
Einführung in die GEODÄTISCHE -...
291
Professur für Geodätische Messtechnik Institut für Geodäsie und Photogrammetrie Einführung in die GEODÄTISCHE MESSTECHNIK Prof. Dr. H. Ingensand Auflage 2004 Band
-
Upload
truongduong -
Category
Documents
-
view
239 -
download
1
Transcript of Einführung in die GEODÄTISCHE -...
Professur für Geodätische MesstechnikInstitut für Geodäsie und Photogrammetrie
Einführung in die
GEODÄTISCHE
MESSTECHNIK
Prof. Dr. H. Ingensand
Auflage 2004
Band
Vorwort Das vorliegende zweibändige Skript „Einführung in die Geodätische Messtech-nik“ dient primär der Basisausbildung von Studierenden der Studiengänge Geo-matik und Planung, sowie Bau- und Umweltingenieurwissenschaften. Das Skript geht jedoch über den Inhalt der Grundzüge-Vorlesung hinaus und dient damit den weiterführenden Lehrveranstaltungen und als Nachschlagewerk für die we-sentlichen Aufgabenstellungen in der Praxis. Im Gegensatz zur Grundlagenliteratur der geodätischen Messtechnik wird in dem vorliegenden Skript bewusst auf die Darstellung von heute kaum noch ge-bräuchlichen klassischen Messverfahren und -methoden verzichtet. Es finden sich aber Hinweise auf die entsprechende Literatur. Statt dessen wurde das Skript um die Darstellung moderner Lasermesstechniken und kinematischer Verfahren, wie sie heute in der Geomatik und im Bauwesen zur Anwendung kommen, erweitert. Damit soll zum besseren interdisziplinären Verständnis bei-getragen werden. Obwohl das Skript auf die speziellen Belange der Schweiz ausgerichtet ist, wur-de auf die internationale Nomenklatur, insbesondere im Bereich der geodäti-schen Statistik und Toleranzen geachtet, um im Sinne eines Qualitätsmanage-ments Missverständnisse zu vermeiden. Konzeptionell ist das Skript so aufgebaut, dass in den einzelnen Kapiteln ein Thema zunächst präsentiert wird und nachfolgend anhand von Beispielen im Selbststudium vertieft werden kann. Ferner ist ein Sachwortregister angehängt, das den Studierenden bei der Suche nach spezifischen Themen behilflich ist. Das Skript und zusätzlich ein Sachwortregister in italienischer und französischer Sprache steht den Studierenden unter „www.geometh.ethz.ch → Studierende“ zum Download zur Verfügung. An der gleichen Stelle finden Studierende aus-serdem zahlreiche Excel-Programme für die Bearbeitung der vermessungstech-nischen Aufgabenstellungen. Mein Dank gilt allen Assistierenden und Hilfsassistierenden, die am vorliegen-den Skript mitgearbeitet haben. Herrn Dr. Stephan Zinndorf danke ich für die Erstellung des Kapitels „Photogrammetrie“. Besonders möchte ich mich bei Herrn Wido Wilhelm bedanken, der für die Redaktion zuständig war und immer wieder für die Aktualisierung und Verbesserung des Skriptes gesorgt hat. Zürich, im Frühjahr 2004 Prof. Dr. Hilmar Ingensand
Übersicht Seite A
Einführung in die Geodätische Messtechnik
Übersicht über Band 1 und 2 Band 1
1. Allgemeine Grundlagen
1.1. Einleitung 1.2. Einordnung der Geodäsie 1.3. Aufgabengebiete und Anwendungsbereiche der Geodäsie 1.4. Stellung der GMT im interdisziplinären Kontext 1.5. Arbeitsprinzipien im Bereich der Geodäsie 1.6. Geodätische Bezugsflächen 1.7. Geodätische Koordinatensysteme 1.8. Ebene, kartesische Koordinatensysteme 1.9. Masseinheiten und Massverhältnisse in der GMT
2. Basismesstechnik und einfache Hilfsmittel
2.1. Einfache Hilfsmittel 2.2. Einfache Verfahren zur Lageaufnahme 2.3. Aufstellen eines geodätischen Sensors (Instrument) 2.4. Zwangszentrierung 2.5. Sicherheit von Messequipen
3. Ebenes Koordinatenrechnen
3.1. Definition des geodätischen Koordinatensystems und Bezeichnungen 3.2. Erste Geodätische Hauptaufgabe (= polares Anhängen) 3.3. Zweite Geodätische Hauptaufgabe 3.4. Koordinatentransformation
4. Terrestrische Koordinatenbestimmung (Netzverdichtung)
4.1. Fixpunktfeld der Landes- und Amtlichen Vermessung 4.2. Fixpunktnetze der Ingenieurgeodäsie 4.3. Terrestrische Methoden der Netzverdichtung 4.4. Richtungs- und Winkelmessung 4.5. Der Abriss 4.6. Distanzreduktion 4.7. Die Exzentrische Richtungsmessung 4.8. Angewandte Methoden der polygonometrischen Bestimmungsarten 4.9. Angewandte Methoden der Einzelpunkteinschaltung
Seite B Übersicht
5. Höhenbestimmung
5.1. Methoden der Höhenbestimmung 5.2. Höhensysteme 5.3. Höhennetze in der Schweiz 5.4. Geometrisches Nivellement mit Nivellierinstrumenten 5.5. Trigonometrische Höhenbestimmung 5.6. Motorisierte Verfahren 5.7. Barometrische Höhenmessung 5.8. Hydrostatisches Nivellement 5.9. Höhenbestimmung mit GPS 5.10. Weitere Höhenbestimmungsmethoden
6. Geodätische Statistik
6.1. Aufgabe 6.2. Fehlerarten und zufällige Abweichungen 6.3. Grundlagen 6.4. Verteilungsfunktionen 6.5. Genauigkeitsmasse 6.6. Gewicht 6.7. Korrelation 6.8. Vertrauensintervall (Bereichsschätzung) 6.9. Varianzfortpflanzung 6.10. Beschreibung der Punktgenauigkeit 6.11. Zuverlässigkeit und Schutz vor groben Fehlern 6.12. Einführung in die Ausgleichungsrechnung 6.13. Beispiele zu den Kapiteln 6.14. Neue und alte Begriffsbildung in der geodätischen Statistik 6.15. Toleranzen im Bauwesen 6.16. Zusammenfassung der wichtigsten statistischen Formeln in der GMT
Übersicht Seite C
Band 2
7. Die Aufnahme
7.1. Grundsätzliches zur Aufnahme 7.2. Methodik bei der Aufnahme 7.3. Prinzip der Messverfahren 7.4. Messverfahren zur Erfassung von Situation und Geländeform 7.5. Genauigkeitsforderungen und Kontrollen 7.6. Auswertung der Aufnahmedaten 7.7. Darstellungsformen von Informationen in Plänen und Karten 7.8. Das digitale Geländemodell
8. Die Absteckung
8.1. Grundlagen und Methodik 8.2. Abstecken von Richtungen 8.3. Abstecken von Ebenen 8.4. Abstecken von 1D-, 2D- und 3D-Koordinaten 8.5. Beispiele zu den Absteckverfahren 8.6. Abstecken von Verkehrsanlagen 8.7. Die Absteckung im allgemeinen Hochbau, 2-D Koordinaten
9. Instrumente der Geodätischen Messtechnik
9.1. Optik geodätischer Messinstrumente 9.2. Aufbau und Funktion eines Geodätischen Messfernrohres 9.3. Das menschliche Auge und der Sehsinn 9.4. Instrumente zur Neigungsmessung 9.5. Aligniergeräte (Fluchtungsgeräte) 9.6. Lotgeräte 9.7. Nivellierinstrumente 9.8. Richtungs- und Winkelmessung mit einem Theodoliten 9.9. Vermessungskreisel 9.10. Mechanische und optische Distanzmessung 9.11. Elektronische Distanzmessung 9.12. Tachymeter und Totalstationen 9.13. Das Globale Positionierungssystem (GPS)
10. Photogrammetrie
10.1. Einleitung 10.2. Aufnahmemethoden 10.3. Grundlagen 10.4. Auswerteverfahren 10.5. Anwendungen 10.6. Terrestrische Photogrammetrie im Hinblick auf Anwendungen im Architektur- und Baubereich
Seite D Literaturverzeichnis
Einführung in die Geodätische Messtechnik
Literaturverzeichnis
Übergreifende Literatur
DEUMLICH, F.; STAIGER, R. [1998]: Instrumentenkunde. Leitfaden für die Praxis der Vermessung, Wichmann Verlag, 9. neubearbeitete Auflage.
ELMIGER, A.; CHAPERON, F. [1996]: Skript Geodätische Messtechnik I und II, IGP der ETH Zürich, 4. Auflage.
GRUBER, F.J. [1998]: Formelsammlung für das Vermessungswesen, Dümmler Verlag Bonn, 10. Auflage.
HÄSSLER, J.; WACHSMUTH, H. [1990]: Formelsammlung für den Vermessungsbe-ruf, Wilhelm Bing Verlag, 4. Auflage.
JOECKEL, R.; STOBER, M. [1995]: Elektronische Entfernungs- und Richtungsmes-sung, 3. Auflage, Verlage Wittwer, Stuttgart.
JORDAN, W.; EGGERT, O.; KNEISSL, M. [1963]: Handbuch der Vermessungskunde, Band II, III, VI, Verlag J.B.Metzlersche Verlagsbuchhandlung, 10. Auflage.
KAHMEN, H. [1997]: Vermessungskunde, Verlag Walter de Gruyter, 19. Auflage.
WITTE, B.; SCHMIDT, H. [1995]: Vermessungskunde und Grundlagen der Statistik für das Bauwesen, Verlag Konrad Wittwer, 3. Auflage.
Kapitel 1
ELMIGER, A.; CHAPERON, F. [1997]: Landesvermessung, Texte und Notizen zur Vorlesung, Bd.I und II, IGP der ETH Zürich.
HEISKANEN, W.A.; MORITZ, H. [1967]: Physical Geodesy, W.H. Freeman and Company.
HEITZ, S. [1988]: Coordinates in geodesy, Springer Verlag, New York-Berlin.
HEITZ, S.; STÖCKER-MEIER, E. [1998]: Grundlagen der physikalischen Geodäsie, Dümmler Verlag Bonn, 3. Auflage.
IMHOF, E. [1950]: Gelände und Karte, Eidgenössisches Militärdepartement, Erlen-bach-Zürich, Rentsch.
TORGE, W. [1975]: Geodäsie, Verlag Walter de Gruyter, Berlin – New York.
Literaturverzeichnis Seite E Kapitel 2
FRÖHLICH, H. [1995]: Vermessungstechnische Handgriffe, Verlag Dümmler, 4. Auf-lage.
LARDELLI, A. [1994]: Messen und Vermessen, Baufachverlag Dietikon, 2.Auflage.
MECKENSTOCK, H.J.[1967]: Zentrierung von Theodoliten mit Hilfe des optischen Lots, Vermessungstechnische Rundschau 29, S. 174 - 176.
MATTHIAS, H.J.; KASPER, P.; SCHNEIDER, D. [1980 - 1995]: Amtliche Vermes-sungswerke Band 1-4, Verlag Sauerländer.
WITTKE, H. [1971]: Geodätische Formelsammlung, Band I+II, Verlag Dümmler.
Kapitel 3
BRONSTEIN, I.N.; SEMENDJAJEW, K.A.; MUSIOL, G.; MÜHLIG, H. [1995]: Ta-schenbuch der Mathematik, Verlag Harri Deutsch, 2.Auflage.
KRAUS, K. [1997]: Photogrammetrie, Band 1, Grundlagen und Standardverfahren, Dümmler Verlag Bonn, 6.Auflage.
WITTKE, H. [1971]: Geodätische Formelsammlung, Band I+II, Verlag Dümmler.
Kapitel 4
SCHWARZ, W. [1995]: Vermessungsverfahren im Maschinen- und Anlagenbau, Ver-lag Konrad Wittwer.
WITTKE, H. [1971]: Geodätische Formelsammlung, Band I+II, Verlag Dümmler.
HÄSSLER, J.; WACHSMUTH, H. [1990]: Formelsammlung für den Vermessungsbe-ruf, Wilhelm Bing Verlag, 4. Auflage.
MATTHIAS, H.J.; KASPER, P.; SCHNEIDER, D. [1983]: Amtliche Vermessungswer-ke Band 1, Verlag Sauerländer.
SCHWARZ, W.; WITTE, B. [1986]: Die Prüfung elekrooptischer Distanzmesser am Geodätischen Institut der RWTH Aachen, Verlag Festschrift Hektor, Veröff. d. Ge-od. Inst. d. RWTH Aachen Nr. 40, Seite 15.1 bis 15.45.
RUEGER, J.M. [1990]: Electronic Distance Measurement, 3. Auflage, Verlag Springer, Berlin.
Seite F Literaturverzeichnis Kapitel 5
GOTTWALD, R. [1985]: Zur Genauigkeitssteigerung und Erfassung eines automati-sierten Datenflusses beim trigonometrischen Nivellement mit kurzen Zielweiten, Veröffentlichung des geod. Inst. der RWTH Aachen, Nr. 37.
GUBLER, E. et al. [1996]: Die Landesvermessung der Schweiz LV 95, In: VPK 2/96, S. 47 – 65.
HEISKANEN, W.A.; MORITZ, H. [1967]: Physical Geodesy, Verlag W.H. Freeman and Company.
INGENSAND, H.; SUDAU, A. [1982]: Untersuchung zur Genauigkeit und den Ein-satzmöglichkeiten eines Digitalbarometers nach dem piezoresistiven Prinzip. In: Ar-beiten zur Satellitengeodäsie, VLBI und geodätischen Messtechnik.
KAHLE, H.-G. [1988]: Einführung in die höhere Geodäsie, 2. Auflage, Verlag der Fachvereine an den schweizerischen Hochschulen und Techniken, Zürich.
RÜEGER, J.M; BRUNNER, F.K. [1982]: EDM-Height Traversing versus Geodetic Le-veling. In: The Canadian Surveyor, Vol. 36, No. 1, S. 69 – 88.
SEEBER, G. [1989]: Satellitengeodäsie, Verlag Walter der Gruyter, 1. Auflage.
SUDAU, A. [1994]: Untersuchungen zur Leistungsfähigkeit elektronischer Druckauf-nehmer für präzise barometrische Höhenmessungen, Verlag der Bayerischen Aka-demie der Wissenschaften.
WEBER, G. [1994]: Das neue gesamtdeutsche Haupthöhennetz DHHN92. In: Allge-meine Vermessungsnachrichten, Verlag Herbert Wichmann.
WIDMARK, J. BECKER, J.M. [1984]: The Motorized Levellingg Technique – The Swedish Experience, Professional Papers, LMV-Rapport 15, Landmäteriet – Na-tional Land Survey, Sweden.
WITTE, B. [1990]: Trigonometrisches Nivellement. In: Vermessungswesen und Raum-ordnung 52, Seiten 86-95, Verlag Verlag Ferd. Dümmler.
WIRTH, B. [1990]: Höhensysteme, Schwerepotentiale und Niveauflächen: Systemati-sche Untersuchungen zur zukünftigen terrestrischen und GPS-gestützten Höhenbe-stimmung in der Schweiz, Geodätische physikalische Arbeiten in der Schweiz, Hrsg. Schweizerische Geodätische Kommission, 42. Band.
WOLF, H. [1974]: Das Höhenproblem in der dreidimensionalen Geodäsie. In: Zeit-schrift für Vermessungswesen, Verlag Konrad Wittwer.
Kapitel 6
CAROSIO, A. [1994]: Fehlertheorie und Ausgleichungsrechnung, Vorlesungsskript, IGP der ETH Zürich, provisorische Auflage.
KOCH, K.R. [1987]: Parameterschätzung und Hypothesentests in linearen Modellen, Verlag Dümmler, 2. Auflage.

Literaturverzeichnis Seite G
KREYSZIG, E. [1991]: Statistische Methoden und ihre Anwendungen, Verlag Vanden-hoeck & Ruprecht, 7. Auflage.
RINNE, H.; MITTAG, H.-J. [1995]: Statistische Methoden der Qualitätssicherung, Ver-lag Manser, München.
SCHNEIDER, J. [1994]: Sicherheit und Zuverlässigkeit im Bauwesen, Verlag der Fachvereine.
Kapitel 7
APPIUS, G.; LINDENMANN, H.P. [1993]: Einsatzmöglichkeiten und -grenzen von di-gitalen Geländemodellen in der Projektierung von Verkehrsanlagen, Bundesamt für Strassenbau, Eidgenössisches Verkehrs- und Energiewirtschaftsdepartement.
BILL, R., FRITSCH, D. [1997]: Grundlagen der Geoinformationssysteme, Band I, 3. Auflage.
BILL R. [1996]: Grundlagen der Geoinformationssysteme, Band II.
GERVAIX, F. [1997]: Pencomputing: applications et perspectives, VPK 12/97.
HAKE, G., GRÜNREICH D. [1994]: Kartographie, Verlag Walter de Gruyter, 7. Auf-lage.
INGENSAND, H. [1996]: Neue Computertechnologien verändern Aufnahme und Ab-steckung, aus VPK.
MAAS, H-G. [1993]: Nachdiplomkurs ”Räumliche Informationssysteme”, Digitale Ge-ländemodelle, IGP der ETH Zürich.
MATTHIAS, H., KASPER, P., SCHNEIDER, D. [1983]: Amtliche Vermessungswerke, Band 3, Verlag Sauerländer.
Kapitel 8
IVT, INSTITUT FÜR VERKEHRSPLANUNG, TRANSPORTTECHNIK, STRAS-SEN- UND EISENBAHNBAU, ETH ZÜRICH [1993]: Strassenprojektrierung, 8. Auflage.
LARDELLI, A. [1994]: Messen und Vermessen, Baufachverlag Dietikon, 2. Auflage.
LORENZ, H. [1974]: Trassierung und Gestaltung von Strassen und Autobahnen, Bau-verlag GmbH Wiesbaden und Berlin.
KASPER, H., SCHÜRBA, W., LORENZ, H. [1968]: Die Klothoide als Trassierungs-element, Dümmler Verlag Bonn, 5. Auflage.
KLAUS, P. [1964]: Klothoidentafel, Sauerländer-Verlag, 4. Auflage, Herausgeber VSS Zürich.
Seite H Literaturverzeichnis Kapitel 9
BAUER, M. [1997]: Vermessung und Ortung mit Satelliten, Verlag Wichmann, 4.Auflage.
HECHT, E. [1994]: Optik, Verlag Addison-Wesley, 3.Auflage.
HENNES, M. [1995]: Entwicklung eines Messsystems zur Ermittlung von Turbulenz-parametern der Atmosphäre für Anwendungen in der Geodäsie, Deutsche Geodäti-sche Kommission, Reihe C, Nr. 438.
INGENSAND, H. [1995]: Neue digitale Nivelliertechniken und ihre Anwendungen. In: VPK 4, Seite 221-226.
INGENSAND, H. [1990]: Das WILD NA2000 - Das erste digitale Nivellier der Welt. In: Allgemeine Vermessungs-Nachrichten 97, Seite 201-210.
INGENSAND, H. [1985]: Ein Beitrag zur Entwicklung und Untersuchung hochgenauer elektrischer Neigungsmesssysteme für kontinuierliche Messungen, Deutsche Geodä-tische Kommission, Reihe C, Nr. 308.
JOECKEL, D., STOBER, M. [1995]: Elektronische Entfernungs- und Richtungsmes-sung, Verlag Wittwer, 3.Auflage.
MCELROY, S. [1994]: Getting Started with GPS Surveying, Verlag GPSCO, 2.Auflage.
MEISENHEIMER, D.[1996]: Vermessungsinstrumente aktuell, Verlag Konrad Witt-wer, Loseblattsammlung.
RÜEGER, J.M. [1990]: Electronic Distance Measurement, Verlag Springer, 3.Auflage.
SCHWARZ, W. [1995]: Vermessungsverfahren im Maschinen- und Anlagenbau, Ver-lag Konrad Wittwer, 1.Auflage.
SEEBER, G. [1988]: Satellitengeodäsie, Verlag Walter de Gruyter, 1.Auflage.
Diverse Herstellerprospekte
Kapitel 10
ALBERTZ, J., KREILING, W. [1989]: Photogrammetrisches Taschenbuch, Verlag Herbert Wichmann, 4. Auflage.
JORDAN, W., EGGERT, O., KNEISSL, M. [1972]: Handbuch der Vermessungskunde. Photogrammetrie, Band III a/1, a/2, a/3, Metzlersche Verlagbuchhandlung.
KRAUS, K. [1994]: Photogrammetrie, Band 1, Verlag Dümmler, 5. Auflage.
RUEGER, W., PIETSCHNER, J., REGENSBURGER, K. [1987]: Photogrammetrie: Verfahren und Geräte zur Kartenherstellung, Verlag Karl Regensburger, 5. Auflage.
SCHWIDEFSKY, K., ACKERMANN, F. [1976]: Photogrammetrie, Verlag B.G. Teub-ner.
Inhaltsverzeichnis Seite I
1. Allgemeine Grundlagen
1.1 Einleitung ........................................................................................................................................1
1.2 Einordnung der Geodäsie .............................................................................................................4
1.3 Aufgabengebiete und Anwendungsbereiche der Geodäsie.......................................................5
1.4 Stellung der GMT im interdisziplinären Kontext......................................................................8
1.5 Arbeitsprinzipien im Bereich der Geodäsie................................................................................9
1.6 Geodätische Bezugsflächen........................................................................................................ 10 1.6.1 Das Geoid....................................................................................................................................11 1.6.2 Das Rotationsellipsoid ................................................................................................................12 1.6.3 Die Schmiegungskugel (Gauss'sche Schmiegungskugel) .........................................................13 1.6.4 Die Ebene als Bezugsfläche .......................................................................................................13
1.7 Geodätische Koordinatensysteme............................................................................................. 14 1.7.1 Geographische Koordinaten .......................................................................................................14 1.7.2 Geozentrisches, erdfestes, kartesisches Koordinatensystem .....................................................15
1.8 Ebene, kartesische Koordinatensysteme.................................................................................. 16 1.8.1 Lokales Tangentialsystem und lokales topozentrisches System ...............................................16 1.8.2 Das schweizerische Koordinatensystem....................................................................................17 1.8.3 Reduktionen infolge der Projektion ...........................................................................................18 1.8.3.1 Reduktion auf die Projektionsfläche ....................................................................................18 1.8.3.2 Korrektur wegen Projektionsverzerrung..............................................................................19
1.8.4 Geodätische Bezugsrichtungen ..................................................................................................20
1.9 Masseinheiten und Massverhältnisse in der GMT ................................................................. 21 1.9.1 Aktuelle Definitionen von Länge und Zeit ................................................................................21 1.9.2 SI-Basiseinheiten und Vorsätze..................................................................................................21 1.9.3 Winkeleinheiten ..........................................................................................................................22 1.9.4 Abschätzungsformeln .................................................................................................................23 1.9.4.1 Erste Geodätische Fundamentalformel ................................................................................24 1.9.4.2 Kathetenzuschlagsformel......................................................................................................25
1.9.5 Massverhältnisse.........................................................................................................................25 1.9.6 Neigungsverhältnisse..................................................................................................................26

Seite II Zusammenstellung der wichtigsten Formelzeichen
Zusammenstellung der wichtigsten Formelzeichen
δ magnetische Deklination γ Meridiankonvergenz η kartographische Deklination ϕPM Geographische Breite der gemittelten X-Koordinaten von P1 und P2 ρ Winkelumwandlungsfaktor a grosse Halbachse des Ellipsoides Az(A,B) Azimut im Standpunkt A zum Zielpunkt B b kleine Halbachse des Ellipsoides B geographische Breite c Lichtgeschwindigkeit dhor meteokorrigierte Horizontaldistanz ds infinitesimales Streckenelement auf der Kugel
sd Projektion von ds auf den Zylinder D Distanz im Projektionssystem D0 auf Projektionsfläche reduzierte meteokorrigierte Horizontaldistanz e lineare Exzentrizität EAeq Erdäquator f Abplattung F Brennpunkt g Schwerevektor, Lot G Geozentrum Hm mittlere Höhe H' Hauptpunkt L geographische Länge m Massstabszahl M Massstab MGr Meridian von Greenwich N Geoidundulation PB Bildpunkt PS Theoretischer Schnittpunkt von Steh-, Kipp- und Zielachse PT Topozentrum, Standpunkt auf der Erdoberfläche PZ Zielpunkt Pol Erdpol R Radius der Schmiegungskugel RM Meridiankrümmungsradius RN Querkrümmungsradius W Potential der Schwerkraft (Gravitation) X Ordinate im Landeskoordinatensystem Xm mittlerer Nord/Süd-Abstand von Bern Y Abszisse im Landeskoordinatensystem
1.1 Einleitung Seite 1
1. Allgemeine Grundlagen
Stichwörter: Basis- und Nachbargebiete, Böschungsver-hältnis, Detailvermessung (Amtliche Vermessung), Deklina-tion, Ebene kartesische Koordinaten, Erdmessung, Erste Ge-odätische Fundamentalformel, Forschung, Geodäsie, Geodä-tische Bezugsrichtungen, Geographische Kathetenzuschlags-formel, Geoid, Koordinaten, Landesvermessung, Massein-heiten, Massstab, Meridiankonvergenz, mittleres Erdel-lipsoid, Navigation, Projektionsreduktionen, Referenzel-lipsoid, Rotationsellipsoid, Schmiegungskugel, Steigung, Topozentrum, Winkeleinheiten.
Zusammenfassung: In diesem Kapitel soll eine Einführung in die allgemeinen Grundlagen der Geodäsie gegeben wer-den. Ausgehend von einer Standortbestimmung und Beg-riffsbildung der sich heute darstellenden geodätischen Auf-gabenfelder und Genauigkeitsspektren erfolgt eine Übersicht über Referenzsysteme sowie Definitionen geodätisch rele-vanter Mass- und Winkeleinheiten.
1.1 Einleitung
Die Landesvermessung und auch die Bauvermessung sind schon mehrere tausend Jahre alt. So hat man bereits bei den Babyloniern Katasterkarten auf Tontafeln gefunden. Auch beim Bau der Pyramiden sind Messverfahren eingesetzt worden, wie sie noch heute auf Baustellen vorzufinden sind.
Die Begriffe Geometrie und Geodäsie leiten sich vom grie-chischen ab:
γεωµετρω[geometro] = Landesvermessung
γεωδεισια[geodaesia] = Erdvermessung (ursprünglich Landzuteilung)
γη [gae] = Erde
δαιζω [daïzo] = ich teile
Seite 2 1. Grundlagen
Definition der Geodäsie nach F. R. Helmert (1880):
Die Geodäsie ist die Wissenschaft von der Ausmessung und Abbildung der Erdoberfläche 1
Interpretiert man diese Definition, von der immer wieder Gebrauch gemacht wird, mit den Synonymen
Ausmessung = Gewinnung von Beobachtungsgrössen (durch Sensoren) Abbildung = Nutzung von Beobachtungsgrössen = Abbildung (Transformation) von Beo- bachtungsgrössen in (physikalischen) Modellen,
so lässt sich die Definition von Helmert wie folgt modifizie-ren:
Die Geodäsie ist die Wissenschaft von der Gewinnung erdbezogener und objektbezogener Beobachtungsgrössen und ihrer Abbildung in physikalische Modelle 2
Modellbildung, Messung (Beobachtung) und Transformation der Beobachtungsgrössen sind somit die Basisoperationen der Geodäsie. Vor jeder Messung muss der funktionale Zu-sammenhang zwischen Modellen und Beobachtungsgrössen bekannt sein.
Einstein bringt diese Forderung der Geodäsie in Kurzform: Erst die Theorie entscheidet darüber, was man beobach-ten kann. 3
Definition gemäss www.geomatik.ethz.ch:
GEODÄSIE GEOINFORMATIK GEOMATIK - Geomatics - Geomatique - Geomatica so hat es 1969 der französische Photogrammeter Dubuis-son definiert
Geomatik ist die Wissenschaft von der Akquisition, Mo-dellierung, Analyse und Repräsentation raumbezogener Daten und Prozesse unter besonderer Berücksichtigung planerischer, boden- und umweltrelevanter Fragestellun-gen. Die Geomatik spannt somit einen weiten Bogen von den Geowissenschaften über die Ingenieurwissenschaften und Informatik bis hin zu Raumplanung, Landentwicklung und Umweltwissenschaften.
1 aus: Helmert, F.R.[1880]: Die mathematischen und physikali-schen Theorien der höheren Geodä-sie, Verlag Bonn 2 nach: Heitz, S.[1991]: Einführung in dreidimensionalegeometrische Modelle der Geodäsie,Mitteilungen aus den GeodätischenInstituten der Rheinischen Friedrich-Wilhelms-Universität Bonn, Nr. 79 3 aus: Heisenberg, W.[1973]: Der Teil und das Ganze, Gesprächeim Umkreis der Atomphysik, Deut-scher Taschenbuchverlag, München
1.1 Einleitung Seite 3
Einerseits setzt sie sich auseinander mit wissenschaftli-chen Fragen zu Problemen von Prozessen in der Geosphä-re, zum anderen beschäftigt sie sich mit der Erfassung und Überwachung der sich komplex und schnell ändernden menschlichen Umwelt und mit der Planung nachhaltiger Landnutzungssysteme.
Gemäss FIG (1995) Publication No.2, Definition of a Surveyor
Für die Bereiche Beobachtung, Modellbildung und Transformation lässt sich das zeitgemässe Spektrum der Geomatik folgendermassen darstellen:
Die Ermittlung der Grösse und Gestalt der Erde und die Er-fassung aller Daten, die zur Bestimmung der Grösse, der La-ge, der Form und des Umfangs irgendeines Teiles der Erd-oberfläche notwendig sind.
Die Bestimmung der Lage von Grenzen öffentlicher und pri-vater Grundstücke, einschliesslich nationaler oder internatio-naler Grenzen, und die Registrierung dieser Grundstücke bei den zuständigen Behörden.
Die Festlegung von Objekten im Weltraum und die Festle-gung und Überwachung von physikalischen Strukturen und Ingenieurbauwerken über, auf und unter der Erdoberfläche.
Entwurf, Einrichtung und Verwaltung von Land- und geo-graphischen Informationssystemen sowie die Beschaffung, Speicherung, Analyse und Handhabung der Daten in diesen Systemen.
Die Erforschung des natürlichen und sozialen Umfeldes, die Ermittlung von Land- und Seeressourcen und der Gebrauch dieser Daten in der städtischen, ländlichen und regionalen Entwicklungsplanung.
Planung, Entwicklung und Neugestaltung von Eigentum, sei es städtisch oder ländlich, seien es Grundstücke oder Bau-werke.
Wertermittlung und Verwaltung von Eigentum, sei es städ-tisch oder ländlich, seien es Grundstücke oder Bauwerke.
Planung, Vermessung und Organisation von Neuarbeiten, einschliesslich der Kostenvoranschläge.
Herstellung von Karten, Bildschirmdarstellungen, Datenfiles, Tabellen und Protokollen.
FIG: Fédération Internationale des Géomètres
Seite 4 1. Grundlagen
1.2 Einordnung der Geodäsie
Basisgebiete der Geodäsie:
Geodätische Messtechnik (GMT)
Photogrammetrie
Satellitengeodäsie
Mathematische Geodäsie
Physikalische Geodäsie
Geodätische Statistik und Ausgleichungsrechnung
Geoinformatik
Raumplanung (Städtebau, Verkehrsplanung und Wasserwirtschaft)
Bodenordnung und Bodenwirtschaft
Kartographie
Nachbargebiete der Geodäsie:
Angewandte Mathematik
Physik
Statistik
Informatik
Elektronik
Mess- und Regelungstechnik
Meteorologie
Geologie (Morphologie und Bodenkunde)
Geographie
Astronomie
Management
Rechtswissenschaften (im Bereich der Raumplanung, Bo-denwirtschaft und Amtlichen Vermessung)
1.3 Aufgabengebiete und Anwendungsbereiche der Geodäsie Seite 5
1.3 Aufgabengebiete und Anwendungsbereiche der Geodäsie
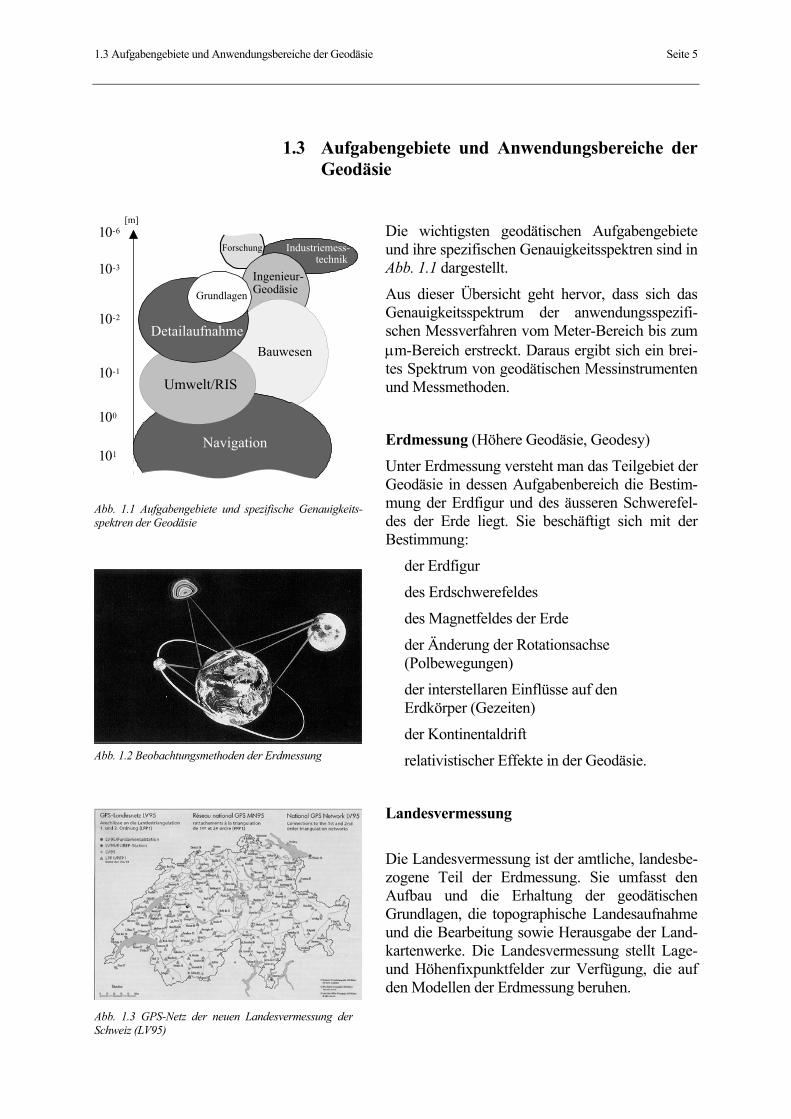
Die wichtigsten geodätischen Aufgabengebiete und ihre spezifischen Genauigkeitsspektren sind in Abb. 1.1 dargestellt.
Aus dieser Übersicht geht hervor, dass sich das Genauigkeitsspektrum der anwendungsspezifi-schen Messverfahren vom Meter-Bereich bis zum µm-Bereich erstreckt. Daraus ergibt sich ein brei-tes Spektrum von geodätischen Messinstrumenten und Messmethoden.
Erdmessung (Höhere Geodäsie, Geodesy)
Unter Erdmessung versteht man das Teilgebiet der Geodäsie in dessen Aufgabenbereich die Bestim-mung der Erdfigur und des äusseren Schwerefel-des der Erde liegt. Sie beschäftigt sich mit der Bestimmung:
der Erdfigur
des Erdschwerefeldes
des Magnetfeldes der Erde
der Änderung der Rotationsachse (Polbewegungen)
der interstellaren Einflüsse auf den Erdkörper (Gezeiten)
der Kontinentaldrift
relativistischer Effekte in der Geodäsie.
Landesvermessung
Die Landesvermessung ist der amtliche, landesbe-zogene Teil der Erdmessung. Sie umfasst den Aufbau und die Erhaltung der geodätischen Grundlagen, die topographische Landesaufnahme und die Bearbeitung sowie Herausgabe der Land-kartenwerke. Die Landesvermessung stellt Lage- und Höhenfixpunktfelder zur Verfügung, die auf den Modellen der Erdmessung beruhen.
[m]10-6
10-2
10-3
10-1
100
101Navigation
Bauwesen
Grundlagen
Ingenieur-Geodäsie
Forschung Industriemess-technik
Detailaufnahme
Umwelt/RIS
Abb. 1.1 Aufgabengebiete und spezifische Genauigkeits-spektren der Geodäsie
Abb. 1.2 Beobachtungsmethoden der Erdmessung
Abb. 1.3 GPS-Netz der neuen Landesvermessung derSchweiz (LV95)
Seite 6 1. Grundlagen
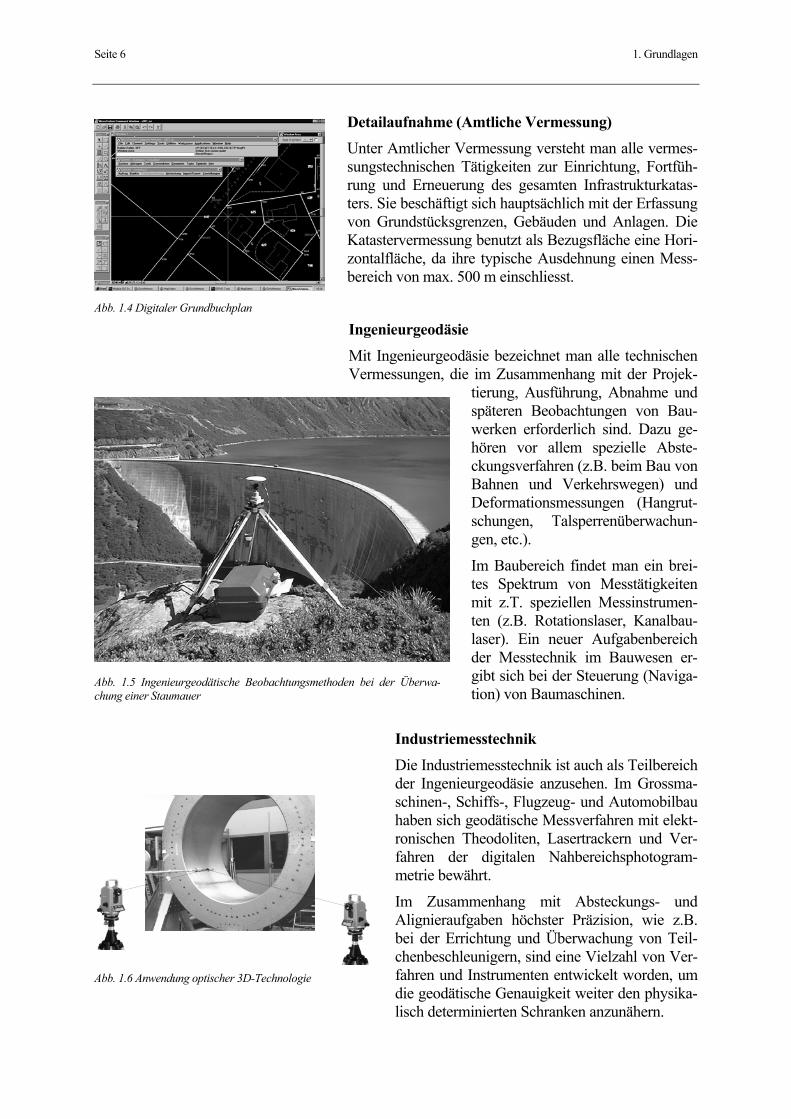
Detailaufnahme (Amtliche Vermessung) Unter Amtlicher Vermessung versteht man alle vermes-sungstechnischen Tätigkeiten zur Einrichtung, Fortfüh-rung und Erneuerung des gesamten Infrastrukturkatas-ters. Sie beschäftigt sich hauptsächlich mit der Erfassung von Grundstücksgrenzen, Gebäuden und Anlagen. Die Katastervermessung benutzt als Bezugsfläche eine Hori-zontalfläche, da ihre typische Ausdehnung einen Mess-bereich von max. 500 m einschliesst.
Ingenieurgeodäsie Mit Ingenieurgeodäsie bezeichnet man alle technischen Vermessungen, die im Zusammenhang mit der Projek-
tierung, Ausführung, Abnahme und späteren Beobachtungen von Bau-werken erforderlich sind. Dazu ge-hören vor allem spezielle Abste-ckungsverfahren (z.B. beim Bau von Bahnen und Verkehrswegen) und Deformationsmessungen (Hangrut-schungen, Talsperrenüberwachun-gen, etc.).
Im Baubereich findet man ein brei-tes Spektrum von Messtätigkeiten mit z.T. speziellen Messinstrumen-ten (z.B. Rotationslaser, Kanalbau-laser). Ein neuer Aufgabenbereich der Messtechnik im Bauwesen er-gibt sich bei der Steuerung (Naviga-tion) von Baumaschinen.
Industriemesstechnik Die Industriemesstechnik ist auch als Teilbereich der Ingenieurgeodäsie anzusehen. Im Grossma-schinen-, Schiffs-, Flugzeug- und Automobilbau haben sich geodätische Messverfahren mit elekt-ronischen Theodoliten, Lasertrackern und Ver-fahren der digitalen Nahbereichsphotogram-metrie bewährt.
Im Zusammenhang mit Absteckungs- und Alignieraufgaben höchster Präzision, wie z.B. bei der Errichtung und Überwachung von Teil-chenbeschleunigern, sind eine Vielzahl von Ver-fahren und Instrumenten entwickelt worden, um die geodätische Genauigkeit weiter den physika-lisch determinierten Schranken anzunähern.
Abb. 1.4 Digitaler Grundbuchplan
Abb. 1.5 Ingenieurgeodätische Beobachtungsmethoden bei der Überwa-chung einer Staumauer
Abb. 1.6 Anwendung optischer 3D-Technologie
1.3 Aufgabengebiete und Anwendungsbereiche der Geodäsie Seite 7
Datenakquisition im Bereich Umwelt/RIS In diesem Bereich stehen Rauminformationssyste-me (RIS) im Zentrum, die Koordinaten als Basisda-ten verwenden. Um einer Vielzahl von akquirierten Daten (z.B. Meteorologie, Luftverschmutzung) ei-nen Raumbezug zu geben, strebt man in der GMT integrierte Lösungen der mobilen Datenerfassung mittels Pencomputing unter der Verwendung geo-dätischer Sensoren (Tachymeter, GPS, EDM) an. Die Verwendung von Pencomputern mit entspre-chender Software bietet den Vorteil, dass Daten be-reits beim Aufnahmevorgang im Feld kontrolliert, strukturiert und gesichert werden.
Navigation Eine Messtechnik, die z.B. in Kombination mit di-gitalen Karten als Unterlage für die Entwicklung von Verkehrsleitsystemen oder Flottenmanage-mentsystemen dient. Als hauptsächliche Messver-fahren werden hier GPS, Inertialsysteme, Magnet-feldsensoren und einfache Wegmesser (Odometer = Zählung der Radumdrehungen) eingesetzt.
Forschung Die Forschung im Bereich der geodätischen Wis-senschaften erstreckt sich über alle oben vorgestell-ten Teilgebiete. Im Bereich der GMT sind dies u.a. die Entwicklung von Präzisionsmessverfahren unter Einbezug von neuen und verfeinerten Modellen sowie die Instrumentenentwicklung.
Einen guten Überblick über die gesamten For-schungstätigkeiten bietet der jährlich erscheinende Forschungsbericht.
Abb. 1.7 Mobile Mapping mittels Pencomputing und One-Man-Station
Abb. 1.8 GPS-gestützte Navigation
Abb. 1.9 Forschungsbericht des Departements Geodätische Wissenschaf-ten der ETH Zürich
Seite 8 1. Grundlagen
1.4 Stellung der GMT im interdisziplinären Kontext
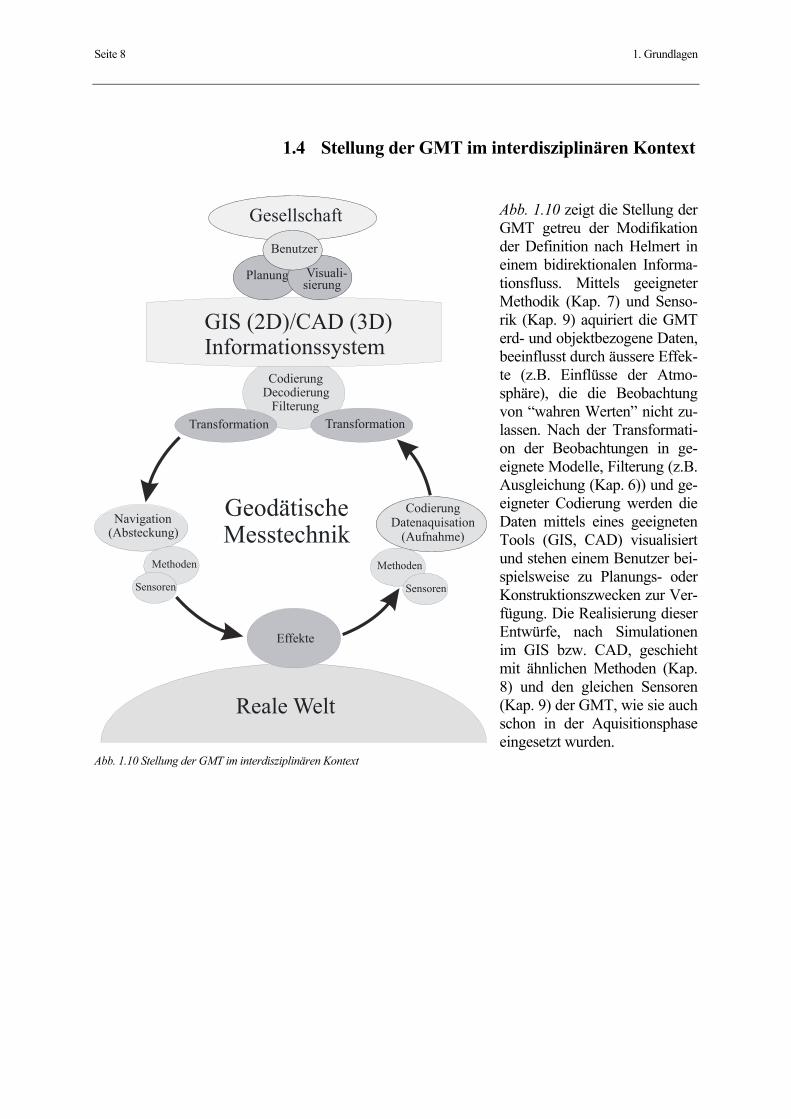
Abb. 1.10 zeigt die Stellung der GMT getreu der Modifikation der Definition nach Helmert in einem bidirektionalen Informa-tionsfluss. Mittels geeigneter Methodik (Kap. 7) und Senso-rik (Kap. 9) aquiriert die GMT erd- und objektbezogene Daten, beeinflusst durch äussere Effek-te (z.B. Einflüsse der Atmo-sphäre), die die Beobachtung von “wahren Werten” nicht zu-lassen. Nach der Transformati-on der Beobachtungen in ge-eignete Modelle, Filterung (z.B. Ausgleichung (Kap. 6)) und ge-eigneter Codierung werden die Daten mittels eines geeigneten Tools (GIS, CAD) visualisiert und stehen einem Benutzer bei-spielsweise zu Planungs- oder Konstruktionszwecken zur Ver-fügung. Die Realisierung dieser Entwürfe, nach Simulationen im GIS bzw. CAD, geschieht mit ähnlichen Methoden (Kap. 8) und den gleichen Sensoren (Kap. 9) der GMT, wie sie auch schon in der Aquisitionsphase eingesetzt wurden.
Abb. 1.10 Stellung der GMT im interdisziplinären Kontext
Gesellschaft
Benutzer
Planung Visuali-sierung
GIS (2D)/CAD (3D)Informationssystem
CodierungDecodierung
FilterungTransformation Transformation
Effekte
Navigation(Absteckung)
CodierungDatenaquisation
(Aufnahme)
Sensoren Sensoren
Methoden Methoden
GeodätischeMesstechnik
Reale Welt

1.5 Arbeitsprinzipien im Bereich der Geodäsie Seite 9
1.5 Arbeitsprinzipien im Bereich der Geodäsie
Ordnungsprinzip Für die Verknüpfung von Messungen, die Fortführung und Verdichtung gilt das Ordnungsprinzip. Hierunter ist das Ar-beiten vom „Grossen ins Kleine“ zu verstehen, nachgeordne-te Messungen werden in ein vorhandenes Netz eingepasst.
Nachbarschaftsprinzip (Homogenität)
Um einem homogenen Aufbau des Messungsliniennetzes Sorge zu tragen, ist zusammen mit dem Ordnungsprinzip auch das Nachbarschaftsprinzip anzuwenden. Es besagt, dass nahe beieinanderliegende Punkte von den gleichen An-schlusspunkten aus zu bestimmen sind. Dies unterbindet weitgehend eine systematisch einseitige Auswirkung von Ungenauigkeiten auf das Messungsliniennetz.
Zuverlässigkeits- und Kontrollprinzip (Qualitätssiche-rung)
Jedes Messelement ist durch unabhängige Kontrollen zu ve-rifizieren. Dies kann beispielsweise die Polaraufnahme eines Neupunktes von einem zweiten Standpunkt aus sein. Eben-falls sind Berechnungen zu verproben. Werden Berechnun-gen mittels Software durchgeführt, so muss die Richtigkeit dieser sichergestellt werden. Selbst autorisierte Software ist gründlichst auszutesten. Dabei sind besonders die theoreti-schen Spezialfälle interessant.
Wirtschaftlichkeitsprinzip
Messung ist nicht Selbstzweck! Den beiden konträren Fak-toren Genauigkeit und Wirtschaftlichkeit wird durch folgen-de, dem Messzweck angepasste Genauigkeitsschranke ent-sprochen:
„So genau wie erforderlich, nicht wie technisch möglich“.
Seite 10 1. Grundlagen
1.6 Geodätische Bezugsflächen
Eine zentrale Problemstellung der Geodäsie, die man auch an Helmerts Definition ablesen kann, ist die Frage nach der Erdgestalt und deren mathematischer Beschreibung. Dabei stehen sich eine möglichst einfache mathematische Be-schreibung und eine möglichst wirklichkeitsgetreue Be-schreibung diametral gegenüber.
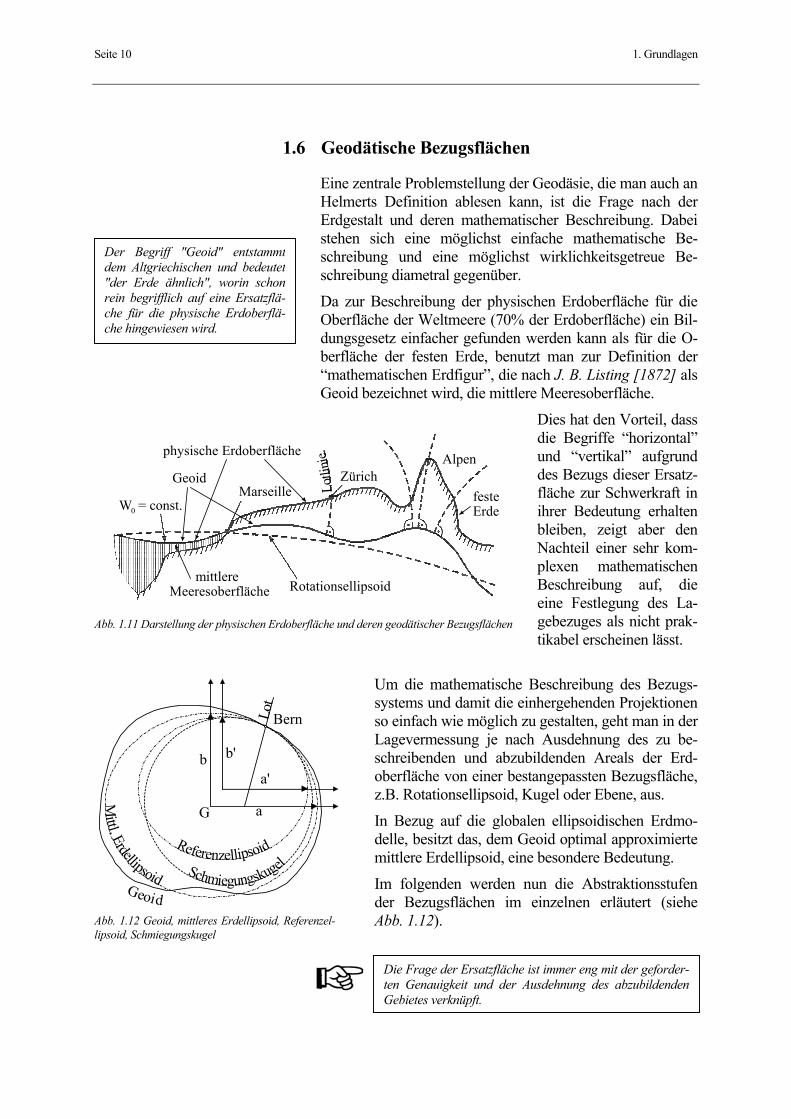
Da zur Beschreibung der physischen Erdoberfläche für die Oberfläche der Weltmeere (70% der Erdoberfläche) ein Bil-dungsgesetz einfacher gefunden werden kann als für die O-berfläche der festen Erde, benutzt man zur Definition der “mathematischen Erdfigur”, die nach J. B. Listing [1872] als Geoid bezeichnet wird, die mittlere Meeresoberfläche.
Dies hat den Vorteil, dass die Begriffe “horizontal” und “vertikal” aufgrund des Bezugs dieser Ersatz-fläche zur Schwerkraft in ihrer Bedeutung erhalten bleiben, zeigt aber den Nachteil einer sehr kom-plexen mathematischen Beschreibung auf, die eine Festlegung des La-gebezuges als nicht prak-tikabel erscheinen lässt.
Um die mathematische Beschreibung des Bezugs-systems und damit die einhergehenden Projektionen so einfach wie möglich zu gestalten, geht man in der Lagevermessung je nach Ausdehnung des zu be-schreibenden und abzubildenden Areals der Erd-oberfläche von einer bestangepassten Bezugsfläche, z.B. Rotationsellipsoid, Kugel oder Ebene, aus.
In Bezug auf die globalen ellipsoidischen Erdmo-delle, besitzt das, dem Geoid optimal approximierte mittlere Erdellipsoid, eine besondere Bedeutung.
Im folgenden werden nun die Abstraktionsstufen der Bezugsflächen im einzelnen erläutert (siehe Abb. 1.12).
.
Abb. 1.12 Geoid, mittleres Erdellipsoid, Referenzel-lipsoid, Schmiegungskugel
Der Begriff "Geoid" entstammtdem Altgriechischen und bedeutet"der Erde ähnlich", worin schonrein begrifflich auf eine Ersatzflä-che für die physische Erdoberflä-che hingewiesen wird.
Rotationsellipsoidmittlere
Meeresoberfläche
W0 = const.Marseille
ZürichAlpen
Geoid
physische Erdoberfläche
festeErde
Lotli
nie
Abb. 1.11 Darstellung der physischen Erdoberfläche und deren geodätischer Bezugsflächen
Bern
a
ba'
b'
G
Lot
ReferenzellipsoidSchmiegungskugel
Mittl. Erdellipsoid
Geoid
Die Frage der Ersatzfläche ist immer eng mit der geforder-ten Genauigkeit und der Ausdehnung des abzubildendenGebietes verknüpft.
1.6 Geodätische Bezugsflächen Seite 11
1.6.1 Das Geoid
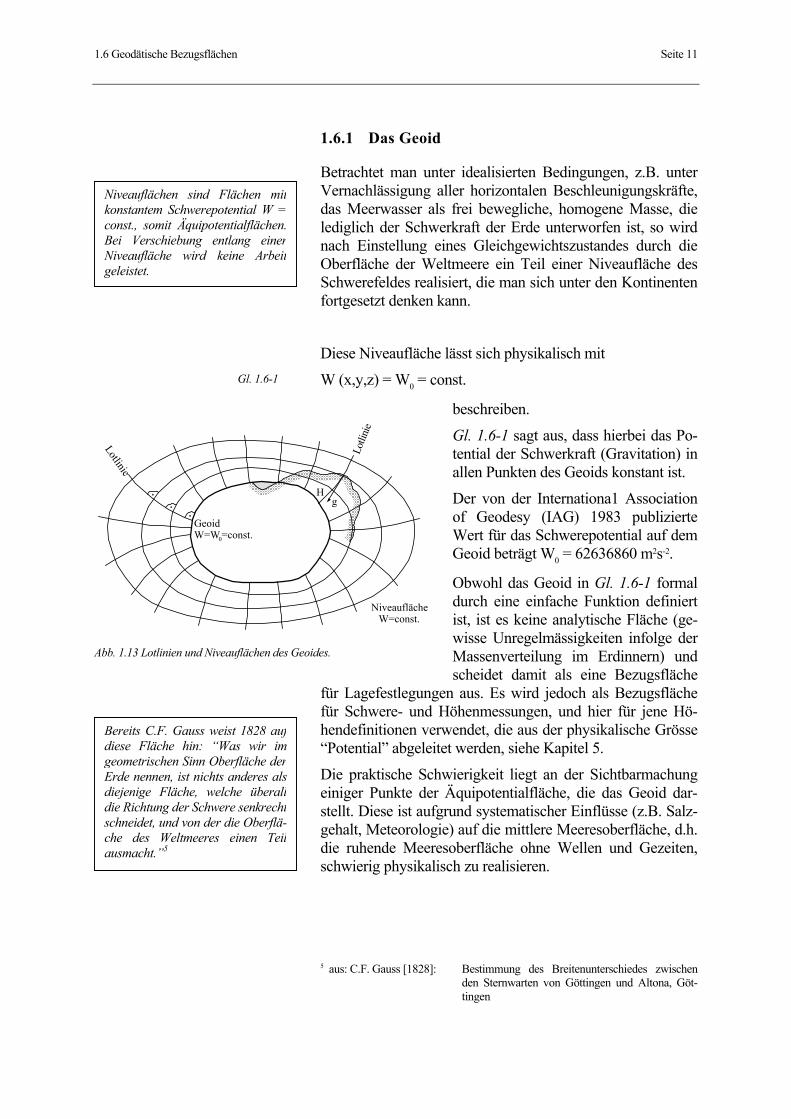
Betrachtet man unter idealisierten Bedingungen, z.B. unter Vernachlässigung aller horizontalen Beschleunigungskräfte, das Meerwasser als frei bewegliche, homogene Masse, die lediglich der Schwerkraft der Erde unterworfen ist, so wird nach Einstellung eines Gleichgewichtszustandes durch die Oberfläche der Weltmeere ein Teil einer Niveaufläche des Schwerefeldes realisiert, die man sich unter den Kontinenten fortgesetzt denken kann.
Diese Niveaufläche lässt sich physikalisch mit
W (x,y,z) = W0 = const.
beschreiben.
Gl. 1.6-1 sagt aus, dass hierbei das Po-tential der Schwerkraft (Gravitation) in allen Punkten des Geoids konstant ist.
Der von der Internationa1 Association of Geodesy (IAG) 1983 publizierte Wert für das Schwerepotential auf dem Geoid beträgt W0 = 62636860 m2s-2.
Obwohl das Geoid in Gl. 1.6-1 formal durch eine einfache Funktion definiert ist, ist es keine analytische Fläche (ge-wisse Unregelmässigkeiten infolge der Massenverteilung im Erdinnern) und scheidet damit als eine Bezugsfläche
für Lagefestlegungen aus. Es wird jedoch als Bezugsfläche für Schwere- und Höhenmessungen, und hier für jene Hö-hendefinitionen verwendet, die aus der physikalische Grösse “Potential” abgeleitet werden, siehe Kapitel 5.
Die praktische Schwierigkeit liegt an der Sichtbarmachung einiger Punkte der Äquipotentialfläche, die das Geoid dar-stellt. Diese ist aufgrund systematischer Einflüsse (z.B. Salz-gehalt, Meteorologie) auf die mittlere Meeresoberfläche, d.h. die ruhende Meeresoberfläche ohne Wellen und Gezeiten, schwierig physikalisch zu realisieren.
5 aus: C.F. Gauss [1828]: Bestimmung des Breitenunterschiedes zwischen
den Sternwarten von Göttingen und Altona, Göt-tingen
Niveauflächen sind Flächen mitkonstantem Schwerepotential W =const., somit Äquipotentialflächen.Bei Verschiebung entlang einerNiveaufläche wird keine Arbeitgeleistet.
Gl. 1.6-1
GeoidW=W0=const.
NiveauflächeW=const.
Lotli
nie
Hg
LotlinieAbb. 1.13 Lotlinien und Niveauflächen des Geoides.
Bereits C.F. Gauss weist 1828 aufdiese Fläche hin: “Was wir imgeometrischen Sinn Oberfläche derErde nennen, ist nichts anderes alsdiejenige Fläche, welche überalldie Richtung der Schwere senkrechtschneidet, und von der die Oberflä-che des Weltmeeres einen Teilausmacht.”5
Seite 12 1. Grundlagen
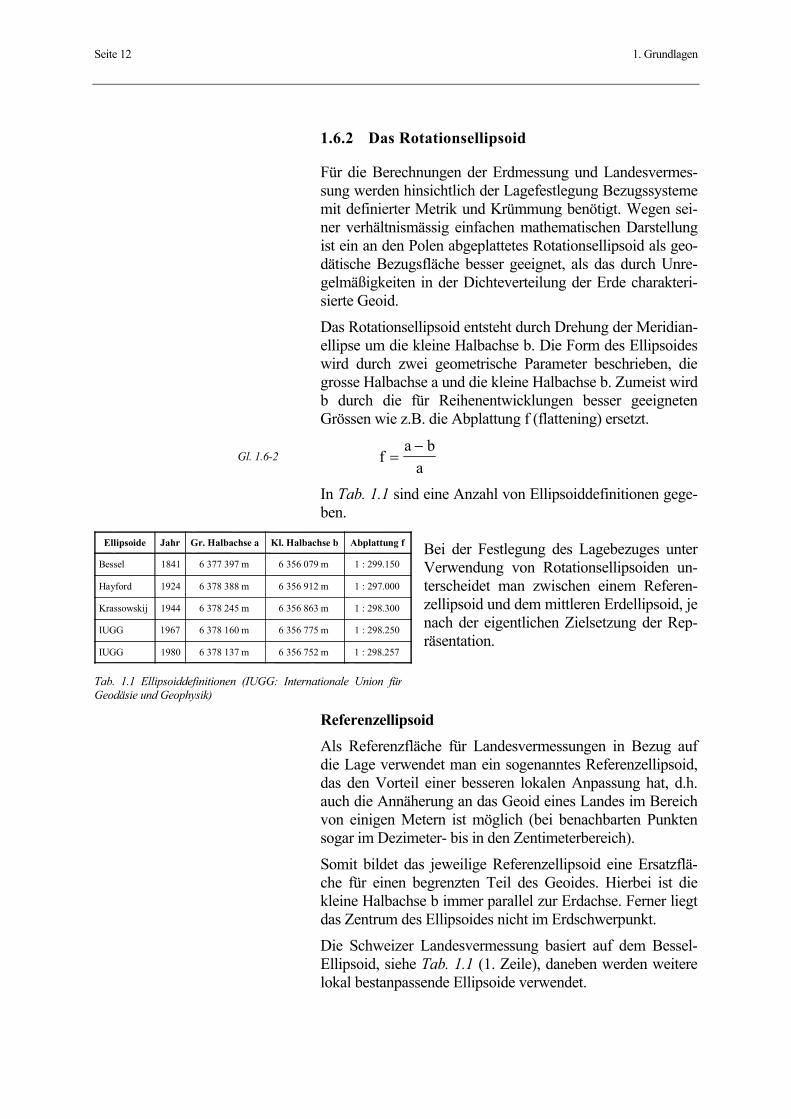
1.6.2 Das Rotationsellipsoid
Für die Berechnungen der Erdmessung und Landesvermes-sung werden hinsichtlich der Lagefestlegung Bezugssysteme mit definierter Metrik und Krümmung benötigt. Wegen sei-ner verhältnismässig einfachen mathematischen Darstellung ist ein an den Polen abgeplattetes Rotationsellipsoid als geo-dätische Bezugsfläche besser geeignet, als das durch Unre-gelmäßigkeiten in der Dichteverteilung der Erde charakteri-sierte Geoid.
Das Rotationsellipsoid entsteht durch Drehung der Meridian-ellipse um die kleine Halbachse b. Die Form des Ellipsoides wird durch zwei geometrische Parameter beschrieben, die grosse Halbachse a und die kleine Halbachse b. Zumeist wird b durch die für Reihenentwicklungen besser geeigneten Grössen wie z.B. die Abplattung f (flattening) ersetzt.
f
a ba
=−
In Tab. 1.1 sind eine Anzahl von Ellipsoiddefinitionen gege-ben.
Bei der Festlegung des Lagebezuges unter Verwendung von Rotationsellipsoiden un-terscheidet man zwischen einem Referen-zellipsoid und dem mittleren Erdellipsoid, je nach der eigentlichen Zielsetzung der Rep-räsentation.
Referenzellipsoid Als Referenzfläche für Landesvermessungen in Bezug auf die Lage verwendet man ein sogenanntes Referenzellipsoid, das den Vorteil einer besseren lokalen Anpassung hat, d.h. auch die Annäherung an das Geoid eines Landes im Bereich von einigen Metern ist möglich (bei benachbarten Punkten sogar im Dezimeter- bis in den Zentimeterbereich).
Somit bildet das jeweilige Referenzellipsoid eine Ersatzflä-che für einen begrenzten Teil des Geoides. Hierbei ist die kleine Halbachse b immer parallel zur Erdachse. Ferner liegt das Zentrum des Ellipsoides nicht im Erdschwerpunkt.
Die Schweizer Landesvermessung basiert auf dem Bessel-Ellipsoid, siehe Tab. 1.1 (1. Zeile), daneben werden weitere lokal bestanpassende Ellipsoide verwendet.
Tab. 1.1 Ellipsoiddefinitionen (IUGG: Internationale Union fürGeodäsie und Geophysik)
Gl. 1.6-2
Ellipsoide Jahr Gr. Halbachse a Kl. Halbachse b Abplattung f
Bessel 1841 6 377 397 m 6 356 079 m 1 : 299.150
Hayford 1924 6 378 388 m 6 356 912 m 1 : 297.000
Krassowskij 1944 6 378 245 m 6 356 863 m 1 : 298.300
IUGG 1967 6 378 160 m 6 356 775 m 1 : 298.250
IUGG 1980 6 378 137 m 6 356 752 m 1 : 298.257

1.6 Geodätische Bezugsflächen Seite 13
Mittleres Erdellipsoid Ist global eine optimale Approximation an das Geoid und somit eine Ersatzfläche für die gesamte Erde gesucht, so be-dient man sich eines mittleren Erdellipsoides. Der Nullpunkt befindet sich hierbei im Geozentrum, die Rotationsachse, d.h. die kleine Halbachse b, ist identisch mit der Erdachse. Mit der Minimumsbedingung ΣN2 = Min. kann somit eine Annäherung an ein globales Geoid besser als 100 m erreicht werden.
1.6.3 Die Schmiegungskugel (Gauss'sche Schmiegungskugel)
Die Schmiegungskugel ist eine lokale Annäherung an das Rotationsellipsoid. Sie kann dieses als Bezugsfläche er-setzen, falls die Ausdehnung gering ist. Die schweizeri-sche Landesvermessung kommt mit einer Gauss'schen Schmiegungskugel aus, deren Radius sich mit dem Meri-dian- und Querkrümmungsradius, ausgehend vom Bessel-Ellipsoid, berechnen lässt (siehe Abb. 1.14). R R R
Meridiankrümmungsradiusb
aw
R Querkrümmungsradiusaw
M N
N
= ⋅ =
= =
= =
6'378'815.90 m
RM
2
3
mit a = 6'377'397.16 m, b = 6'356'078.96 m (Tab. 1.1)
w Ba
a B b B( ) cos sin= +1 2 2 2 2
(B: Geographische Breite von Bern)
1.6.4 Die Ebene als Bezugsfläche
Die Ebene ist als Bezugsfläche für Lagebestimmung geeig-net, wenn die Entfernung vom Mittelpunkt (=Be-rührungspunkt der Tangentialebene an die Kugel) weniger als 5 km beträgt.
Der Höhenunterschied zwischendem Ellipsoid und dem Geoidwird als Geoidundulation Nbezeichnet, siehe Abb. 5.6.
Abb. 1.14 Die Projektion der SchweizerischenLandeskarte erfolgt in zwei Schritten: vomEllipsoid auf die Kugel und von der Kugel aufdie geneigte Zylinderoberfläche
EllipsoidKugel
Zylinder
Seite 14 1. Grundlagen
1.7 Geodätische Koordinatensysteme
Die Lage eines Punktes auf einer Fläche lässt sich durch ein geordnetes Zahlenpaar, Koordinaten genannt, darstellen. Die Koordinaten sind jeweils auf die, für die Lagevermessungen, mathematisch-geometrisch definierten Ersatzflächen der Erd-oberfläche bezogen (vgl. Abb. 1.15). Ihre numerischen Werte werden entweder als zwei Winkel, zwei Längenmasse oder einer Kombination aus Winkel und Längenmass angegeben.
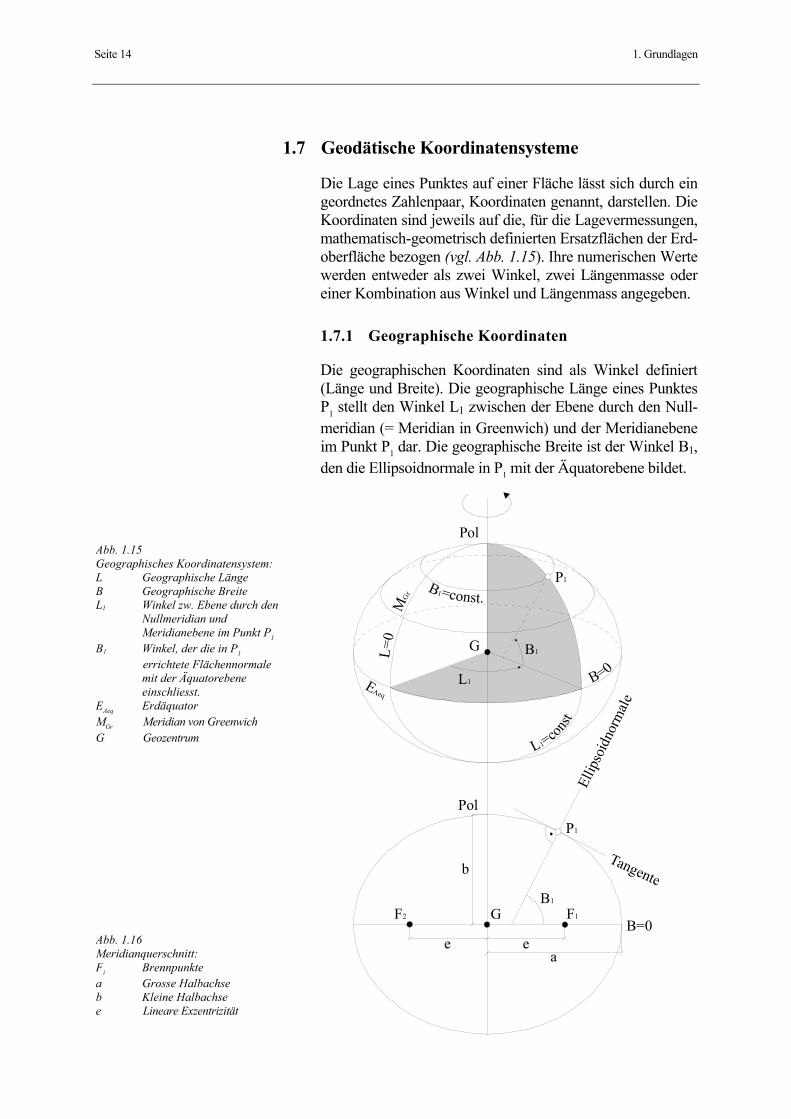
1.7.1 Geographische Koordinaten
Die geographischen Koordinaten sind als Winkel definiert (Länge und Breite). Die geographische Länge eines Punktes P1 stellt den Winkel L1 zwischen der Ebene durch den Null-meridian (= Meridian in Greenwich) und der Meridianebene im Punkt P1 dar. Die geographische Breite ist der Winkel B1, den die Ellipsoidnormale in P1 mit der Äquatorebene bildet.
Abb. 1.15 Geographisches Koordinatensystem: L Geographische Länge B Geographische Breite L1 Winkel zw. Ebene durch den Nullmeridian und Meridianebene im Punkt P1 B1 Winkel, der die in P1 errichtete Flächennormale mit der Äquatorebene einschliesst. EAeq Erdäquator MGr Meridian von Greenwich G Geozentrum
Abb. 1.16 Meridianquerschnitt: Fi Brennpunkte a Grosse Halbachse b Kleine Halbachse e Lineare Exzentrizität
Pol
Pol
EAeq
P1
G
B1=const.
B1
L1 B=0
L1=const
L=0
M
Gr
B1
F1F2
eea
b
GB=0
Ellip
soid
norm
ale
Tangente
P1
1.7 Geodätische Koordinatensysteme Seite 15
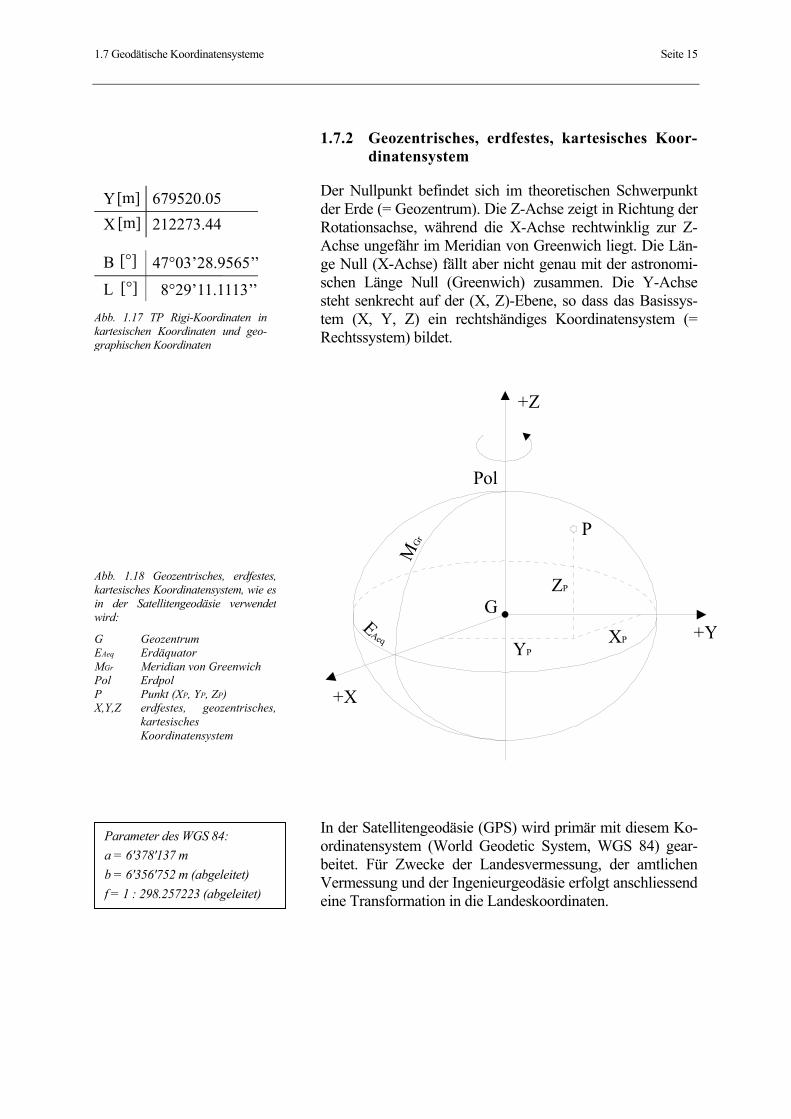
1.7.2 Geozentrisches, erdfestes, kartesisches Koor-dinatensystem
Der Nullpunkt befindet sich im theoretischen Schwerpunkt der Erde (= Geozentrum). Die Z-Achse zeigt in Richtung der Rotationsachse, während die X-Achse rechtwinklig zur Z-Achse ungefähr im Meridian von Greenwich liegt. Die Län-ge Null (X-Achse) fällt aber nicht genau mit der astronomi-schen Länge Null (Greenwich) zusammen. Die Y-Achse steht senkrecht auf der (X, Z)-Ebene, so dass das Basissys-tem (X, Y, Z) ein rechtshändiges Koordinatensystem (= Rechtssystem) bildet.
In der Satellitengeodäsie (GPS) wird primär mit diesem Ko-ordinatensystem (World Geodetic System, WGS 84) gear-beitet. Für Zwecke der Landesvermessung, der amtlichen Vermessung und der Ingenieurgeodäsie erfolgt anschliessend eine Transformation in die Landeskoordinaten.
Pol
EAeq
P
G
YPXP
ZP
+X
+Y
+ZM
Gr
Abb. 1.17 TP Rigi-Koordinaten inkartesischen Koordinaten und geo-graphischen Koordinaten
Abb. 1.18 Geozentrisches, erdfestes,kartesisches Koordinatensystem, wie esin der Satellitengeodäsie verwendetwird:
G Geozentrum EAeq Erdäquator MGr Meridian von Greenwich Pol Erdpol P Punkt (XP, YP, ZP) X,Y,Z erdfestes, geozentrisches, kartesisches Koordinatensystem
Parameter des WGS 84: a = 6'378'137 m b = 6'356'752 m (abgeleitet) f = 1 : 298.257223 (abgeleitet)
YX
B
L
679520.05 [m]212273.44 [m]
[°]
[°] 47°03’28.9565’’
8°29’11.1113’’
Seite 16 1. Grundlagen
1.8 Ebene, kartesische Koordinatensysteme
Um die Flächenkoordinaten einer gekrümmten Fläche, wie sie durch das Rotationsellipsoid oder die Schmiegungskugel dargestellt werden, als ebene kartesische Koordinaten abbil-den zu können, bedarf es einer geodätischen Projektion. Bei geometrischen Projektionen entstehen immer Verzerrungen. Man unterscheidet Längen-, Winkel- und Flächenverzerrun-gen. Für Landesvermessungen sind winkeltreue (konforme) Abbildungen zweckmässiger als andere, da in der Regel auf der Erdoberfläche gemessene Winkel unverändert in die Rechnung eingeführt werden können.
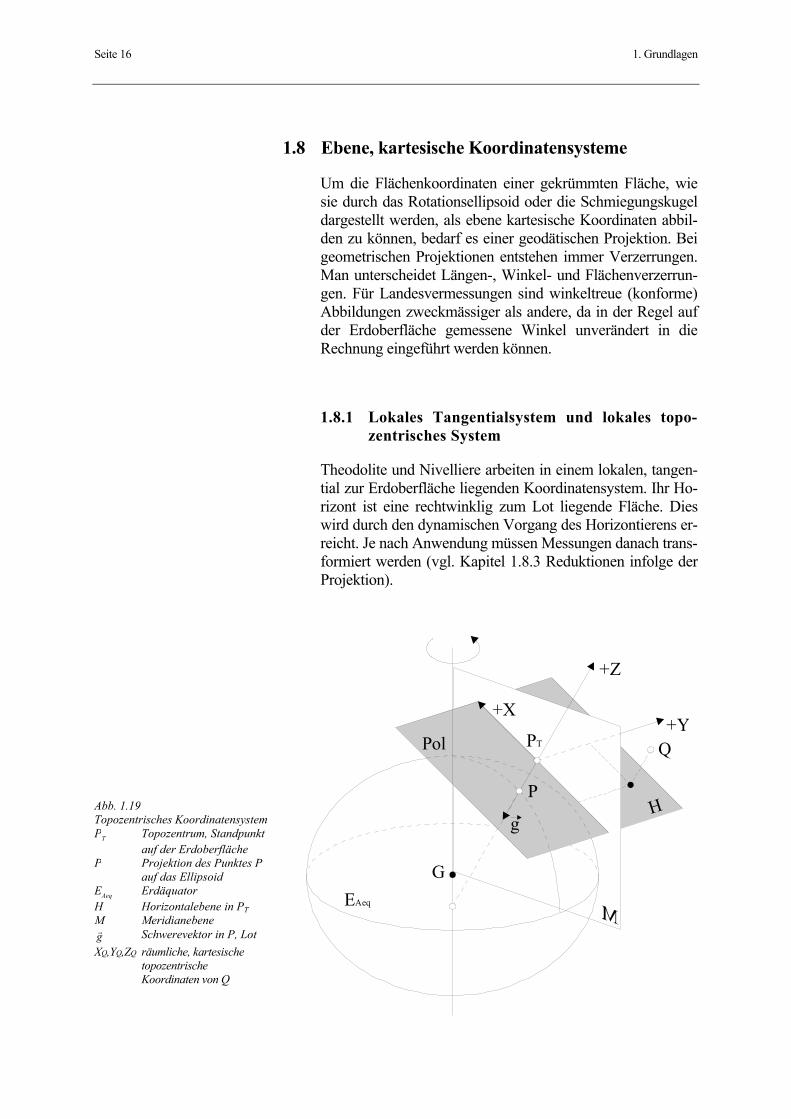
1.8.1 Lokales Tangentialsystem und lokales topo-zentrisches System
Theodolite und Nivelliere arbeiten in einem lokalen, tangen-tial zur Erdoberfläche liegenden Koordinatensystem. Ihr Ho-rizont ist eine rechtwinklig zum Lot liegende Fläche. Dies wird durch den dynamischen Vorgang des Horizontierens er-reicht. Je nach Anwendung müssen Messungen danach trans-formiert werden (vgl. Kapitel 1.8.3 Reduktionen infolge der Projektion).
Pol
EAeq
+Z
+Y+X
PT Q
P
G
Hg
Abb. 1.19 Topozentrisches Koordinatensystem PT Topozentrum, Standpunkt auf der Erdoberfläche P Projektion des Punktes P auf das Ellipsoid EAeq Erdäquator H Horizontalebene in PT M Meridianebene gr Schwerevektor in P, Lot XQ,YQ,ZQ räumliche, kartesische topozentrische Koordinaten von Q
1.8 Ebene, kartesische Koordinatensysteme Seite 17
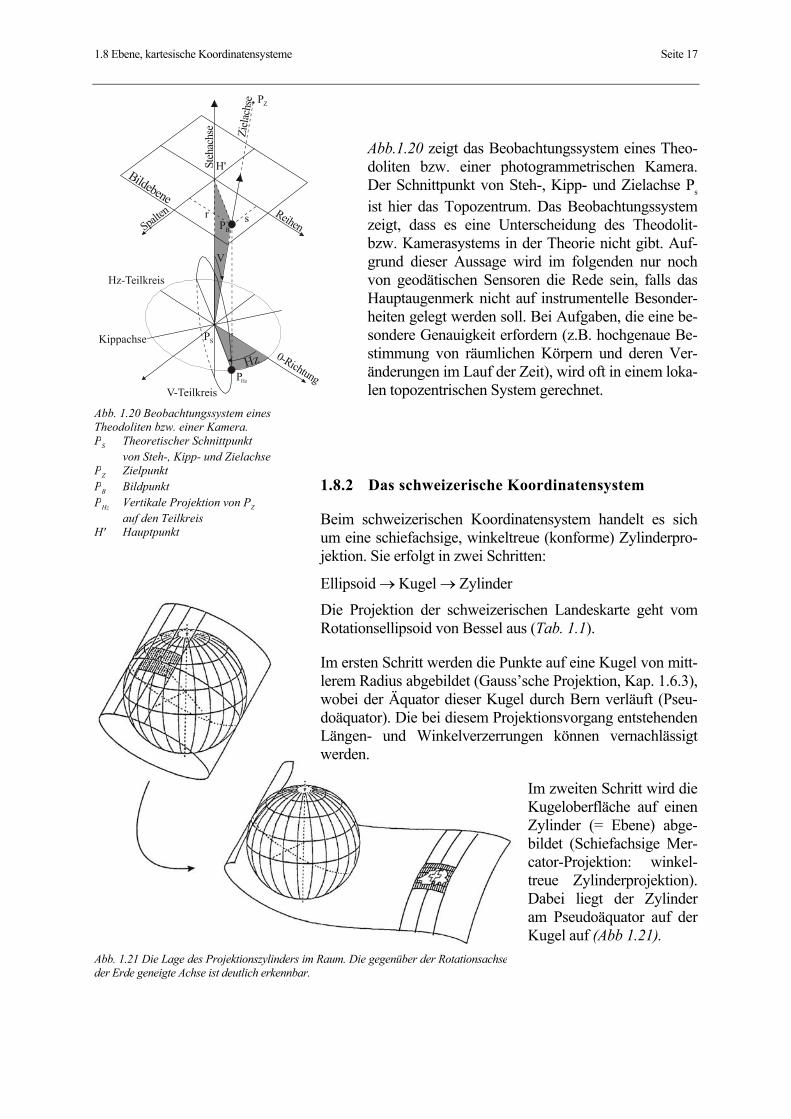
Abb.1.20 zeigt das Beobachtungssystem eines Theo-doliten bzw. einer photogrammetrischen Kamera. Der Schnittpunkt von Steh-, Kipp- und Zielachse Ps ist hier das Topozentrum. Das Beobachtungssystem zeigt, dass es eine Unterscheidung des Theodolit- bzw. Kamerasystems in der Theorie nicht gibt. Auf-grund dieser Aussage wird im folgenden nur noch von geodätischen Sensoren die Rede sein, falls das Hauptaugenmerk nicht auf instrumentelle Besonder-heiten gelegt werden soll. Bei Aufgaben, die eine be-sondere Genauigkeit erfordern (z.B. hochgenaue Be-stimmung von räumlichen Körpern und deren Ver-änderungen im Lauf der Zeit), wird oft in einem loka-len topozentrischen System gerechnet.
1.8.2 Das schweizerische Koordinatensystem
Beim schweizerischen Koordinatensystem handelt es sich um eine schiefachsige, winkeltreue (konforme) Zylinderpro-jektion. Sie erfolgt in zwei Schritten:
Ellipsoid → Kugel → Zylinder
Die Projektion der schweizerischen Landeskarte geht vom Rotationsellipsoid von Bessel aus (Tab. 1.1).
Im ersten Schritt werden die Punkte auf eine Kugel von mitt-lerem Radius abgebildet (Gauss’sche Projektion, Kap. 1.6.3), wobei der Äquator dieser Kugel durch Bern verläuft (Pseu-doäquator). Die bei diesem Projektionsvorgang entstehenden Längen- und Winkelverzerrungen können vernachlässigt werden.
Im zweiten Schritt wird die Kugeloberfläche auf einen Zylinder (= Ebene) abge-bildet (Schiefachsige Mer-cator-Projektion: winkel-treue Zylinderprojektion). Dabei liegt der Zylinder am Pseudoäquator auf der Kugel auf (Abb 1.21).
Abb. 1.20 Beobachtungssystem eines Theodoliten bzw. einer Kamera. PS Theoretischer Schnittpunkt von Steh-, Kipp- und Zielachse PZ Zielpunkt PB Bildpunkt PHz Vertikale Projektion von PZ auf den Teilkreis H' Hauptpunkt
Abb. 1.21 Die Lage des Projektionszylinders im Raum. Die gegenüber der Rotationsachseder Erde geneigte Achse ist deutlich erkennbar.
Steh
achs
e Ziel
achs
e
H'
r s ReihenSpalten
Bildebene
Hz-Teilkreis
PS
0-Richtung
V
PZ
PB
PV-Teilkreis
Kippachse
HzHz
Seite 18 1. Grundlagen
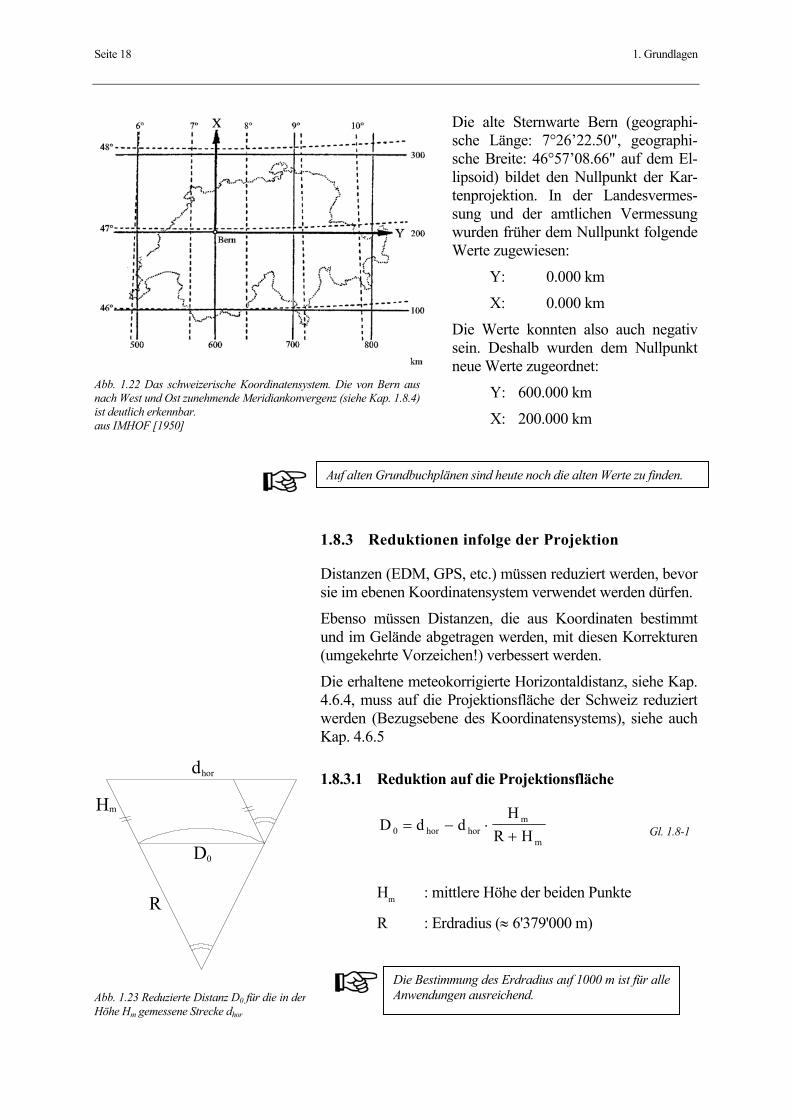
Die alte Sternwarte Bern (geographi-sche Länge: 7°26’22.50", geographi-sche Breite: 46°57’08.66" auf dem El-lipsoid) bildet den Nullpunkt der Kar-tenprojektion. In der Landesvermes-sung und der amtlichen Vermessung wurden früher dem Nullpunkt folgende Werte zugewiesen:
Y: 0.000 km
X: 0.000 km
Die Werte konnten also auch negativ sein. Deshalb wurden dem Nullpunkt neue Werte zugeordnet:
Y: 600.000 km
X: 200.000 km
1.8.3 Reduktionen infolge der Projektion
Distanzen (EDM, GPS, etc.) müssen reduziert werden, bevor sie im ebenen Koordinatensystem verwendet werden dürfen.
Ebenso müssen Distanzen, die aus Koordinaten bestimmt und im Gelände abgetragen werden, mit diesen Korrekturen (umgekehrte Vorzeichen!) verbessert werden.
Die erhaltene meteokorrigierte Horizontaldistanz, siehe Kap. 4.6.4, muss auf die Projektionsfläche der Schweiz reduziert werden (Bezugsebene des Koordinatensystems), siehe auch Kap. 4.6.5
1.8.3.1 Reduktion auf die Projektionsfläche
D d d
HR Hhor hor
m
m0 = − ⋅
+
Hm : mittlere Höhe der beiden Punkte
R : Erdradius (≈ 6'379'000 m)
Abb. 1.22 Das schweizerische Koordinatensystem. Die von Bern ausnach West und Ost zunehmende Meridiankonvergenz (siehe Kap. 1.8.4)ist deutlich erkennbar. aus IMHOF [1950]
Auf alten Grundbuchplänen sind heute noch die alten Werte zu finden.
Gl. 1.8-1
Die Bestimmung des Erdradius auf 1000 m ist für alleAnwendungen ausreichend.
D0
dhor
Hm
R
Abb. 1.23 Reduzierte Distanz D0 für die in derHöhe Hm gemessene Strecke dhor
1.8 Ebene, kartesische Koordinatensysteme Seite 19
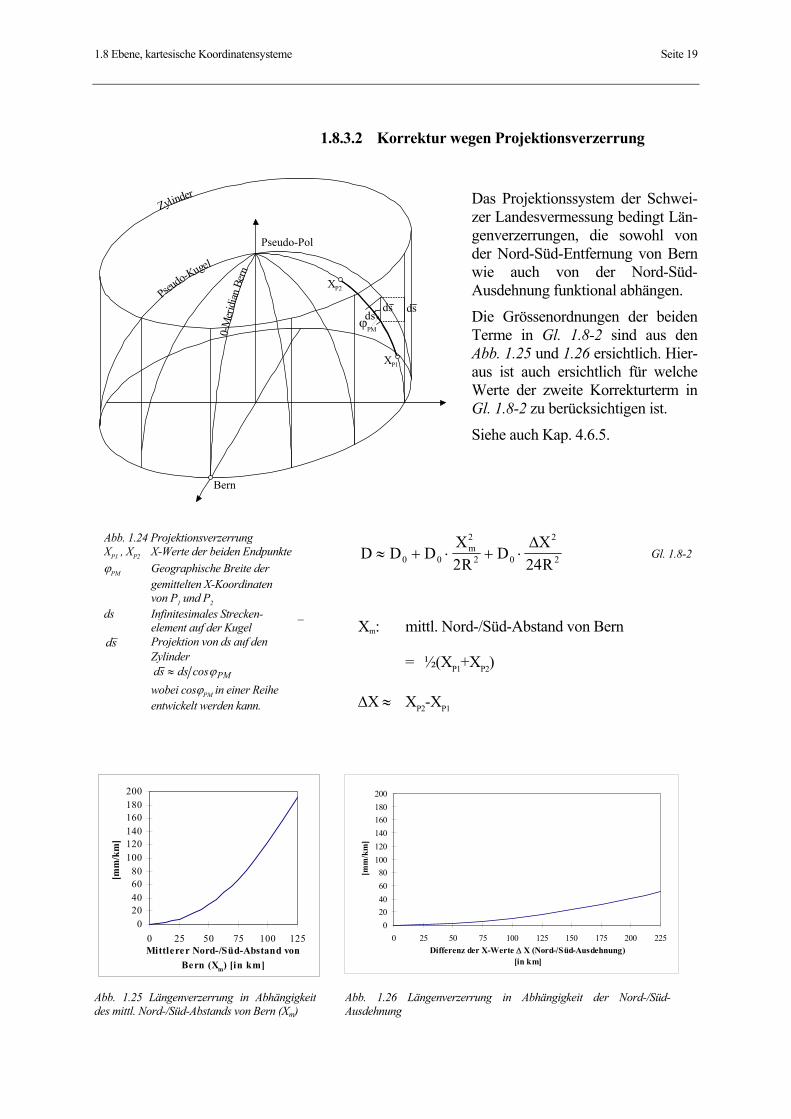
1.8.3.2 Korrektur wegen Projektionsverzerrung
Das Projektionssystem der Schwei-zer Landesvermessung bedingt Län-genverzerrungen, die sowohl von der Nord-Süd-Entfernung von Bern wie auch von der Nord-Süd-Ausdehnung funktional abhängen.
Die Grössenordnungen der beiden Terme in Gl. 1.8-2 sind aus den Abb. 1.25 und 1.26 ersichtlich. Hier-aus ist auch ersichtlich für welche Werte der zweite Korrekturterm in Gl. 1.8-2 zu berücksichtigen ist.
Siehe auch Kap. 4.6.5.
D D DXR
DXR
m≈ + ⋅ + ⋅0 0
2
2 0
2
22 24∆
Xm: mittl. Nord-/Süd-Abstand von Bern
= ½(XP1+XP2)
∆X ≈ XP2-XP1
ds
Bern
Pseudo-Pol
Pseudo-K
ugel
0-M
erid
ian B
ern
Zylinder
XP2
XP1
ϕPM
ds ds
Abb. 1.24 Projektionsverzerrung XP1 , XP2 X-Werte der beiden Endpunkte ϕPM Geographische Breite der gemittelten X-Koordinaten von P1 und P2 ds Infinitesimales Strecken- _ element auf der Kugel
sd Projektion von ds auf den Zylinder
ds ds PM≈ cosϕ wobei cosϕPM in einer Reihe entwickelt werden kann.
Abb. 1.25 Längenverzerrung in Abhängigkeitdes mittl. Nord-/Süd-Abstands von Bern (Xm)
020406080
100120140160180200
0 25 50 75 100 125 150 175 200 225Differenz der X-Werte ∆ X (Nord-/Süd-Ausdehnung)
[in km]
[mm
/km
]
Abb. 1.26 Längenverzerrung in Abhängigkeit der Nord-/Süd-Ausdehnung
Gl. 1.8-2
020406080
100120140160180200
0 25 50 75 100 125Mittlerer Nord-/Süd-Abstand von
Bern (Xm) [in km]
[mm
/km
]
Seite 20 1. Grundlagen
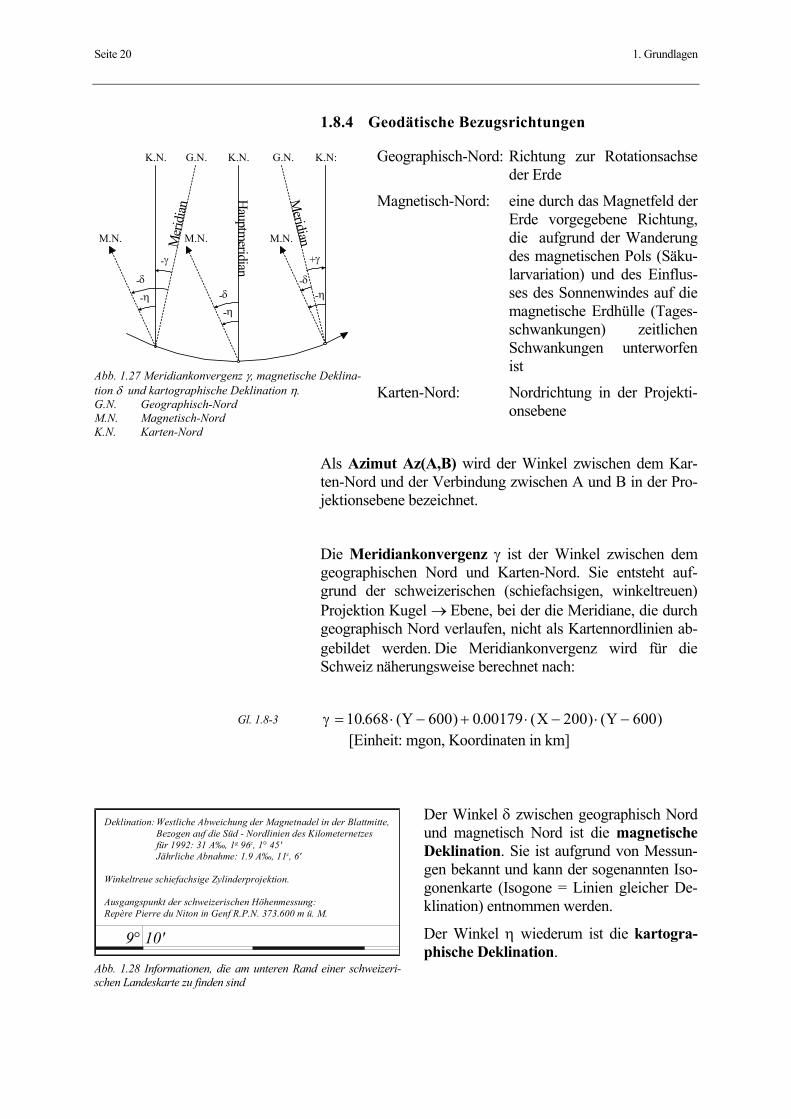
1.8.4 Geodätische Bezugsrichtungen
Geographisch-Nord: Richtung zur Rotationsachse der Erde
Magnetisch-Nord: eine durch das Magnetfeld der Erde vorgegebene Richtung, die aufgrund der Wanderung des magnetischen Pols (Säku-larvariation) und des Einflus-ses des Sonnenwindes auf die magnetische Erdhülle (Tages-schwankungen) zeitlichen Schwankungen unterworfen ist
Karten-Nord: Nordrichtung in der Projekti-onsebene
Als Azimut Az(A,B) wird der Winkel zwischen dem Kar-ten-Nord und der Verbindung zwischen A und B in der Pro-jektionsebene bezeichnet.
Die Meridiankonvergenz γ ist der Winkel zwischen dem geographischen Nord und Karten-Nord. Sie entsteht auf-grund der schweizerischen (schiefachsigen, winkeltreuen) Projektion Kugel → Ebene, bei der die Meridiane, die durch geographisch Nord verlaufen, nicht als Kartennordlinien ab-gebildet werden. Die Meridiankonvergenz wird für die Schweiz näherungsweise berechnet nach:
γ = ⋅ − + ⋅ − ⋅ −10 668 600 0 00179 200 600. ( ) . ( ) ( )Y X Y [Einheit: mgon, Koordinaten in km]
Der Winkel δ zwischen geographisch Nord und magnetisch Nord ist die magnetische Deklination. Sie ist aufgrund von Messun-gen bekannt und kann der sogenannten Iso-gonenkarte (Isogone = Linien gleicher De-klination) entnommen werden.
Der Winkel η wiederum ist die kartogra-phische Deklination.
Hauptm
eridian
Mer
idian
Meridian
-δ
-η
-δ
-η-δ
-η
+γ-γ
K.N. K.N. K.N:G.N. G.N.
M.N. M.N. M.N.
Abb. 1.27 Meridiankonvergenz γ, magnetische Deklina-tion δ und kartographische Deklination η. G.N. Geographisch-Nord M.N. Magnetisch-Nord K.N. Karten-Nord
Gl. 1.8-3
Abb. 1.28 Informationen, die am unteren Rand einer schweizeri-schen Landeskarte zu finden sind
Deklination: Westliche Abweichung der Magnetnadel in der Blattmitte , Bezogen auf die Süd - Nordlinien des Kilometernetzes für 1992: 31 A‰, 1g 96c, 1° 45' Jährliche Abnahme: 1.9 A‰, 11c, 6'
Winkeltreue schiefachsige Zylinderprojektion.
Ausgangspunkt der schweizerischen Höhenmessung:Repère Pierre du Niton in Genf R.P.N. 373.600 m ü. M.
9° 10'
1.9 Masseinheiten und Massverhältnisse in der GMT Seite 21
1.9 Masseinheiten und Massverhältnisse in der GMT
1.9.1 Aktuelle Definitionen von Länge und Zeit
Seit 1967 beruht die Zeitdefinition im Internationalen Einheitensystem (SI) auf der durch Caesium-Atomuhren er-zeugbaren Sekunde (= 1 s);
1 Sekunde ist das 9’192’631’770fache der Perioden-dauer, der dem Übergang zwischen den beiden Hy-perfeinstrukturniveaus des Grundzustandes des Nuk-lids 133Cs entsprechenden Strahlung.
Seit 1983 wird die Zeitdefinition auch zur Längendefinition im Internationalen Einheitensystem (SI) in Verbindung mit der "Naturkonstanten c" benutzt.
Das Meter (= 1 m): ist die Länge der Strecke, die Licht im Vakuum während der Dauer von 1/299’792’458 Sekunden durchläuft.
1.9.2 SI-Basiseinheiten und Vorsätze
Länge Meter [m] Masse Kilogramm [kg] Zeit Sekunde [s] elektrische Stromstärke Ampère [A] thermodynamische Temperatur Kelvin [K] Stoffmenge Mol [mol] Lichtstärke Candela [cd] Abgeleitete Einheiten in der Geodäsie: Fläche Quadratmeter [m2] Volumen Kubikmeter [m3] Ebener Winkel Radiant [rad] (= m · m-1) Frequenz Hertz [Hz] (= s-1) Kraft Newton [N] (= kg · m · s-2)
Tip: Für das ingenieurwissenschaftli-che Denken empfiehlt es sich, bestimm-te Grössenordnungen präsent zu haben,bzw. sich vorstellen zu können.
z.B.:
[ ][ ]
c ms≈ ⋅
≈
3 10
636620
8
ρ . gon
Seite 22 1. Grundlagen
Einheit Vorsatz-zeichen
Zehner-potenzen Wert
Mega M 106 1'000‘000 Million Kilo k 103 1‘000 Tausend Hekta h 102 100 Hundert Deka da 101 10 Zehn Dezi d 10-1 0.1 Zehntel Zenti c 10-2 0.01 Hundertstel Milli m 10-3 0.001 Tausendstel Mikro µ 10-6 0.000001 Millionstel Nano n 10-9 0.000000001 Milliardstel
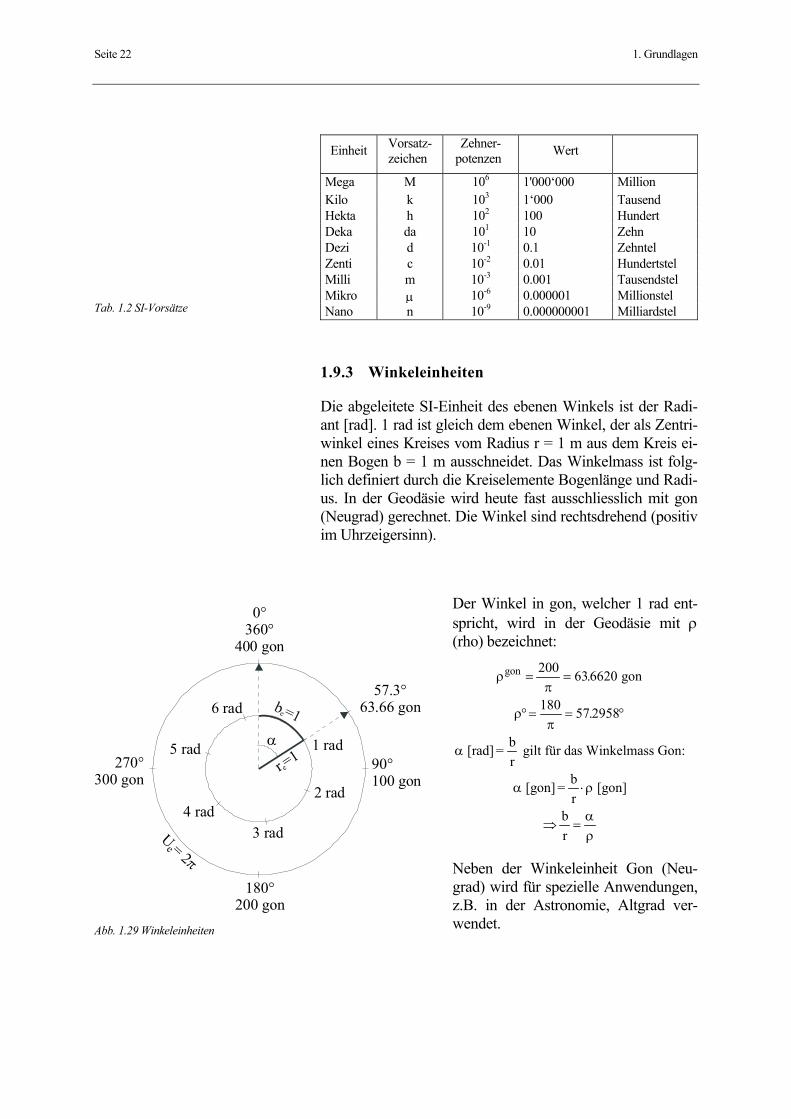
1.9.3 Winkeleinheiten
Die abgeleitete SI-Einheit des ebenen Winkels ist der Radi-ant [rad]. 1 rad ist gleich dem ebenen Winkel, der als Zentri-winkel eines Kreises vom Radius r = 1 m aus dem Kreis ei-nen Bogen b = 1 m ausschneidet. Das Winkelmass ist folg-lich definiert durch die Kreiselemente Bogenlänge und Radi-us. In der Geodäsie wird heute fast ausschliesslich mit gon (Neugrad) gerechnet. Die Winkel sind rechtsdrehend (positiv im Uhrzeigersinn).
Der Winkel in gon, welcher 1 rad ent-spricht, wird in der Geodäsie mit ρ (rho) bezeichnet:
ρπ
ρπ
α
α ρ
αρ
gon = =
°= = °
⋅
⇒ =
200 636620
180 57 2958
.
.
gon
[rad] = br
gilt für das Winkelmass Gon:
[gon] = br
[gon]
br
Neben der Winkeleinheit Gon (Neu-grad) wird für spezielle Anwendungen, z.B. in der Astronomie, Altgrad ver-wendet.
Tab. 1.2 SI-Vorsätze
90°100 gon
270°300 gon
180°200 gon
0°360°
400 gon
1 rad
2 rad
3 rad4 rad
5 rad
6 rad
r =1e
57.3°63.66 gon
α
U = 2πe
Abb. 1.29 Winkeleinheiten
1.9 Masseinheiten und Massverhältnisse in der GMT Seite 23
Umrechnung:
400 gon = 360o = 2π rad
l gon = 0.9o 1o = 1.11 gon
1 cgon = 0.54' 1' = 1.85 cgon
1 mgon = 3.24" 1" = 0.31 mgon
Früher wurden anstelle von [cgon] und [mgon] [c] und [cc] verwendet. 1c = 0.01 gon, 1cc = 0.0001 gon = 0.1 mgon.
1.9.4 Abschätzungsformeln
Abschätzungsformeln spielen in der Geodäsie eine grosse Rolle. Man berechnet überschlägig, welchen Einfluss wel-ches Messelement auf das Gesamtergebnis hat. Hieraus er-geben sich für die Praxis sinnvolle Schlüsse, die unter dem Gesichtspunkt des Kontroll- und Wirtschaftlichkeitsprinzips zu betrachten sind. Es wird durch Anwendung einer solchen Abschätzung schnell deutlich, auf welche Messgrössen der jeweiligen Anordnung sich die höchsten Genauigkeitsanfor-derungen beziehen, und damit korreliert auf welche Messele-mente die meiste Zeit aufgewendet werden muss. Es sind grundsätzlich zwei „Arten“ der Abschätzformeln zu unter-scheiden. Einfache geometrische Beziehungen, die im Rah-men dieses Kapitels vorgestellt werden sollen, und Genauig-keitsabschätzungen mittels Varianzfortpflanzungsgesetz (Kap. 6).
Es ist somit bei jeder Planung einer Messanordnung im Vor-feld (a priori) eine Genauigkeitsabschätzung durchzuführen und diese Werte nach der Messung mit denen aus der jewei-ligen Ausgleichung ermittelten Genauigkeiten (a posteriori) in Beziehung zu setzen. Unter Eingabe realistischer Werte in die Vorab-Genauigkeitsabschätzung lässt sich somit sehr an-schaulich die Qualität der Messung beurteilen und lassen sich gegebenenfalls nicht berücksichtigte Einflüsse (Modell-defekte) aufdecken. Diese Grundhaltung geodätischen Arbei-tens durchzieht wie ein roter Faden sämtliche geodätischen Problemstellungen, sowohl in der einfachen Feldmessung, wie auch in der Ingenieur- und Industrievermessung.
Erst die Theorie entscheidet darüber, was man beobach-ten kann. 6
6 aus: Heisenberg, W.[1973]: Der Teil und das Ganze, Gespräche im Umkreis
der Atomphysik, Deutscher Taschenbuchverlag, München
Seite 24 1. Grundlagen
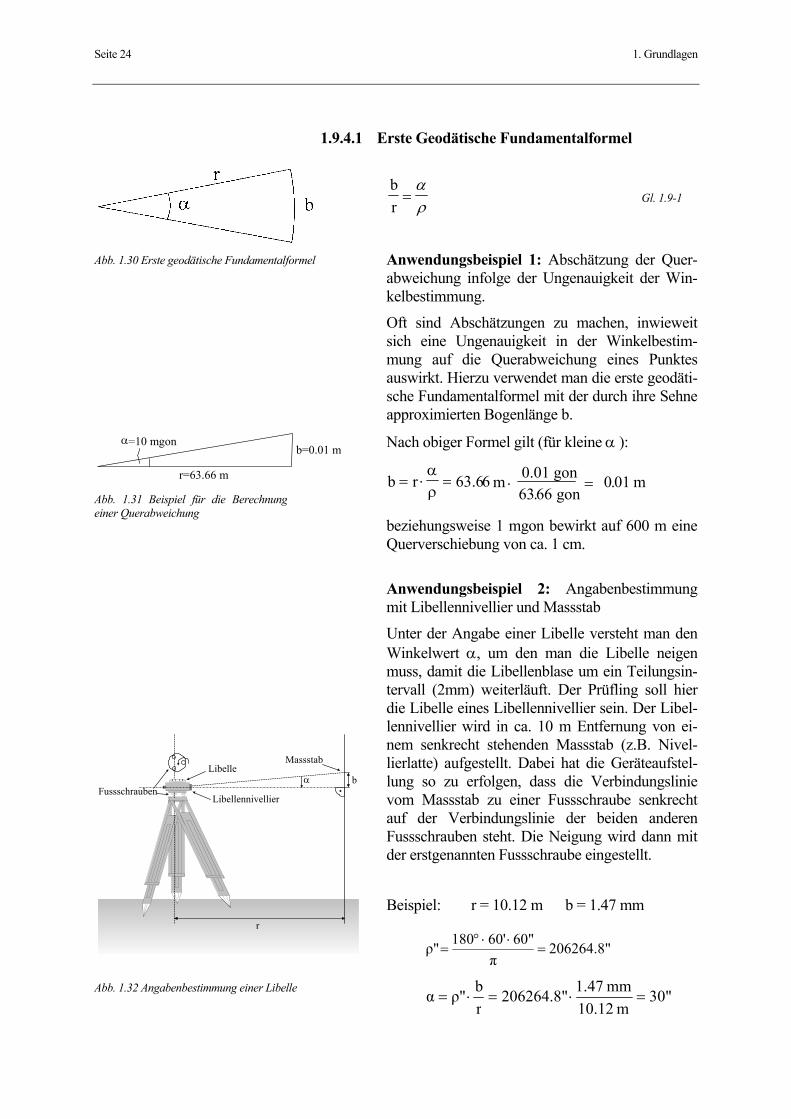
1.9.4.1 Erste Geodätische Fundamentalformel
Anwendungsbeispiel 1: Abschätzung der Quer-abweichung infolge der Ungenauigkeit der Win-kelbestimmung.
Oft sind Abschätzungen zu machen, inwieweit sich eine Ungenauigkeit in der Winkelbestim-mung auf die Querabweichung eines Punktes auswirkt. Hierzu verwendet man die erste geodäti-sche Fundamentalformel mit der durch ihre Sehne approximierten Bogenlänge b.
Nach obiger Formel gilt (für kleine α ):
beziehungsweise 1 mgon bewirkt auf 600 m eine Querverschiebung von ca. 1 cm.
Anwendungsbeispiel 2: Angabenbestimmung mit Libellennivellier und Massstab
Unter der Angabe einer Libelle versteht man den Winkelwert α, um den man die Libelle neigen muss, damit die Libellenblase um ein Teilungsin-tervall (2mm) weiterläuft. Der Prüfling soll hier die Libelle eines Libellennivellier sein. Der Libel-lennivellier wird in ca. 10 m Entfernung von ei-nem senkrecht stehenden Massstab (z.B. Nivel-lierlatte) aufgestellt. Dabei hat die Geräteaufstel-lung so zu erfolgen, dass die Verbindungslinie vom Massstab zu einer Fussschraube senkrecht auf der Verbindungslinie der beiden anderen Fussschrauben steht. Die Neigung wird dann mit der erstgenannten Fussschraube eingestellt.
Beispiel: r = 10.12 m b = 1.47 mm
206264.8"π
60" 60'180ρ" =⋅⋅°
=
30"m 10.12
mm 1.47 206264.8"rb ρ"α =⋅=⋅=
Abb. 1.30 Erste geodätische Fundamentalformel
r=63.66 m
α=10 mgonb=0.01 m
Abb. 1.31 Beispiel für die Berechnungeiner Querabweichung
r
FussschraubenLibellennivellier
MassstabLibelle
bα
Abb. 1.32 Angabenbestimmung einer Libelle
Gl. 1.9-1 br
=αρ
b r= ⋅ = ⋅ =αρ
63.666366
0 01.
. m 0.01 gon gon
m
1.9 Masseinheiten und Massverhältnisse in der GMT Seite 25
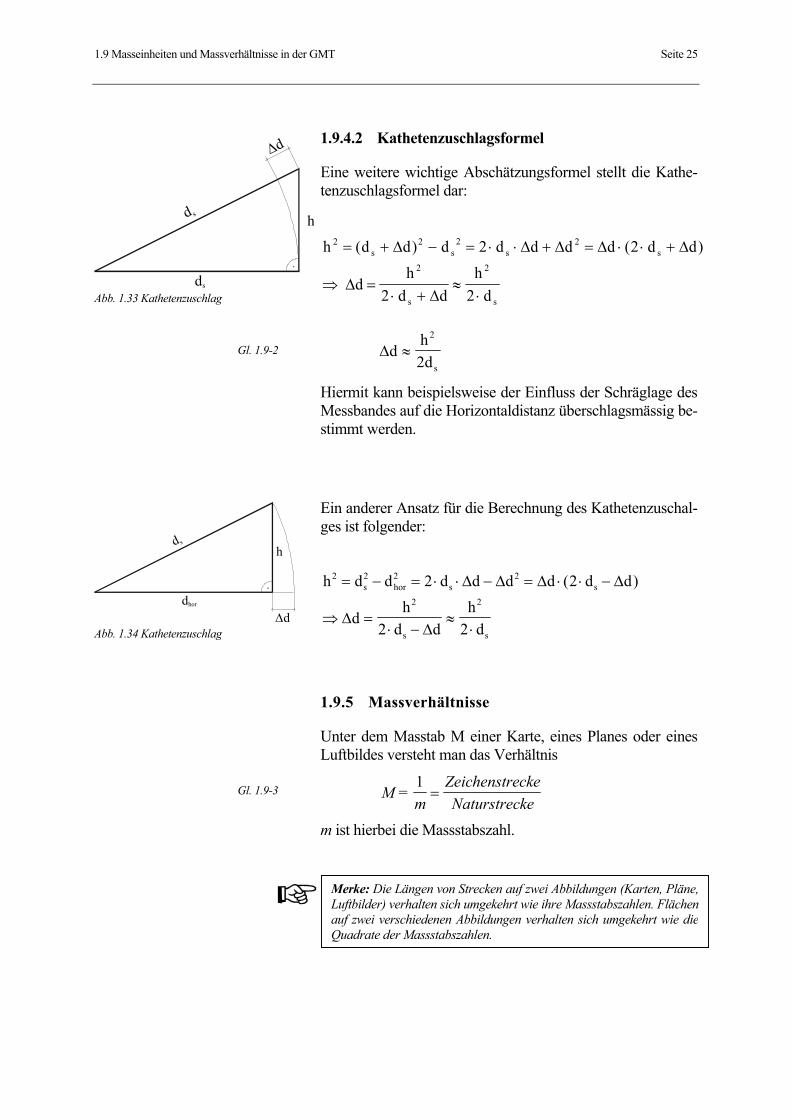
1.9.4.2 Kathetenzuschlagsformel
Eine weitere wichtige Abschätzungsformel stellt die Kathe-tenzuschlagsformel dar:
h d d d d d d d d d
dh
d dh
d
s s s s
s s
2 2 2 2
2 2
2 2
2 2
= + − = ⋅ ⋅ + = ⋅ ⋅ +
⇒ =⋅ +
≈⋅
( ) ( )∆ ∆ ∆ ∆ ∆
∆∆
∆d
hds
≈2
2 Hiermit kann beispielsweise der Einfluss der Schräglage des Messbandes auf die Horizontaldistanz überschlagsmässig be-stimmt werden.
Ein anderer Ansatz für die Berechnung des Kathetenzuschal-ges ist folgender:
h d d d d d d d d
dh
d dh
d
s hor s s
s s
2 2 2 2
2 2
2 2
2 2
= − = ⋅ ⋅ − = ⋅ ⋅ −
⇒ =⋅ −
≈⋅
∆ ∆ ∆ ∆
∆∆
( )
1.9.5 Massverhältnisse
Unter dem Masstab M einer Karte, eines Planes oder eines Luftbildes versteht man das Verhältnis
M =
mZeichenstreckeNaturstrecke
1=
m ist hierbei die Massstabszahl.
Gl. 1.9-2
Abb. 1.33 Kathetenzuschlag
Abb. 1.34 Kathetenzuschlag
h
∆d
ds
ds
hds
dhor
∆d
Gl. 1.9-3
Merke: Die Längen von Strecken auf zwei Abbildungen (Karten, Pläne,Luftbilder) verhalten sich umgekehrt wie ihre Massstabszahlen. Flächenauf zwei verschiedenen Abbildungen verhalten sich umgekehrt wie dieQuadrate der Massstabszahlen.
Seite 26 1. Grundlagen
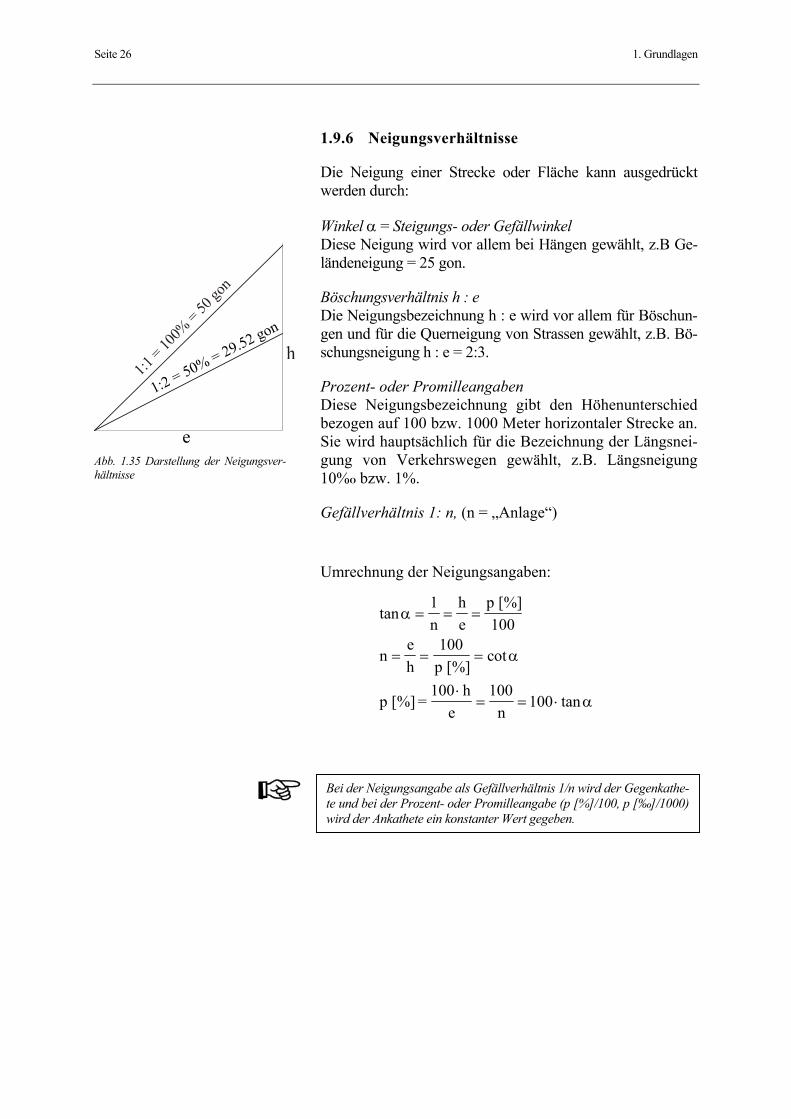
1.9.6 Neigungsverhältnisse
Die Neigung einer Strecke oder Fläche kann ausgedrückt werden durch:
Winkel α = Steigungs- oder Gefällwinkel Diese Neigung wird vor allem bei Hängen gewählt, z.B Ge-ländeneigung = 25 gon.
Böschungsverhältnis h : e Die Neigungsbezeichnung h : e wird vor allem für Böschun-gen und für die Querneigung von Strassen gewählt, z.B. Bö-schungsneigung h : e = 2:3.
Prozent- oder Promilleangaben Diese Neigungsbezeichnung gibt den Höhenunterschied bezogen auf 100 bzw. 1000 Meter horizontaler Strecke an. Sie wird hauptsächlich für die Bezeichnung der Längsnei-gung von Verkehrswegen gewählt, z.B. Längsneigung 10%O bzw. 1%.
Gefällverhältnis 1: n, (n = „Anlage“)
Umrechnung der Neigungsangaben:
tan
cot
tan
α
α
α
= = =
= = =
⋅= = ⋅
1
100
100100
nhe
p [%]
neh p [%]
p [%]n
100
=100 h
e
Abb. 1.35 Darstellung der Neigungsver-hältnisse
Bei der Neigungsangabe als Gefällverhältnis 1/n wird der Gegenkathe-te und bei der Prozent- oder Promilleangabe (p [%]/100, p [‰]/1000)wird der Ankathete ein konstanter Wert gegeben.
1:2 = 50% = 29.52 gon
e
Inhaltsverzeichnis Seite I
2. Basismesstechnik und einfache Hilfsmittel
2.1 Einfache Hilfsmittel...........................................................................................................................1 2.1.1 Arbeiten mit dem Jalon ...............................................................................................................1
2.1.1.1 Punktsignalisation ..............................................................................................................2 2.1.1.2 Fluchten von Geraden ........................................................................................................2
2.1.2 Arbeiten mit dem Senkel (Schnurlot) .........................................................................................5 2.1.3 Arbeiten mit dem Doppelpentaprisma........................................................................................6 2.1.4 Arbeiten mit dem Messband .......................................................................................................7
2.1.4.1 Einleitung ...........................................................................................................................7 2.1.4.2 Bandmessung in geneigtem Gelände, Staffelmessung .....................................................8
2.1.5 Handgefällmesser ........................................................................................................................9
2.2 Einfache Verfahren zur Lageaufnahme...................................................................................... 10 2.2.1 Einbindeverfahren .....................................................................................................................11 2.2.2 Orthogonalverfahren .................................................................................................................12
2.3 Aufstellen eines geodätischen Sensors (Instrument) .................................................................. 13 2.3.1 Stativaufstellung ........................................................................................................................13 2.3.2 Zentrierung eines geodätischen Sensors ...................................................................................15
2.3.2.1 Zentrierung mittels optischem Lot...................................................................................15 2.3.2.2 Zentrierung mittels Laserlot.............................................................................................15 2.3.2.3 Zentrierung mittels Zentrierstab ......................................................................................15 2.3.2.4 Zentrierung mittels Schnurlot ..........................................................................................16
2.3.3 Horizontierung eines geodätischen Sensors .............................................................................17 2.3.4 Vorgehen zur Sensoraufstellung mit optischem Lot oder Laserlot..........................................18
2.4 Zwangszentrierung......................................................................................................................... 20
2.5 Sicherheit von Messequipen.......................................................................................................... 21
Seite II Zusammenstellung der wichtigsten Formelzeichen
Zusammenstellung der wichtigsten Formelzeichen ∆d Korrekturfaktor des Durchhanges Dh Durchhang des Messbandes dhor Horizontaldistanz dist gemessene Distanz DPlan Distanz auf Plan gemessen
ds Schrägdistanz
dsoll fehlerbereinigte Distanz, Solldistanz Fi Fussschrauben k Korrekturfaktor M Libellenmitte S Spielpunkt
2.1 Einfache Hilfsmittel Seite 1
2. Basismesstechnik und einfache Hilfsmittel
Stichwörter: Abloten (Abstecken), Adapter, Aufwinkeln, Ausschlag, Bajonettverschluss, digitales Werk, Dosenlibelle, Dreifuss, Durchhang, Einbindeverfahren, Einvisieren, (Ein-)Fluchten, graphisches Werk, Handgefällmesser, Hand-riss, Jalon, Jalonstativ, Korrekturfaktor, Längenbestimmung, Lattenrichter, Lotlaser, Lotstock, Messband, Messlinien, Messskala, optisches Lot, Orthogonalverfahren, Pendelgriff, (Doppel-)Pentaprisma, Pfeiler, Plan, Planabgriff, Planmass-stab, Punktsignalisation, Röhrenlibelle, Schraubverschluss, Senkel (Schnurlot), Sensoraufstellung, Spielpunkt, Staffeln, Stativ, Stativteller, Vermessungsskizze, Zentrierkopf, Zent-rierstab, Zentrierstativ, (Zwangs-) Zentrierung
Zusammenfassung: Im nachfolgenden Kapitel soll eine Be-schreibung der Basisvermessungstechniken und grundsätzli-cher Handgriffe gegeben werden. Zusätzlich wird der Gebrauch der klassischen Feldausrüstung zur einfachen La-gevermessung mittels Einbinde- und Orthogonalverfahren erklärt.
2.1 Einfache Hilfsmittel
2.1.1 Arbeiten mit dem Jalon
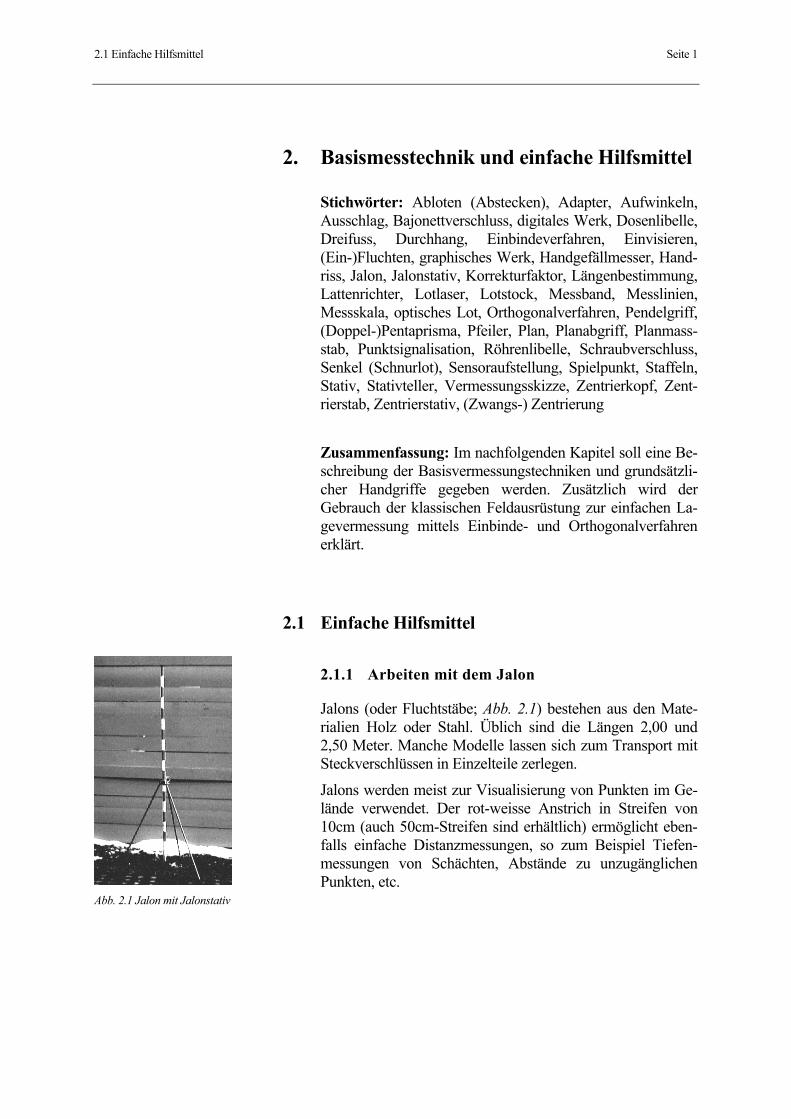
Jalons (oder Fluchtstäbe; Abb. 2.1) bestehen aus den Mate-rialien Holz oder Stahl. Üblich sind die Längen 2,00 und 2,50 Meter. Manche Modelle lassen sich zum Transport mit Steckverschlüssen in Einzelteile zerlegen.
Jalons werden meist zur Visualisierung von Punkten im Ge-lände verwendet. Der rot-weisse Anstrich in Streifen von 10cm (auch 50cm-Streifen sind erhältlich) ermöglicht eben-falls einfache Distanzmessungen, so zum Beispiel Tiefen-messungen von Schächten, Abstände zu unzugänglichen Punkten, etc.
Abb. 2.1 Jalon mit Jalonstativ
Seite 2 2. Basismesstechnik und einfache Hilfsmittel
2.1.1.1 Punktsignalisation
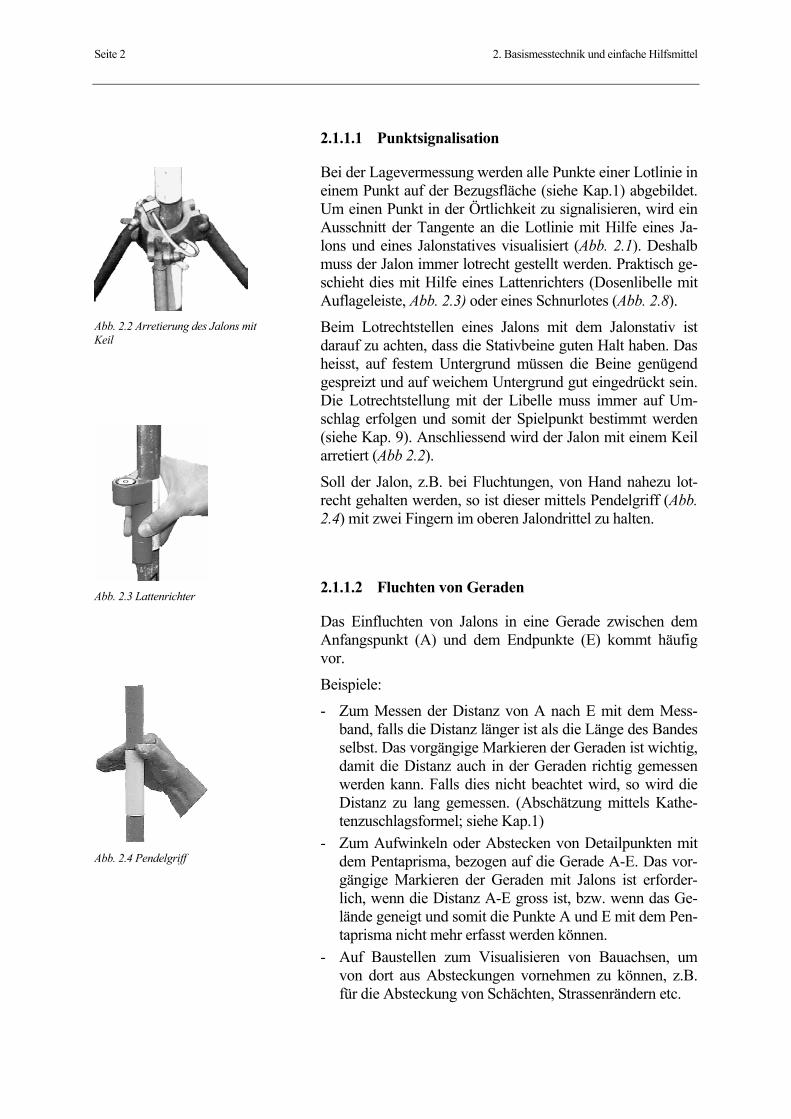
Bei der Lagevermessung werden alle Punkte einer Lotlinie in einem Punkt auf der Bezugsfläche (siehe Kap.1) abgebildet. Um einen Punkt in der Örtlichkeit zu signalisieren, wird ein Ausschnitt der Tangente an die Lotlinie mit Hilfe eines Ja-lons und eines Jalonstatives visualisiert (Abb. 2.1). Deshalb muss der Jalon immer lotrecht gestellt werden. Praktisch ge-schieht dies mit Hilfe eines Lattenrichters (Dosenlibelle mit Auflageleiste, Abb. 2.3) oder eines Schnurlotes (Abb. 2.8).
Beim Lotrechtstellen eines Jalons mit dem Jalonstativ ist darauf zu achten, dass die Stativbeine guten Halt haben. Das heisst, auf festem Untergrund müssen die Beine genügend gespreizt und auf weichem Untergrund gut eingedrückt sein. Die Lotrechtstellung mit der Libelle muss immer auf Um-schlag erfolgen und somit der Spielpunkt bestimmt werden (siehe Kap. 9). Anschliessend wird der Jalon mit einem Keil arretiert (Abb 2.2).
Soll der Jalon, z.B. bei Fluchtungen, von Hand nahezu lot-recht gehalten werden, so ist dieser mittels Pendelgriff (Abb. 2.4) mit zwei Fingern im oberen Jalondrittel zu halten.
2.1.1.2 Fluchten von Geraden
Das Einfluchten von Jalons in eine Gerade zwischen dem Anfangspunkt (A) und dem Endpunkte (E) kommt häufig vor.
Beispiele:
- Zum Messen der Distanz von A nach E mit dem Mess-band, falls die Distanz länger ist als die Länge des Bandes selbst. Das vorgängige Markieren der Geraden ist wichtig, damit die Distanz auch in der Geraden richtig gemessen werden kann. Falls dies nicht beachtet wird, so wird die Distanz zu lang gemessen. (Abschätzung mittels Kathe-tenzuschlagsformel; siehe Kap.1)
- Zum Aufwinkeln oder Abstecken von Detailpunkten mit dem Pentaprisma, bezogen auf die Gerade A-E. Das vor-gängige Markieren der Geraden mit Jalons ist erforder-lich, wenn die Distanz A-E gross ist, bzw. wenn das Ge-lände geneigt und somit die Punkte A und E mit dem Pen-taprisma nicht mehr erfasst werden können.
- Auf Baustellen zum Visualisieren von Bauachsen, um von dort aus Absteckungen vornehmen zu können, z.B. für die Absteckung von Schächten, Strassenrändern etc.
Abb. 2.3 Lattenrichter
Abb. 2.2 Arretierung des Jalons mit Keil
Abb. 2.4 Pendelgriff
2.1 Einfache Hilfsmittel Seite 3
Direktes Einfluchten von Punkten in eine Gerade
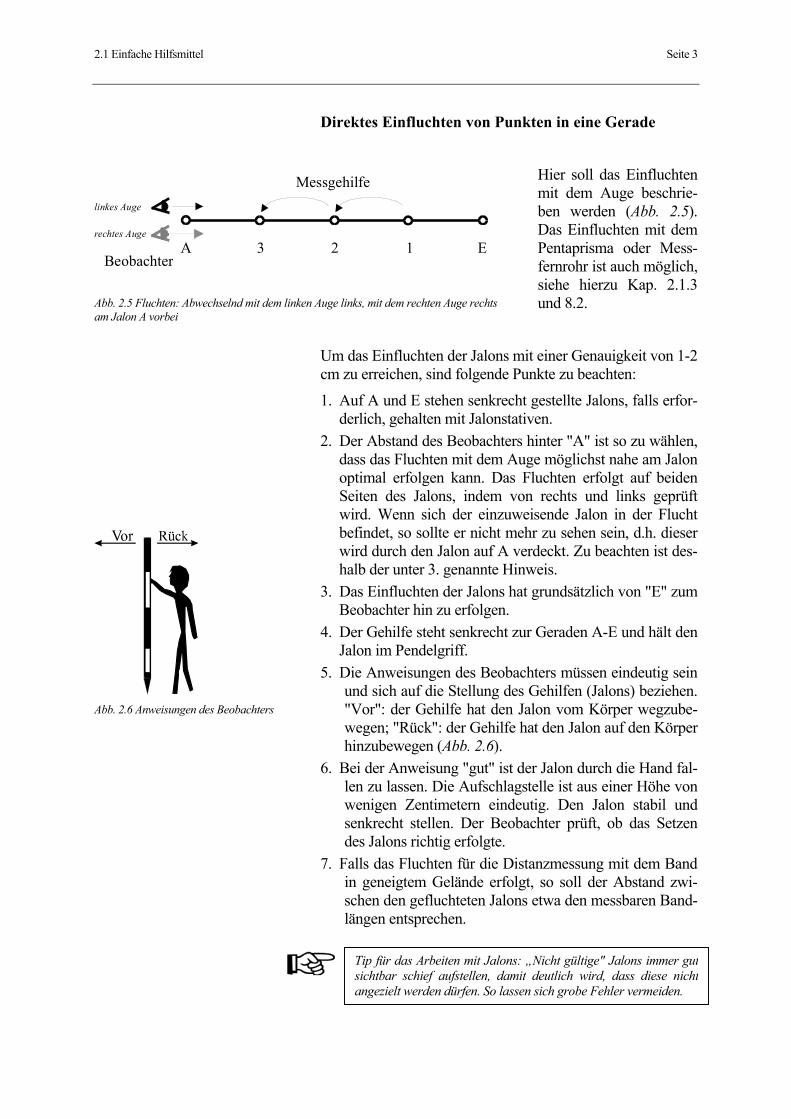
Hier soll das Einfluchten mit dem Auge beschrie-ben werden (Abb. 2.5). Das Einfluchten mit dem Pentaprisma oder Mess-fernrohr ist auch möglich, siehe hierzu Kap. 2.1.3 und 8.2.
Um das Einfluchten der Jalons mit einer Genauigkeit von 1-2 cm zu erreichen, sind folgende Punkte zu beachten:
1. Auf A und E stehen senkrecht gestellte Jalons, falls erfor-derlich, gehalten mit Jalonstativen.
2. Der Abstand des Beobachters hinter "A" ist so zu wählen, dass das Fluchten mit dem Auge möglichst nahe am Jalon optimal erfolgen kann. Das Fluchten erfolgt auf beiden Seiten des Jalons, indem von rechts und links geprüft wird. Wenn sich der einzuweisende Jalon in der Flucht befindet, so sollte er nicht mehr zu sehen sein, d.h. dieser wird durch den Jalon auf A verdeckt. Zu beachten ist des-halb der unter 3. genannte Hinweis.
3. Das Einfluchten der Jalons hat grundsätzlich von "E" zum Beobachter hin zu erfolgen.
4. Der Gehilfe steht senkrecht zur Geraden A-E und hält den Jalon im Pendelgriff.
5. Die Anweisungen des Beobachters müssen eindeutig sein und sich auf die Stellung des Gehilfen (Jalons) beziehen. "Vor": der Gehilfe hat den Jalon vom Körper wegzube-wegen; "Rück": der Gehilfe hat den Jalon auf den Körper hinzubewegen (Abb. 2.6).
6. Bei der Anweisung "gut" ist der Jalon durch die Hand fal-len zu lassen. Die Aufschlagstelle ist aus einer Höhe von wenigen Zentimetern eindeutig. Den Jalon stabil und senkrecht stellen. Der Beobachter prüft, ob das Setzen des Jalons richtig erfolgte.
7. Falls das Fluchten für die Distanzmessung mit dem Band in geneigtem Gelände erfolgt, so soll der Abstand zwi-schen den gefluchteten Jalons etwa den messbaren Band-längen entsprechen.
BeobachterA E3 2 1
Messgehilfelinkes Auge
rechtes Auge
Abb. 2.5 Fluchten: Abwechselnd mit dem linken Auge links, mit dem rechten Auge rechts am Jalon A vorbei
Abb. 2.6 Anweisungen des Beobachters
Tip für das Arbeiten mit Jalons: „Nicht gültige" Jalons immer gutsichtbar schief aufstellen, damit deutlich wird, dass diese nichtangezielt werden dürfen. So lassen sich grobe Fehler vermeiden.
Seite 4 2. Basismesstechnik und einfache Hilfsmittel
Indirektes, gegenseitiges Einfluchten mit iterativem Verfahren
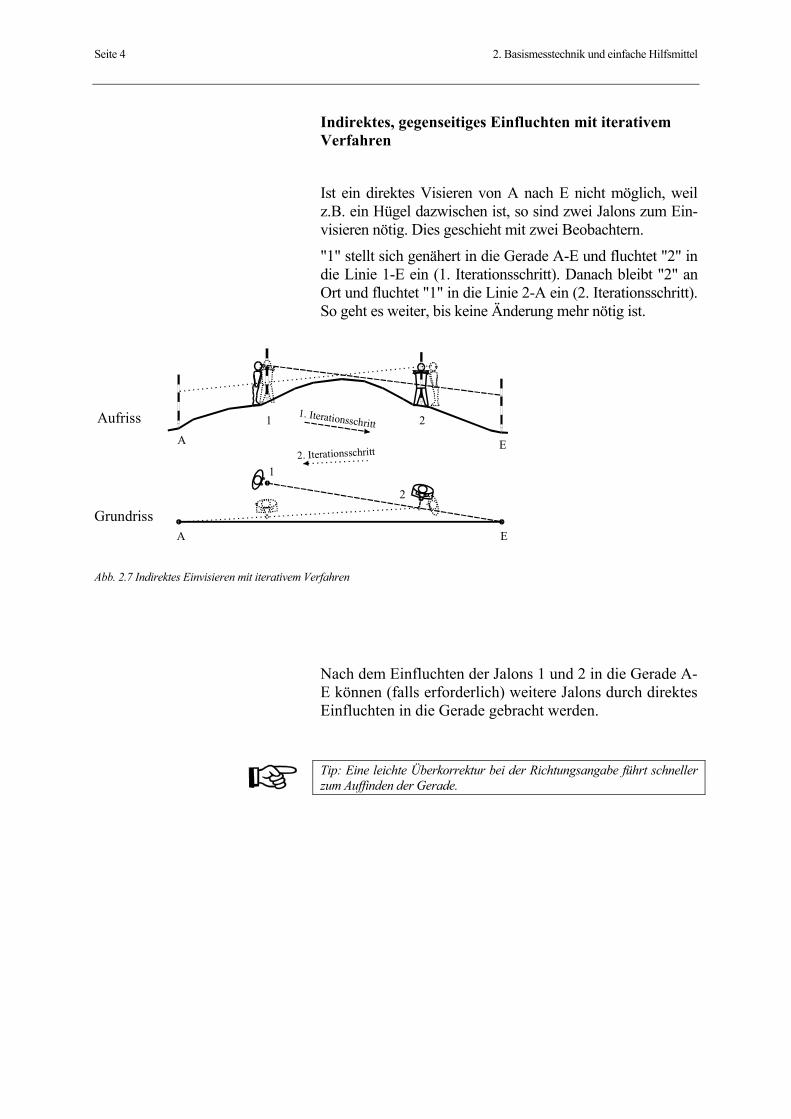
Ist ein direktes Visieren von A nach E nicht möglich, weil z.B. ein Hügel dazwischen ist, so sind zwei Jalons zum Ein-visieren nötig. Dies geschieht mit zwei Beobachtern.
"1" stellt sich genähert in die Gerade A-E und fluchtet "2" in die Linie 1-E ein (1. Iterationsschritt). Danach bleibt "2" an Ort und fluchtet "1" in die Linie 2-A ein (2. Iterationsschritt). So geht es weiter, bis keine Änderung mehr nötig ist.
Nach dem Einfluchten der Jalons 1 und 2 in die Gerade A-E können (falls erforderlich) weitere Jalons durch direktes Einfluchten in die Gerade gebracht werden.
Tip: Eine leichte Überkorrektur bei der Richtungsangabe führt schneller zum Auffinden der Gerade.
2. Iterationsschritt
1. Iterationsschritt
A
A
1
1
2
2
E
E
Aufriss
Grundriss
Abb. 2.7 Indirektes Einvisieren mit iterativem Verfahren
2.1 Einfache Hilfsmittel Seite 5
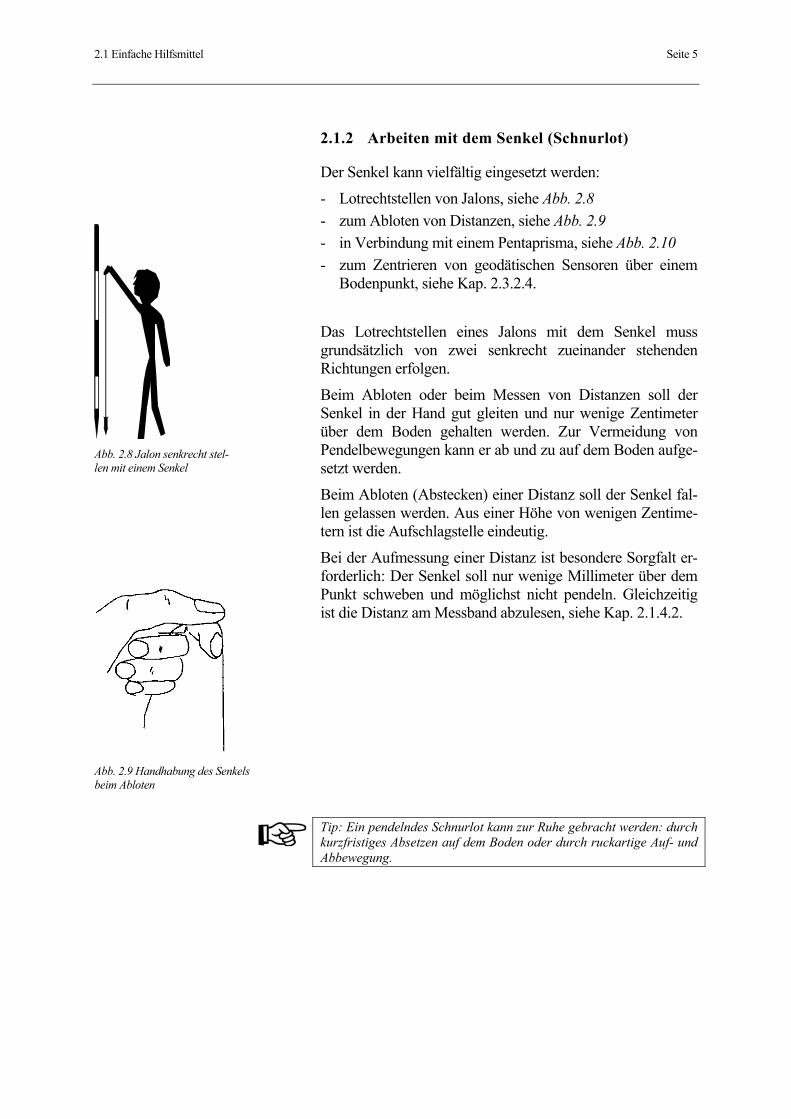
2.1.2 Arbeiten mit dem Senkel (Schnurlot)
Der Senkel kann vielfältig eingesetzt werden:
- Lotrechtstellen von Jalons, siehe Abb. 2.8 - zum Abloten von Distanzen, siehe Abb. 2.9 - in Verbindung mit einem Pentaprisma, siehe Abb. 2.10 - zum Zentrieren von geodätischen Sensoren über einem
Bodenpunkt, siehe Kap. 2.3.2.4.
Das Lotrechtstellen eines Jalons mit dem Senkel muss grundsätzlich von zwei senkrecht zueinander stehenden Richtungen erfolgen.
Beim Abloten oder beim Messen von Distanzen soll der Senkel in der Hand gut gleiten und nur wenige Zentimeter über dem Boden gehalten werden. Zur Vermeidung von Pendelbewegungen kann er ab und zu auf dem Boden aufge-setzt werden.
Beim Abloten (Abstecken) einer Distanz soll der Senkel fal-len gelassen werden. Aus einer Höhe von wenigen Zentime-tern ist die Aufschlagstelle eindeutig.
Bei der Aufmessung einer Distanz ist besondere Sorgfalt er-forderlich: Der Senkel soll nur wenige Millimeter über dem Punkt schweben und möglichst nicht pendeln. Gleichzeitig ist die Distanz am Messband abzulesen, siehe Kap. 2.1.4.2.
Tip: Ein pendelndes Schnurlot kann zur Ruhe gebracht werden: durch kurzfristiges Absetzen auf dem Boden oder durch ruckartige Auf- und Abbewegung.
Abb. 2.8 Jalon senkrecht stel-len mit einem Senkel
Abb. 2.9 Handhabung des Senkels beim Abloten
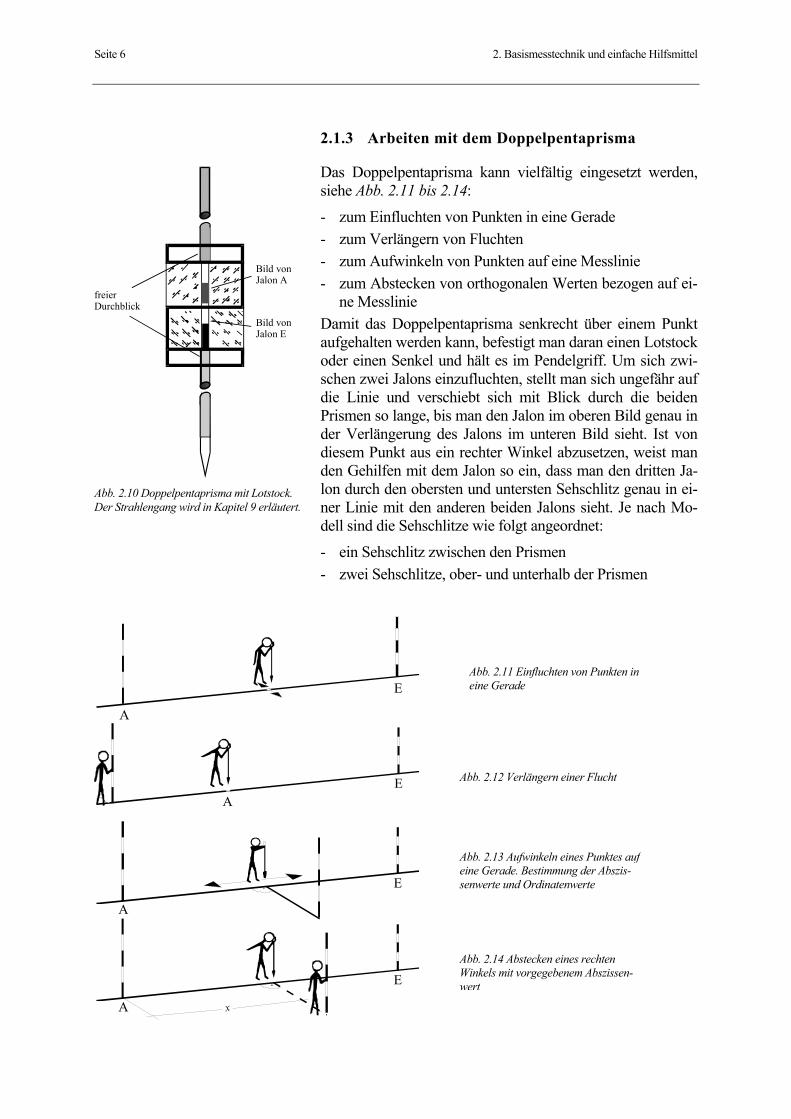
Seite 6 2. Basismesstechnik und einfache Hilfsmittel
2.1.3 Arbeiten mit dem Doppelpentaprisma
Das Doppelpentaprisma kann vielfältig eingesetzt werden, siehe Abb. 2.11 bis 2.14:
- zum Einfluchten von Punkten in eine Gerade - zum Verlängern von Fluchten - zum Aufwinkeln von Punkten auf eine Messlinie - zum Abstecken von orthogonalen Werten bezogen auf ei-
ne Messlinie Damit das Doppelpentaprisma senkrecht über einem Punkt aufgehalten werden kann, befestigt man daran einen Lotstock oder einen Senkel und hält es im Pendelgriff. Um sich zwi-schen zwei Jalons einzufluchten, stellt man sich ungefähr auf die Linie und verschiebt sich mit Blick durch die beiden Prismen so lange, bis man den Jalon im oberen Bild genau in der Verlängerung des Jalons im unteren Bild sieht. Ist von diesem Punkt aus ein rechter Winkel abzusetzen, weist man den Gehilfen mit dem Jalon so ein, dass man den dritten Ja-lon durch den obersten und untersten Sehschlitz genau in ei-ner Linie mit den anderen beiden Jalons sieht. Je nach Mo-dell sind die Sehschlitze wie folgt angeordnet:
- ein Sehschlitz zwischen den Prismen - zwei Sehschlitze, ober- und unterhalb der Prismen
Abb. 2.14 Abstecken eines rechten Winkels mit vorgegebenem Abszissen-wert
Abb. 2.13 Aufwinkeln eines Punktes auf eine Gerade. Bestimmung der Abszis-senwerte und Ordinatenwerte
Abb. 2.12 Verlängern einer Flucht
Abb. 2.11 Einfluchten von Punkten in eine Gerade
Bild vonJalon A
Bild vonJalon E
freierDurchblick
Abb. 2.10 Doppelpentaprisma mit Lotstock. Der Strahlengang wird in Kapitel 9 erläutert.
A
A
A
A
E
E
E
E
x

