
Engineering Technologies for Precision Farming€¦ · Developments in sensing technology for such...
16
1 ENGINEERING TECHNOLOGIES FOR PRECISION FARMING Kenneth A. Sudduth Agricultural Engineer USDA-Agricultural Research Service Columbia, Missouri, USA Precision farming, precision agriculture or site-specific management (SSM) is a management system where crop production practices and inputs such as seed, fertilizers and pesticides are variably applied within a field. Input rates are based on the needs for optimum production at each within-field location. Since over-application and under-application of agrochemicals are both minimized, this strategy has the potential for maximizing profitability and minimizing environmental impacts. In the early part of the 20th century, scholars were already studying variability in soil properties such as nutrient status and organic matter levels, and documenting spatial variations in crop yields. In the United States, the University of Illinois was even advising farmers to map soil acidity variations within their fields and vary application rates of lime accordingly (Linsley and Bauer, 1929). Although researchers have continued to report on soil and yield variability through the years, the mechanization of agriculture and the trend toward larger implements led agricultural production to treat larger and larger areas as homogeneous. In the early 1980's, agricultural engineers began to write about control systems that would respond to variations in field conditions and apply varying amounts of inputs such as herbicides or fertilizers. For example, Krishnan et al. (1981) worked to develop a soil organic matter sensor that could be used as part of a variable rate herbicide application system. Rudolph (1983) speculated that future equipment would control application rates of fertilizers, herbicides, and insecticides based on field condition maps stored in an onboard computer. This prediction soon became reality, when Ortlip (1986) was issued a U.S. patent for such an invention. In the intervening years, technological advances and the increasing pressure of environmental concerns have increased interest in the concept of defining smaller management units and applying inputs based on the individual characteristics of those units, in the concept now generally referred to as precision farming. This paper examines some of the engineering technologies that are important to the implementation of precision farming, relates these technologies to the overall precision management system, and discusses future trends and needs in the field. PRECISION FARMING AS AN INTEGRATED SYSTEM The precision farming approach is not a product of engineering technology, but rather has its foundation in the application of sound agronomic principles on a within-field, point-to-point basis. However, the practical implementation of precision farming is dependent on technological developments to provide, manage, and utilize the vast quantities of data required to understand spatial variations in crop yields and in the factors that affect yields. Today, low-cost powerful computers, real-time controllers, variable rate application hardware, accurate location systems, and advances in sensor technology have combined to provide the technology to make precision farming a reality.
Transcript of Engineering Technologies for Precision Farming€¦ · Developments in sensing technology for such...

1
ENGINEERING TECHNOLOGIES FOR PRECISION FARMING
Kenneth A. SudduthAgricultural Engineer
USDA-Agricultural Research ServiceColumbia, Missouri, USA
Precision farming, precision agriculture or site-specific management (SSM) is a management systemwhere crop production practices and inputs such as seed, fertilizers and pesticides are variably appliedwithin a field. Input rates are based on the needs for optimum production at each within-fieldlocation. Since over-application and under-application of agrochemicals are both minimized, thisstrategy has the potential for maximizing profitability and minimizing environmental impacts.
In the early part of the 20th century, scholars were already studying variability in soil properties suchas nutrient status and organic matter levels, and documenting spatial variations in crop yields. In theUnited States, the University of Illinois was even advising farmers to map soil acidity variations withintheir fields and vary application rates of lime accordingly (Linsley and Bauer, 1929). Althoughresearchers have continued to report on soil and yield variability through the years, the mechanizationof agriculture and the trend toward larger implements led agricultural production to treat larger andlarger areas as homogeneous.
In the early 1980's, agricultural engineers began to write about control systems that would respondto variations in field conditions and apply varying amounts of inputs such as herbicides or fertilizers. For example, Krishnan et al. (1981) worked to develop a soil organic matter sensor that could beused as part of a variable rate herbicide application system. Rudolph (1983) speculated that futureequipment would control application rates of fertilizers, herbicides, and insecticides based on fieldcondition maps stored in an onboard computer. This prediction soon became reality, when Ortlip(1986) was issued a U.S. patent for such an invention. In the intervening years, technologicaladvances and the increasing pressure of environmental concerns have increased interest in the conceptof defining smaller management units and applying inputs based on the individual characteristics ofthose units, in the concept now generally referred to as precision farming. This paper examines someof the engineering technologies that are important to the implementation of precision farming, relatesthese technologies to the overall precision management system, and discusses future trends and needsin the field.
PRECISION FARMING AS AN INTEGRATED SYSTEM
The precision farming approach is not a product of engineering technology, but rather has itsfoundation in the application of sound agronomic principles on a within-field, point-to-point basis. However, the practical implementation of precision farming is dependent on technologicaldevelopments to provide, manage, and utilize the vast quantities of data required to understand spatialvariations in crop yields and in the factors that affect yields. Today, low-cost powerful computers,real-time controllers, variable rate application hardware, accurate location systems, and advances insensor technology have combined to provide the technology to make precision farming a reality.

