
Ein innovativer Ansatz zur Lichtsignalsteuerung – darggp ... · Ein innovativer Ansatz zur...
26
Konzeption für ein Lkw-Parkleitsystem für Sachsen Lehrstuhl für Verkehrsleitsysteme und -prozessautomatisierung Prof. Dr.-Ing. J. Krimmling Dipl.-Ing. C. Gassel Ein innovativer Ansatz zur Lichtsignalsteuerung – dargestellt am Beispiel der Knotenpunkte Nürnberger Platz und Fritz-Löffler-Straße / Reichenbachstraße in Dresden 6. ViMOS-Tagung am 15.12.2010 Seite 1 Präsentation Prof. Dr.-Ing. J. Krimmling Tel: 0351- 463 39750 e-mail: [email protected]
Transcript of Ein innovativer Ansatz zur Lichtsignalsteuerung – darggp ... · Ein innovativer Ansatz zur...

Konzeption für ein Lkw-Parkleitsystem für Sachsen
Lehrstuhl für Verkehrsleitsystemeund -prozessautomatisierung
Prof. Dr.-Ing. J. KrimmlingDipl.-Ing. C. Gassel
Ein innovativer Ansatz zur Lichtsignalsteuerung –dargestellt am Beispiel der Knotenpunkte g p pNürnberger Platz und Fritz-Löffler-Straße /
Reichenbachstraße in Dresden
6. ViMOS-Tagungg gam 15.12.2010
Seite 1PräsentationProf. Dr.-Ing. J. Krimmling
Tel: 0351- 463 39750e-mail: [email protected]

Ein innovativer Ansatz zur LSA-Steuerung
Gliederung
1 Ausgangslage1. Ausgangslage
2. Zielstellung
3. Systemarchitektur und steuerungstechnische Umsetzung
4. Fahrerassistenzsystem und energiesparende Fahrweisen
5. Pilotprojekt Nürnberger Platz und Reichenbachstraße
6. Zusammenfassung und Ausblick
Seite 2Prof. Dr.-Ing. J. Krimmling6. ViMOS-Tagung
Ein innovativer Ansatz zur LSA-Steuerung
1. Ausgangslage ÖPNV, RBL-Zentrale
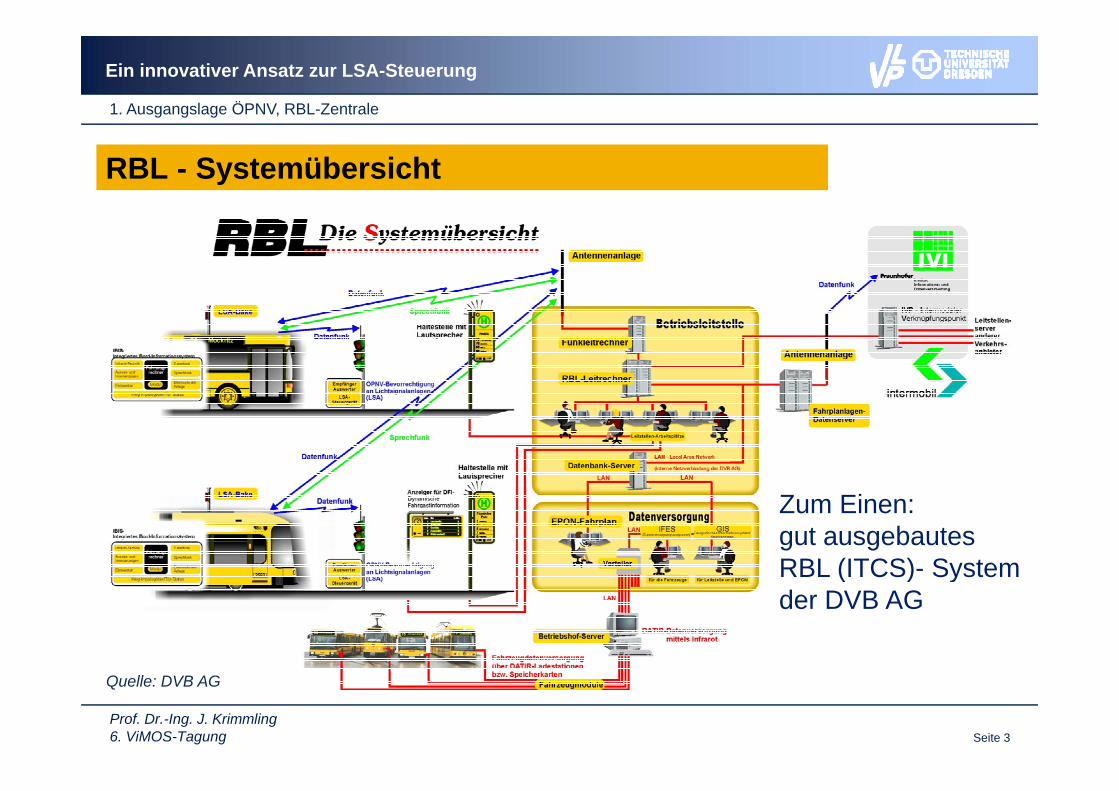
RBL - Systemübersicht
Zum Einen: gut ausgebautes RBL (ITCS)- SystemRBL (ITCS) System der DVB AG
Seite 3Prof. Dr.-Ing. J. Krimmling6. ViMOS-Tagung
Quelle: DVB AG