2.1 Einfache Hilfsmittel Seite 7
2.1.4 Arbeiten mit dem Messband
2.1.4.1 Einleitung
Das Messband ist das einfachste aber auch grundlegendste Instrument für Längenbestimmungen. In der Vermessung sollen nur Bänder aus Stahl mit einer Länge von höchstens 30 Meter verwendet werden. Für präzise Messungen ist der temperaturabhängige Längenausdehnungskoeffizient (siehe Kap. 9.10) und der Durchhang des Bandes zu berücksichti-gen.
Die meisten Messbänder haben nur in den ersten zehn Zen-timetern eine Millimetereinteilung. Die Millimeter werden darum bei den Messungen geschätzt.
Folgende Punkte sollten beim Gebrauch beachtet werden:
- Immer am Nullpunkt des Messbandes anhalten. Dieser kann von Messband zu Messband verschieden sein! (Abb 2.16)
- Zum Messen muss immer ein Zug von 50 N auf dem Messband sein, denn für diese Kraft ist es kalibriert.
- Während der Messung darf das Messband nicht verdreht sein oder Schlingen bilden.
- Beim Messen über Strassen ist darauf zu achten, dass das Messband nicht von einem Auto überfahren und dabei beschä-digt wird.
- Auf Gleisanlagen dürfen nur speziell isolierte Messbänder verwendet werden.
Einfluss des Durchhanges bei der Bandmessung Falls mit freihängendem Band gemessen wird, so ist der Ein-fluss des Durchhanges zu berücksichtigen.
Der Korrekturwert beträgt:
Beispiel: dIst = 10 m , ∆h = 20 cm → ∆d = -1 cm, dSoll = 9.99 m
Abb. 2.15 Stahlband mit Aufrollrahmen
Abb. 2.16 Verschiedene Messband-Anfänge. Das Band ‚B‘ ist nur zum Messen von Innenmassen geeignet. Dazu kann der Haltering um 90° umgeklappt und somit die „Nullstelle“direkt am Objekt angehalten werden.
∆∆
dh
dIst≈ −
⋅⋅
83
2
dSoll
∆h
dIst Abb. 2.17 Einfluss des Durchhanges
Gl. 2.1-1
dSoll: Soll-Länge dIst: gemessene Länge wegen Durchhang∆h: Durchhang ∆d: Korrekturwert
Anmerkung: Falls in geneigtem Gelände eine Distanz mit einerGenauigkeit von < 3 cm abzustecken oder zu messen ist, so istdie elektro-optische Distanzmessung, zum Beispiel mit demelektronischen Messband (siehe Kap. 7.3.10), zu empfehlen.
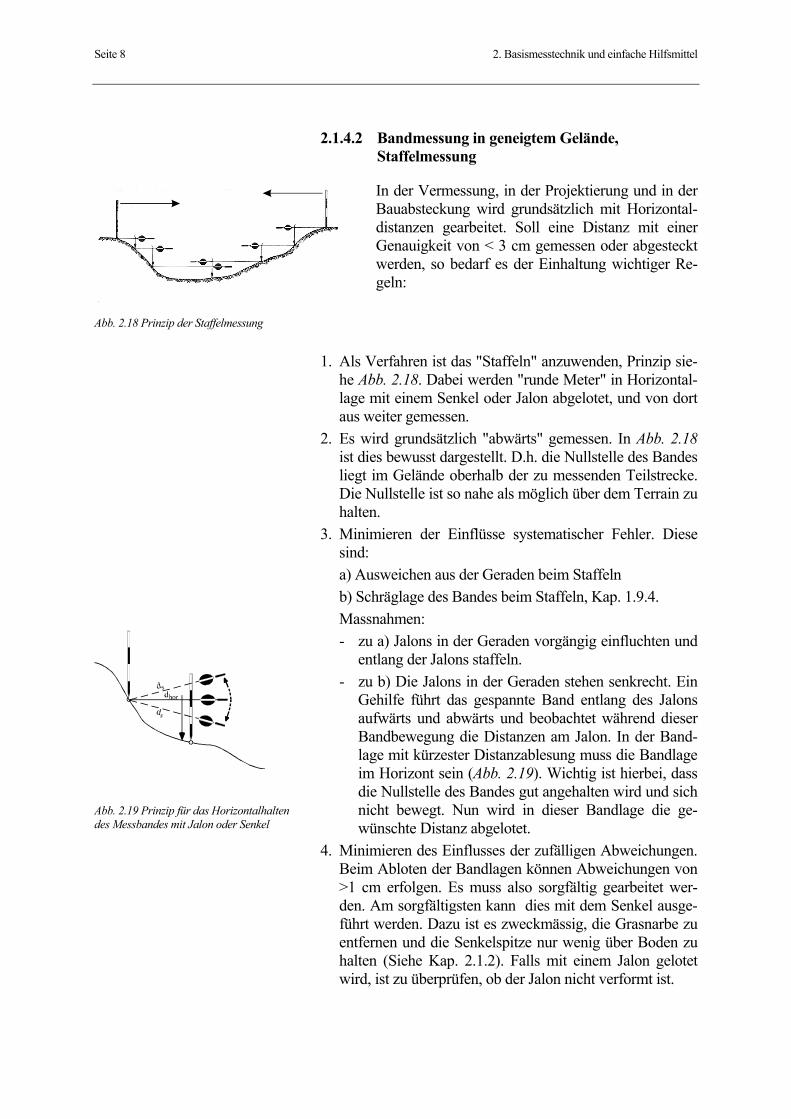
Seite 8 2. Basismesstechnik und einfache Hilfsmittel
2.1.4.2 Bandmessung in geneigtem Gelände, Staffelmessung
In der Vermessung, in der Projektierung und in der Bauabsteckung wird grundsätzlich mit Horizontal-distanzen gearbeitet. Soll eine Distanz mit einer Genauigkeit von < 3 cm gemessen oder abgesteckt werden, so bedarf es der Einhaltung wichtiger Re-geln:
1. Als Verfahren ist das "Staffeln" anzuwenden, Prinzip sie-he Abb. 2.18. Dabei werden "runde Meter" in Horizontal-lage mit einem Senkel oder Jalon abgelotet, und von dort aus weiter gemessen.
2. Es wird grundsätzlich "abwärts" gemessen. In Abb. 2.18 ist dies bewusst dargestellt. D.h. die Nullstelle des Bandes liegt im Gelände oberhalb der zu messenden Teilstrecke. Die Nullstelle ist so nahe als möglich über dem Terrain zu halten.
3. Minimieren der Einflüsse systematischer Fehler. Diese sind:
a) Ausweichen aus der Geraden beim Staffeln b) Schräglage des Bandes beim Staffeln, Kap. 1.9.4. Massnahmen:
- zu a) Jalons in der Geraden vorgängig einfluchten und entlang der Jalons staffeln.
- zu b) Die Jalons in der Geraden stehen senkrecht. Ein Gehilfe führt das gespannte Band entlang des Jalons aufwärts und abwärts und beobachtet während dieser Bandbewegung die Distanzen am Jalon. In der Band-lage mit kürzester Distanzablesung muss die Bandlage im Horizont sein (Abb. 2.19). Wichtig ist hierbei, dass die Nullstelle des Bandes gut angehalten wird und sich nicht bewegt. Nun wird in dieser Bandlage die ge-wünschte Distanz abgelotet.
4. Minimieren des Einflusses der zufälligen Abweichungen. Beim Abloten der Bandlagen können Abweichungen von >1 cm erfolgen. Es muss also sorgfältig gearbeitet wer-den. Am sorgfältigsten kann dies mit dem Senkel ausge-führt werden. Dazu ist es zweckmässig, die Grasnarbe zu entfernen und die Senkelspitze nur wenig über Boden zu halten (Siehe Kap. 2.1.2). Falls mit einem Jalon gelotet wird, ist zu überprüfen, ob der Jalon nicht verformt ist.
Abb. 2.18 Prinzip der Staffelmessung
Abb. 2.19 Prinzip für das Horizontalhalten des Messbandes mit Jalon oder Senkel
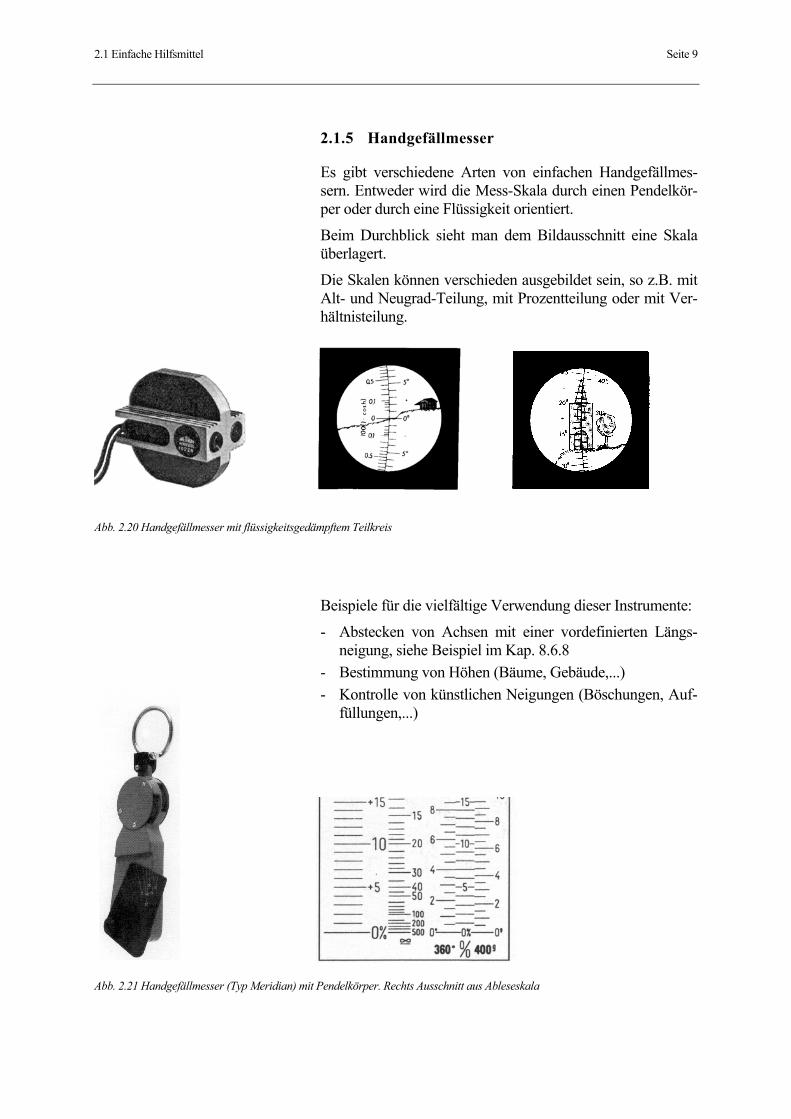
2.1 Einfache Hilfsmittel Seite 9
2.1.5 Handgefällmesser
Es gibt verschiedene Arten von einfachen Handgefällmes-sern. Entweder wird die Mess-Skala durch einen Pendelkör-per oder durch eine Flüssigkeit orientiert.
Beim Durchblick sieht man dem Bildausschnitt eine Skala überlagert.
Die Skalen können verschieden ausgebildet sein, so z.B. mit Alt- und Neugrad-Teilung, mit Prozentteilung oder mit Ver-hältnisteilung.
Beispiele für die vielfältige Verwendung dieser Instrumente:
- Abstecken von Achsen mit einer vordefinierten Längs-neigung, siehe Beispiel im Kap. 8.6.8
- Bestimmung von Höhen (Bäume, Gebäude,...) - Kontrolle von künstlichen Neigungen (Böschungen, Auf-
füllungen,...)
Abb. 2.20 Handgefällmesser mit flüssigkeitsgedämpftem Teilkreis
Abb. 2.21 Handgefällmesser (Typ Meridian) mit Pendelkörper. Rechts Ausschnitt aus Ableseskala

Seite 10 2. Basismesstechnik und einfache Hilfsmittel
2.2 Einfache Verfahren zur Lageaufnahme
Unter einfachen Verfahren versteht man die Orthogonalauf-nahme und das Einbindeverfahren. Mit den im Kapitel 2.1 gezeigten Instrumenten und Hilfsmitteln lassen sich diese be-reits durchführen. Vor Beginn der Aufnahme ist das aufzu-nehmende Gebiet mit einem Rahmen von Messlinien zu ü-berspannen. Die Messlinie muss sowohl im Plan als auch in der Örtlichkeit definiert sein. Als Endpunkte der Messlinien können demzufolge Grenzpunkte, Basispunkte und eindeutig definierte Detailpunkte verwendet werden. Sind Koordinaten der aufzunehmenden Punkte verlangt, so müssen die Koor-dinaten der Messlinien-Endpunkte im Landeskoordinaten-system bekannt sein bzw. bestimmt werden können.
Falls Koordinaten der aufgemessenen Punkte gerechnet wer-den, oder die Kartierung der Aufnahmewerte im Plan später erfolgt, so ist das Führen einer Vermessungsskizze unerläss-lich. Falls die Aufnahmewerte aber sofort im Plan kartiert werden und eine Koordinatenberechnung nicht erwünscht ist, so muss der Plan-Massstab berücksichtigt werden. Dazu misst man die Distanz Anfangs- zu Endpunkt der Messlinie im Feld (dhor) und vergleicht sie mit dem entsprechenden Planabgriff. Der Korrekturfaktor k = DPlan/dhor wird bestimmt. Für die Kartierung müssen dann alle Messwerte korrigiert werden, es gilt dann DPlan= dhor . k.
Ein graphisches Werk ist heute die Ausnahme. Eine Über-führung in ein digitales Werk wird angestrebt.
Die Begriffe "Plan" und "Karte"sind im Kap. 7.7 erläutert.
Die "Vermessungsskizze" ist eineSkizze, in der Messwerte im Feldnotiert werden. Sie ist nicht zuverwechseln mit dem "Handriss".Dieser ist eine Kopie des mass-stäblichen Grundbuchplanes mitErgänzungen aus der Vermes-sungsskizze und wird im Büroerstellt.
Der Begriff "graphisches Werk" stammt aus der Amtlichen Ver-messung und bedeutet, dass als Messresultat nur ein Plan be-steht, also keine Koordinaten-werte von Fixpunkten, Grenz-punkten, Detailpunkten etc.
Unter dem Begriff "digitales Werk" wird in der Regel ein vollnumerisches Werk verstan-den, in dem sämtliche Punkte eines Planes in Koordinaten vorhanden bzw. am Bildschirm abrufbar sind.

2.2 Einfache Verfahren zur Lageaufnahme Seite 11
2.2.1 Einbindeverfahren
Die Mindestkonfiguration besteht aus Jalons, Senkel, Mess-band und zwei Personen.
Das Verfahren kann eine eigenständige Methode zur Ergän-zung von bestehenden Plänen sein. Mehrheitlich wird das Verfahren in Verbindung mit der Orthogonalaufnahme, der Polaraufnahme und dem Satellitenverfahren (GPS) verwen-det. Besonders bei Aufnahmen in überbauten Gebieten ist das Verfahren eine zweckmässige Ergänzung, siehe Kap. 7.3.
Die Messlinien werden in einem übergeordneten Rahmen (z.B. ins übergeordnete Messliniennetz A-D) eingebunden. D.h. die Messlinien werden bis zur Rahmenseite verlängert und die daraus resultierenden Schnittpunkte eingemessen. Durchgreifende Kontrollen sind unerlässlich, z.B. indem auf einer Messlinie die einzelnen Distanzen gemessen, aufsum-miert und mit der Gesamtdistanz verglichen werden.
Einbindepunkte
Übergeordnetes Messliniennetz
Bekannte Punkte
A
B
C
D
Geradheitssymbol
Abb. 2.22 Prinzip des Einbindeverfahrens
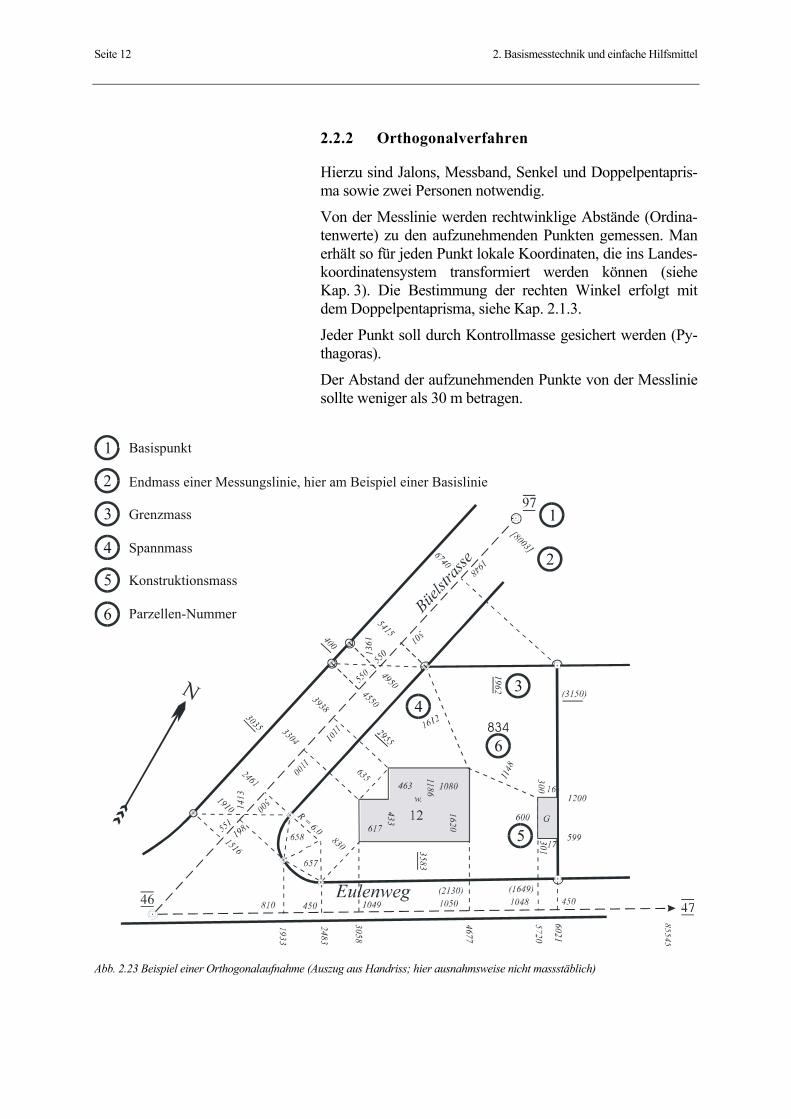
Seite 12 2. Basismesstechnik und einfache Hilfsmittel
834
1
5
2
34
6
1
2
3
4
5
6
Basispunkt
Grenzmass
Spannmass
Konstruktionsmass
Parzellen-Nummer
Endmass einer Messungslinie, hier am Beispiel einer Basislinie
4677
2.2.2 Orthogonalverfahren
Hierzu sind Jalons, Messband, Senkel und Doppelpentapris-ma sowie zwei Personen notwendig.
Von der Messlinie werden rechtwinklige Abstände (Ordina-tenwerte) zu den aufzunehmenden Punkten gemessen. Man erhält so für jeden Punkt lokale Koordinaten, die ins Landes-koordinatensystem transformiert werden können (siehe Kap. 3). Die Bestimmung der rechten Winkel erfolgt mit dem Doppelpentaprisma, siehe Kap. 2.1.3.
Jeder Punkt soll durch Kontrollmasse gesichert werden (Py-thagoras).
Der Abstand der aufzunehmenden Punkte von der Messlinie sollte weniger als 30 m betragen.
Abb. 2.23 Beispiel einer Orthogonalaufnahme (Auszug aus Handriss; hier ausnahmsweise nicht massstäblich)
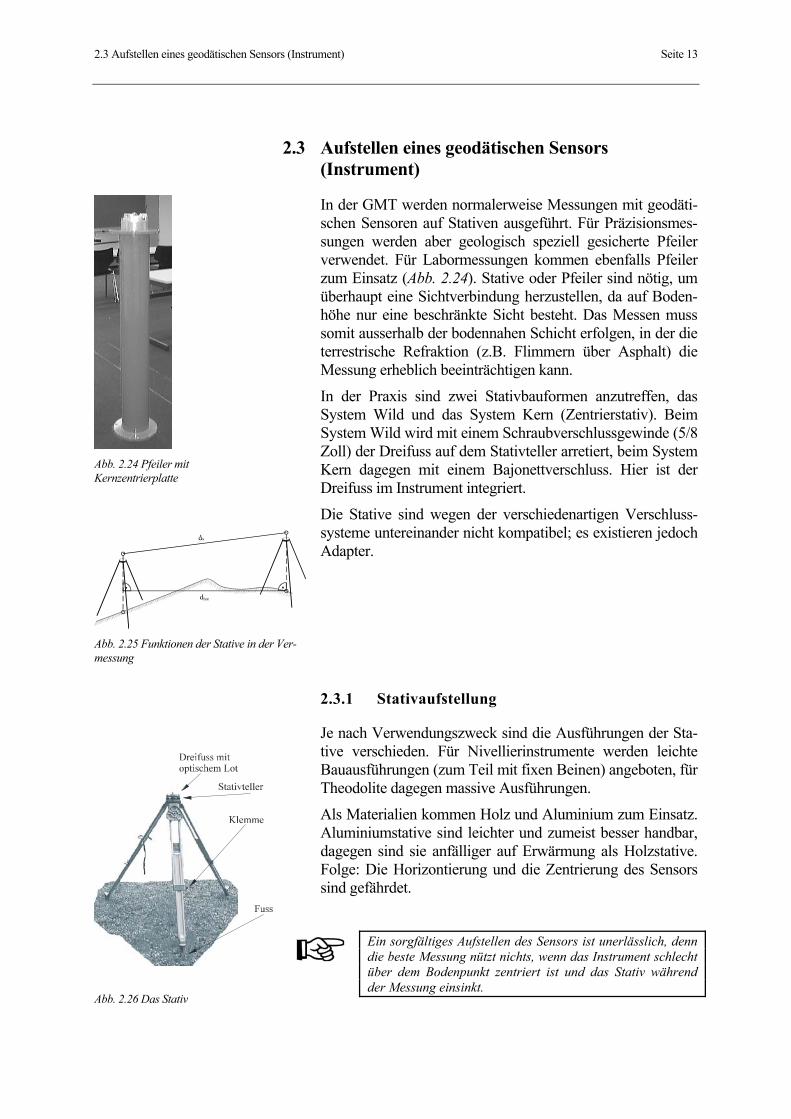
2.3 Aufstellen eines geodätischen Sensors (Instrument) Seite 13
2.3 Aufstellen eines geodätischen Sensors (Instrument)
In der GMT werden normalerweise Messungen mit geodäti-schen Sensoren auf Stativen ausgeführt. Für Präzisionsmes-sungen werden aber geologisch speziell gesicherte Pfeiler verwendet. Für Labormessungen kommen ebenfalls Pfeiler zum Einsatz (Abb. 2.24). Stative oder Pfeiler sind nötig, um überhaupt eine Sichtverbindung herzustellen, da auf Boden-höhe nur eine beschränkte Sicht besteht. Das Messen muss somit ausserhalb der bodennahen Schicht erfolgen, in der die terrestrische Refraktion (z.B. Flimmern über Asphalt) die Messung erheblich beeinträchtigen kann.
In der Praxis sind zwei Stativbauformen anzutreffen, das System Wild und das System Kern (Zentrierstativ). Beim System Wild wird mit einem Schraubverschlussgewinde (5/8 Zoll) der Dreifuss auf dem Stativteller arretiert, beim System Kern dagegen mit einem Bajonettverschluss. Hier ist der Dreifuss im Instrument integriert.
Die Stative sind wegen der verschiedenartigen Verschluss-systeme untereinander nicht kompatibel; es existieren jedoch Adapter.
2.3.1 Stativaufstellung
Je nach Verwendungszweck sind die Ausführungen der Sta-tive verschieden. Für Nivellierinstrumente werden leichte Bauausführungen (zum Teil mit fixen Beinen) angeboten, für Theodolite dagegen massive Ausführungen.
Als Materialien kommen Holz und Aluminium zum Einsatz. Aluminiumstative sind leichter und zumeist besser handbar, dagegen sind sie anfälliger auf Erwärmung als Holzstative. Folge: Die Horizontierung und die Zentrierung des Sensors sind gefährdet.
Ein sorgfältiges Aufstellen des Sensors ist unerlässlich, denn die beste Messung nützt nichts, wenn das Instrument schlecht über dem Bodenpunkt zentriert ist und das Stativ während der Messung einsinkt.
ds
dhor
Abb. 2.25 Funktionen der Stative in der Ver-messung
Abb. 2.24 Pfeiler mit Kernzentrierplatte
Abb. 2.26 Das Stativ
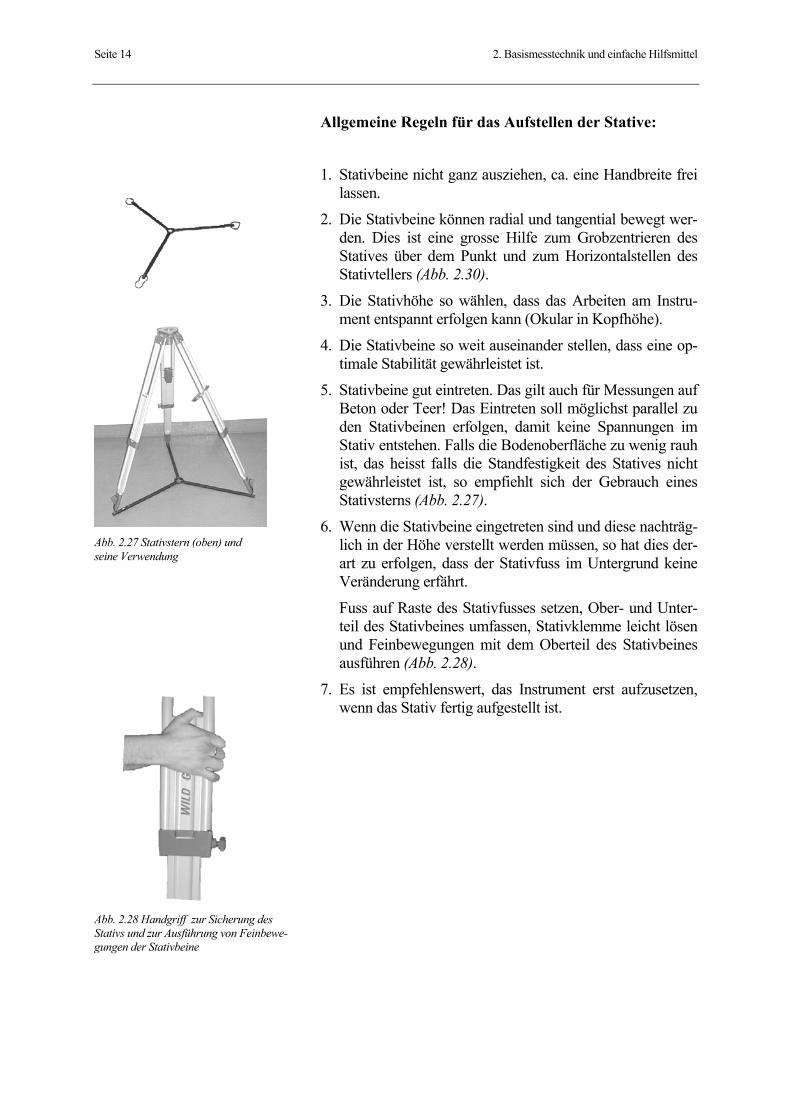
Seite 14 2. Basismesstechnik und einfache Hilfsmittel
Allgemeine Regeln für das Aufstellen der Stative:
1. Stativbeine nicht ganz ausziehen, ca. eine Handbreite frei lassen.
2. Die Stativbeine können radial und tangential bewegt wer-den. Dies ist eine grosse Hilfe zum Grobzentrieren des Statives über dem Punkt und zum Horizontalstellen des Stativtellers (Abb. 2.30).
3. Die Stativhöhe so wählen, dass das Arbeiten am Instru-ment entspannt erfolgen kann (Okular in Kopfhöhe).
4. Die Stativbeine so weit auseinander stellen, dass eine op-timale Stabilität gewährleistet ist.
5. Stativbeine gut eintreten. Das gilt auch für Messungen auf Beton oder Teer! Das Eintreten soll möglichst parallel zu den Stativbeinen erfolgen, damit keine Spannungen im Stativ entstehen. Falls die Bodenoberfläche zu wenig rauh ist, das heisst falls die Standfestigkeit des Statives nicht gewährleistet ist, so empfiehlt sich der Gebrauch eines Stativsterns (Abb. 2.27).
6. Wenn die Stativbeine eingetreten sind und diese nachträg-lich in der Höhe verstellt werden müssen, so hat dies der-art zu erfolgen, dass der Stativfuss im Untergrund keine Veränderung erfährt.
Fuss auf Raste des Stativfusses setzen, Ober- und Unter-teil des Stativbeines umfassen, Stativklemme leicht lösen und Feinbewegungen mit dem Oberteil des Stativbeines ausführen (Abb. 2.28).
7. Es ist empfehlenswert, das Instrument erst aufzusetzen, wenn das Stativ fertig aufgestellt ist.
Abb. 2.27 Stativstern (oben) und seine Verwendung
Abb. 2.28 Handgriff zur Sicherung des Stativs und zur Ausführung von Feinbewe-gungen der Stativbeine

2.3 Aufstellen eines geodätischen Sensors (Instrument) Seite 15
Zentrierungsarten: - mittels optischem Lot
- mittels Lotlaser - mittels Zentrierstab - mittels Schnurlot
2.3.2 Zentrierung eines geodätischen Sensors
Unter einer Zentrierung versteht man die Koinzidenz der vertikalen Sensorachse mit der Lotlinie durch den Be-zugspunkt. Eine Sensorzentrierung wird mittels eines opti-schen Lotes, eines Lotlasers, eines Zentrierstabes oder ei-nes Schnurlots herbeigeführt. Die einzelnen Handgriffe werden im folgenden erläutert.
2.3.2.1 Zentrierung mittels optischem Lot
Die genaueste Zentrierung erlaubt das optische Lot (0.5 mm). Hierbei muss die Anzugsschraube des Stativs zum Durchblick beim Zentrieren innen hohl sein. Der Vorgang des Zentrierens mittels optischem Lot wird unter Kap. 2.3.4 eingehend erläutert.
2.3.2.2 Zentrierung mittels Laserlot
Das Laserlot ist ein im Unterbau des Instrumentes integrier-ter Diodenlaser, welcher die Ziellinie des Lotes visualisiert. Zentriert wird analog zum optischen Lot (siehe Kap. 2.3.4). Der Vorteil liegt in der Handhabung: durch die Projektion eines Laserpunktes auf den Boden wird die Zentrierung er-leichtert.
2.3.2.3 Zentrierung mittels Zentrierstab
Das Stativ grob über das Zentrum des Punktes stellen. An-zugsschraube unter Stativteller lösen und den ausziehbaren Zentrierstab mit seiner Spitze in das Punktzentrum stellen. Die Dosenlibelle am Zentrierstab durch radiales und tangen-tiales Verschieben der Stativbeine grob zum Einspielen brin-gen. Stativbeine eintreten. Dann die Dosenlibelle des Zent-rierstabes durch Höhenverstellen der Stativbeine und Ver-schieben des Zentrierkopfes zum Einspielen bringen. An-schliessend das Instrument aufsetzen. Das Instrument ist be-reits grobhorizontiert und auch zentriert. Somit ist nur noch die Feinhorizontierung vorzunehmen. Beschrieben ist dieser Vorgang im Kap. 2.3.3. Bei der Zentrierung mittels Zentrier-stab ist eine Genauigkeit von etwa 1-2 mm zu erreichen.
radial tan
genti
al
Abb. 2.30 Zentrierstab, System Kern 1) Zentrierstab 2) Kugelfläche 3) Dosenlibelle
Abb. 2.29 Tachymeter TCA 1100 L mit integriertem Laserlot

Seite 16 2. Basismesstechnik und einfache Hilfsmittel
2.3.2.4 Zentrierung mittels Schnurlot
Das Stativ ist grob über dem Punkt aufzustellen; es ist dar-auf zu achten, dass der Stativteller etwa horizontal ist. Der Senkel wird im Haken unten am Schraubverschluss des Stativtellers eingehängt. Der Schraubverschluss soll sich etwa in der Mitte der Stativtelleröffnung befinden.
Prüfen der Senkellage zum Bodenpunkt. Falls die Abwei-chung >10 cm ist, Stativ anheben und versetzen. Stativ eintreten. Instrument aufsetzen, mit Schraubverschluss ar-retieren.
Instrument mit Dosenlibellen grobhorizontieren, Senkel bis auf ca. 5 mm über Zentrum des Punktes stellen. Schraubverschluss leicht lösen und Instrument verschie-ben bis Senkel genau über dem Zentrum hängt. Schraub-verschluss klemmen. Instrument feinhorizontieren.
Nochmals Zentrierung überprüfen. Falls diese ungenügend ist, so ist die Zentrierung und die Feinhorizontierung zu wie-derholen. Bei der Zentrierung mittels Schnurlot ist bei Wind-stille eine Genauigkeit von 2 mm erreichbar.
Anmerkung:Falls das Instrument oder der Dreifuss mit opti-schem Lot ausgerüstet ist, kann die Feinzentrierung anstatt mit dem Senkel mit dem optischen Lot erfolgen.
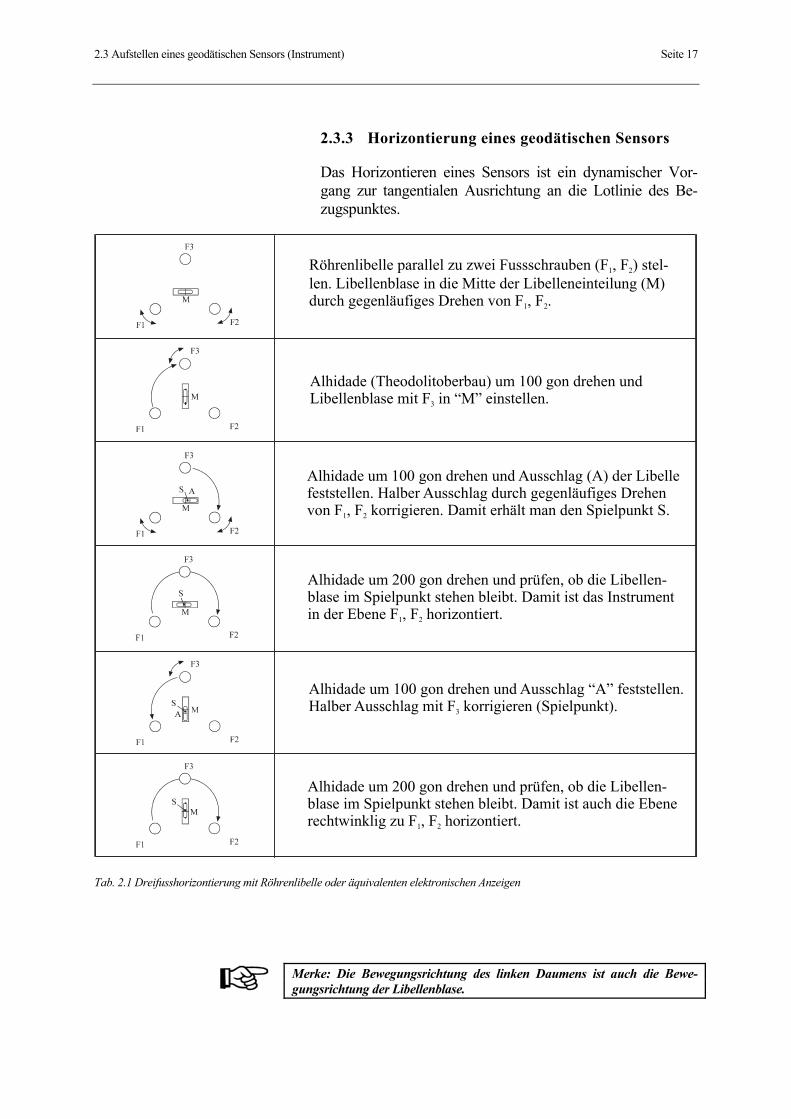
2.3 Aufstellen eines geodätischen Sensors (Instrument) Seite 17
.
2.3.3 Horizontierung eines geodätischen Sensors
Das Horizontieren eines Sensors ist ein dynamischer Vor-gang zur tangentialen Ausrichtung an die Lotlinie des Be-zugspunktes.
Merke: Die Bewegungsrichtung des linken Daumens ist auch die Bewe-gungsrichtung der Libellenblase.
Tab. 2.1 Dreifusshorizontierung mit Röhrenlibelle oder äquivalenten elektronischen Anzeigen
Röhrenlibelle parallel zu zwei Fussschrauben (F , F ) stel-len. Libellenblase in die Mitte der Libelleneinteilung (M) durch gegenläufiges Drehen von F , F .
1 2
1 2
Alhidade (Theodolitoberbau) um 100 gon drehen undLibellenblase mit F in “M” einstellen.3
Alhidade um 100 gon drehen und Ausschlag (A) der Libellefeststellen. Halber Ausschlag durch gegenläufiges Drehenvon F , F korrigieren. Damit erhält man den Spielpunkt S.1 2
Alhidade um 200 gon drehen und prüfen, ob die Libellen-blase im Spielpunkt stehen bleibt. Damit ist das Instrument in der Ebene F , F horizontiert.1 2
Alhidade um 100 gon drehen und Ausschlag “A” feststellen.Halber Ausschlag mit F korrigieren (Spielpunkt).3
Alhidade um 200 gon drehen und prüfen, ob die Libellen-blase im Spielpunkt stehen bleibt. Damit ist auch die Ebenerechtwinklig zu F , F horizontiert.1 2
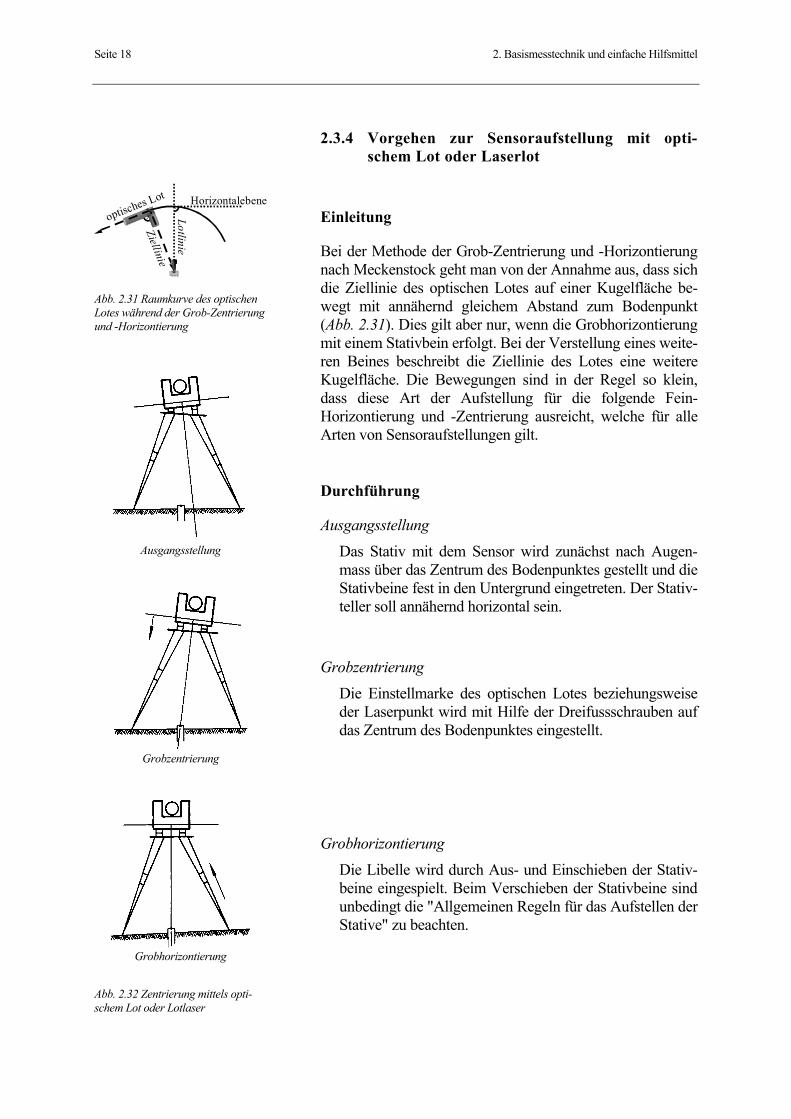
Seite 18 2. Basismesstechnik und einfache Hilfsmittel
2.3.4 Vorgehen zur Sensoraufstellung mit opti-schem Lot oder Laserlot
Einleitung
Bei der Methode der Grob-Zentrierung und -Horizontierung nach Meckenstock geht man von der Annahme aus, dass sich die Ziellinie des optischen Lotes auf einer Kugelfläche be-wegt mit annähernd gleichem Abstand zum Bodenpunkt (Abb. 2.31). Dies gilt aber nur, wenn die Grobhorizontierung mit einem Stativbein erfolgt. Bei der Verstellung eines weite-ren Beines beschreibt die Ziellinie des Lotes eine weitere Kugelfläche. Die Bewegungen sind in der Regel so klein, dass diese Art der Aufstellung für die folgende Fein-Horizontierung und -Zentrierung ausreicht, welche für alle Arten von Sensoraufstellungen gilt.
Durchführung
Ausgangsstellung
Das Stativ mit dem Sensor wird zunächst nach Augen-mass über das Zentrum des Bodenpunktes gestellt und die Stativbeine fest in den Untergrund eingetreten. Der Stativ-teller soll annähernd horizontal sein.
Grobzentrierung
Die Einstellmarke des optischen Lotes beziehungsweise der Laserpunkt wird mit Hilfe der Dreifussschrauben auf das Zentrum des Bodenpunktes eingestellt.
Grobhorizontierung
Die Libelle wird durch Aus- und Einschieben der Stativ-beine eingespielt. Beim Verschieben der Stativbeine sind unbedingt die "Allgemeinen Regeln für das Aufstellen der Stative" zu beachten.
optisches Lot
Ziellinie
Lotlinie
Horizontalebene
Abb. 2.31 Raumkurve des optischen Lotes während der Grob-Zentrierung und -Horizontierung
Ausgangsstellung
Grobzentrierung
Grobhorizontierung
Abb. 2.32 Zentrierung mittels opti-schem Lot oder Lotlaser

2.3 Aufstellen eines geodätischen Sensors (Instrument) Seite 19
Feinhorizontierung Einspielen der Röhrenlibelle durch Drehen an den Drei-
fussschrauben, siehe Tab. 2.1 Dreifusshorizontierung mit Röhrenlibelle. Jede Drehung an den Dreifussschrauben bewirkt jedoch auch eine Schwenkung der Ziellinie des optischen Lotes / Laserlotes und damit eine entsprechende Veränderung der Zentrierung.
Feinzentrierung
Durch Verschieben des Theodolits auf dem Stativteller wird die präzise Übereinstimmung der Ziellinie des Lotes und damit der Stehachse des Theodolits mit dem Zentrum des Bodenpunktes hergestellt. Um die erforderlichen Feinbewegungen zu ermöglichen, wird die Anzugschrau-be leicht gelöst. Beim Verschieben darf der Dreifuss ge-genüber dem Stativteller jedoch nicht verdreht werden, weil sonst auf der schiefen Ebene des Stativtellers die Feinhorizontierung verloren geht.
Die Feinhorizontierung und –zentrierung sind iterativ zu wiederholen, bis die gewünschte Genauigkeit erreicht ist.
Anmerkung: Falls beim Eintreten der Stativbeine grössere Einwirkungen auf den Sensor zu erwarten sind, so ist das Abnehmen des Sensors während dieses Vorgangs zu empfehlen.
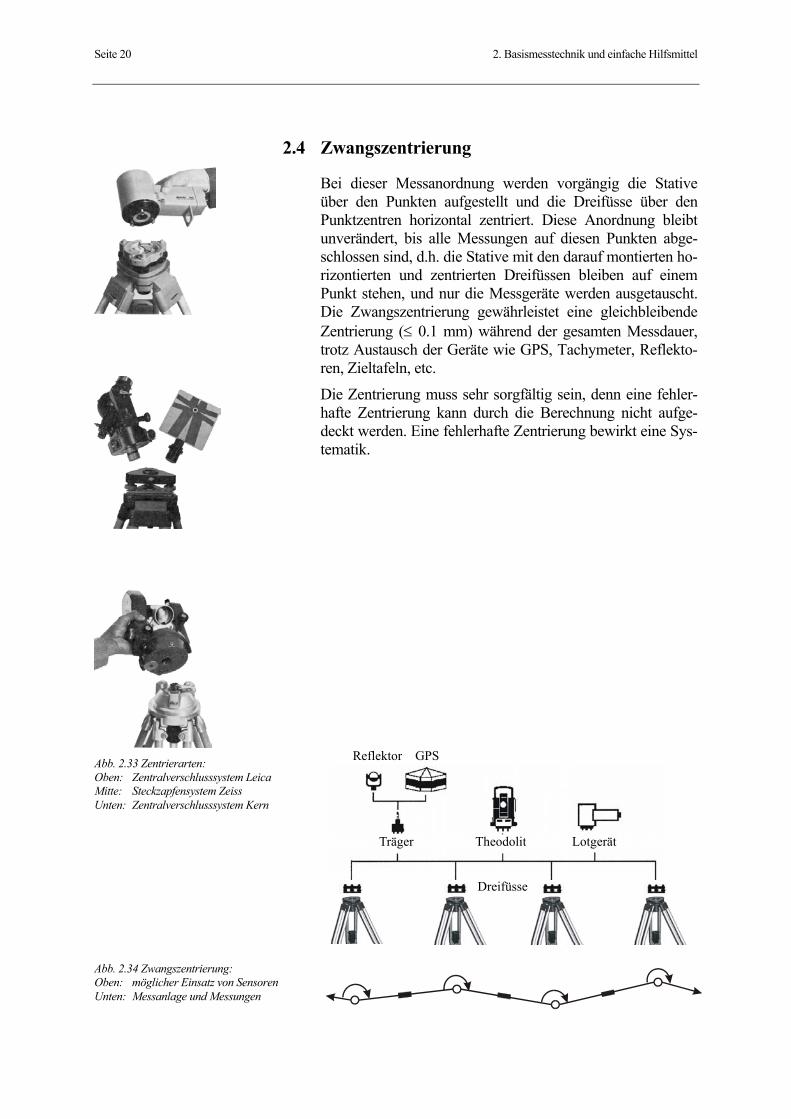
Seite 20 2. Basismesstechnik und einfache Hilfsmittel
2.4 Zwangszentrierung
Bei dieser Messanordnung werden vorgängig die Stative über den Punkten aufgestellt und die Dreifüsse über den Punktzentren horizontal zentriert. Diese Anordnung bleibt unverändert, bis alle Messungen auf diesen Punkten abge-schlossen sind, d.h. die Stative mit den darauf montierten ho-rizontierten und zentrierten Dreifüssen bleiben auf einem Punkt stehen, und nur die Messgeräte werden ausgetauscht. Die Zwangszentrierung gewährleistet eine gleichbleibende Zentrierung (≤ 0.1 mm) während der gesamten Messdauer, trotz Austausch der Geräte wie GPS, Tachymeter, Reflekto-ren, Zieltafeln, etc.
Die Zentrierung muss sehr sorgfältig sein, denn eine fehler-hafte Zentrierung kann durch die Berechnung nicht aufge-deckt werden. Eine fehlerhafte Zentrierung bewirkt eine Sys-tematik.
Abb. 2.34 Zwangszentrierung: Oben: möglicher Einsatz von Sensoren Unten: Messanlage und Messungen
Abb. 2.33 Zentrierarten: Oben: Zentralverschlusssystem Leica Mitte: Steckzapfensystem Zeiss Unten: Zentralverschlusssystem Kern
Reflektor GPS
Träger Theodolit Lotgerät
Dreifüsse
2.5 Sicherheit von Messequipen Seite 21
2.5 Sicherheit von Messequipen
Grundsätzlich ist die Messequipe abzusichern. Dazu gehört auf Strassen die vorschriftsgemässe Signalisation und das Tragen von Warnkleidung. Auf Bahnanlagen ist zusätzlich die Anwesenheit eines Bahnangestellten Bedingung. Auf Baustellen sollte die Messequipe mit Helmen ausgerüstet sein.
Weiter ist zu beachten: - Vor Messbeginn Kontakt aufnehmen mit Bahnbetreiber,
Bauführer, Bauleitung, Grundeigentümern und allgemein mit der Bauherrschaft.
- auf Bahnanlagen darf nur mit isolierten Messbändern gearbeitet werden.
- bei Anlagen mit Oberleitungen darf nur mit kurzen Nivel-lierlatten aus Holz gearbeitet werden.
Abb. 2.35 Warnweste und Triopan
„Noch einen Meter zurück bitte!“

Inhaltsverzeichnis Seite I
3. Ebenes Koordinatenrechnen
3.1 Definition des geodätischen Koordinatensystems und Bezeichnungen ......................................1
3.2 Erste Geodätische Hauptaufgabe (= polares Anhängen) .............................................................2
3.3 Zweite Geodätische Hauptaufgabe..................................................................................................3 3.3.1 Vorzeichenregel über arcus-tangens ............................................................................................3 3.3.2 Vorzeichenregel über P→R-Taste ...............................................................................................4 3.3.3 Berechnung mit EXCEL ..............................................................................................................4
3.4 Koordinatentransformation.............................................................................................................5 3.4.1 Das allgemeine Problem...............................................................................................................5 3.4.2 Grundtransformationen.................................................................................................................6
3.4.2.1 Die Translation ........................................................................................................................6 3.4.2.2 Die Rotation.............................................................................................................................6 3.4.2.3 Der Massstabsfaktor................................................................................................................7
3.4.3 Die Ähnlichkeitstransformation ...................................................................................................8 3.4.4 Die Affine Transformation .........................................................................................................10 3.4.5 Beispiele von Transformationen ................................................................................................11
Seite II Zusammenstellung der wichtigsten Formelzeichen
Zusammenstellung der wichtigsten Formelzeichen YA, XA Y- und X-Koordinaten vom Punkt A im globalen Koordinatensystem
yA, xA y- und x-Koordinaten vom Punkt A im lokalen (anderen) Koordinatensystem
∆Y, ∆X Y-, X-Koordinatendifferenz im globalen Koordinatensystem
∆y, ∆x y-, x-Koordinatendifferenz im lokalen Koordinatensystem
Az(A,B) Azimut vom Standpunkt A zum Zielpunkt B
DAB Distanz (Projektion) von A nach B
ρ Umrechnungsfaktor Bogenmass → gon
m Massstabsfaktor
ϕ Drehwinkel
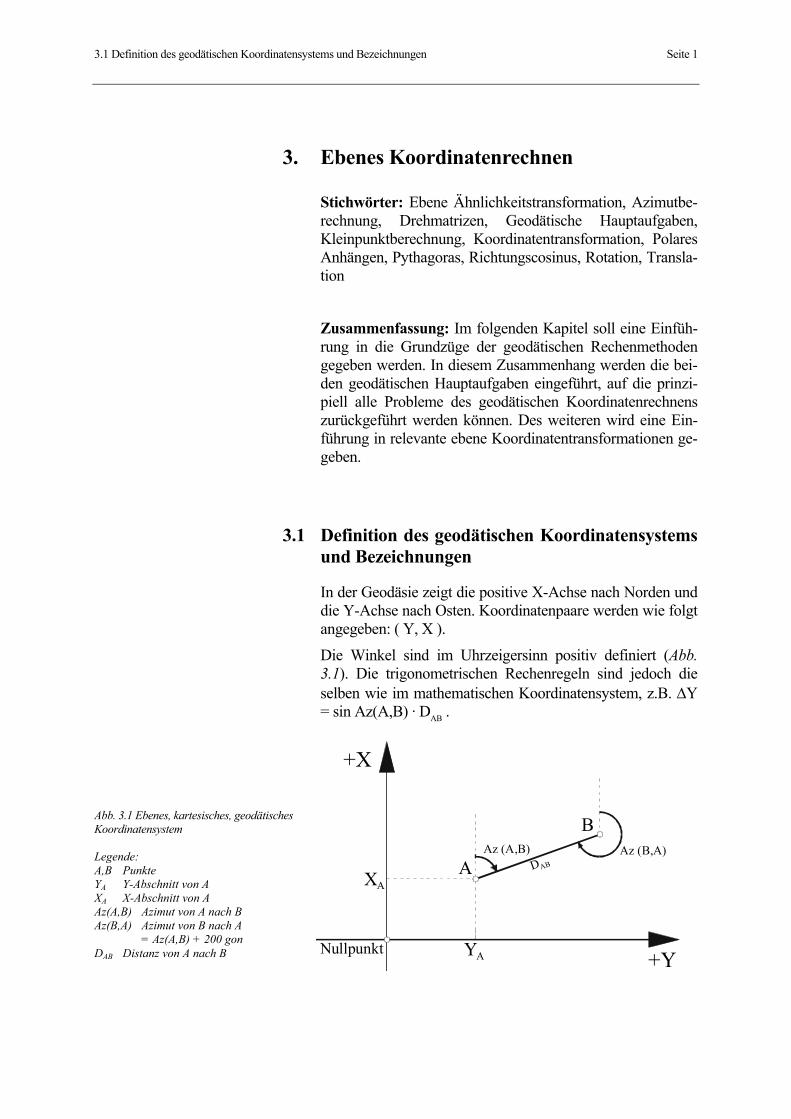
3.1 Definition des geodätischen Koordinatensystems und Bezeichnungen Seite 1
3. Ebenes Koordinatenrechnen
Stichwörter: Ebene Ähnlichkeitstransformation, Azimutbe-rechnung, Drehmatrizen, Geodätische Hauptaufgaben, Kleinpunktberechnung, Koordinatentransformation, Polares Anhängen, Pythagoras, Richtungscosinus, Rotation, Transla-tion
Zusammenfassung: Im folgenden Kapitel soll eine Einfüh-rung in die Grundzüge der geodätischen Rechenmethoden gegeben werden. In diesem Zusammenhang werden die bei-den geodätischen Hauptaufgaben eingeführt, auf die prinzi-piell alle Probleme des geodätischen Koordinatenrechnens zurückgeführt werden können. Des weiteren wird eine Ein-führung in relevante ebene Koordinatentransformationen ge-geben.
3.1 Definition des geodätischen Koordinatensystems und Bezeichnungen
In der Geodäsie zeigt die positive X-Achse nach Norden und die Y-Achse nach Osten. Koordinatenpaare werden wie folgt angegeben: ( Y, X ).
Die Winkel sind im Uhrzeigersinn positiv definiert (Abb. 3.1). Die trigonometrischen Rechenregeln sind jedoch die selben wie im mathematischen Koordinatensystem, z.B. ∆Y = sin Az(A,B) · DAB .
+Y
+X
Az (A,B)DAB
Az (B,A)A
B
XA
YANullpunkt
Abb. 3.1 Ebenes, kartesisches, geodätisches Koordinatensystem Legende: A,B Punkte YA Y-Abschnitt von A XA X-Abschnitt von A Az(A,B) Azimut von A nach B Az(B,A) Azimut von B nach A
= Az(A,B) + 200 gon DAB Distanz von A nach B

Seite 2 3. Ebenes Koordinatenrechnen
3.2 Erste Geodätische Hauptaufgabe (= polares An-hängen)
Gegeben: YA, XA
Gemessen: DAB, Az(A,B)
Gesucht: YB, XB
Mit den bekannten Koordinaten des Punktes A ergeben sich die Koordinaten des Punktes B aus:
∆∆
Y D Az A BX D Az A B
AB
AB
= ⋅= ⋅
sin ( , )cos ( , )
Y Y Y Y D Az A BB A A AB= + = + ⋅∆ sin ( , )
X X X X D Az A BB A A AB= + = + ⋅∆ cos ( , )
Gl. 3.1-1
Gl. 3.1-2
Abb. 3.2 Punktanordnung zur 1.Geodätischen Hauptaufgabe; Punkt A sowie Az(A,B) und DAB sind bekannt, gesucht ist Punkt B
Gl. 3.2-1
Gl. 3.2-2
Achtung: Richtige Vorzeichen verwenden.
X
Y
A(Y ,X )A A
B(Y ,X ) B B∆Y
∆X Az(A,B) DAB
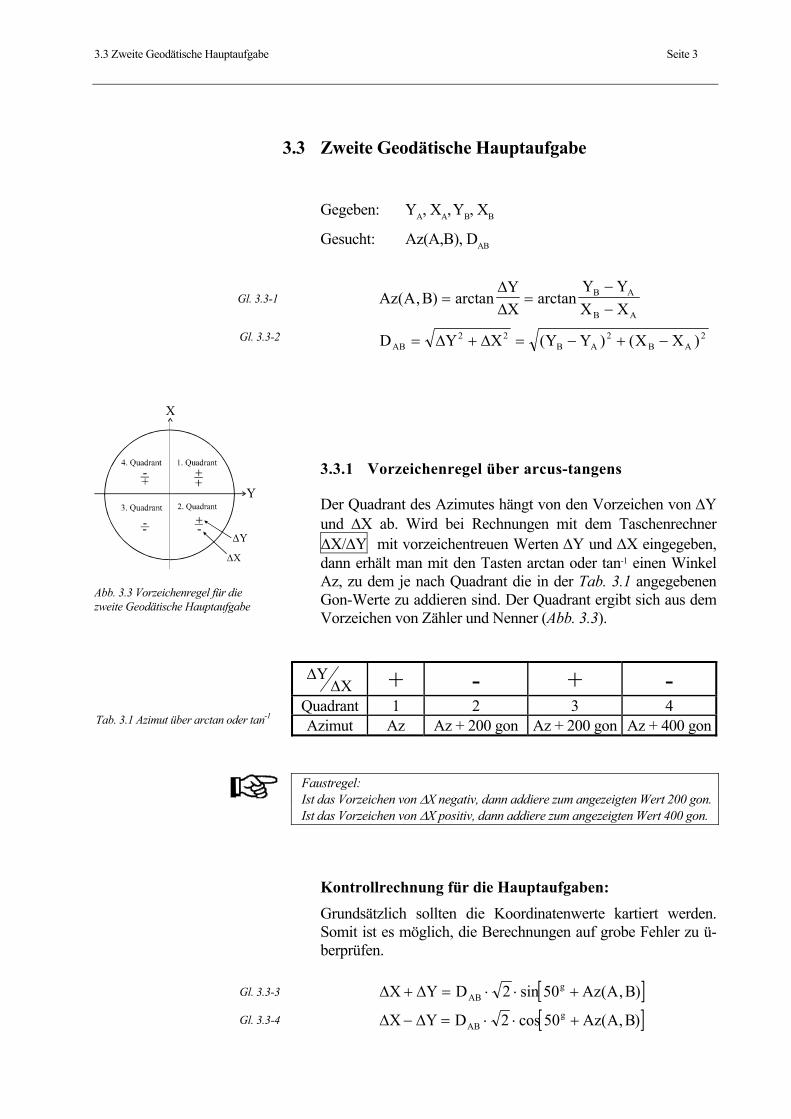
3.3 Zweite Geodätische Hauptaufgabe Seite 3
3.3 Zweite Geodätische Hauptaufgabe
Gegeben: YA, XA, YB, XB
Gesucht: Az(A,B), DAB
3.3.1 Vorzeichenregel über arcus-tangens
Der Quadrant des Azimutes hängt von den Vorzeichen von ∆Y und ∆X ab. Wird bei Rechnungen mit dem Taschenrechner ∆X/∆Y mit vorzeichentreuen Werten ∆Y und ∆X eingegeben, dann erhält man mit den Tasten arctan oder tan-1 einen Winkel Az, zu dem je nach Quadrant die in der Tab. 3.1 angegebenen Gon-Werte zu addieren sind. Der Quadrant ergibt sich aus dem Vorzeichen von Zähler und Nenner (Abb. 3.3).
XY
∆∆ + - + -
Quadrant 1 2 3 4 Azimut Az Az + 200 gon Az + 200 gon Az + 400 gon
Faustregel: Ist das Vorzeichen von ∆X negativ, dann addiere zum angezeigten Wert 200 gon. Ist das Vorzeichen von ∆X positiv, dann addiere zum angezeigten Wert 400 gon.
Kontrollrechnung für die Hauptaufgaben:
Grundsätzlich sollten die Koordinatenwerte kartiert werden. Somit ist es möglich, die Berechnungen auf grobe Fehler zu ü-berprüfen.
Az A BYX
Y YX X
B A
B A( , ) arctan arctan= =
−−
∆∆
D Y X Y Y X XAB B A B A= + = − + −∆ ∆2 2 2 2( ) ( )
X
Y
∆X
∆Y
Abb. 3.3 Vorzeichenregel für die zweite Geodätische Hauptaufgabe
Tab. 3.1 Azimut über arctan oder tan-1
[ ]∆ ∆X Y D Az A BABg+ = ⋅ ⋅ +2 50sin ( , )
[ ]∆ ∆X Y D Az A BABg− = ⋅ ⋅ +2 50cos ( , )
Gl. 3.3-1
Gl. 3.3-2
Gl. 3.3-3
Gl. 3.3-4
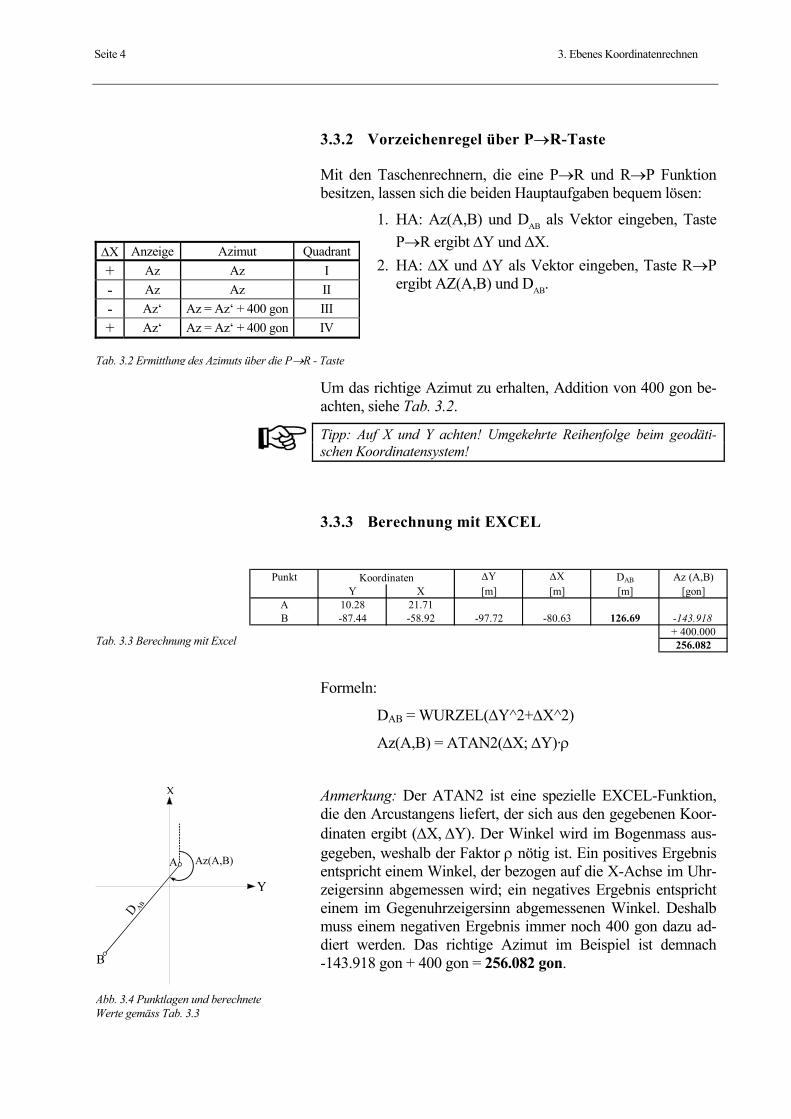
Seite 4 3. Ebenes Koordinatenrechnen
3.3.2 Vorzeichenregel über P→R-Taste
Mit den Taschenrechnern, die eine P→R und R→P Funktion besitzen, lassen sich die beiden Hauptaufgaben bequem lösen:
1. HA: Az(A,B) und DAB als Vektor eingeben, Taste P→R ergibt ∆Y und ∆X.
2. HA: ∆X und ∆Y als Vektor eingeben, Taste R→P ergibt AZ(A,B) und DAB.
Um das richtige Azimut zu erhalten, Addition von 400 gon be-achten, siehe Tab. 3.2.
Tipp: Auf X und Y achten! Umgekehrte Reihenfolge beim geodäti-schen Koordinatensystem!
3.3.3 Berechnung mit EXCEL
Formeln:
DAB = WURZEL(∆Y^2+∆X^2)
Az(A,B) = ATAN2(∆X; ∆Y)·ρ
Anmerkung: Der ATAN2 ist eine spezielle EXCEL-Funktion, die den Arcustangens liefert, der sich aus den gegebenen Koor-dinaten ergibt (∆X, ∆Y). Der Winkel wird im Bogenmass aus-gegeben, weshalb der Faktor ρ nötig ist. Ein positives Ergebnis entspricht einem Winkel, der bezogen auf die X-Achse im Uhr-zeigersinn abgemessen wird; ein negatives Ergebnis entspricht einem im Gegenuhrzeigersinn abgemessenen Winkel. Deshalb muss einem negativen Ergebnis immer noch 400 gon dazu ad-diert werden. Das richtige Azimut im Beispiel ist demnach -143.918 gon + 400 gon = 256.082 gon.
∆X Anzeige Azimut Quadrant + Az Az I - Az Az II - Az‘ Az = Az‘ + 400 gon III + Az‘ Az = Az‘ + 400 gon IV
Tab. 3.2 Ermittlung des Azimuts über die P→R - Taste
Az(A,B)
Abb. 3.4 Punktlagen und berechnete Werte gemäss Tab. 3.3
Tab. 3.3 Berechnung mit Excel
Punkt ∆Y ∆X DAB Az (A,B)Y X [m] [m] [m] [gon]
A 10.28 21.71B -87.44 -58.92 -97.72 -80.63 126.69 -143.918
+ 400.000256.082
Koordinaten
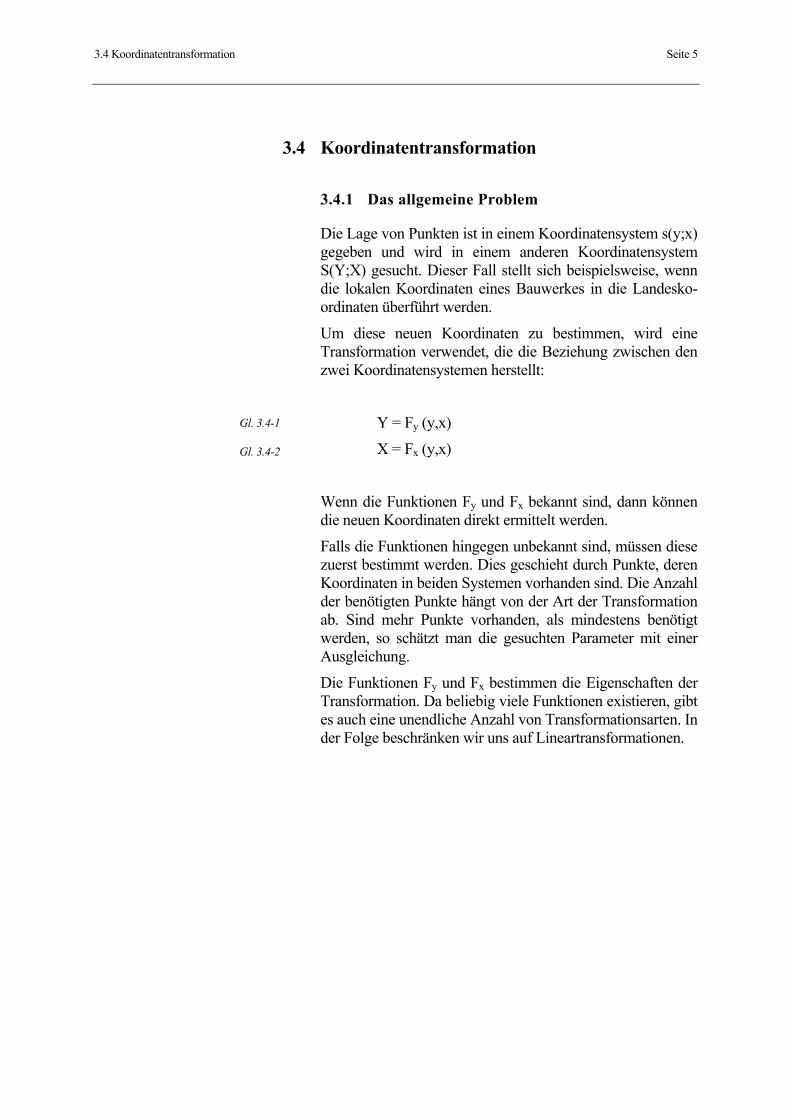
3.4 Koordinatentransformation Seite 5
3.4 Koordinatentransformation
3.4.1 Das allgemeine Problem
Die Lage von Punkten ist in einem Koordinatensystem s(y;x) gegeben und wird in einem anderen Koordinatensystem S(Y;X) gesucht. Dieser Fall stellt sich beispielsweise, wenn die lokalen Koordinaten eines Bauwerkes in die Landesko-ordinaten überführt werden.
Um diese neuen Koordinaten zu bestimmen, wird eine Transformation verwendet, die die Beziehung zwischen den zwei Koordinatensystemen herstellt:
Y = Fy (y,x)
X = Fx (y,x)
Wenn die Funktionen Fy und Fx bekannt sind, dann können die neuen Koordinaten direkt ermittelt werden.
Falls die Funktionen hingegen unbekannt sind, müssen diese zuerst bestimmt werden. Dies geschieht durch Punkte, deren Koordinaten in beiden Systemen vorhanden sind. Die Anzahl der benötigten Punkte hängt von der Art der Transformation ab. Sind mehr Punkte vorhanden, als mindestens benötigt werden, so schätzt man die gesuchten Parameter mit einer Ausgleichung.
Die Funktionen Fy und Fx bestimmen die Eigenschaften der Transformation. Da beliebig viele Funktionen existieren, gibt es auch eine unendliche Anzahl von Transformationsarten. In der Folge beschränken wir uns auf Lineartransformationen.
Gl. 3.4-1
Gl. 3.4-2
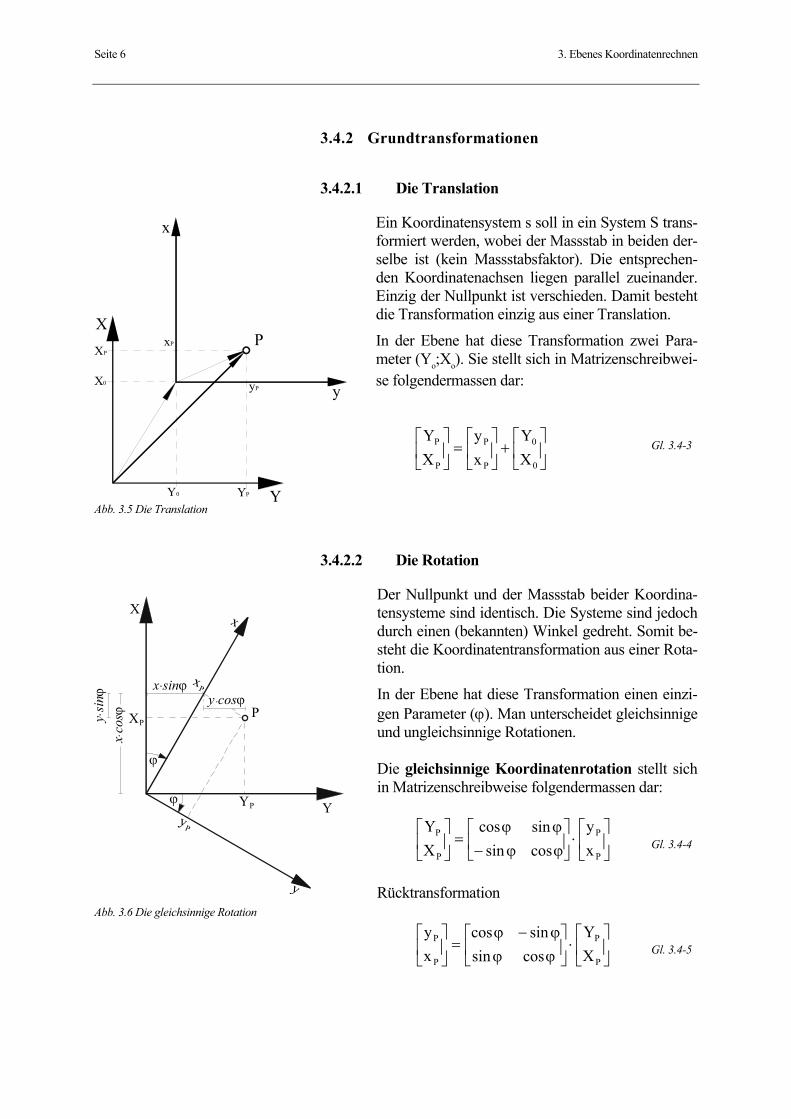
Seite 6 3. Ebenes Koordinatenrechnen
3.4.2 Grundtransformationen
3.4.2.1 Die Translation
Ein Koordinatensystem s soll in ein System S trans-formiert werden, wobei der Massstab in beiden der-selbe ist (kein Massstabsfaktor). Die entsprechen-den Koordinatenachsen liegen parallel zueinander. Einzig der Nullpunkt ist verschieden. Damit besteht die Transformation einzig aus einer Translation.
In der Ebene hat diese Transformation zwei Para-meter (Yo;Xo). Sie stellt sich in Matrizenschreibwei-se folgendermassen dar:
+
=
0
0
P
P
P
P
XY
xy
XY
3.4.2.2 Die Rotation
Der Nullpunkt und der Massstab beider Koordina-tensysteme sind identisch. Die Systeme sind jedoch durch einen (bekannten) Winkel gedreht. Somit be-steht die Koordinatentransformation aus einer Rota-tion.
In der Ebene hat diese Transformation einen einzi-gen Parameter (ϕ). Man unterscheidet gleichsinnige und ungleichsinnige Rotationen. Die gleichsinnige Koordinatenrotation stellt sich in Matrizenschreibweise folgendermassen dar:
⋅
ϕϕ−ϕϕ
=
P
P
P
P
xy
cossinsincos
XY
Rücktransformation
⋅
ϕϕϕ−ϕ
=
P
P
P
P
XY
cossinsincos
xy
P X
Y
x
X0
XPxP
yP
Y0 YP
y
Gl. 3.4-3
Gl. 3.4-4
Gl. 3.4-5
Abb. 3.5 Die Translation
Abb. 3.6 Die gleichsinnige Rotation
X
P
Y
y
x
ϕ
ϕ
x sinϕ
y si
nϕx
cosϕ
y cosϕXP
YP
Px
Py
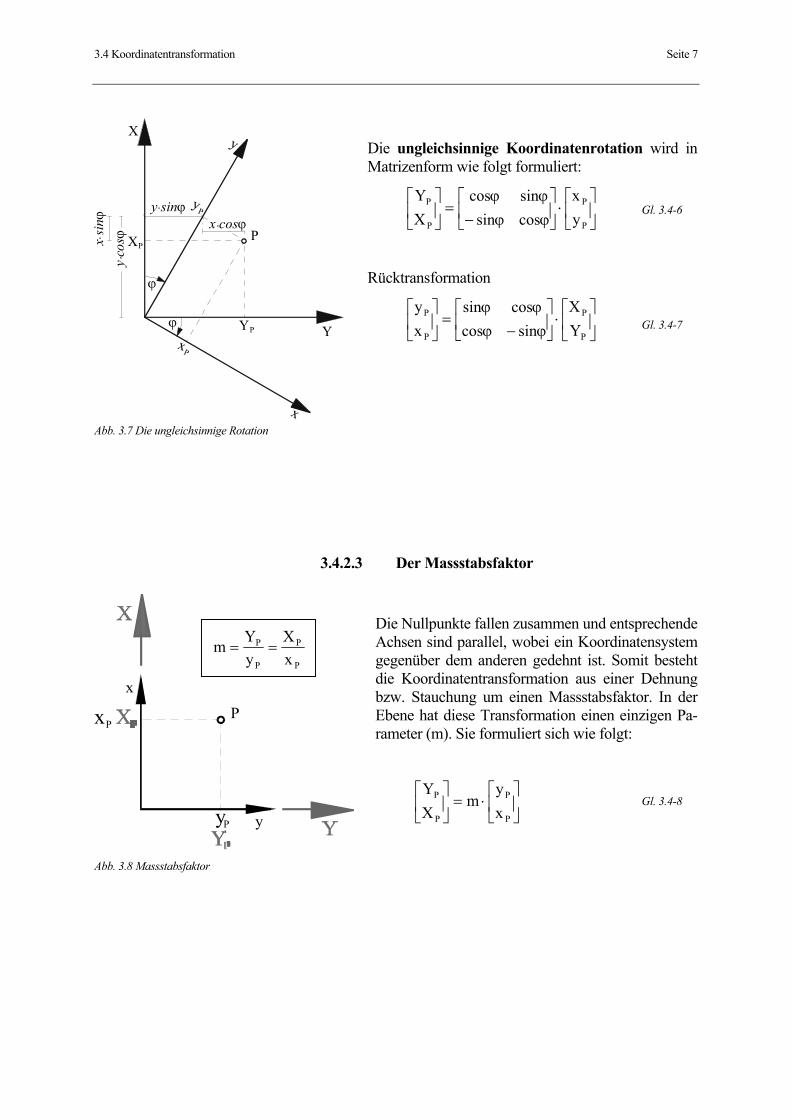
3.4 Koordinatentransformation Seite 7
Die ungleichsinnige Koordinatenrotation wird in Matrizenform wie folgt formuliert:
⋅
ϕϕ−ϕϕ
=
P
P
P
P
yx
cossinsincos
XY
Rücktransformation
⋅
ϕ−ϕ
ϕϕ=
P
P
P
P
YX
sincoscossin
xy
3.4.2.3 Der Massstabsfaktor
Die Nullpunkte fallen zusammen und entsprechende Achsen sind parallel, wobei ein Koordinatensystem gegenüber dem anderen gedehnt ist. Somit besteht die Koordinatentransformation aus einer Dehnung bzw. Stauchung um einen Massstabsfaktor. In der Ebene hat diese Transformation einen einzigen Pa-rameter (m). Sie formuliert sich wie folgt:
⋅=
P
P
P
P
xy
mXY
Abb. 3.7 Die ungleichsinnige Rotation
P
x
Px
Py y
P
P
P
P
xX
yYm ==
Abb. 3.8 Massstabsfaktor
Gl. 3.4-6
Gl. 3.4-7
Gl. 3.4-8
X
P
Y
x
y
ϕ
ϕ
y sinϕ
x si
nϕy
cosϕ
x cosϕXP
YP
Py
Px
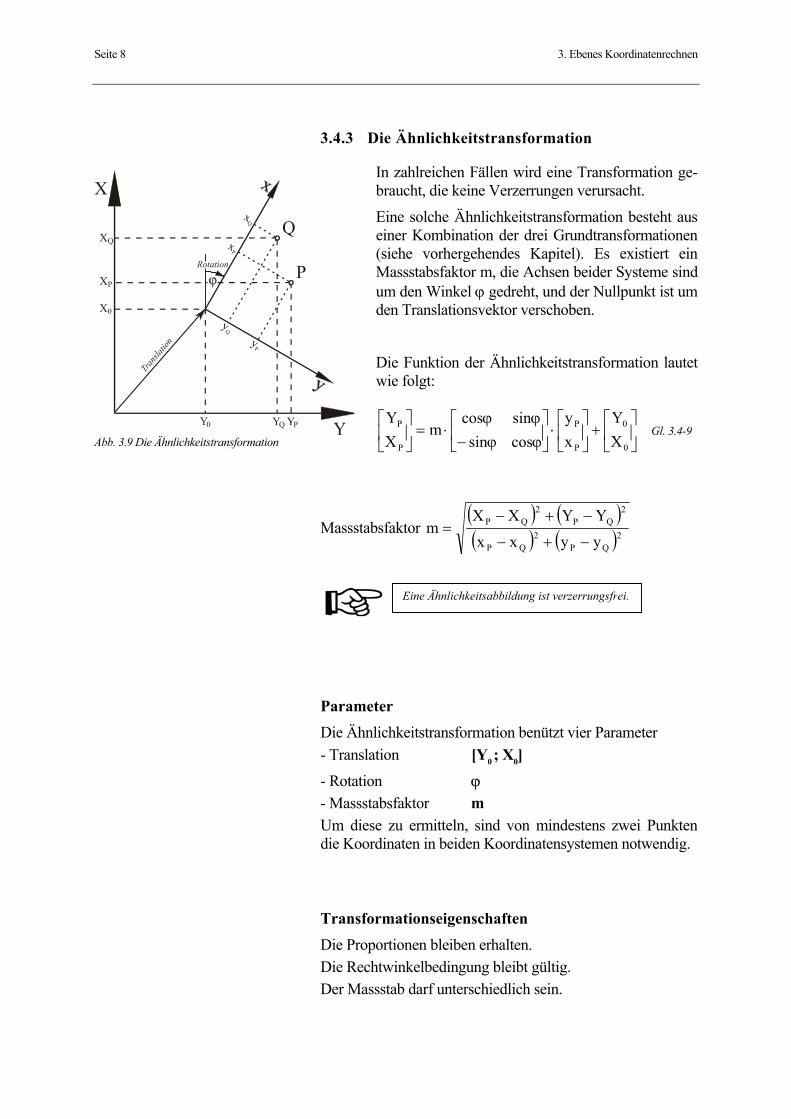
Seite 8 3. Ebenes Koordinatenrechnen
3.4.3 Die Ähnlichkeitstransformation
In zahlreichen Fällen wird eine Transformation ge-braucht, die keine Verzerrungen verursacht.
Eine solche Ähnlichkeitstransformation besteht aus einer Kombination der drei Grundtransformationen (siehe vorhergehendes Kapitel). Es existiert ein Massstabsfaktor m, die Achsen beider Systeme sind um den Winkel ϕ gedreht, und der Nullpunkt ist um den Translationsvektor verschoben.
Die Funktion der Ähnlichkeitstransformation lautet wie folgt:
+
⋅
ϕϕ−ϕϕ
⋅=
0
0
P
P
P
P
XY
xy
cossinsincos
mXY
Massstabsfaktor ( ) ( )( ) ( )2
QP2
QP
2QP
2QP
yyxx
YYXXm
−+−
−+−=
Parameter Die Ähnlichkeitstransformation benützt vier Parameter - Translation [Y0 ; X0]
- Rotation ϕ - Massstabsfaktor m Um diese zu ermitteln, sind von mindestens zwei Punkten die Koordinaten in beiden Koordinatensystemen notwendig.
Transformationseigenschaften Die Proportionen bleiben erhalten. Die Rechtwinkelbedingung bleibt gültig. Der Massstab darf unterschiedlich sein.
Abb. 3.9 Die Ähnlichkeitstransformation Gl. 3.4-9
Eine Ähnlichkeitsabbildung ist verzerrungsfrei.

