𝚿𝒍
Node 24 Node 1
Nod
e 3
Nod
e 21
Nod
e 22
Nod
e 23
Nod
e 2
E.1 . . . . E.2 E.21 E.3 . E.22 E.23
Front view Side view
𝒛
𝒚 𝒚
𝒛 𝒙
𝑭𝟐𝒓 𝑭𝟏𝒓 𝑭𝒓
𝒙
Nod
e 15
45∘ from 𝒙 and 𝒚 axes

CHAPTER 8 MATHEMATICAL MODEL-BASED ROTOR UNBALANCE…
180
8.3.1 Theory
In the construction of typical rotating machinery, the rotor, bearings and machine
supporting structure (foundation) are often considered as the major components, where
the rotor is connected to the flexible machine supporting structure through the bearings.
The equation of motion of such structure can be written as [109]
[
𝐙𝑅,𝑖𝑖 𝐙𝑅,𝑖𝑓 0
𝐙𝑅,𝑓𝑖 (𝐙𝑅,𝑓𝑓 + 𝐙𝐹,𝑓𝑓) −𝐙𝐹,𝑓𝑖0 −𝐙𝐹,𝑖𝑓 𝐙𝐹,𝑖𝑖
] {
𝐝𝑅,𝑖𝐝𝑅,𝑓𝐝𝐹,𝑖
} = {𝐟𝑢00
} (8.1)
where Z, d and fu are the dynamic stiffness matrix, displacement and unbalance forces
respectively, and the subscripts 𝐹, 𝑅, 𝑖 and 𝑓 denote the foundation, rotor, internal
degrees of freedom and connection degrees of freedom respectively. In this method, the
dynamic stiffness matrix of each element is reduced from 8 by 8 to 4 by 4 related to
degrees of freedom [𝑢𝑘, 𝑣𝑘 , 𝜃𝑘 , Ψ𝑘, 𝑢𝑙 , 𝑣𝑙 , 𝜃𝑙 , Ψ𝑙]T to [𝑟𝑘, Ψ𝑟𝑘, 𝑟𝑙, Ψ𝑟𝑙]
T respectively.
Therefore, the total size of the dynamic stiffness matrix of the system is reduced by half.
As a result, the time and computational effort in the signal processing will reduce
significantly. The unbalance forces are assumed to be applied only at the rotor internal
degrees of freedom. It is also assumed that the bearings are rigid connections between
the rotor and foundation. The foundation at bearings locations can be modelled by using
the degrees of freedom of the rotor only; hence the foundation internal degrees of
freedom are eliminated. Therefore, Equation (8.1) is reduced to
[𝐙𝑅,𝑖𝑖 𝐙𝑅,𝑖𝑓
𝐙𝑅,𝑓𝑖 (𝐙𝑅,𝑓𝑓 + 𝐙𝐹,𝑓𝑓)] {𝐝𝑅,𝑖𝐝𝑅,𝑓
} = {𝐟𝑢0} (8.2)
Equation (8.2) may be expressed as:
[𝐙𝑅,𝑖𝑖]{𝐝𝑅,𝑖} + [𝐙𝑅,𝑖𝑓]{𝐝𝑅,𝑓} = {𝐟𝑢} (8.3)
and
[𝐙𝑅,𝑓𝑖]{𝐝𝑅,𝑖} + [(𝐙𝑅,𝑓𝑓 + 𝐙𝐹,𝑓𝑓)]{𝐝𝑅,𝑓} = {0} (8.4)

CHAPTER 8 MATHEMATICAL MODEL-BASED ROTOR UNBALANCE…
181
Equation (8.3) can be rearranged as:
{𝐝𝑅,𝑖} = [𝐙𝑅,𝑖𝑖]−1[{𝐟𝑢} − [𝐙𝑅,𝑖𝑓]{𝐝𝑅,𝑓}] (8.5)
The unknown response can be eliminated by substituting Equation (8.5) into Equation
(8.4) as follows
[𝐙𝑅,𝑓𝑖][𝐙𝑅,𝑖𝑖]−1[{𝐟𝑢} − [𝐙𝑅,𝑖𝑓]{𝐝𝑅,𝑓}] + [(𝐙𝑅,𝑓𝑓 + 𝐙𝐹,𝑓𝑓)]{𝐝𝑅,𝑓} = {0} (8.6)
It is assumed that a reasonably accurate model for the rotor is available and the response
is measured. Thus, the foundation model and unbalance forces are the only unknowns in
Equation (8.6).
By inspecting Figure 8.4, it can be figured out that (𝑥, 𝑦) coordinates of a point P can be
written in terms of (𝑥′, 𝑦′) as follows
𝑥 = 𝑥′𝑐𝑜𝑠(𝛽) − 𝑦′𝑠𝑖𝑛(𝛽)
𝑦 = 𝑥′𝑠𝑖𝑛(𝛽) + 𝑦′𝑐𝑜𝑠(𝛽)
In matrix form,
[𝑥𝑦] = [
cos(𝛽) −sin(𝛽)
sin (𝛽) cos (𝛽)] [𝑥′
𝑦′]
Hence,
[𝑥′
𝑦′] = [
cos(𝛽) sin(𝛽)
−sin (𝛽) cos (𝛽)] [𝑥𝑦]
Figure 8.4 Coordinates of a point in two systems
P
𝑥′𝑠𝑖𝑛𝛽 𝑥
𝑥′
𝑦 𝑦′
𝛽
𝛽
𝑥′𝑐𝑜𝑠𝛽
𝑦′𝑠𝑖𝑛𝛽
𝑦′𝑐𝑜𝑠𝛽

CHAPTER 8 MATHEMATICAL MODEL-BASED ROTOR UNBALANCE…
182
Therefore, to get the radial response, the vertical and horizontal responses at each
bearing are multiplied by the following transformation matrix
𝐓𝑟 = [cos(45) sin(45)−sin (45) cos (45)
] (8.7)
8.3.2 Parameter estimation
The unbalance planes are assumed to be positioned at nodes 𝑛1, 𝑛2, … , 𝑛𝑝 where 𝑝 is the
number of planes. The amplitude of unbalance may be defined as
𝑢𝑛𝑖 = 𝑚𝑢𝑖𝑒𝑖 (8.8)
where 𝑚𝑢𝑖 is the unbalance mass at plane 𝑖, and 𝑒 is the eccentric radius of the
unbalance mass. In terms of matrices, the amplitude of unbalance and the phase angles
associated to the unbalance planes can be written as [𝑢𝑛1 , 𝑢𝑛2 , 𝑢𝑛3 , … , 𝑢𝑛𝑝]T
and
[α𝑛1 , α𝑛2 , α𝑛3 , … , α𝑛𝑝]T
respectively. Therefore, the complex quantity of the rotor
unbalance may be expressed as
𝑢𝑛𝑖 exp(jα𝑛𝑖) = 𝑎𝑛𝑖 + j𝑏𝑛𝑖 (8.9)
where 𝑎𝑛𝑖 and 𝑏𝑛𝑖 can be defined as
𝑎𝑛𝑖 = 𝑚𝑖 𝑒𝑖 cos(α) and 𝑏𝑛𝑖 = 𝑚𝑖 𝑒𝑖 cos (α +𝜋
2) = 𝑚𝑖 𝑒𝑖 sin(α) (8.10)
Hence, the unbalance forces can be written as
𝐟𝑢 = 𝜔2
{
0⋮0
𝑚1 𝑒1(𝑐𝑜𝑠(α1) + 𝑗 𝑠𝑖𝑛(α1))0⋮0
𝑚𝑝 𝑒𝑝(𝑐𝑜𝑠(α𝑝) + 𝑗 𝑠𝑖𝑛(α𝑝))
0⋮0 }
= 𝜔2
{
0⋮0
𝑎𝑛1 + 𝑗𝑏𝑛10⋮0
𝑎𝑛𝑝 + 𝑗𝑏𝑛𝑝0⋮0 }
(8.11)

CHAPTER 8 MATHEMATICAL MODEL-BASED ROTOR UNBALANCE…
183
where the locations in the unbalance force vector depend on the nodal locations of the
unbalance planes. Equation (8.11) may be further simplified as
𝐟𝑢 = 𝜔2𝐓𝐠 (8.12)
where 𝐠 = [𝑎𝑛1 𝑏𝑛1 𝑎𝑛2 𝑏𝑛2 ⋯ 𝑎𝑛𝑝 𝑏𝑛𝑝]T
and 𝐓 is the transformation matrix that is
defined such that Equations (8.11) and (8.12) are equivalent. Substituting Equation
(8.12) into Equation (8.6) gives:
[𝐙𝑅,𝑓𝑖𝐙𝑅,𝑖𝑖−1𝐙𝑅,𝑖𝑓 − 𝐙𝑅,𝑓𝑓]{𝐝𝑅,𝑓} − [𝐙𝐹,𝑓𝑓]{𝐝𝑅,𝑓} = 𝜔
2[𝐙𝑅,𝑓𝑖𝐙𝑅,𝑖𝑖−1𝐓]𝐠 (8.13)
In order to identify the rotor unbalance in a least-square sense, the foundation
parameters are grouped into vectors 𝐯𝒐, 𝐯𝟏 and 𝐯𝟐. Assume that the foundation dynamic
stiffness matrix (𝐙𝐹,𝑓𝑓) is written in terms of mass, damping and stiffness matrices. If
there are n measured degrees of freedom at the foundation-bearing interface,
then 𝐯𝒐, 𝐯𝟏 and 𝐯𝟐 may be written as
𝐯𝒐 = [𝑘𝐹,11 𝑘𝐹,12 … 𝑘𝐹,𝑛𝑛], 𝐯𝟏 = [𝑐𝐹,11 𝑐𝐹,12 … 𝑐𝐹,𝑛𝑛], 𝐯𝟐 = [𝑚𝐹,11 𝑚𝐹,12 … 𝑚𝐹,𝑛𝑛] (8.14)
𝐯𝒐, 𝐯𝟏 and 𝐯𝟐 can be collected in one matrix as follows
𝐯 = [𝐯𝒐 𝐯𝟏 𝐯𝟐]T (8.15)
With this definition of 𝐯, there is a linear transformation such that
[𝐙𝐹,𝑓𝑓]{𝐝𝑅,𝑓} = [W]{𝐯} (8.16)
where W contains the measured response terms at each frequency. For the 𝑁𝑡ℎ measured
frequency
W(𝜔𝑁) = [W𝑜(𝜔𝑁) W1(𝜔𝑁) W2(𝜔𝑁)]T (8.17)
If all elements of the foundation mass, damping and stiffness matrices are identified,
then

CHAPTER 8 MATHEMATICAL MODEL-BASED ROTOR UNBALANCE…
184
W𝑘(𝜔𝑁) = (𝑗𝜔𝑁)𝑘
[ d𝑅𝑓,1(𝜔𝑁) ⋯ d𝑅𝑓,𝑛(𝜔𝑁) 0 ⋯ 0 ⋯ 0 ⋯ 0
0 ⋯ 0 d𝑅𝑓,1(𝜔𝑁) ⋯ d𝑅𝑓,𝑛(𝜔𝑁) 0 ⋮ ⋯ ⋮
⋮ ⋮ ⋱ 0 00 0 0 0 ⋯ 0 0 d𝑅𝑓,1(𝜔𝑁) ⋯ d𝑅𝑓,𝑛(𝜔𝑁)]
(8.18)
where 𝑘 = 0, 1, 2. Equation (8.13), then, becomes
[𝐙𝑅,𝑓𝑖𝐙𝑅,𝑖𝑖−1𝐙𝑅,𝑖𝑓 − 𝐙𝑅,𝑓𝑓]{𝐝𝑅,𝑓} − [W]{v} = 𝜔
2[𝐙𝑅,𝑓𝑖𝐙𝑅,𝑖𝑖−1𝐓]𝐠 (8.19)
Let
R(𝜔𝑁) = 𝜔𝑁2 [𝐙𝑅,𝑓𝑖𝐙𝑅,𝑖𝑖
−1 𝐓] (8.20)
and
H(𝜔𝑁) = [𝐙𝑅,𝑓𝑖𝐙𝑅,𝑖𝑖−1𝐙𝑅,𝑖𝑓 − 𝐙𝑅,𝑓𝑓]{𝐝𝑅,𝑓} (8.21)
hence, Equation (8.19) becomes
H(𝜔𝑁) − [W(𝜔𝑁)]{v} = [R(𝜔𝑁)]{𝐠} 𝑦𝑖𝑒𝑙𝑑𝑠→ [W(𝜔𝑁)]{v} + [R(𝜔𝑁)]{𝐠} = H(𝜔𝑁) (8.22)
Equation (8.22) may be rewritten as
[W(𝜔𝑁) R(𝜔𝑁)] {v𝐠} = [H(𝜔𝑁)] (8.23)
Suppose that the response is measured for frequencies starting from 1 to 𝑞 Hz. All
measurements are used at ones, and one estimation of the rotor unbalance is produced.
Thus, Equation (8.23) is repeated 𝑞 times to give
[ W0(𝜔1) W1(𝜔1) W2(𝜔1) R(𝜔1)
W0(𝜔2) W1(𝜔2) W2(𝜔2) R(𝜔2)⋮ ⋮ ⋮ ⋮
W0(𝜔𝑞) W1(𝜔𝑞) W2(𝜔𝑞) R(𝜔𝑞)] {𝐯𝐠} =
[ H(𝜔1)
H(𝜔2)⋮
H(𝜔𝑞)] (8.24)
Equation (8.23) is a least square problem where the number of equations is more than
the number of unknowns. Therefore, to obtain the rotor unbalance, Equation (8.23) may
be rewritten as