Ein innovativer Ansatz zur LSA-Steuerung
1. Ausgangslage: MIV, Verkehrsmanagement und Lichtsignalsteuerung
Verkehrs- und Betriebszustandsdaten
Verkehrsmanagement-Zentrale
Dynamische Wechsel-wegweisung
Parkleit- und -informationssystem
Betriebszustandsdaten der A17 und A4
Zentrale
VAMOSVerkehrs-
informationssystem
g gStadt und BAB
LSA-Verkehrsrechner
y
Verkehrslage in der LH Dresden
y
Verkehrs-1
Verkehrs-2
Verkehrs-3
Verkehrs- Verkehrs- Verkehrs-6
Verkehrs-h 7
Verkehrs-h 8rechner 1
SteuerkomplexSt dt t I
rechner 2
SteuerkomplexSüd
rechner 3
SteuerkomplexW t
rechner 4
SteuerkomplexN d
rechner 5
SteuerkomplexO t
rechner 6
SteuerkomplexK dit / Mi kt
rechner 7
SteuerkomplexKl t h
rechner 8
SteuerkomplexSt dt t IIStadtzentrum I
Wiener Pl.Süd
STA/ L.-Str.West
Coventrystr.Nord
Neustädt. MarktOst
STA/ L.-Str.Kaditz/ MicktenAS DD-Neust.
KlotzscheFlughafen
Stadtzentrum II, Wiener Pl.
Seite 4Prof. Dr.-Ing. J. Krimmling6. ViMOS-Tagung

Ein innovativer Ansatz zur LSA-Steuerung
1. Ausgangslage: Physische Vernetzung der einzelnen Steuerungs- und Managementsysteme im Großraum Dresden
per Kabel (LWL) vernetzt:- Systeme der LH Dresden, u.a.
- ca. 410 von ca. 460 LSAi V k h l it d htAutobahnleitzentrale
Verkehrsmanagement Dresden – Infrastruktur
- ein Verkehrsleit- und acht Verkehrsrechner
- Parkleitsystem- Verkehrsrechnerzentrale des
Autobahnleitzentrale
Verkehrsrechnerzentrale des Autobahnamtes mit
- Verkehrsbeeinflussungsanlage- Tunnelsteuerungen
W h l i A4 / A17
DVB AG
Lagezentrum SMI- Wechselwegweisung A4 / A17
- Taxi-Leitzentrale- DVB AG- Polizei (Lagezentrum SMI)
TUD Taxi-Leitzentrale
g
( g )
Daten-lieferanten
Straßen- und Tiefbauamt
LWL-Kabel
Seite 5Prof. Dr.-Ing. J. Krimmling6. ViMOS-Tagung