3.4 Koordinatentransformation Seite 9
Rücktransformation Die Rücktransformation lautet:
−−
⋅
ϕϕϕ−ϕ
⋅=
0P
0P
P
P
XXYY
cossinsincos
m1
xy
Hinweis Die Ähnlichkeitstransformation mit 4 Parametern ist unter dem Namen “Helmert-2D” bekannt. In der Schweiz ist sie wahrscheinlich die am häufigsten gebrauchte Transformati-on.
Gl. 3.4-10
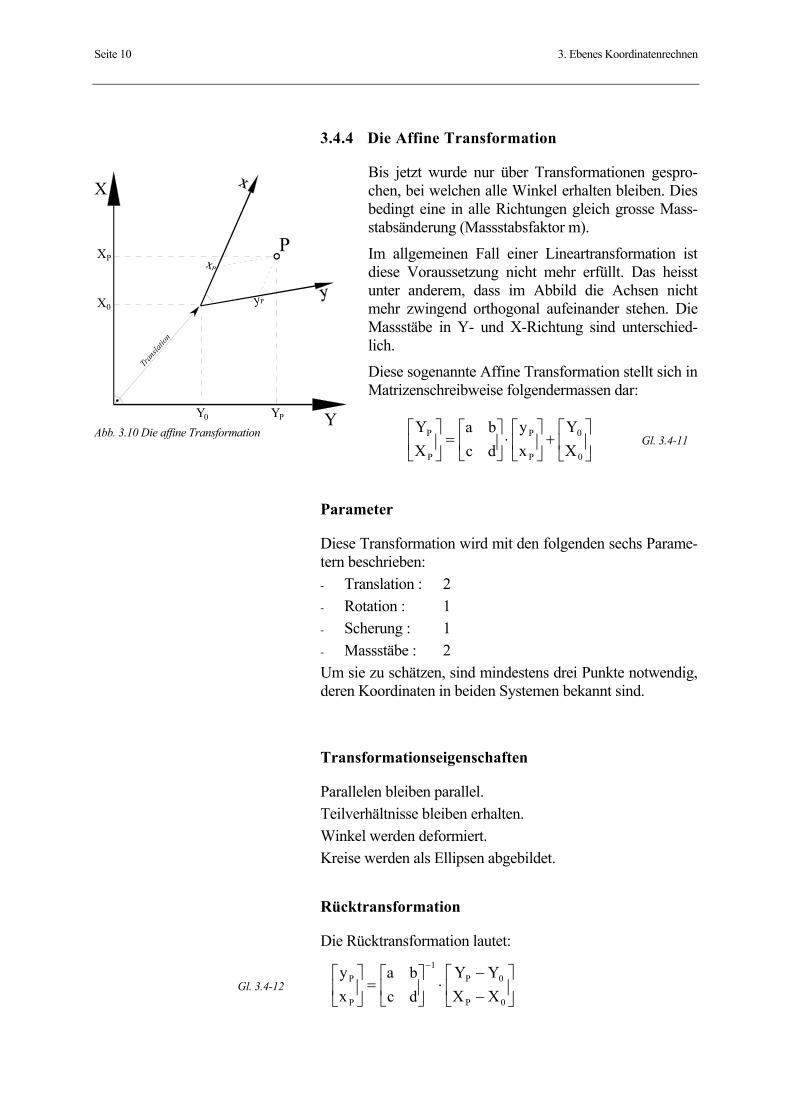
Seite 10 3. Ebenes Koordinatenrechnen
3.4.4 Die Affine Transformation
Bis jetzt wurde nur über Transformationen gespro-chen, bei welchen alle Winkel erhalten bleiben. Dies bedingt eine in alle Richtungen gleich grosse Mass-stabsänderung (Massstabsfaktor m).
Im allgemeinen Fall einer Lineartransformation ist diese Voraussetzung nicht mehr erfüllt. Das heisst unter anderem, dass im Abbild die Achsen nicht mehr zwingend orthogonal aufeinander stehen. Die Massstäbe in Y- und X-Richtung sind unterschied-lich.
Diese sogenannte Affine Transformation stellt sich in Matrizenschreibweise folgendermassen dar:
+
⋅
=
0
0
P
P
P
P
XY
xy
dcba
XY
Parameter
Diese Transformation wird mit den folgenden sechs Parame-tern beschrieben: - Translation : 2 - Rotation : 1 - Scherung : 1 - Massstäbe : 2 Um sie zu schätzen, sind mindestens drei Punkte notwendig, deren Koordinaten in beiden Systemen bekannt sind. Transformationseigenschaften
Parallelen bleiben parallel. Teilverhältnisse bleiben erhalten. Winkel werden deformiert. Kreise werden als Ellipsen abgebildet.
Rücktransformation
Die Rücktransformation lautet:
−−
⋅
=
−
0P
0P1
P
P
XXYY
dcba
xy
X
Y
Tran
slatio
n
X0
Y0
XP
YP
xP
yP
P
Abb. 3.10 Die affine Transformation Gl. 3.4-11
Gl. 3.4-12
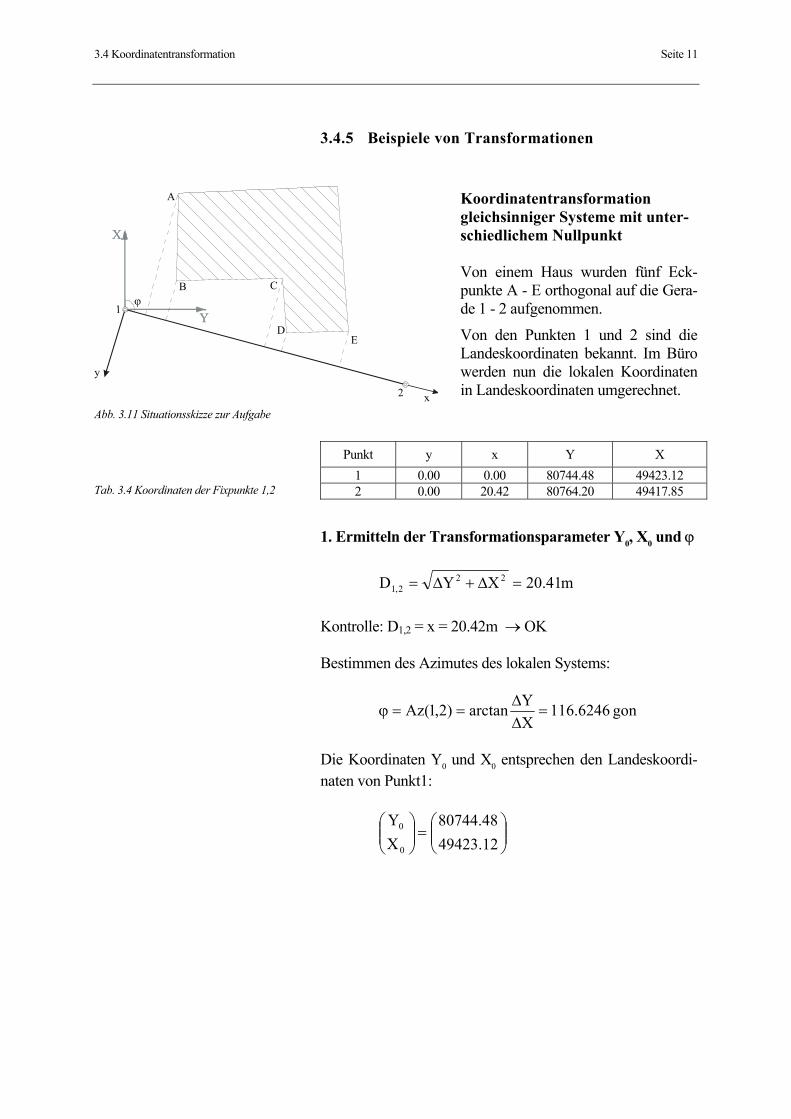
3.4 Koordinatentransformation Seite 11
3.4.5 Beispiele von Transformationen
Koordinatentransformation gleichsinniger Systeme mit unter-schiedlichem Nullpunkt Von einem Haus wurden fünf Eck-punkte A - E orthogonal auf die Gera-de 1 - 2 aufgenommen.
Von den Punkten 1 und 2 sind die Landeskoordinaten bekannt. Im Büro werden nun die lokalen Koordinaten in Landeskoordinaten umgerechnet.
Punkt y x Y X
1 0.00 0.00 80744.48 49423.12 2 0.00 20.42 80764.20 49417.85
1. Ermitteln der Transformationsparameter Y0, X0 und ϕ
m41.20XYD 222,1 =∆+∆=
Kontrolle: D1,2 = x = 20.42m → OK Bestimmen des Azimutes des lokalen Systems:
gon 6246.116XYarctan)2,1(Az =
∆∆
==ϕ
Die Koordinaten Y0 und X0 entsprechen den Landeskoordi-naten von Punkt1:
=
49423.1280744.48
XY
0
0
Abb. 3.11 Situationsskizze zur Aufgabe x
y
1
2
A
D
CB
E
ϕ
Tab. 3.4 Koordinaten der Fixpunkte 1,2
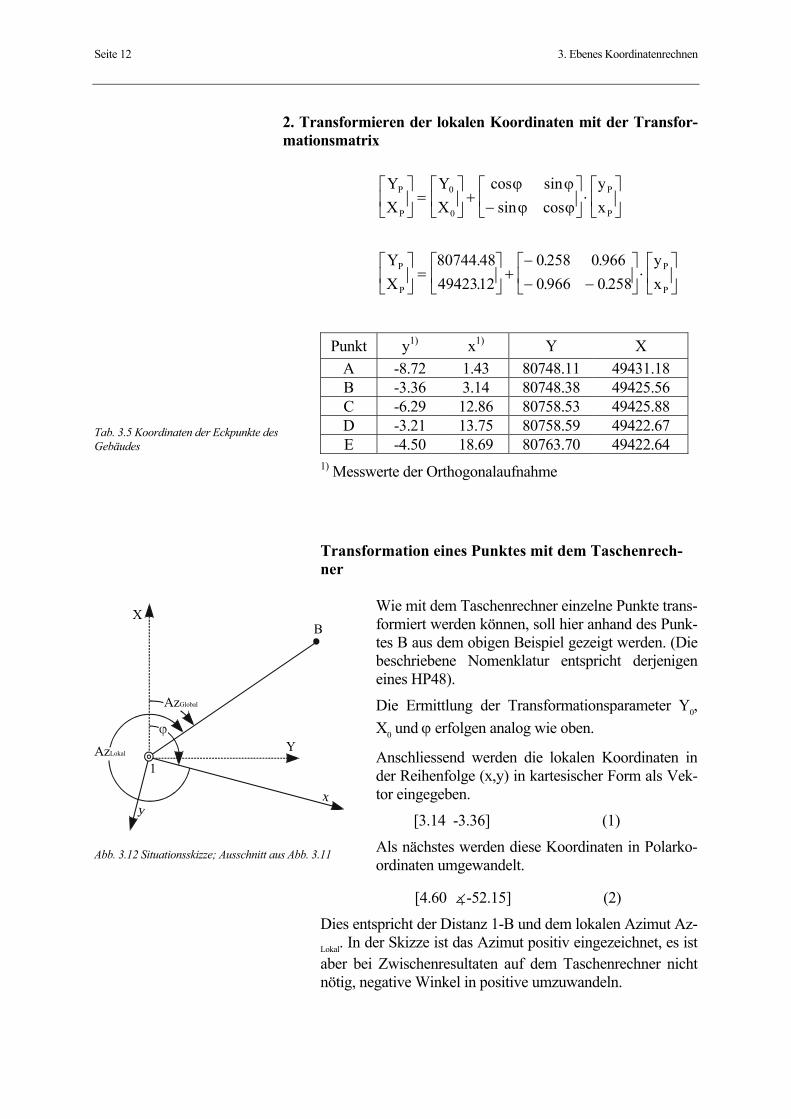
Seite 12 3. Ebenes Koordinatenrechnen
2. Transformieren der lokalen Koordinaten mit der Transfor-mationsmatrix
Punkt y1) x1) Y X A -8.72 1.43 80748.11 49431.18 B -3.36 3.14 80748.38 49425.56 C -6.29 12.86 80758.53 49425.88 D -3.21 13.75 80758.59 49422.67 E -4.50 18.69 80763.70 49422.64
1) Messwerte der Orthogonalaufnahme
Transformation eines Punktes mit dem Taschenrech-ner
Wie mit dem Taschenrechner einzelne Punkte trans-formiert werden können, soll hier anhand des Punk-tes B aus dem obigen Beispiel gezeigt werden. (Die beschriebene Nomenklatur entspricht derjenigen eines HP48).
Die Ermittlung der Transformationsparameter Y0, X0 und ϕ erfolgen analog wie oben.
Anschliessend werden die lokalen Koordinaten in der Reihenfolge (x,y) in kartesischer Form als Vek-tor eingegeben.
[3.14 -3.36] (1)
Als nächstes werden diese Koordinaten in Polarko-ordinaten umgewandelt.
[4.60 ∡-52.15] (2)
Dies entspricht der Distanz 1-B und dem lokalen Azimut Az-Lokal. In der Skizze ist das Azimut positiv eingezeichnet, es ist aber bei Zwischenresultaten auf dem Taschenrechner nicht nötig, negative Winkel in positive umzuwandeln.
YX
YX
yx
P
P
P
P
=
+
−
⋅
0
0
cos sinsin cos
ϕ ϕϕ ϕ
YX
yx
P
P
P
P
=
+
−− −
⋅
80744 484942312
0 258 0 9660 966 0 258
.
.. .. .
X
Y
xy
B
1AzLokal
AzGlobal
Abb. 3.12 Situationsskizze; Ausschnitt aus Abb. 3.11
Tab. 3.5 Koordinaten der Eckpunkte des Gebäudes
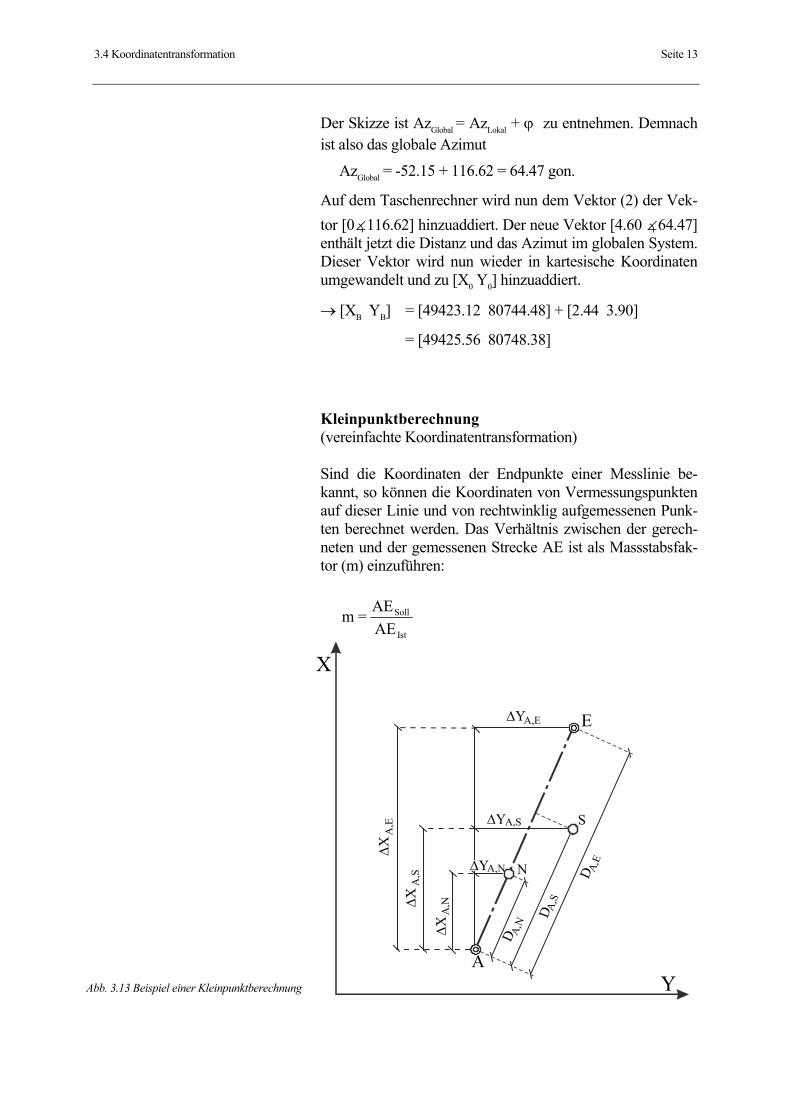
3.4 Koordinatentransformation Seite 13
Der Skizze ist AzGlobal = AzLokal + ϕ zu entnehmen. Demnach ist also das globale Azimut
AzGlobal = -52.15 + 116.62 = 64.47 gon.
Auf dem Taschenrechner wird nun dem Vektor (2) der Vek-tor [0∡116.62] hinzuaddiert. Der neue Vektor [4.60 ∡64.47] enthält jetzt die Distanz und das Azimut im globalen System. Dieser Vektor wird nun wieder in kartesische Koordinaten umgewandelt und zu [X0 Y0] hinzuaddiert.
→ [XB YB] = [49423.12 80744.48] + [2.44 3.90]
= [49425.56 80748.38]
Kleinpunktberechnung (vereinfachte Koordinatentransformation) Sind die Koordinaten der Endpunkte einer Messlinie be-kannt, so können die Koordinaten von Vermessungspunkten auf dieser Linie und von rechtwinklig aufgemessenen Punk-ten berechnet werden. Das Verhältnis zwischen der gerech-neten und der gemessenen Strecke AE ist als Massstabsfak-tor (m) einzuführen:
m = AEAE
Soll
Ist
Abb. 3.13 Beispiel einer Kleinpunktberechnung
A,N
∆Y
∆Y
A,S
A,E
∆Y
∆X
A,E
A,S
A,N
∆X
∆X
D A,E
A,S
A,N
D
D
N
S
A
E
X
Y

Inhaltsverzeichnis Seite I
4. Terrestrische Koordinatenbestimmung (Netzverdichtung)
4.1 Fixpunktfeld der Landes- und Amtlichen Vermessung ...............................................................1 4.1.1 Lagefixpunkte 1 (LFP 1) .............................................................................................................3 4.1.2 Lagefixpunkte 2 (LFP 2) .............................................................................................................3 4.1.3 Basispunkte (LFP 3)....................................................................................................................4
4.2 Fixpunktnetze der Ingenieurgeodäsie.............................................................................................6 4.2.1 Netzanlage für ein Verkehrsprojekt ............................................................................................6 4.2.2 Netzanlage für den Bau eines Gebäudekomplexes in Fertigbauweise ......................................6 4.2.3 Netzanlage für die Erstellung einer Industrieanlage...................................................................7
4.3 Terrestrische Methoden der Netzverdichtung...............................................................................8 4.3.1 Polygonometrische Bestimmungsarten ......................................................................................8
4.3.1.1 Freier Polygonzug ..............................................................................................................8 4.3.1.2 Einseitig nach Koordinaten und Richtungen angeschlossener Polygonzug.....................9 4.3.1.3 Beidseitig nach Koordinaten angeschlossener Polygonzug............................................10 4.3.1.4 Beidseitig nach Koordinaten und Richtungen angeschlossener Polygonzug.................10 4.3.1.5 Geschlossener Polygonzug oder Ringpolygon................................................................10
4.3.2 Einzelpunkteinschaltung ...........................................................................................................11 4.3.2.1 Vorwärtseinschneiden (VWS) über Richtungswinkel....................................................11 4.3.2.2 Seitwärtseinschneiden (SWS)..........................................................................................11 4.3.2.3 Geradenschnitt..................................................................................................................12 4.3.2.4 Bogenschnitt.....................................................................................................................12 4.3.2.5 Rückwärtseinschneiden (RWS).......................................................................................13 4.3.2.6 Freie Stationierung ...........................................................................................................13
4.4 Richtungs- und Winkelmessung................................................................................................... 14 4.4.1 Einleitung...................................................................................................................................14 4.4.2 Horizontale Richtungsmessung.................................................................................................14 4.4.3 Vertikalwinkelmessung.............................................................................................................16
4.5 Der Abriss........................................................................................................................................ 19 4.5.1 Einleitung...................................................................................................................................19 4.5.2 Bedeutung und Anwendung des Abrisses ................................................................................19 4.5.3 Bestimmung von orientierten Richtungen, Rechengang..........................................................21
4.6 Distanzreduktion ............................................................................................................................ 23 4.6.1 Einleitung...................................................................................................................................23 4.6.2 Zweck und Umfang der Distanzreduktion................................................................................23 4.6.3 Instrumentell bedingte Korrektionen ........................................................................................24 4.6.4 Meteorologische Korrektionen .................................................................................................24 4.6.5 Geometrische Reduktionen .......................................................................................................25
4.6.5.1 Reduktion auf Höhe Null .................................................................................................25 4.6.5.2 Reduktion der Kugeldistanz D0 in das Projektionssystem..............................................29
Seite II Inhaltsverzeichnis
4.6.6 Einfluss von Refraktion und Erdkrümmung auf die Distanzreduktion ...................................31 4.6.6.1 Distanzreduktion unter Berücksichtigung von Refraktion und Erdkrümmung .............31 4.6.6.2 Gegenseitige, gleichzeitige Zenitwinkelbeobachtung.....................................................33 4.6.6.3 Analyse des Refraktionseinflusses...................................................................................34
4.6.7 Die Horizontal- oder Schrägdistanzmessung............................................................................36 4.6.8 Die Distanzzentrierung..............................................................................................................36
4.7 Die Exzentrische Richtungsmessung............................................................................................ 38 4.7.1 Standpunktzentrierung...............................................................................................................38 4.7.2 Zielpunktzentrierung .................................................................................................................39 4.7.3 Stand- und Zielpunktzentrierung (Doppelzentrierung) ............................................................39
4.8 Angewandte Methoden der polygonometrischen Bestimmungsarten..................................... 40 4.8.1 Freier Polygonzug (Kap. 4.3.1.1)..............................................................................................40 4.8.2 Beidseitig nach Koordinaten angeschlossener Polygonzug (Kap. 4.3.1.3) .............................42
4.8.2.1 Einleitung .........................................................................................................................42 4.8.2.2 Berechnungsmodell..........................................................................................................43 4.8.2.3 Numerisches Beispiel.......................................................................................................45
4.8.3 Beidseitig nach Koordinaten und Richtungen angeschlossener Polygonzug (Kap. 4.3.1.4) ..50 4.8.4 Schlussbemerkung zu den Methoden in den Kap. 4.8.2 und 4.8.3 ..........................................53
4.9 Angewandte Methoden der Einzelpunkteinschaltung............................................................... 54 4.9.1 Vowärtseinschneiden über Richtungswinkel............................................................................54 4.9.2 Bogenschnitt ..............................................................................................................................55 4.9.3 Rückwärtseinschneiden.............................................................................................................55
4.9.3.1 Lösung nach Collins.........................................................................................................55 4.9.3.2 Lösung nach Cassini ........................................................................................................56
4.9.4 Freie Stationierung ....................................................................................................................58

Zusammenstellung der wichtigsten Formelzeichen Seite III
Zusammenstellung der wichtigsten Formelzeichen
λ Wellenlänge elektromagnetischer Strahlung
ϕ Rotationswinkel
a Additionskonstante
a, b Transformationsparameter (Kap. 4.9.4)
α, β, δ, ε, γ Winkel
ΑΕxz. Exzentrum des Zentrums A
Az(A,B) Azimut vom Standpunkt A zum Zielpunkt B
c Ausbreitungsgeschwindigkeit elektromagn. Strahlung in der Atmosphäre
c0 Ausbreitungsgeschwindigkeit elektromagn. Strahlung im Vakuum
D Distanz in der Projektionsfläche
D0 Distanz auf die Höhe Null des Bezugssystems (Kugel) reduziert
DAB Distanz von A nach B (aus Koordinaten)
dhor Horizontaldistanz (meteokorrigiert)
dm meteokorrigierte Schrägdistanz
e Distanz zwischen Exzentrum und Zentrum
Fi Fixpunkte
Hm mittlere Höhe der gemessenen Distanz
hA, hB Punkthöhe bezüglich des Referenzsystems (Erdkugel)
I Instrumentenhöhe (Theodolit oder Distanzmessgerät)
IT, ID Theodolithöhe bzw. Distanzmesserhöhe
m Massstabsfaktor
n Anzahl Vollsätze bei der Richtungsmessung (Kap. 4.4)
n Brechungsindex der Luft (Kap. 4.6)
Oi Orientierungsbetrag (Drehwinkel)
R Erdradius
Ri Richtung bzgl. Teilkreisnull
Ror orientierte Richtungen
S Signalhöhe (Zieltafel oder Reflektor)
TR Reflektorhöhe
TZ Zieltafelhöhe
v Verbesserung (Kap. 4.8.2)
vi lokale Abszissenkoordinate (Kap. 4.9.4)

Seite IV Zusammenstellung der wichtigsten Formelzeichen
vz Indexabweichung
Wα Winkelabschlussabweichung
YA, XA Landeskoordinate des Punktes A
Xm mittlere X-Koordinate (Landeskoordinaten) der gemessenen Distanz
zI, zII Zenitwinkel in erster bzw. zweiter Lage
4.1 Fixpunktfeld der Landes- und Amtlichen Vermessung Seite 1
Netz Seitenlänge [km]
I. Ordnung 30 – 50
II. Ordnung 10 – 30
III. Ordnung 3 – 5
4. Terrestrische Koordinatenbestimmung (Netzverdichtung)
Stichwörter: Abriss, Basispunkte, Distanzmessung, Distanz-reduktion, Einzelpunktbestimmung (Freie Stationierung, Ge-radenschnitt, Rückwärtseinschneiden, Vorwärtseinschnei-den), Exzentrische Messung, Fernziele, Korrektionen, Lage-fixpunkte, Messanordnung, Messprogramm, Netzanlagen, Netzplan, Netzverdichtung, Polygonometrische Bestim-mungsarten, Refraktionen, Richtungsmessung, Satzmessung (Halb-, Vollsatz), Terrestrische Methoden, Winkelmessun-gen.
Zusammenfassung: Ausgehend von einer Einführung in die Anlage der Fixpunktnetze der Landesvermessung und der Ingenieurvermessung soll die Methodik des Netzaufbaus und der Netzverdichtung erläutert werden. Eine Übersicht über die polygonometrische, punktweise und netzweise Bestim-mung von Neupunktkoordinaten schliesst daran an. Da die Fülle des Stoffes eine knappe Darstellung verlangt, sei hier besonders auf die aufgeführte weiterführende Literatur ver-wiesen. Abschliessend sind Berechnungsmethoden der Netz-verdichtung schrittweise anhand von Beispielen erklärt.
4.1 Fixpunktfeld der Landes- und Amtlichen Ver-messung
Die Lagefixpunktnetze wurden hierarchisch nach dem Ord-nungsprinzip (vgl. Kap. 1) angelegt.
Das heisst, aufbauend vom Netz I. Ordnung wurden die Netzpunkte II., III., IV. Ordnung sowie die Basispunkte ein-geschaltet.
Heute sind die Punkte I. - III. Ordnung in der praktischen Vermessung von untergeordneter Bedeutung; diese Punkte liegen in der Regel auf Bergspitzen und sind damit für die Vermessungsarbeiten weniger geeignet. Mit dem Einsatz des Globalen Positionierungs-Systems (GPS), siehe Kap. 9 "In-strumente der Geodätischen Messtechnik", wird in der gan-zen Schweiz ein neues Fixpunktnetz an geeigneten Orten er-stellt (Landesvermessung 95 = LV95). Diese Koordinaten sind im geozentrischen Koordinatensystem sowie im Lan-deskoordinatensystem bekannt.
Tab. 4.1 Netz I.-III. Ordnung

Seite 2 4. Koordinatenbestimmung
Abb. 4.1 Das schweizerische Triangulationsnetz I.-III. Ordnung. Diese Arbeiten wurden 1925 abgeschlossen
Abb. 4.2 GPS-Landesnetz LV95
Le Lieu
Bossy
EssertinesEchandens
Savigny
Chally
St. Triphon
SaanenEngstligenalp
Guggisberg
La Tour-de-TremeMoudonLa Sarraz
Col des Etroits
Travers
La Chaux-de-Fonds
Forel
Vully
Fribourg
PitonMartigny
Sion Les Hauderes
Jernen
Zermatt
Saas Fee
Simplon Crodo Dossola
Fieschertal
Ascona
Bignasco
Biasca
Dalpe
Mesocco
Sonvico
Colico
Mt. Generoso
Oberalp
GrimselJungfraujoch
ZervreilaseeAndeer
MalojaBerninapass
Zernez
DavosBonaduzBrigels
KlausenAltdorf
Glarus
SargansOberarthEinsiedeln
Fiusur
Gaster
Titlis
Brienz
BeatenbergThun
Signau Alpnach
Menzberg
Knutwil
LuegSeedorf
Langenthal
Zimm erwald
SinsChasseral
Reconvilier Riedholz
Les Rangiers
Fahy
Wartburg
LenzburgVogelbergMetzerlen Sisacherfluh
Laufenburg
HüttenChrischona
Lägern
Hönggerberg
Buchberg
Brütten Schauenberg
PfannenstielBachtel Schwägalp
Oberhelf Montlingen
Pfänder
Goldach
Stammheim
Hohentwiel
Dettigho fen
Nollen
GPS-Landesnetz LV951989 - 1992
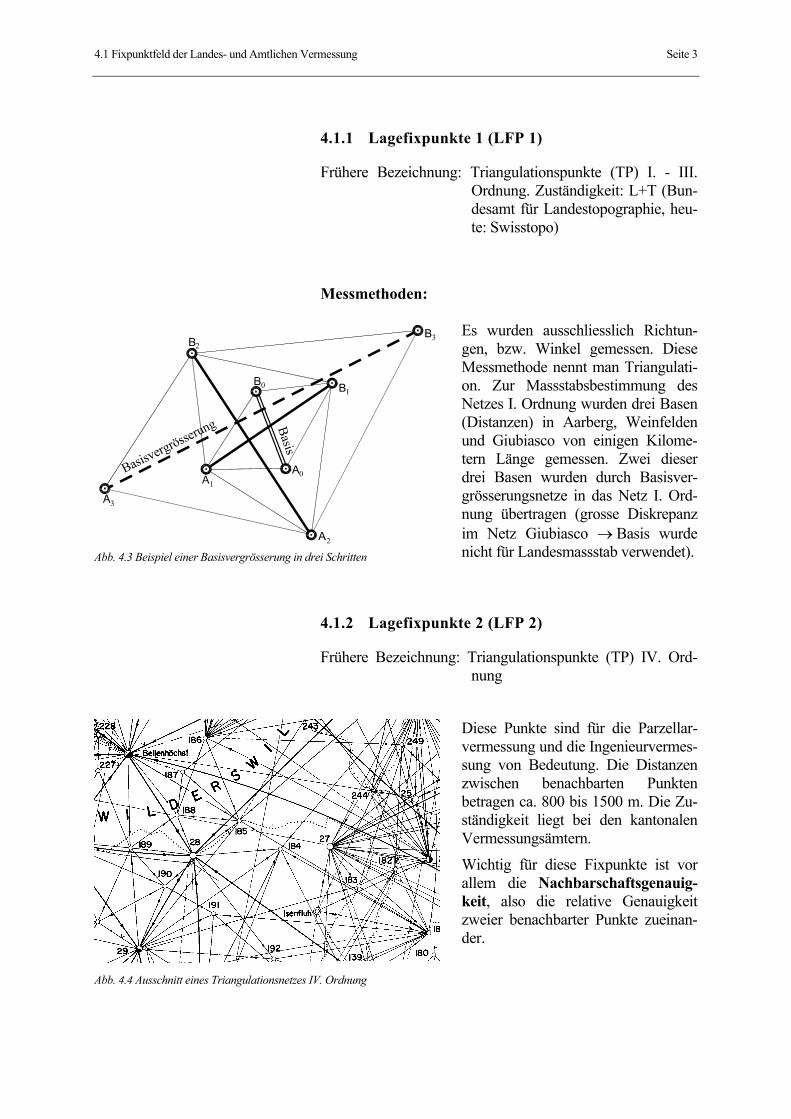
4.1 Fixpunktfeld der Landes- und Amtlichen Vermessung Seite 3
4.1.1 Lagefixpunkte 1 (LFP 1)
Frühere Bezeichnung: Triangulationspunkte (TP) I. - III. Ordnung. Zuständigkeit: L+T (Bun-desamt für Landestopographie, heu-te: Swisstopo)
Messmethoden:
Es wurden ausschliesslich Richtun-gen, bzw. Winkel gemessen. Diese Messmethode nennt man Triangulati-on. Zur Massstabsbestimmung des Netzes I. Ordnung wurden drei Basen (Distanzen) in Aarberg, Weinfelden und Giubiasco von einigen Kilome-tern Länge gemessen. Zwei dieser drei Basen wurden durch Basisver-grösserungsnetze in das Netz I. Ord-nung übertragen (grosse Diskrepanz im Netz Giubiasco → Basis wurde nicht für Landesmassstab verwendet).
4.1.2 Lagefixpunkte 2 (LFP 2)
Frühere Bezeichnung: Triangulationspunkte (TP) IV. Ord-nung
Diese Punkte sind für die Parzellar-vermessung und die Ingenieurvermes-sung von Bedeutung. Die Distanzen zwischen benachbarten Punkten betragen ca. 800 bis 1500 m. Die Zu-ständigkeit liegt bei den kantonalen Vermessungsämtern.
Wichtig für diese Fixpunkte ist vor allem die Nachbarschaftsgenauig-keit, also die relative Genauigkeit zweier benachbarter Punkte zueinan-der.
Abb. 4.3 Beispiel einer Basisvergrösserung in drei Schritten
Abb. 4.4 Ausschnitt eines Triangulationsnetzes IV. Ordnung
Seite 4 4. Koordinatenbestimmung
Messmethode: Früher: Vor der Einführung der elektronischen Distanzmes-
sung 1965 wurde für diese Netzverdichtung eine Kombination von Triangulation und Trilateration (nur Distanzmessungen) angewendet.
Heute: Die Messmethode ist frei, solange die Genauig-keitsanforderungen eingehalten werden. Vermehrt wird GPS eingesetzt.
Berechnungsmethode: Seit der Einführung der EDV erfolgt die Berechnung mit diesem Hilfsmittel, wobei hier die Bestimmungsart unter-schiedlich sein kann. Falls ganze Netze oder Netzteile neu verdichtet werden, so erfolgt die Berechnung ganzheitlich, auch bezeichnet als "in einem Guss". Die Berechnung erfolgt also "mehrpunktweise".
Bei der Neubestimmung einzelner Punkte erfolgt die Be-rechnung "einzelpunktweise".
Die Standardabweichung an den Koordinatendifferenzen be-nachbarter Punkte (Nachbargenauigkeit) beträgt ca. 3 cm.
Hier soll noch der Begriff Punkte V. Ordnung erwähnt sein. Hierbei handelt es sich um Verdichtungspunkte der Triangu-lation IV. Ordnung.
4.1.3 Basispunkte (LFP 3)
Frühere Bezeichnung: Polygonpunkte
Messmethode: Früher: Die Netzform ist polygonal (siehe Abb. 4.5) und
nicht mehr dreiecksförmig wie bei der Bestimmung der Triangulationspunkte IV. Ordnung (siehe Abb. 4.4).
Die Basispunkte wurden ausschliesslich mit Poly-gonzügen bestimmt, welche das Netz IV. Ordnung verdichteten.
Heute: Die Messmethode ist frei, solange die Genauig-keitsanforderungen eingehalten werden. In Gebieten, wo GPS nicht eingesetzt werden kann (z.B. Wald), erfolgt die Punktbestimmung für LFP3-Punkte mittels Polygonzügen.

4.1 Fixpunktfeld der Landes- und Amtlichen Vermessung Seite 5
Die Punktlagen müssen dem eigentli-chen Vermessungszweck der Amtli-chen Vermessung dienen. Demzufolge sind die Netzformen sehr unterschied-lich und werden häufig dadurch beein-flusst, dass die Züge entlang von Stras-sen verlaufen.
Falls mit Polygonzügen gearbeitet wird, so haben diese zwischen benach-barten LFP2, oder Verdichtungspunk-ten (z.B: mit GPS bestimmte Punkte) zu erfolgen. Weiterhin sind Zugverkno-tungen anzustreben, um eine gute Nachbarschaftsgenauigkeit zu errei-chen.
Auf den Anschluss- und Knotenpunkten sind die Richtungen zu allen Nachbarpunkten und Fernzielen (nur bei homogenen Netzen) zu messen, auf den weiteren Polygonpunkten die Brechungswinkel. Zur Steigerung der Zuverlässigkeit sind je nach Möglichkeit auch von den Polygonpunkten einzelne Anschlussvisuren zu beobachten. Für die Distanzmessung gilt die gleiche Anordnung, wobei die Distanzen zu den Fernzielen in der Regel nicht gemessen werden.
Berechnungsmethode: Falls die Punktkoordinaten für ein ganzes Polygonnetz zu bestimmen sind, so erfolgt die Berechnung gesamthaft für al-le Punkte in einem Guss. Falls die Punktkoordinaten nur für einen Zug zu bestimmen sind, so erfolgt die Berechnung mit der sogenannten "Polygonzugberechnung". Allgemeine Ge-nauigkeitsbetrachtungen werden in Kap. 6 behandelt und ü-ber die Genauigkeitsanforderungen in der Amtlichen Ver-messung wird in Kap. 7.5.2 berichtet.
Punkte LFP 2
Basispunkte LFP 3
LFP 3 (Knotenpunkte)
500 m
Abb. 4.5 Schematische Netzform in der Amtlichen Vermessung
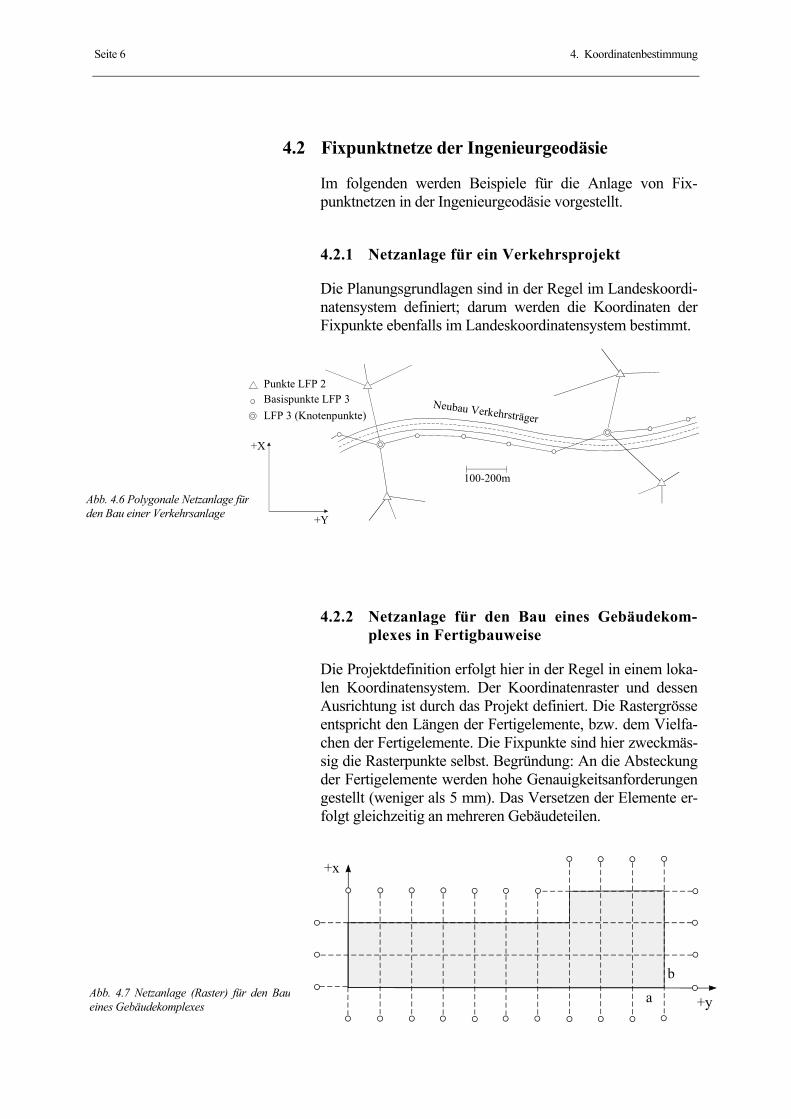
Seite 6 4. Koordinatenbestimmung
4.2 Fixpunktnetze der Ingenieurgeodäsie
Im folgenden werden Beispiele für die Anlage von Fix-punktnetzen in der Ingenieurgeodäsie vorgestellt.
4.2.1 Netzanlage für ein Verkehrsprojekt
Die Planungsgrundlagen sind in der Regel im Landeskoordi-natensystem definiert; darum werden die Koordinaten der Fixpunkte ebenfalls im Landeskoordinatensystem bestimmt.
4.2.2 Netzanlage für den Bau eines Gebäudekom-plexes in Fertigbauweise
Die Projektdefinition erfolgt hier in der Regel in einem loka-len Koordinatensystem. Der Koordinatenraster und dessen Ausrichtung ist durch das Projekt definiert. Die Rastergrösse entspricht den Längen der Fertigelemente, bzw. dem Vielfa-chen der Fertigelemente. Die Fixpunkte sind hier zweckmäs-sig die Rasterpunkte selbst. Begründung: An die Absteckung der Fertigelemente werden hohe Genauigkeitsanforderungen gestellt (weniger als 5 mm). Das Versetzen der Elemente er-folgt gleichzeitig an mehreren Gebäudeteilen.
Abb. 4.6 Polygonale Netzanlage fürden Bau einer Verkehrsanlage
Abb. 4.7 Netzanlage (Raster) für den Baueines Gebäudekomplexes
Neubau Verkehrsträger
100-200m
+Y
+X
Punkte LFP 2Basispunkte LFP 3LFP 3 (Knotenpunkte)
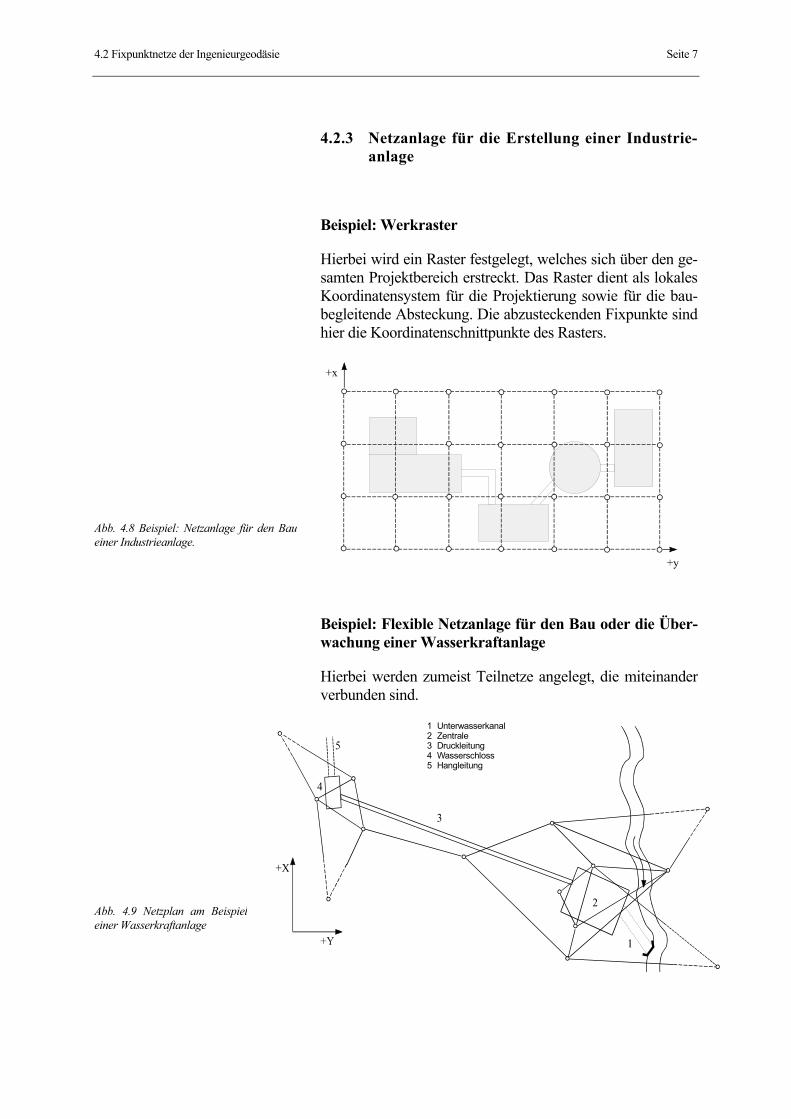
4.2 Fixpunktnetze der Ingenieurgeodäsie Seite 7
4.2.3 Netzanlage für die Erstellung einer Industrie-anlage
Beispiel: Werkraster
Hierbei wird ein Raster festgelegt, welches sich über den ge-samten Projektbereich erstreckt. Das Raster dient als lokales Koordinatensystem für die Projektierung sowie für die bau-begleitende Absteckung. Die abzusteckenden Fixpunkte sind hier die Koordinatenschnittpunkte des Rasters.
Beispiel: Flexible Netzanlage für den Bau oder die Über-wachung einer Wasserkraftanlage
Hierbei werden zumeist Teilnetze angelegt, die miteinander verbunden sind.
12345
UnterwasserkanalZentraleDruckleitungWasserschlossHangleitung
Abb. 4.8 Beispiel: Netzanlage für den Baueiner Industrieanlage.
Abb. 4.9 Netzplan am Beispieleiner Wasserkraftanlage
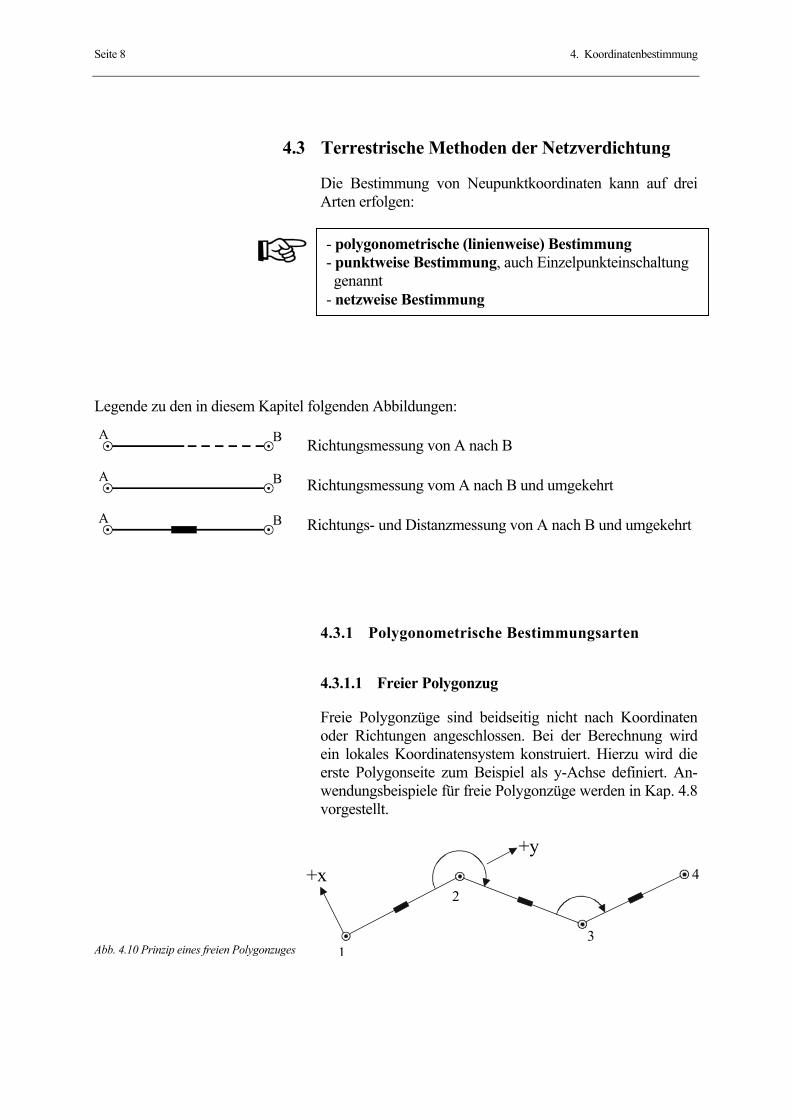
Seite 8 4. Koordinatenbestimmung
4.3 Terrestrische Methoden der Netzverdichtung
Die Bestimmung von Neupunktkoordinaten kann auf drei Arten erfolgen:
Richtungsmessung von A nach B Richtungsmessung vom A nach B und umgekehrt Richtungs- und Distanzmessung von A nach B und umgekehrt
4.3.1 Polygonometrische Bestimmungsarten
4.3.1.1 Freier Polygonzug
Freie Polygonzüge sind beidseitig nicht nach Koordinaten oder Richtungen angeschlossen. Bei der Berechnung wird ein lokales Koordinatensystem konstruiert. Hierzu wird die erste Polygonseite zum Beispiel als y-Achse definiert. An-wendungsbeispiele für freie Polygonzüge werden in Kap. 4.8 vorgestellt.
Abb. 4.10 Prinzip eines freien Polygonzuges 1
2
3
4+x+y
- polygonometrische (linienweise) Bestimmung - punktweise Bestimmung, auch Einzelpunkteinschaltung genannt - netzweise Bestimmung
Legende zu den in diesem Kapitel folgenden Abbildungen:
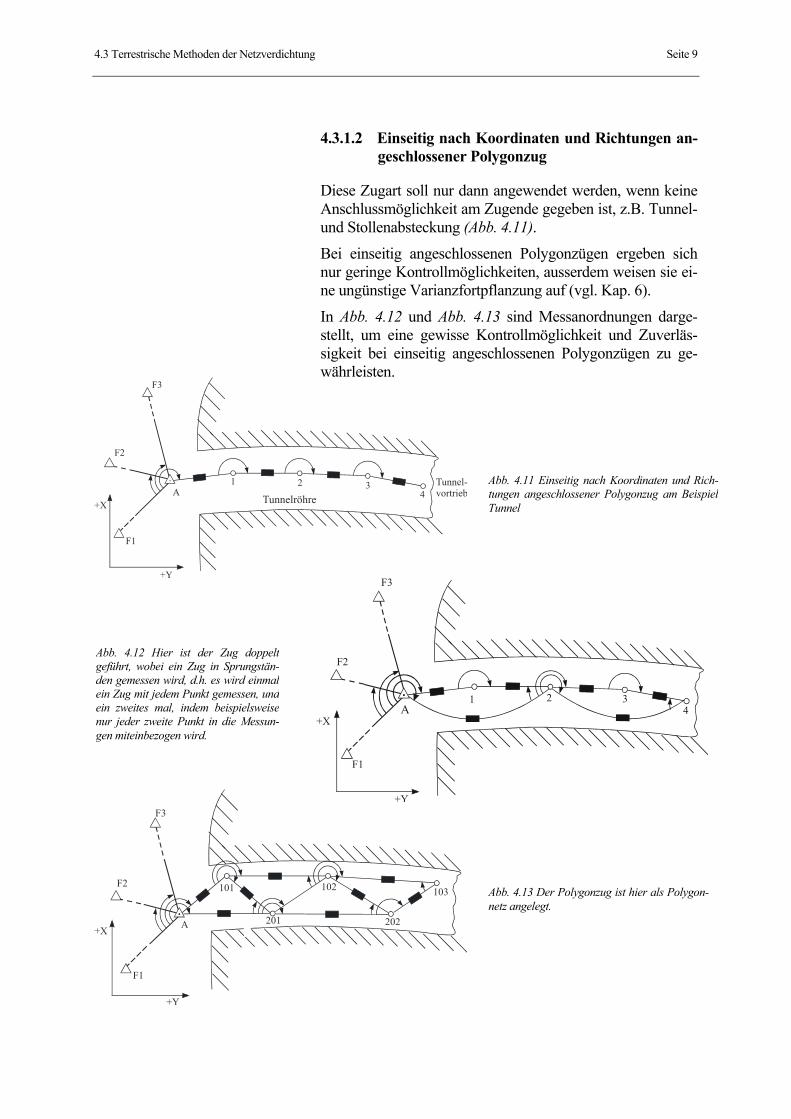
4.3 Terrestrische Methoden der Netzverdichtung Seite 9
4.3.1.2 Einseitig nach Koordinaten und Richtungen an-geschlossener Polygonzug
Diese Zugart soll nur dann angewendet werden, wenn keine Anschlussmöglichkeit am Zugende gegeben ist, z.B. Tunnel- und Stollenabsteckung (Abb. 4.11).
Bei einseitig angeschlossenen Polygonzügen ergeben sich nur geringe Kontrollmöglichkeiten, ausserdem weisen sie ei-ne ungünstige Varianzfortpflanzung auf (vgl. Kap. 6).
In Abb. 4.12 und Abb. 4.13 sind Messanordnungen darge-stellt, um eine gewisse Kontrollmöglichkeit und Zuverläs-sigkeit bei einseitig angeschlossenen Polygonzügen zu ge-währleisten.
Abb. 4.11 Einseitig nach Koordinaten und Rich-tungen angeschlossener Polygonzug am BeispielTunnel
Abb. 4.12 Hier ist der Zug doppeltgeführt, wobei ein Zug in Sprungstän-den gemessen wird, d.h. es wird einmalein Zug mit jedem Punkt gemessen, undein zweites mal, indem beispielsweise nur jeder zweite Punkt in die Messun-gen miteinbezogen wird.
Abb. 4.13 Der Polygonzug ist hier als Polygon-netz angelegt.
TunnelröhreTunnel-vortrieb
+Y
+X
F3
F2
F1
A1 2 3
4
+Y
+X
1 2 34
F3
F2
F1
A
F3
F2
F1
+Y
+X A
101
201
102
202
103
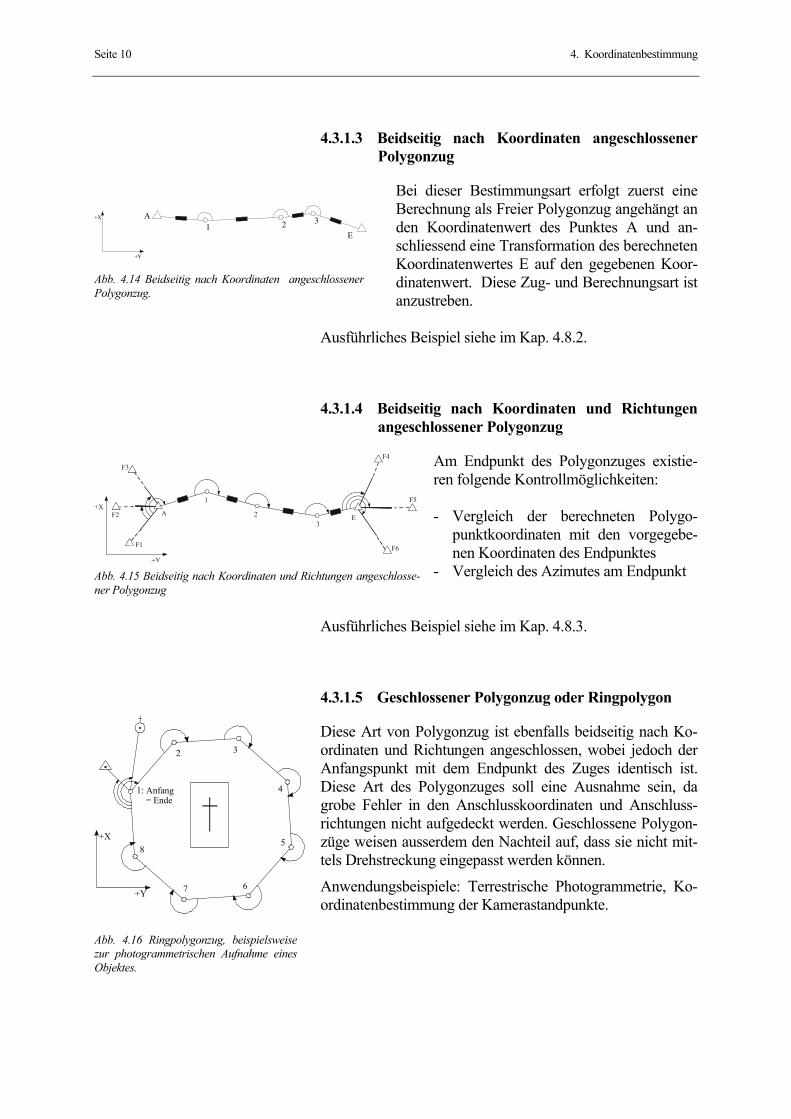
Seite 10 4. Koordinatenbestimmung
4.3.1.3 Beidseitig nach Koordinaten angeschlossener Polygonzug
Bei dieser Bestimmungsart erfolgt zuerst eine Berechnung als Freier Polygonzug angehängt an den Koordinatenwert des Punktes A und an-schliessend eine Transformation des berechneten Koordinatenwertes E auf den gegebenen Koor-dinatenwert. Diese Zug- und Berechnungsart ist anzustreben.
Ausführliches Beispiel siehe im Kap. 4.8.2.
4.3.1.4 Beidseitig nach Koordinaten und Richtungen angeschlossener Polygonzug
Am Endpunkt des Polygonzuges existie-ren folgende Kontrollmöglichkeiten: - Vergleich der berechneten Polygo-
punktkoordinaten mit den vorgegebe-nen Koordinaten des Endpunktes
- Vergleich des Azimutes am Endpunkt
Ausführliches Beispiel siehe im Kap. 4.8.3.
4.3.1.5 Geschlossener Polygonzug oder Ringpolygon
Diese Art von Polygonzug ist ebenfalls beidseitig nach Ko-ordinaten und Richtungen angeschlossen, wobei jedoch der Anfangspunkt mit dem Endpunkt des Zuges identisch ist. Diese Art des Polygonzuges soll eine Ausnahme sein, da grobe Fehler in den Anschlusskoordinaten und Anschluss-richtungen nicht aufgedeckt werden. Geschlossene Polygon-züge weisen ausserdem den Nachteil auf, dass sie nicht mit-tels Drehstreckung eingepasst werden können.
Anwendungsbeispiele: Terrestrische Photogrammetrie, Ko-ordinatenbestimmung der Kamerastandpunkte.
+ X
+ Y
A
E1 2 3
Abb. 4.14 Beidseitig nach Koordinaten angeschlossenerPolygonzug.
+X
+Y
1: Anfang = Ende
2 3
4
5
67
8
Abb. 4.16 Ringpolygonzug, beispielsweisezur photogrammetrischen Aufnahme einesObjektes.
F4
F5
F6
32
1
F3
F2
F1
+Y
+XA E
Abb. 4.15 Beidseitig nach Koordinaten und Richtungen angeschlosse-ner Polygonzug
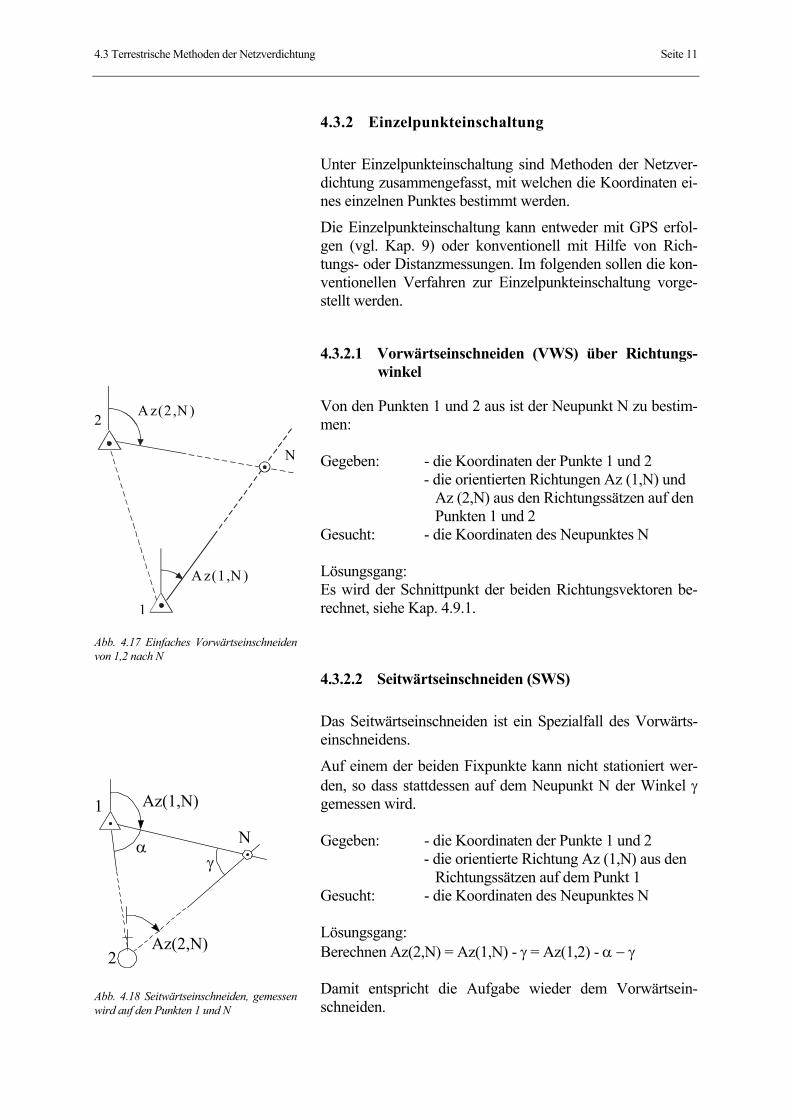
4.3 Terrestrische Methoden der Netzverdichtung Seite 11
4.3.2 Einzelpunkteinschaltung
Unter Einzelpunkteinschaltung sind Methoden der Netzver-dichtung zusammengefasst, mit welchen die Koordinaten ei-nes einzelnen Punktes bestimmt werden.
Die Einzelpunkteinschaltung kann entweder mit GPS erfol-gen (vgl. Kap. 9) oder konventionell mit Hilfe von Rich-tungs- oder Distanzmessungen. Im folgenden sollen die kon-ventionellen Verfahren zur Einzelpunkteinschaltung vorge-stellt werden.
4.3.2.1 Vorwärtseinschneiden (VWS) über Richtungs-winkel
Von den Punkten 1 und 2 aus ist der Neupunkt N zu bestim-men: Gegeben: - die Koordinaten der Punkte 1 und 2
- die orientierten Richtungen Az (1,N) und Az (2,N) aus den Richtungssätzen auf den Punkten 1 und 2
Gesucht: - die Koordinaten des Neupunktes N Lösungsgang: Es wird der Schnittpunkt der beiden Richtungsvektoren be-rechnet, siehe Kap. 4.9.1.
4.3.2.2 Seitwärtseinschneiden (SWS)
Das Seitwärtseinschneiden ist ein Spezialfall des Vorwärts-einschneidens.
Auf einem der beiden Fixpunkte kann nicht stationiert wer-den, so dass stattdessen auf dem Neupunkt N der Winkel γ gemessen wird. Gegeben: - die Koordinaten der Punkte 1 und 2
- die orientierte Richtung Az (1,N) aus den Richtungssätzen auf dem Punkt 1
Gesucht: - die Koordinaten des Neupunktes N Lösungsgang: Berechnen Az(2,N) = Az(1,N) - γ = Az(1,2) - α − γ Damit entspricht die Aufgabe wieder dem Vorwärtsein-schneiden.
Abb. 4.17 Einfaches Vorwärtseinschneidenvon 1,2 nach N
Abb. 4.18 Seitwärtseinschneiden, gemessenwird auf den Punkten 1 und N
1
2
N
Az(1,N)
Az(2,N)
αγ
A z(2,N )
N
2
1
A z(1,N )
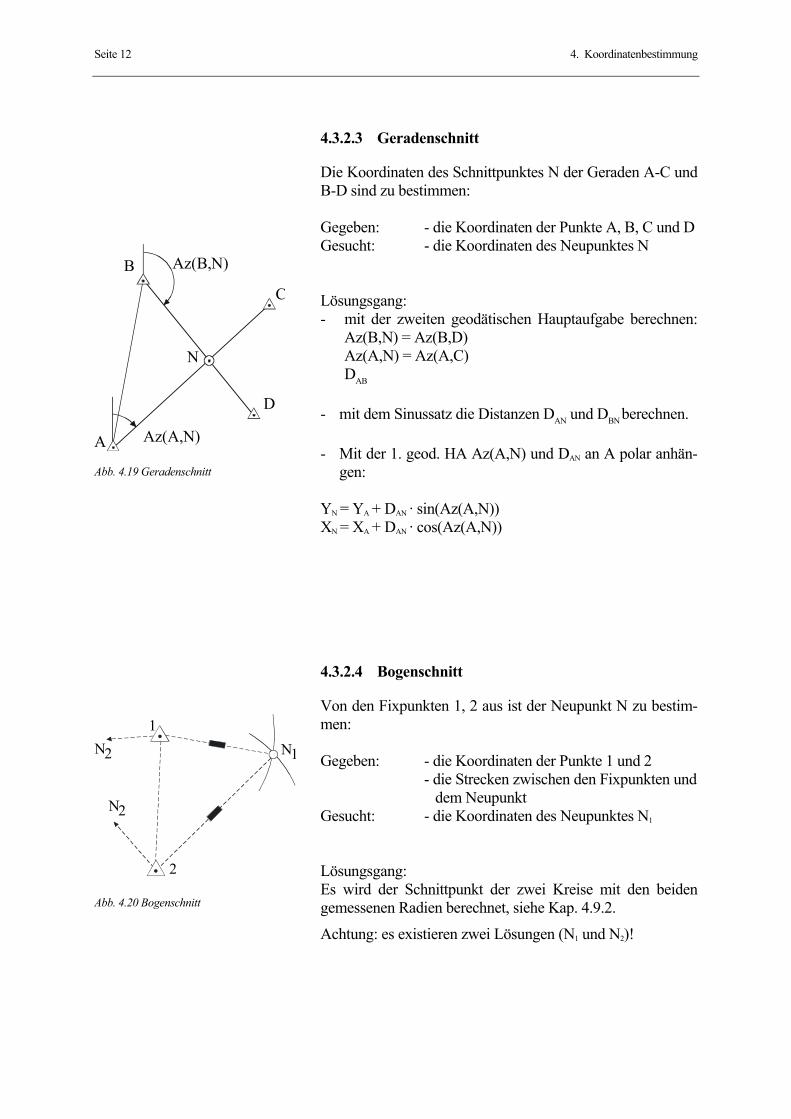
Seite 12 4. Koordinatenbestimmung
4.3.2.3 Geradenschnitt
Die Koordinaten des Schnittpunktes N der Geraden A-C und B-D sind zu bestimmen: Gegeben: - die Koordinaten der Punkte A, B, C und D Gesucht: - die Koordinaten des Neupunktes N Lösungsgang: - mit der zweiten geodätischen Hauptaufgabe berechnen:
Az(B,N) = Az(B,D) Az(A,N) = Az(A,C) DAB
- mit dem Sinussatz die Distanzen DAN und DBN berechnen. - Mit der 1. geod. HA Az(A,N) und DAN an A polar anhän-
gen: YN = YA + DAN · sin(Az(A,N)) XN = XA + DAN · cos(Az(A,N))
4.3.2.4 Bogenschnitt
Von den Fixpunkten 1, 2 aus ist der Neupunkt N zu bestim-men: Gegeben: - die Koordinaten der Punkte 1 und 2 - die Strecken zwischen den Fixpunkten und
dem Neupunkt Gesucht: - die Koordinaten des Neupunktes N1 Lösungsgang: Es wird der Schnittpunkt der zwei Kreise mit den beiden gemessenen Radien berechnet, siehe Kap. 4.9.2.
Achtung: es existieren zwei Lösungen (N1 und N2)!
Abb. 4.19 Geradenschnitt
A
B
C
D
N
Az(A,N)
Az(B,N)
1
2
N12N
2N
Abb. 4.20 Bogenschnitt
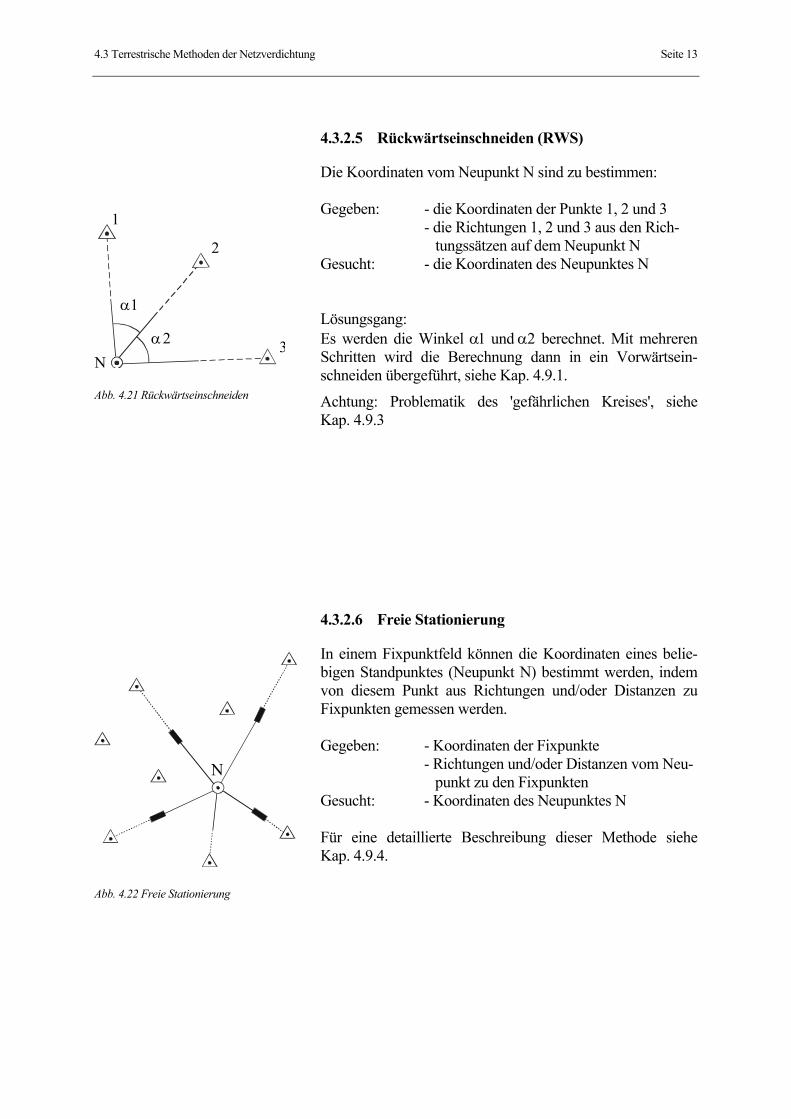
4.3 Terrestrische Methoden der Netzverdichtung Seite 13
4.3.2.5 Rückwärtseinschneiden (RWS)
Die Koordinaten vom Neupunkt N sind zu bestimmen: Gegeben: - die Koordinaten der Punkte 1, 2 und 3
- die Richtungen 1, 2 und 3 aus den Rich- tungssätzen auf dem Neupunkt N
Gesucht: - die Koordinaten des Neupunktes N Lösungsgang: Es werden die Winkel α1 und α2 berechnet. Mit mehreren Schritten wird die Berechnung dann in ein Vorwärtsein-schneiden übergeführt, siehe Kap. 4.9.1.
Achtung: Problematik des 'gefährlichen Kreises', siehe Kap. 4.9.3
4.3.2.6 Freie Stationierung
In einem Fixpunktfeld können die Koordinaten eines belie-bigen Standpunktes (Neupunkt N) bestimmt werden, indem von diesem Punkt aus Richtungen und/oder Distanzen zu Fixpunkten gemessen werden. Gegeben: - Koordinaten der Fixpunkte - Richtungen und/oder Distanzen vom Neu-
punkt zu den Fixpunkten Gesucht: - Koordinaten des Neupunktes N Für eine detaillierte Beschreibung dieser Methode siehe Kap. 4.9.4.
Abb. 4.21 Rückwärtseinschneiden
Abb. 4.22 Freie Stationierung
N
α1
α2
1
2
3N
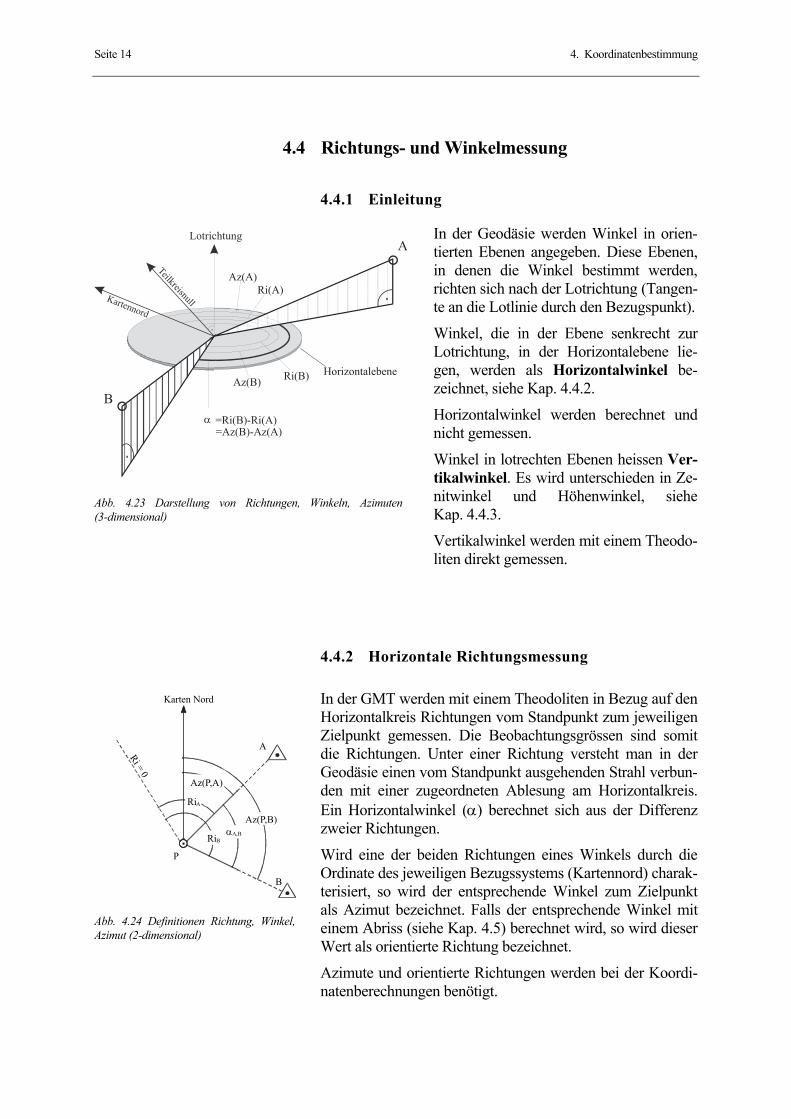
Seite 14 4. Koordinatenbestimmung
Abb. 4.24 Definitionen Richtung, Winkel,Azimut (2-dimensional)
4.4 Richtungs- und Winkelmessung
4.4.1 Einleitung
In der Geodäsie werden Winkel in orien-tierten Ebenen angegeben. Diese Ebenen, in denen die Winkel bestimmt werden, richten sich nach der Lotrichtung (Tangen-te an die Lotlinie durch den Bezugspunkt).
Winkel, die in der Ebene senkrecht zur Lotrichtung, in der Horizontalebene lie-gen, werden als Horizontalwinkel be-zeichnet, siehe Kap. 4.4.2.
Horizontalwinkel werden berechnet und nicht gemessen.
Winkel in lotrechten Ebenen heissen Ver-tikalwinkel. Es wird unterschieden in Ze-nitwinkel und Höhenwinkel, siehe Kap. 4.4.3.
Vertikalwinkel werden mit einem Theodo-liten direkt gemessen.
4.4.2 Horizontale Richtungsmessung
In der GMT werden mit einem Theodoliten in Bezug auf den Horizontalkreis Richtungen vom Standpunkt zum jeweiligen Zielpunkt gemessen. Die Beobachtungsgrössen sind somit die Richtungen. Unter einer Richtung versteht man in der Geodäsie einen vom Standpunkt ausgehenden Strahl verbun-den mit einer zugeordneten Ablesung am Horizontalkreis. Ein Horizontalwinkel (α) berechnet sich aus der Differenz zweier Richtungen.
Wird eine der beiden Richtungen eines Winkels durch die Ordinate des jeweiligen Bezugssystems (Kartennord) charak-terisiert, so wird der entsprechende Winkel zum Zielpunkt als Azimut bezeichnet. Falls der entsprechende Winkel mit einem Abriss (siehe Kap. 4.5) berechnet wird, so wird dieser Wert als orientierte Richtung bezeichnet.
Azimute und orientierte Richtungen werden bei der Koordi-natenberechnungen benötigt.
Ri = 0
A
B
Karten Nord
RiA
RiB
P
αΑ,Β
Az(P,A)
Az(P,B)
Abb. 4.23 Darstellung von Richtungen, Winkeln, Azimuten(3-dimensional)
B
A
Az(A)Ri(A)
Az(B) Ri(B)
α =Ri(B)-Ri(A)=Az(B)-Az(A)
Kartennord
Teilkreisnull
Lotrichtung
Horizontalebene
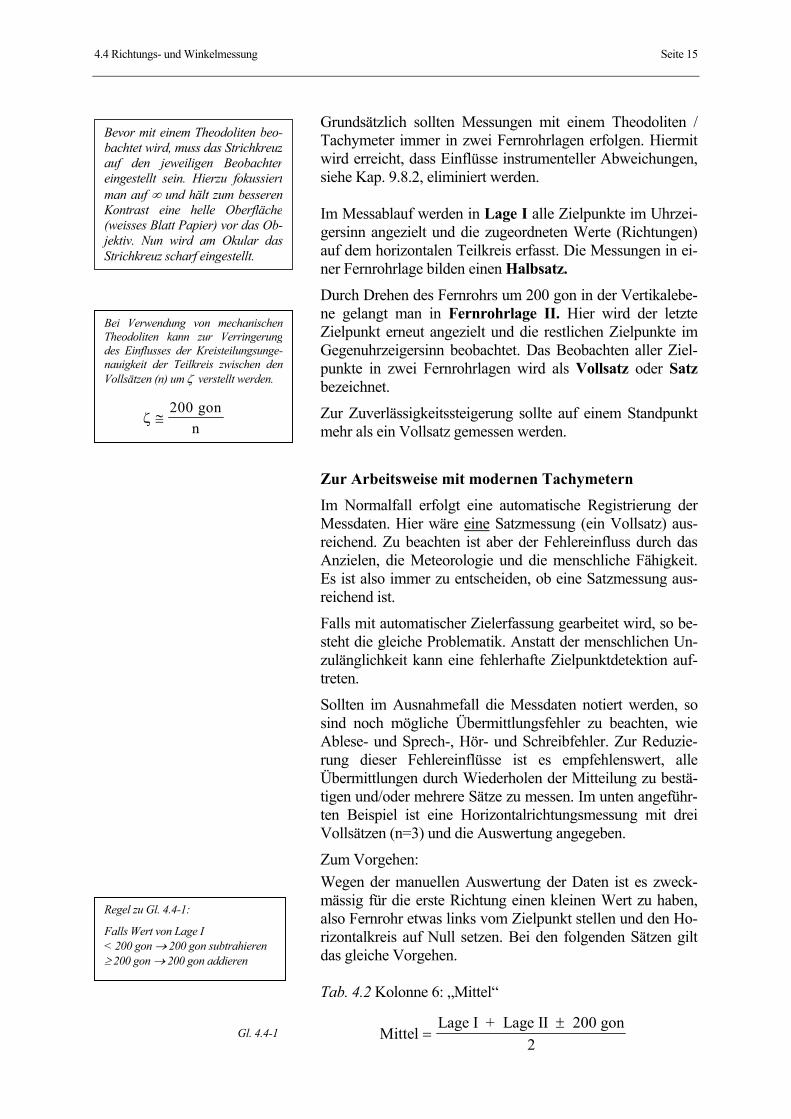
4.4 Richtungs- und Winkelmessung Seite 15
Grundsätzlich sollten Messungen mit einem Theodoliten / Tachymeter immer in zwei Fernrohrlagen erfolgen. Hiermit wird erreicht, dass Einflüsse instrumenteller Abweichungen, siehe Kap. 9.8.2, eliminiert werden. Im Messablauf werden in Lage I alle Zielpunkte im Uhrzei-gersinn angezielt und die zugeordneten Werte (Richtungen) auf dem horizontalen Teilkreis erfasst. Die Messungen in ei-ner Fernrohrlage bilden einen Halbsatz.
Durch Drehen des Fernrohrs um 200 gon in der Vertikalebe-ne gelangt man in Fernrohrlage II. Hier wird der letzte Zielpunkt erneut angezielt und die restlichen Zielpunkte im Gegenuhrzeigersinn beobachtet. Das Beobachten aller Ziel-punkte in zwei Fernrohrlagen wird als Vollsatz oder Satz bezeichnet.
Zur Zuverlässigkeitssteigerung sollte auf einem Standpunkt mehr als ein Vollsatz gemessen werden. Zur Arbeitsweise mit modernen Tachymetern Im Normalfall erfolgt eine automatische Registrierung der Messdaten. Hier wäre eine Satzmessung (ein Vollsatz) aus-reichend. Zu beachten ist aber der Fehlereinfluss durch das Anzielen, die Meteorologie und die menschliche Fähigkeit. Es ist also immer zu entscheiden, ob eine Satzmessung aus-reichend ist.
Falls mit automatischer Zielerfassung gearbeitet wird, so be-steht die gleiche Problematik. Anstatt der menschlichen Un-zulänglichkeit kann eine fehlerhafte Zielpunktdetektion auf-treten.
Sollten im Ausnahmefall die Messdaten notiert werden, so sind noch mögliche Übermittlungsfehler zu beachten, wie Ablese- und Sprech-, Hör- und Schreibfehler. Zur Reduzie-rung dieser Fehlereinflüsse ist es empfehlenswert, alle Übermittlungen durch Wiederholen der Mitteilung zu bestä-tigen und/oder mehrere Sätze zu messen. Im unten angeführ-ten Beispiel ist eine Horizontalrichtungsmessung mit drei Vollsätzen (n=3) und die Auswertung angegeben.
Zum Vorgehen: Wegen der manuellen Auswertung der Daten ist es zweck-mässig für die erste Richtung einen kleinen Wert zu haben, also Fernrohr etwas links vom Zielpunkt stellen und den Ho-rizontalkreis auf Null setzen. Bei den folgenden Sätzen gilt das gleiche Vorgehen. Tab. 4.2 Kolonne 6: „Mittel“
Mittel
Lage I =
±+ Lage II 200 gon2
Gl. 4.4-1
Bevor mit einem Theodoliten beo-bachtet wird, muss das Strichkreuzauf den jeweiligen Beobachter eingestellt sein. Hierzu fokussiertman auf ∞ und hält zum besseren Kontrast eine helle Oberfläche(weisses Blatt Papier) vor das Ob-jektiv. Nun wird am Okular dasStrichkreuz scharf eingestellt.
Bei Verwendung von mechanischenTheodoliten kann zur Verringerungdes Einflusses der Kreisteilungsunge-nauigkeit der Teilkreis zwischen denVollsätzen (n) um ζ verstellt werden.
ζ ≅
200 gonn
Regel zu Gl. 4.4-1:
Falls Wert von Lage I < 200 gon → 200 gon subtrahieren ≥ 200 gon → 200 gon addieren
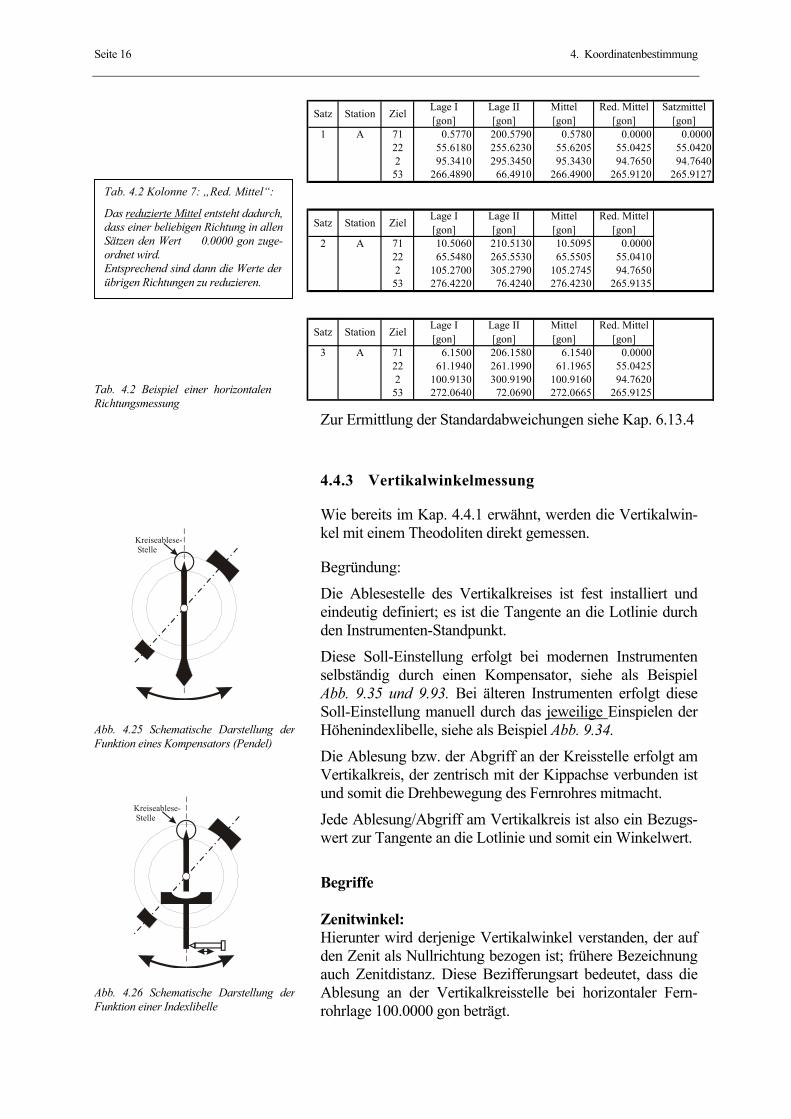
Seite 16 4. Koordinatenbestimmung
Zur Ermittlung der Standardabweichungen siehe Kap. 6.13.4
4.4.3 Vertikalwinkelmessung
Wie bereits im Kap. 4.4.1 erwähnt, werden die Vertikalwin-kel mit einem Theodoliten direkt gemessen.
Begründung:
Die Ablesestelle des Vertikalkreises ist fest installiert und eindeutig definiert; es ist die Tangente an die Lotlinie durch den Instrumenten-Standpunkt.
Diese Soll-Einstellung erfolgt bei modernen Instrumenten selbständig durch einen Kompensator, siehe als Beispiel Abb. 9.35 und 9.93. Bei älteren Instrumenten erfolgt diese Soll-Einstellung manuell durch das jeweilige Einspielen der Höhenindexlibelle, siehe als Beispiel Abb. 9.34.
Die Ablesung bzw. der Abgriff an der Kreisstelle erfolgt am Vertikalkreis, der zentrisch mit der Kippachse verbunden ist und somit die Drehbewegung des Fernrohres mitmacht.
Jede Ablesung/Abgriff am Vertikalkreis ist also ein Bezugs-wert zur Tangente an die Lotlinie und somit ein Winkelwert.
Begriffe Zenitwinkel: Hierunter wird derjenige Vertikalwinkel verstanden, der auf den Zenit als Nullrichtung bezogen ist; frühere Bezeichnung auch Zenitdistanz. Diese Bezifferungsart bedeutet, dass die Ablesung an der Vertikalkreisstelle bei horizontaler Fern-rohrlage 100.0000 gon beträgt.
Tab. 4.2 Beispiel einer horizontalenRichtungsmessung
Tab. 4.2 Kolonne 7: „Red. Mittel“:
Das reduzierte Mittel entsteht dadurch,dass einer beliebigen Richtung in allenSätzen den Wert 0.0000 gon zuge-ordnet wird. Entsprechend sind dann die Werte derübrigen Richtungen zu reduzieren.
1 A 71 0.5770 200.5790 0.5780 0.0000 0.000022 55.6180 255.6230 55.6205 55.0425 55.04202 95.3410 295.3450 95.3430 94.7650 94.7640
53 266.4890 66.4910 266.4900 265.9120 265.9127
2 A 71 10.5060 210.5130 10.5095 0.000022 65.5480 265.5530 65.5505 55.04102 105.2700 305.2790 105.2745 94.7650
53 276.4220 76.4240 276.4230 265.9135
3 A 71 6.1500 206.1580 6.1540 0.000022 61.1940 261.1990 61.1965 55.04252 100.9130 300.9190 100.9160 94.7620
53 272.0640 72.0690 272.0665 265.9125
Lage II [gon]
Mittel [gon]
Red. Mittel [gon]Satz Station Ziel Lage I
[gon]
Lage II [gon]
Mittel [gon]
Red. Mittel [gon]Satz Station Ziel Lage I
[gon]
Lage II [gon]
Mittel [gon]
Red. Mittel [gon]
Satzmittel [gon]Satz Station Ziel Lage I
[gon]
Kreiseablese- Stelle
Abb. 4.25 Schematische Darstellung derFunktion eines Kompensators (Pendel)
Kreiseablese- Stelle
Abb. 4.26 Schematische Darstellung derFunktion einer Indexlibelle
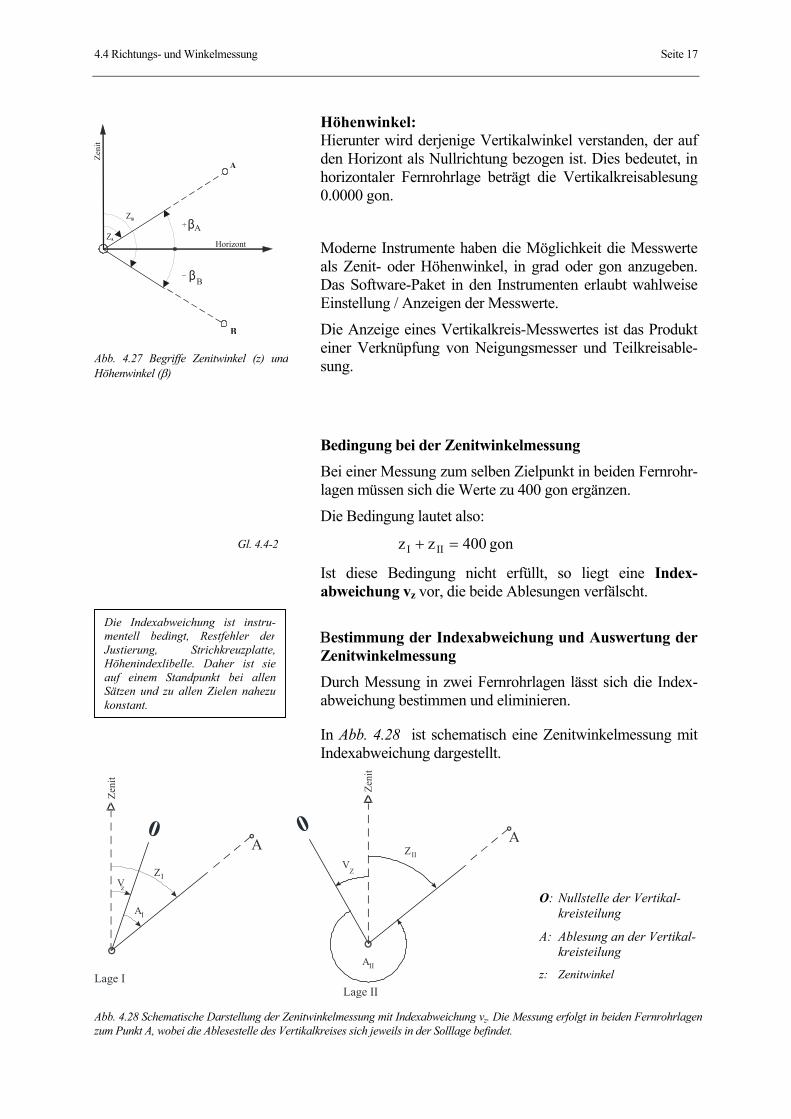
4.4 Richtungs- und Winkelmessung Seite 17
Höhenwinkel: Hierunter wird derjenige Vertikalwinkel verstanden, der auf den Horizont als Nullrichtung bezogen ist. Dies bedeutet, in horizontaler Fernrohrlage beträgt die Vertikalkreisablesung 0.0000 gon.
Moderne Instrumente haben die Möglichkeit die Messwerte als Zenit- oder Höhenwinkel, in grad oder gon anzugeben. Das Software-Paket in den Instrumenten erlaubt wahlweise Einstellung / Anzeigen der Messwerte.
Die Anzeige eines Vertikalkreis-Messwertes ist das Produkt einer Verknüpfung von Neigungsmesser und Teilkreisable-sung.
Bedingung bei der Zenitwinkelmessung Bei einer Messung zum selben Zielpunkt in beiden Fernrohr-lagen müssen sich die Werte zu 400 gon ergänzen.
Die Bedingung lautet also:
gon 400zz III =+
Ist diese Bedingung nicht erfüllt, so liegt eine Index-abweichung vz vor, die beide Ablesungen verfälscht.
Βestimmung der Indexabweichung und Auswertung der Zenitwinkelmessung
Durch Messung in zwei Fernrohrlagen lässt sich die Index-abweichung bestimmen und eliminieren.
In Abb. 4.28 ist schematisch eine Zenitwinkelmessung mit Indexabweichung dargestellt.
Abb. 4.28 Schematische Darstellung der Zenitwinkelmessung mit Indexabweichung vz. Die Messung erfolgt in beiden Fernrohrlagenzum Punkt A, wobei die Ablesestelle des Vertikalkreises sich jeweils in der Solllage befindet.
Horizont
A
B
Abb. 4.27 Begriffe Zenitwinkel (z) undHöhenwinkel (β)
Gl. 4.4-2
Vz
AI
ZI
A
Lage I
VZ
AII
ZII
Zeni
t
A
Lage II
Zeni
t
0
Die Indexabweichung ist instru-mentell bedingt, Restfehler derJustierung, Strichkreuzplatte,Höhenindexlibelle. Daher ist sieauf einem Standpunkt bei allenSätzen und zu allen Zielen nahezukonstant.
O: Nullstelle der Vertikal-kreisteilung
A: Ablesung an der Vertikal-kreisteilung
z: Zenitwinkel
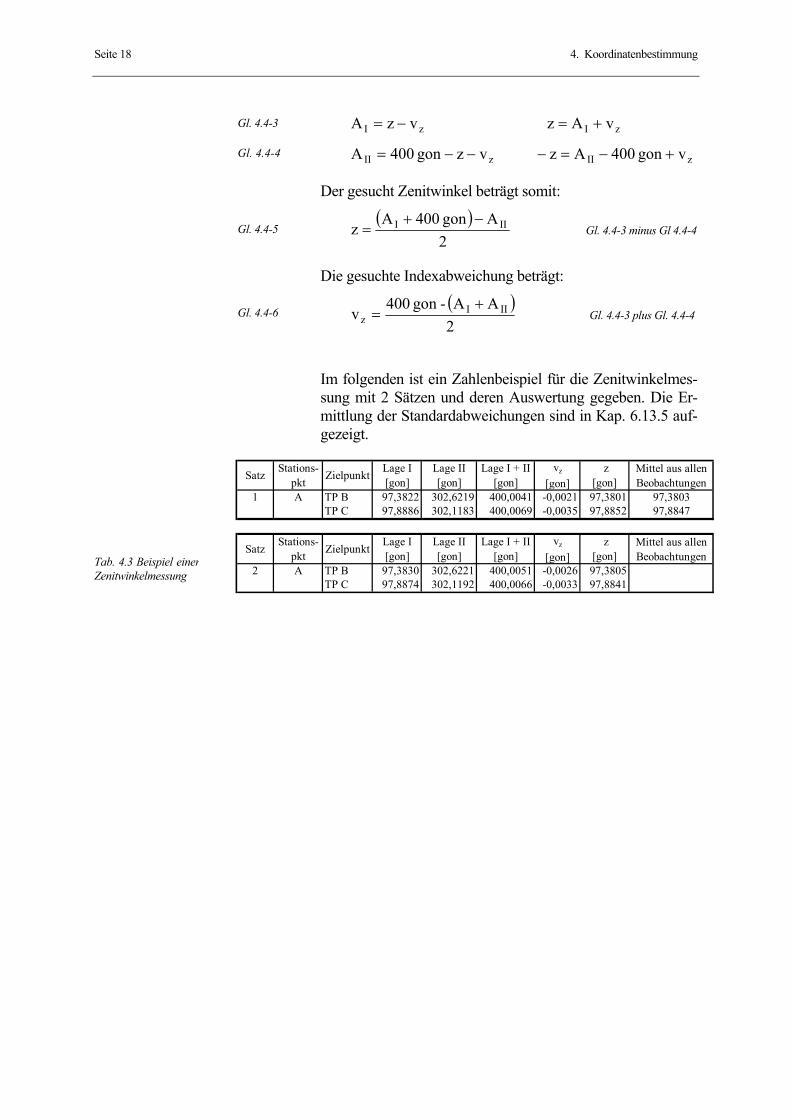
Seite 18 4. Koordinatenbestimmung
zI vzA −= zI vAz +=
zII vzgon 400A −−= zII vgon 400Az +−=−
Der gesucht Zenitwinkel beträgt somit:
( )
2Agon 400Az III −+
= Gl. 4.4-3 minus Gl 4.4-4
Die gesuchte Indexabweichung beträgt:
( )2
AA-gon 400v IIIz
+= Gl. 4.4-3 plus Gl. 4.4-4
Im folgenden ist ein Zahlenbeispiel für die Zenitwinkelmes-sung mit 2 Sätzen und deren Auswertung gegeben. Die Er-mittlung der Standardabweichungen sind in Kap. 6.13.5 auf-gezeigt.
Satz Stations-pkt Zielpunkt Lage I
[gon]Lage II [gon]
Lage I + II [gon]
vz
[gon] z
[gon]Mittel aus allen Beobachtungen
1 A TP B 97,3822 302,6219 400,0041 -0,0021 97,3801 97,3803TP C 97,8886 302,1183 400,0069 -0,0035 97,8852 97,8847
Satz Stations-pkt Zielpunkt Lage I
[gon]Lage II [gon]
Lage I + II [gon]
vz
[gon] z
[gon]Mittel aus allen Beobachtungen
2 A TP B 97,3830 302,6221 400,0051 -0,0026 97,3805TP C 97,8874 302,1192 400,0066 -0,0033 97,8841
Gl. 4.4-3
Tab. 4.3 Beispiel einerZenitwinkelmessung
Gl. 4.4-4
Gl. 4.4-5
Gl. 4.4-6
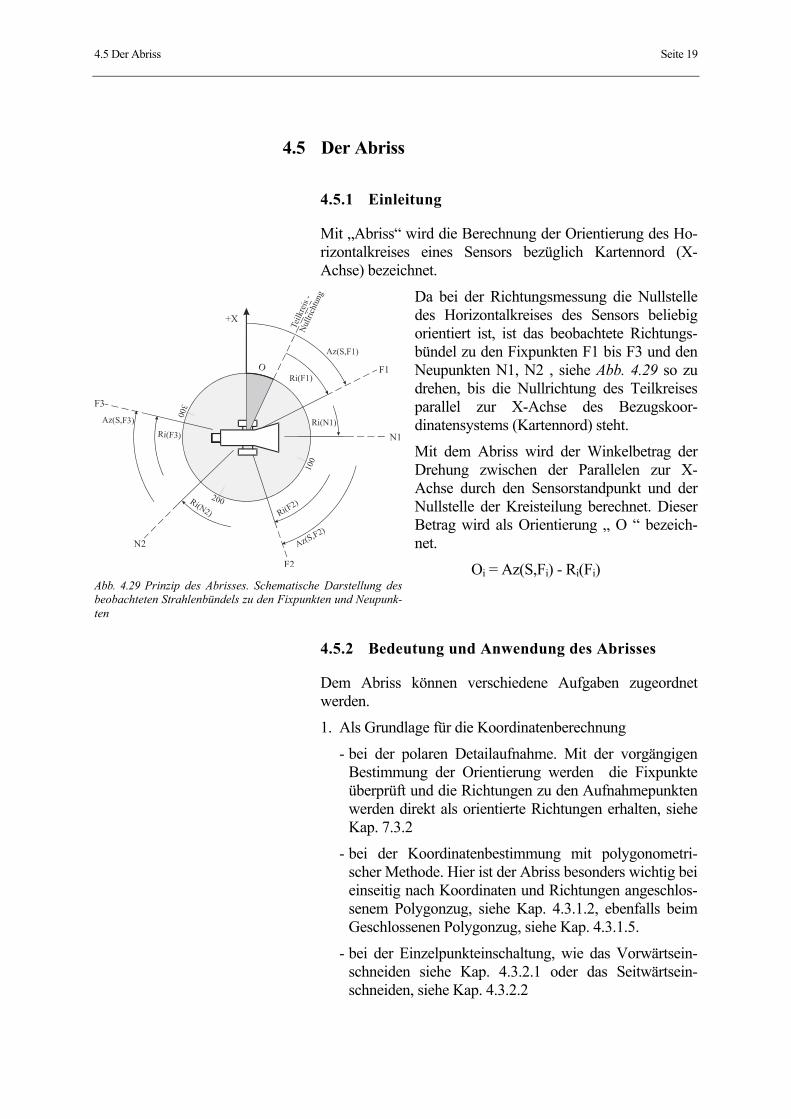
4.5 Der Abriss Seite 19
Abb. 4.29 Prinzip des Abrisses. Schematische Darstellung desbeobachteten Strahlenbündels zu den Fixpunkten und Neupunk-ten
4.5 Der Abriss
4.5.1 Einleitung
Mit „Abriss“ wird die Berechnung der Orientierung des Ho-rizontalkreises eines Sensors bezüglich Kartennord (X-Achse) bezeichnet.
Da bei der Richtungsmessung die Nullstelle des Horizontalkreises des Sensors beliebig orientiert ist, ist das beobachtete Richtungs-bündel zu den Fixpunkten F1 bis F3 und den Neupunkten N1, N2 , siehe Abb. 4.29 so zu drehen, bis die Nullrichtung des Teilkreises parallel zur X-Achse des Bezugskoor-dinatensystems (Kartennord) steht.
Mit dem Abriss wird der Winkelbetrag der Drehung zwischen der Parallelen zur X-Achse durch den Sensorstandpunkt und der Nullstelle der Kreisteilung berechnet. Dieser Betrag wird als Orientierung „ O “ bezeich-net.
Oi = Az(S,Fi) - Ri(Fi)
4.5.2 Bedeutung und Anwendung des Abrisses
Dem Abriss können verschiedene Aufgaben zugeordnet werden.
1. Als Grundlage für die Koordinatenberechnung
- bei der polaren Detailaufnahme. Mit der vorgängigen Bestimmung der Orientierung werden die Fixpunkte überprüft und die Richtungen zu den Aufnahmepunkten werden direkt als orientierte Richtungen erhalten, siehe Kap. 7.3.2
- bei der Koordinatenbestimmung mit polygonometri-scher Methode. Hier ist der Abriss besonders wichtig bei einseitig nach Koordinaten und Richtungen angeschlos-senem Polygonzug, siehe Kap. 4.3.1.2, ebenfalls beim Geschlossenen Polygonzug, siehe Kap. 4.3.1.5.
- bei der Einzelpunkteinschaltung, wie das Vorwärtsein-schneiden siehe Kap. 4.3.2.1 oder das Seitwärtsein-schneiden, siehe Kap. 4.3.2.2
F1
F2
F3
N1
N2
S
+X
O
300
200
100
Teilk
reis
-Nu
llric
htun
g
Az(S,F1)
Ri(F1)
Ri(N1)
Ri(F2)
Az(S,F2)
Ri(N2)
Ri(F3)
Az(S,F3)
Seite 20 4. Koordinatenbestimmung
2. Als Beurteilungskriterium für die Überprüfung des Koor-dinatenwertes eines Punktes mit der Lage seiner Versi-cherung.
Gründe hierfür sind - Mögliche Geländeverschiebungen, die Lage der
Punktversicherung ist verändert - Beschädigung der Punktversicherung - Verlegung der Punktversicherung
3. Als Beurteilungskriterium für die Überprüfung der Ho-mogenität des Fixpunktnetzes eines Gebietes. Aus der Be-rechnung der Orientierungsbeträge zu den Fixpunkten (Azimut minus beobachteter Richtung) kann auf eventuel-le Inhomogenitäten im Fixpunktnetz geschlossen werden.
Zu beachten sind die Kap. 4.5.3 Bestimmung von orientier-ten Richtungen, Rechengang: 4. Rechenkontrolle und Ge-nauigkeitsangabe sowie Kap. 6.13.6 Genauigkeitsangaben beim Abriss.
Massnahmen für eine zuverlässige Berechnung des Orien-tierungsbetrages und damit der Berechnung der orientierten Richtungen, sowie zur Beurteilung der Punktgenauigkeit und der Netzhomogenität sind:
- genaue Zentrierungen der Sensoren über den Punktversi-cherungen (unerlässlich)
- genaue und zuverlässige Messungen mit Überbestimmung (unerlässlich)
Fazit: Der Abriss ist wie vorstehend erwähnt, von grosser Wichtig-keit. Bei Punktberechnungen, für die keine orientierte Rich-tungen verwendet werden, wie zum Beispiel bei der polygo-nometrischen Bestimmung „Beidseitig nach Koordinaten an-geschlossener Polygonzug, Kap. 4.3.1.3“ sind Kontrollen von Anfangs- und Endpunkt des Zuges unerlässlich. Diese Kontrollen können mit dem Abriss oder einer „Freien Statio-nierung, Kap. 4.3.2.6“ erfolgen, siehe auch numerisches Bei-spiel in Kap. 4.8.2.

4.5 Der Abriss Seite 21
4.5.3 Bestimmung von orientierten Richtungen, Re-chengang
Die Berechnung soll anhand von Abb. 4.29 erläutert werden.
1. Mit der zweiten geodätischen Hauptaufgabe werden die Azimute Az(S,F1), Az(S,F2) und Az(S,F3) berechnet.
2. Nun kann der Orientierungsbetrag "Oi" (Drehwinkel) n-fach berechnet und gemittelt werden.
Gemäss Abb. 4.29 dreifach, jeweils zu den drei Fixpunk-ten
OF1: Az(S,F1) - Ri(F1)
OF2: Az(S,F2) - Ri(F2)
OF3: Az(S,F3) - Ri(F3)
"Omittel" ist das arithmetische Mittel nOi∑=
3. Berechnen der orientierten Richtungen für alle Fixpunkte
und den Neupunkt:
Ror: Ri + Omittel
Die orientierten Richtungen Ror entsprechen den Azimut-werten.
4. Rechenkontrolle und Genauigkeitsangabe:
Bei fehlerfreier Messung und fehlerfreien Koordinaten der verwendeten Fixpunkte (Standpunkt und Anschluss-punkte), müssten die Werte der Azimutberechnungen und den ermittelten orientierten Richtungen identisch sein. Dies wird aber praktisch nicht der Fall sein. Es gilt:
Verbesserung = Azimut - orientierte Richtung = Soll - Ist
vi = Azi - Rori
Probe: Σv = 0
Gl. 4.5-1
Gl. 4.5-2
Anmerkung zu den Oi : Die Werte der Oi sollen inner-halb der Messgenauigkeit streuen. Falls dies nicht der Fall ist, so dürfen die Werte mit grosser Abweichung vom wahrscheinlichen Wert (arith-metisches Mittel) nicht für die Mittelbildung verwendet wer-den. In diesem Fall ist zu-nächst die Ursache für diese Abweichung zu prüfen. Als Ursache für grobe Abwei-chungen können in Frage kom-men: Punktkoordinaten stimmen nicht mehr mit der Punktlage überein (z.B. wegen Rutschung, Beschädigung des Punktes), Punktverwechslung, Messfehler oder auch eine Verdrehung des Statives.
Gl. 4.5-3
Gl. 4.5-4
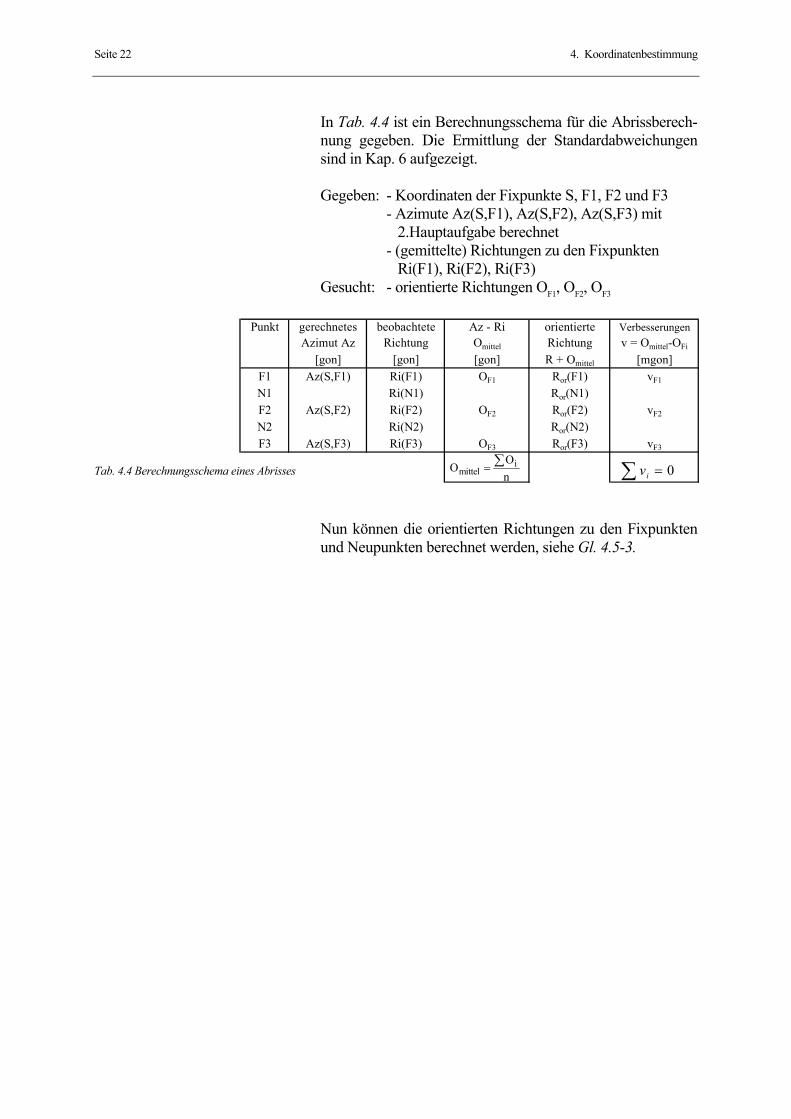
Seite 22 4. Koordinatenbestimmung
In Tab. 4.4 ist ein Berechnungsschema für die Abrissberech-nung gegeben. Die Ermittlung der Standardabweichungen sind in Kap. 6 aufgezeigt.
Gegeben: - Koordinaten der Fixpunkte S, F1, F2 und F3
- Azimute Az(S,F1), Az(S,F2), Az(S,F3) mit 2.Hauptaufgabe berechnet - (gemittelte) Richtungen zu den Fixpunkten Ri(F1), Ri(F2), Ri(F3)
Gesucht: - orientierte Richtungen OF1, OF2, OF3 Nun können die orientierten Richtungen zu den Fixpunkten und Neupunkten berechnet werden, siehe Gl. 4.5-3.
Punkt gerechnetes beobachtete Az - Ri orientierte VerbesserungenAzimut Az Richtung Omittel Richtung v = Omittel-OFi
[gon] [gon] [gon] R + Omittel [mgon]F1 Az(S,F1) Ri(F1) OF1 Ror(F1) vF1
N1 Ri(N1) Ror(N1)F2 Az(S,F2) Ri(F2) OF2 Ror(F2) vF2
N2 Ri(N2) Ror(N2)F3 Az(S,F3) Ri(F3) OF3 Ror(F3) vF3
OOnmittel
i= ∑vi =∑ 0Tab. 4.4 Berechnungsschema eines Abrisses
4.6 Distanzreduktion Seite 23
4.6 Distanzreduktion
4.6.1 Einleitung
Aus den Kongruenzsätzen der ebenen Geometrie ist bekannt, dass Dreiecke nur dann definiert sind, wenn mindestens eine Seite bekannt ist. Dementsprechend gilt auch in der geodäti-schen Messtechnik, dass aus Richtungen bzw. Winkeln allein noch keine Koordinaten bestimmt werden können. Somit sind für die Methoden der Koordinatenbestimmung stets auch Distanzmessungen notwendig.
Indirekt können Distanzen mit Hilfe von GPS (Raumvekto-ren, siehe Kap. 9) gemessen werden.
Direkt werden längere Distanzen mit hohen Genauigkeitsan-forderungen in der Praxis heute mittels elektronischer Dis-tanzmessgeräten (EDM) gemessen, welche auf die Theodoli-te aufgesetzt werden oder in solche eingebaut sind (Totalsta-tion). Bevor jedoch die mit EDM gemessenen Distanzen für die Koordinatenbestimmung verwendet werden können, müssen verschiedene Korrektionen und Reduktionen ange-bracht werden, welche im folgenden näher vorgestellt wer-den.
4.6.2 Zweck und Umfang der Distanzreduktion
Mit Hilfe der Distanzreduktion werden die gemessenen Dis-tanzen in Distanzen des ebenen Projektionssystems umge-rechnet, welches das Bezugssystem der Koordinaten dar-stellt. Somit gelten für die in das Projektionssystem reduzier-ten Distanzen die Regeln des ebenen Koordinatenrechnens (vgl. Kap. 3).
Grundsätzlich sind folgende Korrektionen und Reduktionen massgebend:
1. Instrumentell bedingte Korrektionen (Kap. 4.6.3)
2. Meteorologische Korrektionen (Kap. 4.6.4)
3. Geometrische Reduktionen (Kap. 4.6.5 und 4.6.6)
Im Falle der Koordinatenbestimmung mittels Distanzmes-sung werden die Korrektionen und Reduktionen in der oben erwähnten Reihenfolge an die gemessenen Rohdistanzen an-gebracht.
In der umgekehrten Reihenfolgeund mit umgekehrtem Vorzeichenmüssen diese Korrektionen undReduktionen an Distanzen ange-bracht werden, welche aus Koor-dinaten bestimmt wurden und imGelände für Absteckungsarbeiten(vgl. Kap. 8) benötigt werden.
Seite 24 4. Koordinatenbestimmung
4.6.3 Instrumentell bedingte Korrektionen
Je nach eingesetztem Distanzmessverfahren (EDM, GPS, Messband) sind unterschiedliche instrumentell bedingte Kor-rektionen notwendig. Auf die instrumentell bedingten Kor-rektionen wird in Kap. 9 näher eingegangen.
Beispiele für instrumentell bedingte Korrektionen sind - bei der elektronischen Distanzmessung - die Frequenzkorrektion (Massstabsabweichung) und die Additionskonstante.
Im folgenden Abschnitt wird vorausgesetzt, dass Schrägdis-tanzen ds vorliegen, bei welchen die instrumentell bedingten Korrektionen bereits angebracht worden sind oder bei wel-chen diese im Rahmen der gewünschten Genauigkeit ver-nachlässigbar klein sind.
4.6.4 Meteorologische Korrektionen
Meteorologische Korrektionen sind bei Distanzmessverfah-ren anzubringen, welche elektromagnetische Wellen benut-zen, denn die Wellenausbreitungsgeschwindigkeit c variiert mit dem Brechungsindex n der Luft:
Bei elektromagnetischen Wellen ist c0 die Lichtgeschwindig-keit im Vakuum.
Der Brechungsindex ist eine Funktion der Temperatur T, des Luftdrucks p, des Dampfdruckes e und der Wellenlänge λ:
n = f(p,T,e,λ) Für LEICA-Distanzmesser (λ = 0.850 µm) und unter Ver-nachlässigung des Dampfdruckes der Luft ergibt sich fol-gende Gebrauchsformel für die meteokorrigierte Schrägdis-tanz: Für detailliertere Informationen bezüglich meteorologischer Korrektionen wird auf Kap. 9.11.6 verwiesen.
ccn
= 0
d d dp hPa
T Cm s s= + ⋅ ⋅ −⋅
+ ⋅ °
−10 2820 29
1 0 00376 . [ ]
. [ ]
Gl. 4.6-1
Gl. 4.6-2
Gl. 4.6-3
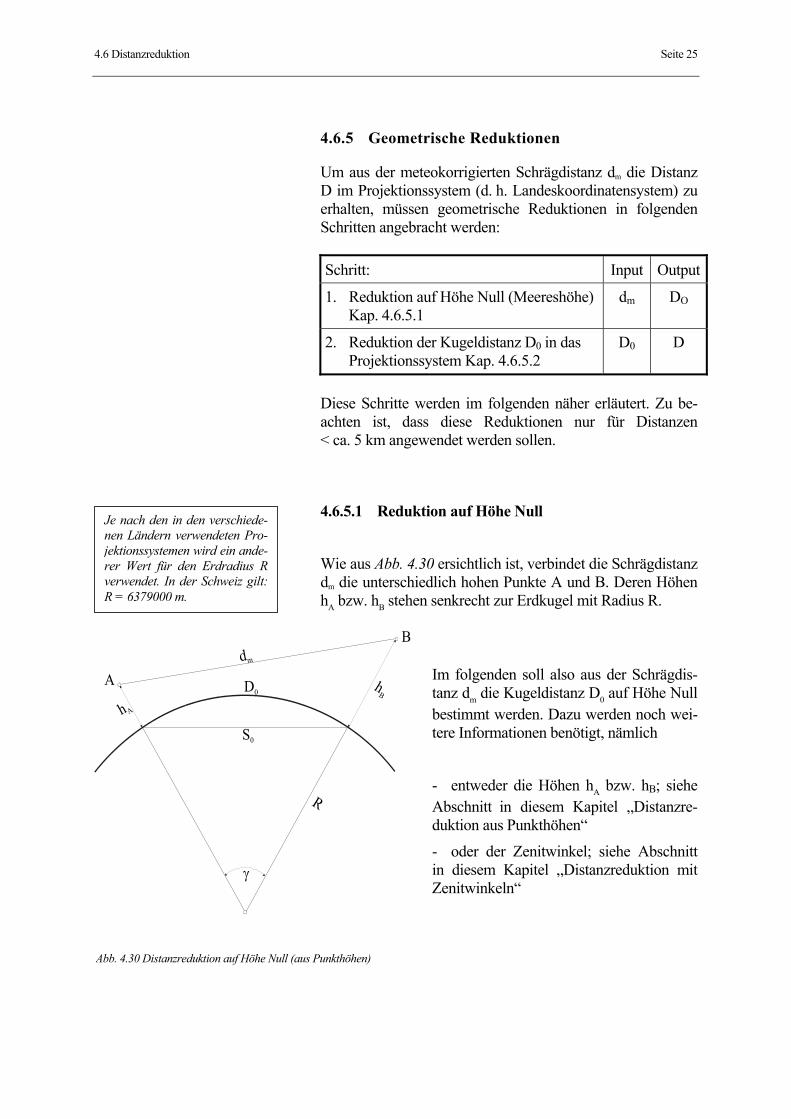
4.6 Distanzreduktion Seite 25
4.6.5 Geometrische Reduktionen
Um aus der meteokorrigierten Schrägdistanz dm die Distanz D im Projektionssystem (d. h. Landeskoordinatensystem) zu erhalten, müssen geometrische Reduktionen in folgenden Schritten angebracht werden: Schritt: Input Output
1. Reduktion auf Höhe Null (Meereshöhe) Kap. 4.6.5.1
dm DO
2. Reduktion der Kugeldistanz D0 in das Projektionssystem Kap. 4.6.5.2
D0 D
Diese Schritte werden im folgenden näher erläutert. Zu be-achten ist, dass diese Reduktionen nur für Distanzen < ca. 5 km angewendet werden sollen.
4.6.5.1 Reduktion auf Höhe Null
Wie aus Abb. 4.30 ersichtlich ist, verbindet die Schrägdistanz dm die unterschiedlich hohen Punkte A und B. Deren Höhen hA bzw. hB stehen senkrecht zur Erdkugel mit Radius R.
Im folgenden soll also aus der Schrägdis-tanz dm die Kugeldistanz D0 auf Höhe Null bestimmt werden. Dazu werden noch wei-tere Informationen benötigt, nämlich
- entweder die Höhen hA bzw. hB; siehe Abschnitt in diesem Kapitel „Distanzre-duktion aus Punkthöhen“
- oder der Zenitwinkel; siehe Abschnitt in diesem Kapitel „Distanzreduktion mit Zenitwinkeln“
Je nach den in den verschiede-nen Ländern verwendeten Pro-jektionssystemen wird ein ande-rer Wert für den Erdradius Rverwendet. In der Schweiz gilt:R = 6379000 m.
γ
A
B
D0 hB
h A
S0
dm
R
Abb. 4.30 Distanzreduktion auf Höhe Null (aus Punkthöhen)
Seite 26 4. Koordinatenbestimmung
Distanzreduktion aus Punkthöhen
Die Distanzreduktion aus Punkthöhen ist die genaueste Re-duktionsmethode und kommt dann zum Einsatz, wenn die el-lipsoidischen Höhen (siehe Kap. 1 und 5) hA und hB der Punkte A bzw. B genügend genau bekannt sind.
Aufgrund der Abb. 4.30 kann die Kugeldistanz auf Höhe Null wie folgt berechnet werden:
wobei
Herleitung von Gl. 4.6 - 4:
Für Distanzen kleiner als 10 km darf die Sehnendistanz S0 mit der Kugeldistanz D0 gleichgesetzt werden (Feh-ler < 1 mm).
Ebenfalls darf für die ellipsoidischen Höhen hA und hB die or-thometrische Höhe (“Gebrauchshöhen”) HA und HB der Punkte A bzw. B verwendet werden, obwohl sich diese auf das Geoid und nicht auf die Kugel mit Radius R beziehen.
Hingegen übt die Standardabweichung der Höhendifferenz zwischen A und B den massgebenden Einfluss auf die Ge-nauigkeit der Kugeldistanz D0 aus. Zur Abschätzung der Ge-nauigkeitsanforderung an die Höhendifferenz kann folgende Formel verwendet werden:
D Sd hhR
hR
m
A B0 0
2 2
1 1≅ =
−
+
+
∆
( ) ( ) ( )( )( ) ( ) ( )( ) ( )( )( )
( )
( )( )
( ) ( )( )
d h R h R h R h R
d h R h R h R h R h R h R
mit
d h h h h h R h R
d h h h R h R h
m A B A B
m A B A B A B
m A B A B A B
m A B A B
2 2 2
2 2 2
2
2 2 2 2
2 2 2 2
2
2 2 1
1 22
2 2 22
42
4
= + + + − ⋅ + + ⋅
= + + + − ⋅ + + + ⋅ + + −
− = ⋅
= + − ⋅ + ⋅ + + ⋅ ⋅
= − + ⋅ + + ⋅ = + ⋅
cos
cos
cos sin
sin
sin
γ
γ
γγ
γ
γ
folgt:
∆ ( )( )h R h RS
RA B+ +⋅
02
2
Gl. 4.6-4
Gl. 4.6-5 ( )∆h h hB A2 2
= −
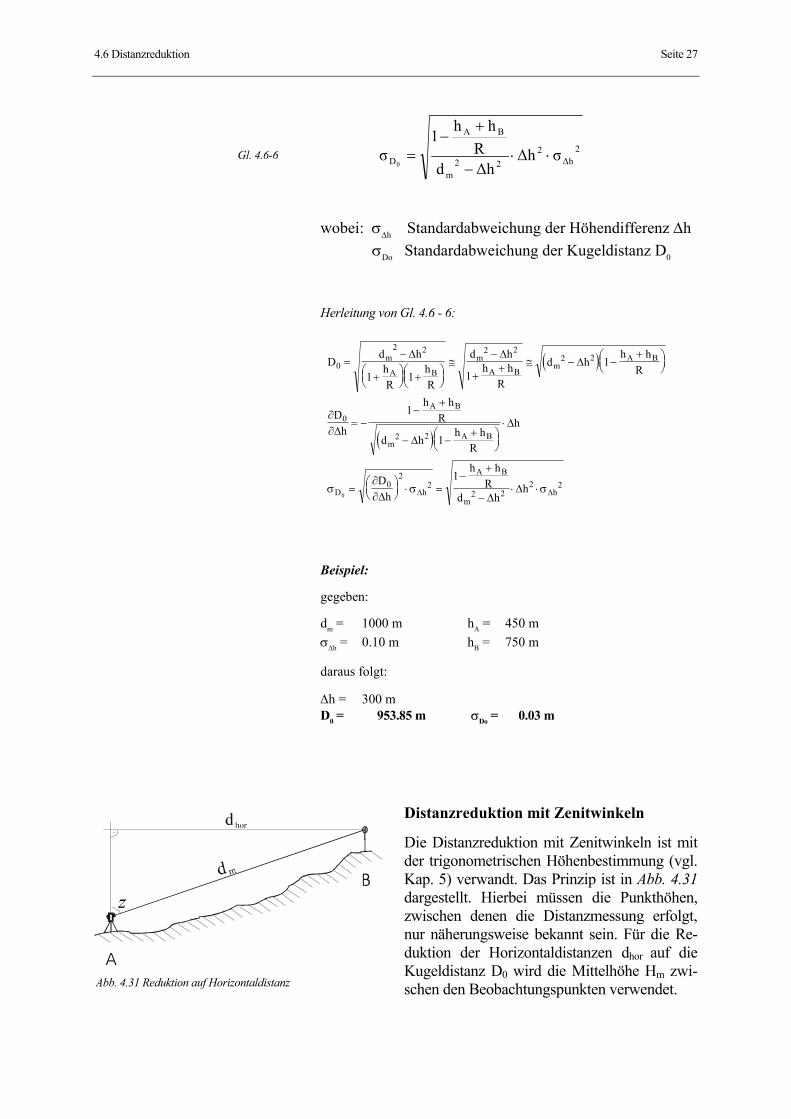
4.6 Distanzreduktion Seite 27
2∆h
222
m
BA
D σ∆h∆hdR
hh1σ
0⋅⋅
−
+−
=
wobei: σ∆h Standardabweichung der Höhendifferenz ∆h σDo Standardabweichung der Kugeldistanz D0 Herleitung von Gl. 4.6 - 6:
Beispiel:
gegeben:
dm = 1000 m hA = 450 m σ∆h = 0.10 m hB = 750 m
daraus folgt:
∆h = 300 m D0 = 953.85 m σDo = 0.03 m
Distanzreduktion mit Zenitwinkeln
Die Distanzreduktion mit Zenitwinkeln ist mit der trigonometrischen Höhenbestimmung (vgl. Kap. 5) verwandt. Das Prinzip ist in Abb. 4.31 dargestellt. Hierbei müssen die Punkthöhen, zwischen denen die Distanzmessung erfolgt, nur näherungsweise bekannt sein. Für die Re-duktion der Horizontaldistanzen dhor auf die Kugeldistanz D0 wird die Mittelhöhe Hm zwi-schen den Beobachtungspunkten verwendet.
( )
( )
Dd hhR
hR
d hh h
R
d hh h
R
Dh
h hR
d hh h
R
h
Dh
h hR
d hh
m
A B
mA B
mA B
A B
mA B
D h
A B
m
0
2 2 2 22 2
0
2 2
02
22 2
2
1 1 11
1
1
10
=−
+
+
≅−
++ ≅ − −
+
= −−
+
− −+
⋅
=
⋅ =
−+
−⋅ ⋅
∆ ∆∆
∆∆
∆∆∆ ∆
∂∂∆
σ∂∂∆
σ σ h2
Gl. 4.6-6
Abb. 4.31 Reduktion auf Horizontaldistanz
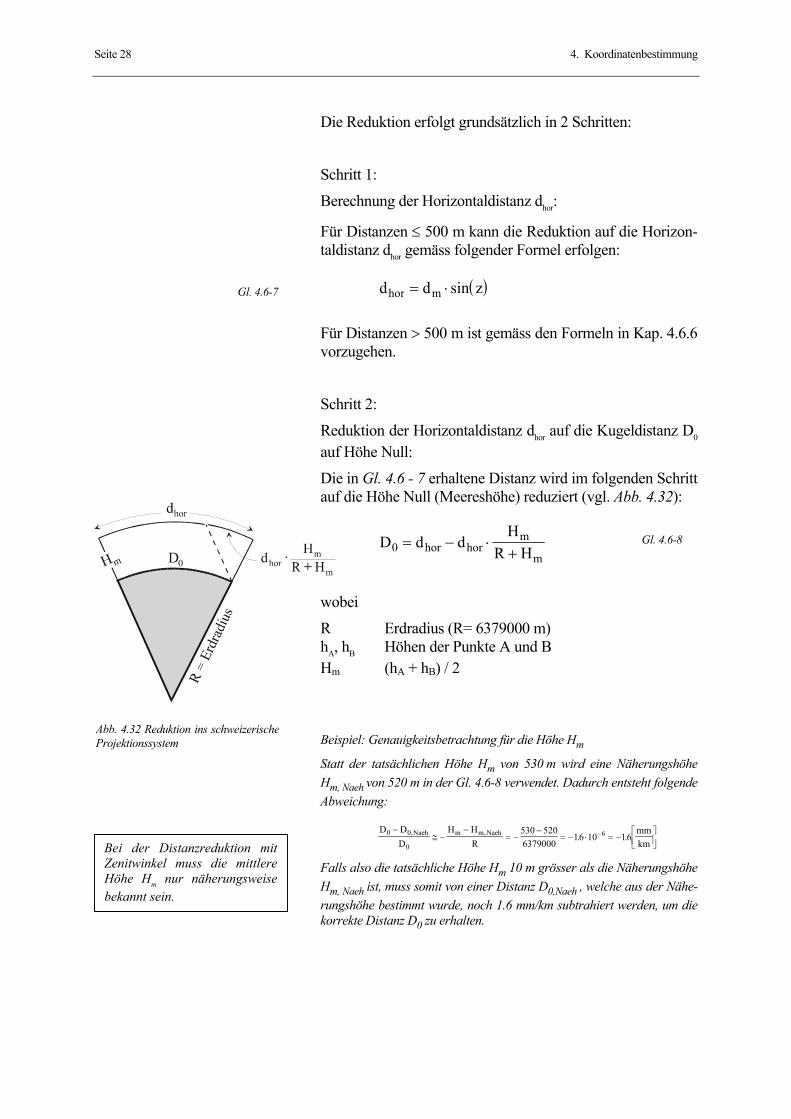
Seite 28 4. Koordinatenbestimmung
Die Reduktion erfolgt grundsätzlich in 2 Schritten:
Schritt 1:
Berechnung der Horizontaldistanz dhor:
Für Distanzen ≤ 500 m kann die Reduktion auf die Horizon-taldistanz dhor gemäss folgender Formel erfolgen:
Für Distanzen > 500 m ist gemäss den Formeln in Kap. 4.6.6 vorzugehen.
Schritt 2:
Reduktion der Horizontaldistanz dhor auf die Kugeldistanz D0 auf Höhe Null:
Die in Gl. 4.6 - 7 erhaltene Distanz wird im folgenden Schritt auf die Höhe Null (Meereshöhe) reduziert (vgl. Abb. 4.32):
wobei
R Erdradius (R= 6379000 m) hA, hB Höhen der Punkte A und B Hm (hA + hB) / 2 Beispiel: Genauigkeitsbetrachtung für die Höhe Hm
Statt der tatsächlichen Höhe Hm von 530 m wird eine Näherungshöhe Hm, Naeh von 520 m in der Gl. 4.6-8 verwendet. Dadurch entsteht folgende Abweichung: Falls also die tatsächliche Höhe Hm 10 m grösser als die Näherungshöhe Hm, Naeh ist, muss somit von einer Distanz D0,Naeh , welche aus der Nähe-rungshöhe bestimmt wurde, noch 1.6 mm/km subtrahiert werden, um die korrekte Distanz D0 zu erhalten.
( )d d zhor m= ⋅sin
D d dH
R Hhor horm
m0 = − ⋅
+
Bei der Distanzreduktion mitZenitwinkel muss die mittlereHöhe Hm nur näherungsweisebekannt sein.
Gl. 4.6-7
Gl. 4.6-8
Abb. 4.32 Reduktion ins schweizerischeProjektionssystem
D DD
H HR
mmkm
Naeh m m Naeh0 0
0
6530 5206379000
16 10 16−
≅ −−
= −−
= − ⋅ = −
−, , . .