2
The precision farming approach to crop production may be viewed as a four-step process (Figure 1). An initial step in this process is spatial measurement of those factors that limit or otherwise affectcrop production. These variability data are then used to develop a management plan for the variableapplication of inputs such as fertilizers and herbicides. Inputs are applied in precision field operations. Finally, the effectiveness of the precision farming system is evaluated with respect to economics andenvironmental impacts. This evaluation becomes a part of the data collection process for the nextcropping season. Multiple iterations through the cycle allow for refinement of the precisionmanagement plan in succeeding seasons.
Engineering knowledge and expertise make important contributions to all portions of the system. Systems and devices designed and developed by engineers (GPS systems, sensors, sample collectionequipment, etc.) are essential for the efficient collection of the data required in precision agriculture. Precision field operations rely on Aintelligent@ machines developed by engineers to accurately andprecisely apply varying rates of fertilizers, herbicides, and other inputs. Although perhaps lessobvious, engineering contributions are also important for management planning and for evaluationof the precision farming system. Both management planning and evaluation require integration,manipulation, and analysis of large quantities of data. Automated data management systemsdeveloped in part by engineers play an important role in making this process feasible.
SENSING TECHNOLOGIES
GPS for Location Sensing
Almost all precision agriculture activities now use Global Positioning System (GPS) receivers toprovide the spatial coordinates required to generate mapped information. Full availability of the GPSsatellite constellation in the early 1990's was a key to enabling the effective measurement of within-field spatial variability. The Global Positioning System is a satellite-based radionavigation systemdeveloped and operated by the U.S. Department of Defense that allows users to accurately determine
Data Collection Management Planning
Precision Field OperationsEvaluation
Figure 1. The cyclic nature of the precision farming approach.

3
their three-dimensional position and velocity anywhere in the world. A detailed description of theapplication of GPS to precision farming can be found in Tyler et al. (1997).
One relatively new use of GPS data is for detailed topographic mapping, using an approach calledreal-time kinematic (RTK) GPS. In many production settings, topography may have a profoundeffect on within-field variability. Topography controls surface water redistribution over thelandscape, can influence crop growth through differences in aspect, and may provide informationabout soil type differences. This may be the case even in relatively flat fields. Our experienceindicates that topography can have a significant influence on spatial variability in yields even whenaverage field slopes are less than 1% (Sudduth et al., 1996). Especially in areas of flat topography,it is difficult to efficiently obtain topographic maps with the required vertical resolution. Standardsurveying techniques can be used, but require a significant investment of time and labor.
The RTK technique can provide elevation accuracies of as good as 5 cm, an improvement of almosttwo orders of magnitude when compared to standard differential GPS (dGPS). This improvementis possible because RTK systems extract additional information by examining the carrier wave of theGPS signal (Tyler et al., 1997). Drawbacks of RTK systems include a higher cost (about a factor of10 to 1 in the U.S.), the need to establish a local base station, and a significant decrease in robustnesswhen compared to standard dGPS methods. However, these RTK systems do have the potential toprovide efficient and highly detailed elevation data for defining within-field topography (Clark andLee, 1998).
Close-range Sensors
With the exception of grain yield, most spatial data collection done commercially in precisionagriculture is through laboratory analysis of collected samples. There is a tremendous need andopportunity for development of sensing technologies which will allow automated collection of soil,crop, and pest data. It is especially important to develop and implement sensor technology for thoseparameters, such as soil nitrate and soil moisture, which can change rapidly (both spatially andtemporally) and must be measured in real-time or near real-time to be useful for input control. Sensors will allow the collection of data on a much finer spatial resolution than is currently feasiblewith manual and/or laboratory methods, to more accurately characterize within-field variability.
A number of sensors are in varying states of development in government, university, and industry. Some of the soil variables for which sensors are under development include soil organic matter(important for herbicide and fertilizer application), nutrient level (for fertilizer application), pH (forliming rate and herbicide application), moisture (for seeding depth), and topsoil depth (for seedingand fertilizer application rates). Crop-related variables to be sensed for input management includeweed pressure and identification (for intermittent herbicide application), crop condition (for within-season fertilizer application), plant population, and crop quality factors such as grain protein. Developments in sensing technology for such soil and crop variables were reviewed by Sudduth etal. (1997) and Hummel et al. (1996).
One example of an emerging sensing technology for precision farming is our work on mapping water-related soil productivity differences. We have found that soil electrical conductivity (EC) as measured

4
by electromagnetic induction (EM) sensing can be used to estimate topsoil depth on certain soil types(Doolittle et al., 1994). To exploit this relationship for precision management, we have developedan automated sensing system for on-the-go whole-field mapping of topsoil depth. Measurements ofEC obtained with this system have helped to explain crop production variability for most crop yearson several different soil types (Kitchen et al., 1997). Especially in water-stressed growing seasons,the correspondence between topsoil depth estimated by EC and crop growth and yields has oftenbeen striking (Figure 2).
Yield Mapping Systems
Figure 2. Corn grain yield in 1997 (top), topsoil depth estimated by soil electricalconductivity (EC) sensing (center), and aerial photo taken at 1997 corn tasseling (bottom)for a 13 ha Missouri field. Darker shadings represent higher yields, deeper topsoil (lowerEC), and greater crop growth, respectively.

