
EcoController GEL 8110/8115 - ERTECH · 4 Lenord +Bauer DS21-8110(11.04) Allgemeines Sollwerte...
12
EcoController GEL 8110/8115 Positionierung/Kreisinterpolation Technische Information Stand 11.04 Internet: http://www.lenord.de Tel.: +49 (0)208 9963-0 Lenord, Bauer & Co. GmbH E-Mail: info@lenord.de Fax: +49 (0)208 676292 Dohlenstrasse 32 46145 Oberhausen, Germany
Transcript of EcoController GEL 8110/8115 - ERTECH · 4 Lenord +Bauer DS21-8110(11.04) Allgemeines Sollwerte...

EcoController GEL 8110/8115Positionierung/Kreisinterpolation
Technische Information Stand 11.04
Internet: http://www.lenord.de Tel.: +49 (0)208 9963-0 Lenord, Bauer & Co. GmbHE-Mail: [email protected] Fax: +49 (0)208 676292 Dohlenstrasse 32
46145 Oberhausen, Germany

DS21-8110(11.04)2 Lenord +Bauer
Konzept, Aufbau
KonzeptDer EcoController GEL 8110/15 ist sowohl für 1-Achs- alsauch für 2-Achsregelung konzipiert. Über den CAN-Buskönnen bis zu 6-Achsen angesteuert werden. Der Controllereignet sich zur Ansteuerung von sämtlichen AC-/DC-Motorenund vielen hydraulischen Antrieben. Mit ihm lassen sichsowohl einfache als auch komplexe Automatisie-rungsaufgaben wirtschaftlich und schnell lösen.Der EcoController ist für den Schaltschrankeinbau konzipiertund kann einzeln oder vernetzt betrieben werden. Kern derEcoController-Hardware ist ein schneller 16 Bit-Mikropro-zessor und ein für die Anforderungen in der Bewegungs-automatisierung speziell entwickeltes, sehr leistungsfähigesPeripherie-ASIC. Das Gehäuse ist aus Stahlblech (Zincor)gefertigt.
Ein-/AusgabenIn der Grundausführung verfügt der Controller über• digitale Eingänge (Klemmleiste G, J)• digitale Ausgänge (Klemmleiste H, K) und• kombinierte Ein-/Ausgänge (Klemmleiste F)Jeder Ausgang kann einen Strom von 300 mA treiben.Gruppen von jeweils 8 Ausgängen können gemeinsam undgleichzeitig einen Strom von 600 mA führen.Optional stehen weitere• 48 digitale Eingänge (Stecker E2, E3) und• 48 digitale Ausgänge (Stecker A2, A3)zur Verfügung.Sämtliche Digitalausgänge arbeiten mit industrieüblichen24 V-Pegeln. Alle Digital-Ein-/Ausgänge sind kurzschlussfestund verpolungssicher. Über 24 LEDs kann wahlweise derSchaltzustand von 24 Eingängen oder 24 Ausgängen dar-gestellt werden (programmierbar).
IstwerterfassungEs stehen verschiedene Gebereingänge zur Erfassung vonDrehzahl-, Weg- oder Winkel-Istwerten zur Verfügung• Bis zu zwei Zähleingänge für inkrementale Geber 5 V
oder 24 V• Bis zu zwei serielle SSI-Eingänge für absolute Geber
im Gray-Code (13 Bit/25 Bit)• CAN-Bus• und alle Kombinationen der o. g. Istwerterfassungen
KommunikationsschnittstellenMit Hilfe zweier parallel geschalteter, 9poliger D-Sub-miniaturstecker lassen sich die Controller einfachvernetzen. Verfügbar sind:• zwei RS 485 und eine RS 422/485
Kommunikationsschnittstellen unabhängigvoneinander (Stecker B1, B2)
• PROFIBUS-DP (Stecker P) in der Vorderansicht nichtdargestellt, im Abschnitt PROFIBUS-DP erläutert
• eine RS 232-Schnittstelle und der CAN-Bus (Stecker C)• InterBus-S (Stecker I)
F H K
N G J
L1
L2
E2 A2
E3 A3
Z1 Z2
C B2B1
Vorderansicht GEL 8110/15 vollbestückt
PROFIBUS-DP (Stecker P1 und P2)Der Controller kommuniziert als DP-SLAVE mit DP-Masternder Klassen 1 und 2 und stellt die Dienste zum zyklischenDatenaustausch (DataExchange), die Global_Control-Kommandos “Clear_Data”, “Freeze” und “Sync”, Read_Input,Read_Output sowie die Ansprechüberwachung (Watchdog)zur Verfügung. Die maximale Übertragungsrate beträgt 1,5MBaud.
