ELEMENTS OF MECHANICAL ENGINEERING - …airwalkbooks.com/images/pdf/pdf_56_1.pdf · (vi) Propped...
76
(For B.E./B.Tech Engineering Students) As per New Revised Syllabus of Dr. APJ Abdul Kalam Technical University - UP AIRWALK PUBLICATIONS (Near All India Radio) 80, Karneeshwarar Koil Street Mylapore, Chennai - 600 004. Ph.: 2466 1909, 94440 81904 Email: [email protected], [email protected] www.airwalkbooks.com Dr. S. Ramachandran, M.E., Ph.D., ELEMENTS OF MECHANICAL ENGINEERING Saswath Kumar Das, HOD - Mechanical Engineering Dr. D.R. Somashekar, M.E., Ph.D Director IIMT College of Engineering, GREATER NOIDA - 201308 (UP)
Transcript of ELEMENTS OF MECHANICAL ENGINEERING - …airwalkbooks.com/images/pdf/pdf_56_1.pdf · (vi) Propped...

(For B.E./B.Tech Engineering Students)
As per New Revised Syllabus ofDr. APJ Abdul Kalam Technical University - UP
AIRWALK PUBLICATIONS
(Near All India Radio)
80, Karneeshwarar Koil Street
Mylapore, Chennai - 600 004.
Ph.: 2466 1909, 94440 81904
Email: [email protected],
www.airwalkbooks.com
Dr. S. Ramachandran, M.E., Ph.D.,
ELEMENTS OFMECHANICAL ENGINEERING
Saswath Kumar Das,HOD - Mechanical Engineering
Dr. D.R. Somashekar, M.E., Ph.D
DirectorIIMT College of Engineering,
GREATER NOIDA - 201308 (UP)
thFirst Edition: 9 August 2017
ISBN : 978-93-84893-76-7
Price :
ISBN:978-93-84893-76-7
www.airwalkbooks.com

ELEMENTS OF MECHANICAL ENGINEERING
UNIT-I:
Force System: Force, Parallelogram Law, Lami’s theorem, Principle of
Transmissibility of forces. Moment of a force, Couple, Varignon’s theorem,
Resolution of a force into a force and a couple. Resultant of coplanar force
system. Equilibrium of coplanar force system, Free body diagrams,
Determination of reactions. Concept of Centre of Gravity and Centroidand
Area Moment of Inertia, Perpendicular axis theorem and Parallel axis theorem
UNIT-II:
Plane Truss: Perfect and imperfect truss, Assumptions and Analysis of Plane
Truss by Method of joints and Method of section.
Beams: Types of beams, Statically Determinate Beams, Shear force and
bending moment in beams, Shear force and bending moment diagrams,
Relationships between load, shear and bending moment.
UNIT-III:
Simple stress and strain: Normal and shear stresses. One Dimensional
Loading; members of varying cross section, bars in series. Tensile Test
diagram for ductile and brittle materials, Elastic constants, Strain energy.
Bending (Flexural) Stresses: Theory of pure bending, neutral surface and
neutral axis, stresses in beams of different cross sections. Engineering
Materials: Importance of engineering materials, classification, mechanical
properties and applications of Ferrous, Nonferrous and composite materials.
UNI-IV:
Basic Concepts and Definitions of Thermodynamics: Introduction and
definition of thermodynamics, Microscopic and Macroscopic approaches,
System, surrounding and universe, Concept of continuum, Thermodynamic
equilibrium, Thermodynamic properties, path, process and cycle, Quasi static
process, Energy and its forms, Work and heat. Thermodynamic definition of
work.
Syllabus S.1

Zeroth law of thermodynamics: Temperature and its’ measurement.
First law of thermodynamics: First law of thermodynamics, Internal energy
and enthalpy. First law analysis for non-flow processes.
Non-flow work Steady flow energy equation; Boilers, Condensers, Turbine,
Throttling process, Pumps etc.
UNIT-V:
Second law: Thermal reservoir, Kelvin Planck statement, Heat engines,
Efficiency; Clausius’ statement Heat pump, refrigerator, Coefficient of
Performance. Carnot cycle, Carnot theorem and it’s corollaries.Clausius
inequality, Concept of Entropy.
Properties of pure substances: P-v, T-s and h-s diagram, dryness fraction
and steam tables. Rankine Cycle.
Internal Combustion Engines: Classification of I.C. Engines and their parts,
working principle and comparison between 2 Stroke and 4 stroke engine ,
difference between SI and CI engines. Pv and T-s diagramsof Otto and Diesel
cycles, comparison of efficiency.
S.2 Elements of Mechanical Engineering www.airwalkpublications.com

Contents
Chapter 1
Force System - Centroid and Moment of Inertia
1.1 Engineering Mechanics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.1
1.2 Classification of Engineering Mechanics . . . . . . . . . . . . . . . . . . . . . . 1.2
1.3 Fundamental Concepts of Mechanics . . . . . . . . . . . . . . . . . . . . . . . . . 1.3
1.4 Scalar and Vector Quantities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.4
1.5 Laws of Mechanics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.5
1.5.1 Newton’s Three Fundamental Laws . . . . . . . . . . . . . . . . . . . . 1.5
1.5.2 Newton’s Law of Gravitation . . . . . . . . . . . . . . . . . . . . . . . . . 1.6
1.5.3 The Parallelogram Law of Forces . . . . . . . . . . . . . . . . . . . . . 1.7
1.5.4 Triangular Law of Forces . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.8
1.5.5 Polygon Law of Forces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.9
1.5.6 Law (or) Principle of Transmissibility of Forces . . . . . . . . 1.10
1.6 Force and Force System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.11
1.6.1 Types of forces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.12
1.6.2 Types of force system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.13
(I) Coplanar force system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.14
(a) Concurrent forces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.14
(b) Coplanar - concurrent force system. . . . . . . . . . . . . . . . . . . . . . . 1.14
(c) Non concurrent and non-parallel forces. . . . . . . . . . . . . . . . . . . . 1.14
(d) Coplanar - Non concurrent forces . . . . . . . . . . . . . . . . . . . . . . . . 1.15
(e) Collinear forces. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.15
(f) Parallel forces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.15
II Non coplanar force system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.16
(a) Non coplanar concurrent forces . . . . . . . . . . . . . . . . . . . . . . . . . . 1.16
(b) Non coplanar Non concurrent forces. . . . . . . . . . . . . . . . . . . . . . 1.17
(c) Non coplanar parallel forces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.17
(d) Non coplanar Non concurrent and Non parallel forces
(skew forces) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.17
1.7 Composition of Forces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.18
1.7.1 Resultant of two coplanar concurrent forces . . . . . . . . . . . . 1.18
Contents C.1

I. Analytical method - Parallelogram law of forces. . . . . . . . . . . . . 1.18
II Analytical Method – Triangle Law of Forces . . . . . . . . . . . . . . . 1.20
III Graphical method - Parallelogram law of forces . . . . . . . . . . . . 1.21
IV Graphical method - Triangle law of forces. . . . . . . . . . . . . . . . . 1.21
1.7.2 Resolution of Forces. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.23
1.7.3 Resultant of Coplanar Force System - (Method of
projections) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.24
1.7.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.26
1.8 Equilibrium of Coplanar Force System. . . . . . . . . . . . . . . . . . . . . . . 1.35
1.8.1 Equilibrant . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.35
1.8.2 Equations of Equilibrium of a particle. . . . . . . . . . . . . . . . . 1.36
1.9 Free Body Diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.37
1.9.1 Free body diagram in simple words. . . . . . . . . . . . . . . . . . . 1.37
1.10 Equilibrium Of A Three Force Body . . . . . . . . . . . . . . . . . . . . . . . 1.42
1.11 Condition For Three Forces In Equilibrium. . . . . . . . . . . . . . . . . . 1.43
1.11.1 Lami’s Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.43
1.12 Graphical Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.61
1.13 Moment of a Force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.65
1.13.1 Principle of Moments (or) Varignon’s theorem . . . . . . . . 1.66
1.13.2 General Case of Parallel Forces in a Plane . . . . . . . . . . . 1.67
1.13.3 Solved Problems in Varignon’s theorem . . . . . . . . . . . . . . 1.68
1.14 Couple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.71
1.14.1 Moment of a Couple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.71
1.14.2 Equivalent couples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.72
1.15 Resolution of a Given Force Into a Force and a Couple :
Force - Couple System. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.72
1.16 Support and Determination of Reactions . . . . . . . . . . . . . . . . . . . . 1.80
1.16.1 Types of Supports. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.81
1.16.2 Problems for determination of reactions . . . . . . . . . . . . . . 1.85
1.17 Equivalent Force System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.90
1.17.1 Resultant of Force and Couple System . . . . . . . . . . . . . . . 1.90
1.18 Centre of Gravity or Centroid . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.102
C.2 Elements of Mechanical Engineering www.airwalkpublications.com

1.18.1 First Moment of Area . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.102
1.18.2 Centroid of a Uniform Lamina . . . . . . . . . . . . . . . . . . . . . 1.103
1.18.3 Centre of Gravity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.104
1.18.4 Problems on Centroids of composite plane figures
and curves . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.107
1.19 Theorems of Pappus and Guldinus . . . . . . . . . . . . . . . . . . . . . . . . 1.124
1.19.1 Surface of Revolution . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.124
1.19.2 Volume of Revolution . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.125
1.19.3 Pappus-Guldinus Theorem I . . . . . . . . . . . . . . . . . . . . . . . 1.125
1.19.4 Pappus-Guldinus Theorem II . . . . . . . . . . . . . . . . . . . . . . . 1.125
1.20 Area Moment of Inertia (Second Moment of Area) . . . . . . . . . . 1.126
1.20.1 Perpendicular Axis theorem. . . . . . . . . . . . . . . . . . . . . . . . 1.126
1.21 Polar Moment of Inertia and Perpendicular Axis Theorem . . . . 1.127
1.21.1 Perpendicular Axis theorem. . . . . . . . . . . . . . . . . . . . . . . . 1.127
1.22 Radius of Gyration of an Area . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.127
1.23 Parallel Axis Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.129
1.24 Problems on Moment of Inertia . . . . . . . . . . . . . . . . . . . . . . . . . . 1.130
1.25 Moment of Inertia of Composite Section . . . . . . . . . . . . . . . . . . . 1.138
1.26 Mass Moment of Inertia of Cylinder and thin Disc . . . . . . . . . . 1.151
1.26.1 Parallel Axis Theorem1.151
1.27 Problems on Mass Moment of Inertia . . . . . . . . . . . . . . . . . . . . . 1.154
Chapter - 2
PLANE TRUSSES AND BEAMS2.1 Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.1
2.2 The Classifications of Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2
2.2.1 Frame . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2
2.2.2 Truss . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2
2.2.3 Classification of Dimensional configuration . . . . . . . . . . . . . 2.3
2.2.4 Classification of Determinacy . . . . . . . . . . . . . . . . . . . . . . . . . 2.3
2.2.5 Classification of supports . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.4
2.3 Perfect Truss . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.4
Contents C.3

2.3.1 Mathematical equation for perfect truss . . . . . . . . . . . . . . . . . 2.4
2.3.2 Imperfect truss. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.5
2.4 Assumptions and Analysis of Plane Truss . . . . . . . . . . . . . . . . . . . . . 2.5
2.5 Trusses For Various Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.6
2.6 Analysis of Forces in a Truss . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.7
2.6.1 Determination of the reactions at the supports . . . . . . . . . . . 2.7
2.6.2 Determination of the internal forces in the members of the
frame . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.7
2.6.3 Analytical method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.7
2.6.4 Method of joints . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.8
Problems on Method of Joints . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.9
2.6.5 Method of sections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.18
2.7 Beams . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.35
2.8 Types of Beams. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.35
(i) Simply supported Beam: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.35
(ii) Cantilever Beam: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.36
(iii) Overhanging Beam: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.36
(iv) Fixed Beam: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.36
(v) Continuous Beam: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.37
(vi) Propped Cantilever Beam: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.37
2.9 Diagrammatic Conventions for Supports and Loading . . . . . . . . . . 2.38
2.9.1 Supports and Support Reactions . . . . . . . . . . . . . . . . . . . . . . 2.38
2.9.2 Types of Supports and their Reactions . . . . . . . . . . . . . . . . 2.38
(i) Simple support or Knife Edge support . . . . . . . . . . . . . . . . . . . . 2.39
(ii) Roller Support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.39
(iii) Hinge or Pin-Jointed support. . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.39
(iv) Fixed or built-in support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.40
(v) Smooth surface support or Frictionless support . . . . . . . . . . . . . 2.41
2.9.3 Static Equilibrium Equations . . . . . . . . . . . . . . . . . . . . . . . . . 2.42
2.9.4 Determinate and Indeterminate Beams . . . . . . . . . . . . . . . . . 2.42
2.9.5 Types of Loading in Beams . . . . . . . . . . . . . . . . . . . . . . . . . 2.43
(a) Point or Concentrated load . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.43
(b) Uniformly Distributed Load (UDL) . . . . . . . . . . . . . . . . . . . . . . . 2.43
C.4 Elements of Mechanical Engineering www.airwalkpublications.com

(c) Uniformly Varying Load (UVL) . . . . . . . . . . . . . . . . . . . . . . . . . 2.44
2.10 Shear Force in Beams (S.F). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.45
2.11 Sign Convention for Shear Force In Beam . . . . . . . . . . . . . . . . . . 2.46
2.12 Couple or Moment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.47
2.13 Bending Moment in Beams . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.48
2.14 Sign Convention for Bending Moment In Beams . . . . . . . . . . . . . 2.49
2.15 Shear Force (S.F) And Bending Moment (B.M) diagrams . . . . . 2.49
2.16. Relationship Between Load, Shear force and Bending Moment 2.51
2.17 Method of Drawing Shear Force and Bending Moment Diagrams by
Summation Approach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.52
2.18 Points to be Remembered for Drawing S.F.D and B.M.D . . . . . 2.52
Chapter 3
Simple Stress and Strain, Bending Stresses andEngineering Materials
3.1 Simple Stress and Strain. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.1
3.1.1 Stress . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.1
3.1.2 Unit of Stress . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2
3.1.3 Strain . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3
3.2 Normal and Shear Stresses. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3
3.2.1 Normal Stress: Axially Loaded Bar . . . . . . . . . . . . . . . . . . . . 3.3
3.2.2 Tensile Stress and Tensile Strain . . . . . . . . . . . . . . . . . . . . . . 3.4
3.2.3 Compressive Stress and Compressive Strain . . . . . . . . . . . . . 3.5
3.2.4 Shear Stress and Shear Strain . . . . . . . . . . . . . . . . . . . . . . . . . 3.6
3.3 BEaring Stress (crushing Stress) In Connections. . . . . . . . . . . . . . . . 3.8
3.4 Stress-strain Diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.8
3.4.1 Stress-Strain Curve (Tensile Test diagram) for Ductile
Materials. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.8
3.4.2 Stress-Strain Curves (Tensile test diagram) for Brittle
Materials. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.11
3.4.3 Stress Strain Curves (Compression) . . . . . . . . . . . . . . . . . . . 3.12
3.5 Hooke’s Law - Axial & Shear Deformation . . . . . . . . . . . . . . . . . . 3.12
Contents C.5
3.5.1 Factor of Safety . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.13
3.5.2 Deformation of a body due to force acting on it . . . . . . . 3.13
3.5.3 Significance of percentage of Elongation & Reduction in Area
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.14
3.6 One Dimensional Loading Deformation In Simple Bar
Subjected to Axial Load . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.23
3.7 Deformation for a Bar of Varying Cross Section and Bars
in Series. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.24
3.8 Principle of Superposition. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.37
3.9 Stress in Bars of Uniformly Tapering Cross Section . . . . . . . . . . . 3.44
3.10 Deformation of Uniformly Tapering Rectangular Bar . . . . . . . . . 3.47
3.11 Deformation in Compound or Composite Bars . . . . . . . . . . . . . . . 3.49
3.12 Strain Energy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.59
3.13 Strain Energy In Pure Shearing . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.73
3.13.1 Expression for strain energy stored in a body due to shear
stress. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.73
3.14 Elastic Constants . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.75
3.14.1 Modulus of Elasticity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.75
3.14.2 Rigidity Modulus (or) Shear Modulus . . . . . . . . . . . . . . . . 3.75
3.14.3 Bulk Modulus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.75
3.14.4 Linear Strain and Lateral Strain . . . . . . . . . . . . . . . . . . . . . 3.75
3.14.5 Poisson’s ratio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.76
3.15 Biaxial And Triaxial Deformations . . . . . . . . . . . . . . . . . . . . . . . . . 3.78
3.16 Volumetric Strain. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.81
3.16.1 Rectangular Body Subjected to Axial Loading. . . . . . . . . 3.81
3.17 Rectangular Bar Subjected to 3 Mutually perpendicular Forces . 3.83
3.18 Cylindrical Rod Subjected to Axial Load . . . . . . . . . . . . . . . . . . . 3.85
3.19 Bulk Modulus. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.86
3.20 Relationship Between Elastic Constants . . . . . . . . . . . . . . . . . . . . . 3.86
3.20.1 Relation between Bulk Modulus and Young’s Modulus . 3.86
3.20.2 Shear Stress and Strain . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.88
C.6 Elements of Mechanical Engineering www.airwalkpublications.com

3.20.3 Shear Modulus or Modulus of Rigidity3. . . . . . . . . . . . . . . .88
3.20.4 Relation between Modulus of Elasticity and Modulus of
Rigidity. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.88
3.21 Bending (flexural) Stresses In Beams - Theory of Pure Bending 3.95
3.21.1 Simple Bending (or) Pure Bending . . . . . . . . . . . . . . . . . . 3.95
3.21.2 Assumption in Theory of Simple Bending . . . . . . . . . . . . 3.95
3.21.3 Theory of simple bending - Bending stress equation (or)
Flexural Formula Derivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.96
3.21.4 Limitations in Theory of Simple Bending: . . . . . . . . . . . . 3.98
3.22 Stresses In Beams of Different Cross Sections . . . . . . . . . . . . . . . 3.99
3.22.1 Section modulus or Modulus of section . . . . . . . . . . . . . . 3.99
3.23 Flexural Strength of A Section . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.100
3.24 Engineering Materials . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.117
3.24.1 Importance of Engineering Materials . . . . . . . . . . . . . . . . 3.117
3.24.2 Classification of Engineering materials . . . . . . . . . . . . . . 3.117
3.25 Metals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.118
3.25.1 Ferrous Metals. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.118
3.25.2 Non-Ferrous metals. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.118
3.26 Mechanical Properties of Materials . . . . . . . . . . . . . . . . . . . . . . . . 3.120
3.27 Mechanical Properties And Applications of Ferrous, Non
Ferrous And Composite Materials . . . . . . . . . . . . . . . . . . . . . . . . 3.123
3.28 Steel. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.123
3.28.1 Effect of alloying additions on steel . . . . . . . . . . . . . . . . 3.123
3.29 Stainless Steels. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.126
3.29.1 Properties of Stainless Steels. . . . . . . . . . . . . . . . . . . . . . . 3.126
3.29.2 Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.127
3.30 Tool Steels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.127
3.30.1 Properties of tool steels . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.127
3.31 High Strength Low Alloy Steels (hsla Steels) . . . . . . . . . . . . . . . 3.127
3.31.1 Applications of HSLA . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.128
3.32 Maraging Steels (ultra High Strength Steels). . . . . . . . . . . . . . . . 3.128
Contents C.7
3.32.1 Properties of Maraging Steels . . . . . . . . . . . . . . . . . . . . . . 3.128
3.32.2 Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.128
3.33 Cast Iron3.129
3.33.1 Composition of cast iron . . . . . . . . . . . . . . . . . . . . . . . . . . 3.129
3.33.2 Types of Cast Iron . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.129
1. Grey cast iron . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.129
2. White cast iron. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.130
3. Malleable Cast Iron . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.131
4. Spheroidal Graphite Cast Iron: (Ductile iron (or) Nodular iron) . . 3.131
5. Alloy Cast Iron . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.132
3.34 Non Ferrous Metals. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.133
3.35 Aluminium And Aluminium Alloys . . . . . . . . . . . . . . . . . . . . . . 3.133
3.35.1 Aluminium . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.133
3.35.2 Aluminium alloys Classification . . . . . . . . . . . . . . . . . . . . 3.134
3.36 Copper And Copper Alloys . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.135
3.36.1 Classification of Copper alloys . . . . . . . . . . . . . . . . . . . . . 3.136
3.37 Bearing Alloys . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.137
3.38 Non - Metallic Materials . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.138
3.38.1 Polymers. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.138
3.38.2 Classification of Polymers . . . . . . . . . . . . . . . . . . . . . . . . . 3.138
1. Thermoplastic polymers. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.139
2. Thermosetting Polymers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.139
3.38.3 Commodity and Engineering Polymers . . . . . . . . . . . . . . 3.140
3.39 Plastics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.140
3.40 Properties and Applications of Some Common Thermoplastics 3.142
3.41 Properties and Applications of Some Common Thermosetting
Polymers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.143
3.42 Elastomer (or) Rubber . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.143
1. Natural Rubber . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.143
2. Synthetic Rubbers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.144
3.43 Ceramics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.144
C.8 Elements of Mechanical Engineering www.airwalkpublications.com

