
Dynamic Simulation of Hybrid-driven Planar Five-bar ...
54
4 บทที่2 ทฤษฏีและหลักการ 2.1 สรุปสาระสาคัญจากเอกสารที่เกี่ยวข้อง 1. Dynamic Simulation of Hybrid-driven Planar Five-bar Parallel Mechanism Based on SimMechanics and Tracking Control [1] (1) บทคัดย่อ บทความนี ้เป็นการจาลองแบบทางพลศาสตร์ของแขนกลแบบขนาน 5 แกนโดยทาการจาลองแบบ ด้วยซอฟต์แวร์ Matlab และ sim mechanic โดยจะทาการจาลองการควบคุมแบบ PD และการควบคุมแบบ closed loop PD‐type iterative learning(ILC) ซึ ่งเป็นการประยุกต์การควบคุมแบบ PD ให้สามารถเรียนรู้การ ทางานและปรับปรุงการทางานของแขนกลแบบ HPPM ซึ ่งในขั ้นตอนสุดท ้ายของการจาลองแบบแขนกล จะได้ค่าความเร็วเชิงมุมและความเร่งเชิงมุมของชิ ้นต่อโยงต ้นกาลังทั ้งสองรวมถึงความสัมพันธ์ทาง จลนศาสตร์ ณ เวลาใดใดของชิ้นต่อโยงต่างๆ นอกจากนี ้ยังทาการเปรียบเทียบการควบคุมแบบ PD และการ ควบคุมแบบ ILC ผ่านการจาลองด้วยแขนกลแบบ HPPM เมื่อมี Disturbances โดยผลการจาลองแบบในครั ้ง นี ้เมื่อทาการติดตามการเดินทางของ link ต่างๆ แสดงให้เห็นว่าการควบคุมแบบ ILC นั ้นสามารถทางานได้ ดีกว่า (2) บทความนี้ทาอะไร งานวิจัยนี ้ได้ทาการจาลองแบบของแขนกลแบบห้าแกนซึ ่งจะใช้โปรแกรม Matlab และ SimMechanics ภาพที่ 2.1 five bar linkages [1]
Transcript of Dynamic Simulation of Hybrid-driven Planar Five-bar ...

4
บทท2
ทฤษฏและหลกการ
2.1 สรปสาระส าคญจากเอกสารทเกยวของ
1. Dynamic Simulation of Hybrid-driven Planar Five-bar Parallel Mechanism Based on SimMechanics and Tracking Control [1]
(1) บทคดยอ
บทความนเปนการจ าลองแบบทางพลศาสตรของแขนกลแบบขนาน 5 แกนโดยท าการจ าลองแบบ
ดวยซอฟตแวร Matlab และ sim mechanic โดยจะท าการจ าลองการควบคมแบบ PD และการควบคมแบบ
closed loop PD‐type iterative learning(ILC) ซงเปนการประยกตการควบคมแบบ PD ใหสามารถเรยนรการ
ท างานและปรบปรงการท างานของแขนกลแบบ HPPM ซงในขนตอนสดทายของการจ าลองแบบแขนกล
จะไดคาความเรวเชงมมและความเรงเชงมมของชนตอโยงตนก าลงท งสองรวมถงความสมพนธทาง
จลนศาสตร ณ เวลาใดใดของชนตอโยงตางๆ นอกจากนยงท าการเปรยบเทยบการควบคมแบบ PD และการ
ควบคมแบบ ILC ผานการจ าลองดวยแขนกลแบบ HPPM เมอม Disturbances โดยผลการจ าลองแบบในครง
นเมอท าการตดตามการเดนทางของ link ตางๆ แสดงใหเหนวาการควบคมแบบ ILC นนสามารถท างานได
ดกวา
(2) บทความนท าอะไร
งานวจยนไดท าการจ าลองแบบของแขนกลแบบหาแกนซงจะใชโปรแกรม Matlab และ
SimMechanics
ภาพท 2.1 five bar linkages [1]
5
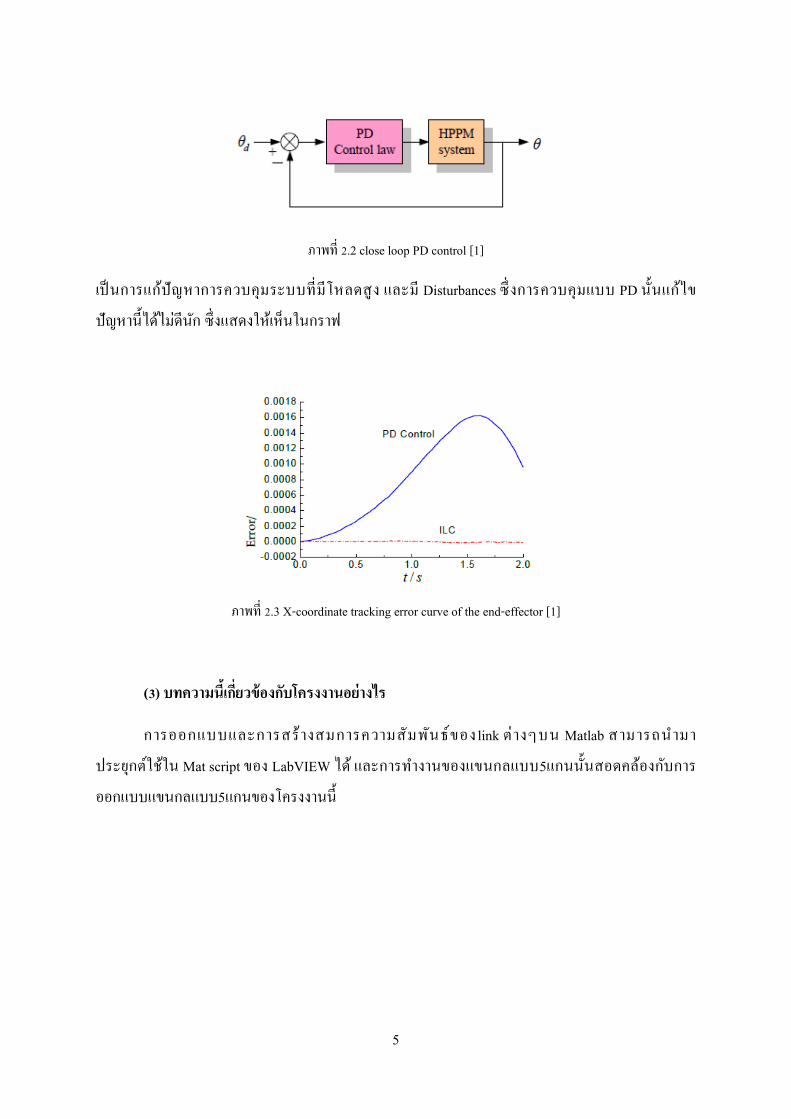
ภาพท 2.2 close loop PD control [1]
เปนการแกปญหาการควบคมระบบทมโหลดสง และม Disturbances ซงการควบคมแบบ PD นนแกไข
ปญหานไดไมดนก ซงแสดงใหเหนในกราฟ
ภาพท 2.3 X-coordinate tracking error curve of the end-effector [1]
(3) บทความนเกยวของกบโครงงานอยางไร
การออกแบบและการสรางสมการความสมพนธของ link ตางๆบน Matlab สามารถน ามา
ประยกตใชใน Mat script ของ LabVIEW ได และการท างานของแขนกลแบบ5แกนนนสอดคลองกบการ
ออกแบบแขนกลแบบ5แกนของโครงงานน

6
2. DEVELOPMENT OF A FIVE-BAR PARALLEL ROBOT WITH LARGE
WORKSPACE [3]
(1) บทคดยอ
Five-bar planar parallel robots ส าหรบกระบวนการจบวาง(pick and place operations)มกจะถก
ออกแบบใหเปนสภาวะเอกฐานของหนยนตนลดลงอยางมนยส าคญ ในหนยนตนความยาวของชนตอโยง
ใกลเคยงนนจะมความแตกตางจากความยาวของชนตอโยงทปลายแขน และ พนทท างานของหนยนตนนจะ
ถกจ ากดอยางมนยส าคญ ตงแตมการเกดชองวางตรงกลางอยในนน ในทางตรงกนขามเราเสนอการออกแบบ
เปนกลไก4ขอตอชนทม ชนตอโยงเทาๆกน ตามการออกแบบนจะน าเราไปส parallel singularities กลยทธ
การหลกเลยงโดยการสลบกระบวนการท างานทไดเสนอไป ผลคอ พนทท างานของหนยนตนไดเพมขน
อยางมนยส าคญ ความคดนไดถกด าเนนการเปนชนงานตนแบบดวยวสดระดบอสาหกรรม และไดมการระบ
รายละเอยดเพมขนในภายหลง
(2) บทความนท าอะไร
งานวจยนท าการแกไขปญหาพนทท างานของ Five-bar planar parallel robots ซงมกจะเกดชองวาง
ตรงกลางของพนทท างาน
ภาพท 2.4 workspace five bar planar parallel robots [3]
(3) บทความนเกยวของกบโครงงานอยางไร
การออกแบบและกระบวนการแกปญหาของงานวจยฉบบน สามารถน ามาประยคใชกบโครงงานน
ในการเพมพนทการท างาน เพอใหงานพนททมใหเกดประโยชนสงสด

7
ภาพท 2.5 Singularity-free zones accessible in the first assembly mode for each of the four working modes of
DexTAR, disregarding mechanical interferences. [3]

8
3. Design of a Parallel Robot for Needle Based Interventions on Small Animals
(1) บทคดยอ [2]
บทความน กลาวถง หนยนตทมระดบชนความเสรเทากบ5 ส าหรบ การน าเขมฉดใหกบสตวตว
เลกๆ ซงหวขอทจะศกษา คอ หนยนตสามารถ จดการกบต าแหนงของเขม โดยใชกลไกแบบขนาน 2ชด และ
ม กลไกชองกระบอกฉดยาเพอสอดเขมเขาไปในสตวทดลอง กระบวนการนถกใชกบสตวตวเลก ทตองการ
ความแมนย าของการใชเขม ขนตอนการเทยบจลนศาสตรของหนยนตนใชตวตดตามแบบ external sensor
เพอเพมความแมนย าของระบบ หลงจากการเทยบจลนศาสตรต าแหนงทถกตองของปลายเขมคอ 0.4mm
RMS. หนยนตถกออกแบบใหมน าหนกเบา และ ม motion bandwidth = 4Hz. หนยนตสามารถตดตามวถ
อางองไดดวย close loop controller
(2) บทความนท าอะไร
งานวจยนท าการออกแบบระบบการฉดยาใหแกสตวขนาดเลก โดยการประยคใชกลไกแบบขนาน 2
ชด เพอความสามารถในการเคลอนไหวของกลไกแบบขนาน
ภาพท 2.6 5-DOF Small Animal Drug Delivery/Biopsy Robot. Some of the base frame beams are not shown to reveal the
robot mechanisms. [2]
(3) บทความนเกยวของกบโครงงานอยางไร
การออกแบบกลไกแบบขนานในงานวจยนเพอเพมความหลากหลายใหแกระบบกลไกแบบขนาน
ซงสามารถน ามาประยกตใชกบโครงงานนได

9
ภาพท 2.7 Needle tip workspace of the 5-DOF robot in 3-D is shown. An ellipsoid with radii 150 mm, 110 mm, and 60 mm can be fitted into the workspace. [2]
ภาพท 2.8 Coordinate points on the syringe mechanism used in the derivation of forward and inverse kinematics of the robot. [2]

