
Embedded Systems in Automotive
30
-
Upload
- -
Category
Engineering
-
view
585 -
download
9
Transcript of Embedded Systems in Automotive
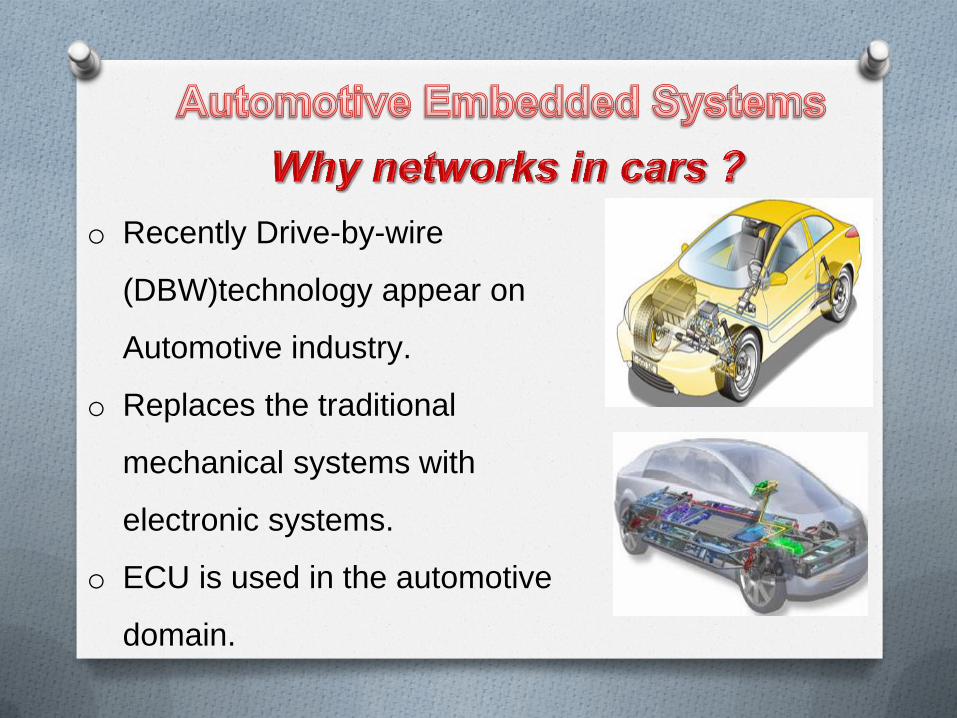
o Recently Drive-by-wire
(DBW)technology appear on
Automotive industry.
o Replaces the traditional
mechanical systems with
electronic systems.
o ECU is used in the automotive
domain.
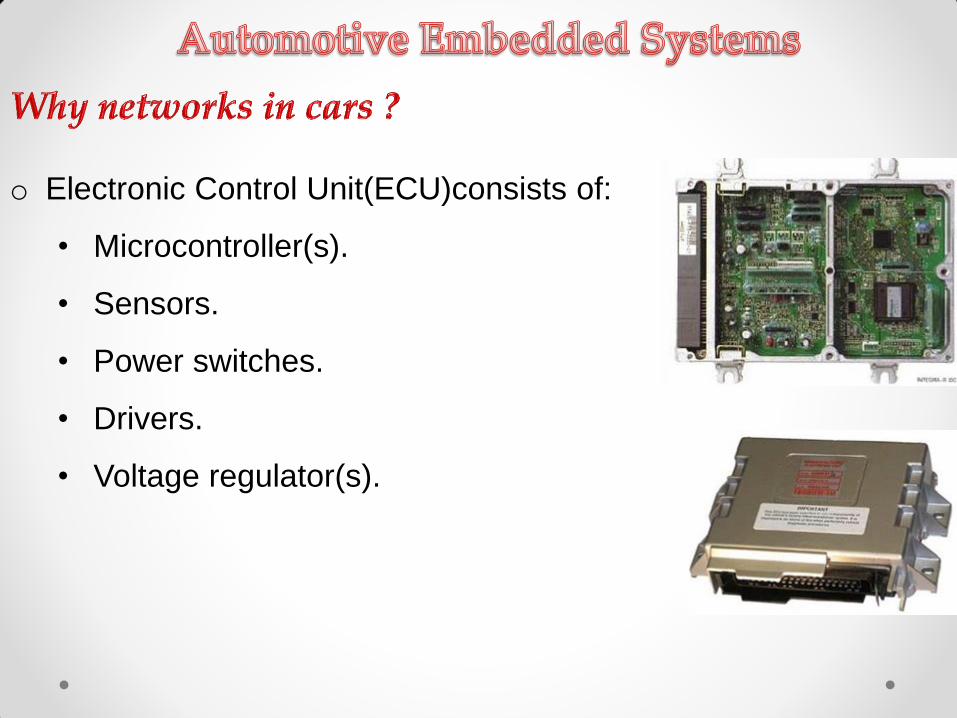
o Electronic Control Unit(ECU)consists of:
• Microcontroller(s).
