en31 intro lect - Brown University
41
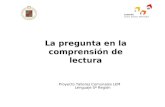
Kinematics Deformation Mapping Eulerian/Lagrangian descriptions of motion Deformation Gradient x u(x) e 3 e 1 e 2 Original Configuration Deformed Configuration y 1 2 3 ( , , ,) i i i y x u x x x t = + const ( ,) ( ,) i i i i i i j i j x y u y x u x t v x t t t = ∂ ∂ = + = = ∂ ∂ 2 2 const const ( ,) ( ,) ( ,) i i i i i i i j i j i j x x y y y x u y t v y t a y t t t = = ∂ ∂ = + = = ∂ ∂ 2 2 const const const const ( ,) ( ,) i i i i i k i i i i ik i j k j k k y y x x u y u y v v a y t v y t y t t t y t δ = = = = ∂ ∂ ∂ ∂ ∂ ∂ − = = = + ∂ ∂ ∂ ∂ ∂ ∂ ( ) ( ) () or i i i i ij ij j j j y u x u F x x x δ ∇ =∇ + = ∂ ∂ ∂ = + = + = ∂ ∂ ∂ y x ux F x u(x) e 3 e 1 e 2 dx dy u(x+dx) Original Configuration Deformed Configuration i ik k d d dy F dx = ⋅ = y F x
Transcript of en31 intro lect - Brown University
en31 intro lecty
1 2 3( , , , )i i iy x u x x x t= +
const ( , ) ( , )
i
x
∂ ∂ = + = =
i i i i i j i j i j
x x
∂ ∂ = + = =
∂ ∂
( , ) ( , ) i ii i
i k i i i i ik i j k j
k ky yx x
u y u y v va y t v y t y t t t yt
δ = == =
j j j
δ
x u(x)
= ⋅ =
After second deformation
(2) (1)(2) (1)with or i ij j ij ik kjd d dz F dx F F F= ⋅ = ⋅ = =z F x F F F
Lagrange Strain
1 1( ) or ( ) 2 2
T ij ki kj ijE F F δ= ⋅ − = −E F F I
( )22 2 0 2 200 02 2
ij i j ll l lE m m
ll l
Area Elements 1 0 0 0 0
T i ki kdA J dA dAn JF n dA− −= ⋅ =n F n
( )( )1 1or 2 2
j i j i j i
u uu u u uE x x x x x x
ε ∂ ∂∂ ∂ ∂ ∂
22
e3
e1
e2
e
i ij ij
∂
Left and Right stretch tensors, rotation tensor = ⋅F R U = ⋅F V R
(1) (1) (2) (2) (3) (3) 1 2 3λ λ λ= ⊗ + ⊗ + ⊗U u u u u u u
(1) (1) (2) (2) (3) (3) 1 2 3λ λ λ= ⊗ + ⊗ + ⊗V v v v v v v
U,V symmetric, so
iλ principal stretches
2
T
T
* 1 * 1 11 1( ) or ( ) 2 2
T ij ij ki kjE F Fδ− − − −= − ⋅ = −E I F FEulerian strain
Kinematics
j
∂ = + − =
y
1 i ij jk kdv F F dy−= ( )i i ij j ij j
d ddv dy F dx F dx dt dt
= = =
T T= + = −D L L W L L
e3
e1
l dt = ⋅ ⋅ =n D n
Vorticity vector ( ) k i ijk
j
1 ( ) 2 2
ix const y const
∂ ∂ ∂ = = + +
∂ ∂ ∂
ix const y const
ω = =
j kconst
ω ω ω
e3
e1
e2
e1
e3
e2
T(n)
n
T(-e1)
-e1
dA1
dA(n)
T(-n)( ) ( )− = −T n T nNewton II
( ) or ( )i j jiT n σ= ⋅ =T n n σ n
Newton II&III
Cauchy Stress Tensor
e3
e1
e2
1 1 ij ik kjJ JFS σ− −= ⋅ =S F σ
1 1 1T ij ik kl jlJ JF Fσ− − − −= ⋅ =⋅Σ F Fσ Σ
( ) 0 0 i ijjdP dA n S=n
e3
e1
e2
( 0) ( ) ij j iF dP dP=n n ( 0) 0
0 j jiidP dA n= Σn
Reynolds Transport Relation
v vd dV dV dV dt t y t y
φφ φφ φ = =
= =
∂ ∂∂ ∂ + = ⇒ + =
∂ ∂ ∂ ∂ ∫
( ) 1 2i i i ij ij i ii
A V V V
dr T v dA b v dV D dV v v dV dt
ρ σ ρ = + = +
e3
e1
e2
0 0 0 0 ij
j j i
S b a
∂ S b a ( )
j j i
F b a
∂ Σ ∇ ⋅ ⋅ + = + = ∂
0 0
A V V V
dr T v dA b v dV S F dV v v dV dt
ρ ρ = + = +
A V V V
dr T v dA b v dV E dV v v dV dt
ρ ρ = + = Σ +
V
dvD dV dA dt
V V S dV v b v dV t vδσ ρ δ ρ δ δ =+ − −∫ ∫ ∫ ∫
Principle of Virtual Work (alternative statement of BLM)
1 2
δδ δδ δ ∂∂ ∂
ε
Thermodynamics
e3
e1
e2
S0 b
t Specific Internal Energy Specific Helmholtz free energy sψ ε θ= −
Temperature θ
First Law of Thermodynamics ( )d KE Q W dt
Ε + = +
=
∂∂ = − +
Η − ≥
D q s y t t θ ψ θσ ρ
θ ∂ ∂ ∂ − − + ≥ ∂ ∂ ∂ Dissipation Inequality
Transformations under observer changes Transformation of space under a change of observer
e3
e1
e2
* * 0 0( ) ( )( )t t= + −y y Q y y
All physically measurable vectors can be regarded as connecting two points in the inertial frame