3.43.1 Classification of Ceramic Materials on the Basis of
Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.146
3.44 Glasses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.146
3.45 Clay Products . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.147
3.46 Refractory Materials . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.147
3.47 Cements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.148
3.48 Composite Materials (or) Composites . . . . . . . . . . . . . . . . . . . . . . 3.149
3.48.1 Classification of Composites . . . . . . . . . . . . . . . . . . . . . . . 3.149
Chapter 4
Basic Concepts, Zeroth Law andFirst Law of Thermodynamics
4.1 Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.1
4.2 Role of Thermodynamics in Engineering and Science . . . . . . . . . . . 4.2
4.3 Applications of Thermodynamics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.2
4.4 Basic Concepts. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.3
4.5 Macroscopic And Microscopic Approaches . . . . . . . . . . . . . . . . . . . . 4.8
4.5.1 Macroscopic approach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.8
4.5.2 Microscopic approach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.8
4.6 Concept of Continuum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.9
4.7 Thermodynamic System, Surroundings and Universe . . . . . . . . . . . 4.10
4.8 Types of System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.10
4.9 Closed System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.10
4.10 Open System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.11
4.11 Isolated System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.12
4.12 Homogeneous and Heterogeneous Systems . . . . . . . . . . . . . . . . . . 4.12
4.13 Property. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.13
4.14 State, Path and Process. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.14
4.15 Cycle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.15
4.16 Thermodynamic Equilibrium. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.16
4.17 Quasi-static (or) Quasi–equilibrium Process . . . . . . . . . . . . . . . . . . 4.16
4.18 Energy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.18
Contents C.9

4.18.1 Different forms of energy . . . . . . . . . . . . . . . . . . . . . . . . . . 4.18
4.19 Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.19
4.20 Work Transfer - A Path Function. . . . . . . . . . . . . . . . . . . . . . . . . . 4.20
4.21 Different Modes of Work. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.21
4.21.1 Electrical work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.21
4.21.2 Shaft Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.22
4.21.3 Spring Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.23
4.21.4 Paddle wheel work (or) Stirring work . . . . . . . . . . . . . . . . 4.25
4.21.5 Flow Work. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.25
4.21.6 Workdone on Elastic solid bars . . . . . . . . . . . . . . . . . . . . . 4.26
4.21.7 Work Associated with the stretching of a Liquid Film. . 4.27
4.21.8 Workdone per unit volume on a magnetic material. . . . . 4.28
4.22 Heat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.29
4.22.1 Heat Transfer – A Path Function . . . . . . . . . . . . . . . . . . . . 4.30
4.23 Thermodynamic Definition Of Work . . . . . . . . . . . . . . . . . . . . . . . 4.31
4.24 Zeroth Law Of Thermodynamics. . . . . . . . . . . . . . . . . . . . . . . . . . . 4.31
4.24.1 Equality of temperature . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.32
4.25 Temperature and its Measurements . . . . . . . . . . . . . . . . . . . . . . . . . 4.32
4.25.1 Thermometry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.32
4.25.2 Applications of thermometry . . . . . . . . . . . . . . . . . . . . . . . . 4.32
4.26 First Law of Thermodynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.33
4.26.1 Joules experiment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.34
4.26.2 Perpetual motion of machine of first kind-I . . . . . . . . . . . 4.35
4.26.3 Internal Energy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.36
4.26.4 Enthalpy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.37
4.27 Application of First Law To Non-flow Process (or) Closed
System. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.37
4.27.1 Constant Volume Process. . . . . . . . . . . . . . . . . . . . . . . . . . . 4.38
4.27.2 Constant Pressure Process (or) isobaric Process . . . . . . . . 4.41
4.27.3 Constant Temperature Process (or) isothermal Process . . 4.44
4.27.4 Reversible Adiabatic Process (or) isentropic Process . . . . 4.48
C.10 Elements of Mechanical Engineering www.airwalkpublications.com

4.27.5 Polytropic process: PVn constant n n . . . . . . . . . . . . 4.52
4.28 Steady Flow Energy Equation: Application of First Law to Steady
Flow Process (Open System) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.93
4.28.1 Applications of first law . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.97
4.28.1.1 Nozzle: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.97
4.28.1.2 Diffusor: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.97
4.28.1.3 Throttling Device: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.98
4.28.1.4 Turbine: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.99
4.28.1.5 Compressor: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.101
4.28.1.6 Heat Exchanger: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.102
Chapter 5
Second Law, Properties of Pure substances and IC Engines5.1 Introduction to the Second Law of Thermodynamics . . . . . . . . . . . . 5.1
5.2 Thermal Energy Reservoirs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.2
5.3 Heat Engines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.3
5.3.1 Heat Engine Cycle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.4
5.4 The Second Law of Thermodynamics: Kelvin-planck Statement . . 5.6
5.5 The Second Law of Thermodynamics: Clausius Statement . . . . . . . 5.7
5.6 Refrigerators and Heat Pumps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.8
5.6.1 Refrigerator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.8
5.6.2 Heat Pump . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.9
5.7 Coefficient Of Performance - COP . . . . . . . . . . . . . . . . . . . . . . . . . . 5.10
5.8 Carnot Cycle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.11
Process 4-1 Isentropic Compression Process . . . . . . . . . . . . . . . . 5.17
5.9 Reversed Carnot Cycle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.18
5.10 The Carnot Principles (or) Carnot Theorem . . . . . . . . . . . . . . . . . 5.19
5.11 Reversed Heat Engines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.23
5.12 Corollaries of Carnot’s Theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.26
5.13 Clausius Inequality. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.26
5.14 Concept of Entropy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.33
5.14.1 Characteristics of entropy. . . . . . . . . . . . . . . . . . . . . . . . . . . 5.35
Contents C.11

5.14.2 Entropy Transfer with Heat Flow. . . . . . . . . . . . . . . . . . . . 5.37
5.15 Properties of Pure Substances . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.38
5.15.1 Thermodynamic properties of pure substances in solid, liquid
and vapour phases . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.39
5.16 Property Diagrams for Phase-Change Processes . . . . . . . . . . . . . . 5.42
5.16.1 T-v Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.42
5.16.2 P v Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.45
5.16.3 P-T Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.47
5.16.4 T-s Diagram. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.48
5.16.5 h s Diagram or Mollier Diagram . . . . . . . . . . . . . . . . . . . 5.50
5.17 Thermodynamic Properties of Steam. . . . . . . . . . . . . . . . . . . . . . . . 5.53
5.18 Standard Rankine Cycle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.75
5.18.1 The Ideal Cycle for Vapour Power Cycles . . . . . . . . . . . . 5.75
5.18.2 Efficiency of Standard Rankine Cycle . . . . . . . . . . . . . . . . 5.77
5.19 Introduction to IC Engines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.87
5.20 Basic Terms Connected with I.C. Engines. . . . . . . . . . . . . . . . . . . 5.88
5.21 Classification of IC Engines. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.90
5.22 Four Stroke SI (Petrol) Engine . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.91
5.23 Four Stroke CI (diesel) Engine . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.93
5.24 Working of Two Stroke Cycle Engine . . . . . . . . . . . . . . . . . . . . . . 5.95
5.25 Working of Two Stroke Petrol Engine. . . . . . . . . . . . . . . . . . . . . . 5.96
Two Stroke Cycle Compression Ignition Engine . . . . . . . . . . . . . 5.97
5.26 IC Engine Components – Functions and Materials. . . . . . . . . . . . 5.98
5.27 Comparison Of Four-stroke and Two Stroke Cycle engines . . . 5.103
5.28 Otto Cycle (or) Constant Volume Cycle . . . . . . . . . . . . . . . . . . . 5.106
5.29 Diesel Cycle or Constant Pressure Cycle . . . . . . . . . . . . . . . . . . . 5.111
5.30 Comparison of Efficiency . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.142
C.12 Elements of Mechanical Engineering www.airwalkpublications.com
Chapter 1
Force System - Centroid and
Moment of Inertia
Force System: Force, Parallelogram Law, Lami’s theorem, Principle
of Transmissibility of forces. Moment of a force, Couple, Varignon’s theorem,
Resolution of a force into a force and a couple. Resultant of coplanar force
system. Equilibrium of coplanar force system, Free body diagrams,
Determination of reactions. Concept of Centre of Gravity and Centroid and
Area Moment of Inertia, Perpendicular axis theorem and Parallel axis
theorem.
1.1 ENGINEERING MECHANICS
The different motions that we notice, everyday, like balls bouncing or
wheels rolling, are interaction of different bodies and effect of forces acting
on them - the study is called mechanics. It can be defined as that science
which describes and predicts the condition of rest or motion of bodies under
the action of forces. Mechanics is divided into three major parts.
1. Mechanics of rigid bodies
2. Mechanics of deformable bodies
3. Mechanics of fluids
Mechanics, when applied in engineering is called Engineering
mechanics which concerns itself mainly with the application of the principles
of mechanics to the solution of problems commonly encountered in the field
of engineering practice. Thus, Engineering mechanics is the study of forces
and motion of bodies in mechanisms.
Force System-Centroid and Moment of Inertia 1.1

1.2 CLASSIFICATION OF ENGINEERING MECHANICSEngineering mechanics may be classified based upon the type or nature
of the body involved and is shown in Fig. 1.1.
A particle is defined as an idealized model of actual physical body of
real world, as an entity having only mass and location in space. Its dimensions
are negligible when compared with the distances involved in the discussion
of its motion.
Rigid body
Rigid body is one which can retain its shape, size or one which does
not undergo any deformation under the loads. It is a combination of a large
number of particles which occupy fixed positions with respect to each other
both before and after applying a load.
A rigid body is one which does not deform under load. However, actual
bodies are not absolutely rigid and deform slightly. Since such slight
deformations do not affect the conditions of equilibrium or motion, they are
neglected in the study of rigid bodies.
M echan icso f solids
M echan icso f fluid
R ig idbod ies
Deformablebod ies
Statics Dynam ics
Kine tics K inem atics
Strength ofM aterials
Theory o fE lasticity
Theory o fP lasticity
Idea lfluid
V iscousfluid
Compressib le fluid
Engineering M echan ics
Fig. 1.1 Classification of Engineering Mechanics
1.2 Elements of Mechanical Engineering www.airwalkpublications.com

Rigid body mechanisms found a suitable basis for the analysis anddesign of structural, mechanical or electrical engineering devices and aredivided into two areas - Statics and Dynamics. Dynamics is further dividedinto Kinetics and Kinematics.
Statics is branch of mechanics which deals with the force and itseffects on bodies at rest. The configuration of different forces is such thatthe resultant force on the system is zero.
Dynamics is branch of mechanics which deals with the force and itseffects on bodies in motion.
Kinetics is the branch of mechanics which deals with the body inmotion when the forces which cause the motion are considered.
Kinematics is the branch of mechanics which deals with the body inmotion, when the forces causing the motion are not considered.
Deformable bodies are one which undergoes deformation underapplication of forces. The branch of mechanics which deals with the studyof internal force distribution, stress and strain developed in the bodies is calledmechanics of deformable bodies or mechanics of materials.
Fluid mechanics is the branch of mechanics which deals with studyof fluids both liquids and gases at rest or in motion.
1.3 FUNDAMENTAL CONCEPTS OF MECHANICS
The basic concepts used in everyday mechanics are based on newtonianmechanics. The basic concepts used in newtonian mechanics are space, time,mass and force. These are absolute concepts because they are independentof each other.
Space is a geometric region in which events involving bodies occur.Space is associated with the position of a point P. The position of P can bedefined by three lengths measured from a certain reference point or origin inthree given directions. These lengths are known as coordinates of P.
Time is a measure of the succession of events. The standard unit used
for its measurement is the second s, which is based on duration.
Mass is used to characterize and compare bodies on the basis of certainfundamental mechanical experiments. Two bodies of the same mass, will beattracted by the earth in the same manner and, they will also offer sameresistance to a change in translation motion. Mass is quantitative measure ofinertia. Mass of a body is constant regardless of its location.
Force System-Centroid and Moment of Inertia 1.3

Force is the action of one body on another. Each body tends to move
in the direction of external force acting on it. A force is characterized by its
point of application, its magnitude and its direction. A force is represented
by a vector. Simply force is push or pull, which by acting on a body changes
or tends to change its state of rest or motion.
Weight is the force with which a body is attracted towards the centre
of earth by the gravitational pull. The relation between the mass and weight
of a body is given in the equation 1.1.
Weight (W) mass (m) gravity (g) ... (1.1)
where
W weight in Newton
m mass of body in kg
g acceleration due to gravity i.e 9.81 m/s2
1.4 SCALAR AND VECTOR QUANTITIESScalar quantities are those
physical quantities that have only
magnitude but no direction. eg. mass,
time, volume, etc.
Vector quantities are those
physical quantities that have both
magnitude and direction. eg.
Displacement, velocity, acceleration,
momentum, force, etc.
A vector is represented
graphically as shown in Fig. 1.2.
For mathematical operations involving vectors, the rules of vector
algebra should be applied.
Tail o f Vecto r
Head of Vector
Sense(arrow)
Line of Actio
n
Reference axisDirection
M agnitude (length )
Fig.1.2 Graphical representationof a vector
1.4 Elements of Mechanical Engineering www.airwalkpublications.com

1.5 LAWS OF MECHANICS
The study of mechanics rests on the following fundamental principlesbased on the experimental evidences.
(i) Newton’s three fundamental laws (First law, Second law, andThird law)
(ii) Newton’s Law of Gravitation
(iii) The principle of transmissibility of forces
(iv) The parallelogram law of addition of forces
(v) The triangular law of forces
(vi) The law of conservation of Energy
(vii) The principle of work and Energy
1.5.1 Newton’s Three Fundamental Laws
(a) Newton’s First Law
Newton’s first law states that — If the net force or the resultant forceacting on a particle is zero, the particle will remain at rest (if originally atrest) or will move with constant speed in a straight line (if originally inmotion).
Or in other words, Every particle continues in its state of rest or ofmotion in a straight line unless it is compelled to change that state by anexternal force imposed on the body.
So the first law is used to define the forces.
(b) Newton’s Second LawNewton’s second law states that — If the resultant force acting on a
particle is not zero, the particle will have an acceleration proportional to themagnitude of the resultant force and will move in the direction of this resultantforce.
F Resultant force or Net force
F ma
where m Mass of the body
a Acceleration of the body
This law is used to measure a force.
Force System-Centroid and Moment of Inertia 1.5

Newton’s Second Law in other words:
The rate of change of momentum of a body is directly proportional tothe imposed force and it takes place in the direction in which the force acts.
i.e., Force Rate of change of momentum
Now,
Momentum Mass Velocity
Rate of change of momentum
mass rate of change of velocity
Mass Acceleration
Force mass acceleration
i.e., F ddt
mv m dvdt
m a
F K ma
K Constant of proportionality 1 in S.I. units
(c) Newton’s Third Law
Each and every action (FORCE) has equal and opposite reaction.
This means that the forces of action and reaction between two bodies
are equal in magnitude but opposite in direction and have the same line of
action.
1.5.2 Newton’s Law of Gravitation
This states that two particles of mass M and m are mutually attracted
with equal and opposite forces F and F. This force F is defined as
follows:
F G Mm
r2
where r Distance between the two particles.
G Universal constant, also called the Constant of Gravitation. Refer
Fig 1.3(a).
1.6 Elements of Mechanical Engineering www.airwalkpublications.com

Example
The attraction of the earth on a
particle located on its surface. The force
F exerted by the earth on the particle is
known as weight W. By the law of
gravitation we have, W GMm
2,
Introducing the constant g GM
r2 , we
have
W mg
where W weight of the body in Newton N
m mass of the body in kg
g 9.81 m/sec2 acceleration due to gravity.
1.5.3 The Parallelogram Law of Forces
Construct a parallelogram using
a force P and a force Q as two sides
of the parallelogram. Now the diagonal
passing through A represents the
resultant force. This is called as
parallelogram law for addition of two
forces. Refer Fig 1.3 (b).
Or in other words
If two forces P and Q acting at a point A are represented by the
adjacent sides of a parallelogram, then the diagonal of the parallelogrampassing through that point of intersection represents the resultant.
Resultant R P2 Q2 2PQ cos
M
m
F
-F
r
Fig.1.3 (a)
A
Q
P
Fig.1.3(b)
Force System-Centroid and Moment of Inertia 1.7
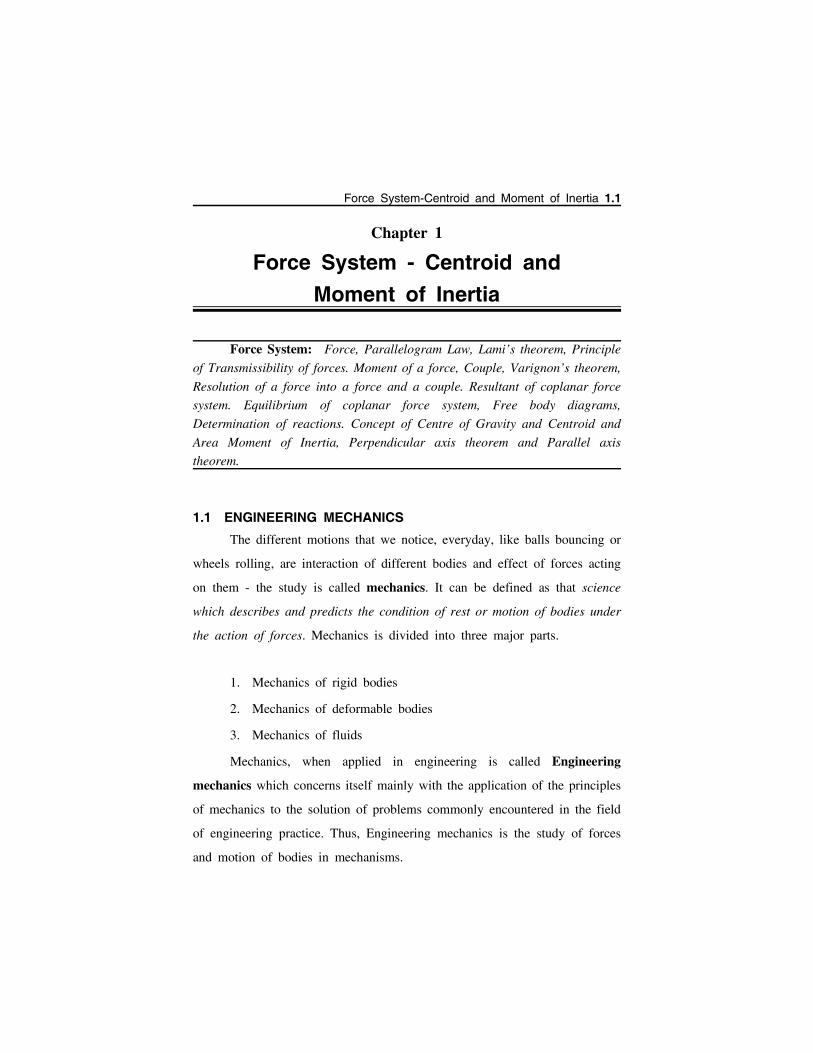
1.5.4 Triangular Law of ForcesIf two forces acting simultaneously on a body are represented by the
sides of a triangle taken in order, then their resultant is represented by the
closing side of the triangle taken in the opposite order.
Refer the Fig. 1.4 (a). The sum of two forces P and Q may be obtained
by arranging P and Q in tip to tail fashion and then connecting the tail of
P with tip of Q.
Addition of Two Vectors (Forces) P and Q [Refer Fig. 1.4 (a) and (b)]
Now P Q Q P. So addition of two forces is commutative.
The subtraction of a force is obtained by the addition of corresponding
negative force. The force P Q is obtained by adding to P with the negative
force Q as shown in Fig. 1.5 (a) & (b).
So, P Q P Q
PQ
Resultant P
+Q
P
Resulta
nt Q+P
change the order
Q
Even if we
we get sam e resultant
Fig.1.4.(a) (b)
P
Q
P- Q -Q
P
sub traction
P- QResu ltantFig.1.5.
(a) (b)
1.8 Elements of Mechanical Engineering www.airwalkpublications.com