10
4. Humanity's open-source automated precision farming machine [5]
(1) บทคดยอ
FarmBot คอเครองท าฟารมทมความเทยงตรงแบบ open source และสามารถปรบขนาดไดโดย
อตโนมตและชดซอฟตแวรทออกแบบมาจากพนฐานของเทคโนโลยในปจจบน เชนเดยวกบเครองพมพ 3D
ในปจจบนและเครองกด CNC ฮารดแวร FarmBot มคมอเชงเสนในทศทาง X, Y และ Z เพอใหสามารถใช
เครองมอเชนเครองไถพรวนหวฉดน าเครองฉดน าและเซนเซอรไดอยางถกตองแมนย าและไดรบการ
ออกแบบมาอยางดจากการใชงานทมประสทธภาพและสามารถปรบเปลยนได การใชแพคเกจซอฟตแวรบน
เวบแบบ open source ท าใหผใชงานไดทราบถงการควบคมการเขารหสขอมลและเพมรหสการควบคมเชง
ตวเลขใหกบฮารดแวร คณสมบตอน ๆ ของซอฟตแวรรวมถงการจดเกบและจดการกบขอมลแผนทระบบ
สนบสนนการตดสนใจเพอใหงายตอการออกแบบฟารมขอมลการเขาถงทเกบขอมลแบบเปดและการ
วเคราะหระดบองคกร
(2) บทความนท าอะไร
งานวจยนท าการออกแบบหนยนตการเกษตร รวมไปถงระบบควบคมของหนยนต เพอใหหนยนต
สามารถท างานในการปลกพช ท าการรถน า รวมไปถงการดแลพชจนกวาพชจะเตบโต
รปท 2.9 ภาพรวมระบบของ FarmBot. [5]
(3) บทความนเกยวของกบโครงงานอยางไร
การออกแบบหนยนตเพอใชในการเกษตรของงานวจยน เปนการออกแบบหนยนตเพอท าหนาท
ปลกผก และ ดแลผก ซงตรงกบวตถประสงคของโครงงาน จงสามารถน ามาประยกตใชกบโครงงานนได
11
2.2 ทฤษฏและความเปนมาของหนยนต
หนยนตหรอโรบอต (robot) คอเครองจกรกลชนดหนง มลกษณะโครงสรางและรปรางแตกตางกน หนยนตในแตละประเภทจะมหนาทการท างานในดานตาง ๆ ตามการควบคมโดยตรงของมนษย การควบคมระบบตาง ๆ ในการสงงานระหวางหนยนตและมนษย สามารถท าไดโดยทางออมและอตโนมต โดยทวไปหนยนตถกสรางขนเพอส าหรบงานทมความยากล าบากเชน งานส ารวจในพนทบรเวณแคบหรองานส ารวจดวงจนทรดาวเคราะหท ไมมสงมชวต ปจจบนเทคโนโลยของหนยนตเจรญกาวหนาอยางรวดเรว เรมเขามามบทบาทกบชวตของมนษยในดานตาง ๆ เชน ดานอตสาหกรรมการผลต แตกตางจากเมอกอนทหนยนตมกถกน าไปใช ในงานอตสาหกรรมเปนสวนใหญ ปจจบนมการน าหนยนตมาใชงานมากขน เชน หนยนตทใชในทางการแพทย หนยนตสาหรบงานส ารวจ หนยนตทใชงานในอวกาศ หรอแมแตหนยนตทถกสรางขนเพอเปนเครองเลนของมนษย จนกระทงในปจจบนนไดมการพฒนาใหหนยนตนนมลกษณะทคลายมนษย เพอใหอาศยอยรวมกนกบมนษย ใหไดในชวตประจ าวน
ประวตของหนยนต
ในสมยกอนหนยนตเปนเพยงจนตนาการของมนษยทมความตองการไดสงใดสงหนงเขามา ชวยในการผอนแรงจากงานทท า หรอชวยในการปฏบตงานทยากล าบากเกนขอบเขตความสามารถ และจากจนตนาการไดกลายเปนแรงบนดาลใจใหมนษยคดประดษฐสรางสรรคหนยนตขนมาจน กลายเปนหนยนตหรอ Robot ในปจจบน
ค าวา Robot มาจากค าวา Robota ในภาษาเชก ซงแปลโดยตรงวา การท างานเสมอนทาส ถอก าเนดขนจากละครเวทเรอง "Rassum's Universal Robots" ในป ค.ศ. 1920 ซงเปนบทประพนธของ คาเรว ชาเปก (Karel Čapek) เนอหาของละครเวทมความเกยวพนกบจนตนาการของมนษยในการใฝหาสงใดมาชวยในการปฏบตงาน การประดษฐคดคนสรางหนยนตจงถอก าเนดขนเพอเปนเสมอนทาสคอยรบใชมนษย การใชชวตรวมกนระหวางหนยนตและมนษยด าเนนตอไปจนกระทงหนยนตเกดมความคดเชนเดยวกนมนษย การถกกดขขมเหงเชนทาสจากมนษยท าใหหนยนตเกดการตอตานไมยอมเปนเบยลางอก ซงละครเวทเรองนโดงดงมากจนท าใหค าวา Robot เปนทรจกทวโลก ในป ค.ศ. 1942 ค าวา robot ไดกลายเปนจดสนใจของคนทวโลกอกครง เมอ ไอแซค อส มอฟ นกเขยนนวนยายแนววทยาศาสตรไดเขยนเรองนวนยายสนเรอง Runaround ซงไดปรากฏค าวา robot ในนยายเรองน และตอมาไดน ามารวบรวมไวในนยายวทยาศาสตรเรอง I-Robot ท าให นกวทยาศาสตรไดท าความรจกกบค าวา Robot เปนครงแรกจากนวนยายเรองน หนยนตจงกลายเปนจดสนใจและเปนแนวคดและจนตนาการของนกวทยาศาสตร ในการคดคนและประดษฐหนยนตในอนาคต สมยโบราณการดเวลาจะใชนาฬกาแดดเปนเครองบงชเวลาแตสามารถใชไดเพยงแคเวลา กลางวนเทานน นาฬกาทรายจะใชบอกเวลาในเวลากลางคน จงไดมการคดคนและประดษฐเครอง จกรกลส าหรบ

12
บอกเวลาใหแกมนษยคอ นาฬกาน า (Clepsydra) โดย Ctesibiua of Alexandria นกฟสกสชาวกรกในป 250 กอนครสตกาล นาฬกาน านใชบอกเวลาแทนมนษยทแตเดมตองบอกเวลาจากนาฬกาแดดและนาฬกาทราย โดยใชพลงงานจากการไหลของน าเปนตวผลกท าใหกลไกของนาฬกาน าท างาน และถอเปนเครองจกรเครองแรกทมนษยสรางขนเพอใชส าหรบท างานแทนมนษย และเมอมนษยไดรจกและเรยนรเกยวกบไฟฟา ความคดสรางสรรคในการควบคมเครองจกรโดยไมตองใชกระแสไฟฟากเรมขน Nikola Tesia เปนบคลแรกทสามารถใชคลนวทยในการควบคมหนยนตเรอขนาดเลกในกรงนวยอรก ในป ค.ศ. 1898 ภายในงานแสดงผลงานทางดานไฟฟาป ค.ศ. 1940 - 1950 หนยนตชอ Alsie the Tortoise ไดถอก าเนดขนโดย Grey Walter หนยนตรปเตาสรางจากมอเตอรไฟฟาน ามาประกอบเปนเครองจกร สามารถเคลอนทไดดวยลอทง 3 ตอมาหนยนตชอ Shakey ไดถกสรางขนใหสามารถเคลอนทไดเชนเดยวกบ Alsie the Tortoise โดย Standford Research Institute:SRI แตมความสามารถเหนอกวาคอมความคดเปนของตนเองโดยท Shakey จะมสญญาณเซนเซอรเปนเครองบอกสญญาณในการเคลอนทไปมา ซงนอกเหนอจากหนยนตทสามารถเคลอนทไปมาดวยลอแลว ในป ค.ศ. 1960 หนยนตทชอ General Electric Walking Truck ทสามารถเดนไดดวยขากถอก าเนดขน มขนาดโครงสรางใหญโตและหนกถง 3,000 ปอนด สามารถกาวเดนไปดานหนาดวยขาทง 4 ขางดวยความเรว 4 ไมล/ชวโมงโดยการใชคอมพวเตอรในการควบคมการเคลอนไหวของขา General Electric Walk Truck ไดรบการพฒนาโครงสรางและศกยภาพโดยวศวกรประจ าบรษท General Electric ชอ Ralph Moser ภายหลงจากทหนยนตเรมเปนทรจกไปทวโลก หนยนตเรมเขามามบทบาทความส าคญในดานตาง ๆ เกยวของสมพนธกบชวตของมนษย โรงงานอตสาหกรรมเรมมความคดใชหนยนตแทนแรงงานมนษยเดม หนยนตดานอตสาหกรรมตวแรกทชอ Unimates ไดถอก าเนดขนในป ค.ศ. 1950 - 1960 โดย George Devol และ Joe Engleberger ซงตอมา Joe ไดแยกตวออกมาจากGeorge โดยเปดบรษทสรางหนยนตในชอของ Unimation ซงตอมาผลงานในดานหนยนตของ Joe ไดรบ สมญานามวา "บดาแหงหนยนตอตสาหกรรม"
ประเภทของหนยนตแบงตามลกษณะการใชงาน
1.หนยนตชนดทตดตงอยกบท (fixed robot) เปนหนยนตทไมสามารถเคลอนทไปไหนไดดวยตวเอง มลกษณะเปนแขนกล สามารถขยบและเคลอนไหวไดเฉพาะแตละขอตอ ภายในตวเองเทานน มกน าไปใชในโรงงานอตสาหกรรม เชนโรงงานประกอบรถยนต 11
2. หนยนตชนดทเคลอนทได (mobile robot) หนยนตประเภทนแตกตางจากหนยนตทตดตงอยกบท
เพราะสามารเคลอนทไปไหนมาไหนไดดวยตวเอง โดยการใชลอหรอการใชขาซงหนยนตประเภทนปจจบน
ยงเปนงานวจยททาการศกษาอยภายในหองทดลองเพอพฒนาออกมาใชงานในรปแบบตาง ๆ เชนหนยนต
ส ารวจดาวองคารขององคการนาซาปจจบนมการพฒนาหนยนตใหมลกษณะเปนสตวเลยงอยางสนข เพอให
13
มาเปนเพอนเลนกบมนษย เชน หนยนต AIBO ของบรษทโซน หรอแมกระทงมการพฒนาหนยนตให
สามารถเคลอนทแบบสองขาไดอยางมนษยเพออนาคตจะสามารถน าไปใชในงานทมความเสยงตออนตราย
แทนมนษย ในประเทศไทย สถานศกษาในระดบอดมศกษาหลายแหงหรอองคกรของภาครฐ และเอกชนได
เลงเหนถงประโยชนของเทคโนโลยหนยนต และรวมเปนแรงผลกดนใหเยาวชนในชาตพฒนาองคความร
เพอใหกาวทนเทคโนโลยของประเทศทพฒนาแลวโดยการจดใหมการแขงขนหนยนตขนในประเทศไทย
หลายรายการ เพอให นกศกษาไดสามารถน าความรทเรยนมาประยกตใชงานไดเปนการเสรมสรางและ
พฒนาทกษะเพอน าความรไปพฒนาประเทศในอนาคต
แขนหนยนตโครงสรางขนาน (parallel link manipulator)
เปนแขนกลชนดหนงทมตนก าลงในการขบเคลอนอยหลายจดบรเวณฐานโดยอาศยการสงตอก าลงไป
กบชนตอโยง(Bar Linkage)เพอใชในการควบคมต าแหนงและทศทางโดยการท างานในลกษณะนจะตอง
อาศยการค านวณจากความสมพนธทางคณตศาสตรของแตละขอตอซงในการควบคมจรงจ าเปนตองใช
อปกณประมวลผลประสทธภาพสงเพอใหการค านวณและการควบคมแขนกลชนดน
ในการสรางแขนกลแบบขนานจ าเปนตองค านงถงระดบชนความเสร(Degree of freedom) ซงใชในการ
ก าหนดจ านวนของตนก าลงทใชกบแขนกลซงสามารถค านวณไดจากสมการ
m=F=L+1 (1)
เมอ m คอ จ านวนของตนก าลง
F คอ ระดบชนความเสร (Degree of freedom)
L คอ จ านวนของลป
หากคดตามขอตอและจ านวนแขนจ านวนของขอตอและจ านวนแขนจะถกก าหนดโดยสมการ
∑ 𝑐𝑘 =𝑚𝑘=1 ∑ 𝑓𝑖
𝑗𝑖=1 (2)
เมอ j คอ จ านวนขอตอ