These must therefore transform like vectors connecting two points under a change of observer
* * * *= = = =b Qb n Qn v Qv a Qa
Note that time derivatives in the observer’s reference frame have to account for rotation of the reference frame
** * * * * *0
0 02 2 2 2
( ( )) ( ( ))
dd d dt t dt dt dt dt
= = = − = − − −
= = = − = − + − − − −
yy yv Qv Q Q Q y y Ω y y
y yy y Ω ya Qa Q Q Q y y Ω y y Ω
Td dt
= QΩ Q
Inertial frame
Observer frame
Objective (frame indifferent) tensors: map a vector from the observed (inertial) frame back onto the inertial frame
= ⋅t n σ
* *T T= =σ QσQ D QDQ
Invariant tensors: map a vector from the reference configuration back onto the reference configuration
0 = ⋅T m Σ
* =Σ Σ
Mixed tensors: map a vector from the reference configuration onto the inertial frame
d d=y F x * =F QF
Some Transformations under observer changes
The deformation mapping transforms as ( )* * 0 0( , ) ( ) ( ) ( , )t t t t= + −y X y Q y X y
The deformation gradient transforms as *
* ∂ ∂ = = =
∂ ∂ y yF Q QF X X
The right Cauchy Green strain Lagrange strain, the right stretch tensor are invariant * * * * *T T T= = = = =C F F F Q QF C E E U U
The left Cauchy Green strain, Eulerian strain, left stretch tensor are frame indifferent * * * *T T T T T= = = =B F F QFF Q QCQ V QVQ
The velocity gradient and spin tensor transform as
( )* * * 1 1
W L L QWQ Ω
* * * * *0 0 0
0 02 2 2 2
( ( )) ( ( ))
dd d dt t dt dt dt dt
= = = − = − − −
= = = − = − + − − − −
yy yv Qv Q Q Q y y Ω y y
y yy y Ω ya Qa Q Q Q y y Ω y y Ω
(the additional terms in the acceleration can be interpreted as the centripetal and coriolis accelerations) The Cauchy stress is frame indifferent * T=σ QσQ (you can see this from the formal definition, or use
the fact that the virtual power must be invariant under a frame change) The material stress is frame invariant * =Σ Σ The nominal stress transforms as * 1 1( ) T T TJ J− −= ⋅ = ⋅ =S QF Q Q F Q SQσ σ (note that this
transformation rule will differ if the nominal stress is defined as the transpose of the measure used here…)
Some Transformations under observer changes
The deformation mapping transforms as
The deformation gradient transforms as
The right Cauchy Green strain Lagrange strain, the right stretch tensor are invariant
The left Cauchy Green strain, Eulerian strain, left stretch tensor are frame indifferent
The velocity gradient and spin tensor transform as
The velocity and acceleration vectors transform as
(the additional terms in the acceleration can be interpreted as the centripetal and coriolis accelerations)
The Cauchy stress is frame indifferent (you can see this from the formal definition, or use the fact that the virtual power must be invariant under a frame change)
The material stress is frame invariant
*
*
¶¶
===
¶¶
Constitutive Laws
General Assumptions: 1. Local homogeneity of deformation (a deformation gradient can always be calculated) 2. Principle of local action (stress at a point depends on deformation in a vanishingly small material element surrounding the point) Restrictions on constitutive relations: 1. Material Frame Indifference – stress-strain relations must transform consistently under a change of observer 2. Constitutive law must always satisfy the second law of thermodynamics for any possible deformation/temperature history.