Ein innovativer Ansatz zur LSA-Steuerung
2. Zielstellung
RBL - Systemübersicht
Parkleit- und -informationssystem
Verkehrs-informationssystem
dynamische Wechsel-wegweisung Stadt und
BAB
Verkehrs- und Betriebszustandsdaten
der A17 und A4
Verkehrsmanagement-Zentrale
VAMOS
Verkehrs-rechner 1
Verkehrs-rechner 2
Verkehrs-rechner 3
Verkehrs-rechner 4
Verkehrs-rechner 5
Verkehrs-rechner 6
LSA-VerkehrsrechnerVerkehrslage in der LH Dresden
Verkehrs-rechner 7
Verkehrs-rechner 8
SteuerkomplexStadtzentrum I
Wiener Pl.
SteuerkomplexSüd
STA/ L.-Str.
SteuerkomplexWest
Coventrystr.
SteuerkomplexNord
Neustädt. Markt
SteuerkomplexOst
STA/ L.-Str.
SteuerkomplexKaditz/ MicktenAS DD-Neust.
SteuerkomplexKlotzscheFlughafen
SteuerkomplexStadtzentrum II,
Wiener Pl.
Zielstellung: Durch eine intelligente Verbindung beider SystemeRealisierung einer innovativen LSA-Steuerung als Gesamtoptimum fürden Individualverkehr und den Öffentlichen- Personen- Nahverkehr
Seite 6Prof. Dr.-Ing. J. Krimmling6. ViMOS-Tagung
den Individualverkehr und den Öffentlichen Personen Nahverkehr

Ein innovativer Ansatz zur LSA-Steuerung
2. Zielstellung
Zielstellungen aus Sicht des ÖPNV:
- fahrplanabhängige Bevorrechtigung in mehreren Stufen- fahrplanabhängige Bevorrechtigung in mehreren Stufen- LSA- seitige Unterstützung von dynamischen Anschlüssen- Realisierung energiesparender Fahrweisen und Vermeidung unnötiger
Halte an der LSAHalte an der LSA
Zielstellungen aus Sicht des IV:Zielstellungen aus Sicht des IV:
- Sicherung der Leistungsfähigkeit- Vermeidung unnötiger Unterbrechungen der Grünen Welle durch den- Vermeidung unnötiger Unterbrechungen der Grünen Welle durch den
ÖPNV
Seite 7Prof. Dr.-Ing. J. Krimmling6. ViMOS-Tagung

Ein innovativer Ansatz zur LSA-Steuerung
3. Systemarchitektur und steuerungstechnische Umsetzung
Multimodale Systemarchitektur (Stufe 1)
RBL
Bus/StrabPositionsdaten
ÖV-ÖV-
Multimodale Schnittstelle
Priorisierungs-system
ÖV-Annäherungsmodul Ankunftsprog-
nose ÖPNV
Verkehrsmana-gementzentrale
MIV-Verkehrs-lageerfassung
Aktuelle MIV-Verkehrslage
Seite 8Prof. Dr.-Ing. J. Krimmling6. ViMOS-Tagung

Ein innovativer Ansatz zur LSA-Steuerung
3. Systemarchitektur und steuerungstechnische Umsetzung
ÖV-Priorisierungssystem
- Realisierung von sieben Prioritätsstufen für jedes ÖV-Fahrzeug, g j g,abhängig von
• Fahrplanlage• Fahrzeugfolge• dynamischen Anschlüssen• MIV-Verkehrslageg
- Steuerungstechnische Umsetzung in VS-PLUS mit Modifikationstechnik
→ Modifikationsauslösung durch RBL-LSA-Telegramme, dieentsprechend gebildet/ angepasst werden
→ Standard RBL-LSA-Telegramme werden ignoriert→ Standard RBL-LSA-Telegramme werden ignoriert
Seite 9Prof. Dr.-Ing. J. Krimmling6. ViMOS-Tagung

Ein innovativer Ansatz zur LSA-Steuerung
3. Systemarchitektur und steuerungstechnische Umsetzung
Weg
Steuerungstechnische Umsetzung in VS-PLUS (Modifikationen)
Haltelinie S1
modellbasierte Annäherungslinie12
Zeit
K1 HRVariante 1
K1 HR
K2 NR
Variante 2
Variante 2Variante 1
S1 NR Variante 1Variante 2
Seite 10Prof. Dr.-Ing. J. Krimmling6. ViMOS-Tagung
Ersatz von Signalplanabschnitten