5
The in-field variation of crop yield is an important input for site-specific decision making. Crop yieldis an integrator of the many varying crop and soil parameters which are present, such as moisture,nutrients, pest problems, and many others. Linking spatial information on both yield and soilproperties through a GIS system can allow for diagnostic determination of the predominant factor(s)controlling crop production. This then becomes the basis for developing precision input strategies. Also, yield measurements can provide feedback on the effect of variable rate application of inputs,allowing refinement of the application plan for future years. Yield sensors have been developed forcrops such as potatoes, forage, and hay, but most yield sensing efforts have focused on grain crops.
Aftermarket grain yield monitors have been available for several years in the U.S. and abroad, and the major grain combine manufacturers are also offering them as original equipment on theirmachines. Most commercial systems available in the U.S. are impact-based (Pierce et al., 1997). In these systems the grain leaving the clean grain elevator impacts against an instrumented plate, andthe system relates this impact to a grain flow rate. When properly calibrated, yield monitor systemsare usually very accurate (<1% to 5% error; Pierce et al., 1997) at determining yield averages overlarge areas. Yield estimates are less accurate over small areas, and least accurate when consideringinstantaneous data.
Commercial yield monitoring systems directly measure grain flow rate, tap into existing data sourceson the combine for ground speed, and integrate GPS position data. For width of cut, these systemsrely on the operator to manually input an estimate, which is then used in yield calculations. Moreaccurate yield measurements would be possible if this cut width could be accurately sensed on-the-go,especially in irregularly shaped fields and other situations where the operator may not be able tomaintain a constant swath. Researchers have implemented cut width measurement using ultrasonicsensing technology and through processing of high-accuracy GPS data (Sudduth et al., 1998; Hanet al., 1997), but such systems are not yet commercially available. Combine dynamics are most oftenestimated by a time delay implemented in data processing software. Researchers have noted thelimitations inherent in this approach and have suggested the use of more complex models (e.g. Birrellet al., 1996). Development of process-based models of combine grain flow dynamics would be amajor engineering contribution to improving the accuracy of yield mapping.
Remote Sensing
Remote sensing is another technology which holds promise for precision agriculture. A number ofresearchers and producers are already making use of aerial and satellite images to visualize variabilitywithin fields. This technology has been especially helpful for identifying crop stand problems andwithin-season crop stress such as may be caused by pest infestation or water or nutrient deficiency(Frazier et al., 1997). Several commercial entities in the U.S. are making plans to provide timely,high-resolution (1 m to 10 m), rapid-revisit satellite imagery for agricultural applications, but noneof these systems are yet in place.
VARIABLE RATE TECHNOLOGY
The ability to precisely vary application rates while traversing a field is an essential part of precision

