Efiective Vibro-Acoustical Modelling of Rubber …8332/...Efiective Vibro-Acoustical Modelling of...
37
Effective Vibro-Acoustical Modelling of Rubber Isolators by Michael Coja Stockholm 2005 Doctoral Thesis Royal Institute of Technology School of Engineering Sciences Department of Aeronautical and Vehicle Engineering The Marcus Wallenberg Laboratory for Sound and Vibration Research
Transcript of Efiective Vibro-Acoustical Modelling of Rubber …8332/...Efiective Vibro-Acoustical Modelling of...

Effective Vibro-Acoustical
Modelling
of Rubber Isolators
by
Michael Coja
Stockholm 2005
Doctoral Thesis
Royal Institute of Technology
School of Engineering Sciences
Department of Aeronautical and Vehicle Engineering
The Marcus Wallenberg Laboratory for Sound and Vibration Research

Akademisk avhandling som med tillstand av Kungliga Tekniska Hogskolan i Stockholm
framlaggs till offentlig granskning for avlaggande av teknologie doktorsexamen den 16 juni
2005, kl 10.00 i D3, Lindstedtsvagen 5, KTH, Stockholm.
ISSN 1651-7660TRITA-AVE 2005:25ISBN 91-7178-104-8
c©Michael Coja, June 2005


Kookaburra
Koo-ka bur-ra bor i ett
Gum - mi trä - d
Gum-mi trä-det va-jar han
va - jar me - d
� � � � Sjung Koo-ka - bur-ra Sjung Koo-ka - bur-ra
Gum - mi trä - dets Kung !

Preface
The work forming this thesis was carried out between June 2001 and June 2005 atthe Marcus Wallenberg Laboratory for Sound and Vibration Research (MWL) partof the Department of Aeronautical and Vehicle Engineering at the Royal Instituteof Technology in Stockholm. The main source of funding for my research activitiescoming from the European Project for Growth NORMA, I gratefully acknowledgethe European Commission and the Marcus Wallenberg Laboratory for their financialsupport.During these years I encountered people who have helped me to accomplish this thesisand I would like to express my gratitude to them. First of all, I want to thank mysupervisor Leif Kari for his constant availability and his excellent guidance in thesubject and in the world of scientific research.I am also grateful to Anders Nilsson (former Head of the MWL) who first invited meto start working at the MWL; to Kent Lindgren and Danilo Prelevic for their technicalsavoir faire in the laboratory works; to my room colleagues for their conviviality; toAnthony Vinogradoff for his linguistic help and to all the MWL staff which formssuch an interesting multi-cultural working environment.I would like to send special thanks to my family, Danielle, Henri, Agnes and Isabellewho have always been a great support to me despite the physically long distanceseparating us.Finally, to all the persons I mentioned and to those I forgot to mention I would liketo offer this song, on the opposite page, since music occupies such an important partof my life and also might have been at the very origin of my orientation to acousticalmatters.
Michael Coja
Stockholm in May 2005.


Abstract
This thesis, gathering four papers, concerns the enhancement in understanding andmodelling of the audible dynamic stiffness of vibration rubber isolators includingexperimental measurements.
Paper A studies the performances of three different types of vibration isolator usingan indirect measurement technique to estimate the blocked dynamic transfer stiffnessof each specimen. The measurements are performed over a wide audible frequencyrange of 200 to 1000 Hz in a specially designed test rig enabling the investigation ofarbitrary preload influences.
Paper B addresses the modelling of the audible-frequency stiffness of the rubberconical mount experimentally appraised in Paper A accounting for preload effects.The model is based on a simplified waveguide approach approximating the nonlin-earities attributed to the predeformations by adopting shape factor considerations.The carbon black filled rubber is assumed incompressible, displaying a viscoelasticbehavior based on a fractional derivative Kelvin–Voigt model efficiently reducing thenumber of required material parameters.
In Paper C the focus is on the axial dynamic stiffness modelling of an arbitrary longrubber bushing within the audible frequency range. The problems of simultaneouslysatisfying the locally non-mixed boundary conditions at the radial and end surfacesare solved by adopting a waveguide approach, using the dispersion relation for axiallysymmetric waves in thick-walled infinite plates, while fulfilling the radial boundaryconditions by mode-matching. The results obtained are successfully compared withsimplified models but display discrepancies when increasing the diameter-to-lengthratios since the influence of higher order modes and dispersion augments.
Paper D develops an effective waveguide model for a pre-compressed cylindrical vi-bration isolator within the audible frequency domain at arbitrary compressions. Theoriginal, mathematically arduous problem of simultaneously modelling the preloadand frequency dependence is solved by applying a novel transformation of the pre-strained isolator into a globally equivalent homogeneous and isotropic configurationenabling the straightforward application of a waveguide model to satisfy the boundaryconditions. The results obtained present good agreement with the non-linear finiteelement results for a wide frequency range of 20 to 2000 Hz at different preloads.
Key words: Rubber isolator, Bush mounting, Dynamic stiffness, Waveguide, Frac-tional derivatives, Mode-matching, Pre-compressed, Prestrain, Preload, Predeforma-tion, Viscoelasticity, Dispersion


Dissertation
The doctoral thesis consists of this summary and four appended papers listed belowand referred to as Paper A to Paper D. Leif Kari has acted as a supervisor for thisthesis.
Paper AM. Coja, L. Kari 2003: “Rubber versus steel vibration isolators—the audible fre-quency contest”. Submitted to Kautschuk Gummi Kunststoffe.
Paper BM. Coja, L. Kari 2003: “A simple engineering audible-frequency stiffness model fora preloaded conical rubber isolator”. Submitted to Applied Acoustics. A modifiedversion is accepted for presentation at the 4 thEuropean Conference on ConstitutiveModels for Rubber.
Paper CM. Coja, L. Kari 2005: “Axial audio-frequency stiffness of a bush mounting—thewaveguide solution”. Submitted to Applied Mathematical Modelling. A modified ver-sion is accepted for presentation at the 12 thInternational Congress on Sound andVibration.
Paper DM. Coja, L. Kari 2004: “An effective waveguide model for pre-compressed isolators”.Submitted to Acta Acustica united with Acustica. A modified version was acceptedfor presentation at the 17 thNordic Seminar on Computational Mechanics and at theNordic Vibration Research 2004.