Equations relating internal force measures to deformation measures are known as Constitutive Relations
e3
e1
e2
D q s y t t θ ψ θσ ρ
θ ∂ ∂ ∂ − − + ≥ ∂ ∂ ∂
Fluids
Properties of fluids • No natural reference configuration • Support no shear stress when at rest
Kinematics
• Only need variables that don’t depend on ref. config
Conservation Laws
∂ =
∂ ( ) / 2 ( ) / 2ij ij ij ij ij ji ij ij jiL D W D L L W L L= + = + = − k
i ijk ijk ij j
v W y
k i i i
k
i i k i i i i ik k ik ik k
kx const y const y const y const
i k k ik k k k ijk j k
i iy const
v v y v v va L v D W v t y t t t t
vv v W v v v v y t y
ω
j k y const
ρ ρ σ σ =
=
∂∂ = − +
D q s y t t θ ψ θσ ρ
θ ∂ ∂ ∂ − − + ≥ ∂ ∂ ∂
Objectivity and dissipation inequality show that constitutive relations must have form
Internal Energy Entropy Free Energy Stress response function Heat flux response function
ˆ( , )ε ε ρ θ= ˆ( , )s s ρ θ=
ˆ ( , ) sψ ψ ρ θ ε θ= = −
ˆ ˆ ˆ( , , ) ( , ) ( , , )vis ij ij ij eq ij ij ijD Dσ σ θ ρ π ρ θ δ σ ρ θ= = − +
ˆ , , ,i i ij i
q q D y θθ ρ
∂ = ∂
2
π π ερ π θ ρ θ ρ θ ρ
πψ θθ ρθ ρ θ
∂ ∂ = = −
∂ ∂ ∂ ∂∂ ∂
= − = + ∂ ∂ ∂ ∂
∂∂∂ = − = −
ij ij ij i i i
∂ ∂ ≥ ≥ ∂ ∂
Constitutive Models for Fluids
ˆ ( ) ( )ij eq ijψ ψ ρ σ π ρ δ= =−Elastic Fluid
( )0log log ( 1)v v v ij ij ij
pc c c R s p Rε θ ψ θ θ θ ρ σ δ ρ θδ γ ρ
= = = − − − = − = − −Ideal Gas
ˆ ( , ) ( ( , ) ( , ) ) 2 ( , )( / 3)ij eq kk ij ij kk ijD D Dψ ψ ρ θ σ π ρ θ κ ρ θ δ η ρ θ δ= =− − + −Newtonian Viscous
1 1 2 3 2 1 2 3 3 1 2 3
ˆ ( , ) ( , ) ( , , , , ) ( , , , , ) ( , , , , )ij eq ij ij ij ik kjI I I I I I D I I I D D
ψ ψ ρ θ σ π ρ θ δ η ρ θ δ η ρ θ η ρ θ
= =− + + +Non-Newtonian
ˆ ˆ ˆ( , , ) ( , ) ( , , )vis ij ij ij eq ij ij ijD Dσ σ θ ρ π ρ θ δ σ ρ θ= = − +ˆ ( , ) sψ ψ ρ θ ε θ= = −
Derived Field Equations for Newtonian Fluids
1 ( ) 2
i k
ji i i i i i i k k k ijk j k
j k iy const y const
v v vb a a v v v v y y t t y σ
ρ ρ ω = =
∂ ∂ ∂ ∂ ∂ Combine BLM With constitutive law. Also recall
Compressible Navier-Stokes ( )2 ( , ) / 3 ( , ) ( , )ij kk ij i i eq kk i j
p D D b a p D y y
∂ ∂
vv b a y y y y y
π η κ η ρ ρ ρ ρ
∂ ∂∂ − + + − + = ∂ ∂ ∂ ∂ ∂
i iy const
π ρ ρ ρ ρ ω
=
∂ ∂ ∂ − + = + + ∈
21 i i i
η ρ ρ
1 2
ji ij
j i
0 or 0i kk
Unknowns: , ip v
2 2 2
2 1 2 ( )
3 i k l k i
ijk ijk k ij j i j j j l l l k j k const
v v vb D y y y y y y y y y t
ω ωη ρ ηη κ ω ω ρ ρ =
∂ ∂ ∂ ∂ ∂∂ ∂ + − ∈ + − + ∈ + − = ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ x
For an elastic fluid
j
j k const
ω ω ω
b D y y x t
ω ωη ω ρ =
k i k ijk ij j i
j kconst
ω ω ω
∂ ∂ ∂x
If flow of an ideal fluid is irrotational at t=0 and body forces are curl free, then flow remains irrotational for all time (Potential flow)
Derived field equations for fluids
• Bernoulli 1 constant 2
π ψ
eq i iH v v
π ψ
p v v ρ
B
R
Example
j i
Steady 2D flow, ideal fluid Calculate the force acting on the wall Take surrounding pressure to be zero
( ) B R R B
ρ ρ ρ⋅ + = + ⋅∫ ∫ ∫ ∫n σ b v v v n
3
A A
p dA A v p p dAρ α− ⋅ − + − =∫ ∫n j j j j
2 0 0 0 sinA vρ α= −F j
Exact solutions: potential flow
p v v tρ
∂
If flow irrotational at t=0, remains irrotational; Bernoulli holds everywhere
Irrotational: curl(v)=0 so i i
v y
V
e1
e2
a
2
2 ( ) ( )( )a V y V t r y V t y V t
r α α α
α α α α −
Exact solutions: Stokes Flow
y1
h
Steady laminar viscous flow between plates Assume constant pressure gradient in horizontal direction