6
farming. The variable rate technology (VRT) that makes this possible is probably the best developedpart of the integrated precision farming system, having been available since the early 1980's. Untilnow, much of the VRT equipment developed in the U.S. has been targeted at the custom applicationmarket, where the costs of the technology can be spread over larger acreages. More recently, farmlevel controllers for VRT fertilizer application, herbicide application, and seeding have becomeavailable. Other developments include VRT irrigation systems and VRT application of animalmanures (Searcy, 1995).
Control decisions for variable rate application can be implemented either on-line or off-line. In theon-line, or sensor-based approach, the controlled equipment incorporates onboard sensors and thesensor data are used immediately for automatic control. In the off-line, or map-based approach, dataare collected and stored in one operation, and the controlled equipment uses the information in aseparate field operation. The map-based approach allows more flexibility in data manipulation andpreprocessing but requires that the location of equipment in the field be precisely defined, as withGPS. Most systems currently available are map-based, but more on-line systems will likely becomeavailable as real-time sensing technologies become more mature. Hybrid systems which rely on acombination of both mapped and real-time data may also come into more widespread use. Morganand Ess (1997) summarized the advantages and disadvantages of map based systems as follows:
Advantages of Map-Based Systems:C Does not require soil or plant sensors, which are currently limited in availability.C Amount of product needed can be calculated before application.C Time is available between data collection and sampling to permit more intensive data
analysis and processing, potentially improving results.C System is able to Alook ahead@ at the application rates needed at future locations in
the field to minimize errors due to lag times.
Disadvantages of Map-Based Systems:C Require use of a positioning system, such as GPSC Data or samples must be collected, analyzed, and the results organized for mapping.C Specialized software (and the knowledge to run it) is required to produce maps.C Positioning errors during data collection and application can create inaccuracy.C Creation of application maps by interpolation of discrete observations can cause errors
at locations between the sample points.C Not well suited to controlling applications based on rapidly varying characteristics (for
example, soil nitrate level).
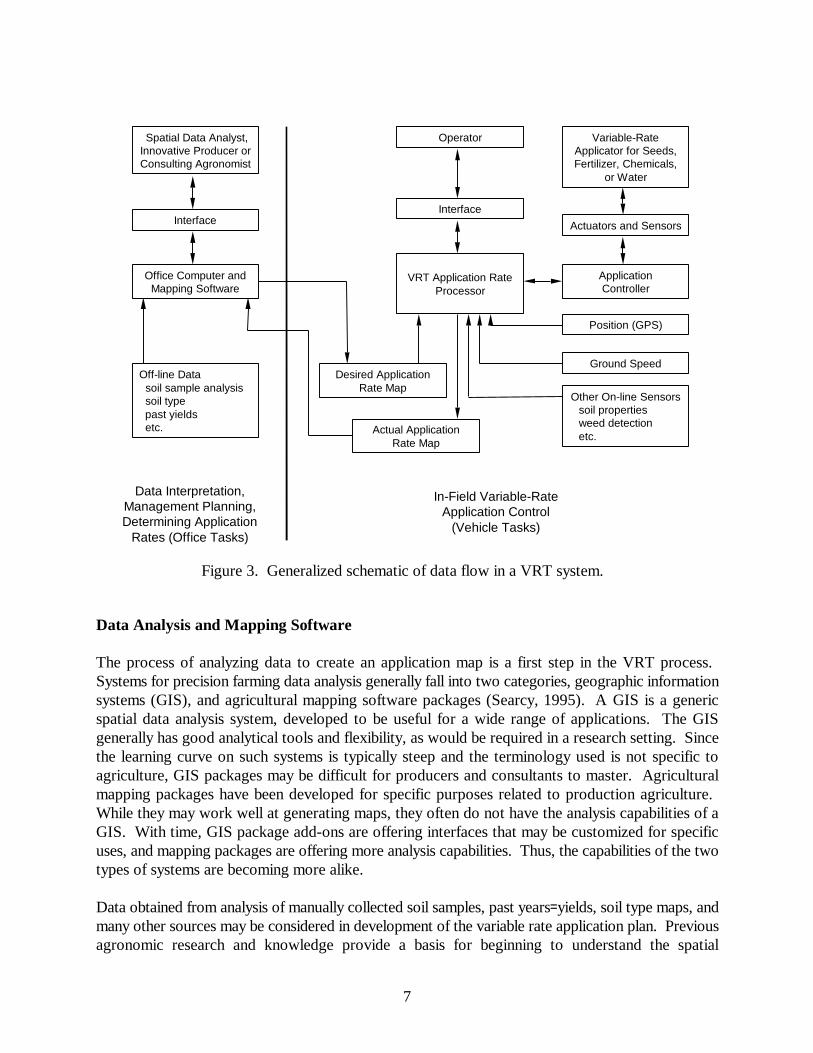
Development and implementation of a VRT system presents a number of engineering challenges. Physical connectivity and data flow in such a system can be quite complex (Figure 3). The generalVRT system consists of both office tasks and vehicle tasks. Office tasks include interpreting inputdata, developing management plans, and determining application rate maps. Vehicle tasks includeusing these application rate maps in conjunction with onboard sensors and actuators to applyfertilizer, chemicals or inputs in the field. In any given VRT system, the elements shown in thisgeneral schematic (Figure 3) may not be present. For example, a system may or may not include on-line sensors and may or may not generate an actual application rate map.
7
Data Analysis and Mapping Software
The process of analyzing data to create an application map is a first step in the VRT process. Systems for precision farming data analysis generally fall into two categories, geographic informationsystems (GIS), and agricultural mapping software packages (Searcy, 1995). A GIS is a genericspatial data analysis system, developed to be useful for a wide range of applications. The GISgenerally has good analytical tools and flexibility, as would be required in a research setting. Sincethe learning curve on such systems is typically steep and the terminology used is not specific toagriculture, GIS packages may be difficult for producers and consultants to master. Agriculturalmapping packages have been developed for specific purposes related to production agriculture. While they may work well at generating maps, they often do not have the analysis capabilities of aGIS. With time, GIS package add-ons are offering interfaces that may be customized for specificuses, and mapping packages are offering more analysis capabilities. Thus, the capabilities of the twotypes of systems are becoming more alike.
Data obtained from analysis of manually collected soil samples, past years= yields, soil type maps, andmany other sources may be considered in development of the variable rate application plan. Previousagronomic research and knowledge provide a basis for beginning to understand the spatial
Office Computer andMapping Software
Off-line Data soil sample analysis soil type past yields etc.
VRT Application RateProcessor
Desired ApplicationRate Map
Actual ApplicationRate Map
Interface
Other On-line Sensors soil properties weed detection etc.
Position (GPS)
Ground Speed
Interface
Spatial Data Analyst,Innovative Producer orConsulting Agronomist
Operator
ApplicationController
Variable-RateApplicator for Seeds,Fertilizer, Chemicals,
or Water
Data Interpretation,Management Planning,Determining Application
Rates (Office Tasks)
In-Field Variable-RateApplication Control
(Vehicle Tasks)
Actuators and Sensors
Figure 3. Generalized schematic of data flow in a VRT system.