Contents
1 Introduction 1
1.1 Background . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Rubber bushing . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Rubber mounting . . . . . . . . . . . . . . . . . . . . . . 2
2 Dynamic stiffness measurement 5
3 Dynamic stiffness modelling 8
3.1 Rubber material dynamic properties . . . . . . . . . . . 8
3.2 Simplified approach . . . . . . . . . . . . . . . . . . . . . 12
3.3 Waveguide solution . . . . . . . . . . . . . . . . . . . . . 14
3.4 Preload dependence . . . . . . . . . . . . . . . . . . . . . 17
4 Conclusions and future works 21
Bibliography 23
Paper A
Paper B
Paper C
Paper D


Chapter 1
Introduction
The origin of the word rubber is attributed to the British chemist Joseph Priestley(1733-1804) who noticed in 1770 the ability of the gummy substance imported fromancient Mesoamerica to erase or rub out pencil marks from paper. Natural rubbercomes from the milky latex sap tapped from the rubber tree and it is believed thatMayan people used it for ritual games and handcrafts as long ago as 1600 BCE. Theirword for the material was cahuchu meaning the weeping wood in quechua language.The rubber material was quite sensitive to the weather getting sticky during warmdays and brittle when it got chilly making its use rather restrained until the accidentaldiscovery of Charles Goodyear (1800-1860) who dropped some lead and sulfur intohot rubber warming on a stove giving birth to a process known as vulcanization.The improvement of the mechanical and chemical properties of rubber broadcast itsindustrial production and utilization worldwide. Today the manufacturing process ofrubber is extremely developed including many types of ingredients such as syntheticrubbers, carbon black fillers, oils, et c. and the indisputable place of the material ina large number of applications can somehow comfort the tears of its father.
1.1 Background
Vibrations produced by industrial or private equipment are usually observed as un-desirable disturbances for their environment as well as for the equipment itself. Aclassic situation consists of an exciting source transmitting structure-borne sound toa receiving structure eventually radiating noise to the vicinity. The attenuation ofthese unwanted vibrations can be achieved in a passive way either by creating animpedance mismatch at the interfaces or by introducing damping into the system.The former implies an increase in the mass of the system or the integration of asoft component as compared to the rest of the structure which will act as a mirror
1

reflecting the audio waves backwards. In most of the applications like for instancevehicle construction an overweigh is synonymous to a drawback as the induced powerincrease required to drive the system will subsequently lead to an augmentation of thefuel consumption being economically and environmentally unfriendly. Hence the sec-ond approach is usually preferable. Rubber components are particularly well suitedto fulfill the task, providing an adequate softness as well as relevant mechanical andchemical properties for many applications. Furthermore, the inherent damping ofthe rubber material contributes to the reduction of structure-borne sound by partlydissipating the parasite motion into thermal energy. In order to control the effect ofsuch devices, an accurate understanding of their dynamic behavior is necessary. Inthis thesis the modelling of the audible-frequency dynamic stiffness of different rubbervibration isolators using a waveguide approach is assigned.
1.2 Rubber bushing
Rubber bushings are commonly utilized in the design of many types of constructionsfor their capacity to account for large axial and torsional deflections while providingstiffer radial and tilting responses. Their efficiency in attenuating audible frequencynoise and vibration transmissions through the structure constitutes an advantage ofgrowing interest for many industrial applications. Typically, a rubber bushing consistsof two concentric shafts bonded to a tubular rubber bearing, finding applications ine.g. truck transmission axles, mountain bikes saddle suspensions. Paper C proposesa model of the axial dynamic stiffness of a rubber bushing, illustrated in Figure 1.1,accounting for any arbitrary dimensions and valid over a wide audible frequency range.
1.3 Rubber mounting
Cylindrical rubber mountings are also widely used in many isolation applicationslike ship engine mounts, train bogie suspensions, bridge bearings, et c. They pos-sess advantageous resilient characteristics, essential for the attenuation of undesirablevibrations, and support large axial loadings. A rubber mounting is traditionally com-posed of a rubber component firmly bonded to rigid metal parts, varying in geometryand types of rubber depending on the application. Paper B and D focus on the mod-elling of the audible frequency dynamic stiffness of two particular types of cylindricalrubber isolators, including preload and frequency dependence. The first mounting,displayed in Figure 1.2.a is composed of two conical rubber layers enrobing a centralmetal element and being firmly attached to an inner and outer metal sleeve. Thesecond isolator, illustrated in Figure 1.2.c comprises a rubber cylinder firmly bondedat each end to a metal plate facilitating the connection to the rest of the equipment.
2

r1 r2
Outer shaft
Inner shaft
l r
z
r ϕ z
Figure 1.1: Rubber bushing schema.
3

a)
c)
b)
Figure 1.2: Rubber mountings: a) Conical rubber isolator; b) Combined steel-rubberisolator; c) Cylindrical rubber isolator.
4