4.6 Distanzreduktion Seite 29
4.6.5.2 Reduktion der Kugeldistanz D0 in das Projekti-onssystem
Das Projektionssystem der Schweizer Landesvermessung verursacht eine Vergrösserung der Kugeldistanz D0, wobei diese Vergrösserung mit der Nord/Süd-Entfernung von Bern quadratisch zunimmt (vgl. auch Kap. 1.8): wobei
XA, XB X-Koordinaten des Anfangspunktes A
bzw. des Endpunktes B
R = 6379000 m
Beispiel: Die ETH Hönggerberg / Zürich hat die X=Koordinate 251400 m und be-findet sich auf 550 m.ü.M. Die Nord/Süd-Entfernung bezüglich Bern be-trägt somit 51.4 km. a) Die Reduktion auf Höhe Null verkürzt eine Distanz dhor um
b) Die Reduktion in das Projektionssystem verlängert die Distanz dhor
(~D0) um
Für kurze Distanzen, welche in der Umgebung der ETH Hönggerberg gemessen werden, kann aus der gemessenen Horizontaldistanz die Dis-tanz D im Projektionssystem wie folgt berechnet werden:
D D DX
Rm= + ⋅
⋅0 0
2
22
XX X
mA B=
+2
Wenn für X die üblichenLandeskoordinaten verwen-det werden, bei welchenBern die Koordinaten(600000 / 200000) aufweist,muss von X [m] jeweils200000 m subtrahiert wer-den.
Gl. 4.6-9
∆dH
R Hmmkmhor H
m
m, = −
+= −
+= − ⋅ = −
−5506379000 550
86 10 866
∆dXR
mmkmhor X
m,
.= + = +
⋅= + ⋅ = +
−2
2
2
26
2514
2 637932 10 32
( )D d d d dhor hor hor H hor X= + ⋅ +∆ ∆, ,
( )D d d d dhor hor hor hor= + ⋅ − + ⋅ = − ⋅ ⋅− −86 32 10 54 106 6

Seite 30 4. Koordinatenbestimmung
In den Diagrammen der Abb. 4.33 sind die Reduktionen an dhor auf Höhe Null und ins Projektionssystem übersichtlich dargestellt.
Ein Beispiel für eine solche Distanzreduktion ist in Tab. 4.5 dargestellt.
Abb. 4.33 Relative Distanzkorrekturen beiden Reduktionen auf die Höhe Null und insProjektionssystem
Tab. 4.5 Beispiel einer Distanzreduktion mit dem Excel-Formular Distanzreduktion.xls
Erdradius R= 6379000 m
gemessene Daten: Meteodaten Meteokorrektur Reduktion auf Horizontaldistanz
Korr. wegen Höhe Projektions-verzerrung
D = Distanz im Projektionssystem
Schrägdistanz ds
mittl. Nord/Süd-
Abstand von Bern Xm Luftdruck
[m] [km] [hPa]
Zenitwinkel zmittlere Höhe
Hm Temperatur dm = meteokorrigierte D0 = Distanz auf D = Distanz im [gon] [m] [°C] Schrägdistanz Meereshöhe Projektionssystem
345,123 51 942,0 0,011 86,143 -0,029 0,011
86,1440 552 25,0 345,134 336,990 336,961 336,972 336,972
DistanzreduktionFür kurze Distanzen < 5 km
= ⋅ ⋅ −⋅
+ ⋅
−dp
Ts 10 282029
1 000376 .
. ( )= − ⋅+
dH
R Hhor
m
m= ⋅
⋅D
XRm
0
2
22
d d zhor m s= ⋅sin
z z d zs s= − ⋅ ⋅ ⋅−000433 10 3. sin
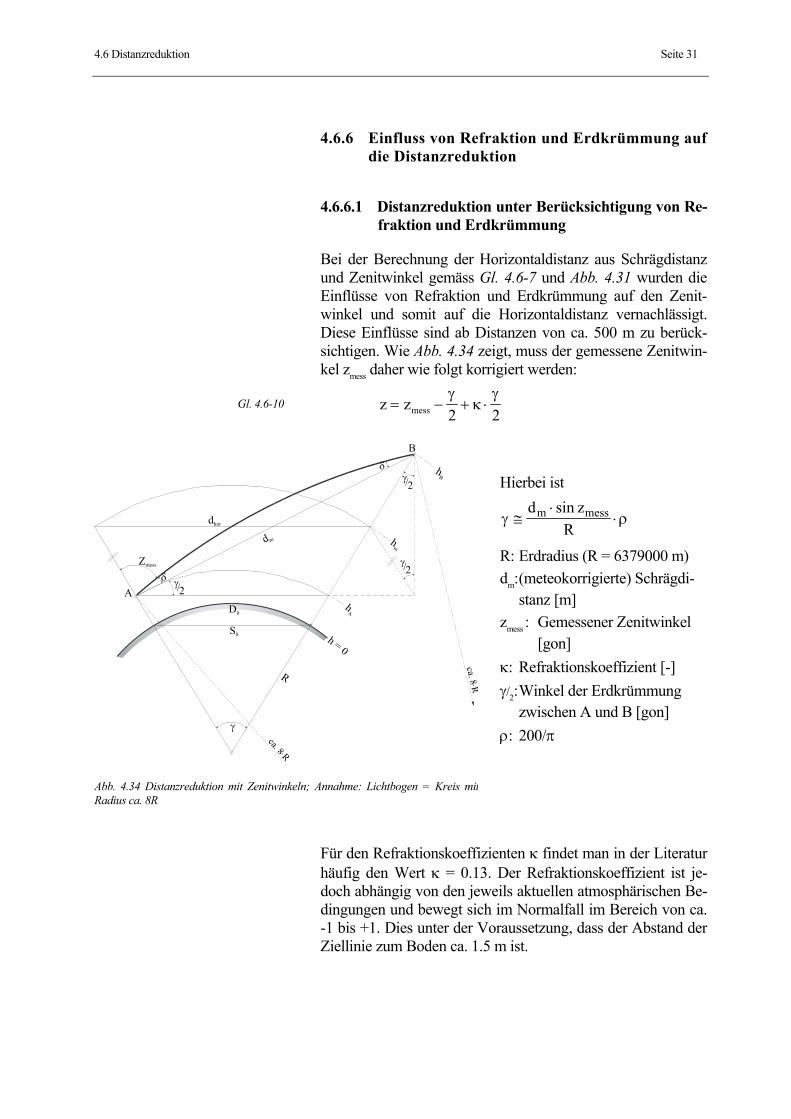
4.6 Distanzreduktion Seite 31
4.6.6 Einfluss von Refraktion und Erdkrümmung auf die Distanzreduktion
4.6.6.1 Distanzreduktion unter Berücksichtigung von Re-fraktion und Erdkrümmung
Bei der Berechnung der Horizontaldistanz aus Schrägdistanz und Zenitwinkel gemäss Gl. 4.6-7 und Abb. 4.31 wurden die Einflüsse von Refraktion und Erdkrümmung auf den Zenit-winkel und somit auf die Horizontaldistanz vernachlässigt. Diese Einflüsse sind ab Distanzen von ca. 500 m zu berück-sichtigen. Wie Abb. 4.34 zeigt, muss der gemessene Zenitwin-kel zmess daher wie folgt korrigiert werden:
Hierbei ist R: Erdradius (R = 6379000 m) dm: (meteokorrigierte) Schrägdi- stanz [m] zmess : Gemessener Zenitwinkel [gon] κ: Refraktionskoeffizient [-] γ/2: Winkel der Erdkrümmung zwischen A und B [gon] ρ: 200/π
Für den Refraktionskoeffizienten κ findet man in der Literatur häufig den Wert κ = 0.13. Der Refraktionskoeffizient ist je-doch abhängig von den jeweils aktuellen atmosphärischen Be-dingungen und bewegt sich im Normalfall im Bereich von ca. -1 bis +1. Dies unter der Voraussetzung, dass der Abstand der Ziellinie zum Boden ca. 1.5 m ist.
γ
A
B
D0
hB
hA
h = 0
hm
S0
dm
δ
δ γ2/
γ2/
γ2/
dhor
Zmess
R
ca. 8 R⋅
ca. 8R⋅
z zmess= − + ⋅γ
κγ
2 2
γ ρ≅⋅
⋅d z
Rm messsin
Gl. 4.6-10
Abb. 4.34 Distanzreduktion mit Zenitwinkeln; Annahme: Lichtbogen = Kreis mitRadius ca. 8R
Seite 32 4. Koordinatenbestimmung
Aus diesen Gründen wird im folgenden empfohlen, bei der Distanzenreduktion von grossen Distanzen (0.5 < dm < 5 [km]) wie folgt vorzugehen:
Schritt 1:
Analyse des Refraktionseinflusses durchführen und abklären, ob im Rahmen der vorgegebenen Genauigkeit κ = 0 gesetzt und somit die Distanzreduktion mit Zenitwinkel durchgeführt werden darf.
Schritt 2:
Falls die Distanzreduktion mit Zenitwinkel unter der Annahme κ = 0 möglich ist: Falls die Distanzreduktion mit Zenitwinkel unter der Annahme κ = 0 zu ungenau ist, so stehen folgende Möglichkeiten offen:
− die Höhen der Punkte A und B bestimmen und mittels hA und hB die Kugeldistanz D0 direkt berechnen gemäss Gl. 4.6 - 4
− gegenseitige, gleichzeitige Beobachtung der Zenitwinkel, siehe Kap. 4.6.6.2
− durch Messung von Temperatur, vertikalem Temperatur-gradient und Druck den Refraktionskoeffizienten κ und somit die Horizontaldistanz bestimmen:
Hierbei berechnet sich κ gemäss folgender Formel:
d d zd z
Rhor m messm mess= ⋅ −
⋅⋅
⋅
sin
sin2
ρ
( )d d zd z
Rhor m messm mess= ⋅ −
⋅⋅ ⋅ −
sin
sin2
1ρ κ
( )κ τ
τ
= ⋅ ⋅ +503 0 03422p
Tmit
.
:
]
p = Luftdruck [hPa]T = Temperatur [Kelvin]
= vertikaler Temp.gradient [dTdh
Gl. 4.6-11
Gl. 4.6-12
Gl. 4.6-13

4.6 Distanzreduktion Seite 33
4.6.6.2 Gegenseitige, gleichzeitige Zenitwinkelbeobach-tung
Sofern der Refraktionskoeffizient nicht bekannt ist, führt die Distanzreduktion mittels Zenitwinkel zu systematischen Ab-weichungen.
Wenn jedoch der Zenitwinkel von A nach B und gleichzeitig von B nach A bestimmt wird, kann der Refraktionskoeffizient unter der Annahme, dass der Lichtstrahl zwischen den beiden Punkten ein Kreisbogen ist, näherungsweise abgeschätzt wer-den.
Aufgrund der Winkelsumme im Viereck AMBP (Abb 4.33) ergibt sich
Somit berechnet sich der Refraktionskoeffzient κ näherungs-weise zu:
Nun wird κ in die Gl. 4.6-12 eingesetzt, woraus zusammen mit der Schrägdistanz dm die Hori-zontaldistanz dhor berechnet werden kann.
Die Horizontaldistanz kann auch mit guter Nä-herung aus dem Mittelwert der Hinmessung
dhor,AB = dm sin(zmess,A)
und der Rückmessung
dhor,BA = dm sin(zmess,B)
berechnet werden:
Wie die Herleitung zeigt, werden Refraktion und Erdkrümmung näherungsweise eliminiert.
Für die folgenden Berechnungenwird angenommen, dass die Re-fraktionswinkel bei den beidenPunkten A und B gleich gross sind,d.h. δA = δB = δ. Dies ist eine Vor-aussetzung, welche jedoch vorallem bei bodennahen Ziellinienoder bei gegenseitigen Zenitwin-kelmessungen zu verschiedenenZeitpunkten (mit unterschiedlichenmeteorologischen Bedingungen) imallgemeinen nicht zutreffend ist.
γ
A
B
dm
δ
δ
Zmess,A
R
Zmess,B2δP
M
( )( )( ) ( )
δ γ
γ ρ ρ
= ⋅ + − +
≅⋅
⋅ ≅⋅
⋅
12
200 z z
d zR
d zR
mess A mess B
m mess A m mess B
, ,
, ,sin sin
κδ
γ≅
⋅2
( )d d dhor hor AB hor BA= +12 , ,
Gl. 4.6-16
Gl. 4.6-17 Abb. 4.35 Gegenseitige, gleichzeitige Zenitwinkelbeobachtung
Gl. 4.6-14
Gl. 4.6-15
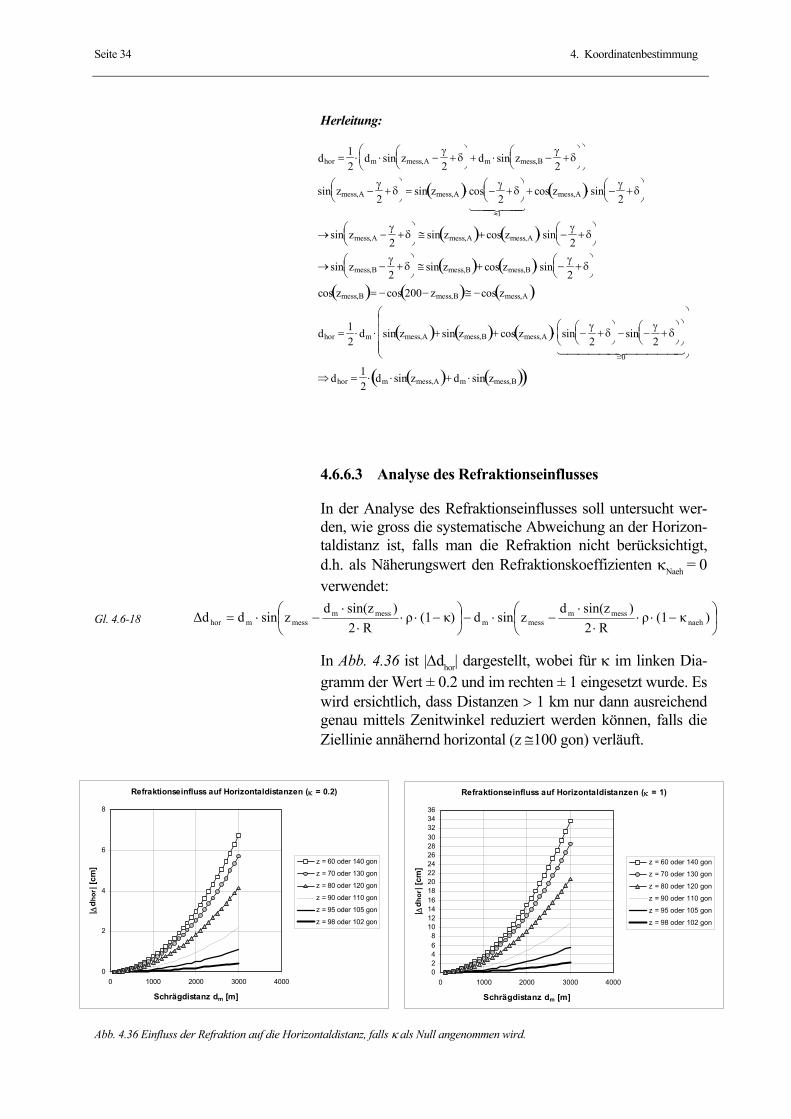
Seite 34 4. Koordinatenbestimmung
Herleitung:
4.6.6.3 Analyse des Refraktionseinflusses
In der Analyse des Refraktionseinflusses soll untersucht wer-den, wie gross die systematische Abweichung an der Horizon-taldistanz ist, falls man die Refraktion nicht berücksichtigt, d.h. als Näherungswert den Refraktionskoeffizienten κNaeh = 0 verwendet: In Abb. 4.36 ist |∆dhor| dargestellt, wobei für κ im linken Dia-gramm der Wert ± 0.2 und im rechten ± 1 eingesetzt wurde. Es wird ersichtlich, dass Distanzen > 1 km nur dann ausreichend genau mittels Zenitwinkel reduziert werden können, falls die Ziellinie annähernd horizontal (z ≅100 gon) verläuft.
( ) ( )
( ) ( )
d d z d z
z z z
z z z
hor m mess A m mess B
mess A mess A mess A
mess A mess A mess A
= ⋅ ⋅ − +
+ ⋅ − +
− +
= ⋅ − +
+ ⋅ − +
→ − +
≅ + ⋅ − +
≈
12 2 2
2 2 2
2 2
1
sin sin
sin sin cos cos sin
sin sin cos sin
, ,
, , ,
, , ,
γδ
γδ
γδ
γδ
γδ
γδ
γδ
1 244 344
( ) ( )( ) ( ) ( )
( ) ( ) ( )
→ − +
≅ + ⋅ − +
= − − ≅ −
= ⋅ ⋅ + + ⋅ − +
− − +
=
sin sin cos sin
cos cos cos
sin sin cos sin sin
, , ,
, , ,
, , ,
z z z
z z z
d d z z z
mess B mess B mess B
mess B mess B mess A
hor m mess A mess B mess A
γδ
γδ
γδ
γδ
2 2200
12 2 2
01 244444 344444
( ) ( )( )
⇒ = ⋅ ⋅ + ⋅d d z d zhor m mess A m mess B12
sin sin, ,
Gl. 4.6-18
Abb. 4.36 Einfluss der Refraktion auf die Horizontaldistanz, falls κ als Null angenommen wird.
Refraktionseinfluss auf Horizontaldistanzen (κ = 1)
02468
1012141618202224262830323436
0 1000 2000 3000 4000
Schrägdistanz dm [m]
| ∆d h
or| [
cm]
z = 60 oder 140 gon
z = 70 oder 130 gon
z = 80 oder 120 gon
z = 90 oder 110 gon
z = 95 oder 105 gon
z = 98 oder 102 gon
Refraktionseinfluss auf Horizontaldistanzen (κ = 0.2)
0
2
4
6
8
0 1000 2000 3000 4000
Schrägdistanz dm [m]
| ∆d h
or| [
cm]
z = 60 oder 140 gon
z = 70 oder 130 gon
z = 80 oder 120 gon
z = 90 oder 110 gon
z = 95 oder 105 gon
z = 98 oder 102 gon
−⋅⋅
⋅⋅
−⋅−
−⋅⋅
⋅⋅
−⋅= )κ(1ρR2
)sin(zdzsindκ)(1ρ
R2)sin(zd
zsind∆d naehmessm
messmmessm
messmhor
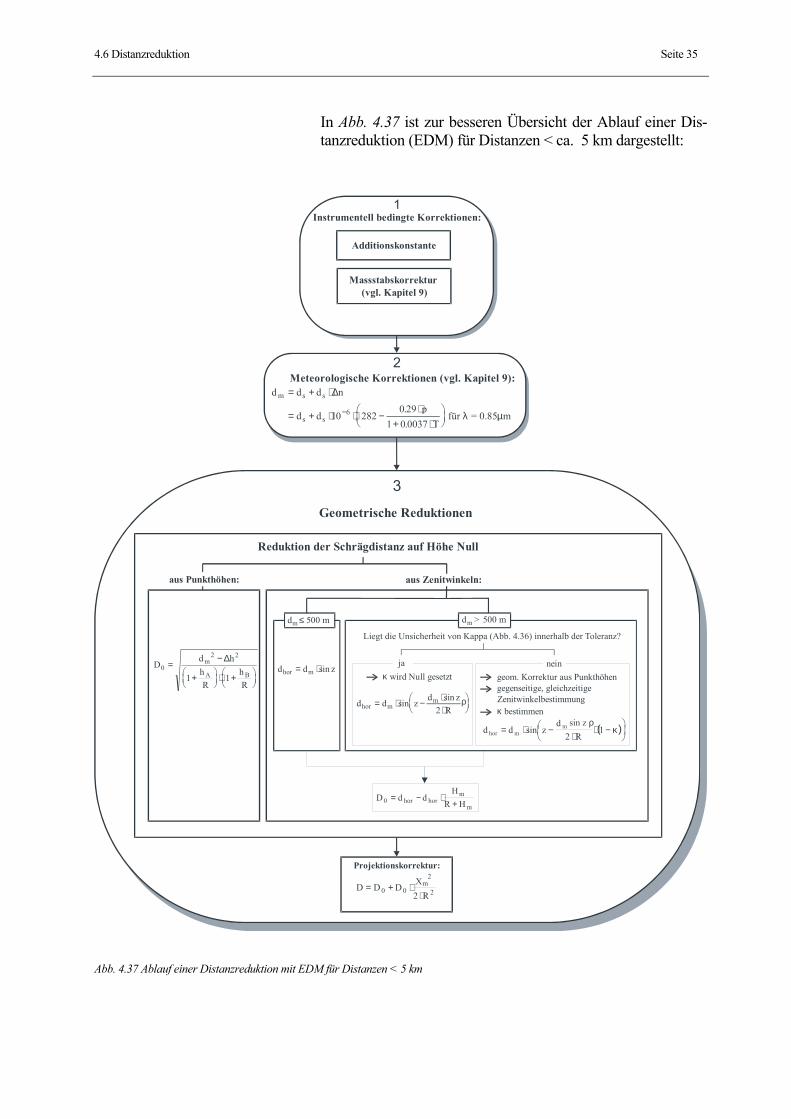
4.6 Distanzreduktion Seite 35
In Abb. 4.37 ist zur besseren Übersicht der Ablauf einer Dis-tanzreduktion (EDM) für Distanzen < ca. 5 km dargestellt:
Abb. 4.37 Ablauf einer Distanzreduktion mit EDM für Distanzen < 5 km
Meteorologische Korrektionen (vgl. Kapitel 9):2
Geometrische Reduktionen
3
d d d n
d dp
Tm
m s s
s s
= + ⋅
= + ⋅ ⋅ −⋅
+ ⋅
−
∆
10 2820 29
1 0 00376 .
.für = 0.85λ µ
Instrumentell bedingte Korrektionen:1
Additionskonstante
Massstabskorrektur (vgl. Kapitel 9)
Projektionskorrektur:
D D DRm= + ⋅
⋅0 0 22
aus Zenitwinkeln:
D d dH
R Hhor horm
m0 = − ⋅
+
d d z d zRhor m
m= ⋅ − ⋅⋅
sin sin2
κ wird Null gesetztja nein
geom. Korrektur aus Punkthöhen gegenseitige, gleichzeitige Zenitwinkelbestimmung κ bestimmen
( )d d zRhor m
m= ⋅ −⋅
⋅ −
sin
21 κ
dm ≤ 500 m
d d zhor m= ⋅sin
dm 500 m
Reduktion der Schrägdistanz auf Höhe Null
aus Punkthöhen:
Dd hhR
hR
m
A B0
2 2
1 1=
−
+
⋅ +
∆
Liegt die Unsicherheit von Kappa (Abb. 4.36) innerhalb der Toleranz?
>
d sin z ρ
ρ
X 2
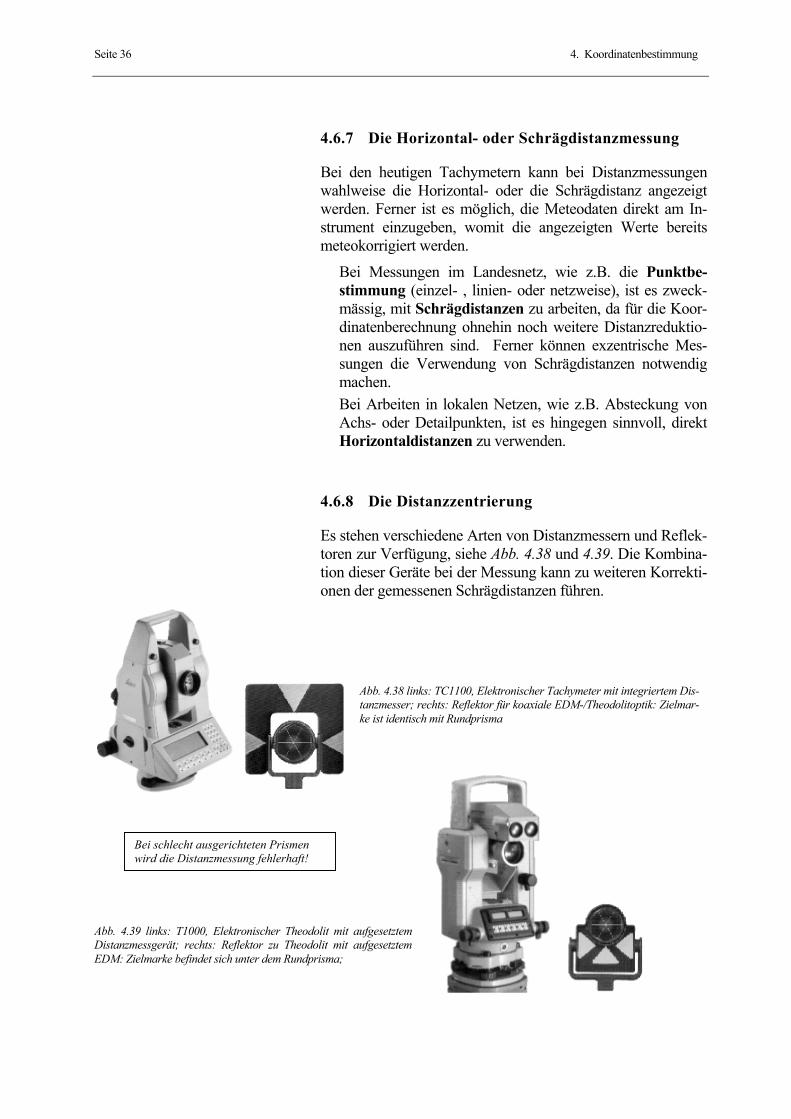
Seite 36 4. Koordinatenbestimmung
4.6.7 Die Horizontal- oder Schrägdistanzmessung
Bei den heutigen Tachymetern kann bei Distanzmessungen wahlweise die Horizontal- oder die Schrägdistanz angezeigt werden. Ferner ist es möglich, die Meteodaten direkt am In-strument einzugeben, womit die angezeigten Werte bereits meteokorrigiert werden.
Bei Messungen im Landesnetz, wie z.B. die Punktbe-stimmung (einzel- , linien- oder netzweise), ist es zweck-mässig, mit Schrägdistanzen zu arbeiten, da für die Koor-dinatenberechnung ohnehin noch weitere Distanzreduktio-nen auszuführen sind. Ferner können exzentrische Mes-sungen die Verwendung von Schrägdistanzen notwendig machen. Bei Arbeiten in lokalen Netzen, wie z.B. Absteckung von Achs- oder Detailpunkten, ist es hingegen sinnvoll, direkt Horizontaldistanzen zu verwenden.
4.6.8 Die Distanzzentrierung
Es stehen verschiedene Arten von Distanzmessern und Reflek-toren zur Verfügung, siehe Abb. 4.38 und 4.39. Die Kombina-tion dieser Geräte bei der Messung kann zu weiteren Korrekti-onen der gemessenen Schrägdistanzen führen.
Abb. 4.39 links: T1000, Elektronischer Theodolit mit aufgesetztemDistanzmessgerät; rechts: Reflektor zu Theodolit mit aufgesetztemEDM: Zielmarke befindet sich unter dem Rundprisma;
Bei schlecht ausgerichteten Prismen wird die Distanzmessung fehlerhaft!
Abb. 4.38 links: TC1100, Elektronischer Tachymeter mit integriertem Dis-tanzmesser; rechts: Reflektor für koaxiale EDM-/Theodolitoptik: Zielmar-ke ist identisch mit Rundprisma
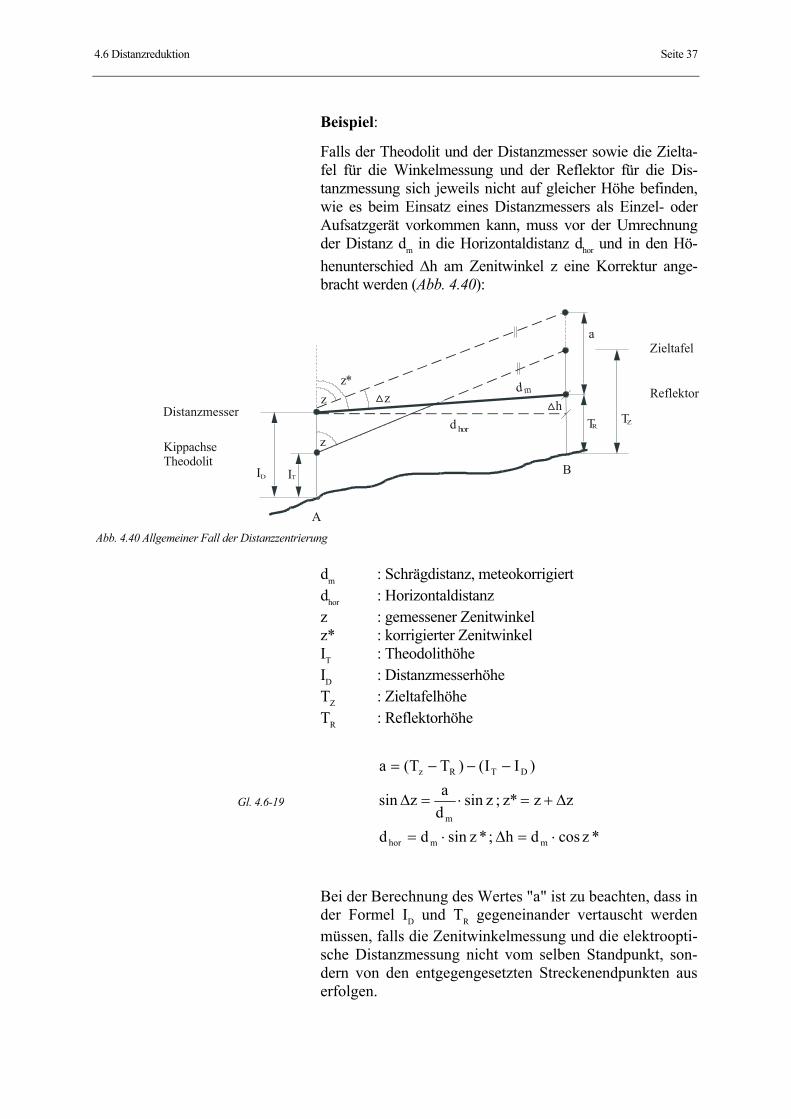
4.6 Distanzreduktion Seite 37
Beispiel:
Falls der Theodolit und der Distanzmesser sowie die Zielta-fel für die Winkelmessung und der Reflektor für die Dis-tanzmessung sich jeweils nicht auf gleicher Höhe befinden, wie es beim Einsatz eines Distanzmessers als Einzel- oder Aufsatzgerät vorkommen kann, muss vor der Umrechnung der Distanz dm in die Horizontaldistanz dhor und in den Hö-henunterschied ∆h am Zenitwinkel z eine Korrektur ange-bracht werden (Abb. 4.40):
dm : Schrägdistanz, meteokorrigiert dhor : Horizontaldistanz z : gemessener Zenitwinkel z* : korrigierter Zenitwinkel IT : Theodolithöhe ID : Distanzmesserhöhe TZ : Zieltafelhöhe TR : Reflektorhöhe
*zcosdh ; *zsindd
zz*z ; zsindazsin
)II()TT(a
mmhor
m
DTRz
⋅=∆⋅=
∆+=⋅=∆
−−−=
Bei der Berechnung des Wertes "a" ist zu beachten, dass in der Formel ID und TR gegeneinander vertauscht werden müssen, falls die Zenitwinkelmessung und die elektroopti-sche Distanzmessung nicht vom selben Standpunkt, son-dern von den entgegengesetzten Streckenendpunkten aus erfolgen.
Gl. 4.6-19
Abb. 4.40 Allgemeiner Fall der Distanzzentrierung
I I
dz
A
Zieltafel
ReflektorDistanzmesser
KippachseTheodolit
dz
z*z
T T
a
B
h

Seite 38 4. Koordinatenbestimmung
4.7 Die Exzentrische Richtungsmessung
Ist eine Station oder ein Zielpunkt nicht zugänglich, oder be-steht zwischen den beiden keine direkte Sichtverbindung, so wird von oder zu einem Exzentrum gemessen. Folgende Fäl-le sind denkbar:
- durch ein Hindernis (Haus, Baum) besteht keine direkte Sichtverbindung zwischen Stand- und Zielpunkt
- das Zentrum ist nicht zugänglich, z.B. ein Kirchturm - das Signal im Zielpunkt steht exzentrisch - exzentrisch mit GPS gemessene Standpunkte müssen mit
Triangulationspunkten verknüpft werden
4.7.1 Standpunktzentrierung
Gegeben: - Koordinaten der Punkte A, B Gemessen: - auf AExz die Richtungen Ri(A), Ri(B)
- die Distanz e auf [mm] *) Gesucht: - die reduzierte Richtung von A nach B Ri(AB)
Zur Lösung denke man sich die auf AExz beobach-tete Richtung Ri(B) parallel nach A verschoben. Da der dadurch entstehende Winkel γ auch in B auftritt, lässt sich Ri(AB) folgendermassen be-rechnen: Reduzierte Richtung bezogen auf A: Ri(AB) = Ri(B) - γ Die Konfiguration ist zu beachten: Liegt B rechts der Linie A-AExz, so ist die Ri(B) um den Wert γ zu reduzieren. Liegt B links der Linie A-AExz, so ist die Richtung Ri(B) um den Wert γ zu vergrös-sern.
.
AB B
AExz
γ γ
+ γ rechts − γlinks
..
AB B
AExzAExz
γ γ
+ γ rechts − γlinks
( ) ( )D X X Y YAB A B A B= − + −2 2
Ri(B)Ri(A)δ −=
sin sinγ δ= ⋅e
DABGl. 4.7-1
Abb. 4.41 Standpunktzentrierung
*) Damit eine Genauigkeits-einbusse der Richtungsmes-sung auf AExz bei der Zentrie-rung auf A minimiert wird,muss die Distanz e auf „mm“erfasst werden. Diese Mass-nahme gilt für alle Arten vonexzentrischen Richtungsmes-sungen. Siehe hierzu dasZahlenbeispiel Kap. 6.13.12Varianzfortpflanzung amBeispiel der Zielpunktzent-rierung.
.
A B
AExz
δ
γ
γ
Ri(A
)
Ri(B`)
Ri(B)
e
B`
Ri(AB)
..
A B
AExzAExz
δ
γ
γ
Ri(A
)
Ri(B`)
Ri(B)
e
B`
Ri(AB)
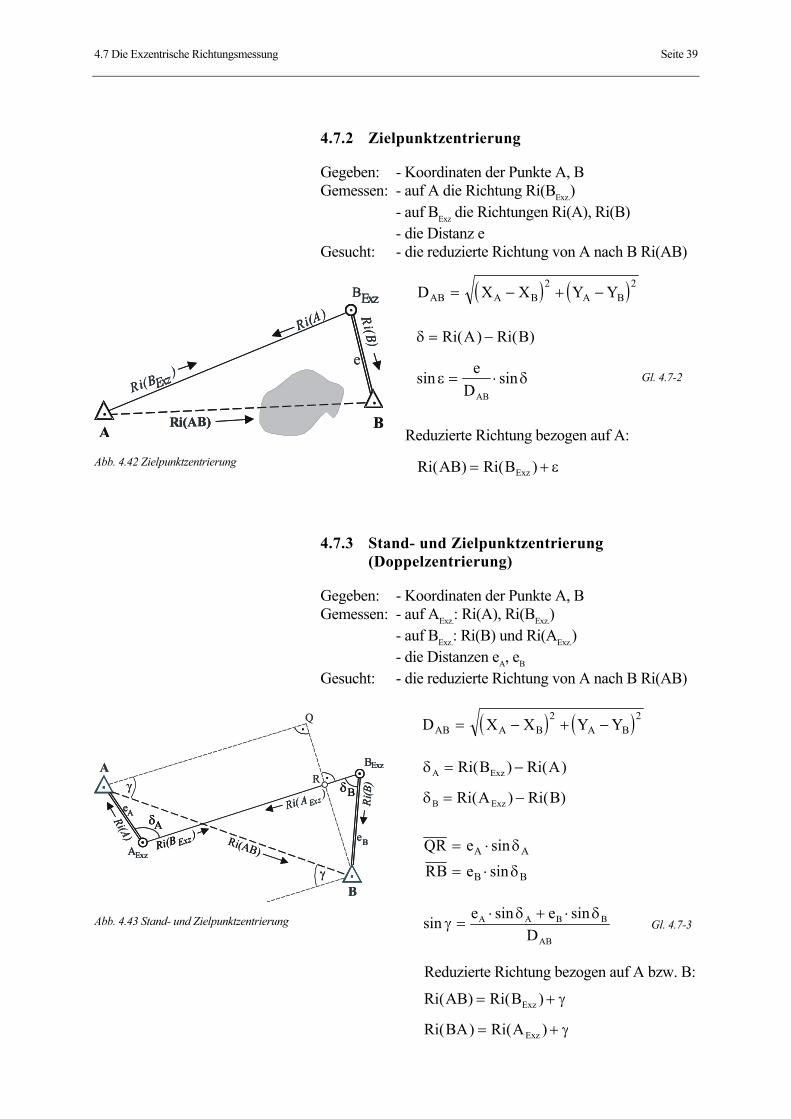
4.7 Die Exzentrische Richtungsmessung Seite 39
4.7.2 Zielpunktzentrierung
Gegeben: - Koordinaten der Punkte A, B Gemessen: - auf A die Richtung Ri(BExz.) - auf BExz die Richtungen Ri(A), Ri(B) - die Distanz e Gesucht: - die reduzierte Richtung von A nach B Ri(AB)
Reduzierte Richtung bezogen auf A:
4.7.3 Stand- und Zielpunktzentrierung (Doppelzentrierung)
Gegeben: - Koordinaten der Punkte A, B Gemessen: - auf AExz.: Ri(A), Ri(BExz.)
- auf BExz.: Ri(B) und Ri(AExz.) - die Distanzen eA, eB
Gesucht: - die reduzierte Richtung von A nach B Ri(AB)
Reduzierte Richtung bezogen auf A bzw. B:
( ) ( )D X X Y YAB A B A B= − + −2 2
δ = −Ri(A Ri(B) )
sin sinε δ= ⋅e
DAB
Ri(AB Ri(BExz) )= + ε
Gl. 4.7-2
Abb. 4.42 Zielpunktzentrierung
( ) ( )D X X Y YAB A B A B= − + −2 2
δA ExzRi(B Ri(A= −) )
δB ExzRi(A Ri(B= −) )
QR eRB e
A A
B B
= ⋅
= ⋅
sinsin
δ
δ
sin sin sinγ
δ δ=
⋅ + ⋅e eD
A A B B
AB
Ri(AB Ri(BExz) )= + γ
Ri(BA Ri(AExz) )= + γ
Gl. 4.7-3 Abb. 4.43 Stand- und Zielpunktzentrierung
ExzB
eExzBRi(
)
Ri(A )
Ri(AB)B
Ri(
)
.
A B. .
ExzBExzB
eExzBRi(
)ExzBRi(
)
Ri(A )Ri(A )
Ri(AB)Ri(AB)B
Ri(
)BR
i()
..
A B.. ..
B
Ri(B
)
E zxB
eB
eARi(A)
ExzARi()
Q
R
AExz
A
Ri(AB)
γ
.
γ
.
.
Ri(B)
Exz
δB
Aδ
.
B
Ri(B
)Ri
(B)
E zxBE zxB
eBeB
eAeARi(A)Ri(A)
ExzARi()
ExzARi()
Q
R
AExzAExz
A
Ri(AB)
γ
..
γ
..
..
Ri(B)
ExzRi(B)
Exz
δBδB
AδAδ
..
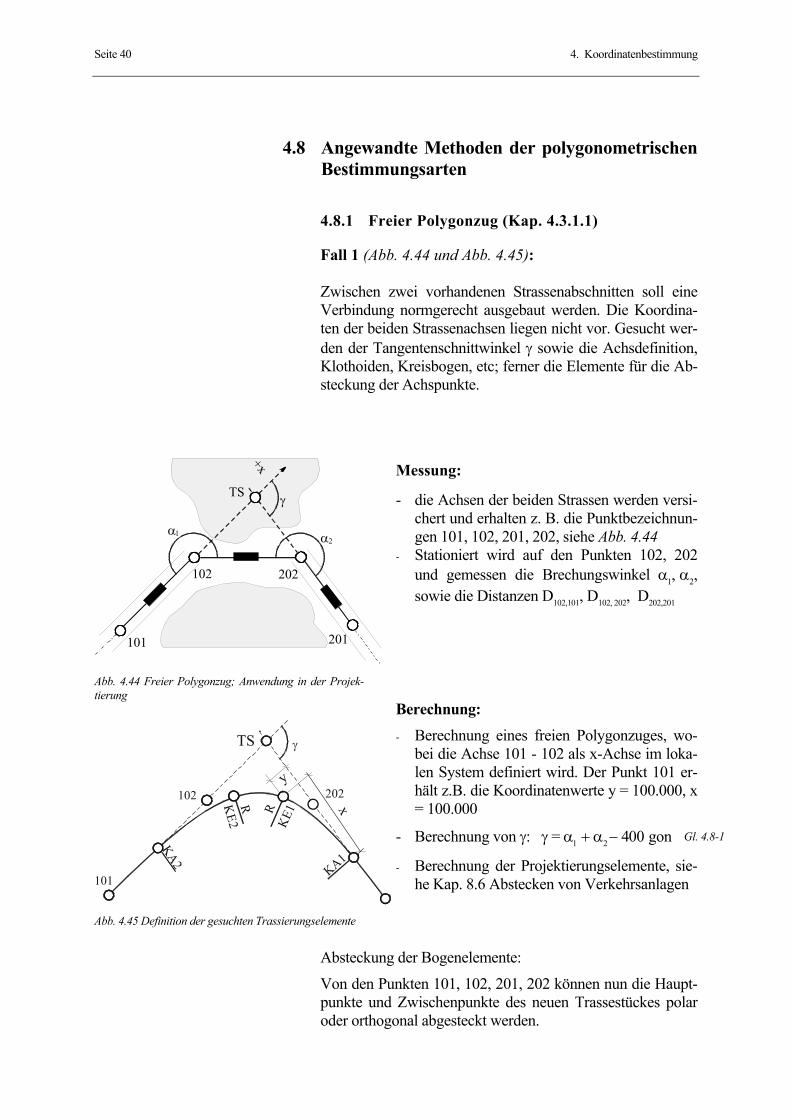
Seite 40 4. Koordinatenbestimmung
+x
γ
101
102 202
201
α1 α2
TS
4.8 Angewandte Methoden der polygonometrischen Bestimmungsarten
4.8.1 Freier Polygonzug (Kap. 4.3.1.1)
Fall 1 (Abb. 4.44 und Abb. 4.45): Zwischen zwei vorhandenen Strassenabschnitten soll eine Verbindung normgerecht ausgebaut werden. Die Koordina-ten der beiden Strassenachsen liegen nicht vor. Gesucht wer-den der Tangentenschnittwinkel γ sowie die Achsdefinition, Klothoiden, Kreisbogen, etc; ferner die Elemente für die Ab-steckung der Achspunkte.
Messung:
- die Achsen der beiden Strassen werden versi-chert und erhalten z. B. die Punktbezeichnun-gen 101, 102, 201, 202, siehe Abb. 4.44
- Stationiert wird auf den Punkten 102, 202 und gemessen die Brechungswinkel α1, α2, sowie die Distanzen D102,101, D102, 202, D202,201
Berechnung:
- Berechnung eines freien Polygonzuges, wo-bei die Achse 101 - 102 als x-Achse im loka-len System definiert wird. Der Punkt 101 er-hält z.B. die Koordinatenwerte y = 100.000, x = 100.000
- Berechnung von γ: γ = α1 + α2 − 400 gon
- Berechnung der Projektierungselemente, sie-he Kap. 8.6 Abstecken von Verkehrsanlagen
Absteckung der Bogenelemente:
Von den Punkten 101, 102, 201, 202 können nun die Haupt-punkte und Zwischenpunkte des neuen Trassestückes polar oder orthogonal abgesteckt werden.
Gl. 4.8-1
Abb. 4.44 Freier Polygonzug; Anwendung in der Projek-tierung
Abb. 4.45 Definition der gesuchten Trassierungselemente
γ
101
102
KA1
KE1RRK
E2
KA2
TS
x
202y
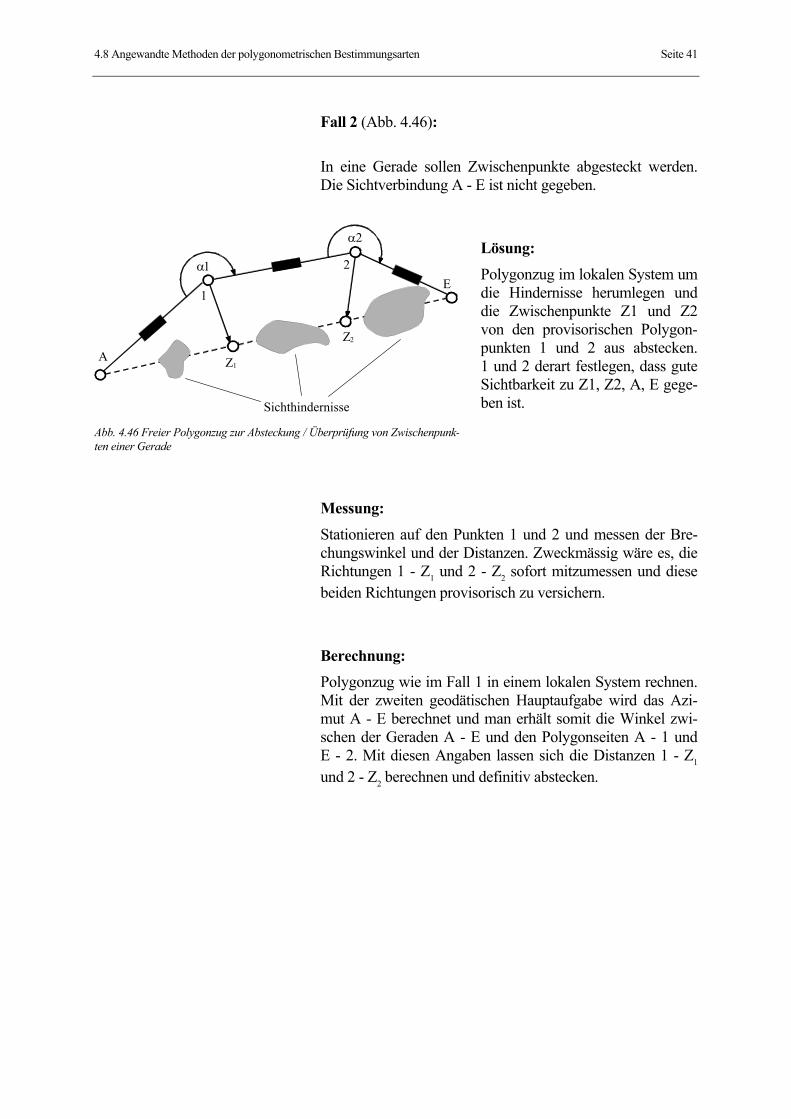
4.8 Angewandte Methoden der polygonometrischen Bestimmungsarten Seite 41
Fall 2 (Abb. 4.46):
In eine Gerade sollen Zwischenpunkte abgesteckt werden. Die Sichtverbindung A - E ist nicht gegeben.
Lösung:
Polygonzug im lokalen System um die Hindernisse herumlegen und die Zwischenpunkte Z1 und Z2 von den provisorischen Polygon-punkten 1 und 2 aus abstecken. 1 und 2 derart festlegen, dass gute Sichtbarkeit zu Z1, Z2, A, E gege-ben ist.
Messung: Stationieren auf den Punkten 1 und 2 und messen der Bre-chungswinkel und der Distanzen. Zweckmässig wäre es, die Richtungen 1 - Z1 und 2 - Z2 sofort mitzumessen und diese beiden Richtungen provisorisch zu versichern.
Berechnung: Polygonzug wie im Fall 1 in einem lokalen System rechnen. Mit der zweiten geodätischen Hauptaufgabe wird das Azi-mut A - E berechnet und man erhält somit die Winkel zwi-schen der Geraden A - E und den Polygonseiten A - 1 und E - 2. Mit diesen Angaben lassen sich die Distanzen 1 - Z1 und 2 - Z2 berechnen und definitiv abstecken.
1
2
A
E
Z1
Z2
α1
α2
Sichthindernisse
Abb. 4.46 Freier Polygonzug zur Absteckung / Überprüfung von Zwischenpunk-ten einer Gerade

Seite 42 4. Koordinatenbestimmung
4.8.2 Beidseitig nach Koordinaten angeschlossener Polygonzug (Kap. 4.3.1.3)
4.8.2.1 Einleitung
Bei dieser Methode der polygonometrischen Koordinatenbe-stimmung von Neupunkten werden nur die Anfangs- und Endpunkte des Zuges verwendet. Gemessen werden dement-sprechend nur die Brechungswinkel auf den Neupunkten und die Distanzen vom Anfangs- über die Neupunkte zum End-punkt, hin und zurück (Schrägdistanzen und Zenitwinkel), siehe Abb. 4.47.
Dies bedeutet aber, dass Anfangs- und Endpunkt geprüft sein müssen, also ob die Koordinatenwerte dieser Punkte mit der örtlichen Punktversi-cherung (Punktlage) übereinstimmen. Diese Prüfung kann erfolgen mit einer Abriss-Bestimmung, siehe Kap. 4.5 oder mit einer Punktweisen Bestim-mung, wie Freie Stationierung, Kap. 4.3.2.6, Rückwärtseinschneiden, Kap. 4.3.2.5 etc.
Zuerst erfolgt die Berechnung als einseitig nach Koordinaten ange-schlossener Polygonzug ausgehend vom Anfangspunkt A. Anschlies-send wird durch eine Drehstreckung, die Koordinaten des provisorischen Endpunktes E auf die definitiven Endpunktkoordinaten E eingepasst, siehe Abb. 4.48. Die Geometrie des Zuges wird hierbei nicht verändert. Wirksam sind nur die Brechungs-winkel und die Distanzen im Gegen-satz zur Methode Kap. 4.8.3 "Beid-seitig nach Koordinaten und Rich-tungen angeschlossener Polygon-zug", wo die Richtungsmessungen zu den Anschlusspunkten auf An-fangs- und Endpunkt die Geometrie des Zuges verändern können, also die Werte der Brechungswinkel ver-ändert werden.
21
AE
αα1 2
Abb. 4.47 Netzplan für beidseitig nach Koordinaten angeschlossenenPolygonzug
Abb. 4.48 Berechnungsmodell
21
A
E
αα1
2
2
1
Eα
α1
2
Y
X
ϕ
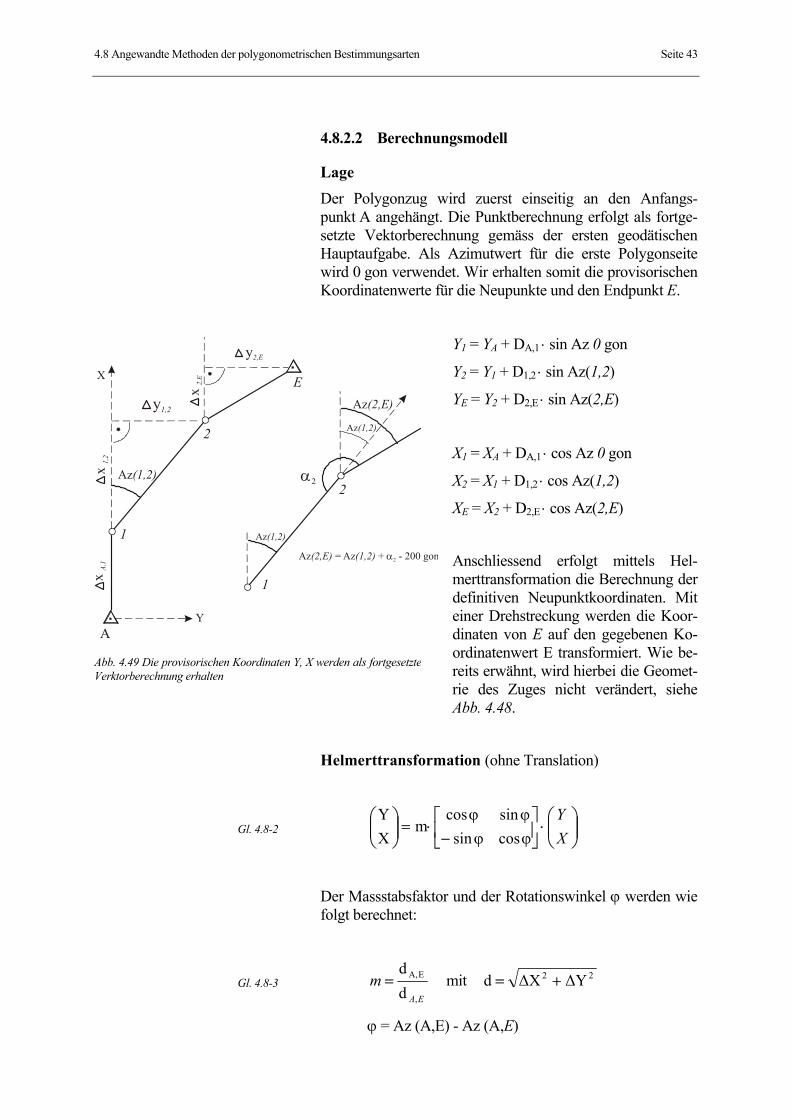
4.8 Angewandte Methoden der polygonometrischen Bestimmungsarten Seite 43
4.8.2.2 Berechnungsmodell
Lage
Der Polygonzug wird zuerst einseitig an den Anfangs-punkt A angehängt. Die Punktberechnung erfolgt als fortge-setzte Vektorberechnung gemäss der ersten geodätischen Hauptaufgabe. Als Azimutwert für die erste Polygonseite wird 0 gon verwendet. Wir erhalten somit die provisorischen Koordinatenwerte für die Neupunkte und den Endpunkt E.
Y1 = YA + DA,1 ⋅ sin Az 0 gon
Y2 = Y1 + D1,2 ⋅ sin Az(1,2)
YE = Y2 + D2,E ⋅ sin Az(2,E)
X1 = XA + DA,1 ⋅ cos Az 0 gon
X2 = X1 + D1,2 ⋅ cos Az(1,2)
XE = X2 + D2,E ⋅ cos Az(2,E)
Anschliessend erfolgt mittels Hel-merttransformation die Berechnung der definitiven Neupunktkoordinaten. Mit einer Drehstreckung werden die Koor-dinaten von E auf den gegebenen Ko-ordinatenwert E transformiert. Wie be-reits erwähnt, wird hierbei die Geomet-rie des Zuges nicht verändert, siehe Abb. 4.48.
Helmerttransformation (ohne Translation)
⋅
−
⋅=
XY
ϕϕϕϕ
cossinsincos
mXY
Der Massstabsfaktor und der Rotationswinkel ϕ werden wie folgt berechnet:
EA
m,
EA,
dd
= mit 22 ∆Y∆Xd +=
ϕ = Az (A,E) - Az (A,E)
A
2
1
E
Y
2
1
α2Az(1,2)x
1,2
y1,2
y2,E
x 2,
E
x A,
1
Az(1,2)
Az = Az + - 200 gon(2,E) (1,2) α2
Az(1,2)
Az(2,E)
X
Abb. 4.49 Die provisorischen Koordinaten Y, X werden als fortgesetzteVerktorberechnung erhalten
Gl. 4.8-2
Gl. 4.8-3
Seite 44 4. Koordinatenbestimmung
Lagegenauigkeit Das Excel-Programm verlangt die Eingabe der Lagegenau-igkeiten von Α und Ε. Diese Angaben können aus der Koor-dinatendatei entnommen oder durch Messung/Berechnung bestimmt werden. Das Programm vergleicht den berechneten Massstabsfaktor „m“ mit dem Wert aus den eingegebenen Lagegenauigkeiten
2E
2AtotD)m1( σ+σ≤⋅−
Falls der Wert "m" grösser ist, so erfolgt eine Warnung. Die Messwerte, bzw. die eingegebenen Punktgenauigkeiten sind dann zu überprüfen.
Höhe
Die Höhenunterschiede ∆hi zwischen benachbarten Punkten werden aus den Horizontaldistanzen Di im Projektionssystem (siehe Eingabe Lage) und den Zenitwinkeln z hin und rück berechnet, siehe Kap. 5.5 Trigonometrische Höhenbestim-mung:
[ ])SIzcotD()SIzcotD(21h rrrr,ihhhh,ii −+⋅+−+⋅=∆
Massgebend für das Vorzeichen für ∆hi ist der Wert zh
Die Höhen der Neupunkte werden zuerst durch polares An-hängen einseitig an den Anfangspunkt berechnet. Um Ver-wechslungen von Instrumenten- und Signalhöhe oder Mess- und Eingabefehler zu erkennen, kontrolliert das Programm jeweils mit Hilfe der folgenden Formel jeden Schritt des po-laren Anhängens. Es gilt:
( ) ( )( )n
σσSIzcotDSIzcotD
2E
2A
rrri,rhhhi,h+
≤−−⋅−−+⋅ wo
bei n: Anzahl Teilstrecken ist
Die Eingabe der Höhengenauigkeiten für Α und Ε werden vom Programm für die Berechnungen der ∆hi und den Wi-derspruch WH verlangt.
Gl. 4.8-4
Gl. 4.8-5
Gl. 4.8-6
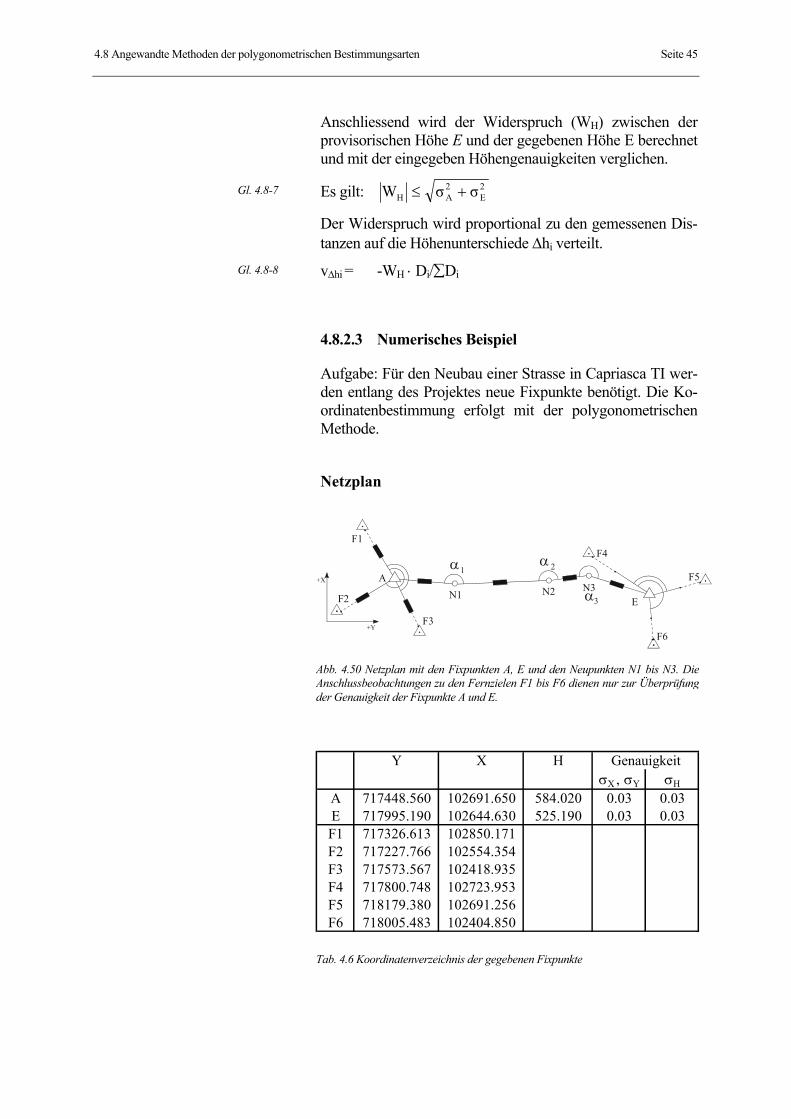
4.8 Angewandte Methoden der polygonometrischen Bestimmungsarten Seite 45
Anschliessend wird der Widerspruch (WH) zwischen der provisorischen Höhe E und der gegebenen Höhe E berechnet und mit der eingegeben Höhengenauigkeiten verglichen.
Es gilt: 2E
2AH σσW +≤
Der Widerspruch wird proportional zu den gemessenen Dis-tanzen auf die Höhenunterschiede ∆hi verteilt.
v∆hi = -WH ⋅ Di/∑Di
4.8.2.3 Numerisches Beispiel
Aufgabe: Für den Neubau einer Strasse in Capriasca TI wer-den entlang des Projektes neue Fixpunkte benötigt. Die Ko-ordinatenbestimmung erfolgt mit der polygonometrischen Methode.
Netzplan
Gl. 4.8-7
Gl. 4.8-8
Abb. 4.50 Netzplan mit den Fixpunkten A, E und den Neupunkten N1 bis N3. DieAnschlussbeobachtungen zu den Fernzielen F1 bis F6 dienen nur zur Überprüfungder Genauigkeit der Fixpunkte A und E.
Y X HσX , σY σH
A 717448.560 102691.650 584.020 0.03 0.03E 717995.190 102644.630 525.190 0.03 0.03F1 717326.613 102850.171F2 717227.766 102554.354F3 717573.567 102418.935F4 717800.748 102723.953F5 718179.380 102691.256F6 718005.483 102404.850
Genauigkeit
Tab. 4.6 Koordinatenverzeichnis der gegebenen Fixpunkte
+X
+Y
A
EN1 N2 N3
F1
F2
F3
F4
F5
F6
α 1α 2
α3

Seite 46 4. Koordinatenbestimmung
Messvorschrift siehe dazu Tab. 4.7 Messprogramm und Abb. 4.50 Netzplan
- Zwangszentrierung, siehe Kap. 2.4
- Richtungsmessung: hier als Beispiel nur ein Satz. In der Praxis sollten im Sinne der Zuverlässigkeits- und Genau-igkeitsforderungen zwei oder mehr Sätze gemessen wer-den.
- Distanzmessung: hin und rück
- Zenitwinkelmessung: hin und rück, je ein Satz
- Die Lagen der Fixpunkte A, E sind zu überprüfen. Auf „A“ können Distanzen zu den Fernzielen F1 bis F3 ge-messen werden, somit kann mit der Methode der Freien Stationierung (Kap. 4.9.4) die Prüfung erfolgen. Auf „E“ können nur Richtungen zu den Fernzielen F4 bis F6 ge-messen werden, somit erfolgt hier die Prüfung mittels Ab-riss.
Messprogramm
Stations-punkt
Ziel-punkt
Richt.-winkel
Zenit-winkel Dist. I S
A F1 × × × × ×
F2 × × × ×
F3 × × × ×
N1 × × ×
N1 A × × × × ×
N2 × × × ×
N2 N1 × × × × ×
N3 × × × ×
N3 N2 × × × × ×
E × × × ×
E N2 × × × ×
F4 ×
F5 ×
F6 ×
Tab. 4.7 Messprogramm
Das Messprogramm ist eine verbaleForm des Netzplanes. Neben derReihenfolge der Aktivitäten enthältes Angaben über das Instrumentari-um, was, wann, wo zu installierenist. Ferner sind in der Liste manuellerfasste Daten zu notieren, wieInstrumenten-, Reflektorhöhe überder Punktversicherung, etc.
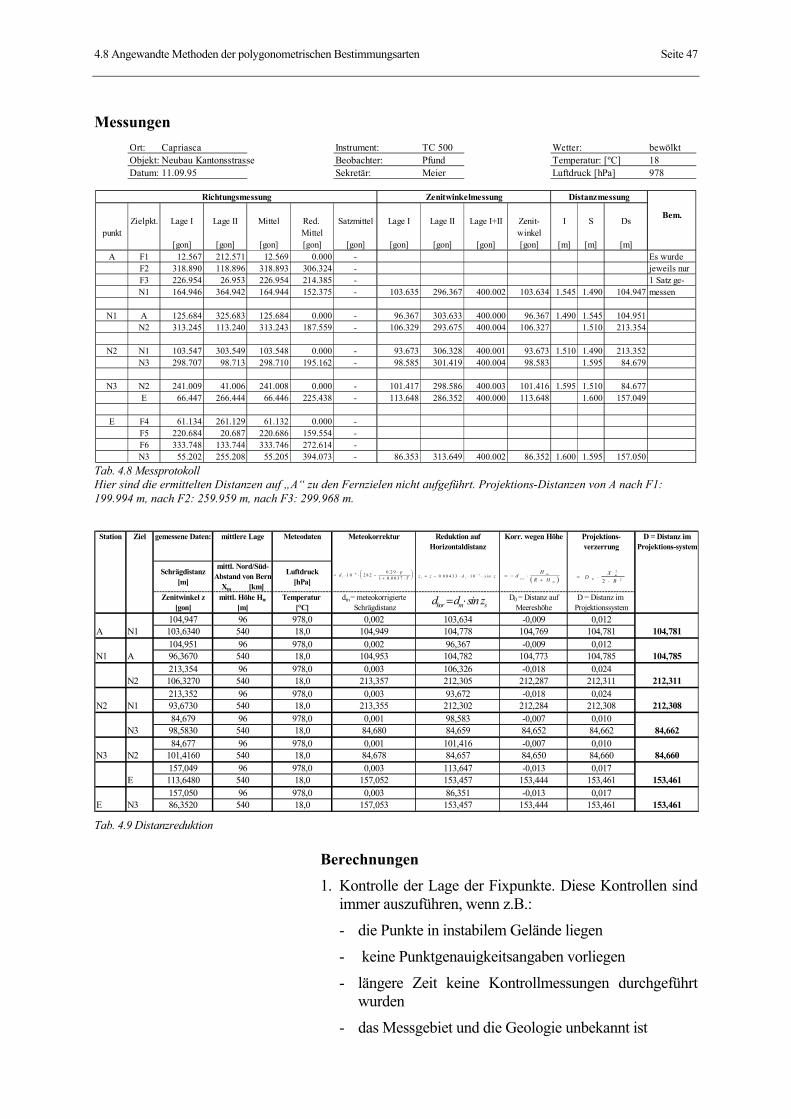
4.8 Angewandte Methoden der polygonometrischen Bestimmungsarten Seite 47
Messungen
Berechnungen 1. Kontrolle der Lage der Fixpunkte. Diese Kontrollen sind
immer auszuführen, wenn z.B.:
- die Punkte in instabilem Gelände liegen
- keine Punktgenauigkeitsangaben vorliegen
- längere Zeit keine Kontrollmessungen durchgeführt wurden
- das Messgebiet und die Geologie unbekannt ist
Ort: Capriasca Instrument: TC 500 Wetter: bewölktObjekt: Neubau Kantonsstrasse Beobachter: Pfund Temperatur: [ºC] 18Datum: 11.09.95 Sekretär: Meier Luftdruck [hPa] 978
Richtungsmessung Zenitwinkelmessung Distanzmessung
Zielpkt. Lage I Lage II Mittel Red. Satzmittel Lage I Lage II Lage I+II Zenit- I S Ds Bem.
punkt Mittel winkel[gon] [gon] [gon] [gon] [gon] [gon] [gon] [gon] [gon] [m] [m] [m]
A F1 12.567 212.571 12.569 0.000 - Es wurdeF2 318.890 118.896 318.893 306.324 - jeweils nurF3 226.954 26.953 226.954 214.385 - 1 Satz ge-N1 164.946 364.942 164.944 152.375 - 103.635 296.367 400.002 103.634 1.545 1.490 104.947 messen
N1 A 125.684 325.683 125.684 0.000 - 96.367 303.633 400.000 96.367 1.490 1.545 104.951N2 313.245 113.240 313.243 187.559 - 106.329 293.675 400.004 106.327 1.510 213.354
N2 N1 103.547 303.549 103.548 0.000 - 93.673 306.328 400.001 93.673 1.510 1.490 213.352N3 298.707 98.713 298.710 195.162 - 98.585 301.419 400.004 98.583 1.595 84.679
N3 N2 241.009 41.006 241.008 0.000 - 101.417 298.586 400.003 101.416 1.595 1.510 84.677E 66.447 266.444 66.446 225.438 - 113.648 286.352 400.000 113.648 1.600 157.049
E F4 61.134 261.129 61.132 0.000 -F5 220.684 20.687 220.686 159.554 -F6 333.748 133.744 333.746 272.614 -N3 55.202 255.208 55.205 394.073 - 86.353 313.649 400.002 86.352 1.600 1.595 157.050
Tab. 4.8 Messprotokoll Hier sind die ermittelten Distanzen auf „A“ zu den Fernzielen nicht aufgeführt. Projektions-Distanzen von A nach F1: 199.994 m, nach F2: 259.959 m, nach F3: 299.968 m.
Station Ziel gemessene Daten: mittlere Lage Meteodaten Meteokorrektur Reduktion auf Horizontaldistanz
Korr. wegen Höhe Projektions-verzerrung
D = Distanz im Projektions-system
Schrägdistanz [m]
mittl. Nord/Süd-Abstand von Bern
Xm [km]
Luftdruck [hPa]
Zenitwinkel z mittl. Höhe Hm Temperatur dm = meteokorrigierte D0 = Distanz auf D = Distanz im [gon] [m] [°C] Schrägdistanz Meereshöhe Projektionssystem
104,947 96 978,0 0,002 103,634 -0,009 0,012A N1 103,6340 540 18,0 104,949 104,778 104,769 104,781 104,781
104,951 96 978,0 0,002 96,367 -0,009 0,012N1 A 96,3670 540 18,0 104,953 104,782 104,773 104,785 104,785
213,354 96 978,0 0,003 106,326 -0,018 0,024N2 106,3270 540 18,0 213,357 212,305 212,287 212,311 212,311
213,352 96 978,0 0,003 93,672 -0,018 0,024N2 N1 93,6730 540 18,0 213,355 212,302 212,284 212,308 212,308
84,679 96 978,0 0,001 98,583 -0,007 0,010N3 98,5830 540 18,0 84,680 84,659 84,652 84,662 84,662
84,677 96 978,0 0,001 101,416 -0,007 0,010N3 N2 101,4160 540 18,0 84,678 84,657 84,650 84,660 84,660
157,049 96 978,0 0,003 113,647 -0,013 0,017E 113,6480 540 18,0 157,052 153,457 153,444 153,461 153,461
157,050 96 978,0 0,003 86,351 -0,013 0,017E N3 86,3520 540 18,0 157,053 153,457 153,444 153,461 153,461
= ⋅ ⋅ −⋅
+ ⋅
−dp
Ts 1 0 2 8 20 2 9
1 0 0 0 3 76 .
. ( )= − ⋅+
dH
R Hh o r
m
m= ⋅
⋅D
XRm
0
2
22
d d zhor m s= ⋅sin
z z d zs s= − ⋅ ⋅ ⋅−0 0 0 4 3 3 1 0 3. s i n
Tab. 4.9 Distanzreduktion

Seite 48 4. Koordinatenbestimmung
Lagekontrolle von A mit Freie Stationierung
Fazit: Der Koordinatenwert für A hat sich aus der Messung bestätigt. Als La-gegenauigkeit, sind 2.1 cm ausgewie-sen, darum wird in der Koordinatenbe-rechnung 3.0 cm angenommen
Lagekontrolle von E mit Abriss
Fazit: Als Lagegenauigkeit für Punkt E kann 3.0 cm angenommen werden. Die maximale Verbesserung für den Punkt F6 ergibt eine Querabweichung von 1.4 cm. Berechnung siehe Kap. 1 Abschät-zungsformeln
Neupunkt: A Anzahl Fixpunkte: 3
EingabetabellePunkt Landeskoordinaten Messungen
Y X D reduziert Hz-RichtungF1 717326,613 102850,171 199,994 0,0000F2 717227,766 102554,354 259,959 306,3240F3 717573,567 102418,935 299,968 214,3850
AusgabetabelleNeupunkt Standardabweichungen Parameter
A sY = 12,3 mm a 0,7927sX = 8,4 mm b -0,6098
sX,Y = 21,1 mm Kontrolle:Koordinaten a2+b2 = 1,0002
Y X m 1,0001717448,560 102691,650 Drehwinkel 158,2558
EingabetabelleStandpunkt Anschlusspunkte
Koordinaten KoordinatenPunkt Y X Punkt Y X
E 717995,190 102644,630 F4 717800,748 102723,953Neupunkte F5 718179,380 102691,256
Punkt F6 718005,483 102404,850
Punkt Gerechn. Beob. Az-R Orientierte VerbesserungenAzimut Richtung R Omitt. Richtung v+ v-[gon] [gon] [gon] (R + Omitt.) [mgon] [mgon]
F4 324,6590 0,0000 324,6590 324,6587 0,3F5 84,2161 159,5540 324,6621 84,2127 3,5F6 197,2689 272,6140 324,6549 197,2727 -3,8
Omitt. = 324,6587 ∑ 3,8 -3,8
Tab. 4.10 Freie Stationierung, Berechnung der Koordinaten des Punktes A
Tab. 4.11 Abriss. Berechnung auf Punkt E
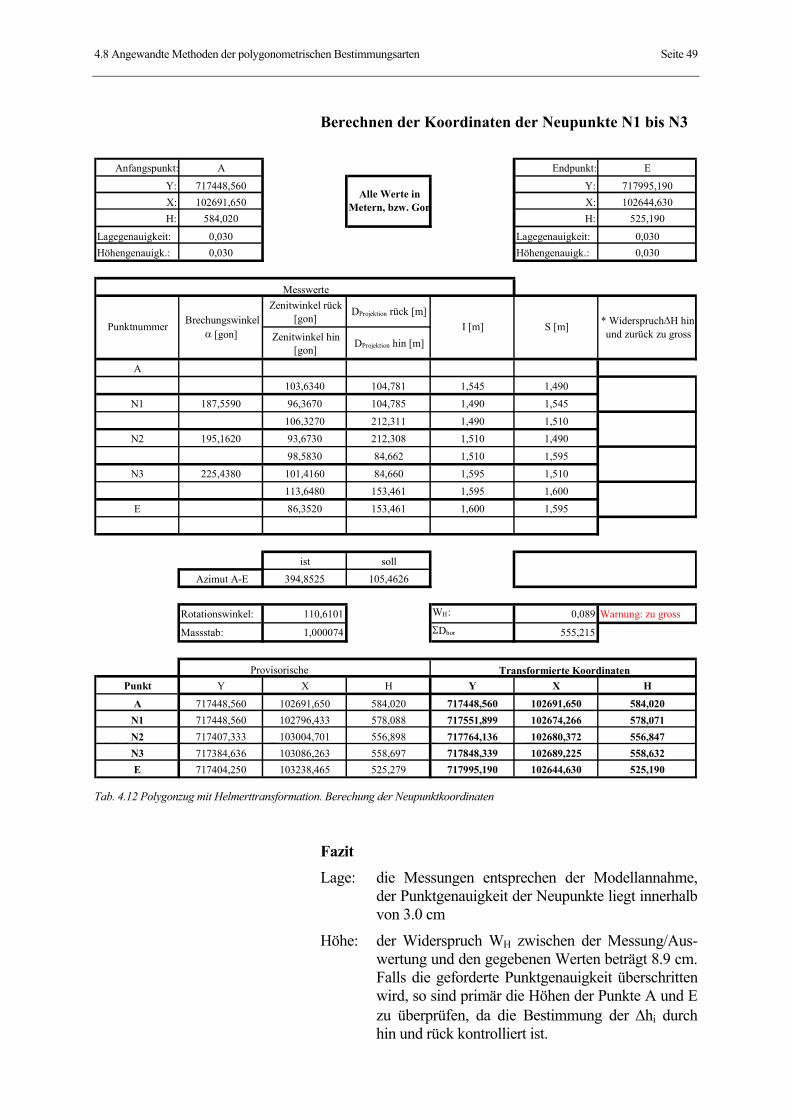
4.8 Angewandte Methoden der polygonometrischen Bestimmungsarten Seite 49
Berechnen der Koordinaten der Neupunkte N1 bis N3
Fazit
Lage: die Messungen entsprechen der Modellannahme, der Punktgenauigkeit der Neupunkte liegt innerhalb von 3.0 cm
Höhe: der Widerspruch WH zwischen der Messung/Aus-wertung und den gegebenen Werten beträgt 8.9 cm. Falls die geforderte Punktgenauigkeit überschritten wird, so sind primär die Höhen der Punkte A und E zu überprüfen, da die Bestimmung der ∆hi durch hin und rück kontrolliert ist.
Tab. 4.12 Polygonzug mit Helmerttransformation. Berechung der Neupunktkoordinaten
Anfangspunkt: A Endpunkt: E Y: 717448,560 Y: 717995,190X: 102691,650 X: 102644,630H: 584,020 H: 525,190
Lagegenauigkeit: 0,030 Lagegenauigkeit: 0,030Höhengenauigk.: 0,030 Höhengenauigk.: 0,030
Zenitwinkel rück [gon] DProjektion rück [m]
Zenitwinkel hin [gon] DProjektion hin [m]
A 103,6340 104,781 1,545 1,490
N1 187,5590 96,3670 104,785 1,490 1,545 106,3270 212,311 1,490 1,510
N2 195,1620 93,6730 212,308 1,510 1,490 98,5830 84,662 1,510 1,595
N3 225,4380 101,4160 84,660 1,595 1,510 113,6480 153,461 1,595 1,600
E 86,3520 153,461 1,600 1,595
ist soll
Azimut A-E 394,8525 105,4626
Rotationswinkel: 110,6101 WΗ: 0,089 Warnung: zu gross
Massstab: 1,000074 ΣDhor 555,215
Punkt Y X H Y X H A 717448,560 102691,650 584,020 717448,560 102691,650 584,020
N1 717448,560 102796,433 578,088 717551,899 102674,266 578,071N2 717407,333 103004,701 556,898 717764,136 102680,372 556,847N3 717384,636 103086,263 558,697 717848,339 102689,225 558,632E 717404,250 103238,465 525,279 717995,190 102644,630 525,190
Provisorische Transformierte Koordinaten
* Widerspruch ∆H hin und zurück zu gross
Punktnummer Brechungswinkel α [gon]
I [m] S [m]
Alle Werte in Metern, bzw. Gon
Messwerte
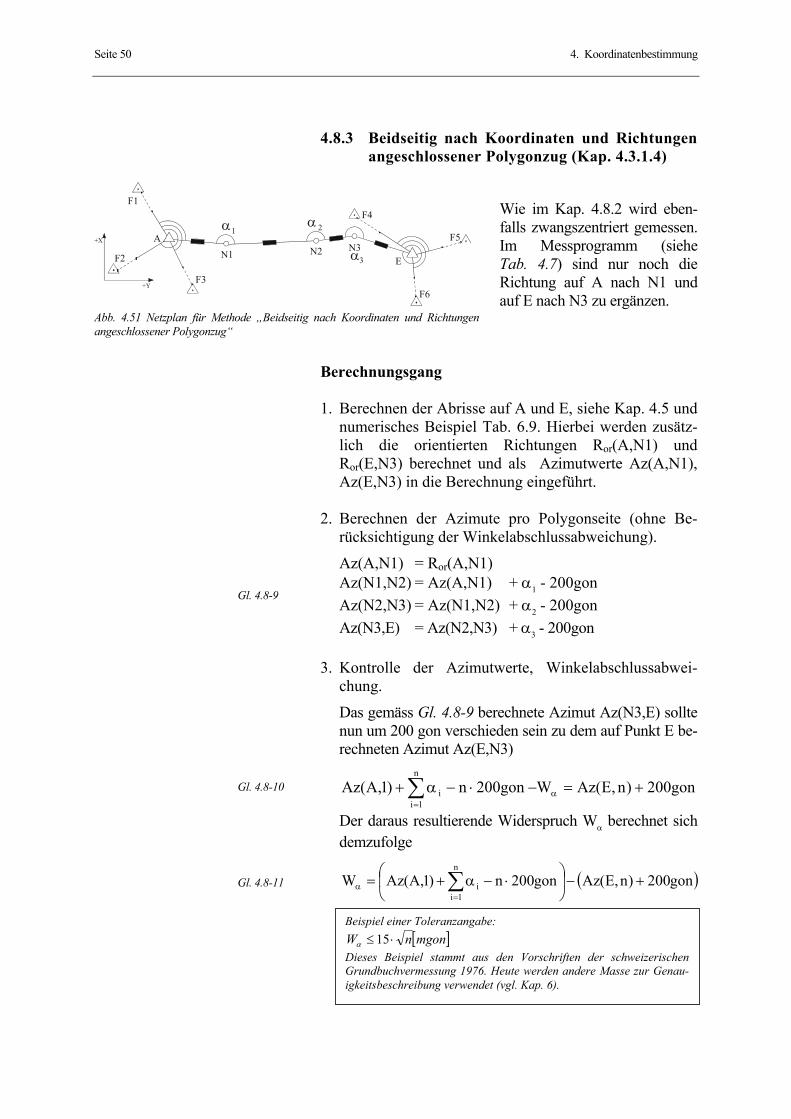
Seite 50 4. Koordinatenbestimmung
4.8.3 Beidseitig nach Koordinaten und Richtungen angeschlossener Polygonzug (Kap. 4.3.1.4)
Wie im Kap. 4.8.2 wird eben-falls zwangszentriert gemessen. Im Messprogramm (siehe Tab. 4.7) sind nur noch die Richtung auf A nach N1 und auf E nach N3 zu ergänzen.
Berechnungsgang 1. Berechnen der Abrisse auf A und E, siehe Kap. 4.5 und
numerisches Beispiel Tab. 6.9. Hierbei werden zusätz-lich die orientierten Richtungen Ror(A,N1) und Ror(E,N3) berechnet und als Azimutwerte Az(A,N1), Az(E,N3) in die Berechnung eingeführt.
2. Berechnen der Azimute pro Polygonseite (ohne Be-
rücksichtigung der Winkelabschlussabweichung).
Az(A,N1) = Ror(A,N1) Az(N1,N2) = Az(A,N1) + α1 - 200gon Az(N2,N3) = Az(N1,N2) + α2 - 200gon Az(N3,E) = Az(N2,N3) + α3 - 200gon 3. Kontrolle der Azimutwerte, Winkelabschlussabwei-
chung.
Das gemäss Gl. 4.8-9 berechnete Azimut Az(N3,E) sollte nun um 200 gon verschieden sein zu dem auf Punkt E be-rechneten Azimut Az(E,N3)
gon200)n,E(AzWgon200n)1,A(Azn
1ii +=−⋅−α+ α
=∑
Der daraus resultierende Widerspruch Wα berechnet sich demzufolge
( )gon200)n,E(Azgon200n)1,A(AzWn
1ii +−
⋅−α+= ∑
=α
Beispiel einer Toleranzangabe: [ ]mgonnW ⋅≤ 15α
Dieses Beispiel stammt aus den Vorschriften der schweizerischenGrundbuchvermessung 1976. Heute werden andere Masse zur Genau-igkeitsbeschreibung verwendet (vgl. Kap. 6).
Abb. 4.51 Netzplan für Methode „Beidseitig nach Koordinaten und Richtungenangeschlossener Polygonzug“
Gl. 4.8-9
Gl. 4.8-10
Gl. 4.8-11
+X
+Y
A
EN1 N2 N3
F1
F2
F3
F4
F5
F6
α 1α 2
α3
4.8 Angewandte Methoden der polygonometrischen Bestimmungsarten Seite 51
Liegt der Wert Wα, Winkelabschlussabweichung genannt, innerhalb der vorgegebenen Toleranz, so wird dieser als Verbesserung vαi
auf die Brechungswinkel αi verteilt und die Azimute pro Polygonseite mit den verbesserten Bre-chungswinkeln neu berechnet.
4. Definitive Berechnung der Azimute pro Polygonseite.
Da alle Brechungswinkel mit gleicher Genauigkeit ge-messen werden, so wird
Wα gleichmässig auf alle Brechungswinkel verteilt
5. Berechnen der Koordinatendifferenzen.
Diese erfolgt als fortgesetzte Vektorberechnung gemäss der ersten geodätischen Hauptaufgabe
YN1 = YA + DA,N1 ⋅ sin Az(A,N1)
: YE = Y3 + DN3,E ⋅ sin Az(N3,E) XN1 = XA + DA,N1 ⋅ cos Az(A,N1)
: XE = X3 + DN3,E ⋅ cos Az(N3,E)
6. Kontrolle der Koordinatendifferenzen, Widersprüche für Y, X
Als Ergebnis der fortgesetzten Vektorberechnung sollten die Koordinatenwerte für den Endpunkt E mit den gege-benen Koordinaten übereinstimmen.
YA + Σ∆Yi = YE (Ist)
XA + Σ∆Xi = XE (Ist)
Eventuelle Widersprüche berechnen sich wie folgt:
WY = YE (Ist) - YE (Soll)
WX = XE (Ist) - XE (Soll)
v Wniα
α=−
Gl. 4.8-12
Gl. 4.8-13
Gl. 4.8-14
Gl. 4.8-15
Gl. 4.8-16

Seite 52 4. Koordinatenbestimmung
7. Definitive Berechnung der Neupunktkoordinaten.
Liegen die Widersprüche innerhalb der vorgegebenen Tole-ranz, so werden die Widersprüche proportional zur Distanz auf die ∆Yi, ∆Xi verteilt.
Anmerkung zur Berechnung der Höhen:
Die Differenzen zu den Werten aus Tab. 4.12 im mm-Bereich , sind darauf zurückzuführen, dass in Tab. 4.13 die ∆hi nicht als Mittel aus der Hin- und Rück-messung berechnet sind.
v W DDY
Y i
ii∆ =
− ⋅
∑ v W D
DXX i
ii∆ =
− ⋅
∑
Anfangspunkt: A Endpunkt: EY: 717448,560 Y: 717995,190X: 102691,650 X: 102644,630H: 584,020 H: 525,190
Or. Richtung: 110,6310 ← Aus Abriss → Or. Richtung: 318,7317Anzahl PP 3
Messwerte Berechnungen
αgemessen Ydef. Höhedef.
[gon] Zenitwin. D I-S Azimut [m] [m]αkorrigiert zi,i+1 [gon] [m] [m] [gon] ∆Yprov ∆Ydef ∆Xprov ∆Xdef ∆Hprov ∆Hdef
717448,560 584,020103,6340 104,783 0,055 110,6310 103,325 103,330 -17,417 -17,431 -5,933 -5,950
N1 187,5590 717551,890 102674,219 578,070187,5396 106,3270 212,310 -0,020 98,1706 212,222 212,231 6,100 6,072 -21,190 -21,224
N2 195,1620 717764,120 102680,291 556,846195,1426 98,5830 84,661 -0,085 93,3131 84,194 84,198 8,876 8,865 1,800 1,786
N3 225,4380 717848,318 102689,156 558,632225,4186 113,6480 153,461 -0,005 118,7317 146,866 146,872 -44,505 -44,526 -33,418 -33,442
E 717995,190 102644,630 525,190
ωα = 0,058 ∑D= 555,215 wY= -0,022 wX = 0,075 wH = 0,089
#### Verbesserung =-wα/n Verbesserung = -w*D/∑D
A 102691,650
Xdef.
[m]
Standpunkt
[Nr.]
Gl. 4.8-17 Gl. 4.8-18
Tab. 4.13 Berechnung der Koordinaten mit der Methode „Beidseitig nach Koordinaten und Richtungen angeschlossener Polygon-zug“ gemäss Kap. 4.8.3
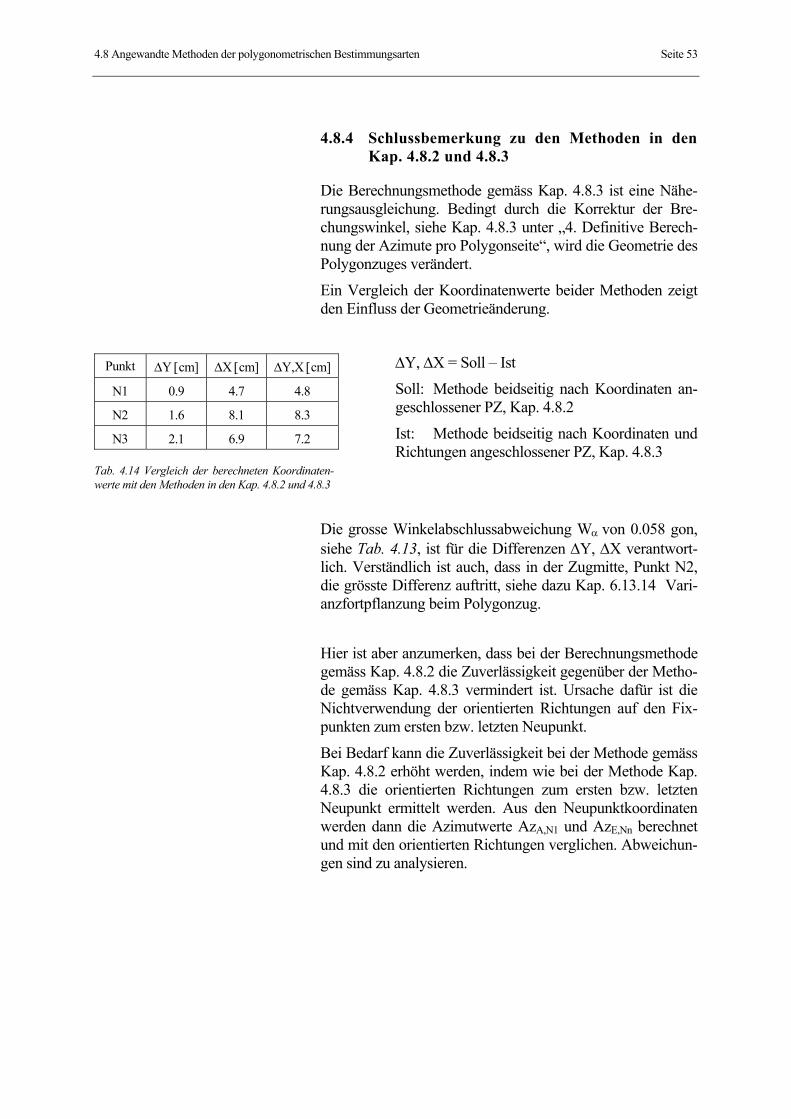
4.8 Angewandte Methoden der polygonometrischen Bestimmungsarten Seite 53
4.8.4 Schlussbemerkung zu den Methoden in den Kap. 4.8.2 und 4.8.3
Die Berechnungsmethode gemäss Kap. 4.8.3 ist eine Nähe-rungsausgleichung. Bedingt durch die Korrektur der Bre-chungswinkel, siehe Kap. 4.8.3 unter „4. Definitive Berech-nung der Azimute pro Polygonseite“, wird die Geometrie des Polygonzuges verändert.
Ein Vergleich der Koordinatenwerte beider Methoden zeigt den Einfluss der Geometrieänderung.
∆Y, ∆X = Soll – Ist
Soll: Methode beidseitig nach Koordinaten an-geschlossener PZ, Kap. 4.8.2
Ist: Methode beidseitig nach Koordinaten und Richtungen angeschlossener PZ, Kap. 4.8.3
Die grosse Winkelabschlussabweichung Wα von 0.058 gon, siehe Tab. 4.13, ist für die Differenzen ∆Y, ∆X verantwort-lich. Verständlich ist auch, dass in der Zugmitte, Punkt N2, die grösste Differenz auftritt, siehe dazu Kap. 6.13.14 Vari-anzfortpflanzung beim Polygonzug.
Hier ist aber anzumerken, dass bei der Berechnungsmethode gemäss Kap. 4.8.2 die Zuverlässigkeit gegenüber der Metho-de gemäss Kap. 4.8.3 vermindert ist. Ursache dafür ist die Nichtverwendung der orientierten Richtungen auf den Fix-punkten zum ersten bzw. letzten Neupunkt.
Bei Bedarf kann die Zuverlässigkeit bei der Methode gemäss Kap. 4.8.2 erhöht werden, indem wie bei der Methode Kap. 4.8.3 die orientierten Richtungen zum ersten bzw. letzten Neupunkt ermittelt werden. Aus den Neupunktkoordinaten werden dann die Azimutwerte AzA,N1 und AzE,Nn berechnet und mit den orientierten Richtungen verglichen. Abweichun-gen sind zu analysieren.
Punkt ∆Y [cm] ∆X [cm] ∆Y,X [cm]
N1 0.9 4.7 4.8
N2 1.6 8.1 8.3
N3 2.1 6.9 7.2
Tab. 4.14 Vergleich der berechneten Koordinaten-werte mit den Methoden in den Kap. 4.8.2 und 4.8.3
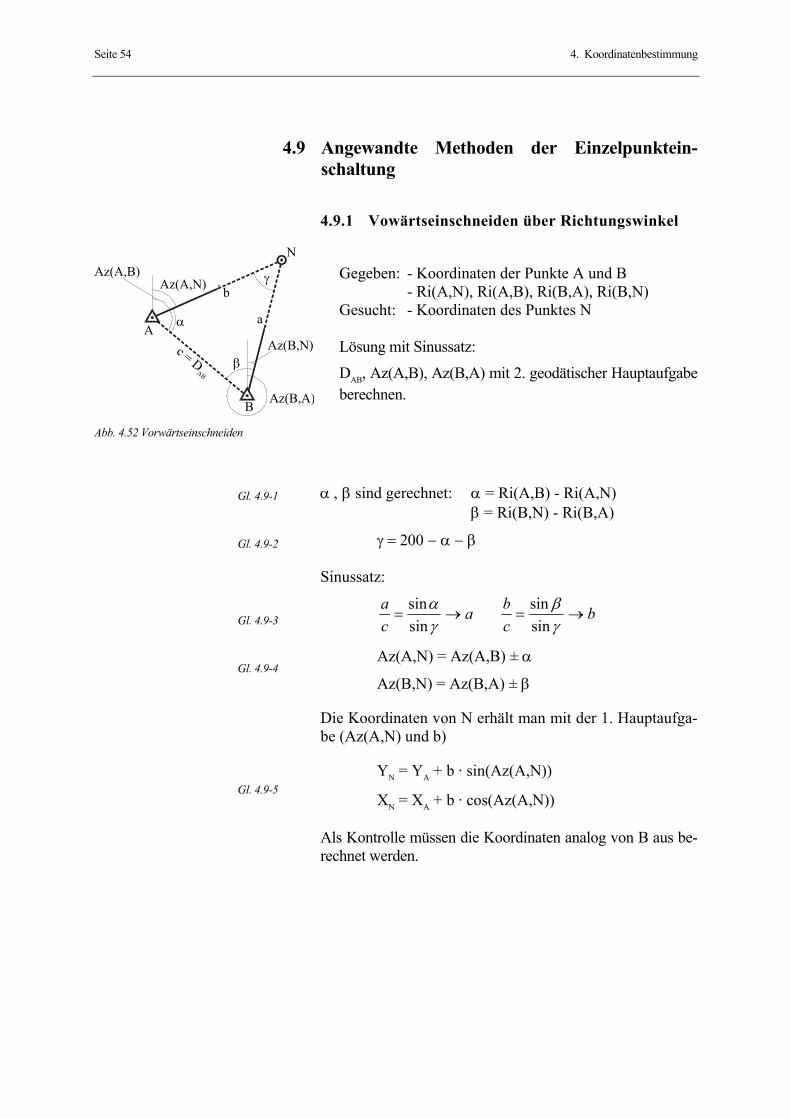
Seite 54 4. Koordinatenbestimmung
N
A
B
b
c = DAB
a
β
γ
α
Az(A,N)
Az(B,N)
Az(B,A)
Az(A,B)
4.9 Angewandte Methoden der Einzelpunktein-schaltung
4.9.1 Vowärtseinschneiden über Richtungswinkel
Gegeben: - Koordinaten der Punkte A und B - Ri(A,N), Ri(A,B), Ri(B,A), Ri(B,N) Gesucht: - Koordinaten des Punktes N Lösung mit Sinussatz:
DAB, Az(A,B), Az(B,A) mit 2. geodätischer Hauptaufgabe berechnen.
α , β sind gerechnet: α = Ri(A,B) - Ri(A,N)
β = Ri(B,N) - Ri(B,A)
γ = 200 − α − β Sinussatz:
aca
→=γα
sinsin b
cb
→=γβ
sinsin
Az(A,N) = Az(A,B) ± α
Az(B,N) = Az(B,A) ± β
Die Koordinaten von N erhält man mit der 1. Hauptaufga-be (Az(A,N) und b)
YN = YA + b · sin(Az(A,N))
XN = XA + b · cos(Az(A,N))
Als Kontrolle müssen die Koordinaten analog von B aus be-rechnet werden.
Abb. 4.52 Vorwärtseinschneiden
Gl. 4.9-1
Gl. 4.9-2
Gl. 4.9-3
Gl. 4.9-4
Gl. 4.9-5
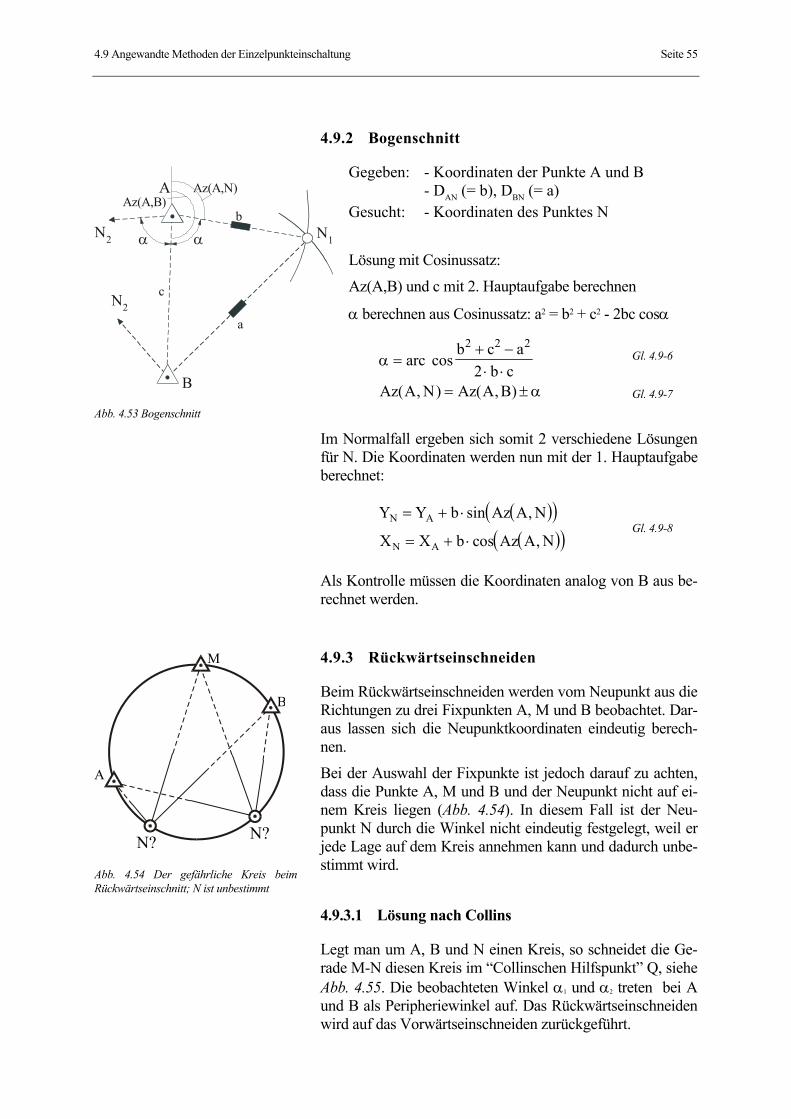
4.9 Angewandte Methoden der Einzelpunkteinschaltung Seite 55
4.9.2 Bogenschnitt
Gegeben: - Koordinaten der Punkte A und B - DAN (= b), DBN (= a) Gesucht: - Koordinaten des Punktes N
Lösung mit Cosinussatz:
Az(A,B) und c mit 2. Hauptaufgabe berechnen
α berechnen aus Cosinussatz: a2 = b2 + c2 - 2bc cosα
Im Normalfall ergeben sich somit 2 verschiedene Lösungen für N. Die Koordinaten werden nun mit der 1. Hauptaufgabe berechnet:
Als Kontrolle müssen die Koordinaten analog von B aus be-rechnet werden.
4.9.3 Rückwärtseinschneiden
Beim Rückwärtseinschneiden werden vom Neupunkt aus die Richtungen zu drei Fixpunkten A, M und B beobachtet. Dar-aus lassen sich die Neupunktkoordinaten eindeutig berech-nen.
Bei der Auswahl der Fixpunkte ist jedoch darauf zu achten, dass die Punkte A, M und B und der Neupunkt nicht auf ei-nem Kreis liegen (Abb. 4.54). In diesem Fall ist der Neu-punkt N durch die Winkel nicht eindeutig festgelegt, weil er jede Lage auf dem Kreis annehmen kann und dadurch unbe-stimmt wird.
4.9.3.1 Lösung nach Collins
Legt man um A, B und N einen Kreis, so schneidet die Ge-rade M-N diesen Kreis im “Collinschen Hilfspunkt” Q, siehe Abb. 4.55. Die beobachteten Winkel α1 und α2 treten bei A und B als Peripheriewinkel auf. Das Rückwärtseinschneiden wird auf das Vorwärtseinschneiden zurückgeführt.
α
α
=+ −
⋅ ⋅= ±
arc b c a
b cAz A N Az A B
cos
( , ) ( , )
2 2 2
2
( )( )( )( )
Y Y b Az A N
X X b Az A NN A
N A
= + ⋅
= + ⋅
sin ,
cos ,
Abb. 4.53 Bogenschnitt
Gl. 4.9-6
Gl. 4.9-7
Gl. 4.9-8
A
B
N12N
2N
b
a
c
Az(A,B)Az(A,N)
α α
A
B
M
N? N?
Abb. 4.54 Der gefährliche Kreis beimRückwärtseinschnitt; N ist unbestimmt
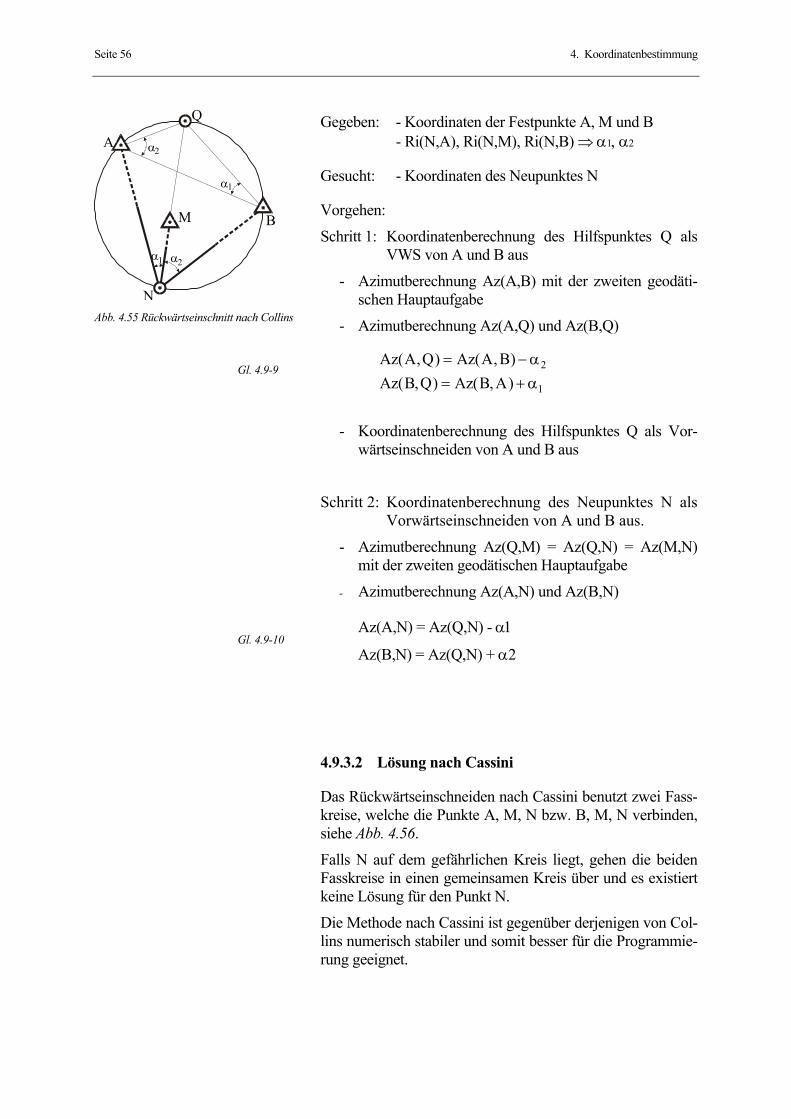
Seite 56 4. Koordinatenbestimmung
Gegeben: - Koordinaten der Festpunkte A, M und B - Ri(N,A), Ri(N,M), Ri(N,B) ⇒ α1, α2
Gesucht: - Koordinaten des Neupunktes N
Vorgehen:
Schritt 1: Koordinatenberechnung des Hilfspunktes Q als VWS von A und B aus
- Azimutberechnung Az(A,B) mit der zweiten geodäti-schen Hauptaufgabe
- Azimutberechnung Az(A,Q) und Az(B,Q)
- Koordinatenberechnung des Hilfspunktes Q als Vor-wärtseinschneiden von A und B aus
Schritt 2: Koordinatenberechnung des Neupunktes N als Vorwärtseinschneiden von A und B aus.
- Azimutberechnung Az(Q,M) = Az(Q,N) = Az(M,N) mit der zweiten geodätischen Hauptaufgabe
- Azimutberechnung Az(A,N) und Az(B,N)
Az(A,N) = Az(Q,N) - α1
Az(B,N) = Az(Q,N) + α2
4.9.3.2 Lösung nach Cassini
Das Rückwärtseinschneiden nach Cassini benutzt zwei Fass-kreise, welche die Punkte A, M, N bzw. B, M, N verbinden, siehe Abb. 4.56.
Falls N auf dem gefährlichen Kreis liegt, gehen die beiden Fasskreise in einen gemeinsamen Kreis über und es existiert keine Lösung für den Punkt N.
Die Methode nach Cassini ist gegenüber derjenigen von Col-lins numerisch stabiler und somit besser für die Programmie-rung geeignet.
A
Q
B
N
α
α
α
α
M
1
1
2
2
Az A Q Az A BAz B Q Az B A
( , ) ( , )( , ) ( , )
= −= +
αα
2
1
Abb. 4.55 Rückwärtseinschnitt nach Collins
Gl. 4.9-9
Gl. 4.9-10

4.9 Angewandte Methoden der Einzelpunkteinschaltung Seite 57
Gl. 4.9-13
Gl. 4.9-14
Schritt 1: Berechnung von R und S mit der 1. geod. HA
)ARsin(ARYY AR ⋅+=
)ARcos(ARXX AR ⋅+=
wobei: α⋅= cotAMAR (rechtwinkliges Dreieck)
2)AM()AR( π+=
AM
XX)AMcos()ARsin( AM −==
AM
YY)AMsin()ARcos( AM −−=−=
daraus:
für S analog:
Schritt 2: Schnitt von RS mit MN wobei RSMN⊥
Steigung von RS : tXXYY
XXYY
)RStan(RN
RN
RS
RS =−−
=−−
=
Steigung von MN : cXXYY
)MNtan(MN
MN −=−−
=
es gilt 1ct =⋅ (Steigungen zweier ⊥ Geraden)
Schritt 3: Lösen des Gleichungssystems nach den Unbe-kannten YN und XN führt auf
( )( )
Y Y X X
X X Y YR A M A
R A M A
= + − ⋅
= − − ⋅
cot
cot
α
α
1
1
( )( )
Y Y X X
X X Y YS B M B
S B M B
= − − ⋅
= + − ⋅
cot
cot
α
α
2
2
Yc Y t Y X X
t c
Xt X c X Y Y
t c
NR M M R
NR M M R
=⋅ + ⋅ + −
+
=⋅ + ⋅ + −
+
Abb. 4.56 Rückwärtseinschneiden nach der Methode von Cassini(α1, α2: Aus Richtungsmessungen berechnete Winkel)
Gl. 4.9-11
Gl. 4.9-12
Gl. 4.9-15
N R
A
MB
S
α2
α1
+X
+Y
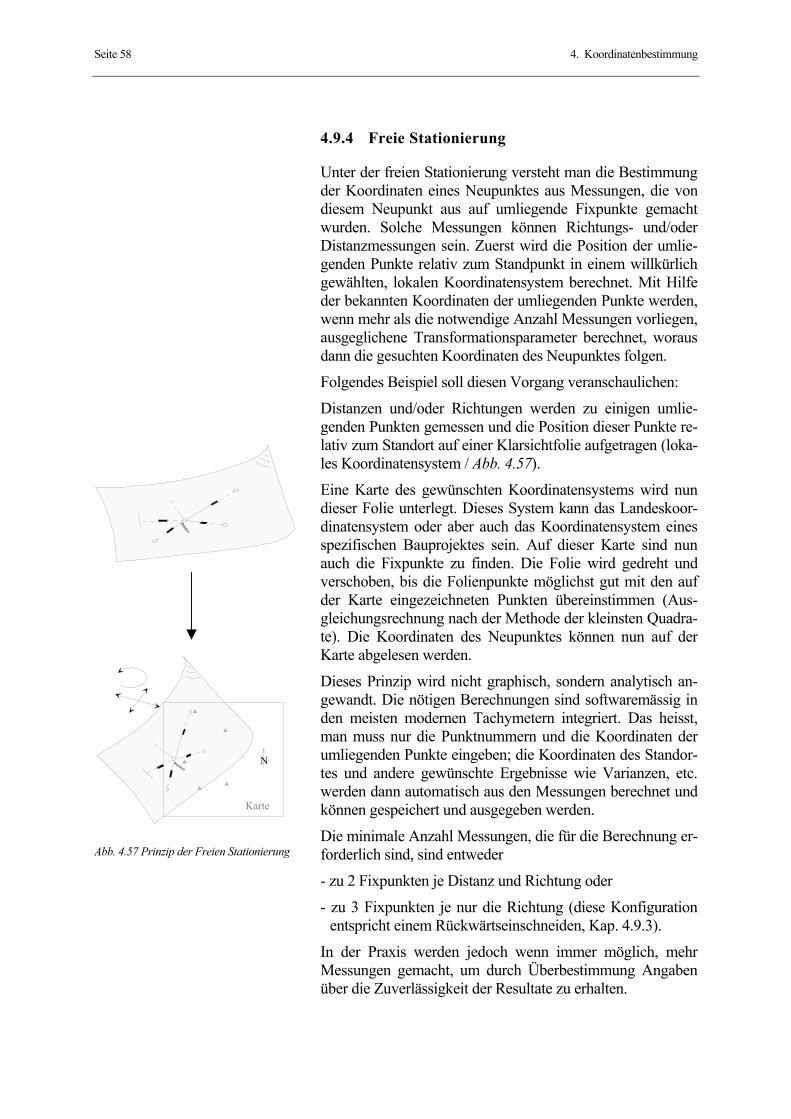
Seite 58 4. Koordinatenbestimmung
4.9.4 Freie Stationierung
Unter der freien Stationierung versteht man die Bestimmung der Koordinaten eines Neupunktes aus Messungen, die von diesem Neupunkt aus auf umliegende Fixpunkte gemacht wurden. Solche Messungen können Richtungs- und/oder Distanzmessungen sein. Zuerst wird die Position der umlie-genden Punkte relativ zum Standpunkt in einem willkürlich gewählten, lokalen Koordinatensystem berechnet. Mit Hilfe der bekannten Koordinaten der umliegenden Punkte werden, wenn mehr als die notwendige Anzahl Messungen vorliegen, ausgeglichene Transformationsparameter berechnet, woraus dann die gesuchten Koordinaten des Neupunktes folgen.
Folgendes Beispiel soll diesen Vorgang veranschaulichen:
Distanzen und/oder Richtungen werden zu einigen umlie-genden Punkten gemessen und die Position dieser Punkte re-lativ zum Standort auf einer Klarsichtfolie aufgetragen (loka-les Koordinatensystem / Abb. 4.57).
Eine Karte des gewünschten Koordinatensystems wird nun dieser Folie unterlegt. Dieses System kann das Landeskoor-dinatensystem oder aber auch das Koordinatensystem eines spezifischen Bauprojektes sein. Auf dieser Karte sind nun auch die Fixpunkte zu finden. Die Folie wird gedreht und verschoben, bis die Folienpunkte möglichst gut mit den auf der Karte eingezeichneten Punkten übereinstimmen (Aus-gleichungsrechnung nach der Methode der kleinsten Quadra-te). Die Koordinaten des Neupunktes können nun auf der Karte abgelesen werden.
Dieses Prinzip wird nicht graphisch, sondern analytisch an-gewandt. Die nötigen Berechnungen sind softwaremässig in den meisten modernen Tachymetern integriert. Das heisst, man muss nur die Punktnummern und die Koordinaten der umliegenden Punkte eingeben; die Koordinaten des Standor-tes und andere gewünschte Ergebnisse wie Varianzen, etc. werden dann automatisch aus den Messungen berechnet und können gespeichert und ausgegeben werden.
Die minimale Anzahl Messungen, die für die Berechnung er-forderlich sind, sind entweder
- zu 2 Fixpunkten je Distanz und Richtung oder
- zu 3 Fixpunkten je nur die Richtung (diese Konfiguration entspricht einem Rückwärtseinschneiden, Kap. 4.9.3).
In der Praxis werden jedoch wenn immer möglich, mehr Messungen gemacht, um durch Überbestimmung Angaben über die Zuverlässigkeit der Resultate zu erhalten.
Karte
N
Abb. 4.57 Prinzip der Freien Stationierung
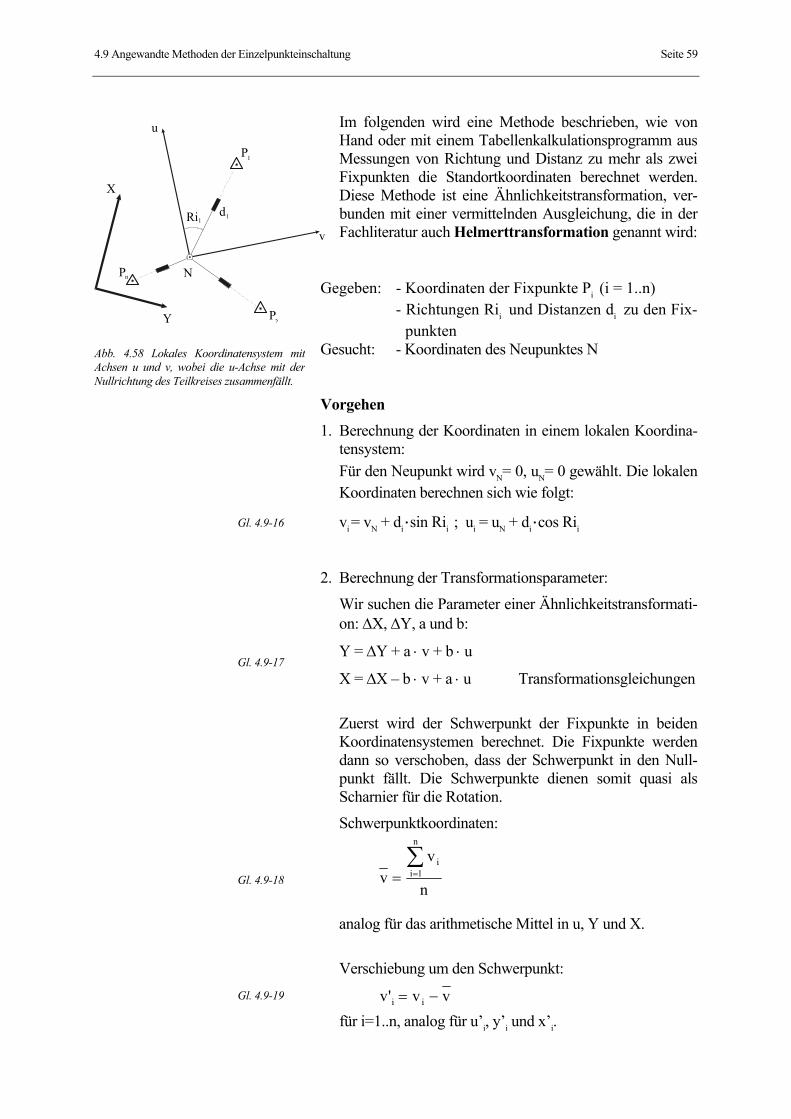
4.9 Angewandte Methoden der Einzelpunkteinschaltung Seite 59
X
Y
u
v
N
Ri1d1
P1
P2
Pn
Im folgenden wird eine Methode beschrieben, wie von Hand oder mit einem Tabellenkalkulationsprogramm aus Messungen von Richtung und Distanz zu mehr als zwei Fixpunkten die Standortkoordinaten berechnet werden. Diese Methode ist eine Ähnlichkeitstransformation, ver-bunden mit einer vermittelnden Ausgleichung, die in der Fachliteratur auch Helmerttransformation genannt wird:
Gegeben: - Koordinaten der Fixpunkte Pi (i = 1..n) - Richtungen Rii und Distanzen di zu den Fix-
punkten Gesucht: - Koordinaten des Neupunktes N Vorgehen 1. Berechnung der Koordinaten in einem lokalen Koordina-
tensystem: Für den Neupunkt wird vN= 0, uN= 0 gewählt. Die lokalen Koordinaten berechnen sich wie folgt:
vi = vN + di·sin Rii ; ui = uN + di·cos Rii
2. Berechnung der Transformationsparameter:
Wir suchen die Parameter einer Ähnlichkeitstransformati-on: ∆X, ∆Y, a und b:
Y = ∆Y + a ⋅ v + b ⋅ u
X = ∆X – b ⋅ v + a ⋅ u Transformationsgleichungen
Zuerst wird der Schwerpunkt der Fixpunkte in beiden Koordinatensystemen berechnet. Die Fixpunkte werden dann so verschoben, dass der Schwerpunkt in den Null-punkt fällt. Die Schwerpunkte dienen somit quasi als Scharnier für die Rotation.
Schwerpunktkoordinaten:
analog für das arithmetische Mittel in u, Y und X.
Verschiebung um den Schwerpunkt:
für i=1..n, analog für u’i, y’i und x’i.
vv
n
ii
n
= =∑
1
v v vi i' = −
Gl. 4.9-16
Abb. 4.58 Lokales Koordinatensystem mitAchsen u und v, wobei die u-Achse mit derNullrichtung des Teilkreises zusammenfällt.
Gl. 4.9-17
Gl. 4.9-18
Gl. 4.9-19
Seite 60 4. Koordinatenbestimmung
Transformationsparameter: 3. Berechnung der Standortkoordinaten:
Da vN und uN gleich null gewählt wurden, ergibt sich für die gesuchten transformierten Koordinaten:
yN = ∆y und xN = ∆x
Numerisches Beispiel Gegeben: YA = 680934.210 XA = 251310.625 YB = 680876.893 XB = 250672.722 YC = 680575.760 XC = 251344.454
Gemessen: Distanzen und Richtungen von N aus zu A, B, C
DNA = 247.592 m Ri(NA) = 24.8748 gon DNB = 610.955 m Ri(NB) = 119.7481 gon DNC = 147.206 m Ri(NC) = 280.6322 gon
Gesucht: YN , XN (Koordinaten der freien Station)
Schritt 1: Lokale Koordinaten berechnen
aus Distanz und Richtung Koordinaten der Punkte A, B, C in einem lokalen Koordinatensystem (Freie Station liegt im Koordinatenursprung, x-Achse ist die Nullrichtung des Teil-kreises):
vA = 247.592·sin(24.8748) uA = 247.592·cos(24.8748) vA = 94.299 uA = 228.931 vB = 581.795 uB = - 186.495 vC = -140.446 uC = - 44.097
( )av y u x
v u
i ii
i ii
i ii
=⋅ + ⋅
+
∑ ∑∑
' ' ' '
' '2 2
( )bu y v x
v u
i i i iii
i ii
=⋅ − ⋅
+
∑∑
∑
' ' ' '
' '2 2
∆y y a v b u= − ⋅ − ⋅
∆x x b v a u= + ⋅ − ⋅
Gl. 4.9-20
Gl. 4.9-21
Gl. 4.9-22
4.9 Angewandte Methoden der Einzelpunkteinschaltung Seite 61
Schritt 2: Transformationsparameter berechnen
Schwerpunkte der Landeskoordinaten und der lokalen Koor-dinaten:
Schwerpunktkoordinaten:
y‘A = 138.589 x‘A = 201.358 y‘B = 81.272 x‘B = -436.545 y‘C = -219.861 x‘C = 235.187
v‘A = - 84.250 u‘A = 229.485 v‘B = 403.246 u‘B = -185.941 v‘C = -318.995 u‘C = - 43.543
Σ(v’iy’i) = 91231.1 Σ(u’ix’i ) = 117139.5 Σ(v’ix’i) = -268022.9 Σ(v’i
2 +u’i2) = 360596.6
Σ(u’iy’i) = 26265.7
a = 0.577850 b = 0.816116
Schritt 3: Standpunktkoordinaten berechnen
YN = ubvay ⋅−⋅− = 680795.621 - 0.577850 · 178.549 - 0.816116 · (-0.554) = 680692.899 m
XN = uavbx ⋅−⋅+ = 251109.267 + 0.816116 · 178.549 - 0.577850 · (-0.554) = 251255.304 m
y = 680795 621. x = 251109 267.
v = 178 549. u = −0 554.

