Eigenvalue problems and NXP PowerPoint template (Title ... › casa › meetings › special ›...
64
NXP PowerPoint template (Title) Template for presentations (Subtitle) Name Eigenvalue problems and model order reduction in the electronics industry Joost Rommes [[email protected]] NXP Semiconductors/Corp. I&T/DTF/A&M/PDM/Mathematics O-MOORE-NICE! COMSON Autumn School on MOR, Terschelling September 21–25, 2009
Transcript of Eigenvalue problems and NXP PowerPoint template (Title ... › casa › meetings › special ›...

NXP PowerPoint template (Title)Template for presentations (Subtitle)
Name
Subject
Project
MMMM dd, yyyy
Eigenvalue problems andmodel order reductionin the electronics industry
Joost Rommes [[email protected]]NXP Semiconductors/Corp. I&T/DTF/A&M/PDM/MathematicsO-MOORE-NICE!
COMSON Autumn School on MOR, TerschellingSeptember 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Introduction
Part I: Examples from the electronics industry
Part II: Large networks: MOR or fast solvers?
Part III: Eigenvalue problems in MOR
Concluding remarks
2/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Introduction
I More functionality on smaller chips
I Decreasing device sizes
I Increased complexity
I Need for fast design cycles
I Need for first-time-right
I Many transistors and . . .
I . . . many parasitic effects
I Need for advanced mathematicalmethods!
3/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Outline
Part IExamples from the electronics industry
I Electro Static Discharge analysis
I Extracted parasitics
I Handle wafer simulations
I Layout optimization and place/route
I Pole-zero analysis and sensitivities
4/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Electro Static Discharge analysisDamaged interconnect that was too small to conduct current
5/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Extracted parasitics
Analogue design involves
1. Design circuit on schematic level
2. Then refine layout for parasitics
I Typical parasitics: R, L, C
I Up to millions of RLCs
I Heavy demand on analoguesimulator
Hence MOR and/or fast solvers are needed!
6/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Handle wafer simulations
I Noise propagates via handle wafer
I Where to place handle wafer contacts to limit noise?
7/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Handle wafer simulations
Two needs:
1. Given HW contacts, how big is noise? (AC analysis: sparsesolvers)
2. Equivalent circuit model for full system simulation (MOR)
Work with Maria Ugryumova, and Kapora/De Haas/Bakker (NXP)
8/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Layout optimization, place/route
Analogue design involves
1. Design circuit on schematic level
2. Optimize schematic circuit
3. Repeat on layout level, includingparasitics
I Can we optimize automatically?
I Can we place and routeautomatically?
I Yes, by parameterization andderivative-free optimization
Work with Beelen/Jeurissen/De Jong/Schilders (NXP)
9/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
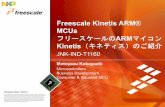
Pole-zero stability analysisFrequency response of circuit (1000 unknowns). Pole+994 · 103 ± i5.6 · 106 causes peak around 6MHz.
1.010.0
100.01.0k
10.0k100.0k
1.0M10.0M
100.0M1.0G
10.0G
(LOG)
-60.0
-50.0
-40.0
-30.0
-20.0
-10.0
0.0
10.0
20.0 (LIN)
Oct 17, 200716:38:18
names: A_* --> 3 stability_ne.qr.sdif (AC)Bode Plot + B_* --> 1 stability_ne_dpa_3.cgap (AC)Bode Plot
Analysis: AC
User: nlv18077 Simulation date: 17-10-2007, 10:21:28
File: /home/nlv18077/test/pstar/stability_ne.qr.sdif
F
- y1-axis -
A_DB(VN(VREG))
B_DB
10/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
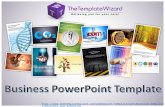
Sensitive eigenvalues
How to compute the eigenvalues that are most sensitive toparameter changes?
−35 −30 −25 −20 −15 −10 −5 00
2
4
6
8
10
12
14
16
18
real (1/s)
imag
(ra
d/s)
KPSS = 1
KPSS = 2,...,50
Work with Nelson Martins (CEPEL)
11/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Outline
Part IILarge networks: MOR or fast solvers?