14
1 การวเคราะหต าแหนงของชนสวนในแขนกลแบบขนาน
ในการค านวณหาความสมพนธทางคณตศาสตรของแขนกลแบบขนานวธหนงทใชคอการหา
ความสมพนธทางเวกเตอร
รปท 2.10 แผนภาพแสดงขอตอและมมตางๆของแขนกลแบบ 3RRR
ทมา: Robot Analysis: The Mechanics of Serial and Parallel Manipulators. Lung-Wen Tsai, Page 125
จากรปท 2.2.1 สามารถเขยนเวกเตอรใหอยในรปสมการไดเปน
𝑂𝐴 = 𝑂𝑃 + 𝑃𝐷 + 𝐷𝐴 (3)
ความสมพนธของเวกเตอรเมอเทยบตามแนวแกนสามารถเขยนสมการไดเปน
𝑥𝐴 = 𝑥𝑝 + 𝑎1𝑐𝜃1 + 𝑏1𝑐(𝜃1 + 𝜓1) (4)
𝑦𝐴 = 𝑦𝑝 + 𝑎1𝑠𝜃1 + 𝑏1𝑠(𝜃1 + 𝜓1) (5)
เมอจด P คอจดก าเนด และ 𝑥𝑝 = 𝑦𝑝 = 0 และ𝜓1คอมมของแขนเมอเทยบกบระนาบ สามารถรวม
สมการท 4 และ 5 ไดเปน
𝑥𝐴2 + 𝑦𝐴
2 − 2𝑥𝐴𝑎1𝑐𝜃1 − 2𝑦𝑎1𝑠𝜃1 + 𝑎12 − 𝑏1
2 = 0 (6)
2. จลนศาสตรแบบผกผน (Invers Kinematics)
ในการค านวณมมองศาตางๆ ของแขนหนยนตจ าเปนตองอาศยการวเคราะหผลลพธของสมการทาง
คณตศาสตรซงใชในการหามมองศาของแขนกลหรอตนก าลงเพอใชในการควบคมต าแหนงของแขนกลให

15
เปนไปตามตองการส าหรบการหา Invers Kinematics ของแขนกลแบบขนานนนจะสามารถค านวณใน
ลกษณะคลายกบการน าแขนกลแบบอนกรมมาตอกนซงจากสมการท 6 สามรถเปลยนรปสมการไดเปน
𝑒1𝑠𝜃1 + 𝑒2𝑐𝜃1 + 𝑒3 = 0 (7)
เมอ 𝑒1 = −2𝑦𝐴𝑎1
𝑒2 = −2𝑥𝐴𝑎1
𝑒3 = 𝑥𝐴2 + 𝑦𝐴
2 + 𝑎12 − 𝑏1
2
จากความสมพนธทางตรโกณมต
𝑠𝜃1 = 2𝑡𝑖
1+𝑡𝑖2 และ 𝑐𝜃1 =
1−𝑡𝑖2
1+𝑡𝑖2 เมอ 𝑡𝑖 = 𝑡𝑎𝑛
𝜃𝑖
2
แทนคาในสมการท 2.2.5 จะไดวา
(𝑒3 − 𝑒2)𝑡12 + 2𝑒1𝑡1 + (𝑒3 + 𝑒2) = 0 (8)
แกสมการไดเปน
𝜃1 = 2𝑡𝑎𝑛−1−𝑒1±√𝑒1
2+𝑒22−𝑒3
2
𝑒3−𝑒2 (9)
จะสงเกตไดวาค าตอบของสมการนสามรถมไดหลายคาเนองจาก คาของ 𝑡𝑎𝑛−1จะมคาเทากนอย
หนงคาในแตละ (Quadrant) รวมไปถงอาจมบางค าตอบอาจออกมาในรปแบบของจ านวนจนตภาพเมอคาใน
รากทสองมคาตดลบซงท าใหตองมการคดเลอกคาทจะใชจรงเพอน าไปสงการตนก าลงใหไปตามทก าหนด
เพอใหไดมมองศาทเหมาะสมส าหรบการท างาน ดงนนในการเขยนโปรแกรมเพอใชในการควบคมแขนกล
แบบขนานนจ าเปนตองมการสรางฟงกชนเพอตรวจสอบคาผลลพธทางInvers Kinematics.
16
2.3 Programmable Logic Controller เครองควบคมเชงตรรกะทสามารถโปรแกรมได
PLC : Programmable Logic Controller (มตนก าเนดมาจากประเทศสหรฐอเมรกา) เปนเครอง
ควบคมอตโนมตทสามารถโปรแกรมได PLC ถกสรางและพฒนาแทนวงจรรเลยอนเนองมาจากความ
ตองการทอยากไดเครองควบคมทมราคาถก สามารถใชงานไดอยางอเนกประสงคและสามารถเรยนรการใช
งานไดงาย
ขอแตกตางระหวาง PLC กบ COMPUTER
1. PLC ถกออกแบบ และสรางขนเพอใหทนตอสภาพแวดลอมในโรงงานอตสาหกรรมโดยเฉพาะ
2. การโปรแกรมและการใชงาน PLC ท าไดงายไมยงยากเหมอนคอมพวเตอรทวไป PLC มระบบตรวจสอบ
ตวเองตงแตชวงการตดตงจนถงชวงการใชงาน ท าใหการบ ารงรกษาท าไดงาย
3. PLC ถกพฒนาใหมความสามารถการตดสนใจสงขนเรอยๆ ท าใหการใชงานสะดวก ขณะทวธใช
คอมพวเตอรยงยากและซบซอนขน
ประวต PLC
เมอป พ.ศ. 2511 ในฝาย Hydromatic ของบรษท General Motors ประเทศสหรฐอเมรกา ไดคดคน
อปกรณควบคมแบบใหมเพอใชทดแทนวงจรไฟฟาแบบเดมทใชกนอยในโรงงานอตสาหกรรมของบรษท
และในป พ.ศ. 2512 PLC ไดถกผลตขนจ าหนายในประเทศสหรฐอเมรกาเปนแหงแรก สวนในประเทศญปน
PLC ไดถกพฒนาขนภายหลงจากทบรษท ออมรอน (OMRON Co.,Ltd) ประเทศญปนประสบความส าเรจ
ในการผลตโซลต-สเตทรเลย (Solid State Relay) ในป พ.ศ.2508 หลงจากนน 5 ป PLC กถกน าออกจ าหนาย
สทองตลาดจนเปนทแพรหลายในเวลาตอมา
PLC ของแตละบรษทจะมชอเรยกแตกตางกนในแตละประเทศดงน
- ในประเทศองกฤษ เรยกวา PC หรอ Programmable Controller
- ในประเทศกลมสแกนดเนเวย เรยกวา PBS หรอ Programmable Binary System
- ในประเทศสหรฐอเมรกา เรยกวา PLC หรอ Programmable Logic Controller
17
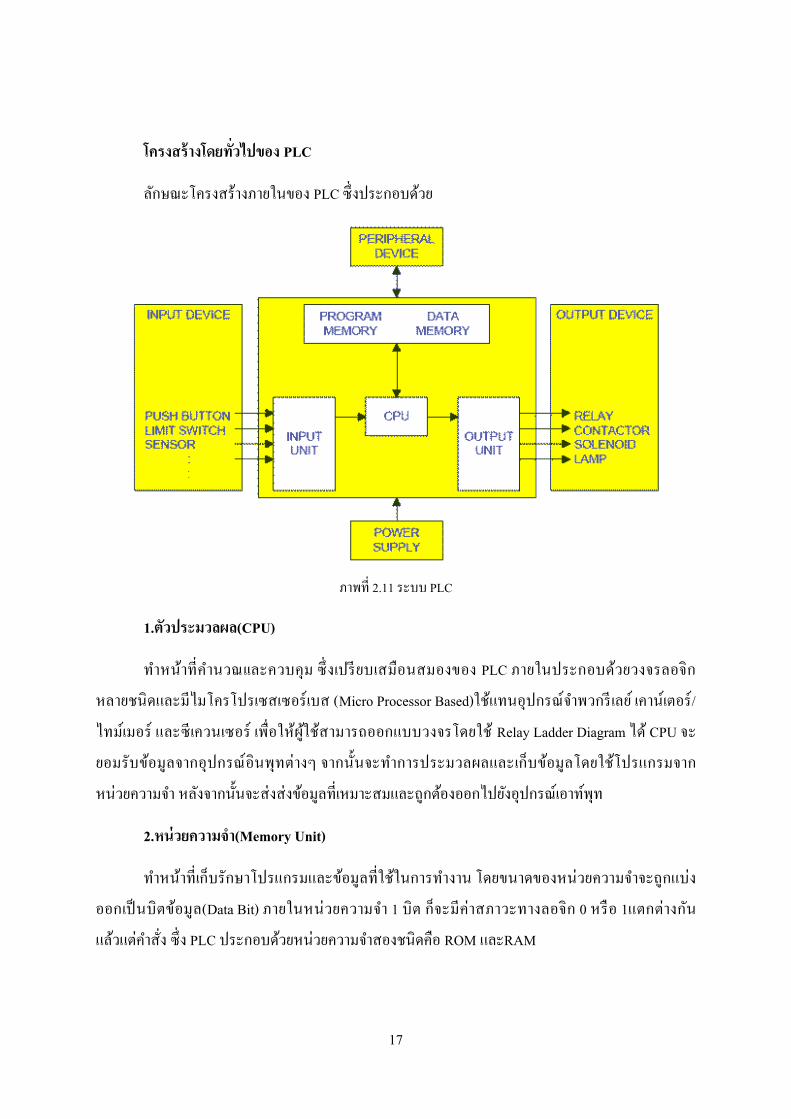
โครงสรางโดยทวไปของ PLC
ลกษณะโครงสรางภายในของ PLC ซงประกอบดวย
ภาพท 2.11 ระบบ PLC
1.ตวประมวลผล(CPU)
ท าหนาทค านวณเเละควบคม ซงเปรยบเสมอนสมองของ PLC ภายในประกอบดวยวงจรลอจก
หลายชนดและมไมโครโปรเซสเซอรเบส (Micro Processor Based)ใชแทนอปกรณจ าพวกรเลย เคานเตอร/
ไทมเมอร และซเควนเซอร เพอใหผใชสามารถออกแบบวงจรโดยใช Relay Ladder Diagram ได CPU จะ
ยอมรบขอมลจากอปกรณอนพทตางๆ จากนนจะท าการประมวลผลและเกบขอมลโดยใชโปรแกรมจาก
หนวยความจ า หลงจากนนจะสงสงขอมลทเหมาะสมและถกตองออกไปยงอปกรณเอาทพท
2.หนวยความจ า(Memory Unit)
ท าหนาทเกบรกษาโปรแกรมและขอมลทใชในการท างาน โดยขนาดของหนวยความจ าจะถกแบง
ออกเปนบตขอมล(Data Bit) ภายในหนวยความจ า 1 บต กจะมคาสภาวะทางลอจก 0 หรอ 1แตกตางกน
แลวแตค าสง ซง PLC ประกอบดวยหนวยความจ าสองชนดคอ ROM และRAM