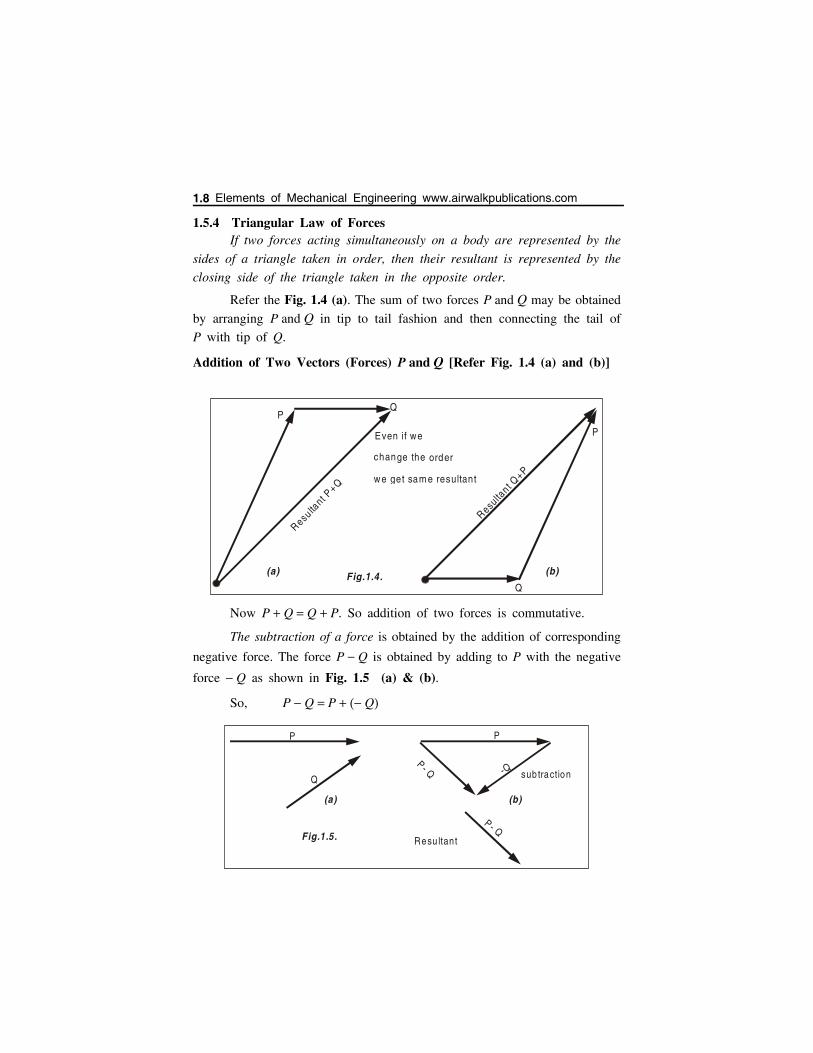
1.5.5 Polygon Law of Forces
If a number of concurrent forces acting simultaneously on a body, are
represented in magnitude and direction by the sides of a polygon taken in
order, then the resultant is represented in magnitude and direction by the
closing side of the polygon, taken in the opposite order.
Graphically arrange all the given forces in the tip-to-tail fashion in anyorder. Join the tail of the second force with the tip of the first force and so
on. To obtain the resultant, draw vector joining tail of first force and tip of
last force as shown in Fig. 1.6 (b).
Concurrent Forces acting on a body. Refer Fig. 1.6 (a)
By using Polygon Law of Forces
Vectorial Addition of
F1, F2, F3, F4, and F5 Resultant
This means: We can add the forces as in Fig 1.6 (b)
We can also add the forces as in Fig. 1.6 (c).
F2 F1 F4 F3 F5 Resultant.
Consider Fig. 1.6 (b) and 1.6 (c).
Here order is changed. Even then, we get the same resultant.
Hence, the resultant R does not depend upon the order in which the
forces are chosen to draw the polygon.
F5
Fig.1.6.(a)
F 5
F 2
F3
F4
Force System-Centroid and Moment of Inertia 1.9
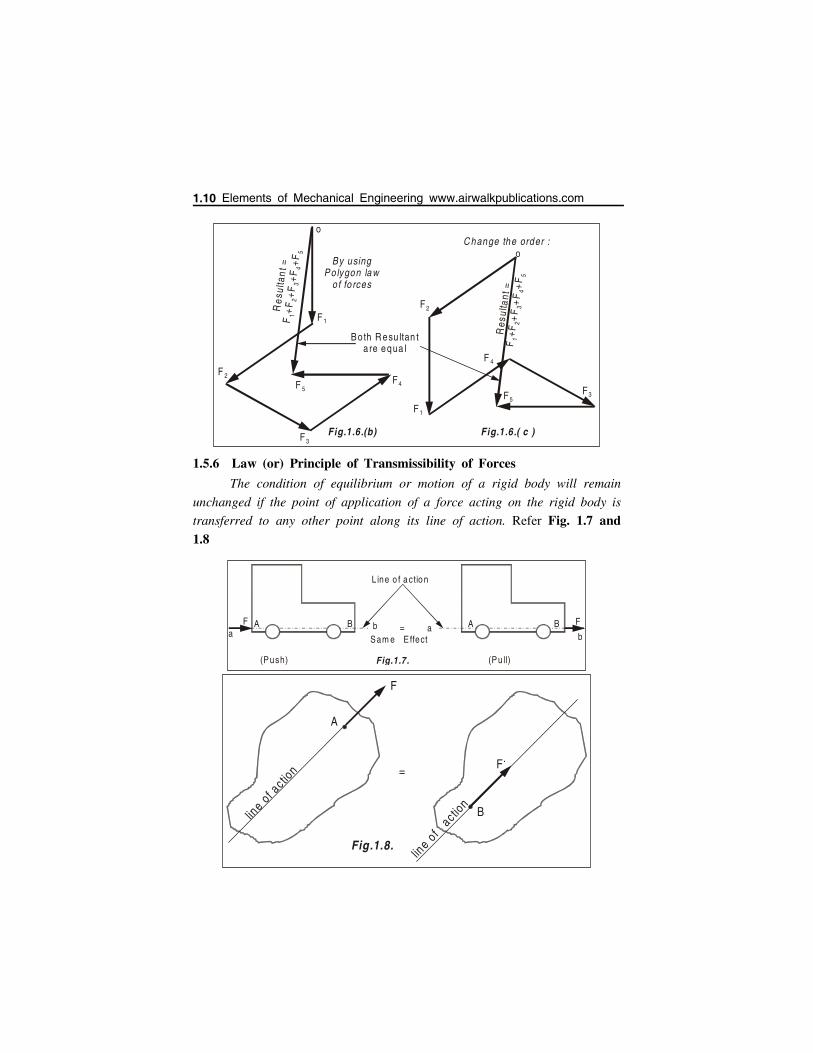
1.5.6 Law (or) Principle of Transmissibility of Forces
The condition of equilibrium or motion of a rigid body will remain
unchanged if the point of application of a force acting on the rigid body is
transferred to any other point along its line of action. Refer Fig. 1.7 and1.8
F 1
F 2
F3
F4F 5
By using Po lygon law
o f fo rces
o
F1
F2
F3
F 4
F5
Res
ult a
n t =
F
+ F+
F+
F+
F1
23
45
oC hange the order :
Res
ulta
nt =
F
+F
+ F+ F
+ F1
23
45
Bo th R esu ltan t a re equa l
Fig.1.6.(b) Fig.1.6.( c )
aF A B b a A B
b=
L ine o f a ctio n
F
Sam e E ffect
(Push) (Pu ll)Fig.1.7 .
A
line o
f ac tio
n
F
= F �
line o
f a
c tion
B
Fig.1.8.
1.10 Elements of Mechanical Engineering www.airwalkpublications.com
A force F acting on a body at point A is transferred to point B along
the same line of action without changing its net effect on the rigid body.
Principle of Transmissibility in other words (Refer Fig. 1.8)
Alternatively, the principle of transmissibility states that the conditions
of equilibrium or the motion of a rigid body will remain unchanged if a force
F acting at a given point ‘A’ of the rigid body is replaced by a force F of
the same magnitude and same direction, but acting at a different point ‘B’,provided that the two forces have the same line of action. The two forces
F and F have the same effect on the rigid body and are said to be equivalent.
1.6 FORCE AND FORCE SYSTEM
Force
Force is an action that changes or tends to change the state of the
body on which it acts. Simply, force is a push or pull on a body. Force
cannot be seen and only its effect on the object upon which it acts can be
felt. A force can also change or tend to change the size and shape of
deformable bodies.
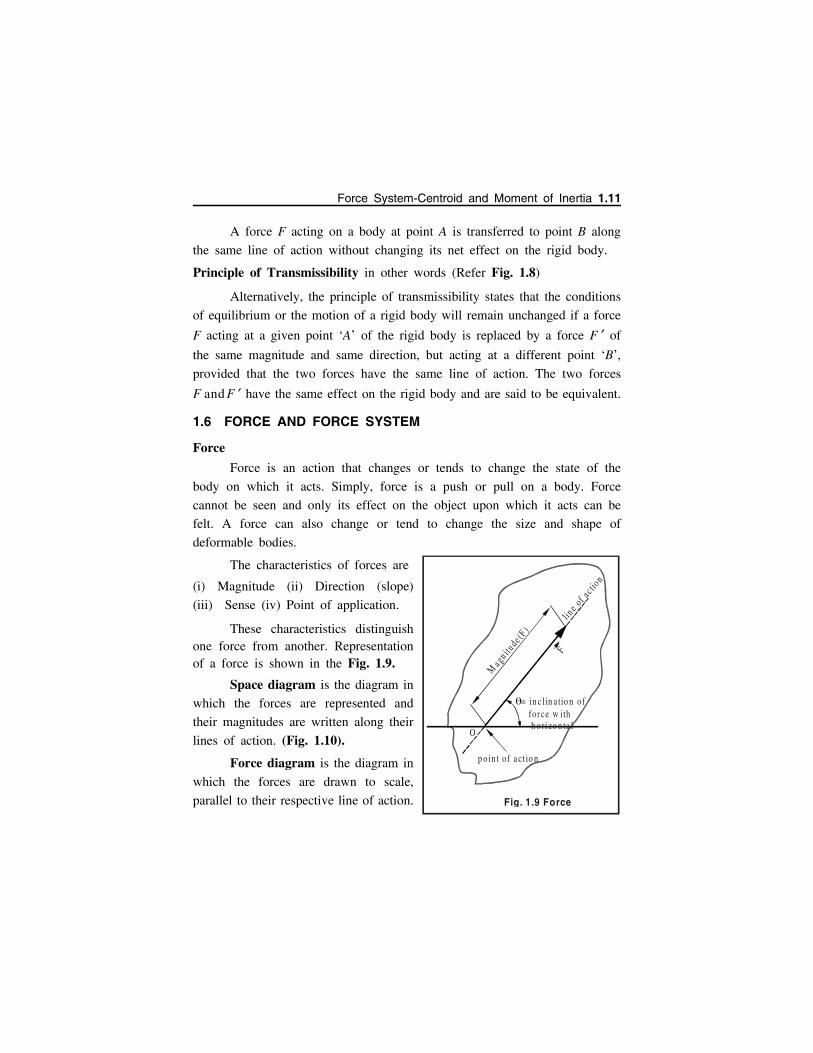
The characteristics of forces are
(i) Magnitude (ii) Direction (slope)
(iii) Sense (iv) Point of application.
These characteristics distinguishone force from another. Representationof a force is shown in the Fig. 1.9.
Space diagram is the diagram in
which the forces are represented and
their magnitudes are written along their
lines of action. (Fig. 1.10).
Force diagram is the diagram in
which the forces are drawn to scale,
parallel to their respective line of action.
O
p oin t o f a c t io n
= in c lin a tio n o f for ce w ith h o rizo n ta l
F
Magn
itude (F
)
l ine o
f ac tio
n
Fig. 1.9 Force
Force System-Centroid and Moment of Inertia 1.11

1.6.1 Types of forces
Forces may be classified as
(i) External forces (contacting or applied forces)
(ii) Body forces (non-contacting or non applied forces)
(a) External forces
Forces which act on a body due to external causes or agency are termed
as external forces. The external forces acting on the surface of a body are
called surface forces. The equilibrium of the body is affected by all the
external forces (body forces and contact forces) which act on the body.
A body pressing against another is
subjected to both normal and tangential force.
Normal force is perpendicular to the surface of
contact. The tangential force of the contact
surfaces is called frictional force.
The applied forces are further classified
as
(i) concentrated or point forces
(ii) Distributed forces
Point forces are those forces which act at specific points on the body.
Example - force exerted by wheels of vehicle on road. Fig. 1.11.
C
B
AA= 40N
C =20N
B= 30N
(a ) Sp ace diag ram
B
CB
AAC
(b) Fo rce diag ramFig 1.10
Body
F 3
F 2
F1
Fig 1.11 Point force
1.12 Elements of Mechanical Engineering www.airwalkpublications.com

Distributed forces are those forces which are distributed over definiteareas of surface of the body. Example - a beam of a ceiling or a floor Fig. 1.12.
(b) Body forcesThe external forces acting on each and every particle of a body are
termed as body force or volume force. Examples are gravitational pull on allphysical bodies, magnetic force, etc.
If the force acting on an area of specific size and if the area issignificant, the resultant force per unit area is termed as pressure or stress
and is described as force per unit area N/m2.
1.6.2 Types of force systemWhen several forces are acting upon a body simultaneously, they
constitute a system of forces. Force system is classified based upon the twodimensional or three dimensional space of forces and the orientation of lineof action of forces. The classification is given below.
I. Coplanar force system
(a) Concurrent (b) Parallel
(c) Non-concurrent (d) Collinear
II. Non coplanar force system(a) Concurrent (b) Parallel
(c) Non-concurrent
W /mSim p ly supported
bea m
YXa
b
Fig 1.12 D istributed force
Force system
Coplanar
Non-coplanar
Concurren tParalle lNon-concurren t, N on-para lle lCo llinear
Concurren tParalle lNon-concurren t, N on-para lle l
Force System-Centroid and Moment of Inertia 1.13
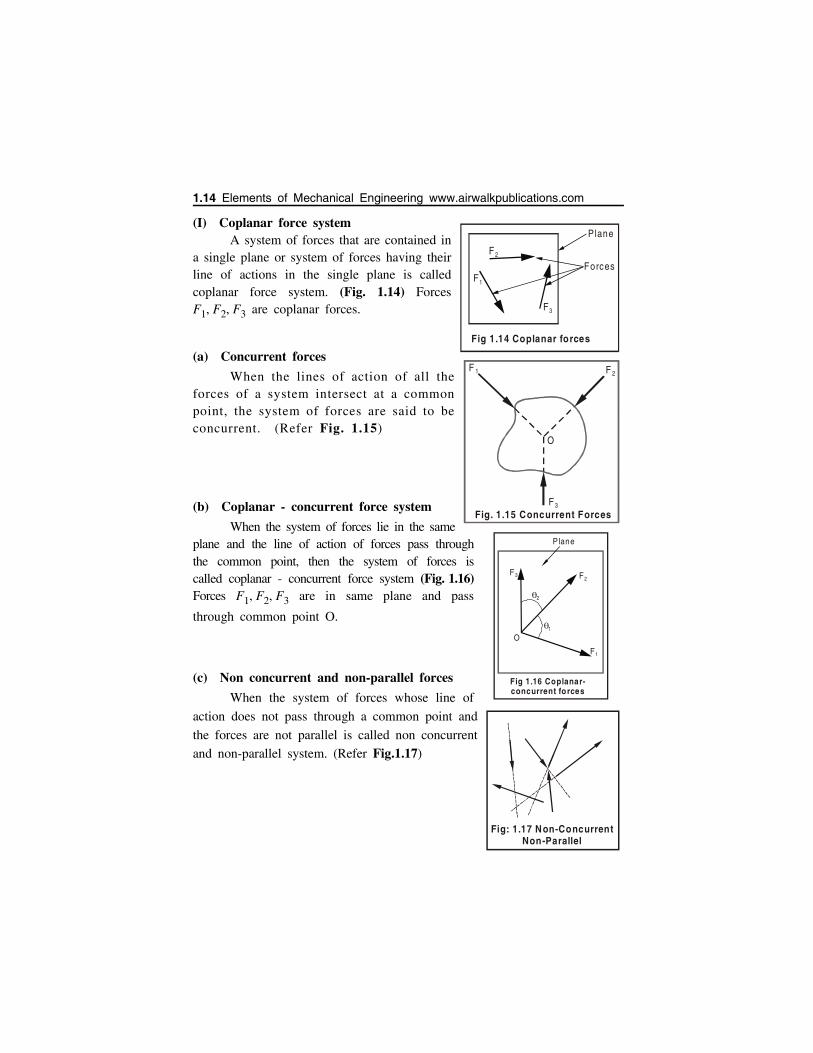
(I) Coplanar force systemA system of forces that are contained in
a single plane or system of forces having theirline of actions in the single plane is calledcoplanar force system. (Fig. 1.14) ForcesF1, F2, F3 are coplanar forces.
(a) Concurrent forces
When the lines of action of all theforces of a system intersect at a commonpoint, the system of forces are said to beconcurrent. (Refer Fig. 1.15)
(b) Coplanar - concurrent force system
When the system of forces lie in the sameplane and the line of action of forces pass throughthe common point, then the system of forces iscalled coplanar - concurrent force system (Fig. 1.16)Forces F1, F2, F3 are in same plane and pass
through common point O.
(c) Non concurrent and non-parallel forces
When the system of forces whose line of
action does not pass through a common point and
the forces are not parallel is called non concurrent
and non-parallel system. (Refer Fig.1.17)
Fig 1.14 Coplanar forces
F1
F 2
F3
Forces
Plane
O1
2
F 3 F2
F1
Fig 1.16 Coplanar- concurrent fo rces
Plane
O
F 1 F 2
F3
Fig. 1.15 Concurrent Forces
Fig: 1.17 Non-ConcurrentNon-Parallel
1.14 Elements of Mechanical Engineering www.airwalkpublications.com
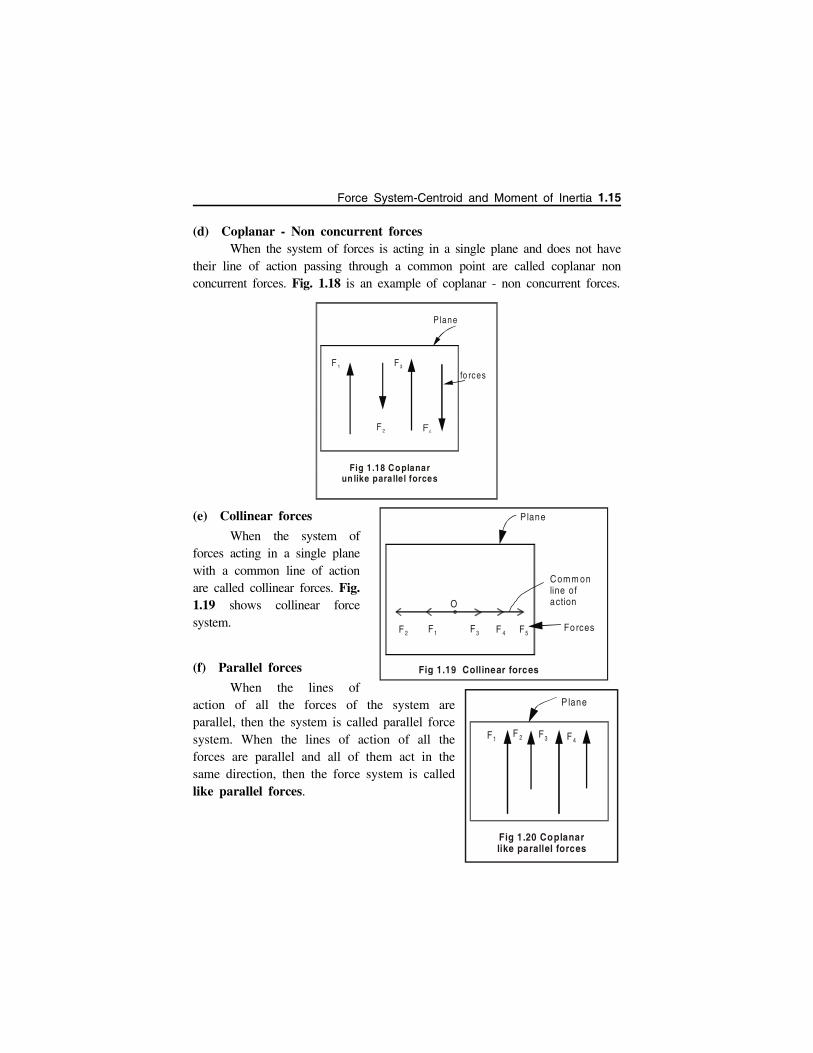
(d) Coplanar - Non concurrent forcesWhen the system of forces is acting in a single plane and does not have
their line of action passing through a common point are called coplanar nonconcurrent forces. Fig. 1.18 is an example of coplanar - non concurrent forces.
(e) Collinear forces
When the system offorces acting in a single planewith a common line of actionare called collinear forces. Fig.1.19 shows collinear forcesystem.
(f) Parallel forces
When the lines ofaction of all the forces of the system areparallel, then the system is called parallel forcesystem. When the lines of action of all theforces are parallel and all of them act in thesame direction, then the force system is calledlike parallel forces.
O
F 2 F1 F3 F 4 F5
Comm online ofaction
Forces
Fig 1.19 Collinear forces
Plane
F 1F 2 F3 F 4
P lane
Fig 1.20 Coplanarlike parallel forces
F 1
F 2
F 3
P lane
fo rces
Fig 1.18 Coplanar un like parallel forces
Force System-Centroid and Moment of Inertia 1.15