• Sensors.
• Power switches.
• Drivers.
• Voltage regulator(s).
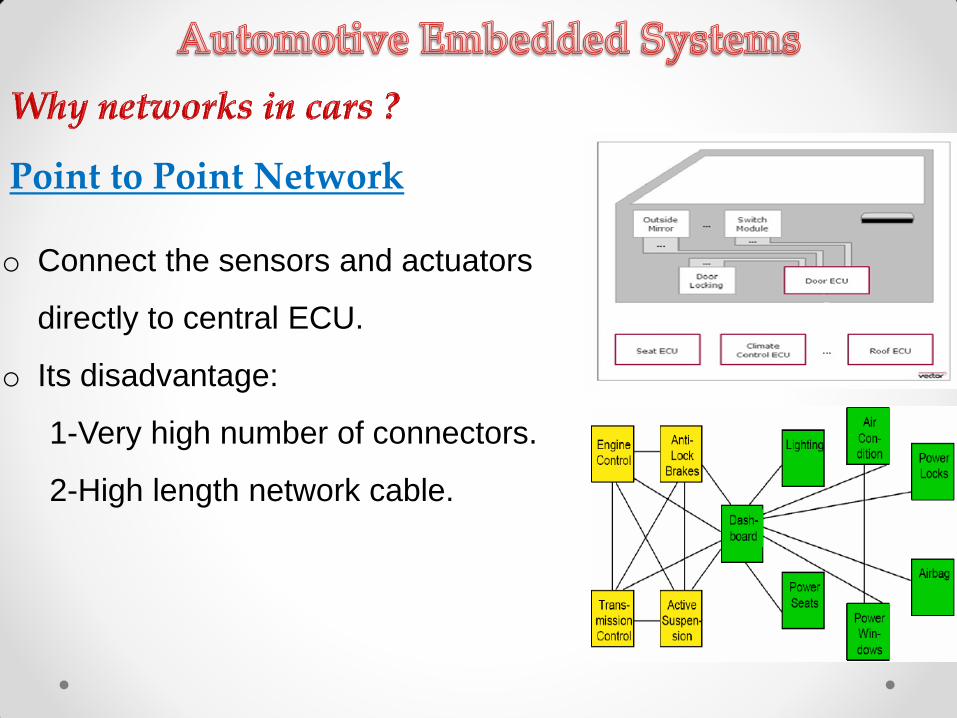
o Connect the sensors and actuators
directly to central ECU.
o Its disadvantage:
1-Very high number of connectors.
2-High length network cable.
Point to Point Network
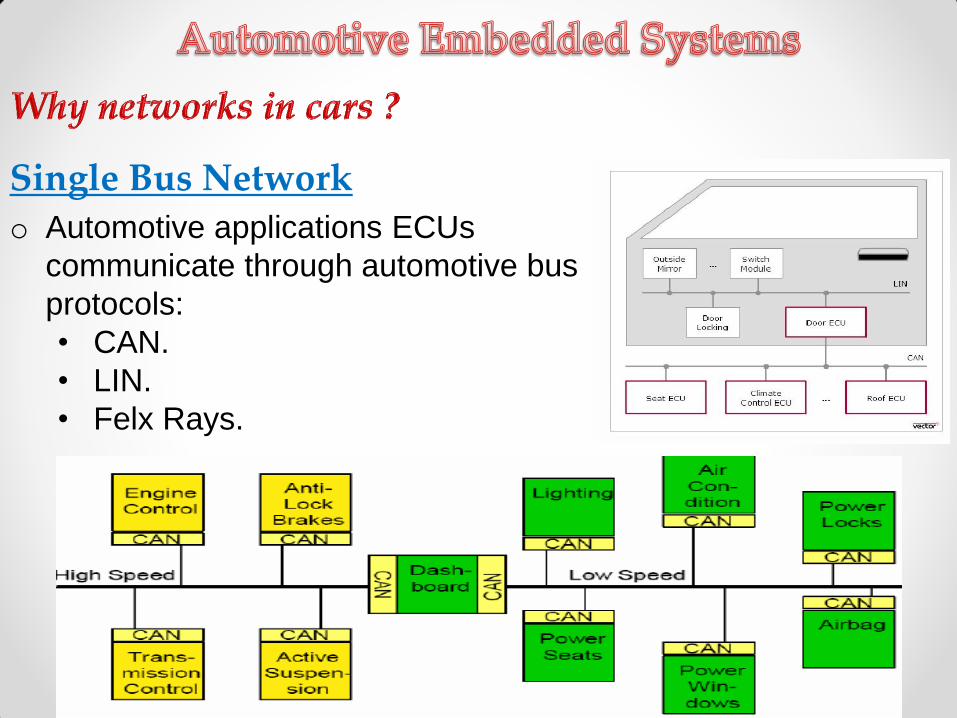
Single Bus Network
o Automotive applications ECUs
communicate through automotive bus
protocols:
• CAN.