8
relationships between yields and other measured factors. However, the use of traditional, generalresponse relationships based on aggregation of data from numerous sites across a state or region toguide precision application is questionable. Rather, research indicates that crop response is a site-specific parameter, and may vary from region to region and even from place to place within a singlefield. For example, Vanotti and Bundy (1994) advocated developing crop nitrogen fertilizerrecommendations by grouping soil series with similar nitrogen response data. This points to the factthat data analysis systems should be flexible and allow the user to tailor the analysis to the specificproblem at hand. Unfortunately, a number of the systems available rely on a predefined, and oftenquite limited set of analysis capabilities. The advanced user of such a system may rapidly becomefrustrated when unable to complete a needed analysis operation.
As precision farming becomes widely implemented, the need for professional agronomic advice andknowledge may well outstrip the availability of trained professionals. Implementation ofcomputerized decision support systems (DSS) will be necessary to fill this gap. Several researchershave developed prototype decision support frameworks for site-specific management, usually basedon GIS technology. Crop growth modeling and expert system analysis have been incorporated toestimate potential yields and fertilizer requirements (Hoogenboom et al., 1993). As noted by Fraisseet al. (1998), a successful model-based DSS for precision agriculture must also integrate methods toaccount for spatial interactions (primarily water flows) between adjacent areas of the field. Continuing progress in the area of DSS development and validation will be required to provide thetools needed for widespread commercial use of precision farming methods.
Desired Application Rate Maps
The desired application rate maps form the interface between the office computer system and thevehicle system. A single-product applicator can be driven from a single map, while multiple-productapplicators are driven from a suite of maps. Most map formats for variable rate application areproprietary. This means that the application map either must be generated by software from the samecompany as the VRT application rate processor, or must be converted into the proprietary format bya translation utility provided by the manufacturer. In practice, dealing with this these proprietaryformats can be a major problem for users of VRT application systems. If the user wishes to developand implement an application plan in a way not envisioned by the manufacturer, he may find itexceedingly difficult with some proprietary software. This limitation can be exacerbated by the factthat data import and export facilities are rudimentary at best in some systems. If one cannot do therequired data manipulations within the software and cannot import an externally-generated map file,then it may be impossible to create the desired application map.
One organization addressing the difficulties associated with data interchange, and the need for datainterchange standards is the Ag Electronics Association (AEA), which consists of a number ofcompany and organizational members interested in standards development for agriculturalinformation. According to the AEA website (www.agelectronicsassn.org), they have been developinga transport support layer (TSL) to facilitate the exchange of computerized agricultural data,particularly data with spatial content, by providing a standardized framework for identifying anddescribing the data sets to be exchanged. Rather than define a particular spatial data format, TSL isintended to be used with a variety of existing formats, both proprietary and public domain, that are

9
widely used in the precision agriculture community. The intent is to automate both the export andimport sides of the process. However, standards development and implementation is a lengthyprocess, and the TSL approach may not be incorporated into commercial software for some time. Until that time, VRT system users should carefully consider the capabilities of the application mapdevelopment software usable with their system, to make sure it has the flexibility to handle theanalyses they will want to implement.
Position and Velocity Measurement
In-field vehicle position is generally determined with a differential GPS (dGPS) receiver. StandarddGPS accuracies of 1 to 3 m are generally sufficient for locating vehicle position relative to anapplication map. However, higher accuracies are required if the GPS signal is to be used forapplicator guidance. RTK-GPS techniques discussed earlier can provide horizontal accuracies in the2 to 20 cm range, and could be used for guidance systems. Another potential problem with GPS isloss of signal when passing close to trees, buildings, or other obstructions. Several hybrid positioningsystems that include both a relative positioning component and GPS have been developed toovercome this problem. The relative component (an inertial system or a combination of velocity andheading sensors) provides short-term position updates if the GPS signal is lost, while the GPSprovides longer-term position stability (van Bergeijk et al., 1998).
The best source of velocity data for precision application is a Doppler sensor, such as a radar. Radardata is generally output multiple times a second, giving it a better temporal resolution than GPSvelocity, which is most often updated only once a second. This slower update rate with GPS maynot be satisfactory when the applicator is stopping or starting. Depending on acceleration, theapplicator may travel up to 3 m during a one second period between the start of motion and theacquisition of a nonzero GPS velocity (Anderson and Humburg, 1997).
On-Line Sensors
Data obtained from sensors on the applicator vehicle may be used to assess field conditions and todetermine (in whole or in part) desired application rates. One example of a commercial systemcontrolled by on-line sensors is the ADetectspray@1, which locates green plant material against a soilor residue background using optoelectronic sensors, and turns on a herbicide spray nozzle at theappropriate time (Biller, 1998). This approach has advantages in being able to respond to temporallyvariable field conditions, such as weed presence, but places additional computational demands on theapplicator controller, so that the on-line information can be processed and the appropriate ratecommand issued in a timely manner. Sudduth et al. (1997) reviewed sensors for precision agriculture,including a number of which would be applicable to on-line applicator control.
1 Mention of trade names or commercial products is solely for the purpose of providing specificinformation and does not imply recommendation or endorsement by the United States Departmentof Agriculture.