Inhaltsverzeichnis Seite I
5. Höhenbestimmung
5.1 Methoden der Höhenbestimmung...................................................................................................1
5.2 Höhensysteme.....................................................................................................................................2 5.2.1 Vorbemerkungen ..........................................................................................................................2 5.2.2 Anforderungen an die Definition von Höhen ..............................................................................3 5.2.3 Orthometrische Höhen..................................................................................................................4 5.2.4 Normalhöhen ................................................................................................................................4 5.2.5 Ellipsoidische Höhen....................................................................................................................5
5.3 Höhennetze in der Schweiz...............................................................................................................6 5.3.1 Das Höhendatum der Schweiz .....................................................................................................6 5.3.2 Das Landesnivellement.................................................................................................................6 5.3.3 Kantonale und kommunale Nivellemente....................................................................................7
5.4 Geometrisches Nivellement mit Nivellierinstrument ....................................................................8 5.4.1 Prinzip ...........................................................................................................................................8 5.4.2 Nivellierverfahren.......................................................................................................................10 5.4.3 Liniennivellement .......................................................................................................................10
5.4.3.1 Eingehängter Nivellementszug.............................................................................................10 5.4.3.2 Freier Nivellementszug .........................................................................................................10 5.4.3.3 Nivellementsschleife .............................................................................................................11 5.4.3.4 Nivellementsknoten (Netzverdichtung)................................................................................11
5.4.4 Numerisches Beispiel für ein Liniennivellement mit beidseitigem Höhenanschluss...............12 5.4.5 Flächennivellement.....................................................................................................................14
5.4.5.1 Aufnahme diskreter Punkte...................................................................................................14 5.4.5.2 Aufnahme von Punkten in einem festgelegten Raster .........................................................15 5.4.5.3 Arbeiten mit dem Instrumentenhorizont...............................................................................16 5.4.5.4 Arbeiten mit Höhendifferenzen ............................................................................................17
5.4.6 Liniennivellement mit Zwischenblicken....................................................................................18
5.5 Trigonometrische Höhenbestimmung ......................................................................................... 19 5.5.1 Prinzip .........................................................................................................................................19 5.5.2 Einfluss der Erdkrümmung ........................................................................................................20 5.5.3 Einfluss der Refraktion ...............................................................................................................21 5.5.4 Gegenseitig-gleichzeitige Zenitwinkelbeobachtung..................................................................23 5.5.5 Trigonometrisches Nivellement .................................................................................................24
5.6 Motorisierte Verfahren.................................................................................................................. 26
5.7 Barometrische Höhenmessung ..................................................................................................... 27 5.7.1 Prinzip .........................................................................................................................................27 5.7.2 Instrumente und Genauigkeiten..................................................................................................28
5.8 Hydrostatisches Nivellement ......................................................................................................... 29 5.8.1 Prinzip .........................................................................................................................................29 5.8.2 Einfaches hydrostatisches Nivellement......................................................................................30 5.8.3 Präzisionsschlauchwaage............................................................................................................30
Seite II Inhaltsverzeichnis
5.9 Höhenbestimmung mit GPS.......................................................................................................... 31
5.10 Weitere Höhenbestimmungsmethoden ...................................................................................... 33 5.10.1 Hydrodynamisches Nivellement ................................................................................................33 5.10.2 VLBI (Very Long Baseline Interferometry) ..............................................................................33 5.10.3 SLR/LLR.....................................................................................................................................34 5.10.4 Satellitenaltimetrie ......................................................................................................................34
Zusammenstellung der wichtigsten Formelzeichen Seite III
Zusammenstellung der wichtigsten Formelzeichen
β von der Abplattung der Erde abhängiger Schwerekoeffizient ∆h Höhenunterschied ∆H Gesamthöhenunterschied (Σ∆h) einer Nivellementsstrecke δ Verhältnis der Dichte des Wasserdampfes zur Dichte der trockenen Luft bei
0°C und 1013.25 hPa (Luftdruck auf Meereshöhe) δΗ Abstand der Höhennullfläche vom Bezugsellipsoid δE Einfluss der Erdkrümmung auf den Zenitwinkel
δR Refraktionswinkel
η Lotabweichung ρ 200/π ρ0 Dichte der trockenen Luft unter Berücksichtigung des Kohlensäuregehaltes
bei 0°C und 1013.25 hPa (Luftdruck auf Meereshöhe) ϕ geographische Breite κ Refraktionskoeffizient τ Laufzeitunterschied ai Ablesungen an einer Schlauchwaage Bi Barometerablesungen b Basislänge c Lichtgeschwindigkeit D Länge des Nivellementsabschnittes ds unkorrigierte Schrägdistanz (Rohdistanz) dhor meteokorrigierte Horizontaldistanz dm meteokorrigierte Schrägdistanz e Wasserdampfdruck g Betrag der Schwerebeschleunigung (Schwere) g0
45 Schwerebeschleunigung in Meereshöhe unter geographischer Breite ϕ=45°
H Abstand zwischen mittlerer aktueller Meeresoberfläche und Geoid orthometrische Höhe eines Punktes A, Länge der Lotlinie zwischen A und
dem Geoid HN Normalhöhe h ellipsoidische Höhe I Instrumentenhöhe kE Korrektion aufgrund des Einflusses der Erdkrümmung kR Korrektion aufgrund des Einflusses der Refraktion N Geoidundulation po Luftdruck in Meereshöhe R Rückblickablesung (lotrechter Abstand an der Nivellierlatte), Kap. 5.4 R Erdradius (ca. 6378 km)
H 0A
Seite IV Zusammenstellung der wichtigsten Formelzeichen
RLicht Lichtbogenradius S Zieltafel- bzw. Reflektorhöhe sx Standardabweichung der Gewichtseinheit s0 Standardabweichung am arithmetischen Mittel s[H] Standardabweichung der gesamten Höhendifferenz T Temperatur in Kelvin Ui Lattenumstellpunkte V Vorblickablesung (lotrechter Abstand an der Nivellierlatte) vi Verbesserung W Schwerepotential w Widerspruch zwischen dem gemessenen Höhenunterschied und dem gerechne-
ten aus Soll-Höhen z Zenitwinkel Zi Zwischenblick
Die Formelzeichen besitzen ihre Gültigkeit, falls nichts anderes in Text oder Abbildung bemerkt ist.
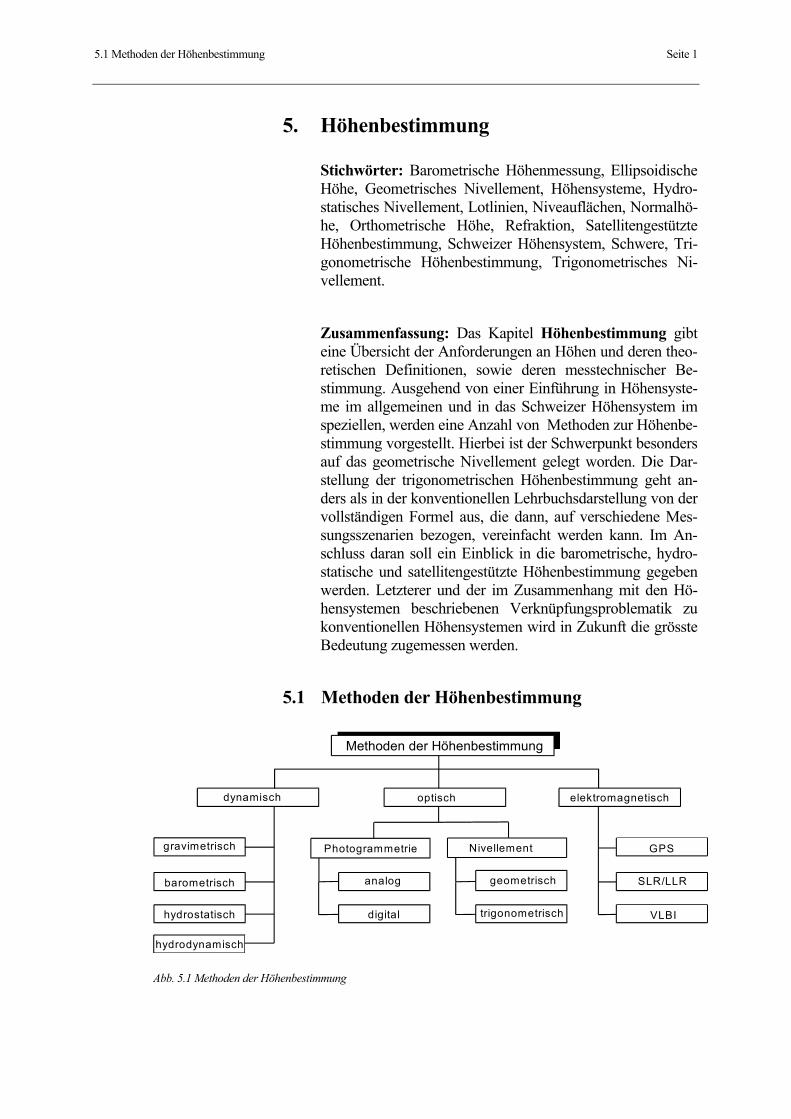
5.1 Methoden der Höhenbestimmung Seite 1
5. Höhenbestimmung
Stichwörter: Barometrische Höhenmessung, Ellipsoidische Höhe, Geometrisches Nivellement, Höhensysteme, Hydro-statisches Nivellement, Lotlinien, Niveauflächen, Normalhö-he, Orthometrische Höhe, Refraktion, Satellitengestützte Höhenbestimmung, Schweizer Höhensystem, Schwere, Tri-gonometrische Höhenbestimmung, Trigonometrisches Ni-vellement.
Zusammenfassung: Das Kapitel Höhenbestimmung gibt eine Übersicht der Anforderungen an Höhen und deren theo-retischen Definitionen, sowie deren messtechnischer Be-stimmung. Ausgehend von einer Einführung in Höhensyste-me im allgemeinen und in das Schweizer Höhensystem im speziellen, werden eine Anzahl von Methoden zur Höhenbe-stimmung vorgestellt. Hierbei ist der Schwerpunkt besonders auf das geometrische Nivellement gelegt worden. Die Dar-stellung der trigonometrischen Höhenbestimmung geht an-ders als in der konventionellen Lehrbuchsdarstellung von der vollständigen Formel aus, die dann, auf verschiedene Mes-sungsszenarien bezogen, vereinfacht werden kann. Im An-schluss daran soll ein Einblick in die barometrische, hydro-statische und satellitengestützte Höhenbestimmung gegeben werden. Letzterer und der im Zusammenhang mit den Hö-hensystemen beschriebenen Verknüpfungsproblematik zu konventionellen Höhensystemen wird in Zukunft die grösste Bedeutung zugemessen werden.
5.1 Methoden der Höhenbestimmung
dynamisch optisch elektromagnetisch
gravimetrisch
barometrisch
hydrostatisch
hydrodynamisch
Photogrammetrie Nivellement
analog
digital
geometrisch
trigonometrisch
GPS
SLR/LLR
VLBI
Methoden der H henbestimmungö
Abb. 5.1 Methoden der Höhenbestimmung
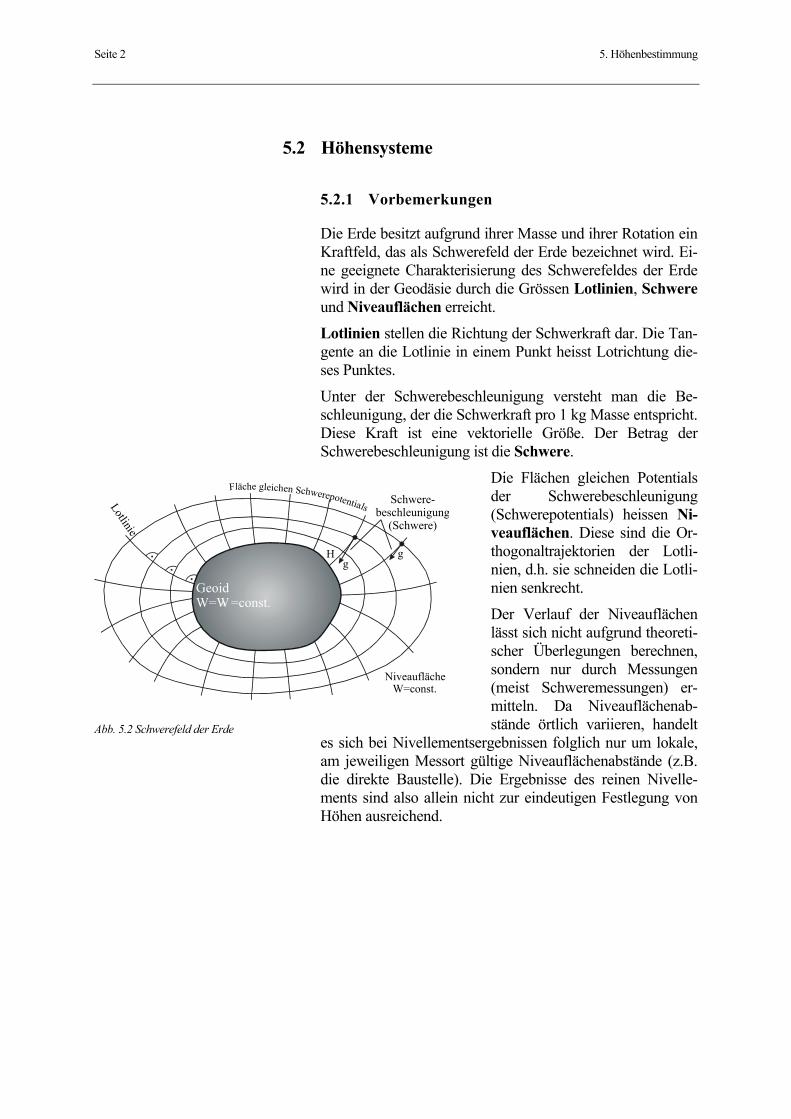
Seite 2 5. Höhenbestimmung
5.2 Höhensysteme
5.2.1 Vorbemerkungen
Die Erde besitzt aufgrund ihrer Masse und ihrer Rotation ein Kraftfeld, das als Schwerefeld der Erde bezeichnet wird. Ei-ne geeignete Charakterisierung des Schwerefeldes der Erde wird in der Geodäsie durch die Grössen Lotlinien, Schwere und Niveauflächen erreicht.
Lotlinien stellen die Richtung der Schwerkraft dar. Die Tan-gente an die Lotlinie in einem Punkt heisst Lotrichtung die-ses Punktes.
Unter der Schwerebeschleunigung versteht man die Be-schleunigung, der die Schwerkraft pro 1 kg Masse entspricht. Diese Kraft ist eine vektorielle Größe. Der Betrag der Schwerebeschleunigung ist die Schwere.
Die Flächen gleichen Potentials der Schwerebeschleunigung (Schwerepotentials) heissen Ni-veauflächen. Diese sind die Or-thogonaltrajektorien der Lotli-nien, d.h. sie schneiden die Lotli-nien senkrecht.
Der Verlauf der Niveauflächen lässt sich nicht aufgrund theoreti-scher Überlegungen berechnen, sondern nur durch Messungen (meist Schweremessungen) er-mitteln. Da Niveauflächenab-stände örtlich variieren, handelt
es sich bei Nivellementsergebnissen folglich nur um lokale, am jeweiligen Messort gültige Niveauflächenabstände (z.B. die direkte Baustelle). Die Ergebnisse des reinen Nivelle-ments sind also allein nicht zur eindeutigen Festlegung von Höhen ausreichend.
GeoidW=W0 =const.
NiveauflächeW=const.
Hg
g
Lotlinie
Schwere-beschleunigung
(Schwere)
Fläche gleichen Schwerepotentials
Abb. 5.2 Schwerefeld der Erde
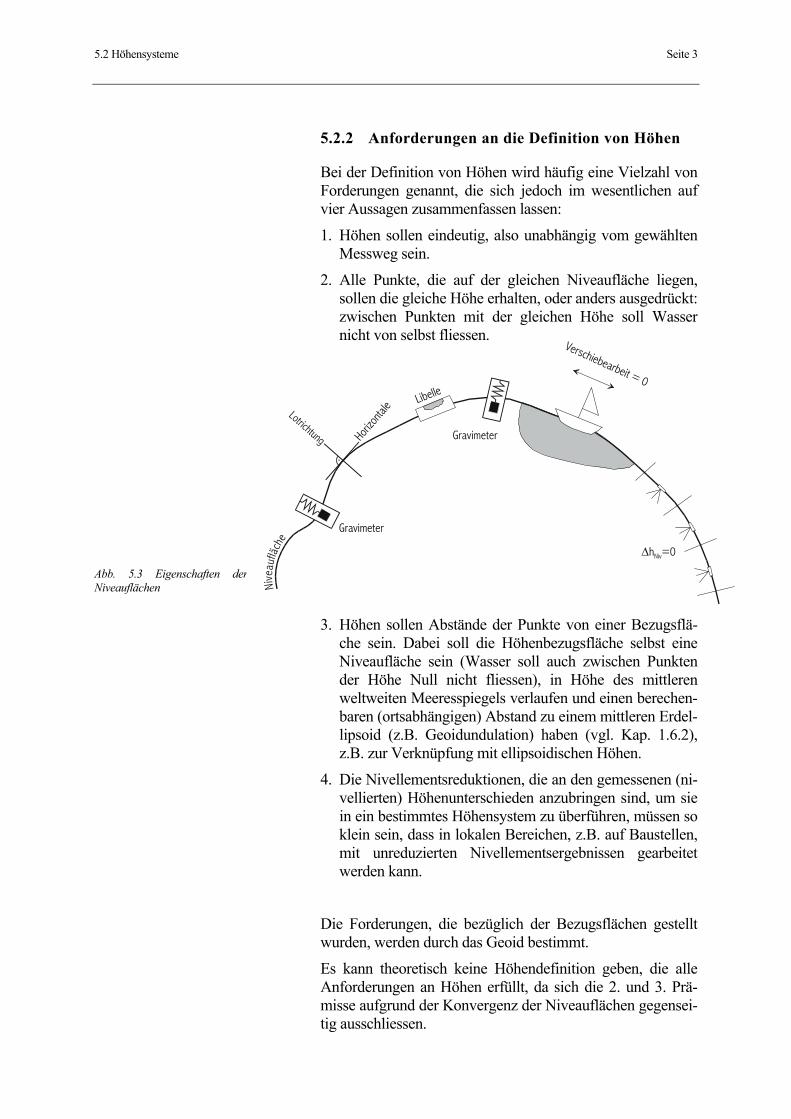
5.2 Höhensysteme Seite 3
5.2.2 Anforderungen an die Definition von Höhen
Bei der Definition von Höhen wird häufig eine Vielzahl von Forderungen genannt, die sich jedoch im wesentlichen auf vier Aussagen zusammenfassen lassen:
1. Höhen sollen eindeutig, also unabhängig vom gewählten Messweg sein.
2. Alle Punkte, die auf der gleichen Niveaufläche liegen, sollen die gleiche Höhe erhalten, oder anders ausgedrückt: zwischen Punkten mit der gleichen Höhe soll Wasser nicht von selbst fliessen.
3. Höhen sollen Abstände der Punkte von einer Bezugsflä-che sein. Dabei soll die Höhenbezugsfläche selbst eine Niveaufläche sein (Wasser soll auch zwischen Punkten der Höhe Null nicht fliessen), in Höhe des mittleren weltweiten Meeresspiegels verlaufen und einen berechen-baren (ortsabhängigen) Abstand zu einem mittleren Erdel-lipsoid (z.B. Geoidundulation) haben (vgl. Kap. 1.6.2), z.B. zur Verknüpfung mit ellipsoidischen Höhen.
4. Die Nivellementsreduktionen, die an den gemessenen (ni-vellierten) Höhenunterschieden anzubringen sind, um sie in ein bestimmtes Höhensystem zu überführen, müssen so klein sein, dass in lokalen Bereichen, z.B. auf Baustellen, mit unreduzierten Nivellementsergebnissen gearbeitet werden kann.
Die Forderungen, die bezüglich der Bezugsflächen gestellt wurden, werden durch das Geoid bestimmt.
Es kann theoretisch keine Höhendefinition geben, die alle Anforderungen an Höhen erfüllt, da sich die 2. und 3. Prä-misse aufgrund der Konvergenz der Niveauflächen gegensei-tig ausschliessen.
Abb. 5.3 Eigenschaften derNiveauflächen
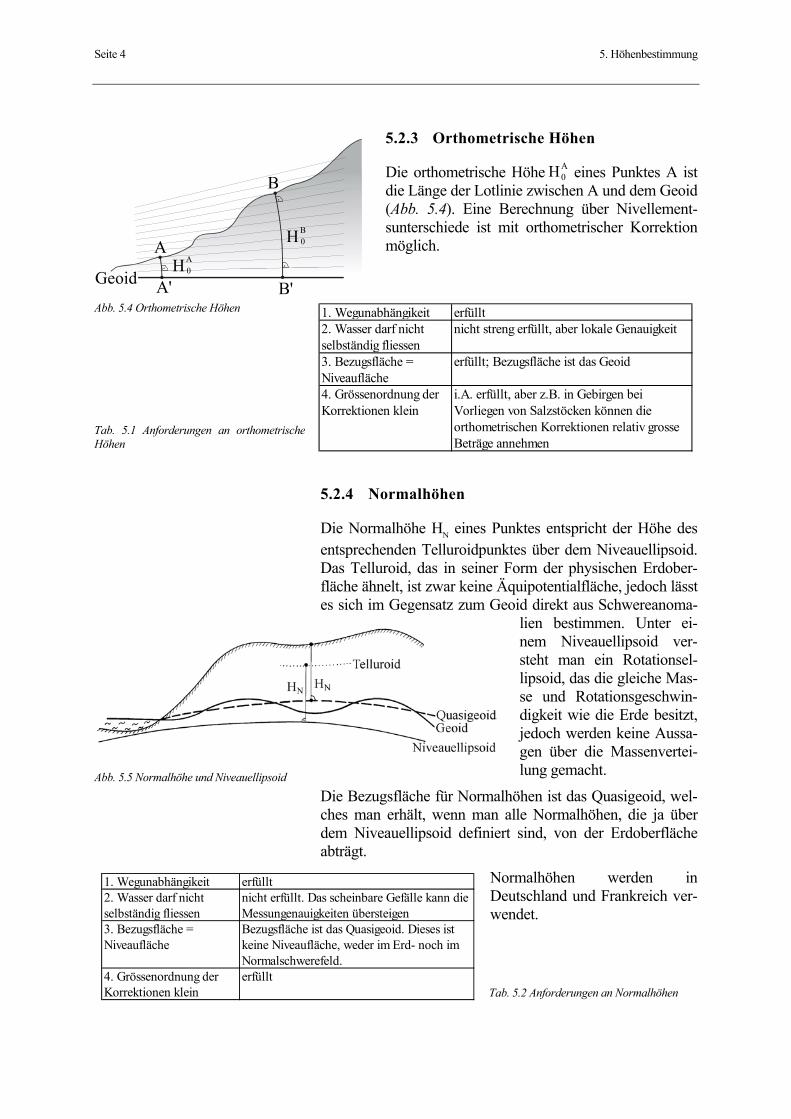
Seite 4 5. Höhenbestimmung
5.2.3 Orthometrische Höhen
Die orthometrische Höhe eines Punktes A ist die Länge der Lotlinie zwischen A und dem Geoid (Abb. 5.4). Eine Berechnung über Nivellement-sunterschiede ist mit orthometrischer Korrektion möglich.
5.2.4 Normalhöhen
Die Normalhöhe HN eines Punktes entspricht der Höhe des entsprechenden Telluroidpunktes über dem Niveauellipsoid. Das Telluroid, das in seiner Form der physischen Erdober-fläche ähnelt, ist zwar keine Äquipotentialfläche, jedoch lässt es sich im Gegensatz zum Geoid direkt aus Schwereanoma-
lien bestimmen. Unter ei-nem Niveauellipsoid ver-steht man ein Rotationsel-lipsoid, das die gleiche Mas-se und Rotationsgeschwin-digkeit wie die Erde besitzt, jedoch werden keine Aussa-gen über die Massenvertei-lung gemacht.
Die Bezugsfläche für Normalhöhen ist das Quasigeoid, wel-ches man erhält, wenn man alle Normalhöhen, die ja über dem Niveauellipsoid definiert sind, von der Erdoberfläche abträgt.
Normalhöhen werden in Deutschland und Frankreich ver-wendet.
Tab. 5.1 Anforderungen an orthometrischeHöhen
Abb. 5.5 Normalhöhe und Niveauellipsoid
Tab. 5.2 Anforderungen an Normalhöhen
HA0
Geoid A' B'
AA
B
B
0
0
H
H
Abb. 5.4 Orthometrische Höhen 1. Wegunabhängikeit erfüllt2. Wasser darf nicht selbständig fliessen
nicht streng erfüllt, aber lokale Genauigkeit
3. Bezugsfläche = Niveaufläche
erfüllt; Bezugsfläche ist das Geoid
4. Grössenordnung der Korrektionen klein
i.A. erfüllt, aber z.B. in Gebirgen bei Vorliegen von Salzstöcken können die orthometrischen Korrektionen relativ grosse Beträge annehmen
1. Wegunabhängikeit erfüllt2. Wasser darf nicht selbständig fliessen
nicht erfüllt. Das scheinbare Gefälle kann die Messungenauigkeiten übersteigen
3. Bezugsfläche = Niveaufläche
Bezugsfläche ist das Quasigeoid. Dieses ist keine Niveaufläche, weder im Erd- noch im Normalschwerefeld.
4. Grössenordnung der Korrektionen klein
erfüllt
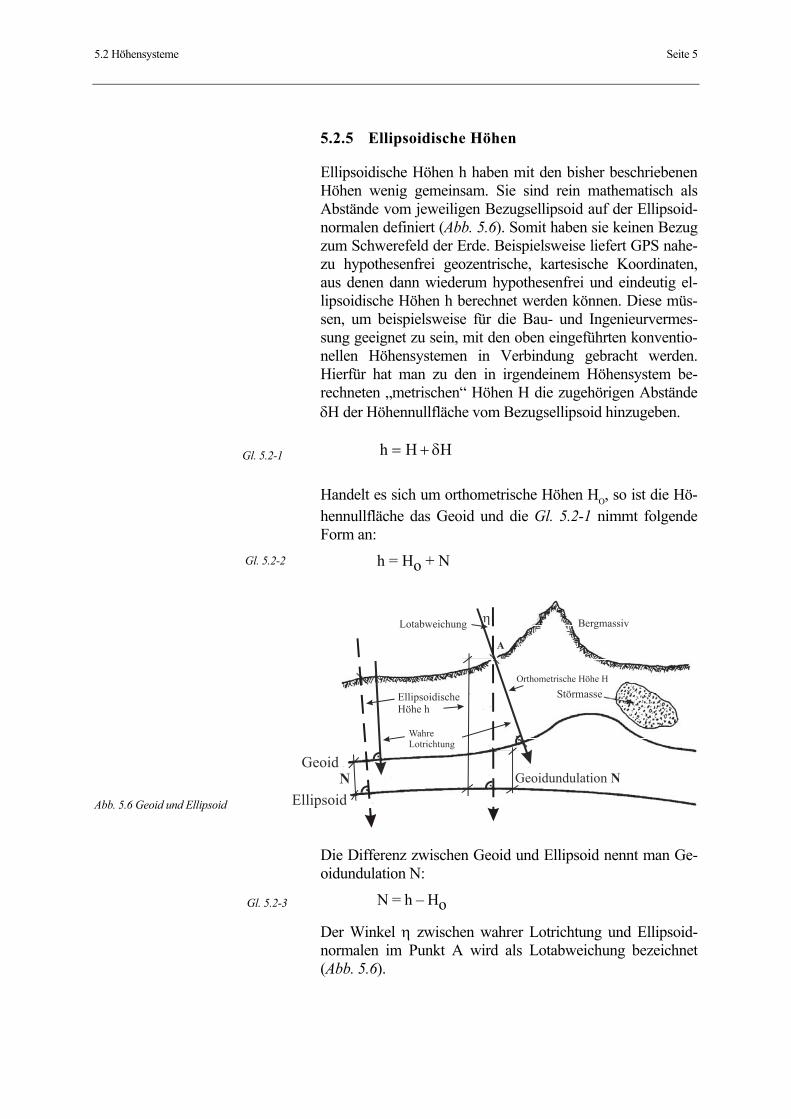
5.2 Höhensysteme Seite 5
Gl. 5.2-1
5.2.5 Ellipsoidische Höhen
Ellipsoidische Höhen h haben mit den bisher beschriebenen Höhen wenig gemeinsam. Sie sind rein mathematisch als Abstände vom jeweiligen Bezugsellipsoid auf der Ellipsoid-normalen definiert (Abb. 5.6). Somit haben sie keinen Bezug zum Schwerefeld der Erde. Beispielsweise liefert GPS nahe-zu hypothesenfrei geozentrische, kartesische Koordinaten, aus denen dann wiederum hypothesenfrei und eindeutig el-lipsoidische Höhen h berechnet werden können. Diese müs-sen, um beispielsweise für die Bau- und Ingenieurvermes-sung geeignet zu sein, mit den oben eingeführten konventio-nellen Höhensystemen in Verbindung gebracht werden. Hierfür hat man zu den in irgendeinem Höhensystem be-rechneten „metrischen“ Höhen H die zugehörigen Abstände δΗ der Höhennullfläche vom Bezugsellipsoid hinzugeben.
Handelt es sich um orthometrische Höhen HO, so ist die Hö-hennullfläche das Geoid und die Gl. 5.2-1 nimmt folgende Form an:
h = Ho + N
Die Differenz zwischen Geoid und Ellipsoid nennt man Ge-oidundulation N:
N = h – Ho
Der Winkel η zwischen wahrer Lotrichtung und Ellipsoid-normalen im Punkt A wird als Lotabweichung bezeichnet (Abb. 5.6).
Abb. 5.6 Geoid und Ellipsoid
Gl. 5.2-2
h H H= + δ
Gl. 5.2-3
Geoidundulation NGeoid
Ellipsoid
Lotabweichung Bergmassiv
StörmasseOrthometrische Höhe H
Ellipsoidische Höhe h
WahreLotrichtung
N
A
Geoid
η
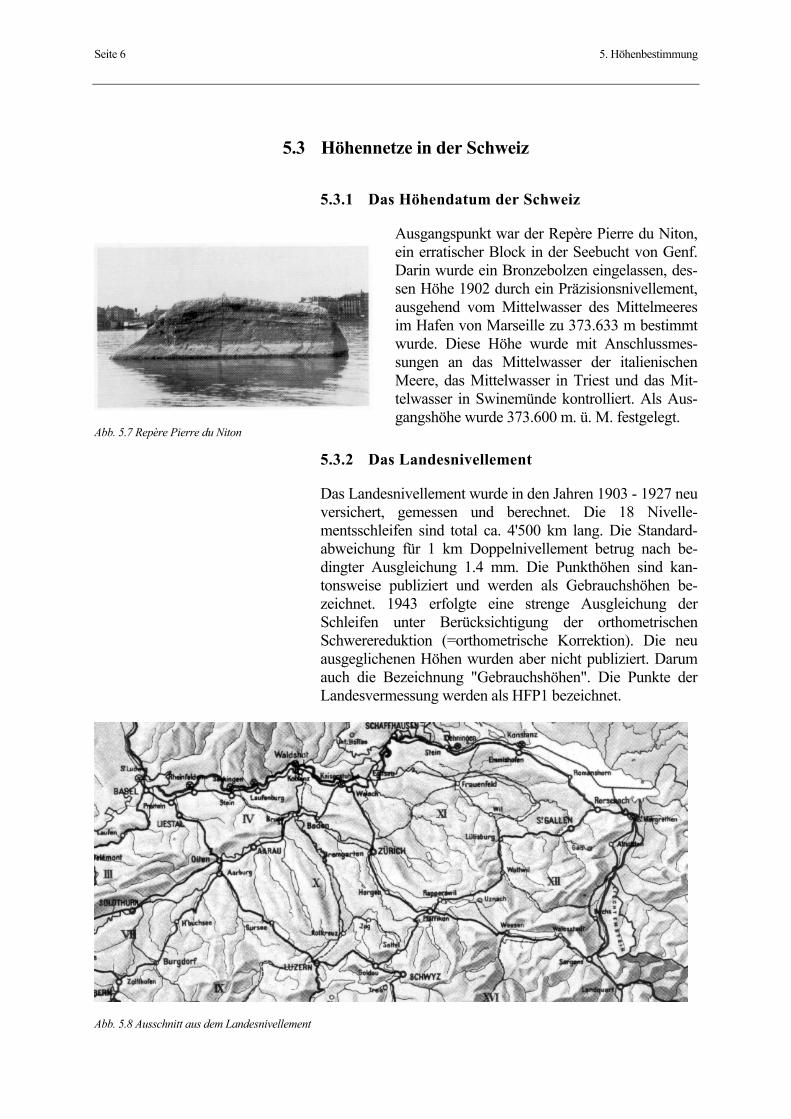
Seite 6 5. Höhenbestimmung
5.3 Höhennetze in der Schweiz
5.3.1 Das Höhendatum der Schweiz
Ausgangspunkt war der Repère Pierre du Niton, ein erratischer Block in der Seebucht von Genf. Darin wurde ein Bronzebolzen eingelassen, des-sen Höhe 1902 durch ein Präzisionsnivellement, ausgehend vom Mittelwasser des Mittelmeeres im Hafen von Marseille zu 373.633 m bestimmt wurde. Diese Höhe wurde mit Anschlussmes-sungen an das Mittelwasser der italienischen Meere, das Mittelwasser in Triest und das Mit-telwasser in Swinemünde kontrolliert. Als Aus-gangshöhe wurde 373.600 m. ü. M. festgelegt.
5.3.2 Das Landesnivellement
Das Landesnivellement wurde in den Jahren 1903 - 1927 neu versichert, gemessen und berechnet. Die 18 Nivelle-mentsschleifen sind total ca. 4'500 km lang. Die Standard-abweichung für 1 km Doppelnivellement betrug nach be-dingter Ausgleichung 1.4 mm. Die Punkthöhen sind kan-tonsweise publiziert und werden als Gebrauchshöhen be-zeichnet. 1943 erfolgte eine strenge Ausgleichung der Schleifen unter Berücksichtigung der orthometrischen Schwerereduktion (=orthometrische Korrektion). Die neu ausgeglichenen Höhen wurden aber nicht publiziert. Darum auch die Bezeichnung "Gebrauchshöhen". Die Punkte der Landesvermessung werden als HFP1 bezeichnet.
Abb. 5.7 Repère Pierre du Niton
Abb. 5.8 Ausschnitt aus dem Landesnivellement
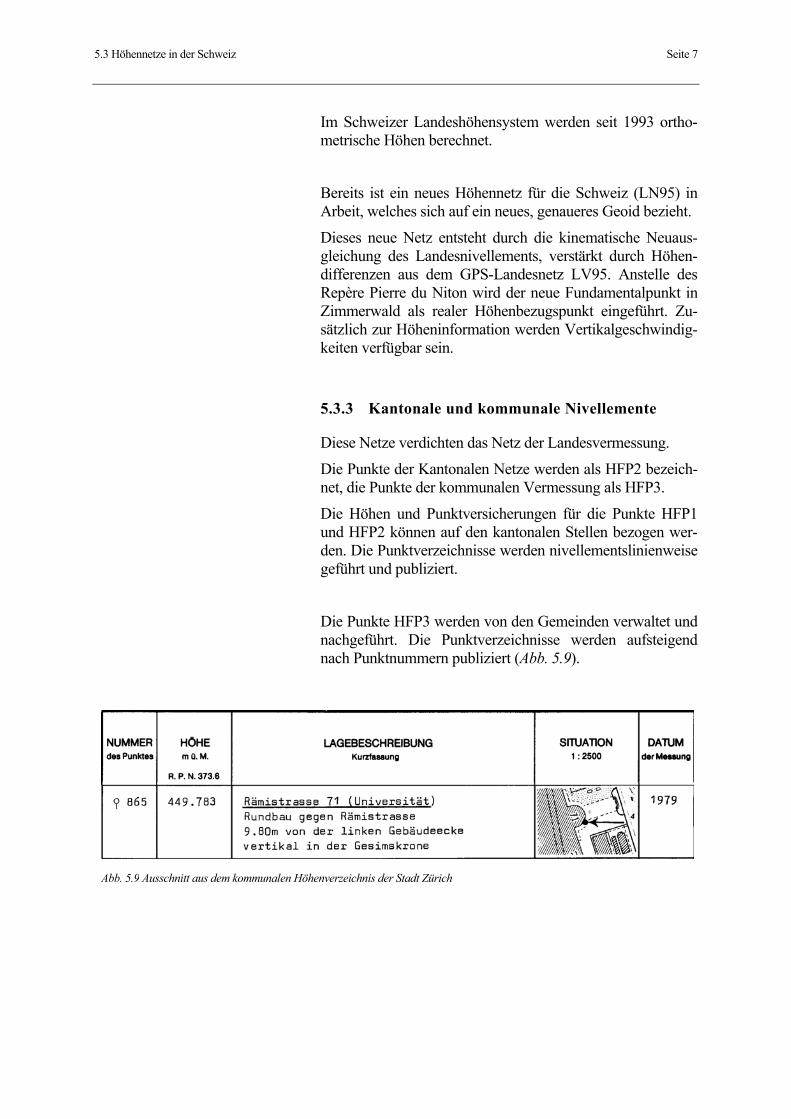
5.3 Höhennetze in der Schweiz Seite 7
Im Schweizer Landeshöhensystem werden seit 1993 ortho-metrische Höhen berechnet.
Bereits ist ein neues Höhennetz für die Schweiz (LN95) in Arbeit, welches sich auf ein neues, genaueres Geoid bezieht.
Dieses neue Netz entsteht durch die kinematische Neuaus-gleichung des Landesnivellements, verstärkt durch Höhen-differenzen aus dem GPS-Landesnetz LV95. Anstelle des Repère Pierre du Niton wird der neue Fundamentalpunkt in Zimmerwald als realer Höhenbezugspunkt eingeführt. Zu-sätzlich zur Höheninformation werden Vertikalgeschwindig-keiten verfügbar sein.
5.3.3 Kantonale und kommunale Nivellemente
Diese Netze verdichten das Netz der Landesvermessung.
Die Punkte der Kantonalen Netze werden als HFP2 bezeich-net, die Punkte der kommunalen Vermessung als HFP3.
Die Höhen und Punktversicherungen für die Punkte HFP1 und HFP2 können auf den kantonalen Stellen bezogen wer-den. Die Punktverzeichnisse werden nivellementslinienweise geführt und publiziert.
Die Punkte HFP3 werden von den Gemeinden verwaltet und nachgeführt. Die Punktverzeichnisse werden aufsteigend nach Punktnummern publiziert (Abb. 5.9).
Abb. 5.9 Ausschnitt aus dem kommunalen Höhenverzeichnis der Stadt Zürich
Seite 8 5. Höhenbestimmung
5.4 Geometrisches Nivellement mit Nivellierinstru-ment
Es gibt grundsätzlich zwei Arten des Nivellements. Das ge-ometrische Nivellement mit horizontalen Visuren, auf das im folgenden Kapitel eingegangen werden soll, sowie das trigo-nometrische Nivellement mit geneigten Visuren und Dis-tanzmessung (vgl. dazu Kap. 5.5).
5.4.1 Prinzip
Zur Messausrüstung für das geometrische Nivellement gehö-ren ein Nivellierinstrument, zwei Nivellierlatten (Abb. 5.10) sowie zwei Lattenuntersätze (Frösche) zur Fixierung der provisorischen Lattenumstellpunkte (Abb. 5.11).
Beispiel (siehe Abb. 5.12):
Der gesuchte Höhenunterschied zwischen dem Höhenfix-punkt (HFP) 622 und dem Lattenumstellpunkt U1 wird wie folgt ermittelt:
Es werden die lotrechten Abstände von der horizontalen Ziellinie zu den Lattenfusspunkten bei HFP 622 und U1 ge-messen. Somit berechnet sich der gesuchte Höhenunter-schied ∆h aus: ∆h = R - V In Gl. 5.4-1 bezeichnet R die Rückblickablesung zu HFP 622 und V die Vorblickablesung zu U1.
Abb. 5.10 Nivellierlatte, empfohlenesLattenbild: „E-Teilung“
Abb. 5.11 Lattenuntersatz (Frosch)bei Umstellpunkten
Erstsemestrige fallen meist durch mangelnde Kenntnis von Fachtermini auf
Gl. 5.4-1
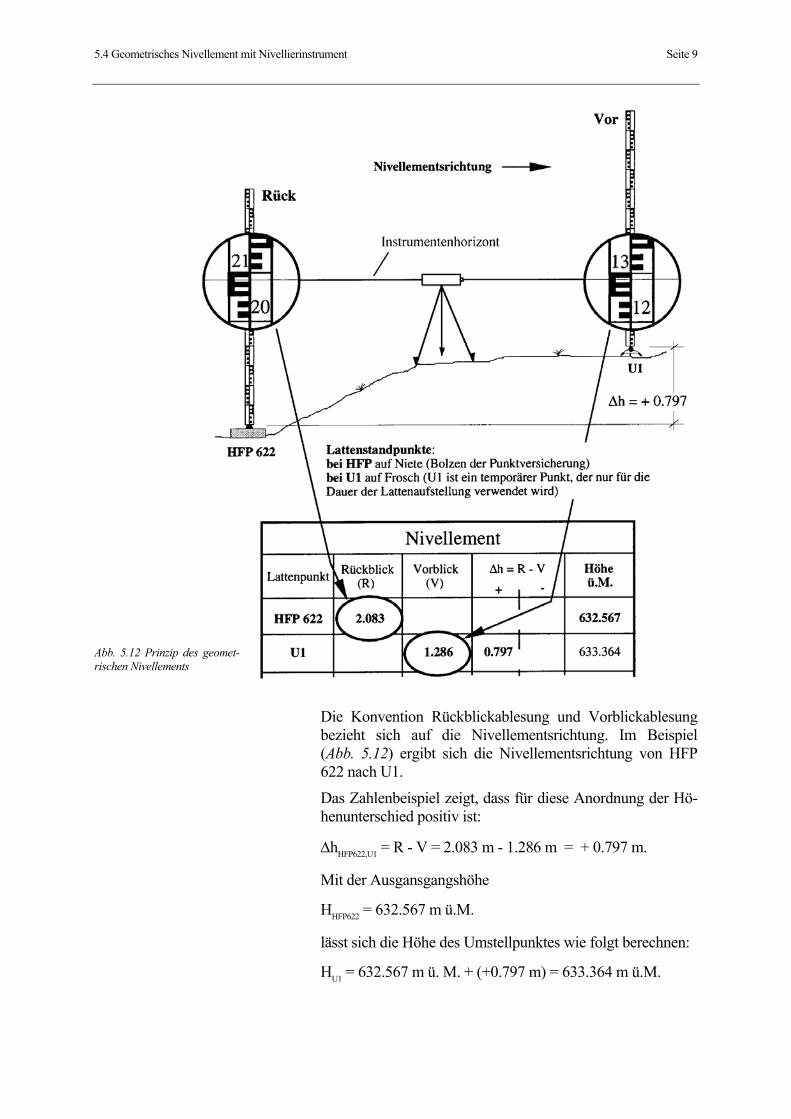
5.4 Geometrisches Nivellement mit Nivellierinstrument Seite 9
Die Konvention Rückblickablesung und Vorblickablesung bezieht sich auf die Nivellementsrichtung. Im Beispiel (Abb. 5.12) ergibt sich die Nivellementsrichtung von HFP 622 nach U1.
Das Zahlenbeispiel zeigt, dass für diese Anordnung der Hö-henunterschied positiv ist:
∆hHFP622,U1 = R - V = 2.083 m - 1.286 m = + 0.797 m.
Mit der Ausgansgangshöhe
HHFP622 = 632.567 m ü.M.
lässt sich die Höhe des Umstellpunktes wie folgt berechnen:
HU1 = 632.567 m ü. M. + (+0.797 m) = 633.364 m ü.M.
Abb. 5.12 Prinzip des geomet-rischen Nivellements
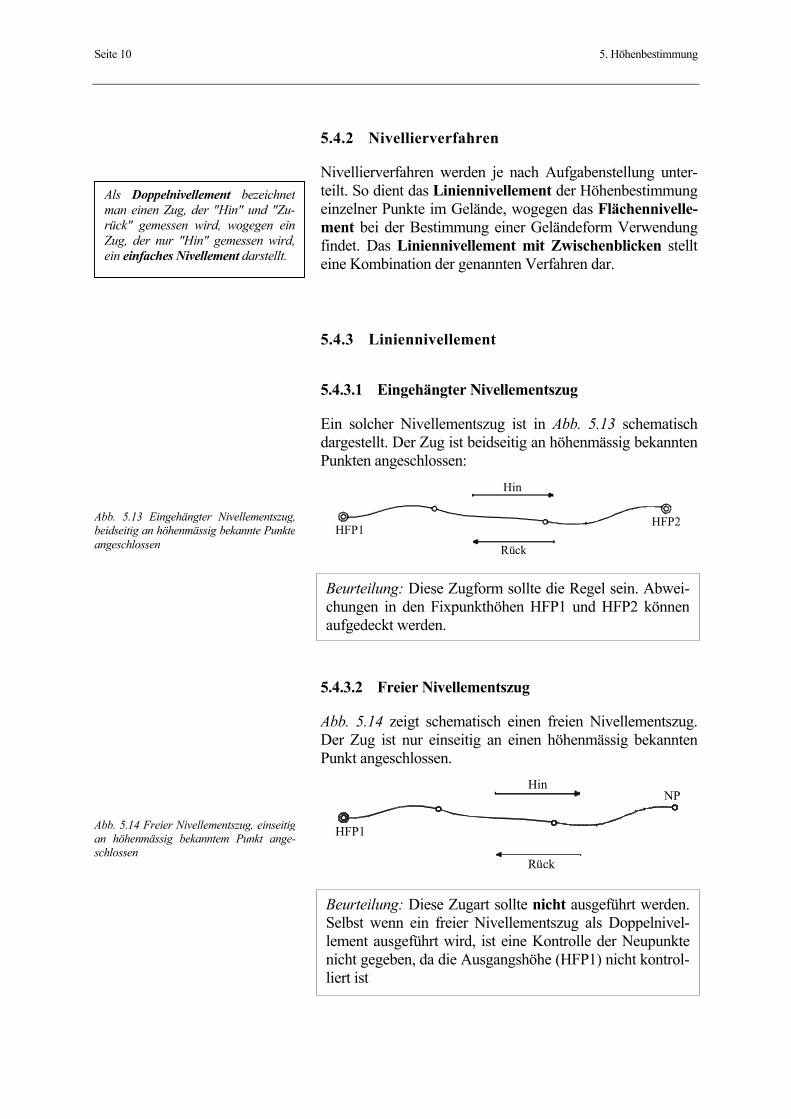
Seite 10 5. Höhenbestimmung
5.4.2 Nivellierverfahren
Nivellierverfahren werden je nach Aufgabenstellung unter-teilt. So dient das Liniennivellement der Höhenbestimmung einzelner Punkte im Gelände, wogegen das Flächennivelle-ment bei der Bestimmung einer Geländeform Verwendung findet. Das Liniennivellement mit Zwischenblicken stellt eine Kombination der genannten Verfahren dar.
5.4.3 Liniennivellement
5.4.3.1 Eingehängter Nivellementszug
Ein solcher Nivellementszug ist in Abb. 5.13 schematisch dargestellt. Der Zug ist beidseitig an höhenmässig bekannten Punkten angeschlossen:
5.4.3.2 Freier Nivellementszug
Abb. 5.14 zeigt schematisch einen freien Nivellementszug. Der Zug ist nur einseitig an einen höhenmässig bekannten Punkt angeschlossen.
HFP1HFP2
Hin
Rück
Beurteilung: Diese Zugform sollte die Regel sein. Abwei-chungen in den Fixpunkthöhen HFP1 und HFP2 könnenaufgedeckt werden.
Abb. 5.13 Eingehängter Nivellementszug,beidseitig an höhenmässig bekannte Punkteangeschlossen
H
NP
FP1
Hin
Rück
Beurteilung: Diese Zugart sollte nicht ausgeführt werden.Selbst wenn ein freier Nivellementszug als Doppelnivel-lement ausgeführt wird, ist eine Kontrolle der Neupunktenicht gegeben, da die Ausgangshöhe (HFP1) nicht kontrol-liert ist
Abb. 5.14 Freier Nivellementszug, einseitigan höhenmässig bekanntem Punkt ange-schlossen
Als Doppelnivellement bezeichnetman einen Zug, der "Hin" und "Zu-rück" gemessen wird, wogegen einZug, der nur "Hin" gemessen wird,ein einfaches Nivellement darstellt.
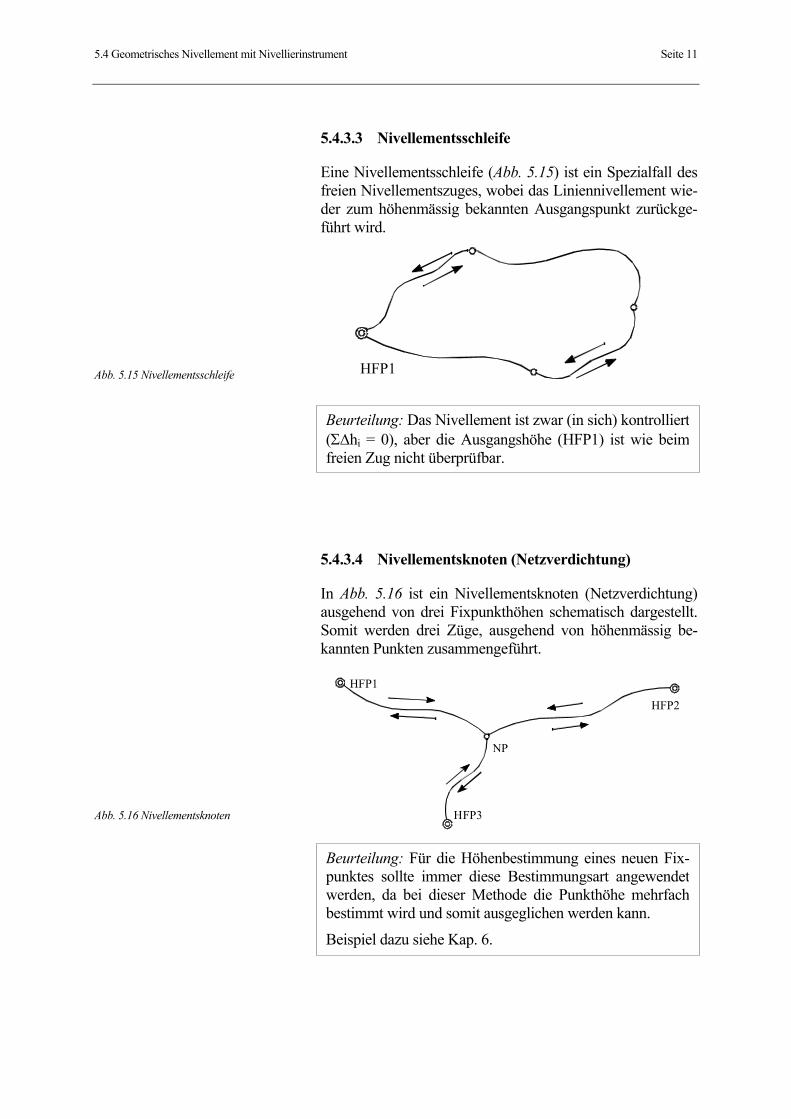
5.4 Geometrisches Nivellement mit Nivellierinstrument Seite 11
5.4.3.3 Nivellementsschleife
Eine Nivellementsschleife (Abb. 5.15) ist ein Spezialfall des freien Nivellementszuges, wobei das Liniennivellement wie-der zum höhenmässig bekannten Ausgangspunkt zurückge-führt wird.
5.4.3.4 Nivellementsknoten (Netzverdichtung)
In Abb. 5.16 ist ein Nivellementsknoten (Netzverdichtung) ausgehend von drei Fixpunkthöhen schematisch dargestellt. Somit werden drei Züge, ausgehend von höhenmässig be-kannten Punkten zusammengeführt.
HFP1
Beurteilung: Das Nivellement ist zwar (in sich) kontrolliert(Σ∆hi = 0), aber die Ausgangshöhe (HFP1) ist wie beimfreien Zug nicht überprüfbar.
Abb. 5.15 Nivellementsschleife
HFP1
HFP2
HFP3
NP
Beurteilung: Für die Höhenbestimmung eines neuen Fix-punktes sollte immer diese Bestimmungsart angewendetwerden, da bei dieser Methode die Punkthöhe mehrfachbestimmt wird und somit ausgeglichen werden kann.
Beispiel dazu siehe Kap. 6.
Abb. 5.16 Nivellementsknoten

Seite 12 5. Höhenbestimmung
5.4.4 Numerisches Beispiel für ein Liniennivelle-ment mit beidseitigem Höhenanschluss
Gegeben sind die Fixpunkthöhen HFP35 sowie HFP39. Es soll die Höhe des Neupunktes NP1 ermittelt werden, wobei die Höhenbestimmung durch ein Doppelnivellement erfolg-te, also durch Hin- und Rücknivellement (Abb. 5.17).
Im Nachfolgenden werden einige Erläuterungen zur Proto-kollführung und zur Berechnung gegeben:
Bezeichnungen:
∆h : ist der Höhenunterschied zwischen zwei benachbarten Lattenumstellpunkten
∆H: ist der Gesamthöhenunterschied (Σ∆h) einer Nivelle-mentsstrecke, z.B. zwischen HFP35 - NP1
Protokollführung
Es sind im Felde sofort die ∆hi sowie am Ende einer Nivel-lementsstrecke ∆H, die Summe der Rückblicke ΣR, die Summe der Vorblicke ΣV, Kontrolle ΣR - ΣV = Σ(R-V), und die Summe der Distanzen ΣD zu berechnen (Tab. 5.3).
Abb. 5.17 Liniennivellement zur Bestimmung der Höhe von NP1 oben: Darstellung im Grundriss unten: Darstellung im Aufriss
532.658 m ü. M.534.816 m ü. M.HFP35
NP1 HFP39
HFP35
NP1
U1U2
38m 37m 35m 36m40m 39m1.825 1.102 1.736 1.012
1.819 1.317
Nivellementsweg (Hin)
DHPF35,NP1 = 225m
1.734
HFP35
NP1
U1U2
38m 37m 35m 36m40m 39m1.825 1.102 1.736 1.012
1.819 1.317
Nivellementsweg (Hin)
DHPF35,NP1 = 225m
1.734
∆H = +1.949mHPF35,NP1
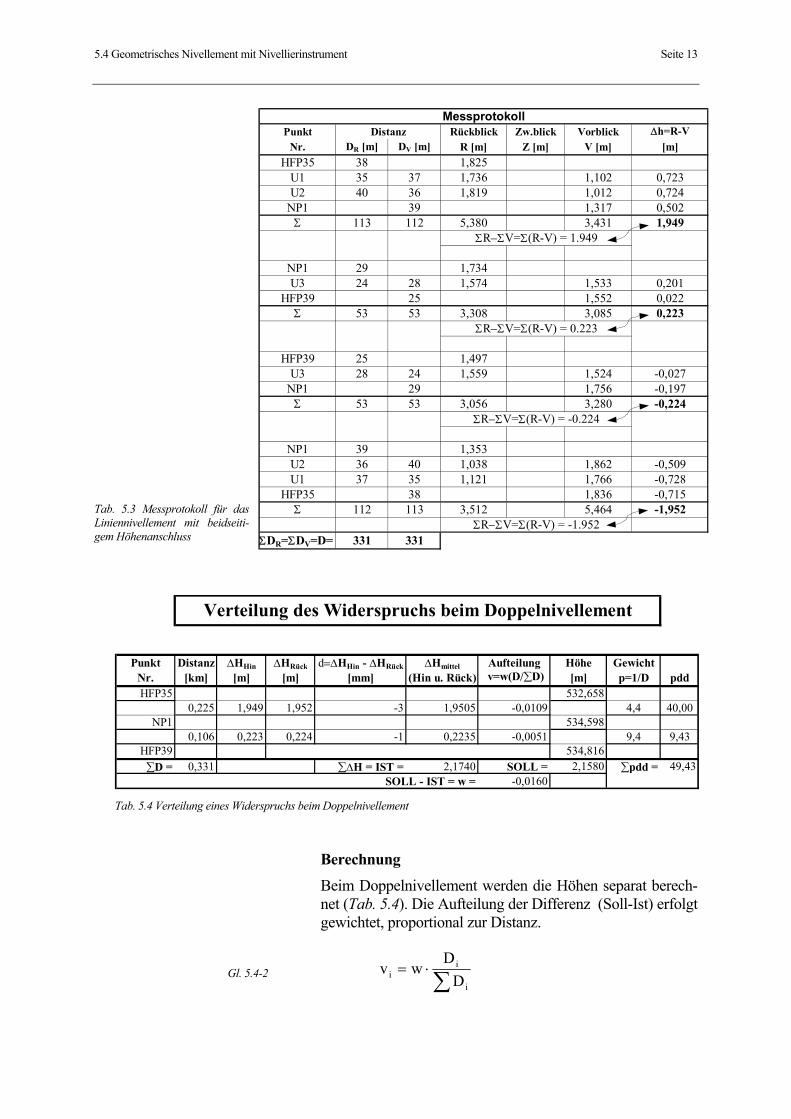
5.4 Geometrisches Nivellement mit Nivellierinstrument Seite 13
Berechnung Beim Doppelnivellement werden die Höhen separat berech-net (Tab. 5.4). Die Aufteilung der Differenz (Soll-Ist) erfolgt gewichtet, proportional zur Distanz.
∑⋅=
i
ii D
Dwv
Gl. 5.4-2
Tab. 5.3 Messprotokoll für dasLiniennivellement mit beidseiti-gem Höhenanschluss
Tab. 5.4 Verteilung eines Widerspruchs beim Doppelnivellement
Punkt Distanz Rückblick Zw.blick Vorblick ∆h=R-VNr. DR [m] DV [m] R [m] Z [m] V [m] [m]
HFP35 38 1,825U1 35 37 1,736 1,102 0,723U2 40 36 1,819 1,012 0,724
NP1 39 1,317 0,502Σ 113 112 5,380 3,431 1,949
NP1 29 1,734U3 24 28 1,574 1,533 0,201
HFP39 25 1,552 0,022Σ 53 53 3,308 3,085 0,223
HFP39 25 1,497U3 28 24 1,559 1,524 -0,027
NP1 29 1,756 -0,197Σ 53 53 3,056 3,280 -0,224
NP1 39 1,353U2 36 40 1,038 1,862 -0,509U1 37 35 1,121 1,766 -0,728
HFP35 38 1,836 -0,715Σ 112 113 3,512 5,464 -1,952
ΣDR=ΣDV=D= 331 331
Messprotokoll
ΣR−ΣV=Σ(R-V) = -1.952
ΣR−ΣV=Σ(R-V) = 1.949
ΣR−ΣV=Σ(R-V) = 0.223
ΣR−ΣV=Σ(R-V) = -0.224
Punkt Distanz ∆HHin ∆HRück d=∆HHin - ∆HRück ∆Hmittel Aufteilung Höhe GewichtNr. [km] [m] [m] [mm] (Hin u. Rück) v=w(D/∑D) [m] p=1/D pddHFP35 532,658
0,225 1,949 1,952 -3 1,9505 -0,0109 4,4 40,00NP1 534,598
0,106 0,223 0,224 -1 0,2235 -0,0051 9,4 9,43HFP39 534,816
∑D = 0,331 ∑∆H = IST = 2,1740 SOLL = 2,1580 ∑pdd = 49,43SOLL - IST = w = -0,0160
Verteilung des Widerspruchs beim Doppelnivellement
Seite 14 5. Höhenbestimmung
In der Regel werden nur die Höhen der gesuchten Punkte oder vermarkten Zwischenpunkte berechnet, also keine Hö-hen der temporären Umstellpunkte.
Zum Beispiel Tab. 5.3, 5.4:
Die Standardabweichung der Gewichtseinheit, d.h. die Stan-dardabweichung für 1 km Weglänge beim Hin- und Rückni-vellement beträgt
wobei n = Anzahl Teilstrecken ist.
Die Standardabweichung am arithmetischen Mittel für 1 km Nivellement (Doppelnivellement) wird
Für die Standardabweichung der gesamten Höhendifferenz zwischen HFP35 und HFP39 gilt
Die hier genannten Begriffe der verschiedenen Standardab-weichungen werden in Kap. 6 behandelt.
Beim einfachen Nivellement kann die Berechnung der Hö-hen direkt im Messprotokoll erfolgen. Die Aufteilung der Differenz (Soll - Ist) sollte auch hier proportional zur Distanz sein.
5.4.5 Flächennivellement
Die Höhenerfassung von Geländeformen (Topographieauf-nahme) und Objekten kann auf zwei Arten erfolgen:
5.4.5.1 Aufnahme diskreter Punkte
Hierbei müssen die Lagen der aufgenommenen Punkte be-kannt sein. Bei einer Geländeaufnahme hat dies mit der Hö-henaufnahme zu erfolgen und zwar durch Vektormessung mit dem Nivellierinstrument. Dazu wird ein Instrument mit Horizontalkreis benötigt, die Distanzmessung erfolgt mit den Distanzfäden der Strichplatte (Reichenbach'sche Distanzstri-che) oder elektronisch bei Digitalnivellieren.
Dieses Verfahren wird auch als Nivelliertachymetrie be-zeichnet (Lagegenauigkeit > 1 dm).
spddnx = =
⋅=
∑2
49 432 2
351.
. mm
ssx
0 22 49= = . mm
ssp
s DHH
[ ] . . .= = = ⋅ =∑00 2 49 0331 143 mm
Gl. 5.4-3
Gl. 5.4-4
Gl. 5.4-5
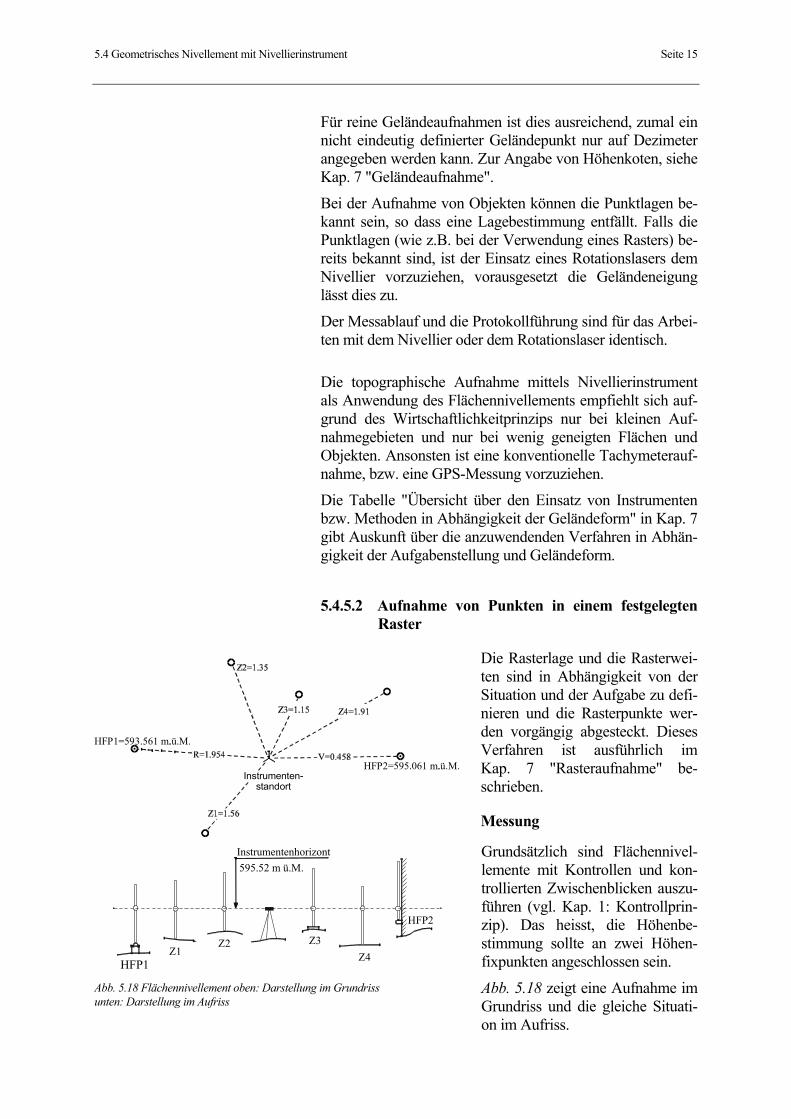
5.4 Geometrisches Nivellement mit Nivellierinstrument Seite 15
Für reine Geländeaufnahmen ist dies ausreichend, zumal ein nicht eindeutig definierter Geländepunkt nur auf Dezimeter angegeben werden kann. Zur Angabe von Höhenkoten, siehe Kap. 7 "Geländeaufnahme".
Bei der Aufnahme von Objekten können die Punktlagen be-kannt sein, so dass eine Lagebestimmung entfällt. Falls die Punktlagen (wie z.B. bei der Verwendung eines Rasters) be-reits bekannt sind, ist der Einsatz eines Rotationslasers dem Nivellier vorzuziehen, vorausgesetzt die Geländeneigung lässt dies zu.
Der Messablauf und die Protokollführung sind für das Arbei-ten mit dem Nivellier oder dem Rotationslaser identisch.
Die topographische Aufnahme mittels Nivellierinstrument als Anwendung des Flächennivellements empfiehlt sich auf-grund des Wirtschaftlichkeitprinzips nur bei kleinen Auf-nahmegebieten und nur bei wenig geneigten Flächen und Objekten. Ansonsten ist eine konventionelle Tachymeterauf-nahme, bzw. eine GPS-Messung vorzuziehen.
Die Tabelle "Übersicht über den Einsatz von Instrumenten bzw. Methoden in Abhängigkeit der Geländeform" in Kap. 7 gibt Auskunft über die anzuwendenden Verfahren in Abhän-gigkeit der Aufgabenstellung und Geländeform.
5.4.5.2 Aufnahme von Punkten in einem festgelegten Raster
Die Rasterlage und die Rasterwei-ten sind in Abhängigkeit von der Situation und der Aufgabe zu defi-nieren und die Rasterpunkte wer-den vorgängig abgesteckt. Dieses Verfahren ist ausführlich im Kap. 7 "Rasteraufnahme" be-schrieben.
Messung
Grundsätzlich sind Flächennivel-lemente mit Kontrollen und kon-trollierten Zwischenblicken auszu-führen (vgl. Kap. 1: Kontrollprin-zip). Das heisst, die Höhenbe-stimmung sollte an zwei Höhen-fixpunkten angeschlossen sein.
Abb. 5.18 zeigt eine Aufnahme im Grundriss und die gleiche Situati-on im Aufriss.
HFP2
Z1Z2 Z3
Z4
Instrumentenhorizont595.52 m ü.M.
HFP1
HFP1=593.561 m.ü. .M.
HFP2=595.061 m.ü. .M.Instrumenten-
standort
Abb. 5.18 Flächennivellement oben: Darstellung im Grundriss unten: Darstellung im Aufriss
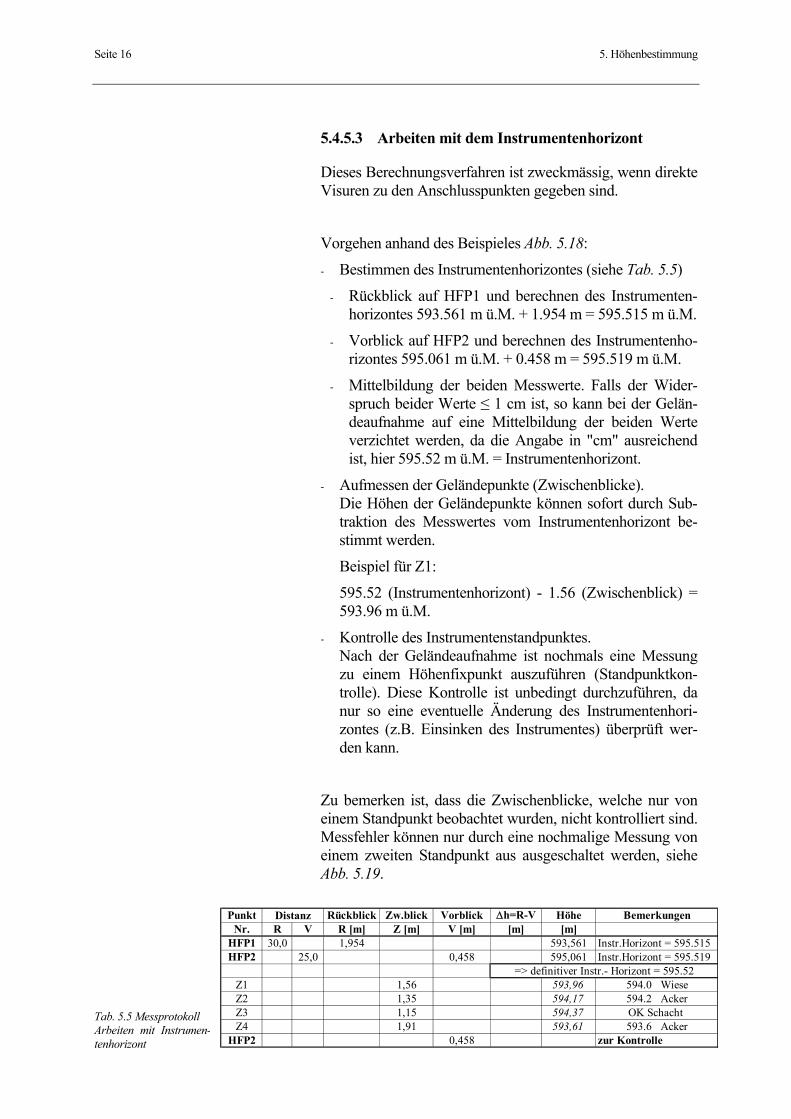
Seite 16 5. Höhenbestimmung
5.4.5.3 Arbeiten mit dem Instrumentenhorizont
Dieses Berechnungsverfahren ist zweckmässig, wenn direkte Visuren zu den Anschlusspunkten gegeben sind.
Vorgehen anhand des Beispieles Abb. 5.18:
- Bestimmen des Instrumentenhorizontes (siehe Tab. 5.5)
- Rückblick auf HFP1 und berechnen des Instrumenten-horizontes 593.561 m ü.M. + 1.954 m = 595.515 m ü.M.
- Vorblick auf HFP2 und berechnen des Instrumentenho-rizontes 595.061 m ü.M. + 0.458 m = 595.519 m ü.M.
- Mittelbildung der beiden Messwerte. Falls der Wider-spruch beider Werte ≤ 1 cm ist, so kann bei der Gelän-deaufnahme auf eine Mittelbildung der beiden Werte verzichtet werden, da die Angabe in "cm" ausreichend ist, hier 595.52 m ü.M. = Instrumentenhorizont.
- Aufmessen der Geländepunkte (Zwischenblicke). Die Höhen der Geländepunkte können sofort durch Sub-traktion des Messwertes vom Instrumentenhorizont be-stimmt werden.
Beispiel für Z1:
595.52 (Instrumentenhorizont) - 1.56 (Zwischenblick) = 593.96 m ü.M.
- Kontrolle des Instrumentenstandpunktes. Nach der Geländeaufnahme ist nochmals eine Messung zu einem Höhenfixpunkt auszuführen (Standpunktkon-trolle). Diese Kontrolle ist unbedingt durchzuführen, da nur so eine eventuelle Änderung des Instrumentenhori-zontes (z.B. Einsinken des Instrumentes) überprüft wer-den kann.
Zu bemerken ist, dass die Zwischenblicke, welche nur von einem Standpunkt beobachtet wurden, nicht kontrolliert sind. Messfehler können nur durch eine nochmalige Messung von einem zweiten Standpunkt aus ausgeschaltet werden, siehe Abb. 5.19.
Tab. 5.5 Messprotokoll Arbeiten mit Instrumen-tenhorizont
Punkt Rückblick Zw.blick Vorblick ∆h=R-V Höhe BemerkungenNr. R V R [m] Z [m] V [m] [m] [m]
HFP1 30,0 1,954 593,561 Instr.Horizont = 595.515HFP2 25,0 0,458 595,061 Instr.Horizont = 595.519
Z1 1,56 593,96 594.0 WieseZ2 1,35 594,17 594.2 AckerZ3 1,15 594,37 OK Schacht Z4 1,91 593,61 593.6 Acker
HFP2 0,458 zur Kontrolle
Distanz
=> definitiver Instr.- Horizont = 595.52
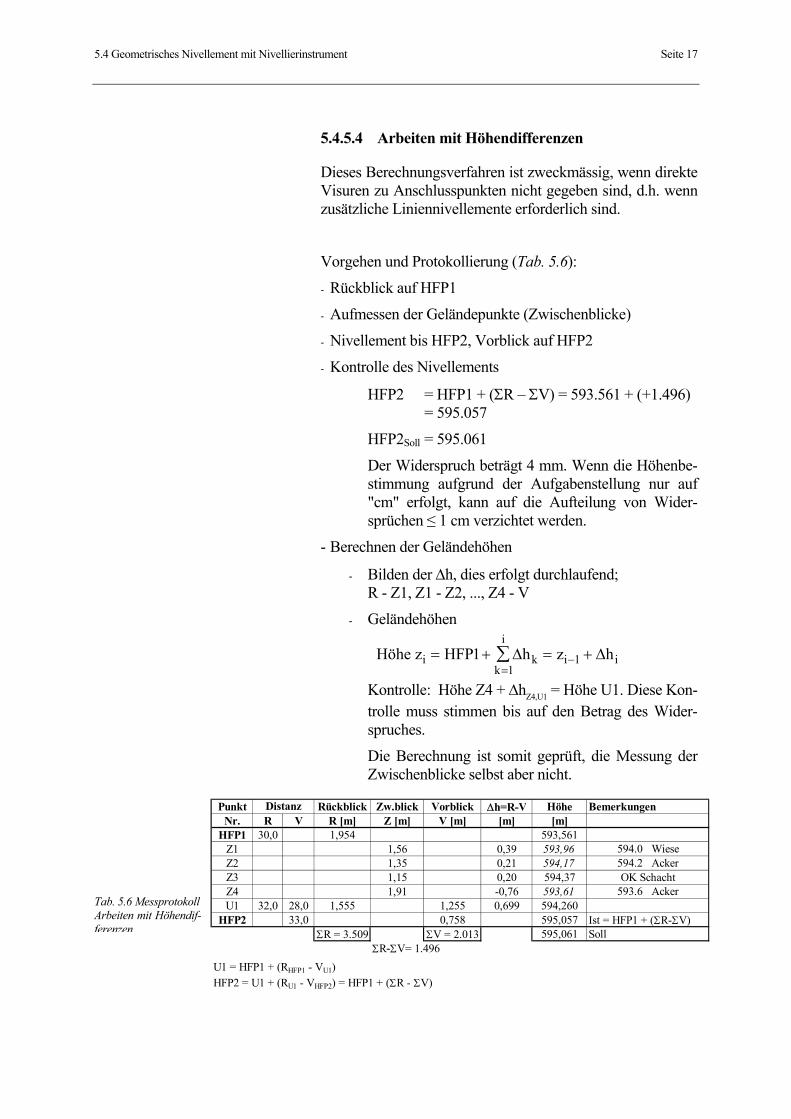
5.4 Geometrisches Nivellement mit Nivellierinstrument Seite 17
5.4.5.4 Arbeiten mit Höhendifferenzen
Dieses Berechnungsverfahren ist zweckmässig, wenn direkte Visuren zu Anschlusspunkten nicht gegeben sind, d.h. wenn zusätzliche Liniennivellemente erforderlich sind.
Vorgehen und Protokollierung (Tab. 5.6):
- Rückblick auf HFP1
- Aufmessen der Geländepunkte (Zwischenblicke)
- Nivellement bis HFP2, Vorblick auf HFP2
- Kontrolle des Nivellements
HFP2 = HFP1 + (ΣR – ΣV) = 593.561 + (+1.496) = 595.057
HFP2Soll = 595.061
Der Widerspruch beträgt 4 mm. Wenn die Höhenbe-stimmung aufgrund der Aufgabenstellung nur auf "cm" erfolgt, kann auf die Aufteilung von Wider-sprüchen ≤ 1 cm verzichtet werden.
- Berechnen der Geländehöhen
- Bilden der ∆h, dies erfolgt durchlaufend; R - Z1, Z1 - Z2, ..., Z4 - V
- Geländehöhen
Kontrolle: Höhe Z4 + ∆hZ4,U1 = Höhe U1. Diese Kon-trolle muss stimmen bis auf den Betrag des Wider-spruches.
Die Berechnung ist somit geprüft, die Messung der Zwischenblicke selbst aber nicht.
Höhe zi k i ik
iHFP h z h= + = +−
=∑1 1
1∆ ∆
Tab. 5.6 Messprotokoll Arbeiten mit Höhendif-ferenzen
Punkt Rückblick Zw.blick Vorblick ∆h=R-V Höhe BemerkungenNr. R V R [m] Z [m] V [m] [m] [m]
HFP1 30,0 1,954 593,561Z1 1,56 0,39 593,96 594.0 WieseZ2 1,35 0,21 594,17 594.2 AckerZ3 1,15 0,20 594,37 OK SchachtZ4 1,91 -0,76 593,61 593.6 AckerU1 32,0 28,0 1,555 1,255 0,699 594,260
HFP2 33,0 0,758 595,057 Ist = HFP1 + (ΣR-ΣV)ΣR = 3.509 ΣV = 2.013 595,061 Soll
ΣR-ΣV= 1.496U1 = HFP1 + (RHFP1 - VU1)HFP2 = U1 + (RU1 - VHFP2) = HFP1 + (ΣR - ΣV)
Distanz
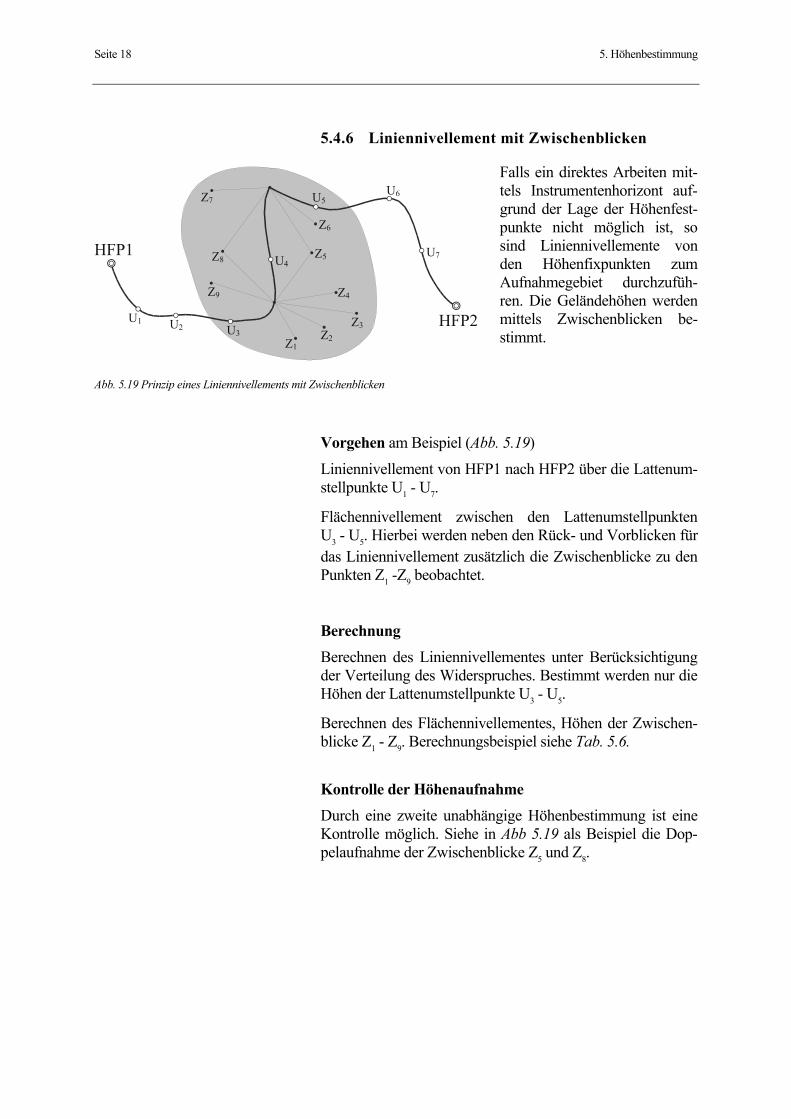
Seite 18 5. Höhenbestimmung
5.4.6 Liniennivellement mit Zwischenblicken
Falls ein direktes Arbeiten mit-tels Instrumentenhorizont auf-grund der Lage der Höhenfest-punkte nicht möglich ist, so sind Liniennivellemente von den Höhenfixpunkten zum Aufnahmegebiet durchzufüh-ren. Die Geländehöhen werden mittels Zwischenblicken be-stimmt.
Vorgehen am Beispiel (Abb. 5.19)
Liniennivellement von HFP1 nach HFP2 über die Lattenum-stellpunkte U1 - U7.
Flächennivellement zwischen den Lattenumstellpunkten U3 - U5. Hierbei werden neben den Rück- und Vorblicken für das Liniennivellement zusätzlich die Zwischenblicke zu den Punkten Z1 -Z9 beobachtet.
Berechnung Berechnen des Liniennivellementes unter Berücksichtigung der Verteilung des Widerspruches. Bestimmt werden nur die Höhen der Lattenumstellpunkte U3 - U5.
Berechnen des Flächennivellementes, Höhen der Zwischen-blicke Z1 - Z9. Berechnungsbeispiel siehe Tab. 5.6.
Kontrolle der Höhenaufnahme Durch eine zweite unabhängige Höhenbestimmung ist eine Kontrolle möglich. Siehe in Abb 5.19 als Beispiel die Dop-pelaufnahme der Zwischenblicke Z5 und Z8.
Abb. 5.19 Prinzip eines Liniennivellements mit Zwischenblicken
Z8
U1 U2 U3
U4
U5U6
U7
Z1Z2
Z4
Z3
Z5
Z6
Z7
Z9
HFP2
HFP1
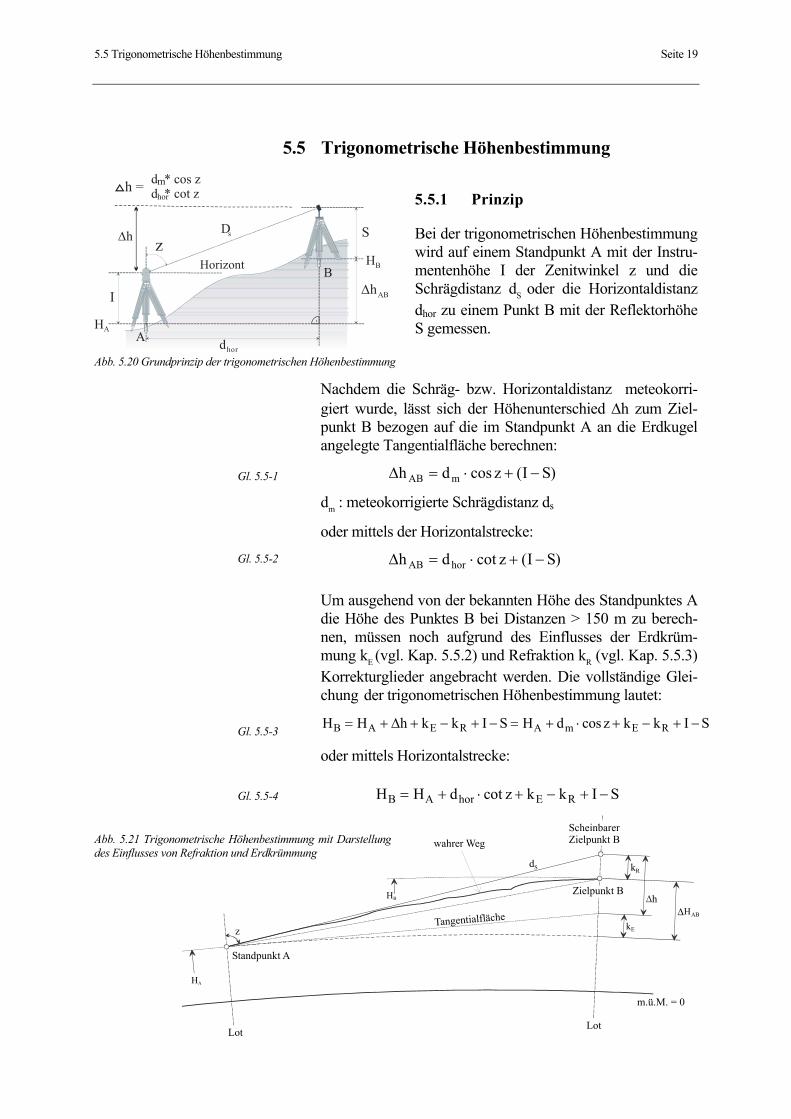
5.5 Trigonometrische Höhenbestimmung Seite 19
5.5 Trigonometrische Höhenbestimmung
5.5.1 Prinzip
Bei der trigonometrischen Höhenbestimmung wird auf einem Standpunkt A mit der Instru-mentenhöhe I der Zenitwinkel z und die Schrägdistanz dS oder die Horizontaldistanz dhor zu einem Punkt B mit der Reflektorhöhe S gemessen.
Nachdem die Schräg- bzw. Horizontaldistanz meteokorri-giert wurde, lässt sich der Höhenunterschied ∆h zum Ziel-punkt B bezogen auf die im Standpunkt A an die Erdkugel angelegte Tangentialfläche berechnen:
)SI(zcosdh mAB −+⋅=∆
dm : meteokorrigierte Schrägdistanz ds
oder mittels der Horizontalstrecke:
)SI(zcotdh horAB −+⋅=∆ Um ausgehend von der bekannten Höhe des Standpunktes A die Höhe des Punktes B bei Distanzen > 150 m zu berech-nen, müssen noch aufgrund des Einflusses der Erdkrüm-mung kE (vgl. Kap. 5.5.2) und Refraktion kR (vgl. Kap. 5.5.3) Korrekturglieder angebracht werden. Die vollständige Glei-chung der trigonometrischen Höhenbestimmung lautet:
oder mittels Horizontalstrecke:
kE
∆HAB
h
kRdS
z
Tangentialfläche
Standpunkt A
HA
HBZielpunkt B
m.ü.M. = 0
LotLot
wahrer WegScheinbarerZielpunkt B
H H h k k I S H d z k k I SB A E R A m E R= + + − + − = + ⋅ + − + −∆ cos
Gl. 5.5-1
Gl. 5.5-2
Gl. 5.5-3
Abb. 5.20 Grundprinzip der trigonometrischen Höhenbestimmung
H H d z k k I SB A hor E R= + ⋅ + − + −cotGl. 5.5-4
Abb. 5.21 Trigonometrische Höhenbestimmung mit Darstellungdes Einflusses von Refraktion und Erdkrümmung
z
I ∆h
S
dhor
HA
HBB
A
Ds
Horizont
AB
d * cos zd * cot zh = m
hor
∆h
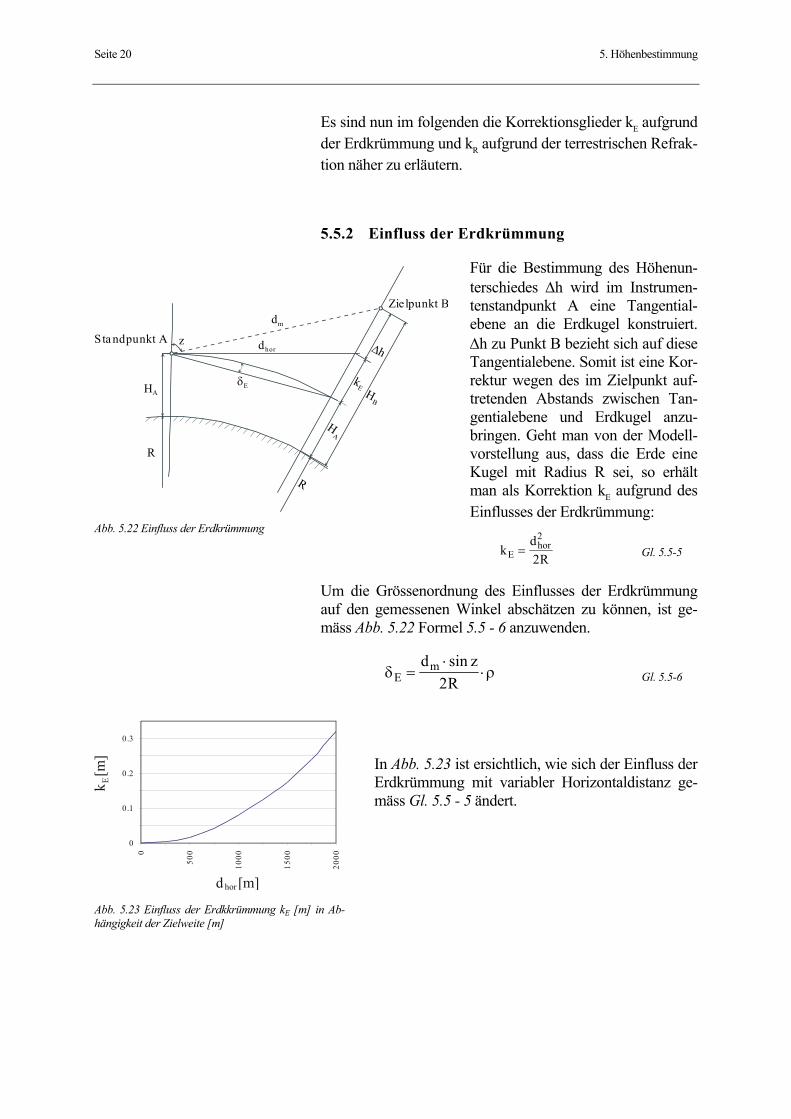
Seite 20 5. Höhenbestimmung
Es sind nun im folgenden die Korrektionsglieder kE aufgrund der Erdkrümmung und kR aufgrund der terrestrischen Refrak-tion näher zu erläutern.
5.5.2 Einfluss der Erdkrümmung
Für die Bestimmung des Höhenun-terschiedes ∆h wird im Instrumen-tenstandpunkt A eine Tangential-ebene an die Erdkugel konstruiert. ∆h zu Punkt B bezieht sich auf diese Tangentialebene. Somit ist eine Kor-rektur wegen des im Zielpunkt auf-tretenden Abstands zwischen Tan-gentialebene und Erdkugel anzu-bringen. Geht man von der Modell-vorstellung aus, dass die Erde eine Kugel mit Radius R sei, so erhält man als Korrektion kE aufgrund des Einflusses der Erdkrümmung:
Um die Grössenordnung des Einflusses der Erdkrümmung auf den gemessenen Winkel abschätzen zu können, ist ge-mäss Abb. 5.22 Formel 5.5 - 6 anzuwenden.
In Abb. 5.23 ist ersichtlich, wie sich der Einfluss der Erdkrümmung mit variabler Horizontaldistanz ge-mäss Gl. 5.5 - 5 ändert.
Abb. 5.22 Einfluss der Erdkrümmung
kd
REhor=2
2 Gl. 5.5-5
δ ρEmd z
R=
⋅⋅
sin2 Gl. 5.5-6
Abb. 5.23 Einfluss der Erdkkrümmung kE [m] in Ab-hängigkeit der Zielweite [m]
Sta ndpunkt A
Zielpunkt B
dhor
HB
∆h
kEHA
HA
R
R
z
δE
dm
0
0.1
0.2
0.3
0
500
1000
1500
2000
d [m]hor
k[m
]E
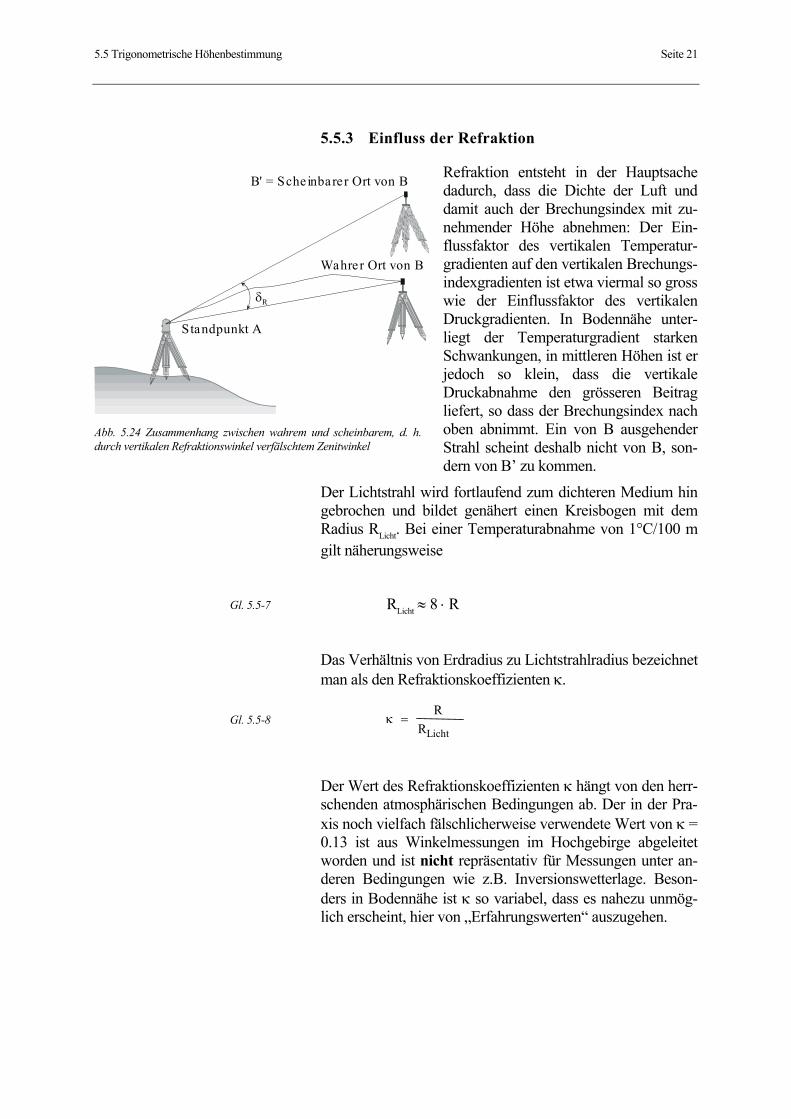
5.5 Trigonometrische Höhenbestimmung Seite 21
5.5.3 Einfluss der Refraktion
Refraktion entsteht in der Hauptsache dadurch, dass die Dichte der Luft und damit auch der Brechungsindex mit zu-nehmender Höhe abnehmen: Der Ein-flussfaktor des vertikalen Temperatur-gradienten auf den vertikalen Brechungs-indexgradienten ist etwa viermal so gross wie der Einflussfaktor des vertikalen Druckgradienten. In Bodennähe unter-liegt der Temperaturgradient starken Schwankungen, in mittleren Höhen ist er jedoch so klein, dass die vertikale Druckabnahme den grösseren Beitrag liefert, so dass der Brechungsindex nach oben abnimmt. Ein von B ausgehender Strahl scheint deshalb nicht von B, son-dern von B’ zu kommen.
Der Lichtstrahl wird fortlaufend zum dichteren Medium hin gebrochen und bildet genähert einen Kreisbogen mit dem Radius RLicht. Bei einer Temperaturabnahme von 1°C/100 m gilt näherungsweise
RLicht ≈ 8 ⋅ R
Das Verhältnis von Erdradius zu Lichtstrahlradius bezeichnet man als den Refraktionskoeffizienten κ.
Der Wert des Refraktionskoeffizienten κ hängt von den herr-schenden atmosphärischen Bedingungen ab. Der in der Pra-xis noch vielfach fälschlicherweise verwendete Wert von κ = 0.13 ist aus Winkelmessungen im Hochgebirge abgeleitet worden und ist nicht repräsentativ für Messungen unter an-deren Bedingungen wie z.B. Inversionswetterlage. Beson-ders in Bodennähe ist κ so variabel, dass es nahezu unmög-lich erscheint, hier von „Erfahrungswerten“ auszugehen.
Abb. 5.24 Zusammenhang zwischen wahrem und scheinbarem, d. h.durch vertikalen Refraktionswinkel verfälschtem Zenitwinkel
Gl. 5.5-7
κ =R
RLichtGl. 5.5-8
Standpunkt A
Wahrer Ort von B
B' = Scheinbarer Ort von B
δR
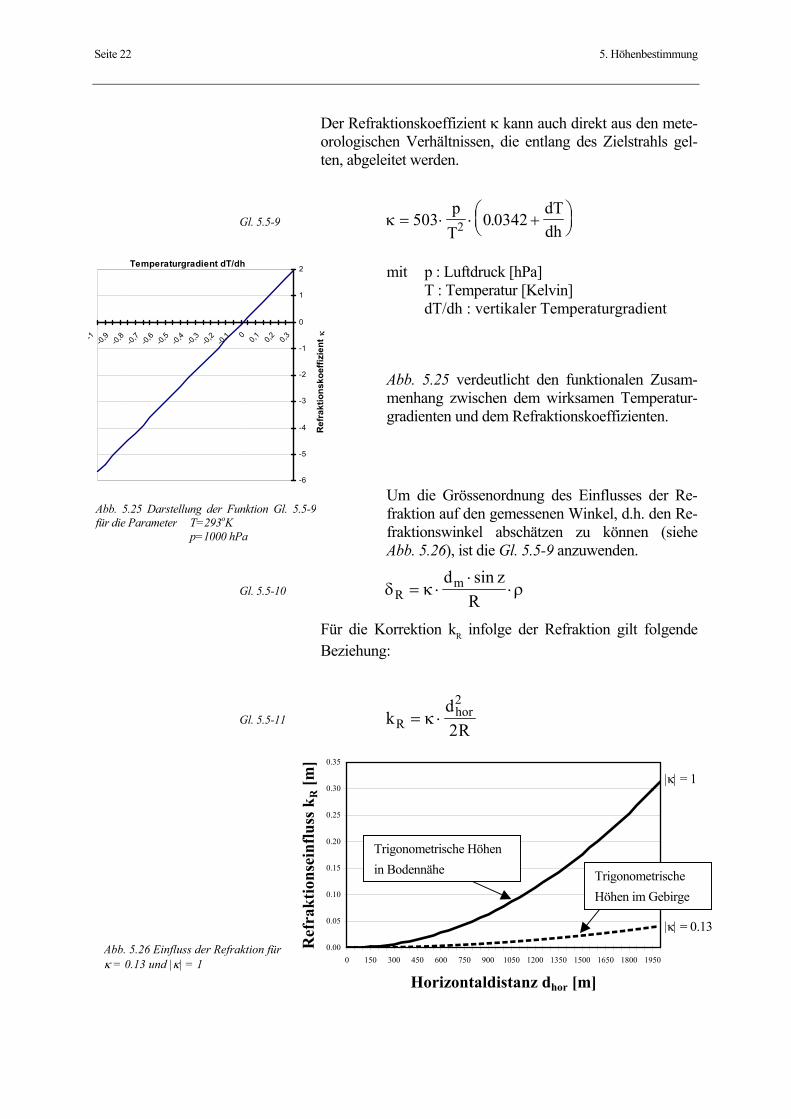
Seite 22 5. Höhenbestimmung
Der Refraktionskoeffizient κ kann auch direkt aus den mete-orologischen Verhältnissen, die entlang des Zielstrahls gel-ten, abgeleitet werden.
mit p : Luftdruck [hPa] T : Temperatur [Kelvin] dT/dh : vertikaler Temperaturgradient
Abb. 5.25 verdeutlicht den funktionalen Zusam-menhang zwischen dem wirksamen Temperatur-gradienten und dem Refraktionskoeffizienten.
Um die Grössenordnung des Einflusses der Re-fraktion auf den gemessenen Winkel, d.h. den Re-fraktionswinkel abschätzen zu können (siehe Abb. 5.26), ist die Gl. 5.5-9 anzuwenden.
Für die Korrektion kR infolge der Refraktion gilt folgende Beziehung:
-6
-5
-4
-3
-2
-1
0
1
2
0,30,20,10-0,
1-0,
2-0,
3-0,
4-0,
5-0,
6-0,
7-0,
8-0,
9-1
Temperaturgradient dT/dh
Ref
rakt
ions
koef
fizie
nt κ
κ = ⋅ ⋅ +
503 0 03422
pT
dTdh
.
δ κ ρRmd z
R= ⋅
⋅⋅
sinGl. 5.5-10
kd
RRhor= ⋅κ2
2Gl. 5.5-11
Abb. 5.26 Einfluss der Refraktion für κ = 0.13 und |κ| = 1
Gl. 5.5-9
Abb. 5.25 Darstellung der Funktion Gl. 5.5-9für die Parameter T=293oK p=1000 hPa
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.35
0 150 300 450 600 750 900 1050 1200 1350 1500 1650 1800 1950
Horizontaldistanz dhor [m]
Ref
rakt
ions
einf
luss
kR [m
]
Trigonometrische Höhen in Bodennähe Trigonometrische
Höhen im Gebirge
|κ| = 1
|κ| = 0.13

5.5 Trigonometrische Höhenbestimmung Seite 23
5.5.4 Gegenseitig-gleichzeitige Zenitwinkelbeobach-tung
Sofern der Refraktionskoeffizient nicht bekannt ist, führt die trigonometrische Höhenbestimmung zu systematischen Ab-weichungen. Wenn jedoch der Zenitwinkel von A nach B und gleichzeitig von B nach A bestimmt wird, kann der Re-fraktionskoeffizient unter der Annahme, dass der Lichtstrahl zwischen den beiden Punkten ein Kreisbogen ist, nähe-rungsweise abgeschätzt werden.
Wie ersichtlich ist, fällt bei der Addition der beiden Glei-chungen der Term für Refraktionseinfluss (kE) und Erd-krümmungseinfluss (kR) heraus.
Wenn z.B. zur Distanzreduktion der Refraktionskoeffizient κ benötigt wird, da die wirksamen meteorologischen Parame-ter, insbesondere der vertikale Temperaturgradient dT/dh, in Gl. 5.5-9 , im Allgemeinen nicht zugänglich sind, lässt sich der Refraktionskoeffizient näherungsweise berechnen, indem man den gemittelten Höhenunterschied in eine der beiden Ausgangsformeln einsetzt:
Je nachdem, für welchen Standpunkt man κ berechnet, setzt man für z, I und S die entsprechenden Werte ein.
Keine einseitigen trigonometrischenHöhenübertragungen über längereDistanzen ohne Bestimmung destatsächlichen Refraktionskoeffizien-ten!
[ ]
∆
∆
∆
H zR
d I S
H d zR
d I S
h d z z I I S
hin hor A hor A B
rück hor B hor B A
hor A B A B A B
= ⋅ +−
⋅ + −
= − ⋅ −−
⋅ − +
= ⋅ − + − + −
d cot
cot
(cot cot ) ( ) (S )
12
12
2
2
12
κ
κ
Gl. 5.5-12
Gl. 5.5-13
Gl. 5.5-14
( )κ = − − ⋅ − + +2
12R
dh d z I S
horhor∆ cotGl. 5.5-15
Die Voraussetzung, dass die Refraktionswinkel auf A und BδA = δB = δR gleich gross sind, ist v.a. bei bodennahen Ziellinienoder bei gegenseitigen Zenitwinkelmessungen zu verschiedenenZeitpunkten mit unterschiedlichen meteorologischen Bedingungenim Allgemeinen nicht gegeben.
Die im Kap. 5.5.4 angegebenen For-meln gelten nur bei flachen Visuren.
Bei geneigten Visuren sind die For-meln der Landesvermessung zu ver-wenden.
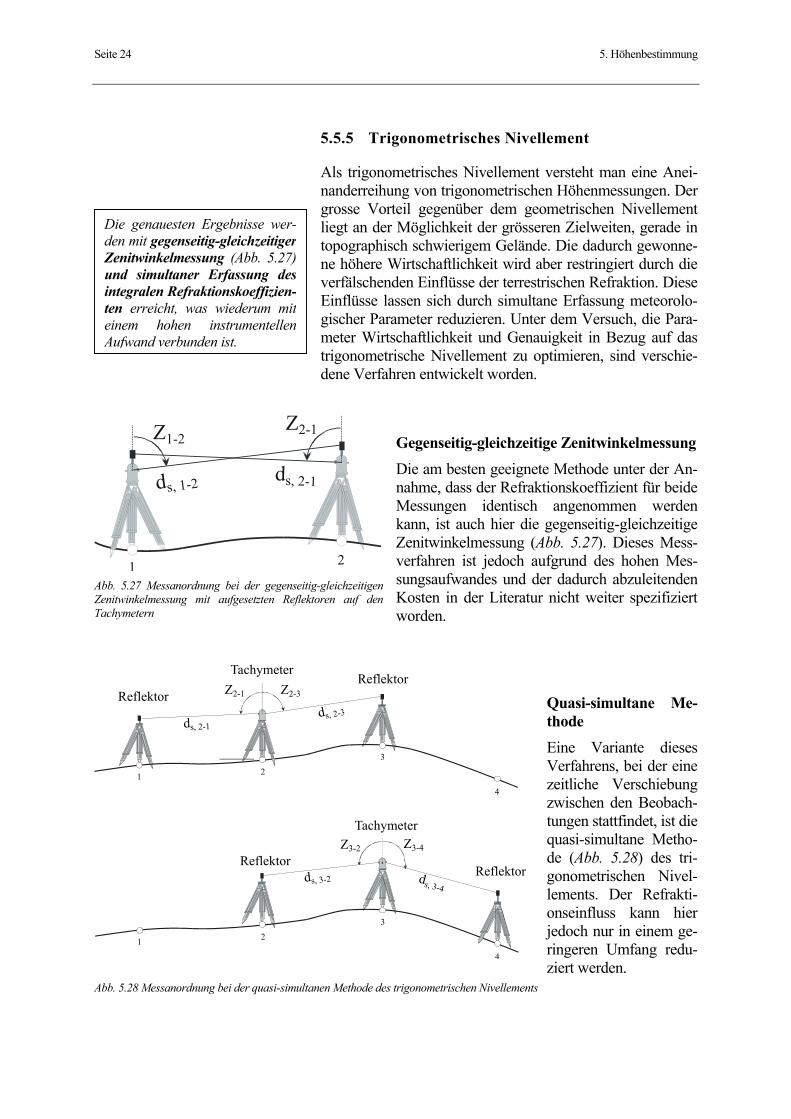
Seite 24 5. Höhenbestimmung
5.5.5 Trigonometrisches Nivellement
Als trigonometrisches Nivellement versteht man eine Anei-nanderreihung von trigonometrischen Höhenmessungen. Der grosse Vorteil gegenüber dem geometrischen Nivellement liegt an der Möglichkeit der grösseren Zielweiten, gerade in topographisch schwierigem Gelände. Die dadurch gewonne-ne höhere Wirtschaftlichkeit wird aber restringiert durch die verfälschenden Einflüsse der terrestrischen Refraktion. Diese Einflüsse lassen sich durch simultane Erfassung meteorolo-gischer Parameter reduzieren. Unter dem Versuch, die Para-meter Wirtschaftlichkeit und Genauigkeit in Bezug auf das trigonometrische Nivellement zu optimieren, sind verschie-dene Verfahren entwickelt worden.
Gegenseitig-gleichzeitige Zenitwinkelmessung Die am besten geeignete Methode unter der An-nahme, dass der Refraktionskoeffizient für beide Messungen identisch angenommen werden kann, ist auch hier die gegenseitig-gleichzeitige Zenitwinkelmessung (Abb. 5.27). Dieses Mess-verfahren ist jedoch aufgrund des hohen Mes-sungsaufwandes und der dadurch abzuleitenden Kosten in der Literatur nicht weiter spezifiziert worden.
Quasi-simultane Me-thode Eine Variante dieses Verfahrens, bei der eine zeitliche Verschiebung zwischen den Beobach-tungen stattfindet, ist die quasi-simultane Metho-de (Abb. 5.28) des tri-gonometrischen Nivel-lements. Der Refrakti-onseinfluss kann hier jedoch nur in einem ge-ringeren Umfang redu-ziert werden.
Abb. 5.27 Messanordnung bei der gegenseitig-gleichzeitigenZenitwinkelmessung mit aufgesetzten Reflektoren auf denTachymetern
Die genauesten Ergebnisse wer-den mit gegenseitig-gleichzeitigerZenitwinkelmessung (Abb. 5.27)und simultaner Erfassung desintegralen Refraktionskoeffizien-ten erreicht, was wiederum miteinem hohen instrumentellenAufwand verbunden ist.
Abb. 5.28 Messanordnung bei der quasi-simultanen Methode des trigonometrischen Nivellements
1
1
2
2
3
3
4
4
Reflektor
Reflektor
Reflektor
Reflektor
Tachymeter
Tachymeter
Z2-3
ds, 2-1ds, 2-3
Z2-1
Z3-2
ds, 3-2 ds, 3-4
Z3-4
Z1-2
ds, 1-2 ds, 2-1
Z2-1
1 2
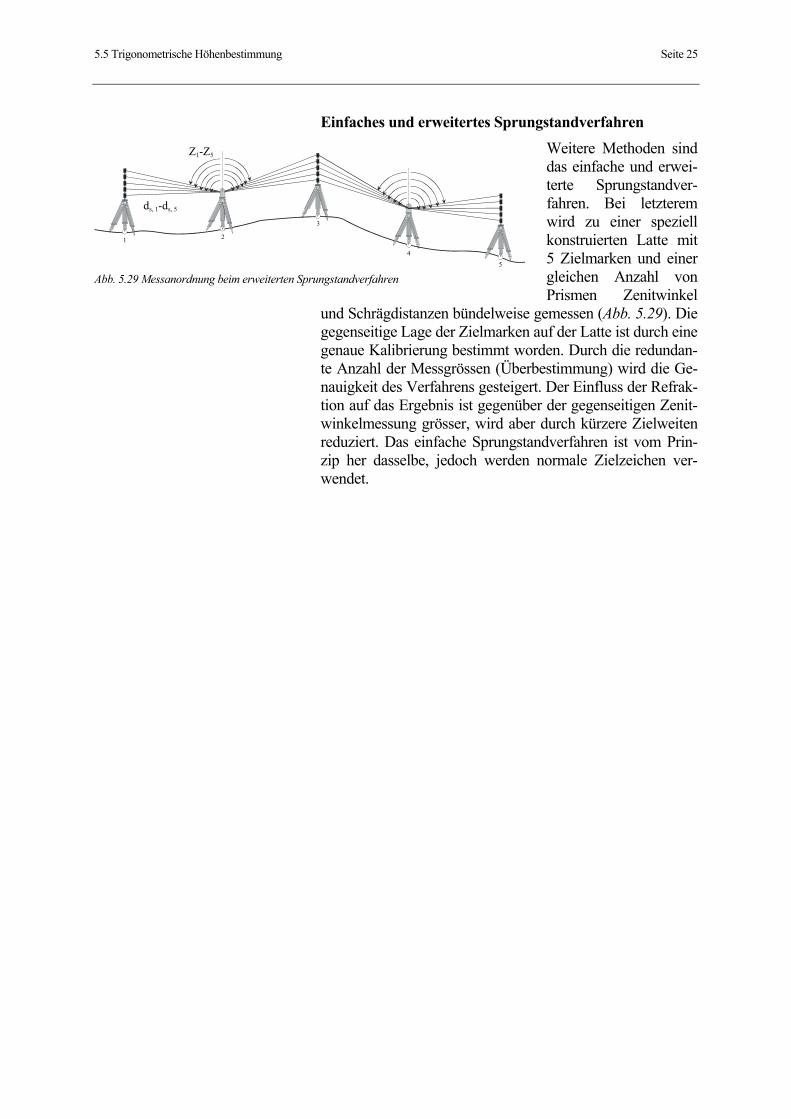
5.5 Trigonometrische Höhenbestimmung Seite 25
Einfaches und erweitertes Sprungstandverfahren Weitere Methoden sind das einfache und erwei-terte Sprungstandver-fahren. Bei letzterem wird zu einer speziell konstruierten Latte mit 5 Zielmarken und einer gleichen Anzahl von Prismen Zenitwinkel
und Schrägdistanzen bündelweise gemessen (Abb. 5.29). Die gegenseitige Lage der Zielmarken auf der Latte ist durch eine genaue Kalibrierung bestimmt worden. Durch die redundan-te Anzahl der Messgrössen (Überbestimmung) wird die Ge-nauigkeit des Verfahrens gesteigert. Der Einfluss der Refrak-tion auf das Ergebnis ist gegenüber der gegenseitigen Zenit-winkelmessung grösser, wird aber durch kürzere Zielweiten reduziert. Das einfache Sprungstandverfahren ist vom Prin-zip her dasselbe, jedoch werden normale Zielzeichen ver-wendet.
Abb. 5.29 Messanordnung beim erweiterten Sprungstandverfahren
Z1-Z5
ds, 1-ds, 5
1 2
3
4
5
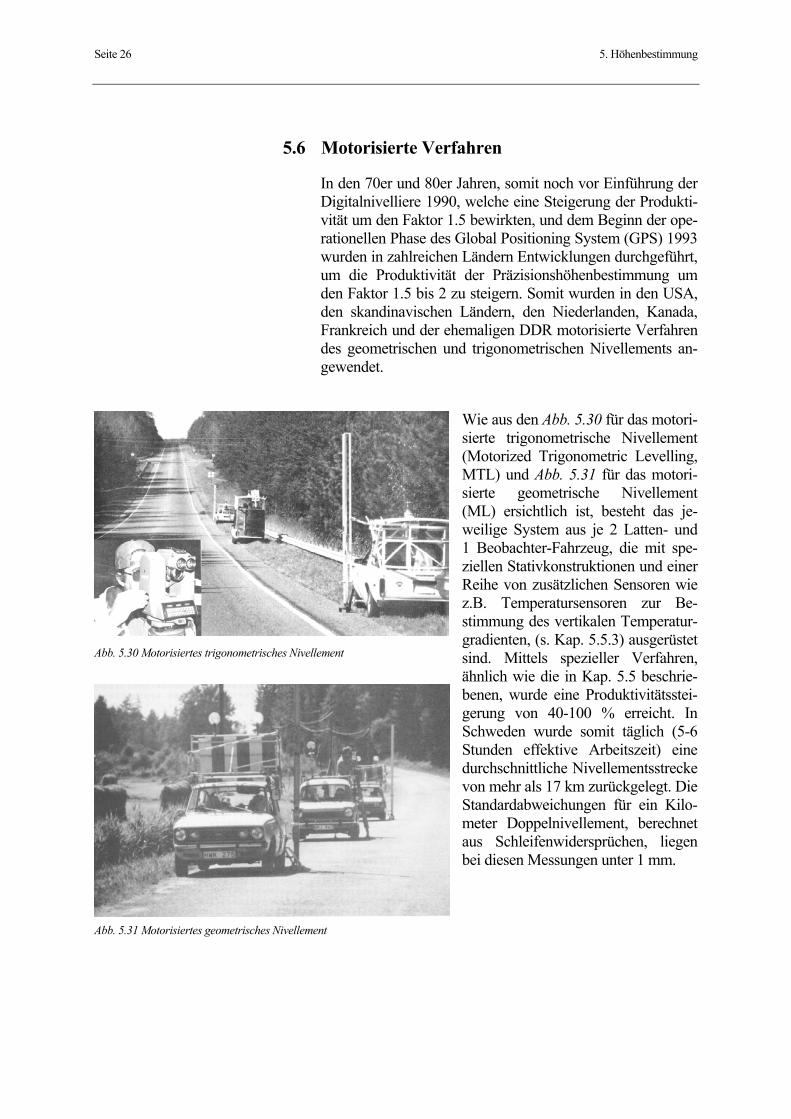
Seite 26 5. Höhenbestimmung
5.6 Motorisierte Verfahren
In den 70er und 80er Jahren, somit noch vor Einführung der Digitalnivelliere 1990, welche eine Steigerung der Produkti-vität um den Faktor 1.5 bewirkten, und dem Beginn der ope-rationellen Phase des Global Positioning System (GPS) 1993 wurden in zahlreichen Ländern Entwicklungen durchgeführt, um die Produktivität der Präzisionshöhenbestimmung um den Faktor 1.5 bis 2 zu steigern. Somit wurden in den USA, den skandinavischen Ländern, den Niederlanden, Kanada, Frankreich und der ehemaligen DDR motorisierte Verfahren des geometrischen und trigonometrischen Nivellements an-gewendet.
Wie aus den Abb. 5.30 für das motori-sierte trigonometrische Nivellement (Motorized Trigonometric Levelling, MTL) und Abb. 5.31 für das motori-sierte geometrische Nivellement (ML) ersichtlich ist, besteht das je-weilige System aus je 2 Latten- und 1 Beobachter-Fahrzeug, die mit spe-ziellen Stativkonstruktionen und einer Reihe von zusätzlichen Sensoren wie z.B. Temperatursensoren zur Be-stimmung des vertikalen Temperatur-gradienten, (s. Kap. 5.5.3) ausgerüstet sind. Mittels spezieller Verfahren, ähnlich wie die in Kap. 5.5 beschrie-benen, wurde eine Produktivitätsstei-gerung von 40-100 % erreicht. In Schweden wurde somit täglich (5-6 Stunden effektive Arbeitszeit) eine durchschnittliche Nivellementsstrecke von mehr als 17 km zurückgelegt. Die Standardabweichungen für ein Kilo-meter Doppelnivellement, berechnet aus Schleifenwidersprüchen, liegen bei diesen Messungen unter 1 mm.
Abb. 5.31 Motorisiertes geometrisches Nivellement
Abb. 5.30 Motorisiertes trigonometrisches Nivellement

5.7 Barometrische Höhenmessung Seite 27
Abschätzungen: Druckabnahme mit der Höhe: 1 mbar / 10 m
Temperaturabnahme mit der Höhe: 1°C / 100 m
Dies gilt lediglich für grosse Höhen.
5.7 Barometrische Höhenmessung
5.7.1 Prinzip
Die barometrische Höhenmessung beruht auf der Bestim-mung des Luftdrucks in verschiedenen Höhen. Aus Druck-differenzen werden Höhendifferenzen abgeleitet.
Der Luftdruck p0 in Meereshöhe (Geoid) entspricht durch-schnittlich dem Druck einer 760 mm hohen Quecksilbersäu-le. Mit zunehmender Höhe nimmt der Druck logarithmisch ab. Der logarithmisch funktionale Zusammenhang ergibt sich aus den Gasgesetzen von Boyle-Mariotte und Gay-Lussac. Der Luftdruck ist ausserdem von der Lufttemperatur, von der Luftfeuchtigkeit und der geographischen Breite abhängig. Gleichzeitig ist der Verlauf des Erdschwerefeldes zu beach-ten.
Beobachtet man auf zwei Stationen mit den unbekannten Höhen H1 und H2 die Barometerwerte B1 und B2, so lässt sich der Höhenunterschied ∆H wie folgt berechnen:
Ergänzt man diese Gleichung mit Korrektionsgliedern, die den funktionalen Zusammenhang mit der Temperatur, Schwerebeschleunigung der Höhenlage, der geographischen Breite und der Luftfeuchte dokumentieren, und durch Ein-setzen von Mittelwerten, so erhält man die vollständige Ba-rometerformel nach Jordan:
p0 1 013 250 [g/cm⋅s2] = angenommener Luftdruck in Meereshöhe (= 1 013.25 hPa)
ρ0 0.001 293 04 [g/cm3] = Dichte der trockenen Luft unter Berücksichti-gung des Kohlensäuregehaltes bei 0°C und Luftdruck in Meereshöhe p0
g045 980.632 [cm/s2] = Schwerebeschleunigung in Meereshöhe unter geo-
graphischer Breite ϕ=45°
δ 0.377 = Verhältnis der Dichte des Wasserdampfes zur Dichte der tro-ckenen Luft bei 0°C und p0
β 0.00264 = von der Abplattung der Erde abhängiger Schwerekoeffizient
R 6 370 000 [m] = Erdradius
α 0.003665 = 1/272.851
∆H H Hp T
gpB
pB
p Tg
BB
= − =+ ⋅
⋅⋅ −
=
+ ⋅⋅
⋅2 10
0
0
2
0
1
0
0
1
2
1 1( )ln ln
( )ln
αρ
αρ
∆Hp
gBB
Tep
HR
m
mm
m=⋅
⋅ ⋅ + ⋅ ⋅ + ⋅
⋅ + ⋅ ⋅ +
0
0 045
1
21 1 1 2 1
2ρ
α δ β ϕln ( ) ( cos )
Gl. 5.7-1
Gl. 5.7-2
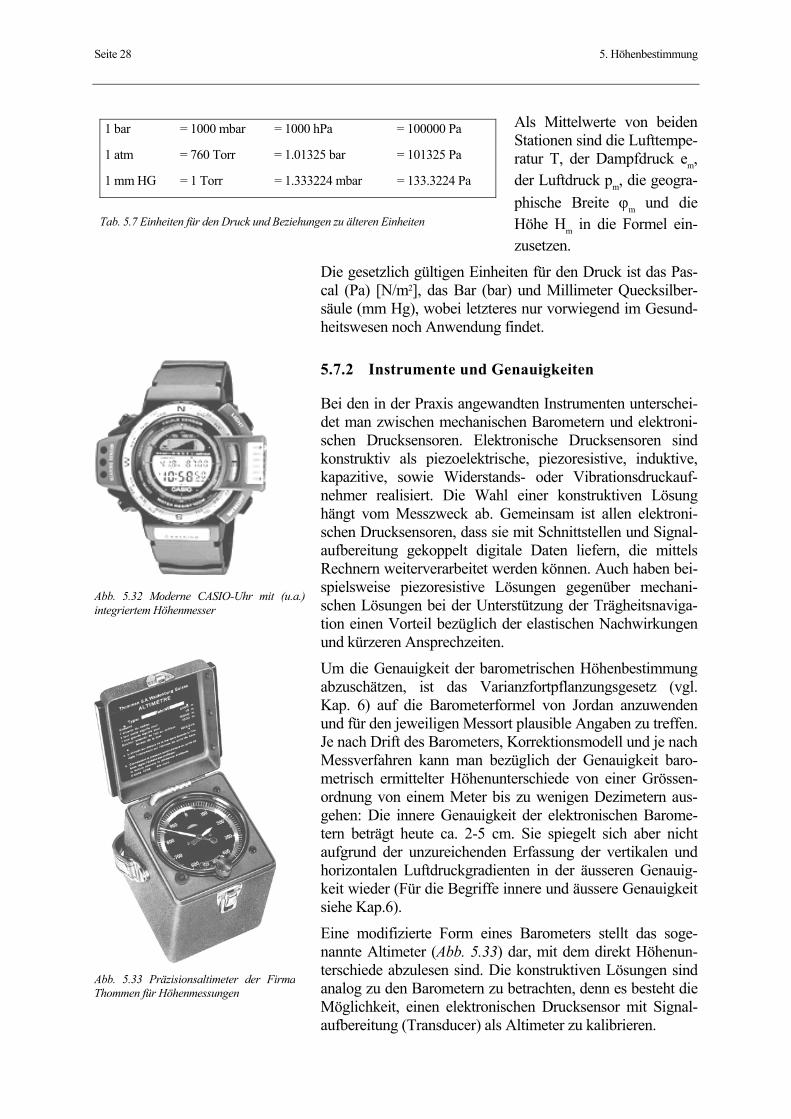
Seite 28 5. Höhenbestimmung
Als Mittelwerte von beiden Stationen sind die Lufttempe-ratur T, der Dampfdruck em, der Luftdruck pm, die geogra-phische Breite ϕm und die Höhe Hm in die Formel ein-zusetzen.
Die gesetzlich gültigen Einheiten für den Druck ist das Pas-cal (Pa) [N/m2], das Bar (bar) und Millimeter Quecksilber-säule (mm Hg), wobei letzteres nur vorwiegend im Gesund-heitswesen noch Anwendung findet.
5.7.2 Instrumente und Genauigkeiten
Bei den in der Praxis angewandten Instrumenten unterschei-det man zwischen mechanischen Barometern und elektroni-schen Drucksensoren. Elektronische Drucksensoren sind konstruktiv als piezoelektrische, piezoresistive, induktive, kapazitive, sowie Widerstands- oder Vibrationsdruckauf-nehmer realisiert. Die Wahl einer konstruktiven Lösung hängt vom Messzweck ab. Gemeinsam ist allen elektroni-schen Drucksensoren, dass sie mit Schnittstellen und Signal-aufbereitung gekoppelt digitale Daten liefern, die mittels Rechnern weiterverarbeitet werden können. Auch haben bei-spielsweise piezoresistive Lösungen gegenüber mechani-schen Lösungen bei der Unterstützung der Trägheitsnaviga-tion einen Vorteil bezüglich der elastischen Nachwirkungen und kürzeren Ansprechzeiten.
Um die Genauigkeit der barometrischen Höhenbestimmung abzuschätzen, ist das Varianzfortpflanzungsgesetz (vgl. Kap. 6) auf die Barometerformel von Jordan anzuwenden und für den jeweiligen Messort plausible Angaben zu treffen. Je nach Drift des Barometers, Korrektionsmodell und je nach Messverfahren kann man bezüglich der Genauigkeit baro-metrisch ermittelter Höhenunterschiede von einer Grössen-ordnung von einem Meter bis zu wenigen Dezimetern aus-gehen: Die innere Genauigkeit der elektronischen Barome-tern beträgt heute ca. 2-5 cm. Sie spiegelt sich aber nicht aufgrund der unzureichenden Erfassung der vertikalen und horizontalen Luftdruckgradienten in der äusseren Genauig-keit wieder (Für die Begriffe innere und äussere Genauigkeit siehe Kap.6).
Eine modifizierte Form eines Barometers stellt das soge-nannte Altimeter (Abb. 5.33) dar, mit dem direkt Höhenun-terschiede abzulesen sind. Die konstruktiven Lösungen sind analog zu den Barometern zu betrachten, denn es besteht die Möglichkeit, einen elektronischen Drucksensor mit Signal-aufbereitung (Transducer) als Altimeter zu kalibrieren.
Abb. 5.32 Moderne CASIO-Uhr mit (u.a.)integriertem Höhenmesser
Abb. 5.33 Präzisionsaltimeter der FirmaThommen für Höhenmessungen
1 bar = 1000 mbar = 1000 hPa = 100000 Pa
1 atm = 760 Torr = 1.01325 bar = 101325 Pa
1 mm HG = 1 Torr = 1.333224 mbar = 133.3224 Pa
Tab. 5.7 Einheiten für den Druck und Beziehungen zu älteren Einheiten
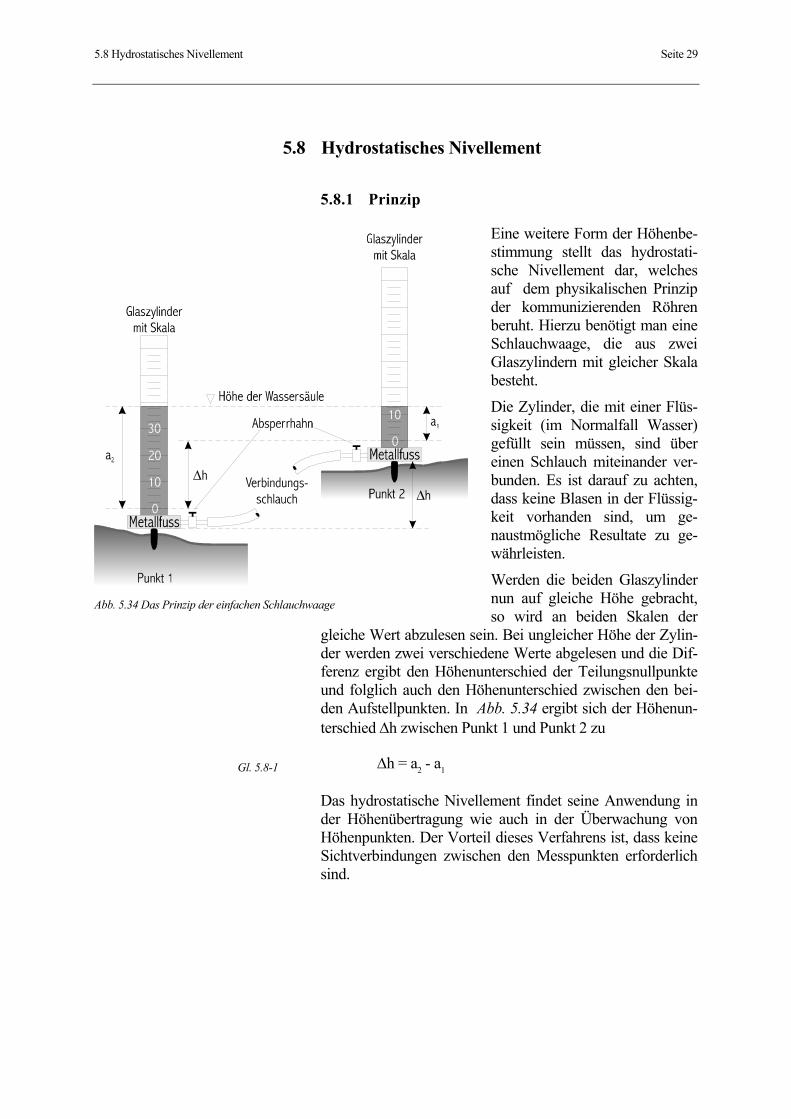
5.8 Hydrostatisches Nivellement Seite 29
5.8 Hydrostatisches Nivellement
5.8.1 Prinzip
Eine weitere Form der Höhenbe-stimmung stellt das hydrostati-sche Nivellement dar, welches auf dem physikalischen Prinzip der kommunizierenden Röhren beruht. Hierzu benötigt man eine Schlauchwaage, die aus zwei Glaszylindern mit gleicher Skala besteht.
Die Zylinder, die mit einer Flüs-sigkeit (im Normalfall Wasser) gefüllt sein müssen, sind über einen Schlauch miteinander ver-bunden. Es ist darauf zu achten, dass keine Blasen in der Flüssig-keit vorhanden sind, um ge-naustmögliche Resultate zu ge-währleisten.
Werden die beiden Glaszylinder nun auf gleiche Höhe gebracht, so wird an beiden Skalen der
gleiche Wert abzulesen sein. Bei ungleicher Höhe der Zylin-der werden zwei verschiedene Werte abgelesen und die Dif-ferenz ergibt den Höhenunterschied der Teilungsnullpunkte und folglich auch den Höhenunterschied zwischen den bei-den Aufstellpunkten. In Abb. 5.34 ergibt sich der Höhenun-terschied ∆h zwischen Punkt 1 und Punkt 2 zu
∆h = a2 - a1
Das hydrostatische Nivellement findet seine Anwendung in der Höhenübertragung wie auch in der Überwachung von Höhenpunkten. Der Vorteil dieses Verfahrens ist, dass keine Sichtverbindungen zwischen den Messpunkten erforderlich sind.
Abb. 5.34 Das Prinzip der einfachen Schlauchwaage
Gl. 5.8-1
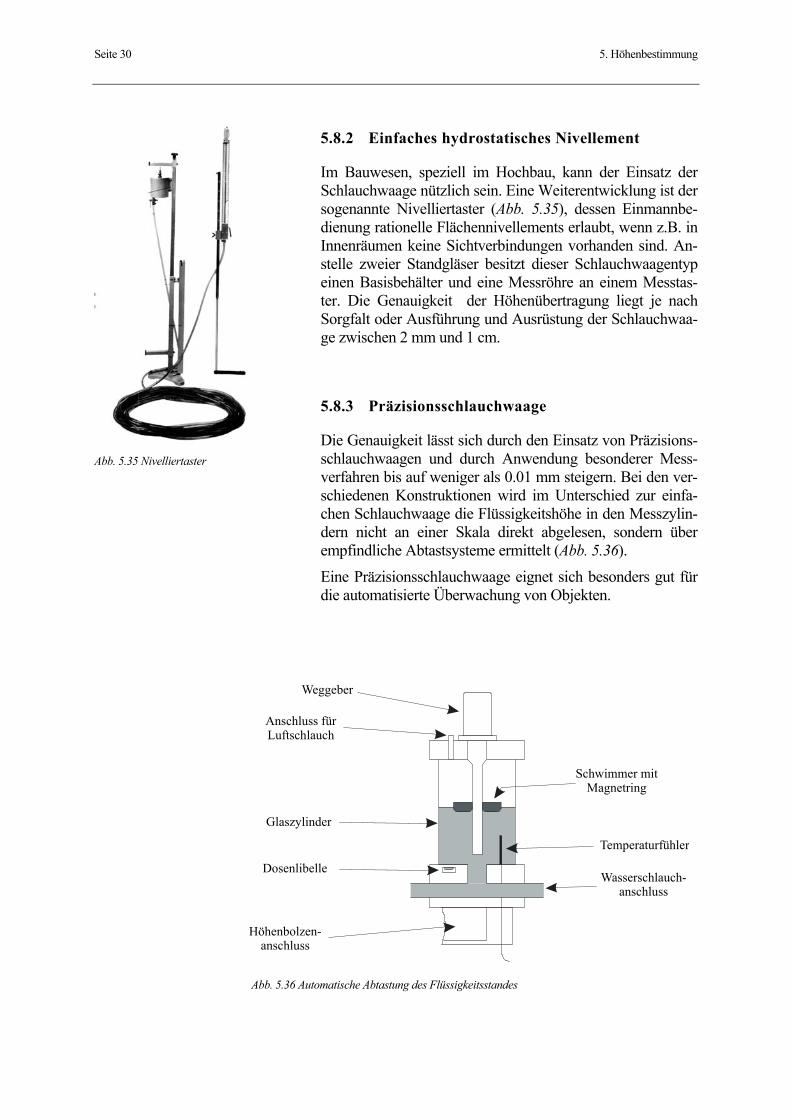
Seite 30 5. Höhenbestimmung
5.8.2 Einfaches hydrostatisches Nivellement
Im Bauwesen, speziell im Hochbau, kann der Einsatz der Schlauchwaage nützlich sein. Eine Weiterentwicklung ist der sogenannte Nivelliertaster (Abb. 5.35), dessen Einmannbe-dienung rationelle Flächennivellements erlaubt, wenn z.B. in Innenräumen keine Sichtverbindungen vorhanden sind. An-stelle zweier Standgläser besitzt dieser Schlauchwaagentyp einen Basisbehälter und eine Messröhre an einem Messtas-ter. Die Genauigkeit der Höhenübertragung liegt je nach Sorgfalt oder Ausführung und Ausrüstung der Schlauchwaa-ge zwischen 2 mm und 1 cm.
5.8.3 Präzisionsschlauchwaage
Die Genauigkeit lässt sich durch den Einsatz von Präzisions-schlauchwaagen und durch Anwendung besonderer Mess-verfahren bis auf weniger als 0.01 mm steigern. Bei den ver-schiedenen Konstruktionen wird im Unterschied zur einfa-chen Schlauchwaage die Flüssigkeitshöhe in den Messzylin-dern nicht an einer Skala direkt abgelesen, sondern über empfindliche Abtastsysteme ermittelt (Abb. 5.36).
Eine Präzisionsschlauchwaage eignet sich besonders gut für die automatisierte Überwachung von Objekten.
Abb. 5.36 Automatische Abtastung des Flüssigkeitsstandes
Schwimmer mitMagnetring
Temperaturfühler
Wasserschlauch-anschluss
Höhenbolzen-anschluss
Dosenlibelle
Glaszylinder
Anschluss fürLuftschlauch
Weggeber
Abb. 5.35 Nivelliertaster
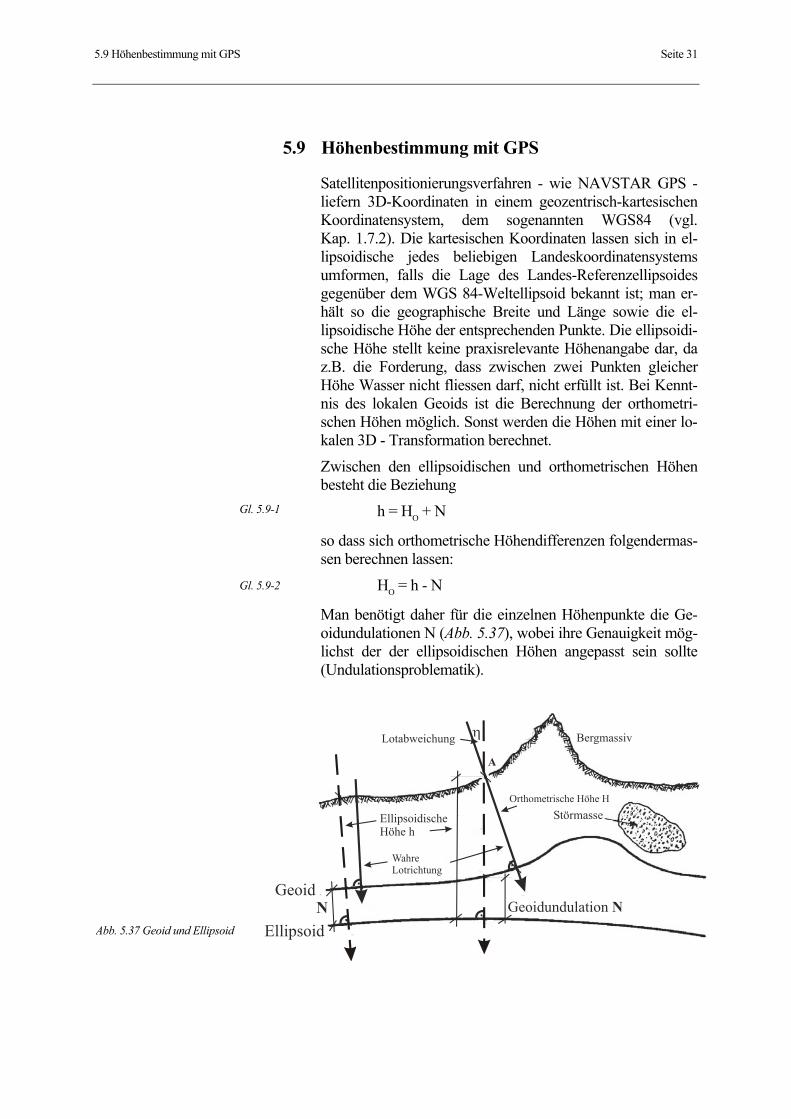
5.9 Höhenbestimmung mit GPS Seite 31
5.9 Höhenbestimmung mit GPS
Satellitenpositionierungsverfahren - wie NAVSTAR GPS - liefern 3D-Koordinaten in einem geozentrisch-kartesischen Koordinatensystem, dem sogenannten WGS84 (vgl. Kap. 1.7.2). Die kartesischen Koordinaten lassen sich in el-lipsoidische jedes beliebigen Landeskoordinatensystems umformen, falls die Lage des Landes-Referenzellipsoides gegenüber dem WGS 84-Weltellipsoid bekannt ist; man er-hält so die geographische Breite und Länge sowie die el-lipsoidische Höhe der entsprechenden Punkte. Die ellipsoidi-sche Höhe stellt keine praxisrelevante Höhenangabe dar, da z.B. die Forderung, dass zwischen zwei Punkten gleicher Höhe Wasser nicht fliessen darf, nicht erfüllt ist. Bei Kennt-nis des lokalen Geoids ist die Berechnung der orthometri-schen Höhen möglich. Sonst werden die Höhen mit einer lo-kalen 3D - Transformation berechnet.
Zwischen den ellipsoidischen und orthometrischen Höhen besteht die Beziehung
h = HO + N
so dass sich orthometrische Höhendifferenzen folgendermas-sen berechnen lassen:
HO = h - N
Man benötigt daher für die einzelnen Höhenpunkte die Ge-oidundulationen N (Abb. 5.37), wobei ihre Genauigkeit mög-lichst der der ellipsoidischen Höhen angepasst sein sollte (Undulationsproblematik).
Gl. 5.9-1
Gl. 5.9-2
Abb. 5.37 Geoid und Ellipsoid
Geoidundulation NGeoid
Ellipsoid
Lotabweichung Bergmassiv
StörmasseOrthometrische Höhe H
Ellipsoidische Höhe h
WahreLotrichtung
N
A
Geoid
η
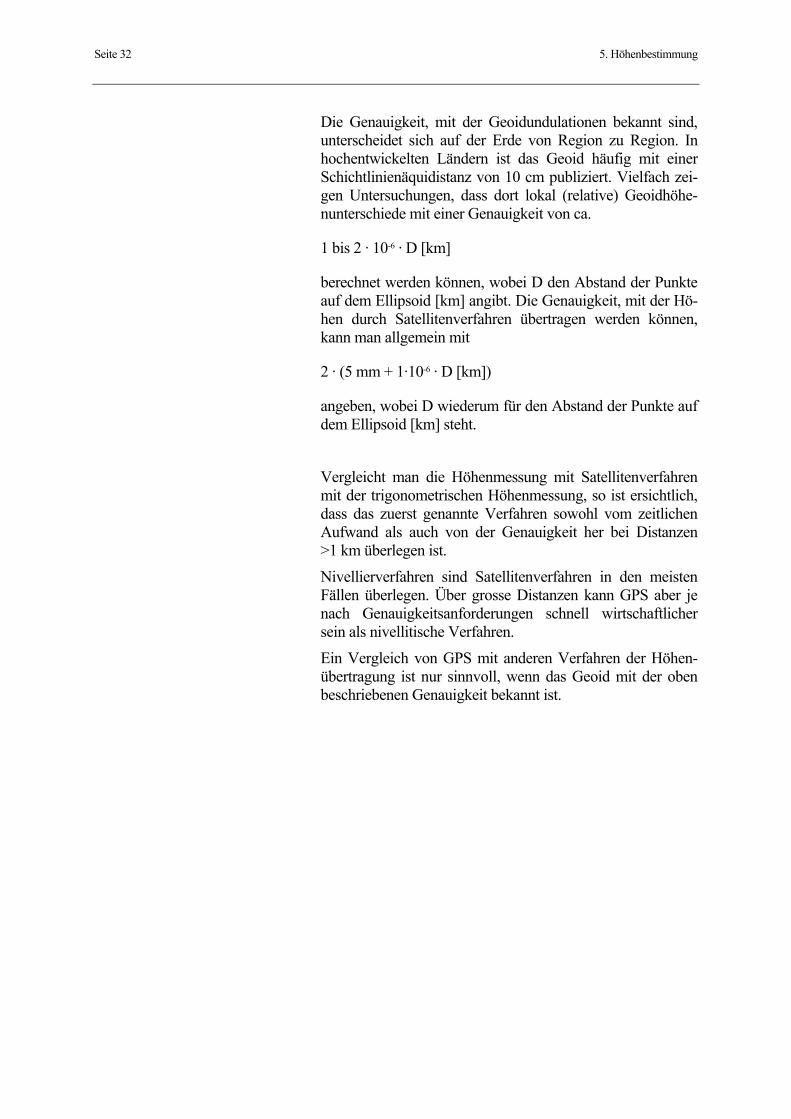
Seite 32 5. Höhenbestimmung
Die Genauigkeit, mit der Geoidundulationen bekannt sind, unterscheidet sich auf der Erde von Region zu Region. In hochentwickelten Ländern ist das Geoid häufig mit einer Schichtlinienäquidistanz von 10 cm publiziert. Vielfach zei-gen Untersuchungen, dass dort lokal (relative) Geoidhöhe-nunterschiede mit einer Genauigkeit von ca.
1 bis 2 · 10-6 · D [km]
berechnet werden können, wobei D den Abstand der Punkte auf dem Ellipsoid [km] angibt. Die Genauigkeit, mit der Hö-hen durch Satellitenverfahren übertragen werden können, kann man allgemein mit
2 · (5 mm + 1·10-6 · D [km])
angeben, wobei D wiederum für den Abstand der Punkte auf dem Ellipsoid [km] steht.
Vergleicht man die Höhenmessung mit Satellitenverfahren mit der trigonometrischen Höhenmessung, so ist ersichtlich, dass das zuerst genannte Verfahren sowohl vom zeitlichen Aufwand als auch von der Genauigkeit her bei Distanzen >1 km überlegen ist.
Nivellierverfahren sind Satellitenverfahren in den meisten Fällen überlegen. Über grosse Distanzen kann GPS aber je nach Genauigkeitsanforderungen schnell wirtschaftlicher sein als nivellitische Verfahren.
Ein Vergleich von GPS mit anderen Verfahren der Höhen-übertragung ist nur sinnvoll, wenn das Geoid mit der oben beschriebenen Genauigkeit bekannt ist.
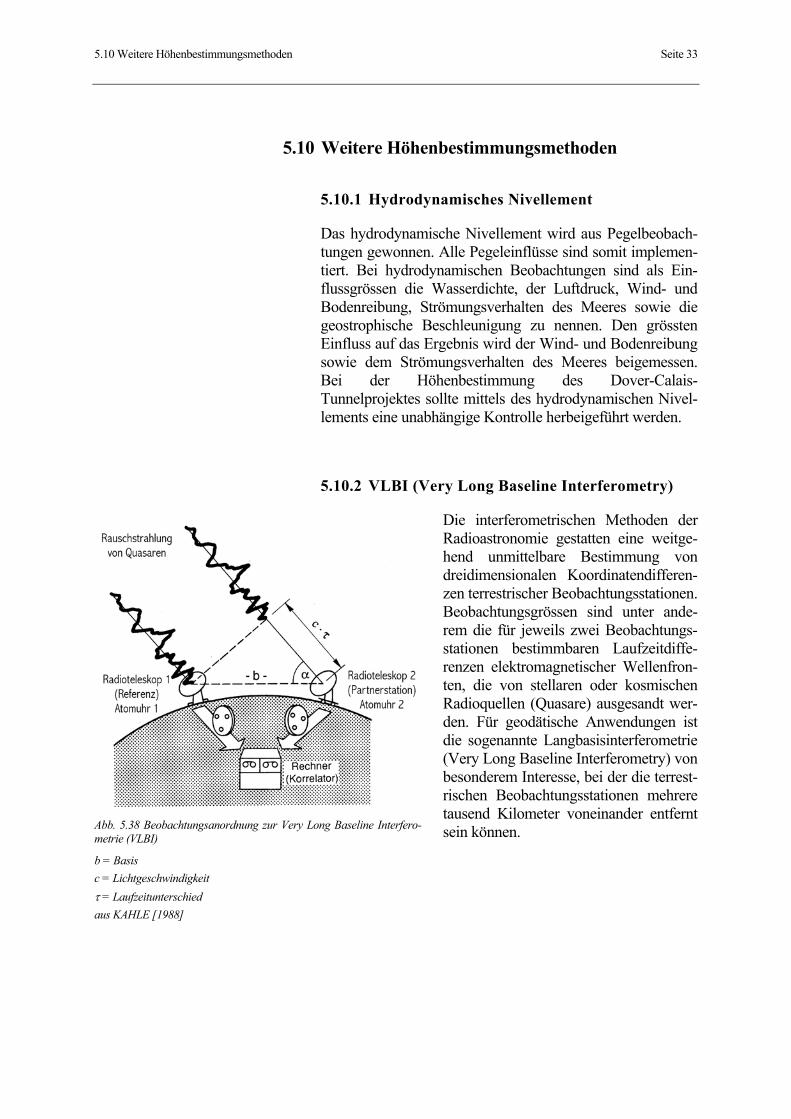
5.10 Weitere Höhenbestimmungsmethoden Seite 33
5.10 Weitere Höhenbestimmungsmethoden
5.10.1 Hydrodynamisches Nivellement
Das hydrodynamische Nivellement wird aus Pegelbeobach-tungen gewonnen. Alle Pegeleinflüsse sind somit implemen-tiert. Bei hydrodynamischen Beobachtungen sind als Ein-flussgrössen die Wasserdichte, der Luftdruck, Wind- und Bodenreibung, Strömungsverhalten des Meeres sowie die geostrophische Beschleunigung zu nennen. Den grössten Einfluss auf das Ergebnis wird der Wind- und Bodenreibung sowie dem Strömungsverhalten des Meeres beigemessen. Bei der Höhenbestimmung des Dover-Calais-Tunnelprojektes sollte mittels des hydrodynamischen Nivel-lements eine unabhängige Kontrolle herbeigeführt werden.
5.10.2 VLBI (Very Long Baseline Interferometry)
Die interferometrischen Methoden der Radioastronomie gestatten eine weitge-hend unmittelbare Bestimmung von dreidimensionalen Koordinatendifferen-zen terrestrischer Beobachtungsstationen. Beobachtungsgrössen sind unter ande-rem die für jeweils zwei Beobachtungs-stationen bestimmbaren Laufzeitdiffe-renzen elektromagnetischer Wellenfron-ten, die von stellaren oder kosmischen Radioquellen (Quasare) ausgesandt wer-den. Für geodätische Anwendungen ist die sogenannte Langbasisinterferometrie (Very Long Baseline Interferometry) von besonderem Interesse, bei der die terrest-rischen Beobachtungsstationen mehrere tausend Kilometer voneinander entfernt sein können. Abb. 5.38 Beobachtungsanordnung zur Very Long Baseline Interfero-
metrie (VLBI)
b = Basis c = Lichtgeschwindigkeit τ = Laufzeitunterschied aus KAHLE [1988]
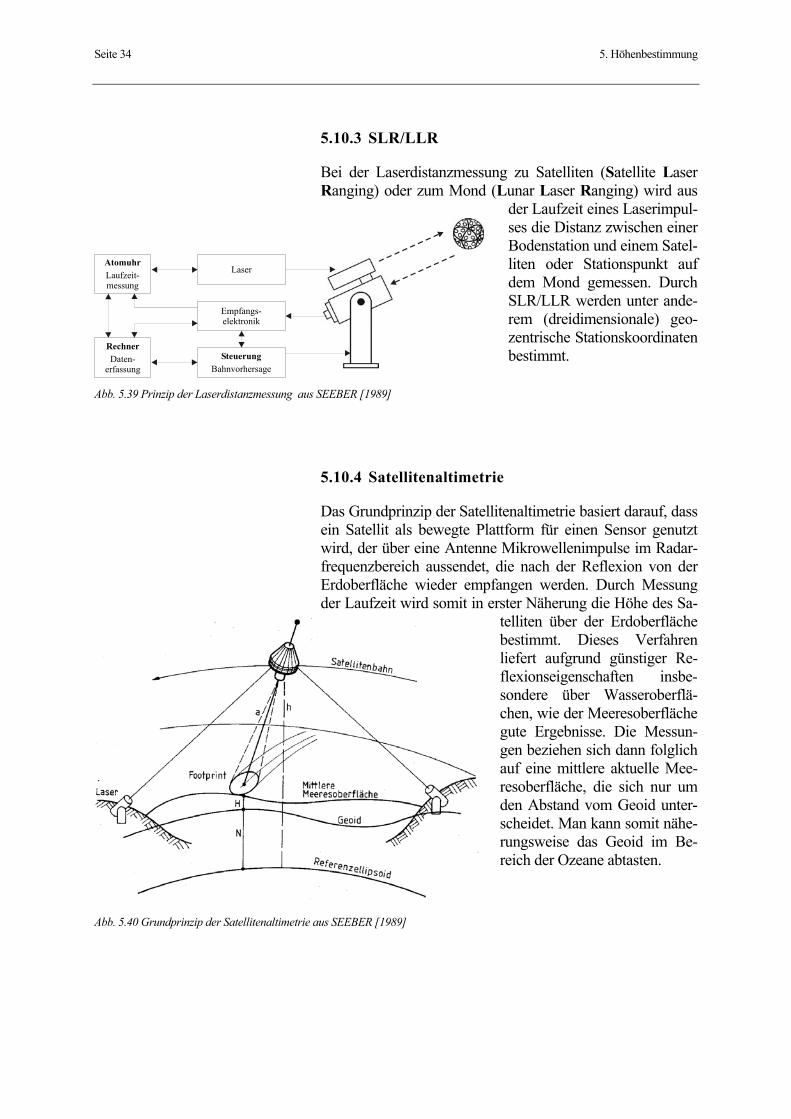
Seite 34 5. Höhenbestimmung
5.10.3 SLR/LLR
Bei der Laserdistanzmessung zu Satelliten (Satellite Laser Ranging) oder zum Mond (Lunar Laser Ranging) wird aus
der Laufzeit eines Laserimpul-ses die Distanz zwischen einer Bodenstation und einem Satel-liten oder Stationspunkt auf dem Mond gemessen. Durch SLR/LLR werden unter ande-rem (dreidimensionale) geo-zentrische Stationskoordinaten bestimmt.
5.10.4 Satellitenaltimetrie
Das Grundprinzip der Satellitenaltimetrie basiert darauf, dass ein Satellit als bewegte Plattform für einen Sensor genutzt wird, der über eine Antenne Mikrowellenimpulse im Radar-frequenzbereich aussendet, die nach der Reflexion von der Erdoberfläche wieder empfangen werden. Durch Messung der Laufzeit wird somit in erster Näherung die Höhe des Sa-
telliten über der Erdoberfläche bestimmt. Dieses Verfahren liefert aufgrund günstiger Re-flexionseigenschaften insbe-sondere über Wasseroberflä-chen, wie der Meeresoberfläche gute Ergebnisse. Die Messun-gen beziehen sich dann folglich auf eine mittlere aktuelle Mee-resoberfläche, die sich nur um den Abstand vom Geoid unter-scheidet. Man kann somit nähe-rungsweise das Geoid im Be-reich der Ozeane abtasten.
Abb. 5.40 Grundprinzip der Satellitenaltimetrie aus SEEBER [1989]
H
Abb. 5.39 Prinzip der Laserdistanzmessung aus SEEBER [1989]
LaserAtomuhrLaufzeit-messung
Empfangs-elektronik
SteuerungBahnvorhersage
RechnerDaten-
erfassung
Inhaltsverzeichnis Seite I
6. Geodätische Statistik
6.1 Aufgabe.......................................................................................................................................1
6.2 Fehlerarten und zufällige Abweichungen ..............................................................................2 6.2.1 Grobe Fehler (gross errors) .........................................................................................................2 6.2.2 Systematische Abweichungen (systematic errors) .....................................................................2 6.2.3 Zufällige Abweichungen (random noise) ...................................................................................3
6.3 Grundlagen ................................................................................................................................4
6.4 Verteilungsfunktionen ..............................................................................................................6 6.4.1 Normalverteilung und Verteilungsfunktion................................................................................6 6.4.2 Schiefe Verteilung.......................................................................................................................7
6.5 Genauigkeitsmasse ....................................................................................................................8 6.5.1 Innere und äussere Genauigkeit, Präzision und Auflösung........................................................8 6.5.2 Varianz.........................................................................................................................................8 6.5.3 Empirische Varianz .....................................................................................................................9 6.5.4 Empirische Standardabweichung..............................................................................................10
6.6 Gewicht .................................................................................................................................... 11
6.7 Korrelation.............................................................................................................................. 13
6.8 Vertrauensintervall (Bereichsschätzung)............................................................................ 14 6.8.1 Zweck und Definition................................................................................................................14 6.8.2 Vertrauensintervall bei normalverteilten Zufallsvariablen.......................................................14 6.8.3 Vertrauensintervalle bei mehreren unbekannten Parametern ..................................................16 6.8.4 Hypothesentest mit Hilfe des Vertrauensintervalls ..................................................................16
6.9 Varianzfortpflanzung ............................................................................................................ 18
6.10 Beschreibung der Punktgenauigkeit.................................................................................... 19 6.10.1 Einfluss zufälliger Abweichungen auf Koordinaten ................................................................19 6.10.2 Beschreibung mittels Konfidenzellipse ....................................................................................20 6.10.3 Beschreibung nach Helmert ......................................................................................................20 6.10.4 Vorgehen bei der a priori Berechnung der Punktgenauigkeit ..................................................21 6.10.5 Grundlagen zur Bestimmung der Konfidenzellipsen ...............................................................21 6.10.6 Graphische Konstruktion von Konfidenzellipsen ....................................................................22
6.11 Zuverlässigkeit und Schutz vor groben Fehlern ................................................................ 26 6.11.1 Grundsätze .................................................................................................................................27
6.12 Einführung in die Ausgleichungsrechnung......................................................................... 28 6.12.1 Herleitung der Schätzwerte der Ausgleichung nach vermittelnden Beobachtungen nach der
Methode der kleinsten Quadrate ...............................................................................................30 6.12.2 Modell der Ausgleichung nach vermittelnden Beobachtungen (Gauss-Markoff Modell)......31 6.12.3 Vorgehen zur Lösung von Aufgaben gemäss des Modells der Ausgleichung nach
vermittelnden Beobachtungen (Gauss-Markoff Modell) .........................................................32
Seite II Inhaltsverzeichnis
6.13 Beispiele zu den Kapiteln....................................................................................................... 37 6.13.1 Distanzmesserkalibrierung mit Interferometer .........................................................................37 6.13.2 Standardabweichung bei Doppelmessungen ............................................................................37 6.13.3 Distanzmessung: empirische Varianz und Standardabweichung ............................................37 6.13.4 Genauigkeitsangaben bei Richtungsmessungen.......................................................................38 6.13.5 Genauigkeitsangaben bei Zenitwinkelmessung .......................................................................39 6.13.6 Genauigkeitsangaben beim Abriss............................................................................................40 6.13.7 Gewichtetes Mittel bei Nivellementsknoten.............................................................................41 6.13.8 Normalverteilung.......................................................................................................................42 6.13.9 Varianzfortpflanzung bei Flächenberechnung..........................................................................42 6.13.10 Varianzfortpflanzung bei trigonometrischer Höhenbestimmung ............................................43 6.13.11 Varianzberechnung beim Sinussatz (Länge einer Seite)..........................................................43 6.13.12 Varianzfortpflanzung am Beispiel der Zielpunktzentrierung...................................................44 6.13.13 Varianzfortpflanzung am Beispiel einer Punktabsteckung ......................................................45 6.13.14 Varianzfortpflanzung beim Polygonzug (allgemein) ...............................................................46 6.13.15 Varianzfortpflanzung beim einseitig angeschlossenen Polygonzug (gestreckt, Polygonseiten
gleich lang) ................................................................................................................................48 6.13.16 Varianzfortpflanzung am Beispiel der 2. Hauptaufgabe..........................................................51 6.13.17 Genauigkeit einer dreidimensionalen Punktbestimmung.........................................................54 6.13.18 Graphische Konstruktion von Konfidenzellipsen ....................................................................58 6.13.19 Gauss-Markoff-Ausgleichung und Hypothesentest am Beispiel der Additionskonstanten-
Bestimmung...............................................................................................................................64
6.14 Neue und alte Begriffsbildung in der geodätischen Statistik ............................................ 68
6.15 Toleranzen im Bauwesen....................................................................................................... 69
6.16 Zusammenfassung der wichtigsten statistischen Formeln in der GMT.......................... 71 6.16.1 Bezeichnungen...........................................................................................................................71 6.16.2 Mittelwerte.................................................................................................................................71 6.16.3 Streuungsmasse .........................................................................................................................71
6.16.3.1 Eindimensionale Verteilungen...........................................................................................71 6.16.3.2 Zweidimensionale Verteilungen........................................................................................72 6.16.3.3 Varianzfortpflanzung..........................................................................................................72
6.16.4 Anwendungen............................................................................................................................72 6.16.4.1 Genauigkeitsangaben bei Richtungsmessungen................................................................72 6.16.4.2 Genauigkeitsangaben bei Zenitwinkelmessungen ............................................................73 6.16.4.3 Genauigkeitsangaben beim Abriss.....................................................................................73 6.16.4.4 Varianzfortpflanzung beim Polygonzug............................................................................73
Zusammenstellung der wichtigsten Formelzeichen Seite III
Zusammenstellung der wichtigsten Formelzeichen
A Koeffizientenmatrix
d Differenz der Doppelbeobachtungen
D Distanz
f Freiheitsgrad (Anzahl überschüssiger Messungen)
f(x) Wahrscheinlichkeitsdichtefunktion
F(x) Wahrscheinlichkeitsfunktion
H0, H1 Null- bzw. Alternativhypothese
K(l) Kovarianzmatrix der Beobachtungen
K(x) Kovarianzmatrix der ausgeglichenen Beobachtungen
l Beobachtungsvektor (Messwerte)
l Ausgeglichene Beobachtungen
N Anzahl Richtungen pro Satz
n Anzahl Messungen
P Gewichtsmatrix
p Gewicht
P(x) Wahrscheinlichkeit, dass Ereignis x eintritt
r Korrelationskoeffizient
s empirische Standardabweichung
s02 Varianz der Gewichtseinheit a posteriori
sX,Y Kovarianz
T Toleranz
TO Obere Grenze des Vertrauensintervalls
TU Untere Grenze des Vertrauensintervalls
tα/2,f Wert der beidseitigen t-Verteilung zu einem bestimmten Freiheitsgrad bei einer Irrtumswahrscheinlichkeit α
u Anzahl Unbekannte
uα/2 Wert der Standardnormalverteilung bei einer Irrtumswahrscheinlichkeit α
v Verbesserung (Residuum)
VG Vertrauensgrenzen
VI Vertrauensintervall
x Mittelwert, ausgeglichene Parameter
xw wahrer Wert
α Wahrscheinlichkeit für Fehler 1. Art
Seite IV Zusammenstellung der wichtigsten Formelzeichen
β Wahrscheinlichkeit für Fehler 2. Art
δ Bias, Abweichung des wahren Wertes vom Erwartungswert
ε wahre Abweichung
µ Erwartungswert
σ2 Varianz
σR Standardabweichung einer Richtungsmessung
σα Standardabweichung eines Winkels
σq,A Standardabweichung quer (senkrecht) zur Richtung A
6.1 Aufgabe Seite 1
6. Geodätische Statistik
Stichwörter: arithmetisches Mittel, Auflösung, Ausglei-chung, Bias, Dichtefunktion, empirische Varianz, Erwar-tungswert, Gauss-Markoff Modell, Gewicht, Grobe Fehler, innere und äussere Genauigkeit, Konfidenzband, Konfidenz-ellipse, Korrelation, Median, Normalverteilung, random noi-se, standardisierte Normalverteilung, precision and accuracy, Standardabweichung, systematische Abweichungen, Tole-ranzen, Toleranzketten, Varianz, Varianzfortpflanzung, Ver-besserung (Residuum), Verteilungsfunktion, Vertrauensin-tervall, wahre Abweichungen, wahrer Wert, zentrale Mo-mente, zufällige Abweichungen Zusammenfassung: Im folgenden Kapitel soll eine Einfüh-rung in die Grundzüge der geodätischen Statistik gegeben werden. Aufbauend auf statistischen Grundlagen werden die Grundzüge der geodätischen Ausgleichungsrechnung vorge-stellt, die anhand von Beispielen erläutert werden.
6.1 Aufgabe
Geodätische Messungen werden nach verlangter Genauigkeit und Zuverlässigkeit ausgeführt. Mit Hilfe der Statistik wer-den die Messungen gegenüber Irrtümern gesichert und Ge-nauigkeitsmasse bestimmt. Fehlerfreie Messungen sind nicht möglich, weil teilweise nicht alle äusseren und inneren Ein-flüsse eines Messprozesses erfasst werden können (z.B. Temperaturunterschiede bei der elektronischen Distanzmes-sung, Erfassung der meteorologischen Parameter, elektroni-sches Rauschen von Instrumentenkomponenten), sowie auf-grund der Unvollkommenheit der menschlichen Sinne und der Messverfahren. Zur Beurteilung der Genauigkeit und zur Vermeidung von Fehlern werden Messungen wiederholt (z.B. Sätze bei der Richtungsmessung) und zur Kontrolle grundsätzlich mehr Beobachtungen durchgeführt, als Unbe-kannte vorhanden sind (Überbestimmung). Aufgrund der Messwerte werden folgende statistischen Grössen bestimmt:
− Plausibler Wert der gesuchten Grösse (z.B. Mittelwert)
− Streuung oder Standardabweichung
− Genauigkeit und Vertrauensintervall
Die Unsicherheit der Grössen wird dabei durch Überbe-stimmung bestimmt. Die Messungen sind möglichst unab-hängig (unkorreliert) voneinander durchzuführen (also nicht einfach mehrmals den gleichen Wert ablesen!)
Seite 2 6. Geodätische Statistik
6.2 Fehlerarten und zufällige Abweichungen
In der Geodäsie unterscheidet man zwischen groben Fehlern, systematischen und zufälligen Abweichungen.
6.2.1 Grobe Fehler (gross errors)
Grobe Fehler sind im Sinne von falsch zu verstehen. Es liegt also entweder ein Irrtum oder die Wahl eines falschen Mo-dells zugrunde.
Ursachen
− Irrtümer der Beobachter (Verwechslung, falsche Able-sung, etc.)
− Ungeeignetes Mess- und Auswerteverfahren Vermeidung Jedes Messelement muss durch die Anordnung kontrolliert sein.
− Unabhängige Kontrollmessungen − Proben − Andere Konfiguration − Mehrfachmessungen
6.2.2 Systematische Abweichungen (systematic er-rors)
Unter systematischen Abweichungen versteht man die funk-tionale Komponente der Abweichung. Es handelt sich hier-bei um Modellfehler, deren Systematik sich in einem be-stimmten Betrag und bestimmten Vorzeichen darlegt.
Merke: Der antiquierte Begriff "Fehler" in der Geodäsie wird in diesemKapitel nicht verwendet. Der Begriff "Fehler" ist im Hinblick auf interdiszi-plinäre Diskussionen nur dann zu verwenden, wenn er im Sinne von falsch zuverstehen ist.
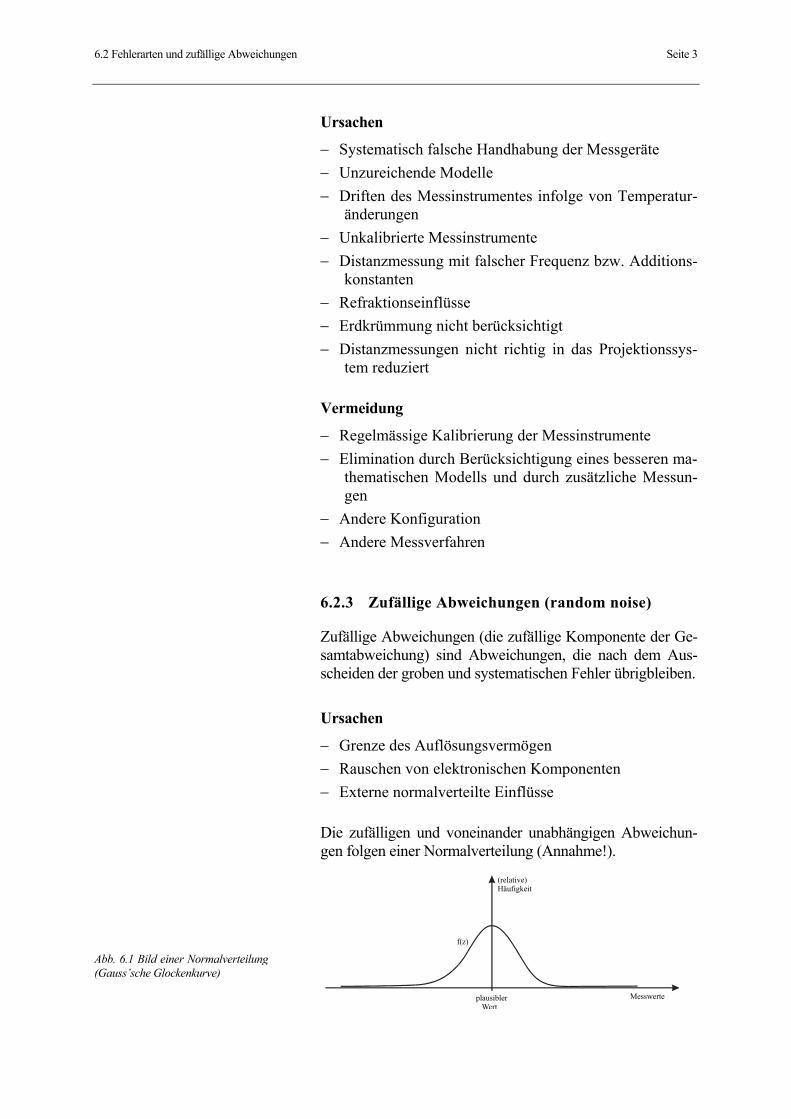
6.2 Fehlerarten und zufällige Abweichungen Seite 3
Ursachen
− Systematisch falsche Handhabung der Messgeräte − Unzureichende Modelle − Driften des Messinstrumentes infolge von Temperatur-
änderungen − Unkalibrierte Messinstrumente − Distanzmessung mit falscher Frequenz bzw. Additions-
konstanten − Refraktionseinflüsse − Erdkrümmung nicht berücksichtigt − Distanzmessungen nicht richtig in das Projektionssys-
tem reduziert Vermeidung
− Regelmässige Kalibrierung der Messinstrumente − Elimination durch Berücksichtigung eines besseren ma-
thematischen Modells und durch zusätzliche Messun-gen
− Andere Konfiguration − Andere Messverfahren
6.2.3 Zufällige Abweichungen (random noise)
Zufällige Abweichungen (die zufällige Komponente der Ge-samtabweichung) sind Abweichungen, die nach dem Aus-scheiden der groben und systematischen Fehler übrigbleiben.
Ursachen
− Grenze des Auflösungsvermögen − Rauschen von elektronischen Komponenten − Externe normalverteilte Einflüsse Die zufälligen und voneinander unabhängigen Abweichun-gen folgen einer Normalverteilung (Annahme!).
(relative)Häufigkeit
MesswerteplausiblerWert
f(z)
Abb. 6.1 Bild einer Normalverteilung(Gauss’sche Glockenkurve)
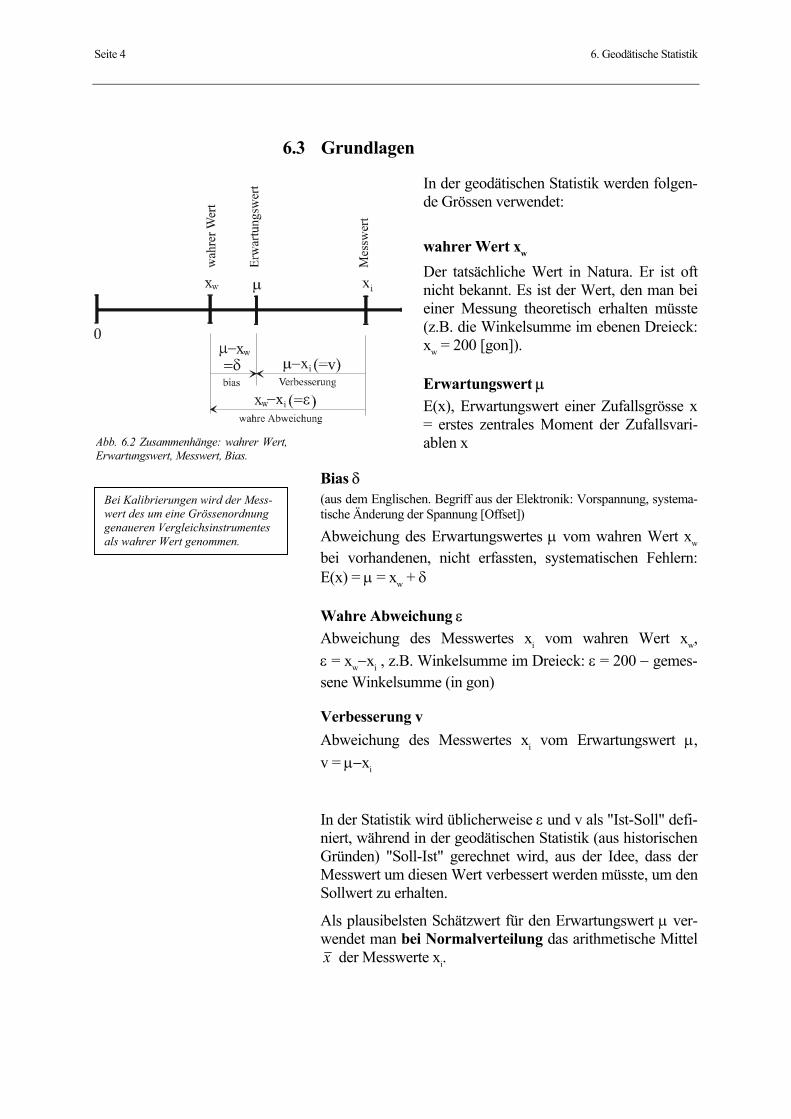
Seite 4 6. Geodätische Statistik
6.3 Grundlagen
In der geodätischen Statistik werden folgen-de Grössen verwendet:
wahrer Wert xw Der tatsächliche Wert in Natura. Er ist oft nicht bekannt. Es ist der Wert, den man bei einer Messung theoretisch erhalten müsste (z.B. die Winkelsumme im ebenen Dreieck: xw = 200 [gon]).
Erwartungswert µ E(x), Erwartungswert einer Zufallsgrösse x = erstes zentrales Moment der Zufallsvari-ablen x
Bias δ (aus dem Englischen. Begriff aus der Elektronik: Vorspannung, systema-tische Änderung der Spannung [Offset]) Abweichung des Erwartungswertes µ vom wahren Wert xw bei vorhandenen, nicht erfassten, systematischen Fehlern: E(x) = µ = xw + δ
Wahre Abweichung ε Abweichung des Messwertes xi vom wahren Wert xw, ε = xw−xi , z.B. Winkelsumme im Dreieck: ε = 200 − gemes-sene Winkelsumme (in gon)
Verbesserung v Abweichung des Messwertes xi vom Erwartungswert µ, v = µ−xi
In der Statistik wird üblicherweise ε und v als "Ist-Soll" defi-niert, während in der geodätischen Statistik (aus historischen Gründen) "Soll-Ist" gerechnet wird, aus der Idee, dass der Messwert um diesen Wert verbessert werden müsste, um den Sollwert zu erhalten.
Als plausibelsten Schätzwert für den Erwartungswert µ ver-wendet man bei Normalverteilung das arithmetische Mittel x der Messwerte xi.
Abb. 6.2 Zusammenhänge: wahrer Wert,Erwartungswert, Messwert, Bias.
Bei Kalibrierungen wird der Mess-wert des um eine Grössenordnung genaueren Vergleichsinstrumentes als wahrer Wert genommen.