• LIN.
• Felx Rays.
“It would be easy to say the modern car is a computer on wheels, but it’s more like 30 or more computers on wheels. “
Bruce Emaus, The chairman of SAE International embedded
software standards committee.
SAE: Society of Automotive Engineers
CAN
CAN
Power Train
Light
Sub-Bus
ITS
Window Lift
InteriorLight
Lock
Mirror
Lock
Mirror
Lock
Lock
Seat
Htng
Seat
Htng
Instruments
Central
Body Ctrl
Climate
Universal Motor
Universal Panel
Light
Roof
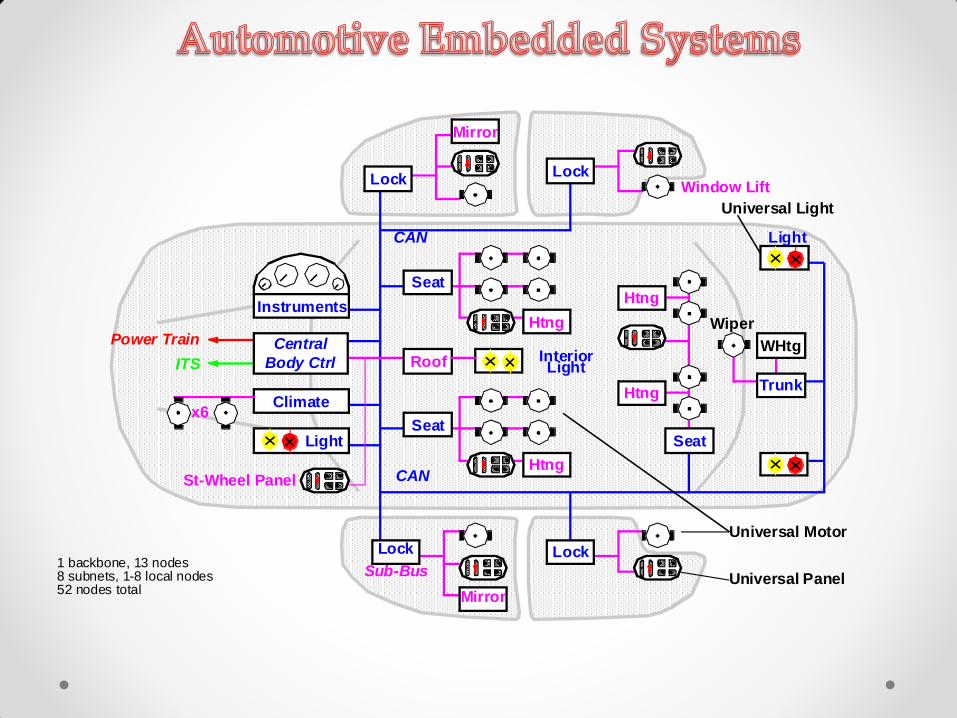
1 backbone, 13 nodes8 subnets, 1-8 local nodes52 nodes total
St-Wheel Panel
x6
Htng
Htng
Seat
Wiper
Trunk
WHtg
Universal Light
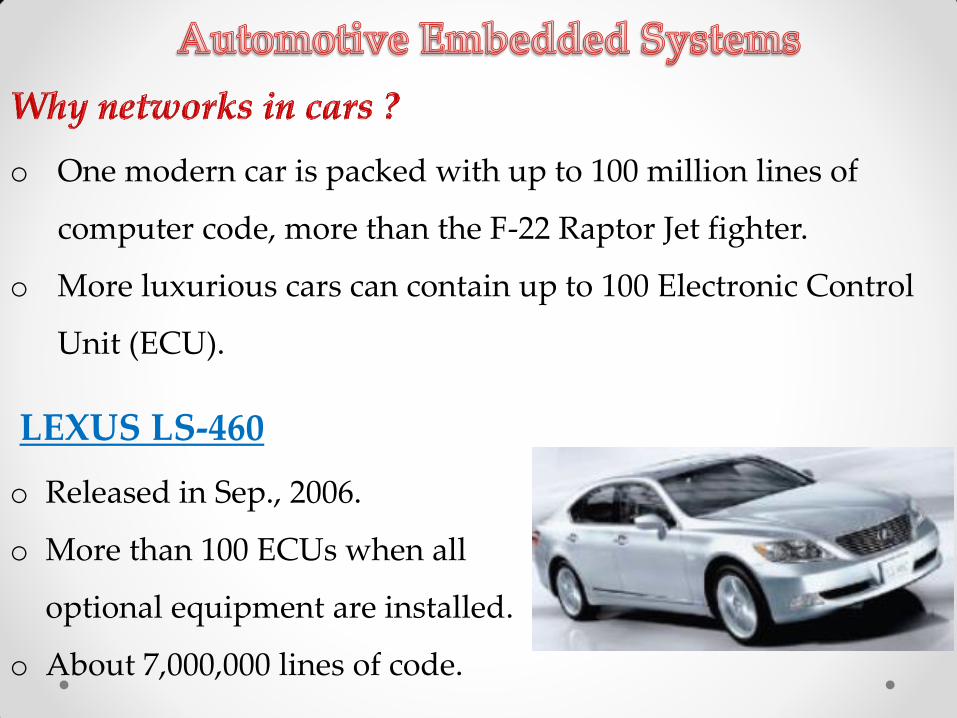
LEXUS LS-460
o Released in Sep., 2006.