InterBus-S (Stecker I1 und I2)Der Controller arbeitet als Fernbus-Teinehmer mit InterBus-S-Slave-Funktionalität zur Kommunikation mit einemBus-Master. Der InterBus-S kann alle parallelen, digitalenEin- und Ausgänge ersetzen. Prozessdaten können ebenfallsüber den Prozessdatenkanal gelesen und geschriebenwerden.Anstelle des Daten-Ein/Ausgabe-Moduls kann das ModulPROFIBUS-DP oder InterBus-S eingerüstet werden.

DS21-8110(11.04) Lenord +Bauer 3
ProgrammierungEin Controller-Programm besteht immer aus einem odermehreren Sätzen, die leicht geändert, dupliziert oder er-weitert werden können. Der Satzaufbau wird vom Anwenderselbst festgelegt und kann so den unterschiedlichstenErfordernissen angepasst werden. Die Eingabe der Sätzeerfolgt über das Bedienterminal GEL 8810.Noch komfortabler lassen sich die Sätze jedoch mit dem PC-Programm “Bedienen + Beobachten” BB 8100 editieren,speichern und in die Controller laden oder aus den Controllernauslesen. Selbstverständlich können die Controller überdieses Programm auch konfiguriert werden. Die Eingabe-masken des Sollwert-Editors BB 8100 passen sich dabeiautomatisch den gewählten Satzstrukturen an.Mit dem PC-Programm zum Bedienen + Beobachten kanndie Kommunikation sowohl mit einem einzeln betriebenenController wie auch mit einem komplexen Controllernetzabgewickelt werden. Eine automatische Backup-Funktionliest die Daten und Konfiguration aller im Netz verbundenenController aus und erzeugt selbsttätig die für die System-verwaltung nötigen Dateien. Die Möglichkeit der Speicherungauf Datenträger führt zu einer besseren Übersicht dervielfältigen Daten des Controllers. Ein flexibler Druckertreiberhilft bei der Dokumentation der Anlagendaten.
Systemvoraussetzung für das PC Programm BB 8100• PC ab 80386 (ab MS-DOS 3.30)• Diskettenlaufwerk 3,5" und Festplatte• RS 232 Schnittstelle
Bei Vernetzung der Controller wird PC-seitig eine RS 485-Schnittstelle benötigt, falls nicht vorhanden• V 24 / RS 485 Konverter GEL 89010 inkl. Netzteil• V 24 / RS 485 Konverter mit galvanischer Signal-
trennung GEL 89011 inkl. Netzteil Bedien-terminal GEL 8810
Programmierung, Bedienung
Weitere Informationen zum Bedienterminal GEL 8810liefert eine separate Technische Information.
0 . +/
1 2 3
4 5 6
7 8 9ESC
F1
F2
F3
<<
<
� � � � � � � � � � � � � � �
� � � � � � � � � � � �
� � � � � � � � � � � � � � � � �
� � � � � � � � � � � � � � � � � � � � �
Bedienterminal GEL 8810Das Bedienterminal GEL 8810, mit seinen Frontmaßen160 mm x 160 mm und den 18 mm x 18 mm großen Kurzhub-tasten, ist für ein controllernahes Bedienen und Beobachtenkonzipiert.Das leuchtstarke, kontrastreiche Display hat eine alpha-numerische LCD-Punktmatrix-Anzeige (4 x 20 Zeichen,8 mm Höhe) mit LED-Hintergrundbeleuchtung. Der selbst-erklärende Text der Anzeige führt den Anwender menü-orientiert durch die Programmierung der Funktionen undBetriebswerte. Es kann zwischen deutschem und englischemText gewählt werden. Hinzu kommen komfortable Editier-funktionen wie••••• Einfügen von Sätzen••••• Kopieren von Sätzen auch über Programmgrenzen hinweg••••• Löschen von Sätzen, Programmen, Einheiten und desgesamten Speichers••••• Blättern durch Speicherinhalte u.a.mBei den EcoControllern können Maschinenparameter undSollwertprogramme editiert oder Istwerte und Sollwertevisualisiert werden.Die Anwahl und Kommunikation mit bis zu 31 EcoControllernerfolgt über die Schnittstelle RS 485.