6.3 Grundlagen Seite 5
arithmetisches Mittel
Sind die Abweichungen jedoch nicht normalverteilt, z.B. durch Überlagerung von Fehlern, so benutzt man den Medi-an x~ . Der Median ist ein robuster Schätzwert. Bei der Me-dianbildung werden die Werte vom kleinsten zum grössten aufsteigend geordnet.
Der Median ist der Wert in der Mitte dieser geordneten Zah-lenreihe. Bei einer geraden Anzahl Werte wird der Durch-schnitt der beiden mittleren Werte verwendet.
]2/)1[(~
+= nxx falls n ungerade
)(21~
]1)2/[(]2/[ ++= nn xxx falls n gerade
n: Anzahl Beobachtungen
µ = =∑=x
x
ni
i
n
1Gl. 6.3-1
Gl. 6.3-2
Gl. 6.3-3
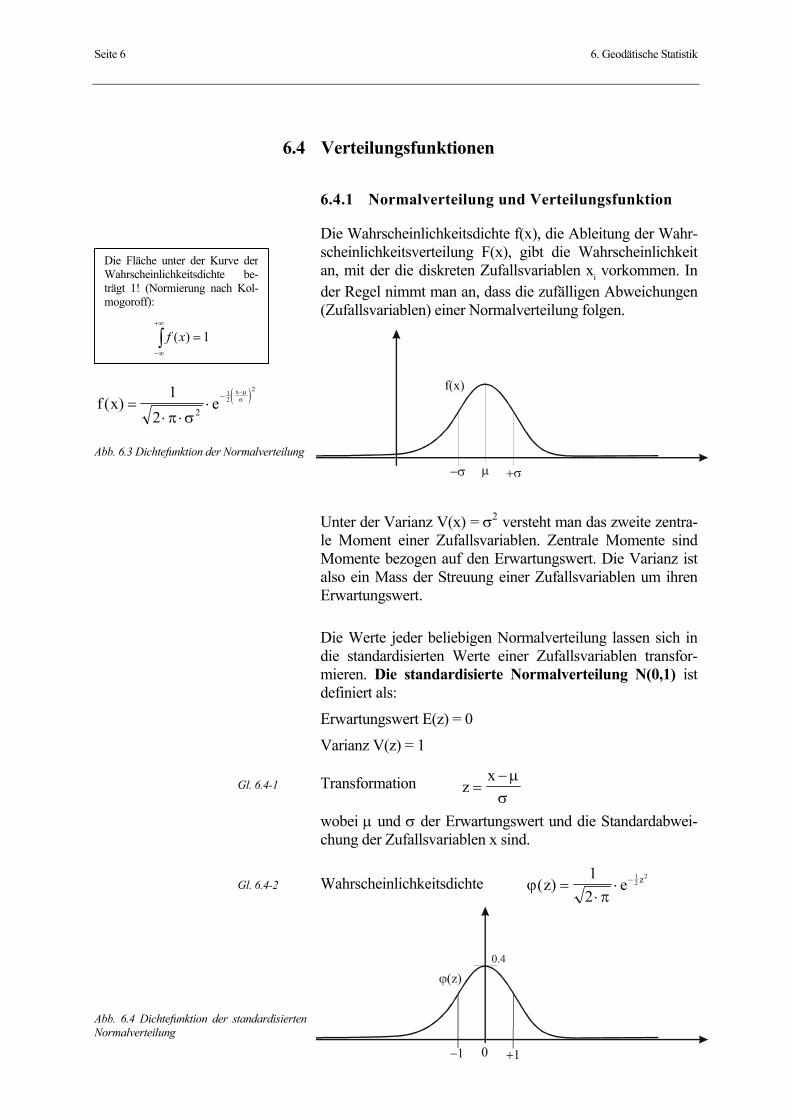
Seite 6 6. Geodätische Statistik
6.4 Verteilungsfunktionen
6.4.1 Normalverteilung und Verteilungsfunktion
Die Wahrscheinlichkeitsdichte f(x), die Ableitung der Wahr-scheinlichkeitsverteilung F(x), gibt die Wahrscheinlichkeit an, mit der die diskreten Zufallsvariablen xi vorkommen. In der Regel nimmt man an, dass die zufälligen Abweichungen (Zufallsvariablen) einer Normalverteilung folgen.
Unter der Varianz V(x) = σ2 versteht man das zweite zentra-le Moment einer Zufallsvariablen. Zentrale Momente sind Momente bezogen auf den Erwartungswert. Die Varianz ist also ein Mass der Streuung einer Zufallsvariablen um ihren Erwartungswert.
Die Werte jeder beliebigen Normalverteilung lassen sich in die standardisierten Werte einer Zufallsvariablen transfor-mieren. Die standardisierte Normalverteilung N(0,1) ist definiert als:
Erwartungswert E(z) = 0
Varianz V(z) = 1 Transformation wobei µ und σ der Erwartungswert und die Standardabwei-chung der Zufallsvariablen x sind.
Wahrscheinlichkeitsdichte
Abb. 6.3 Dichtefunktion der Normalverteilung
( )f x ex
( ) =⋅ ⋅
⋅ − −12 2
12
2
π σ
µσ
Die Fläche unter der Kurve derWahrscheinlichkeitsdichte be-trägt 1! (Normierung nach Kol-mogoroff):
∫+∞
∞−
= 1)(xf
ϕπ
( )z e z=⋅
⋅ −12
12
2Gl. 6.4-2
Abb. 6.4 Dichtefunktion der standardisiertenNormalverteilung
zx
=− µσ
Gl. 6.4-1
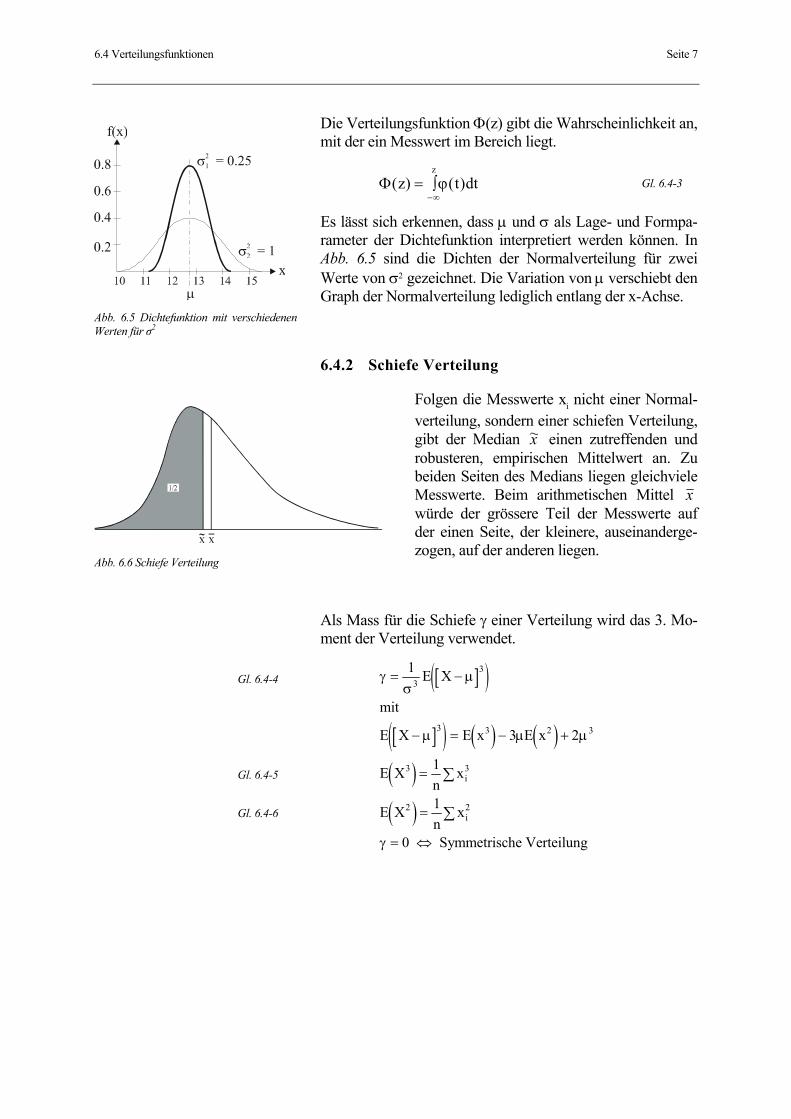
6.4 Verteilungsfunktionen Seite 7
Die Verteilungsfunktion Φ(z) gibt die Wahrscheinlichkeit an, mit der ein Messwert im Bereich liegt.
Es lässt sich erkennen, dass µ und σ als Lage- und Formpa-rameter der Dichtefunktion interpretiert werden können. In Abb. 6.5 sind die Dichten der Normalverteilung für zwei Werte von σ2 gezeichnet. Die Variation von µ verschiebt den Graph der Normalverteilung lediglich entlang der x-Achse.
6.4.2 Schiefe Verteilung
Folgen die Messwerte xi nicht einer Normal-verteilung, sondern einer schiefen Verteilung, gibt der Median x~ einen zutreffenden und robusteren, empirischen Mittelwert an. Zu beiden Seiten des Medians liegen gleichviele Messwerte. Beim arithmetischen Mittel x würde der grössere Teil der Messwerte auf der einen Seite, der kleinere, auseinanderge-zogen, auf der anderen liegen.
Als Mass für die Schiefe γ einer Verteilung wird das 3. Mo-ment der Verteilung verwendet.
Φ( ) ( )z t dtz
= ∫−∞
ϕ
Abb. 6.5 Dichtefunktion mit verschiedenenWerten für σ2
Gl. 6.4-3
Abb. 6.6 Schiefe Verteilung
[ ]( )
[ ]( ) ( ) ( )( )( )
γσ
µ
µ µ µ
γ
= −
− = − +
=
=
= ⇔
∑
∑
1
3 2
1
1
0
33
3 3 2 3
3 3
2 2
E X
E x E x
E Xn
x
E Xn
x
i
i
mit
E X
Symmetrische Verteilung
Gl. 6.4-4
Gl. 6.4-5
Gl. 6.4-6
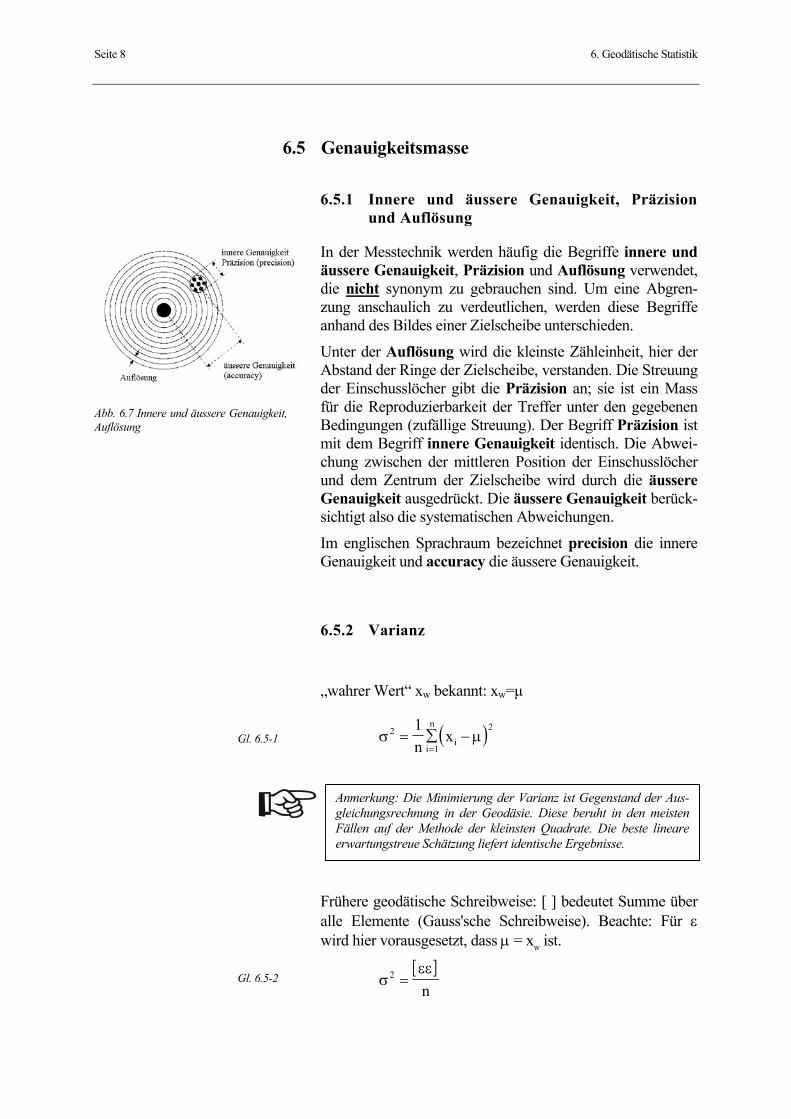
Seite 8 6. Geodätische Statistik
6.5 Genauigkeitsmasse
6.5.1 Innere und äussere Genauigkeit, Präzision und Auflösung
In der Messtechnik werden häufig die Begriffe innere und äussere Genauigkeit, Präzision und Auflösung verwendet, die nicht synonym zu gebrauchen sind. Um eine Abgren-zung anschaulich zu verdeutlichen, werden diese Begriffe anhand des Bildes einer Zielscheibe unterschieden.
Unter der Auflösung wird die kleinste Zähleinheit, hier der Abstand der Ringe der Zielscheibe, verstanden. Die Streuung der Einschusslöcher gibt die Präzision an; sie ist ein Mass für die Reproduzierbarkeit der Treffer unter den gegebenen Bedingungen (zufällige Streuung). Der Begriff Präzision ist mit dem Begriff innere Genauigkeit identisch. Die Abwei-chung zwischen der mittleren Position der Einschusslöcher und dem Zentrum der Zielscheibe wird durch die äussere Genauigkeit ausgedrückt. Die äussere Genauigkeit berück-sichtigt also die systematischen Abweichungen.
Im englischen Sprachraum bezeichnet precision die innere Genauigkeit und accuracy die äussere Genauigkeit.
6.5.2 Varianz
„wahrer Wert“ xw bekannt: xw=µ
Frühere geodätische Schreibweise: [ ] bedeutet Summe über alle Elemente (Gauss'sche Schreibweise). Beachte: Für ε wird hier vorausgesetzt, dass µ = xw ist.
Abb. 6.7 Innere und äussere Genauigkeit,Auflösung
( )σ µ2 2
1
1= −∑
=nxi
i
n
[ ]σ
εε2 =n
Gl. 6.5-1
Gl. 6.5-2
Anmerkung: Die Minimierung der Varianz ist Gegenstand der Aus-gleichungsrechnung in der Geodäsie. Diese beruht in den meistenFällen auf der Methode der kleinsten Quadrate. Die beste lineareerwartungstreue Schätzung liefert identische Ergebnisse.
6.5 Genauigkeitsmasse Seite 9
Spezialfall: "Doppelbeobachtungen" Wird jeder Messwert unabhängig vom anderen mit gleicher Genauigkeit doppelt gemessen, kann die Standardabwei-chung aus den Differenzen d der Doppelbeobachtungen er-mittelt werden (z.B. Doppelnivellement). Der wahre Wert der Differenz ist bekannt. Er ist Null.
Somit ergibt sich die Standardabweichung einer einzelnen Beobachtung aus Doppelbeobachtungen zu
und aus dem Varianzfortpflanzungsgesetz (siehe Kap. 6.9) die Standardabweichung des Mittels zweier Beobachtungen
6.5.3 Empirische Varianz
Die empirische Varianz entspricht der Varianz in der Wahr-scheinlichkeitsrechnung, aber µ ist nicht bekannt und muss geschätzt werden (deskriptive Statistik), durch Bildung des arithmetischen Mittels x . Unter "schätzen" versteht man die Berechnung des plausibelsten Wertes (Erwartungswert)
Freiheitsgrad f = n−u: Anzahl der n Messungen abzüglich der u Unbekannten. Für das arithmetische Mittel ist u = 1.
σ =∑ dd
n2
σσ
xddn
= = ⋅∑
212
( )s
x x
n u
ii
n
2
2
=−
−
∑
[ ]svv
n u2 =
−
Gl. 6.5-3
Gl. 6.5-4
Gl. 6.5-5

Seite 10 6. Geodätische Statistik
6.5.4 Empirische Standardabweichung
Standardabweichung einer einzelnen Beobachtung
Wobei die erste Form von Gl.6.5-7 die numerisch stabilste Formel darstellt, da die Stellenauslöschung am geringsten ist.
Unter Anwendung des Varianzfortpflanzungsgesetzes folgt die Standardabweichung des arithmetischen Mittels
s s= + 2
( )
sn
xn
x
nx x
vvn
ii
n
ii
n
ii
n
=−
⋅ ∑ − ⋅ ∑
=−
⋅ −∑
=∑
−
= =
=
11
1
11
1
2
1 1
2
1
2
( )ssn
vvn nx = =
∑⋅ −1
Gl. 6.5-6
Gl. 6.5-7
Gl. 6.5-8
Eine übertriebene Anzahl von Stellen ist bei der Angabe von empirischen Standardabweichungen nicht sinnvoll. Im Allgemeinen genügen zwei signifikante Ziffern!
6.6 Gewicht Seite 11
6.6 Gewicht
Werden Messungen von verschiedener Genauigkeit mitein-ander verknüpft, so sind die Messungen zu gewichten. Man benutzt dazu Gewichte als Verhältniszahlen, so dass mittels der allgemeinen Gewichtsdefinition folgt
Die Gewichte pi verhalten sich umgekehrt proportional zur Streuung (Varianz) der jeweiligen Beobachtungsgrösse.
Dabei wird “const.” im allgemeinen so gewählt, dass eine Beobachtungsgrösse das Gewicht 1 hat (siehe Gl.6.6-1). So-mit ist s0
2 die Varianz der Gewichtseinheit (d.h. Varianz einer Messung mit Gewicht 1)
Unter dem Einbezug von Gewichten ergibt sich das gewich-tete empirische Mittel (Gl.6.6-3), das auch in der Literatur als allgemeines arithmetisches Mittel bezeichnet wird.
Bei der Einführung der Gewichte wählt man verschiedene Ansätze, die hier nur exemplarisch gezeigt werden sollen.
Werden mehrere, gleichgenaue Beobachtungen aus je einer unterschiedlichen Anzahl Messungen miteinander verknüpft, wird p proportional zur Anzahl Messungen verteilt
p = n
Bei der Distanzmessung, wo die Genauigkeit der Messungen a priori übereinstimmt, wird das Gewicht umgekehrt propor-tional zur Distanz D verteilt
(dies gilt z.B. beim geometrischen Nivellement)
(dies gilt für das trigonometrische Nivellement)
Wenn die Varianz bekannt ist
p s p s p s si i1 12
2 22 2
021⋅ = ⋅ = = ⋅ = ⋅...
pconst
sii
=.
2
xp xpi i
i
=∑∑
pD
=1
pD
=1
2
pii
=1
2σ
Gl. 6.6-1
Gl. 6.6-2
Gl. 6.6-3
Gl. 6.6-4
Gl. 6.6-5
Gl. 6.6-6
Gl. 6.6-7
Seite 12 6. Geodätische Statistik
Somit lässt sich die Standardabweichung, die das Gewicht 1 hat, unter Berücksichtigung von Gewichten wie folgt be-rechnen
bzw. mit der sogenannten "Taschenrechnerformel"
Die Standardabweichung s0 mit dem Gewicht 1 wird als Standardabweichung der Gewichtseinheit bezeichnet.
Unter der Verwendung von s0 folgt für die Standardabwei-chung einer Beobachtung mit dem Gewicht pi
und für die Standardabweichung des gewichteten Mittels (Allgemeines arithmetisches Mittel)
Doppelbeobachtungen
Analog zu Gl.6.5-3 folgt im Falle von Doppelbeobachtungen die Standardabweichung der Gewichtseinheit
und somit die Standardabweichung einer Beobachtung mit dem Gewicht pi
und schliesslich die Standardabweichung des Mittels von zwei Beobachtungen vom Gewicht p = 1
spvv
n0 1=
∑−
( )s
p xp x
pn
i ii i
i0
2
2
1=
⋅ −⋅∑
∑∑
−
sspi
i
= 0
ss
pxi
=∑
0
spddn0 2
=∑
sspi
i
= 0
ss pdd
nx = = ⋅∑0
212
Gl. 6.6-8
Gl. 6.6-9
Gl. 6.6-10
Gl. 6.6-11
Gl. 6.6-12
Gl. 6.6-13
Gl. 6.6-14
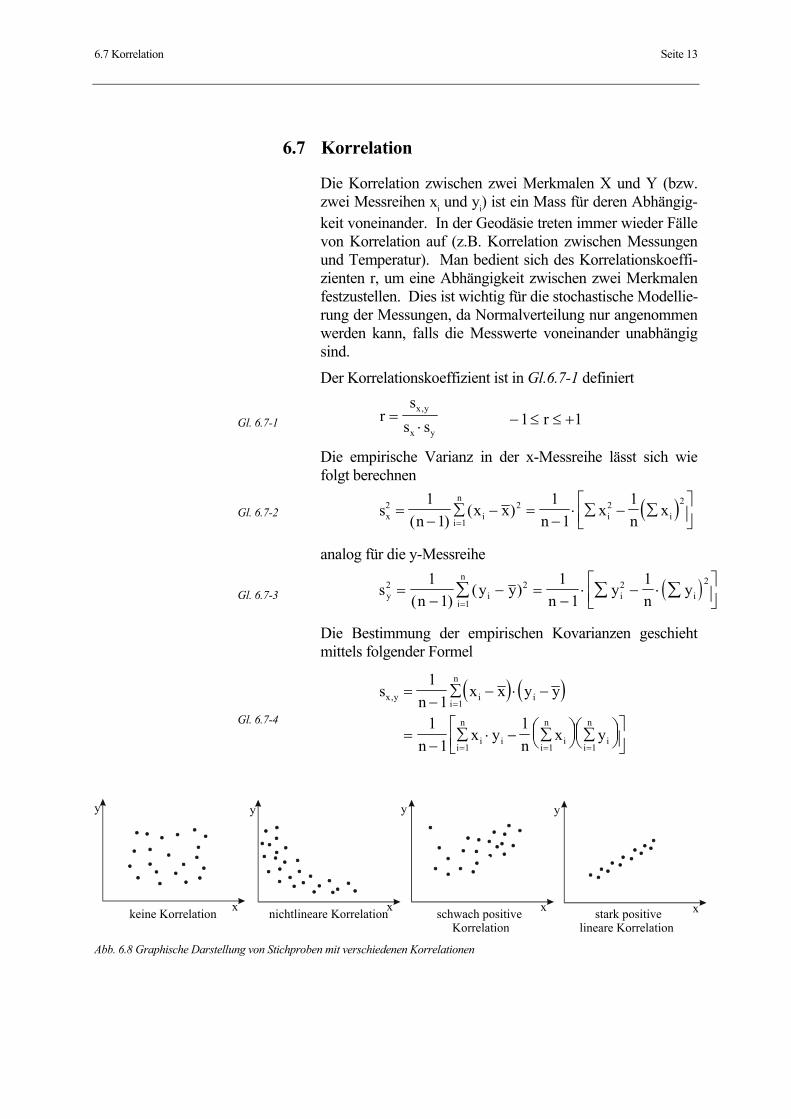
6.7 Korrelation Seite 13
6.7 Korrelation
Die Korrelation zwischen zwei Merkmalen X und Y (bzw. zwei Messreihen xi und yi) ist ein Mass für deren Abhängig-keit voneinander. In der Geodäsie treten immer wieder Fälle von Korrelation auf (z.B. Korrelation zwischen Messungen und Temperatur). Man bedient sich des Korrelationskoeffi-zienten r, um eine Abhängigkeit zwischen zwei Merkmalen festzustellen. Dies ist wichtig für die stochastische Modellie-rung der Messungen, da Normalverteilung nur angenommen werden kann, falls die Messwerte voneinander unabhängig sind.
Der Korrelationskoeffizient ist in Gl.6.7-1 definiert
Die empirische Varianz in der x-Messreihe lässt sich wie folgt berechnen
analog für die y-Messreihe
Die Bestimmung der empirischen Kovarianzen geschieht mittels folgender Formel
rs
s sx y
x y=
⋅,
− ≤ ≤ +1 1r
( )sn
x xn
xn
xx ii
n
i i2 2
1
2 211
11
1=
−−∑ =
−⋅ ∑ − ∑
=( )
( )
( )sn
y yn
yn
yy ii
n
i i2 2
1
2 211
11
1=
−− =
−⋅ − ⋅
=
∑ ∑∑( )( )
( ) ( )sn
x x y y
nx y
nx y
x y i ii
n
i i ii
n
ii
n
i
n
, =−
− ⋅ −∑
=−
⋅ − ∑
∑
∑
=
= ==
11
11
11
1 11
keine Korrelation nichtlineare Korrelation schwach positive stark positiveKorrelation lineare Korrelation
y y y y
xxxx
Abb. 6.8 Graphische Darstellung von Stichproben mit verschiedenen Korrelationen
Gl. 6.7-1
Gl. 6.7-2
Gl. 6.7-3
Gl. 6.7-4

Seite 14 6. Geodätische Statistik
6.8 Vertrauensintervall (Bereichsschätzung)
6.8.1 Zweck und Definition
Aufgrund der beschränkten Instrumentengenauigkeit und kleineren zufälligen Abweichungen während der Messungen, müssen in der geodätischen Statistik die aus dem Messpro-zess gewonnenen Beobachtungen als Realisierungen einer Zufallsvariablen X im Rahmen eines Zufallsexperimentes betrachtet werden. Wie in Kap. 6.4 dargestellt, beschreiben die Wahrscheinlichkeitsdichte f(x) bzw. Wahrscheinlich-keitsverteilung F(x) die stochastischen Eigenschaften der Zu-fallsvariablen vollständig.
Da jedoch in der Praxis anstelle der Beschreibung mittels Wahrscheinlichkeitsdichte eine einfachere Charakterisie-rung der Beobachtungen gewünscht ist, wird das Vertrau-ensintervall VI (auch Konfidenzintervall genannt) wie folgt eingeführt:
VI1-α = [Tu ; To] ⇔ P(Tu ≤ x ≤ To) = F(To) - F(Tu) = 1-α
Häufig wird für die Konfidenzzahl (1-α) der Wert 95% bzw. α zu 5% gewählt (zur Wahl von α vgl. Kap. 6.8.4.).
6.8.2 Vertrauensintervall bei normalverteilten Zu-fallsvariablen
Meistens kann bei der Berechnung des VI vorausgesetzt werden, dass die Zufallsvariable X als normalverteilte Grös-se mit dem Erwartungswert µ und der Standardabwei-chung σ beschrieben werden kann. Auch Parameter, welche mittels Mittelung oder Ausgleichungsrechnung aus den Beo-bachtungen geschätzt werden, können als normalverteilte Zufallsvariablen beschrieben werden.
µ und σ sind entweder bekannt oder müssen anderenfalls aus n Beobachtungen geschätzt werden gemäss:
Das (1-α)%ige-VertrauensintervallVI1−α ist ein Bereich, innerhalbdessen unterer Schranke Tu undoberen Schranke To (Tu ≤ To) dieRealisierung x einer Zufallsvariab-len X mit einer bestimmten Wahr-scheinlichkeit (1-α) liegt.
Gl. 6.8-1
Schätzung für : sσ =−
⋅ ∑ − ⋅ ∑
= =
11
12
1 1
2
nx
nxi
i
n
ii
n
siehe Gl.6.3-1
siehe Gl. 6.5-7
Schätzung für µ : xx
ni
i
n
= ∑ =1
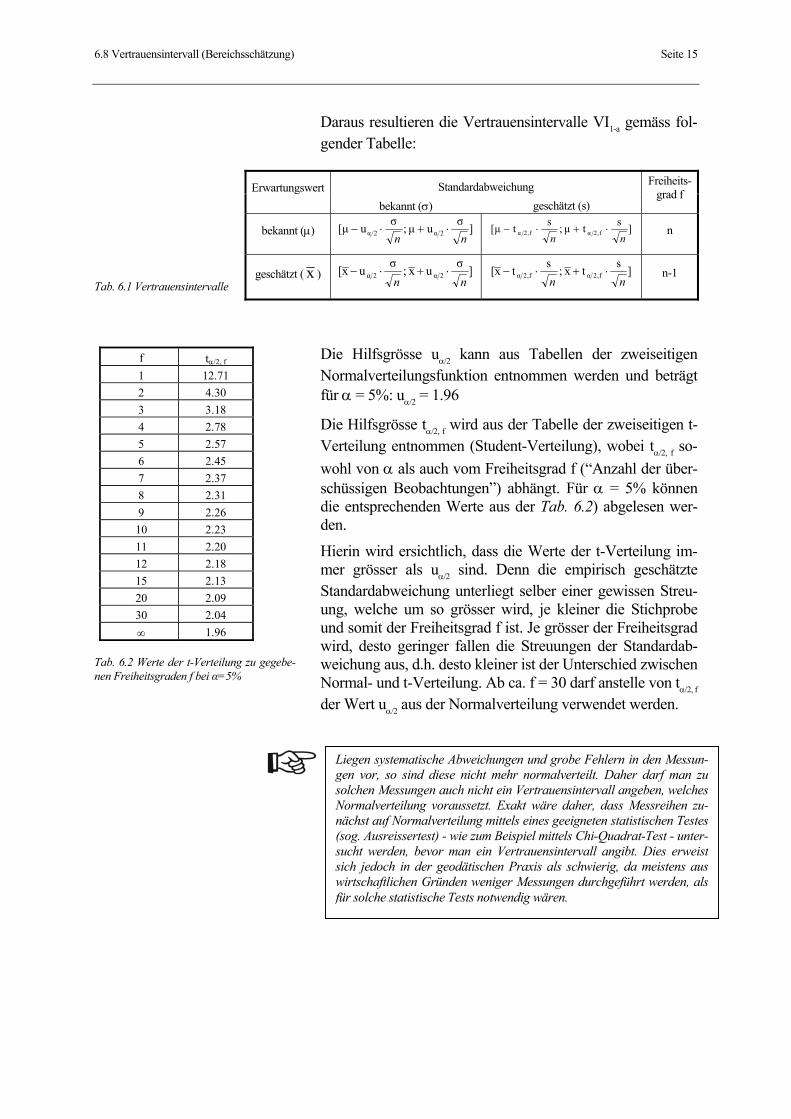
6.8 Vertrauensintervall (Bereichsschätzung) Seite 15
Daraus resultieren die Vertrauensintervalle VI1-a gemäss fol-gender Tabelle:
Die Hilfsgrösse uα/2 kann aus Tabellen der zweiseitigen Normalverteilungsfunktion entnommen werden und beträgt für α = 5%: uα/2 = 1.96
Die Hilfsgrösse tα/2, f wird aus der Tabelle der zweiseitigen t-Verteilung entnommen (Student-Verteilung), wobei tα/2, f so-wohl von α als auch vom Freiheitsgrad f (“Anzahl der über-schüssigen Beobachtungen”) abhängt. Für α = 5% können die entsprechenden Werte aus der Tab. 6.2) abgelesen wer-den.
Hierin wird ersichtlich, dass die Werte der t-Verteilung im-mer grösser als uα/2 sind. Denn die empirisch geschätzte Standardabweichung unterliegt selber einer gewissen Streu-ung, welche um so grösser wird, je kleiner die Stichprobe und somit der Freiheitsgrad f ist. Je grösser der Freiheitsgrad wird, desto geringer fallen die Streuungen der Standardab-weichung aus, d.h. desto kleiner ist der Unterschied zwischen Normal- und t-Verteilung. Ab ca. f = 30 darf anstelle von tα/2, f der Wert uα/2 aus der Normalverteilung verwendet werden.
Tab. 6.1 Vertrauensintervalle
f tα/2, f
1 12.712 4.303 3.184 2.785 2.576 2.457 2.378 2.319 2.2610 2.2311 2.2012 2.1815 2.1320 2.0930 2.04∞ 1.96
Tab. 6.2 Werte der t-Verteilung zu gegebe-nen Freiheitsgraden f bei α=5%
Liegen systematische Abweichungen und grobe Fehlern in den Messun-gen vor, so sind diese nicht mehr normalverteilt. Daher darf man zusolchen Messungen auch nicht ein Vertrauensintervall angeben, welchesNormalverteilung voraussetzt. Exakt wäre daher, dass Messreihen zu-nächst auf Normalverteilung mittels eines geeigneten statistischen Testes(sog. Ausreissertest) - wie zum Beispiel mittels Chi-Quadrat-Test - unter-sucht werden, bevor man ein Vertrauensintervall angibt. Dies erweistsich jedoch in der geodätischen Praxis als schwierig, da meistens auswirtschaftlichen Gründen weniger Messungen durchgeführt werden, alsfür solche statistische Tests notwendig wären.
Standardabweichung Erwartungswert bekannt (σ) geschätzt (s)
Freiheits-grad f
bekannt (µ) ]σuµ ;σu[µ 2α2α nn⋅+⋅− ]stµ ;stµ[ f,2αf,2α nn
⋅+⋅− n
geschätzt ( x ) ]σux ;σux[ 2α2α nn⋅+⋅− ]stx ;stx[ f,2αf,2α
nn⋅+⋅− n-1

Seite 16 6. Geodätische Statistik
6.8.3 Vertrauensintervalle bei mehreren unbekann-ten Parametern
Mit Hilfe der Ausgleichungsrechnung (vgl. Kap. 6.12) wird ermöglicht, dass aus n Messungen mehrere unbekannte Pa-rameter (i = 1... u, wobei u = Anzahl der unbekannte Para-meter) geschätzt werden können. Soll das Vertrauensinter-vall für den geschätzten Parameter ix bestimmt werden, so muss zunächst die empirische Standardabweichung gemäss
geschätzt werden, wobei Kii(x) das i-te Diagonalelement aus der Kovarianzmatrix K(x) ist. Nun beträgt der für die Be-stimmung von tα/2, f notwendige Freiheitsgrad f
f = n-u
Somit kann für den geschätzten Parameter xi das dazugehö-rende VI wie folgt gebildet werden:
VI1-α = [xi - tα/2, f ⋅ s ; xi + tα/2,f ⋅ ns ]
Falls die Standardabweichung si nicht geschätzt wird, son-dern aus einer a-priori Berechnung als σi gegeben ist, wird
VI1-α = [xi - uα/2u ⋅ σ ; xi + uα/2 nσ ].
6.8.4 Hypothesentest mit Hilfe des Vertrauensin-tervalls
Wenn für eine Zufallsvariable X mit E(X) = µ das Vertrau-ensintervall bekannt ist, kann man zu einem beliebigen Wert x* folgenden Hypothesentest durchführen:
Nullhypothese H0
Die Abweichung |x*-µ| vom Erwartungswert ist aufgrund zufälliger Abweichungen entstanden.
( )s K xi ii=Gl. 6.8-2
Gl. 6.8-3
Gl. 6.8-4
Gl. 6.8-5
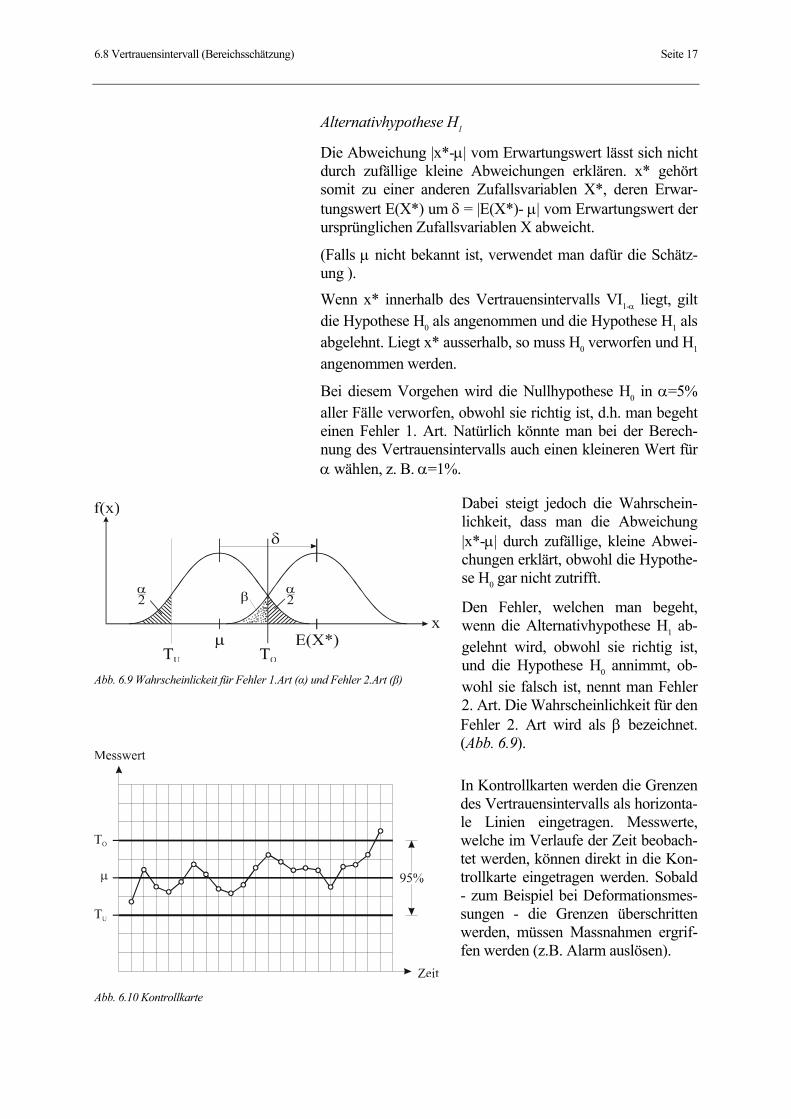
6.8 Vertrauensintervall (Bereichsschätzung) Seite 17
Alternativhypothese H1
Die Abweichung |x*-µ| vom Erwartungswert lässt sich nicht durch zufällige kleine Abweichungen erklären. x* gehört somit zu einer anderen Zufallsvariablen X*, deren Erwar-tungswert E(X*) um δ = |E(X*)- µ| vom Erwartungswert der ursprünglichen Zufallsvariablen X abweicht.
(Falls µ nicht bekannt ist, verwendet man dafür die Schätz-ung ).
Wenn x* innerhalb des Vertrauensintervalls VI1-α liegt, gilt die Hypothese H0 als angenommen und die Hypothese H1 als abgelehnt. Liegt x* ausserhalb, so muss H0 verworfen und H1 angenommen werden.
Bei diesem Vorgehen wird die Nullhypothese H0 in α=5% aller Fälle verworfen, obwohl sie richtig ist, d.h. man begeht einen Fehler 1. Art. Natürlich könnte man bei der Berech-nung des Vertrauensintervalls auch einen kleineren Wert für α wählen, z. B. α=1%.
Dabei steigt jedoch die Wahrschein-lichkeit, dass man die Abweichung |x*-µ| durch zufällige, kleine Abwei-chungen erklärt, obwohl die Hypothe-se H0 gar nicht zutrifft.
Den Fehler, welchen man begeht, wenn die Alternativhypothese H1 ab-gelehnt wird, obwohl sie richtig ist, und die Hypothese H0 annimmt, ob-wohl sie falsch ist, nennt man Fehler 2. Art. Die Wahrscheinlichkeit für den Fehler 2. Art wird als β bezeichnet. (Abb. 6.9).
In Kontrollkarten werden die Grenzen des Vertrauensintervalls als horizonta-le Linien eingetragen. Messwerte, welche im Verlaufe der Zeit beobach-tet werden, können direkt in die Kon-trollkarte eingetragen werden. Sobald - zum Beispiel bei Deformationsmes-sungen - die Grenzen überschritten werden, müssen Massnahmen ergrif-fen werden (z.B. Alarm auslösen).
Abb. 6.9 Wahrscheinlickeit für Fehler 1.Art (α) und Fehler 2.Art (β)
Abb. 6.10 Kontrollkarte
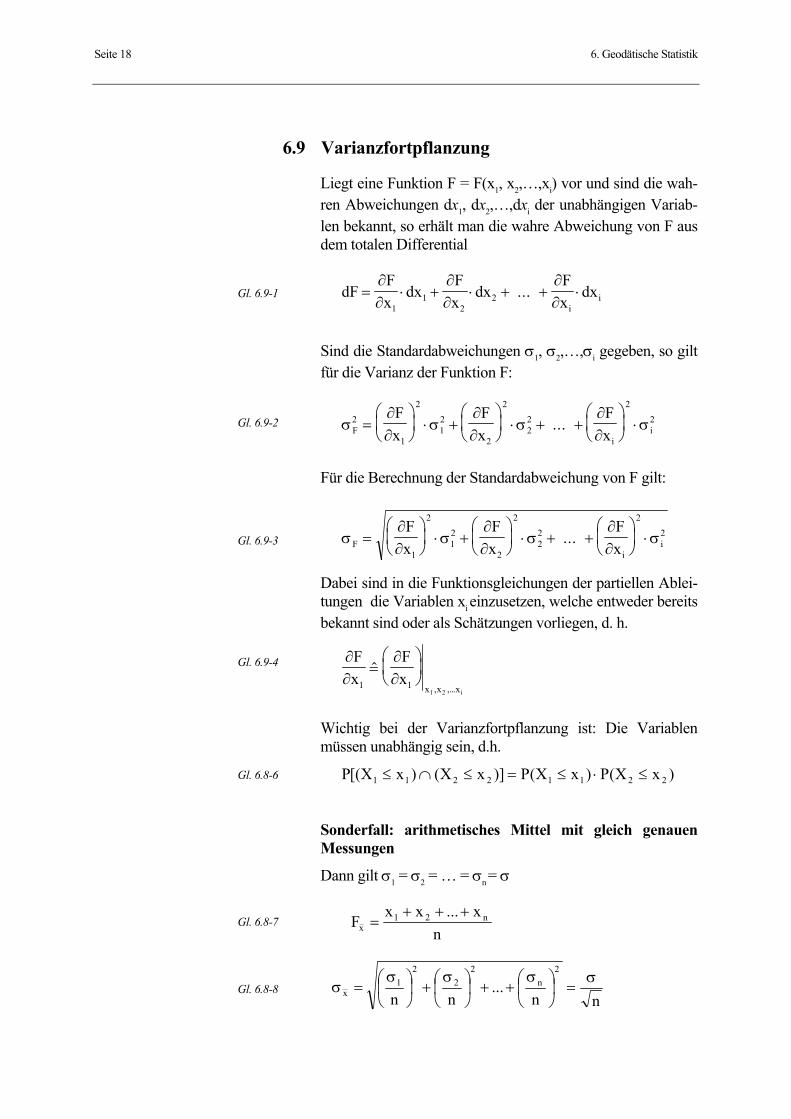
Seite 18 6. Geodätische Statistik
6.9 Varianzfortpflanzung
Liegt eine Funktion F = F(x1, x2,…,xi) vor und sind die wah-ren Abweichungen dx1, dx2,…,dxi der unabhängigen Variab-len bekannt, so erhält man die wahre Abweichung von F aus dem totalen Differential
Sind die Standardabweichungen σ1, σ2,…,σi gegeben, so gilt für die Varianz der Funktion F:
Für die Berechnung der Standardabweichung von F gilt:
Dabei sind in die Funktionsgleichungen der partiellen Ablei-tungen die Variablen xi einzusetzen, welche entweder bereits bekannt sind oder als Schätzungen vorliegen, d. h.
Wichtig bei der Varianzfortpflanzung ist: Die Variablen müssen unabhängig sein, d.h.
)xX(P)xX(P)]xX()xX[(P 22112211 ≤⋅≤=≤∩≤
Sonderfall: arithmetisches Mittel mit gleich genauen Messungen
Dann gilt σ1 = σ2 = … = σn = σ
n
x...xxF n21x
+++=
nn
...nn
2n
22
21
xσ
=
σ
++
σ
+
σ
=σ
dFFx
dxFx
dxFx
dxi
i= ⋅ + ⋅ + + ⋅∂∂
∂∂
∂∂1
12
2 ...
σ∂∂
σ∂∂
σ∂∂
σFi
i
Fx
Fx
Fx
2
1
2
12
2
2
22
2
2=
⋅ +
⋅ + +
⋅ ...
σ∂∂
σ∂∂
σ∂∂
σFi
i
Fx
Fx
Fx
=
⋅ +
⋅ + +
⋅
1
2
12
2
2
22
2
2 ...
∂∂
∂∂
Fx
Fx
x x xi1 1
1 2
$, ,...
=
Gl. 6.9-1
Gl. 6.9-2
Gl. 6.9-3
Gl. 6.9-4
Gl. 6.8-6
Gl. 6.8-7
Gl. 6.8-8
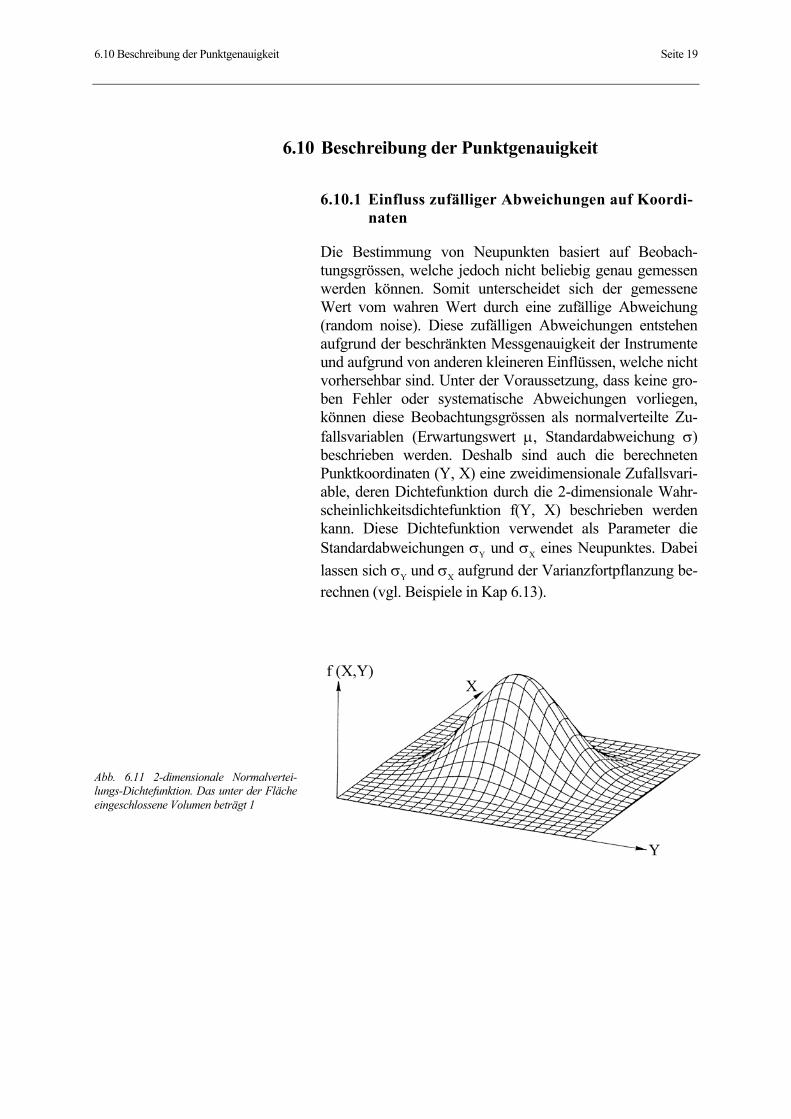
6.10 Beschreibung der Punktgenauigkeit Seite 19
6.10 Beschreibung der Punktgenauigkeit
6.10.1 Einfluss zufälliger Abweichungen auf Koordi-naten
Die Bestimmung von Neupunkten basiert auf Beobach-tungsgrössen, welche jedoch nicht beliebig genau gemessen werden können. Somit unterscheidet sich der gemessene Wert vom wahren Wert durch eine zufällige Abweichung (random noise). Diese zufälligen Abweichungen entstehen aufgrund der beschränkten Messgenauigkeit der Instrumente und aufgrund von anderen kleineren Einflüssen, welche nicht vorhersehbar sind. Unter der Voraussetzung, dass keine gro-ben Fehler oder systematische Abweichungen vorliegen, können diese Beobachtungsgrössen als normalverteilte Zu-fallsvariablen (Erwartungswert µ, Standardabweichung σ) beschrieben werden. Deshalb sind auch die berechneten Punktkoordinaten (Y, X) eine zweidimensionale Zufallsvari-able, deren Dichtefunktion durch die 2-dimensionale Wahr-scheinlichkeitsdichtefunktion f(Y, X) beschrieben werden kann. Diese Dichtefunktion verwendet als Parameter die Standardabweichungen σY und σX eines Neupunktes. Dabei lassen sich σY und σX aufgrund der Varianzfortpflanzung be-rechnen (vgl. Beispiele in Kap 6.13).
Abb. 6.11 2-dimensionale Normalvertei-lungs-Dichtefunktion. Das unter der Flächeeingeschlossene Volumen beträgt 1
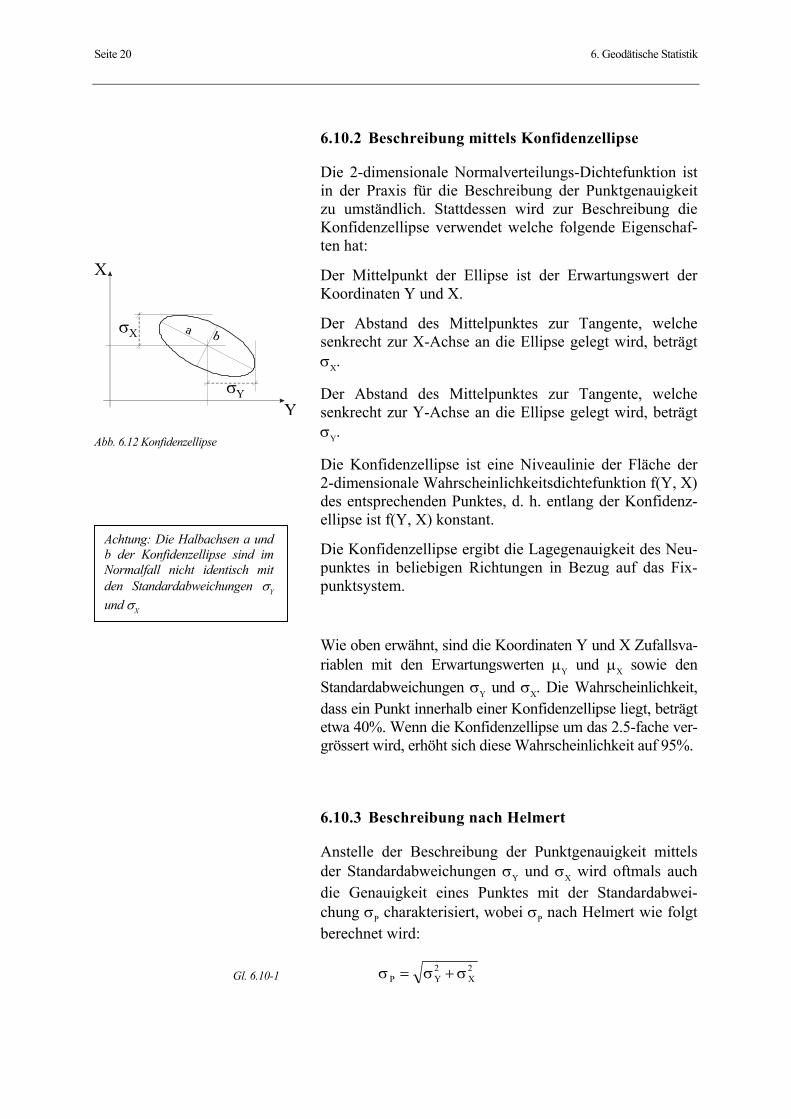
Seite 20 6. Geodätische Statistik
6.10.2 Beschreibung mittels Konfidenzellipse
Die 2-dimensionale Normalverteilungs-Dichtefunktion ist in der Praxis für die Beschreibung der Punktgenauigkeit zu umständlich. Stattdessen wird zur Beschreibung die Konfidenzellipse verwendet welche folgende Eigenschaf-ten hat:
Der Mittelpunkt der Ellipse ist der Erwartungswert der Koordinaten Y und X.
Der Abstand des Mittelpunktes zur Tangente, welche senkrecht zur X-Achse an die Ellipse gelegt wird, beträgt σX.
Der Abstand des Mittelpunktes zur Tangente, welche senkrecht zur Y-Achse an die Ellipse gelegt wird, beträgt σY.
Die Konfidenzellipse ist eine Niveaulinie der Fläche der 2-dimensionale Wahrscheinlichkeitsdichtefunktion f(Y, X) des entsprechenden Punktes, d. h. entlang der Konfidenz-ellipse ist f(Y, X) konstant.
Die Konfidenzellipse ergibt die Lagegenauigkeit des Neu-punktes in beliebigen Richtungen in Bezug auf das Fix-punktsystem.
Wie oben erwähnt, sind die Koordinaten Y und X Zufallsva-riablen mit den Erwartungswerten µY und µX sowie den Standardabweichungen σY und σX. Die Wahrscheinlichkeit, dass ein Punkt innerhalb einer Konfidenzellipse liegt, beträgt etwa 40%. Wenn die Konfidenzellipse um das 2.5-fache ver-grössert wird, erhöht sich diese Wahrscheinlichkeit auf 95%.
6.10.3 Beschreibung nach Helmert
Anstelle der Beschreibung der Punktgenauigkeit mittels der Standardabweichungen σY und σX wird oftmals auch die Genauigkeit eines Punktes mit der Standardabwei-chung σP charakterisiert, wobei σP nach Helmert wie folgt berechnet wird:
X
Y
σX
Yσ
a b
Achtung: Die Halbachsen a und b der Konfidenzellipse sind im Normalfall nicht identisch mit den Standardabweichungen σY und σX
Abb. 6.12 Konfidenzellipse
σ σ σP Y X= +2 2Gl. 6.10-1
6.10 Beschreibung der Punktgenauigkeit Seite 21
6.10.4 Vorgehen bei der a priori Berechnung der Punktgenauigkeit
Die Genauigkeit eines Punktes charakterisieren in der Regel die Standardabweichungen σY und σX , welche im Rahmen einer Präanalyse vor den eigentlichen Messungen - das heisst “a priori” - berechnet werden.
Dazu kann folgendes Vorgehen bei der a priori Beschreibung der Punktgenauigkeit angegeben werden:
1. Vorgabe der Standardabweichungen σY und σX bzw. der Punktgenauigkeit σP durch den Auftraggeber
2. Provisorische Wahl des Instrumentariums und Festle-gung der Messanordnung
3. Konfidenzellipsen bestimmen
4. Berechnung der Standardabweichungen σY und σX
bzw. der Punktgenauigkeit σP aus den Konfidenzel-lipsen
5. Überprüfen, ob die Standardabweichungen innerhalb des vom Auftraggebers geforderten Rahmens liegen, und nötigenfalls die Wahl der Instrumente und die Messanordnung entsprechend korrigieren.
6.10.5 Grundlagen zur Bestimmung der Konfidenz-ellipsen
Voraussetzung für die a priori-Bestimmung der Konfidenz-ellipsen ist die Kenntnis
− der Genauigkeit der Instrumente, welche für die Mes-sungen vorgesehen sind (Stochastisches Modell)
− sowie der geplanten Messanordnung und somit der Geometrie und Anzahl der Beobachtungen (Funktiona-les Modell).
Die Konfidenzellipsen können bestimmt werden, indem man entweder
− die Ellipsenparameter (a und b , Azimut der Halbachse a) analytisch berechnet und damit die Ellipse zeichnet bzw. auf einem Ausgabegerät vom Computer darstel-len lässt.
− oder die Konfidenzellipsen graphisch konstruiert (vgl. Kap. 6.10.6).
Seite 22 6. Geodätische Statistik
Die analytische Berechnung der Ellipsenparameter erfordert im allgemeinen Fall die Aufstellung und Inversion von Nor-malgleichungsmatrizen mittels Computer, weshalb der all-gemeine Fall hier nicht weiter betrachtet werden soll.
In besonders einfachen Fällen der analytischen Berechnun-gen können jedoch die Standardabweichungen σY und σX ohne Matrizenoperationen durch die direkte Anwendung des Varianzfortpflanzungsgesetzes gemäss Kap. 6.9. berechnet werden.
Beispiele dafür sind Punktkoordinaten, die durch polares Anhängen (1. geodätische Hauptaufgabe) oder durch einen Polygonzug bestimmt werden. Entsprechende Beispiele fin-den sich in Kap. 6.13.
6.10.6 Graphische Konstruktion von Konfidenzel-lipsen
Die graphische Konstruktion von Konfidenzellipsen kann bei Einzelpunkt-Einschaltungen angewendet werden:
− Vorwärts- und Rückwärtseinschneiden
− Bogenschnitt
− polares Anhängen
− und bei Kombinationen dieser Verfahren.
Die graphische Konstruktion bietet folgende Vorteile:
− rasch und mit einfachen Hilfsmitteln durchführbar
− kein grosser numerischer Aufwand notwendig
− das Verfahren liefert genügend präzise Aussagen zur Punktgenauigkeit
− anschaulich, Schwächen im Netzaufbau lassen sich rasch erkennen
Der Grundgedanke des Verfahrens besteht darin, dass zu al-len Richtungs- und Distanzmessungen, welche für die Be-stimmung des Neupunktes verwendet werden, die zufälligen, normalverteilten Abweichungen sich im Netzplan beim Neupunkt als Konfidenzbänder mit der Bandbreite ±σ dar-stellen lassen. Hierbei befindet sich der Neupunkt jeweils in der Mitte eines Konfidenzbandes.
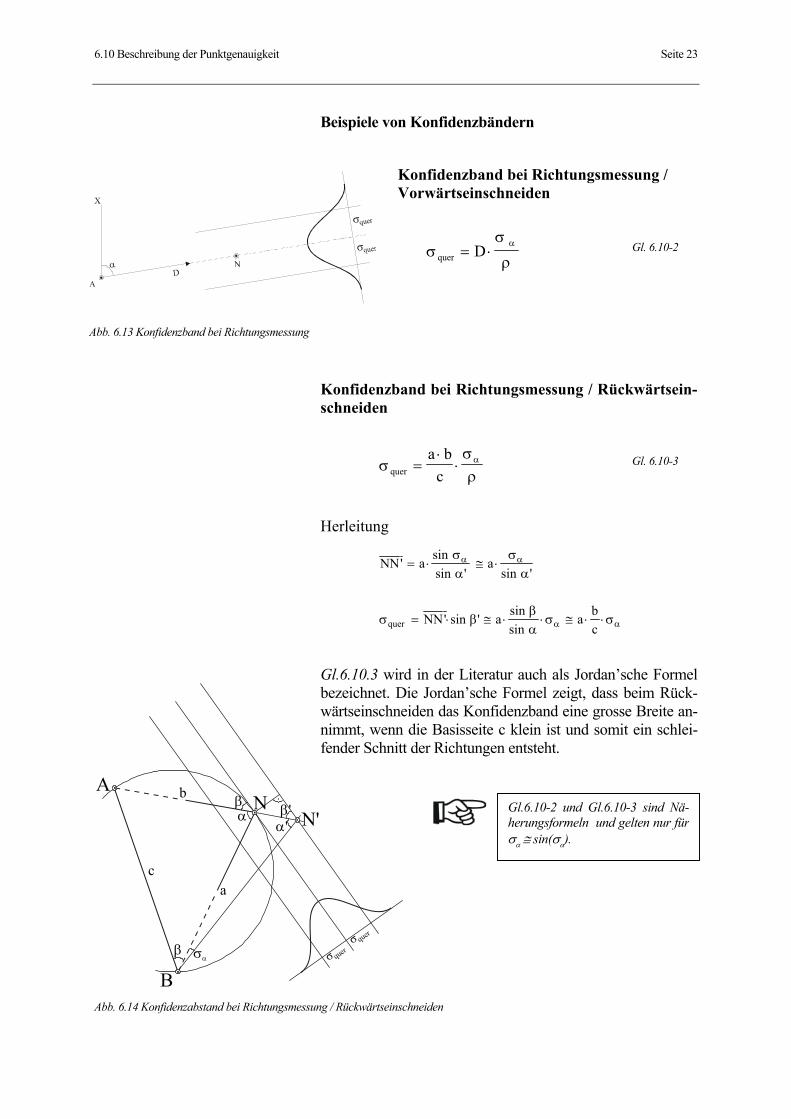
6.10 Beschreibung der Punktgenauigkeit Seite 23
σ querσ quer
NN'
A
B
a
b
c
α
β
β β'
σα
α'
Beispiele von Konfidenzbändern
Konfidenzband bei Richtungsmessung / Vorwärtseinschneiden
Konfidenzband bei Richtungsmessung / Rückwärtsein-schneiden
Herleitung
Gl.6.10.3 wird in der Literatur auch als Jordan’sche Formel bezeichnet. Die Jordan’sche Formel zeigt, dass beim Rück-wärtseinschneiden das Konfidenzband eine grosse Breite an-nimmt, wenn die Basisseite c klein ist und somit ein schlei-fender Schnitt der Richtungen entsteht.
σσ
ρα
quer D= ⋅
σσρ
αquer
a bc
=⋅
⋅
NN a a'sinsin ' sin '
= ⋅ ≅ ⋅σα
σα
α α
σ ββα
σ σα αquer NN a a bc
= ⋅ ≅ ⋅ ⋅ ≅ ⋅ ⋅' sin ' sinsin
Gl.6.10-2 und Gl.6.10-3 sind Nä-herungsformeln und gelten nur fürσα ≅ sin(σα).
Abb. 6.13 Konfidenzband bei Richtungsmessung
Gl. 6.10-2
Gl. 6.10-3
Abb. 6.14 Konfidenzabstand bei Richtungsmessung / Rückwärtseinschneiden
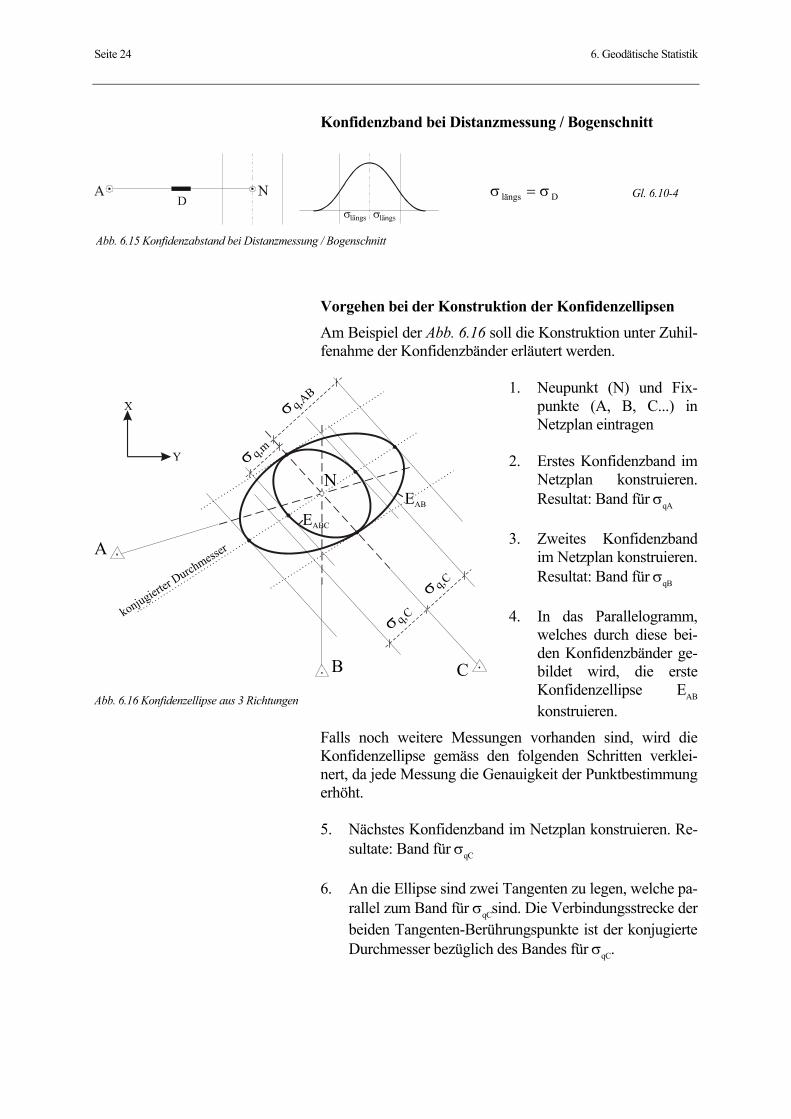
Seite 24 6. Geodätische Statistik
Konfidenzband bei Distanzmessung / Bogenschnitt
Vorgehen bei der Konstruktion der Konfidenzellipsen Am Beispiel der Abb. 6.16 soll die Konstruktion unter Zuhil-fenahme der Konfidenzbänder erläutert werden.
1. Neupunkt (N) und Fix-
punkte (A, B, C...) in Netzplan eintragen
2. Erstes Konfidenzband im
Netzplan konstruieren. Resultat: Band für σqA
3. Zweites Konfidenzband
im Netzplan konstruieren. Resultat: Band für σqB
4. In das Parallelogramm,
welches durch diese bei-den Konfidenzbänder ge-bildet wird, die erste Konfidenzellipse EAB
konstruieren.
Falls noch weitere Messungen vorhanden sind, wird die Konfidenzellipse gemäss den folgenden Schritten verklei-nert, da jede Messung die Genauigkeit der Punktbestimmung erhöht. 5. Nächstes Konfidenzband im Netzplan konstruieren. Re-
sultate: Band für σqC 6. An die Ellipse sind zwei Tangenten zu legen, welche pa-
rallel zum Band für σqCsind. Die Verbindungsstrecke der beiden Tangenten-Berührungspunkte ist der konjugierte Durchmesser bezüglich des Bandes für σqC.
σ σlängs D=
Abb. 6.15 Konfidenzabstand bei Distanzmessung / Bogenschnitt
Gl. 6.10-4
A
B
NEAB
Y
X σ q,AB
σ q,m
σ q,C
σ q,C
C
EABC
konjugierter D
urchmesser
Abb. 6.16 Konfidenzellipse aus 3 Richtungen
6.10 Beschreibung der Punktgenauigkeit Seite 25
7. Zweites Parallelogramm konstruieren, das aus folgenden Bändern besteht:
- Konfidenzband σqm , welches parallel zum Band für σqCverläuft, wobei für σqm gilt:
- Zwei Parallelen, welche die Ellipse EAB berühren und parallel zum konjugierten Durchmesser sind.
8. Konstruktion der verkleinerten zweiten Ellipse EABC, die
in dieses Parallelogramm eingepasst wird.
Die Schritte 5 bis 8 sind so oft zu wiederholen, bis die Kon-fidenzbänder sämtlicher Richtungs- und Distanzmessungen im Netzplan eingetragen sind.
Am Ende dieses Verfahrens liegt die definitive Konfidenzel-lipse a priori im Netzplan eingezeichnet vor, aus welchen di-rekt die Standardabweichungen der Neupunktkoordinaten in Y- und X-Richtung abgegriffen werden können, sofern die Konfidenzbänder in einem einheitlichen Massstab (z.B. 1:1) und korrekt ausgerichtet im Netzplan eingetragen wurden.
In Kap. 6.13.18 wird das Vorgehen anhand dieses Beispieles mit numerischen Werten erläutert.
Gl. 6.10-5 1 1 1
2 2 2σ σ σqm qc qAB
= +
Seite 26 6. Geodätische Statistik
6.11 Zuverlässigkeit und Schutz vor groben Fehlern
In der geodätischen Statistik wird im allgemeinen vorausge-setzt, dass die Beobachtungen (Messungen) keine groben Fehler enthalten, sondern nur durch kleinere zufällige Ab-weichungen verfälscht sind, welche sich durch die Normal-verteilung beschreiben lassen.
Daher muss bei der Planung und Durchführung geodätischer Arbeiten darauf geachtet werden, dass Beobachtungen mit groben Fehlern entdeckt und von der Weiterverwendung ausgeschlossen werden können.
Dieser Schutz vor groben Fehlern bedingt, dass mehr Mes-sungen durchzuführen sind, als für die Lösung des gestellten Problems minimal notwendig wären.
Die Zuverlässigkeit einer Beobachtung ist ein Mass für die Wahrscheinlichkeit, dass ein grober Fehler, der die Beobach-tung um einen bestimmten Betrag verfälschen würde, ent-deckt wird.
Die Zuverlässigkeit kann im Rahmen einer Präanalyse ma-thematisch bereits vor der Ausführung der Feldarbeiten be-rechnet werden und das Resultat wird - bei der zweidimensi-onalen Punktbestimmung - in Form von Zuverlässigkeits-rechtecken dargestellt. Auf die mathematische Modellierung der Zuverlässigkeit wird aber im folgenden nicht näher ein-gegangen.
Vereinfachend sollen hingegen nun einige Grundsätze darge-stellt werden, welche in der geodätischen Praxis in der Regel zu zuverlässigen Resultaten führen.
Eine Messung ist keine Messung!
17. Jh Blaise Pascal und Pierre de Fermat:Begründer der klassischen Wahrschein-lichkeitstheorie Wahrscheinlichkeit = Quotient zwi-schen der ”Anzahl günstiger Fälle”und ”Alle Fälle”
1777-1855
Carl Friedrich Gauss: Methode derkleinsten Quadrate und ihre Anwen-dung auf geodätischen Beobachtungen,Einführung der Normalverteilung(”Gauss’sche Glockenkurve”), grund-legende Arbeiten im Bereich der Ma-thematik (Fundamentalsatz der Algeb-ra, Lösung linearer Gleichungssyste-me), der Astronomie (Vorhersage derPosition des Kleinplaneten Ceres) undOptik (Linsensysteme)
1876 Friedrich Robert Helmert: Chi-Quadrat-Test, verschiedene Arbeiten inder Geodäsie (Helmert-Transforma-tion)
1898 A. A. Markoff: Weiterentwicklung derAusgleichungsrechnung (Gauss-Markoff-Modell) Beschreibung vonstochastischen Prozessen (Anwendungz.B. in der Signalübertragung)
1933 A. N. Kolmogoroff: Formulierung der 4Axiome der Wahrscheinlichkeits-theorie. Wahrscheinlichkeit als ”Funk-tion, welche einem Ereignis einen Wertzwischen 0 und 1 zuordnet, wobei 1 dassichere Ereignis ist”
1890-1962 S. R. Fisher: Entwicklung einer Vielzahlvon statistischen Methoden (Hypothe-sen-Tests, F-Test), vor allem in derBiologie und Landwirtschaft.
Ab 1930 Einführung von statistischen Methodenin industriellen Produktionsprozessen(Kontrollkarten)
Ab 1960 Entwicklung der robusten Ausgleichung
Tab. 6.3 Geschichtlicher Hintergrund der geodätischen Statistik
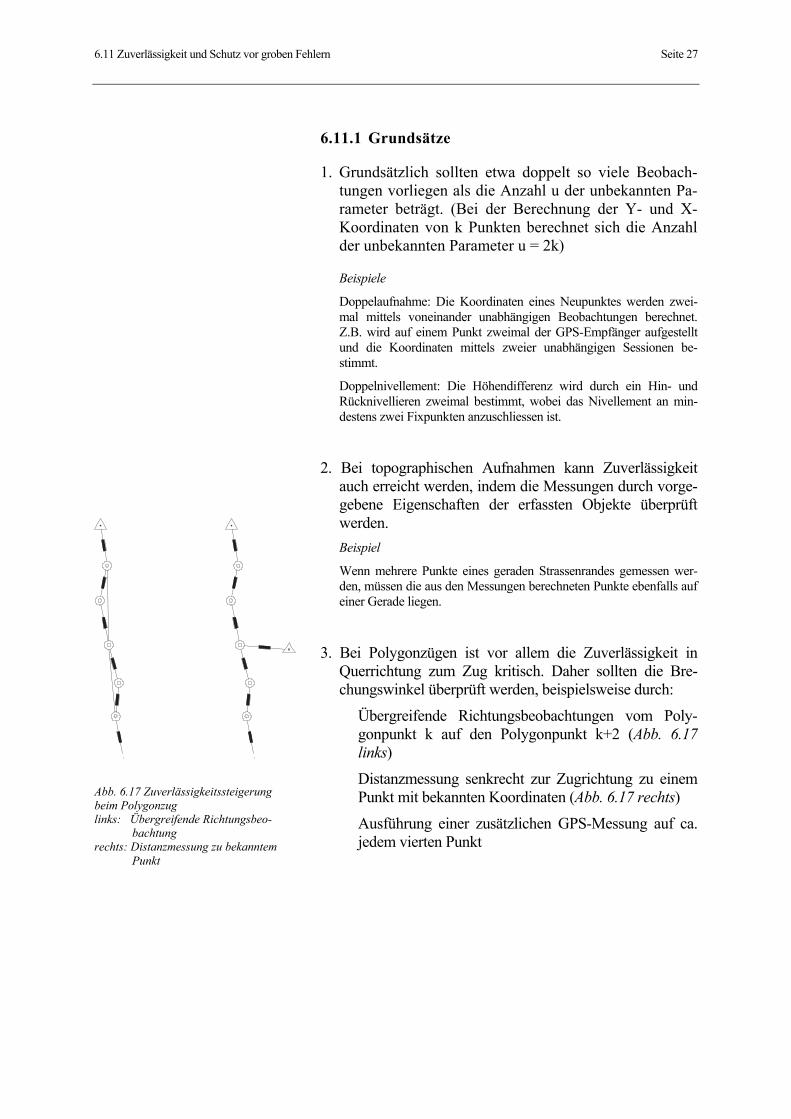
6.11 Zuverlässigkeit und Schutz vor groben Fehlern Seite 27
6.11.1 Grundsätze
1. Grundsätzlich sollten etwa doppelt so viele Beobach-tungen vorliegen als die Anzahl u der unbekannten Pa-rameter beträgt. (Bei der Berechnung der Y- und X-Koordinaten von k Punkten berechnet sich die Anzahl der unbekannten Parameter u = 2k)
Beispiele
Doppelaufnahme: Die Koordinaten eines Neupunktes werden zwei-mal mittels voneinander unabhängigen Beobachtungen berechnet. Z.B. wird auf einem Punkt zweimal der GPS-Empfänger aufgestellt und die Koordinaten mittels zweier unabhängigen Sessionen be-stimmt.
Doppelnivellement: Die Höhendifferenz wird durch ein Hin- und Rücknivellieren zweimal bestimmt, wobei das Nivellement an min-destens zwei Fixpunkten anzuschliessen ist.
2. Bei topographischen Aufnahmen kann Zuverlässigkeit auch erreicht werden, indem die Messungen durch vorge-gebene Eigenschaften der erfassten Objekte überprüft werden.
Beispiel
Wenn mehrere Punkte eines geraden Strassenrandes gemessen wer-den, müssen die aus den Messungen berechneten Punkte ebenfalls auf einer Gerade liegen.
3. Bei Polygonzügen ist vor allem die Zuverlässigkeit in Querrichtung zum Zug kritisch. Daher sollten die Bre-chungswinkel überprüft werden, beispielsweise durch:
Übergreifende Richtungsbeobachtungen vom Poly-gonpunkt k auf den Polygonpunkt k+2 (Abb. 6.17 links)
Distanzmessung senkrecht zur Zugrichtung zu einem Punkt mit bekannten Koordinaten (Abb. 6.17 rechts)
Ausführung einer zusätzlichen GPS-Messung auf ca. jedem vierten Punkt
Abb. 6.17 Zuverlässigkeitssteigerung beim Polygonzug links: Übergreifende Richtungsbeo-
bachtung rechts: Distanzmessung zu bekanntem
Punkt

Seite 28 6. Geodätische Statistik
6.12 Einführung in die Ausgleichungsrechnung
Zur Lösung von Aufgaben in der geodätischen Messtechnik, bei welcher u unbekannte Parameter gesucht sind, werden im Normalfall mehr Beobachtungen n gemessen, als dass für die Bestimmung der unbekannten Parameter notwendig sind. Gründe dafür sind:
− Schutz gegen grobe Fehler (vgl. dazu Kap. 6.11)
− Genauigkeit der Ergebnisse steigern (“Das Mittel ist genauer als die einzelne Messung”)
− Schätzung der erreichten Messgenauigkeit
− Durchführung von Hypothesen-Tests.
Somit liegen f überschüssige Beobachtungen vor, wobei
f = n - u
die Redundanz bezeichnet. Der Grundgedanke der Ausglei-chungsrechnung liegt darin, dass jede Beobachtung einen Beitrag zur Bestimmung der u unbekannten Parameter liefert und somit berücksichtigt werden muss. Eine mathematische Lösung kann jedoch nur gefunden werden, wenn verlangt wird, dass eine Beobachtung nicht ganz exakt ist, sondern mit einer bestimmten Verbesserung noch korrigiert werden darf. Natürlich muss die Berechnung der Verbesserungen aufgrund von plausiblen Grundsätzen durchgeführt werden.
Dazu wird in der geodätischen Ausgleichsrechnung die Me-thode der kleinsten Quadrate eingesetzt. Als Methode zur Schätzung unbekannter Parameter zielt diese darauf ab, dass man die Quadratsumme der Differenzen zwischen den Beo-bachtungen il und den Schätzwerten il ihrer Erwartungswer-te E( il ), die Funktionen der unbekannten Parameter darstel-len, minimiert.
i = 1 ... n, n = Anzahl der Beobachtungen
Schätzwerte werden durch einen Überstrich gekennzeichnet.
Gl. 6.12-1
Es gibt auch andere Ausgleichungsverfahren.
• Beispiel 1 (Ausgleichung nach Laplace): Minimiere die Summe der Absolutbeträge der Differenzen zwischen denBeobachtungen li und den Schätzwerten il , d.h. ∑ → minv
• Beispiel 2 (Ausgleichung nach Tschebischeff): Minimiere die grösste Abweichung zwischen den Beobachtungen liund den Schätzwerten il , d.h. minmax →v
• Beispiel 3: Medianschätzung und andere robuste Ausgleichungsverfahren
6.12 Einführung in die Ausgleichungsrechnung Seite 29
Allgemein lässt sich in Matrizenform schreiben:
oder
wobei gilt
Hierbei ist P die Gewichtsmatrix. In deren Inversen P-1, in der Kofaktorenmatrix Q, entsprechen die kleinen Varianzen den Beobachtungen mit grossen Gewichten.
wobei gilt σi2 Varianz der i-ten Beobachtung
σik Kovarianz zwischen der i-ten und der k- ten Beobachtung
σ02 Varianz der Gewichtseinheit (d.h. einer
Beobachtung mit Gewicht 1)
K(l) Kovarianzmatrix
P Gewichtsmatrix
Q Kofaktorenmatrix
( ) ( )l l P l l− − →T min
v PvT min→
( )l = l l l n1 2, ,T
K
( )l = l l ln1 2, ,T
K
v l l= −
P Q K l− = =
=1
02
12
12 1
12 22
12
02
1 1σ
σ σ σσ σ
σ σσ
K
K K
n
n n
( )
Gl. 6.12-2
Gl. 6.12-3
Gl. 6.12-4
Gl. 6.12-5
Seite 30 6. Geodätische Statistik
6.12.1 Herleitung der Schätzwerte der Ausgleichung nach vermittelnden Beobachtungen nach der Methode der kleinsten Quadrate
Im folgenden soll l der Vektor der Beobachtungen sein, des-sen Erwartungswert E(l) dem linearen Gleichungssystem
E(l) = A x
genügen soll, und dessen Beobachtungen sich mit der Kova-rianzmatrix K = σ0
2 P-1 beschreiben lassen. Dabei wird x - der Vektor der unbekannten Parameter - nach der Methode der kleinsten Quadrate derart bestimmt, dass die Schätzfunk-tion S(x) mit
minimal wird. Der Extremwert wird über die notwendigen Bedingungen bestimmt, so dass
ist. Hieraus folgt nun das sogenannte Normalgleichungssys-tem
wobei in der Literatur häufig die Matrix ATPA als Normal-gleichungsmatrix N bezeichnet wird.
Und somit folgt für die Schätzwerte der unbekannten Para-meter x:
Als Zusatz ergibt sich mit Einführung der geschätzten Ver-besserungen (oder Residuen)
dass auch die Quadratsumme der Verbesserungen vTPv mi-nimal wird.
( ) ( )S( ) Tx Ax l P Ax l= − −1
02σ
( )∂∂ σS( )x
xA Pl A PAx 0= − + =
12 2
02
T T
− + =A Pl A PAx 0T T
( )x A PA A Pl=−T T1
v l l Ax l= − = −
Gl. 6.12-6
Anmerkung: Die Ausgleichungnach vermittelnden Beobach-tungen wird in der StatistikGauss-Markoff Modell ge-nannt, denn Gauss [1808] leite-te in diesem Modell die Metho-de der kleinsten Quadrate abund zeigte, dass diese auf einebeste Schätzung führt. Einebeste Schätzung bedeutet, dassdie Schätzung der zu schätzen-den Grösse möglichst nahekommt, die quadrierte Differenzbeider Werte also minimalwird. Markoff [1912] bestimmte dieParameter dieses Modells mitHilfe der besten erwartungs-treuen Schätzung. Erwartungs-treue bedeutet, dass der Erwar-tungswert der Abweichung derSchätzung von der zu schätzen-den Grösse Null ist.
Gl. 6.12-7
Gl. 6.12-8
Gl. 6.12-9
Gl. 6.12-10
Gl. 6.12-11
6.12 Einführung in die Ausgleichungsrechnung Seite 31
6.12.2 Modell der Ausgleichung nach vermittelnden Beobachtungen (Gauss-Markoff Modell)
Das Modell der Ausgleichung nach vermittelnden Beobach-tungen (Gauss-Markoff Modell, auch vermittelnde Ausglei-chung genannt) lässt sich folgendermassen beschreiben:
mit
oder alternativ
A x = E(l)
mit
und
E (v) = 0.
Beobachtungen (Anzahl n) gegeben
Koeffizientenmatrix bekannt
unbekannte Parameter (Anzahl u) unbekannt
Verbesserungen unbekannt 201x1
σ Varianz der Gewichtseinheit (a priori) gegeben
Gewichtsmatrix gegeben
Hierbei sind die unbekannten Parameter die primären Ziel-grössen.
Die Schätzwerte für die unbekannten Parameter ergeben sich zu
Als sekundäre Zielgrösse wird die Varianz der Gewichtsein-heit a posteriori s0
2 geschätzt mit:
Ax l v= +
K l P( ) = −σ 2 1
( ) ( )K l P K v= =−σ 2 1
l n×1
A n u×
x u×1
v n×1
Pn n×
( )x A PA A Pl=−T T1
( ) ( )sn u n u0
2 1 1=
−− − =
−Ax l P Ax l v PvT T
In der Ausgleichung nachvermittelnden Beobachtungenlassen sich die Schätzwerte derBeobachtungen als Ergebniseiner linearisierten Funktions-gleichung Ax berechnen. DieBeobachtungen sind also nichtvon den Beträgen andererBeobachtungen abhängig.
Gl. 6.12-12
Gl. 6.12-13
Gl. 6.12-14
Gl. 6.12-15
Gl. 6.12-16
Gl. 6.12-17
Gl. 6.12-18

Seite 32 6. Geodätische Statistik
Und die Kovarianzmatrix a posteriori der geschätzten Para-meter ist mit
zu berechnen. Die Kovarianzmatrix (Dimension: u×u) a posteriori der geschätzten Parameter ist somit gerade die In-verse der Normalgleichungsmatrix N multipliziert mit der Varianz der Gewichtseinheit.
Somit stehen die Varianzen der unbekannten Parameter in der Diagonale der Kovarianzmatrix der geschätzten Parame-ter.
6.12.3 Vorgehen zur Lösung von Aufgaben gemäss des Modells der Ausgleichung nach vermit-telnden Beobachtungen (Gauss-Markoff Mo-dell)
Schritt 1 Falls nötig: Beobachtungsgleichungen linearisieren Die Beobachtungsgleichungen F(x1, x2, ... xu) stellen den Zu-sammenhang zwischen den Beobachtungen und unbekann-ten Parametern her (funktionales Modell).
li + vi = Fi(x1, x2, ... xu)
mit
Fi(x1, x2, ... xu) i-te Beobachtungsgleichung (i = 1...n)
li i-te Beobachtung (i = 1...n)
vi Residuum (Verbesserung) der i-ten Beob- achtung
x1, x2, ... xu Unbekannte Parameter
n Anzahl Messungen
( )K x A PA( ) T=−
s02 1
Gl. 6.12-19
Gl. 6.12-20
6.12 Einführung in die Ausgleichungsrechnung Seite 33
Falls die Beobachtungsgleichungen ein lineares Gleichungs-system darstellen, d.h.
l + v = F(x1, x2, ... xu) = Ax
mit
x Vektor der unbekannten Parameter (x1, x2, ... xu)T
A Koeffizientenmatrix
so müssen die Beobachtungsgleichungen nicht mehr lineari-siert werden und es kann direkt mit dem Schritt 2 fortgefah-ren werden.
Sofern ihre Beobachtungsgleichungen F (x1, x2, ... xu) nicht linear sind, müssen sie zunächst mittels geeigneter Nähe-rungswerte linearisiert werden, da das Gauss-Markoff-Modell ein lineares Ausgleichungsmodell ist.
Für eine Linearisierung werden Näherungswerte für die un-bekannten Parameter benötigt. Mit den Näherungen x1
(0), x2(0), ... xu
(0) für die unbekannten Parameter x1, x2, ... xu
werden die Koeffizienten aik berechnet, indem von der i-ten Funktionsgleichung die partielle Ableitung nach dem k-ten unbekannten Parameter gebildet wird und in die Funktions-gleichung der partiellen Ableitung dann die Näherungswerte eingesetzt werden. Formal dargestellt berechnen sich die Ko-effizienten aik zu:
Die Anzahl der Koeffizienten beträgt n × u.
Zudem sind im nichtlinearen Fall die sogenannten Absolut-glieder fi (“gemessen - genähert”) wie folgt zu berechnen:
mit
Fi(x1(0), x2
(0), ... xu(0)) Wert der nichtlinearen Funktions-
gleichung, in welche die Nähe-rungswerte eingesetzt wurden
li Beobachtung (i = 1...n)
Die Anzahl der Absolutglieder beträgt n (n =Anzahl Beo-bachtungen).
Gl. 6.12-21
( )a
F x x xx
x x xik
i u
ku
=∂
∂1 2
10
20 0
, ,
, ,( ) ( ) ( )
K
K
( )f l F x x xi i i u= − 10
20 0( ) ( ) ( ), ,K
Gl. 6.12-22
Gl. 6.12-23
Seite 34 6. Geodätische Statistik
Schritt 2 Aufstellung der Verbesserungsgleichungen
Die Verbesserungsgleichungen sind im Gegensatz zu den Beobachtungen linear und können wie folgt gebildet werden:
Fall a)
Beobachtungen hängen von linearer Funktionsgleichung ab. Daraus folgt direkt:
v = Ax - l aus der linearen Beobachtungsgleichung F(x) = Ax und den Beobachtungen l.
Fall b)
Beobachtungen hängen von nichtlinearer Funktionsglei-chung Fj ab. In diesem Fall berechnen sich die Verbesse-rungsgleichungen zu
v = Ax - f mit
f Vektor der Absolutglieder
A (n x u)-Matrix mit den Koeffizienten aik aus den partiellen Ableitungen (Jacobi-Matrix)
Schritt 3 Kovarianzmatrix und Gewichte Nun wird die Kovarianzmatrix K(l) der Beobachtungen ge-mäss Gl.6.12-5 aufgestellt und Varianz der Gewichtseinheit a priori σ0
2 vorgegeben. Daraus folgt die Matrix P gemäss Gl.6.12-5.
Im Normalfall können die Beobachtungen als unabhängig voneinander vorausgesetzt werden, so dass P eine Diago-nalmatrix ist. Sind die Beobachtungen zudem auch noch gleich genau, dann wird P zur Einheitsmatrix.
Gl. 6.12-24
Gl. 6.12-25

6.12 Einführung in die Ausgleichungsrechnung Seite 35
Schritt 4 Unbekannte Parameter x berechnen
a) Im Falle linearer Beobachtungsgleichungen:
b) Im Falle nichtlinearer Beobachtungsgleichungen
mit
x(0) Vektor der Näherungswerte für die unbekannten Parameter, x(0) = (x1
(0), x2(0), ... xu
(0))T
Schritt 5 Verbesserungen berechnen Berechnung der Verbesserungen v aus
v = Ax – l bzw.
v = Ax – f
Schritt 6 Schlusskontrolle Die Schlusskontrolle ist vor allem für die Überprüfung der Güte der Linearisierung und zum Aufdecken von Rechenfeh-lern notwendig. Dazu werden die geschätzten unbekannten Parameter in alle Beobachtungsgleichungen eingesetzt. Da-bei sollte der berechnete Wert unter Berücksichtigung der Rechengenauigkeit mit dem Wert der ausgeglichenen Beo-bachtung übereinstimmen
?
(Bei nichtlinearen Beobachtungsgleichungen kann evtl. eine Iteration notwendig sein. In diesem Fall wird gemäss Schritt 1 die Linearisierung ein zweites Mal durchgeführt, wobei je-doch nun die berechneten Parameter x als neue Näherungs-werte x(0) für die Bildung der partiellen Ableitungen und der Absolutglieder verwendet werden.)
( )x x A PA A Pf= +−( ) T T0 1
Gl. 6.12-26
Gl. 6.12-27
Gl. 6.12-28
Gl. 6.12-29
( )x A PA A Pl=−T T1
F l l v( , , )x x xn1 2 K ≈ = +

Seite 36 6. Geodätische Statistik
Schritt 7 Berechnung der Varianz der Gewichtseinheit a posteriori s0
2
Schritt 8 Berechnung der Standardabweichungen und Kovarianzen Dazu muss zunächst die Kovarianzmatrix K(x) berechnet werden aus
Die Standardabweichung si des unbekannten Parameters xi beträgt
Hierbei ist
Kii(x) das i-te Diagonalelement aus der Kovarianzmatrix K(x)
Falls in einer bestimmten Beobachtungsgleichung F(x) mehr als nur ein unbekannter Parameter vorgekommen ist, sind diese in der Ausgleichung geschätzten Parameter nicht mehr unabhängig voneinander. Daher können auch Kovarianzen ungleich null zwischen den einzelnen Parametern vorliegen. Die Kovarianz zwischen dem Parameter xi und xk beträgt
Schritt 9 Zusammenstellung und Interpretation der Ergebnisse Zur Interpretation der Ergebnisse können nach Bedarf noch folgende Berechnungen durchgeführt werden, wie beispiels-weise:
− Berechnung der Korrelationen aus den Standardabwei-chungen und den Kovarianzen zwischen den einzelnen Parametern (vgl. Kap. 6.7.)
− Konfidenzintervalle bilden (vgl. Kap. 6.8.)
− Ηypothesentest durchführen (vgl. Kap. 6.8)
sn u0
2 1=
−v PvT
( )K x A PA( ) T=−
s02 1
( )s K xi ii= +
( )s s K xik ik= ⋅02
Gl. 6.12-30
Gl. 6.12-31
Gl. 6.12-32
Gl. 6.12-33