Ein innovativer Ansatz zur LSA-Steuerung
3. Systemarchitektur und steuerungstechnische Umsetzung
Multimodale Systemarchitektur (Stufe 1)
RBLRBL
Verbleibende Zeit bis zur nächsten Grünphase dynamische Anschlüsse
Bus/StrabPositionsdaten
ÖV- LSAÖV Verkehrs
Multimodale Schnittstelle
Priorisierungs-system
LSA-Steuergerät
ÖV-Annäherungsmodul Ankunfsprog-
nose ÖPNV
Verkehrs-rechner
Aktuelle MIV-Verkehrslage Verkehrsmana-
gementzentraleMIV-Verkehrs-lageerfassung
Seite 11Prof. Dr.-Ing. J. Krimmling6. ViMOS-Tagung
Ein innovativer Ansatz zur LSA-Steuerung
4. Fahrerassistenzsystem und energiesparende Fahrweisen
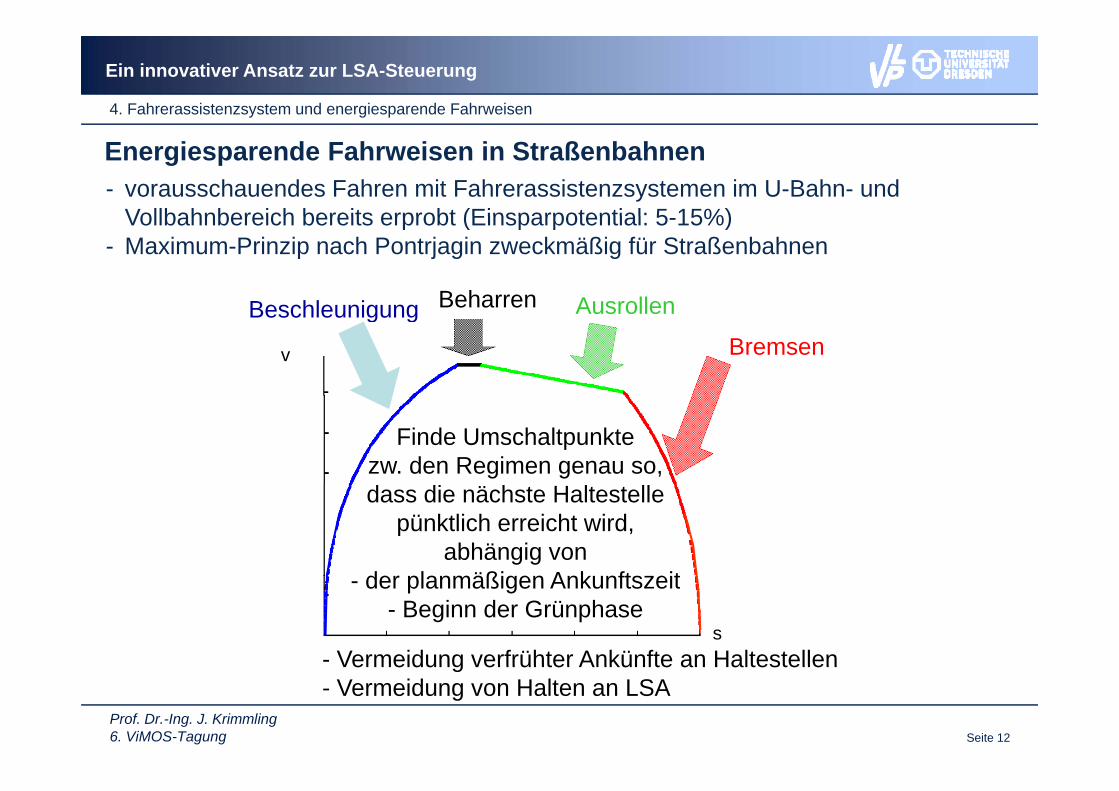
Energiesparende Fahrweisen in Straßenbahnen- vorausschauendes Fahren mit Fahrerassistenzsystemen im U-Bahn- und
Vollbahnbereich bereits erprobt (Einsparpotential: 5 15%)
Beschleunigung Beharren Ausrollen