2 2 2 1
V p h y h L
η
v vp p fb y y v t L y
η η ρ ρ =
Exact Solutions: Acoustics Assumptions: Small amplitude pressure and density fluctuations Irrotational flow Negligible heat flow Neglect body forces
Mass conservation:
δρ∂ ∂ =
ρ =
i
iconst
θ =
∂ ∂x Entropy equation:
( )0log logv v vc c c R s p Rε θ ψ θ θ θ ρ ρ θ= = − − + =
( ) / 0 0log log exp[( ) / )vR c
v vs c R s s s cθ ρ θ ρ= − + ⇒ = −
Hence:
1 s
s const
−
=
∂ = = = =
∂
Application of continuum mechanics to elasticity
e3
e1
e2
e3
e1
e2
1 1 ij ik kjJ JFS σ− −= ⋅ =S F σ
1 1 1T ij ik kl jlJ JF Fσ− − − −= ⋅ =⋅Σ F Fσ Σ
0 0 i
ji i i
j x const
i C Q s
θ ∂ ∂ ∂ Σ − − + ≥ ∂ ∂ ∂
( ) ( ) 1
2 3
kk
I J
=
J
B
1 2 3 1 2 1 2 3ˆ( ) ( ) ( , , ) ( , , ) ( , , )W W U I I I U I I J U λ λ λ= = = =F C
• Strain energy potential 0W ρ ψ=
1 ij ik
1 3 1 2 2 33
2 2ij ij ik kj ij U U U UI B B B I I I I II
σ δ ∂ ∂ ∂ ∂
1 1 22 /3 4 /31 2 1 2 2
2 1 12 3 ij
ij ij ik kj ij U U U U U UI B I I B B
J I I I I I JJ J
δ σ δ
(1) (1) (2) (2) (3) (3)31 2
1 2 3 1 1 2 3 2 1 2 3 3 ij i j i j i j
U U Ub b b b b bλλ λ σ
= + + ∂ ∂ ∂
2 (1) (1) 2 (2) (2) 2 (3) (3) 1 2 3λ λ λ= ⊗ + ⊗ + ⊗B b b b b b b
Specific forms for free energy function
• Neo-Hookean material 21 1
KU I Jµ = − + −
2 2 2 KU I I Jµ µ
= − + − + −
1 1 3ij ij kk ij ijB B K J
J µ
( )21 2 15/3 7 /3
1 1 1[ ] 1 3 3 3ij ij kk ij kk ij kk ij ik kj kn nk ij ijB B B B B B B B B K J
J J µ µ
• Generalized polynomial function 2 1 2
1 1 ( 3) ( 3) ( 1)
2
ij i j i
= − − + −∑ ∑
α= = + + − + −∑• Ogden
1 1 11( 3) ( 9) ( 27) ... 1 2 220 1050
KU I I I Jµ β β
= − + − + − + + −
rθ
φ
eR
e3
φ
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
rr rr rrF B F B
F B θθ θθ θθ
φφ φφ φφ
2 2
= = = = = =
21 2 1
21 2 1
22 3 3
22 3 3
rr rr rr I IU U U U UI B B p
I I I I I
I IU U U U UI B B p I I I I Iθθ φφ θθ θθ
σ
( ) 0 1 2 0rr
rr r d b
dr r θθ φφ σ σ σ σ ρ+ − − + =• Equilibrium (or use PVW)
( ) ( )r a r bu a g u b g= =
(gives ODE for p(r)
• Boundary conditions
2
2
j i i
u uu C b x x x t
u u t R n t t R
σ ε σ ε α θ ρ ρ
σ
kl ij kl ij
U UC σ σ
∂ ∂∂ ∂ = = = =
Approximations: • Linearized kinematics • All stress measures equal • Linearize stress-strain relation
1 ij ij kk ij ijT
E E ν νε σ σ δ α δ+
= − + 1 1 2 1 2ij ij kk ij ij
= + − + − −
Solving linear elasticity problems spherical/axial symmetry
R θ
e3
φ
0 0 0 0 0 0 0 0 0 0 0 0
RR RR
θθ θθ
φφ φφ
σ ε
du E E TdR
−
= − + − −
σ σ σ ρ+ − − + =
02 2 2 1 1 1 22 2 1 ( )
1 1 d u du u d d d TR u b R
R dR dR dR dR EdR R R
α ν ν ν ρ
ν ν + + −
( ) ( )rr a rr ba t b tσ σ= =
• Boundary conditions
2
(1 ) (3 4 ) 8 (1 )
3(1 ) (1 2 ) 8 (1 )
31 (1 2 ) 8 (1 )
k k i i i
k k i j k k ij i j j i ij
k k i j i j j i ij k k ij
P x xu P E R R
P x x x P x P x P x R RE R R
P x x x P x P x P x RR R
ν ν π ν
δνε ν π ν
Point force normal to a surface:
e1
P
e3
i R x R
− − − Ψ = = − +
i i i i i
x x xPu E R R x RR
δν νν δ π
( )( ) ( ) 23 23
3 3 3 3 3 32 3 2 2 3 3
(1 2 )(2 ) (1 2 )3 2 ( ) ( )
i j ij i j ij i j j i i j ij
x x x R xP Rx x x x x x R R R R x R x
ν νσ δ δ δ δ δ δ π
− + − = − + + − + + − + +
k i k k
ρ ρ
i u x
2 2 0 0
i i i i
x x x x φρ ρ
∂ Ψ ∂ = − = −
Dynamic elasticity solutions
( )i i k ku a f ct x p= −Plane wave solution
2 2 2 0
k i k k
ρ ρ
( )2 0 0
− + = −
2 2 2 00 /i ia p c c ρ µ= ⇒ = =Solutions:
2 2 02 (1 ) / (1 2 )i i La p c cη µ ν ρ ν= ⇒ = = − −
Kinematics
Slide Number 23
Slide Number 25