Chapter 2
Dynamic stiffness
measurement
In contrast with the well established dynamic properties of vibration isolators madeof steel, those containing rubber components still require more work to acquire athorough comprehension of their dynamic behavior. When the energy transmissionthrough a resilient mount placed between an exciting source and a receiving structureis focused upon, the dynamic transfer stiffness is an essential quantity to estimate.The difficulty of the task residing essentially in the complexity of the rubber mate-rial, the components geometrical shape and the large pre-deformations under workingconditions, often leads to a single possible modelling approach, although laborious todevelop in some cases: the finite element (FE) analysis. Additionally, the changesin temperature, the fatigue and the oxidation of the material encountered during alifetime in service can result in important dynamic stiffness alterations cumbrous tomodel. Already at its manufacturing process, a rubber compound including a widevariety of ingredients can contract anisotropy likely to be produced by molecular ori-entation and amplified by the adjunction of carbon black fillers, like in the case, forinstance, of injection-molded rubber.
An alternative to assess the dynamic stiffness of rubber components is by perform-ing measurements on a test object, avoiding thereby the theoretical complications. Forthat purpose, two techniques are mainly employed, namely the direct and the indi-rect methods, an international standardized measurement procedure also referring tothem. The direct method used by Snowdon (1979), Nadeau and Champoux (2000),consists in directly measuring the force at the blocked termination of the isolator us-ing a force transducer while capturing the displacement with an accelerometer placedat the excited side, the main disadvantage being the rapid limitation in applicablepreload since load cells are fragile instruments. In the indirect measurement technique
5

utilized by Thompson et al. (1998), Kari (2001), the accelerations at the top and bot-tom terminations of the isolator are recorded to derive the blocked transfer stiffness byuse of Newton’s second law applicable for a wide audible frequency range. Paper A
Test object
Shakers
Figure 2.1: Pictures of the measurement test-rig.
evaluates the performances of three different types of resilient mount through the in-direct measurement of their dynamic transfer stiffness. The experiments are achievedin a specially designed test rig, see Figure 2.1 and 2.2, enabling application of preloadsthrough a hydraulic piston. Two symmetrically positioned electro-dynamic vibrationgenerators excite the distribution plate ensuring a vertical motion while auxiliaryisolators reduce flank transmission to the frame. The three vibration isolators areunder appraisal to equip the engine suspension system of new competitive Europeanhigh speed ferries. The first one is a rubber conical mount including a reinforcingcentral conical steel sleeve, the vulcanized rubber layers being firmly bonded to aninner and outer metal skirt facilitating the connection to other components. Thesecond resilient mount is entirely made of metal consisting of eight identical coil-steelelements filled with damping metallic foam. The last retained isolator combines acentral helical steel spring with inclined natural rubber pads bonded to metal ele-ments. The investigation produced over a wide audible frequency range of 200 to1000 Hz at preloads varying from vanishing to a maximum of 60 kN, clearly revealsa superior vibro-acoustical isolation of the rubber conical mount presenting up to an
6

11 dB lower mean stiffness magnitude compared with the two other devices. In addi-tion the steel and combined steel-rubber designs show highly resonant comportmentsover the examined frequency range, as disclosed by the transfer stiffness peaks, de-teriorating the isolation, while the rubber mount dynamic stiffness varies much moresmoothly with frequency. Besides the strong preload dependence of the rubber isola-tor dynamic transfer stiffness, resulting in neat frequency shifts of the anti-resonancepeak and low-frequency stiffening, the frequency dependence demonstrates a ratio ofmaximum to minimum stiffness magnitude of approximately 24(!), notably modifyingthe definition of ’spring constant’. In the light of these experimental observations, thecomplex behavior recorded of the rubber vibration isolator implies the use of mod-elling approaches capable of accounting for the non-linearities attributed to the finitedeformations caused by preload and include the strong frequency dependence.
6
10 10
6
2
3
1 4
5
7
8 8
9
11
Personal Computer Amplifier
Frequency Analyzer
Charge Amplifiers
Figure 2.2: Schema of the test-rig and measurement set-up: 1. Test object; 2. Forcedistribution plate; 3. Blocking mass; 4. Accelerometers; 5. Strain gauge; 6. Elec-tro dynamic vibration generators; 7. Upper auxiliary isolators; 8. Lower auxiliaryisolators; 9. Heavy and rigid body; 10. Strong columns; 11. Crosshead.
7

