Ti:(Er+Yb)共ドープ LiNbO 薄膜を利用した波長変換素子の開 …...Ti:(Er+Yb)共ドープLiNbO 3薄膜を利用した波長変換素子の開発 中部大学 高橋誠

可変速機を用いた周波数変換装置の製作
E02001 青木 亮 指導教員 藤田吾郎
1. はじめに
近年,地球温暖化防止の対策として温室効果ガスの削
減が求められているが,二酸化炭素(CO2)を排出しない
新エネルギーの一つとして大規模導入可能な風力発電が
注目されている。現状として新エネルギーは2002年度実
績で日本の全エネルギー供給量のうち1.3%を占めてお
り,経済産業省は2010年を目標に3%程度に増大させる
ことを目指している。このうち風力発電は北海道や東北
地域で導入が現在進んでおり,我が国の導入実績は2004
年3月末現在で735基超,出力約67.7万kWとなっている。
しかし世界第一位のドイツにおける風力発電の導入実
績の約1,461万kW(2003年末時点)に比べると我が国の立
ち遅れは否めず,経済産業省は導入拡大を目指し2010年
までに5倍近い300万kWに増やす目標を立てている。
風力発電は発電出力が不安定であるため先に述べたよ
うな大規模導入に伴い電圧変動,周波数変動などの電力
品質の低下[1][2]を招く恐れがあるため,本研究では出力
安定化装置として可変速機を用いた回転型周波数変換装
置を提案し,装置の実機製作・測定・検証を行う。
2. 回転型周波数変換装置の概要・構成
2.1 実験装置の概要
本装置は,同期電動機(Synchronous Machine)にDFM機
を軸連結させた構造である。ウィンドファームからの発
電電力を同期電動機によって回転エネルギーに変換し,
軸連結したDFM機を回転させることによって電力に逆変
換する。ここで本研究においては可変速機の発電出力側
を1次側,励磁を行う入力側を2次側と定義する。このと
き,DFM機の二次側励磁,つまり二次巻線電圧を制御す
ることによって出力の安定化を図る。DFM機の二次側か
ら励磁周波数を変化させて交流励磁を行うことで,すべ
りを変化させることが可能となり,結果として出力電圧
と周波数の制御が可能となる。
2.2 可変速機(DFM機)
DFM機は同期可変速技術の発展で,巻線型誘導機と同
一構造であり,ローターの回転数と一次側回転磁界の速
度差をローター内の二次巻線回路で補う仕組みとなって
いるため,回転数によらず一定の周波数で電力の出し入
れが可能である。この二重に給電するということから二
重給電機(Doubly-Fed Machine)と呼ばれる。
DFM機を図1に示す。二次励磁をするためにDFM機の
固定子の二次側には炭素ブラシが取り付けてあり,回転
子にはスリップリングを通して励磁電流を流す構造とな
っている。DFM機は通常の三相誘導発電機を応用して製
作した。
図1 DFM機
2.3 三相交流アンプ
本研究では制御ソフトであるLabVIEWを用いることで
フィードバック制御を行っている。しかし,LabVIEWか
らの信号は微弱であるため三相交流アンプ(Three-phase
AC Amplifier)を用いて増幅する必要がある。昨年までは
電圧制御による二次励磁を行っていたが,今年は電流制
御に変更することとした。図2に提案した三相交流アン
プの回路図を示す。
まず,改良における昨年との大きな変更点はオペアン
プを追加することでフィードバックによる比較を行い制
御をすることである。信号入力を1[kΩ]と4[kΩ]で分圧
し,検出抵抗1[Ω]の電流と分圧した電流とをオペアンプ
を2つ用いて比較することで2[A]まで出力可能なように
設計を施した。また実際の回路においては抵抗値を,
R1=1[kΩ],R2=0.1[kΩ],R3=3.9[kΩ]とすることで分圧
比を実現している。これにより,5[V]の入力に対し1[A]
となり同様にして10[V]の入力に対し2[A]となるため
LabVIEWの入出力範囲は·10[V]であることより,2[A]
まで出力が可能である。
電流制御の方式に移行した理由としては周波数変動に
より回転子のインピーダンス成分が変動するため三相不
平衡の状態になり逆起電力を考えなければならず,結果
として三相交流アンプへの負担が大きくなり故障の原因
の一つとなるためである。また回路製作においては実験
における制御性の向上も考慮し,同時に妥当性の検討[3]
を行った。

INV:インバータ IM:誘導電動機
DHT:デジタルハイテスター
Elec
troly
tic c
apac
itor
1500
[μF]
35[
V]
1[kΩ
]
Cer
amic
cap
acito
r 104
0.1[μ
F] 5
0[V]
Lam
inat
ing
cera
mic
ca
paci
tor
390[
pF] 5
0[V]
220[
pF]
270[Ω
]
0.1[Ω
]
270[Ω
]
0.1[Ω
]
0.1[Ω
]0.
1[Ω
]
810
TS4B
05GC
eram
ic c
apac
itor 104
0.1[μ
F] 5
0[V]
Elec
troly
tic c
apac
itor
1500
[μF]
35[
V]
Brid
ge d
iode
0.1[kΩ
]
1[kΩ
]390[
pF]
R1
R2
R7
R9
R10 R11
R12
R14
R13
C2
C1
C3
C4
C5
C6
C7
図2 三相交流アンプ
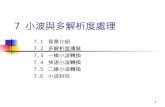
3. 励磁・発電電圧測定
DFM機の特性を調べるために励磁電圧に対する発電電
圧を測定する特性試験を行った。測定方法はインバータ
を用いて誘導機を回し,軸連結したDFM機を回転させて
2次側から励磁を行う。実験配線図を図3に示す。
また,各励磁電圧における発電電圧を測定し測定結果
をDFM機特性曲線・一次/二次電圧比率として図4に示す。
図3 DFM機特性試験
Result of No-load test
0
10
20
30
40
50
60
70
80
90
100
0 2 4 6 8 10
excitation voltage [V]
prim
ary
outp
ut vo
ltage
[V
]
0
1
2
3
4
5
6
7
8
9
10
prim
ary/
secon
dary
line voltage [V] primary/secondary
図4 DFM機特性曲線・一次/二次電圧比率
この測定より一次側と二次側の電圧比率を求め制御電
圧の検討を行った結果,7[V]から9[V]の間が制御に適正
な励磁電圧であると考えられる。
4. 今後の展望
三相交流アンプを改造したので改めてDFM機の特性を
詳細に調べたいと考えている。電圧比率としてではなく
特性試験において電流値に対する発電の精密な計測を行
いたい。またFFT解析による脈動トルクや振動のパワー
スペクトル分析,更には回転体部位の固有振動数測定に
よる検証も必要であると考えられる。
5.参考文献
[1] 小柳薫・小松貴彦・舟橋俊久・奈良秀隆・藤田吾
郎・柿木哲郎,「ウィンドファーム向け回転型系統
連系装置の検討」,平成12年電気学会電力・エネル
ギー部門大会論文集,No.241,(2000-8)
[2] 江崎公太・藤田吾郎・中野孝良・舟橋俊久・横山隆
一・小柳薫,「周波数品質改善を目的とした回転型
風力発電出力安定化装置の制御」,平成14年電気学
会電力・エネルギー部門大会論文集,No.505,
(2002-8)
[3] 矢野満明・菅 博・川畑敬志・田中 武・小寺正
敏・田中 誠,「電子デバイス ―物性からICまで
―」,産業図書,(2003)
OpenINV
DHT DHT
DFMIM
DC Power Supply