When the line of action of all the
forces are parallel and some forces act
in one direction while others in opposite
direction, then the force system is called
unlike parallel force system. Fig. 1.20shows an example of coplanar like
parallel force system and Fig. 1.21shows an example of coplanar unlike
parallel force system.
II Non coplanar force system
A system of forces in which the
forces lie in different planes or in a three dimensional space is called a Non
coplanar force system.
(a) Non coplanar concurrent forces
A system of forces lying in different planes with their line of action
intersecting at a common point are called Non coplanar concurrent force
system. Fig. 1.22 shows such an example.
F 1
F2
F3
P lane
forces
Fig 1.21 Coplanar unlike parallel forces
X
Y
Z
O
F1
F2
Planes
Fig 1.23 Non Coplanar non concurrent forces
F3
X
Y
Z
O
F 1
O ’
F2
Fig 1.22 Non Coplaner Concurrent forces
Plan es
1.16 Elements of Mechanical Engineering www.airwalkpublications.com

(b) Non coplanar Non concurrent forces
A system of forces lying in different planes with different lines of
actions are called non coplanar non concurrent forces (Fig. 1.23)
(c) Non coplanar parallel forces
A system of forces lying in different plane but their line of action
parallel to each other are called non coplanar parallel forces. In Fig. 1.24forces F1 and F2 are non coplanar like parallel force and F3 and F4 are non
coplanar unlike parallel forces.
(d) Non coplanar Non concurrent and Non parallel forces (skew forces)
A system of forces that are not
lying in same plane with different line
of action and not passing through same
common point and are not parallel to
each other are called Non coplanar Non
concurrent and non parallel forces.
These forces are also called as skewforces.
X
Y
Z
O
F1 F 2
F3
F 4
Fig 1.24 Non Coplanar parallel forces
X
Y
Z
O
F 1
F 2
F3
Fig 1.25 Skew forces
F3F2
F1
R (Resultan t )
Fig 1.26 Resultant forceParticle
Force System-Centroid and Moment of Inertia 1.17
1.7 COMPOSITION OF FORCESComposition of a force system is a process of finding a single force,
known as resultant, that can produce the same effect on the particle as that
of the system of forces. For example Fig. 1.26 shows a system of three forces
acting on a particle with the resultant R which can produce the same effect.
A particle means that the size and shape of body does not significantly
affect the solution of problems and all the forces are assumed to act at the
same point.
Thus, the resultant is a representative force which has the sameeffect on the particle as the group of forces it replaces.
1.7.1 Resultant of two coplanar concurrent forces
Resultant of two coplanar concurrent forces can be obtained by the
following methods.
1. Analytical method
(a) Parallelogram law of forces
(b) Triangular law of forces
2. Graphical method
(a) Parallelogram law of forces, (b) Triangular law of forces
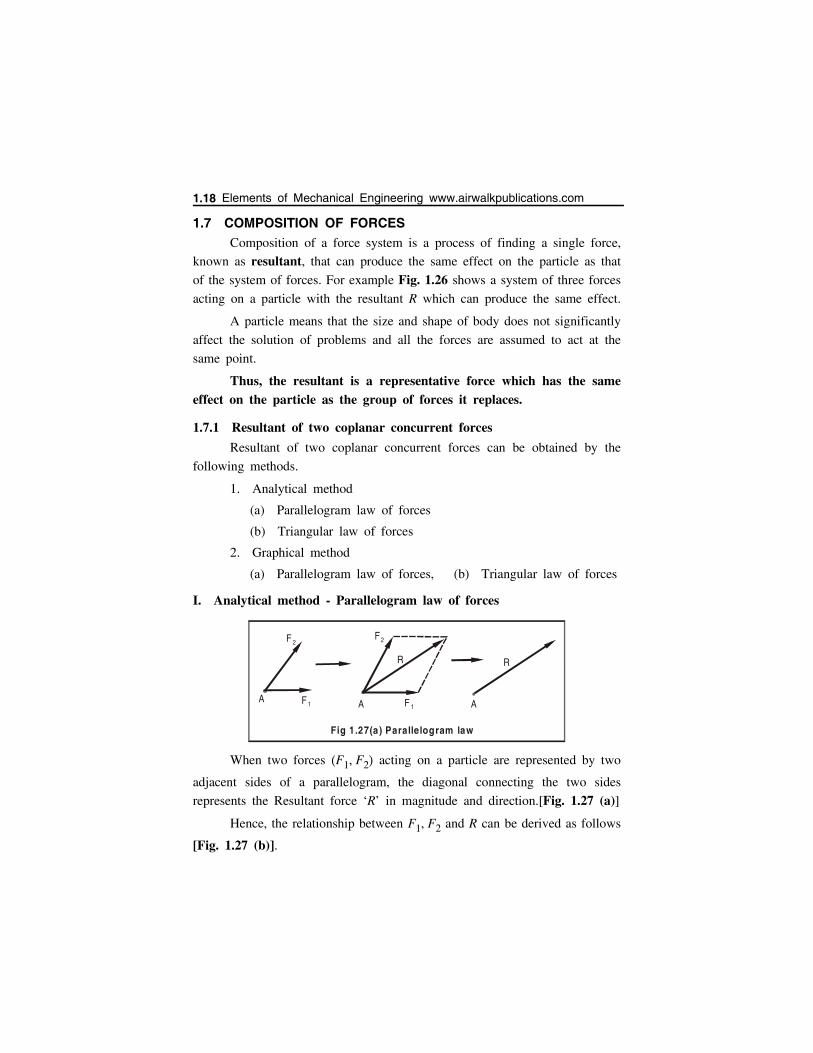
I. Analytical method - Parallelogram law of forces
When two forces F1, F2 acting on a particle are represented by two
adjacent sides of a parallelogram, the diagonal connecting the two sides
represents the Resultant force ‘R’ in magnitude and direction.[Fig. 1.27 (a)]
Hence, the relationship between F1, F2 and R can be derived as follows
[Fig. 1.27 (b)].
F 2
A F1
R
F2
F 1
R
Fig 1.27(a) Parallelogram law
AA
1.18 Elements of Mechanical Engineering www.airwalkpublications.com

Consider the parallelogram OACB.
Let OA and OB represent the forces F
1 and
F
2 acting at a point O. The diagonal OC
represents the resultant R
which can beexpressed as,
OC2 OA AD2 CD2
OA2 2 OA AD AD2 CD2
OA2 2 OA AD AC2 [. . . AC2 AD2 CD2]
R2 F12 2 F1 F2 cos F2
2 [. . . AC OB F2]
[... AD AC cos F2 cos ]
Hence R F12 F2
2 2F1 F2 cos
Also tan CD
OA AD
F2 sin F1 F2 cos
Consider the following special cases.
Note (1): If F1, F2 are at right angles, then 90, cos 90 0
, R F12 F2
2
tan F2F1
Note (2): If F1, F2 are collinear and are in the same direction, then
0, cos 1
R2 F12 F2
2 2F1 F2
Resultant R F1 F2, tan 0 or 0
Case (3): If F1 F2 are collinear and are in opposite directions F1 F2,
then 180
O F1 A D
R
B C
F2
Fig. 1.27(b) Resultant of two forces
Force System-Centroid and Moment of Inertia 1.19
R2 F12 F2
2 2F1 F2, R F1 F2
tan 0: 0
Problem 1.1: The maximum and minimum resultant of two forces acting ona particle are 50 kN and 10 kN respectively. If 50 kN is the magnitude ofthe resultant for the given system of forces F1 and F2, find the angle between
F1 & F2.
Solution:
We know that Resultant of two coplanar concurrent forces is
R2 F12 F2
2 2F1 R2 cos
When R is maximum 0 i.e., 50 F1 F2
When R is minimum, 180 i.e., 10 F1 F2
Solving the above two equations, we get F1 30 kN and F2 20 kN
If the resultant of forces F1, F2 acting at an angle ‘’ is 50 kN,
502 302 202 2 30 20 cos
cos 1 or 0
Thus F1 and F2 are collinear to each other when the resultant is 50kN.
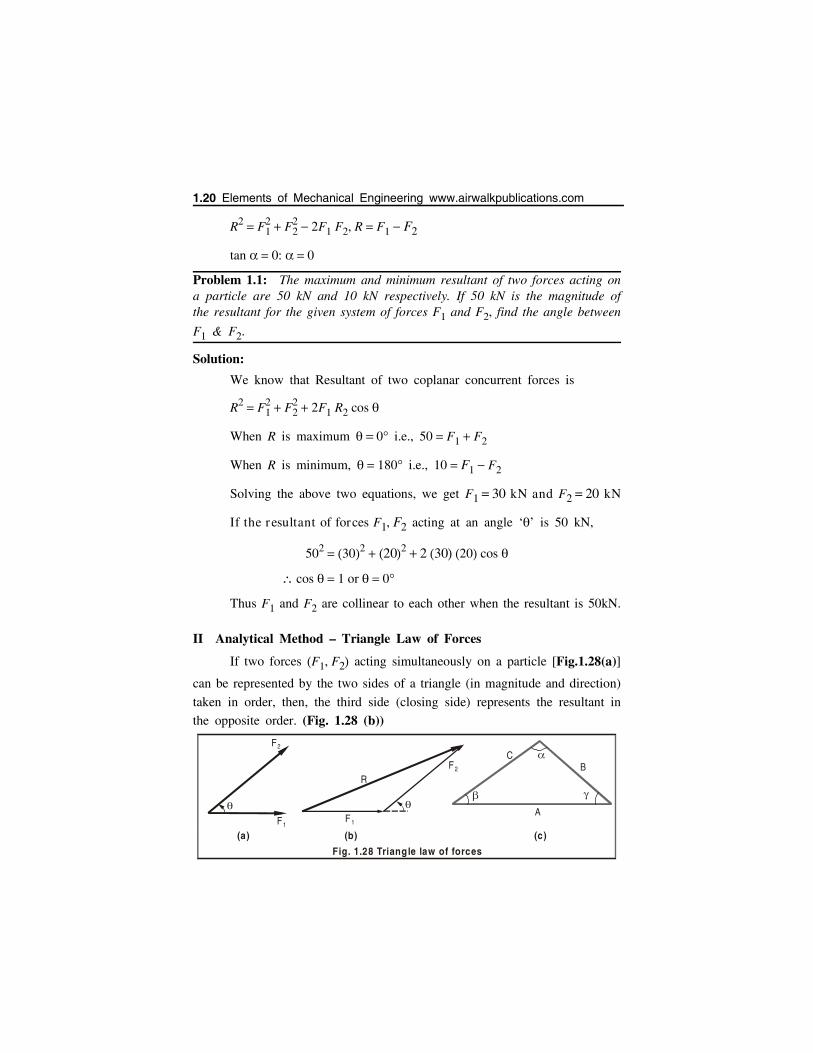
II Analytical Method – Triangle Law of Forces
If two forces F1, F2 acting simultaneously on a particle [Fig.1.28(a)]
can be represented by the two sides of a triangle (in magnitude and direction)
taken in order, then, the third side (closing side) represents the resultant in
the opposite order. (Fig. 1.28 (b))
F1
F2
F1
RF2
Fig. 1.28 Triangle law of forces
A
BC
(a) (b) (c)
1.20 Elements of Mechanical Engineering www.airwalkpublications.com

Thus trigonometric relations can be applied. From Fig. 1.28(c), we have
Asin
B
sin
Csin
III Graphical method - Parallelogram law of forcesConsider two forces F1 & F2 acting at a point O as shown in
Fig.1.29(a). Draw two sides of parallelogram representing the forces F1 &
F2 to some scale. Fig. 1.29 (b) as OA and OB. Complete the parallelogram
by drawing AC, BC equal to OB and OA to the same scale. Draw the diagonalOC representing the resultant of the two force system.
The length of diagonal measured to the chosen scale represents the
magnitude of the resultant acting at an angle from the x axis.
IV Graphical method - Triangle law of forces
F2
F1
O
(a)
O
B C
A
F 2
F1
R
(b )
x ax is
Fig 1.29 Graphical method- parallelogram law of forces
B
A
Resu ltant(R )
O
F2
F1
x axis(a)O
F2
F 1(b)
Force System-Centroid and Moment of Inertia 1.21

Consider two forces F1 and F2 as shown in Fig. 1.30 (a). Draw OA
to some scale as shown in the Fig. 1.30 (b). From the end A, draw AB to
same scale. Join OB as the closing side of triangle. The length OB to the
same scale represents the magnitude of the resultant of the two forces F1 &
F2. The angle represents the angle of resultant taken from x axis.
Problem 1.2: If two forces F1 20 kN and F2 15kN act on a particle as
shown in Fig., find their resultant by (1) Parallelogram law and (2) Trianglelaw. (FAQ)
Given
F1 20 kN, F2 15 kN
70
Using parallelogram law
R F12 F2
2 2 F1 F2 cos
R 202 152 2 20 15 cos 70
R 28.813
Using Triangle law
[Take scale 1 cm = 1 kN]
Draw horizontal OA of length 20cm . From A, draw a line AB of length
15 at an angle of 70.
Now join OB. The length ofOB measures 28.813 cm. This is theresultant.
ie R 28.813 kN
70o
15kN
20kN
R esultant
F ig (b)O A
B
1.22 Elements of Mechanical Engineering www.airwalkpublications.com
70o
15kN
20kNO Fig (a)

1.7.2 Resolution of ForcesThe process of replacing a single force F acting on a particle by two or
more forces which together have the same effect of a single force is called resolution
of force into components. Theoretically a force can be resolved into an infinite
number of component sets, however in practice a force is resolved into two
components.
Consider a force F acting at an
angle from x axis as shown in Fig. 1.31.
The two rectangular components
of forces are resolved along x and y axis
and are given as
Fx F cos ; Fy F sin
In the vector form
Force F
Fx i Fy j
Considering resolution of force
on an inclined plane as shown in
Fig. 1.32. The force F is resolved into
two components Fn and Ft
Normal component, Fn F cos
Tangential component,
Ft F sin
Writing in vector form
F
Ft
Fn
In simple words,
Fig 1.31Resolution o f fo rces
Y
X
Fy
F x
F
O
F
x
Fig 1 .32 Resolution of forces on inclined plane
F t
F n
Force System-Centroid and Moment of Inertia 1.23

Resolution (projection) of Forces into components
A single force can be resolvedinto two components which give thesame effect on the particle. ReferFig.1.33.
Now a force F is resolved as -Horizontal component of ‘F’ i.e.
“F cos ” and Vertical component of
‘F’ i.e. “F sin ”.
1.7.3 Resultant of Coplanar ForceSystem - (Method of projections)
Consider a particle shown in Fig. 1.34 (a) subjected to four forcesF1, F2, F3, F4. The resolution of each force is shown in Fig. 1.34 (b).
The Resultant
R
F1x F2x F3x F4x i F1y F2y F3y F4y j
H orizon ta lcom ponen t o f F
F s
in
=
F cos=
F
Fig.1.33
Fig 1.34 Several C oncurrent forces
X
Y
F1
F2
F3
F 4
Particle(a)
o
2 1
3
4
(b)
X
Y
F1
F2
F3F 4
o
F2 y
F 2 x
F1 y
F1 x
F4 x
F 4 y
F 3 y
F3 x
1.24 Elements of Mechanical Engineering www.airwalkpublications.com

R
Rx i Ry j
Fx i
Fy j
The Resultant of the above forces is shownin Fig. 1.34 (c).
The Angle made by Resultant R is given by
tan Ry
Rx Fy
Fx
The magnitude of the Resultant
F Fx2 Fy
2
For n number of forces acting on the particle, then the Resultant isgiven as
R
F
F1x F2x Fnx i F1y F2y Fny j
R
Rx i Ry j
Fx i
Fy j
and tan Fy
Fx
Note:If angle of the various forces
are taken from positive x axis, then the(Fig. 1.35)
Resultant Rx Fx i 1
n
Fi cos i
Ry Fy i 1
n
Fi sin i
R Rx i Ry j
Magnitude R Rx2 Ry
2
Angle of inclination of Resultant tan 1 RyRx
R y
R
X
R xO
Y
Fig 1.34 (c) Resultant
X
YF 1F 2
F 4
F3Fig 1 .35 Force system
1
2
3
4
Force System-Centroid and Moment of Inertia 1.25

1.7.4 Summary
Resultant Force
Two or more forces on a particle may
be replaced by a single force called resultant
force which gives a same effect.
The resultant force, of a given system of
forces, is found out by the method of resolution
as followed:
1. Resolve all the forces vertically and add
all the vertical components (i.e., Find
Fy)
2. Resolve all the forces horizontally and add all the horizontal components
(i.e., Find Fx)
3. The resultant R of the given forces is given by the equation:
R Fy2 Fx
2
4. The resultant force will be inclined at an angle , with the horizontal.
tan
Fy
Fx
Note: The value of the angle will
vary depending upon the values of
Fy and Fx as discussed below: (Refer
Fig. 1.37)
(a) When Fy is ve, resultant will
be in 1st Quadrant or 2nd
Quadrant. (i.e. in between
0 to 180).
(b) When Fy is ve, resultant will
be in IIIrd Quadrant or IVth Quadrant. (i.e. in between 180 to 360).
P
Q
R = P +
Q2
2
Fig.1.36
I Quadrant
II Q uadrant
III Q uadran t
IV Quadrant
0 ,360o o
270 o
180o
90o
(-) x ax is
(-)
y ax
is(+
) y
axis
(+ ) x axis
Fig.1.37.
1.26 Elements of Mechanical Engineering www.airwalkpublications.com