Chapter 3
Dynamic stiffness modelling
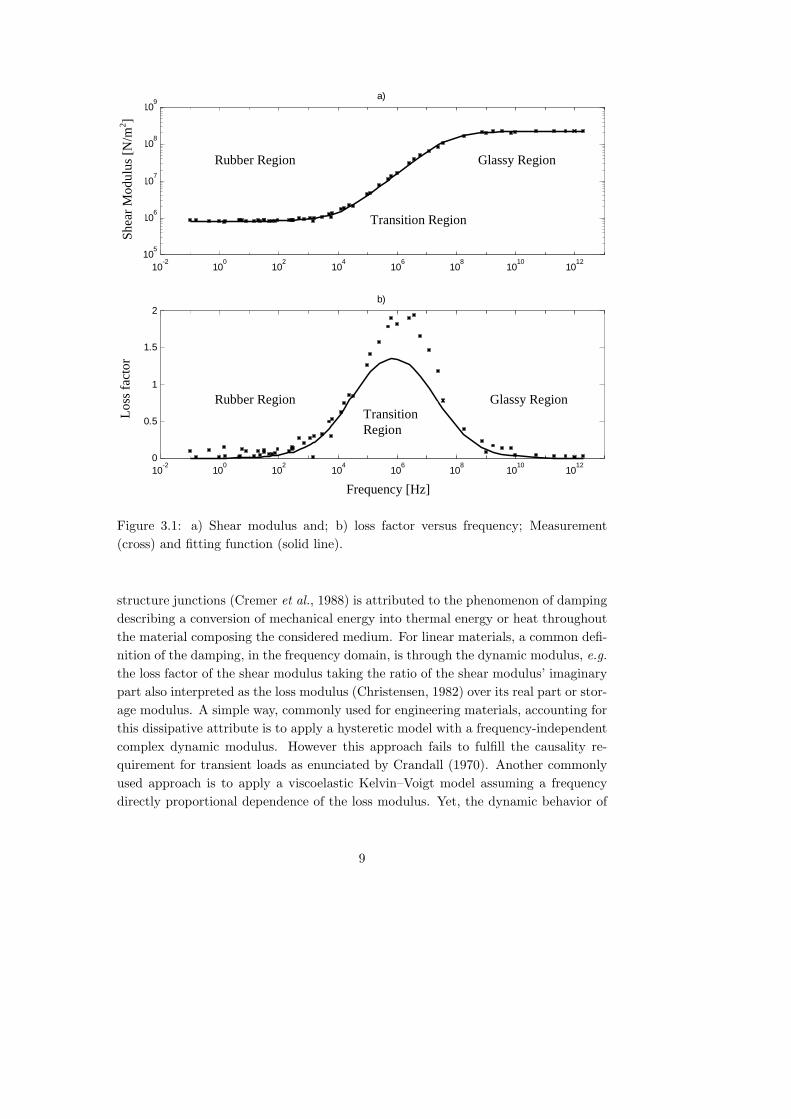
The problem of modelling the dynamic stiffness is decomposed into two assignments:one considering the influence of the isolator geometry, or boundary conditions whilethe other accounts for the rubber material frequency and prestrain dependent structure-borne sound properties. To simplify the task, assumptions of homogeneity andisotropy of the rubber material are made. Although the manufacturing process ofthe rubber compound can engender anisotropy like for instance by injection-molding,a traditional compression molding allied with a proper blending of the ingredients islikely to produce negligible non-homogeneous and anisotropic characteristics. Fur-thermore, the rubber material is assumed nearly incompressible, as usually admittedas long as the hydrostatic stress does not become too large, being elastic in dilatationwhile presenting a linear viscoelasticity in shear deformation. The stiffness dynamicamplitude dependence is disregarded referring to the study by Payne and Whittaker(1971) who reported the absence of low dynamic strain influence on rubber proper-ties in an audible frequency range. Concerning the frequency dependence of rubbermaterial properties, three characteristic zones are distinguished, namely the rubberregion, the transition region and the glassy region, where the shear modulus and theloss factor display singularly different tendencies as shown in Figure 3.1 displayingresults obtained by Kari et al. (2001). In the present work, the focus on a frequencyrange spanning in the audible domain, typically 20 to 20 kHz, confines the materialbehavior to the rubber-like zone, while the considered ambient temperature conditionsprevent low temperature crystallization and glass hardening to occur.
3.1 Rubber material dynamic properties
Within a vibrating system, the decay of the propagating waves and the moderation ofthe resonance amplitudes disregarding attenuation processes due to discontinuity at
8
10-2
100
102
104
106
108
1010
1012
105
106
107
108
109
a)
She
ar M
odul
us [
N/m
2]
Rubber Region
Transition Region
Glassy Region
10-2
100
102
104
106
108
1010
1012
0
0.5
1
1.5
2b)
Loss
fac
tor
Frequency [Hz]
Rubber Region Transition
Region
Glassy Region
Glassy Region
Glassy Region
Rubber Region
Rubber Region
Transition Region
Transition Region
Frequency [Hz]
Los
s fa
ctor
Sh
ear
Mod
ulus
[N
/m2 ]
Figure 3.1: a) Shear modulus and; b) loss factor versus frequency; Measurement(cross) and fitting function (solid line).
structure junctions (Cremer et al., 1988) is attributed to the phenomenon of dampingdescribing a conversion of mechanical energy into thermal energy or heat throughoutthe material composing the considered medium. For linear materials, a common defi-nition of the damping, in the frequency domain, is through the dynamic modulus, e.g.the loss factor of the shear modulus taking the ratio of the shear modulus’ imaginarypart also interpreted as the loss modulus (Christensen, 1982) over its real part or stor-age modulus. A simple way, commonly used for engineering materials, accounting forthis dissipative attribute is to apply a hysteretic model with a frequency-independentcomplex dynamic modulus. However this approach fails to fulfill the causality re-quirement for transient loads as enunciated by Crandall (1970). Another commonlyused approach is to apply a viscoelastic Kelvin–Voigt model assuming a frequencydirectly proportional dependence of the loss modulus. Yet, the dynamic behavior of
9

rubber materials present substantial deviations with these models, requiring a moreadjustable approach to capture its rheological comportment, being likely to find itselfbetween elasticity and viscosity. The usual manner to improve the spring-dashpotmodel is by including higher order derivatives of the stress and strain yielding a seriesof spring-dashpot elements also known as the generalized Kelvin–Voigt model. Lesieu-tre and Mingori (1990) propose an augmenting thermal field model later extended toa three-dimensional anelastic displacement model by Lesieutre and Bianchini (1995).McTavish and Hughes (1993) uses a mini-oscillator approach and Dovstam (1995)presents an augmented Hooke’s law model. Unfortunately, these approaches augmentrapidly and substantially the number of needed parameters to properly match thetrue tendency of the material.
An attractive alternative which gained high interest in recent decades in the de-scription of elastomers’ stress-strain relation, is the introduction of fractional deriva-tives into the viscoelastic theory efficiently reducing the amount of material parame-ters. Since experimental investigations made by Nutting (1921) and Gemant (1936)leading their authors to suggest respectively a fractional power time dependence ofthe stress relaxation and a dynamic modulus varying with frequency raised to frac-tional power, numbers of models applying the fractional calculus theory (Oldhamand Spanier, 1974) to derive material constitutive laws appeared. Bagley and Torvikproposed a general fractional derivative model using three to five empirical constantsto describe the dynamic behavior of elastomers reviewing related contributions inBagley and Torvik (1983) as well as establishing a theoretical basis of the fractionalcalculus approach by molecular theory considerations also recorded by Gaylord et al.(1986) comforting the physical fundament of the approach. Koeller (1984) presentsan interesting connection between fractional calculus and the theory of Abel’s integralequation for material with memory and also proposes an expression of the relaxationand creep process in terms of Mittag–Leffler functions. More recently Enelund andLesieutre (1999) combined fractional calculus with an approach based on anelastic dis-placement fields to model weak frequency dependence damping characteristics. Pritz(2003) applied a five-parameter fractional derivative model to experimental data fromdifferent types of elastomers. Schmidt and Gaul (2002) implement a FE formulationwith three-dimensional fractional constitutive equations to perform a time steppinganalysis of a viscoelastic structure. Non-linear viscoelasticity focusing on the mod-elling of the large strain dependence of polymers’ dynamic modulus is studied byAdolfsson and Enelund (2003), Lion and Kardelky (2004) and Ramrakhyani et al.(2004).
In Paper B, a four-parameter fractional derivative model is employed to matchthe structure-borne sound properties of the vulcanized rubber material containingcarbon black fillers assumed linear, non-aging, isotropic, homogeneous, viscoelasticand incompressible. Expressed in the frequency domain the fractional derivative
10