10
Actual Application Rate Maps
Some, but not all, VRT systems generate maps of actual application rates. At specified time ordistance intervals, current rates reported by the application controller are logged, along with a GPSposition and time tag. These maps are useful for evaluating and documenting performance of theVRT system. They also provide a lasting record of what was applied, along with when and wherethat application occurred. As such, they may be useful to document compliance with environmentalregulations that limit the application of fertilizers, chemicals, or animal wastes. It should be notedthat the Aactual@ rates reported by the application controller are often not based on flowmeasurements of the product applied, but rather on the rotational speed of some shaft in the productmetering system. A constant calibration between shaft speed and product delivery is then assumed. This assumption is sufficient in most cases, but may not be accurate if the equipment is notfunctioning as designed. A few VRT systems do incorporate flowmeters to quantify the actualproduct flow rate, such as the manure application system described by Ess et al. (1996).
Application Rate Processor
The application rate processor and associated software are at the center of the VRT system. Here,position, velocity, and on-board sensor data are combined with the desired application rate map andrate commands are sent to the application rate controller. Currently available systems range fromcomplete hardware/software packages to stand-alone software that runs on a standard Dos- orWindows-based portable computer.
Many current VRT systems combine the application rate processor, application controller, andoperator interface into one box located in the cab. Specialized wiring harnesses connect thismultifunction box with actuators and sensors. In other systems, the interface and application rateprocessor are combined and communicate with a separate controller. In this way the applicationcontroller may be optimized for the specific control task, often requiring just the addition of themeans to input a time-varying digital set-point to a manufacturer=s existing single-rate controller. Dueto the ability to use an already proven controller, this split-system approach may provide a higherdegree of confidence in the Ainner-loop@ portion of the control system and can allow the operator toeasily revert to the familiar manual, single-rate controller if problems are encountered with otherportions of the system. However, the added complexity involved may increase cost and decreaseusability of the system, due to the need to maintain two separate electronic boxes.
The selection of application rate processor hardware and/or software is a very importantconsideration in the development of a good VRT system. As this is still a relatively immatureindustry, there is considerable variability from manufacturer to manufacturer in terms of functionality,ease of use, and end-user support. For example, many VRT application rate processors were firstimplemented on large commercial fertilizer application vehicles, which often cover a swath of 20 mor wider. Because of this, assumptions made in the development of the operating software may makeit difficult to use the system for controlling other types or sizes of application equipment, which mayinvolve significantly different product flow rates or may cover only a 5 m or smaller swath. Withmany manufacturers offering application rate processors, the user should understand the needs of his

11
system, both now and in the future, and carefully consider the possible alternatives.
A desirable feature in a rate processor is the ability to compensate for application system delays.Transient errors in VRT application rates can be caused by the time delay between the application rateprocessor issuing a rate change and the application system actually delivering product at that rate. For example, Rudolph and Searcy (1994) reported on a situation where an injection sprayer traveledover 150 m at normal field speeds before the commanded final application rate was obtained. Theyfurther reported that the lag could be reduced to about 22 m by optimizing the sprayer for VRT use. Lags will vary for different types and designs of application equipment and for different operatingconditions, but in many cases these lags will cause significant areas of misapplication within a field. Compensation for this problem involves estimating where the applicator will be in the field at thetime the commanded product delivery rate is realized (Rudolph and Searcy, 1994).
Application Controller
The application controller receives set point information from the application rate processor and thencontrols the actuators on the application device. In general, the controllers used in VRT equipmentimplement closed-loop control. In closed-loop control, a feedback signal proportional to the actualapplication rate is compared with the desired application rate, and the resulting rate error is used toadjust the control signal, such that the error is minimized. The means by which this adjustment iscarried out will vary from case to case and is beyond the scope of this article. The reader is referredto a basic text in automatic control theory, such as Kuo (1987).
Commercial VRT equipment may use either a centralized or a distributed control system architecture. In the centralized system, a single controller resides in the cab of the vehicle, with dedicated wiringrunning to each of the sensors and actuators in the system. Examples of this approach would includededicated spray rate or planting rate controllers. With the distributed architecture, a single interfaceconsole in the applicator cab communicates with a network of digital controllers, each of whichmonitors and controls one or a few processes. This approach is gaining favor as more and moreprocesses are being controlled on agricultural vehicles. The distributed control system is moreflexible, simpler to maintain, and often less expensive than providing several dedicated controller/display units in the cab. A number of VRT equipment companies have implemented proprietarydistributed control systems, as described by Anderson and Humburg (1997).
In order to promote component interchangeability and to allow implements from one manufacturerto function with vehicles made by another company, a number of members of the agriculturalequipment industry have worked together to develop standard electronics communication protocolsfor mobile equipment. Stone and Zachos (1993) described the application of this J1939/ISO11783vehicle network standard to agricultural equipment. This standard provides support for precisionagriculture-related message information to be transferred along the data bus, in addition to the moreconventional equipment operating messages. The potential adoption of this standard bymanufacturers of agricultural equipment has important implications for developers of VRT systems.A more detailed functional description of the J1939 standard is given by Anderson and Humburg(1997).