12/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Resistor network modelingKirchhoff’s Current Law and Ohm’s Law for resistors lead to[
R −PPT 0
] [ibv
]=
[0in
]or Gv = in
where
I N is number of resistors
I n is number of nodes
I R = diag(r1, . . . , rN) ∈ RN×N (resistances)
I P ∈ {−1, 0, 1}N×n (incidence matrix)
I ib ∈ RN (resistor currents)
I in ∈ Rn (injected node currents)
I v ∈ Rn (node voltages)
I G = PTR−1P ∈ Rn×n with G = GT ≥ 0
13/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Resistor network modeling
I Kirchhoff’s Current Law and Ohm’s Law for resistors lead to[R −P
PT 0
] [ibv
]=
[0in
]I Eliminating resistor currents ib (MNA):
Gv = in,
where G = PTR−1P ∈ Rn×n with G = GT ≥ 0
I Systems made independent by grounding v(gnd) = 0
I Systems are very sparse in general
14/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Results for computing resistor currents1. Reorder G (AMD)
2. Solve v from Gv = in (sparse: Cholesky)
3. Compute ib = R−1Pv
Table: CPU times for Spectre, Pstar, and fastR. * denotes error.
#nodes #Rs Spectre Pstar fastR Speedup
1 5k 6k 3s 2.15 0.2s 15 102 19k 46k 180s 149s 0.8s 225 1863 32k 94k 573s 400s 1.5s 382 2674 32k 99k 600s 400s 1.5s 400 2675 36k 188k 2900s* 481s 7s 414* 686 72k 476k 17700s 6600s 8s 2212 8257 560k 917k 64300s* * 21s 3060* ∞8 586k 1.5M * * 23s ∞ ∞9 2M 6M * * 330s ∞ ∞
15/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Reduction of large networks
I Speed-up design cycle and enable First-Time-Right
I Enlarge capacity of optimization software
16/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Reduction of resistor networks
I Given a very large resistor network described by I = GV , findan equivalent network with
(a) same terminals(b) same path resistances between terminals(c) n � n internal nodes(d) r � r resistors(e) easy (re)use in design flow (netlist)
Requirement (d) is essential in practice
I Use tools from graph theory to recover part of the structure
17/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Reduction of resistor networksEliminating all internal nodes not an option:
I satisfies conditions (a)–(c),
I but violates (d) and (e): r = (m2 −m)/2 resistors in ROM!
I example with 12738 nodes, 340 terminals, 21209 resistors
ROM has 0 internal nodes, same terminals, but 57630 resistors!
18/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Outline of reduction approach
1. Select components for reduction
2. Find important internal nodes
3. Eliminate non-important internal nodes
4. Synthesize reduced resistor network
I No approximations are made: resulting ROM is exact!