o More than 100 ECUs when all
optional equipment are installed.
o About 7,000,000 lines of code.
o One modern car is packed with up to 100 million lines of
computer code, more than the F-22 Raptor Jet fighter.
o More luxurious cars can contain up to 100 Electronic Control
Unit (ECU).
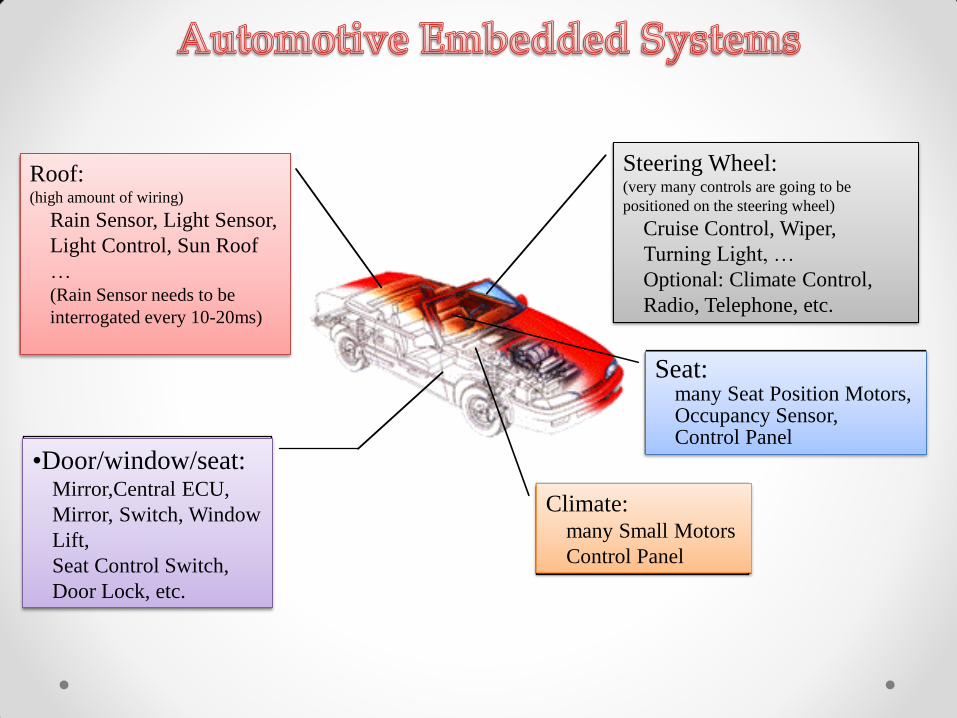
•Door/window/seat: Mirror,Central ECU,
Mirror, Switch, Window
Lift,
Seat Control Switch,
Door Lock, etc.
Roof: (high amount of wiring)
Rain Sensor, Light Sensor,
Light Control, Sun Roof
… (Rain Sensor needs to be
interrogated every 10-20ms)
Seat: many Seat Position Motors, Occupancy Sensor, Control Panel
Steering Wheel: (very many controls are going to be
positioned on the steering wheel)
Cruise Control, Wiper,
Turning Light, …
Optional: Climate Control,
Radio, Telephone, etc.
Climate: many Small Motors
Control Panel
Features of Automotive Embedded Systems
o ECUs are used for :
• energy saving & low emission • safety (active & passive) • comfortableness, convenience, entertainment • cost & weight reduction
o ECUs are connected with several in-vehicle networks.
o High reliability and safety requirements
o Strict real-time property required
o Severe environmental conditions (temperature, EMC)
o Severe production cost restriction

o The speed of the car and the
rotational speed of the wheel are
monitored, and a skid is detected.
o When a skid is detected, hydraulic
pressure to the brake is reduced to
stop the skid.
Applications of Automotive Embedded Systems
Anti-lock Breaking System(ABS)

o Safety Requirement Design:
• Continuous reduction of hydraulic
pressure causes non-braking.
• If some fault is detected, ABS stops
functioning.
• Then ,the brake works though a
skid cannot be avoided.