CHAPTER 8 MATHEMATICAL MODEL-BASED ROTOR UNBALANCE…
185
{v𝐠} = [W(𝜔𝑞) R(𝜔𝑞)]
+H(𝜔𝑞) (8.25)
where [W(𝜔𝑞) R(𝜔𝑞)]+
is the Moore-Penrose pseudo-inverse of [W(𝜔𝑞) R(𝜔𝑞)], and
can be written as
[W(𝜔𝑞) R(𝜔𝑞)]+= [[W(𝜔𝑞) R(𝜔𝑞)]
T[W(𝜔𝑞) R(𝜔𝑞)]]
−1
[W(𝜔𝑞) R(𝜔𝑞)]T (8.26)
Although Equation (8.23) may be solved in a least-squares sense directly as shown in
Equation (8.25), it is not computationally efficient to invert the normal equations
matrix. Therefore, the solution via the singular-value decomposition (SVD) or QR-
decomposition approaches is more numerically stable.
The condition number of the inverse problem (i.e. Equation (8.23)) is relatively large,
which implies that any small perturbation in the input may result in significant errors in
the output data. Therefore, in order to solve this ill-conditioned problem, column scaling
regularisation is applied.
Simulated example 8.4
The proposed method was applied to a numerically simulated machine, where a flexible
rotor was mounted on two bearings fitted on a flexible foundation. The bearings were
assumed to be rigid joints between the rotor and foundation. The rotor in this example
consists of one steel shaft of 600mm long, with a nominal diameter of 20mm. Balancing
disc with a diameter of 125mm and thickness of 10mm was located at 100mm away
from the centre.TheYoung’smodulus anddensityof the rotor anddiscmaterial are
200 GPa and 7850 kg/m3 respectively. The rotor was created with 23 two-noded
Timoshenko beam elements, as shown in Figure 8.3, where each node has 2 degrees of
freedom. The torsional and axial vibrations were assumed to be negligible.
Results and discussion 8.5
The estimation process was done through two steps. First, Equation (8.2) was used to
calculate response at the normal directions of the two bearings using assumed
foundation model and a given rotor unbalance. The response vector was ordered as

CHAPTER 8 MATHEMATICAL MODEL-BASED ROTOR UNBALANCE…
186
𝐝𝑅,𝑓 = [𝑢𝑏1 𝑣𝑏1 𝑢𝑏2 𝑣𝑏2]T (8.27)
where the subscript b denotes the bearings. Then, the responses in 𝑟𝑘1 and 𝑟𝑘2 directions
were calculated by multiplying the responses in the normal directions by Equation (8.7).
The foundation mass and damping matrices were considered as
M𝐹 = diag [5 5 5 5] kg , C𝐹 = diag [150 150 150 150] N 𝑠𝑚⁄ (8.28)
At each unbalance configuration, three different stiffness combinations were used. First,
the horizontal and vertical stiffnesses were assumed to be identical. Then, the horizontal
stiffness was reduced to 80% and 50% of the vertical stiffness. The different unbalance
and foundation stiffness configurations are listed in Table 8.1. The numerically
modelled machine was run-up from 1 to 400 Hz with measurements taken at a spacing
of 0.5 Hz. The parameter estimation process was done four times where every time the
response of one of the four directions (i.e. vertical, horizontal, radial vertical and radial
horizontal) was assumed as the only measured response. The results of the different
directions are presented in the next three subsections.
Table 8.1 The unbalance and foundation stiffness configurations for the simulated examples
Configuration
no.
Run
no.
Foundation stiffness Unbalance
(Kg.m)
Phase (deg.)
w.r.t horizontal
direction V (MN/m) H (MN/m)
1
1
10.00
10.00
3.20e-04 30.00 2 8.00
3 5.00
2
4
10.00
10.00
7.20e-04 105.00 5 8.00
6 5.00
3
7
10.00
10.00
9.00e-04 220.00 8 8.00
9 5.00
4
10
10.00
10.00
1.80e-03 320.00 11 8.00
12 5.00
8.5.1 Vertical response only
Only the vertical vibration response of the two bearings was assumed as the measured
response and used to estimate the foundation model and the amplitude and phase of the

CHAPTER 8 MATHEMATICAL MODEL-BASED ROTOR UNBALANCE…
187
rotor unbalance. The estimated rotor unbalances for the different runs are listed in
Table 8.2. It can be seen that the maximum error in the identified unbalances is less than
1%, which indicates that the estimated unbalances are reasonably accurate. As can be
seen in Table 8.2, when the measurements from the vertical direction were used in the
unbalance estimation, the estimated phase angles were found to be 90 degrees more than
the actual ones. This is due to the fact that the actual phase angles have been measured
with respect to the horizontal axis (Figure 8.5).
Figure 8.5 Phase angles with respect to vertical and horizontal axes in cases of (a) response taken at
normal directions and (b) response taken at radial directions
8.5.2 Horizontal response only
The horizontal response was assumed as the measured response, and the estimation
process was done again. When the horizontal and vertical stiffnesses are identical, the
unbalance that was estimated using the response from the horizontal direction is same as
the vertical direction. However, when the horizontal and vertical stiffnesses are
different, the estimated rotor unbalance is not same. The identified rotor unbalances for
the 12 runs are presented in Table 8.2.
𝒙
𝒚
𝒖
𝒗
𝛂+ 𝟒𝟓°
𝛂 + 𝟏𝟑𝟓°
unbalance 𝒙
𝒚
𝒖
𝒗
𝛂
𝛂+ 𝟗𝟎°
unbalance (a) (b)

CHAPTER 8 MATHEMATICAL MODEL-BASED ROTOR UNBALANCE…
188
Table 8.2 The estimated unbalance for the simulated examples using vertical and horizontal
directions separately
Ru
n n
o.
Vertical direction only Horizontal direction only
Un
ba
lan
ce
(kg
.m)
Un
ba
lan
ce
error (%
)
Ph
ase
(deg
.)
Angle
w.r.t
horizont
al
(phase-
90)
Ph
ase
error
(%)
Un
ba
lan
ce
(kg
.m)
Un
ba
lan
ce
error (%
)
Ph
ase
(deg
.)
Ph
ase
error
(%)
1 3.1781e-04 0.6833 120 30.00 0 3.1781e-04 0.6833 30 0
2 3.1781e-04 0.6833 120 30.00 0 3.1941e-04 0.1834 30 0
3 3.1781e-04 0.6833 120 30.00 0 3.1952e-04 0.1499 30 0
4 7.1509e-04 0.6824 195 105.00 0 7.1509e-04 0.6824 105 0
5 7.1509e-04 0.6824 195 105.00 0 7.1866e-04 0.1859 105 0
6 7.1509e-04 0.6824 195 105.00 0 7.1889e-04 0.1544 105 0
7 8.9387e-04 0.6807 310 220.00 0 8.9387e-04 0.6807 220 0
8 8.9387e-04 0.6807 310 220.00 0 8.9831e-04 0.1881 220 0
9 8.9387e-04 0.6807 310 220.00 0 8.9861e-04 0.1546 220 0
10 0.0017382 0.6767 50 320.00 0 0.0017 0.6767 320 0
11 0.0017382 0.6767 50 320.00 0 0.001747 0.1958 320 0
12 0.0017382 0.6767 50 320.00 0 0.0017471 0.1632 320 0
8.5.3 Radial responses only
The rotor unbalance and foundation model were, first, estimated using the measured
vibration response from the first radial direction 𝑟𝑘1 only. Then, the estimation process
was repeated using responses from the second radial direction 𝑟𝑘2 only. The results of
the different runs for both cases are shown Table 8.3. The rotor response may be
estimated using the identified parameters from either 𝑟𝑘1 or 𝑟𝑘2 directions. This is
because the estimated parameters which were calculated using responses from either 𝑟𝑘1
or 𝑟𝑘2 directions include a significant content of vibration behaviour from the vertical
and horizontal directions. A comparison between the actual and estimated responses is
shown in Figures 8.6 and 8.7. By looking at these two figures, it can be said that the
estimated foundation model is of a good quality.

189
CH
AP
TE
R 8
MA
TH
EM
AT
ICA
L M
OD
EL
-BA
SE
D R
OT
OR
UN
BA
LA
NC
E…
Table 8.3 The estimated unbalance for the simulated examples using 𝒓𝒌𝟏 and 𝒓𝒌𝟐 directions separately
Ru
n n
o.
𝒓𝒌𝟏 direction only 𝒓𝒌𝟐 direction only
Un
bala
nce
(Kg.m
)
Un
bala
nce
error (%
)
Ph
ase
(deg
.)
Angle w.r.t
horizontal
(phase-135)
Ph
ase
error
(%)
Un
bala
nce
(Kg.m
)
Un
bala
nce
error (%
)
Ph
ase
(deg
.)
Angle w.r.t
horizontal
(phase-45)
Ph
ase
error
(%)
1 3.1785e-04 0.6724 75 30 0 3.1785e-04 0.6724 165 30 0
2 3.1888e-04 0.3492 75 30 0 3.1769e-04 0.7220 165 30 0
3 3.1869e-04 0.4081 75 30 0 3.1733e-04 0.8331 165 30 0
4 7.1515e-04 0.6733 150 105 0 7.1515e-04 0.6733 240 105 0
5 7.1755e-04 0.3406 150 105 0 7.1475e-04 0.7294 240 105 0
6 7.1712e-04 0.4007 150 105 0 7.1393e-04 0.8426 240 105 0
7 8.9392e-04 0.6751 265 220 0 8.9392e-04 0.6751 355 220 0
8 8.9683e-04 0.3518 265 220 0 8.9355e-04 0.7167 355 220 0
9 8.9632e-04 0.4094 265 220 0 8.9255e-04 0.8274 355 220 0
10 0.001738 0.6790 5 320 0 0.001738 0.6790 95 320 0
11 0.0017438 0.3503 5 320 0 0.0017375 0.7141 95 320 0
12 0.001743 0.4069 5 320 0 0.001736 0.8253 95 320 0

CHAPTER 8 MATHEMATICAL MODEL-BASED ROTOR UNBALANCE…
190
Figure 8.6 Comparison between the actual and estimated responses at (a) bearing 1 𝒓𝒌𝟏 and (b)
bearing 2 𝒓𝒌𝟏, for run number 5: , actual ; , estimated
(b)
(a)

CHAPTER 8 MATHEMATICAL MODEL-BASED ROTOR UNBALANCE…
191
Figure 8.7 Comparison between the actual and estimated responses at (a) bearing 1 𝒓𝒌𝟐 and (b)
bearing 2 𝒓𝒌𝟐, for run number 5: , actual; , estimated
Conclusion 8.6
This paper has presented a simplified and computationally efficient method for
identifying and quantifying the state of rotor unbalance and foundation model in
rotating machines using measured vibration response at a single machine transient
operation with a single vibration sensor per bearing location. The vibration sensors have
been located in the radial direction (i.e. 45 degree to both lateral and vertical directions)
in order to include the effect of the vertical and horizontal directions. Numerical
simulation has been done on a rotor-bearing-foundation system with different unbalance
and stiffness configurations. Vibration measurements have been collected during a
(b)
(a)

CHAPTER 8 MATHEMATICAL MODEL-BASED ROTOR UNBALANCE…
192
single coast-up and used in the parameter estimation process. The estimated rotor
unbalance and foundation model of the different configurations were close to the actual
ones, which indicates the potentials of the proposed technique for practical applications.

CHAPTER 9 MULTI-PLANES ROTOR UNBALANCE IDENTIFICATION…
193
CHAPTER 9
MULTI-PLANES ROTOR UNBALANCE
IDENTIFICATION USING DATA FROM A
SINGLE MACHINE RUN-UP WITH
REDUCED NUMBER OF SENSORS

CHAPTER 9 MULTI-PLANES ROTOR UNBALANCE IDENTIFICATION…
194
This chapter is a reformatted version of the following paper:
Title: Estimating rotor unbalance from a single run-up and using reduced sensors
Authors: Sami M. Ibn Shamsah, Jyoti K. Sinha and Parthasarathi Mandal
Status: Submitted to Journal of Sound and Vibration
Abstract: The earlier model-based rotor mass unbalance estimation methods have used two
orthogonal sensors per bearing pedestal. It is generally believed that the vibration
measurement at two orthogonal directions provides the bigger picture of machine dynamical
behaviour. However, in the present study, the concept of the earlier method is applied again
but with using only one sensor at a bearing pedestal, rather than the usual pair of sensors
arranged in orthogonal directions. The significant reduction in the number of vibration
sensors without necessarily compromising the valuable information required for the diagnosis
could be of great benefit to industries that have huge rotating machines with numerous
bearings. The reason is that the computational effort in the complex signal processing will
reduce considerably and hence the downtime of the rotating machine will reduce
significantly. The concept is applied to experimental rigs with a single as well as multiple
balancing planes and supported on either side through a stiff ball bearing on a somewhat
flexible foundation. The paper presents the experimental apparatus, unbalance estimation and
comparison of several unbalance estimations of various scenarios. The results indicate the
potentials of the proposed technique for practical applications.
Keywords: Rotor unbalance, vibration monitoring, fault diagnosis, rotating machinery

CHAPTER 9 MULTI-PLANES ROTOR UNBALANCE IDENTIFICATION…
195
Introduction 9.1
Rotating machines, such as turbogenerator set, are essential components in power generation
and industrial applications. Therefore, their reliability and availability are in high demand.
The typical industrial rotating machine consists of three main elements: the rotor, the
bearings and the foundation. There are several faults that often occur to the rotors, and hence
impede the rotating machines from achieving their anticipated reliability targets [17, 78, 167,
168]. Since this class of machines plays a crucial role in the achievement of most industrial
objectives, it is therefore necessary to continuously seek for approaches that simplify as well
as improve the detection and diagnosis of rotating machine malfunctions at their early stages.
The rotor mass unbalance, which occurs when the centre of mass of the rotor is not aligned
with the centre of rotation, is one of the most common malfunctions that cause the whole
machine to vibrate [169]. If the amount of rotor mass unbalance exceeds a pre-set limit, it
may cause unexpected machine failure. Hence, costly machine repairs and unplanned plant
downtime are required. Therefore, the regular balancing of rotating machines is necessary to
guarantee safe and smooth running as well as long service life of the machines.
Many approaches for the identification of unbalance rely on vibration signals as machine
vibrations change in different ways under different fault conditions. A number of vibration-
based rotor balancing methods have been proposed in the last few decades [51, 95, 99, 106,
170]. Recently, some researchers have successfully identified and diagnosed rotor mass
unbalance using methods that rely on an accurate numerical model of the machine as well as
measured vibration response from a single machine run-down [26, 127]. The finite element
(FE) method has been found to be the most appropriate tool for the numerical modelling in
structural engineering today [27]. Often, an accurate mathematical model of the rotor and
approximate model of the bearings can be constructed using the FE method [21].
Lees et al. [102] gave an overview of the research on the model-based rotor unbalance
identification approach. Lees and Friswell [123] have presented a technique for identifying
the amplitude of rotor unbalance using machine vibration measurements from a single
machine’s transient operation (i.e. run-down) of a simulated rotating machine. Their method
requires an accurate numerical model of the rotor and approximate model of the bearings. No