18
RAM ท าหนาทเกบโปรแกรมของผใชและขอมลทใชในการปฏบตงานของ PLC หนวยความจ า
ประเภทนจะมแบตเตอรเลกๆ ตอไวเพอใชเปนไฟเลยงขอมลเมอเกดไฟดบ การอานและการเขยนขอมลลง
ใน RAM ท าไดงายมาก เพราะฉะนนจงเหมาะกบงานในระยะทดลองเครองทมการเปลยนแปลงแกไข
โปรแกรมอยบอยๆ
ROM ท าหนาทเกบโปรแกรมส าหรบใชในการปฏบตงานของ PLC ตามโปรแกรมของผ ใช
หนวยความจ าแบบ ROM ยงสามารถแบงไดเปน EPROM ซงจะตองใชอปกรณพเศษในการเขยนและลบ
โปรแกรม เหมาะกบงานทไมตองการเปลยนแปลงโปรแกรม นอกจากนยงมแบบ EEPROM หนวยความจ า
ประเภทนไมตองใชเครองมอพเศษในการเขยนและลบโปรแกรม สามารถใชงานไดเหมอนกบ RAM แตไม
ตองใชแบตเตอรส ารอง แตราคาจะแพงกวาเนองจากรวมคณสมบตของ ROM และ RAM ไวดวยกน
3.หนวยอนพต-เอาตพต (Input-Output Unit)
หนวยอนพต ท าหนาทรบสญญาณจากอปกรณภายนอกแลวแปลงสญญาณใหเปนสญญาณท
เหมาะสมแลวสงใหหนวยประมวลผลตอไป
ภาพท 2.12 เซนเซอร
19
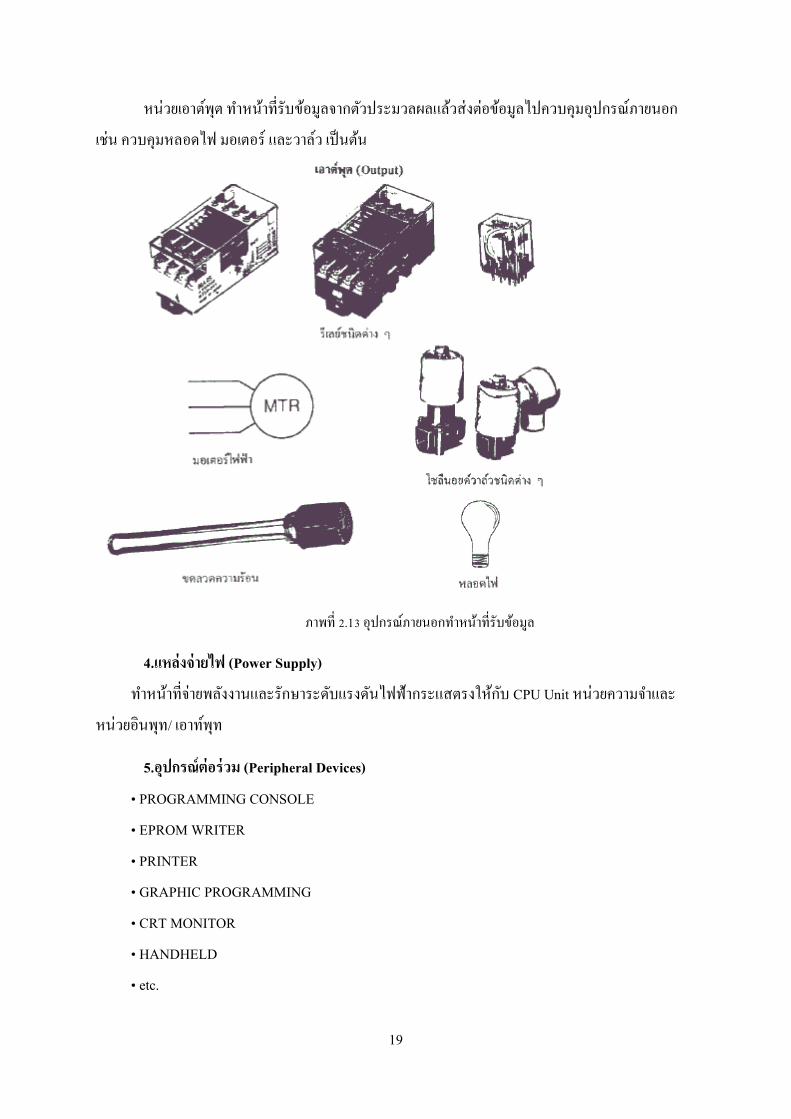
หนวยเอาตพต ท าหนาทรบขอมลจากตวประมวลผลแลวสงตอขอมลไปควบคมอปกรณภายนอก
เชน ควบคมหลอดไฟ มอเตอร และวาลว เปนตน
ภาพท 2.13 อปกรณภายนอกท าหนาทรบขอมล
4.แหลงจายไฟ (Power Supply)
ท าหนาทจายพลงงานและรกษาระดบแรงดนไฟฟากระแสตรงใหกบ CPU Unit หนวยความจ าและ
หนวยอนพท/ เอาทพท
5.อปกรณตอรวม (Peripheral Devices)
• PROGRAMMING CONSOLE
• EPROM WRITER
• PRINTER
• GRAPHIC PROGRAMMING
• CRT MONITOR
• HANDHELD
• etc.

20
ภาษาทใชในการเขยนโปรแกรมใหกบ PLC
การเขยนโปรแกรมเพอสงให PLC ท างานตามความตองการนนตามมาตรฐาน IEC1131-3 ไดแบง\
ออกเปน 5 แบบ คอ
1. Ladder Diagram Language
ภาพท 2.14 Ladder Diagram Language
2. Sequential Flow Chart Language
ภาพท 2.15 Sequential Flow Chart Language

21
3. Function Block Diagram Language
ภาพท 2.16 Function Block Diagram Language
4. Instruction List Language (Statement List Language)
ภาพท 2.17 Instruction List Language (Statement List Language)
5. Structure Text Language
ภาพท 2.18 Structure Text Language
22
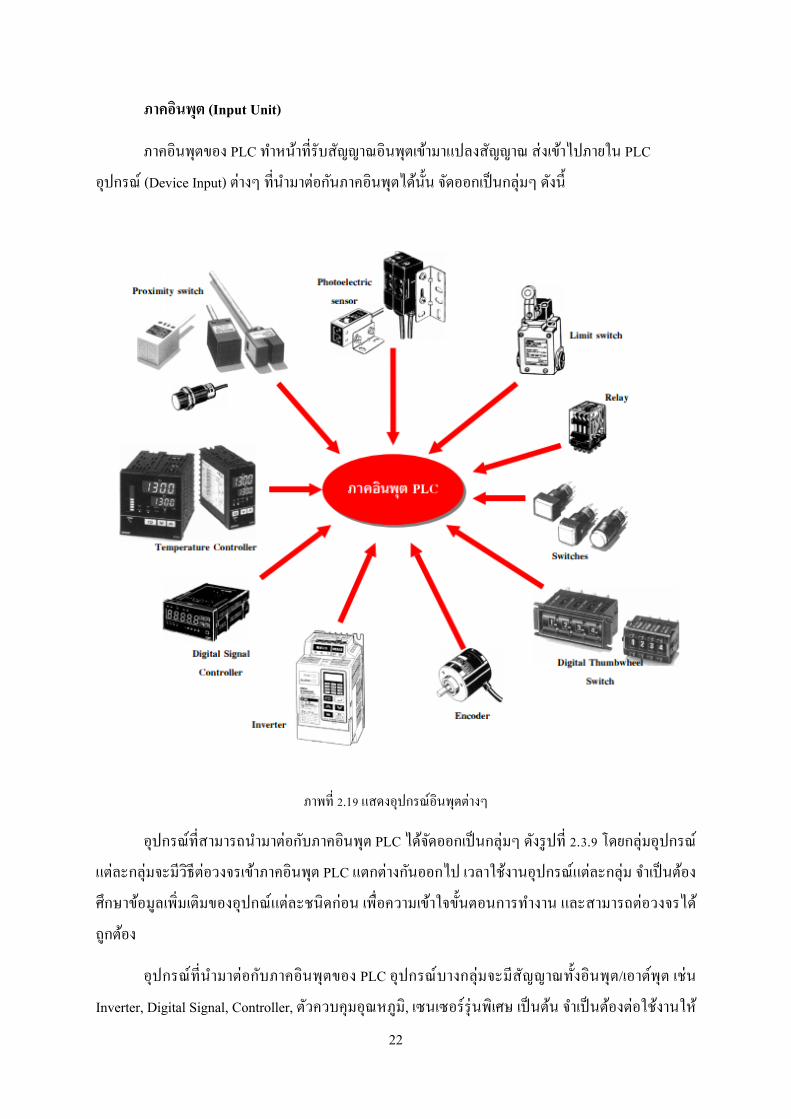
ภาคอนพต (Input Unit)
ภาคอนพตของ PLC ท าหนาทรบสญญาณอนพตเขามาแปลงสญญาณ สงเขาไปภายใน PLC
อปกรณ (Device Input) ตางๆ ทน ามาตอกนภาคอนพตไดนน จดออกเปนกลมๆ ดงน
ภาพท 2.19 แสดงอปกรณอนพตตางๆ
อปกรณทสามารถน ามาตอกบภาคอนพต PLC ไดจดออกเปนกลมๆ ดงรปท 2.3.9 โดยกลมอปกรณ
แตละกลมจะมวธตอวงจรเขาภาคอนพต PLC แตกตางกนออกไป เวลาใชงานอปกรณแตละกลม จ าเปนตอง
ศกษาขอมลเพมเตมของอปกณแตละชนดกอน เพอความเขาใจขนตอนการท างาน และสามารถตอวงจรได
ถกตอง
อปกรณทน ามาตอกบภาคอนพตของ PLC อปกรณบางกลมจะมสญญาณทงอนพต/เอาตพต เชน
Inverter, Digital Signal, Controller, ตวควบคมอณหภม, เซนเซอรรนพเศษ เปนตน จ าเปนตองตอใชงานให