Slave(Controller 1)
Slave(Controller 2)
Slave(Controller 3)
Slave(Controller 4)
GEL 8810
DS21-8110(11.04)4 Lenord +Bauer
Allgemeines
SollwerteDurch die satzorientierte Programmierung lassen sichProgrammabläufe schnell und einfach eingeben. DemAnwender stehen zu diesem Zweck 6416 Sollwert-speicherplätze zur Verfügung, die auf 99 Programme mitmaximal 999 Sätzen je Programm aufgeteilt werden können.Ein Satz kann aus folgenden Sollwerten bestehen:
• Position/Länge• Stückzahl• Maschinenfunktionen• Geschwindigkeit• Autostartzeit
ProgrammablaufsteuerungFür eine flexiblere Programmgestaltung können vierBefehle anstelle von Positionswerten im Satz vorgegebenwerden:
• CALL Pr. - Unterprogrammaufruf• Jump Pr. - Programmverzweigung• JMP Satz - Satzverzweigung im Programm• IF E/A - Signalabhängige Verzweigung
AntriebsansteuerungDie Ansteuerung von geregelten Antrieben erfolgt über biszu zwei Analogausgänge mit einem Spannungsbereichvon 0 bis + 10 V und 0 bis ± 10 V und einer Auflösung von1,22 mV. Zusätzlich werden die Signale
• Vorwärts/Rückwärts• Reglersperre aufheben• Bremse lösen
ausgegeben. Für die Steuerung von z.B. polumschaltbaren
Motoren stehen 2 x 4 Bereichssignale zur Verfügung, mitfolgenden Steuerfunktionen:
• Schleichfahrt/Eilfahrt• Vorwärts/Rückwärts
Für die Steuerung unserer Servoumrichter bietet sich dieCAN-Bus-Schnittstelle an. Über den Bus werden alleRegelgrößen für bis zu 6 Achsen übertragen. DieVerdrahtung wird dadurch vereinfacht (Geber undAnalogausgänge entfallen).
Maschinenparameter (Auswahl)• Netzausfallsicherheit• Wahl der Gebereingänge (inkremental/absolut)• Multiplikatoren für Istwert, Anzeige und
Geschwindigkeitssollwert• Nullpunktanpassung für Winkelkodierer• Korrekturwert (z.B. für Sägeblattbreite)• Bezugs-/Kettenmaßsystem/2 Referenzmaße• Restwertverrechnung• Regelparameter (Geschwindigkeit,
Beschleunigungs-/Brems-/Ruckzeit)• Rundtischpositionierung• Paßwörter für Sollwerte und Maschinenparameter
Spezielle Funktionen• lineare Bahnregelung• Beliebiger Wechsel zwischen Bezugs-/und
Kettenmaß bei der Sollwerteingabe• Fließende Satzverarbeitung• Parkposition• Bereichssignale• Softwareendschalter• Schleppfehlerüberwachung
BK1
BK4BK3
BK2
A
M
W
DG
M MotorA ArbeitstischBK Bohrkopf