Kelvin–Voigt model used to describe the dynamic shear modulus takes the form ofa simple, first degree polynome ordered to fractional power efficiently capturing thematerial behavior over the considered audible frequency range. The fractional orderbeing fixed to 1/2 as recommended by Bagley and Torvik (1983) and the static shearmodulus being drawn from Tables, the remaining material parameters are optimizedin a least square sense to fit the stiffness measurement curve at vanishing preload.The shear modulus and the loss factor obtained with the fractional derivative Kelvin–Voigt model are plotted in Figure 3.2 over a frequency range spanning from 200 to1100 Hz.
0
0.5
1
1.5
2
2.5
3x 10
6
Mag
nitu
de (
N/m
2 )
200 300 400 500 10000
0.1
0.2
Frequency (Hz)
Los
s Fa
ctor
Figure 3.2: Shear modulus and loss factor versus frequency obtained with a fractionalderivative Kelvin-Voigt model.
A fractional derivative standard linear solid model embodying a Mittag–Lefflerrelaxation kernel is used in Paper C and D to describe the unfilled, sulfur curednatural rubber material dynamic, viscoelastic shear behavior while the spherical partof the constitutive relation is based on pure elasticity motivating the latter by the nearincompressibility of the rubber. The optimized material parameters are drawn fromthe investigation made by Kari et al. (2001), Figure 3.1 displaying the correspondingshear modulus and loss factor over a wide frequency range.
11

3.2 Simplified approach
The analytical estimation of the dynamic stiffness can rapidly become an arduous tasknecessitating to some extent the use of numerical methods like FE. However underjudicious and physically plausible assumptions simplified models can approximate thereality with acceptable results.
Z
R
r
z
R01
R02
α r01
π/2 − α
w01
w02
h01
h02
Z
R
r
z
R1
R2
α r1
π/2 − α
w1
w2
h1
h2
a)
b)
c)
UR
UZ
ur
uz
π/2 − α
Figure 3.3: Schematic drawings of the vibration isolator geometrical configurations:a) Unloaded isolator configuration; b) Simplified unloaded isolator configuration; c)Equivalent volume preserving preloaded isolator configuration.
Paper B proposes an efficiently simplified model of the rubber isolator measuredin Paper A. The complex geometry of the sandwiched conical mount is simplified byflattening the stress-free curved surfaces of the rubber layers, as indicated in Figure3.3. In addition, under a finite deformation the idealized rectangular cross sectionsare assumed to remain rectangular, simply increasing in width and decreasing in
12

thickness when submitted to compression. The alteration in dimension subsequentto an arbitrary predeformation is derived by expressing the volume conservation ofeach rubber layer during the finite geometrical transformation, being motivated bythe rubber’s incompressible property. A straight-forward one-dimensional dispersivewaveguide model accounting for the surface area variation can then be separately ap-plied in the radial and axial directions to each rubber layer. Considering the rubber
107
108
109
Preload 0kN
Mag
nitu
de (
N/m
) ModelMeasurement
200 300 400 500 1000
−150−100−50
0
Frequency (Hz)
Pha
se (
Deg
ree)
107
108
109
Preload 60 kN
Mag
nitu
de (
N/m
) ModelMeasurement
200 300 400 500 1000
−150−100−50
0
Frequency (Hz)
Pha
se (
Deg
ree)
Figure 3.4: Transfer stiffness magnitude and phase versus frequency at vanishing and60 kN preload. Model (solid line) and measurement (dashed).
layers as infinitely long strips, the radial and axial layer transfer stiffness are derivedbefore obtaining the layer total axial stiffness by properly expressing the total axial
13

displacement and force fields in terms of their radial and axial components. In ad-dition, the influence of the service preload is accounted for by inserting shape factorformulations expressed in terms of the predeformation dependent dimensions of therubber layers. The Newton’s second law provides the global isolator axial frequencydependent stiffness, assuming the metallic conical elements as a rigid body comparedto the rubber parts. Finally, a correction factor given in Tables (Gent, 1992) is in-cluded to account for the amount of carbon black fillers in the vulcanized rubber.Figure 3.4 displays the good agreement obtained between the proposed model andmeasurements in the case of vanishing and maximum preloads.
3.3 Waveguide solution
The description of wave propagation within a medium of finite dimensions is not astraightforward matter. Although some simple well known cases allow to correctlyderive the wave propagation pattern within a given bounded medium, practical prob-lems usually cause difficulties hindering a completely theoretical treatment.
Regarding the modelling of isolator dynamic stiffness, numbers of simplified theo-retical approaches have been extensively used as in the case of cylindrical geometries,the long rod model assuming lateral, plane cross sections remain plane and lateral aswell as stress is distributed uni-axially and uniformly over the section, while neglectingradial expansion and contraction. The Love model extends the long rod including theeffects of radial displacement, however those simplified models produce too inaccurateresults as presented by Kari (2003) especially in more realistic applications where thewidth-to-length ratio of the cylindrical isolator is increased.
The waveguide solution approach presented in Paper C and D, proposes to simul-taneously satisfy the isolator boundary conditions by adopting a subregion matchingmode technique to fulfill the conditions at the bonded surfaces using the dispersionrelation of the infinite cylinder, in D, and that of the thick-walled infinite plate, inC, applying traction free conditions at the remaining boundaries. In this way, theinfluence of higher order modes and dispersion phenomena can be thoroughly inves-tigated. In addition it can be noticed that the application of locally mixed boundaryconditions is usually more favorable as the locally non-mixed conditions tend to ob-struct the resolution of the modelling, grouping it into a non-separable category asindicated by Miklowitz (1984).
In Paper D a waveguide approach is proposed to model the preload and frequencydependence of the dynamic axial stiffness for a pre-compressed cylindrical vibrationisolator made of rubber. The well known Pochhammer–Chree dispersion relation,(Pochhammer, 1876; Chree, 1889) for an infinitely long circular cylinder is used toderive the axial wave numbers, satisfying the traction free condition on the radialsurface. Paper C provides a new formulation of the obtention of the dispersion
14