I Paper ”Efficient methods for large resistor networks” toappear in IEEE TCAD (with Wil Schilders)
19/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Step 1: Select components for reduction
1
23
4
5
6
78
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
81
76
7778
79
80
82
8384
85
86
91
87
88
89
90
92
93
9495
9697
98
99
100
101
102
103
104
105
10611
1
107
108
109
110
11211
4
11311
8
115
116
117
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
13413
9
135
136
137
138
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
15615
7
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
21321
4
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
20/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Step 2: Find important internal nodes
1
2 3
4
5 6
7
89
10
1112
13
1415
16
1718
1920
21
2223
24
2526
27
28
29
30
31
3233
34
3536
37
38
39
40
41
42
43 44
45
4647
48
49 50
5152
53
54
Graph and matrix reordering algorithms (AMD)
21/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Step 3: Eliminate non-important internal nodes
0 10 20 30 40 50 60
0
10
20
30
40
50
60
nz = 34810 10 20 30 40 50 60
0
10
20
30
40
50
60
nz = 1506
Figure: Left: 59 nodes, 1711 resistors. Right: 64 nodes, 721 resistors
I Left: eliminate all internal nodes
I Right: preserve five internal nodes
I Selective (AMD) elimination reduces fill-in
I Terminals are preserved
22/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Step 4: Synthesize reduced order resistor network
Reduced netlist can be (re)used in design flow
23/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Results for reducing networks
I Results for four resistor networks
I ESD analysis of realistic layouts (I–III)
I Parasitic interconnect reduction (IV)
Network I Network II Network III Network IVOrig ROM Orig ROM Orig ROM Orig ROM
#terminals 3260 1978 15299 8000#int nodes 99k 8k 101k 1888 1M 180k 46k 6k#resistors 161k 56k 164k 39k 1.5M 376k 67k 26k
#other devs 1874 1188 8250 29k#other nodes 0 0 0 11k
CPU red 130 s 140 s 1250 s 75 sCPU sim 67h 6h 20h 2h – 120h – 392sSpeed up 11x 10x ∞ ∞
24/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
RC and RCLk networks
I Reduction not always needed (AC, pole-zero analysis)I If reduction is needed for many-terminal systems
I Use similar graph algorithmsI Elimination like in R networks not accurateI Use conventional MOR methods like
I Moment matching via Krylov [Celik, Grimme, . . . ]I Balanced truncation/ADI [Moore, Benner, Stykel, Freitas, . . . ]I Modal truncation via dominant poles [Martins, R., . . . ]I Spectral zero interpolation [Antoulas, Sorensen, Ionutiu, . . . ]
I Solves state reduction in general
I The big open question is:
How to reduce number of elements significantly?
Work with Roxana Ionutiu (linear) and Michael Striebel (nonlinear)
25/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Outline
Part IIIEigenvalue problems in MOR
26/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Computation of system properties
Eigenvalues and eigenvectors are important forI Determining system stability
I Are there λ with Re(λ) > 0?
I Determining resonance frequenciesI Dominant poles and corresponding eigenvectors
I Determining parameter sensitivities
I PSS computations
I . . .
27/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
The generalized eigenvalue problem (non-defective)
Given A,E ∈ Rn×n, find (λ, x, y) that satisfy
Ax = λEx, x 6= 0
y∗A = λy∗E , y 6= 0
An eigentriplet (λ, x, y) consists of
λ ∈ C eigenvalue
x ∈ Cn right eigenvector
y ∈ Cn left eigenvector
I (A,E ) has n eigenvalues (real / complex conjugated pairs)
I Corresponding eigenspaces need not be n-dimensional