Applications of Automotive Embedded Systems
Anti-lock Breaking System(ABS)
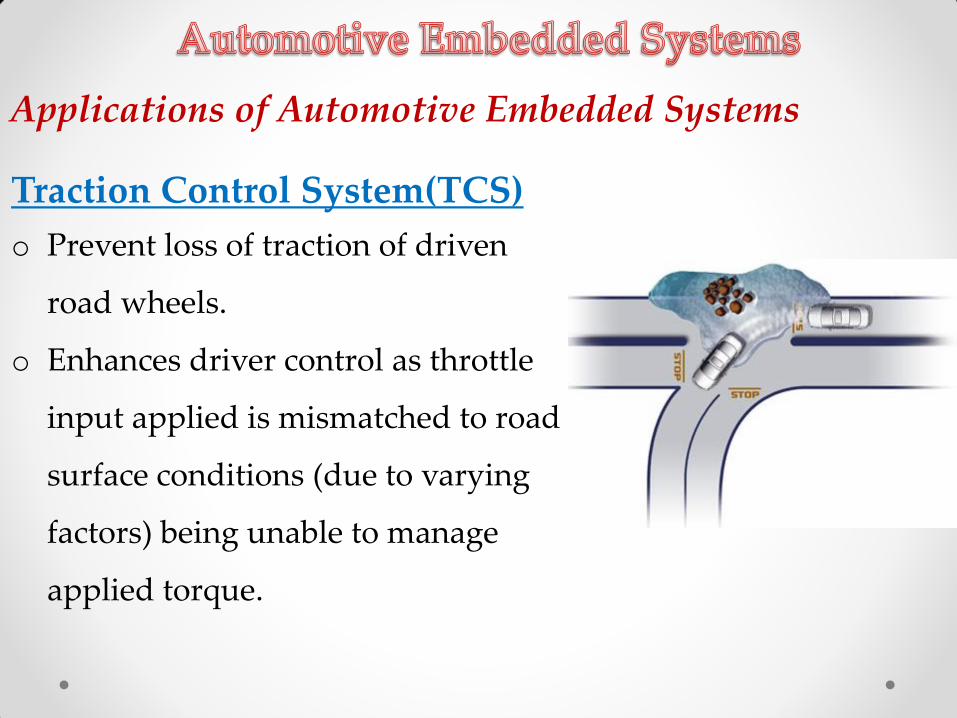
Traction Control System(TCS)
o Prevent loss of traction of driven
road wheels.
o Enhances driver control as throttle
input applied is mismatched to road
surface conditions (due to varying
factors) being unable to manage
applied torque.
Applications of Automotive Embedded Systems
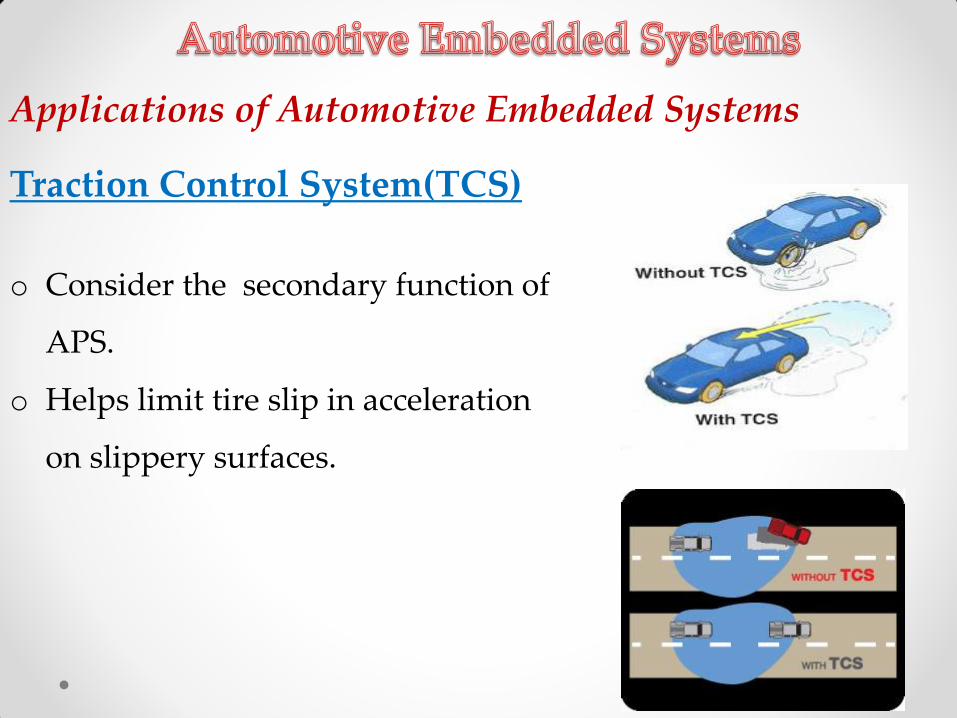
o Consider the secondary function of
APS.
o Helps limit tire slip in acceleration
on slippery surfaces.