relation for the axially symmetric non-torsional waves in a tube happening to be inits geometrical limits, the tube being asymptotically extended to a thick-walled plate,the same relation as the Rayleigh–Lamb frequency equation for straight-crested wavesin a plate. Since these dispersion relations were derived, lots of related works werepublished but a problem was persisting: the number of real and imaginary wavenumbers was finite hindering arbitary conditions to be set at the boundary. Adem(1954) was the first to draw the conclusion that an infinite set of wave numbers wasin fact achievable when including the complex solutions. The cumbersome task of
0100
200300
400
−1000
−500
0
500
10000
500
1000
1500
2000
Real wave number (1/m)Imaginary wave number (1/m)
Fre
quen
cy (
Hz)
Figure 3.5: Three dimensional frequency spectrum from Paper C.
calculating the wave numbers is done by using a Newton–Raphson method where theinitial values are obtained by a winding integral method using an implemented versionof the algorithm proposed by Invansson and Karasalo (1993). This evaluation is basedon the argument principle stating that 2π times the difference between the zeros andthe poles of a function is given by the total variation of its argument around a closesingle path surrounding a complex domain. The dispersion relations discussed aboveare however not ideally suited for this treatment since the presence of the square rootoperators leads to branch points, namely the longitudinal and the transversal wave
15

numbers. A modification is hence made by partitioning the domain into adaptedbranch cut free sub-domains. A three dimensional plot derived in Paper C for aninfinite rubber plate of L = 50 mm; displaying the imaginary and real parts of thefirst 16 radial wave numbers versus a frequency range of 20 to 2000 Hz is shown inFigure 3.5.
The fulfillment of the boundary conditions of the different test objects is done byapplying a mode-matching technique dividing the whole domain into subregions whereintegrations of the reduced boundary condition modal series can be performed. Thisapproach enables to include the desired order of modes and improves the convergenceof the results by over-determining the matrix system employing more equations thanunknown modal coefficients. In the case of the cylindrical isolator studied in Paper D,a convergent prediction of the dynamic stiffness is obtained when a number of modessuperior to 64 is included and a single-fold or three-fold over-determined equationsystem is used. Figure 3.6 displays the convergence of the transfer and driving
106
107
Transfer stiffness − 50 mm isolator
Mag
nitu
de (
N/m
) three foldone fold exactly
102
103
105
106
107
Driving point stiffness
Mag
nitu
de (
N/m
)
Frequency (Hz)
Figure 3.6: Transfer and driving point stiffness magnitude versus frequency for H =50mm isolator at maximum pre-compression u0 = 5mm. Exactly determined (P =64), single-fold (P = 128) and three-fold (P = 256) over-determined equation systemwith number of modes N = 128.
point axial dynamic stiffness with respect to the degree of over-determination of theequation system for a cylindrical vibration isolator of diameter D = 100 mm andheight H = 50mm when the number of modes is set to 128. The sensitivity ofthe model to the number of modes is presented in Figure 3.7 where the transfer
16

106
107
Transfer stiffness − 25 mm isolator
Mag
nitu
de (
N/m
)
128 modes64 modes 32 modes 16 modes
102
103
106
107
Driving point stiffness
Mag
nitu
de (
N/m
)
Frequency (Hz)
Figure 3.7: Transfer and driving point stiffness magnitude versus frequency for H =25mm isolator at maximum pre-compression u0 = 10mm. Number of modes N =16, 32, 64, 128, using a three-fold over-determined equation system (P = 2N).
and driving point axial dynamic stiffness for an isolator of diameter D = 100mmand height H = 25 mm is plotted, fixing the over-determination to three-fold andincreasing the amount of modes. Physically these high-order modes contribute to thefulfillment of the displacement and stress boundary conditions at the cylinder ends.In the case of the rubber bushing modelled in Paper C a fewer number of modesis required to obtained a converging solution. Indeed, a relatively small number ofhigher order modes (N = 16) is sufficient to satisfy the boundary conditions at theinner and outer radial surfaces.
3.4 Preload dependence
Under service conditions a vibration isolator is usually submitted to finite pre-strainingbeing the result from the application of the vibrating source’s weight. In Paper Band D the preload dependence of the audible frequency dynamic stiffness is stud-ied, investigating the influence of several arbitrary static preloads on the isolatordynamic behavior. The imposition of a static load modifies the original stress-freeconfiguration into a previously unknown shape rendering uncertain the applicationof the boundary conditions. The complex pre-strained configuration, clearly distinctfrom the reference configuration at rest, is obtained through a finite transformation
17