12
Operator Interface
The operator interface is an important part of the overall VRT system. It must effectivelycommunicate complex and rapidly changing information to the driver, particularly in the case ofsimultaneous multiple-product application. It must also provide an efficient means for the operatorto interact with the VRT system to change operating parameters, override default settings, or fix faultconditions that may be detected. Today, a combination of audible alarms, numeric readouts, andgraphical displays are used to provide information to the operator. Data entry is generallyaccomplished through a keyboard or touchscreen interface. Some manufacturers have implementedcolor graphic displays to more efficiently communicate data with the operator.
Future adoption of the J1939 standard described above will provide for a single Avirtual terminal@interface in the cab of the vehicle. All devices on the vehicle network will use this physical interfacefor communicating with the operator. This includes vehicle-specific devices such as engine sensors(oil pressure, temperature, etc.) as well as application controllers. Multiple devices will be able topresent information to the operator at once through multiple panels in the virtual terminal (Stone andZachos, 1993). Once implemented, this approach should greatly simplify the operator=s interactionwith the VRT and vehicle systems.
Equipment Actuators
Most site-specific application devices are driven by hydraulic or electric motors. Liquid fertilizersand chemicals are pumped through a hose, crop seed is singulated by a rotating drum or disk, andgranular fertilizers and chemicals are metered from a holding tank for broadcast or bandedapplications. A feedback signal proportional to actuator motor speed is input to the applicationcontroller to allow for closed loop control. The specific ways that actuators are incorporated intodelivery systems are constantly changing as new VRT equipment comes onto the market. Examplesof recent commercial VRT equipment available in the U.S. are given by Anderson and Humburg(1997) and Morgan and Ess (1997).
Accuracy Considerations
Application accuracy is important in any system, but becomes even more important with VRT. Reliable changes in application rate can only be delivered by a system having an accuracy considerablybetter than the minimum level of the required rate change increments. Proper attention to issues suchas delivery system calibration, nozzle-to-nozzle uniformity, and proper equipment operation isessential in providing good VRT application. To aid in testing and reporting equipment uniformity,engineers have developed standards such as ASAE S341.2, AProcedure for measuring distributionuniformity and calibrating granular broadcast spreaders@ (ASAE, 1996). New and revised standardsfocused on VRT applicators have been proposed (Chaplin et al., 1995; Humburg and Monson, 1997). Continued development and refinement of standards for products and for test procedures will beimportant for VRT equipment.

13
FUTURE NEEDS AND DIRECTIONS
Precision agriculture is bringing the information age to the farm. Like the earlier introductions oftractor power and mechanization, and chemical fertilizers and pesticides, the application ofinformation technology to crop management will significantly change methods of production andimprove the efficiency of the production system. The agricultural community=s level of interest inprecision agriculture will continue to grow. Farm equipment manufacturers will introduce new andimproved machines which can vary the application rates of seeds, water, fertilizers, and pesticides inresponse to precision management plans. Yield monitors and other sensor systems will improve andincrease in number. High-resolution satellite images designed specifically for precision agriculturemay become available in the near future. Many more producers will investigate the use of thesemachines and services, and will apply precision farming techniques to manage their crop production.
Precision farming offers the potential to improve production efficiencies and at the same time reduceagriculture=s impact on the environment. To realize the full benefits of this potential will requireanswering a number of questions and challenges. Although precision farming is intuitively perceivedto be more efficient in its use of crop production inputs, documentation of the economic andenvironmental benefits is incomplete. Currently available databases do not adequately represent therequired range of climate and site variations to understand the within-field relationship of yields toyield-limiting factors. The problem of data overload is being faced by growers, crop consultants, andresearchers. Although GIS technology is being used to manage the reams of data which precisionfarming generates, more advanced systems which also provide decision support are needed. Formaximum benefit, these decision support systems will require agronomic knowledge at a level ofdetail specifically tailored to the precision agriculture approach.
Engineering technologies such as GPS, variable rate application systems, close-range and remotesensing systems, and yield mapping systems have a significant role in making the agronomic principlesembodied in precision farming feasible. Additional developments in these areas will be important inenabling the future adoption of newer, improved approaches. For maximum effectiveness in thedevelopment of integrated precision farming systems, it is important to take an interdisciplinary teamapproach, including engineers, agricultural scientists, agribusiness and industry representatives, andproducers. Through the efforts of such teams it will be possible to develop the precision productionsystems and supporting technologies that will be required as precision farming moves into the nextcentury.
REFERENCES
Anderson, N.W. and D.S. Humburg. 1997. Application equipment for site-specific management. In:The State of Site-Specific Management for Agriculture, pp. 245-281. ASA, CSSA, SSSA, Madison,WI.
ASAE. 1996. Procedure for measuring distribution uniformity and calibrating granular broadcastspreaders. Standard S341.2. ASAE, St. Joseph, MI.