CHAPTER 9 MULTI-PLANES ROTOR UNBALANCE IDENTIFICATION…
196
attempts for the estimation of the phase have been made as it relies strongly on the quality of
the mathematical model of the bearings.
Later, Edwards et al. [124] as well as Lees et al. [125] have gone one step forward by
identifying both the machine supporting structure parameters as well as the phase and
amplitude of rotor mass unbalance. The results have been verified experimentally on a test rig
by using the vibration data from a single machine run-down. Sinha et al. [25] have proposed
a method that estimates both rotor unbalance and foundation model of a rotor-bearing-
foundation system. The method is similar in concept to Edwards et al. [124]. This approach
has provided a very good estimation of both state of rotor unbalance as well as foundation
model.
In the present study, the concept of the earlier model-based balancing method is enhanced by
reducing number of sensors (accelerometers). Instead of using a pair of sensors arranged in
orthogonal directions, only one sensor is used at a bearing pedestal. The significant reduction
in the number of sensors is of great benefit when it comes to the huge industrial rotating
machines as the computational effort in the complex signal processing will reduce
considerably; and hence the machine downtime will reduce significantly. Also, the significant
reduction in the number of sensors will considerably reduce the possibility of tripping the
machine because of false signal from faulty vibration sensor. The concept is applied to
experimental rigs with single/multiple balancing planes and supported on either side through
a stiff ball bearing on a somewhat flexible foundation. The paper presents the experimental
apparatus, unbalance estimation and comparison of several unbalance estimations of various
scenarios.
Earlier method 9.2
In the construction of typical rotating machinery, the rotor, journal bearings and foundation
are often considered as the principal components, where the rotor is connected to the
foundation through the bearings. The motion equation of such structure can be written [25] as
[
𝐙𝑅,𝑖𝑖 𝐙𝑅,𝑖𝑏 0
𝐙𝑅,𝑏𝑖 𝐙𝑅,𝑏𝑏 + 𝐙𝐵 −𝐙𝐵0 −𝐙𝐵 𝐙𝐵 + �̅�𝐹
] {
𝐝𝑅,𝑖𝐝𝑅,𝑏𝐝𝐹,𝑏
} = {𝐟𝑢00
} (9.1)

CHAPTER 9 MULTI-PLANES ROTOR UNBALANCE IDENTIFICATION…
197
where 𝐙 is the dynamic stiffness matrix. The frequency-dependent dynamic stiffness matrix
may be written as 𝐙(ω) = −ω2𝐌+ jω𝐂 + 𝐊, where ω is the rotational speed in rad/sec, and
𝐌, 𝐂 and 𝐊 are the mass, damping and stiffness matrices of the structural system. In case of
modelling rotor with large shaft diameter, gyroscopic effects should be added to the dynamic
stiffness matrix. However, gyroscopic effects are generally small and can be ignored when
modelling shaft with small diameter [21]. 𝐙𝐵, 𝐝 and 𝐟𝑢 in Equation (9.1) are the dynamic
stiffness matrix of the bearings, displacement vector and unbalance forces respectively. The
unbalance forces are assumed to be applied only at rotor internal degrees of freedom. The
subscripts 𝐹, 𝑅, 𝐵, 𝑖 and 𝑏 in Equation (9.1) denote the foundation, the rotor, the bearings,
the internal degrees of freedom and the bearing (connection) degrees of freedom,
respectively. Due to the fact that the vibration response can be measured only at the bearing-
foundation interface and not in the internal degrees of freedom of the foundation, the internal
foundation degrees of freedom have been eliminated. Therefore, only a reduced order model
of the foundation, �̅�𝐹, can be estimated [109, 171]. In the model of the earlier method, each
element consists of 8 degrees of freedom (4 translational and 4 rotational), i.e.
[𝑢𝑘, 𝑣𝑘, 𝜃𝑘 , Ψ𝑘 , 𝑢𝑙 , 𝑣𝑙 , 𝜃𝑙 , Ψ𝑙]T, as shown in Figure 9.1.
Figure 9.1 A rotor element with degrees of freedom (a) horizontal plane, (b) vertical plane, (c)
combination of horizontal, vertical and radial planes
𝒛
𝒚
(a) (b)
𝚿𝒌 𝛉𝒌
𝒖𝒌 𝒖𝒍
𝚿𝒍
𝒗𝒌 𝒗𝒍 𝛉𝒍
𝒛
𝒙
(c) O
𝒛
𝒚
𝒖𝒍
𝒙
𝟒𝟓∘
𝒖𝒌
𝚿𝒌 𝒗𝒌 𝒓𝒌
𝛉𝒌 𝚿𝒓𝒌 𝒗𝒍
𝛉𝒍
𝒓𝒍 𝚿𝒍
𝚿𝒓𝒍

CHAPTER 9 MULTI-PLANES ROTOR UNBALANCE IDENTIFICATION…
198
The first two rows of Equation (9.1) are used to eliminate the non-measured degrees of
freedom of the rotor (i.e. 𝐝𝑅,𝑖 and 𝐝𝑅,𝑏) as shown in Equation (9.2)
�̅�𝐹𝐝𝐹,𝑏 = 𝐙𝐵(𝑃−1𝐙𝐵 − 𝐼)𝐝𝐹,𝑏 − 𝐙𝐵𝑃
−1𝐙𝑅,𝑏𝑖𝐙𝑅,𝑖𝑖−1 𝐟𝑢 (9.2)
where 𝑃 = 𝐙𝑅,𝑏𝑏 + 𝐙𝐵 − 𝐙𝑅,𝑏𝑖𝐙𝑅,𝑖𝑖−1 𝐙𝑅,𝑖𝑏. It is assumed that reasonably accurate numerical
models of the rotor 𝐙𝑅 and bearings 𝐙𝐵 are available, and the vibration response at bearing
pedestals 𝐝𝐹,𝑏 is measured. Hence, the only unknowns in Equation (9.2) are the unbalance
forces 𝐟𝑢 and the reduced foundation model �̅�𝐹. If the bearing pedestals are assumed to be
positioned at nodes 𝑛1 to 𝑛b, then the measured displacement at the bearing-foundation
interface at the N𝑡ℎ rotor speed can be written as
𝐝𝐹,𝑏(ω𝑁) = [𝒗𝑛1(ω𝑁) 𝒖𝑛1(ω𝑁) … 𝒗𝑛b(ω𝑁) 𝒖𝑛b(ω𝑁)]T (9.3)
where 𝒗𝑛b and 𝒖𝑛b are the displacements at the bth bearing pedestal in the vertical and
horizontal directions respectively (Figure 9.2).

CHAPTER 9 MULTI-PLANES ROTOR UNBALANCE IDENTIFICATION…
199
Figure 9.2 (a) A simple schematic representation of the rig, (b) vibration measurement directions of
bearing pedestal at node 𝒌
As a matter of fact, the unbalance in rotating machines is in continuous form. This is similar
to a discrete form of unbalance, on condition that the number of balancing planes is same as
the number of active modes [171]. It is a difficult task to find an exact unbalance distribution
using the existing approaches [162]. Instead, the unbalance planes are assumed to be
positioned at nodes 𝑢𝑛1 , 𝑢𝑛2 , 𝑢𝑛3 , … , 𝑢𝑛𝑝, where the subscript 𝑝 denotes the number of
balancing planes. This is demonstrated in Figure 9.3.
𝒛
𝒙
𝒚
Front view Side view of 𝑭𝐛𝟐
𝒙
𝑭𝒃𝟐𝒚
𝑭𝒃𝟐𝒙
𝒛
(b)
Bearing front view Bearing side view
𝒖𝒌
𝒗𝒌 𝒓𝒌
𝟒𝟓°
(a)
𝑭𝒃𝟐𝒓
𝒚 𝒚
𝑭𝐛𝟐
A
A 𝑭𝐛𝟏
𝒛 𝒙
𝟒𝟓∘

CHAPTER 9 MULTI-PLANES ROTOR UNBALANCE IDENTIFICATION…
200
Figure 9.3 Typical rotor mass unbalance distribution along the rotor length; (a) continuous form of rotor
mass unbalance, (b) discretized form of rotor mass unbalance
The amplitude of unbalance, 𝑢, for the 𝑖th balancing plane may be defined as
𝑢𝑛𝑖 = 𝑚𝑢𝑖𝑒𝑖 (9.4)
where 𝑚𝑢𝑖 is the unbalance mass at plane 𝑖, and 𝑒 is the distance between the unbalance mass
and the geometric centre of the rotor. In terms of matrices, the amplitude of unbalance and
the phase angles associated to the unbalance planes can be written as [𝑢𝑛1 , 𝑢𝑛2 , 𝑢𝑛3 , … , 𝑢𝑛𝑝]T
and [α𝑛1 , α𝑛2 , α𝑛3 , … , α𝑛𝑝]T
respectively. Therefore, the complex quantity of the rotor
unbalance may be expressed as
𝑢𝑛𝑖 exp(jα𝑛𝑖) = 𝑎𝑛𝑖 + j𝑏𝑛𝑖 (9.5)
where j = √−1 , and 𝑎𝑛𝑖 and 𝑏𝑛𝑖 can be defined as
𝑎𝑛𝑖 = 𝑚𝑖 𝑒𝑖 cos(α) and 𝑏𝑛𝑖 = 𝑚𝑖 𝑒𝑖 cos (α +𝜋
2) = 𝑚𝑖 𝑒𝑖 sin(α) (9.6)
To get the unbalance in the horizontal direction, Equation (9.5) should be multiplied by −𝑗 as
follows
−𝑗(𝑢𝑛𝑖 exp(jα𝑛𝑖)) = −𝑗(𝑎𝑛𝑖 + j𝑏𝑛𝑖) = −𝑗𝑎𝑛𝑖 + 𝑏𝑛𝑖 (9.7)
𝑢(𝑥)
𝒚
𝒙
𝒛
𝑢𝑛1
𝒚
𝒙
𝒛
𝑢𝑛2 𝑢𝑛3
𝑢𝑛(𝑝−1) 𝑢𝑛𝑝
(a) (b)

CHAPTER 9 MULTI-PLANES ROTOR UNBALANCE IDENTIFICATION…
201
Hence, when using two measurements per bearing pedestal, the unbalance forces in the
vertical and horizontal directions can be written in a matrix form as shown in Equation (9.8),
below:
𝐟𝑢 = ω2
{
0⋮0
𝑚1 𝑒1(𝑐𝑜𝑠(α1) + 𝑗 𝑠𝑖𝑛(α1))
𝑚1 𝑒1(−𝑗cos(α1) + sin(α1))0⋮0
𝑚𝑝 𝑒𝑝(𝑐𝑜𝑠(α𝑝) + 𝑗 𝑠𝑖𝑛(α𝑝))
𝑚𝑝 𝑒𝑝(−𝑗cos(α𝑝) + sin(α𝑝))
0⋮0 }
= ω2
{
0⋮0
𝑎𝑛1 + 𝑗𝑏𝑛1−𝑗𝑎𝑛1 + 𝑏𝑛1
0⋮0
𝑎𝑛𝑝 + 𝑗𝑏𝑛𝑝−𝑗𝑎𝑛𝑝 + 𝑏𝑛𝑝
0⋮0 }
(9.8)
Equation (9.8) may be further simplified as
𝐟𝑢 = ω2𝐓𝐠 (9.9)
where 𝐠 = [𝑎𝑛1 𝑏𝑛1 𝑎𝑛2 𝑏𝑛2 ⋯ 𝑎𝑛𝑝 𝑏𝑛𝑝]T
and 𝐓 is the transformation matrix which is
defined such that Equations (9.8) and (9.9) are equivalent. Substituting Equation (9.9) into
Equation (9.2) gives
�̅�𝐹𝐝𝐹,𝑏 = 𝐙𝐵(𝑃−1𝐙𝐵 − 𝐼)𝐝𝐹,𝑏 −ω
2(𝐙𝐵𝑃−1𝐙𝑅,𝑏𝑖𝐙𝑅,𝑖𝑖
−1 𝐓)𝐠 (9.10)
To identify the rotor unbalance in a least-square sense, the foundation parameters are grouped
into vectors v0, v1 and v2. Assume that the dynamic stiffness matrix of the reduced model of
the foundation is written in terms of mass, damping and stiffness matrices. If there is a total
of 𝑡 measured degrees of freedom at the foundation-bearing interface, then v0, v1 and v2 can
be written as:
v0 = [�̅�𝐹,11 �̅�𝐹,12 … �̅�𝐹,𝑡𝑡], v1 = [𝑐�̅�,11 𝑐�̅�,12 … 𝑐�̅�,𝑡𝑡], v2 = [�̅�𝐹,11 �̅�𝐹,12 … �̅�𝐹,𝑡𝑡] (9.11)
v0, v1 and v2 can be collected in one matrix as shown in Equation (9.12)