DGDrehgeberW Werkstück
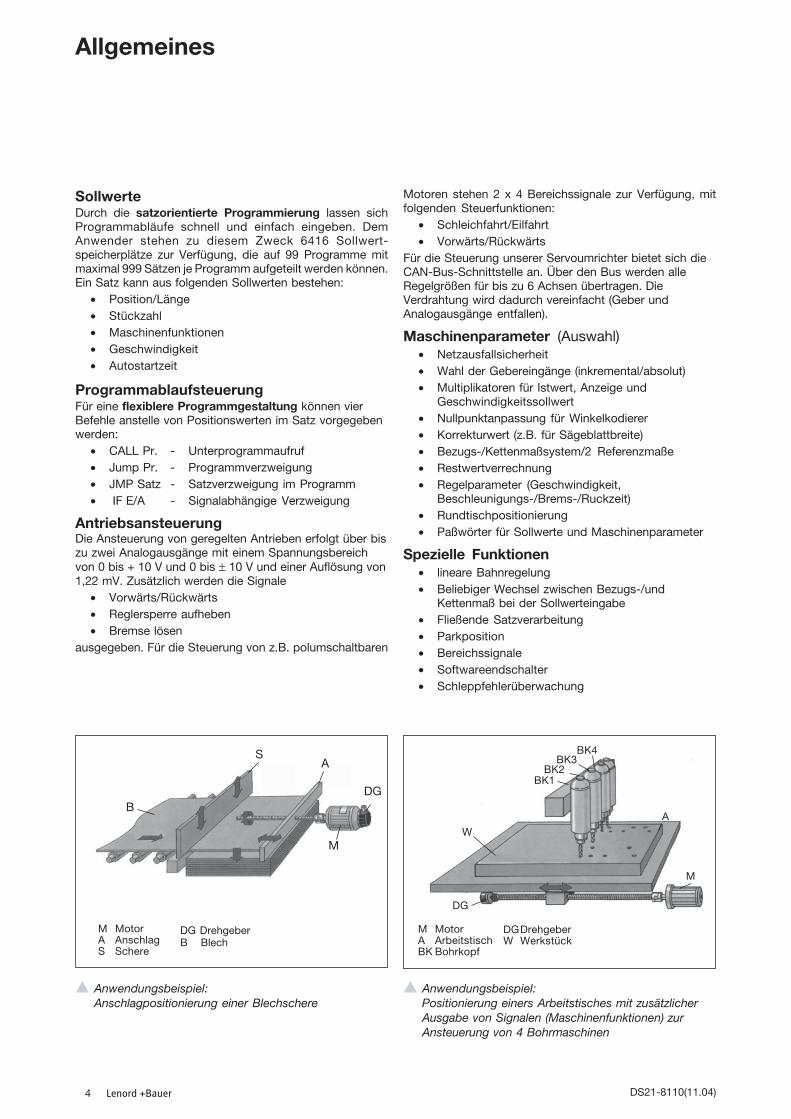
▲ Anwendungsbeispiel:Positionierung einers Arbeitstisches mit zusätzlicherAusgabe von Signalen (Maschinenfunktionen) zurAnsteuerung von 4 Bohrmaschinen
▲ Anwendungsbeispiel:Anschlagpositionierung einer Blechschere
DG DrehgeberB Blech
M MotorA AnschlagS Schere
B
SA
M
DG

DS21-8110(11.04) Lenord +Bauer 5
Allgemeines
▲ Anwendungsbeispiel: Bohrautomat
X
YDGX
DGY
GM
BK
BK BKBK
BK
GM
R
R RundtischBK BohrkopfvorschubspindelGM GleichstrommotorDGX Drehgeber X-AchseDGY Drehgeber Y-Achse
Ruckabhängige PositionierkurvenBeschleunigungs- und BremskurveDie Beschleunigungs- und Bremskurve des Antriebs wirdfür jede Achse über die vorzugebenden Parameter• Maximal- und Arbeitsgeschwindigkeit• Beschleunigen und Bremsen jeweils in Vorwärts-
und Rückwärtsrichtung• Ruck(zeit)gesondert festgelegt.Der Ruck ist die Größe, mit der sich die Beschleunigungändert, also ein Maß für die Steilheit der Beschleunigung undAbbremsung. Durch die Vorgabe dieser anlagenspezifischenWerte werden die Inbetriebnahme des Gerätes und dieOptimierung des Regelverhaltens wesentlich vereinfacht.Die Positioniercharakteristik für den Antrieb (z. B. Sanftanlauf)wird lediglich durch die geeignete Wahl des Ruckparametersbestimmt (siehe Diagramm "Ruckabhängige Positionierkur-ven").
▲ Legendev : Geschwindigkeitn : Drehzahlvmax : programmierte
Maximalgeschwindigkeits : WegSoll : in einem Satz
vorgegebene Sollpositiont : Zeit (s)AnzE : AnzeigeeinheitenKsp : Regelfaktor (Dynamik)
s
v
[AnzE] [AnzE/s]
v, n U[V]
[1/s]
Sollwert-Gene-rator
Istwert-Aufberei-
tung
nUKsp
s [DisU]
v, n [DisU/s]
Geschwindigkeit
PositionSoll
t1 t2
vmax
t
t3
: Beispiel 1 für Ruck1: Beispiel 2 für Ruck2: Beispiel 3 für Ruck3
Ruck1 > Ruck2 > Ruck3
Regelprinzip GEL 8110/8115Bei dem verwendeten Regelprinzip wird dem Antrieb zyklischein neuer, berechneter Positions-Sollwert vorgegeben unddie resultierende Soll/Ist-Differenz mit einem programmier-baren Faktor bewertet, der verantwortlich ist für die Regel-dynamik. Zur Minimierung des Schleppabstandes wirdzusätzlich ein berechneter Wert für die Geschwindigkeitaufaddiert (Drehzahlvorsteuerung). Damit erhält man einesehr effektive und individuell anpassbare Regelung für dieAntriebe.