14
Biller , R.H. 1998. Reduced input of herbicides by use of optoelectronic sensors. Journal ofAgricultural Engineering Research 71: 357-362.
Birrell , S.J., K.A. Sudduth, and S.C. Borgelt.1996. Comparison of sensors and techniques for cropyield mapping. Computers and Electronics in Agriculture 14:215-233.
Chaplin , J., E. Roytburg, and J. Kaplan. 1995. Measuring the spatial performance of chemicalapplicators. In: Site-specific Management for Agricultural Systems. Proc. 2nd Intl. Conf., pp. 651-669. ASA, CSSA, SSSA, Madison, WI.
Clark, R.L. and R. Lee. 1998. Development of topographic maps for precision farming with kinematicGPS. Transactions of the ASAE 41(4): 909-916.
Doolittle, J.A., K.A. Sudduth, N.R. Kitchen, and S.J. Indorante. 1994. Estimating depths to claypansusing electromagnetic induction methods. Journal of Soil and Water Conservation. 49(6): 572-575.Ess, D.R., B.C. Joern, and S.C. Hawkins. 1996. Development of a precision application system forliquid animal manures. In: Proc. 3rd Intl. Conf. on Precision Agriculture, pp. 863-870. ASA, CSSA,SSSA, Madison, WI.
Fraisse, C.W., K.A. Sudduth, and N.R. Kitchen. 1998. GIS-based integrated modeling systems forsite-specific crop management. Paper 981114. ASAE, St. Joseph, MI.
Frazier, B.E., C.S. Walters and E.M. Perry. 1997. Role of remote sensing in site-specificmanagement. In: The State of Site-Specific Management for Agriculture, pp 149-160. ASA, CSSA,SSSA, Madison, WI.
Han, S., S.M. Schneider, S.L. Rawlins, and R.G. Evans. 1997. A bitmap method for determiningeffective combine cut width in yield mapping. Transactions of the ASAE 40(2): 485-490.
Hoogenboom, G., H. Lal, and D.D. Gresham. 1993. Spatial yield prediction. Paper No. 933550.ASAE, St. Joseph, MI.
Humburg, D. and R.J. Monson. 1997. A methodology for quantifying the capabilities of site-specificfertilizer applicators. Paper No. 971042, ASAE, St. Joseph, MI.
Hummel, J.W., L.D. Gaultney, and K.A. Sudduth. 1996. Soil property sensing for site-specific cropmanagement. Computers and Electronics in Agriculture 14:121-136.
Kitchen, N.R., K.A. Sudduth, and S.T. Drummond. 1997. Electromagnetic induction as a soilproductivity index. In: Abstracts of First European Conference on Precision Agriculture, WarwickUniv. Conf. Centre, UK, Sept. 8-10, 1997. SCI, London, UK.
Krishnan, P., B.J. Butler, and J.W. Hummel. 1981. Close-range sensing of soil organic matter.Transactions of the ASAE 24(2): 306-311.
Kuo, B.C. 1987. Automatic Control Systems. Fifth Edition. Prentice-Hall, Inc., Englewood Cliffs,

15
NJ.
Linsley , C.M. and F.C. Bauer. 1929. Test your soil for acidity. Circular 346. College of Agricultureand Agricultural Experiment Station, University of Illinois, Champaign, IL.
Morgan, M.T. and D.R. Ess. 1997. The Precision Farming Guide for Agriculturalists. John DeerePublishing, Moline, IL.
Ortlip, E.W. 1986. Method and apparatus for spreading fertilizer. U.S. Patent No. 4,630,773.
Pierce, F.J., N.W. Anderson, T.S. Colvin, J.K. Schueller, D.S. Humburg, and N.B. McLaughlin.1997. Yield mapping. In: The State of Site-Specific Management for Agriculture, pp. 211-244. ASA,CSSA, SSSA, Madison, WI.
Rudolph, W.W. 1983. Controlled application. In: Agricultural Electronics B 1983 and Beyond,Volume 1, pp. 91-98. ASAE, St. Joseph, MI.
Rudolph, W.W. and S.W. Searcy. 1994. Strategies for prescription application using the chemicalinjection control system with computer commanded rate changes. Paper No. 941585. ASAE, St.Joseph, MI.
Searcy, S.W. 1995. Engineering systems for site-specific management: opportunities and limitations.In: Site-specific Management for Agricultural Systems. Proc. 2nd Intl. Conf., pp. 603-612. ASA,CSSA, SSSA, Madison, WI.
Stone M.L. and M. Zachos. 1993. Application of J1939 networks in agricultural equipment. PaperNo. 931530. ASAE, St. Joseph, MI.
Sudduth, K.A., S.T. Drummond, S.J. Birrell , and N.R. Kitchen. 1996. Analysis of spatial factorsinfluencing crop yield. In: Proc. 3rd Intl. Conf. on Precision Agriculture, pp. 129-140. ASA, CSSA,SSSA, Madison, WI.
Sudduth, K.A., J.W. Hummel, and S.J. Birrell . 1997. Sensors for site-specific management. In: TheState of Site-Specific Management for Agriculture, pp. 183-210. ASA, CSSA, SSSA, Madison, WI.
Sudduth, K.A., S.T. Drummond, W. Wang, M.J. Krumpelman, and C.W. Fraisse. 1998. Ultrasonicand GPS measurement of combine swath width. Paper No. 983096. ASAE, St. Joseph, MI.
Tyler, D.A., D.W. Roberts, and G.A. Nielsen. 1997. Location and guidance for site-specificmanagement. In: The State of Site-Specific Management for Agriculture, pp. 161-181. ASA, CSSA,SSSA, Madison, WI.
van Bergeijk, J., D. Goense, K.J. Keesman, and L. Speelman. 1998. Digital filters to integrate globalpositioning system and dead reckoning. Journal of Agricultural Engineering Research 70:135-143.
Vanotti, M.B., and L.G. Bundy. 1994. Corn nitrogen recommendations based on yield response data.

16
Journal of Production Agriculture 7:249-256.


