Applications of Automotive Embedded Systems
Traction Control System(TCS)
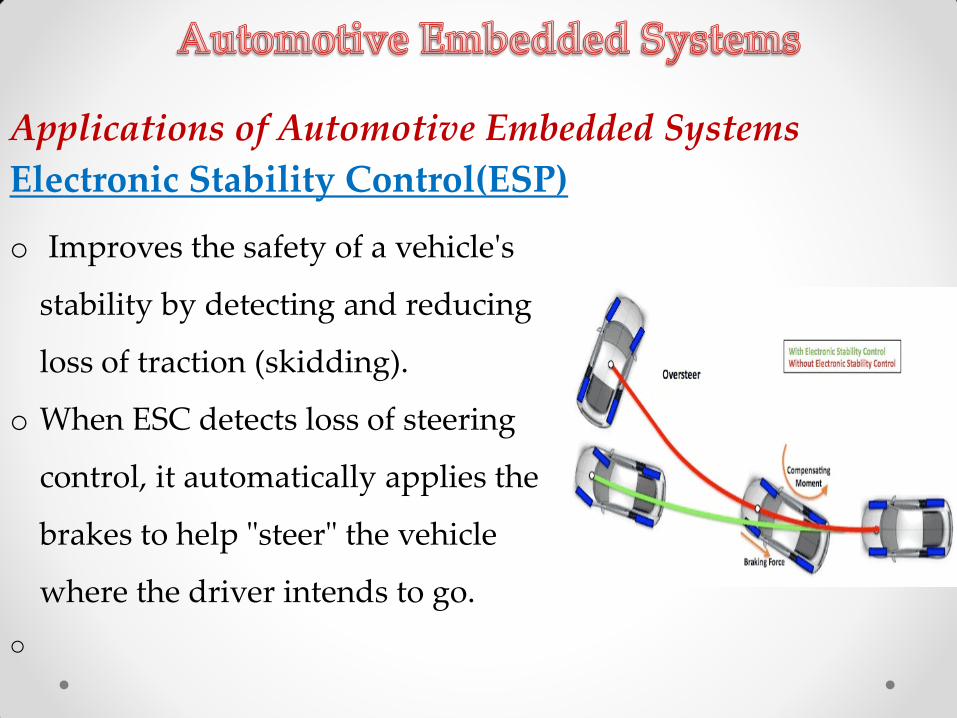
o Improves the safety of a vehicle's
stability by detecting and reducing
loss of traction (skidding).
o When ESC detects loss of steering
control, it automatically applies the
brakes to help "steer" the vehicle
where the driver intends to go.
o
Applications of Automotive Embedded Systems
Electronic Stability Control(ESP)
Applications of Automotive Embedded Systems
Electronic Stability Control(ESP)
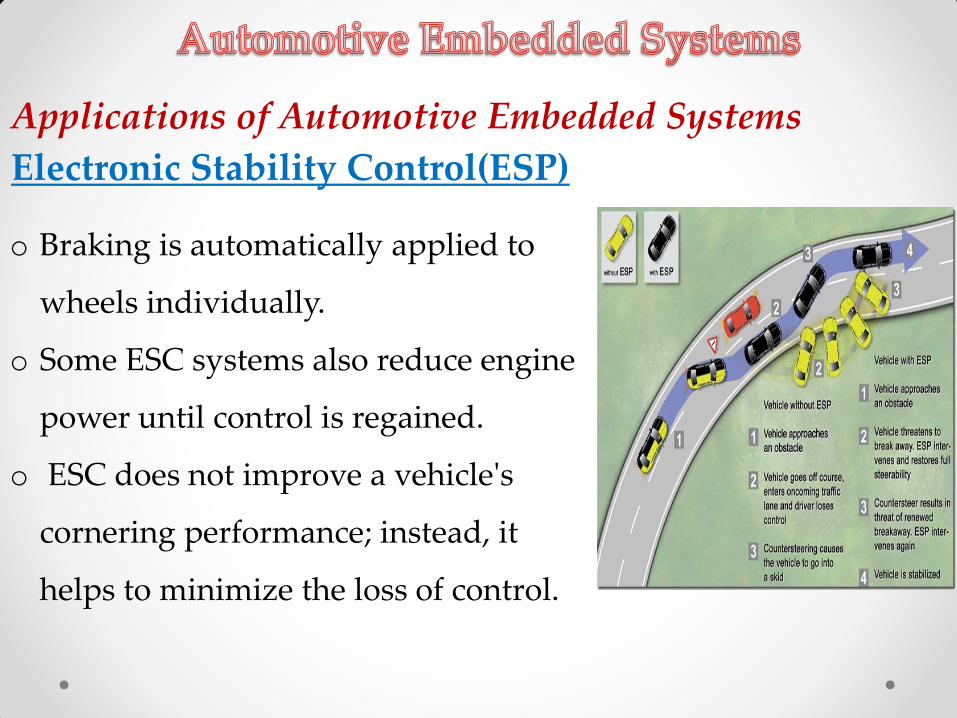
o Braking is automatically applied to
wheels individually.
o Some ESC systems also reduce engine
power until control is regained.
o ESC does not improve a vehicle's
cornering performance; instead, it
helps to minimize the loss of control.