(c) When Fx is ve, the resultant will be in Ist Quadrant or IVth Quadrant
(i.e. in between 0 to 90 or 270 to 360).
(d) When Fx is ve, the resultant will be in IInd Quadrant or IIIrd
Quadrant. (i.e. in between 90 to 180 or 180 to 270).
The following sign conventions are followed for solving staticsproblems.
Sign conventions for the direction of force:
‘x’ axis Right side ‘’ ve.
‘x’ axis Left side ‘’ ve
‘y’ axis Upside ‘’ ve
‘y’ axis Downward ‘’ ve
SOLVED PROBLEMSProblem 1.3: Four forces act on a bolt A as shown in Fig (a). Determinethe resultant of the forces on the bolt.
Given diagram
F cos 1
Fsi
n1
F 1
F =150N1
F =110N3
F =100N4
F =80N2
o x
y
Fig.(a)
30o70o
15o
Fig.(b)
=30 o
Force System-Centroid and Moment of Inertia 1.27
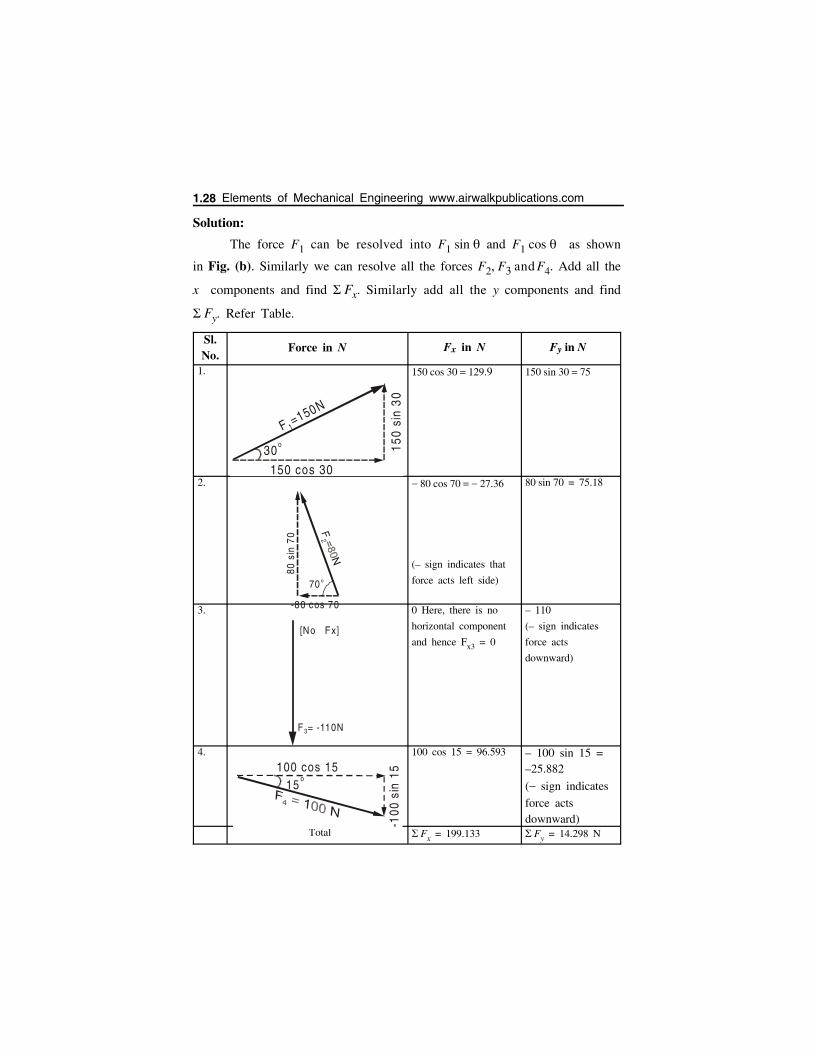
Solution:
The force F1 can be resolved into F1 sin and F1 cos as shown
in Fig. (b). Similarly we can resolve all the forces F2, F3 and F4. Add all the
x components and find Fx. Similarly add all the y components and find
Fy. Refer Table.
Sl.No.
Force in N Fx in N Fy in N
1. 150 cos 30 129.9 150 sin 30 75
2. 80 cos 70 27.36
(– sign indicates that
force acts left side)
80 sin 70 = 75.18
3. 0 Here, there is no
horizontal component
and hence Fx3 = 0
– 110
(– sign indicates
force acts
downward)
4. 100 cos 15 = 96.593 – 100 sin 15 =–25.882
( sign indicates
force actsdownward)
Total Fx = 199.133 Fy = 14.298 N
30o
F =150N1
150 cos 30
150
sin
30
70 o
-80 cos 70
80 s
in 7
0
[No Fx]
F = -110N3
15o
-100
sin
15100 cos 15
1.28 Elements of Mechanical Engineering www.airwalkpublications.com
Fx 150 cos 30 80 cos 70 0 100 cos 15 199.1
Fy 150 sin 30 80 sin 70 0 100 sin 15 14.3
The resultant R Fx2 Fy
2 199.12 14.32
199.6 N
R 199.6 NResolution of forces in x
components and y components are given
in detail in the next page.
tan Fy
Fx
14.3199.1
0.07164
4.1
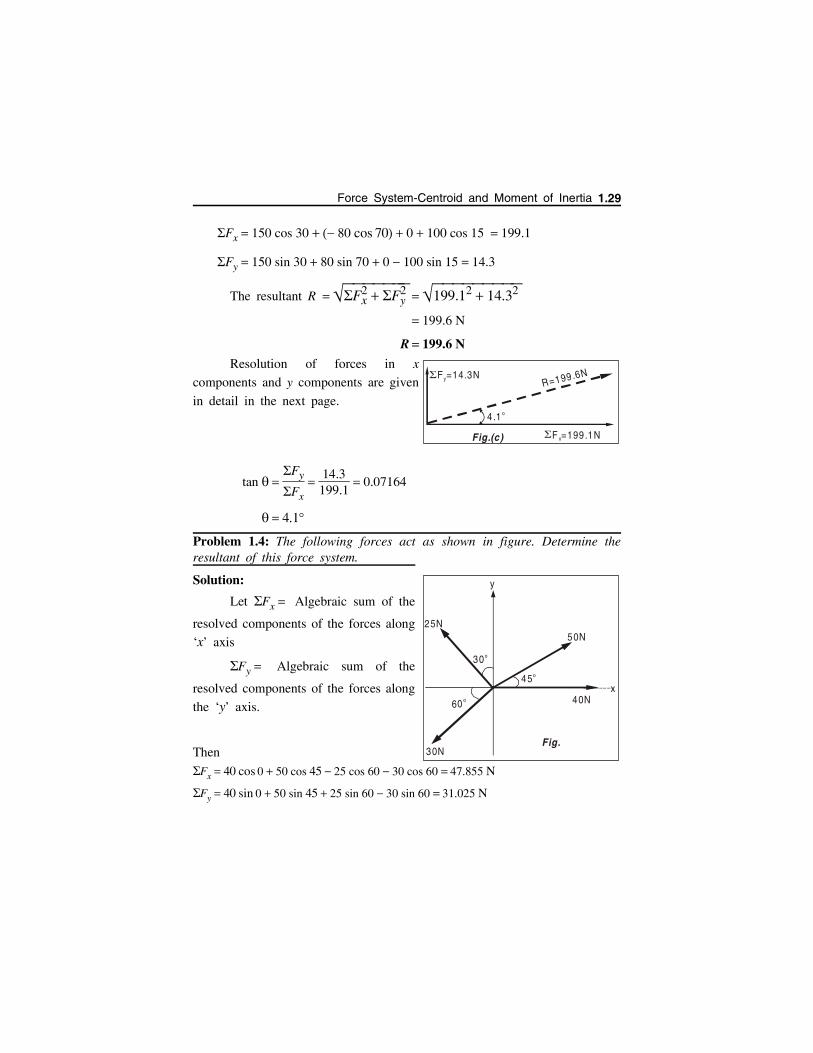
Problem 1.4: The following forces act as shown in figure. Determine theresultant of this force system.
Solution:
Let Fx Algebraic sum of the
resolved components of the forces along
‘x’ axis
Fy Algebraic sum of the
resolved components of the forces along
the ‘y’ axis.
Then
Fx 40 cos 0 50 cos 45 25 cos 60 30 cos 60 47.855 N
Fy 40 sin 0 50 sin 45 25 sin 60 30 sin 60 31.025 N
45o
30o
60 o
30N
25N50N
40Nx
y
Fig.
R=199.6NF =14.3Ny
F =199.1NxFig.(c)
4.1 o
Force System-Centroid and Moment of Inertia 1.29
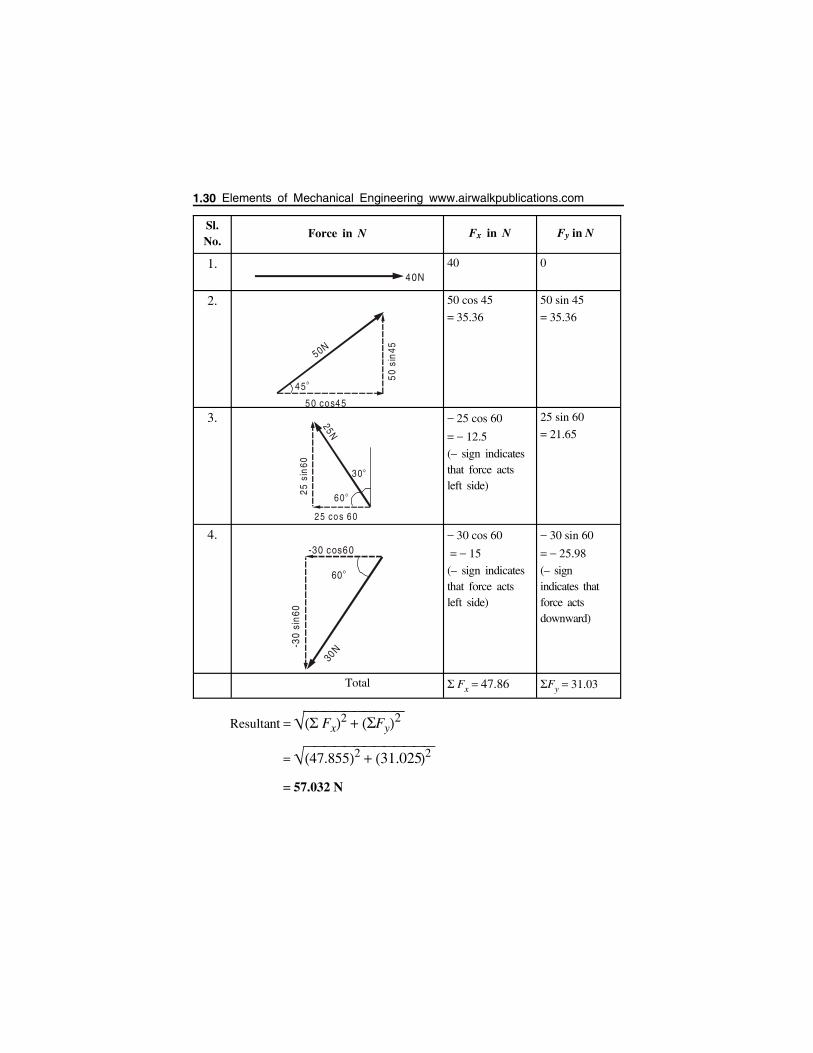
Sl.No.
Force in N Fx in N Fy in N
1. 40 0
2. 50 cos 45
35.36
50 sin 45
35.36
3. 25 cos 60
12.5
(– sign indicatesthat force actsleft side)
25 sin 60
21.65
4. 30 cos 60
15
(– sign indicatesthat force actsleft side)
30 sin 60
25.98
(– signindicates thatforce actsdownward)
Total Fx 47.86 Fy 31.03
Resultant Fx2 Fy
2
47.8552 31.0252
57.032 N
40N
50N
45o
50
sin
455 0 cos45
25 s
in60
2 5 cos 60
25N
60 o
30o
-30
sin6
0
-30 cos60
30N
60o
1.30 Elements of Mechanical Engineering www.airwalkpublications.com
Since Fx and Fy are both
positive, the resultant will be in the first
quadrant as shown in Fig.
tan Fy
Fx
31.02547.855
0.6483
32.95
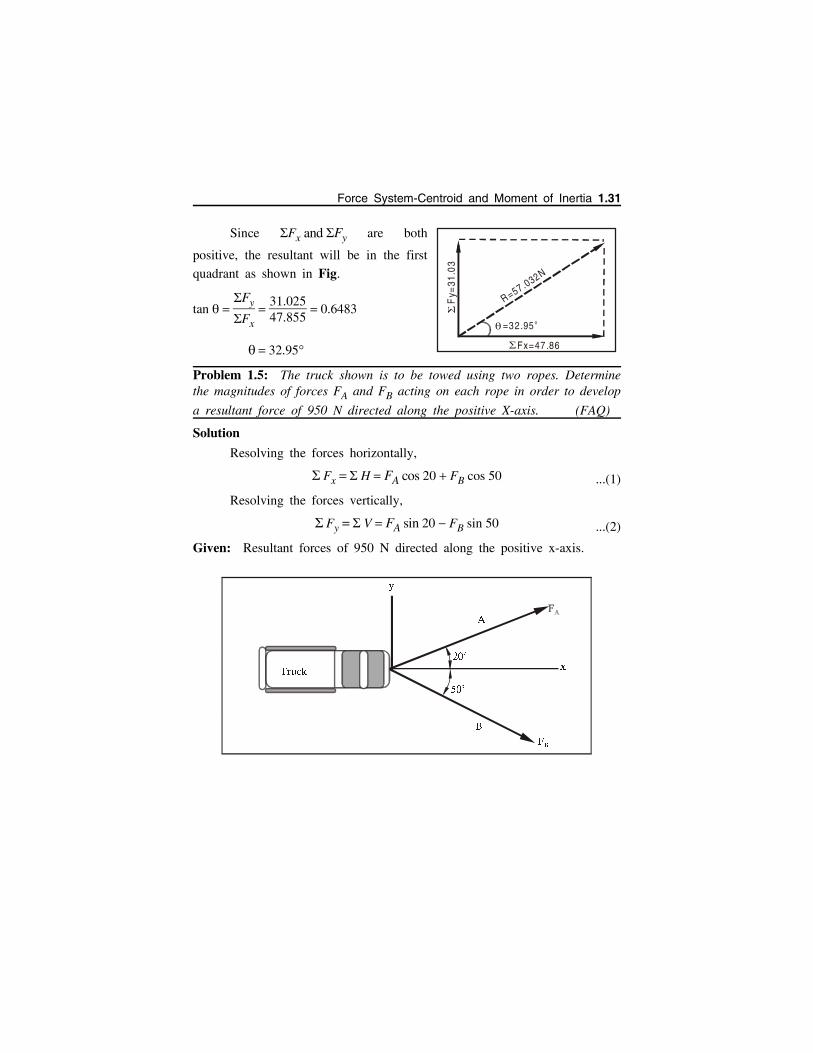
Problem 1.5: The truck shown is to be towed using two ropes. Determinethe magnitudes of forces FA and FB acting on each rope in order to develop
a resultant force of 950 N directed along the positive X-axis. (FAQ)
Solution
Resolving the forces horizontally,
Fx H FA cos 20 FB cos 50 ...(1)
Resolving the forces vertically,
Fy V FA sin 20 FB sin 50 ...(2)
Given: Resultant forces of 950 N directed along the positive x-axis.
R=57 .032N
=32.95 o
Fx=47 .86
Fy=
31.0
3
��
�
�
���
���
�
�
��
Force System-Centroid and Moment of Inertia 1.31

So H 950 N and V 0 apply on equation (1) & (2)
(1) 950 FA cos 20 FB cos 50 ...(3)
(2) 0 FA sin 20 FB sin 50
FA sin 20 FB sin 50
FA FB sin 50
sin 20
FA 2.2397 FB ...(4)
Subtitute equation (4), in equation (3)
(3) 950 [2.2397 FB cos 20] FB cos 50
950 2.104 FB 0.642 FB
950 2.746 FB
FB 345.86 N
(4) FA 2.2397 345.86
FA 774.62 N
Result
FA 774.62 N, FB 345.86 N
Problem 1.6: Determine the resultant of the concurrent force system shownin Figure (a).
Fx H
150 cos 30 200 cos 30 80 cos 60 180 cos 45
43.98 N
Fy V
150 sin 30 200 sin 30 80 sin 60 180 sin 45
21.56 N
1.32 Elements of Mechanical Engineering www.airwalkpublications.com
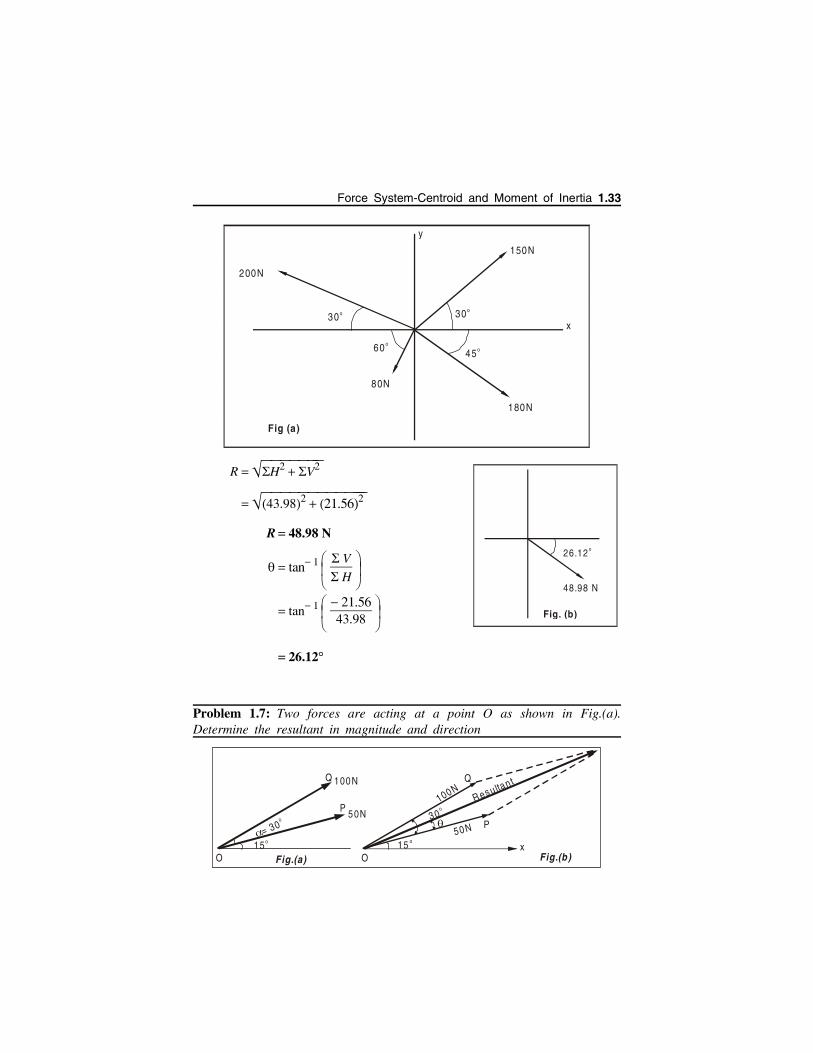
R H2 V2
43.982 21.562
R 48.98 N
tan 1 V
H
tan 1 21.5643.98
26.12
Problem 1.7: Two forces are acting at a point O as shown in Fig.(a).Determine the resultant in magnitude and direction
180N
80N
150N
200N
30o
60o
30o
45o
Fig (a)
y
x
26.12 o
48.98 N
Fig. (b)
100N
50N
Q
P
= 30o
15o
O
100N
50N
Q
P3 0
o
15 o
O
Resultant
Fig.(b)Fig.(a)
x
Force System-Centroid and Moment of Inertia 1.33