d0
h0
D
h0
Top edge surface
Bottom edge surface
Figure 3.8: Globally equivalent prestrained configuration.
involving geometrical non-linearities. In addition, the rubber isolator response to a su-perimposed dynamic excitation displays seemingly anisotropic and non-homogeneousfeatures in the finitely transformed state interpretable as material non-linearities. Asuitable way to treat the problem is by using the single integral viscoelastic constitu-tive theories as presented by Zdunek (1992), Kari (2003). However, these approachesusually involving complex mathematical difficulties can render their applications ar-duous and laborious. Moreover, the use of non-linear finite element method packagesdoes not generally facilitate the physical interpretations of the results as no-closedform is achieved.
In Paper B a simplified approach is proposed to model the audible dynamicpreload dependence of a rubber conical mount. Once approximating the geometri-cally complex rubber layers by equivalent infinite strips of rectangular cross-section,the rubber elements are assumed to respond in an incompressible manner to finitepredeformation, the cross-section conserving their rectangular forms. Subsequently,shape factors, defined as in Lindley (1992) as the ratio of the loaded area to thefree area, are derived and incorporated in a closed-form expression of the preloaddependent dynamic stiffness. Despite the good agreement obtained with the mea-surements performed on the isolator, validating the method as a powerful tool forengineering applications, some refinements could be sought to ameliorate the rubber
18

layer waveguide model.Developing a similar approach to create a globally equivalent homogeneous and
isotropic prestrained configuration by use of the rubber incompressibility, as illus-trated in Figure 3.8, Paper D enlightens the influence of the boundary conditionsapplied on the lateral end surfaces of the cylindrical isolator, the model being basedon an ”exact” waveguide solution as described in Section 3.3. To that purpose fourdifferent types of boundary conditions are envisaged for the top and bottom edgesurfaces (see Figure 3.8), namely the free where the shear and axial stress vanish,the fixed that is imposing an infinitesimal axial displacement and vanishing radialdisplacement on the top surface while restraining the axial and radial displacementsat the bottom, the slip imposing an infinitesimal axial displacement and a vanishingshear stress at the top surface, while the shear and axial stress vanish at the bottomsurface, and finally the no-edge assuming a preserved radius of the isolator during theprecompression. Not surprisingly the fixed and slip boundary conditions, constrainingmore the motion, result in an over-estimated low-frequency stiffness magnitude whilethe no-edge leads to a softer isolator, under-estimating the static stiffness magnitude.Clearly, the best prediction is attained with the free condition. Indeed, the proposed
106
107
Transfer stiffness − 25 mm isolator
Mag
nitu
de (
N/m
)
5 mm waveguide5 mm FEM 0 mm waveguide0 mm FEM
102
103
0
100
200
Pha
se (
degr
ees)
Frequency (Hz)
Figure 3.9: Transfer stiffness magnitude and phase versus frequency for H = 25 mmisolator at vanishing and maximum pre-compressions. Effective waveguide and non-linear finite element solution.
method results in an excellent agreement with the correct non-linear FE solution overthe whole examined frequency range of 20 to 2000 Hz at each considered preload,enabling, in addition, a study of higher order modes influence and dispersion aspectsin the propagating media while remaining relatively simple and physically intuitive inits development and implementation. Considering a cylindrical isolator of diameter
19

D = 100 mm and height H = 25mm, Figure 3.9 presents the results obtained withthe proposed waveguide approach, being compared to those computed with FE forpre-compressions of 0 and 5 mm. In Figure 3.10, the pre-compression dependence ofthe transfer stiffness magnitude and phase versus frequency is indicated.
106
107
Transfer stiffness − 25 mm isolator
Mag
nitu
de (
N/m
)
102
103
0
100
200
Pha
se (
degr
ees)
Frequency (Hz)
Figure 3.10: Transfer stiffness magnitude and phase versus frequency for H = 25 mmisolator at pre-compressions u0 = 0, 1, 2, 3, 4, 5mm. Direction for increased compres-sion is marked.
20

Chapter 4
Conclusions and future works
The main contributions proposed in the present work can be summarized as follows:
• The measurements of the audible axial dynamic transfer stiffness performedon three different types of engine mounts indicate a clearly superior isolatingbehavior of the rubber conical mounting compared with the steel coiled-springsystem and the combined steel-rubber mount. In addition to be a performantcomparison tool, the indirect measurement technique employed here also pro-vides an accurate estimate of the dynamic stiffness extremely useful to checkthe validity of analytical models.
• A simple audible-frequency stiffness model for a preloaded conical rubber iso-lator agrees very well with the measurement results performed in a speciallydesigned test rig. The complex mathematical difficulties mainly attributed tothe complicated geometrical shape of the isolator, the rubber structure-bornesound properties and the non-linearities introduced by the finite precompressionare successfully assigned by using a series of relevant approximations.
• An axial, dynamic stiffness model of an arbitrary long rubber bush mounting,being based on a waveguide approach, is developed within the audible frequencyrange. The rubber is assumed nearly incompressible, presenting dilatation elas-ticity and deviatoric viscoelasticity based on a fractional derivative, standardlinear solid embodying Mittag–Leffler relaxation kernel, thereby efficiently re-ducing the required number of material parameters. It is shown that only a fewnumber of higher order modes (N = 16) is needed to fulfill the radial boundaryconditions and yields a convergent solution.
• A novel, effective waveguide model for pre-compressed vibration isolators withinan audible frequency range is presented displaying excellent agreement with
21

the non-linear FE solution. The originally complex, mathematical problem issimplified by transforming the pre-compressed isolator into a globally equivalenthomogeneous and isotropic form, thereby enabling a waveguide model to beapplied, where the boundary conditions are satisfied by mode-matching.
The present study is believed to enlighten several new aspects of analytical mod-elling and experimental investigation of rubber vibration isolators. However, someinteresting extensions of the work are worth mention as:
¦ Enhancing the rubber layer element model in Paper B.
¦ Including temperature and dynamic amplitude dependence both experimentallyand analytically in the approach.
¦ Applying the waveguide modelling approach to other isolator’s geometries likehollow cylindrical or rectangular shapes.
¦ Implementing the proposed models to designs made of magneto-rheological rub-ber material finding more applications.
22