CHAPTER 9 MULTI-PLANES ROTOR UNBALANCE IDENTIFICATION…
202
𝐯 = [v0 v1 v2]T (9.12)
With this definition of 𝐯, there is a linear transformation such that
[�̅�𝐹]{𝐝𝐹,𝑏} = [𝐖]{𝐯} (9.13)
where 𝐖 contains the measured response terms at each frequency. For the N𝑡ℎ measured
frequency
𝐖(ω𝑁) = [W0(ω𝑁) W1(ω𝑁) W2(ω𝑁)]T (9.14)
If all elements of the foundation’s mass, damping and stiffness matrices are identified, then
W𝑘(ω𝑁) = (𝑗ω𝑁)𝑘
[ 𝐝𝐹,𝑏T (ω𝑁) 0 … 0
0 𝐝𝐹,𝑏T (ω𝑁) 0
⋮ ⋮ ⋱ ⋮0 0 … 𝐝𝐹,𝑏
T (ω𝑁)]
(9.15)
where 𝑘 = 0, 1, 2. Hence, Equation (9.10) becomes
𝐙𝐵(𝑃−1𝐙𝐵 − 𝐼)𝐝𝐹,𝑏 = ω𝑁
2 (𝐙𝐵𝑃−1𝐙𝑅,𝑏𝑖𝐙𝑅,𝑖𝑖
−1 𝐓)𝐠 + [𝐖]{𝐯} (9.16)
Let
R(ω𝑁) = ω𝑁2 𝐙𝐵𝑃
−1(ω𝑁)𝐙𝑅,𝑏𝑖(ω𝑁)𝐙𝑅,𝑖𝑖−1 (ω𝑁)𝐓 (9.17)
and
H(ω𝑁) = 𝐙𝐵(ω𝑁) (𝑃−1(ω𝑁)𝐙𝐵(ω𝑁) − 𝐼)𝐝𝐹,𝑏(ω𝑁) (9.18)
Substitution of Equations (9.17) and (9.18) into Equation (9.16) gives:
[𝐖(ω𝑁)]{𝐯} + [R(ω𝑁)]{𝐠} = [H(ω𝑁)] (9.19)

CHAPTER 9 MULTI-PLANES ROTOR UNBALANCE IDENTIFICATION…
203
Equation (9.19) can be rearranged as shown in Equation (9.20)
[𝐖(ω𝑁) R(ω𝑁)] {𝐯𝐠} = [H(ω𝑁)] (9.20)
Suppose that the response is measured for frequencies starting from 1 to 𝑞 Hz. All
measurements are used at once, and one estimation of the rotor unbalance is produced. Thus,
Equation (9.20) is repeated 𝑞 times to give
[ W0(ω1) W1(ω1) W2(ω1) R(ω1)
W0(ω2) W1(ω2) W2(ω2) R(ω2)⋮ ⋮ ⋮ ⋮
W0(ω𝑞) W1(ω𝑞) W2(ω𝑞) R(ω𝑞)] {𝐯𝐠} =
[ H(ω1)
H(ω2)⋮
H(ω𝑞)] (9.21)
The system of equations in Equation (9.20) is overdetermined as the number of equations is
more than the number of unknowns. Therefore, a solution can be obtained by applying the
least-squares technique as shown in Equation (9.22)
{𝐯𝐠} = [𝐖 R]
+H (9.22)
where [𝐖 R]+ is the Moore-Penrose pseudo-inverse of [𝐖 R] [172] , and can be written as
[𝐖 R]+ = [[𝐖 R]T[𝐖 R]]−1[𝐖 R]T (9.23)
Although Equation (9.20) may be solved in a least-squares sense directly as shown in
Equation (9.22), it is not adequate when the condition number is large. Thus, more accurate
solution can be achieved by applying more numerically stable approaches such as the
singular-value decomposition (SVD) and QR factorization [173]. The large condition number
of the inverse problem (Equation (9.20)) implies that any small perturbation in the input may
result in significant errors in the output data. To solve the ill-conditioned problem, extra
conditions on the solution are needed to be imposed. Therefore, column scaling regularisation
is applied to make the problem well-conditioned [173].

CHAPTER 9 MULTI-PLANES ROTOR UNBALANCE IDENTIFICATION…
204
Proposed method 9.3
The current approach attempts to enhance the earlier model-based unbalance estimation
methods by investigating the feasibility of estimating the rotor unbalance using only one
vibration sensor at a bearing pedestal. Now, the measured responses at two orthogonal
directions are replaced by the measured response at one direction. Hence, Equation (9.3) can
be replaced by the following equation
𝐝𝐹,𝑏(ω𝑁) = [𝑟𝑛1(ω𝑁)… 𝑟𝑛b(ω𝑁)]
T (9.24)
In addition, Equation (9.8) is modified as shown in Equation (9.25), below:
𝐟𝑢 = ω2
{
0⋮0
𝑚1 𝑒1(𝑐𝑜𝑠(α1) + 𝑗 𝑠𝑖𝑛(α1))0⋮0
𝑚𝑝 𝑒𝑝(𝑐𝑜𝑠(α𝑝) + 𝑗 𝑠𝑖𝑛(α𝑝))
0⋮0 }
= ω2
{
0⋮0
𝑎𝑛1 + 𝑗𝑏𝑛10⋮0
𝑎𝑛𝑝 + 𝑗𝑏𝑛𝑝0⋮0 }
(9.25)
where the unbalance forces applied in Equation (9.25) are similar to the ones used in
Equation (9.8). The rest of the equations are applied again but with making the appropriate
modifications. Although the proposed approach can be applied using any unidirectional
measurements, it is preferred to use measurements at 45 degrees to the vertical/horizontal
directions (i.e. 𝑟𝑘 in Figure 9.2(b)) in the current study. The reason is that amongst all other
directions, the measurements at this direction are likely to have the most significant content
of vibration behaviour from both orthogonal directions. The bearings used in the current
study are stiff ball bearings (i.e. anti-friction bearings), hence their acceleration is regarded
equal to rotor acceleration (vibration). Therefore, they are assumed as direct connection
between the rotor and foundation in the FE model. The cross-coupling required for the
simulation of the gyroscopic effect is ignored, because the FE model of the rotor is
constructed with sensors mounted only in single plane. However, this may not impact the
rotor unbalance estimation for small and medium size rotating machines [21].

CHAPTER 9 MULTI-PLANES ROTOR UNBALANCE IDENTIFICATION…
205
Experimental rig with one balancing plane 9.4
The test apparatus displayed in Figure 9.4 is composed of a mild solid steel shaft (1000mm
length and 20mm diameter) flexibly coupled to a three-phase, 3000 RPM, 0.75kW electric
motor. A single balancing disc of 130mm diameter and 20mm thickness is assembled to the
shaft and positioned at the midspan between two bearings. The balancing disc includes
staggered M5 tapped holes in two different pitch diameters (i.e. 70 and 120mm). The angle
between two adjacent holes for a particular pitch diameter is 30°. The entire rotor assembly is
supported on relatively flexible supporting structure through two greased lubricated stiff ball
bearings. Each ball bearing is bolted to steel horizontal beam (530mm × 25mm × 3mm)
using two bolts and nuts. Each horizontal beam is secured atop two rectangular steel blocks
(107mm × 25mm × 25mm) that are fixed on a thick base plate (580mm × 150mm × 15mm).
A 12mm thick anti-vibration pad is placed beneath the base plate to mitigate noise and
vibration. Bearing near the motor is denoted as B1 and the other bearing as B2.

CHAPTER 9 MULTI-PLANES ROTOR UNBALANCE IDENTIFICATION…
206
Figure 9.4 Photographs of the test rig with one balancing disc
Modal tests 9.5
A modal test has been conducted on the test rig at zero RPM. Impulse-response method [17]
was used for the modal test. The test apparatus is artificially excited by using an instrumented
impact hammer that has a sensitivity of 1.1 mV/g. The response acceleration is measured by
7 Integrated Circuit Piezoelectric (ICP) accelerometers (sensitivity of 100 mV/g) which are
distributed along the rotor. Table 9.1 and Figure 9.5 show the experimentally identified
natural frequencies and a typical measured FRF plots respectively. The corresponding mode
shapes of the identified natural frequencies are presented in Figure 9.6.
Flexible coupling
𝒛
𝒚
𝟑𝟎°
Tachometer
𝒛
𝒚
𝒙
Shaft
Balancing disc
Motor
Bearing B2
Bearing B1
Safety guard Control panel
Horizontal
beam

CHAPTER 9 MULTI-PLANES ROTOR UNBALANCE IDENTIFICATION…
207
Table 9.1 Experimentally identified natural frequencies of test rig with one balancing disc at zero RPM
Mode Frequency (Hz)
1 17.09
2 29.91
3 31.13
4 58.59
Figure 9.5 Typical measured FRF plots of the rotor at distance of 42cm from bearing B1 in (a)
vertical, (b) horizontal directions
(a)
(b)

CHAPTER 9 MULTI-PLANES ROTOR UNBALANCE IDENTIFICATION…
208
Figure 9.6 Measured mode shapes of the rig, (a) mode 1, (b) mode 2, (c) mode 3 and (d) mode 4
(a)
(c)
(d)
(b)

CHAPTER 9 MULTI-PLANES ROTOR UNBALANCE IDENTIFICATION…
209
Experiments conducted 9.6
The test apparatus is coasted-up linearly from 0 to 3000 RPM (i.e. 0 to 50 Hz) and the
acceleration responses are measured by means of 3 accelerometers that are installed at the
vertical, horizontal and 45-degree to the vertical/horizontal directions of each bearing
pedestal. The arrangement of the accelerometers on the bearing housing is shown in
Figure 9.7. Figure 9.8 illustrates the unbalance and phase angle with respect to the laser tacho
sensor. A total number of 7 machine coast-ups are conducted (i.e. one with residual
unbalance and six with different added mass unbalances at a radius of 6cm). Table 9.2 lists
the added unbalances used in the different runs.
Figure 9.7 A typical accelerometer installation at a bearing in 3 directions
𝒙, horizontal
𝒚, vertical 𝒓, radial(𝟒𝟓°)

CHAPTER 9 MULTI-PLANES ROTOR UNBALANCE IDENTIFICATION…
210
Figure 9.8 Demonstration of the added unbalance (mass and phase angle)
Table 9.2 List of 7 machine runs with different added unbalances (mass and phase angles)
Run no. Added unbalance (𝐠𝐜𝐦@𝛉°)
run0 Residual unbalance 𝑒0
run1 3g × 6cm @ 30° = 18gcm @ 30° 𝑒0 + 𝑒1
run2 7g × 6cm @ 210° = 42gcm @ 210° 𝑒0 + 𝑒2
run3 5g × 6cm @ 270° = 30gcm @ 270° 𝑒0 + 𝑒3
run4 5g × 6cm @ 60° = 30gcm @ 60° 𝑒0 + 𝑒4
run5 3g × 6cm @ 60° = 18gcm @ 60° 𝑒0 + 𝑒5
run6 3g × 6cm @ 90° = 18gcm @ 90° 𝑒0 + 𝑒6
Owing to the fact that the rotor vibrations due to mass unbalance are synchronous to the
rotational speed, the measured vibration responses of each machine’s run-up were order
tracked to obtain the 1× (i.e. one multiplied by rotating frequency) vibration component
(both amplitudes and phases). Figure 9.9 shows the obtained critical speeds of the machine
(i.e. around 18 and 29 Hz). The order tracked 1× vibration components in the speed range
from 420 to 2820 RPM (i.e. 7 to 45 Hz) with a spacing of 60 RPM (1 Hz) were then used for
the unbalance estimation.
𝒙
𝒚
Tachometer Laser beam
Reflective tape
Steel shaft
Disc
Added unbalance
Phase angle

CHAPTER 9 MULTI-PLANES ROTOR UNBALANCE IDENTIFICATION…
211
Figure 9.9 Typical measured 1× displacement responses in vertical direction for the machine runs 4
and 5 at bearings (a) B1 and (b) B2
Unbalance estimation 9.7
In this section, the earlier and proposed model-based unbalance estimation approaches are
applied on the test rig described in Section 9.4. Then, a comparison between the results from
both methods is presented.
9.7.1 Part 1: application of the earlier method
For the purpose of estimating the actual added unbalance, the response of run0 is subtracted
from the response of each of the other runs as shown in Table 9.3. The measured acceleration
responses at the vertical and horizontal directions of each bearing pedestal for the entire run-
up speed range are used in Equation (9.21) to obtain the estimated unbalance. Table 9.4
shows a comparison between the estimated unbalance and the actual added unbalance for
each case.
1st critical speed
2nd
critical speed
(a)
(b)

CHAPTER 9 MULTI-PLANES ROTOR UNBALANCE IDENTIFICATION…
212
Table 9.3 Different scenarios used for the added unbalance estimation
Case no. Unbalance
Case I run1 − run0 𝑒1
Case II run2 − run0 𝑒2
Case III run3 − run0 𝑒3
Case IV run4 − run0 𝑒4
Case V run5 − run0 𝑒5
Case VI run6 − run0 𝑒6
Table 9.4 Estimated unbalance for the different scenarios using pair of orthogonal sensors (at vertical and
horizontal directions) at a bearing pedestal
Case
no.
Actual added
unbalance
Estimated
unbalance
Mass
% error
Phase
difference
Case I 3g @ 30° 3.29g @ 30.0750° 8.73 0.08°
Case II 7g @ 210° 6.08g @ 200.5° 15.19 9.5°
Case III 5g @ 270° 4.8g @ 282.77° 4.2 12.77°
Case IV 5g @ 60° 5.56g @ 50.26° 10.1 9.74°
Case V 3g @ 60° 3.17g @ 47.35° 5.24 12.65°
Case VI 3g @ 90° 2.65g @ 71.7° 13.34 18.3°
9.7.2 Part 2: application of the proposed method
The measured acceleration responses at only one direction (i.e. 45-degree direction) at a
bearing pedestal for the entire run-up speed range are used together in a single band in
Equation (9.21) to obtain the estimated unbalance. Same machine run-ups and unbalance
estimation scenarios used for earlier method (i.e. Table 9.3) are used for the proposed
method. Table 9.5 shows a comparison between the estimated unbalance and the actual added
unbalance for each case.