Solution:
Force P 50 N, Force Q 100 N
Angle between the two forces, 30
The magnitude of the resultant R is given by formula.
R P2 Q2 2 PQ cos
502 1002 2 50 100 cos 30
2500 10000 8660
21160 145.46 N
The resultant R is shown in Fig.(b).
The angle made by the resultant with the direction of P is given by
equation.
tan Q sin
P Q cos or
tan 1
Q sin P Q cos
tan 1
100 sin 3050 100 cos 30
tan 1 0.366 20.10
Angle made by resultant with x-axis.
15 20.10 15
35.10
1.34 Elements of Mechanical Engineering www.airwalkpublications.com
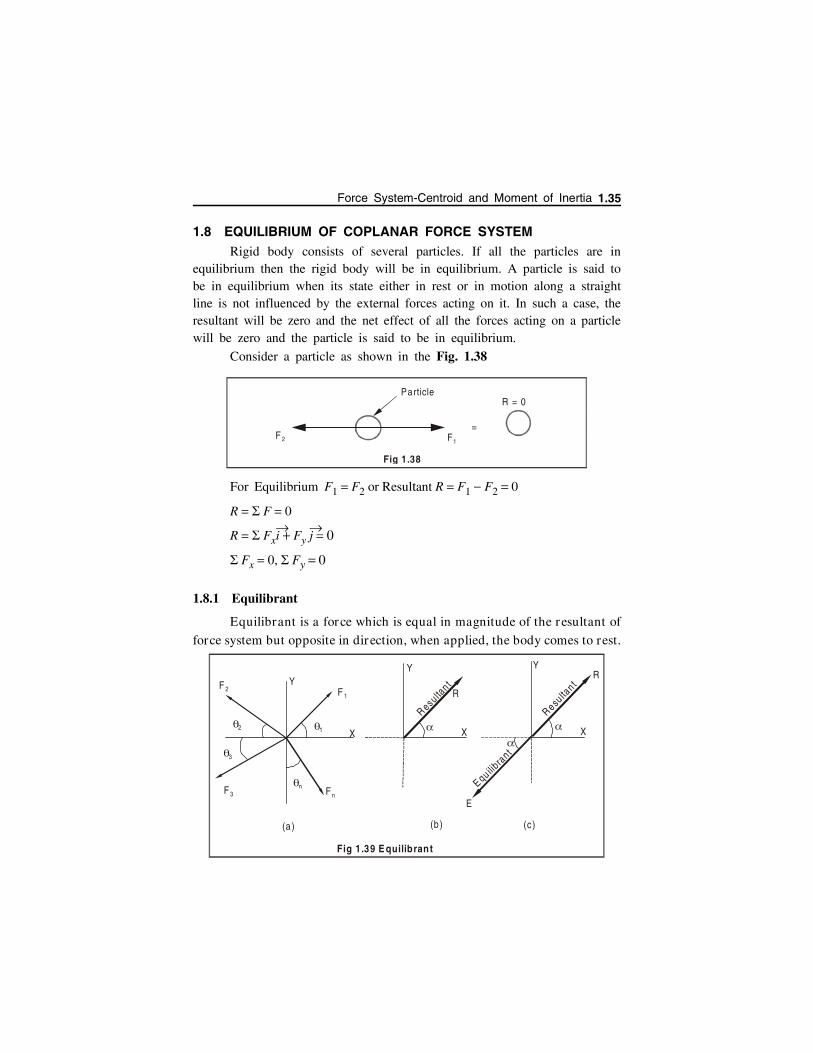
1.8 EQUILIBRIUM OF COPLANAR FORCE SYSTEMRigid body consists of several particles. If all the particles are in
equilibrium then the rigid body will be in equilibrium. A particle is said tobe in equilibrium when its state either in rest or in motion along a straightline is not influenced by the external forces acting on it. In such a case, theresultant will be zero and the net effect of all the forces acting on a particlewill be zero and the particle is said to be in equilibrium.
Consider a particle as shown in the Fig. 1.38
For Equilibrium F1 F2 or Resultant R F1 F2 0
R F 0
R Fxi Fy j
0
Fx 0, Fy 0
1.8.1 Equilibrant
Equilibrant is a force which is equal in magnitude of the resultant of
force system but opposite in direction, when applied, the body comes to rest.
Particle
F 2 F1
Fig 1.38
=
R = 0
X
YF 1
F 2
F3 Fn
2 1
3
n
(a ) (b )
Fig 1.39 E quilibrant
E
RY
X
(c)
Y
X
Resultan t
R
Resulta
nt
Equ ilibra
nt
Force System-Centroid and Moment of Inertia 1.35
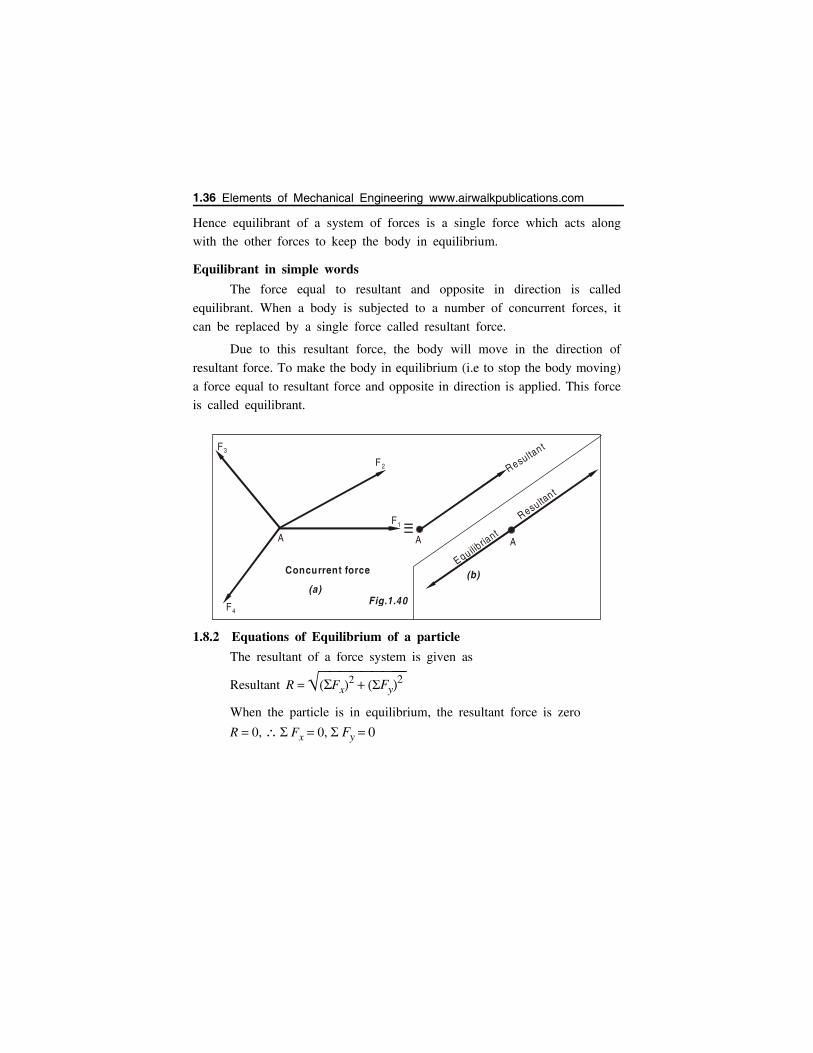
Hence equilibrant of a system of forces is a single force which acts along
with the other forces to keep the body in equilibrium.
Equilibrant in simple words
The force equal to resultant and opposite in direction is called
equilibrant. When a body is subjected to a number of concurrent forces, it
can be replaced by a single force called resultant force.
Due to this resultant force, the body will move in the direction of
resultant force. To make the body in equilibrium (i.e to stop the body moving)
a force equal to resultant force and opposite in direction is applied. This force
is called equilibrant.
1.8.2 Equations of Equilibrium of a particle
The resultant of a force system is given as
Resultant R Fx2 Fy
2
When the particle is in equilibrium, the resultant force is zero
R 0, Fx 0, Fy 0
A
F1
F 2
F3
F4
A A
Equilibria
nt
Resulta
n t
Resultan t
Concurrent force
Fig.1.40(a)
(b)
1.36 Elements of Mechanical Engineering www.airwalkpublications.com
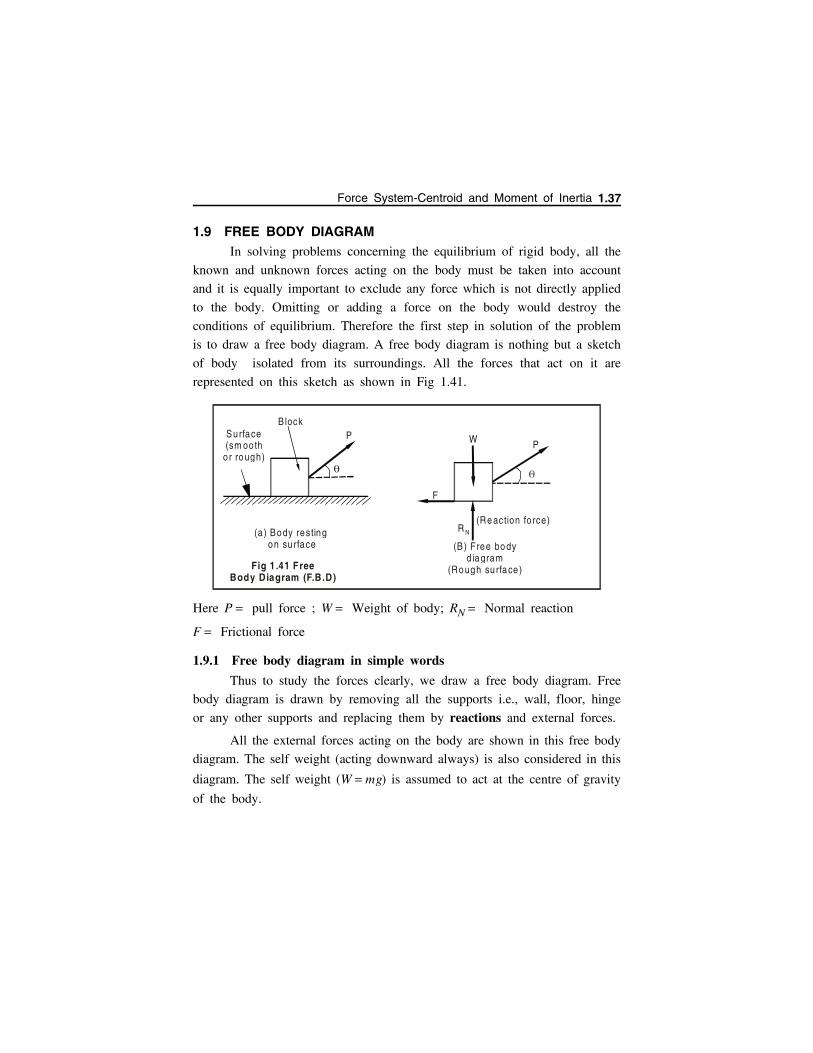
1.9 FREE BODY DIAGRAMIn solving problems concerning the equilibrium of rigid body, all the
known and unknown forces acting on the body must be taken into account
and it is equally important to exclude any force which is not directly applied
to the body. Omitting or adding a force on the body would destroy the
conditions of equilibrium. Therefore the first step in solution of the problem
is to draw a free body diagram. A free body diagram is nothing but a sketch
of body isolated from its surroundings. All the forces that act on it are
represented on this sketch as shown in Fig 1.41.
Here P pull force ; W Weight of body; RN Normal reaction
F Frictional force
1.9.1 Free body diagram in simple words
Thus to study the forces clearly, we draw a free body diagram. Free
body diagram is drawn by removing all the supports i.e., wall, floor, hinge
or any other supports and replacing them by reactions and external forces.
All the external forces acting on the body are shown in this free body
diagram. The self weight (acting downward always) is also considered in this
diagram. The self weight (W mg) is assumed to act at the centre of gravity
of the body.
BlockPSurface
(sm oo th o r rough)
(a ) Body resting on su rface
Fig 1 .41 Free Body Diagram (F.B.D)
F
(B) Free bo dy d iagram
(Ro ugh su rfa ce )
R N
PW
(Re action fo rce)
Force System-Centroid and Moment of Inertia 1.37
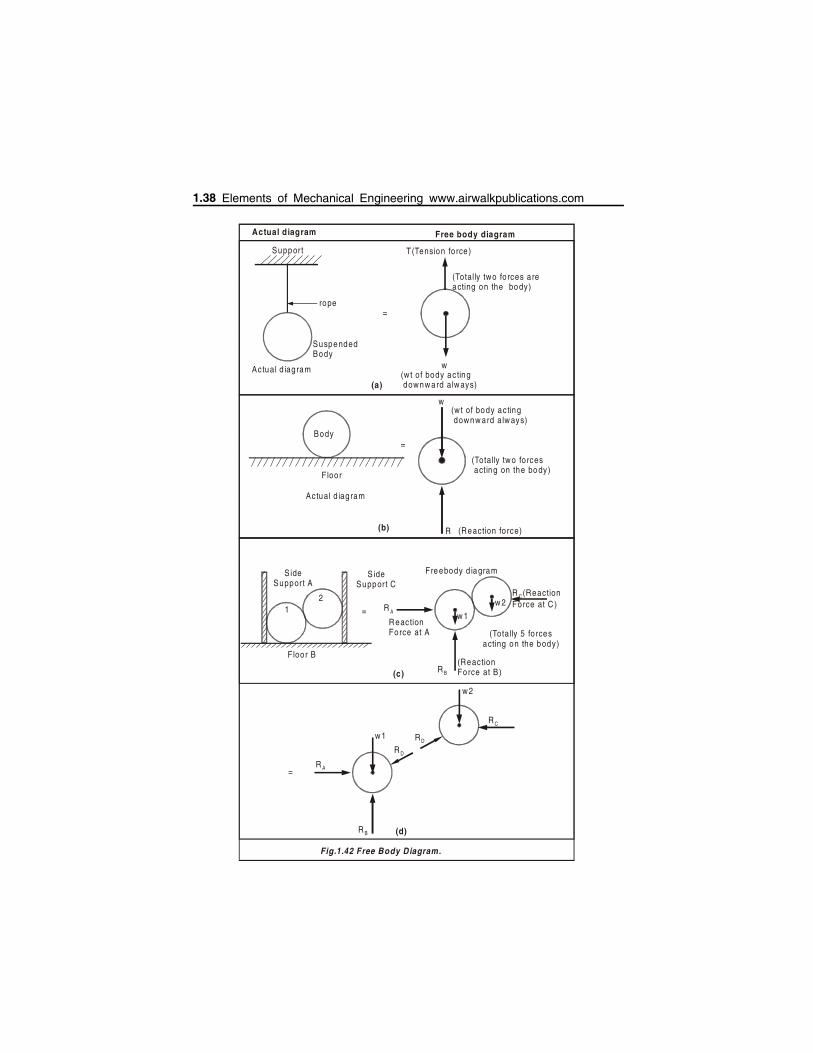
rope
Suspe nded Body
Actual d iagram
Suppor t
Actual d iagram
Body
Floor
R (Reaction fo rce)
(Totally two fo rces acting on the bo dy)
(w t of body ac ting downw ard alw ays)
(w t of body ac ting downw ard alw ays)
T(Tension fo rce)
(Totally two fo rces a reacting on the bo dy)
w
w
SideSuppor t A
SideSuppor t C
12
Floor B
R A
R B
R eactionForce at A
(ReactionForce at B)
Fre ebody d iagram
w 1
w 2
(Totally 5 fo rces acting on the body)
Actual diagram Free body diagram
R (ReactionForce at C )
C
Fig.1.42 Free Body Diagram.
R A
R B
w 1
w 2
R C
R D
R D
=
=
=
=
(a)
(b)
(c)
(d)
1.38 Elements of Mechanical Engineering www.airwalkpublications.com
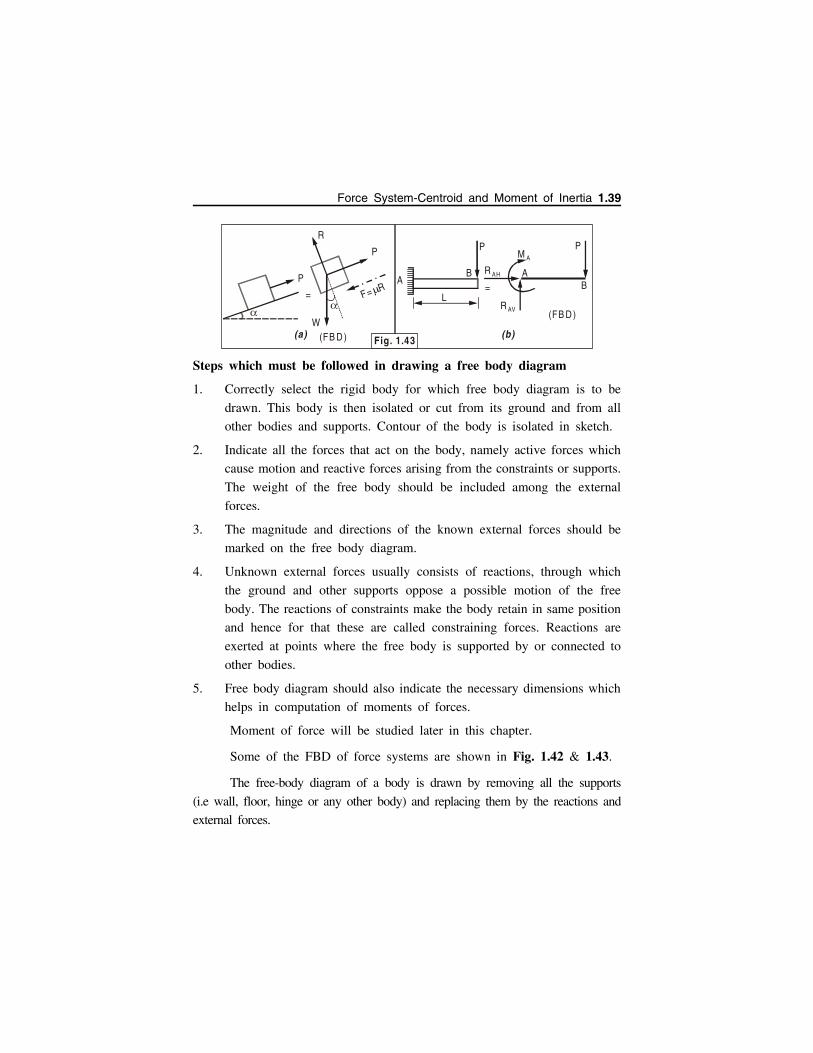
Steps which must be followed in drawing a free body diagram
1. Correctly select the rigid body for which free body diagram is to be
drawn. This body is then isolated or cut from its ground and from all
other bodies and supports. Contour of the body is isolated in sketch.
2. Indicate all the forces that act on the body, namely active forces which
cause motion and reactive forces arising from the constraints or supports.
The weight of the free body should be included among the external
forces.
3. The magnitude and directions of the known external forces should be
marked on the free body diagram.
4. Unknown external forces usually consists of reactions, through which
the ground and other supports oppose a possible motion of the free
body. The reactions of constraints make the body retain in same position
and hence for that these are called constraining forces. Reactions are
exerted at points where the free body is supported by or connected to
other bodies.
5. Free body diagram should also indicate the necessary dimensions which
helps in computation of moments of forces.
Moment of force will be studied later in this chapter.
Some of the FBD of force systems are shown in Fig. 1.42 & 1.43.
The free-body diagram of a body is drawn by removing all the supports
(i.e wall, floor, hinge or any other body) and replacing them by the reactions and
external forces.
P
R
P
W
F= RA
B
L
R AH
M A
R AV
A
P
B
(FB D )
(FB D )(a) (b)
P
==
Fig. 1.43
Force System-Centroid and Moment of Inertia 1.39

Problem 1.8: Draw a free-body diagram of a sphere of weight 50 N restingon a frictionless plane surface as shown in Fig (i).
The sphere exerts a downward
force W50N on the surface.
When the sphere is resting on the
surface, a reaction RA which is equal
and opposite to the force 50N is exerted
on the sphere by the surface at the point
of contact A.
The sphere is in equilibrium
under the action of two equal and opposite forces W and RA which are passing
through the centre of the sphere.
Problem 1.9: A bar PQ of weight 100N is hinged at P to the wall and issupported in a vertical plane by the string QD as shown in Fig. Draw thefree-body diagram of the bar.
(i) Weight W (100 N) acting vertically downward
(ii) The tension T of the string along QD, and
(iii) The reaction Rp at the hinge in an unknown direction. Since the bar
PQ is in equilibrium under the action of three non-parallel forces, so
they must pass through the common point O.
A
R AFig.
A
W
C
W
C
(I) (ii)
P
P
Q
Q
D
W
W = 100N
C
C
OT
R P
Fig.(i) (ii)G iven Fig
Free B ody Diagram
1.40 Elements of Mechanical Engineering www.airwalkpublications.com

Problem 1.10: Two spheres P and Q (Fig.(a)) each of weight W1 and
W2 respectively rest inside a hollow cylinder which is resting on a horizontal
plane. Draw the free-body diagrams of: (a) Both the spheres taken together (b) The sphere P separately. (c) The sphere Q separately.
Solution:
Refer Fig. (b)
RA Reaction at the point A offered by
cylinder wall
RB Reaction at the point B offered by
cylinder bottom
RC Reaction offered by cylinder wall at C
Fig. (b) Free-body diagram of spheres P and Q.
The reaction at the point of contact D will not appear in the free-body
diagram, since it is an internal force between the two spheres
Fig. (c) Free-body diagram of sphere P
RDbyQ is the reaction of the sphere Q on the sphere P acting at the
point of contact D. It is acting in the direction normal to the surface. i.e
along C1C2
A
P
Q
C
B
D
Fig.(a)
w 1
w 2
R A
R A
R B
R B
R C
R C
A
AP
P
Q
Q
D
D
D
W 2
W 2
C 2
C 2
C
CC 1
C 1
W 1
W 1
B
BR by PD
(b) Fig. FBD. ( c ) (d)
R by QD
Force System-Centroid and Moment of Inertia 1.41