Vollbahnbereich bereits erprobt (Einsparpotential: 5-15%)- Maximum-Prinzip nach Pontrjagin zweckmäßig für Straßenbahnen
BeschleunigungBremsen
Beharren Ausrollen
v
Finde Umschaltpunkte zw. den Regimen genau so, d di ä h H l lldass die nächste Haltestelle
pünktlich erreicht wird, abhängig von
d l äßi A k ft it
s
- der planmäßigen Ankunftszeit- Beginn der Grünphase
- Vermeidung verfrühter Ankünfte an Haltestellen
Seite 12Prof. Dr.-Ing. J. Krimmling6. ViMOS-Tagung
Vermeidung verfrühter Ankünfte an Haltestellen- Vermeidung von Halten an LSA
Ein innovativer Ansatz zur LSA-Steuerung
4. Fahrerassistenzsystem und energiesparende Fahrweisen
80
100/s
20
40
60
Zeit
/
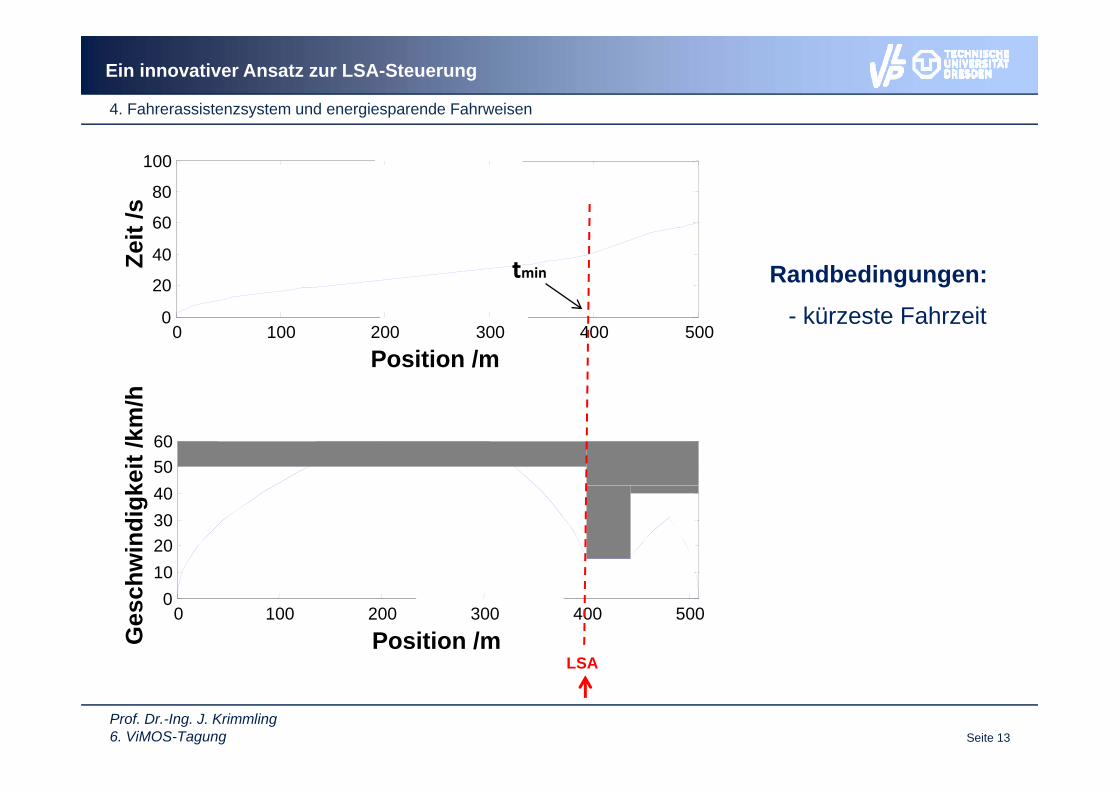
tmin Randbedingungen:
0 100 200 300 400 5000
Position /m
h
- kürzeste Fahrzeit
5060
keit
/km
/h
10203040
hwin
digk
0 100 200 300 400 5000
10
Position /mGes
ch
LSA
Seite 13Prof. Dr.-Ing. J. Krimmling6. ViMOS-Tagung
LSA