I Bi-orthogonality: λi 6= λj ⇒ y∗j Exi = 0
28/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Eigenvalue decompositions
Complete eigenvalue decomposition (Λ,X ,Y ):
AX = EXΛ, Y ∗A = ΛY ∗E with Y ∗EX = I ,Y ∗AX = Λ
Λ = diag(λ1, λ2, . . . , λn) ∈ Cn×n
X = [x1, x2, . . . , xn] ∈ Cn×n
Y = [y1, y2, . . . , yn] ∈ Cn×n
In practice only interest in k � n eigentriplets: partial ED
AXk = EXkΛk , Y ∗k A = ΛkY ∗
k E with Y ∗k EXk = I ,Y ∗
k AXk = Λk
Λk = diag(λ1, λ2, . . . , λk) ∈ Ck×k
Xk = [x1, x2, . . . , xk ] ∈ Cn×k
Yk = [y1, y2, . . . , yk ] ∈ Cn×k
29/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Eigenvalue computations
Methods for complete eigendecompositions:
I QR method for AX = XΛ
I QZ method for AX = EXΛ
I Complexity O(n3), practical use up to n ≈ 3000
Methods for partial eigendecompositions:
I Krylov methods (Lanczos, Arnoldi)
I Newton based methods (Jacobi-Davidson [Sleijpen, Van derVorst (1995)])
I No dense matrix computations needed
I Careful selection strategies needed
30/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
First-order dynamical systems
First-order SISO dynamical system{E x(t) = Ax(t) + bu(t)y(t) = c∗x(t) + du(t)
where
u(t), y(t), d ∈ R, input, output, direct i/o
x(t),b, c ∈ Rn, state, input-to-, -to-output
E ∈ Rn×n, system (descriptor) matrix
A ∈ Rn×n, system matrix
31/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Transfer functionFirst-order SISO dynamical system (d = 0):{
E x(t) = Ax(t) + bu(t)y(t) = c∗x(t)
with transfer function
H(s) = c∗(sE − A)−1b
Poles are λ ∈ C for which
lims→λ
H(s) = ∞,
or, equivalently,det(λE − A) = 0,
i.e. the eigenvalues of (A,E )
32/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Transfer function H(s) = c∗(sE − A)−1b (proper)
Can be expressed as
H(s) =n∑
i=1
Ri
s − λi,
where residues Ri are
Ri = (c∗xi )(y∗i b),
and (λi , xi , yi ) are eigentriplets (i = 1, . . . , n)
Axi = λiExi , right eigenpairs
y∗i A = λiy∗i E , left eigenpairs
y∗i Exi = 1, normalization
y∗j Exi = 0 (i 6= j), E -orthogonality
33/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Dominant poles cause peaks in Bode-plot
H(s) = c∗(sE − A)−1b =n∑
i=1
Ri
s − λiwith Ri = (c∗xi )(y
∗i b)
Bode-plot is graph of (ω, |H(iω)|)I frequency ω ∈ RI magnitude |H(iω)| (usually in dB)
Consider pole λ = α + βi with residue R, then
limω→β
H(iω) = limω→β
R
iω − (α + βi)+
n−1∑j=1
Rj
iω − λj
= −R
α+ Hn−1(iβ)
Hence pole λ with large∣∣∣ RRe(λ)
∣∣∣ causes peak (dominant)
34/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Dominant poles cause peaks in Bode-plot
35/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Dominant Pole Algorithm [Martins (1996)]
H(s) = c∗(sE − A)−1b
I Pole λ: lims→λ H(s) = ∞, or lims→λ1
H(s) = 0
Apply Newton’s Method to 1/H(s):
sk+1 = sk +1
H(sk)
H2(sk)
H ′(sk)
= sk −c∗(skE − A)−1b
c∗(skE − A)−1E (skE − A)−1b
Note dHds = −c∗(skE − A)−1E (skE − A)−1b
36/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Dominant Pole Algorithm
1: Initial pole estimate s1, tolerance ε � 12: for k = 1, 2, . . . do3: Solve vk ∈ Cn from (skE − A)vk = b4: Solve wk ∈ Cn from (skE − A)∗wk = c5: Compute the new pole estimate
sk+1 = sk −c∗vk
w∗kEvk
6: The pole λ = sk+1 with x = vk/‖vk‖2 and y = wk/‖wk‖has converged if
‖(sk+1E − A)x‖2 < ε
7: end for
37/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
DPA: Complexity
Every iteration solves of
(skE − A)vk = b and (skE − A)∗wk = c
Can be done efficiently:
I Fill-in minimizing reordering: AMD [Davis, Duff]
I Reuse LU = skE − A as U∗L∗ = (skE − A)∗
I Scalable up to millions of unknowns for sparse systems
If solves cannot be done exactly (CPU/MEM):
I Jacobi-Davidson style methods [Sleijpen/Van der Vorst,Hochstenbach, R.]