CHAPTER 9 MULTI-PLANES ROTOR UNBALANCE IDENTIFICATION…
213
Table 9.5 Estimated unbalance using only one sensor at a bearing pedestal (at radial direction)
Case
no.
Actual added
unbalance
Estimated
unbalance
Mass
% error
Phase
difference
Case I 3g @ 30° 3.15g @ 36.9° 4.7 6.9°
Case II 7g @ 210° 7.81g @ 203.23° 10.42 6.77°
Case III 5g @ 270° 6.32g @ 284.46° 20.9 14.46°
Case IV 5g @ 60° 5.49g @ 57.11° 8.89 2.89°
Case V 3g @ 60° 3.14g @ 63.2° 4.46 3.2°
Case VI 3g @ 90° 3.07g @ 91.09° 2.27 1.09°
9.7.3 Comparison between the earlier and proposed methods
It can be noticed from Tables 9.4 and 9.5 that the estimated unbalances (i.e. mass and phase
angle) for both earlier and proposed methods are close to the actual added unbalances. For the
sake of easy comparison, the results in Tables 9.4 and 9.5 are also presented in the form of
grouped bar chart in Figure 9.10. The estimation method was also applied to the radial
vertical and radial horizontal directions individually, and the results are shown in Figure 9.10.
As the unbalance estimation proposed in this paper mainly relies on the accuracy of the
numerical model of the rotor, the results of the estimated unbalance can be enhanced by
improving the accuracy of the mathematical model.

CHAPTER 9 MULTI-PLANES ROTOR UNBALANCE IDENTIFICATION…
214
Figure 9.10 Grouped bar chart of the comparison between actual and estimated unbalances by both the
earlier and proposed methods, (a) mass and (b) phase angle
Modified test rig with two balancing planes 9.8
Two modifications have been made to the experimental apparatus. The first modification is
that a second balancing disc which has similar dimensions as the first one is attached to the
shaft. The disc closer to bearing B1 is symbolised as D1 and the other disc as D2. Discs D1
and D2 are positioned at distances of 240mm and 665mm from bearing B1, respectively. The
(a)
(b)

CHAPTER 9 MULTI-PLANES ROTOR UNBALANCE IDENTIFICATION…
215
second modification is replacing the horizontal steel beams with thicker ones (530mm ×
25mm × 8mm). Figure 9.11 displays the modified test rig.
Figure 9.11 Photograph of the test rig with two balancing discs
A similar modal testing procedure as in the previous test rig has been conducted for the
modified rig. The experimentally identified natural frequencies and typical measured FRF
plots are provided in Table 9.6 and Figure 9.12 respectively. The corresponding mode shapes
of the identified natural frequencies are given in Figure 9.13.
Table 9.6 Experimentally identified natural frequencies of test rig with two balancing discs at zero RPM
Mode Frequency (Hz)
1 24.41
2 31.13
3 53.1
4 84.23
𝒛
𝒚
𝒙
Bearing B2
Bearing B1
Disc D2
Disc D1
DAQ hardware

CHAPTER 9 MULTI-PLANES ROTOR UNBALANCE IDENTIFICATION…
216
Figure 9.12 Typical measured FRF plots of the rotor at distance of 53cm from bearing B1 in (a)
vertical and (b) horizontal directions
(a)
(b)

CHAPTER 9 MULTI-PLANES ROTOR UNBALANCE IDENTIFICATION…
217
Figure 9.13 Measured mode shapes of the rig, (a) mode 1, (b) mode 2, (c) mode 3 and (d) mode 4
(a)
(b)
(c)
(d)

CHAPTER 9 MULTI-PLANES ROTOR UNBALANCE IDENTIFICATION…
218
9.8.1 Experiments and unbalance estimation
The modified experimental rig is coasted-up linearly from 0 to 3000 RPM (i.e. 0 to 50 Hz),
and the vibration responses are measured using only one accelerometer at a bearing pedestal
(i.e. at 45 degree direction). The obtained critical speeds of the machine (i.e. around 23 and
32 Hz) are presented in Figure 9.14. A total number of 8 machine coast-ups are conducted
(i.e. one with residual unbalance and seven with different added mass unbalances at a radius
of 6cm) and seven unbalance estimation scenarios are used. The order tracked 1× vibration
components in the speed range from 420 to 2820 RPM (i.e. 7 to 45 Hz) are used together in a
single band for the unbalance estimation. Tables 9.7 and 9.8 list the added unbalances utilised
for the different runs and the cases used for the unbalance estimation, respectively. Table 9.9
shows a comparison between the estimated unbalance and the actual added unbalance for
each case.
Figure 9.14 Typical measured 1× displacement responses in horizontal direction for the machine
runs 3 and 5 at bearings (a) B1 and (b) B2
1st critical speed
2nd
critical speed
(a)
(b)

219
CH
AP
TE
R 9
MU
LT
I-PL
AN
ES
RO
TO
R U
NB
AL
AN
CE
IDE
NT
IFIC
AT
ION…
Table 9.7 List of 8 machine runs with different added unbalances (mass and phase angles)
Run no. Added unbalance (gcm@
°)
Disc D1 Disc D2
run0 Residual unbalance 𝑒1,0 Residual unbalance 𝑒2,0
run1 3g × 6cm @ 330° = 18gcm @ 330° 𝑒1,0 + 𝑒1,1 5g × 6cm @ 0° = 30gcm @ 0° 𝑒2,0 + 𝑒2,1
run2 7g × 6cm @ 60° = 42gcm @ 60° 𝑒1,0 + 𝑒1,2 3g × 6cm @ 30° = 18gcm @ 30° 𝑒2,0 + 𝑒2,2
run3 5g × 6cm @ 90° = 30gcm @ 90° 𝑒1,0 + 𝑒1,3 7g × 6cm @ 330° = 42gcm @ 330° 𝑒2,0 + 𝑒2,3
run4 3g × 6cm @ 60° = 18gcm @ 60° 𝑒1,0 + 𝑒1,4 5g × 6cm @ 270° = 30gcm @ 270° 𝑒2,0 + 𝑒2,4
run5 3g × 6cm @ 330° = 18gcm @ 330° 𝑒1,0 + 𝑒1,5 7g × 6cm @ 0° = 42gcm @ 0° 𝑒2,0 + 𝑒2,5
run6 7g × 6cm @ 30° = 42gcm @ 30° 𝑒1,0 + 𝑒1,6 10g × 6cm @ 0° = 60gcm @ 0° 𝑒2,0 + 𝑒2,6
run7 3g × 6cm @ 30° = 18gcm @ 30° 𝑒1,0 + 𝑒1,7 7g × 6cm @ 330° = 42gcm @ 330° 𝑒2,0 + 𝑒2,7
Table 9.8 Different scenarios used for the added unbalance estimation
Case no. Unbalance Disc D1 Disc D2
Case I run1 − run0 𝑒1,1 𝑒2,1
Case II run2 − run0 𝑒1,2 𝑒2,2
Case III run3 − run0 𝑒1,3 𝑒2,3
Case IV run4 − run0 𝑒1,4 𝑒2,4
Case V run5 − run0 𝑒1,5 𝑒2,5
Case VI run6 − run0 𝑒1,6 𝑒2,6
Case VII run7 − run0 𝑒1,7 𝑒2,7

220
CH
AP
TE
R 9
MU
LT
I-PL
AN
ES
RO
TO
R U
NB
AL
AN
CE
IDE
NT
IFIC
AT
ION…
Table 9.9 Estimated unbalance for the different scenarios using 1 sensor (at radial direction) per bearing pedestal
Case no.
Disc D1 Disc D2
Actual added
unbalance(𝐠@°)
Estimated
unbalance(𝐠@°)
Mass
%error
Phase
difference(°)
Actual added
unbalance(𝐠@°)
Estimated
unbalance(𝐠@°)
Mass
%error
Phase
difference (°)
Case I 3g @ 330° 2.83g @ 333.6° 6.04 3.6° 5g @ 0° 4.51g @ 1.8° 10.85 1.8°
Case II 7g @ 60° 6.38g @ 55.9° 9.7 4.1° 3g @ 30° 2.82g @ 27.7° 6.37 2.3°
Case III 5g @ 90° 4.98g @ 81.2° 0.38 8.8° 7g @ 330° 7.29g @ 342.7° 3.92 12.7°
Case IV 3g @ 60° 3.7g @ 57.5° 19.4 2.5° 5g @ 270° 4.07g @ 280.8° 22.97 10.8°
Case V 3g @ 330° 3.18g @ 338.4° 5.57 8.4° 7g @ 0° 6.01g @ 353.5° 16.39 6.5°
Case VI 7g @ 30° 7.29g @ 19.2° 3.99 10.8° 10g @ 0° 11.82g @ 342.4° 15.39 17.6°
Case VII 3g @ 30° 3.21g @ 21.69° 6.57 8.31° 7g @ 330° 7.57g @ 339.5° 7.52 9.5°

CHAPTER 9 MULTI-PLANES ROTOR UNBALANCE IDENTIFICATION…
221
It can be clearly seen in Table 9.9 that the estimated rotor unbalances (i.e. mass
unbalance and phase angle) using a single vibration sensor per bearing location are of
good accuracy. Therefore, based on the results in Figure 9.10 and Tables 9.4, 9.5 and
9.9, it can be said that the earlier mathematical model-based unbalance estimation
approaches can be simplified and enhanced by using a single vibration sensor at a
bearing pedestal instead of two orthogonal sensors. The foundation model in the current
study was obtained at one direction (i.e. 45-degree direction).
Concluding remarks 9.9
This paper has presented a simplified and computationally efficient method for
identifying and quantifying the state of rotor unbalance in rotating machines using
single vibration sensor per bearing pedestal and single machine’s transient operation.
The proposed mathematical model-based unbalance estimation method requires a
somewhat accurate numerical model of the rotor. Both the earlier and proposed model-
based unbalance estimation approaches were applied on a test rig with one balancing
disc. A comparison between the two methods showed that the unbalance estimation
using a single accelerometer per bearing pedestal provides as accurate results as when
using two orthogonal accelerometers per bearing pedestal. The proposed method was
then applied on a test rig with two balancing discs to investigate the robustness of the
method. Based on the present experimental study, it can be concluded that the use of
one vibration sensor per bearing pedestal is a viable option for the rotor unbalance
estimation. This way, the number of vibration sensors per bearing pedestal can be
reduced by half.
The significant reduction of the number of sensors could be useful to power plants that
have large rotating machines with several bearings as it will reduce the time needed for
the complex signal processing significantly with maintaining the same accuracy. Also,
the reduction of the number of sensors by half will certainly save the cost of the
vibration instrumentation and their maintenance. Moreover, the reduction of the number
of sensors helps in reducing the probability of tripping the rotating machine due to false
signal from faulty sensor.

CHAPTER 9 MULTI-PLANES ROTOR UNBALANCE IDENTIFICATION…
222
Despite that the proposed unbalance estimation method has the potential for future
industrial applications, it was applied only to experimental rig with rolling-element
bearings where the bearing acceleration was regarded as equal to rotor acceleration.
Therefore, the application of the proposed method on test rigs with fluid film bearings
that have clearance is required to fully explore the potential and validate the usefulness
of the method.

CHAPTER 10 CONCLUSIONS AND FUTURE WORK
223
CHAPTER 10
CONCLUSIONS AND FUTURE WORK

CHAPTER 10 CONCLUSIONS AND FUTURE WORK
224
Summary of research context 10.1
Most industries use rotating machines such as power generating turbines for most of
their operations. Thus, the reliability of this category of machines is of high importance
to these industries. The dynamic conditions under which rotating machines work make
them susceptible to several anomalies of which rotor related faults are very rife.
Amongst all rotating machine malfunctions, rotor mass unbalance is known as the most
common contributor to the side effect vibration. If the rotating machine’s vibration due
to rotor mass unbalance exceeds the alarm limits, it may lead to machine failure and
possibly cause catastrophic damages. As a consequence, machine downtime and
unscheduled maintenance actions are required, which in turn have significant operating
cost implications. This emphasises the importance of keeping the vibration due to mass
unbalance in safe margins by regularly balancing rotating machines.
The influence coefficient (IC) balancing approach is commonly used in industries for
on-site balancing of rotating machines. The method is generally applied using vibration
measurements acquired at a single rotor speed. The measured vibrations at a single rotor
speed possibly do not entirely reflect the dynamics of the rotating machine and may
include a high level of noise. Therefore, applying the IC method using vibration
measurements at a single rotor speed may not provide an accurate estimation of the
rotor mass unbalance and hence results in a bad balancing. Therefore, it was proposed in
this study that the current IC balancing method can be improved by using vibration
measurements acquired at multiple rotor speeds together in a single band instead of
single speed. The application of the IC balancing method using vibration response
acquired at multiple speeds in a single band was achieved in the current research
project. The results showed that the unbalance estimation was highly enhanced when
vibration at various speeds in a single band was used. Therefore, this enhancement of
the IC balancing method could be helpful for industries as it will increase the
confidence level of estimating the rotor unbalance accurately and precisely.
Earlier published papers on the IC as well as mathematical model-based unbalance
estimation approaches have used pair of sensors arranged in orthogonal directions at a
bearing pedestal. When applying these methods on rotating machines with multiple
bearings such as gas turbine, several vibration measurements are acquired at each
bearing pedestal. This results in enormous volumes of data sets that are needed to be
processed and interpreted. Consequently, the balancing process mandates a highly