Fig.(d) Free-body diagram of sphere Q
RDbyP is the reaction of the sphere P on the sphere Q acting at the
point of contact D
RDbyQ and RDbyP are equal in magnitude, opposite in direction and
are acting along common points C1 and C2.
They do not appear in the combined free-body diagram of the two
spheres since they cancel each other.
1.10 EQUILIBRIUM OF A THREE FORCE BODYWhen a particle is subjected to
three forces and is in equilibrium, they
must form a closed triangle when
polygon law of forces is applied to the
force system.
A three-force member: A body
which has forces applied onto it at only
three points, and no couples applied
onto it at all, is called a three-force
member. A three-force member can
only be in equilibrium if the lines of
action for the resultants of the forces at
each point intersect at a single point.
F 2
F 1
12
W
W F 1
F 2
1.42 Elements of Mechanical Engineering www.airwalkpublications.com
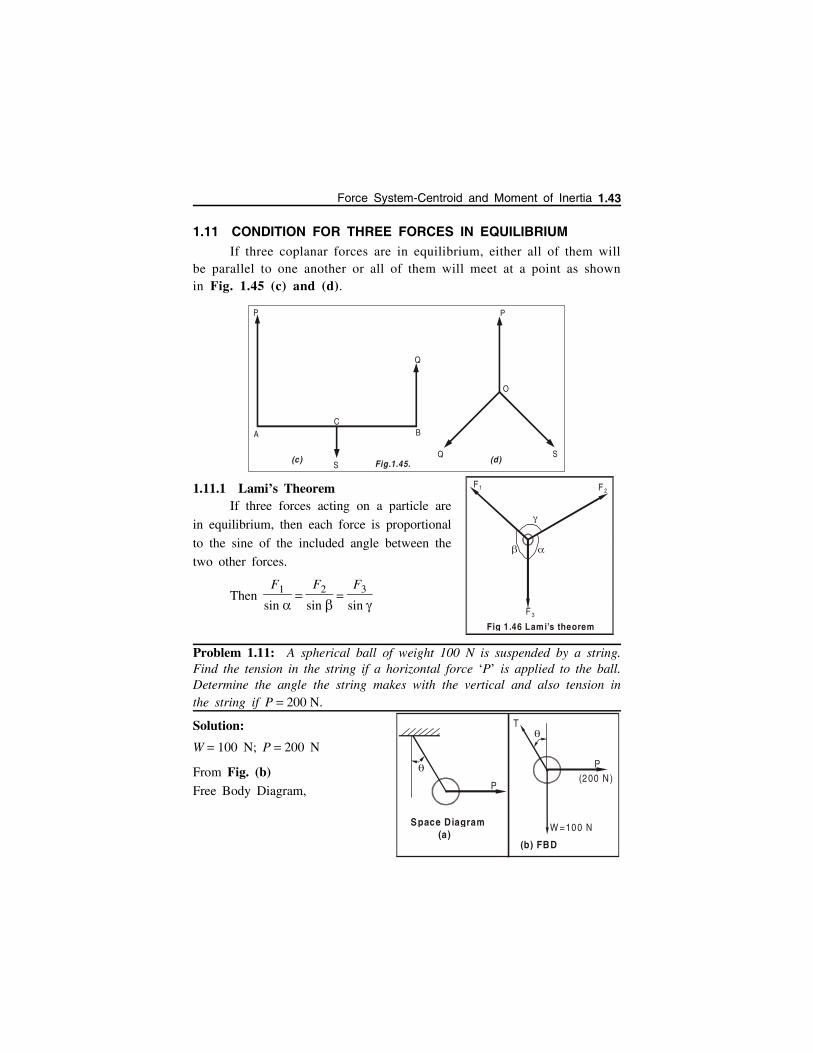
1.11 CONDITION FOR THREE FORCES IN EQUILIBRIUMIf three coplanar forces are in equilibrium, either all of them will
be parallel to one another or all of them will meet at a point as shownin Fig. 1.45 (c) and (d).
1.11.1 Lami’s TheoremIf three forces acting on a particle are
in equilibrium, then each force is proportional
to the sine of the included angle between the
two other forces.
Then F1
sin
F2
sin
F3
sin
Problem 1.11: A spherical ball of weight 100 N is suspended by a string.Find the tension in the string if a horizontal force ‘P’ is applied to the ball.Determine the angle the string makes with the vertical and also tension inthe string if P 200 N.
Solution:
W 100 N; P 200 N
From Fig. (b) Free Body Diagram,
A BC
S
P
Q
P
Q S
O
Fig.1.45.(c) (d)
F1 F 2
F 3
Fig 1.46 Lami’s theorem
P
(a)
P
T
(b) FBD
W =100 N
(200 N)
Space Diagram
Force System-Centroid and Moment of Inertia 1.43

Using Equations of equilibrium,
Fx 0; T sin 200 0
Fy 0; T cos 100 0
T sin 200
T cos 100
tan 2
tan 1 2 63.43
T sin 63.43 200
T 200
sin 63.43 223.6 N
Using Lami’s Theorem (Fig. (c))
Tsin 90
W
sin 90
Psin 180
Tsin 90
100
sin 90
200sin 180
Tsin 90 100 sin 90 100
T cos 100 ...(i)
T sin 180 200 sin 90 200
T sin 200 ...(ii)
Dividing (ii) by (i)
T sin T cos
200100
2; tan 2
tan 1 2 63.43
T sin 200
T sin 63.43 200
T 223.6 N
1.44 Elements of Mechanical Engineering www.airwalkpublications.com

Problem 1.12: Two cables AB and CB are tied together at B. It is loadedby a weight of 100 N as shown in the Fig.(a). Determine the Tensions inthe cable AB and CB
Solution:
(i) Find 1 & 2
From space diagram
tan 1 5050
1 tan 1 1 45
tan 2 20025
2 tan 1 20025
82.87
(ii) From FBD
Using Lami’s theroem
Wsin 180 1 2
TBC
sin 1 90
TAB
sin 2 90
100
sin 180 45 82.87
TBC
sin 45 90
TAB
sin 82.87 90
50m m
50m m 25m m
B
200 mm
CA
W =100 N
(a) Space Diagram Fig (b) FBD
B1 2
90o
90o
W = 100 N
T ABT BC
Force System-Centroid and Moment of Inertia 1.45

1000.7894
TBC
sin 135
TAB
sin 172.87
126.92 TAB
sin 172.89
Tension in TAB 126.67 sin 172.87 15.72 N
126.67 TBC
sin 135
Tension in TBC 126.67 sin 135 89.56 N
Problem 1.13: Three links AB, BC, CD are carrying two loads 100 N andW at B and C respectively as shown in Fig.(a). The string AD is attachedto ceiling. Calculate the tension in the strings AB, BC, CD and W.
Solution:From space diagram (a)
tan 1 1
0.5 or 1 63.44
tan 2 1
0.6 or 2 59.04
0.5m
B
1m
A
C
D
0.6m
1m
100 N W
Fig.(a) Space diagram
T B C
TC D
W
21 B
C
T B C
100 N
TA B
Fig.(b) Fig. (c)
1.46 Elements of Mechanical Engineering www.airwalkpublications.com

Refer Fig. B
Applying Lami’s Theorem to equilibrium at B
TAB
sin 90
TBC
sin 90 1
100sin 180 1
TAB
sin 90
100sin 116.56
TAB 100 1
sin 116.56 111.8 N
TBC
sin 90 63.44
100sin 116.56
TBC 100 sin 153.44
sin 116.56 50 N
Refer Fig. (c)
Applying Lami’s Theorem at C
TBC
sin 90 2
Wsin 180 2
TCD
sin 90
Wsin 120.96
TBC
sin 149.04
W 50 sin 120.96
sin 149.04 83.35 N
TCD 50 sin 90
sin 90 59.04 97.19 N
Tensions in the links AB 111.8 N, BC 50 N, CD 97.19 N and
load W 83.35 N
Force System-Centroid and Moment of Inertia 1.47
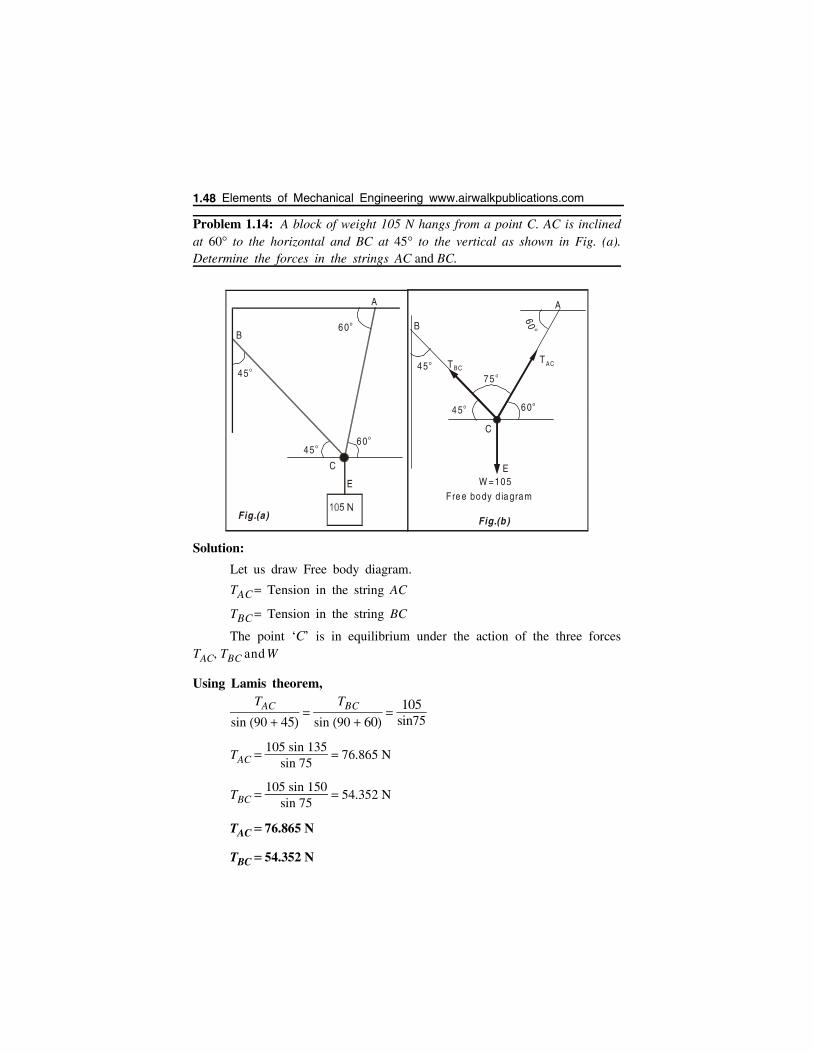
Problem 1.14: A block of weight 105 N hangs from a point C. AC is inclinedat 60 to the horizontal and BC at 45 to the vertical as shown in Fig. (a).Determine the forces in the strings AC and BC.
Solution:
Let us draw Free body diagram.
TAC Tension in the string AC
TBC Tension in the string BC
The point ‘C’ is in equilibrium under the action of the three forcesTAC, TBC and W
Using Lamis theorem,TAC
sin 90 45
TBC
sin 90 60
105sin75
TAC 105 sin 135
sin 75 76.865 N
TBC 105 sin 150
sin 75 54.352 N
TAC 76.865 N
TBC 54.352 N
A
B
C
45o
60o
60o
45 o
E
Fig.(a)
B
A
C
45 o
45o
75 o
60o
60o
EW =105
TACTBC
Fre e body d iagram
Fig.(b)
1.48 Elements of Mechanical Engineering www.airwalkpublications.com
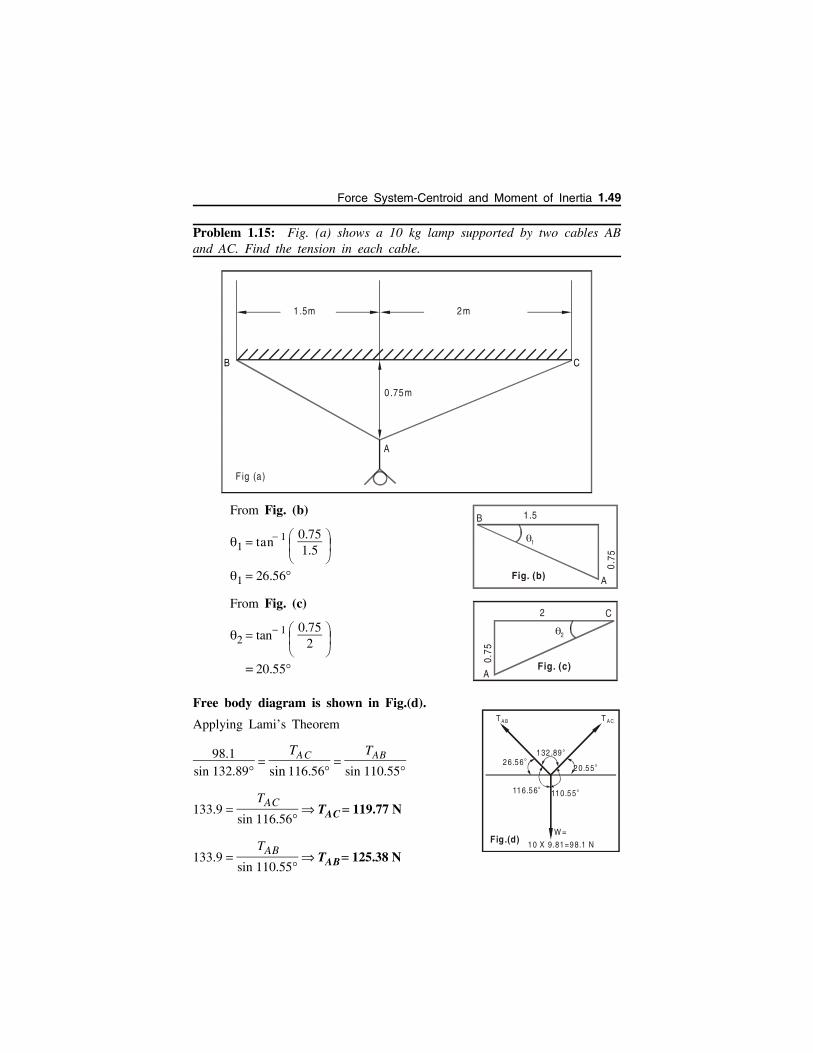
Problem 1.15: Fig. (a) shows a 10 kg lamp supported by two cables ABand AC. Find the tension in each cable.
From Fig. (b)
1 tan 1 0.751.5
1 26.56
From Fig. (c)
2 tan 1 0.75
2
20.55
Free body diagram is shown in Fig.(d).
Applying Lami’s Theorem
98.1sin 132.89
TAC
sin 116.56
TAB
sin 110.55
133.9 TAC
sin 116.56 TAC 119.77 N
133.9 TAB
sin 110.55 TAB 125.38 N
1 .5m 2m
0.75m
A
B C
Fig (a)
1
1 .5B
A
0.75
Fig. (b)
A
C
2
2
0.75
Fig. (c)
116.56o
110.55o
26.56 o
20.55o
132 .89 o
T A B T A C
10 X 9.81=98.1 N
W =Fig.(d)
Force System-Centroid and Moment of Inertia 1.49
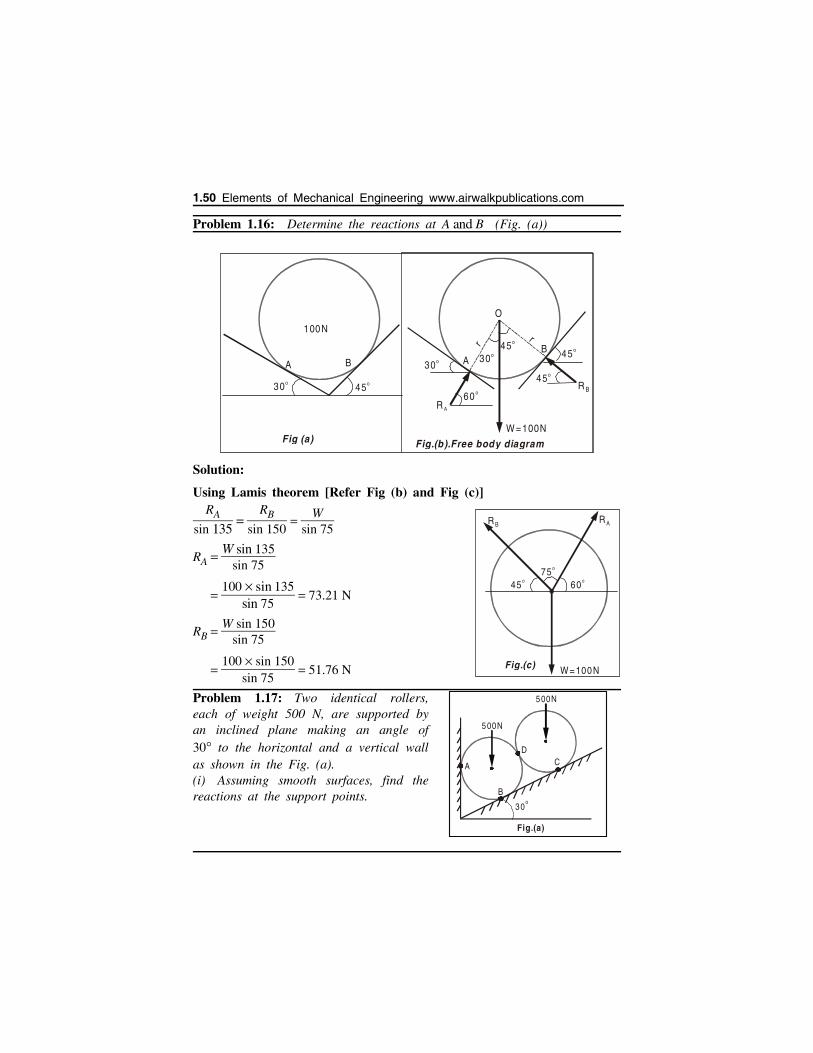
Problem 1.16: Determine the reactions at A and B (Fig. (a))
Solution:
Using Lamis theorem [Refer Fig (b) and Fig (c)]RA
sin 135
RB
sin 150
Wsin 75
RA W sin 135
sin 75
100 sin 135
sin 75 73.21 N
RB W sin 150
sin 75
100 sin 150
sin 75 51.76 N
Problem 1.17: Two identical rollers,each of weight 500 N, are supported byan inclined plane making an angle of30 to the horizontal and a vertical wallas shown in the Fig. (a).(i) Assuming smooth surfaces, find thereactions at the support points.
45o30o
A B
100N
Fig (a)
30o45o
30o45o
45o
O
ABr
r
60o
R A
R B
W =100N
Fig.(b).Free body diagram
60o45o
W =100N
R AR B
Fig.(c)
75o
30o
500N
500N
A
B
CD
Fig.(a)
1.50 Elements of Mechanical Engineering www.airwalkpublications.com
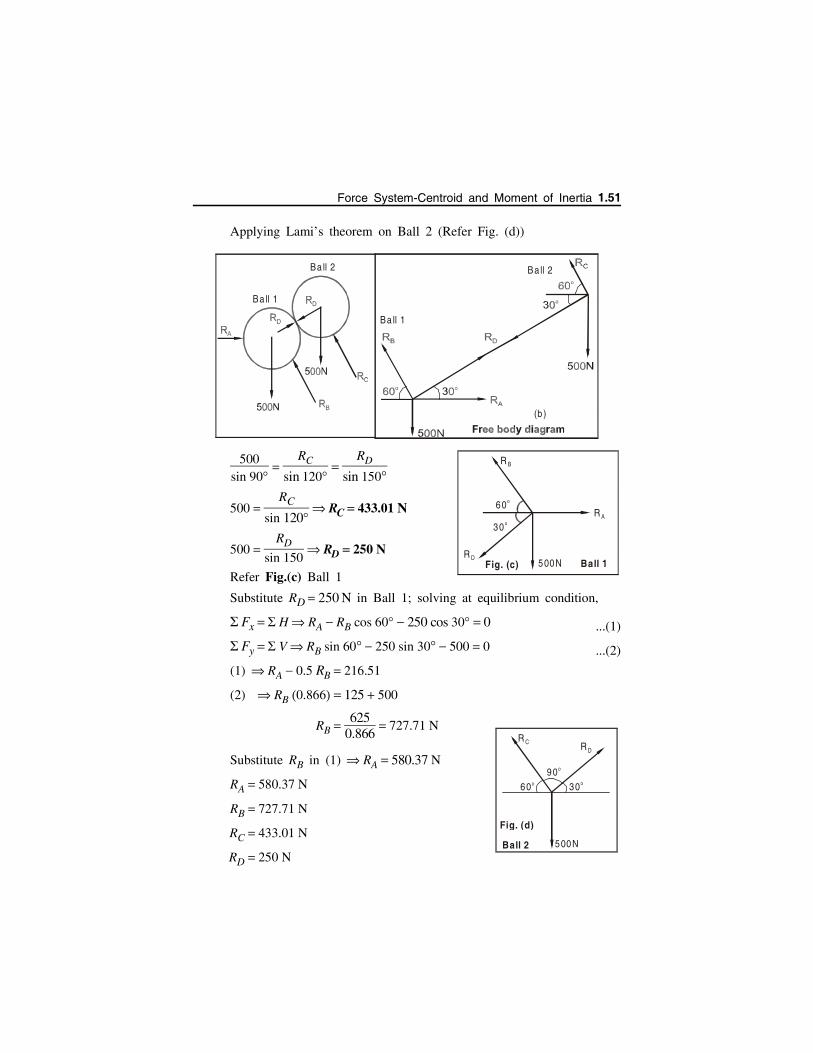
Applying Lami’s theorem on Ball 2 (Refer Fig. (d))
500sin 90
RC
sin 120
RD
sin 150
500 RC
sin 120 RC 433.01 N
500 RD
sin 150 RD 250 N
Refer Fig.(c) Ball 1
Substitute RD 250 N in Ball 1; solving at equilibrium condition,
Fx H RA RB cos 60 250 cos 30 0 ...(1)
Fy V RB sin 60 250 sin 30 500 0 ...(2)
(1) RA 0.5 RB 216.51
(2) RB 0.866 125 500
RB 625
0.866 727.71 N
Substitute RB in (1) RA 580.37 N
RA 580.37 N
RB 727.71 N
RC 433.01 N
RD 250 N
(b )
Ba ll 1
Ba ll 1
Ba ll 2 Ba ll 2
Fig. (d)
60o
R C R D
30o
500N
90o
Ball 2
60o
R A
R B
R D
30o
500NFig. (c) Ball 1
Force System-Centroid and Moment of Inertia 1.51