Governing equations for a control volume (review)
Example
General structure of constitutive relations
Forms of constitutive relation used in literature
Specific forms for free energy function
Solving problems for elastic materials (spherical/axial symmetry)
Linearized field equations for elastic materials
Solving linear elasticity problems spherical/axial symmetry
Some simple static linear elasticity solutions
Dynamic elasticity solutions
1 2 3( , , , )i i iy x u x x x t= +
const ( , ) ( , )
i
x
∂ ∂ = + = =
i i i i i j i j i j
x x
∂ ∂ = + = =
∂ ∂
( , ) ( , ) i ii i
i k i i i i ik i j k j
k ky yx x
u y u y v va y t v y t y t t t yt
δ = == =
j j j
δ
x u(x)
= ⋅ =
After second deformation
(2) (1)(2) (1)with or i ij j ij ik kjd d dz F dx F F F= ⋅ = ⋅ = =z F x F F F
Lagrange Strain
1 1( ) or ( ) 2 2
T ij ki kj ijE F F δ= ⋅ − = −E F F I
( )22 2 0 2 200 02 2
ij i j ll l lE m m
ll l
Area Elements 1 0 0 0 0
T i ki kdA J dA dAn JF n dA− −= ⋅ =n F n
( )( )1 1or 2 2
j i j i j i
u uu u u uE x x x x x x
ε ∂ ∂∂ ∂ ∂ ∂
22
e3
e1
e2
e
i ij ij
∂
Left and Right stretch tensors, rotation tensor = ⋅F R U = ⋅F V R
(1) (1) (2) (2) (3) (3) 1 2 3λ λ λ= ⊗ + ⊗ + ⊗U u u u u u u
(1) (1) (2) (2) (3) (3) 1 2 3λ λ λ= ⊗ + ⊗ + ⊗V v v v v v v
U,V symmetric, so
iλ principal stretches
2
T
T
* 1 * 1 11 1( ) or ( ) 2 2
T ij ij ki kjE F Fδ− − − −= − ⋅ = −E I F FEulerian strain
Kinematics
j
∂ = + − =
y
1 i ij jk kdv F F dy−= ( )i i ij j ij j
d ddv dy F dx F dx dt dt
= = =
T T= + = −D L L W L L
e3
e1
l dt = ⋅ ⋅ =n D n
Vorticity vector ( ) k i ijk
j
1 ( ) 2 2
ix const y const
∂ ∂ ∂ = = + +
∂ ∂ ∂
ix const y const
ω = =
j kconst
ω ω ω
e3
e1
e2
e1
e3
e2
T(n)
n
T(-e1)
-e1
dA1
dA(n)
T(-n)( ) ( )− = −T n T nNewton II
( ) or ( )i j jiT n σ= ⋅ =T n n σ n
Newton II&III
Cauchy Stress Tensor
e3
e1
e2
1 1 ij ik kjJ JFS σ− −= ⋅ =S F σ
1 1 1T ij ik kl jlJ JF Fσ− − − −= ⋅ =⋅Σ F Fσ Σ
( ) 0 0 i ijjdP dA n S=n
e3
e1
e2
( 0) ( ) ij j iF dP dP=n n ( 0) 0
0 j jiidP dA n= Σn
Reynolds Transport Relation
v vd dV dV dV dt t y t y
φφ φφ φ = =
= =
∂ ∂∂ ∂ + = ⇒ + =
∂ ∂ ∂ ∂ ∫
( ) 1 2i i i ij ij i ii
A V V V
dr T v dA b v dV D dV v v dV dt
ρ σ ρ = + = +
e3
e1
e2
0 0 0 0 ij
j j i
S b a
∂ S b a ( )
j j i
F b a
∂ Σ ∇ ⋅ ⋅ + = + = ∂
0 0
A V V V
dr T v dA b v dV S F dV v v dV dt
ρ ρ = + = +
A V V V
dr T v dA b v dV E dV v v dV dt
ρ ρ = + = Σ +
V
dvD dV dA dt
V V S dV v b v dV t vδσ ρ δ ρ δ δ =+ − −∫ ∫ ∫ ∫
Principle of Virtual Work (alternative statement of BLM)
1 2
δδ δδ δ ∂∂ ∂
ε
Thermodynamics
e3
e1
e2
S0 b
t Specific Internal Energy Specific Helmholtz free energy sψ ε θ= −
Temperature θ
First Law of Thermodynamics ( )d KE Q W dt
Ε + = +
=
∂∂ = − +
Η − ≥
D q s y t t θ ψ θσ ρ
θ ∂ ∂ ∂ − − + ≥ ∂ ∂ ∂ Dissipation Inequality
Transformations under observer changes Transformation of space under a change of observer
e3
e1
e2
* * 0 0( ) ( )( )t t= + −y y Q y y
All physically measurable vectors can be regarded as connecting two points in the inertial frame
These must therefore transform like vectors connecting two points under a change of observer
* * * *= = = =b Qb n Qn v Qv a Qa
Note that time derivatives in the observer’s reference frame have to account for rotation of the reference frame
** * * * * *0
0 02 2 2 2
( ( )) ( ( ))
dd d dt t dt dt dt dt
= = = − = − − −
= = = − = − + − − − −
yy yv Qv Q Q Q y y Ω y y
y yy y Ω ya Qa Q Q Q y y Ω y y Ω
Td dt
= QΩ Q