CHAPTER 10 CONCLUSIONS AND FUTURE WORK
225
skilled engineer, who despite the training may still yield an erroneous subjective
diagnosis. Inherently, because of such difficulties, the balancing can be lengthy and
costly. Moreover, the use of multiple sensors at a bearing pedestal could increase the
possibility of shutting the plant down due to false signal from a faulty sensor. Therefore,
an opportunity exists to simplify the IC and model-based balancing approaches by using
only one vibration sensor at a bearing pedestal rather than the usual pair of sensors
arranged in orthogonal directions. Thus, both the IC and model-based unbalance
identification methods were applied in the current research project using single
vibration sensor per bearing pedestal. The results showed that the estimated unbalance
using a single sensor per bearing pedestal, mounted at 45-degree to vertical/horizontal
directions, provides as accurate unbalance estimation as when using two sensors per
bearing location.
Main achievements 10.2
The major accomplishments of this research work are presented below with relating
them to the aims and objectives of this research project presented at the beginning of the
thesis (i.e. Section 1.3).
Objective 1
To experimentally investigate the effectiveness of the application of the influence
coefficient balancing method using vibration measurements acquired at multiple
speeds in a single band.
Achievement and contribution 1
The application of field rotor balancing using the influence coefficient method with
vibration measurements acquired at a single rotor speed as well as multiple rotor speeds
together in a single band was investigated in the current research project. First, the
proposed method was applied on a laboratory rig with a single balancing plane (Chapter
5). Then, the same concept was utilised on laboratory apparatus with multiple balancing
planes (Chapter 6). It was shown that the inclusion of vibration measurements at
multiple speeds during rotatingmachine’srun-up considerably improves the rotor mass
unbalance estimation when compared to the estimation at a single speed. Therefore, it is

CHAPTER 10 CONCLUSIONS AND FUTURE WORK
226
concluded that the use of vibration measurements acquired at multiple rotor speeds in a
single band will significantly increase the effectiveness of machine balancing.
Objective 2
To propose and experimentally examine the effectiveness of the application of the
influence coefficient balancing method using vibration measurements at multiple
machine speeds from only one vibration sensor per bearing pedestal.
Achievement and contribution 2
Comparison between the application of the influence coefficient balancing method
using two orthogonal vibration sensors per bearing location and only one vibration
sensor per bearing location was presented in Chapter 7. The method has been applied on
test rigs with single balancing plane as well as multiple balancing planes. To show the
robustness of the method, different unbalance estimation scenarios have been presented.
It has been found that the application of the influence coefficient method using only one
vibration sensor at a bearing pedestal provides as accurate unbalance estimation as when
using pair of vibration sensors per bearing pedestal. Therefore, the current application of
the influence coefficient balancing method can be enhanced by using only one vibration
sensor at a bearing pedestal, rather than the usual pair of sensors arranged in orthogonal
directions.
Objective 3
To develop a model-based method for identifying rotor mass unbalance using
single vibration sensor per bearing pedestal and single machine’s transient
operation (run-up/run-down).
Achievement and contribution 3
In the present study, the concept of the earlier model-based rotor balancing method was
applied, but instead of using two vibration sensors per bearing pedestal, a single sensor
was used on each pedestal. First, the proposed method has been implemented to a
numerical model that was constructed using FE method. The unbalance estimation
method has been applied using several unbalance configurations. The unbalance has
been identified accurately for all configurations as presented in Chapter 8. Then, the

CHAPTER 10 CONCLUSIONS AND FUTURE WORK
227
method has been validated experimentally on a test rig with two different configurations
(i.e. one with a single balancing plane and the other with multiple balancing planes) as
presented in Chapter 9. Several unbalance estimation scenarios have been used to
investigate the robustness of the method. The results show that the estimated unbalances
using single vibration sensor per bearing pedestal are relatively close to the estimated
unbalances using two vibration sensors per bearing pedestal. This indicates the
potentials of the proposed method for practical applications.
Overall conclusion 10.3
The application of two different balancing approaches of rotating machines (i.e.
influence coefficient and mathematical model-based balancing methods) with reduced
number of sensors was proposed in the current study. For both methods, the actual
added mass unbalances of different scenarios were estimated accurately using single
vibration sensor per bearing pedestal. Moreover, the influence coefficient balancing
method was applied using measured vibration response at multiple speeds in a single
band instead of single speed. The results showed that the application of the influence
coefficient balancing method using vibration data acquired at multiple speeds in a single
band provides more reliable unbalance estimations.
Future work 10.4
In order to utilise the full potential of the proposed balancing approaches as applicable
methods, the following future work is required
1. Performance testing of the proposed balancing methods on rotating machines with
fluid filled journal bearings.
2. Foundation should be flexible in both vertical and horizontal directions, so more
critical speeds present in the transient operation of the rotating machine.
3. Applying the proposed balancing methods on test rigs with multiple bearings as well
as multiple balancing planes.
4. Trailing the proposed methods with data from real machines in industries.

REFERENCES
228
REFERENCES

REFERENCES
229
[1] Saruhan, H. Design optimization of rotor-bearing systems. Pamukkale
University Journal of Engineering Sciences 2011, 9(3).
[2] General electric. 2015; Available from: http://st-
efficiency.gepower.com/zip/GE%209H%20Gas%20Turbine_PSP31369-
063.jpg.zip, (accessed on 15 September 2016).
[3] Yunusa-Kaltungo, A., Sinha, J.K. Sensitivity analysis of higher order coherent
spectra in machine faults diagnosis. Structural Health Monitoring 2016, 15(5),
pp. 555-567.
[4] Lees, A.W., Vibration Problems in Machines: Diagnosis and Resolution. 1st ed,
CRC Press: Boca Raton, USA, 2016.
[5] Sinha, J.K., Health monitoring techniques for rotating machinery, Ph.D. thesis,
University of Wales Swansea: Swansea, UK, 2002.
[6] Verma, A., Sarangi, S., Kolekar, M.H. Experimental investigation of
misalignment effects on rotor shaft vibration and on stator current signature.
Journal of Failure Analysis and Prevention 2014, 14(2), pp. 125-138.
[7] Prabhakar, S., Sekhar, A.S., Mohanty, A.R. Vibration analysis of a misaligned
rotor—coupling—bearing system passing through the critical speed.
Proceedings of the Institution of Mechanical Engineers, Part C: Journal of
Mechanical Engineering Science 2001, 215(12), pp. 1417-1428.
[8] Patel, T.H., Darpe, A.K. Experimental investigations on vibration response of
misaligned rotors. Mechanical Systems and Signal Processing 2009, 23(7), pp.
2236-2252.
[9] Feng, Z.C., Zhang, X.Z. Rubbing phenomena in rotor–stator contact. Chaos,
Solitons & Fractals 2002, 14(2), pp. 257-267.
[10] Mobley, R.K., Maintenance Fundamentals. 1st ed, Butterworth-Heinemann:
Oxford, UK, 2011.
[11] Boyce, M.P., Gas Turbine Engineering Handbook. 4th
ed, Butterworth-
Heinemann: Oxford, UK, 2012, pp. 215-250.
[12] Saleem, M.A., Diwakar, G., Satyanarayana, M. Detection of unbalance in
rotating machines using shaft deflection measurement during its operation. IOSR
Journal of Mechanical and Civil Engineering 2012, 3(3), pp. 08-20.
[13] McMillan, R.B., Rotating Machinery: Practical Solutions to Unbalance and
Misalignment. 1st ed, The Fairmont Press, Inc.: Lilburn, Georgia, 2004.
[14] Li, G., Lin, Z., Allaire, P.E. Robust optimal balancing of high-speed machinery
using convex optimization. ASME Journal of vibration and acoustics 2008,
130(3), pp. 031008-031008-11.
[15] Santos, F.L., Duarte, M.L.M., de Faria, M.T.C., Eduardo, A.C. Balancing of a
rigid rotor using artificial neural network to predict the correction masses. Acta
Scientiarum Technol 2009, 31(2), pp. 151–157.
[16] Lund, J.W., Tonnesen, J. Analysis and experiments on multi-plane balancing of
a flexible rotor. Journal of Manufacturing Science and Engineering 1972, 94(1),
pp. 233-242.
[17] Sinha, J.K., Vibration Analysis, Instruments, and Signal Processing. 1st ed, CRC
Press:Boca Raton, USA, 2014, pp. 264–275.
[18] Cheli, F., Diana, G., Advanced Dynamics of Mechanical Systems. 1st ed,
Springer international publishing: Cham, Switzerland, 2015.
[19] Zhou, S., Shi, J. Active balancing and vibration control of rotating machinery: a
survey. Shock and Vibration Digest 2001, 33(5), pp. 361-371.
[20] Isermann, R., Ballé, P. Trends in the application of model-based fault detection
and diagnosis of technical processes. Control Engineering Practice 1997, 5(5),
pp. 709-719.

REFERENCES
230
[21] Friswell, M.I., Penny, J.E.T., Garvey, S.D., Lees, A.W., Dynamics of Rotating
Machines. 1st ed, Cambridge University Press: Cambridge, UK, 2010.
[22] Bachschmid, N., Pennacchi, P. Multiple fault identification method in the
frequency domain for rotor systems. Shock and Vibration 2002, 9(4-5), pp. 203-
215.
[23] Bachschmid, N., Pennacchi, P., Tanzi, E., Vania, A. Accuracy of modelling and
identification of malfunctions in rotor systems: experimental results. Journal of
the Brazilian Society of Mechanical Sciences 2000, 22(3), pp. 423-442.
[24] Vania, A., Pennacchi, P. Experimental and theoretical application of fault
identification measures of accuracy in rotating machine diagnostics. Mechanical
Systems and Signal Processing 2004, 18(2), pp. 329-352.
[25] Sinha, J.K., Friswell, M.I., Lees, A.W. The identification of the unbalance and
the foundation model of a flexible rotating machine from a single run-down.
Mechanical Systems and Signal Processing 2002, 16(2-3), pp. 255-271.
[26] Lees, A.W., Sinha, J.K., Friswell, M.I. The identification of the unbalance of a
flexible rotating machine from a single rundown. Journal of Engineering for
Gas Turbines and Power-Transactions of the Asme 2004, 126(2), pp. 416-421.
[27] Genta, G., Dynamics of Rotating Systems. 1st ed, Springer Science & Business
Media Inc.: New york, USA, 2005.
[28] Edwards, S., Lees, A.W., Friswell, M.I. Fault diagnosis of rotating machinery.
Shock and Vibration Digest 1998, 30(1), pp. 4-13.
[29] Darlow, M.S., Balancing of High-Speed Machinery. 1st ed., Springer: New
York, USA, 1989.
[30] Meacham, W.L., Talbert, P.B., Nelson, H.D., Cooperrider, N.K. Complex modal
balancing of flexible rotors including residual bow. Journal of Propulsion and
Power 1988, 4(3), pp. 245-251.
[31] Bishop, R.E., Gladwell, G.M. The vibration and balancing of an unbalanced
flexible rotor. Journal of Mechanical Engineering Science 1959, 1(1), pp. 66-77.
[32] Gladwell, G.M., Bishop, R.E. The vibration of rotating shafts supported in
flexible bearings. Journal of Mechanical Engineering Science 1959, 1(3), pp.
195-206.
[33] Bishop, R.E., Parkinson, A.G. On the isolation of modes in the balancing of
flexible shafts. Proceedings of the Institution of Mechanical Engineers 1963,
177(1), pp. 407-423.
[34] Parkinson, A.G., Bishop, R.E. Residual vibration in modal balancing. Journal of
Mechanical Engineering Science 1965, 7(1), pp. 33-39.
[35] Kennedy, C.C., Pancu, C.D.P. Use of vectors in vibration measurement and
analysis. Journal of the Aeronautical Sciences 1947, 14(11), pp. 603-625.
[36] Lindley, A.L., Bishop, R.E. James clayton paper: some recent research on the
balancing of large flexible rotors. Proceedings of the Institution of Mechanical
Engineers 1963, 177(1), pp. 811-841.
[37] Moore, L., Dodd, E. Mass balancing of large flexible rotors. GEC Journal 1964,
31(2), p. 74.
[38] Moore, L., Dodd, E. Balancing of large turbine rotors. Trans. Inst. Maring
Eng.(London) 1969, 81.
[39] Moore, L. The significance of anisotropy of support conditions when balancing
very large flexible rotors. Proceedings of the Institution of Mechanical
Engineers Conference on Vibrations in Rotating Systems, London,UK, 1972.
[40] Gnielka, P. Modal balancing of flexible rotors without test runs: An
experimental investigation. Journal of Sound and Vibration 1983, 90(2), pp.
157-172.