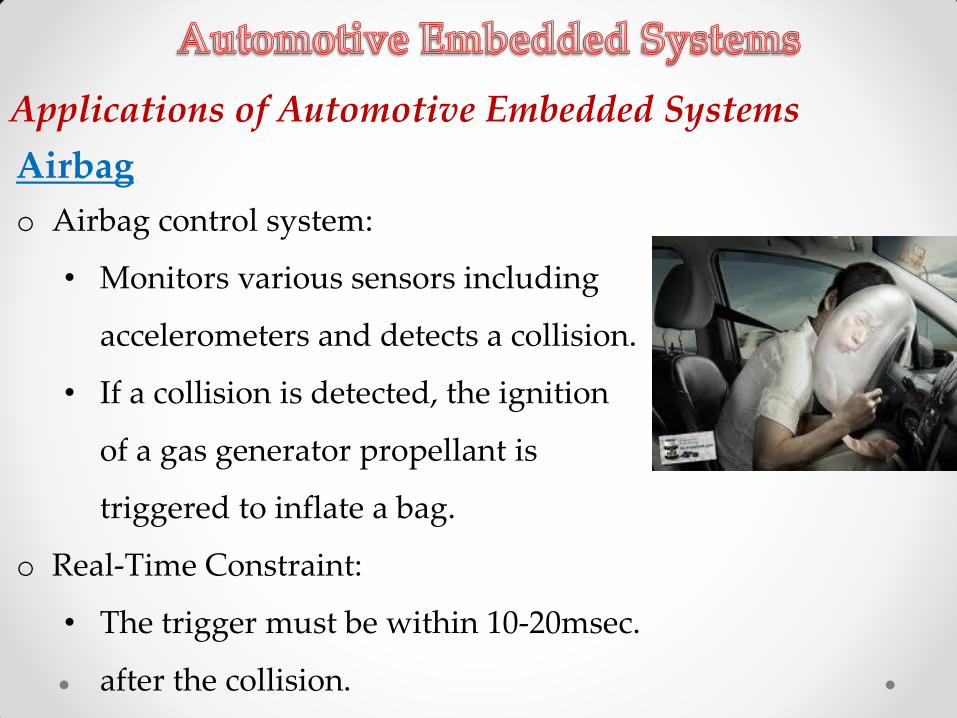
Airbag
o Airbag control system:
• Monitors various sensors including
accelerometers and detects a collision.
• If a collision is detected, the ignition
of a gas generator propellant is
triggered to inflate a bag.
o Real-Time Constraint:
• The trigger must be within 10-20msec.
after the collision.
Applications of Automotive Embedded Systems

Pre-crash Safety System (PCS)
o When an obstacle is detected with stereo camera and wave radar • the system retracts the seatbelts, warns the driver, and applies the brake.
o Driver's condition (eg. face direction) is monitored.
Applications of Automotive Embedded Systems
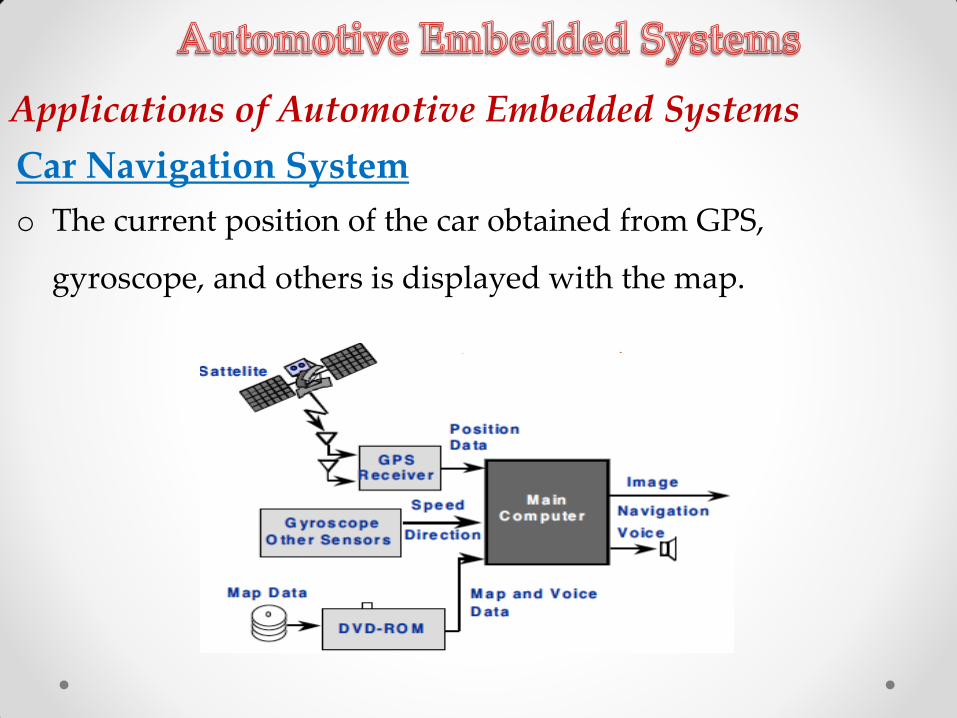
Car Navigation System
o The current position of the car obtained from GPS,
gyroscope, and others is displayed with the map.