Problem 1.18: A ball of weight Q 12 kN rests in a right angled troughas shown in Fig (a). Determine the forces exerted on the sides of the troughat D and E, if all faces are perfectly smooth.
Solution:
Refer Fig. (c)
Using Lamis theorem
RD
sin 120
RE
sin 150
Wsin 90
RD Q sin 120
sin 90
12 sin 120
sin 90 10.392 N
RE Q sin 150
sin 90
12 sin 150
sin 90 6 kN
60o30
o
D E
Q =12kN
Fig a
30o 45
o
30o 60
o
30o
O
DE
r r
60o
R D
R E
Q =12kN
Fig.(b).Free body diagram
60o30o
Q =12kN
R DR E
Fig.( c )
90o
1.52 Elements of Mechanical Engineering www.airwalkpublications.com

Problem 1.19: Two cylinders of diameters 100 mm, and 50 mm, weighing200 N and 50 N, respectively are placed in a trough as shown in Fig.Neglecting friction, find the reactions at contact surfaces 1,2,3 and 4.
Solution:
Given data
W1 50 N
W2 200 N
d1 50 mm
r1 25 mm
d2 100 mm
r2 50 mm
Distance between the walls 120
mm 45 (inclined wall)
Draw the free body diagram for
both the cylinders individually.
Find the inclination of both the
cylinders let it be inclined at .
r1 r2 25 50 75
O1 to O2 75 mm
O1 to P 45 m
Let O2 to P x mm
x 752 452
x 60 mm
tan O2 P
O1 P
6045
1.33
53.13
50N
200N
120mm
1
3
4
2= 45o
2R 1
R 2
R 4R 450N
200 N
1
Fig.(a)
R 3
12025 5045
45O 1
O 2
r2
r1
P
x
Fig.(b)
Force System-Centroid and Moment of Inertia 1.53

For 1st cylinder (Refer Fig. (c))
For 2nd cylinder (Refer Fig.(d))
R1 O1 W1 90 R3 O2 W2 90
R4 O1 W1 90 R4 O2 W2 90
90 53.13 90 53.13
143.13 36.87 R1 O1 R4 180 180 53.13
= 126.87 45 53.13 98.13 R2 O2 R3 180 45
135
Now applying lami’s theorem on the 1st cylinder Refer Fig. (c)
W1
sin 126.87
R1
sin 143.13
R4
sin 90
Given W1 50 N
50
sin 126.87
R1
sin 143.13
R4
sin 90
R1 50 sin 143.13
sin 126.87
R1 37.5 N
135 o
45 oR 3
R 2
R 4
W = 200N2
O 2
45+53 .13 = 98.13 o
90-= 36 .87 o
Fig.(d)
R 4
R 1126 .87 o
W = 50N1
90+= 143.13 o
C ylinder 1
Fig.(c)
O 1
C ylinder 2
1.54 Elements of Mechanical Engineering www.airwalkpublications.com

Similarly
50
sin 126.87
R4
sin 90
R4 50 sin 90sin 126.87
R4 62.5 N
Substitute R4 62.5 N in 2nd cylinder, solving at (Refer Fig.(d))
equilibrium condition
Fx H R2 cos 45 R3 O R4 cos 53.13 0
0.707 R2 R3 62.5 0.6 0
0.707R2 R3 37.5 0 ...(1)
Fy V R2 sin 45 0 W2 R4 sin 53.13 0
0.707 R2 200 62.5 0.8 0
0.707 R2 200 49.99 0
0.707 R2 249.99
R2 249.990.707
R2 353.59 N ...(2)
Substituting R2 353.59 N in equation (1), we get
0.707 353.59 R3 37.5 0
R3 287.5 N
Result
R1 375 N ; R2 353.59 N
R3 287.5 N ; R4 62.5 N
Force System-Centroid and Moment of Inertia 1.55
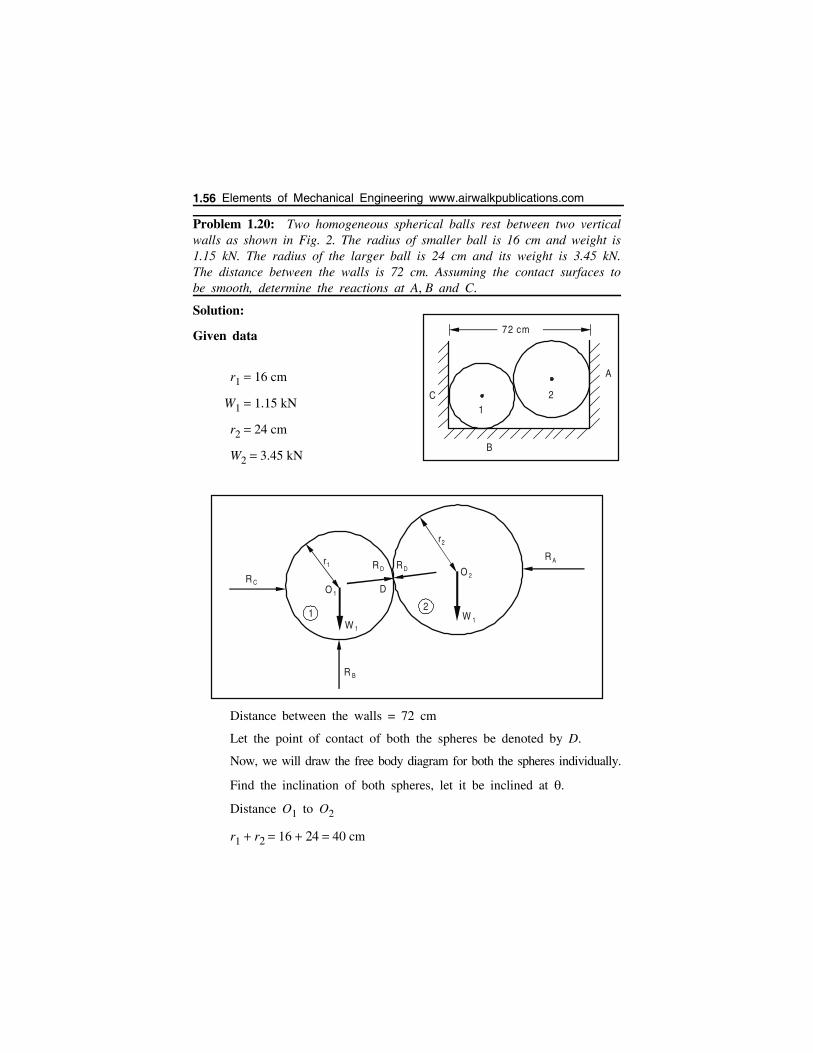
Problem 1.20: Two homogeneous spherical balls rest between two verticalwalls as shown in Fig. 2. The radius of smaller ball is 16 cm and weight is1.15 kN. The radius of the larger ball is 24 cm and its weight is 3.45 kN.The distance between the walls is 72 cm. Assuming the contact surfaces tobe smooth, determine the reactions at A, B and C.
Solution:
Given data
r1 16 cm
W1 1.15 kN
r2 24 cm
W2 3.45 kN
Distance between the walls = 72 cm
Let the point of contact of both the spheres be denoted by D.
Now, we will draw the free body diagram for both the spheres individually.
Find the inclination of both spheres, let it be inclined at .
Distance O1 to O2
r1 r2 16 24 40 cm
C
B
A
72 cm
1
2
R C
R B
R A
W 1
W 1
O 1
O 2
D
R D R Dr1
r2
12
1.56 Elements of Mechanical Engineering www.airwalkpublications.com
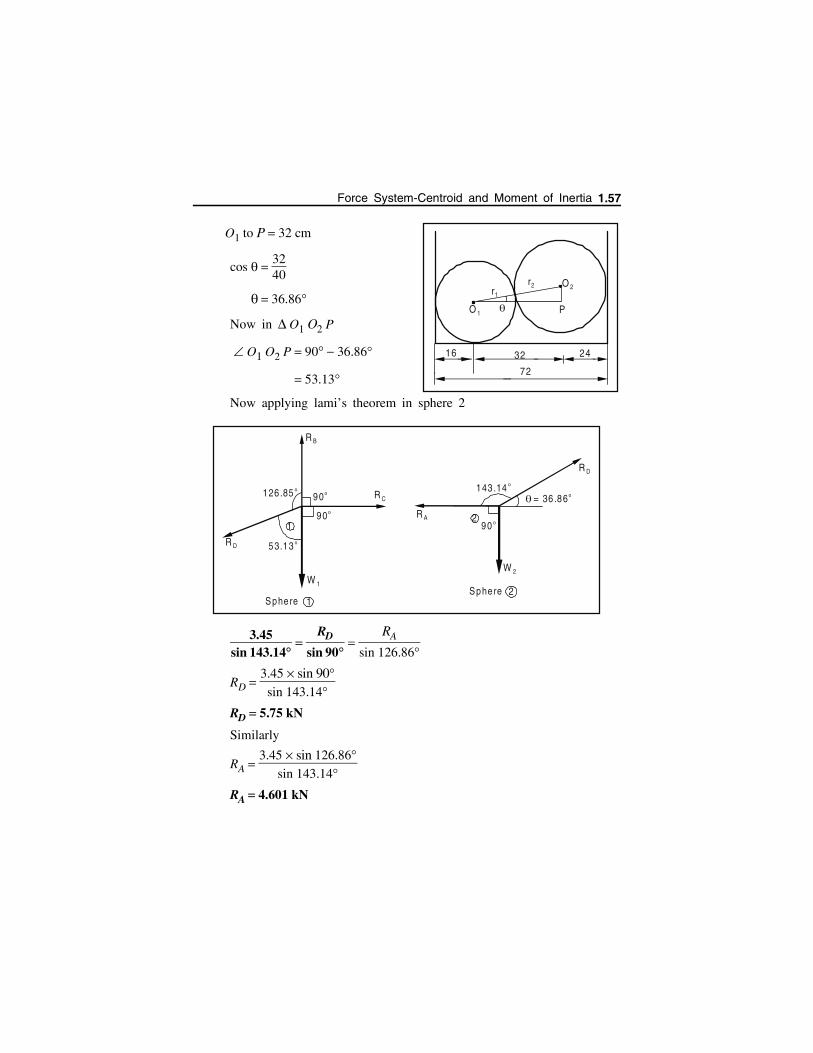
O1 to P 32 cm
cos 3240
36.86
Now in O1 O2 P
O1 O2 P 90 36.86
53.13
Now applying lami’s theorem in sphere 2
3.45sin 143.14
RD
sin 90
RA
sin 126.86
RD 3.45 sin 90
sin 143.14
RD 5.75 kN
Similarly
RA 3.45 sin 126.86
sin 143.14RA 4.601 kN
R D
R B
R C
53.13 o
126 .85 o
90o
90o
W 1
1R A
R D
90 o
143 .14 o
W 2
= 36 .86o
2
1SphereSphere 2
72
32 2416
O 1
O 2r2
r1
P
Force System-Centroid and Moment of Inertia 1.57
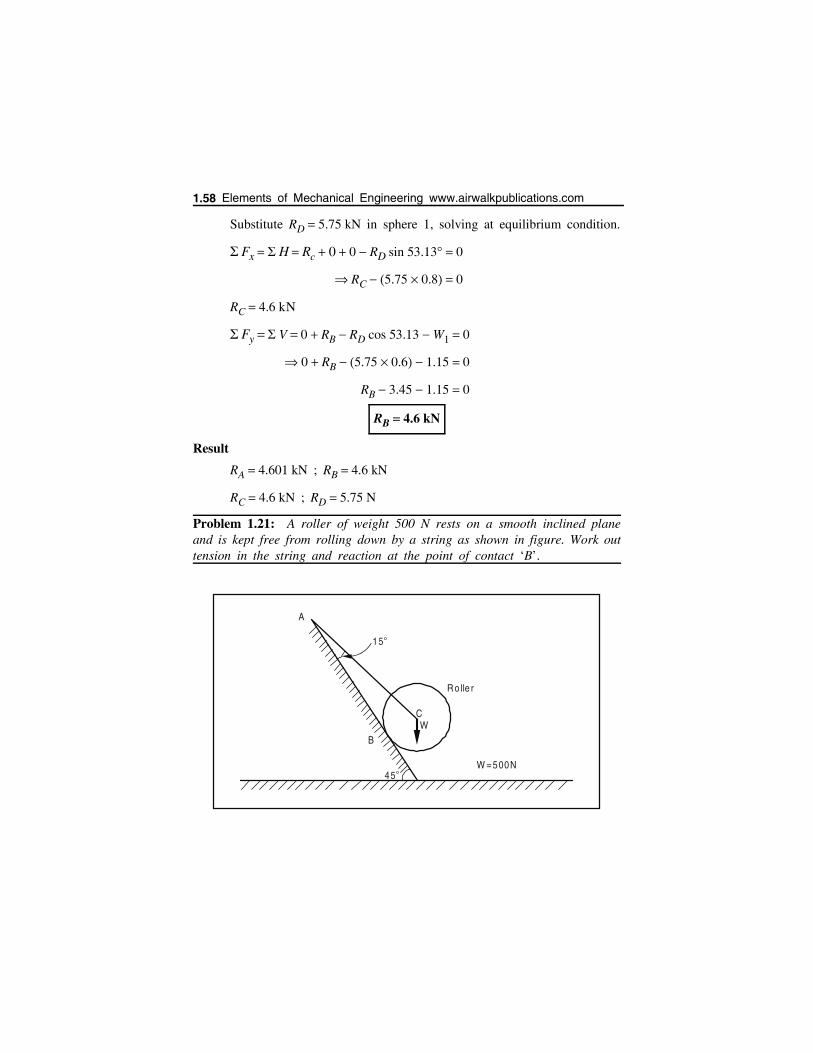
Substitute RD 5.75 kN in sphere 1, solving at equilibrium condition.
Fx H Rc 0 0 RD sin 53.13 0
RC 5.75 0.8 0
RC 4.6 kN
Fy V 0 RB RD cos 53.13 W1 0
0 RB 5.75 0.6 1.15 0
RB 3.45 1.15 0
RB 4.6 kN
Result
RA 4.601 kN ; RB 4.6 kN
RC 4.6 kN ; RD 5.75 N
Problem 1.21: A roller of weight 500 N rests on a smooth inclined planeand is kept free from rolling down by a string as shown in figure. Work outtension in the string and reaction at the point of contact ‘B’.
A
15o
R o lle r
B
W =500N45o
CW
1.58 Elements of Mechanical Engineering www.airwalkpublications.com

Solution:
First we draw the free body
diagram
Let RB Reaction of the
inclined wall at B on sphere.
T Tension of the str ing
To find
(angle made by AO with OB)
The right angled triangle OAB
But OAB 15, and
ABO 90
BOA 90 15
75
Similarly the angle between W and RB 45
To apply lami’s theorem at O, the fig is modified.
Here the Reaction RB is taken as
outward force.
The angle between Tension T and
weight W
45
120
The angle between Tension T and
Reaction RB
180
180 75
105
B
R B
45o
45o
W =500N
A
15o
O
T
W
T
R B
30o
45o
120o 135o
105o
O
Force System-Centroid and Moment of Inertia 1.59
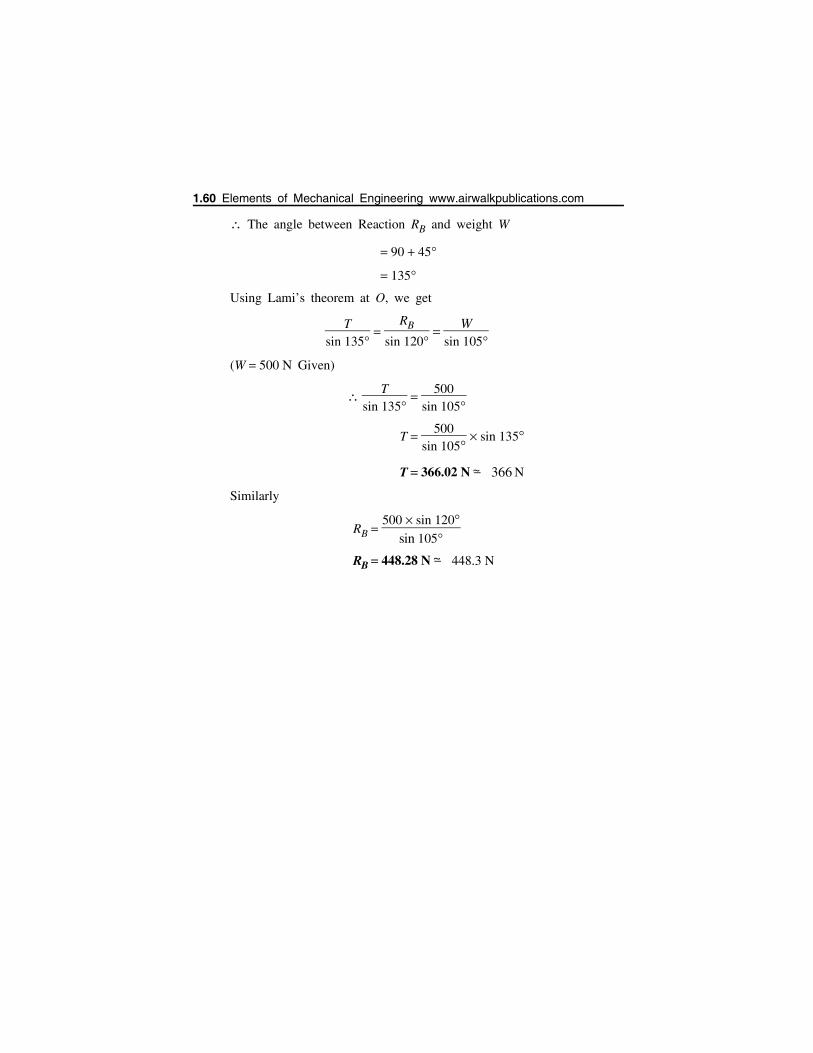
The angle between Reaction RB and weight W
90 45
135
Using Lami’s theorem at O, we get
Tsin 135
RB
sin 120
Wsin 105
(W 500 N Given)
T
sin 135
500sin 105
T 500
sin 105 sin 135
T 366.02 N ~ 366 N
Similarly
RB 500 sin 120
sin 105
RB 448.28 N ~ 448.3 N
1.60 Elements of Mechanical Engineering www.airwalkpublications.com


![1. Calculate degree of indeterminacy of propped … 6501 STRUCTURAL ANALYSIS I UNIT I 1. Calculate degree of indeterminacy of propped cantilever beam. [M/J-15] For beams degree of](https://static.fdocuments.net/doc/165x107/5ab2bf0d7f8b9a6b468dc858/1-calculate-degree-of-indeterminacy-of-propped-6501-structural-analysis-i-unit.jpg)