23
ถกตอง ซงสามารถแนะน าไดในขนตนคอ ตอวงจรภาคเอาตพตของอปกรณนนๆ เขากบภาคอนพตของ
PLC
ภาคเอาตพตของอปกรณจะมเอาตพตใหเลอกใชงานหลายแบบ ซงภาคอนพต PLC มวงจรภาค
อนพตอยหลายแบบเชนกน เพอรองรบอปกรณอนพตในแตละแบบใหเหมาะสม
1 วงจรภาคอนพต ( Input Circuit PLC )
วงจรภาคอนพตแบงออกเปน 2 ประเภทใหญๆคอ
1) ดจตอลอนพต (Digital Input)
หมายถง อนพตทรบรสญญาณไดเพยงแค “ON” หรอ “OFF” เทานน
2) อนาลอกอนพต (Analog Input)
อนาลอกอนพตจดเปนอนพตทสามารถรบสญญาณท บอกเปนปรมาณท
เปลยนแปลงคาได
24
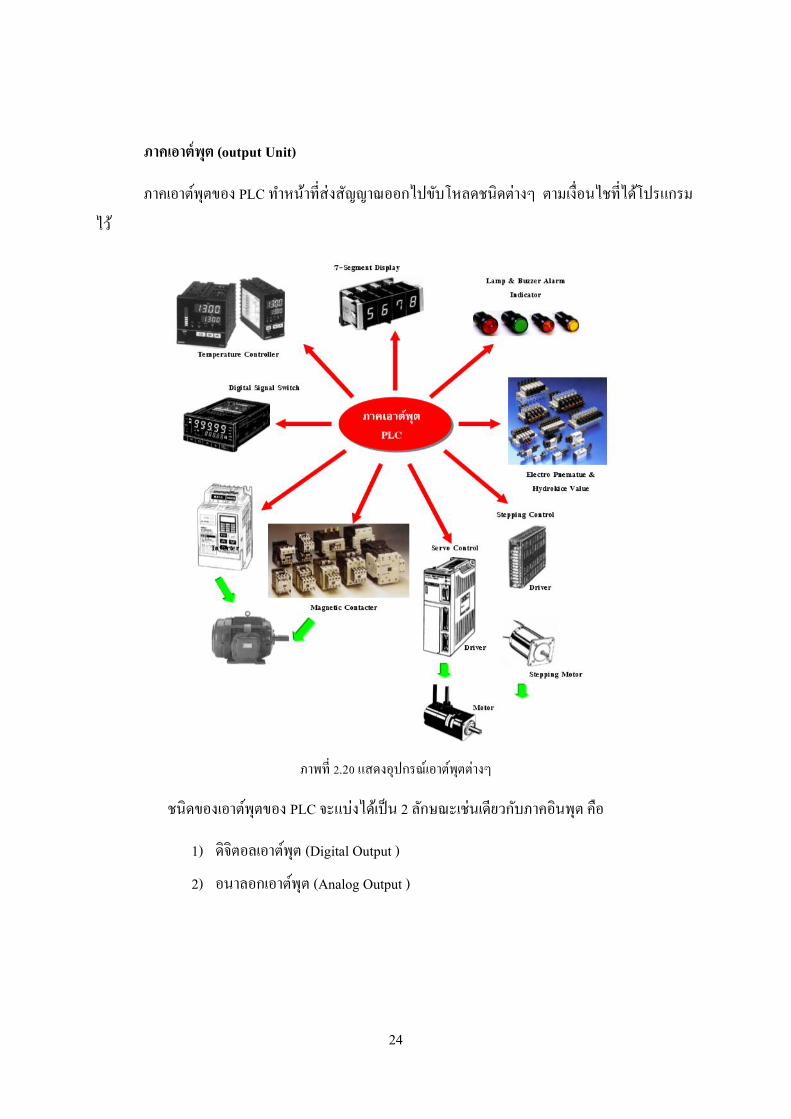
ภาคเอาตพต (output Unit)
ภาคเอาตพตของ PLC ท าหนาทสงสญญาณออกไปขบโหลดชนดตางๆ ตามเงอนไชทไดโปรแกรม
ไว
ภาพท 2.20 แสดงอปกรณเอาตพตตางๆ
ชนดของเอาตพตของ PLC จะแบงไดเปน 2 ลกษณะเชนเดยวกบภาคอนพต คอ
1) ดจตอลเอาตพต (Digital Output )
2) อนาลอกเอาตพต (Analog Output )

25
2.4 LabVIEW LabVIEW เปนโปรแกรมคอมพวเตอรทสรางเพอนามาใชในดานการวดและเครองมอวดสาหรบงานทางวศวกรรม LabVIEW ยอมาจาก Laboratory Virtual Instrument Engineering Workbench ซงหมายความวาเปนโปรแกรมทสราง เครองมอวดเสมอนจรงในหองปฏบตการทางวศวกรรม ดงนนจดประสงคหลกของการทางานของโปรแกรมนกคอการจดการในดานการวดและเครองมอวด อยางมประสทธภาพ และในตวของโปรแกรมจะประกอบไปดวยฟงกชนทใชชวยในการวดมากมายและแนนอนทสด โปรแกรมนจะมประโยชนอยางสงเมอใชรวมกบเครองมอวดทางวศวกรรมตางๆ สงท LabVIEW แตกตางจากโปรแกรมอนอยางเหนไดชดทสดกคอ LabVIEW นเปนโปรแกรมประเภท GUI (Graphic User Interface) โดยสมบรณ นนคอเราไมจาเปนตองเขยน code หรอคาสงใดๆ ทงสน และทส าคญลกษณะภาษาทใชในโปรแกรมนเราจะเรยกวาเปน ภาษารปภาพ หรอเรยกอกอยางวาภาษา G (Graphical Language) ซงจะแทนการเขยนโปรแกรมเปนบรรทดอยางทเราคนเคยกบภาษาพนฐาน เชน C, BASIC ดวยรปภาพหรอสญลกษณทงหมด ซงแมวาในเบองตนเราอาจจะสบสนกบการจดเรยบหรอเขยนโปรแกรมบาง แตเมอเราคนเคยกบการใชโปรแกรมนแลวเราจะพบวา LabVIEW นมความสะดวกและสามารถลดเวลาในการเขยนโปรแกรมลงไปไดมาก โดยเฉพาะในงานเขยนโปรแกรมคอมพวเตอรเพอเชอมตอกบอปกรณอนๆ เพอใชในการวดและการควบคม สาหรบโปรแกรมประเภททใชตวหนงสอ หรอทเรยกวา Text Base มความยงยากในการจดการกบต าแหนงการสงผานขอมลตามอปกรณเชอมตอเชน Port หรอ Card ตางๆ รวมถงการจดวางต าแหนงในหนวยความจาเพอทจะสามารถรวบรวมขอมลมาใชในการค านวณและเกบขอมลใหไดประโยชนสงสด ปญหาเหลานไดรบการแกไขใน LabVIEW โดยไดมการบรรจโปรแกรมจานวนมาก หรอ Libraries ไวสาหรบจดการกบปญหาเหลานน ไมวาอปกรณการเชอมตอจะเปน DAQ (Data Acquisition), GPIB (General Purpose Interface Bus หรอกอนหนานรจกกนในชอ Hewlett Packard Interface Bus, HP-IB), พอรตอนกรม หรอ Serial Port เพอใชตดตอกบอปกรณทสงผานขอมลแบบอนกรม (Serial Instrument) รวมถงการวเคราะหขอมลทไดดวยวธการตางๆ นอกจากนใน Libraries เหลานนยงไดบรรจฟงกชนการทางานทส าคญอกหลายประการเชน signal generation, signal processing, filters, สถต, พชคณต และคณตศาสตรอนๆ ดงนน LabVIEW จงทาใหการวดและการใชเครองมอวดกลายเปนเรองงายลงไปมาก และทาใหคอมพวเตอรสวนบคคลของเรากลายเปนเครองมอทางดานการวดหลายชนดอยในเครองเดยว LabVIEW โดยจดประสงคหลกแลว บรษท National Instrument ไดเรมพฒนาโปรแกรมทจะนามาใชกบระบบเครองมอวดทมความงายในการเขยนโปรแกรมและมฟงกชนเพอจะชวยในการวดทางวศวกรรมใหมากทสด เพราะดวยความเปนมาบรษท National Instrument เรมจากการผลตอปกรณทใชกบการวดทางวศวกรรม ไมใชบรษททเรมตนมาจากการผลต Software เปนหลก ดงนนคงไมผดนกสาหรบผทตองการจะใชประโยชนสงสดจากโปรแกรม LabVIEW คอผทตองการจะนาขอมลจากภายนอกเครองคอมพวเตอร เขา
26
มาในเครองเพอทาการการวเคราะหขอมล ประมวลคา แสดงผลและในหลายกรณใชในระบบควบคมอตโนมตดวยคอมพวเตอร
ขอไดเปรยบสงสดของ LabVIEW คอการพยายามทาใหเครองคอมพวเตอรของเราเมอรวมกบ LabVIEW และ อปกรณเชอมตอเพอการเกบขอมล (Data Acquisition Card) แลวสามารถเปลยนเครองคอมพวเตอรสวนบคคลของเราใหกลายเปนเครองมอวดในหลายรปแบบ ไมวาจะเปน Oscilloscope, Multi-meter, Function Generator, Strain Meter Thermometer หรอเครองมอวดอนๆ ตามทเราตองการ ทาใหเราสามารถใชคอมพวเตอรในการทาการวดและเครองมอวดไดอยางกวางขวาง ขอไดเปรยบเหนอการใชอปกรณจรงเหลานนคอ Virtual Instrument สามารถปรบเปลยนใหเหมาะสมกบการใชงานของผใชแตละกลมได โดยการเปลยน VI ใหเปนไปตามตองการเปนเรองทไมยงยากนก ขอดอกประการหนงในการหนงของการใชคอมพวเตอรเปนเครองมอวดกคอ สามารถใชทาเปน Data Logger และ PLC (Programmable Logical Controlled) ไดพรอมกน ซงโดยปกตแลวระบบควบคมมกจะไมมในเครองมอวดจรงขนพนฐาน หรอ Data Logger แมจะเกบขอมลได แตการสงการทางานกบอปกรณตวอนจะมความยงยากในการสงการมาก กลาวโดยสรปกคอหากเราม LabVIEW, คอมพวเตอรและ DAQ Card (หรอระบบการตดตอสอสารอน
เชน GPIB หรอ Serial Port ซงรายละเอยดและความแตกตางจะกลาวตอไปภายหลง เราสามารถสราง
เครองมอวดเสมอนจรงไดมากมาย หากเราตองม Transducer ทเหมาะสมประกอบอยดวยซงจดนเองคอขอด
ของโปรแกรมน
Ni myrio Ni myrio เปนอปกรณลาสดทใชสถาปตยกรรม Rio ทยอมาจาก reconfigurable I/O และเปน
เทคโนโลยทถกอางองถงในหลายผลตภณฑของ Ni โดยผลตภณฑทใชเทคโนโลย Rio และ fpga น นสามารถถกโปรแกรมไดดวย software Ni LabVIEW สามารถปรบเปลยน input และ output ไดภายในประกอบดวย dual core arm cortex a9 real time processor และ Xilinx fpga โดยสามารถเชอมตอกบอปกรณภายนอกผานบสตางๆ กบเซนเซอรภายนอกได ดวยขนาดกะทดรดสามารถพกพาไดงายมชองสญญาณอนพตเอาตพตหลายชองสญญาณ และราคาไมแพงท าให ni myrio เปนอปกรณทเหมาะส าหรบใชเปนเครองมอประกอบการเรยนการสอนและการท าวจยส าหรบนสตและนกศกษาเพอใหนกศกษาไดสามารถพสจนทฤษฎทเรยนมาดวยการลงมอจรง ni myrio สามารถประยกตใชเพอการพฒนา application ไดหลากหลายแขนงใน application ดานวทยาศาสตรและวศวกรรม อาทโครงการวศวกรรมดานอเลกทรอนกส ดานระบบไฟฟาควบคม ดานหนยนตอตโนมต หรอ ดานระบบควบคมแบบสมองกลฝงตวเปนตน
27
รปท 2.21 Ni myRIO (ทมา: www.ni.com/myrio)
คณสมบตของ ni myrio - เขยนโปรแกรมLabVIEW fpga และโปรแกรม ลงบนตว fpga ไดโดยตรง - หนวยประมวลผล dual core arm cortex a9 processor รนลาสด รองรบการเชอมตออปกรณภายนอก
อาทเซนเซอรและ actuator - โปรแกรมตว arm cortex a9 และ fpga โดยตรงผานพอรต usb - Processor arm cortex a9 รองรบการเขยนโปรแกรมภาษา c/c++

