EMR’16 UdeS - Longueuil June 2016 - EMRwebsite - … - EMR and IBC of an... · EMR’16, UdeS...
14
1 EMR’16 UdeS - Longueuil June 2016 Summer School EMR’16 “Energetic Macroscopic Representation” « EMR AND I NVERSION - BASED C ONTROL OF AN E LECTRIC V EHICLE » Prof. João P. Trovão 1 , Dr. W. Lhomme 2 1 e-TESC, Université de Sherbrooke, Canada 2 L2EP, Université Lille1, France http://www.emrwebsite.org/ 2 « EMR and IBC of an Electric Vehicle » EMR’16, UdeS Longueuil, June 2016 - Introduction - model representation simulation Simulation is a key issue before working on a real system… Tazzari Zero of L2EP real system i m i V m u dcm chop chop bat chop chop dcm arm dcm chop dcm arm i R e u i dt d L gear dcm dcm dcm dcm dcm k e i k T gear gear dcm gear f T T dt d J diff gear gear dcm gear gear k T k T wh dif dif gear dif dif k T k T res tot ev F F v dt d M How to organize simulation? Control?
Transcript of EMR’16 UdeS - Longueuil June 2016 - EMRwebsite - … - EMR and IBC of an... · EMR’16, UdeS...

1
EMR’16
UdeS - Longueuil
June 2016
Summer School EMR’16
“Energetic Macroscopic Representation”
« EMR AND INVERSION-BASED CONTROL
OF AN ELECTRIC VEHICLE »
Prof. João P. Trovão1, Dr. W. Lhomme2
1 e-TESC, Université de Sherbrooke, Canada2 L2EP, Université Lille1, France
http://www.emrwebsite.org/
2
« EMR and IBC of an Electric Vehicle »
EMR’16, UdeS Longueuil, June 2016
- Introduction -
model representation simulation
Simulation is a key issue before working on a real system…
Tazzari Zero
of L2EP
real
system
i mi
V mu
dcmchopchop
batchopchop
dcmarmdcmchopdcmarm iReuidt
dL
geardcmdcm
dcmdcmdcm
ke
ikT
geargeardcmgear fTTdt
dJ
diffgeargear
dcmgeargear
k
TkT
whdifdif
geardifdif
k
TkT
restotev FFvdt
dM
How to organize simulation? Control?

2
3
« EMR and IBC of an Electric Vehicle »
EMR’16, UdeS Longueuil, June 2016
- Outline -
1. Studied EV
2. EMR of the studied EV
3. Inversion-based control of the EV
EMR’16
UdeS - Longueuil
June 2016
Summer School EMR’16
“Energetic Macroscopic Representation”
« STUDIED ELECTRIC VEHICLE »
3
5
« EMR and IBC of an Electric Vehicle »
EMR’16, UdeS Longueuil, June 2016
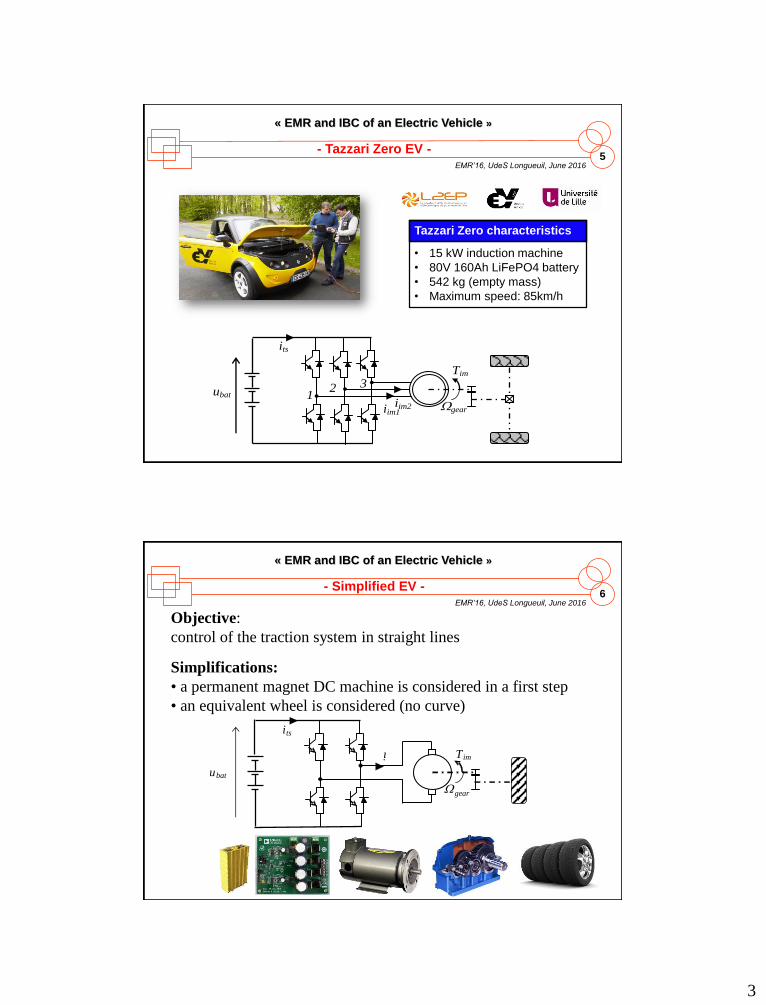
- Tazzari Zero EV -
ubat iim2
1 2 3
Tim
gear iim1
its
itot1
Tazzari Zero characteristics
• 15 kW induction machine
• 80V 160Ah LiFePO4 battery
• 542 kg (empty mass)
• Maximum speed: 85km/h
6
« EMR and IBC of an Electric Vehicle »
EMR’16, UdeS Longueuil, June 2016
- Simplified EV -
Objective:
control of the traction system in straight lines
Simplifications:
• a permanent magnet DC machine is considered in a first step
• an equivalent wheel is considered (no curve)
ubat
i T im
gear
its