Ein innovativer Ansatz zur LSA-Steuerung
4. Fahrerassistenzsystem und energiesparende Fahrweisen
80
100/s
Grün für die Straßenbahn ist
t +5s
20
40
60
Zeit
/
gegenüber der zeitoptimalen Fahrt erst 5 s später möglich
tmin+5s
0 100 200 300 400 5000
Position /m
h
5060
keit
/km
/h
energieoptimale Fahrt
10203040
hwin
digk
energieoptimale Fahrt mit sofortigem Auslauf nach der Beschleunigung
0 100 200 300 400 5000
10
Position /mGes
ch
LSA
g g
Seite 14Prof. Dr.-Ing. J. Krimmling6. ViMOS-Tagung
LSA
Ein innovativer Ansatz zur LSA-Steuerung
4. Fahrerassistenzsystem und energiesparende Fahrweisen
80
100/s
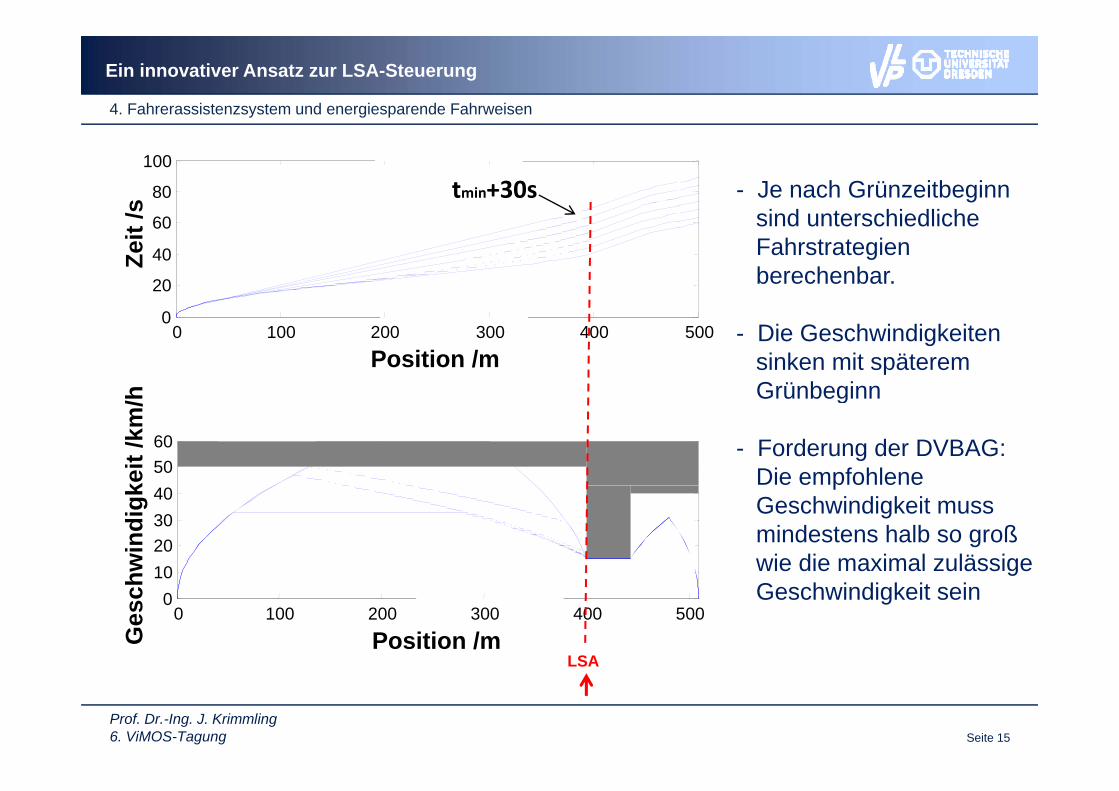
tmin+30s - Je nach Grünzeitbeginnsind unterschiedliche
20
40
60
Zeit
/ sind unterschiedlicheFahrstrategien berechenbar.
0 100 200 300 400 5000
Position /m
h
- Die Geschwindigkeitensinken mit späteremGrünbeginn
5060
keit
/km
/h Grünbeginn
- Forderung der DVBAG:Die empfohlene
10203040
hwin
digk
pGeschwindigkeit mussmindestens halb so großwie die maximal zulässige
0 100 200 300 400 5000
10
Position /mGes
ch
LSA
gGeschwindigkeit sein
Seite 15Prof. Dr.-Ing. J. Krimmling6. ViMOS-Tagung
LSA