28
2.5 การสงผานขอมลผานชองสอสาร
ในการถายโอนขอมลแบบอนกรมนน ขอมลจะไดรบการสงออกมาครงละ 1 บตระหวางจดรบและจด
สง จะเหนวามการสงขอมลแบบอนกรมนจะชากวาการสงขอมลแบบขนาน แตยงคงใชอยกเพราะ ตวกลาง
การสอสารตองการชองเดยวหรอมสายเพยงคเดยวซงจะประหยดคาใชจาย ในการใชตวกลางมากกวาแบบ
ขนานซงถาเปนระยะทางไกลจะดเพราะเรามระบบการสอสารทางโทรศพท อยแลว จงสามารถน ามาใชใน
การสงขอมลแบบอนกรมนได
1. UART ยอมาจากค าวา Universal Asynchronous Receiver Transmitter หมายถงอปกรณทท าหนาทรบและ
สงขอมลแบบ อะซงโครนส (Asynchronous) ซงเปนสวนหนงในการสอสารอนกรม แบบ Asynchronous แทจรงแลวการสอสารแบบอนกรมจะแบงเปน 2 แบบ คอ 1) การสอสารอนกรมแบบ Synchronous เปนรปแบบทใชวธสงขอมล โดยใชสญญาณ Clock มาเปนตวก าหนดจงหวะ การรบสงขอมล การสงขอมลแบบน เปนการรบสงทคอนคางมคณภาพ และสงไดทความเรวสง มโอกาสทขอมลจะสญหายระหวางการสงนอย ตวอยางการสงขอมลลกษณะนเชน I2C, I2S, SPI ขอเสยของการสงขอมลแบบนคอ ตองใชสายสญญาณมาก เพราะวาตองสง Clock ไปดวย
รปท 2.22 รปแบบของการสงสนญาณทางไฟฟาของการสอสาร (ทมา: www.mind-tek.net/serial.php)
2) การสอสารอนกรมแบบ Asynchronous เปนการสงขอมลทไมตองใชสญญาณ Clock มาเปนตวก าหนดจงหวะการรบสงขอมลแต ใชวธก าหนด รปแบบ Format การรบสงขอมลขนมาแทน และ อาศยการก าหนด ความเรวของการรบ และ สง ทเทากนทงฝงรบและฝงสง ขอดของการใช Asynchronous คอสามารถสอสารแบบ Full Duplex รบ และ สงไดในเวลาเดยวกน แต Asynchronous มโอกาสทขอมลจะสญหายขณะรบสงขอมล หรอ รบสงขอมลผดพลาดไดมากกวาแบบ Synchronous

29
รปท 2.23 รปแบบของการจดชดขอมล (ทมา: www.mind-tek.net/serial.php)
เรมตนจาก Start Bit เปน Logic 0 จากนนจะตามดวย Data ทเราสง แลวจะถกปดดวย STOP Bit เปน Logic 1
ส าหรบผเรมตนศกษา ถาคณตองการตดตอสอสาร UART ระหวาง ไมโครคอนโทรลเลอร กบ คอมพวเตอร
สามารถท าไดโดยใชโปรแกรม HyperTerminal เขาชวย เพอการทดสอบการ รบ และ สง ขอมล
2.TTL (Transistor-Transistor Logic)
TTL เปนระดบแรงดนทถกก าหนดขนในยคแรกๆเพอใชระหวาง Transistor กบ Transistor ภายใน
วงจรรวม(IC) ดงนน TTL จะใชระดบแรงดน อยท 0 – 5 V แตในปจจบนมอปกรณหลายเบอรทท างาน
ในชวง 0 – 3.3 V (เรยกแรงดนระดบนวา LVTTL) ซงผใชควรตรวจสอบจาก Datasheet ของอปกรณทใช
เสยกอนวาเปนระดบแรงดนแบบใด เพราะหากใชผดประเภทจะท าใหอปกรณเสยหาย
รปท 2.24 รปแบบของการสงสนญาณทางไฟฟา (ทมา: www.mind-tek.net/serial.php)
30
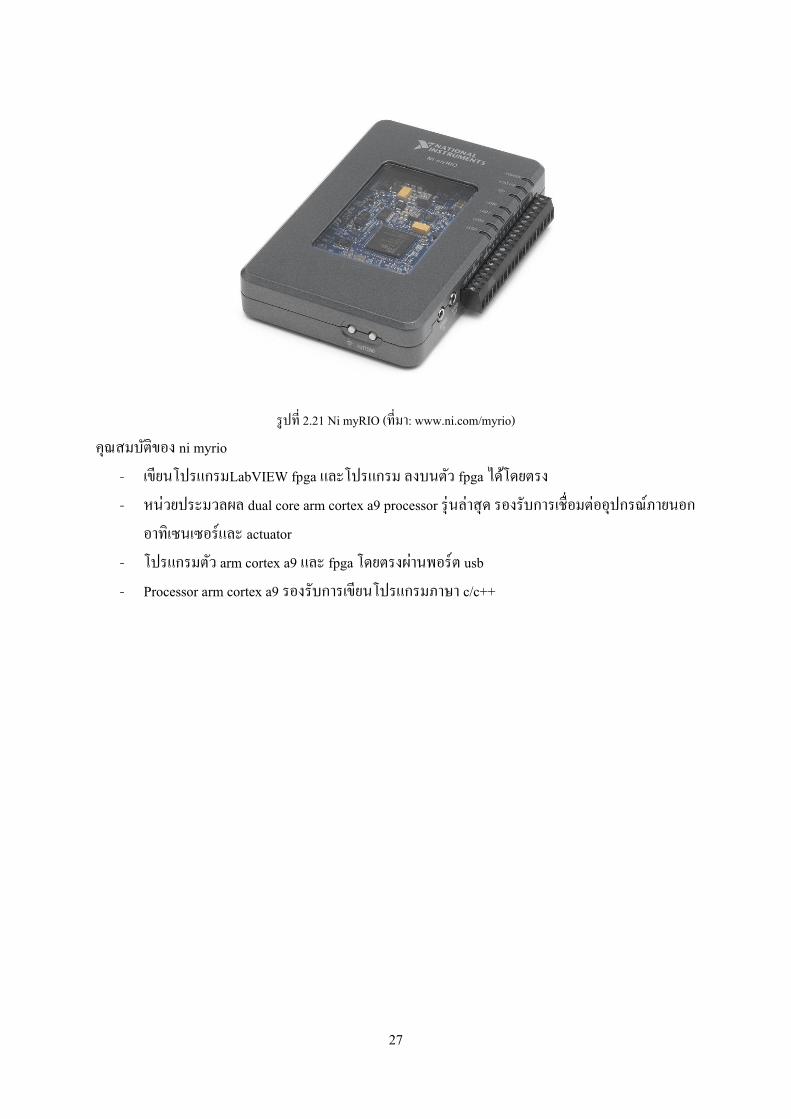
แนวคดวธเชอมตอระหวางอปกรณ
รปท 2.25 แผนผงการสงขอมลระหวางอปกรณ (ทมา: www.mind-tek.net/serial.php)
จากรปแสดงถงการเชอมตอ ระหวาง Device เพอสง Data หากนระหวางบอรดดวย UART 1) A สงขอมล ออกไปทางขา Tx ไปยง B ซงเปนฝงรบ เพราะฉะนน ตองตอสายสญญาณจากขา Tx ของ A ไปยงขา Rx ของ B 2) B สงขอมล ออกไปทางขา Tx ไปยง A ซงเปนฝงรบ เพราะฉะนน ตองตอสายสญญาณจากขา Tx ของ B ไปยงขา Rx ของ A 3) ตองตอ GND ของทง A และ B รวมกนเพอท าใหระดบแรงดนของทง 2 บอรดมจดอางองเดยวกน
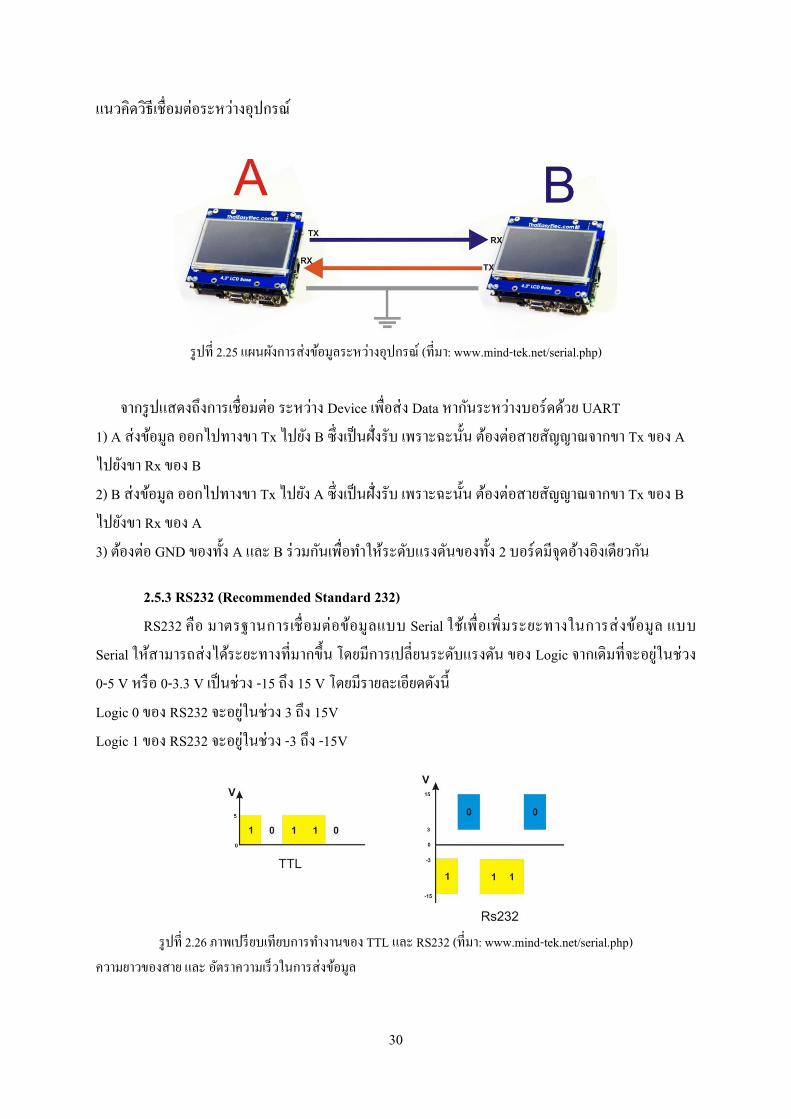
2.5.3 RS232 (Recommended Standard 232) RS232 คอ มาตรฐานการเชอมตอขอมลแบบ Serial ใชเพอเพมระยะทางในการสงขอมล แบบ
Serial ใหสามารถสงไดระยะทางทมากขน โดยมการเปลยนระดบแรงดน ของ Logic จากเดมทจะอยในชวง 0-5 V หรอ 0-3.3 V เปนชวง -15 ถง 15 V โดยมรายละเอยดดงน Logic 0 ของ RS232 จะอยในชวง 3 ถง 15V Logic 1 ของ RS232 จะอยในชวง -3 ถง -15V
รปท 2.26 ภาพเปรยบเทยบการท างานของ TTL และ RS232 (ทมา: www.mind-tek.net/serial.php)
ความยาวของสาย และ อตราความเรวในการสงขอมล

31
Baud rate Maximum cable length (ft.)
19200 50
9600 500
4800 1000
2400 3000
ตารางท 2.1 ตารางแสดงคาความยาวสายตออตราการสงขอมล
2.6 เอนโคดเดอรตรวจรต าแหนง (Position Encoder)
ในกรณทตองการวดระยะทางยาวๆมกนยมใชตวตรวจรต าแหนงแบบดจตอลโดยเฉพาะอยางยงถาเปน
ระบบการวเคราะหแบบดจตอล เนองจากตวตรวจรชนดนจะไมถกจ ากดชวงของการวดดวยกลไก แต
ความสามารถในการวดจะขนอยกบซอรฟแวรทใชเปนหลก
ตวตรวจรต าแหนงแบบดจตอลในทนจะกลาวถง เอนโคดเดอรตรวจรต าแหนง (Position Encoder) ซง
สามารถแบงตามโครงสรางการเคลอนทออกไดเปนสองแบบดวยกนคอ
1. เอนโคดเดอรต าแหนงแบบหมน (Rotation Position Encoder)
2. เอนโคดเดอรต าแหนงแบบเคลอนทแนวเสนตรง (Linear Position Encoder)
และถาจ าแนกตวตรวจรแบบเอนโคดเดอรออกตามลกษณะของสญญาณเอาทพต จะไดเปน 2 แบบหลก ๆ
คอ
1. แบบเอนโคดเดอรแบบเพมคา (Incremental Encoder)
2. แบบเอนโคดเดอรแบบสมบรณ (Absolute Encoder)
2.6.1เอนโคดเดอรตรวจรต าแหนงแบบเพมคา
เอนโคดเดอรต าแหนงแบบเพมคา (Incremental Position Encoder) ประกอบดวยแผนกลมหรอแผน
บรรทดแนวตรง ทเคลอนทตามกลไกทตองการวดระยะทาง ในกรณของออปตคอลเอนโคดเดอร จะมการ
เจาะรเพอใหแสงผานไปเปนระยะ ๆ เพอบอกต าแหนงของแผนหมน โดยจะใหสญญาณเอาทพตเปน