4
EMR’16
UdeS - Longueuil
June 2016
Summer School EMR’16
“Energetic Macroscopic Representation”
« EMR OF THE
STUDIED ELECTRIC VEHICLE »
8
« EMR and IBC of an Electric Vehicle »
EMR’16, UdeS Longueuil, June 2016
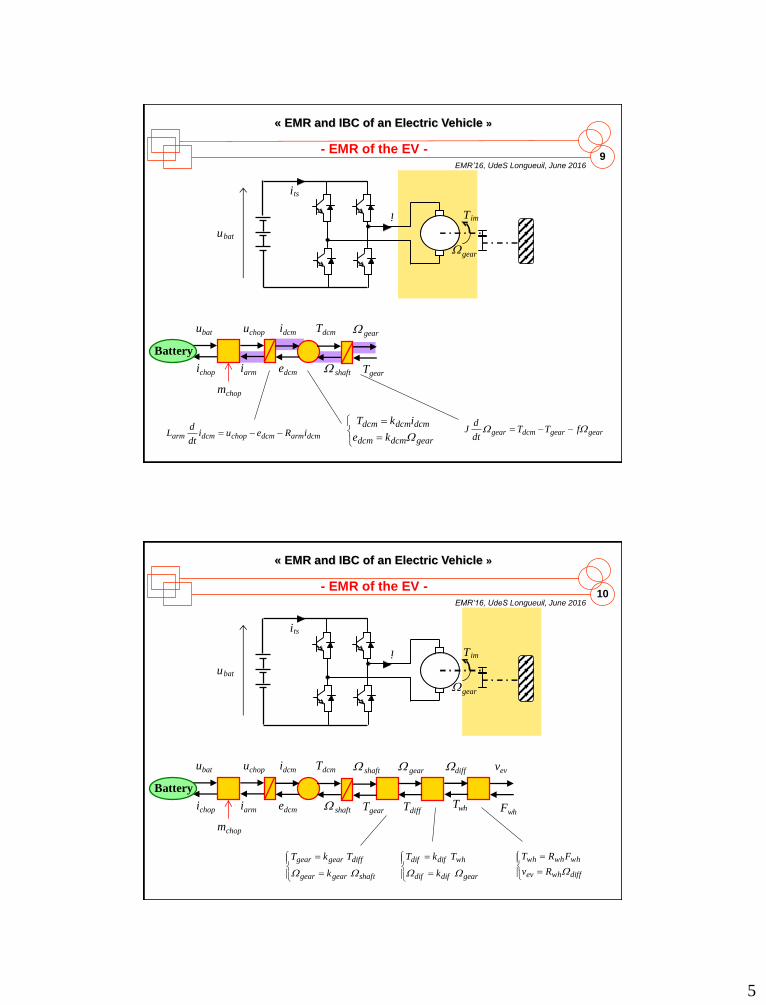
- EMR of the EV -
ubat
T im
gear
its
ubat
ichop
uchop
iarm
mchop
i
u
chopchop
chopchop
arm
bat
im
Vm
Battery
Structural
Representation
Functional Description
5
9
« EMR and IBC of an Electric Vehicle »
EMR’16, UdeS Longueuil, June 2016
idcm
- EMR of the EV -
ubat
i
T im
gear
its
ubat
Battery
ichop
uchop
iarm
Tdcm
shaftedcm
mchop
gear
Tgear
dcmarmdcmchopdcmarm iReuidt
dL geargeardcmgear fTT
dt
dJ
geardcmdcm
dcmdcmdcm
ke
ikT
10
« EMR and IBC of an Electric Vehicle »
EMR’16, UdeS Longueuil, June 2016
- EMR of the EV -
ubat
i
T im
gear
its
ubat
Battery
ichop
uchop
iarm
Tdcm
shaftTwh
idcm
Tdiffedcm
mchop
Fwh
shaft
Tgear
gear diff vev
shaftgeargear
diffgeargear
k
TkT
geardifdif
whdifdif
k
TkT
diffwhev
whwhwh
Rv
FRT