Inertial frame
Observer frame
Objective (frame indifferent) tensors: map a vector from the observed (inertial) frame back onto the inertial frame
= ⋅t n σ
* *T T= =σ QσQ D QDQ
Invariant tensors: map a vector from the reference configuration back onto the reference configuration
0 = ⋅T m Σ
* =Σ Σ
Mixed tensors: map a vector from the reference configuration onto the inertial frame
d d=y F x * =F QF
Some Transformations under observer changes
The deformation mapping transforms as ( )* * 0 0( , ) ( ) ( ) ( , )t t t t= + −y X y Q y X y
The deformation gradient transforms as *
* ∂ ∂ = = =
∂ ∂ y yF Q QF X X
The right Cauchy Green strain Lagrange strain, the right stretch tensor are invariant * * * * *T T T= = = = =C F F F Q QF C E E U U
The left Cauchy Green strain, Eulerian strain, left stretch tensor are frame indifferent * * * *T T T T T= = = =B F F QFF Q QCQ V QVQ
The velocity gradient and spin tensor transform as
( )* * * 1 1
W L L QWQ Ω
* * * * *0 0 0
0 02 2 2 2
( ( )) ( ( ))
dd d dt t dt dt dt dt
= = = − = − − −
= = = − = − + − − − −
yy yv Qv Q Q Q y y Ω y y
y yy y Ω ya Qa Q Q Q y y Ω y y Ω
(the additional terms in the acceleration can be interpreted as the centripetal and coriolis accelerations) The Cauchy stress is frame indifferent * T=σ QσQ (you can see this from the formal definition, or use
the fact that the virtual power must be invariant under a frame change) The material stress is frame invariant * =Σ Σ The nominal stress transforms as * 1 1( ) T T TJ J− −= ⋅ = ⋅ =S QF Q Q F Q SQσ σ (note that this
transformation rule will differ if the nominal stress is defined as the transpose of the measure used here…)
Some Transformations under observer changes
The deformation mapping transforms as
The deformation gradient transforms as
The right Cauchy Green strain Lagrange strain, the right stretch tensor are invariant
The left Cauchy Green strain, Eulerian strain, left stretch tensor are frame indifferent
The velocity gradient and spin tensor transform as
The velocity and acceleration vectors transform as
(the additional terms in the acceleration can be interpreted as the centripetal and coriolis accelerations)
The Cauchy stress is frame indifferent (you can see this from the formal definition, or use the fact that the virtual power must be invariant under a frame change)
The material stress is frame invariant
*
*
¶¶
===
¶¶
Constitutive Laws
General Assumptions: 1. Local homogeneity of deformation (a deformation gradient can always be calculated) 2. Principle of local action (stress at a point depends on deformation in a vanishingly small material element surrounding the point) Restrictions on constitutive relations: 1. Material Frame Indifference – stress-strain relations must transform consistently under a change of observer 2. Constitutive law must always satisfy the second law of thermodynamics for any possible deformation/temperature history.
Equations relating internal force measures to deformation measures are known as Constitutive Relations
e3
e1
e2
D q s y t t θ ψ θσ ρ
θ ∂ ∂ ∂ − − + ≥ ∂ ∂ ∂
Fluids
Properties of fluids • No natural reference configuration • Support no shear stress when at rest
Kinematics
• Only need variables that don’t depend on ref. config
Conservation Laws
∂ =
∂ ( ) / 2 ( ) / 2ij ij ij ij ij ji ij ij jiL D W D L L W L L= + = + = − k
i ijk ijk ij j