6.13 Beispiele zu den Kapiteln Seite 37
6.13 Beispiele zu den Kapiteln
6.13.1 Distanzmesserkalibrierung mit Interferometer
Berechnung der Standardabweichung bei bekanntem Sollwert. Hier: Distanz gemessen mit Interferometer
xw = µ = 27.1891 m
Die Interferometermessung wird als wahrer Wert ange-nommen, da diese Messung eine Grössenordnung ge-nauer ist als die Genauigkeit des Prüflings.
Es gibt also keine Unbekannten, da der Erwartungswert ja bekannt ist.
6.13.2 Standardabweichung bei Doppelmessungen
6.13.3 Distanzmessung: empirische Varianz und Standardabweichung
v = x - xi n = 8 Messungen u = 1 Unbekannte (x)
s = 0.44 [mm]
Beachte: Die Summe der vi muss bis auf Run-dungsfehler gleich Null sein. (Rechenkontrolle)
0.32[cm]σ
]cm[ 101.0908.091)x(
n1 n
1i
22i
2
=
=⋅=µ−=σ ∑=Tab. 6.4
sdn
=∑
⋅=
⋅=
2
26 492 4
0 9.
. [mgon]Tab. 6.5
Gl. 6.13-2
sv
n u2
2 1367
019=∑
−= =
.. [mm ]2 Gl. 6.13-3
Gl. 6.13-1
Messwerte ε = xi - m ε2
[m] [cm] [cm2]27.194 0.49 0.2427.187 -0.21 0.04427.183 -0.61 0.37227.190 0.09 0.00827.187 -0.21 0.04427.189 -0.01 027.193 0.39 0.15227.191 0.19 0.03627.188 -0.11 0.012
Σ: 244.702 0.01 0.908
1. Messung 2. Messung d d2
[gon] [gon] [mgon] [mgon2]107.4122 107.4130 0.8 0.6498.9195 98.9185 -1.0 1.00105.0614 105.0597 -1.7 2.8999.1012 99.1026 1.4 1.96
Σ = -0.5 Σ = 6.49
Messwerte xi - x v = x - xi v2
[m] [mm] [mm] [mm2]12.3876 0.6 -0.6 0.3612.3863 -0.7 0.7 0.4912.3866 -0.4 0.4 0.1612.3875 0.5 -0.5 0.2512.3869 -0.1 0.1 0.0112.3868 -0.2 0.2 0.0412.3872 0.2 -0.2 0.0412.3871 0.1 -0.1 0.01
x = 12.3870 Σ = 0.0 Σ = 0.0 Σ = 1.36
Tab. 6.6
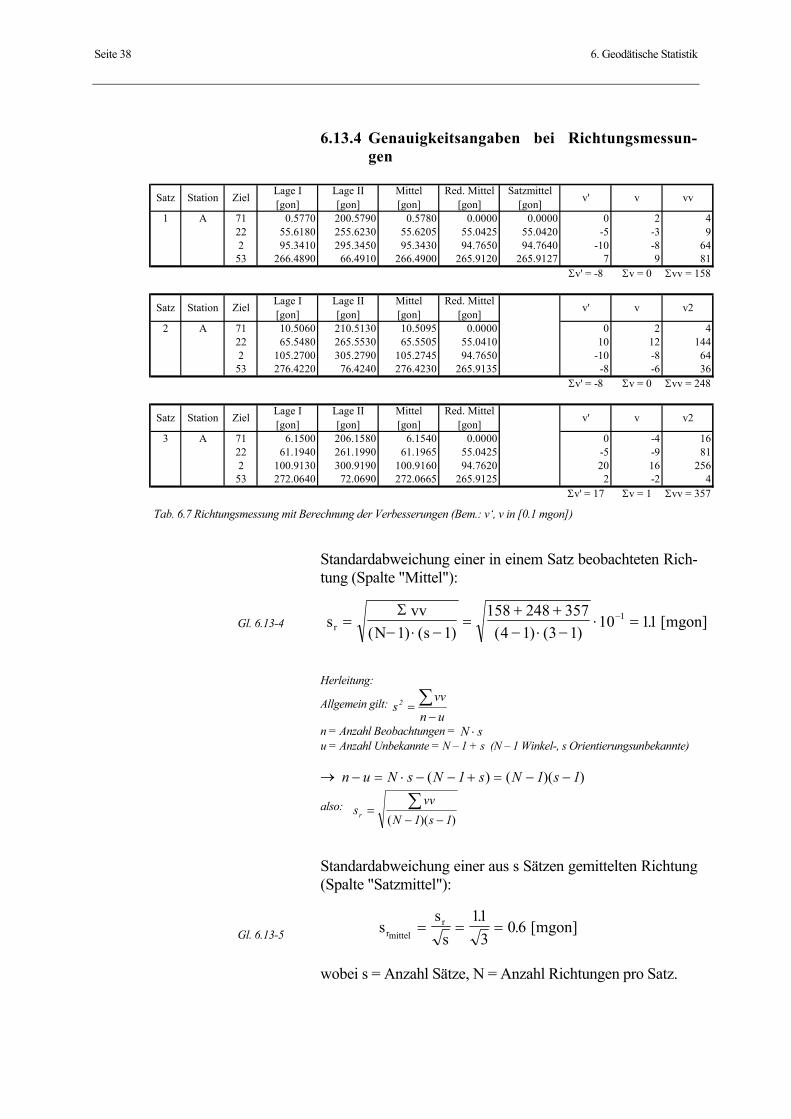
Seite 38 6. Geodätische Statistik
6.13.4 Genauigkeitsangaben bei Richtungsmessun-gen
Standardabweichung einer in einem Satz beobachteten Rich-tung (Spalte "Mittel"):
Herleitung:
Allgemein gilt: un
vvs2
−= ∑
n = Anzahl Beobachtungen = sN ⋅ u = Anzahl Unbekannte = N – 1 + s (N – 1 Winkel-, s Orientierungsunbekannte) → ))(()( 1s1Ns1NsNun −−=+−−⋅=−
also: ))(( 1s1N
vvsr −−
= ∑
Standardabweichung einer aus s Sätzen gemittelten Richtung (Spalte "Satzmittel"):
wobei s = Anzahl Sätze, N = Anzahl Richtungen pro Satz.
Tab. 6.7 Richtungsmessung mit Berechnung der Verbesserungen (Bem.: v‘, v in [0.1 mgon])
Gl. 6.13-4
sssrmittelr= = =
113
0 6.
. [mgon]Gl. 6.13-5
s
vvN sr =
− ⋅ − =
+ + − ⋅ −
⋅ = − Σ ( ) ( ) ( ) ( )
. 1 1
158 248 357 4 1 3 1
10 1 11 [mgon]
1 A 71 0.5770 200.5790 0.5780 0.0000 0.0000 0 2 422 55.6180 255.6230 55.6205 55.0425 55.0420 -5 -3 92 95.3410 295.3450 95.3430 94.7650 94.7640 -10 -8 64
53 266.4890 66.4910 266.4900 265.9120 265.9127 7 9 81Σv' = -8 Σv = 0 Σvv = 158
2 A 71 10.5060 210.5130 10.5095 0.0000 0 2 422 65.5480 265.5530 65.5505 55.0410 10 12 1442 105.2700 305.2790 105.2745 94.7650 -10 -8 64
53 276.4220 76.4240 276.4230 265.9135 -8 -6 36Σv' = -8 Σv = 0 Σvv = 248
3 A 71 6.1500 206.1580 6.1540 0.0000 0 -4 1622 61.1940 261.1990 61.1965 55.0425 -5 -9 812 100.9130 300.9190 100.9160 94.7620 20 16 256
53 272.0640 72.0690 272.0665 265.9125 2 -2 4Σv' = 17 Σv = 1 Σvv = 357
Satz Station Ziel Lage I [gon]
Lage II [gon]
Mittel [gon]
Red. Mittel [gon]
Satzmittel [gon] v' v vv
Satz Station Ziel Lage I [gon]
Lage II [gon]
Mittel [gon]
Red. Mittel [gon] v' v v2
Satz Station Ziel Lage I [gon] v' v v2Lage II
[gon]Mittel [gon]
Red. Mittel [gon]
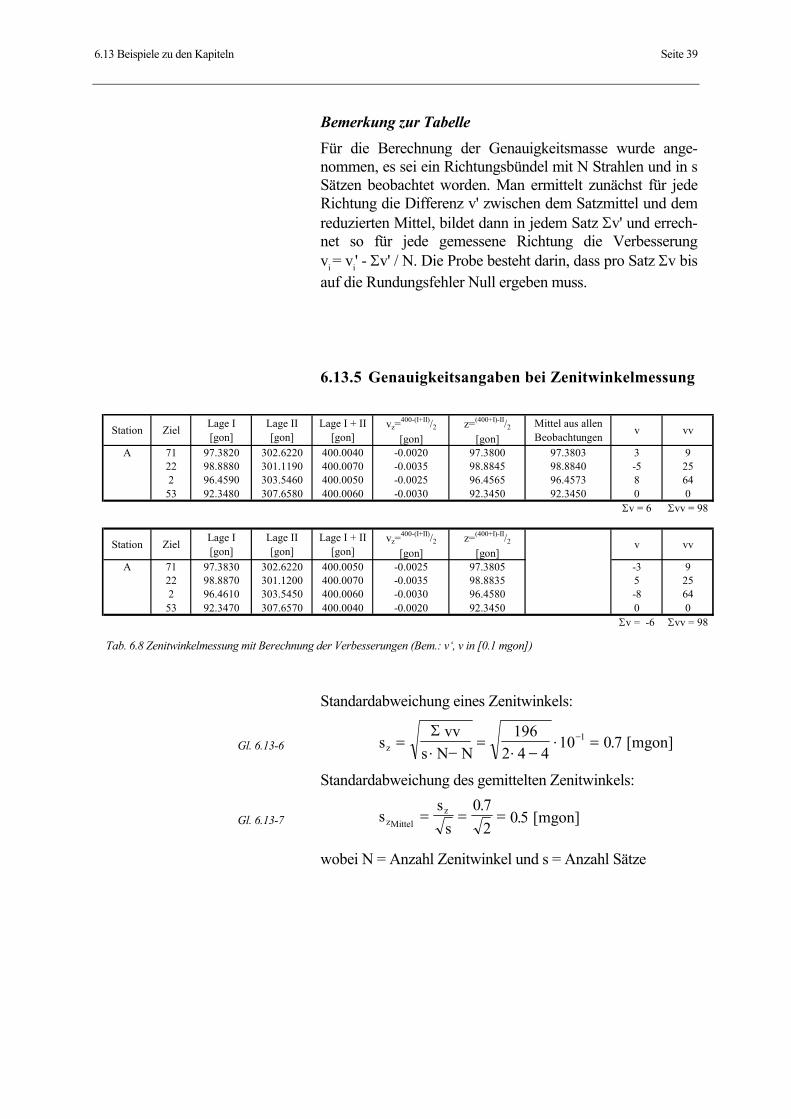
6.13 Beispiele zu den Kapiteln Seite 39
Bemerkung zur Tabelle Für die Berechnung der Genauigkeitsmasse wurde ange-nommen, es sei ein Richtungsbündel mit N Strahlen und in s Sätzen beobachtet worden. Man ermittelt zunächst für jede Richtung die Differenz v' zwischen dem Satzmittel und dem reduzierten Mittel, bildet dann in jedem Satz Σv' und errech-net so für jede gemessene Richtung die Verbesserung vi = vi' - Σv' / N. Die Probe besteht darin, dass pro Satz Σv bis auf die Rundungsfehler Null ergeben muss.
6.13.5 Genauigkeitsangaben bei Zenitwinkelmessung
Standardabweichung eines Zenitwinkels:
Standardabweichung des gemittelten Zenitwinkels:
wobei N = Anzahl Zenitwinkel und s = Anzahl Sätze
Tab. 6.8 Zenitwinkelmessung mit Berechnung der Verbesserungen (Bem.: v‘, v in [0.1 mgon])
Gl. 6.13-6
Gl. 6.13-7
s
vv
s N Nz = ⋅ −
= ⋅ −
⋅ = − Σ 196
2 4 4 10 0 7 1 . [mgon]
s
s
s zMittel
z= = = 0 7
2 0 5
. . [mgon]
Station Ziel Lage I [gon]
Lage II [gon]
Lage I + II [gon]
vz=400-(I+II)/2
[gon]z=(400+I)-II/2
[gon]Mittel aus allen Beobachtungen v vv
A 71 97.3820 302.6220 400.0040 -0.0020 97.3800 97.3803 3 922 98.8880 301.1190 400.0070 -0.0035 98.8845 98.8840 -5 252 96.4590 303.5460 400.0050 -0.0025 96.4565 96.4573 8 6453 92.3480 307.6580 400.0060 -0.0030 92.3450 92.3450 0 0
Σv = 6 Σvv = 98
Station Ziel Lage I [gon]
Lage II [gon]
Lage I + II [gon]
vz=400-(I+II)/2
[gon]z=(400+I)-II/2
[gon]v vv
A 71 97.3830 302.6220 400.0050 -0.0025 97.3805 -3 922 98.8870 301.1200 400.0070 -0.0035 98.8835 5 252 96.4610 303.5450 400.0060 -0.0030 96.4580 -8 6453 92.3470 307.6570 400.0040 -0.0020 92.3450 0 0
Σv = -6 Σvv = 98
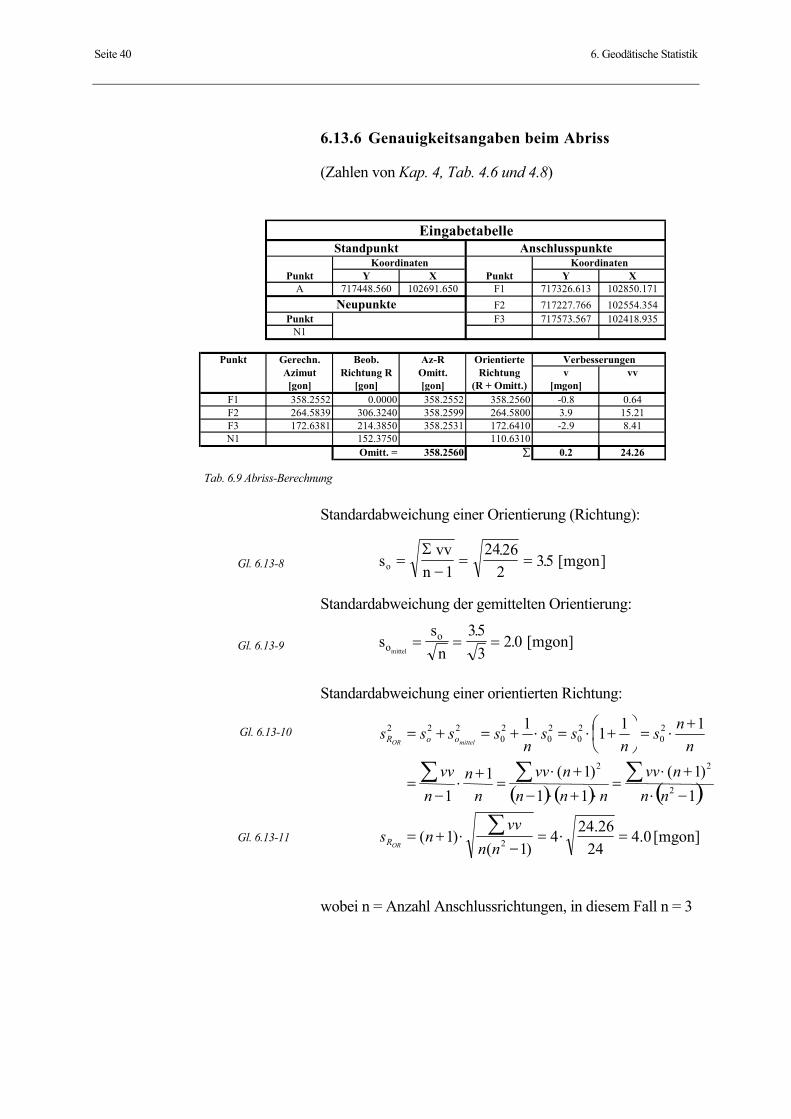
Seite 40 6. Geodätische Statistik
6.13.6 Genauigkeitsangaben beim Abriss
(Zahlen von Kap. 4, Tab. 4.6 und 4.8)
Standardabweichung einer Orientierung (Richtung):
Standardabweichung der gemittelten Orientierung:
Standardabweichung einer orientierten Richtung:
wobei n = Anzahl Anschlussrichtungen, in diesem Fall n = 3
Tab. 6.9 Abriss-Berechnung
ssnoo
mittel= = =
353
2 0.
. [mgon]
Gl. 6.13-8
Gl. 6.13-9
Gl. 6.13-10
Gl. 6.13-11
EingabetabelleStandpunkt Anschlusspunkte
Koordinaten KoordinatenPunkt Y X Punkt Y X
A 717448.560 102691.650 F1 717326.613 102850.171Neupunkte F2 717227.766 102554.354
Punkt F3 717573.567 102418.935N1
Punkt Gerechn. Beob. Az-R Orientierte VerbesserungenAzimut Richtung R Omitt. Richtung v vv[gon] [gon] [gon] (R + Omitt.) [mgon]
F1 358.2552 0.0000 358.2552 358.2560 -0.8 0.64F2 264.5839 306.3240 358.2599 264.5800 3.9 15.21F3 172.6381 214.3850 358.2531 172.6410 -2.9 8.41N1 152.3750 110.6310
Omitt. = 358.2560 ∑ 0.2 24.26
s
vvn
mgon o = −
= = Σ
12426
235
.. [ ]
( ) ( ) ( )
[mgon] 0 . 4 24
26 . 24 4 ) 1 (
) 1 (
1 ) 1 (
1 1 ) 1 ( 1
1
1 1 1 1
2
2
22
20
2 0
20
20
222
= ⋅ = −
⋅ + =
− ⋅ + ⋅
= ⋅ + ⋅ −
+ ⋅ = +
⋅ −
=
+ ⋅ =
+ ⋅ = ⋅ + = + =
∑
∑ ∑ ∑
n n vv
n s
n n n vv
n n n n vv
n n
n vv
n n s
n s s
n s s s s
OR
mittelOR
R
ooR
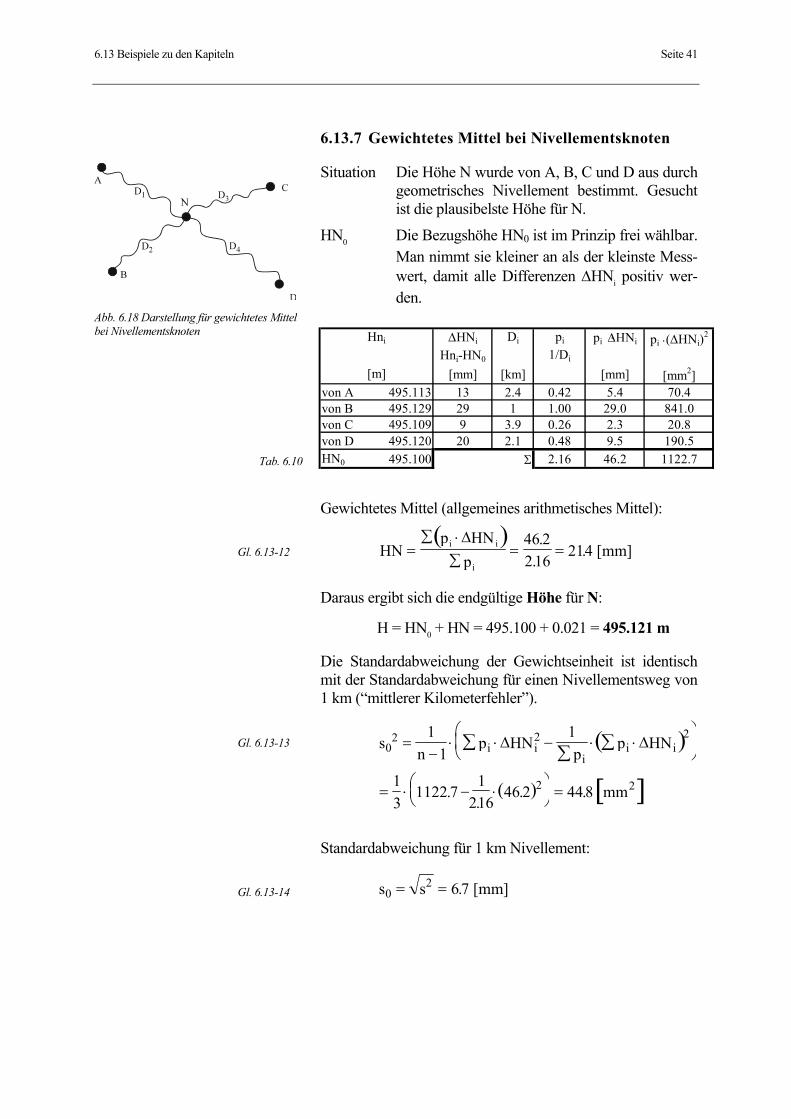
6.13 Beispiele zu den Kapiteln Seite 41
6.13.7 Gewichtetes Mittel bei Nivellementsknoten
Situation Die Höhe N wurde von A, B, C und D aus durch geometrisches Nivellement bestimmt. Gesucht ist die plausibelste Höhe für N.
HN0 Die Bezugshöhe HN0 ist im Prinzip frei wählbar. Man nimmt sie kleiner an als der kleinste Mess-wert, damit alle Differenzen ∆HNi positiv wer-den.
Gewichtetes Mittel (allgemeines arithmetisches Mittel):
Daraus ergibt sich die endgültige Höhe für N:
H = HN0 + HN = 495.100 + 0.021 = 495.121 m
Die Standardabweichung der Gewichtseinheit ist identisch mit der Standardabweichung für einen Nivellementsweg von 1 km (“mittlerer Kilometerfehler”).
Standardabweichung für 1 km Nivellement:
Abb. 6.18 Darstellung für gewichtetes Mittelbei Nivellementsknoten
Tab. 6.10
Gl. 6.13-12
Gl. 6.13-13
Gl. 6.13-14
∆HNi
Hni-HN0
Di pi
1/Di
pi ∆HNi pi (∆HNi)2
[mm] [km] [mm] [mm2]von A 495.113 13 2.4 0.42 5.4 70.4von B 495.129 29 1 1.00 29.0 841.0von C 495.109 9 3.9 0.26 2.3 20.8von D 495.120 20 2.1 0.48 9.5 190.5HN0 495.100 Σ 2.16 46.2 1122.7
Hni
[m]
⋅⋅
( )HN
p HN p
i i
i
= ⋅ ∑
∑ = =
∆ 46 2 2 16 21 4
. . . [mm]
( )
( ) [ ]
sn
p HNp
p HN
mm
i ii
i i02 2 2
2 2
11
1
13
1122 71
216 46 2 44 8
= −
⋅ ⋅ − ⋅ ⋅
= ⋅ − ⋅
=
∑ ∑ ∑ ∆ ∆
..
. .
s s02 6 7= = . [mm]
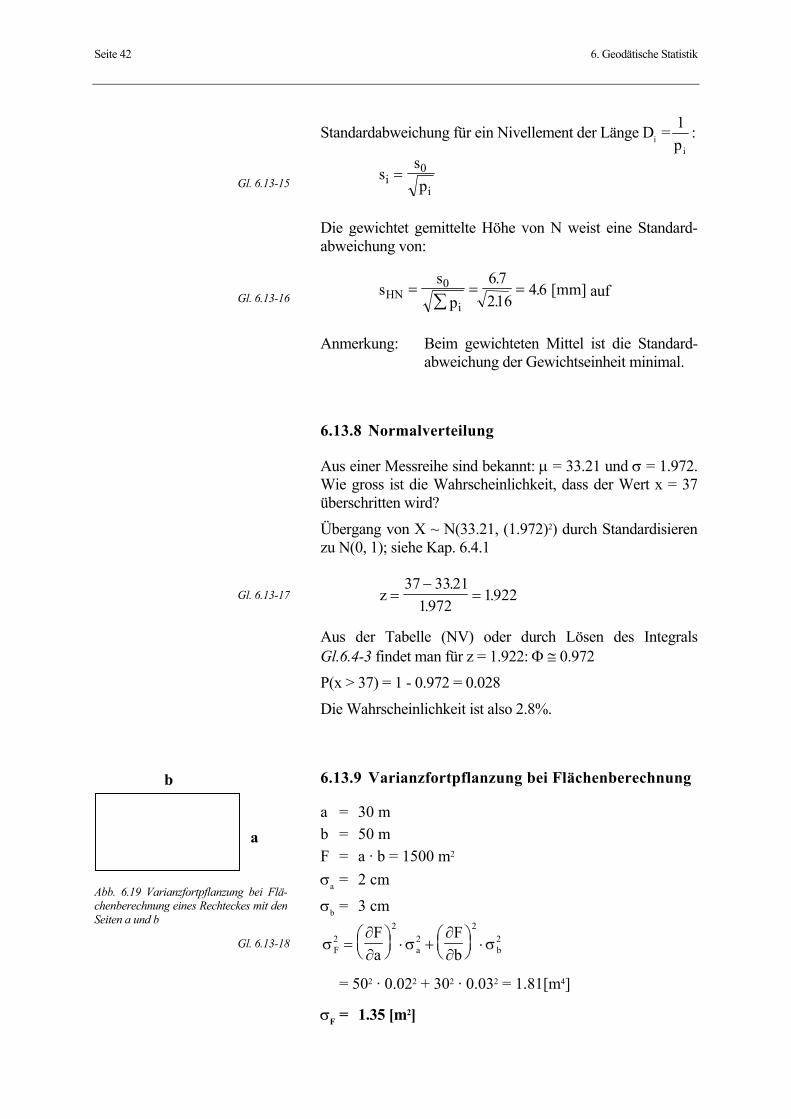
Seite 42 6. Geodätische Statistik
Standardabweichung für ein Nivellement der Länge Di =ip
1 :
Die gewichtet gemittelte Höhe von N weist eine Standard-abweichung von:
auf
Anmerkung: Beim gewichteten Mittel ist die Standard-abweichung der Gewichtseinheit minimal.
6.13.8 Normalverteilung
Aus einer Messreihe sind bekannt: µ = 33.21 und σ = 1.972. Wie gross ist die Wahrscheinlichkeit, dass der Wert x = 37 überschritten wird?
Übergang von X ~ N(33.21, (1.972)2) durch Standardisieren zu N(0, 1); siehe Kap. 6.4.1
Aus der Tabelle (NV) oder durch Lösen des Integrals Gl.6.4-3 findet man für z = 1.922: Φ ≅ 0.972
P(x > 37) = 1 - 0.972 = 0.028
Die Wahrscheinlichkeit ist also 2.8%.
6.13.9 Varianzfortpflanzung bei Flächenberechnung
a = 30 m b = 50 m F = a · b = 1500 m2 σa = 2 cm
σb = 3 cm
= 502 · 0.022 + 302 · 0.032 = 1.81[m4]
σF = 1.35 [m2]
Abb. 6.19 Varianzfortpflanzung bei Flä-chenberechnung eines Rechteckes mit denSeiten a und b
sspi
i= 0
Gl. 6.13-15
Gl. 6.13-16
z =−
=37 3321
19721922
..
.Gl. 6.13-17
σ∂∂
σ∂∂
σF a b
Fa
Fb
22
22
2=
⋅ +
⋅Gl. 6.13-18
b
a
s
spHN
i= = =
∑ 0 6 7
2164 6
..
. [mm]

6.13 Beispiele zu den Kapiteln Seite 43
6.13.10 Varianzfortpflanzung bei trigonometrischer Höhenbestimmung
dm meteokorrigierte Schrägdistanz z Zenitwinkel ∆h Höhenunterschied = dm· cos(z)
Daraus folgt, dass bei flachen Visuren die Genauigkeit der Streckenmessung für die Genauigkeit des Höhenunterschie-des eine untergeordnete Rolle spielt (cos2), die präzise Mes-sung des Zenitwinkels ist entscheidend. Umgekehrt wird bei nahezu vertikalen Visuren der Einfluss der Distanzmessge-nauigkeit bestimmend. Im Bereich schräger Visuren (50 gon) haben beide Messungen ungefähr den gleichen Einfluss auf die Standardabweichung.
6.13.11 Varianzberechnung beim Sinussatz (Länge einer Seite)
, Umformen zu:
ln(a) = ln(c) + ln(sin(α)) - ln(sin(γ)), davon wird das Diffe-rential gebildet:
Abb. 6.20 Trigonometrische Höhenbestimmung:dv wird aus ds und z bestimmt.
Gl. 6.13-19
Gl. 6.13-20
a c= ⋅sin( )sin( )
αγ
Gl. 6.13-21
Gl. 6.13-22
Gl. 6.13-23
Gl. 6.13-24
d∆h z dd d z
dz
z d z
m m
∆h d mz
m
= ⋅ − ⋅ ⋅
= ⋅ + ⋅ ⋅
cos( ) sin( )
cos ( ) sin ( )
ρ
σ σ σ ρ
2 2 2 2 22
∆h dm
( ) ( )
1 1
2 2 22
2 2
a da
cdc
d d
daac
dc ad
ad
ac
a a a c
⋅ = + ⋅ − ⋅
= + ⋅ ⋅ − ⋅ ⋅
=
⋅ + ⋅ ⋅
− ⋅ ⋅
cos( )sin( )
cos( )sin( )
cot( ) cot( )
cot( ) cot( )
α α
α ρ
γ γ
γ ρ
α α ρ
γ γ
ρ
σ σ α σ ρ
γ σ ρ
α γ2
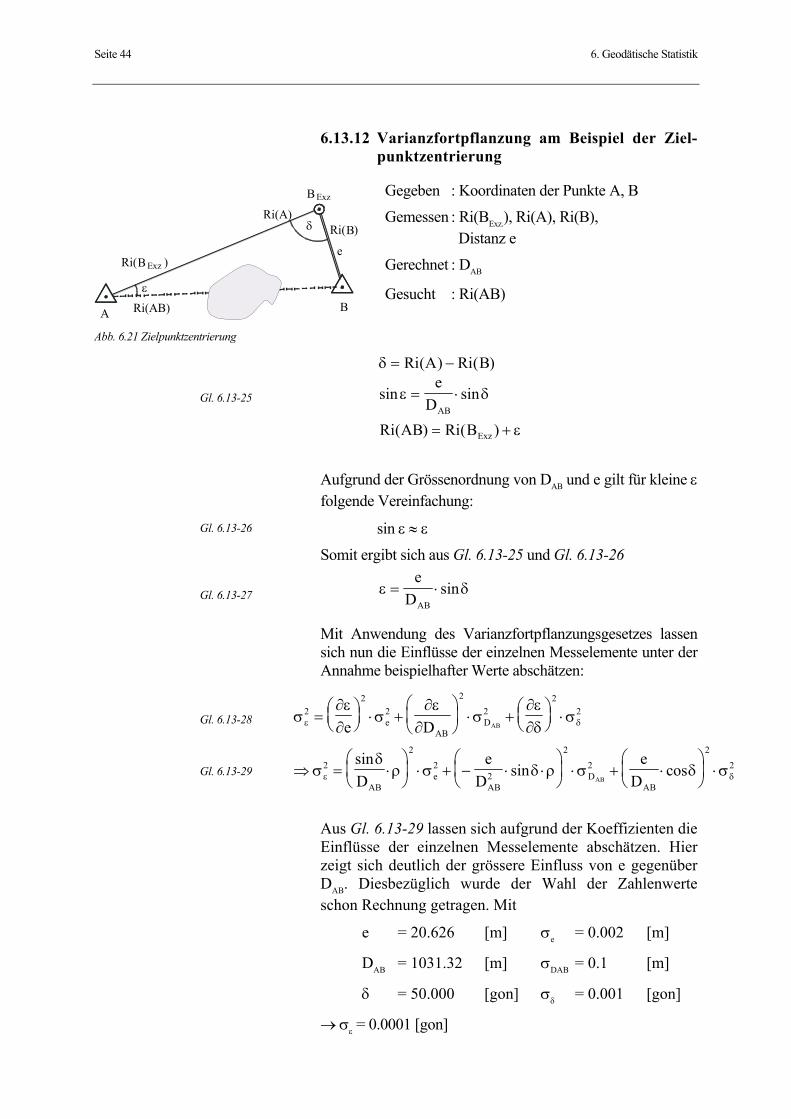
Seite 44 6. Geodätische Statistik
6.13.12 Varianzfortpflanzung am Beispiel der Ziel-punktzentrierung
Gegeben : Koordinaten der Punkte A, B
Gemessen : Ri(BExz.), Ri(A), Ri(B), Distanz e
Gerechnet : DAB
Gesucht : Ri(AB)
Aufgrund der Grössenordnung von DAB und e gilt für kleine ε folgende Vereinfachung:
sin ε ≈ ε
Somit ergibt sich aus Gl. 6.13-25 und Gl. 6.13-26
Mit Anwendung des Varianzfortpflanzungsgesetzes lassen sich nun die Einflüsse der einzelnen Messelemente unter der Annahme beispielhafter Werte abschätzen:
Aus Gl. 6.13-29 lassen sich aufgrund der Koeffizienten die Einflüsse der einzelnen Messelemente abschätzen. Hier zeigt sich deutlich der grössere Einfluss von e gegenüber DAB. Diesbezüglich wurde der Wahl der Zahlenwerte schon Rechnung getragen. Mit
e = 20.626 [m] σe = 0.002 [m]
DAB = 1031.32 [m] σDAB = 0.1 [m]
δ = 50.000 [gon] σδ = 0.001 [gon]
→ σε = 0.0001 [gon]
A Bε
δ
ExzB
eExzBRi( )
Ri(A)
Ri(AB)
BRi( )
δ = −Ri A Ri B( ) ( )
sin sinε δ= ⋅e
DAB
Ri AB Ri BExz( ) ( )= + ε
Abb. 6.21 Zielpunktzentrierung
Gl. 6.13-25
ε δ= ⋅e
DABsin
σ∂ε∂
σ∂ε
∂σ
∂ε∂δ
σ
σδ
ρ σ δ ρ σ δ σ
ε δ
ε δ
22
2
2
22
2
2
2
22
2
2
2
2
=
⋅ +
⋅ +
⋅
⇒ = ⋅
⋅ + − ⋅ ⋅
⋅ + ⋅
⋅
e D
De
De
D
eAB
D
ABe
ABD
AB
AB
AB
sinsin cos
Gl. 6.13-26
Gl. 6.13-27
Gl. 6.13-28
Gl. 6.13-29
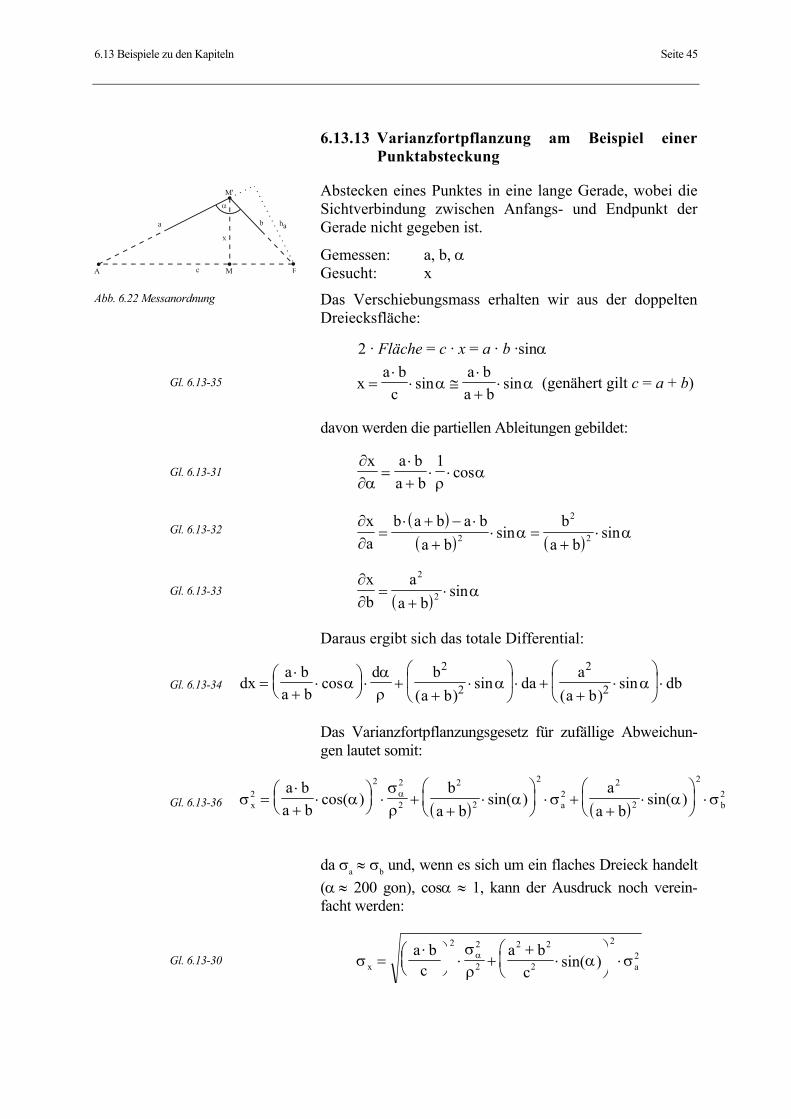
6.13 Beispiele zu den Kapiteln Seite 45
6.13.13 Varianzfortpflanzung am Beispiel einer Punktabsteckung
Abstecken eines Punktes in eine lange Gerade, wobei die Sichtverbindung zwischen Anfangs- und Endpunkt der Gerade nicht gegeben ist.
Gemessen: a, b, α Gesucht: x
Das Verschiebungsmass erhalten wir aus der doppelten Dreiecksfläche:
2 · Fläche = c · x = a · b ·sinα
(genähert gilt c = a + b)
davon werden die partiellen Ableitungen gebildet:
Daraus ergibt sich das totale Differential:
Das Varianzfortpflanzungsgesetz für zufällige Abweichun-gen lautet somit:
da σa ≈ σb und, wenn es sich um ein flaches Dreieck handelt (α ≈ 200 gon), cosα ≈ 1, kann der Ausdruck noch verein-facht werden:
Gl. 6.13-36
Gl. 6.13-34
xa b
ca ba b
=⋅
⋅ ≅⋅+
⋅sin sinα α
Abb. 6.22 Messanordnung
Gl. 6.13-35
∂∂α ρ
αx a b
a b=
⋅+
⋅ ⋅1
cos
( )( ) ( )
∂∂
α αxa
b a b a ba b
ba b
=⋅ + − ⋅
+⋅ =
+⋅2
2
2sin sin
( )∂∂
αxb
aa b
=+
⋅2
2 sin
dxa ba b
d ba b
daa
a bdb=
⋅+
⋅
⋅ +
+⋅
⋅ +
+⋅
⋅cos
( )sin
( )sinα
αρ
α α2
2
2
2
Gl. 6.13-31
Gl. 6.13-32
Gl. 6.13-33
( ) ( )σ ασρ
α σ α σαx a b
a ba b
ba b
aa b
22 2
2
2
2
22
2
2
22=
⋅+
⋅
⋅ +
+⋅
⋅ +
+⋅
⋅cos( ) sin( ) sin( )
Gl. 6.13-30
σ
σ ρ
α σ αx a
a b a bc
= ⋅ c
⋅ + +
⋅
⋅
2 2
2
2 2
2
2 2 sin( )

Seite 46 6. Geodätische Statistik
6.13.14 Varianzfortpflanzung beim Polygonzug (all-gemein)
Hier soll zwischen zwei Arten von Polygon-zügen unterschieden werden:
Beidseitig nach Koordinaten und Richtun-gen angeschlossener Zug, der somit “ge-zwängt” wird, und
Einseitig angeschlossener Zug, welcher nur im Anfangspunkt festgehalten wird, am Ende also unkontrolliert ist.
Beim einseitig angeschlossenen Zug wirkt sich jede Winkelabweichung direkt auf die folgenden Richtungen aus.
Wäre z.B. der erste Winkel um 1 mgon falsch und alle folgenden perfekt gemessen, so hätte man nach 640 m Polygonzug nur durch diesen Fehler schon eine Querabwei-chung von etwa 1 cm. Da nun jede folgende Winkelbestimmung auch mit einer gewissen Standardabweichung behaftet ist, wirkt sich dies für einen beliebigen offenen Polygon-zug folgendermassen aus:
Berechnung der Koordinaten eines Polygonpunktes:
Azj : Azimut von Pkt j-1 zu Pkt j = Az0 + Σαk - i ⋅ 200 gon
Dj : Seitenlänge Pkt j-1 zu Pkt j
x0, y0 : Koordinaten des ersten Punktes
αk : Brechungswinkel (k = 1 ... j)
Abb. 6.23 Gestreckter, gezwängter Polygonzug mit konstantenSeitenlängen
Abb. 6.24 Beliebiger, offener Polygonzug. Wie gross ist dieStandardabweichung im letzten Punkt?
x x D Azi j jj
i= + ⋅∑
=0
1cos
Gl. 6.13-37
Gl. 6.13-38
y y D Azi jj
i
j= + ⋅∑=
01
sin
Im Kap. 6.13.15 ist die Varianzfort-pflanzung am Beispiel des offenenZuges im Detail beschrieben.

6.13 Beispiele zu den Kapiteln Seite 47
Daraus folgt für die Fehlerfortpflanzung:
- Einfluss der Längenmessungen
- Einfluss der Winkel
- Aufaddieren der Varianzen für den Punkt m
Abb. 6.25 soll die unterschiedliche Charakteristik von offe-nen und geschlossenen Polygonzügen veranschaulichen.
Daraus folgt für die Standardabweichung in Querrichtung:
- Beim gezwängten Zug (siehe Kap. 4.3.1.4) ist die Stan-dardabweichung in der Zugsmitte maximal.
- Beim offenen Zug (siehe Kap. 4.3.1.2) ist die Standard-abweichung am freien Zugsende maximal. Die Zunahme erfolgt mit der 1.5-fachen Potenz der Anzahl Polygonsei-ten n (siehe Gl. 6.13.-60).
∂∂
σ σyD
Azi
jD D j= ⋅sin
∂∂
σ σxD
Azi
jD D j= ⋅cos
∂∂α
σρ
σρ
α αyD Azi
jk k
k j
i= ⋅ ⋅∑
=cos
∂∂α
σρ
σρ
α αxD Azi
jk k
k j
i= ⋅ ⋅∑
=sin
σ∂∂
σ∂∂α
σρ
αx
m
jD
j
mm
jj
mxD
x2
2
1
2
1= ⋅
∑ + ⋅
∑
= =
σ∂∂
σ∂∂α
σρ
αy
m
jD
j
mm
jj
myD
y2
2
1
2
1= ⋅
∑ + ⋅
∑
= =
Gl. 6.13-39
Gl. 6.13-40
Gl. 6.13-41
Gl. 6.13-42
Gl. 6.13-43
Gl. 6.13-44
Abb. 6.25 Verhalten in Quer- (links) und Längsrichtung(rechts) eines offenen (gestrichelt) und eines einge-zwängten Polygonzuges (ausgezogen), siehe Kap.4.3.1.4, mit 10 Punkten inkl. Beginn- und Endpunkt
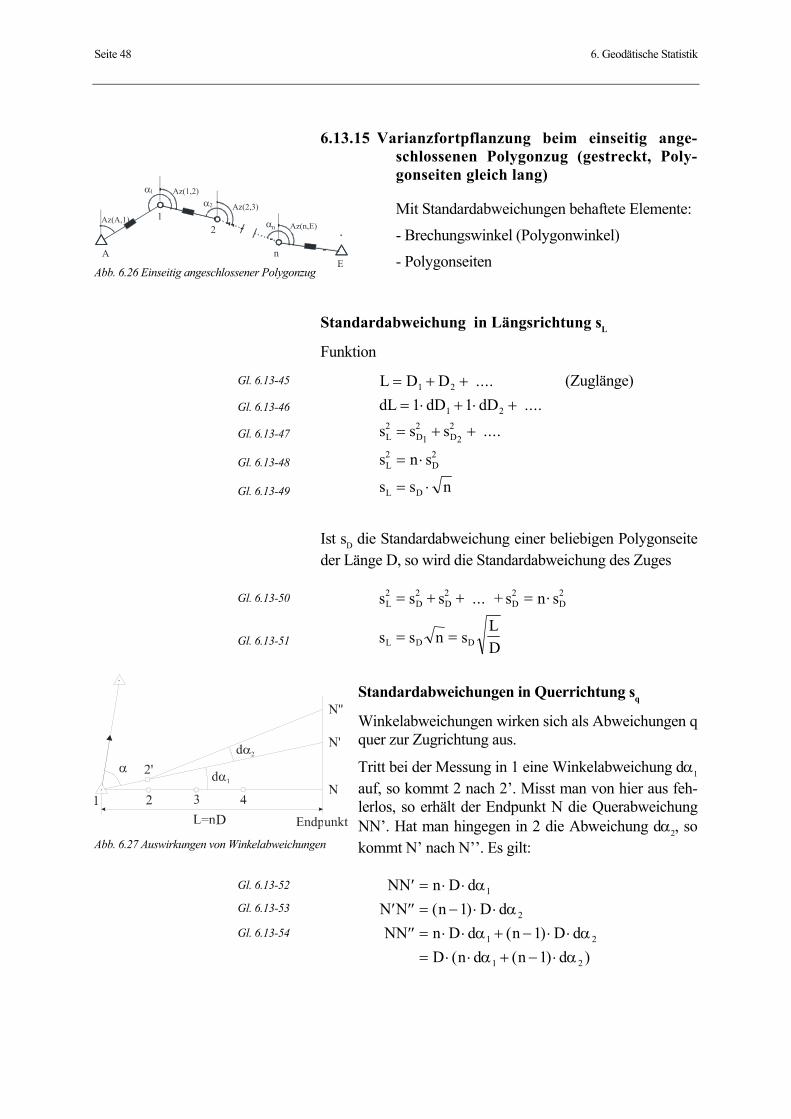
Seite 48 6. Geodätische Statistik
6.13.15 Varianzfortpflanzung beim einseitig ange-schlossenen Polygonzug (gestreckt, Poly-gonseiten gleich lang)
Mit Standardabweichungen behaftete Elemente:
- Brechungswinkel (Polygonwinkel)
- Polygonseiten
Standardabweichung in Längsrichtung sL
Funktion
(Zuglänge)
Ist sD die Standardabweichung einer beliebigen Polygonseite der Länge D, so wird die Standardabweichung des Zuges
Standardabweichungen in Querrichtung sq
Winkelabweichungen wirken sich als Abweichungen q quer zur Zugrichtung aus.
Tritt bei der Messung in 1 eine Winkelabweichung dα1 auf, so kommt 2 nach 2’. Misst man von hier aus feh-lerlos, so erhält der Endpunkt N die Querabweichung NN’. Hat man hingegen in 2 die Abweichung dα2, so kommt N’ nach N’’. Es gilt:
L D DdL dD dDs s s
n s
s s n
L D D
D
L D
= + += ⋅ + ⋅ +
= + +
= ⋅
= ⋅
1 2
1 22
12
22
2
1 1 ....
.... ....
sL2
Gl. 6.13-45
Gl. 6.13-46
Gl. 6.13-47
Gl. 6.13-48
Gl. 6.13-49
Gl. 6.13-50
Gl. 6.13-51
Abb. 6.27 Auswirkungen von Winkelabweichungen
s s s s n s
s s n sLD
L D D D D
L D D
2 2 2 2 2= + + = ⋅
= =
... +
A
1
α1
α2
2
E
Az(A,1)
Az(1,2)
Az(2,3)
Az(n,E)αn
n
Abb. 6.26 Einseitig angeschlossener Polygonzug
D
NN n D dN N n D dNN n D d n D d
D n d n d
′ = ⋅ ⋅′ ′′ = − ⋅ ⋅
′′ = ⋅ ⋅ + − ⋅ ⋅= ⋅ ⋅ + − ⋅
αα
α αα α
1
2
1 2
1 2
111
( )( )
( ( ) )
Gl. 6.13-52
Gl. 6.13-53
Gl. 6.13-54
6.13 Beispiele zu den Kapiteln Seite 49
Oder wenn auf allen Punkten Winkelabweichungen dα1, dα2, ...., dαn-1 auftreten (Gesamteinfluss):
Unter Verwendung des Varianzfortpflanzungsgesetzes
folgt aus dem Gesamteinfluss die Varianz der Querrichtung im Endpunkt:
Da die Standardabweichungen der Polygonwinkel alle gleich sα sind, wird
Die Formel ist für alle praktisch vorkommenden n bequem.
Zur Beurteilung der Varianzfortpflanzung im Allgemeinen ersetzen wir den Klammerausdruck nach der Theorie der arithmetischen Reihen durch
Berücksichtigt man nur das Hauptglied, so wird mit
und mit
folgt
Σ: ( ( ) ( ) )( ) NN .... + 2d n-2n
nD nd n d n d d= + − + − + + −α α α α α1 2 3 11 2Gl. 6.13-55
Gl. 6.13-56
( )s s D n s D iq
n= ⋅ ⋅ + + + = ⋅ ⋅ ∑α α
2 2 2 2 2 2 2 2
11 2 .... + (n -1)2
Gl. 6.13-57
Gl. 6.13-58
Gl. 6.13-59 in n n
nn n
n n n
n2
1
2 23 2
2
1 23 2 6
62 3 1
2 1 16
∑ = + + = + +
= + + =+ +
.... + n2
( )( )( )
s D n s D n s D n s D s D s q αn-2 αn-1
2 2 2α1 2 2 2
α2
2 2α3 2 2 2 2 21 2 = + − + − + + ( ) ( ) . . .+2 2
s
Fx
sFx
sF x
s Fn αn
2
1
2
α1
2
2
2
α2 2
2 2=
⋅ +
⋅ + +
⋅
∂ ∂
∂ ∂
∂ ∂ . . .
s s Dn
s D nq ≅ ⋅ ⋅ = ⋅ ⋅ ⋅α α
31 5
313
.
nLD
=
ss L
Ds L L
Ds L
nq ≅ ≅ ≅α α
α3 3 3
3
Gl. 6.13-60
Gl. 6.13-61
Gl. 6.13-62
Seite 50 6. Geodätische Statistik
Dies ist eine Näherungsformel, weil in der Praxis die Vor-aussetzungen (gestreckt, gleich lange Seiten, etc.) nie exakt eingehalten werden können.
Auf analoge Weise können auch weitere Näherungsformeln für die Standardabweichung in Querrichtung bei Polygon-punkten abgeleitet werden (siehe Tab. 6.11).
Annahmen: für alle Fälle des Polygonzug-Anschlusses: gestreckter Zug, gleiche Seitenlängen D, Anzahl Seiten n, Gesamtlänge L = n ⋅ D, alle Winkel gleich genau gemessen mit Standard-abweichung sα.
Standardabweichung eines Po-lygonpunktes in Querrichtung
Anschluss in Zugmitte sqM
am Zugende sqE
Einseitig angeschlossener Polygonzug siehe Kap. 4.3.1.2 24
nsL
ρα⋅
3ns
Lρα⋅
Beidseitig nach Koordinaten und Richtungen an-geschlossener Polygonzug siehe Kap. 4.3.1.4 192
nsL
ρα⋅
fix = 0
Tab. 6.11 Standardabweichung eines Polygonzuges in Querrichtung
Um eine hohe Genauigkeit zu erzielen, sollten möglichst wenige Poly-gonpunkte, d.h. lange Zugseiten, gewählt werden, denn der Querfehlerwächst mit der Quadratwurzel aus der Anzahl der Brechpunkte.
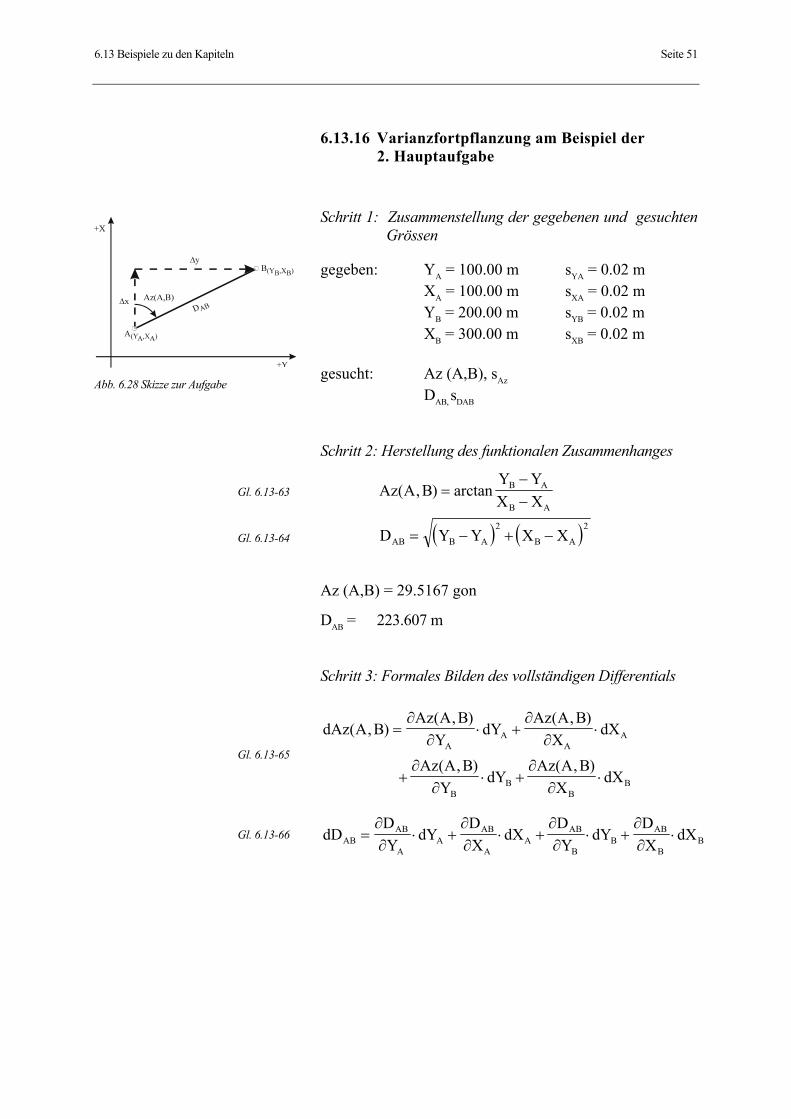
6.13 Beispiele zu den Kapiteln Seite 51
6.13.16 Varianzfortpflanzung am Beispiel der 2. Hauptaufgabe
Schritt 1: Zusammenstellung der gegebenen und gesuchten Grössen
gegeben: YA = 100.00 m sYA = 0.02 m XA = 100.00 m sXA = 0.02 m YB = 200.00 m sYB = 0.02 m XB = 300.00 m sXB = 0.02 m gesucht: Az (A,B), sAz DAB, sDAB
Schritt 2: Herstellung des funktionalen Zusammenhanges
Az (A,B) = 29.5167 gon
DAB = 223.607 m
Schritt 3: Formales Bilden des vollständigen Differentials
Abb. 6.28 Skizze zur Aufgabe
( ) ( )
Az A BY YX X
D Y Y X X
B A
B A
AB B A B A
( , ) arctan=−−
= − + −2 2
Gl. 6.13-63
Gl. 6.13-64
dAz A BAz A B
YdY
Az A BX
dXA
AA
A( , )( , ) ( , )
= ⋅ + ⋅∂
∂∂
∂
+ ⋅ + ⋅∂
∂∂
∂Az A B
YdY
Az A BX
dXB
BB
B
( , ) ( , )
dDDY
dYDX
dXDY
dYDX
dXABAB
AA
AB
AA
AB
BB
AB
BB= ⋅ + ⋅ + ⋅ + ⋅
∂∂
∂∂
∂∂
∂∂
Gl. 6.13-65
Gl. 6.13-66
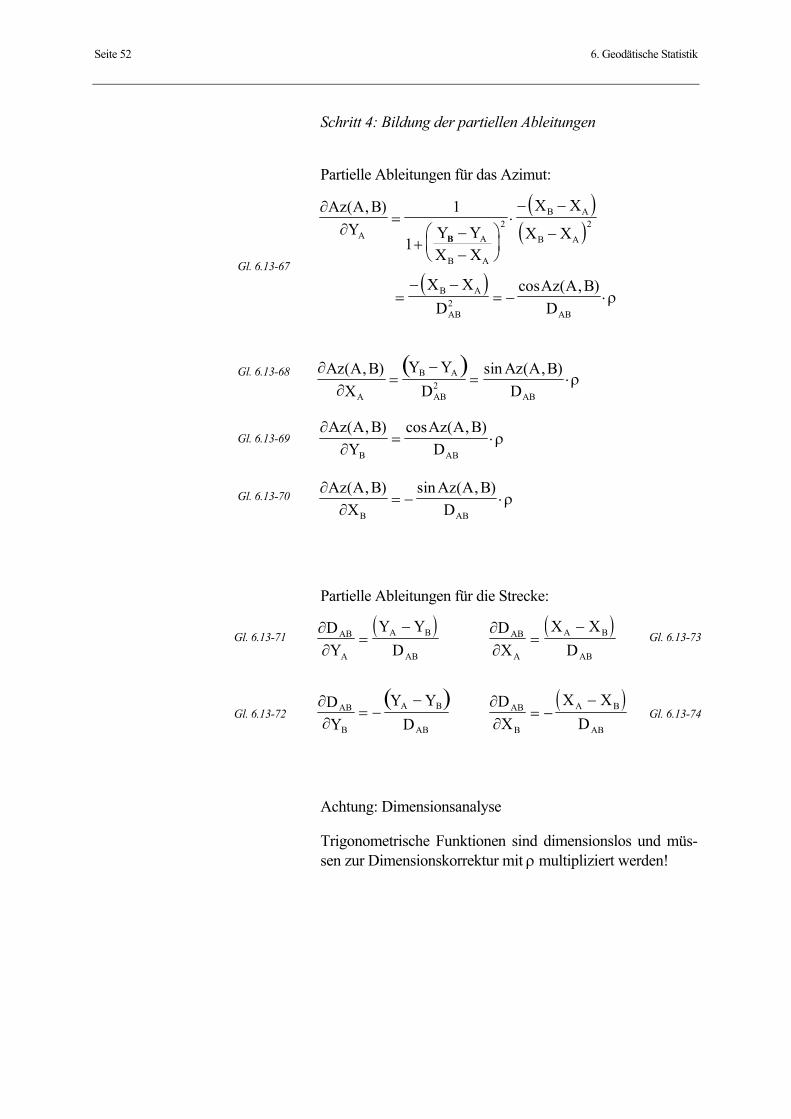
Seite 52 6. Geodätische Statistik
Schritt 4: Bildung der partiellen Ableitungen
Partielle Ableitungen für das Azimut:
Partielle Ableitungen für die Strecke:
Achtung: Dimensionsanalyse
Trigonometrische Funktionen sind dimensionslos und müs-sen zur Dimensionskorrektur mit ρ multipliziert werden!
( )( )
( )
∂∂
ρ
Az A BY Y Y
X X
X X
X X
X XD
Az A BD
A A
B A
B A
B A
B A
AB AB
( , )
cos ( , )
=
+−−
⋅− −
−
=− −
= − ⋅
1
12 2
2
B
∂∂
ρAz A B
YAz A BDB AB
( , ) cos ( , )= ⋅
∂∂
ρAz A B
XAz A BDB AB
( , ) sin ( , )= − ⋅
Gl. 6.13-67
Gl. 6.13-68
Gl. 6.13-69
Gl. 6.13-70
( )∂∂DY
Y YD
AB
A
A B
AB=
− ( )∂∂DX
X XD
AB
A
A B
AB=
−
( )∂∂DX
X XD
AB
B
A B
AB= −
−
Gl. 6.13-71 Gl. 6.13-73
Gl. 6.13-72 Gl. 6.13-74
( )∂∂
ρAz A B
XY Y
DAz A BDA
B A
AB AB
( , ) sin ( , )=
−= ⋅2
( )∂ ∂ D Y
Y Y D
AB
B
A B
AB
= − −
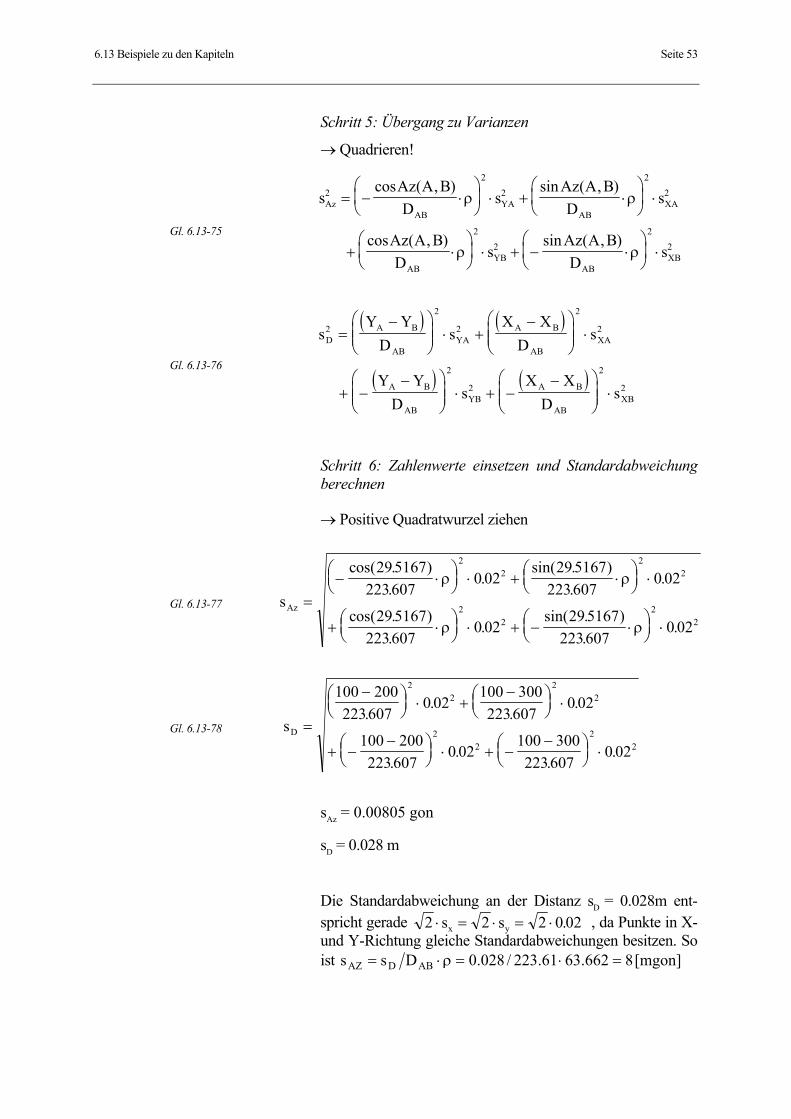
6.13 Beispiele zu den Kapiteln Seite 53
Schritt 5: Übergang zu Varianzen
→ Quadrieren!
Schritt 6: Zahlenwerte einsetzen und Standardabweichung berechnen
→ Positive Quadratwurzel ziehen
sAz = 0.00805 gon
sD = 0.028 m
Die Standardabweichung an der Distanz sD = 0.028m ent-spricht gerade , da Punkte in X- und Y-Richtung gleiche Standardabweichungen besitzen. So ist [mgon] 8662.6361.223/028.0Dss ABDAZ =⋅=ρ⋅=
sAz A BD
sAz A BD
s
Az A BD
sAz A BD
s
AzAB
YAAB
XA
ABYB
ABXB
2
2
2
2
2
2
2
2
2
= − ⋅
⋅ + ⋅
⋅
+ ⋅
⋅ + − ⋅
⋅
cos ( , ) sin ( , )
cos ( , ) sin ( , )
ρ ρ
ρ ρ
( ) ( )
( ) ( )
sY Y
Ds
X XD
s
Y YD
sX X
Ds
DA B
ABYA
A B
ABXA
A B
ABYB
A B
ABXB
2
2
2
2
2
2
2
2
2
=−
⋅ +
−
⋅
+ −−
⋅ + −
−
⋅
Gl. 6.13-75
Gl. 6.13-76
sAz =− ⋅
⋅ + ⋅
⋅
+ ⋅
⋅ + − ⋅
⋅
cos( . ).
.sin( . )
..
cos( . ).
.sin( . )
..
29 5167223607
0 0229 5167
2236070 02
29 5167223607
0 0229 5167
2236070 02
22
22
22
22
ρ ρ
ρ ρ
sD =
−
⋅ +
−
⋅
+ −−
⋅ + −
−
⋅
100 200223607
0 02100 300223607
0 02
100 200223607
0 02100 300223607
0 02
22
22
22
22
..
..
..
..
Gl. 6.13-77
Gl. 6.13-78
2 2 2 0 02⋅ = ⋅ = ⋅s sx y .
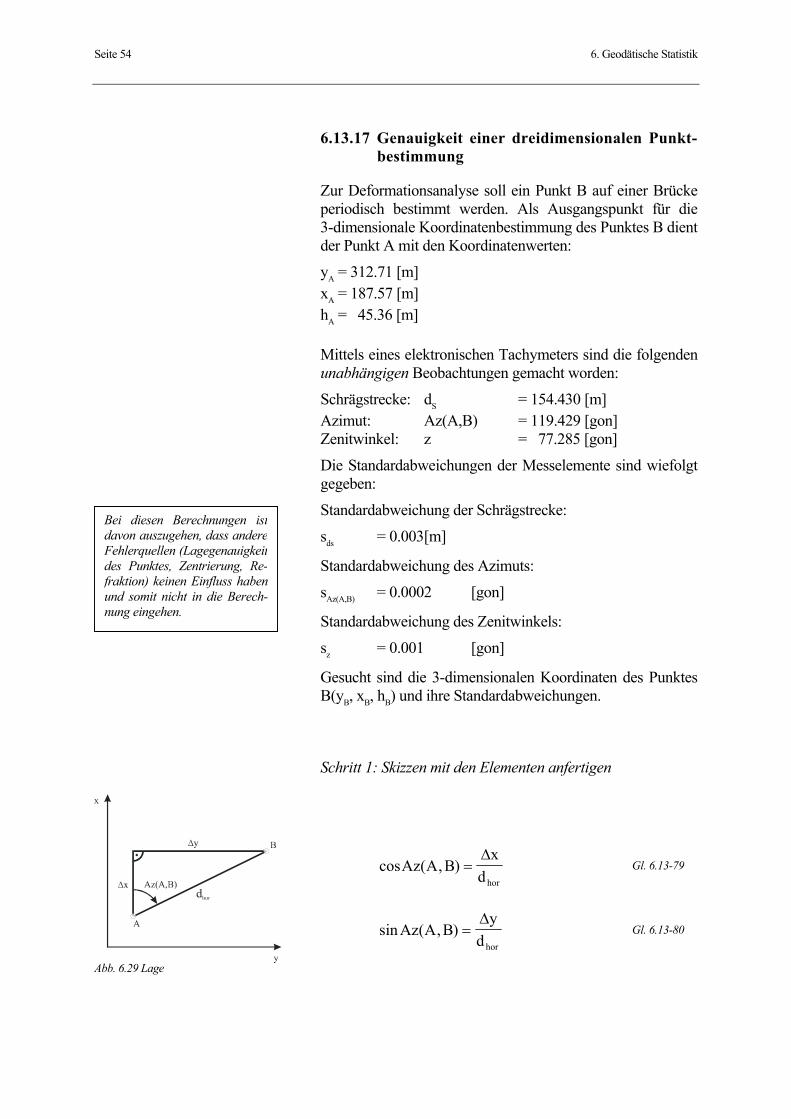
Seite 54 6. Geodätische Statistik
6.13.17 Genauigkeit einer dreidimensionalen Punkt-bestimmung
Zur Deformationsanalyse soll ein Punkt B auf einer Brücke periodisch bestimmt werden. Als Ausgangspunkt für die 3-dimensionale Koordinatenbestimmung des Punktes B dient der Punkt A mit den Koordinatenwerten:
yA = 312.71 [m] xA = 187.57 [m] hA = 45.36 [m] Mittels eines elektronischen Tachymeters sind die folgenden unabhängigen Beobachtungen gemacht worden:
Schrägstrecke: dS = 154.430 [m] Azimut: Az(A,B) = 119.429 [gon] Zenitwinkel: z = 77.285 [gon]
Die Standardabweichungen der Messelemente sind wiefolgt gegeben:
Standardabweichung der Schrägstrecke:
sds = 0.003 [m]
Standardabweichung des Azimuts:
sAz(A,B) = 0.0002 [gon]
Standardabweichung des Zenitwinkels:
sz = 0.001 [gon]
Gesucht sind die 3-dimensionalen Koordinaten des Punktes B(yB, xB, hB) und ihre Standardabweichungen.
Schritt 1: Skizzen mit den Elementen anfertigen
cos ( , )Az A Bx
dhor=
∆
sin ( , )Az A By
dhor=
∆
Abb. 6.29 Lage
Gl. 6.13-79
Gl. 6.13-80
Bei diesen Berechnungen istdavon auszugehen, dass andereFehlerquellen (Lagegenauigkeitdes Punktes, Zentrierung, Re-fraktion) keinen Einfluss habenund somit nicht in die Berech-nung eingehen.
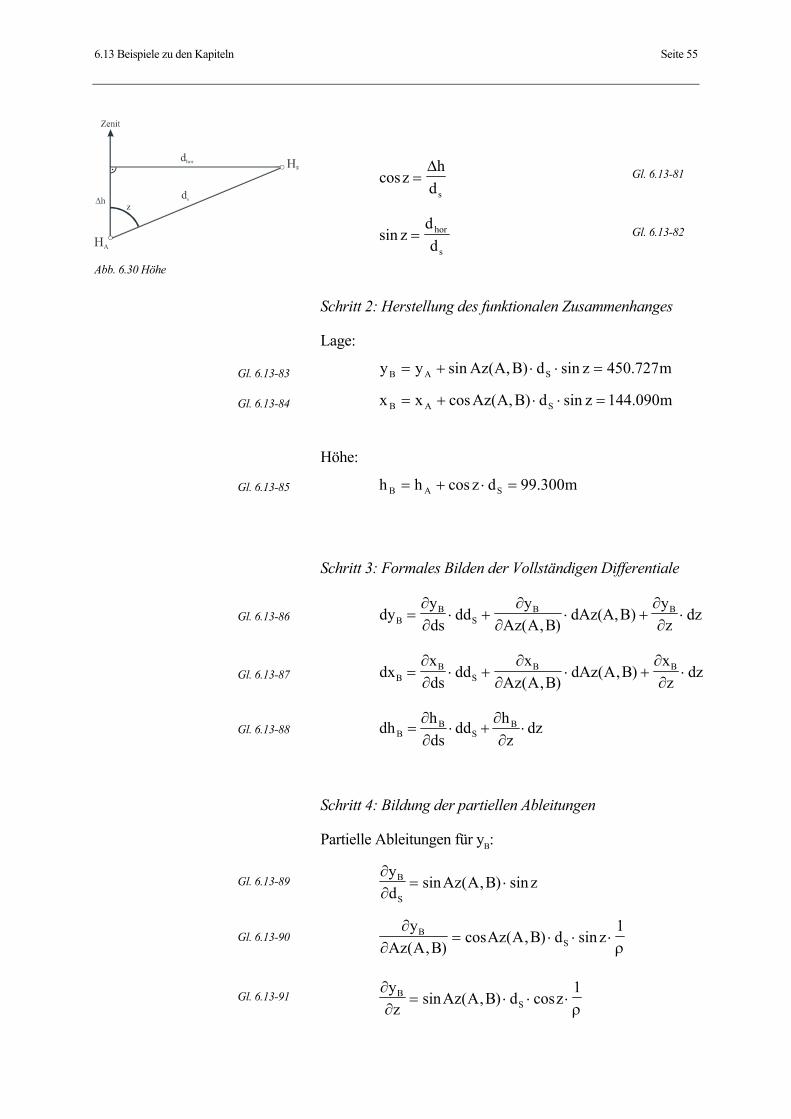
6.13 Beispiele zu den Kapiteln Seite 55
Schritt 2: Herstellung des funktionalen Zusammenhanges
Lage:
m727.450zsind)B,A(Azsinyy SAB =⋅⋅+=
m090.144zsind)B,A(Azcosxx SAB =⋅⋅+=
Höhe:
m300.99dzcoshh SAB =⋅+=
Schritt 3: Formales Bilden der Vollständigen Differentiale
Schritt 4: Bildung der partiellen Ableitungen
Partielle Ableitungen für yB:
Gl. 6.13-83
Gl. 6.13-84
Gl. 6.13-85
dyds
dd dAz(A,B)yz
dzB SB= ⋅ + ⋅ + ⋅
∂∂
∂∂
∂∂
y yAz A B
B B
( , )
dxxds
ddx
Az A BdAz A B
xz
dzBB
SB B= ⋅ + ⋅ + ⋅
∂∂
∂∂
∂∂( , )
( , )
dzz
hdddshdh B
SB
B ⋅∂
∂+⋅
∂∂
=
Gl. 6.13-86
Gl. 6.13-87
Gl. 6.13-88
∂∂yd
Az A B zB
S= ⋅sin ( , ) sin
∂∂ ρ
yAz A B
Az A B d zBS( , )
cos ( , ) sin= ⋅ ⋅ ⋅1
∂∂ ρyz
Az A B d zBS= ⋅ ⋅ ⋅sin ( , ) cos
1
Gl. 6.13-89
Gl. 6.13-90
Gl. 6.13-91
Gl. 6.13-81
Abb. 6.30 Höhe
coszh
ds=
∆
sin zddhor
s= Gl. 6.13-82
Seite 56 6. Geodätische Statistik
Partielle Ableitungen für xB:
Partielle Ableitungen für hB:
Schritt 5: Dimensionsanalyse
Trigonometrische Funktionen sind dimensionslos und müs-sen deshalb mit ρ korrigiert (dividiert/multipliziert) werden!
→ Quadrieren!
∂∂xd
Az A B zB
S= ⋅cos ( , ) sin
∂∂ ρ
xAz A B
Az A B d zBS( , )
sin ( , ) sin= − ⋅ ⋅ ⋅1
∂∂ ρxz
Az A B d zBS= ⋅ ⋅ ⋅cos ( , ) cos
1
Gl. 6.13-93
Gl. 6.13-94
∂∂hds
zB = cos
∂∂ ρhz
z dBS= − ⋅ ⋅sin
1
Gl. 6.13-95
Gl. 6.13-96
syds
sy
Az A Bs
yz
syB
dsB
AzB
z2
22
22
22=
⋅ +
⋅ +
⋅
∂∂
∂∂
∂∂( , )
sxds
sx
Az A Bs
xz
sxB
dsB
AzB
z2
22
22
22=
⋅ +
⋅ +
⋅
∂∂
∂∂
∂∂( , )
2z
2B2
ds
2B2
h sz
hsdshs ⋅
∂∂
+⋅
∂∂
=
Gl. 6.13-97
Gl. 6.13-98
Gl. 6.13-99
Gl. 6.13-92

6.13 Beispiele zu den Kapiteln Seite 57
Schritt 6: Standardabweichung berechnen
→ Positive Quadratwurzel ziehen
Schritt 7: Ergebnisse darstellen und interpretieren!
yB = 450.73 m sy = 2.8 mm
xB = 144.09 m sx = 1.0 mm
hB = 99.30 m sh = 2.5 mm
( )
s
Az A B z s
Az A B d z s
Az A B d z s
y
ds
S Az
S z
=
⋅ ⋅
+ ⋅ ⋅ ⋅
⋅
+ ⋅ ⋅ ⋅
⋅
sin ( , ) sin
cos ( , ) sin
sin ( , ) cos
2 2
22
22
1
1
ρ
ρ
( )
s
Az A B z s
Az A B d z s
Az A B d z s
x
ds
S Az
S z
=
⋅ ⋅
+ − ⋅ ⋅ ⋅
⋅
+ ⋅ ⋅ ⋅
⋅
cos ( , ) sin
sin ( , ) sin
cos ( , ) cos
2 2
22
22
1
1
ρ
ρ
( )s z s z d sh ds S z= ⋅ + − ⋅ ⋅
⋅cos sin2 2
221
ρ
Gl. 6.13-100
Gl. 6.13-101
Gl. 6.13-102
s m
s m
s m
y
x
h
= ⋅ + + = ⋅ =
= ⋅ + + = ⋅ ≅
= ⋅ + = ⋅ =
− −
− −
− −
10 7 2 0 0187 0 65 2 8 10 2 8
10 0 71 0 19 0 065 0 98 10 1
10 1 1 5 2 2 5 10 2 5
3 3
3 3
3 3
. . . . .
. . . .
. . . .
mm
mm
mm
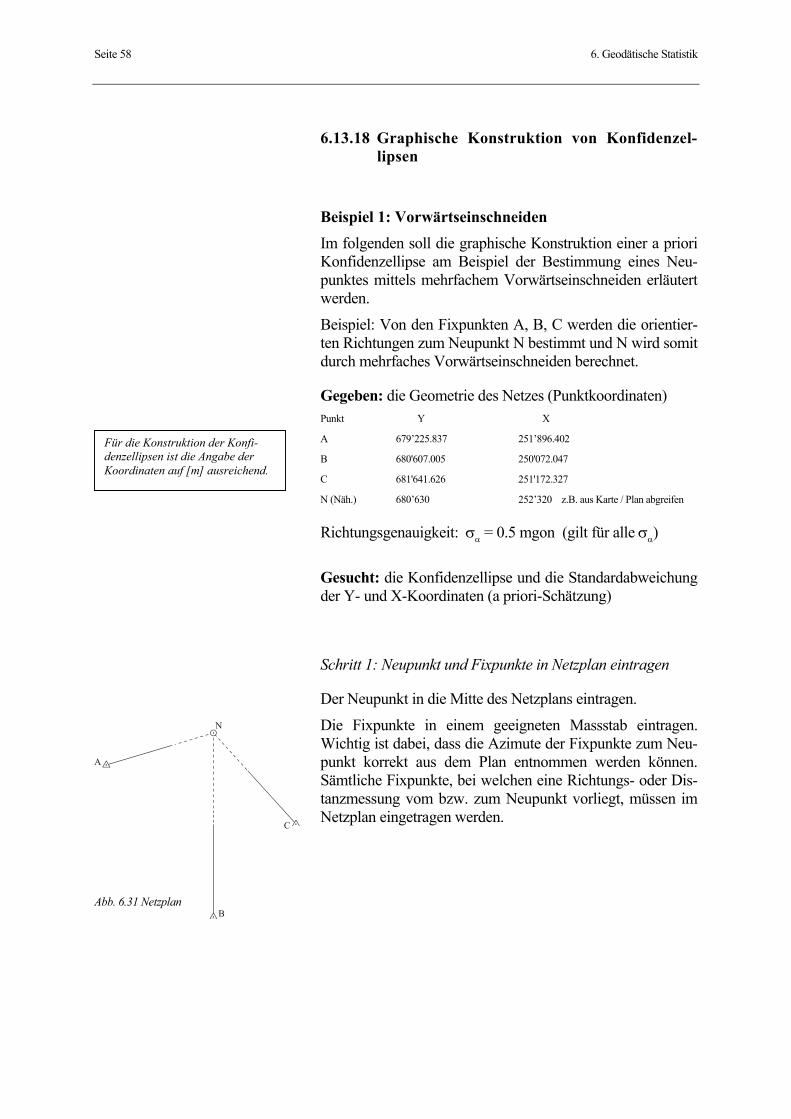
Seite 58 6. Geodätische Statistik
6.13.18 Graphische Konstruktion von Konfidenzel-lipsen
Beispiel 1: Vorwärtseinschneiden Im folgenden soll die graphische Konstruktion einer a priori Konfidenzellipse am Beispiel der Bestimmung eines Neu-punktes mittels mehrfachem Vorwärtseinschneiden erläutert werden.
Beispiel: Von den Fixpunkten A, B, C werden die orientier-ten Richtungen zum Neupunkt N bestimmt und N wird somit durch mehrfaches Vorwärtseinschneiden berechnet.
Gegeben: die Geometrie des Netzes (Punktkoordinaten) Punkt Y X
A 679’225.837 251’896.402
B 680'607.005 250'072.047
C 681'641.626 251'172.327
N (Näh.) 680’630 252’320 z.B. aus Karte / Plan abgreifen
Richtungsgenauigkeit: σα = 0.5 mgon (gilt für alle σα)
Gesucht: die Konfidenzellipse und die Standardabweichung der Y- und X-Koordinaten (a priori-Schätzung)
Schritt 1: Neupunkt und Fixpunkte in Netzplan eintragen
Der Neupunkt in die Mitte des Netzplans eintragen.
Die Fixpunkte in einem geeigneten Massstab eintragen. Wichtig ist dabei, dass die Azimute der Fixpunkte zum Neu-punkt korrekt aus dem Plan entnommen werden können. Sämtliche Fixpunkte, bei welchen eine Richtungs- oder Dis-tanzmessung vom bzw. zum Neupunkt vorliegt, müssen im Netzplan eingetragen werden.
Abb. 6.31 Netzplan
A
N
B
C
Für die Konstruktion der Konfi-denzellipsen ist die Angabe der Koordinaten auf [m] ausreichend.
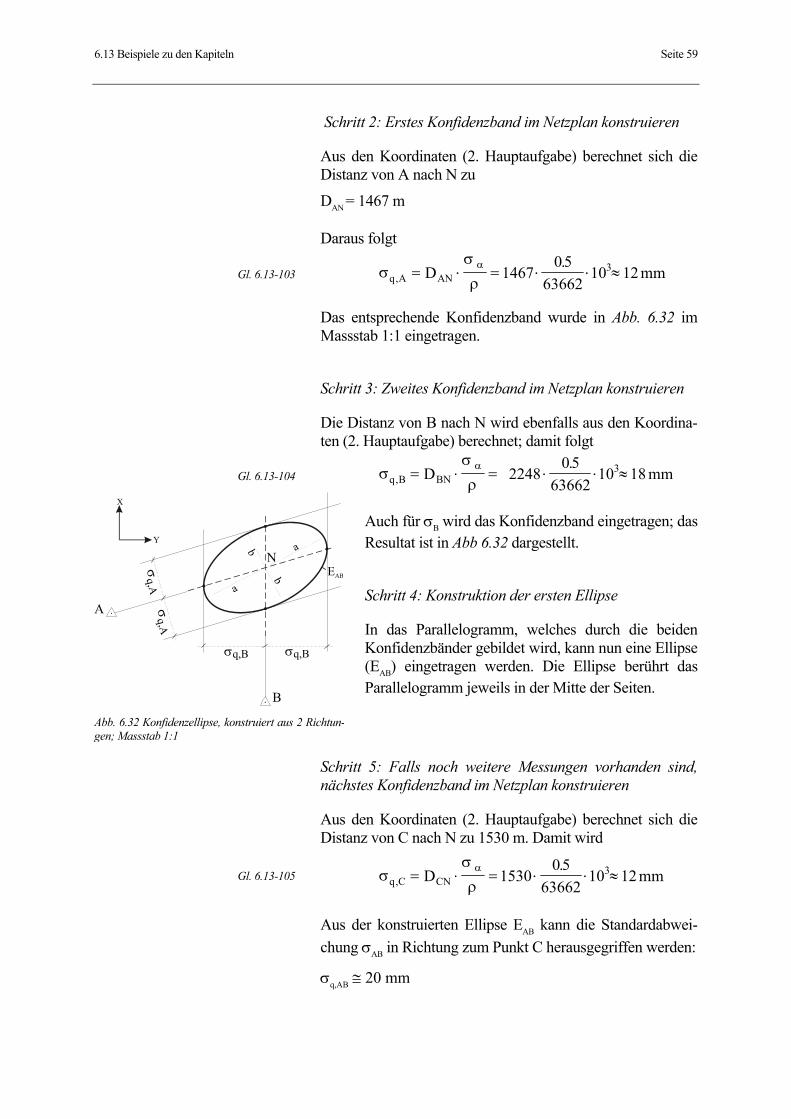
6.13 Beispiele zu den Kapiteln Seite 59
Schritt 2: Erstes Konfidenzband im Netzplan konstruieren
Aus den Koordinaten (2. Hauptaufgabe) berechnet sich die Distanz von A nach N zu
DAN = 1467 m
Daraus folgt
Das entsprechende Konfidenzband wurde in Abb. 6.32 im Massstab 1:1 eingetragen.
Schritt 3: Zweites Konfidenzband im Netzplan konstruieren
Die Distanz von B nach N wird ebenfalls aus den Koordina-ten (2. Hauptaufgabe) berechnet; damit folgt
Auch für σB wird das Konfidenzband eingetragen; das Resultat ist in Abb 6.32 dargestellt.
Schritt 4: Konstruktion der ersten Ellipse
In das Parallelogramm, welches durch die beiden Konfidenzbänder gebildet wird, kann nun eine Ellipse (EAB) eingetragen werden. Die Ellipse berührt das Parallelogramm jeweils in der Mitte der Seiten.
Schritt 5: Falls noch weitere Messungen vorhanden sind, nächstes Konfidenzband im Netzplan konstruieren
Aus den Koordinaten (2. Hauptaufgabe) berechnet sich die Distanz von C nach N zu 1530 m. Damit wird
Aus der konstruierten Ellipse EAB kann die Standardabwei-chung σAB in Richtung zum Punkt C herausgegriffen werden:
σq,AB ≅ 20 mm
Abb. 6.32 Konfidenzellipse, konstruiert aus 2 Richtun-gen; Massstab 1:1
A
B
NEAB
Y
X
σq,A
σq,A
σq,B σq,B
a
ab
b
Gl. 6.13-103
Gl. 6.13-104
Gl. 6.13-105
σ
σ ρ
αq B BND,
. = ⋅ = ⋅ ⋅ ≈ 2248
0 5 63662
10 18 3 mm
σ
σ ρ
αq A AND,
. = ⋅ = ⋅ ⋅ ≈ 1467
0 5 63662
10 12 3 mm
σ
σ ρ
αq C CND,
. = ⋅ = ⋅ ⋅ ≈ 1530
0 5 63662
10 12 3 mm
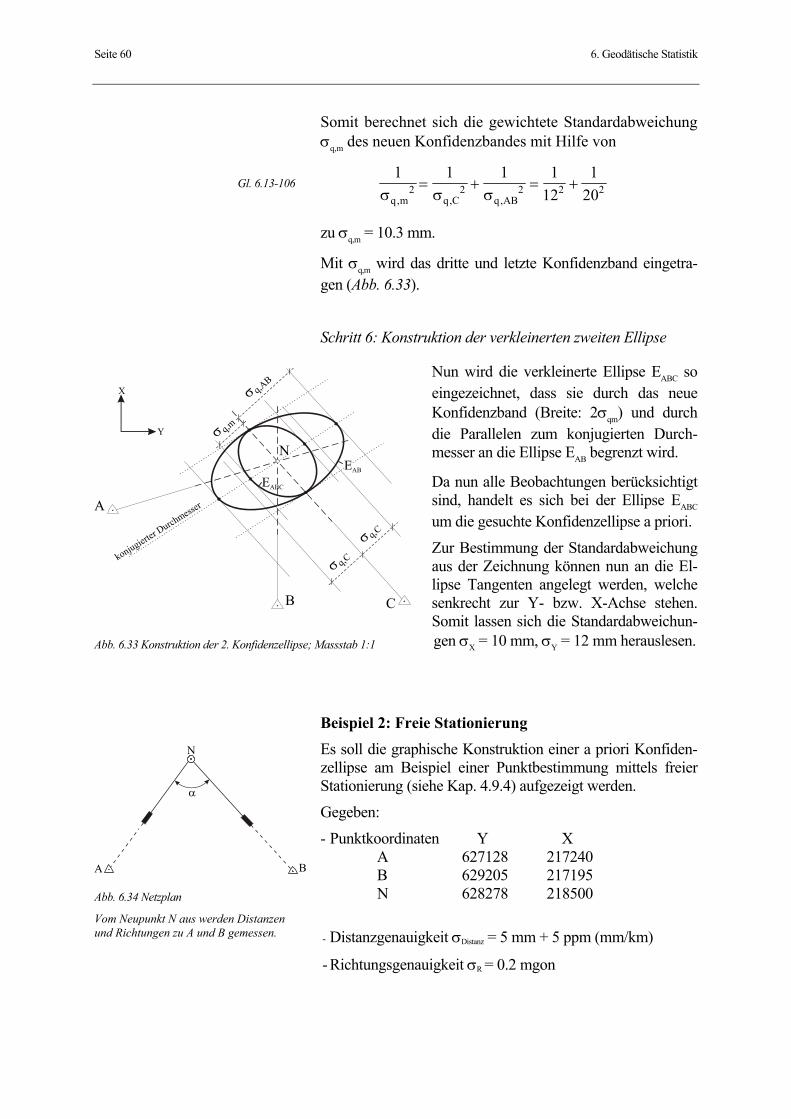
Seite 60 6. Geodätische Statistik
Somit berechnet sich die gewichtete Standardabweichung σq,m des neuen Konfidenzbandes mit Hilfe von
zu σq,m = 10.3 mm.
Mit σq,m wird das dritte und letzte Konfidenzband eingetra-gen (Abb. 6.33).
Schritt 6: Konstruktion der verkleinerten zweiten Ellipse
Nun wird die verkleinerte Ellipse EABC so eingezeichnet, dass sie durch das neue Konfidenzband (Breite: 2σqm) und durch die Parallelen zum konjugierten Durch-messer an die Ellipse EAB begrenzt wird.
Da nun alle Beobachtungen berücksichtigt sind, handelt es sich bei der Ellipse EABC um die gesuchte Konfidenzellipse a priori.
Zur Bestimmung der Standardabweichung aus der Zeichnung können nun an die El-lipse Tangenten angelegt werden, welche senkrecht zur Y- bzw. X-Achse stehen. Somit lassen sich die Standardabweichun-gen σX = 10 mm, σY = 12 mm herauslesen.
Beispiel 2: Freie Stationierung Es soll die graphische Konstruktion einer a priori Konfiden-zellipse am Beispiel einer Punktbestimmung mittels freier Stationierung (siehe Kap. 4.9.4) aufgezeigt werden.
Gegeben:
- Punktkoordinaten Y X A 627128 217240 B 629205 217195 N 628278 218500
- Distanzgenauigkeit σDistanz = 5 mm + 5 ppm (mm/km)
- Richtungsgenauigkeit σR = 0.2 mgon
1 1 1 112
1202 2 2 2 2σ σ σq m q C q AB, , ,
= + = +Gl. 6.13-106
A
B
NEAB
Y
X σ q,AB
σ q,m
σ q,C
σ q,C
C
EABC
konjugierter D
urchmesser
Abb. 6.33 Konstruktion der 2. Konfidenzellipse; Massstab 1:1
A
N
B
α
Abb. 6.34 Netzplan
Vom Neupunkt N aus werden Distanzen und Richtungen zu A und B gemessen.

6.13 Beispiele zu den Kapiteln Seite 61
Schritt 1: Neupunkt und Fixpunkte in Netzplan eintragen
Neben den Punkten sind auch die geplanten Richtungs- und Distanzmessungen einzutragen. Kreis durch A, B und N konstruieren, und an den Kreis eine Tangente durch N legen.
Schritt 2: Erstes Konfidenzband im Netzplan konstruieren
Aus den Koordinaten (2. Hauptaufgabe) berechnet sich die Distanz von A nach N zu:
DAN = 1706 m
σq,A = σlängs,A = 5 mm + 5⋅1.7 = 13.5 mm
Schritt 3: Zweites Konfidenzband im Netzplan konstruieren
Die Distanz von B nach N wird ebenfalls aus den Koordina-ten berechnet, so dass folgt:
DBN = 1601 m σq,B = σlängs,B = 13 mm
Schritt 4: Konstruktion der ersten Ellipse
In das Parallelogramm, welches durch die beiden Konfi-denzbänder gebildet wird, kann nun eine Ellipse (EAB) einge-tragen werden. Die Ellipse berührt das Parallelogramm je-weils in der Mitte der Seiten.
Schritt 5:
Aus den Koordinaten berechnet sich die Distanz von A nach B zu DAB = 2077 m
Damit wird
Das Konfidenzband σq,α verläuft parallel zur Tangente, wel-che an den Kreis ABN durch den Neupunkt N gelegt wurde.
σσραα
qAN BN
AB
D DD, .=
⋅⋅ = 58 mm (siehe Kap. 6.10.6)
mit Rσ σα = ⋅22R
2
RRR
2R
2R
2BA
2
RR
BA
BA
σσ
σσσ
σσσ
α
α
α
⋅=
==
+=
−=

Seite 62 6. Geodätische Statistik
Schritt 6:
Die Geraden des Konfidenzbandes σq,α werden parallel ver-schoben, bis sie die Konfidenzellipse EAB an den Punkten S und T berühren. Die Verbindung zwischen S und T ist der konjugierte Durchmesser der Ellipse, welcher zum Konfi-denzband σq,α konjugiert ist (vgl. Abb. 6.35, fertige Skizze).
Schritt 7: Zweites Parallelogramm konstruieren
An die Ellipse EAB werden zwei Tangenten gelegt, welche parallel zur Strecke ST (konjugierter Durchmesser) verlau-fen.
Der Abstand σq,AB von S (oder T) zur Tangente durch N wird aus der Figur herausgegriffen:
σq,AB = 12 mm
Dieser Abstand ist normalerweise nicht identisch mit der Hälfte des konjugierten Durchmessers.
Somit ergibt sich für die verkleinerte Ellipse das zweite Kon-fidenzband, das parallel zur Tangente an den Kreis AB durch N verläuft und den Abstand σq,m von N hat, wobei:
Schritt 8:
Die verkleinerte Ellipse wird in das Parallelogramm der bei-den Konfidenzbänder hineinkonstruiert, wobei die Ellipse das Parallelogramm in der Mitte der Parallelogrammseiten berührt.
Hinweis:
In diesem Beispiel wurde angenommen, dass die Rich-tungsmessungen eine kleinere Standardabweichung als die Distanzmessungen haben. Daher ist die endgültige Konfi-denzellipse stark exzentrisch. Durch z.B. eine Richtungsmes-sung zu einem Punkt, welcher weit vom Kreis ABN ("ge-fährlicher Kreis") entfernt liegt, kann die Konfidenzellipse wesentlich verkleinert werden.
1 1 15 22 2 2σ σ σ
σαq m q q AB
q m, , ,
, .= + ⇒ = mm
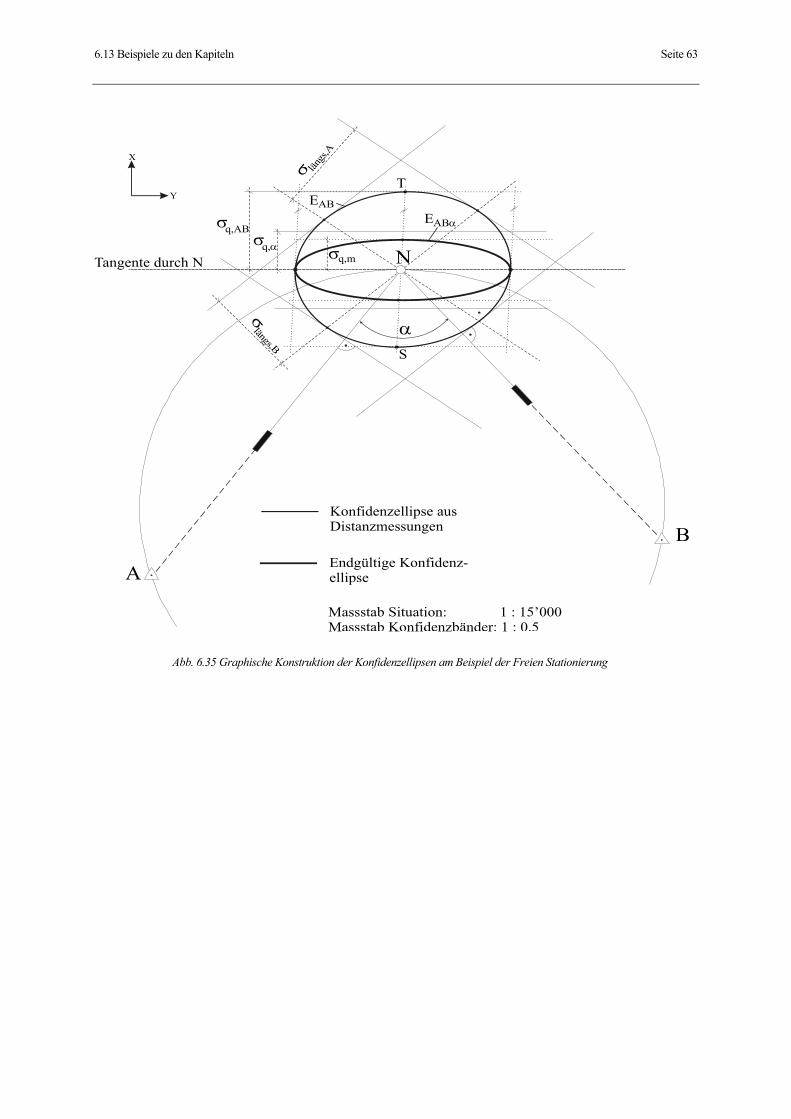
6.13 Beispiele zu den Kapiteln Seite 63
Abb. 6.35 Graphische Konstruktion der Konfidenzellipsen am Beispiel der Freien Stationierung
σlängs,BKonfidenzellipse ausDistanzmessungen
Endgültige Konfidenz-ellipse
σq,ABσq,α σq,m
EABEABα
Y
X
NTangente durch N
α
σ längs
,A
A
B
Massstab Situation: 1 : 15’000Massstab Konfidenzbänder: 1 : 0.5
T
S
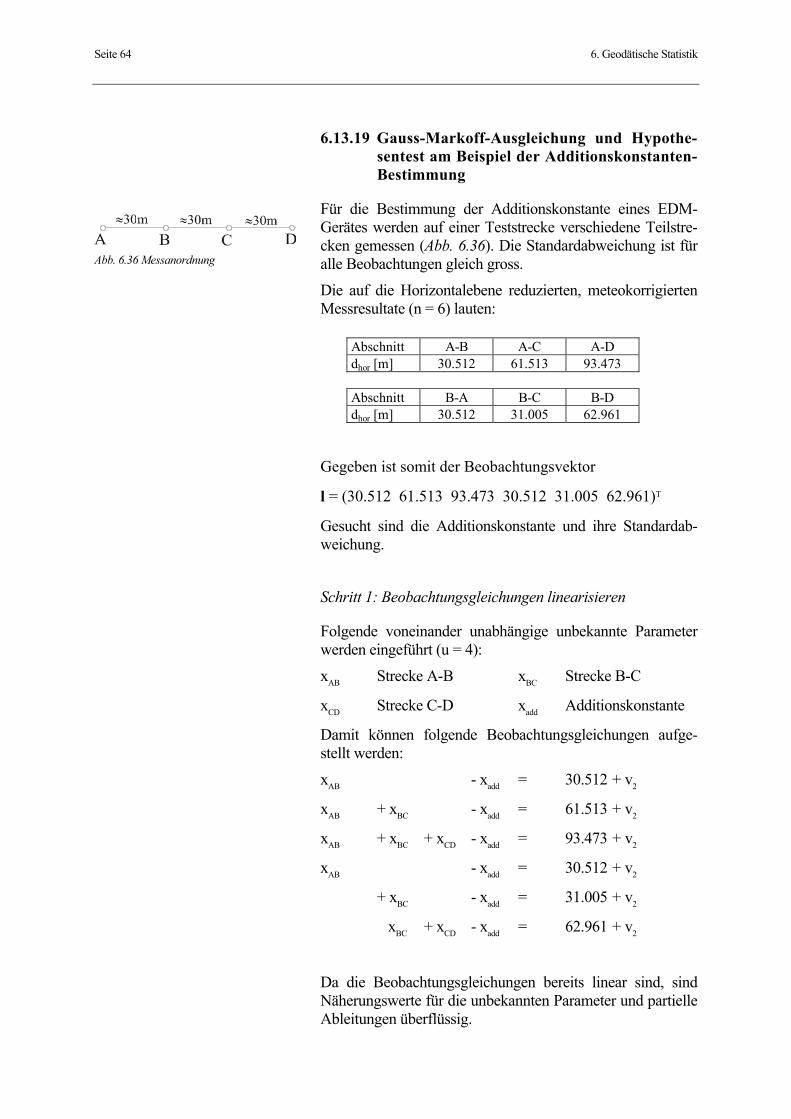
Seite 64 6. Geodätische Statistik
6.13.19 Gauss-Markoff-Ausgleichung und Hypothe-sentest am Beispiel der Additionskonstanten-Bestimmung
Für die Bestimmung der Additionskonstante eines EDM-Gerätes werden auf einer Teststrecke verschiedene Teilstre-cken gemessen (Abb. 6.36). Die Standardabweichung ist für alle Beobachtungen gleich gross.
Die auf die Horizontalebene reduzierten, meteokorrigierten Messresultate (n = 6) lauten:
Gegeben ist somit der Beobachtungsvektor
l = (30.512 61.513 93.473 30.512 31.005 62.961)T
Gesucht sind die Additionskonstante und ihre Standardab-weichung.
Schritt 1: Beobachtungsgleichungen linearisieren
Folgende voneinander unabhängige unbekannte Parameter werden eingeführt (u = 4):
xAB Strecke A-B xBC Strecke B-C
xCD Strecke C-D xadd Additionskonstante
Damit können folgende Beobachtungsgleichungen aufge-stellt werden:
xAB - xadd = 30.512 + v2
xAB + xBC - xadd = 61.513 + v2
xAB + xBC + xCD - xadd = 93.473 + v2
xAB - xadd = 30.512 + v2
+ xBC - xadd = 31.005 + v2
xBC + xCD - xadd = 62.961 + v2
Da die Beobachtungsgleichungen bereits linear sind, sind Näherungswerte für die unbekannten Parameter und partielle Ableitungen überflüssig.
Abb. 6.36 Messanordnung
Abschnitt A-B A-C A-Ddhor [m] 30.512 61.513 93.473
Abschnitt B-A B-C B-Ddhor [m] 30.512 31.005 62.961

6.13 Beispiele zu den Kapiteln Seite 65
Schritt 2: Aufstellung der Verbesserungsgleichungen
v = Ax – l
mit A =
−−−−−−
111010101001111110111001
, l =
961.62005.31512.30473.93513.61512.30
, x =
add
CD
BC
AB
xxxx
v enthält die Verbesserungen (Residuen), wobei gefordert wird, dass vTPv → min
x und v sind unbekannt.
Schritt 3: Kovarianzmatrix und Gewichte
Da vorausgesetzt wird, dass alle Distanzmessungen gleich genau sind, darf σ0
2 = 1 gewählt und die Kovarianzmatrix der Beobachtungen als Einheitsmatrix K(l) = E = P eingeführt werden.
Schritt 4: Unbekannte Parameter x berechnen
x =
− 002.0958.31002.31510.30
ABx = 30.510 m BCx = 31.002 m
CDx = 31.958 m addx = - 2 mm
Schritt 5: Verbesserungen berechnen
v = Ax – l
v = [ ]mm
11
01
10
−
− Kontrolle: Σvi = 0
( ) ( )x A PA A Pl A A A l= =− −T T T T1 1
Gl. 6.13-107
Gl. 6.13-108
Seite 66 6. Geodätische Statistik
Schritt 6: Schlusskontrolle
Die Schlusskontrolle ist in diesem Beispiel prinzipiell nicht nötig, da ja keine Linearisierung durchgeführt wurde. Exem-plarisch (zur Kontrolle von Rechenfehlern) wird für die Beo-bachtung A-C folgende Schlusskontrolle durchgeführt.
xAB + xBC - xadd = l2 + v2
30.510 + 31.002 - (-0.002) = 61.513 + 0.001
61.514 = 61.514
Schritt 7: Berechnung der Varianz der Gewichtseinheit a posteriori
Schritt 8: Berechnung der Standardabweichungen und Ko-varianzen
K(x) = [ ]2mm
30220210215.212012
−−
Somit beträgt die Standardabweichung a posteriori von xadd:
Schritt 9: Hypothesen-Test
Es stellt sich die Frage, ob die Additionskonstante tatsächlich statistisch signifikant von Null (x* = 0 mm) abweicht. Daher soll im folgenden getestet werden (α = 5%):
H0: Die Abweichung |x*- addx | = |0-(-2)| = 2 mm ist auf-grund zufälliger Abweichungen entstanden.
H1: Die Abweichung lässt sich nicht durch zufällige kleine Abweichungen erklären. Die Additionskonstante ist so-mit statistisch signifikant.
sn u0
2 1=
−v PvT
[ ]s mm02 2 2 2 2 2 2 21
6 40 1 1 0 1 1 2=
−⋅ + + − + + + − =( ) ( )
Gl. 6.13-109
Gl. 6.13-110
( )K x A PA( ) T=−
s02 1
Gl. 6.13-111
Gl. 6.13-112
( )s k x mmadd = = =44 3 17.Gl. 6.13-113
6.13 Beispiele zu den Kapiteln Seite 67
Mit f = 6-4 = 2 und tα/2, f = 4.30 berechnet sich das Vertrau-ensintervall zu VI=[ addx - tα/2, f ⋅ sadd ; + tα/2,f ⋅ sadd]=[-9.4 mm ; +5.4 mm] Da x* = 0 im VI liegt, darf die Hypothese H0 akzeptiert wer-den.
Schritt 10: Interpretation
Der geschätzte Wert der Additionskonstante ist aufgrund der angenommenen Hypothese H0 nicht statistisch signifi-kant abweichend von Null.
Das Gerät kann durchaus eine Additionskonstante un-gleich Null aufweisen, sie lässt sich jedoch durch die Testmessung in diesem Beispiel nicht genügend genau bestimmen.
Die Redundanz f = 2 ist sehr gering und daher ist das Ver-trauensintervall auch relativ gross. Sinnvoll wäre es, mehr Messungen durchzuführen, z. B. noch von C nach D zu messen.
Gl. 6.13-114
Seite 68 6. Geodätische Statistik
6.14 Neue und alte Begriffsbildung in der geodäti-schen Statistik
neu alt
Systematische Abweichung Systematischer Fehler
Zufällige Abweichung Zufälliger Fehler
Standardabweichung Mittlerer Fehler
Standardabweichung in Querrichtung Querfehler
Standardabweichung in Längsrichtung Längsfehler
Varianzfortpflanzung Fehlerfortpflanzung
Konfidenzellipse Fehlerellipse
Konfidenzband Fehlerband
Gauss-Markoff-Modell Ausgleichung nach vermit- telnden Beobachtungen
Beobachtungsgleichung Fehlergleichung
Residuum Verbesserung
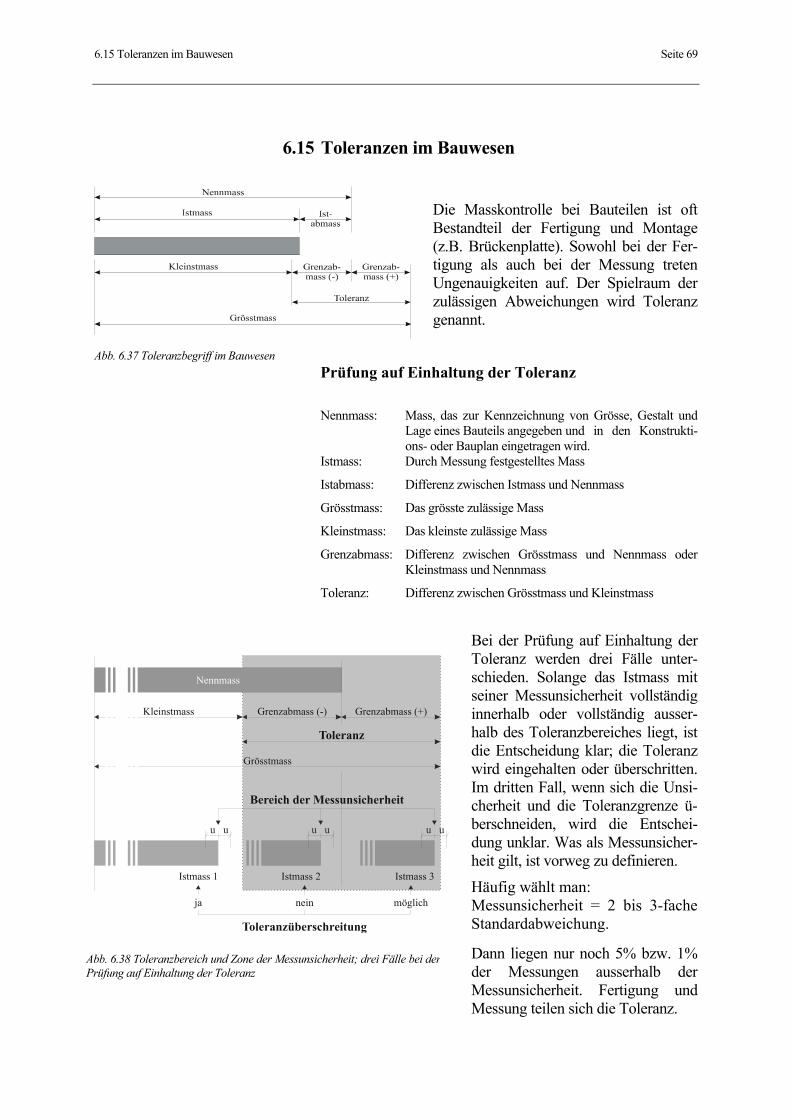
6.15 Toleranzen im Bauwesen Seite 69
6.15 Toleranzen im Bauwesen
Die Masskontrolle bei Bauteilen ist oft Bestandteil der Fertigung und Montage (z.B. Brückenplatte). Sowohl bei der Fer-tigung als auch bei der Messung treten Ungenauigkeiten auf. Der Spielraum der zulässigen Abweichungen wird Toleranz genannt.
Prüfung auf Einhaltung der Toleranz Nennmass: Mass, das zur Kennzeichnung von Grösse, Gestalt und
Lage eines Bauteils angegeben und in den Konstrukti-ons- oder Bauplan eingetragen wird.
Istmass: Durch Messung festgestelltes Mass
Istabmass: Differenz zwischen Istmass und Nennmass
Grösstmass: Das grösste zulässige Mass
Kleinstmass: Das kleinste zulässige Mass
Grenzabmass: Differenz zwischen Grösstmass und Nennmass oder Kleinstmass und Nennmass
Toleranz: Differenz zwischen Grösstmass und Kleinstmass
Bei der Prüfung auf Einhaltung der Toleranz werden drei Fälle unter-schieden. Solange das Istmass mit seiner Messunsicherheit vollständig innerhalb oder vollständig ausser-halb des Toleranzbereiches liegt, ist die Entscheidung klar; die Toleranz wird eingehalten oder überschritten. Im dritten Fall, wenn sich die Unsi-cherheit und die Toleranzgrenze ü-berschneiden, wird die Entschei-dung unklar. Was als Messunsicher-heit gilt, ist vorweg zu definieren.
Häufig wählt man: Messunsicherheit = 2 bis 3-fache Standardabweichung.
Dann liegen nur noch 5% bzw. 1% der Messungen ausserhalb der Messunsicherheit. Fertigung und Messung teilen sich die Toleranz.
Abb. 6.37 Toleranzbegriff im Bauwesen
Abb. 6.38 Toleranzbereich und Zone der Messunsicherheit; drei Fälle bei derPrüfung auf Einhaltung der Toleranz
Grösstmass
Nennmass
Toleranz
Kleinstmass
Istmass 1 Istmass 2 Istmass 3
Grenzabmass (-) Grenzabmass (+)
Toleranzüberschreitung
Bereich der Messunsicherheit
ja nein möglich
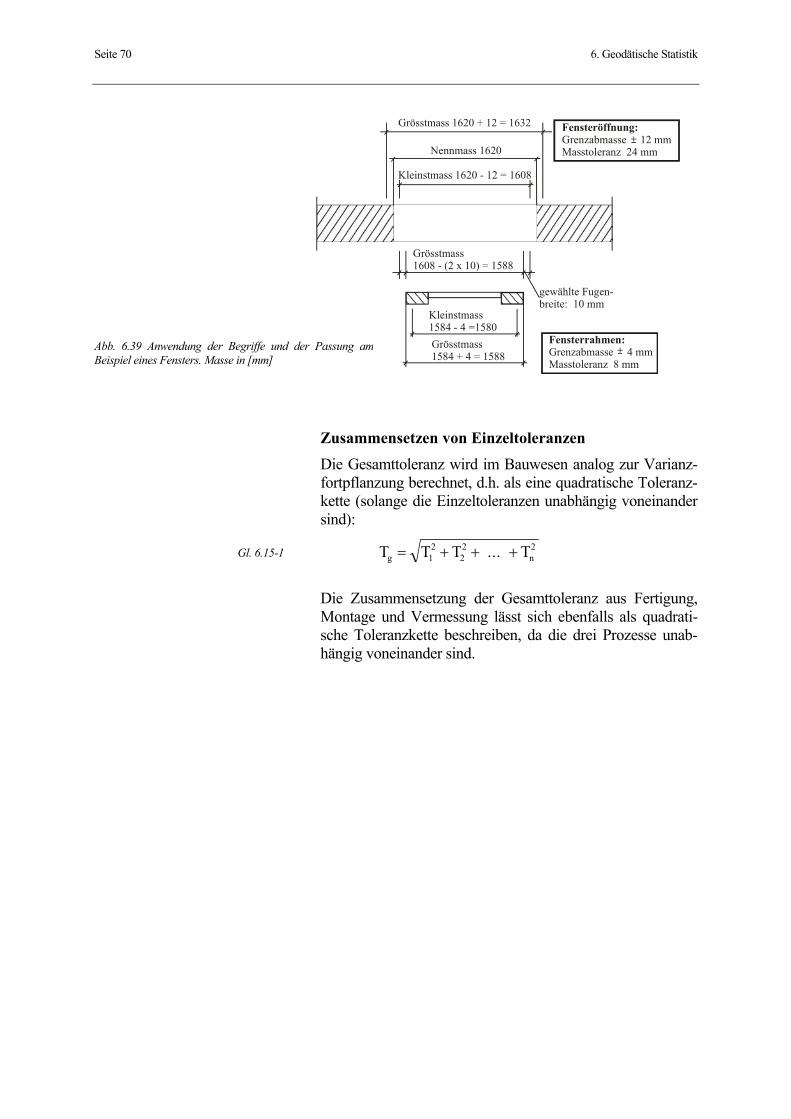
Seite 70 6. Geodätische Statistik
Zusammensetzen von Einzeltoleranzen Die Gesamttoleranz wird im Bauwesen analog zur Varianz-fortpflanzung berechnet, d.h. als eine quadratische Toleranz-kette (solange die Einzeltoleranzen unabhängig voneinander sind):
Die Zusammensetzung der Gesamttoleranz aus Fertigung, Montage und Vermessung lässt sich ebenfalls als quadrati-sche Toleranzkette beschreiben, da die drei Prozesse unab-hängig voneinander sind.
Kleinstmass 1620 - 12 = 1608
Nennmass 1620
Grösstmass 1620 + 12 = 1632 Fensteröffnung:Grenzabmasse 12 mm Masstoleranz 24 mm
+
Grösstmass 1608 - (2 x 10) = 1588
gewählte Fugen-breite: 10 mm
Kleinstmass 1584 - 4 =1580Grösstmass 1584 + 4 = 1588
Fensterrahmen:Grenzabmasse 4 mmMasstoleranz 8 mm
+Abb. 6.39 Anwendung der Begriffe und der Passung amBeispiel eines Fensters. Masse in [mm]
T T T Tg n= + + +12
22 2 ...Gl. 6.15-1
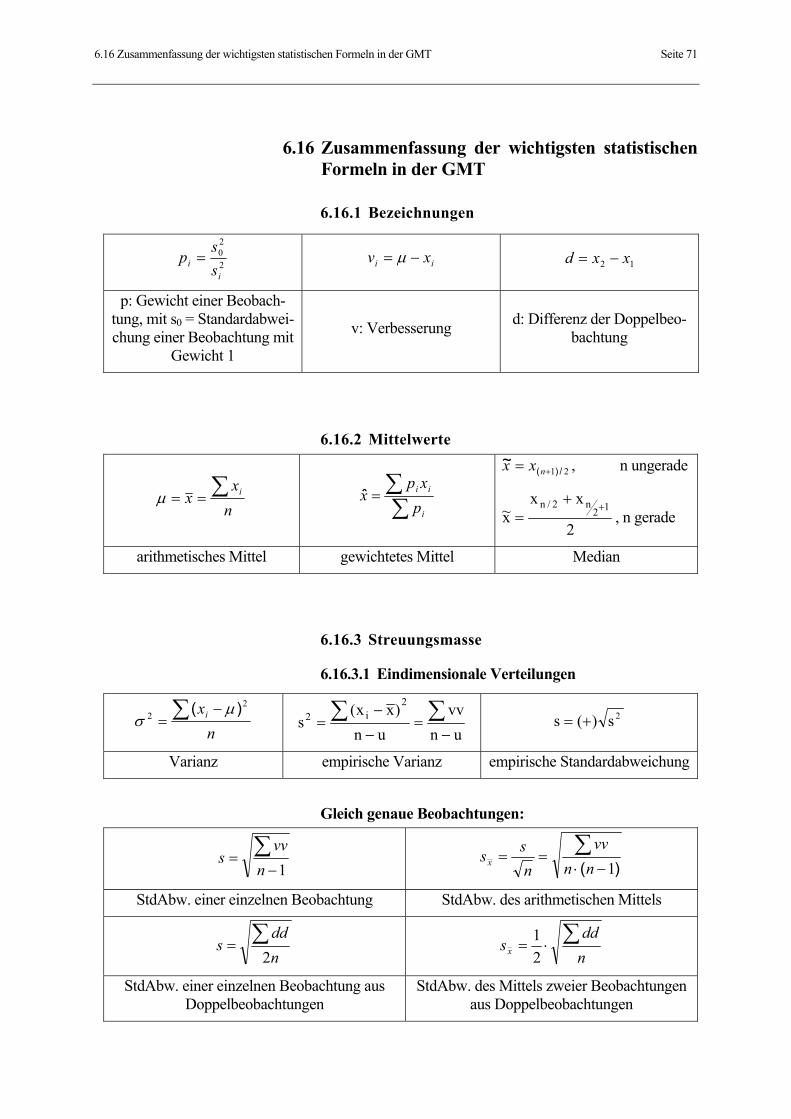
6.16 Zusammenfassung der wichtigsten statistischen Formeln in der GMT Seite 71
6.16 Zusammenfassung der wichtigsten statistischen Formeln in der GMT
6.16.1 Bezeichnungen
6.16.2 Mittelwerte
6.16.3 Streuungsmasse
6.16.3.1 Eindimensionale Verteilungen
Gleich genaue Beobachtungen:
nx
x i∑==µ ∑∑=
i
ii
pxp
x̂ 21 /)(
~+= nxx , n ungerade
2
xxx~
12n2/n +
+= , n gerade
arithmetisches Mittel gewichtetes Mittel Median
nxi∑ −
=2
2 )( µσ
unvv
un)xx(
s2
i2
−=
−
−= ∑∑ 2s)(s +=
Varianz empirische Varianz empirische Standardabweichung
1−= ∑
nvv
s )( 1−⋅
== ∑nnvv
nssx
StdAbw. einer einzelnen Beobachtung StdAbw. des arithmetischen Mittels
ndd
s2
∑= ndd
sx∑⋅=
21
StdAbw. einer einzelnen Beobachtung aus Doppelbeobachtungen
StdAbw. des Mittels zweier Beobachtungen aus Doppelbeobachtungen
2
20
ii s
sp = ii xv −= µ 12 xxd −=
p: Gewicht einer Beobach-tung, mit s0 = Standardabwei-chung einer Beobachtung mit
Gewicht 1
v: Verbesserung d: Differenz der Doppelbeo-bachtung
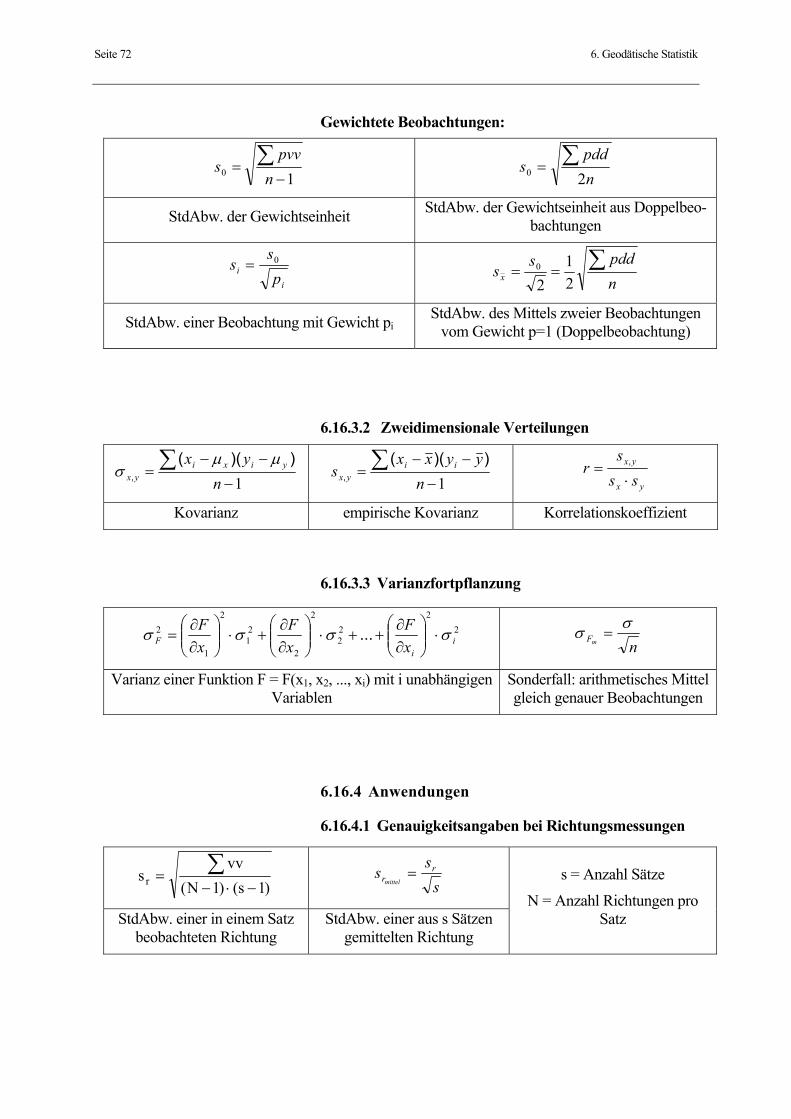
Seite 72 6. Geodätische Statistik
Gewichtete Beobachtungen:
6.16.3.2 Zweidimensionale Verteilungen
6.16.3.3 Varianzfortpflanzung
6.16.4 Anwendungen
6.16.4.1 Genauigkeitsangaben bei Richtungsmessungen
10 −= ∑
npvv
s npdd
s20
∑=
StdAbw. der Gewichtseinheit StdAbw. der Gewichtseinheit aus Doppelbeo-bachtungen
ii p
ss 0=
npdds
sx∑==
21
20
StdAbw. einer Beobachtung mit Gewicht pi StdAbw. des Mittels zweier Beobachtungen
vom Gewicht p=1 (Doppelbeobachtung)
1−
−−= ∑
nyx yixi
yx
))((,
µµσ
1−
−−= ∑
nyyxx
s iiyx
))((,
yx
yx
sss
r⋅
= ,
Kovarianz empirische Kovarianz Korrelationskoeffizient
22
22
2
2
21
2
1
2i
iF x
FxF
xF σσσσ ⋅
∂∂
++⋅
∂∂
+⋅
∂∂
= ... nmF
σσ =
Varianz einer Funktion F = F(x1, x2, ..., xi) mit i unabhängigen Variablen
Sonderfall: arithmetisches Mittel gleich genauer Beobachtungen
)1s()1N(vv
sr −⋅−= ∑
ss
s rrmittel
=
StdAbw. einer in einem Satz beobachteten Richtung
StdAbw. einer aus s Sätzen gemittelten Richtung
s = Anzahl Sätze
N = Anzahl Richtungen pro Satz