Applications of Automotive Embedded Systems
Classification of Automotive Embedded Systems
o Powertrain and Control
▶ Engine, automatic transmission, hybrid control, ...
▶ Steering, brake, suspension, ...
o Body Electronics
▶ Instrument panel, key, door, window, lighting, …
▶ Air bag, seat belt, ...
o Multimedia Applications
▶ Car audio, car navigation, traffic information, ...
▶ Electronic toll collection (ETC), backguide monitor, ...
o Integrated Systems/Services
▶ Electronic stability control, pre-crash safety, … ▶ Parking assistance, lane keeping assistance, ...
o Stage 1: ECU is applied to various component independently network is not used.
o Stage 2: ECU exchanges data for improving the quality
o Stage 3: • Each system still operates autonomously. • some services are provided with multiple ECUs connected via
networks. • Mechanical backup system still exists even if an electronic system fails.
Evolution Steps of Automotive Control Systems
Evolution of automotive control systems and networks is well understood with the following 4 stages.
(Current) integrated systems/services
o Stage 4: • Networks with outside of the car (communication with another car and
the road) are intensively used. • Mechanical systems (incl. backups) are replaced with ECUs and
networks. • A failure of electronic systems is life-critical.
Evolution Steps of Automotive Control Systems
(Future) (true) by-wire systems
Problems of Automotive Embedded Systems
o Complicated system design
• Increasing development cost and time
• How to achieve high reliability and safety?
o Large-scale and complicated software
• How to effectively reuse existing software?
o Too large number of ECUs
• Increasing cost
• Insufficient space (in a car) for ECUs
o Complicated network architecture
• Increasing design complexity

Platform-base Development
Conventional Component-base Development o Each ECU (component) is developed independently.
o Automotive component supplier develops both of the hardware and
software of ECU.
o Car (system) is designed by integrating the ECUs developed by different
suppliers.
Platform-base Development o Platform should be developed at first.
o Platform = Hardware + Software + Network
o Application software should be developed on the Platform .
Automotive Architecture
AUTOSAR (Automotive Open System Architecture)
o global partnership of carmakers, car component ,electronics,
semiconductor, software industries
o founded in 2003.
o defines a methodology that supports a distributed, function-
driven development process.
o standardizes the software-architecture for ECU.
o Core partners: ▶ BMW ▶ Daimler ▶ PSA Peugeot Citroen ▶ Bosch ▶ Ford ▶ Toyota Motor ▶ Continental ▶ GM ▶ Volkswagen
Automotive Architecture
JASPAR (Japan Automotive Software Platform Architecture)
o Car makers and other companies develop network technology,
middleware, software platform for automotive control systems.
o founded in 2004.
o Board Members ▶ Toyota Motor ▶ Honda ▶ DENSO ▶ Nissan ▶ Toyota Tsusho Electronics
o Members about 100 carmakers, car component suppliers, semiconductor companies, and software companies
o Major Activities and Results ▶ Standardization related to FlexRay (wiring rule, ...) ▶ Development of software platform based on AUTOSAR Standard. ▶ Development of design guidelines for ISO 26262.

Automotive Network protocol
Sp
eed
[b
it/s
]
Byteflight optical bus
LIN master-slave
single wire bus no quartz
CAN-B event triggered fault tolerant dual wire
CAN-C event triggered
dual wire
Flex Ray
25.6M
20K
10M
1M
125K
incremental cost per node [$]
D2B, MOST token ring
optical bus
1 2 4.5 10
Automotive Network dominos
o Class A:
• low cost and data rate lower than 10 kbps
• Example: LIN
• used for body domain light functions.
o Class B:
• data rate (10‐125 kbps)
• Example : low‐rate CAN
• used for data exchange between ECUs to reduce the number of sensors
by sharing information.

Automotive Network dominos
o Class C:
• data rate (125kbps‐1Mbps)
• Example : high‐speed CAN
• used for power train and chassis domain functions (ABS & EPS)
o Class D:
• data rate (over 1Mbps)
• Example : MOST (media‐oriented system transport)
• multimedia data and safety critical applications .

Automotive Network Triggered
Event Triggered:
o Messages are transmitted due to occurrence of significant events
o Example :a door has been closed.
o No detection of node failure, no grantee for certain constrains.
Time Triggered:
o Frames are transmitted at predetermined points in time .
o Example: TDMA.
o Behavior is fully predictable, detection of failure. but, inefficient
utilization, not extendable.


