v W y
k i i i
k
i i k i i i i ik k ik ik k
kx const y const y const y const
i k k ik k k k ijk j k
i iy const
v v y v v va L v D W v t y t t t t
vv v W v v v v y t y
ω
j k y const
ρ ρ σ σ =
=
∂∂ = − +
D q s y t t θ ψ θσ ρ
θ ∂ ∂ ∂ − − + ≥ ∂ ∂ ∂
Objectivity and dissipation inequality show that constitutive relations must have form
Internal Energy Entropy Free Energy Stress response function Heat flux response function
ˆ( , )ε ε ρ θ= ˆ( , )s s ρ θ=
ˆ ( , ) sψ ψ ρ θ ε θ= = −
ˆ ˆ ˆ( , , ) ( , ) ( , , )vis ij ij ij eq ij ij ijD Dσ σ θ ρ π ρ θ δ σ ρ θ= = − +
ˆ , , ,i i ij i
q q D y θθ ρ
∂ = ∂
2
π π ερ π θ ρ θ ρ θ ρ
πψ θθ ρθ ρ θ
∂ ∂ = = −
∂ ∂ ∂ ∂∂ ∂
= − = + ∂ ∂ ∂ ∂
∂∂∂ = − = −
ij ij ij i i i
∂ ∂ ≥ ≥ ∂ ∂
Constitutive Models for Fluids
ˆ ( ) ( )ij eq ijψ ψ ρ σ π ρ δ= =−Elastic Fluid
( )0log log ( 1)v v v ij ij ij
pc c c R s p Rε θ ψ θ θ θ ρ σ δ ρ θδ γ ρ
= = = − − − = − = − −Ideal Gas
ˆ ( , ) ( ( , ) ( , ) ) 2 ( , )( / 3)ij eq kk ij ij kk ijD D Dψ ψ ρ θ σ π ρ θ κ ρ θ δ η ρ θ δ= =− − + −Newtonian Viscous
1 1 2 3 2 1 2 3 3 1 2 3
ˆ ( , ) ( , ) ( , , , , ) ( , , , , ) ( , , , , )ij eq ij ij ij ik kjI I I I I I D I I I D D
ψ ψ ρ θ σ π ρ θ δ η ρ θ δ η ρ θ η ρ θ
= =− + + +Non-Newtonian
ˆ ˆ ˆ( , , ) ( , ) ( , , )vis ij ij ij eq ij ij ijD Dσ σ θ ρ π ρ θ δ σ ρ θ= = − +ˆ ( , ) sψ ψ ρ θ ε θ= = −
Derived Field Equations for Newtonian Fluids
1 ( ) 2
i k
ji i i i i i i k k k ijk j k
j k iy const y const
v v vb a a v v v v y y t t y σ
ρ ρ ω = =
∂ ∂ ∂ ∂ ∂ Combine BLM With constitutive law. Also recall
Compressible Navier-Stokes ( )2 ( , ) / 3 ( , ) ( , )ij kk ij i i eq kk i j
p D D b a p D y y
∂ ∂
vv b a y y y y y
π η κ η ρ ρ ρ ρ
∂ ∂∂ − + + − + = ∂ ∂ ∂ ∂ ∂
i iy const
π ρ ρ ρ ρ ω
=
∂ ∂ ∂ − + = + + ∈
21 i i i
η ρ ρ
1 2
ji ij
j i
0 or 0i kk
Unknowns: , ip v
2 2 2
2 1 2 ( )
3 i k l k i
ijk ijk k ij j i j j j l l l k j k const
v v vb D y y y y y y y y y t
ω ωη ρ ηη κ ω ω ρ ρ =
∂ ∂ ∂ ∂ ∂∂ ∂ + − ∈ + − + ∈ + − = ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ x
For an elastic fluid
j
j k const
ω ω ω
b D y y x t
ω ωη ω ρ =
k i k ijk ij j i
j kconst
ω ω ω
∂ ∂ ∂x
If flow of an ideal fluid is irrotational at t=0 and body forces are curl free, then flow remains irrotational for all time (Potential flow)
Derived field equations for fluids
• Bernoulli 1 constant 2
π ψ
eq i iH v v
π ψ
p v v ρ
B
R
Example
j i
Steady 2D flow, ideal fluid Calculate the force acting on the wall Take surrounding pressure to be zero
( ) B R R B
ρ ρ ρ⋅ + = + ⋅∫ ∫ ∫ ∫n σ b v v v n
3
A A
p dA A v p p dAρ α− ⋅ − + − =∫ ∫n j j j j
2 0 0 0 sinA vρ α= −F j
Exact solutions: potential flow
p v v tρ
∂
If flow irrotational at t=0, remains irrotational; Bernoulli holds everywhere
Irrotational: curl(v)=0 so i i
v y
V
e1
e2
a
2
2 ( ) ( )( )a V y V t r y V t y V t
r α α α
α α α α −
Exact solutions: Stokes Flow
y1
h
Steady laminar viscous flow between plates Assume constant pressure gradient in horizontal direction
2 2 2 1
V p h y h L
η
v vp p fb y y v t L y
η η ρ ρ =
Exact Solutions: Acoustics Assumptions: Small amplitude pressure and density fluctuations Irrotational flow Negligible heat flow Neglect body forces
Mass conservation:
δρ∂ ∂ =
ρ =
i
iconst
θ =
∂ ∂x Entropy equation:
( )0log logv v vc c c R s p Rε θ ψ θ θ θ ρ ρ θ= = − − + =
( ) / 0 0log log exp[( ) / )vR c
v vs c R s s s cθ ρ θ ρ= − + ⇒ = −
Hence:
1 s
s const
−
=
∂ = = = =