I Recycling Krylov spaces [De Sturler]
38/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Twosided Rayleigh quotient iteration
Note that with v ≡ vk and w ≡ wk
sk+1 = sk −c∗(skE − A)−1b
w∗Ev
= skw∗Ev
w∗Ev− c∗(skE − A)−1(skE − A)(skE − A)−1b
w∗Ev
=w∗Av
w∗Ev
Step DPA Twosided RQI
3 solve (skE − A)vk = b solve (skE − A)vk = Evk−1
4 solve (skE − A)∗wk = c solve (skE − A)∗wk = E ∗wk−1
Original work on twosided RQI [Ostrowski (1958), Parlett (1974)]
39/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Convergence behavior: DPA vs. RQI
40/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Dominant Pole Algorithm (DPA) and extensionsDPA computes dominant poles of H(s) = c∗(sE − A)−1b
1. Newton scheme [M., Lima, Pinto (IEEE TPWRS 11(1) 1996]
2. Nice convergence behavior [R., Sleijpen (SIMAX 30(1) 2008)]
3. Subspace acceleration, selection, deflation: SADPA [R.,Martins (IEEE TPWRS 21(3) 2006)]
4. Poles of MIMO systems: SAMDP [R., Martins (IEEE TPWRS21(4) 2006)]
5. Dominant zeros [R., Martins, Pellanda (IEEE TPWRS 22(4)2007)]
6. Poles of second-order systems: QDPA [R., Martins (SISC30(4) 2008)]
7. Spectral zeros [Ionutiu, R., Antoulas (IEEE TCAD 27(12)2008]
8. Sensitive poles: SPA [R., Martins (IEEE TPWRS 23(2) 2008)]
41/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Computation of most sensitive eigenvalues
I Suppose system matrix A depends on parameter p
I Sensitivity of eigenvalue is given by
∂λ
∂p= y∗
∂A
∂px
where y and x are left and right eigenvectors
I In stabilizer design one is interested in eigenvalues mostsensitive to parameter changes
I See [R., Martins, IEEE TPWRS 23(3) 2008] for more details
42/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Computation of most sensitive eigenvalues
−3.5 −3 −2.5 −2 −1.5 −1 −0.5 0 0.50
2
4
6
8
10
12
14
real (1/s)
imag
(rad
/s)
Figure: Root locus of most sensitive eigenvalues for 13k state system.
43/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Residues and sensitivitiesI Recall
H(s) = c∗(sI − A)−1b =n∑
i=1
Ri
s − λi,
where residues Ri are
Ri = (c∗xi )(y∗i b),
and (λi , xi , yi ) are eigentriplets
I If ∂A∂p has rank 1:
∂λ
∂p= y∗
∂A
∂px = y∗(bc∗)x = (y∗b)(c∗x) = (c∗x)(y∗b)
I Sensitive eigenvalues of A are dominant poles of (A,b, c)
I Apply DPA to (A,b, c) to compute sensitive eigenvalues!
44/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
The case rank(∂A∂p ) > 1
I Derivative of A to p can be written as ∂A∂p =
∑ki=1 bic
∗i
I Sensitivity of eigenvalue is given by
∂λ
∂p= y∗
∂A
∂px =
k∑i=1
(y∗bi )(c∗i x) = trace(C ∗x)(y∗B).
where y and x are left and right eigenvectors
I SAMDP can be used to compute sensitive eigenvalues
I More effective alternative is to update right-hand sides
b =∂A
∂pvk and c =
∂A
∂p
∗wk
45/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Sensitive Pole Algorithm (SPA)
1: Set v0,w0 ∈ Rn s.t. Apv0 6= 0 and A∗pw0 6= 02: for k = 0, 1, 2, . . . do3: b = Apvk/‖Apvk‖2
4: c = A∗pwk/‖A∗pwk‖2
5: Solve vk+1 ∈ Cn from (skE − A)vk+1 = b6: Solve wk+1 ∈ Cn from (skE − A)∗wk+1 = c7: Compute the new pole estimate
sk+1 = sk −c∗vk+1
w∗k+1Evk+1
8: The pole λ = sk+1 with x = vk+1/‖vk+1‖2 andy = wk+1/‖wk+1‖2 has converged if
‖Ax− sk+1Ex‖2 < ε
9: end for46/64
NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Multiple parameters
I A ≡ A(p1, p2, . . . , pk) depends on multiple parameters pi
I Derivative (gradient) of λ is given by:
∇λ = (y∗∂A
∂p1x, . . . , y∗
∂A