32
สญญาณพลสออกมาทกครงทมการหมนแกนเอนโคดเดอร ท าใหสามารถทราบมมทหมนหรอระยะทาง
เคลอนทไปได โดยเอาทพตปกตจะมแคเพยงบตเดยวหรอสองบตเพอใหบอกทศทางได
ภาพท 2.27 ออปตคอลเอนโคดเดอรแบบเพมคา (a) แบบหมน (b) แบบเคลอนแนวตรงเชงเสน
เอนโคดเดอรแบบนมขอเสยตรงทขอมลของการเคลอนทจะหายไปหมดเมอแหลงจายไฟฟาดบหรอ
มการแยกสายสญญาณออกแมเพยงชวขณะเดยวหรอเมอมการรบกวนของสญญาณเกดขน ท าใหตองมการ
ปรบเทยบกบจดอางองอยตลอดเวลาเพอความถกตอง นอกจากนขอมลทจะน าไปใชยงมกจ าเปนทจะตอง
ผานวงจรนบ (Counter) เพอใหไดขอมลเชงขนานทใชในระบบคอมพวเตอร
2.6.2เอนโคดเดอรตรวจรต าแหนงแบบสมบรณ
เอนโคดเดอรตรวจรต าแหนงแบบสมบรณจะใหเอาทพตในรปแบบทเปนรหส ทตรงกบต าแหนงท
กลไกเคลอนทไป หลกการท างานโดยรวมจะเหมอนกบเอนโคดเดอรแบบเพมคา แตในตวเอนโคดเดอร
ตรวจรต าแหนงแบบสมบรณ จะมหวอานหลายชดเทากบจ านวนบตเอาทพต การเจาะรบนแผนแตละชดกจะ
มระยะหางเปนทวคณท าใหสามารถทราบต าแหนงของการหมนโดยทนท
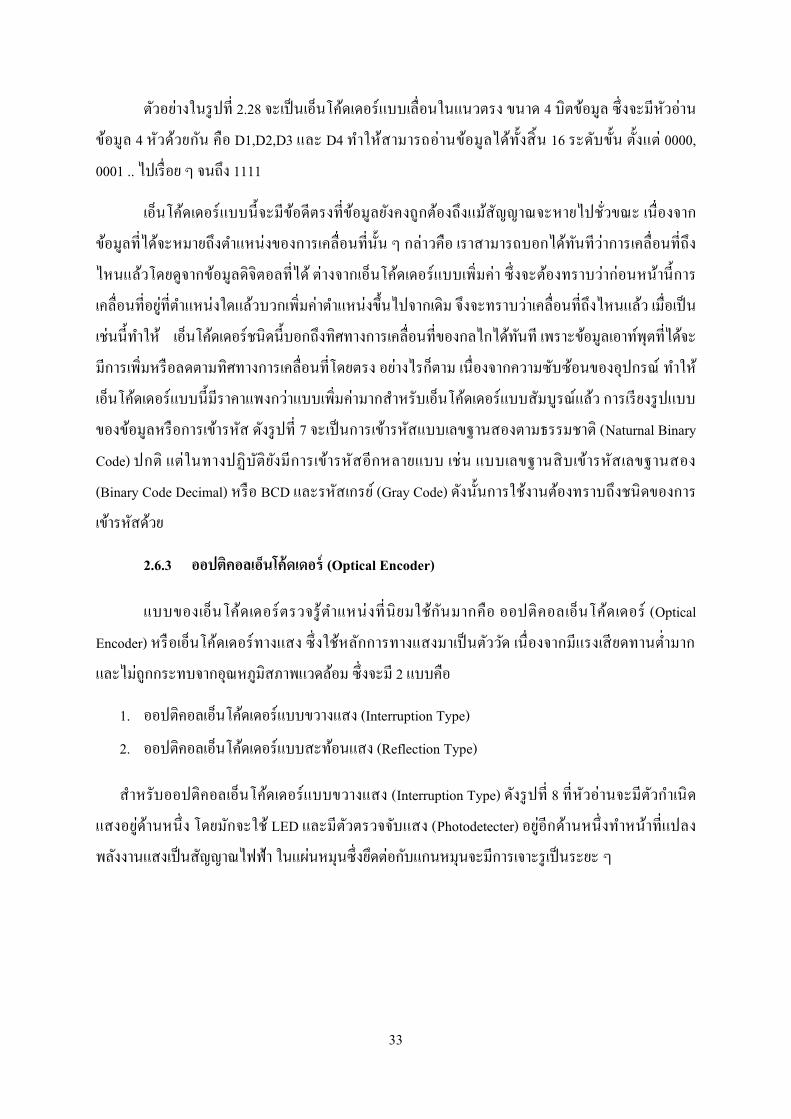
ภาพท 2.28 ออปตคอลเอนโคดเดอรแบบสมบรณแบบเลอนแนวตรงขนาด 4 บต
33
ตวอยางในรปท 2.28 จะเปนเอนโคดเดอรแบบเลอนในแนวตรง ขนาด 4 บตขอมล ซงจะมหวอาน
ขอมล 4 หวดวยกน คอ D1,D2,D3 และ D4 ท าใหสามารถอานขอมลไดท งสน 16 ระดบขน ตงแต 0000,
0001 .. ไปเรอย ๆ จนถง 1111
เอนโคดเดอรแบบนจะมขอดตรงทขอมลยงคงถกตองถงแมสญญาณจะหายไปชวขณะ เนองจาก
ขอมลทไดจะหมายถงต าแหนงของการเคลอนทนน ๆ กลาวคอ เราสามารถบอกไดทนทวาการเคลอนทถง
ไหนแลวโดยดจากขอมลดจตอลทได ตางจากเอนโคดเดอรแบบเพมคา ซงจะตองทราบวากอนหนานการ
เคลอนทอยทต าแหนงใดแลวบวกเพมคาต าแหนงขนไปจากเดม จงจะทราบวาเคลอนทถงไหนแลว เมอเปน
เชนนท าให เอนโคดเดอรชนดนบอกถงทศทางการเคลอนทของกลไกไดทนท เพราะขอมลเอาทพตทไดจะ
มการเพมหรอลดตามทศทางการเคลอนทโดยตรง อยางไรกตาม เนองจากความซบซอนของอปกรณ ท าให
เอนโคดเดอรแบบนมราคาแพงกวาแบบเพมคามากส าหรบเอนโคดเดอรแบบสมบรณแลว การเรยงรปแบบ
ของขอมลหรอการเขารหส ดงรปท 7 จะเปนการเขารหสแบบเลขฐานสองตามธรรมชาต (Naturnal Binary
Code) ปกต แตในทางปฏบตยงมการเขารหสอกหลายแบบ เชน แบบเลขฐานสบเขารหสเลขฐานสอง
(Binary Code Decimal) หรอ BCD และรหสเกรย (Gray Code) ดงนนการใชงานตองทราบถงชนดของการ
เขารหสดวย
2.6.3 ออปตคอลเอนโคดเดอร (Optical Encoder)
แบบของเอนโคดเดอรตรวจรต าแหนงทนยมใชกนมากคอ ออปตคอลเอนโคดเดอร (Optical
Encoder) หรอเอนโคดเดอรทางแสง ซงใชหลกการทางแสงมาเปนตววด เนองจากมแรงเสยดทานต ามาก
และไมถกกระทบจากอณหภมสภาพแวดลอม ซงจะม 2 แบบคอ
1. ออปตคอลเอนโคดเดอรแบบขวางแสง (Interruption Type)
2. ออปตคอลเอนโคดเดอรแบบสะทอนแสง (Reflection Type)
ส าหรบออปตคอลเอนโคดเดอรแบบขวางแสง (Interruption Type) ดงรปท 8 ทหวอานจะมตวก าเนด
แสงอยดานหนง โดยมกจะใช LED และมตวตรวจจบแสง (Photodetecter) อยอกดานหนงท าหนาทแปลง
พลงงานแสงเปนสญญาณไฟฟา ในแผนหมนซงยดตอกบแกนหมนจะมการเจาะรเปนระยะ ๆ

34
ภาพท 2.29 การตรวจจบแบบขวางแสง
ออปตคอลเอนโคดเดอรแบบสะทอนแสง(Reflection Type) จะใชแผนหมนททาสด าและขาว
สลบกนไป โดยแหลงก าเนดแสงจะสองแสงไปสะทอนกลบมายงตวตรวจจบแสง
ภาพท 2.30 การตรวจจบแบบสะทอนแสง
หลกการท างานของออปตคอลเอนโคดเดอร ยกตวอยางแบบขวางแสง คอ เมอแสงผานชองเจาะร
ตวตรวจจบทางแสงจะรบสญญาณเปน ลอจก 1 และเมอแสงถกขวางตวตรวจจบทางแสงจะรบสญญาณเปน
ลอจก 0 เมอแผนกลมหมนจะท าใหตวตรวจจบแสงสงสญญาณไฟฟาออกมาเปนชวง ๆ เทาจ านวนรทผาน
ไป เชน ในออปตคอลเอนโคดเดอรของรปท 2.30 (a) จะมสญญาณออกมา 8 พลสใน 1 รอบของการหมน
หรอทก ๆ 45 องศาตอพลส
เอนโคดเดอรทในอตสาหกรรมจะมความละเอยด (Resolution) หรอจ านวนขนใน 1 รอบไมเทากน
โดยทจะพบไดมตงแต 100 ขนตอรอบ ไปจนถง 6000 ขนตอรอบ ซงแบบทนยมใชกนมากในอตสาหกรรม
จะเปนแบบ 100 ขนตอรอบหรอ 256 ขนตอรอบ และเสนรอบวงของแผนกลมมกจะมขนาด 25 ถง 90 mm.