6
11
« EMR and IBC of an Electric Vehicle »
EMR’16, UdeS Longueuil, June 2016
- EMR of the EV -
ubat
i
T im
gear
its
ubat
Battery
ichop
uchop
iarm
Tdcm
shaftTwh
idcm
Tdiffedcm
mchop
FwhTgear
gear diff vev Fwh
Fres
vev
vev
restotev FFvdt
dM
shaft
12
« EMR and IBC of an Electric Vehicle »
EMR’16, UdeS Longueuil, June 2016
shaft
- EMR of the EV -
ubat
i
T im
gear
its
ubat
Battery
ichop
uchop
iarm
Tdcm
shaftTwh
idcm
Tdiffedcm
mchop
FwhTgear
gear diff vev Fwh
Fres
vev
vev
Conflict of association:
shaft and vev state variables but shaftgeardiffwhev kkRv
permutations

7
13
« EMR and IBC of an Electric Vehicle »
EMR’16, UdeS Longueuil, June 2016
- EMR of the EV -
ubat
i
T im
gear
its
ubat
Battery
ichop
uchop
iarm
Tdcm
shaft
idcm
edcm
mchop
Fwh
Fres gear diff vev
Fwh
Fres
vev
vev
Conflict of association:
a unique state variable is required!
merging
Tgear Tdiff vev
restoteveq FFvdt
dM
222
whdiffgear
shaft
eqRkk
JMM
14
« EMR and IBC of an Electric Vehicle »
EMR’16, UdeS Longueuil, June 2016
- EMR of the EV -
ubat
Battery
ichop
uchop
iarm
Tdcm
shaft
idcm
edcm
mchop
Fwh
Fres gear diff vev
Tgear Tdiff vev
Env.
a
A
aM g
Faero
½ Froll½ Froll
Fgrade
aa sinMgvACcosMgkF evxairrollres 2
2
1