REFERENCES
231
[41] Morton, P. Modal balancing of flexible shafts without trial weights. Proceedings
of the Institution of Mechanical Engineers, Part C: Journal of Mechanical
Engineering Science 1985, 199(1), pp. 71-78.
[42] Li, X., Zheng, L., Liu, Z. Balancing of flexible rotors without trial weights based
on finite element modal analysis. Journal of Vibration and Control 2012, 19(3)
pp. 461-470.
[43] Khulief, Y.A., Mohiuddin, M.A., El-Gebeily, M. A new method for field-
balancing of high-speed flexible rotors without trial weights. International
Journal of Rotating Machinery 2014, pp. 1-11.
[44] Palazzolo, A.B., Gunter, E.J. Modal balancing of a multi-mass flexible rotor
without trial weights. ASME International Gas Turbine Conference and Exhibit,
London,UK, 1982.
[45] Drechsler, J., Gasch, R. Modales auswuchten elastischer läufe ohne
testgewichts-setzungen. VDI-Berichte 1978, 320, pp. 45-54.
[46] Lee, C., Kim, Y. Modal balancing of flexible rotors during operation: design and
manual operation of balancing head. Proceedings of the Institution of
Mechanical Engineers, Part C: Journal of Mechanical Engineering Science
1987, 201(5), pp. 349-355.
[47] Lee, C.W., Joh,Y.D., Kim, Y.D. Automatic modal balancing of flexible rotors
during operation: computer controlled balancing head. Proceedings of the
Institution of Mechanical Engineers, Part C: Journal of Mechanical
Engineering Science 1990, 204(1), pp. 19-28.
[48] Deepthikumar, M.B., Sekhar, A.S., Srikanthan, M.R. Modal balancing of
flexible rotors with bow and distributed unbalance. Journal of Sound and
Vibration 2013, 332(24), pp. 6216-6233.
[49] Yang, T., Lin, C. Estimation of distributed unbalance of rotors. Journal of
Engineering for Gas Turbines and Power-Transactions of the ASME 2002,
124(4), pp. 976-983.
[50] Darlow, M.S. Balancing of high-speed machinery: theory, methods and
experimental results. Mechanical Systems and Signal Processing 1987, 1(1), pp.
105-134.
[51] Sinha, J.K., Lees, A.W., Friswell, M.I. Estimating unbalance and misalignment
of a flexible rotating machine from a single run-down. Journal of Sound and
Vibration 2004, 272(3–5), pp. 967-989.
[52] Messager, T., Pyrz, M. Discrete optimization of rigid rotor balancing. Journal of
Mechanical Science and Technology 2013, 27(8), pp. 2231-2236.
[53] Muszynska, A., Rotordynamics. 1st ed., Taylor & Francis: Florida, USA, 2005.
[54] Thearle, E. Dynamic balancing of rotating machinery in the field. Trans. ASME
1934, 56(10), pp. 745-753.
[55] Hopkirk, K. Notes on methods of balancing. The engineer 1940, 170, pp. 38-39.
[56] Goodman, T.P. A least-squares method for computing balance corrections.
Journal of Manufacturing Science and Engineering 1964, 86(3), pp. 273-277.
[57] Tessarzik, J.M., Badgley, R.H., Anderson, W.J. Flexible rotor balancing by the
exact point-speed influence coefficient method. Journal of Manufacturing
Science and Engineering 1972, 94(1), pp. 148-158.
[58] Den Hartog, J.P., Mechanical Vibrations. 3rd
ed., Mcgraw-Hill book
company,Inc.: New York, USA, 1947.
[59] Grobel, L. Balancing turbine-generator rotors. General electric review 1953,
56(4), p. 22.
[60] Church, A., Plunkett, R. Balancing flexible rotors. Journal of Manufacturing
Science and Engineering 1961, 83(4), pp. 383-388.

REFERENCES
232
[61] Tonnesen, J. Further experiments on balancing of a high-speed flexible rotor.
Journal of Manufacturing Science and Engineering 1974, 96(2), pp. 431-440.
[62] Rieger, N. Computer program for balancing of flexible rotors. Mechanical
Technology Incorporated Report 67TR68 1967.
[63] LeGrow, J.V. Multiplane balancing of flexible rotors-method of calculating
correction weights. Trans. ASME 1971.
[64] Badgley, R. Modern influence coefficient techniques for multiplane rotor
balancing in the factory, test cell and field. Proceedings of the Institution of
Mechanical Engineers Conference on Vibrations in Rotating Systems, London,
UK, 1976, pp. 201-207.
[65] Tessarzik, J.M., Badgley, R.H., Anderson, W.J. Flexible rotor balancing by the
exact point-speed influence coefficient method. Journal of Manufacturing
Science and Engineering 1972, 94(1), pp. 148-158.
[66] Tessarzik, J.M., Badgley, R.H. Experimental evaluation of the exact point-speed
and least-squares procedures for flexible rotor balancing by the influence
coefficient method. Journal of Engineering for Industry 1974, 96(2), pp. 633-
643.
[67] Tessarzik, J.M., Badgley, R.H., Fleming, D.P. Experimental evaluation of
multiplane-multispeed rotor balancing through multiple critical speeds. Journal
of Engineering for Industry 1976, 98(3), pp. 988-998.
[68] Ling, J., Cao, Y. Improving traditional balancing methods for high-speed rotors.
Journal of Engineering for Gas Turbines and Power 1996, 118(1), pp. 95-99.
[69] Kang, Y., Liu, C.P., Sheen, G.J. A modified influence coefficient method for
balancing unsymmetrical rotor-bearing systems. Journal of Sound and Vibration
1996, 194(2), pp. 199-218.
[70] Yu, X. General influence coefficient algorithm in balancing of rotating
machinery. International Journal of Rotating Machinery 2004, 10(2), pp. 85-90.
[71] Lee, S.H., Kim, B.S., Moon, J.D., Kim, D.H. A study on active balancing for
rotating machinery using influence coefficient method. Proceedings of IEEE
International Symposium on Computational Intelligence in Robotics and
Automation, Espoo, Finland, 2005, pp. 659-664.
[72] Zhou, S., Dyer, S.W., Shin, K., Shi, J., Ni, J. Extended influence coefficient
method for rotor active balancing during acceleration. Journal of Dynamic
Systems, Measurement, and Control 2004, 126(1), pp. 219-223.
[73] Dyer, S.W., Ni, J. Adaptive influence coefficient control of single-plane active
balancing systems for rotating machinery. Journal of Manufacturing Science
and Engineering 2000, 123(2), pp. 291-298.
[74] Xu, X., Fan, P.P. Rigid rotor dynamic balancing by two-plane correction with
the influence coefficient method. Applied Mechanics and Materials 2013, 365,
pp. 211-215.
[75] Yunusa-Kaltungo, A., Sinha, J.K. Combined bispectrum and trispectrum for
faults diagnosis in rotating machines. Proceedings of the Institution of
Mechanical Engineers, Part O: Journal of Risk and Reliability 2014, 228(4), pp.
419-428.
[76] Yunusa-Kaltungo, A., Sinha, J.K., Elbhbah, K. HOS analysis of measured
vibration data on rotating machines with different simulated faults. Proceedings
of the 3rd
International Conference on Condition Monitoring of Machinery in
Non-Stationary Operations, Ferrara, Italy, 2013, pp. 81-89.
[77] Nembhard, A.D., Sinha, J.K., Pinkerton, A.J., Elbhbah, K. Condition monitoring
of rotating machines using vibration and bearing temperature measurements.

REFERENCES
233
Proceedings of the 3rd
International Conference on Condition Monitoring of
Machinery in Non-Stationary Operations, Ferrara, Italy, 2013, pp. 159-169.
[78] Nembhard, A., Sinha, J.K., Pinkerton, A., Elbhbah, K. Combined vibration and
thermal analysis for the condition monitoring of rotating machinery. Structural
Health Monitoring-an International Journal 2014. 13(3), pp. 281-295.
[79] Sinha, J.K., Elbhbah, K. A future possibility of vibration based condition
monitoring of rotating machines. Mechanical Systems and Signal Processing
2013, 34(1-2), pp. 231-240.
[80] Elnady, M.E., Sinha, J.K., Oyadiji, S.O. Identification of critical speeds of
rotating machines using on-shaft wireless vibration measurement. Journal of
Physics: Conference Series 2012, 364(1), pp. 1-10.
[81] Nembhard, A., Sinha, J.K., Pinkerton, A., Elbhbah, K. Fault diagnosis of
rotating machines using vibration and bearing temperature measurements.
Diagnostyka 2013, 14(3), pp. 45-51.
[82] Yunusa-Kaltungo, A., Sinha, J.K., Elbhbah, K. An improved data fusion
technique for faults diagnosis in rotating machines. Measurement 2014, 58(0),
pp. 27-32.
[83] Parkinson, A.G., Darlow, M.S., Smalley, A.J., Badgley, R.H. An introduction to
a unified approach to flexible rotor balancing. Proceedings of the ASME
International Gas Turbine Conference and Exhibit and Solar Energy
Conference, San Diego, USA, 1979.
[84] Darlow, M.S., Smalley, A.J., Parkinson, A.G. Demonstration of a unified
approach to the balancing of flexible rotors. Journal of Engineering for Power
1981, 103(1), pp. 101-107.
[85] Darlow, M.S., A unified approach to the mass balancing of rotating flexible
shafts, Ph.D. thesis, University of Florida: Florida, USA, June 1980.
[86] Zorzi, E.S., Lee, C.C., Giordano, J.C. A unified approach to balancing with
multiple constraints. Proceedings of the IFToMM Conference on Rotor
Dynamics, Rome, Italy, 1982.
[87] Kanki, H., Kawanishi, M., Ono, K. A new balancing method applying LMI
optimization method. Proceedings of the 5th International Conference on Rotor
Dynamics, Brunswick, Germany, 1998, p. 667.
[88] Foiles, W.C., Allaire, P.E., Gunter, E.J. Review: rotor balancing. Shock and
Vibration 1998, 5(5-6), pp. 325-336.
[89] Parkinson, A.G., Darlow, M.S., Smalley, A.J. A theoretical introduction to the
development of a unified approach to flexible rotor balancing. Journal of Sound
and Vibration 1980, 68(4), pp. 489-506.
[90] Zorzi, E.S., Lee, C.C., Giordano, J.C. Development and application of a unified
balancing approach with multiple constraints. Proceedings of NASA Advanced
High Pressure O2/H2 Technology conference, Huntsville, USA, 1985, pp. 381-
399.
[91] Tan, S.G., Wang, X.X. A theoretical introduction to low speed balancing of
flexible rotors: unification and development of the modal balancing and
influence coefficient techniques. Journal of Sound and Vibration 1993, 168(3),
pp. 385-394.
[92] Kang, Y., Sheen, G.J., Wang, S.M. Development and modification of a unified
balancing method for unsymmetrical rotor-bearing systems. Journal of Sound
and Vibration 1997, 199(3), pp. 349-369.
[93] Pennacchi, P., Vania, A. Diagnosis and model based identification of a coupling
misalignment. Shock and Vibration 2005, 12(4), pp. 293-308.

REFERENCES
234
[94] Lees, A.W. Towards smart machinery. Advances in Vibration Engineering 2009,
8(3), pp. 201-211.
[95] Tiwari, R., Chakravarthy, V. Identification of the bearing and unbalance
parameters from rundown data of rotors. Proceedings of IUTAM Symposium on
Emerging Trends in Rotor Dynamics, New Delhi, India, 2009, pp. 479-489.
[96] Tiwari, R., Chougale, A. Identification of bearing dynamic parameters and
unbalance states in a flexible rotor system fully levitated on active magnetic
bearings. Mechatronics 2014, 24(3), pp. 274-286.
[97] Arias-Montiel, M., Beltrán-Carbajal, F., Silva-Navarro, G. On line identification
of unbalance parameters and active control in a rotor bearing system.
Proceedings of International Conference on Noise and Vibration Engineering,
Leuven, Belgium, 2012, pp. 139-150.
[98] Vania, A., Pennacchi, P., Chatterton, S. Effects of the shaft normal modes on the
model-based identification of unbalances in rotating machines. Proceedings of
the ASME Turbo Expo, Vancouver, Canada, 2011, pp. 417-424.
[99] Sudhakar, G.N.D.S, Sekhar, A.S. Identification of unbalance in a rotor bearing
system. Journal of Sound and Vibration 2011, 330(10), pp. 2299-2313.
[100] Sekhar, A.S. Identification of unbalance and crack acting simultaneously in a
rotor system: modal expansion versus reduced basis dynamic expansion. Journal
of Vibration and Control 2005, 11(9), pp. 1125-1145.
[101] Parkinson, A.G. Balancing of rotating machinery. Proceedings of the Institution
of Mechanical Engineers Part C-Journal of Mechanical Engineering Science
1991, 205(1), pp. 53-66.
[102] Lees, A.W., Sinha, J.K., Friswell, M.I. Model-based identification of rotating
machines. Mechanical Systems and Signal Processing 2009, 23(6), pp. 1884-
1893.
[103] Bachschmid, N., Pennacchi, P. Accuracy of fault detection in real rotating
machinery using model based diagnostic techniques. JSME International
Journal Series C 2003, 46(3), pp. 1026-1034.
[104] Markert, R., Platz, R., Seidler, M. Model based fault identification in rotor
systems by least squares fitting. International Journal of Rotating Machinery
2001, 7(5), pp. 311-321.
[105] Bachschmid, N., Pennacchi, P., Vania, A. Identification of multiple faults in
rotor systems. Journal of Sound and Vibration 2002, 254(2), pp. 327-366.
[106] Jain, J.R., Kundra, T.K. Model based online diagnosis of unbalance and
transverse fatigue crack in rotor systems. Mechanics Research Communications
2004, 31(5), pp. 557-568.
[107] Bachschmid, N., Pennacchi, P., Vania, A., Gregori, L., Zanetta, G.A. Unbalance
identification in a large steam turbogenerator using model-based identification
and modal foundation, Proceedings of Eighth International Conference on
Vibrations in Rotating Machinery, Swansea, UK, 2004, pp. 383-392.
[108] Bachschmid, N., Pennacchi, P., Vania, A., Gregori, L., Zanetta, G.A.
Identification of rub and unbalance in 320 MW turbogenerators. International
Journal of Rotating Machinery 2003, 9(2), pp. 97-112.
[109] Smart, M.G., Friswell, M.I., Lees, A.W. Estimating turbogenerator foundation
parameters: model selection and regularization. Proceedings of the Royal Society
a-Mathematical Physical and Engineering Sciences 2000, 456(1999), pp. 1583-
1607.
[110] Feng, N.S., Hahn, E.J. Including foundation effects on the vibration behavior of
rotating machinery. Mechanical Systems and Signal Processing 1995, 9(3), pp.
243-256.