∂
Application of continuum mechanics to elasticity
e3
e1
e2
e3
e1
e2
1 1 ij ik kjJ JFS σ− −= ⋅ =S F σ
1 1 1T ij ik kl jlJ JF Fσ− − − −= ⋅ =⋅Σ F Fσ Σ
0 0 i
ji i i
j x const
i C Q s
θ ∂ ∂ ∂ Σ − − + ≥ ∂ ∂ ∂
( ) ( ) 1
2 3
kk
I J
=
J
B
1 2 3 1 2 1 2 3ˆ( ) ( ) ( , , ) ( , , ) ( , , )W W U I I I U I I J U λ λ λ= = = =F C
• Strain energy potential 0W ρ ψ=
1 ij ik
1 3 1 2 2 33
2 2ij ij ik kj ij U U U UI B B B I I I I II
σ δ ∂ ∂ ∂ ∂
1 1 22 /3 4 /31 2 1 2 2
2 1 12 3 ij
ij ij ik kj ij U U U U U UI B I I B B
J I I I I I JJ J
δ σ δ
(1) (1) (2) (2) (3) (3)31 2
1 2 3 1 1 2 3 2 1 2 3 3 ij i j i j i j
U U Ub b b b b bλλ λ σ
= + + ∂ ∂ ∂
2 (1) (1) 2 (2) (2) 2 (3) (3) 1 2 3λ λ λ= ⊗ + ⊗ + ⊗B b b b b b b
Specific forms for free energy function
• Neo-Hookean material 21 1
KU I Jµ = − + −
2 2 2 KU I I Jµ µ
= − + − + −
1 1 3ij ij kk ij ijB B K J
J µ
( )21 2 15/3 7 /3
1 1 1[ ] 1 3 3 3ij ij kk ij kk ij kk ij ik kj kn nk ij ijB B B B B B B B B K J
J J µ µ
• Generalized polynomial function 2 1 2
1 1 ( 3) ( 3) ( 1)
2
ij i j i
= − − + −∑ ∑
α= = + + − + −∑• Ogden
1 1 11( 3) ( 9) ( 27) ... 1 2 220 1050
KU I I I Jµ β β
= − + − + − + + −
rθ
φ
eR
e3
φ
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
rr rr rrF B F B
F B θθ θθ θθ
φφ φφ φφ
2 2
= = = = = =
21 2 1
21 2 1
22 3 3
22 3 3
rr rr rr I IU U U U UI B B p
I I I I I
I IU U U U UI B B p I I I I Iθθ φφ θθ θθ
σ
( ) 0 1 2 0rr
rr r d b
dr r θθ φφ σ σ σ σ ρ+ − − + =• Equilibrium (or use PVW)
( ) ( )r a r bu a g u b g= =
(gives ODE for p(r)
• Boundary conditions
2
2
j i i
u uu C b x x x t
u u t R n t t R
σ ε σ ε α θ ρ ρ
σ
kl ij kl ij
U UC σ σ
∂ ∂∂ ∂ = = = =
Approximations: • Linearized kinematics • All stress measures equal • Linearize stress-strain relation
1 ij ij kk ij ijT
E E ν νε σ σ δ α δ+
= − + 1 1 2 1 2ij ij kk ij ij
= + − + − −
Solving linear elasticity problems spherical/axial symmetry
R θ
e3
φ
0 0 0 0 0 0 0 0 0 0 0 0
RR RR
θθ θθ
φφ φφ
σ ε
du E E TdR
−
= − + − −
σ σ σ ρ+ − − + =
02 2 2 1 1 1 22 2 1 ( )
1 1 d u du u d d d TR u b R
R dR dR dR dR EdR R R
α ν ν ν ρ
ν ν + + −
( ) ( )rr a rr ba t b tσ σ= =
• Boundary conditions
2
(1 ) (3 4 ) 8 (1 )
3(1 ) (1 2 ) 8 (1 )
31 (1 2 ) 8 (1 )
k k i i i
k k i j k k ij i j j i ij
k k i j i j j i ij k k ij
P x xu P E R R
P x x x P x P x P x R RE R R
P x x x P x P x P x RR R
ν ν π ν
δνε ν π ν
Point force normal to a surface:
e1
P
e3
i R x R
− − − Ψ = = − +
i i i i i
x x xPu E R R x RR
δν νν δ π
( )( ) ( ) 23 23
3 3 3 3 3 32 3 2 2 3 3
(1 2 )(2 ) (1 2 )3 2 ( ) ( )
i j ij i j ij i j j i i j ij
x x x R xP Rx x x x x x R R R R x R x
ν νσ δ δ δ δ δ δ π
− + − = − + + − + + − + +
k i k k
ρ ρ
i u x
2 2 0 0
i i i i
x x x x φρ ρ
∂ Ψ ∂ = − = −
Dynamic elasticity solutions
( )i i k ku a f ct x p= −Plane wave solution
2 2 2 0
k i k k
ρ ρ
( )2 0 0
− + = −
2 2 2 00 /i ia p c c ρ µ= ⇒ = =Solutions:
2 2 02 (1 ) / (1 2 )i i La p c cη µ ν ρ ν= ⇒ = = − −
Kinematics
Slide Number 23
Slide Number 25
Governing equations for a control volume (review)
Example
General structure of constitutive relations
Forms of constitutive relation used in literature
Specific forms for free energy function
Solving problems for elastic materials (spherical/axial symmetry)
Linearized field equations for elastic materials
Solving linear elasticity problems spherical/axial symmetry
Some simple static linear elasticity solutions
Dynamic elasticity solutions