8
EMR’16
UdeS - Longueuil
June 2016
Summer School EMR’16
“Energetic Macroscopic Representation”
« INVERSION-BASED CONTROL OF THE
STUDIED ELECTRIC VEHICLE »
16
« EMR and IBC of an Electric Vehicle »
EMR’16, UdeS Longueuil, June 2016
- Tuning path -
Objective: control the EV velocity
Tuning variable: modulation ratio of the DC-DC converter
chopper DC machine gearboxes wheel chassis
ubat
Battery
ichop
uchop
iarm
Tdcm
shaft
idcm
edcm
mchop
Fwh
Fres gear diff vev
Tgear Tdiff vev
Env.
9
17
« EMR and IBC of an Electric Vehicle »
EMR’16, UdeS Longueuil, June 2016
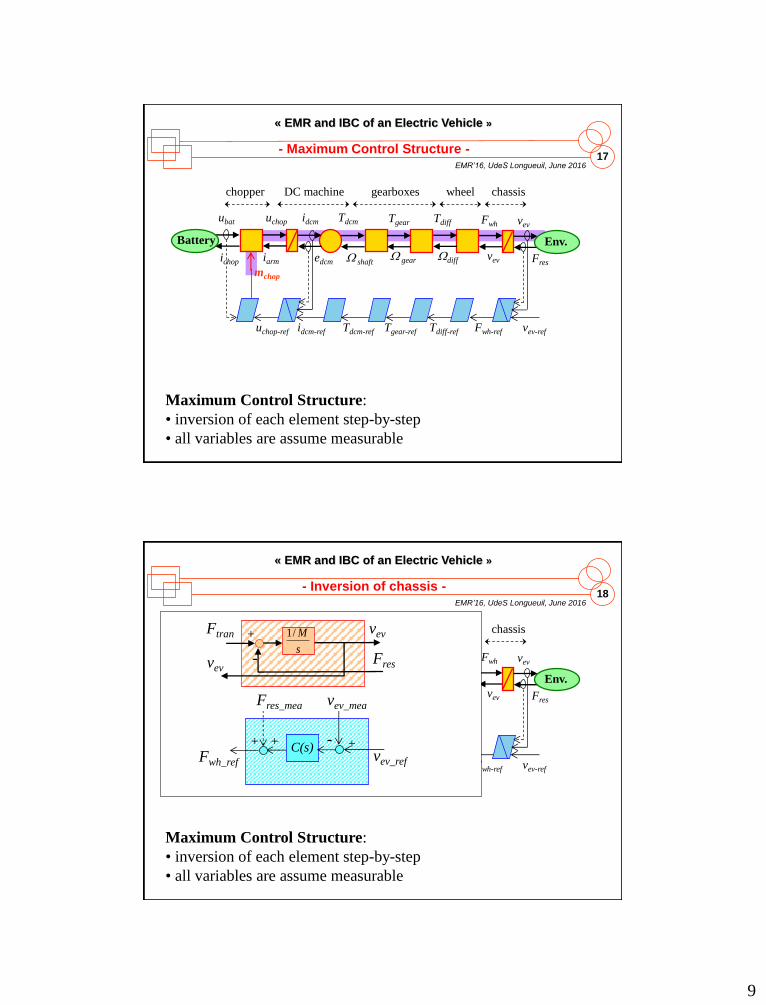
- Maximum Control Structure -
Maximum Control Structure:
• inversion of each element step-by-step
• all variables are assume measurable
chopper DC machine gearboxes wheel chassis
ubat
Battery
ichop
uchop
iarm
Tdcm
shaft
idcm
edcm
mchop
Fwh
Fres gear diff vev
Tgear Tdiff vev
Env.
vev-refFwh-refTdiff-refTgear-refTdcm-refidcm-refuchop-ref
18
« EMR and IBC of an Electric Vehicle »
EMR’16, UdeS Longueuil, June 2016
- Inversion of chassis -
Maximum Control Structure:
• inversion of each element step-by-step
• all variables are assume measurable
chopper DC machine gearboxes wheel chassis
ubat
Battery
ichop
uchop
iarm
Tdcm
shaft
idcm
edcm
mchop
Fwh
Fres gear diff vev
Tgear Tdiff vev
Env.
vev-refFwh-refTdiff-refTgear-refTdcm-refidcm-refuchop-ref
vev_ref
C(s)Fwh_ref
vev_mea
+-
Fres_mea
++
vevFtran
-
Fres
+s
M/1
vev