DS21-8110(11.04)6 Lenord +Bauer
Technische Daten
egnägniEelatigiD )rekcetsrutainimbuS-D.lop-52,lanoitpo(
egnägniE 42x2
legeP V5+...0:woLV03+...51+:hgiH
dnatsrediwsgnagniE k01> �
egnägsuAelatigiD )rekcetsrutainimbuS-D.lop-52,lanoitpo(
egnägsuA 42x2
I xam ieb,gnagsuAorpAm0284ella:gnugrosreVrenretni
nemmasuzegnägsuAAm002
gnunnapssgnugrosreV U =B U.wzbV1- -B 4,1*redo)renretni(
-.xaM.sba(CDV03...8)renretxe(CDV53:treW
nelletsttinhcSelleireS 3
1reS ,C232SRredo584SRrebütnnerteghcsinavlag
relppokotpO
2reS 224SR
3reS hcsinavlag,584SRrelppokotpOrebütnnerteg
hciereblhäZ + 2 13
tieztsatbalegeR eshcAorpsm1.pyt
eztälprehciepstrewlloS 6146
ehcsitamilKessalksgnudnewnA
)04004NIDhcan(FWK
tiekgithcueftfuLevitaler gnuuateBeniek,%59sib
hcierebrutarepmetstiebrA C°05...C°0
rutarepmetregaL C°08+...C°02-
VME )netfirhcsrovuabfuAredgnuthcaeBretnu(
gnudnessuarötS 3-6-00016NEhcan
tiekgitsefrötS 2-6-00016NEhcan
egieznA
dradnatS nedoidthcueL2
iebrun(noitpO)egnägsuA/-niE-netaD
nedeid,nedoidthcueL42-niEreddnatsuztlahcS
egnägsuAredonereisilangisesuäheG
lairetaM )rocniZ(hcelblhatSzrawhcstreikcalrevlup
gnugitsefeB fuagnugitsefebppanhcSNENIDhcaneneihcstuHsehcafnieredo53-22005
nebuarhcsnA
traztuhcS 02PI
gnunnapssgnugrosreV
gnagniE redoCDV03...81CAV32...51
emhanfuamortS )tsaLenho(Am003.ac
gnagsuA U =B U.wzbV1- -B 4,1*
mortstsaL Am004.xam-revrebeG-V42.lhcsnie(
)gnugros
gnagnielhäZ
legepkigoL V42 V5+...0:woLV03+...51+:hgiH
V5 V8,0+...0:woLV5+...5,2+:hgiH
dnatsrediwsgnagniE V42 k01> �
V5 k8,0> �
k3,1:tkatnegeG( �)
zneuqerfsgnagniE < zHk002
slupmilluNetierbslupmI > sµ5,2
gnugrosrevrebeG V42 U.ac =B U.wzbV1- -B 4,1*mortsrebegtmaseG
Am004<
V5 V5 + matreisilibats%5hcrudgnurhüfkcüR(rebeGV5,6.xam;gnutieL-esneS
-tmaseG;)gnagsuAmamortsrebeg < Am006
(< )rebeG1rüfAm004
egnägniE-ISS
tkaT,netaD noitakifizepSßämeg224SR
zneuqerftkaT zHk573.xam
gnugrosrevrebeG U.ac =B U.wzbV1- -B 4,1*
egnägniekigoL )emmelK(
legeP V5+...0:woLV03+...51+:hgiH
dnatsrediwsgnagniE k01> �
egnägsuakigoL )emmelK(
I xam egnägsuA8,Am003,Am006nemmasuztsefssulhcszrukreuad
tsalrebÜfuatiezsnoitkaeR > sµ1
gnunnapssgnugrosreV CDV03...8nretxe)CDV53:treW-.xaM.sba(
egnägsuagolanA
hcierebsgnunnapS V01+...0...V01-
gnusölfuA Vm22,1)reldnaW-A/D-tiB-41(
I xam ,Am6tsefssulhcszrukreuad
relheftesffO.xaM + fuanegozebVm7,0C°32
-rutarepmeT-tesffOtneiziffeok
,K01/Vm02,0.pytK01/Vm00,1.xam

DS21-8110(11.04) Lenord +Bauer 7
F H K
N G J
L1
L2
E2 A2
E3 A3
Z1 Z2
C B2B1
Anschlussbelegungen
1
2
3
4
5
6
7
8
9
Buchsenteil
0°+ 5 / 24 V 1)
0° 2)
Sense90°Null 3)
90° 2)
Null 2)
0 V
1) Einstellung mittels DIP-Schalter (Spannungshöhe wie an N4, max. 26 V)2) wenn nicht verwendet, nicht belegen3) alternativ: Sensorsignal zum Referenzsetzen; bei unterschiedlichen Pegeln für Geber (5 V) und Sensor (24 V) eine Anpassung mittels DIP-Schalter durchführen
Ri � 3 k�
1
2
3
4
5
6
7
8
9
0 V1RxTx-RxTx+
Tx-Tx+Rx-Rx+
RxTx-RxTx+
➀ Ser 1: RS 485 mit galvanischer Trennung (PC etc.)