∂pkx)
I Sensitivity in unit direction di ∈ Rk for pi
sensitivity(λ,d) ≡ |∇λ · d|
Note directional derivative can be written as
∇λ · d =k∑
i=1
diy∗ ∂A
∂pix = y∗Apx
I Use SPA (steps 3 and 4) with Ap where Ap =∑k
i=1 di∂A∂pi
I Entries of d typically equal to parameter increments
47/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
41-State power system
I Descriptor realization has dimension n = 136
I Power system stabilizer gain (Kpss) controlled by a116,115
aj116,115 = j , (j = 2, . . . , 50)
I Most sensitive poles with respect to Kpss:
pole y∗ ∂A∂p x symbol hits SPA hits RQI
−22.1 + 4.64i −1.24 + 2.00i x 48% 35%−5.37 + 5.64i +0.10 + 1.23i circle 23% 4%+0.53 + 5.41i −0.13 + 0.02i square 7% 3%−1.28 + 4.37i −0.04− 0.11i * 1% 3%
48/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
−35 −30 −25 −20 −15 −10 −5 00
2
4
6
8
10
12
14
16
18
real (1/s)
imag
(ra
d/s)
KPSS = 1
KPSS = 2,...,50
Figure: Full spectra of the 41-state power system matrices (Aj ,E ), where
aj116,115 = j (j = 1, . . . , 50), computed by the QZ method.
49/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
−35 −30 −25 −20 −15 −10 −5 00
2
4
6
8
10
12
14
16
18
real (1/s)
imag
(ra
d/s)
Λ(A1)
SASPA(A1)
SASPA(Ai)
Figure: Sensitive pole traces for (Aj ,E ), where aj116,115 = j
(j = 1, . . . , 50), computed by SASPA with s0 = 1i (six poles every run).
50/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
BIPS/97: 1664-state system
I Descriptor realization has dimension n = 13250
I Single and multiple parameter root loci
Table: Generators, PSS gain ranges, and increments for BIPS(cf. Figure 5 and 6).
generator element gain (min, max) increment
Xingo a4971,4970 (0, 15) 0.5Paulo Afonso IV a4901,4900 (0, 15) 0.5
Itaipu Kp a4973,4972 (0, 2.2) 0.0733Itaipu Kw a4978,4977 (0, 10.35) 0.345
51/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
−3.5 −3 −2.5 −2 −1.5 −1 −0.5 0 0.50
2
4
6
8
10
12
14
real (1/s)
imag
(rad
/s)
Figure: Multi-parameter RL plot of sensitive poles of BIPS/97 bySASPA. Various poles become more damped as PSS gains increase, twocritical rightmost poles crossing the imag axis and the 5% damping ratioboundary. Squares: poles when three PSSs have zero gain.
52/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
−3.5 −3 −2.5 −2 −1.5 −1 −0.5 0 0.50
2
4
6
8
10
12
14
real (1/s)
imag
(ra
d/s)
Figure: Multi-parameter RL plot of poles of BIPS/97 by QR. Variouspoles become more damped as PSS gains increase, two critical rightmostpoles crossing the imag axis and 5% damping ratio boundary. Squares:poles when three PSSs have zero gain.
53/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Running times SASPA vs. QR
Table: CPU times (seconds) for computation of root-locus plots withSASPA and the QR method for BIPS/97 and BIPS/07. Notation:S=single parameter, M=multiple parameters, n=number of states,N=dimension of descriptor realization, steps=number of steps in theroot-locus.
BIPS S/M n N steps SASPA(#poles) QR
97 S 1664 13250 60 1450 (10) 780097 M 1664 13250 30 1400 (10) 360097 M 1664 13250 30 3000 (20) 360007 M 3172 21476 30 4664 (20) 24000
54/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Applications of DPA and SPA
I Pole-zero analysis in circuit simulation
I Stability analysis
I Behavioral modeling
I Inverse problems?I Applications in model order reduction
I Modal approximationI Combinations with rational Krylov methodsI MOR for parameterized systems?