10
19
« EMR and IBC of an Electric Vehicle »
EMR’16, UdeS Longueuil, June 2016
- Inversion of wheel -
Maximum Control Structure:
• inversion of each element step-by-step
• all variables are assume measurable
chopper DC machine gearboxes wheel chassis
ubat
Battery
ichop
uchop
iarm
Tdcm
shaft
idcm
edcm
mchop
Fwh
Fres gear diff vev
Tgear Tdiff vev
Env.
vev-refFwh-refTdiff-refTgear-refTdcm-refidcm-refuchop-refTdiff-ref Fwh-ref
TdiffFwh
Ωdiff
whR
1
whR
vev
whR
1
20
« EMR and IBC of an Electric Vehicle »
EMR’16, UdeS Longueuil, June 2016
- Practical Control Structure -
Example of simplification:
• merging of gains
chopper DC machine gearboxes wheel chassis
ubat
Battery
ichop
uchop
iarm
Tdcm
shaft
idcm
edcm
mchop
Fwh
Fres gear diff vev
Tgear Tdiff vev
Env.
vev-refFwh-refTdiff-refTgear-refTdcm-refidcm-refuchop-ref
merging
ktot=k1k2k3k4

11
21
« EMR and IBC of an Electric Vehicle »
EMR’16, UdeS Longueuil, June 2016
- Practical Control Structure -
Example of estimation:
• estimation of velocity
chopper DC machine gearboxes wheel chassis
ubat
Battery
ichop
uchop
iarm
Tdcm
shaft
idcm
edcm
mchop
Fwh
Fres gear diff vev
Tgear Tdiff vev
Env.
vev-refFwh-refTdiff-refTgear-refTdcm-refidcm-refuchop-ref
vev-est
22
« EMR and IBC of an Electric Vehicle »
EMR’16, UdeS Longueuil, June 2016
- Simulation -
Matlab-Simulink ©, using the EMR library

12
23
« EMR and IBC of an Electric Vehicle »
EMR’16, UdeS Longueuil, June 2016
- Implementation on the real vehicle -
Electronic
Control Unit
sensors
EMR’16
UdeS - Longueuil
June 2016
Summer School EMR’16
“Energetic Macroscopic Representation”
« REFERENCES »

13
EMR’16, UdeS Longueuil, June 201625
« EMR and IBC of an Electric Vehicle »
- References -
A. Bouscayrol, W. Lhomme, P. Delarue, B. Lemaire-Semail, S. Aksas, “Hardware-In-the-Loop simulation of
electric vehicle traction systems using Energetic Macroscopic Representation”, IEEE-IECON'06, Paris,
November 2006.
A. Bouscayrol, A. Bruyère, P. Delarue, F. Giraud, B. Lemaire-Semail, Y. Le Menach, W. Lhomme, F. Locment,
“Teaching drive control using Energetic Macroscopic Representation - initiation level”, EPE'07, Aalborg,
September 2007.
K. Chen, P. Delarue, A. Bouscayrol, R. Trigui, “Influence of control design on energetic performances of an
electric vehicle”, IEEE-VPPC'07, Arlington (U.S.A.), September 2007.
K. Chen, A. Bouscayrol, W. Lhomme, “EMR and Inversion-based control: application to an Electric Vehicle
with an electrical differential”, Journal of Asian Electric Vehicles, vol. 6, no.1, p. 1097-1102, June 2008.
J. P. Trovao, M. R. Dubois, M. A. Roux, E. Menard and A. Desrochers, “Battery and SuperCapacitor
Hybridization for a Pure Electric Three-Wheel Roadster”, IEEE-VPPC‘15, Montreal, QC, October 2015.
C. Depature, W. Lhomme, A. Bouscayrol, “Teaching Electric Vehicle drive control using Energetic
Macroscopic Representation”, EVS’27, Barcelona (Spain), November 2013.
W. Lhomme, Ph. Delarue, Ph. Barrade, A. Bouscayrol, “Maximum Control Structure of a series hybrid electric
vehicle using supercapacitors”, EVS'21, Monaco, April 2005.
EMR’16, UdeS Longueuil, June 201626
« EMR and IBC of an Electric Vehicle »
« BIOGRAPHIES »

14
EMR’16, UdeS Longueuil, June 201627
« EMR and IBC of an Electric Vehicle »
- Authors -
Prof. João P. Trovão
Université de Sherbrooke, e-TESC Lab., Qc, Canada
PhD in Electrical Engineering at University of Coimbra (2012)
Research topics: Electric Vehicles, Multiple Energy Storage,
Energy Management
Dr. Walter LHOMME
University Lille 1, L2EP, MEGEVH, France
PhD in Electrical Engineering at University of Lille1 (2007)
Research topics: EMR, HIL simulation, EVs and HEVs,
Energy Storage Subsystem, Traction subsystems,