➁ Ser 2: RS 422/485 (Kaskadierung EcoController)
➂ Ser 3: RS 485 mit galvanischer Trennung (Bedienterminal GEL 8810)
1) Umschalten von RS 422 auf RS 485 mittels DIP-Schalter2) DIP-Schalter schließen bei Kaskadierung mehrerer EcoController
➀
➁
➂
Buchsenteil
1)
B1
1
B2
2)
0 V3
�
�
�
�
�
�
�
�
� � � � � � � � �
� � �� � �
� � � �� � �
� � � �� � �
� � � � � � � � � � � � � � � � � �
� � � � � � � � � � �
! " � � � � � �� � � �
� � � � � �
Stecker Z1, Z2(Zähleingang für einen inkrementalen Geber)
D281047Z
Stecker C(Serielle Schnittstelle RS 232 C und CAN-Bus)
Stecker B1, B2(Serielle Schnittstellen)
D281047BD281047C
1
2
3
4
5
6
7
8
9
Takt++5 / 24 V 1)
Takt-
Daten+
Daten-
0 V
1) Einstellung mittels DIP-Schalter (Spannungshöhe wie an N4, max. 26 V)
Stecker Z1, Z2(Istwerteingang für einen absoluten SSI-Geber)
D281047S

DS21-8110(11.04)8 Lenord +Bauer
Anschlussbelegungen
Stecker E2, E3(Dateneingabe)
D281047E
Stiftteil
(0 V) 23 1)
22
21
20
23
22
21
20
23
22
21
20
23
22
21
20
23
22
21
20
23
22
21
20
105
104
103
102
101
100
13
12
11
10
9
8
7
6
5
4
3
2
1
25
24
23
22
21
20
19
18
17
16
15
14
Sat
z
Sol
lwer
te
MAXMINMAXMIN
Fah
rsig
nale
Pro
gram
m
<<<>>>
Har
dwar
e-E
ndsc
halte
r
(x1)
Pro
gram
m (
x10)
1) Auf Anfrage auch positive Spannung möglich (wie Daten-Ausgabe A2/A3: extern oder intern U, siehe Klemmleiste N)
1)
vor.
rü
ck.
programmierbar
Wichtig!Der im Lieferumfangbefindliche Busabschluss-stecker GEL 89030 mußunbedingt auf den SteckerP aufgesetzt werden.
D281047P
5
4
3
2
1
9
8
7
6
GND
RxTx�RxTx+
+5 V
Buchsenteil
Stecker P(zwei PROFIBUS-Anschlüsse parallel miteinanderverbunden)
Stecker A2, A3(Datenausgabe)
D281047A
Buchsenteil
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
20
21
22
23
20
21
22
23
20
21
22
23
20
21
22
23
20
21
22
23
20
21
22
23 1)
(0 V) / +8...30 V
100
101
102
103
104
105
Sat
zP
rogr
amm
Mas
chin
enfu
nktio
nen
Sol
l-/Is
twer
te
M1
M24
M8
M1 B1
B4
SatzendeBlockendeProgrammendeStopp
Ber
eich
ssig
nale
Pro
gram
mab
lauf
sign
ale
programmierbar
Stiftteil(galvanisch getrennt)
GND1/DI1DI1/DO1DO1
1
2
3
4
5
6
7
8
9
5
4
3
2
1
9
8
7
6
� 1
Buchsenteil
DO2/DO2DI2/DI2GND
RBST+5 V
� 2
Stecker I(InterBus-S)
D281047I
� 1
� 2
� � � � � � � � � � � � � �

DS21-8110(11.04) Lenord +Bauer 9
1 ← tratS
2 ← ppotS/
3 ← gnulletskcüR
4 ← nehcusznerefeR
5 ← retlahcsedneW
6 ← borgznerefeR
7 ← 1/2znerefeR
8 ← nelluns_atleD
9 ← )*V0
1 → gnurötS/ )srevni(
2 →3 → sträwroV
4 → sträwkcüR
5 → nebehfuaerrepsrelgeR
6 → nesölesmerB
7 → thcierreznerefeR
8 → lloS=tsI
9 ← CDV03...8
J
9 )*V0
1 ← tratS
2 ← ppotS/ )srevni(
3 ← gnulletskcüR
4 ← nehcusznerefeR
5 ← retlahcsedneW
6 ← borgznerefeR
7 ← 1/2znerefeR
8 ← nelluns_atleD
9 )*V0
1 →2 →3 → sträwroV
4 → sträwkcüR
5 → nebehfuaerrepsrelgeR
6 → nesölesmerB
7 → thcierreznerefeR
8 → lloS=tsI
9 ← CDV03...8
G
9 )*V0
Klemmleiste K-Achse 1(Steuerausgänge)
*) externe Versorgung
Klemmleiste J-Achse 1(Steuereingänge)
Klemmleiste H-Achse 2(Steuerausgänge)
*) externe Versorgung
D281025J
Klemmleiste G-Achse 2(Steuereingänge)
*) externe Versorgung
1EebagnienetaD
1 � V0
2 � sträwroV niM
3 � sträwroV xaM
4 � sträwkcüR niM
5 � sträwkcüR xaM
6 � sträwroV niM
7 � sträwroV xaM
8 � sträwkcüR niM
9 � sträwkcüR xaM
01 � CDV03...8+
redo/dnu1AebagsuanetaD
1 � V0
2 � 1M 1B
3 � 2M 2B
4 � 3M 3B
5 � 4M 4B
6 � 5M 1B
7 � 6M 2B
8 � 7M 3B
9 � 8M 4B
01 � CDV03...8+
Klemmleiste F(Dateneingabe oder -ausgabe)
D281025H
D281X25K
D281025 F
Klemmleiste N(Spannungsversorgung)
D281025N
F H K
N G J
L1
L2
E2 A2
E3 A3
Z1 Z2
C B2B1
Anschlussbelegungen
*) externe Versorgung
D281X25G
1 � ~ gnugrosrevsgnunnapS
redoCAV32...51CDV03..81+
2 � ~ +/
3 � -
4 � +ruzgnagsuasgnunnapS
nrebeglangiSnovgnugrosreV�US Am004.xam,V1-
5 � -
6 � -
7 � )1eshcA(V0
gnagsuagolanA8 � )2eshcA(V0
9 � + )1eshcA(V01
01 � + )2eshcA(V01

DS21-8110(11.04)10 Lenord +Bauer
Maßbilder
74
184
90
79
172
5,5
140
41
8210
4
40
65
� � 80
166
EcoController GEL 81XXfür die Hutschienenmontage
EcoController GEL 81XXfür die Wandmontage
DS21-8110(11.04) Lenord +Bauer 11
Typenschlüssel GEL 81 XX
PC-Software Bedienen und Beobachten für - GEL 8110/15/30/35/40 auf Anfrage - GEL 8150 auf Anfrage - GEL 8180 auf Anfrage - GEL 8190 Programmiersystem für EcoSPS
für Windows 9x/NT PG 8032