Bibliography
J. Adem. On the axially-symmetric steady wave propagation in elastic circular rods.Quarterly of Applied Mathematics, 12:261–75, 1954.
K. Adolfsson and M. Enelund. Fractional derivative viscoelasticity at large deforma-tions. Nonlinear Dynamics, 33:301–21, 2003.
R.L. Bagley and P.J. Torvik. Fractional calculus - A different approach to the analysisof viscoelastically damped structures. AIAA Journal, 21:741–8, 1983.
C. Chree. The equations of an isotropic elastic solid in polar and cylindrical coordi-nates, their solutions and applications. Transactions of the Cambridge PhilosophicalSociety, 14:250–69, 1889.
R.M. Christensen. Theory of Viscoelasticity, Second Edition. Academic Press, Berlin,Heidelberg, New York, 1982.
S.H. Crandall. The role of damping in vibration theory. Journal of Sound and Vibra-tion, 11(1):3–18, 1970.
L. Cremer, M. Heckl, and E.E. Ungar. Structure-Borne Sound, Second Edition.Springer-Verlag, Berlin, Heidelberg, New York, 1988.
K. Dovstam. Augmented Hooke’s law in frequency domain. A three dimensionalmaterial damping formulation. International Journal of Solids and Structures, 32:2835–52, 1995.
M. Enelund and G.A. Lesieutre. Time domain modeling of damping using anelasticdisplacement fields and fractional calculus. International Journal of Solids andStructures, 36(29):4447–72, 1999.
R.J. Gaylord, G.H. Weiss, and E.A. Dimarzio. Non-equilibrium mechanical responseof a cross-linked network. Macromolecules, 19:927–9, 1986.
A. Gemant. A method of analyzing experimental results obtained from elasto-viscousbodies. Physics, 7:311–7, 1936.
23

A.N. Gent. Engineering with rubber. Carl Hansen Verlag, Munich, 1992.
S. Invansson and I. Karasalo. Computation of modal wavenumbers using an adap-tive winding-number integral method with error control. Journal of Sound andVibration, 161:173–80, 1993.
L. Kari. Dynamic transfer stiffness measurements of vibration isolators in the audiblefrequency range. Noise Control Engineering Journal, 49(2):88–102, 2001.
L. Kari. Axially symmetric modes in finite cylinders - the wave guide solution. WaveMotion, 36(2):169–84, 2002.
L. Kari. On the dynamic stiffness of preloaded vibration isolators in the audiblefrequency range: Modeling and experiments. Journal of the Acoustical Society ofAmerica, 113(4):1909–21, 2003.
L. Kari, P. Eriksson, and B. Stenberg. Dynamic stiffness of natural rubber cylindersin the audible frequency range using wave guides. Kautschuk Gummi Kunststoffe,54 (3):106–13, 2001.
R.C. Koeller. Applications of fractional calculus to the theory of viscoelasticity. Jour-nal of Applied Mechanics, 51:299–307, 1984.
G.A. Lesieutre and E. Bianchini. Time domain modeling of linear viscoelasticity usinganelastic displacement fields. Journal of Vibration and Acoustics, 117(4):424–30,1995.
G.A. Lesieutre and D.L. Mingori. Finite-element modeling of frequency-dependentmaterial damping using augmenting thermodynamic fields. Journal of GuidanceControl and Dynamics, 13(6):1040–50, 1990.
P.B. Lindley. Engineering Design with Natural Rubber. The Malaysian Rubber Pro-ducers’ Research Association, Brickendonbury, 1992.
A. Lion and C. Kardelky. The Payne effect in finite viscoelasticity: constitutivemodelling based on fractional derivatives and intrinsic time scales. InternationalJournal of Plasticity, 20(7):1313–45, 2004.
D.J. McTavish and P.C. Hughes. Modeling of linear viscoelastic space structures.Journal of Vibration and Acoustics, 115:103–10, 1993.
J. Miklowitz. The theory of elastic waves and waveguides. North Holland, Amsterdam,New York, Oxford, 1984.
S. Nadeau and Y. Champoux. Application of the direct complex stiffness method toengine mounts. Experimental Techniques, 24(3):21–3, 2000.
24
P.G. Nutting. A new general law of deformation. Journal of the Franklin Institute,191:679–85, 1921.
K.B. Oldham and J. Spanier. The fractional calculus. Academic Press, New York andLondon, 1974.
A.R. Payne and R.E. Whittaker. Low strain dynamic properties of filled rubber.Rubber Chemistry and Technology, 44:440–78, 1971.
L. Pochhammer. Uber die Fortpflanzungsgeschwindigkeiten kleiner Schwingungen ineinem unbegrenzten isotropen Kreiszylinder. Journal fur die reine und angewandteMathematik, 81:324–36, 1876.
T. Pritz. Five-parameter fractional derivative model for polymeric damping materials.Journal of Sound and Vibration, 265(5):935–52, 2003.
D.S. Ramrakhyani, G.A. Lesieutre, and E.C. Smith. Modeling of elastomeric materialsusing nonlinear fractional derivative and continuously yielding friction elements.International Journal of solids and Structures, 41:3929–48, 2004.
A. Schmidt and L. Gaul. Finite element formulation of viscoelastic constitutive equa-tions using fractional time derivatives. Nonlinear Dynamics, 29:37–55, 2002.
J.C. Snowdon. Vibration isolation: Use and characterization. Journal of the Acous-tical Society of America, 66:1245–74, 1979.
D.J. Thompson, W.J. van Vliet, and J.W. Verheij. Developments of the indirectmethod for measuring the high frequency dynamic stiffness of resilient elements.Journal of Sound and Vibration, 213(1):169–88, 1998.
A.B. Zdunek. Determination of material response functions for prestrained rubbers.Rheologica Acta, 31:575–91, 1992.
25