55/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Modal approximation and moment matching
0 2 4 6 8 10 12 14 16 18 20−90
−80
−70
−60
−50
−40
−30
−20
Frequency (rad/s)
Gai
n (d
B)
SADPA (k=12)Dual Arnoldi (k=30)Orig (n=66)
Figure: Frequency response of complete system (n = 66), modalapproximation (k = 12), and dual Arnoldi model (k = 30).
56/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Dominant poles: location in complex plane
−16 −14 −12 −10 −8 −6 −4 −2 0 2−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
real
imag
exact polesSADPA (k=12)Dual Arnoldi (k=30)
region of interest
Figure: Pole spectrum of complete system (n = 66), modalapproximation (k = 12), and dual Arnoldi model (k = 30).
57/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Dominant poles: location in complex plane (zoom)Dominant poles not necessarily at outside of spectrum
−1 −0.9 −0.8 −0.7 −0.6 −0.5 −0.4 −0.3 −0.2 −0.1 0 0.1
−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
real
imag
exact polesSADPA (k=12)Dual Arnoldi (k=30)
Figure: Pole spectrum (zoom) of complete system (n = 66), modalapproximation (k = 12), and dual Arnoldi model (k = 30).
58/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Inverse problems
Q1: compute eigenvalues most sensitive to parameterchanges?
1. Define parameters of interest (and their ranges)
2. Apply SPA to compute most sensitive eigenvalues
Q0: which parameters must be tuned, and how, to moveeigenvalue(s)?
I Brute force uses SPA for every parameter and rankssensitivities
I More elegant solutions to this inverse problem?
59/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Modal approximation vs. moment matching
I Modal approximation (project on eigenspace)+ sparse ROMs, preservation of poles– may be expensive, requires decay in residues
I Moment matching (project on Krylov space)+ cheap and robust implementations– dense ROMs, requires decay in moments
I Best results usually obtained by combining both: usedominant poles for improving Krylov models and/ordetermining shifts in rational interpolation
Q Can we combine both methods for parameterizedMOR?
60/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
MOR for parameterized systems
I Multi-parameter moment matching [Bai, Daniel, Ioan]
I Parameterized modal approximation:
H(s, p) =n∑
i=1
Ri (p)
s − λi (p)
1. Compute dominant and sensitive poles and eigenvectors,including the sensitivities
2. Construct parameterized reduced order model byparameterizing
I dominant and sensitive poles (λ(p))I eigenspaces X (p) and Y (p)
I Combine moment matching with parameterized sensitiveeigenspace
61/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Concluding remarks
I Mathematical problems occur in several applications:I ESD analysisI Reduction of large parasitic networksI Modeling of handle wafers and thermal effectsI Circuit analysis and optimization
I State-of-the-art mathematics helps inI getting insight in problemsI speeding up design cycleI obtaining first-time-right
I Combinations of techniques are required
The challenges are:
I Large-scale and parameterized systems
I Nonlinearity
I Many inputs, outputs, and parameters
62/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
Thank you!
[email protected]/site/rommes
MOOREN I C E!
63/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009

Subject/Department, Author, MMMM dd, yyyy
CONFIDENTIAL 3
1 3
mathematics in industry 13
ISBN 978-3-540-78840-9
Wilhelmus H. A. SchildersHenk A. van der Vorst · Joost Rommes
Model Order ReductionTheory, Research Aspects and Applications
Model Order Reduction
Schilders Van der Vorst · Rom
mes
1The goal of this book is three-fold: it describes the basics of model order reduction and related aspects in numerical linear algebra, it covers both general and more specialized model order reduction techniques for linear and nonlinear systems, and it discusses the use of model order reduction techniques in a variety of practical applications. The book contains many recent advances in model order reduction, and presents several open problems for which techniques are still in development. It will serve as a source of inspiration for its readers, who will discover that model order reduction is a very exciting and lively field.
W. H. A. Schilders · H. A. van der Vorst · J. RommesModel Order Reduction
mii
13
THE EUROPEAN CONSOR TIUM FOR MATHEMATICS IN INDUSTRY
Available now at Springer!
64/64NXP Semiconductors Corp. I&T/DTF, Joost Rommes, September 21–25, 2009