ZubehörKonverter (V24/RS485) inkl. Netzteil GEL 89010Konverter (V24/RS485)mit galvanischer Signaltrennunginkl. Netzteil GEL 89011Kabel vom Konverter zum EcoController GEL 89015Kabel vom EcoController zum EcoController• Sender/Empfänger GEL 89016 SED• Empfänger/Empfänger GEL 89016 EEDKabel vom Bedienterminal GEL 8810 zumEcoController, 2,5 m GEL 89019Verbindungskabel RS 232C vom PCzum EcoController, 5 m GEL 89022D-Subminiatur-Adapter:• 25pol. Stecker auf 9pol. Buchse GEL 89025• 25pol. Stecker auf 25pol. Stecker GEL 89026• 9pol. Stecker auf 9pol. Stecker GEL 89027Busabschlussstecker (PROFIBUS) GEL 89030Klemmplatte für Netztransformator GEL 7922Netztransformator GEL 7923.2Netzfilter mit stromkompensiertenDrosseln, 250 V~ GEL 7925
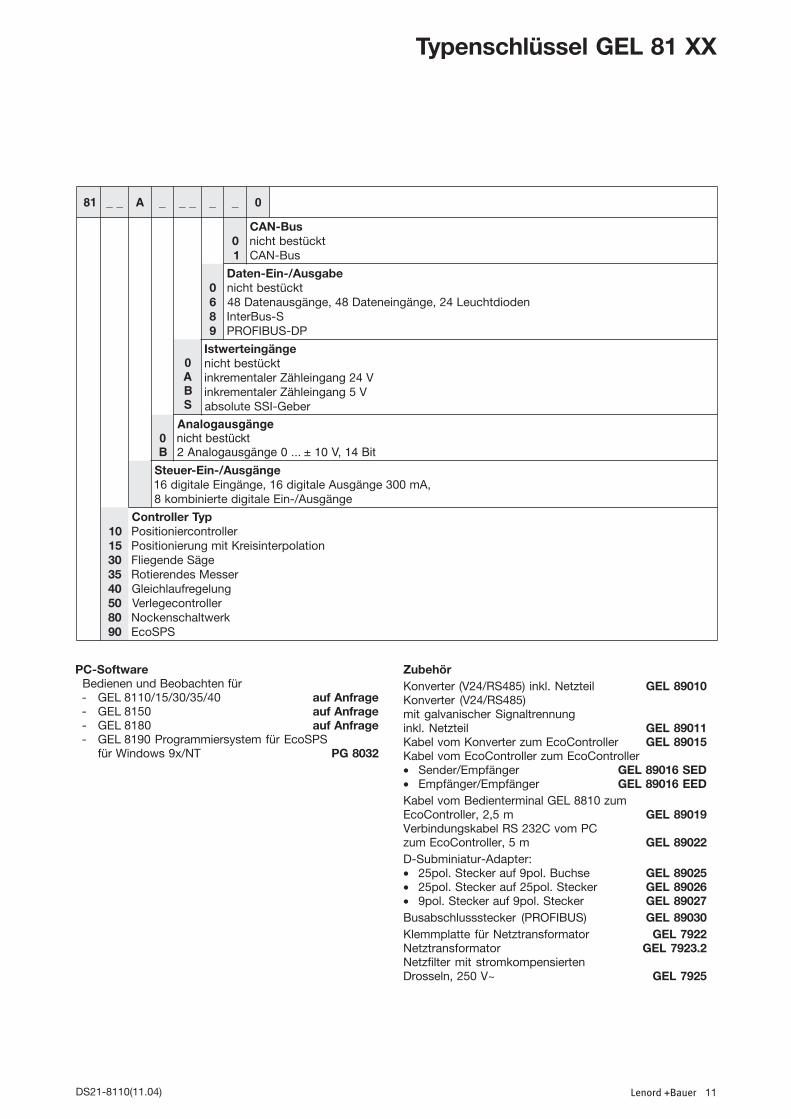
18 __ A _ __ _ _ 0
01
suB-NACtkcütsebthcin
suB-NAC
0689
ebagsuA/-niE-netaDtkcütsebthcin
nedoidthcueL42,egnägnienetaD84,egnägsuanetaD84S-suBretnI
PD-SUBIFORP
0ABS
egnägnietrewtsItkcütsebthcin
V42gnagnielhäZrelatnemerkniV5gnagnielhäZrelatnemerkni
rebeG-ISSetulosba
0B
egnägsuagolanAtkcütsebthcin
tiB41,V01±...0egnägsuagolanA2
egnägsuA/-niE-reuetS,Am003egnägsuAelatigid61,egnägniEelatigid61
egnägsuA/-niEelatigidetreinibmok8
0151035304050809
pyTrellortnoCrellortnocreinoitisoP
noitalopretnisierKtimgnureinoitisoPegäSednegeilF
resseMsednereitoRgnulegerfualhcielG
rellortnocegelreVkrewtlahcsnekcoN
SPSocE

DS21-8110(11.04)12 Lenord +Bauer
Bestellbeispiele
Beispiel 1:Positioniercontroller GEL 8110 A B S S 6 0 0
Positioniercontroller 811016 digitale Eingänge (G, J)16 digitale Ausgänge 300 mA (H, K)8 kombinierte digitale Ein-/Ausgänge (F) A
2 Analogausgänge 0 ... ± 10 V B
2 Istwerteingänge für absolute Gebermit SSI-Schnittstelle S S
48 Dateneingänge (E2/3)48 Datenausgänge (A2/3)24 Leuchtdioden 6
ohne CAN-Bus 0
Reserve 0
Beispiel 2:Gleichlaufregelung GEL 8140 A B A B 0 0 0
Gleichlaufregelung 814016 digitale Eingänge (G, J)16 digitale Ausgänge 300 mA (H, K)8 kombinierte digitale Ein-/Ausgänge (F) A2 Analogausgänge 0 ... ± 10 V B
inkrementaler Zähleingang mit 24 V und 5 V Pegel A B
ohne Daten-Ein-/Ausgabe 0
ohne CAN-Bus 0
Reserve 0
Technische Änderungen und Druckfehler vorbehalten.Die aktuellste Version finden Sie im Internet unter www.lenord.de.
Lenord, Bauer & Co. GmbHDohlenstrasse 3246145 Oberhausen, GermanyTel.: +49 (0)208 9963-0Fax: +49 (0)208 [email protected]


