Ein innovativer Ansatz zur LSA-Steuerung
4. Fahrerassistenzsystem und energiesparende Fahrweisen
80
100/s
tmaxRandbedingungen:
kürzeste Fahrzeit
20
40
60
Zeit
/ - kürzeste Fahrzeit
- kleinste zulässigeGeschwindigkeit
0 100 200 300 400 5000
Position /m
h
tmin
5060
keit
/km
/h
10203040
hwin
digk
zu geringe Geschwindigkeit
0 100 200 300 400 5000
10
Position /mGes
ch
zu geringe Geschwindigkeit
LSA
Seite 16Prof. Dr.-Ing. J. Krimmling6. ViMOS-Tagung
LSA

Ein innovativer Ansatz zur LSA-Steuerung
4. Fahrerassistenzsystem und energiesparende Fahrweisen
Lösungsmöglichkeit im Fall zu geringer Geschwindigkeiten:
• Realisierung einer längeren Haltestellenaufenthaltszeit in der vorher gehenden Haltestelle
• Anzeige für den Fahrer mittels Countdown
zusätzliche Wartezeit 80
100
am vorherigen Halt
• Vehicle actuated traffic control has to be restricted20
40
60
80
Zeit
/s
Zusätzliche Wartezeit an Hst.
V k h h i h R db di
• Vehicle actuated traffic control has to be restricted
0 100 200 300 400 5000
20
Weg /mVerkehrstechnische Randbedingung:Sicherung der passenden Grünzeit an allen betroffenen LSA
g
Seite 17Prof. Dr.-Ing. J. Krimmling6. ViMOS-Tagung

Ein innovativer Ansatz zur LSA-Steuerung
4. Fahrerassistenzsystem und energiesparende Fahrweisen
Aspekte des Human Engineering
LSA-Szenarien
- hohes Ablenkungsrisiko bei großer Diversität an InformationenInformationen
- Empfehlungen: Abfertigung, Ausrollen, und Beharrungsfahrt (unterhalb vmax)
- keine Beharrungsfahrt- keine Beharrungsfahrt unterhalb von 25 km/h
Seite 18Prof. Dr.-Ing. J. Krimmling6. ViMOS-Tagung

Ein innovativer Ansatz zur LSA-Steuerung
4. Fahrerassistenzsystem und energiesparende Fahrweisen
Anzeigemöglichkeiten für den Straßenbahnfahrer
1. Fahrtrajektorien3. Integration in den Tacho
2. Geschwindigkeitsinformation4. Pünktlichkeitsindikator
Seite 19Prof. Dr.-Ing. J. Krimmling6. ViMOS-Tagung

Ein innovativer Ansatz zur LSA-Steuerung
5. Pilotprojekt Nürnberger Platz und Reichenbachstraße
Kooperative Lichtsignalanlage, Nürnberger Platz
3 COZ
61 LGS8 SVS
Überblick
61 WEI
Überblick• ca. 30.000 Fahrzeuge/Tag (HR)• ca. 10.000 Fahrzeuge/Tag (NR)• Strab-Linien 3 und 8 (10 min)
B Li i 61 (5 i )
Beeinflussung der Steuerung vom Fahrzeug, mit den Zielen
61 WEI • Bus-Linie 61 (5 min)
mit den Zielen• dyn. Anschlusssicherung (8 › 61)• energiesparendes Fahren• fahrplantreues Fahren3 WIM
Seite 20Prof. Dr.-Ing. J. Krimmling6. ViMOS-Tagung
p• Stauvermeidung8 HEL
3 WIM

Ein innovativer Ansatz zur LSA-Steuerung
5. Pilotprojekt Nürnberger Platz und Reichenbachstraße
Innovativer Ansatz zur LSA- Steuerung – Nürnberger Platz• Buslinie 61 bekommt über den
Bordrechner Nachricht denBordrechner Nachricht, den Anschluss zur Strab Linie 8 zu gewähren
• ggf Verlängerung• ggf. Verlängerung Kfz-Freigabe (Linie 61)
• Höherpriorisierung Linie 8
• Geschwindigkeitsinformation
• Anschlussinformation
• Realisierung eines zusätzlichen Freigabefensters für die Linie 8
• Fahrgastwechsel
Seite 21Prof. Dr.-Ing. J. Krimmling6. ViMOS-Tagung
Realisierung nur, wenn die IV-Verkehrslage es erlaubt