6.16 Zusammenfassung der wichtigsten statistischen Formeln in der GMT Seite 73
6.16.4.2 Genauigkeitsangaben bei Zenitwinkelmessungen
6.16.4.3 Genauigkeitsangaben beim Abriss
6.16.4.4 Varianzfortpflanzung beim Polygonzug
NNsvv
sz −⋅= ∑
ss
s zzmittel
=
StdAbw. eines Zenitwinkels StdAbw. der gemittelten Orientierung
s = Anzahl Sätze
N = Anzahl Zenitwinkel
10 −= ∑
nvv
s ns
smittel
00 =
)()(
11 2 −⋅
⋅+= ∑nn
vvns
ORR
StdAbw. einer Orientierung (Richtung)
StdAbw. der gemittelten Orientierung
StdAbw. einer orientierten Richtung
wobei n = Anzahl Anschlussrichtungen
24ns
LsqM ⋅⋅=ρα
3ns
LsqE ⋅⋅=ρα
einseitiger, freier Polygonzug, StdAbw. in Querrichtung, Zugmitte
einseitiger, freier Polygonzug, StdAbw. in Querrichtung, Zugende
192ns
LsqM ⋅⋅=ρα 0=qEs
eingezwängter Polygonzug, zweiseitiger Koor-dinaten- und Richtungsanschluss, Zugmitte
eingezwängter Polygonzug, zweiseitiger Koor-dinaten- und Richtungsanschluss, Zugende
es gilt: Anzahl Seiten n, gleiche Seitenlänge D, Gesamtlänge L = n · D,
alle Winkel gleich genau gemessen mit Standardabweichung sα
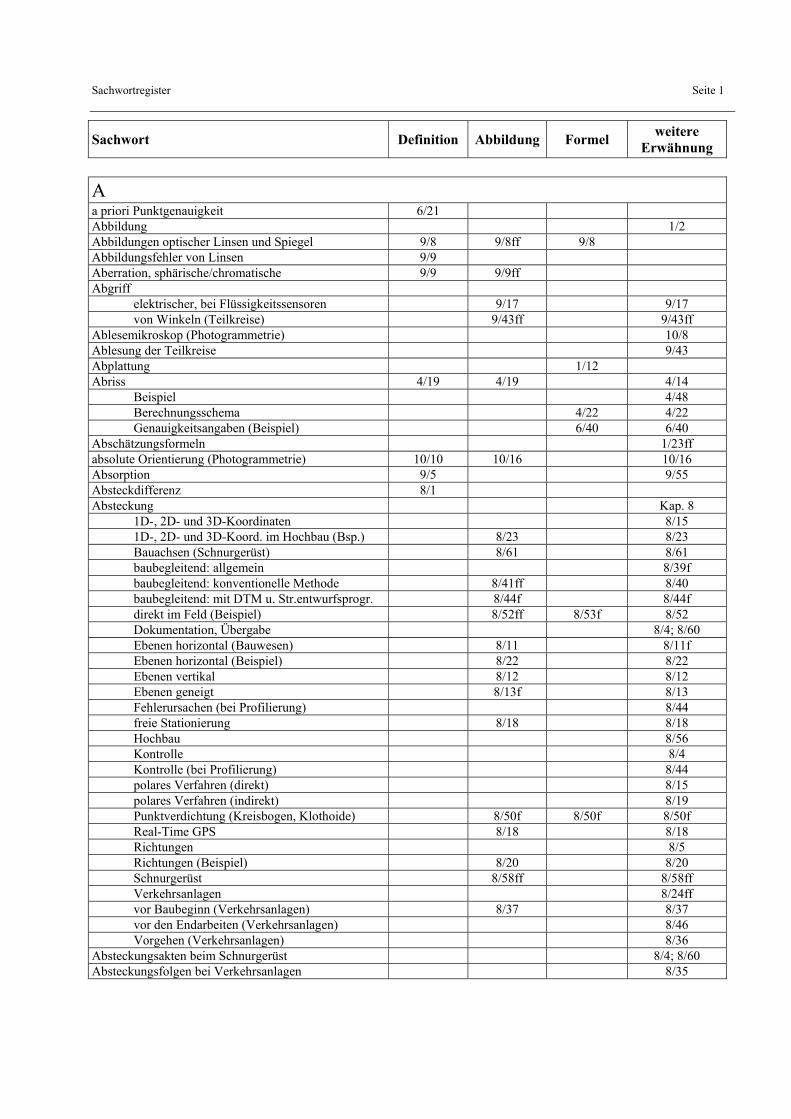
Sachwortregister Seite 1
Sachwort Definition Abbildung Formel weitere Erwähnung
A a priori Punktgenauigkeit 6/21 Abbildung 1/2 Abbildungen optischer Linsen und Spiegel 9/8 9/8ff 9/8 Abbildungsfehler von Linsen 9/9 Aberration, sphärische/chromatische 9/9 9/9ff Abgriff elektrischer, bei Flüssigkeitssensoren 9/17 9/17 von Winkeln (Teilkreise) 9/43ff 9/43ff Ablesemikroskop (Photogrammetrie) 10/8 Ablesung der Teilkreise 9/43 Abplattung 1/12 Abriss 4/19 4/19 4/14 Beispiel 4/48 Berechnungsschema 4/22 4/22 Genauigkeitsangaben (Beispiel) 6/40 6/40 Abschätzungsformeln 1/23ff absolute Orientierung (Photogrammetrie) 10/10 10/16 10/16 Absorption 9/5 9/55 Absteckdifferenz 8/1 Absteckung Kap. 8 1D-, 2D- und 3D-Koordinaten 8/15 1D-, 2D- und 3D-Koord. im Hochbau (Bsp.) 8/23 8/23 Bauachsen (Schnurgerüst) 8/61 8/61 baubegleitend: allgemein 8/39f baubegleitend: konventionelle Methode 8/41ff 8/40 baubegleitend: mit DTM u. Str.entwurfsprogr. 8/44f 8/44f direkt im Feld (Beispiel) 8/52ff 8/53f 8/52 Dokumentation, Übergabe 8/4; 8/60 Ebenen horizontal (Bauwesen) 8/11 8/11f Ebenen horizontal (Beispiel) 8/22 8/22 Ebenen vertikal 8/12 8/12 Ebenen geneigt 8/13f 8/13 Fehlerursachen (bei Profilierung) 8/44 freie Stationierung 8/18 8/18 Hochbau 8/56 Kontrolle 8/4 Kontrolle (bei Profilierung) 8/44 polares Verfahren (direkt) 8/15 polares Verfahren (indirekt) 8/19 Punktverdichtung (Kreisbogen, Klothoide) 8/50f 8/50f 8/50f Real-Time GPS 8/18 8/18 Richtungen 8/5 Richtungen (Beispiel) 8/20 8/20 Schnurgerüst 8/58ff 8/58ff Verkehrsanlagen 8/24ff vor Baubeginn (Verkehrsanlagen) 8/37 8/37 vor den Endarbeiten (Verkehrsanlagen) 8/46 Vorgehen (Verkehrsanlagen) 8/36 Absteckungsakten beim Schnurgerüst 8/4; 8/60 Absteckungsfolgen bei Verkehrsanlagen 8/35
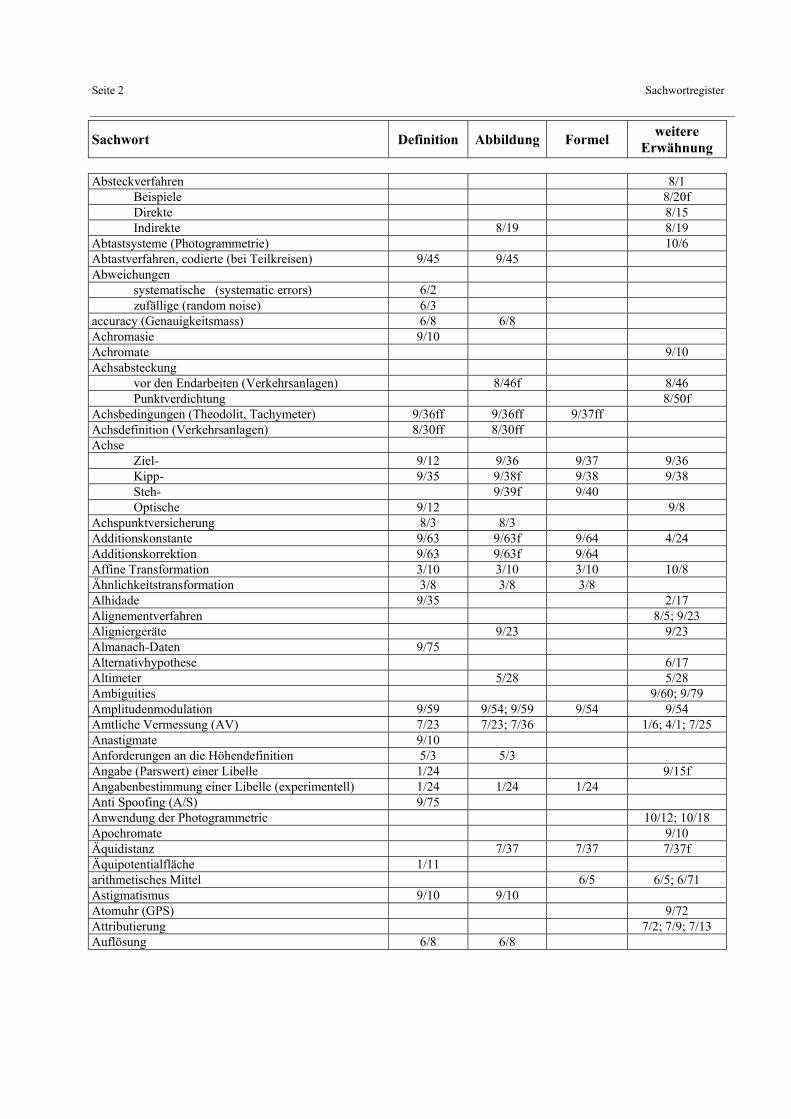
Seite 2 Sachwortregister
Sachwort Definition Abbildung Formel weitere Erwähnung
Absteckverfahren 8/1 Beispiele 8/20f Direkte 8/15 Indirekte 8/19 8/19 Abtastsysteme (Photogrammetrie) 10/6 Abtastverfahren, codierte (bei Teilkreisen) 9/45 9/45 Abweichungen systematische (systematic errors) 6/2 zufällige (random noise) 6/3 accuracy (Genauigkeitsmass) 6/8 6/8 Achromasie 9/10 Achromate 9/10 Achsabsteckung vor den Endarbeiten (Verkehrsanlagen) 8/46f 8/46 Punktverdichtung 8/50f Achsbedingungen (Theodolit, Tachymeter) 9/36ff 9/36ff 9/37ff Achsdefinition (Verkehrsanlagen) 8/30ff 8/30ff Achse Ziel- 9/12 9/36 9/37 9/36 Kipp- 9/35 9/38f 9/38 9/38 Steh- 9/39f 9/40 Optische 9/12 9/8 Achspunktversicherung 8/3 8/3 Additionskonstante 9/63 9/63f 9/64 4/24 Additionskorrektion 9/63 9/63f 9/64 Affine Transformation 3/10 3/10 3/10 10/8 Ähnlichkeitstransformation 3/8 3/8 3/8 Alhidade 9/35 2/17 Alignementverfahren 8/5; 9/23 Aligniergeräte 9/23 9/23 Almanach-Daten 9/75 Alternativhypothese 6/17 Altimeter 5/28 5/28 Ambiguities 9/60; 9/79 Amplitudenmodulation 9/59 9/54; 9/59 9/54 9/54 Amtliche Vermessung (AV) 7/23 7/23; 7/36 1/6; 4/1; 7/25 Anastigmate 9/10 Anforderungen an die Höhendefinition 5/3 5/3 Angabe (Parswert) einer Libelle 1/24 9/15f Angabenbestimmung einer Libelle (experimentell) 1/24 1/24 1/24 Anti Spoofing (A/S) 9/75 Anwendung der Photogrammetrie 10/12; 10/18 Apochromate 9/10 Äquidistanz 7/37 7/37 7/37f Äquipotentialfläche 1/11 arithmetisches Mittel 6/5 6/5; 6/71 Astigmatismus 9/10 9/10 Atomuhr (GPS) 9/72 Attributierung 7/2; 7/9; 7/13 Auflösung 6/8 6/8
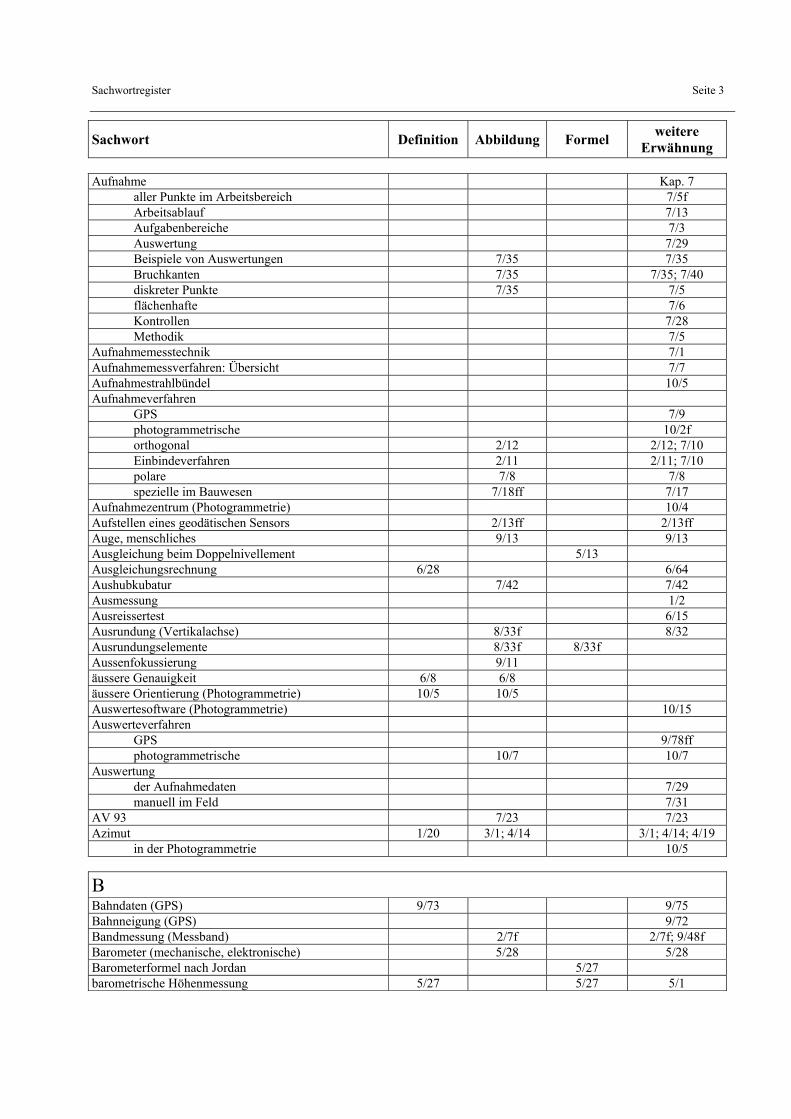
Sachwortregister Seite 3
Sachwort Definition Abbildung Formel weitere Erwähnung
Aufnahme Kap. 7 aller Punkte im Arbeitsbereich 7/5f Arbeitsablauf 7/13 Aufgabenbereiche 7/3 Auswertung 7/29 Beispiele von Auswertungen 7/35 7/35 Bruchkanten 7/35 7/35; 7/40 diskreter Punkte 7/35 7/5 flächenhafte 7/6 Kontrollen 7/28 Methodik 7/5 Aufnahmemesstechnik 7/1 Aufnahmemessverfahren: Übersicht 7/7 Aufnahmestrahlbündel 10/5 Aufnahmeverfahren GPS 7/9 photogrammetrische 10/2f orthogonal 2/12 2/12; 7/10 Einbindeverfahren 2/11 2/11; 7/10 polare 7/8 7/8 spezielle im Bauwesen 7/18ff 7/17 Aufnahmezentrum (Photogrammetrie) 10/4 Aufstellen eines geodätischen Sensors 2/13ff 2/13ff Auge, menschliches 9/13 9/13 Ausgleichung beim Doppelnivellement 5/13 Ausgleichungsrechnung 6/28 6/64 Aushubkubatur 7/42 7/42 Ausmessung 1/2 Ausreissertest 6/15 Ausrundung (Vertikalachse) 8/33f 8/32 Ausrundungselemente 8/33f 8/33f Aussenfokussierung 9/11 äussere Genauigkeit 6/8 6/8 äussere Orientierung (Photogrammetrie) 10/5 10/5 Auswertesoftware (Photogrammetrie) 10/15 Auswerteverfahren GPS 9/78ff photogrammetrische 10/7 10/7 Auswertung der Aufnahmedaten 7/29 manuell im Feld 7/31 AV 93 7/23 7/23 Azimut 1/20 3/1; 4/14 3/1; 4/14; 4/19 in der Photogrammetrie 10/5
B Bahndaten (GPS) 9/73 9/75 Bahnneigung (GPS) 9/72 Bandmessung (Messband) 2/7f 2/7f; 9/48f Barometer (mechanische, elektronische) 5/28 5/28 Barometerformel nach Jordan 5/27 barometrische Höhenmessung 5/27 5/27 5/1
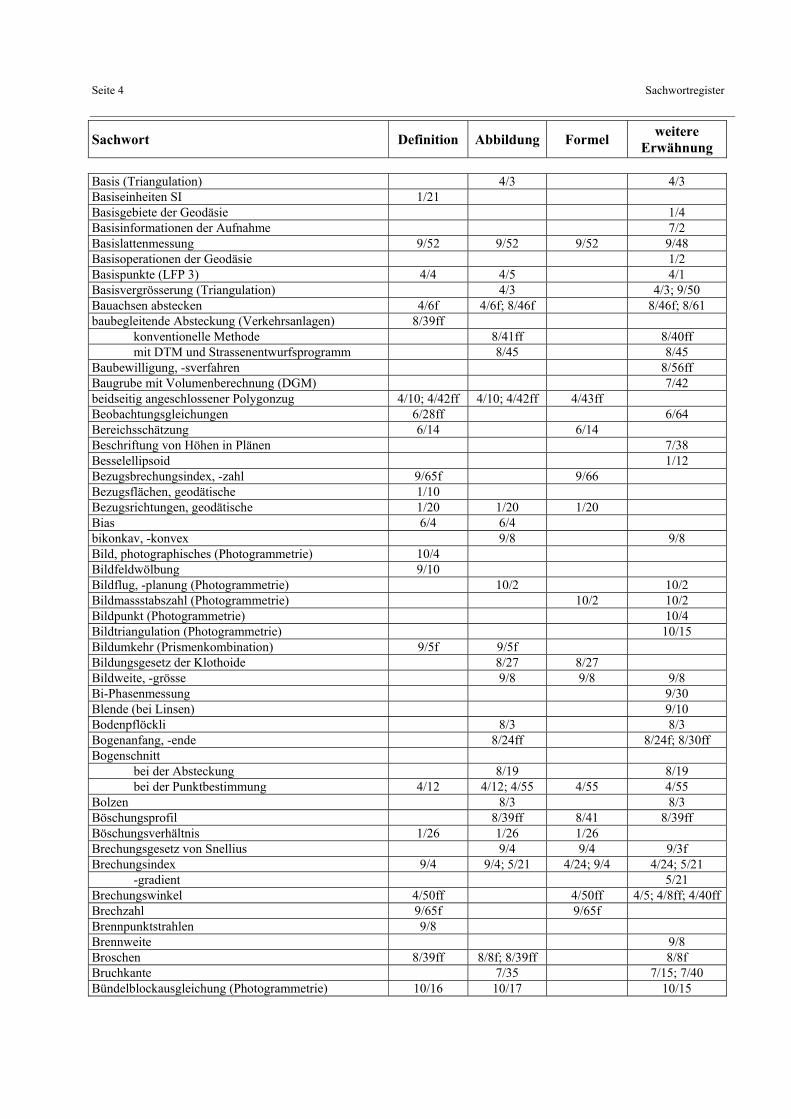
Seite 4 Sachwortregister
Sachwort Definition Abbildung Formel weitere Erwähnung
Basis (Triangulation) 4/3 4/3 Basiseinheiten SI 1/21 Basisgebiete der Geodäsie 1/4 Basisinformationen der Aufnahme 7/2 Basislattenmessung 9/52 9/52 9/52 9/48 Basisoperationen der Geodäsie 1/2 Basispunkte (LFP 3) 4/4 4/5 4/1 Basisvergrösserung (Triangulation) 4/3 4/3; 9/50 Bauachsen abstecken 4/6f 4/6f; 8/46f 8/46f; 8/61 baubegleitende Absteckung (Verkehrsanlagen) 8/39ff konventionelle Methode 8/41ff 8/40ff mit DTM und Strassenentwurfsprogramm 8/45 8/45 Baubewilligung, -sverfahren 8/56ff Baugrube mit Volumenberechnung (DGM) 7/42 beidseitig angeschlossener Polygonzug 4/10; 4/42ff 4/10; 4/42ff 4/43ff Beobachtungsgleichungen 6/28ff 6/64 Bereichsschätzung 6/14 6/14 Beschriftung von Höhen in Plänen 7/38 Besselellipsoid 1/12 Bezugsbrechungsindex, -zahl 9/65f 9/66 Bezugsflächen, geodätische 1/10 Bezugsrichtungen, geodätische 1/20 1/20 1/20 Bias 6/4 6/4 bikonkav, -konvex 9/8 9/8 Bild, photographisches (Photogrammetrie) 10/4 Bildfeldwölbung 9/10 Bildflug, -planung (Photogrammetrie) 10/2 10/2 Bildmassstabszahl (Photogrammetrie) 10/2 10/2 Bildpunkt (Photogrammetrie) 10/4 Bildtriangulation (Photogrammetrie) 10/15 Bildumkehr (Prismenkombination) 9/5f 9/5f Bildungsgesetz der Klothoide 8/27 8/27 Bildweite, -grösse 9/8 9/8 9/8 Bi-Phasenmessung 9/30 Blende (bei Linsen) 9/10 Bodenpflöckli 8/3 8/3 Bogenanfang, -ende 8/24ff 8/24f; 8/30ff Bogenschnitt bei der Absteckung 8/19 8/19 bei der Punktbestimmung 4/12 4/12; 4/55 4/55 4/55 Bolzen 8/3 8/3 Böschungsprofil 8/39ff 8/41 8/39ff Böschungsverhältnis 1/26 1/26 1/26 Brechungsgesetz von Snellius 9/4 9/4 9/3f Brechungsindex 9/4 9/4; 5/21 4/24; 9/4 4/24; 5/21 -gradient 5/21 Brechungswinkel 4/50ff 4/50ff 4/5; 4/8ff; 4/40ffBrechzahl 9/65f 9/65f Brennpunktstrahlen 9/8 Brennweite 9/8 Broschen 8/39ff 8/8f; 8/39ff 8/8f Bruchkante 7/35 7/15; 7/40 Bündelblockausgleichung (Photogrammetrie) 10/16 10/17 10/15
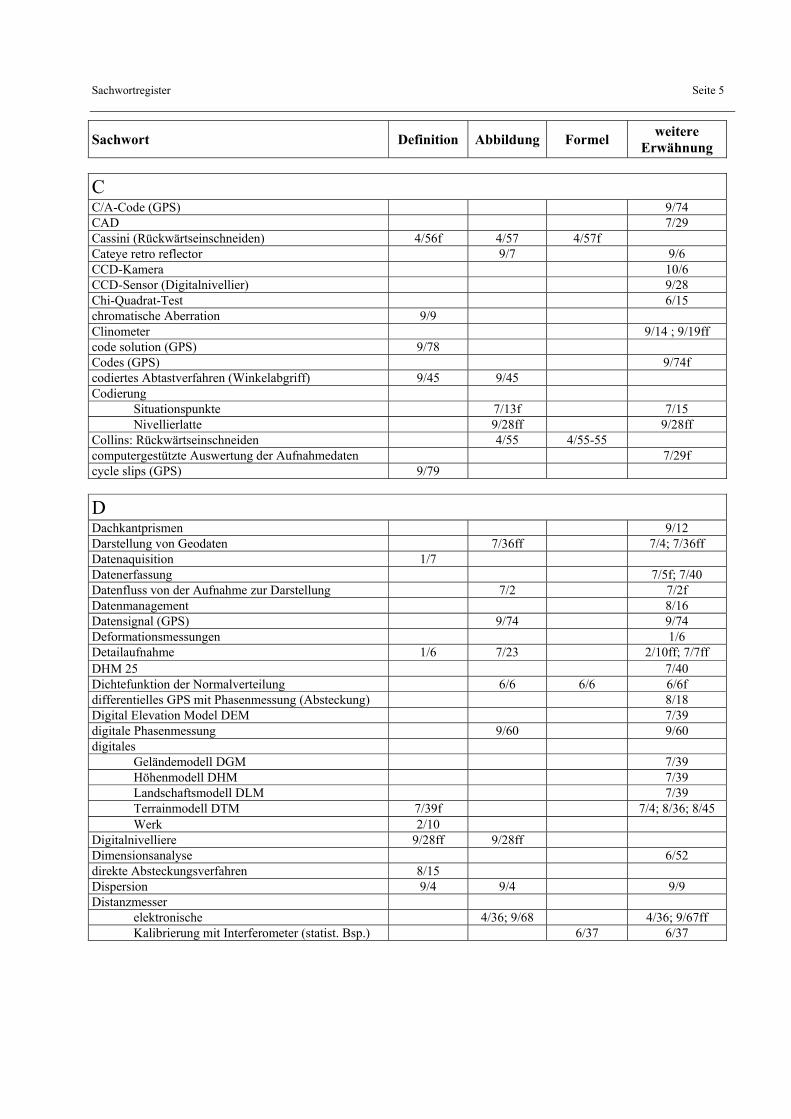
Sachwortregister Seite 5
Sachwort Definition Abbildung Formel weitere Erwähnung
C C/A-Code (GPS) 9/74 CAD 7/29 Cassini (Rückwärtseinschneiden) 4/56f 4/57 4/57f Cateye retro reflector 9/7 9/6 CCD-Kamera 10/6 CCD-Sensor (Digitalnivellier) 9/28 Chi-Quadrat-Test 6/15 chromatische Aberration 9/9 Clinometer 9/14 ; 9/19ff code solution (GPS) 9/78 Codes (GPS) 9/74f codiertes Abtastverfahren (Winkelabgriff) 9/45 9/45 Codierung Situationspunkte 7/13f 7/15 Nivellierlatte 9/28ff 9/28ff Collins: Rückwärtseinschneiden 4/55 4/55-55 computergestützte Auswertung der Aufnahmedaten 7/29f cycle slips (GPS) 9/79
D Dachkantprismen 9/12 Darstellung von Geodaten 7/36ff 7/4; 7/36ff Datenaquisition 1/7 Datenerfassung 7/5f; 7/40 Datenfluss von der Aufnahme zur Darstellung 7/2 7/2f Datenmanagement 8/16 Datensignal (GPS) 9/74 9/74 Deformationsmessungen 1/6 Detailaufnahme 1/6 7/23 2/10ff; 7/7ff DHM 25 7/40 Dichtefunktion der Normalverteilung 6/6 6/6 6/6f differentielles GPS mit Phasenmessung (Absteckung) 8/18 Digital Elevation Model DEM 7/39 digitale Phasenmessung 9/60 9/60 digitales Geländemodell DGM 7/39 Höhenmodell DHM 7/39 Landschaftsmodell DLM 7/39 Terrainmodell DTM 7/39f 7/4; 8/36; 8/45 Werk 2/10 Digitalnivelliere 9/28ff 9/28ff Dimensionsanalyse 6/52 direkte Absteckungsverfahren 8/15 Dispersion 9/4 9/4 9/9 Distanzmesser elektronische 4/36; 9/68 4/36; 9/67ff Kalibrierung mit Interferometer (statist. Bsp.) 6/37 6/37
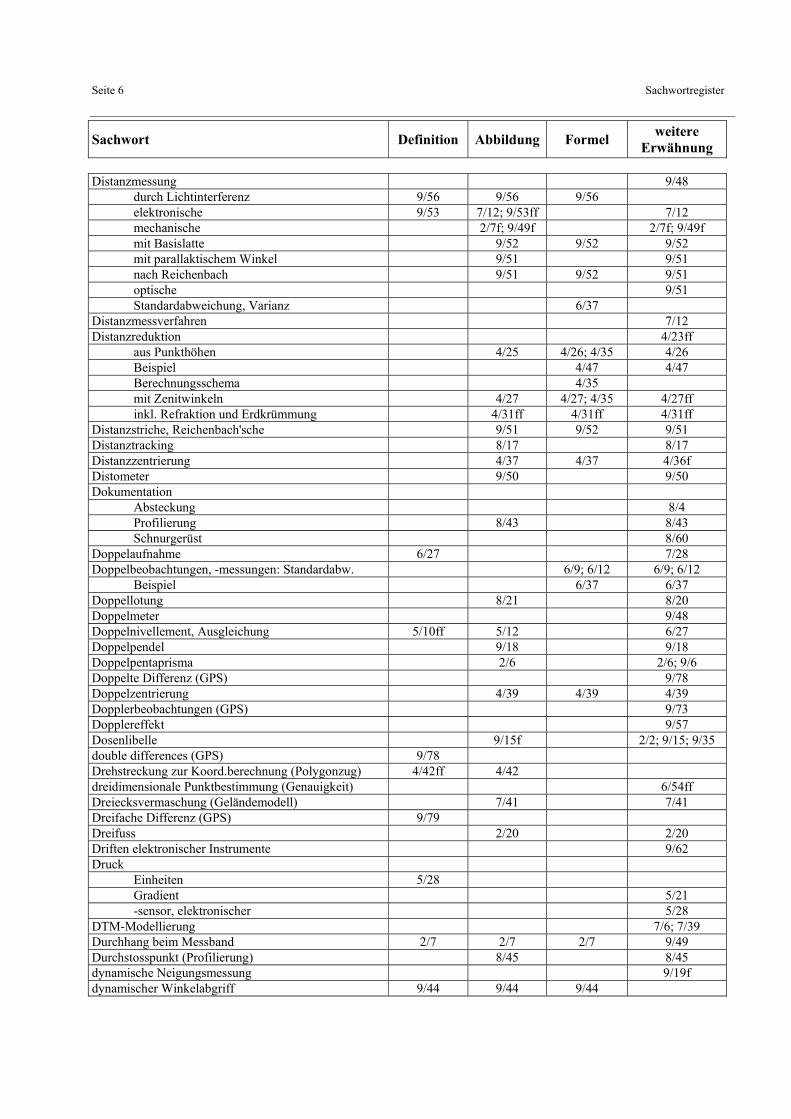
Seite 6 Sachwortregister
Sachwort Definition Abbildung Formel weitere Erwähnung
Distanzmessung 9/48 durch Lichtinterferenz 9/56 9/56 9/56 elektronische 9/53 7/12; 9/53ff 7/12 mechanische 2/7f; 9/49f 2/7f; 9/49f mit Basislatte 9/52 9/52 9/52 mit parallaktischem Winkel 9/51 9/51 nach Reichenbach 9/51 9/52 9/51 optische 9/51 Standardabweichung, Varianz 6/37 Distanzmessverfahren 7/12 Distanzreduktion 4/23ff aus Punkthöhen 4/25 4/26; 4/35 4/26 Beispiel 4/47 4/47 Berechnungsschema 4/35 mit Zenitwinkeln 4/27 4/27; 4/35 4/27ff inkl. Refraktion und Erdkrümmung 4/31ff 4/31ff 4/31ff Distanzstriche, Reichenbach'sche 9/51 9/52 9/51 Distanztracking 8/17 8/17 Distanzzentrierung 4/37 4/37 4/36f Distometer 9/50 9/50 Dokumentation Absteckung 8/4 Profilierung 8/43 8/43 Schnurgerüst 8/60 Doppelaufnahme 6/27 7/28 Doppelbeobachtungen, -messungen: Standardabw. 6/9; 6/12 6/9; 6/12 Beispiel 6/37 6/37 Doppellotung 8/21 8/20 Doppelmeter 9/48 Doppelnivellement, Ausgleichung 5/10ff 5/12 6/27 Doppelpendel 9/18 9/18 Doppelpentaprisma 2/6 2/6; 9/6 Doppelte Differenz (GPS) 9/78 Doppelzentrierung 4/39 4/39 4/39 Dopplerbeobachtungen (GPS) 9/73 Dopplereffekt 9/57 Dosenlibelle 9/15f 2/2; 9/15; 9/35 double differences (GPS) 9/78 Drehstreckung zur Koord.berechnung (Polygonzug) 4/42ff 4/42 dreidimensionale Punktbestimmung (Genauigkeit) 6/54ff Dreiecksvermaschung (Geländemodell) 7/41 7/41 Dreifache Differenz (GPS) 9/79 Dreifuss 2/20 2/20 Driften elektronischer Instrumente 9/62 Druck Einheiten 5/28 Gradient 5/21 -sensor, elektronischer 5/28 DTM-Modellierung 7/6; 7/39 Durchhang beim Messband 2/7 2/7 2/7 9/49 Durchstosspunkt (Profilierung) 8/45 8/45 dynamische Neigungsmessung 9/19f dynamischer Winkelabgriff 9/44 9/44 9/44
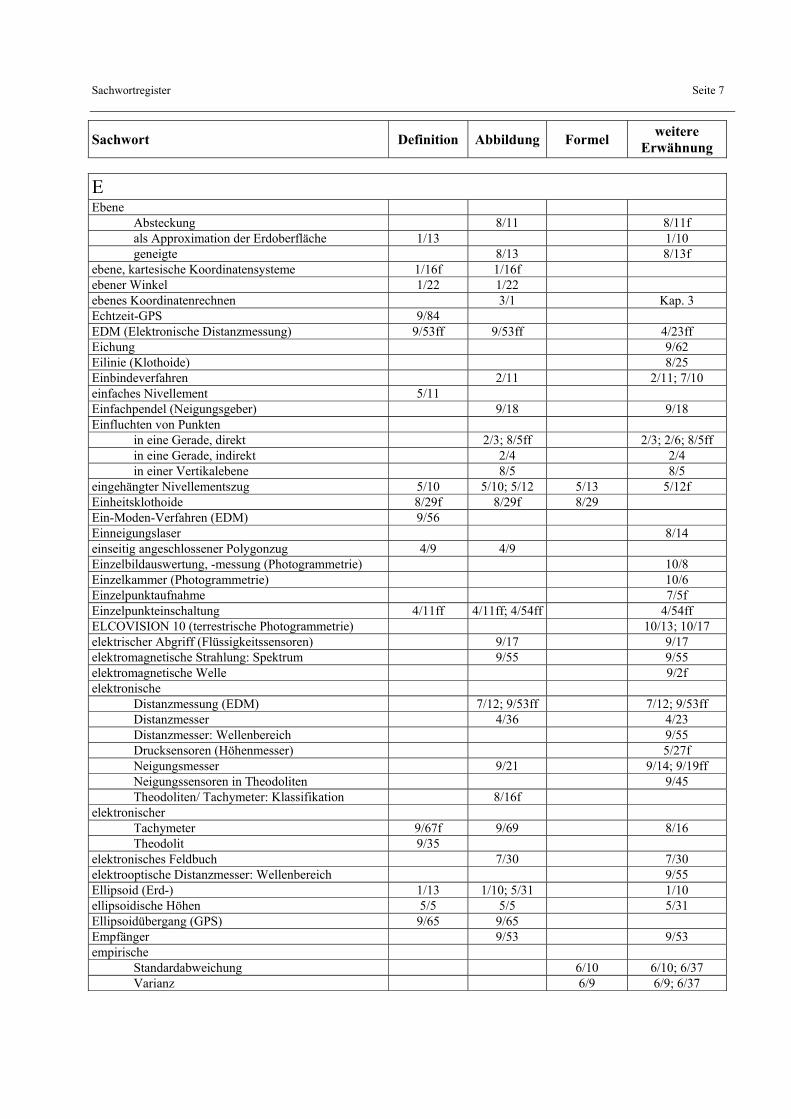
Sachwortregister Seite 7
Sachwort Definition Abbildung Formel weitere Erwähnung
E Ebene Absteckung 8/11 8/11f als Approximation der Erdoberfläche 1/13 1/10 geneigte 8/13 8/13f ebene, kartesische Koordinatensysteme 1/16f 1/16f ebener Winkel 1/22 1/22 ebenes Koordinatenrechnen 3/1 Kap. 3 Echtzeit-GPS 9/84 EDM (Elektronische Distanzmessung) 9/53ff 9/53ff 4/23ff Eichung 9/62 Eilinie (Klothoide) 8/25 Einbindeverfahren 2/11 2/11; 7/10 einfaches Nivellement 5/11 Einfachpendel (Neigungsgeber) 9/18 9/18 Einfluchten von Punkten in eine Gerade, direkt 2/3; 8/5ff 2/3; 2/6; 8/5ff in eine Gerade, indirekt 2/4 2/4 in einer Vertikalebene 8/5 8/5 eingehängter Nivellementszug 5/10 5/10; 5/12 5/13 5/12f Einheitsklothoide 8/29f 8/29f 8/29 Ein-Moden-Verfahren (EDM) 9/56 Einneigungslaser 8/14 einseitig angeschlossener Polygonzug 4/9 4/9 Einzelbildauswertung, -messung (Photogrammetrie) 10/8 Einzelkammer (Photogrammetrie) 10/6 Einzelpunktaufnahme 7/5f Einzelpunkteinschaltung 4/11ff 4/11ff; 4/54ff 4/54ff ELCOVISION 10 (terrestrische Photogrammetrie) 10/13; 10/17 elektrischer Abgriff (Flüssigkeitssensoren) 9/17 9/17 elektromagnetische Strahlung: Spektrum 9/55 9/55 elektromagnetische Welle 9/2f elektronische Distanzmessung (EDM) 7/12; 9/53ff 7/12; 9/53ff Distanzmesser 4/36 4/23 Distanzmesser: Wellenbereich 9/55 Drucksensoren (Höhenmesser) 5/27f Neigungsmesser 9/21 9/14; 9/19ff Neigungssensoren in Theodoliten 9/45 Theodoliten/ Tachymeter: Klassifikation 8/16f elektronischer Tachymeter 9/67f 9/69 8/16 Theodolit 9/35 elektronisches Feldbuch 7/30 7/30 elektrooptische Distanzmesser: Wellenbereich 9/55 Ellipsoid (Erd-) 1/13 1/10; 5/31 1/10 ellipsoidische Höhen 5/5 5/5 5/31 Ellipsoidübergang (GPS) 9/65 9/65 Empfänger 9/53 9/53 empirische Standardabweichung 6/10 6/10; 6/37 Varianz 6/9 6/9; 6/37
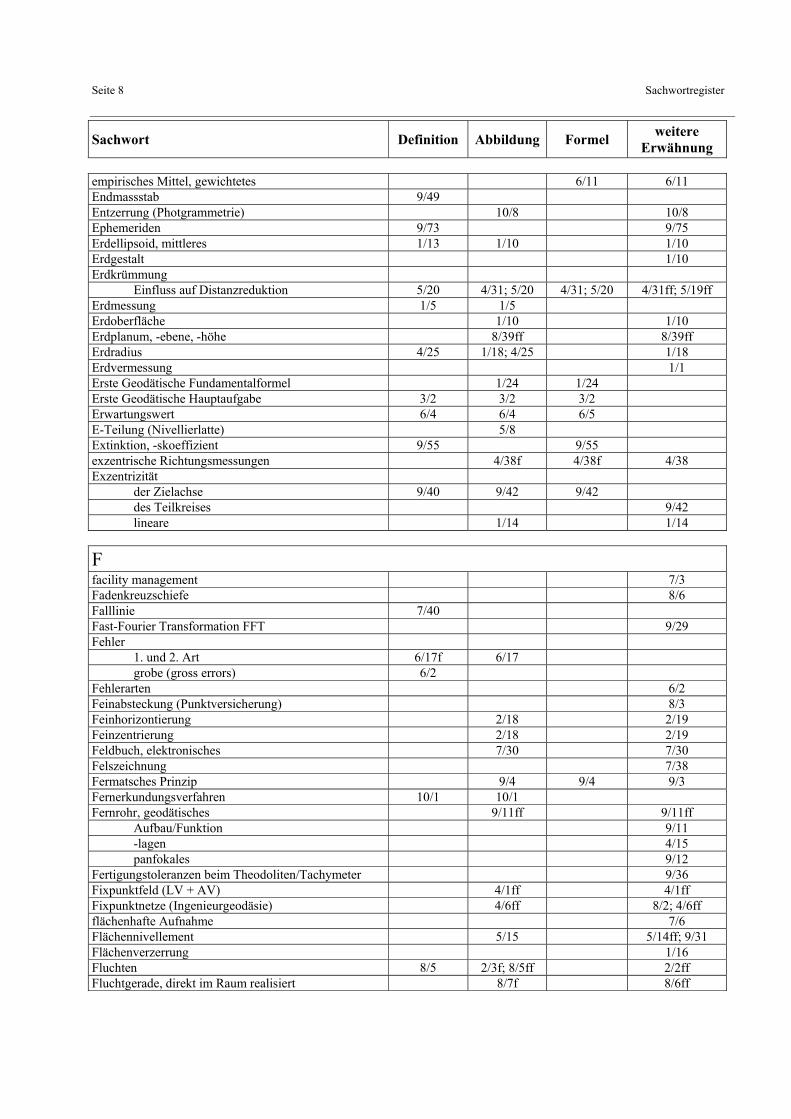
Seite 8 Sachwortregister
Sachwort Definition Abbildung Formel weitere Erwähnung
empirisches Mittel, gewichtetes 6/11 6/11 Endmassstab 9/49 Entzerrung (Photgrammetrie) 10/8 10/8 Ephemeriden 9/73 9/75 Erdellipsoid, mittleres 1/13 1/10 1/10 Erdgestalt 1/10 Erdkrümmung Einfluss auf Distanzreduktion 5/20 4/31; 5/20 4/31; 5/20 4/31ff; 5/19ff Erdmessung 1/5 1/5 Erdoberfläche 1/10 1/10 Erdplanum, -ebene, -höhe 8/39ff 8/39ff Erdradius 4/25 1/18; 4/25 1/18 Erdvermessung 1/1 Erste Geodätische Fundamentalformel 1/24 1/24 Erste Geodätische Hauptaufgabe 3/2 3/2 3/2 Erwartungswert 6/4 6/4 6/5 E-Teilung (Nivellierlatte) 5/8 Extinktion, -skoeffizient 9/55 9/55 exzentrische Richtungsmessungen 4/38f 4/38f 4/38 Exzentrizität der Zielachse 9/40 9/42 9/42 des Teilkreises 9/42 lineare 1/14 1/14
F facility management 7/3 Fadenkreuzschiefe 8/6 Falllinie 7/40 Fast-Fourier Transformation FFT 9/29 Fehler 1. und 2. Art 6/17f 6/17 grobe (gross errors) 6/2 Fehlerarten 6/2 Feinabsteckung (Punktversicherung) 8/3 Feinhorizontierung 2/18 2/19 Feinzentrierung 2/18 2/19 Feldbuch, elektronisches 7/30 7/30 Felszeichnung 7/38 Fermatsches Prinzip 9/4 9/4 9/3 Fernerkundungsverfahren 10/1 10/1 Fernrohr, geodätisches 9/11ff 9/11ff Aufbau/Funktion 9/11 -lagen 4/15 panfokales 9/12 Fertigungstoleranzen beim Theodoliten/Tachymeter 9/36 Fixpunktfeld (LV + AV) 4/1ff 4/1ff Fixpunktnetze (Ingenieurgeodäsie) 4/6ff 8/2; 4/6ff flächenhafte Aufnahme 7/6 Flächennivellement 5/15 5/14ff; 9/31 Flächenverzerrung 1/16 Fluchten 8/5 2/3f; 8/5ff 2/2ff Fluchtgerade, direkt im Raum realisiert 8/7f 8/6ff
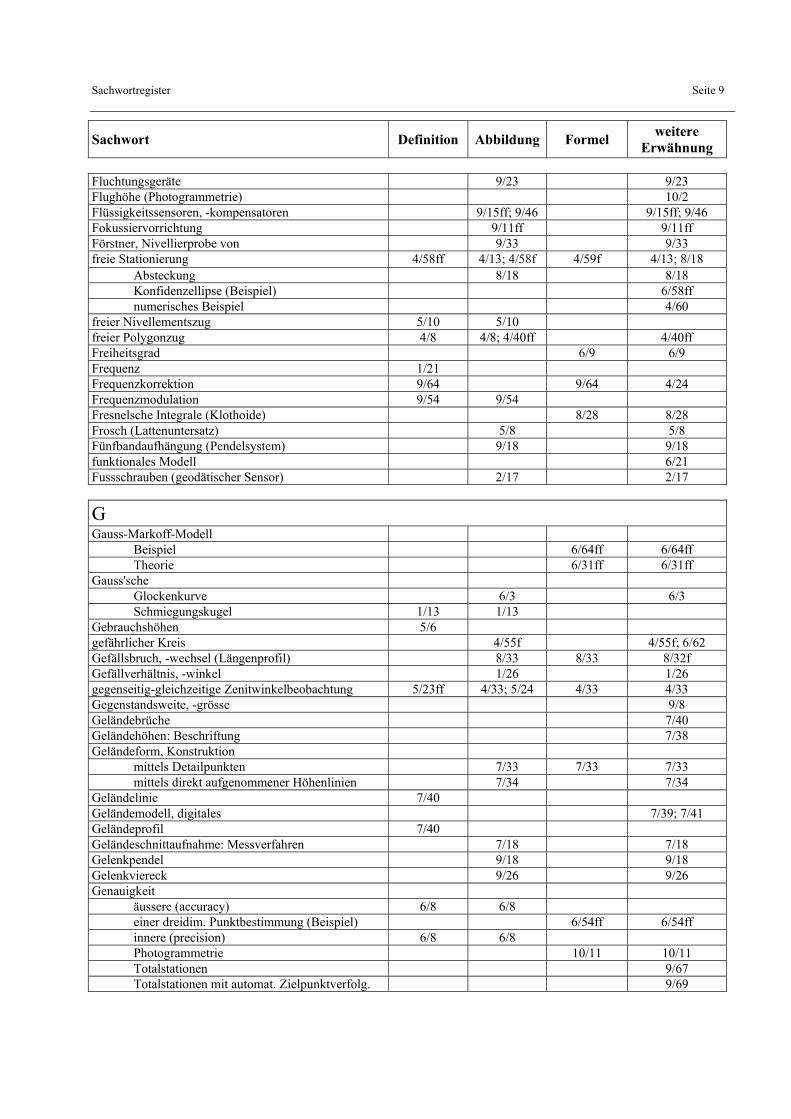
Sachwortregister Seite 9
Sachwort Definition Abbildung Formel weitere Erwähnung
Fluchtungsgeräte 9/23 9/23 Flughöhe (Photogrammetrie) 10/2 Flüssigkeitssensoren, -kompensatoren 9/15ff; 9/46 9/15ff; 9/46 Fokussiervorrichtung 9/11ff 9/11ff Förstner, Nivellierprobe von 9/33 9/33 freie Stationierung 4/58ff 4/13; 4/58f 4/59f 4/13; 8/18 Absteckung 8/18 8/18 Konfidenzellipse (Beispiel) 6/58ff numerisches Beispiel 4/60 freier Nivellementszug 5/10 5/10 freier Polygonzug 4/8 4/8; 4/40ff 4/40ff Freiheitsgrad 6/9 6/9 Frequenz 1/21 Frequenzkorrektion 9/64 9/64 4/24 Frequenzmodulation 9/54 9/54 Fresnelsche Integrale (Klothoide) 8/28 8/28 Frosch (Lattenuntersatz) 5/8 5/8 Fünfbandaufhängung (Pendelsystem) 9/18 9/18 funktionales Modell 6/21 Fussschrauben (geodätischer Sensor) 2/17 2/17
G Gauss-Markoff-Modell Beispiel 6/64ff 6/64ff Theorie 6/31ff 6/31ff Gauss'sche Glockenkurve 6/3 6/3 Schmiegungskugel 1/13 1/13 Gebrauchshöhen 5/6 gefährlicher Kreis 4/55f 4/55f; 6/62 Gefällsbruch, -wechsel (Längenprofil) 8/33 8/33 8/32f Gefällverhältnis, -winkel 1/26 1/26 gegenseitig-gleichzeitige Zenitwinkelbeobachtung 5/23ff 4/33; 5/24 4/33 4/33 Gegenstandsweite, -grösse 9/8 Geländebrüche 7/40 Geländehöhen: Beschriftung 7/38 Geländeform, Konstruktion mittels Detailpunkten 7/33 7/33 7/33 mittels direkt aufgenommener Höhenlinien 7/34 7/34 Geländelinie 7/40 Geländemodell, digitales 7/39; 7/41 Geländeprofil 7/40 Geländeschnittaufnahme: Messverfahren 7/18 7/18 Gelenkpendel 9/18 9/18 Gelenkviereck 9/26 9/26 Genauigkeit äussere (accuracy) 6/8 6/8 einer dreidim. Punktbestimmung (Beispiel) 6/54ff 6/54ff innere (precision) 6/8 6/8 Photogrammetrie 10/11 10/11 Totalstationen 9/67 Totalstationen mit automat. Zielpunktverfolg. 9/69
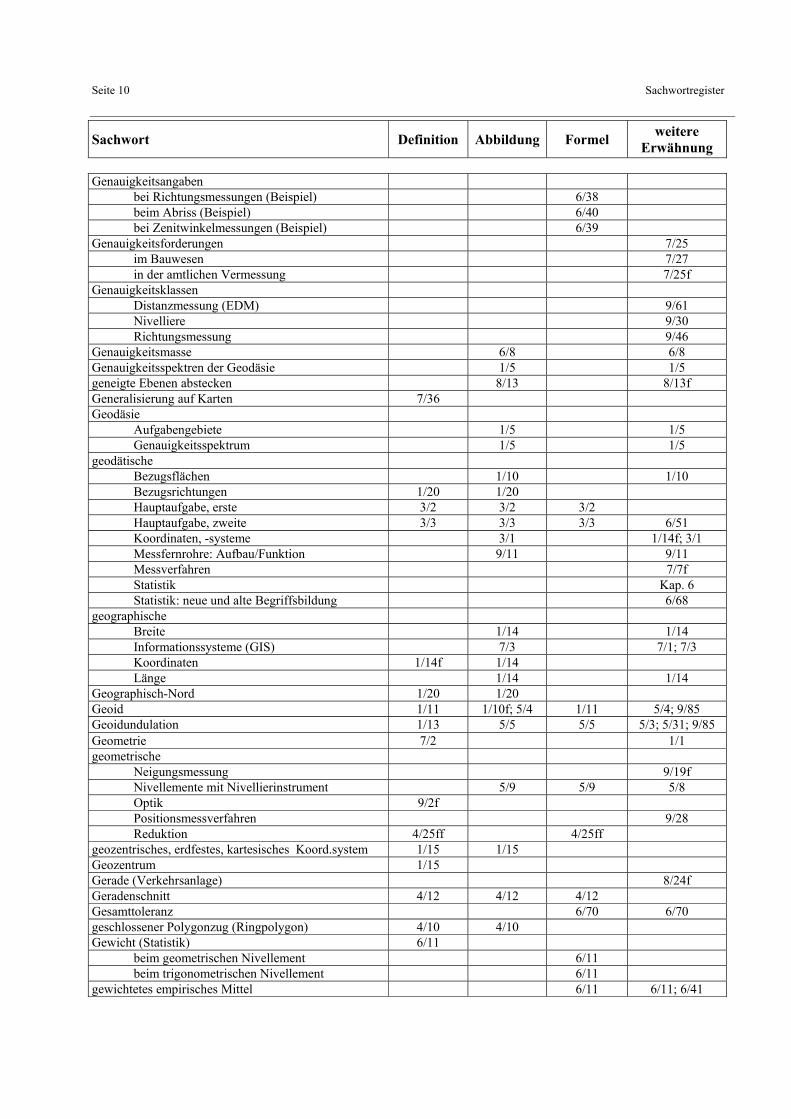
Seite 10 Sachwortregister
Sachwort Definition Abbildung Formel weitere Erwähnung
Genauigkeitsangaben bei Richtungsmessungen (Beispiel) 6/38 beim Abriss (Beispiel) 6/40 bei Zenitwinkelmessungen (Beispiel) 6/39 Genauigkeitsforderungen 7/25 im Bauwesen 7/27 in der amtlichen Vermessung 7/25f Genauigkeitsklassen Distanzmessung (EDM) 9/61 Nivelliere 9/30 Richtungsmessung 9/46 Genauigkeitsmasse 6/8 6/8 Genauigkeitsspektren der Geodäsie 1/5 1/5 geneigte Ebenen abstecken 8/13 8/13f Generalisierung auf Karten 7/36 Geodäsie Aufgabengebiete 1/5 1/5 Genauigkeitsspektrum 1/5 1/5 geodätische Bezugsflächen 1/10 1/10 Bezugsrichtungen 1/20 1/20 Hauptaufgabe, erste 3/2 3/2 3/2 Hauptaufgabe, zweite 3/3 3/3 3/3 6/51 Koordinaten, -systeme 3/1 1/14f; 3/1 Messfernrohre: Aufbau/Funktion 9/11 9/11 Messverfahren 7/7f Statistik Kap. 6 Statistik: neue und alte Begriffsbildung 6/68 geographische Breite 1/14 1/14 Informationssysteme (GIS) 7/3 7/1; 7/3 Koordinaten 1/14f 1/14 Länge 1/14 1/14 Geographisch-Nord 1/20 1/20 Geoid 1/11 1/10f; 5/4 1/11 5/4; 9/85 Geoidundulation 1/13 5/5 5/5 5/3; 5/31; 9/85 Geometrie 7/2 1/1 geometrische Neigungsmessung 9/19f Nivellemente mit Nivellierinstrument 5/9 5/9 5/8 Optik 9/2f Positionsmessverfahren 9/28 Reduktion 4/25ff 4/25ff geozentrisches, erdfestes, kartesisches Koord.system 1/15 1/15 Geozentrum 1/15 Gerade (Verkehrsanlage) 8/24f Geradenschnitt 4/12 4/12 4/12 Gesamttoleranz 6/70 6/70 geschlossener Polygonzug (Ringpolygon) 4/10 4/10 Gewicht (Statistik) 6/11 beim geometrischen Nivellement 6/11 beim trigonometrischen Nivellement 6/11 gewichtetes empirisches Mittel 6/11 6/11; 6/41
Sachwortregister Seite 11
Sachwort Definition Abbildung Formel weitere Erwähnung
Gewichtsmatrix 6/29 6/29ff Gittermethode (Vermaschung), DTM 7/41 Glas, optisches 9/8 gleichsinnige Koordinatenrotation 3/6 3/6 3/6 Global Positioning System GPS 9/71ff Aufnahmeverfahren 7/9 Auswerteverfahren 9/78 Beobachtungsverfahren 9/82f Höhenbestimmung 5/31 Kontrollsegment 9/73 -Koordinaten: Transformation 9/85 9/84 -Landesnetz LV 95 1/5; 4/2 4/1 Messprinzipien 9/76 9/75f Möglichkeiten der Positionsbestimmung 9/82f Nutzersegement 9/73f 9/74 Phasenmessung 9/77 9/77 post processing 9/77 Prinzip der relativen Punktbestimmung 9/77 9/77 Pseudoentfernungsmessung 9/76 9/76 9/71f -Satellitenempfänger 9/86 Signalstruktur 9/55; 9/74 Trägerfrequenz 9/74 Weltraumsegment 9/72 9/72 GLONASS 9/87 9/71 GMT im interdisziplinären Kontext 1/8 1/8 Gon 1/22 1/22 graphisches Werk 2/10 Gratlinie 7/40 7/35 Grenzabmass 6/69 6/69 grobe Fehler (gross errors) 6/2 6/26 Grösstmass 6/69 6/69 Grobhorizontierung 2/18 2/18 Grobzentrierung 2/18 2/18 Gruber-Verfahren (Photogrammetrie) 10/10 10/10 Gruberpunkte: Anordnung 10/10 Grundbuchplan (Beispiel) 7/23 7/23 Grundtransformationen 3/6ff 3/6ff 3/6ff Gruppenbrechungsindex, -zahl 9/66 9/66 Gruppengeschwindigkeit 9/66
H Halbsatz 4/15 Handgefällmesser 2/9 2/9 Hand-Laser-Meter 7/12 7/12 Handriss (AV) 2/10 Hauptaufgabe erste geodätische 3/2 3/2 3/2 zweite geodätische 3/3 3/3 3/3 6/51 Hauptaufgaben: Kontrollrechnung 3/3 Hauptpunkt (Photogrammetrie) 10/4 10/4 Hayford-Ellipsoid 1/12 Helmert-2D 3/8 3/8 3/9
Seite 12 Sachwortregister
Sachwort Definition Abbildung Formel weitere Erwähnung
Helmerttransformation freie Stationierung 4/59f 4/59ff Polygonzug 4/42ff 4/42ff Hidden Point (Stab) 7/16 7/8; 7/16; 7/24 Höhen Anforderung an Definition 5/3 5/3 ellipsoidische 5/5 5/5 5/5 9/85 orthometrische 5/4 5/4; 5/5 Normal- 5/4 5/4 Höhenabsteckung 8/11ff 8/11ff 8/39ff mit Visieren 8/8 8/8 Höhenbestimmung Kap. 5 Methodenübersicht 5/1 mit GPS 5/31 trigonometrische 5/19ff 5/19ff 5/19 Höhenbezugsfläche 5/3 Höhendatum der Schweiz 5/6 5/6 Höhendefinition: Anforderungen 5/3 Höhendifferenzen 5/17 5/17 Höhengenauigkeit (Photogrammetrie) 10/2 10/2 Höhenindexlibelle 4/16; 9/46 4/16f; 9/45 Höhenindexabweichung 4/16 4/16f 4/16f 9/46 Höheninterpolation 7/33 7/33 Höhenkote 7/37 7/37 Höhenlinie 7/37 7/37f Höhenlinienlaufen 7/34 7/34 Höhenmessung, barometrische 5/27 5/27 Höhenmodell, digitales 7/40f 7/39f Höhennetze in der Schweiz 5/6 5/6f Höhensysteme 5/2ff Höhenübertragung hydrostatisch 5/30 im Hochbau 8/23 8/23 Höhenunterschied beim Nivellement 5/8ff 5/9 5/8ff Höhenverzeichnis 5/7 Höhenwinkel 4/14ff 4/14ff Höhere Geodäsie 1/5 Hohlspiegel 9/9 Homogenität 1/9 Horizontalachse beim Theodoliten 9/36 9/35ff bei Verkehrsanlagen (inkl. Linienführung) 8/24ff 8/24ff 8/24ff Horizontaldistanz, -messung 4/28ff 4/28ff 4/28ff; 4/35 Erdkrümmung/Refraktion 4/31 4/31; 4/35 4/31ff horizontale Ebenen abstecken 8/11 8/11f Linienführung 8/24ff Linienführung: Beispiel 8/30 8/30 Richtungsmessung 4/14ff 4/14 Horizontalkreis 4/14 4/14 Horizontalpendel 9/19 9/19 Horizontalwinkel 4/14 Horizontierung eines geodätischen Sensors 2/17 2/17
Sachwortregister Seite 13
Sachwort Definition Abbildung Formel weitere Erwähnung
HOW (Übergangswort, GPS) 9/75 hydrodynamisches Nivellement 5/33 hydrostatisches Nivellement 5/29 5/29 5/29f Hypothesentest Beispiel 6/66 6/66 mit Vertrauensintervall 6/16 Hysterese 9/27 9/27
I Impulsdeformation 9/58 Impulslaufzeitverfahren 9/58 9/58 9/58 Impulsmessverfahren 9/58 9/58 9/58 Inclinometer (elektronischer Neigungsmesser) 9/19ff 9/19f 9/14 Indexabweichung 4/16 4/17 4/16f 9/45f indirekte Absteckungsverfahren 8/19 8/19 Industrieanlage: Netzanlage 4/7 4/7 Industrieanlagen und Baubereich (Messverfahren) 7/22 Industriemesstechnik 1/6 1/6 Infrarotlaserdiode (Rotationslaser) 9/31 9/31 Ingenieurgeodäsie 1/6 1/6 Fixpunktnetze 4/6f Inklination 9/72 inkrementaler Winkelabgriff 9/43f 9/43f Innenfokussierung 9/11 9/11 innere Genauigkeit 6/8 6/8 Orientierung (Photogrammetrie) 10/5 Instrumente der geodätischen Messtechnik Kap. 9 zur Neigungsmessung 9/15ff 9/14ff instrumentell bedingte Korrektionen (EDM) 9/62ff 9/63ff 9/64ff 4/24; 4/35 Instrumentenabweichungen 9/42 Instrumentenhorizont (Nivellier) 5/15 5/15 Instrumentenklassifikation (Theodoliten/Tachymeter) 8/16f 8/16 Intensitätsverlust elektromagnetischer Strahlung 9/55 Interferenz 9/56 Interferenzkomparator nach Väisälä 9/57 Interferometer 9/56f 9/56 9/56 International Association of Geodesy (IAG) 1/11 Internationale Union f. Geodäsie u. Geophysik (IUGG) 1/12 Internationales Einheitensystem (SI) 1/21 Interpolation bei Höhenlinien 7/33; 7/42 Invardraht 9/50 ionosphere-free solution (GPS) 9/79 Isogonenkarte 1/20 Isohypse (Höhenlinie) 7/37 7/37 Istabmass, Istmass 6/69 6/69 IUGG-Ellipsoid 1/12
Seite 14 Sachwortregister
Sachwort Definition Abbildung Formel weitere Erwähnung
J Jalon 2/1f 2/1f Jordan'sche Formel 6/23 6/23 Justierung 9/62 Libelle bei gleichzeit. Horizontierg. einer Ebene 9/22 9/22 Neigungssensoren 9/21 9/21 Nivellierinstrumenten 9/31ff 9/32ff 9/32ff Rotationslasernivelliers 9/34 9/34
K Kalibrierung 9/62 6/4 Kalibrierungsprotokoll (Photogrammetrie) 10/5 Kamera (Photogrammetrie) metrische 10/4 terrestrische 10/6 Kameratypen (Photogrammetrie) 10/6 Kammerkonstante (Photogrammetrie) 10/4 10/2 Kanalbaulaser 8/7f 8/7f Kanten (Zeiss-Codelatten) 9/30 Kantung (Photogrammetrie) 10/5 Karte 7/36 7/4 Karten-Nord 1/20 1/20 4/14 Kartographie 7/3 kartographische Deklination 1/20 1/20 Kataster 7/3; 7/23 Katastervermessung 1/6; 7/23 Kathetenzuschlagsformel 1/25 1/25 Keil, optischer 9/7 9/7 9/7 Kennlinie von elektronischen Neigungssensoren 9/21 9/21 Kilometrierung 7/17; 8/30f kinematic (GPS) 9/84 Kippachsabweichung 9/38f 9/38 9/38f 9/42 Kippachse 9/35 9/36 Kleinpunktberechnung 3/13 3/13 Kleinstmass 6/69 6/69 Klimatologie 7/3 Klothoide 8/27 8/25ff 8/27 8/51 Eigenschaften 8/27 8/27 Parameter 8/27; 8/29 8/27 Wahl 8/30 8/29 8/29 Koeffizientenmatrix 6/31 Kofaktorenmatrix 6/29 6/29 Kohärenzlänge 9/57 Koinzidenzlibelle 9/17 9/17 Kollimationsfehler 9/37 9/37 9/37 9/42 Kollimator 9/34 9/34 Koma (Abbildungsfehler) 9/10 9/10 Komparator 9/21 9/21; 10/13 Komparatorkoordinaten (Photogrammetrie) 10/8 Kompensationsrestabweichung 9/27 9/27 Kompensationskoeffizient 9/26 9/26

Sachwortregister Seite 15
Sachwort Definition Abbildung Formel weitere Erwähnung
Kompensator 9/19; 9/26 9/19; 9/26 in Theodoliten 9/46 9/45 Kompensatoreinspielabweichung 9/27 Kompensatornivellier 9/26 9/26 Konfidenzband 6/23f; 6/59 6/23; 6/59 6/22; 6/59 Konfidenzellipse 6/20f 6/20; 6/24 6/21 graphische Konstruktion 6/22ff 6/23ff; 6/59ff 6/23ff; 6/59ff 6/58ff Konfidenzintervall, -zahl 6/14f 6/14f Kongruenzsätze 4/23 konkave Linsen 9/8f 9/8f Neigungswechsel 8/33 8/32ff Kontrolle Absteckung 8/4; 8/44 Aufnahme 7/28 Kontrollkarte (Vertrauensintervall) 6/17 6/17 Kontrollprinzip 1/9 Kontrollrechnung für Hauptaufgaben 3/3 Kontrollsegment beim NAVSTAR-GPS 9/73 9/73 konvexe Linsen 9/8 konvexe Neigungswechsel 8/33 8/32ff Koord.berechnung mit Drehstreckung (Polygonzug) 4/42f 4/43ff 4/42ff Koordinatenschieber 7/31 7/31 Koordinatensystem geodätische 1/14 kartesisches 3/1 3/1 Schweiz 1/17 1/17 Koordinatentransformation 3/5 Beispiel 3/11 Koordinatograph 7/31 7/31 Korbbogen 8/25ff 8/26 8/26 Korrektionen geometrische 4/25ff 4/35 4/23 instrumentell bedingte 9/62 9/63f 4/35 4/23f; 4/35; 9/62 meteorologische 4/23ff 4/24; 9/66f 9/65ff Korrelation, -skoeffizient 6/13 6/13 6/13 9/29 Korrelationsverfahren 9/28 Kovarianz 6/29 Kovarianzmatrix 6/29 6/16; 6/29; 6/34 a posteriori 6/32 Krassowskij-Ellipsoid 1/12 Kreis, gefährlicher 4/55f 4/55f Kreisbogen 8/24ff 8/24f 8/24 8/50f Kreisbogenfolgen 8/25f 8/26 8/26 Kreiselmessung 8/20; 9/47 Krete (Gelände) 7/35 7/15 Kreuzfedergelenk 9/26 Krümmung 8/24f 8/25 8/24 Krümmungsbild 8/25; 8/27 8/27ff Kugeldistanz auf Höhe Null 4/26; 4/29 4/26ff Kugelreflektor 9/7 9/6 Kuppe 7/37 7/15; 7/40; 8/32ff
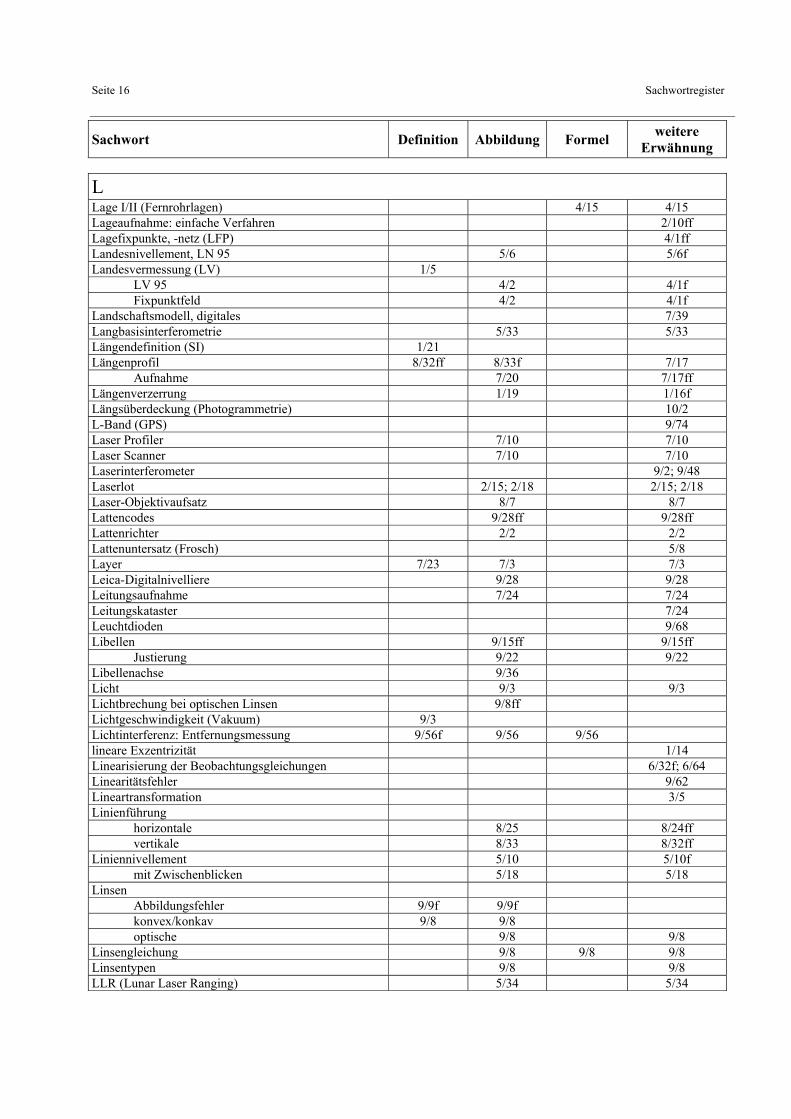
Seite 16 Sachwortregister
Sachwort Definition Abbildung Formel weitere Erwähnung
L Lage I/II (Fernrohrlagen) 4/15 4/15 Lageaufnahme: einfache Verfahren 2/10ff Lagefixpunkte, -netz (LFP) 4/1ff Landesnivellement, LN 95 5/6 5/6f Landesvermessung (LV) 1/5 LV 95 4/2 4/1f Fixpunktfeld 4/2 4/1f Landschaftsmodell, digitales 7/39 Langbasisinterferometrie 5/33 5/33 Längendefinition (SI) 1/21 Längenprofil 8/32ff 8/33f 7/17 Aufnahme 7/20 7/17ff Längenverzerrung 1/19 1/16f Längsüberdeckung (Photogrammetrie) 10/2 L-Band (GPS) 9/74 Laser Profiler 7/10 7/10 Laser Scanner 7/10 7/10 Laserinterferometer 9/2; 9/48 Laserlot 2/15; 2/18 2/15; 2/18 Laser-Objektivaufsatz 8/7 8/7 Lattencodes 9/28ff 9/28ff Lattenrichter 2/2 2/2 Lattenuntersatz (Frosch) 5/8 Layer 7/23 7/3 7/3 Leica-Digitalnivelliere 9/28 9/28 Leitungsaufnahme 7/24 7/24 Leitungskataster 7/24 Leuchtdioden 9/68 Libellen 9/15ff 9/15ff Justierung 9/22 9/22 Libellenachse 9/36 Licht 9/3 9/3 Lichtbrechung bei optischen Linsen 9/8ff Lichtgeschwindigkeit (Vakuum) 9/3 Lichtinterferenz: Entfernungsmessung 9/56f 9/56 9/56 lineare Exzentrizität 1/14 Linearisierung der Beobachtungsgleichungen 6/32f; 6/64 Linearitätsfehler 9/62 Lineartransformation 3/5 Linienführung horizontale 8/25 8/24ff vertikale 8/33 8/32ff Liniennivellement 5/10 5/10f mit Zwischenblicken 5/18 5/18 Linsen Abbildungsfehler 9/9f 9/9f konvex/konkav 9/8 9/8 optische 9/8 9/8 Linsengleichung 9/8 9/8 9/8 Linsentypen 9/8 9/8 LLR (Lunar Laser Ranging) 5/34 5/34
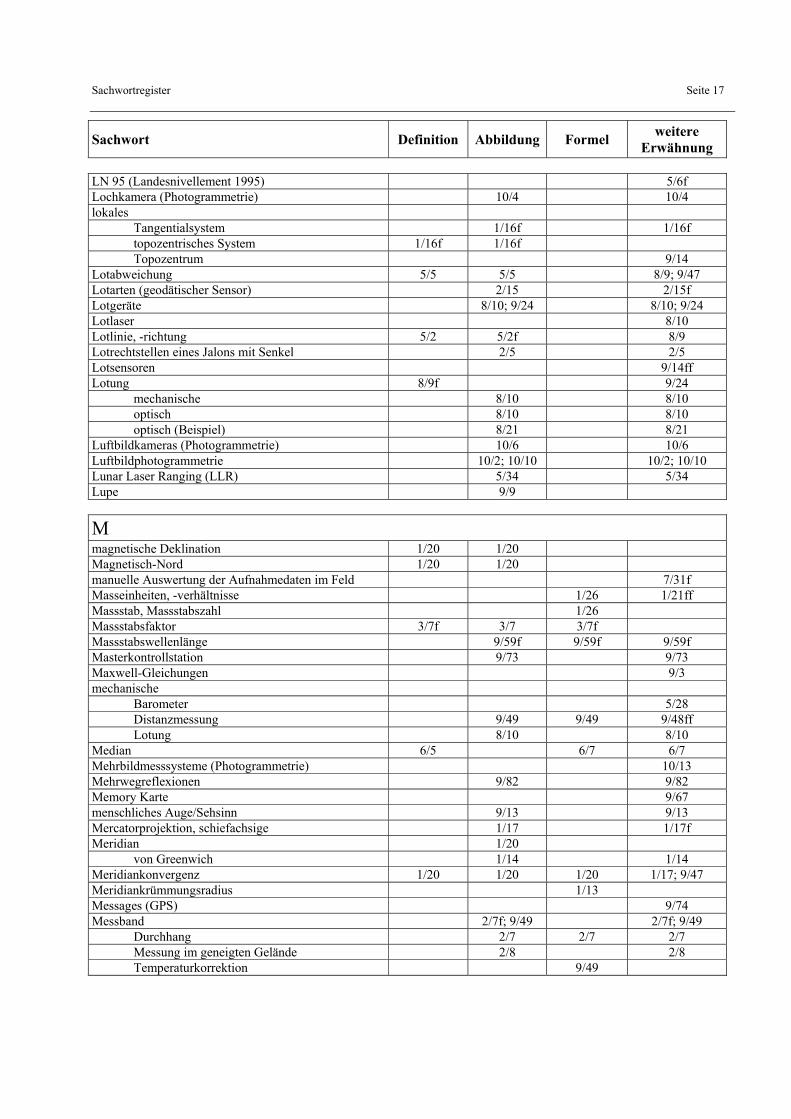
Sachwortregister Seite 17
Sachwort Definition Abbildung Formel weitere Erwähnung
LN 95 (Landesnivellement 1995) 5/6f Lochkamera (Photogrammetrie) 10/4 10/4 lokales Tangentialsystem 1/16f 1/16f topozentrisches System 1/16f 1/16f Topozentrum 9/14 Lotabweichung 5/5 5/5 8/9; 9/47 Lotarten (geodätischer Sensor) 2/15 2/15f Lotgeräte 8/10; 9/24 8/10; 9/24 Lotlaser 8/10 Lotlinie, -richtung 5/2 5/2f 8/9 Lotrechtstellen eines Jalons mit Senkel 2/5 2/5 Lotsensoren 9/14ff Lotung 8/9f 9/24 mechanische 8/10 8/10 optisch 8/10 8/10 optisch (Beispiel) 8/21 8/21 Luftbildkameras (Photogrammetrie) 10/6 10/6 Luftbildphotogrammetrie 10/2; 10/10 10/2; 10/10 Lunar Laser Ranging (LLR) 5/34 5/34 Lupe 9/9
M magnetische Deklination 1/20 1/20 Magnetisch-Nord 1/20 1/20 manuelle Auswertung der Aufnahmedaten im Feld 7/31f Masseinheiten, -verhältnisse 1/26 1/21ff Massstab, Massstabszahl 1/26 Massstabsfaktor 3/7f 3/7 3/7f Massstabswellenlänge 9/59f 9/59f 9/59f Masterkontrollstation 9/73 9/73 Maxwell-Gleichungen 9/3 mechanische Barometer 5/28 Distanzmessung 9/49 9/49 9/48ff Lotung 8/10 8/10 Median 6/5 6/7 6/7 Mehrbildmesssysteme (Photogrammetrie) 10/13 Mehrwegreflexionen 9/82 9/82 Memory Karte 9/67 menschliches Auge/Sehsinn 9/13 9/13 Mercatorprojektion, schiefachsige 1/17 1/17f Meridian 1/20 von Greenwich 1/14 1/14 Meridiankonvergenz 1/20 1/20 1/20 1/17; 9/47 Meridiankrümmungsradius 1/13 Messages (GPS) 9/74 Messband 2/7f; 9/49 2/7f; 9/49 Durchhang 2/7 2/7 2/7 Messung im geneigten Gelände 2/8 2/8 Temperaturkorrektion 9/49
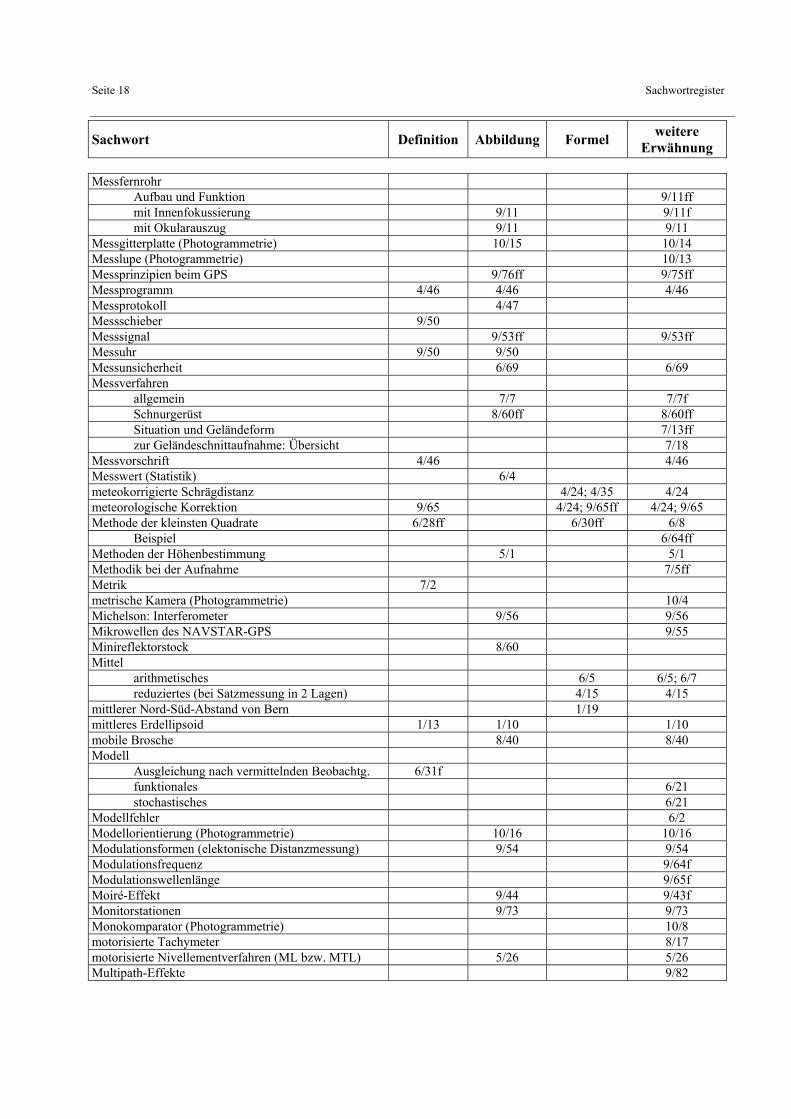
Seite 18 Sachwortregister
Sachwort Definition Abbildung Formel weitere Erwähnung
Messfernrohr Aufbau und Funktion 9/11ff mit Innenfokussierung 9/11 9/11f mit Okularauszug 9/11 9/11 Messgitterplatte (Photogrammetrie) 10/15 10/14 Messlupe (Photogrammetrie) 10/13 Messprinzipien beim GPS 9/76ff 9/75ff Messprogramm 4/46 4/46 4/46 Messprotokoll 4/47 Messschieber 9/50 Messsignal 9/53ff 9/53ff Messuhr 9/50 9/50 Messunsicherheit 6/69 6/69 Messverfahren allgemein 7/7 7/7f Schnurgerüst 8/60ff 8/60ff Situation und Geländeform 7/13ff zur Geländeschnittaufnahme: Übersicht 7/18 Messvorschrift 4/46 4/46 Messwert (Statistik) 6/4 meteokorrigierte Schrägdistanz 4/24; 4/35 4/24 meteorologische Korrektion 9/65 4/24; 9/65ff 4/24; 9/65 Methode der kleinsten Quadrate 6/28ff 6/30ff 6/8 Beispiel 6/64ff Methoden der Höhenbestimmung 5/1 5/1 Methodik bei der Aufnahme 7/5ff Metrik 7/2 metrische Kamera (Photogrammetrie) 10/4 Michelson: Interferometer 9/56 9/56 Mikrowellen des NAVSTAR-GPS 9/55 Minireflektorstock 8/60 Mittel arithmetisches 6/5 6/5; 6/7 reduziertes (bei Satzmessung in 2 Lagen) 4/15 4/15 mittlerer Nord-Süd-Abstand von Bern 1/19 mittleres Erdellipsoid 1/13 1/10 1/10 mobile Brosche 8/40 8/40 Modell Ausgleichung nach vermittelnden Beobachtg. 6/31f funktionales 6/21 stochastisches 6/21 Modellfehler 6/2 Modellorientierung (Photogrammetrie) 10/16 10/16 Modulationsformen (elektonische Distanzmessung) 9/54 9/54 Modulationsfrequenz 9/64f Modulationswellenlänge 9/65f Moiré-Effekt 9/44 9/43f Monitorstationen 9/73 9/73 Monokomparator (Photogrammetrie) 10/8 motorisierte Tachymeter 8/17 motorisierte Nivellementverfahren (ML bzw. MTL) 5/26 5/26 Multipath-Effekte 9/82
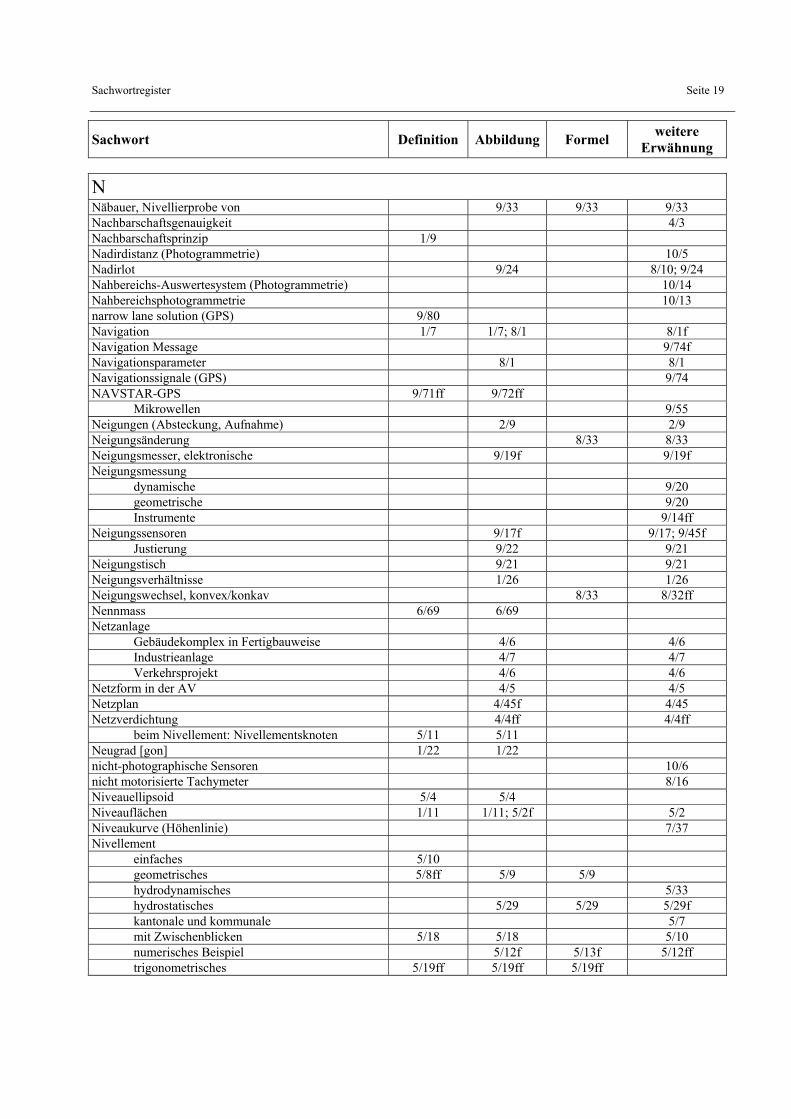
Sachwortregister Seite 19
Sachwort Definition Abbildung Formel weitere Erwähnung
N Näbauer, Nivellierprobe von 9/33 9/33 9/33 Nachbarschaftsgenauigkeit 4/3 Nachbarschaftsprinzip 1/9 Nadirdistanz (Photogrammetrie) 10/5 Nadirlot 9/24 8/10; 9/24 Nahbereichs-Auswertesystem (Photogrammetrie) 10/14 Nahbereichsphotogrammetrie 10/13 narrow lane solution (GPS) 9/80 Navigation 1/7 1/7; 8/1 8/1f Navigation Message 9/74f Navigationsparameter 8/1 8/1 Navigationssignale (GPS) 9/74 NAVSTAR-GPS 9/71ff 9/72ff Mikrowellen 9/55 Neigungen (Absteckung, Aufnahme) 2/9 2/9 Neigungsänderung 8/33 8/33 Neigungsmesser, elektronische 9/19f 9/19f Neigungsmessung dynamische 9/20 geometrische 9/20 Instrumente 9/14ff Neigungssensoren 9/17f 9/17; 9/45f Justierung 9/22 9/21 Neigungstisch 9/21 9/21 Neigungsverhältnisse 1/26 1/26 Neigungswechsel, konvex/konkav 8/33 8/32ff Nennmass 6/69 6/69 Netzanlage Gebäudekomplex in Fertigbauweise 4/6 4/6 Industrieanlage 4/7 4/7 Verkehrsprojekt 4/6 4/6 Netzform in der AV 4/5 4/5 Netzplan 4/45f 4/45 Netzverdichtung 4/4ff 4/4ff beim Nivellement: Nivellementsknoten 5/11 5/11 Neugrad [gon] 1/22 1/22 nicht-photographische Sensoren 10/6 nicht motorisierte Tachymeter 8/16 Niveauellipsoid 5/4 5/4 Niveauflächen 1/11 1/11; 5/2f 5/2 Niveaukurve (Höhenlinie) 7/37 Nivellement einfaches 5/10 geometrisches 5/8ff 5/9 5/9 hydrodynamisches 5/33 hydrostatisches 5/29 5/29 5/29f kantonale und kommunale 5/7 mit Zwischenblicken 5/18 5/18 5/10 numerisches Beispiel 5/12f 5/13f 5/12ff trigonometrisches 5/19ff 5/19ff 5/19ff
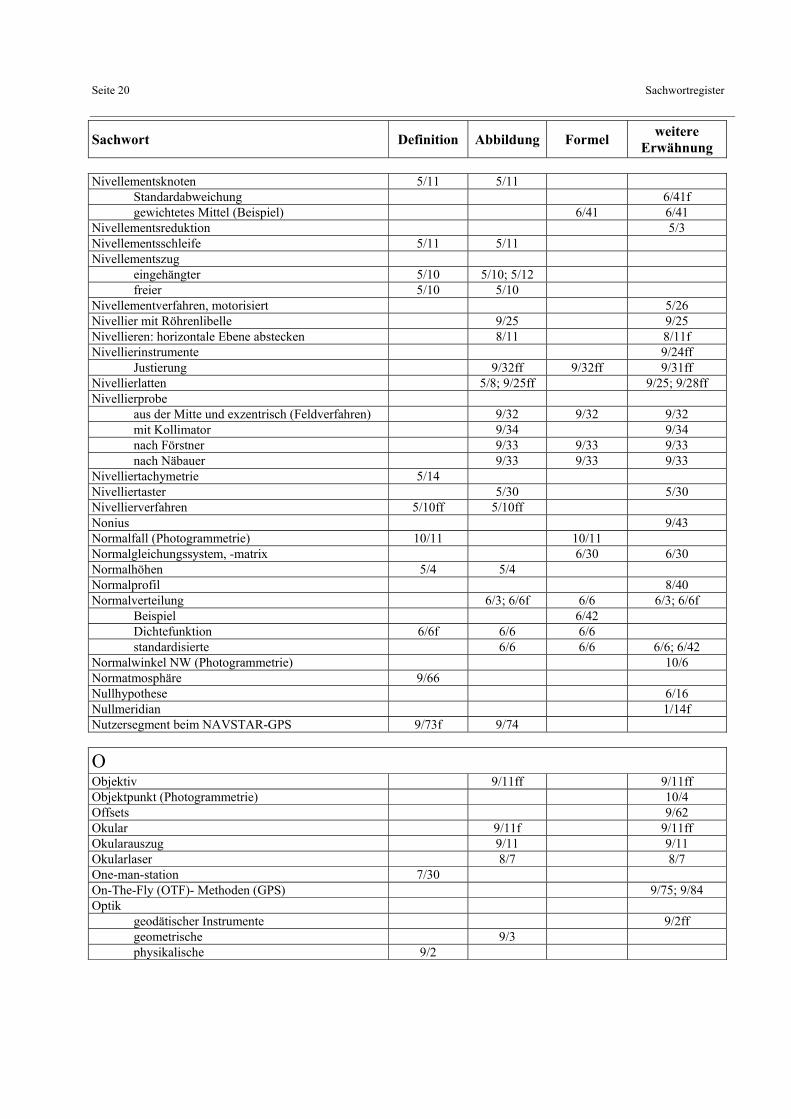
Seite 20 Sachwortregister
Sachwort Definition Abbildung Formel weitere Erwähnung
Nivellementsknoten 5/11 5/11 Standardabweichung 6/41f gewichtetes Mittel (Beispiel) 6/41 6/41 Nivellementsreduktion 5/3 Nivellementsschleife 5/11 5/11 Nivellementszug eingehängter 5/10 5/10; 5/12 freier 5/10 5/10 Nivellementverfahren, motorisiert 5/26 Nivellier mit Röhrenlibelle 9/25 9/25 Nivellieren: horizontale Ebene abstecken 8/11 8/11f Nivellierinstrumente 9/24ff Justierung 9/32ff 9/32ff 9/31ff Nivellierlatten 5/8; 9/25ff 9/25; 9/28ff Nivellierprobe aus der Mitte und exzentrisch (Feldverfahren) 9/32 9/32 9/32 mit Kollimator 9/34 9/34 nach Förstner 9/33 9/33 9/33 nach Näbauer 9/33 9/33 9/33 Nivelliertachymetrie 5/14 Nivelliertaster 5/30 5/30 Nivellierverfahren 5/10ff 5/10ff Nonius 9/43 Normalfall (Photogrammetrie) 10/11 10/11 Normalgleichungssystem, -matrix 6/30 6/30 Normalhöhen 5/4 5/4 Normalprofil 8/40 Normalverteilung 6/3; 6/6f 6/6 6/3; 6/6f Beispiel 6/42 Dichtefunktion 6/6f 6/6 6/6 standardisierte 6/6 6/6 6/6; 6/42 Normalwinkel NW (Photogrammetrie) 10/6 Normatmosphäre 9/66 Nullhypothese 6/16 Nullmeridian 1/14f Nutzersegment beim NAVSTAR-GPS 9/73f 9/74
O Objektiv 9/11ff 9/11ff Objektpunkt (Photogrammetrie) 10/4 Offsets 9/62 Okular 9/11f 9/11ff Okularauszug 9/11 9/11 Okularlaser 8/7 8/7 One-man-station 7/30 On-The-Fly (OTF)- Methoden (GPS) 9/75; 9/84 Optik geodätischer Instrumente 9/2ff geometrische 9/3 physikalische 9/2
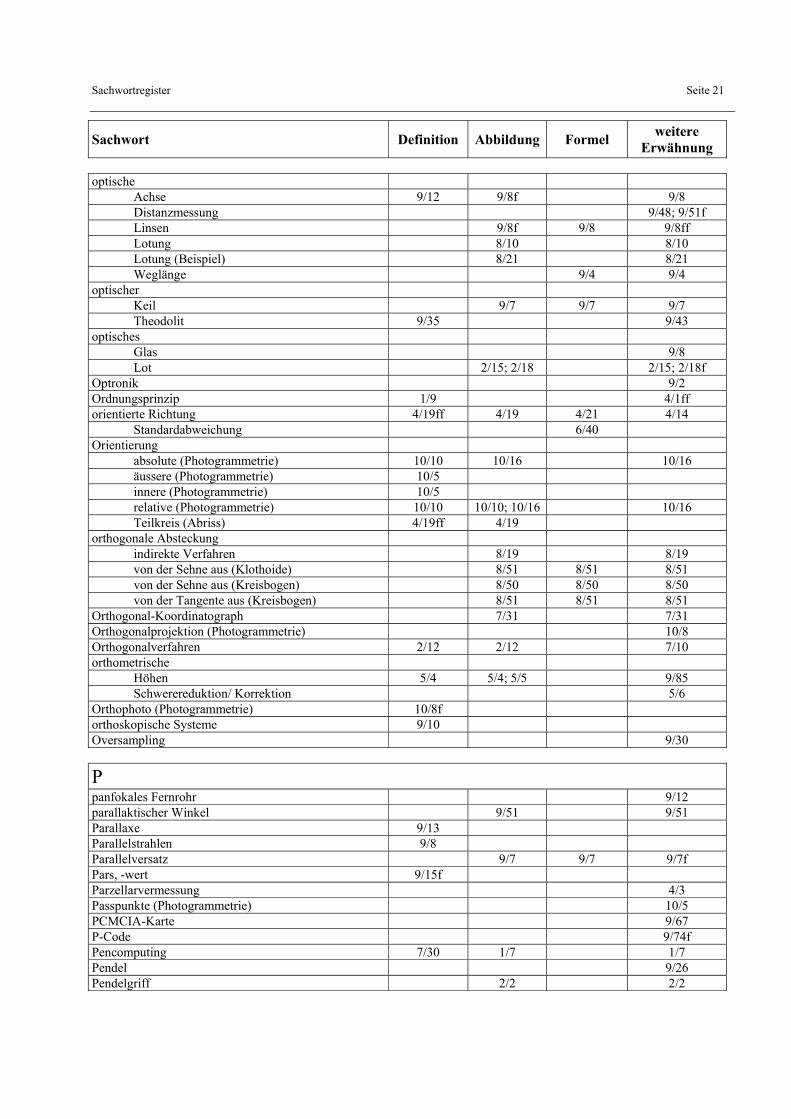
Sachwortregister Seite 21
Sachwort Definition Abbildung Formel weitere Erwähnung
optische Achse 9/12 9/8f 9/8 Distanzmessung 9/48; 9/51f Linsen 9/8f 9/8 9/8ff Lotung 8/10 8/10 Lotung (Beispiel) 8/21 8/21 Weglänge 9/4 9/4 optischer Keil 9/7 9/7 9/7 Theodolit 9/35 9/43 optisches Glas 9/8 Lot 2/15; 2/18 2/15; 2/18f Optronik 9/2 Ordnungsprinzip 1/9 4/1ff orientierte Richtung 4/19ff 4/19 4/21 4/14 Standardabweichung 6/40 Orientierung absolute (Photogrammetrie) 10/10 10/16 10/16 äussere (Photogrammetrie) 10/5 innere (Photogrammetrie) 10/5 relative (Photogrammetrie) 10/10 10/10; 10/16 10/16 Teilkreis (Abriss) 4/19ff 4/19 orthogonale Absteckung indirekte Verfahren 8/19 8/19 von der Sehne aus (Klothoide) 8/51 8/51 8/51 von der Sehne aus (Kreisbogen) 8/50 8/50 8/50 von der Tangente aus (Kreisbogen) 8/51 8/51 8/51 Orthogonal-Koordinatograph 7/31 7/31 Orthogonalprojektion (Photogrammetrie) 10/8 Orthogonalverfahren 2/12 2/12 7/10 orthometrische Höhen 5/4 5/4; 5/5 9/85 Schwerereduktion/ Korrektion 5/6 Orthophoto (Photogrammetrie) 10/8f orthoskopische Systeme 9/10 Oversampling 9/30
P panfokales Fernrohr 9/12 parallaktischer Winkel 9/51 9/51 Parallaxe 9/13 Parallelstrahlen 9/8 Parallelversatz 9/7 9/7 9/7f Pars, -wert 9/15f Parzellarvermessung 4/3 Passpunkte (Photogrammetrie) 10/5 PCMCIA-Karte 9/67 P-Code 9/74f Pencomputing 7/30 1/7 1/7 Pendel 9/26 Pendelgriff 2/2 2/2
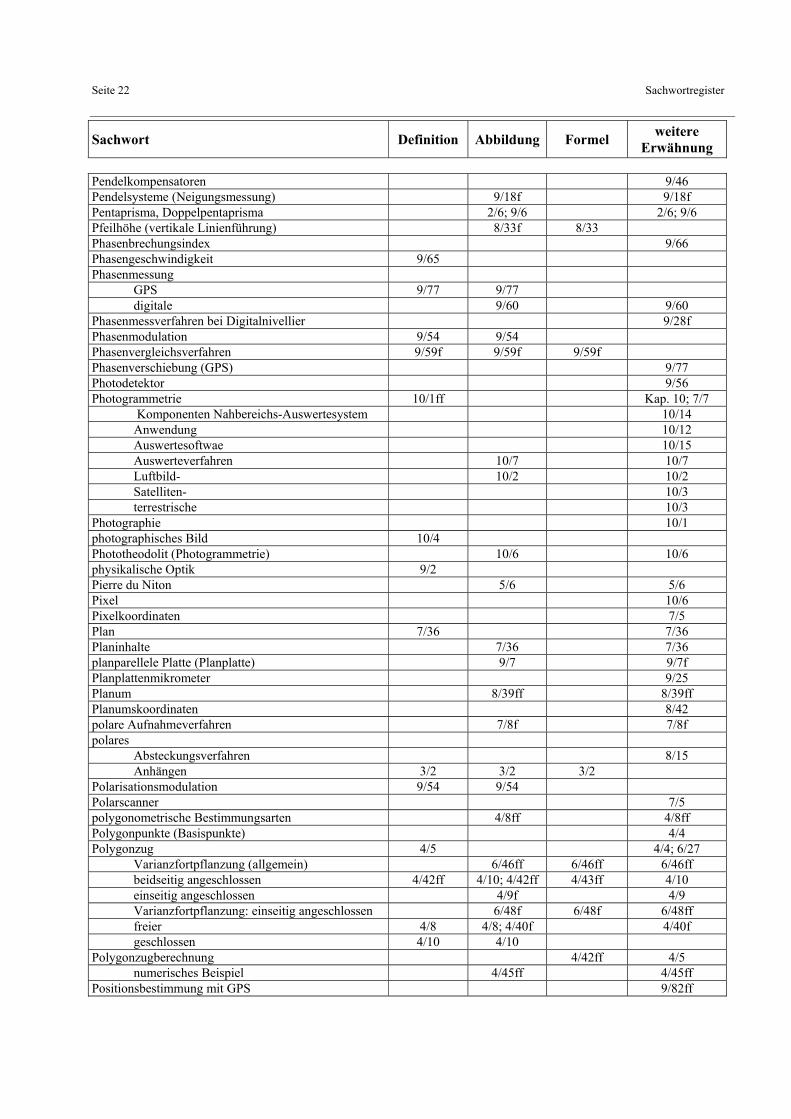
Seite 22 Sachwortregister
Sachwort Definition Abbildung Formel weitere Erwähnung
Pendelkompensatoren 9/46 Pendelsysteme (Neigungsmessung) 9/18f 9/18f Pentaprisma, Doppelpentaprisma 2/6; 9/6 2/6; 9/6 Pfeilhöhe (vertikale Linienführung) 8/33f 8/33 Phasenbrechungsindex 9/66 Phasengeschwindigkeit 9/65 Phasenmessung GPS 9/77 9/77 digitale 9/60 9/60 Phasenmessverfahren bei Digitalnivellier 9/28f Phasenmodulation 9/54 9/54 Phasenvergleichsverfahren 9/59f 9/59f 9/59f Phasenverschiebung (GPS) 9/77 Photodetektor 9/56 Photogrammetrie 10/1ff Kap. 10; 7/7 Komponenten Nahbereichs-Auswertesystem 10/14 Anwendung 10/12 Auswertesoftwae 10/15 Auswerteverfahren 10/7 10/7 Luftbild- 10/2 10/2 Satelliten- 10/3 terrestrische 10/3 Photographie 10/1 photographisches Bild 10/4 Phototheodolit (Photogrammetrie) 10/6 10/6 physikalische Optik 9/2 Pierre du Niton 5/6 5/6 Pixel 10/6 Pixelkoordinaten 7/5 Plan 7/36 7/36 Planinhalte 7/36 7/36 planparellele Platte (Planplatte) 9/7 9/7f Planplattenmikrometer 9/25 Planum 8/39ff 8/39ff Planumskoordinaten 8/42 polare Aufnahmeverfahren 7/8f 7/8f polares Absteckungsverfahren 8/15 Anhängen 3/2 3/2 3/2 Polarisationsmodulation 9/54 9/54 Polarscanner 7/5 polygonometrische Bestimmungsarten 4/8ff 4/8ff Polygonpunkte (Basispunkte) 4/4 Polygonzug 4/5 4/4; 6/27 Varianzfortpflanzung (allgemein) 6/46ff 6/46ff 6/46ff beidseitig angeschlossen 4/42ff 4/10; 4/42ff 4/43ff 4/10 einseitig angeschlossen 4/9f 4/9 Varianzfortpflanzung: einseitig angeschlossen 6/48f 6/48f 6/48ff freier 4/8 4/8; 4/40f 4/40f geschlossen 4/10 4/10 Polygonzugberechnung 4/42ff 4/5 numerisches Beispiel 4/45ff 4/45ff Positionsbestimmung mit GPS 9/82ff
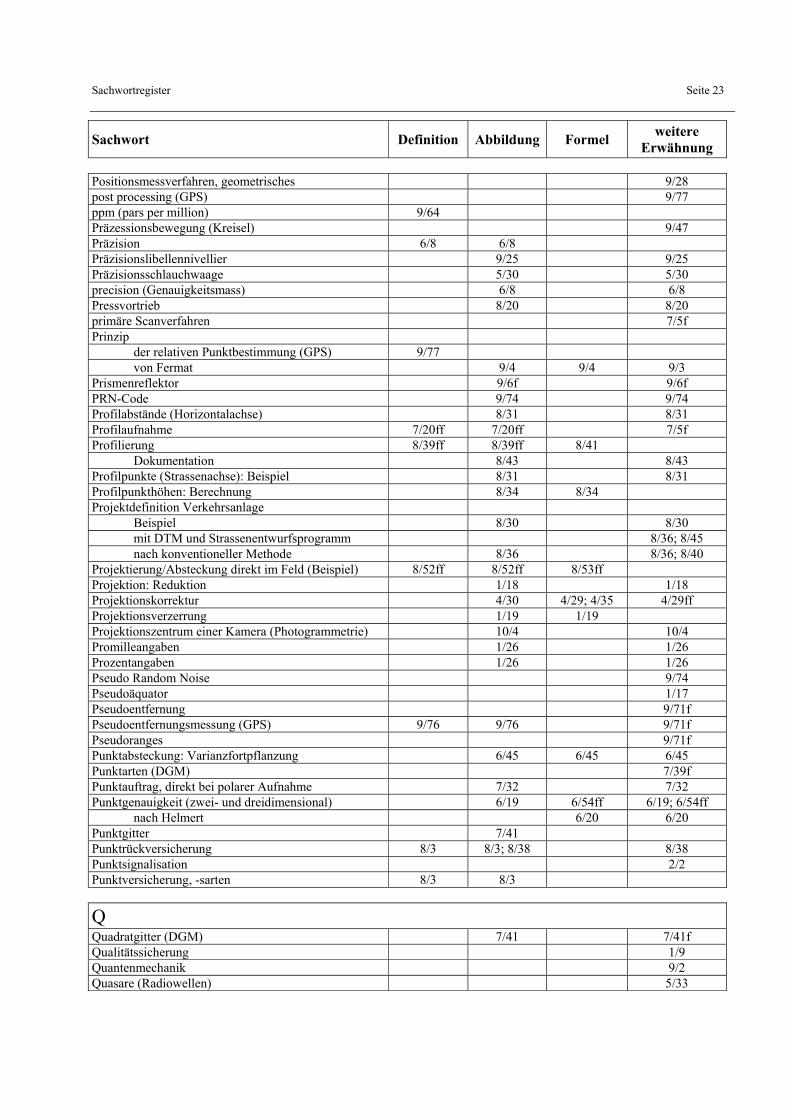
Sachwortregister Seite 23
Sachwort Definition Abbildung Formel weitere Erwähnung
Positionsmessverfahren, geometrisches 9/28 post processing (GPS) 9/77 ppm (pars per million) 9/64 Präzessionsbewegung (Kreisel) 9/47 Präzision 6/8 6/8 Präzisionslibellennivellier 9/25 9/25 Präzisionsschlauchwaage 5/30 5/30 precision (Genauigkeitsmass) 6/8 6/8 Pressvortrieb 8/20 8/20 primäre Scanverfahren 7/5f Prinzip der relativen Punktbestimmung (GPS) 9/77 von Fermat 9/4 9/4 9/3 Prismenreflektor 9/6f 9/6f PRN-Code 9/74 9/74 Profilabstände (Horizontalachse) 8/31 8/31 Profilaufnahme 7/20ff 7/20ff 7/5f Profilierung 8/39ff 8/39ff 8/41 Dokumentation 8/43 8/43 Profilpunkte (Strassenachse): Beispiel 8/31 8/31 Profilpunkthöhen: Berechnung 8/34 8/34 Projektdefinition Verkehrsanlage Beispiel 8/30 8/30 mit DTM und Strassenentwurfsprogramm 8/36; 8/45 nach konventioneller Methode 8/36 8/36; 8/40 Projektierung/Absteckung direkt im Feld (Beispiel) 8/52ff 8/52ff 8/53ff Projektion: Reduktion 1/18 1/18 Projektionskorrektur 4/30 4/29; 4/35 4/29ff Projektionsverzerrung 1/19 1/19 Projektionszentrum einer Kamera (Photogrammetrie) 10/4 10/4 Promilleangaben 1/26 1/26 Prozentangaben 1/26 1/26 Pseudo Random Noise 9/74 Pseudoäquator 1/17 Pseudoentfernung 9/71f Pseudoentfernungsmessung (GPS) 9/76 9/76 9/71f Pseudoranges 9/71f Punktabsteckung: Varianzfortpflanzung 6/45 6/45 6/45 Punktarten (DGM) 7/39f Punktauftrag, direkt bei polarer Aufnahme 7/32 7/32 Punktgenauigkeit (zwei- und dreidimensional) 6/19 6/54ff 6/19; 6/54ff nach Helmert 6/20 6/20 Punktgitter 7/41 Punktrückversicherung 8/3 8/3; 8/38 8/38 Punktsignalisation 2/2 Punktversicherung, -sarten 8/3 8/3
Q Quadratgitter (DGM) 7/41 7/41f Qualitätssicherung 1/9 Quantenmechanik 9/2 Quasare (Radiowellen) 5/33
Seite 24 Sachwortregister
Sachwort Definition Abbildung Formel weitere Erwähnung
Quasigeoid 5/4 5/4 quasi-simultane Methode des trigonom. Nivellements 5/24 5/24 Querabweichung bei ungenauer Winkelbestimmung 1/24 1/24 Querkrümmungsradius 1/13 1/13 Querprofil 7/17ff Aufnahme 7/21 7/17ff Querüberdeckung (Photogrammetrie) 10/2
R Radiant [rad] 1/22 1/22 Rahmenmarken (Photogrammetrie) 10/4 10/4; 10/8 random noise 6/3 6/19 rapid static (GPS) 9/83 Raster (Netzanlage) 4/6f 7/17 Rasteraufnahme 7/18ff 7/5; 7/17ff Rasterdaten 7/5 Raumbezogene Informatiossysteme 1/7 räumliche Informationssysteme (RIS) 7/1; 7/3; 7/23 Real time-GPS 9/84 Navigationsparameter 8/2 Receivereinheit 9/73f rechtliche Grundsätze im Hochbau (Absteckung) 8/56ff Rechtssystem 1/15 Rec-Modul 9/67 Reduktion auf Höhe Null 4/25ff 4/25; 4/28 4/25; 4/28 auf Projektionsfläche 4/19 1/18; 4/28 1/18 aus Punkthöhen 4/26f der Kugeldistanz ins Projektionssystem 4/29f 4/30 4/29 geometrische 4/25f 4/35 mit Zenitwinkeln 4/27ff 4/27 Redundanz 6/28 6/28 reduziertes Mittel (Satzmessung) 4/15 Referenzellipsoid 1/12 9/84 Reflektor (Prismenreflektor) 4/36; 9/6f 9/6 Reflexfolie 9/7 9/6 Reflexion, -sgesetz 9/3 9/3 9/3 Reflexionsprisma 9/5 9/5 Refraktion 5/21f 5/21 4/32; 5/21f 4/31; 8/9 Analyse des Einflusses 4/34 4/34 4/34 Refraktionskoeffizient 5/21 5/22 4/32; 5/21f 4/31 Refraktionswinkel 5/21 5/22 5/22 Regelkreis (polare Absteckung) 8/15 Reichenbach: Distanzmessung 9/51 9/51f 9/51f Reichenbach'sche Distanzstriche 9/51f 5/14 Relational Interface System (RIS) 7/23 relative Orientierung (Photogrammetrie) 10/10 10/10; 10/16 10/16 Punktbestimmung (GPS) 9/77 Réseau (Messgitterplatte), -messung (Photogramm.) 10/15 10/14f Residuen 6/30; 6/65 6/30; 6/65 Rho r°, rgon 1/22 1/22 1/22
Sachwortregister Seite 25
Sachwort Definition Abbildung Formel weitere Erwähnung
Richtlaser 8/7f 8/6ff Anwendung bei Baumaschinen 8/40 8/40 Richtung 4/14 orientierte 4/19ff 4/19 4/21 orientierte: Standardabweichung 6/40 Richtungsmessung 4/14; 9/35 exzentrische 4/38f 4/38f Genauigkeitsangaben (Beispiel) 6/38 6/38 Signatur 4/8 RINEX-Format 9/68 Ringpolygon 4/10 4/10 Röhrenlibelle 9/15f 2/17; 9/15f Rotation, gleichsinnige und ungleichsinnige 3/6f 3/6f 3/6f Rotationsellipsoid 1/12 1/10 1/10 Rotationslaser 5/15; 9/31 Anwendung bei Baumaschinen 8/22; 8/40 8/22; 8/40 beim Schnurgerüst 8/58 8/58 horizontale Ebene abstecken 8/11 8/11 Justierung 9/34 9/34 Rover 8/18 8/18; 9/84 Rückblickablesung 5/9 5/8f Rückversicherung 8/3 8/31 8/31; 8/38 Rückwärtseinschneiden 4/55ff 4/13 4/13 nach Cassini 4/57 4/57 nach Collins 4/56 4/56f
S Sammellinse 9/8 9/8f Satellite Laser Ranging (SLR) 5/34 5/34 Satelliten 9/72 9/72f Satellitenaltimetrie 5/34 5/34 Satellitenbahndaten 9/73 9/75 Satellitendatum 9/84 Satellitenkonstellation 9/72 Satellitenphotogrammetrie 10/3 Satellitensystem NAVSTAR-GPS 9/72ff 9/72ff Satz, -messung 4/15 scalebar (Basislatte) 9/52 9/52 Scanner (Photogrammetrie) 10/6 Scanverfahren, primäre und sekundäre 7/5f Schätzwerte, -funktion der Ausgleichung 6/30 6/30 Schichtlinie, -höhe 7/37 7/37 Schieblehre 9/50 9/48 schiefachsige Mercatorprojektion 1/17 1/17f schiefachsige, winkeltreue Zylinderprojektion 1/17f 1/17 Schiefe (Verteilungsfunktion) 6/7 6/7 6/7 schiefe Verteilung 6/7 6/7 Schlauchwaage 5/29 5/29f horizontale Ebene abstecken 8/12 Schlusskontrolle bei Ausgleichungsrechnung 6/35 Beispiel 6/66 Schmiegungskugel 1/13 1/10
Seite 26 Sachwortregister
Sachwort Definition Abbildung Formel weitere Erwähnung
Schnurgerüst 8/58ff 8/58ff Absteckungsakten 8/60 Anforderungen 8/59 Messverfahren 8/60 Übergabeprotokoll 8/60 Vorgehen 8/58ff Zuständigkeiten 8/58 Schnurlot 2/5; 8/10 2/5; 2/16; 8/10 Schraffe 7/38 7/38 Schrägdistanzmessung 4/36 Schraubenmikrometer 9/50 9/50 Schwebungsfrequenz 9/57 schweizerisches Koordinatensystem 1/17f 1/17 Schwellwertbildung (Triggerung) 9/43; 9/60 Schwere, -beschleunigung 5/2 Schwerefeld 5/2 5/2 Schwimmlot 9/24 9/24 search light 9/68 Sehsinn 9/13 Seitwärtseinschneiden 4/11 4/11 4/11 sekundäre Scanverfahren 7/5f Selective Availability (SA) 9/75 Sender 9/53 9/53 Senkel 2/5 2/2; 2/5 Sensoren, nicht-photographische 10/6 Servomethode (Neigungssensor) 9/19 Setzlatte 7/11 Setzlibelle 9/22 SI-Basiseinheiten 1/21 Sicherheit von Messequipen 2/21 Signal (EDM) 9/53ff Signalstruktur beim GPS 9/74 9/74ff Signaltheorie der EDM 9/53ff Signalumformung (Neigungsmesser) 9/20 9/20 Signaturen (Planinhalte) 7/38 Simultankalibrierung (Photogrammetrie) 10/16 single differences (GPS) 9/78 Sinussatz (Varianzberechnung) 6/43 6/43 Situation (Planinhalte) 7/36 7/36ff SLR (Satellite Laser Ranging) 5/34 5/34 Snellius: Brechungsgesetz 9/4 9/4 9/3f Space Vehicles SV's 9/72 Spektralbereich 9/3 9/3 Spektrum der Geomatik 1/3 elektromagnetischer Strahlung 9/55 9/55 sphärische Aberration 9/9f 9/10 Spiegellinsen 9/8f 9/8f Spiegellinsenfernrohre 9/13 Spielpunkt 9/22 2/16 2/2; 2/17 Spirale (Klothoide) 8/27ff 8/27ff 8/27 Sprungstandverfahren (einfach, erweitert) 5/25 5/25 SQL 7/23
Sachwortregister Seite 27
Sachwort Definition Abbildung Formel weitere Erwähnung
Staffellatte 7/11 7/11 Staffelmessung (Messband) 2/8 2/8 Staffelmethode 7/11 7/11f Stand- und Zielpunktzentrierung 4/39 4/39 4/39 Standardabweichung arithmetisches Mittel 6/10 arithmetisches Mittel (Doppelnivellement) 5/14 5/14 Doppelbeobachtung ohne Gewichtung 6/9 Doppelmessungen (Beispiel) 6/37 6/37 einer aus s Sätzen gemittelten Richtung 6/38 einer Beobachtung mit Gewichtung 6/12 einer einzelnen Beobachtung 6/10 einer gesamten Höhendifferenz 5/14 5/14 einer in einem Satz beobachteten Richtung 6/38 einer/mehrerer Doppelbeob. mit Gewichtung 6/12 eines Polygonpunktes in Längs-/ Querrichtung 6/50 eines unbek. Parameters (bei Ausgleichung) 6/36 6/36 empirische 6/10 6/10 gewichtetes Mittel 6/12 Gewichtseinheit 6/12 Gewichtseinheit (Doppelnivellement) 5/14 5/14 Kugeldistanz (Distanzreduktion) 4/26 4/26 standardisierte Normalverteilung 6/6 6/6 Standpunktzentrierung 4/38 4/38 4/38 static (GPS) 9/83 Statistik, geodätische Kap. 6 Stativ Aufstellung 2/13f Bauformen 2/13 Stativstern 2/14 Stehachse 9/36 9/36 Stehachsschiefe 9/39f 9/39f 9/40 Stereoauswertegerät (Photogrammetrie) 10/9 10/9 Stereobildauswertung (Photogrammetrie) 10/9 Stereokammer (Photogrammetrie) 10/6 10/6 Stereomodellorientierung (Photogrammetrie) 10/9 10/9 Sternwarte Bern 1/18 stochastisches Modell 6/21 stop and go (GPS) 9/83 Strahlensatz (Höhenlinieninterpolation) 7/33 7/33 7/33 Strassenprojektierung: DGM 7/43 7/43 Streuung (elektromagnetische Strahlung) 9/55 Strichendmass 9/49 Strichkreuzplatte 9/11 9/11 Strichmassstab 9/49 Strukturlinie 7/40 Student-Verteilung 6/15 Stützpunkte (DGM) 7/40 systematische Abweichungen (systematic errors) 6/2f
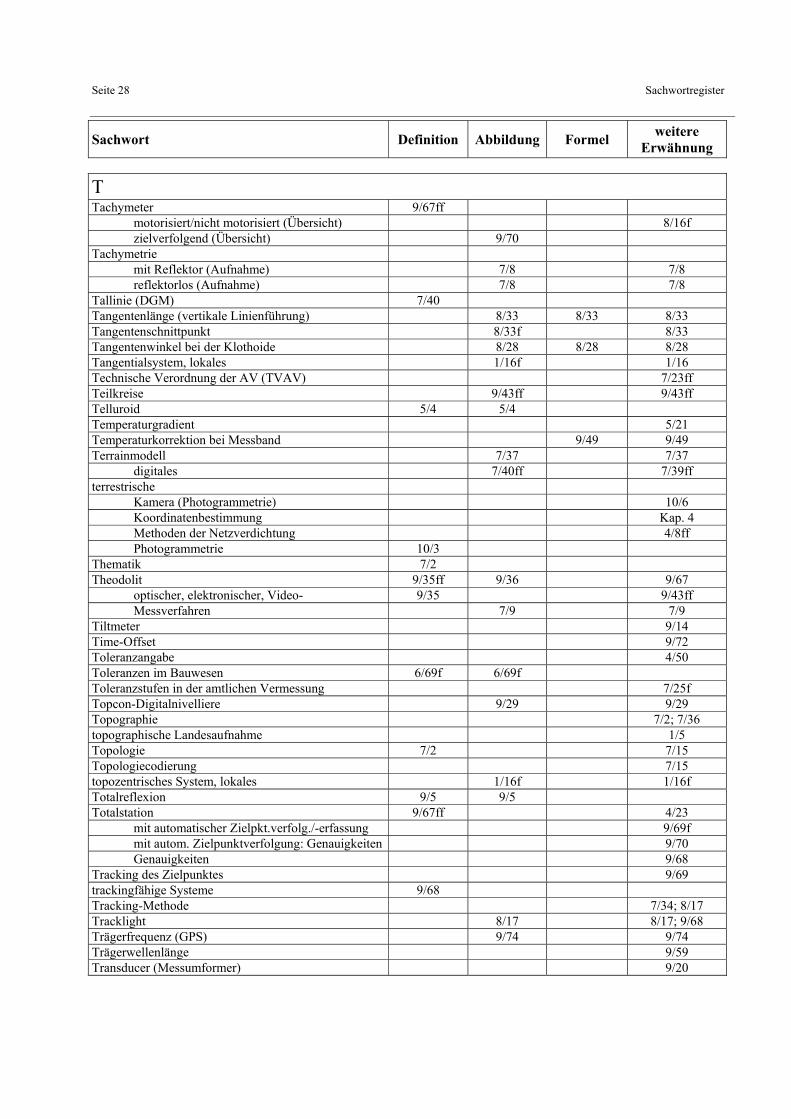
Seite 28 Sachwortregister
Sachwort Definition Abbildung Formel weitere Erwähnung
T Tachymeter 9/67ff motorisiert/nicht motorisiert (Übersicht) 8/16f zielverfolgend (Übersicht) 9/70 Tachymetrie mit Reflektor (Aufnahme) 7/8 7/8 reflektorlos (Aufnahme) 7/8 7/8 Tallinie (DGM) 7/40 Tangentenlänge (vertikale Linienführung) 8/33 8/33 8/33 Tangentenschnittpunkt 8/33f 8/33 Tangentenwinkel bei der Klothoide 8/28 8/28 8/28 Tangentialsystem, lokales 1/16f 1/16 Technische Verordnung der AV (TVAV) 7/23ff Teilkreise 9/43ff 9/43ff Telluroid 5/4 5/4 Temperaturgradient 5/21 Temperaturkorrektion bei Messband 9/49 9/49 Terrainmodell 7/37 7/37 digitales 7/40ff 7/39ff terrestrische Kamera (Photogrammetrie) 10/6 Koordinatenbestimmung Kap. 4 Methoden der Netzverdichtung 4/8ff Photogrammetrie 10/3 Thematik 7/2 Theodolit 9/35ff 9/36 9/67 optischer, elektronischer, Video- 9/35 9/43ff Messverfahren 7/9 7/9 Tiltmeter 9/14 Time-Offset 9/72 Toleranzangabe 4/50 Toleranzen im Bauwesen 6/69f 6/69f Toleranzstufen in der amtlichen Vermessung 7/25f Topcon-Digitalnivelliere 9/29 9/29 Topographie 7/2; 7/36 topographische Landesaufnahme 1/5 Topologie 7/2 7/15 Topologiecodierung 7/15 topozentrisches System, lokales 1/16f 1/16f Totalreflexion 9/5 9/5 Totalstation 9/67ff 4/23 mit automatischer Zielpkt.verfolg./-erfassung 9/69f mit autom. Zielpunktverfolgung: Genauigkeiten 9/70 Genauigkeiten 9/68 Tracking des Zielpunktes 9/69 trackingfähige Systeme 9/68 Tracking-Methode 7/34; 8/17 Tracklight 8/17 8/17; 9/68 Trägerfrequenz (GPS) 9/74 9/74 Trägerwellenlänge 9/59 Transducer (Messumformer) 9/20
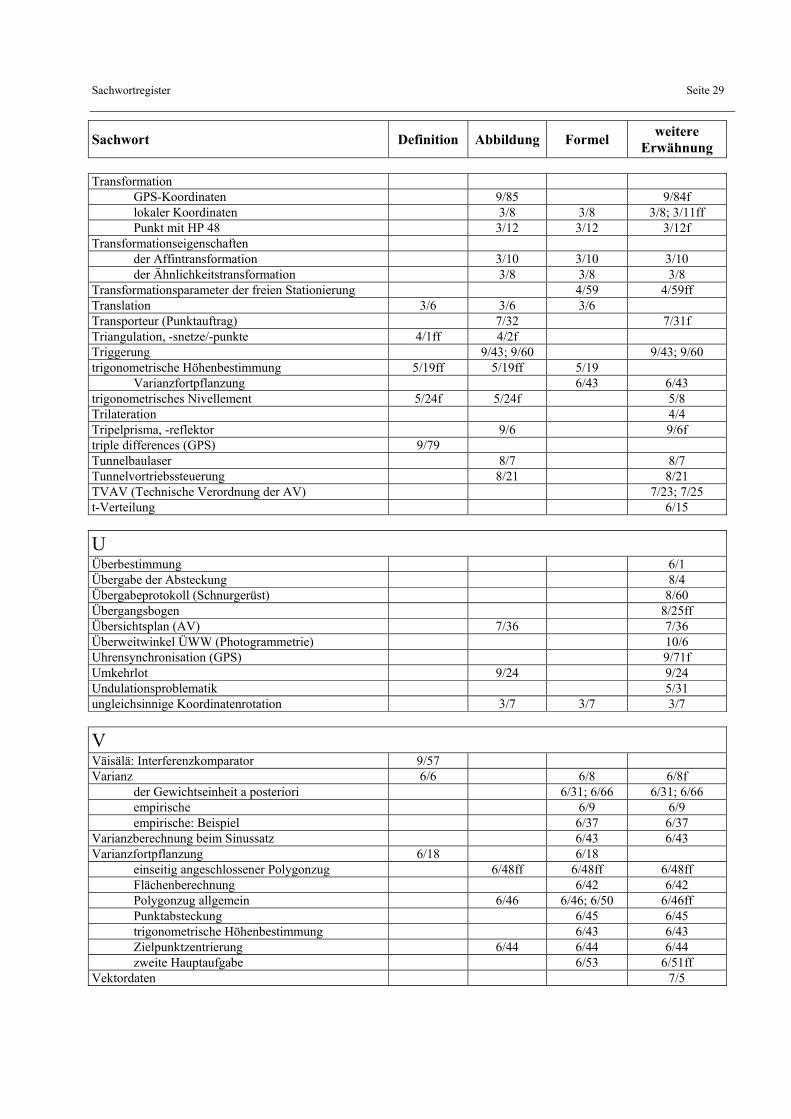
Sachwortregister Seite 29
Sachwort Definition Abbildung Formel weitere Erwähnung
Transformation GPS-Koordinaten 9/85 9/84f lokaler Koordinaten 3/8 3/8 3/8; 3/11ff Punkt mit HP 48 3/12 3/12 3/12f Transformationseigenschaften der Affintransformation 3/10 3/10 3/10 der Ähnlichkeitstransformation 3/8 3/8 3/8 Transformationsparameter der freien Stationierung 4/59 4/59ff Translation 3/6 3/6 3/6 Transporteur (Punktauftrag) 7/32 7/31f Triangulation, -snetze/-punkte 4/1ff 4/2f Triggerung 9/43; 9/60 9/43; 9/60 trigonometrische Höhenbestimmung 5/19ff 5/19ff 5/19 Varianzfortpflanzung 6/43 6/43 trigonometrisches Nivellement 5/24f 5/24f 5/8 Trilateration 4/4 Tripelprisma, -reflektor 9/6 9/6f triple differences (GPS) 9/79 Tunnelbaulaser 8/7 8/7 Tunnelvortriebssteuerung 8/21 8/21 TVAV (Technische Verordnung der AV) 7/23; 7/25 t-Verteilung 6/15
U Überbestimmung 6/1 Übergabe der Absteckung 8/4 Übergabeprotokoll (Schnurgerüst) 8/60 Übergangsbogen 8/25ff Übersichtsplan (AV) 7/36 7/36 Überweitwinkel ÜWW (Photogrammetrie) 10/6 Uhrensynchronisation (GPS) 9/71f Umkehrlot 9/24 9/24 Undulationsproblematik 5/31 ungleichsinnige Koordinatenrotation 3/7 3/7 3/7
V Väisälä: Interferenzkomparator 9/57 Varianz 6/6 6/8 6/8f der Gewichtseinheit a posteriori 6/31; 6/66 6/31; 6/66 empirische 6/9 6/9 empirische: Beispiel 6/37 6/37 Varianzberechnung beim Sinussatz 6/43 6/43 Varianzfortpflanzung 6/18 6/18 einseitig angeschlossener Polygonzug 6/48ff 6/48ff 6/48ff Flächenberechnung 6/42 6/42 Polygonzug allgemein 6/46 6/46; 6/50 6/46ff Punktabsteckung 6/45 6/45 trigonometrische Höhenbestimmung 6/43 6/43 Zielpunktzentrierung 6/44 6/44 6/44 zweite Hauptaufgabe 6/53 6/51ff Vektordaten 7/5
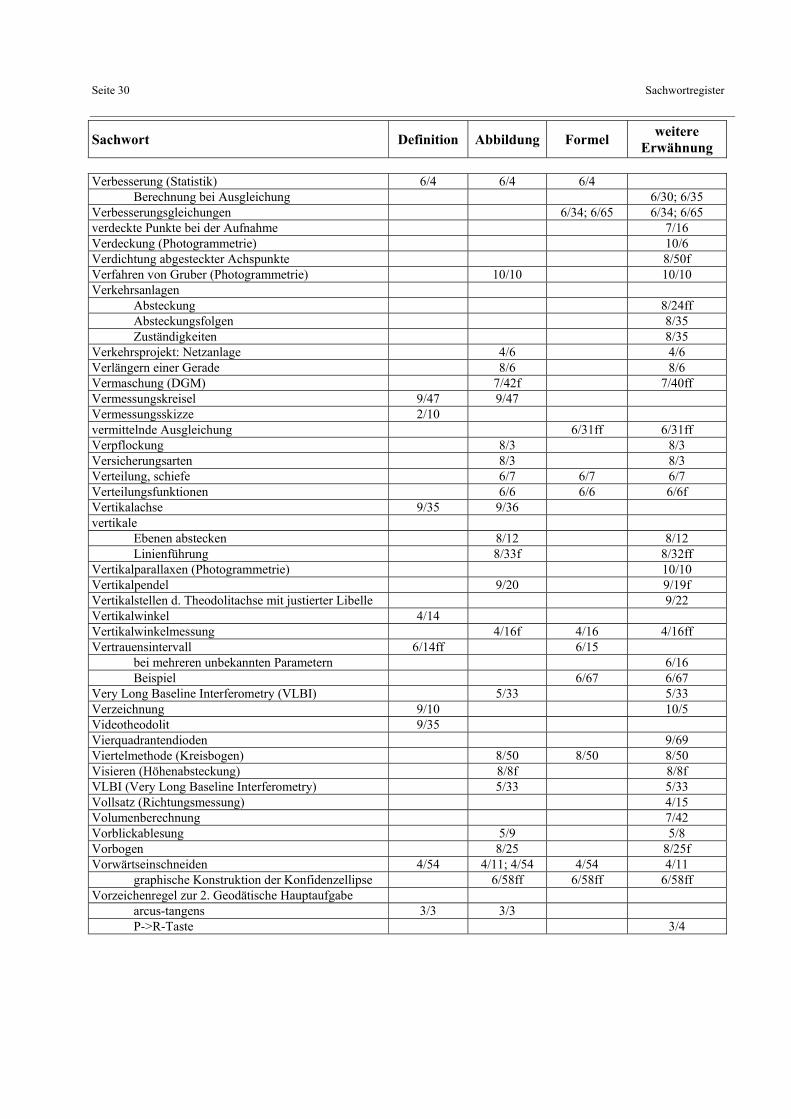
Seite 30 Sachwortregister
Sachwort Definition Abbildung Formel weitere Erwähnung
Verbesserung (Statistik) 6/4 6/4 6/4 Berechnung bei Ausgleichung 6/30; 6/35 Verbesserungsgleichungen 6/34; 6/65 6/34; 6/65 verdeckte Punkte bei der Aufnahme 7/16 Verdeckung (Photogrammetrie) 10/6 Verdichtung abgesteckter Achspunkte 8/50f Verfahren von Gruber (Photogrammetrie) 10/10 10/10 Verkehrsanlagen Absteckung 8/24ff Absteckungsfolgen 8/35 Zuständigkeiten 8/35 Verkehrsprojekt: Netzanlage 4/6 4/6 Verlängern einer Gerade 8/6 8/6 Vermaschung (DGM) 7/42f 7/40ff Vermessungskreisel 9/47 9/47 Vermessungsskizze 2/10 vermittelnde Ausgleichung 6/31ff 6/31ff Verpflockung 8/3 8/3 Versicherungsarten 8/3 8/3 Verteilung, schiefe 6/7 6/7 6/7 Verteilungsfunktionen 6/6 6/6 6/6f Vertikalachse 9/35 9/36 vertikale Ebenen abstecken 8/12 8/12 Linienführung 8/33f 8/32ff Vertikalparallaxen (Photogrammetrie) 10/10 Vertikalpendel 9/20 9/19f Vertikalstellen d. Theodolitachse mit justierter Libelle 9/22 Vertikalwinkel 4/14 Vertikalwinkelmessung 4/16f 4/16 4/16ff Vertrauensintervall 6/14ff 6/15 bei mehreren unbekannten Parametern 6/16 Beispiel 6/67 6/67 Very Long Baseline Interferometry (VLBI) 5/33 5/33 Verzeichnung 9/10 10/5 Videotheodolit 9/35 Vierquadrantendioden 9/69 Viertelmethode (Kreisbogen) 8/50 8/50 8/50 Visieren (Höhenabsteckung) 8/8f 8/8f VLBI (Very Long Baseline Interferometry) 5/33 5/33 Vollsatz (Richtungsmessung) 4/15 Volumenberechnung 7/42 Vorblickablesung 5/9 5/8 Vorbogen 8/25 8/25f Vorwärtseinschneiden 4/54 4/11; 4/54 4/54 4/11 graphische Konstruktion der Konfidenzellipse 6/58ff 6/58ff 6/58ff Vorzeichenregel zur 2. Geodätische Hauptaufgabe arcus-tangens 3/3 3/3 P->R-Taste 3/4
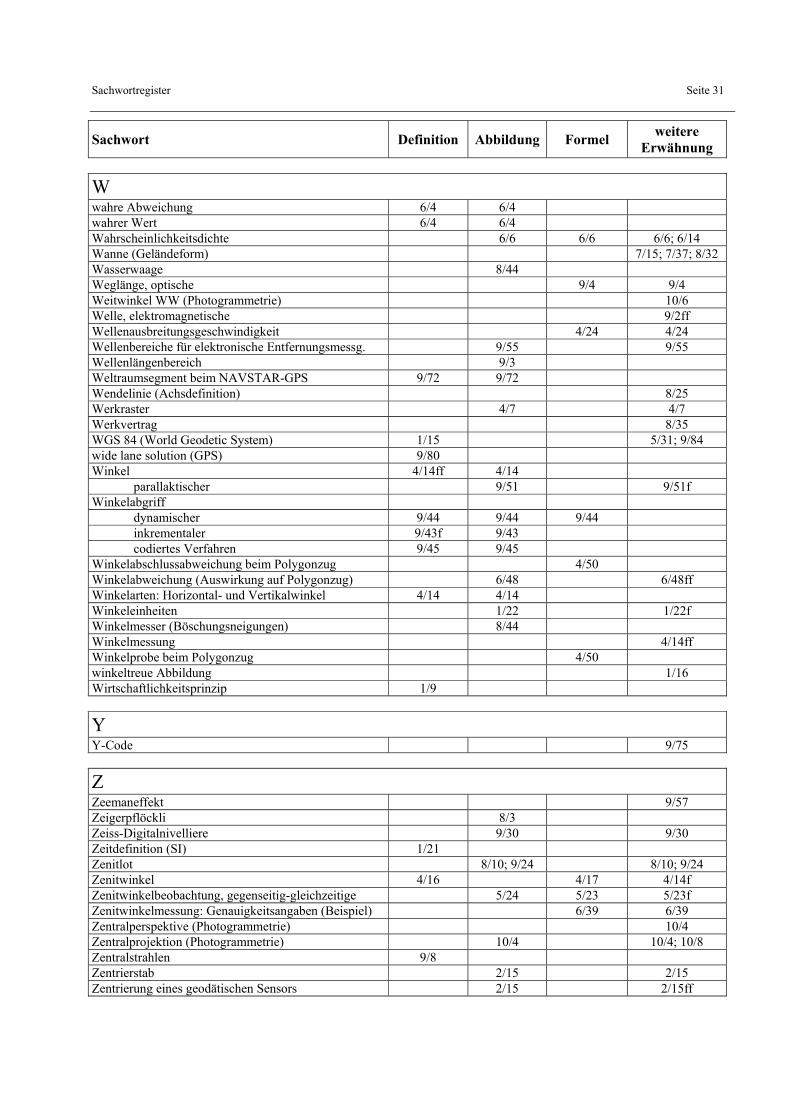
Sachwortregister Seite 31
Sachwort Definition Abbildung Formel weitere Erwähnung
W wahre Abweichung 6/4 6/4 wahrer Wert 6/4 6/4 Wahrscheinlichkeitsdichte 6/6 6/6 6/6; 6/14 Wanne (Geländeform) 7/15; 7/37; 8/32 Wasserwaage 8/44 Weglänge, optische 9/4 9/4 Weitwinkel WW (Photogrammetrie) 10/6 Welle, elektromagnetische 9/2ff Wellenausbreitungsgeschwindigkeit 4/24 4/24 Wellenbereiche für elektronische Entfernungsmessg. 9/55 9/55 Wellenlängenbereich 9/3 Weltraumsegment beim NAVSTAR-GPS 9/72 9/72 Wendelinie (Achsdefinition) 8/25 Werkraster 4/7 4/7 Werkvertrag 8/35 WGS 84 (World Geodetic System) 1/15 5/31; 9/84 wide lane solution (GPS) 9/80 Winkel 4/14ff 4/14 parallaktischer 9/51 9/51f Winkelabgriff dynamischer 9/44 9/44 9/44 inkrementaler 9/43f 9/43 codiertes Verfahren 9/45 9/45 Winkelabschlussabweichung beim Polygonzug 4/50 Winkelabweichung (Auswirkung auf Polygonzug) 6/48 6/48ff Winkelarten: Horizontal- und Vertikalwinkel 4/14 4/14 Winkeleinheiten 1/22 1/22f Winkelmesser (Böschungsneigungen) 8/44 Winkelmessung 4/14ff Winkelprobe beim Polygonzug 4/50 winkeltreue Abbildung 1/16 Wirtschaftlichkeitsprinzip 1/9
Y Y-Code 9/75
Z Zeemaneffekt 9/57 Zeigerpflöckli 8/3 Zeiss-Digitalnivelliere 9/30 9/30 Zeitdefinition (SI) 1/21 Zenitlot 8/10; 9/24 8/10; 9/24 Zenitwinkel 4/16 4/17 4/14f Zenitwinkelbeobachtung, gegenseitig-gleichzeitige 5/24 5/23 5/23f Zenitwinkelmessung: Genauigkeitsangaben (Beispiel) 6/39 6/39 Zentralperspektive (Photogrammetrie) 10/4 Zentralprojektion (Photogrammetrie) 10/4 10/4; 10/8 Zentralstrahlen 9/8 Zentrierstab 2/15 2/15 Zentrierung eines geodätischen Sensors 2/15 2/15ff
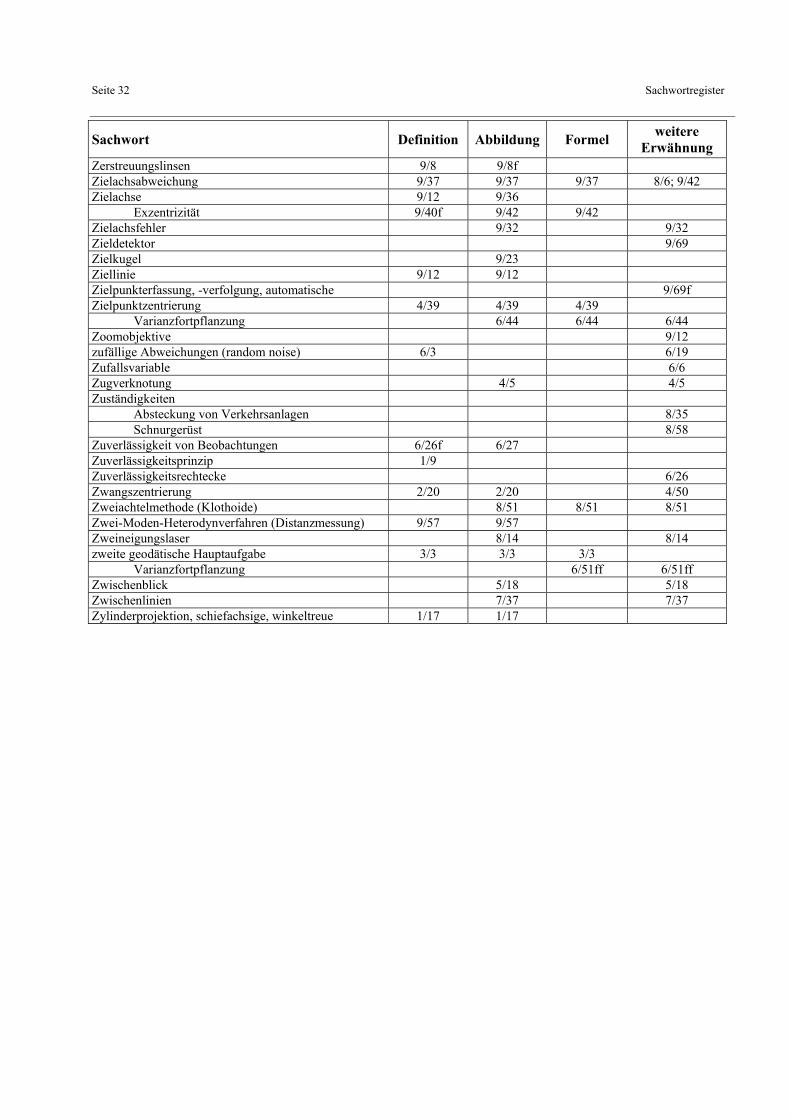
Seite 32 Sachwortregister
Sachwort Definition Abbildung Formel weitere Erwähnung
Zerstreuungslinsen 9/8 9/8f Zielachsabweichung 9/37 9/37 9/37 8/6; 9/42 Zielachse 9/12 9/36 Exzentrizität 9/40f 9/42 9/42 Zielachsfehler 9/32 9/32 Zieldetektor 9/69 Zielkugel 9/23 Ziellinie 9/12 9/12 Zielpunkterfassung, -verfolgung, automatische 9/69f Zielpunktzentrierung 4/39 4/39 4/39 Varianzfortpflanzung 6/44 6/44 6/44 Zoomobjektive 9/12 zufällige Abweichungen (random noise) 6/3 6/19 Zufallsvariable 6/6 Zugverknotung 4/5 4/5 Zuständigkeiten Absteckung von Verkehrsanlagen 8/35 Schnurgerüst 8/58 Zuverlässigkeit von Beobachtungen 6/26f 6/27 Zuverlässigkeitsprinzip 1/9 Zuverlässigkeitsrechtecke 6/26 Zwangszentrierung 2/20 2/20 4/50 Zweiachtelmethode (Klothoide) 8/51 8/51 8/51 Zwei-Moden-Heterodynverfahren (Distanzmessung) 9/57 9/57 Zweineigungslaser 8/14 8/14 zweite geodätische Hauptaufgabe 3/3 3/3 3/3 Varianzfortpflanzung 6/51ff 6/51ff Zwischenblick 5/18 5/18 Zwischenlinien 7/37 7/37 Zylinderprojektion, schiefachsige, winkeltreue 1/17 1/17


