REFERENCES
235
[111] Pennacchi, P., Bachschmid, N., Vania, A., Zanetta, G.A., Gregori, L. Use of
modal representation for the supporting structure in model-based fault
identification of large rotating machinery: part 1 - theoretical remarks.
Mechanical Systems and Signal Processing 2006, 20(3), pp. 662-681.
[112] Iwata, Y., Sato, H., Tamura, A. A special case of critical speed of rigid rotors
with anisotropic supports. Journal of Sound and Vibration 1988, 121(1), pp.
161-168.
[113] Barrett, L., Gunter, E., Allaire, P. Optimum bearing and support damping for
unbalance response and stability of rotating machinery. Journal of Engineering
for Gas Turbines and Power 1978, 100(1), pp. 89-94.
[114] Neto, R.R., Bogh, D.L., Flammia, M. Some experiences on rigid and flexible
rotors in induction motors driving critical equipment in petroleum and chemical
plants. Proceedings of the Petroleum and Chemical Industry Conference 2006,
44(3), pp. 923-931.
[115] Bucher, I., Ewins, D.J. Modal analysis and testing of rotating structures.
Philosophical Transactions of the Royal Society of London Series a-
Mathematical Physical and Engineering Sciences 2001, 359(1778), pp. 61-96.
[116] Dias, M., Cavalca, K.L. Experimental analysis of the dynamic behaviour of a
turbomachine foundation structure. Proceedings of the 17th International Modal
Analysis Conference 1999, 32(1), pp. 966-972.
[117] Cavalca, K.L., Cavalcante, F., Okabe, E.P. An investigation on the influence of
the supporting structure on the dynamics of the rotor system. Mechanical
Systems and Signal Processing 2005, 19(1), pp. 157-174.
[118] Stephenson, R.W., Rouch, K.E. Generating matrices of the foundation structure
of a rotor system from test data. Journal of Sound and Vibration 1992, 154(3),
pp. 467-484.
[119] Chen, Y.S., Cheng, Y.D., Yang, T.C., Koai, K.L. Accurate identification of the
frequency response functions for the rotor-bearing-foundation system using the
modified pseudo mode shape method. Journal of Sound and Vibration 2010,
329(6), pp. 644-658.
[120] Sinha, J.K., Friswell, M.I., Lees, A.W., Sinha, R.K. An alternate method for
reliable modelling of flexible rotating machines. Proceedings of the VETOMAC-
II, Mumbai, India, 2002, pp. 16-18.
[121] Lees, A.W., Simpson, I.C. Dynamics of turbo-alternator foundations,
Proceedings of the IMechE conference on vibraitons in rotating machinery,
London, UK, 1983.
[122] Lees, A. The least squares method applied to identify rotor/foundation
parameters. Proceedings of the IMechE conference on vibrations in rotating
machinery, Edinburgh, UK, 1988.
[123] Lees, A.W., Friswell, M.I. The evaluation of rotor imbalance in flexibly
mounted machines. Journal of Sound and Vibration 1997, 208(5), pp. 671-683.
[124] Edwards, S., Lees, A.W., Friswell, M.I. Experimental identification of excitation
and support parameters of a flexible rotor-bearings-foundation system from a
single run-down. Journal of Sound and Vibration 2000, 232(5), pp. 963-992.
[125] Lees, A.W., Edwards, S., Friswell, M.I. The estimation of foundation parameters
and unbalance. Proceedings of the Seventh International Conference on
Vibrations in Rotating Machinery, Nottingham, UK, 2000, pp. 31-41.
[126] Smart, M., Friswell, M.I., Lees, A.W., Prells, U. Estimating turbogenerator
foundation parameters. Proceedings of the Institution of Mechanical Engineers
Part C-Journal of Mechanical Engineering Science 1998, 212(8), pp. 653-665.

REFERENCES
236
[127] Sinha, J.K., Lees, A.W., Friswell, M.I. Estimating the unbalance of a rotating
machine from a single run-down. Proceedings of IMAC-XIX: A Conference on
Structural Dynamics, Kissimmee, USA, 2001, pp. 109-115.
[128] Jalan, A.K., Mohanty, A.R. Model based fault diagnosis of a rotor–bearing
system for misalignment and unbalance under steady-state condition. Journal of
Sound and Vibration 2009, 327(3–5), pp. 604-622.
[129] Tiwari, R. Conditioning of regression matrices for simultaneous estimation of
the residual unbalance and bearing dynamic parameters. Mechanical Systems
and Signal Processing 2005, 19(5), pp. 1082-1095.
[130] Tiwari, R., Chakravarthy, V. Simultaneous identification of residual unbalances
and bearing dynamic parameters from impulse responses of rotor–bearing
systems. Mechanical Systems and Signal Processing 2006, 20(7), pp. 1590-
1614.
[131] Tikhonov, A.N., Arsenin, V.I.A., Solutions of Ill-Posed Problems, 1st ed.,
Winston: Great Falls, USA, 1977.
[132] Tiwari, R.M., Chakravarthy, V. Simultaneous estimation of the residual
unbalance and bearing dynamic parameters from the experimental data in a
rotor-bearing system. Mechanism and Machine Theory 2009, 44(4), pp. 792-
812.
[133] Solidworks 22nd
version, 2014, (computersoftware), Dassault Systèmes
SolidWorks Corporation: Waltham, USA.
[134] Mancuso, J.R., Couplings and Joints: Design, Selection & Application, 2nd
ed.,
Marcel Dekker, Inc: New York, USA, 1999.
[135] Fraden, J., Handbook of Modern Sensors: Physics, Designs, and Applications,
1st ed., Springer: New York, USA, 2010.
[136] Di Paolo Emilio, M., Data Acquisition Systems: from Fundamentals to Applied
Design, 1st ed., Springer: New York, USA, 2013.
[137] Tichý, J., Erhart, J., Kittinger, E., Prívratská, J., Fundamentals of Piezoelectric
Sensorics: Mechanical, Dielectric, and Thermodynamical Properties of
Piezoelectric Materials. 1st ed., Springer: Heidelberg, Germany, 2010.
[138] Levinzon, F., Piezoelectric Accelerometers with Integral Electronics. 1st ed.,
Springer: Cham, Switzerland, 2015.
[139] Wang, X., Vehicle Noise and Vibration Refinement. 1st ed., Woodhead
Publishing Limited: Cambridge, UK, 2010.
[140] Das, A., Signal Conditioning: an Introduction to Continuous Wave
Communication and Signal Processing. 1st ed., Springer: . Heidelberg, Germany,
2012.
[141] Ozkul, T., Data Acquisition and Process Control using Personal Computers. 1st
ed., Marcel Dekker, Inc.: New York, USA, 1996.
[142] Kester, W., Data Conversion Handbook. 1st ed., Elsevier: Burlington, USA,
2005.
[143] Bishop, R.H., Mechatronic System Control, Logic, and Data Acquisition. 2nd
ed.,
CRC Press: New York, USA, 2008.
[144] MATLAB version 8.1, 2013, (computer software),The MathWorks Inc.: Natick,
USA.
[145] Young, W.C., Budynas, R.G. Roark's Formulas for Stress and Strain. 7th
ed.,
McGraw-Hill: New York, USA, 2002.
[146] Labuschagne, A., Van-Rensburg, N.F.J., Van-Der-Merwe, A.J. Comparison of
linear beam theories. Mathematical and Computer Modelling 2009, 49(1–2), pp.
20-30.

REFERENCES
237
[147] Bauchau, O.A., Craig, J.I., Structural Analysis: with Applications to Aerospace
Structures. 1st ed., Springer: Dordrecht, Netherlands, 2009.
[148] Pepper, D.W., Heinrich, J.C., The Finite Element Methods: Basic Concepts and
Applications. 2nd
ed., Taylor & Francis: New York, USA, 2006.
[149] Buchholdt, H.A., Structural Dynamics for Engineers. 1st ed., Thomas Telford:
London, UK, 1997.
[150] Wijker, J.J., Mechanical Vibrations in Spacecraft Design. 1st ed., Springer: New
York, USA, 2004.
[151] Rao, S.S., Mechanical Vibrations. 5th
ed., Pearson/Prentice Hall: New Jersey,
USA, 2011.
[152] Bendat, J.S., Piersol, A.G., Engineering Applications of Correlation and
Spectral Analysis. 2nd
ed., Wiley-Interscience: New York, USA 1993.
[153] Blough, J.R. Improving the analysis of operating data on rotating automotive
components, Ph.D. thesis, University of Cincinnati: Cincinnati,USA, December
1998.
[154] Genta, G., Vibration Dynamics and Control. 1st ed., Springer: New York, USA
2009.
[155] Sujatha, C., Vibration and Acoustics: Measurement and Signal Analysis. 1st ed.,
Tata McGraw-Hill Education Private Ltd.: New Delhi, India, 2010.
[156] De Silva, C.W., Vibration: Fundamentals and Practice. 1st ed., CRC Press LLC:
New York, USA 2000.
[157] De Silva, C.W., Vibration Monitoring, Testing, and Instrumentation. 1st ed.,
CRC Press LLC: New York, USA 2007.
[158] Randall, R.B., Vibration-Based Condition Monitoring: Industrial, Aerospace
and Automotive Applications. 1st ed., John Wiley & Sons, Ltd: West Sussex, UK
2011.
[159] Sekhar, A.S., Prabhu, B.S. Effects of coupling misalignment on vibrations of
rotating machinery. Journal of Sound and Vibration 1995, 185(4), pp. 655-671.
[160] Rangwala, A.S., Reciprocating Machinery Dynamics. 1st ed., New Age
International, Ltd.: New Delhi, India, 2006.
[161] Zori, E.S., Lee, C.C., Giordano, J.C. A unified approach to balancing with
multiple constrain. Proceedings of the First International Conference on Rotor
Dynamics, 1982.
[162] Boyce, M.P., Gas Turbine Engineering Handbook. 4th
ed, Butterworth-
Heinemann: Oxford, UK, 2012, pp. 215-250.
[163] Ibn Shamsah, S., Sinha, J.K., Mandal, P. Precaution during the field balancing of
rotating machines. Proceeding of the 1st International Conference on
Maintenance Engineering, Manchester, UK, 2016.
[164] Ibn Shamsah, S., Sinha, J.K., Mandal, P. Sensitivity analysis of in-situ rotor
balancing. Proceeding of the Vibration in Rotating Machinery (VIRM 11),
Manchester, UK, 2016.
[165] Fang, J., Wang, Y., Han, B., Zheng, S. Field balancing of magnetically levitated
rotors without trial weights. Sensors 2013, 13(12), pp. 16000-16022.
[166] lrretier, H.D. History and development of frequency domain methods in
experimental modal analysis. Journal de Physique IV 2002, 12(11), pp. 91-100.
[167] Nembhard, A., Sinha, J.K. Unified multi-speed analysis (UMA) for the
condition monitoring of aero-engines. Mechanical Systems and Signal
Processing 2015, 64-65, pp. 84-99.
[168] Nembhard, A.D., Sinha, J.K., Yunusa-Kaltungo, A. Development of a generic
rotating machinery fault diagnosis approach insensitive to machine speed and
support type. Journal of Sound and Vibration 2015, 337, pp. 321-341.

REFERENCES
238
[169] Mobley, R.K., Vibration Fundamentals. 1st ed, Butterworth-Heinemann: Oxford,
UK, 1999.
[170] Walker, R.B., Vayanat, R., Perinpanayagam, S., Jennions, I.K. Unbalance
localization through machine nonlinearities using an artificial neural network
approach. Mechanism and Machine Theory 2014, 75(0), pp. 54-66.
[171] Sinha, J.K., Lees, A.W., Friswell, M.I. Estimating the static load on the fluid
bearings of a flexible machine from run-down data. Mechanical Systems and
Signal Processing 2004, 18(6), pp. 1349-1368.
[172] Ben-Israel, A., Greville, T.N.E., Generalized Inverses: Theory and Applications.
2nd
ed, Springer: New York, USA, 2003.
[173] Demmel, J.W., Applied Numerical Linear Algebra. 1st
ed, Society for Industrial
and Applied Mathematics: Philadelphia, USA, 1997.
[174] Irretier, H. Mathematical foundations of experimental modal analysis in rotor
dynamics. Mechanical Systems and Signal Processing 1999, 13(2), pp. 183-191.
[175] Lees, A.W., Sinha, J.K., Friswell, M.I. Estimating rotor unbalance and
misalignment from a single run-down. Proceedings of the 5th International
Conference on Modern Practice in Stress and Vibration Analysis, Glasgow, UK,
2003. [176] Zienkiewicz, O.C., Taylor, R.L., Zhu, J.Z., The Finite Element Method. 6
th ed,
Elsevier Butterworth-Heinemann: Oxford, England, 2005.
[177] Cook, R.D., Malkus, D.S., Pelsha,M.E., Witt, R.J., Concepts and Applications of
Finite Element Analysis. 4th
ed, John Wiley: New York, USA, 2001.

APPENDICES
239
APPENDICES

APPENDICES
240
Appendix A.
A MATLAB program is written to plot the time waveform corresponding to the signal
in Equation (4.44) and its vibration spectrum
%Equation (4.44) clc clear all close all N=2^14; fs=5000; dt = 1/fs; TT= N*dt; T = 0: dt :TT ; f= 60; w=2*pi*f; x = 2*sin(0.5*w*T)+2*sin(w*T)+2*sin(2*w*T)+2*sin(3*w*T)+2*sin(4*w*T); fontsize = 14; hFig = figure(1); clf plot(T,x) set(hFig, 'Position', [200 200 1000 400]) % set(hFig, 'Position', [how far from centre to right how far from centre to right WIDTH HEIGHT]) set(gca,'FontSize',fontsize,'Fontname','times new roman'); xlabel('Time (sec)','FontSize',fontsize,'Fontname','times new roman'); ylabel('Displacement (mm)','FontSize',fontsize,'Fontname','times new roman'); set(gca,'xtick',0:0.01:0.100) set(gca,'ytick',-8:2:8) axis([0, 0.100,-8,8]) %%% uu = fft(x); u=abs(uu(1:(N)/2))/(N/2); df = 1/TT; fnyquist = fs/2; f=0:df:fnyquist-(fs/(N)); hFig = figure(2); clf plot(f,u) set(hFig, 'Position', [200 200 1000 400]) set(gca,'FontSize',fontsize,'Fontname','times new roman'); xlabel(' Frequency (Hz)','FontSize',fontsize,'Fontname','times new roman'); ylabel('Displacement (mm)','FontSize',fontsize,'Fontname','times new roman'); set(gca,'xtick',0:1800/60:18000/60) set(gca,'ytick',0:0.2:2) axis([0, 18000/60,0,2])