Ein innovativer Ansatz zur LSA-Steuerung
5. Pilotprojekt Nürnberger Platz und Reichenbachstraße
Beispiel:
- Beginn der Grünphase: 61 s nach Abfahrt an der Haltestelle Reichenbachstraße
60
80
100/s
Wartezeit an LSA 15s
0 100 200 300 400 500 6000
20
40
60
Zeit Typischer Fahrverlauf (mit Halt
am Signal)
Position /m
40
60
hw. /
km/h Geschw.-
beschränkung(Weichen)
In Praxis häufig schnellstmögliche
0 100 200 300 400 500 6000
20
Position /m
Ges
ch
LSA
a s äu g sc e st ög c eFahrweise
0 100 200 300 400 500 6000
10
20
Höh
e /m
LSA
Maximaler Anstieg 4,1%
Seite 22Prof. Dr.-Ing. J. Krimmling6. ViMOS-Tagung
0 100 200 300 400 500 600
Position /m

Ein innovativer Ansatz zur LSA-Steuerung
5. Pilotprojekt Nürnberger Platz und Reichenbachstraße
Beispiel:
- Beginn der Grünphase: 53 s nach Abfahrt an der Haltestelle Reichenbachstraße
60
80
100
Vorausschauende Fahrt/s
0 100 200 300 400 500 6000
20
40
60 Fahrt
Zeit
Position /m
40
60
hw. /
km/h
0 100 200 300 400 500 6000
20
Position /m LSA
Beharrungsfahrt mit 35 km/h verhindert Halt an LSA
Ges
ch Energieeinsparung ca. 11%
0 100 200 300 400 500 6000
10
20LSA
Höh
e /m
Maximaler Anstieg 4,1%
Seite 23Prof. Dr.-Ing. J. Krimmling6. ViMOS-Tagung
0 100 200 300 400 500 600
Position /m

Ein innovativer Ansatz zur LSA-Steuerung
6. Zusammenfassung und Ausblick
- erste kooperative LSA mit Bezug zum Ö
Zusammenfassung und Ausblick Das Bildelement mit der Beziehungs-ID rId3 wurde in der Datei nicht gefunden.
ÖPNV und der Realisierung energiesparender Fahrweisen
- komplette Inbetriebnahme Anfang 2011komplette Inbetriebnahme Anfang 2011
- hoher Schnittstellenaufwand zwischen den verschiedenen Systemen, gute Z b it i h dZusammenarbeit zwischen den Betreibern, Firmen und Entwicklern
- 2011: Systemerweiterung auf 5 LSA y gsüdlich des Hauptbahnhofes mit der derzeitigen Umsetzungsstrategie
2012 2013: Erweiterung auf alle 20 LSA- 2012-2013: Erweiterung auf alle 20 LSA im Zuge der Nord-Süd-Verbindung in Dresden mit erweiterter Schnittstelle von und zum RBL der DVBAG
Seite 24Prof. Dr.-Ing. J. Krimmling6. ViMOS-Tagung
und zum RBL der DVBAG

Ein innovativer Ansatz zur LSA-Steuerung
6. Zusammenfassung und Ausblick
(n. Taucha)
Betrachtung der Linie 3Hauptzielstellungen:
135
3
• Realisierung energie-sparender Fahrweisen auf eingleisigen St k b h itt 2
45
6
Streckenabschnitten• Sicherung planmäßiger
Anschlüsse
8
1 5 7
7• Prognose der Ankunfts-reihenfolge und Anzeige auf der DFI 4
83/
• bedarfsgerechtes Einfädeln
• Verbesserung der
2
• Verbesserung derSteuerung für alleVerkehrsteilnehmer 3 6
Seite 25Prof. Dr.-Ing. J. Krimmling6. ViMOS-Tagung

Ein innovativer Ansatz zur LSA-Steuerung
Vielen Dank für IhreAufmerksamkeit!
Seite 26Prof. Dr.-Ing. J. Krimmling6. ViMOS-Tagung











![Calculating transition amplitudes by variational quantum ...UCC-SD ansatz RSP ansatz (Real-valued symmetry preserving ansatz)! [Å] ! [Å]! [Å]! [Å]] For symmetry-preserving ansatz,](https://static.fdocuments.net/doc/165x107/5ed84fd36664347bbe091f0b/calculating-transition-amplitudes-by-variational-quantum-ucc-sd-ansatz-rsp-ansatz.jpg)