35
2.7 เซอรโวมอเตอร (Servo Motor)
เซอรโวมอเตอร (Servo Motor) เปนมอเตอรทมการควบคมการเคลอนทของมน (State) ไมวาจะเปน
ระยะ ความเรว มมการหมน โดยใชการควบคมแบบปอนกลบ (Feedback control) เปนอปกรณทสามารถ
ควบคมเครองจกรกล หรอระบบการท างานนนๆ ใหเปนไปตามความตองการ เชน ควบคมความเรว
(Speed), ควบคมแรงบด (Torque), ควบคมแรงต าแหนง (Position), ระยะทางในการเคลอนท(หมน)
(Position Control) ของตวมอเตอรได ซงมอเตอรทวไปไมสามารถควบคมในลกษณะงานเบองตนได โดยให
ผลลพธตามความตองการทมความแมนย าสง
ขนาดของ Servo Motor จะมหนวยในการบอกขนาดเปนวตตเซอรโวมอเตอรของพานาโซนคจะม
ขนาดตงแต 50W-15kWท าใหผใชงานมความหลากหลายในการใชงาน
ภาพท 2.31 เซอรโวมอเตอร (Servo Motor)
1. ประเภทของเซอรโวมอเตอร
โดยทวจะมทงดซและเอซเซอรโว ในเครองจกรรนเกาๆเราจะพบวาดซเซอรโวมอเตอรมการใช
เครองจกรกลอตสาหกรรมมากกวาเอซเซอรโวมอเตอรเนองจากชวงทผานมาการควบคมกระแสกระแสสงๆ
นนจะตองใช SCRs แตปจจบนทรานซสเตอรไดพฒนาขดความสามารถใหตดตอกระแสสงและใชงานท
ความถไดสงๆขน จงท าใหระบบควบคมทางเอซและระบบเซอรโวไดถกน ามาใชงานมากขน ซงสามารถ
แยกประเภทของเซอรโวไดดงน

36
ภาพท 2.32 นยามตามคมออางองเซอรโวฉบบภาษาเยอรมน
1.1 มอเตอรชนดทมแปรงถาน
เซอรโวมอเตอรชนดนทสเตเตอรจะเปนแมเหลกถาวร สวนโรเตอรยงใชแปรงถานและคอมมวเตอร
เรยงกระแสเขาสขดลวดอารเมเจอร เหมอนกบดซมอเตอรทวไป
1.2 เซอรโวมอเตอรชนดทไมมแปรงถาน
เซอรโวมอเตอรในกลมนประกอบดวยดซเซอรโว (DC Brushless Servo โรเตอรท าดวยแมเหลกถาวร)
เอซเซอรโว (AC Servo) ซงมทงแบบซงโครนสเซอรโว อะซงโครนสเซอรโว(การน าอนดคชนมอเตอรมาใช
ท าเปนระบบขบเคลอนเซอรโวมอเตอร) และ สเตปปงเซอรโวมอเตอร
1.3 โครงสรางของเซอรโวมอเตอร
ขอจ ากดอยางหนงของระบบควบคมเซอรโวกคอการใชงานจะตองเปนแบบ Closed loop เทานน
การใชงานระบบควบคมเซอรโวไมสามารถเลอกควบคมเปนแบบ Open loop ไดเหมอนกนระบบขบเคลอน
เอซ (AC Drives) การตอบสนองของระบบเซอรโวเชน อตราเรง แรงบด และต าแหนงทควบคม จะไม
เปนไปตามวตถประสงคหากไมมสญญาณปอนกลบไปยงชดขบเคลอนเซอรโว
การควบคมการท างานในระบบนอปกรณปอนกลบหรอเอนโคดเตอร (Encoder) จะมบทบาทความส าคญ
อยางยงเสมอนกบเปนของคกนชนดทเรยกวาขาดซงกนและกนไมได ในทางปฎบตจงท าเซอรโวมอเตอร
และเอนโคดเตอร ถกออกแบบและผลตสรางขนมาคกนในลกษณะเปนแพคเกจ (Package ซงม Encoder ตด
อยทสวนทายของมอเตอร ดงรป

37
ภาพท 2.33 โครงสรางของ AC servo Motor
Gearheads = เกยรส าหรบลดความเรวรอบเพอเพมแรงบด
Shafts = เพลาของมอเตอร
Flanges = หนาแปลนส าหรบตดตงมอเตอร
Feed back = อปกรณปอนกลบหรอ encoder
Connectorization = ขวตอสายไฟเขามอเตอร และขวตอสายส าหรบ Encoder
Breakes = ชดเบรก
โครงสรางของ AC servo Motor จะคลายกบมอเตอร 3 เฟสทว ๆ ไป ซงจะประกอบดวย 2สวนท
ส าคญ คอ สเตเตอรและโรเตอร โดยสเตเตอรจะประกอบดวยขดลวด 3 ชด ขดลวดภายในจะตอเปนแบบ
สตาร (Star หรอ WYE) และมสายตอมาทขวตอสายดานนอก 3 เสน (จดนวทรอลจะอยดานใน) สวนโร
เตอรท าดวยแมเหลกถาวร (Permanent Magnet) ไมมขดลวดพน,ไมมคอมมวเตเตอร และไมมแปรงถาน
(Brushless)
โครงสรางทไมมขดลวดพนไมและแปรงถาน จะท าใหประสทธภาพของมอเตอรสงขน ไมมการสญ
เสยในขดลวดทองแดง ไมตองบ ารงรกษาเนองจากแปรงถาน ไมเกดประกายไฟเนองจากการเรยงกระแสจาก
แปรงถานผานคอมมวเตอรไปยงขดลวดทองแดงทพนอยในตวโรเตอร
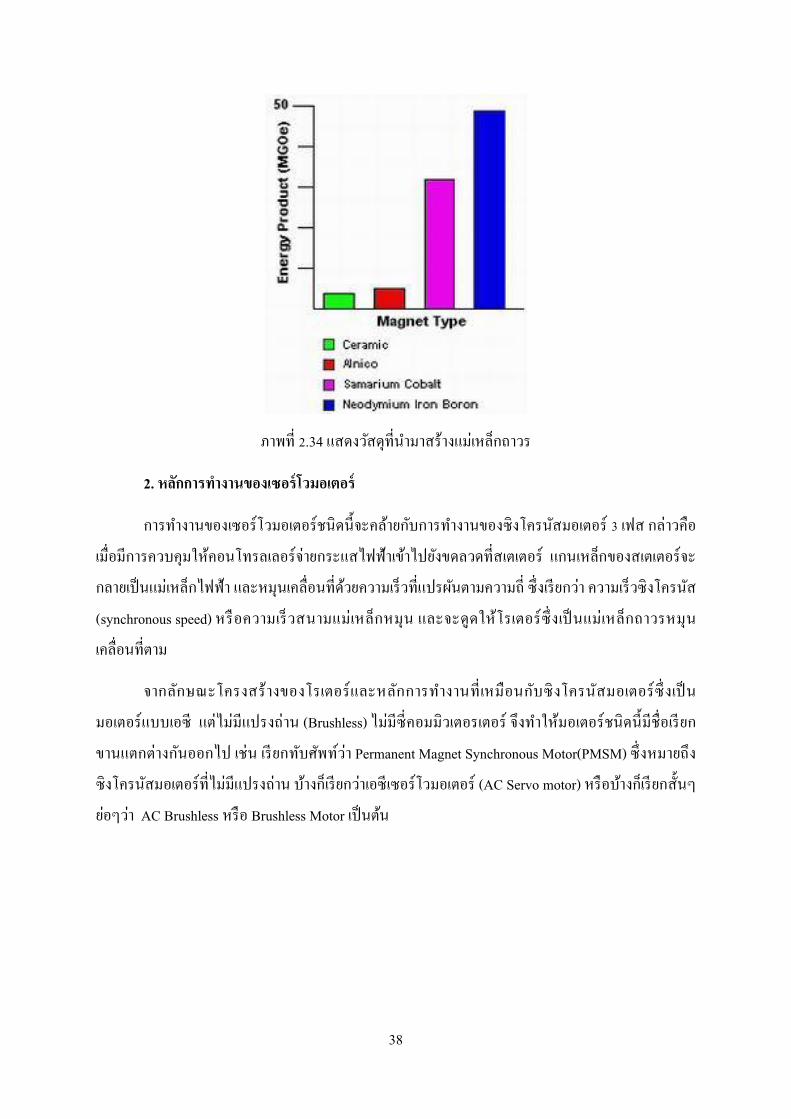
ส าหรบวสดทน ามาสรางแมเหลกถาวรนจะแตกตางกนไป โดยขนอยกบราคาและเทคโนโลยของ
บรษทผผลดนนๆ ซงมตงแตชนดทราคาถกเชน เซรามก (เฟอไรต) จนถงการใชวสดทมราคาแพงอยางเชน
ซามาเรยม โคบอลต หรอ นโอไดเมยม เปนตน (ปจจบนเอซเซอรโวมอเตอรสวนใหญจะใชวสดสาร
แมเหลกแบบ นโอไดเมยม เนองจากมคณสมบตความเปนแมเหลก และความเหมาะสมเรองราคาดกวา เมอ
เปรยบเทยบกบวสดสารแมเหลกแบบอนๆ
38
ภาพท 2.34 แสดงวสดทน ามาสรางแมเหลกถาวร
2. หลกการท างานของเซอรโวมอเตอร
การท างานของเซอรโวมอเตอรชนดนจะคลายกบการท างานของซงโครนสมอเตอร 3 เฟส กลาวคอ
เมอมการควบคมใหคอนโทรลเลอรจายกระแสไฟฟาเขาไปยงขดลวดทสเตเตอร แกนเหลกของสเตเตอรจะ
กลายเปนแมเหลกไฟฟา และหมนเคลอนทดวยความเรวทแปรผนตามความถ ซงเรยกวา ความเรวซงโครนส
(synchronous speed) หรอความเรวสนามแมเหลกหมน และจะดดใหโรเตอรซงเปนแมเหลกถาวรหมน
เคลอนทตาม
จากลกษณะโครงสรางของโรเตอรและหลกการท างานทเหมอนกบซงโครนสมอเตอรซงเปน
มอเตอรแบบเอซ แตไมมแปรงถาน (Brushless) ไมมซคอมมวเตอรเตอร จงท าใหมอเตอรชนดนมชอเรยก
ขานแตกตางกนออกไป เชน เรยกทบศพทวา Permanent Magnet Synchronous Motor(PMSM) ซงหมายถง
ซงโครนสมอเตอรทไมมแปรงถาน บางกเรยกวาเอซเซอรโวมอเตอร (AC Servo motor) หรอบางกเรยกสนๆ
ยอๆวา AC Brushless หรอ Brushless Motor เปนตน

39
ภาพท 2.35 โครงสรางและการท างานของ AC Servo Motor
3. โครงสรางของระบบควบคมเซอรโวมอเตอร
ลกษณะของระบบควบคมเซอรโวมอเตอรจะเปนระบบควบคมแบบลปปด(Closed loop
control) ซงประกอบดวย 3 โหมดการควบคมคอ โหมดการควบคมแรงบด (Torque Control Mode) ซงอย
วงรอบหรอลปในสด โหมดการควบคมอตราเรง(Velocity Control Mode) และโหมดการควบคมต าแหนง
(Position Control Mode) ซงอยลปดานนอกสด โดยมองคประกอบทส าคญๆดงรป
ภาพท 2.36 โครงสรางของระบบควบคมเซอรโวมอเตอร
1) เซอรโวมอเตอร (Servo Motor) (ต าแหนง 4.2)
2) ชดควบคมการขบเคลอนเซอรโว (Servo Drive,Servo Amplifier หรอบางกเรยกวา servo controller )
(ต าแหนง 4.4, 4.5, 4.6)
3) อปกรณปอนกลบ (Feedback Device เชน Speed encoder และ Position Sensor ) (ต าแหนง 4.3)

40
4. องคประกอบในการท างานของเซอรโวมอเตอร
การท างานเพยงตว Servo Motor เพยงอยางเดยวนนไมสามารถท างานได การทจะให Servo
Motor จะควบคมลกษณะทกลาวมาขางตนนนตองมองคประกอบดงน
4.1 คอนโทรลเลอร (Controller)
หลกการท างานหลกๆ หนาทของ Controller คอ มหนาทรบค าสงจากผใชงานวาตองการให Servo
Motor น น เค ลอน ทดวยความเรวเท าไหรและระยะทาง ใกลหรอไกลแคไหน หนาทตรงจดนจะ
เปน Controller จะเปนตวก าหนดใหกบตว Servo Moter
ภาพท 2.37 คอนโทรลเลอร (Controller)
4.2 เซอรโวไดรฟเวอร (Servo Driver)
หนาทของ Servo Driver คอ จะรบสญญาณมาจาก Controller และส งการใหกบตว เซอรโว
มอเตอร เค ลอนทตามท Controller ส งการมา แตท าไม Controller ไมส งการควบคมไปท เซอรโว
มอเตอร โดยตรง เนองจาก Servo Driver จะเปนตวทปรบตงคาของตว เซอรโวมอเตอร ใหท างานตาม
รปแบบของการควบคมไมวา จะเปนการควบคม ความเรว(Speed Control) , แรงบด(Toucque) และ
ต าแหนง(Position Control) ตว Servo Driver จะเปน ตวก าหนดคาตวแปรหรอพารามเตอรตางๆ ใหกบ
ตว เซอรโวมอเตอร ใหท างานไดอยางถกตองและแมนย า เพราะฉะนนเมอใช เซอรโวมอเตอร กจะตอง
ม Servo Driver เสมอ
41
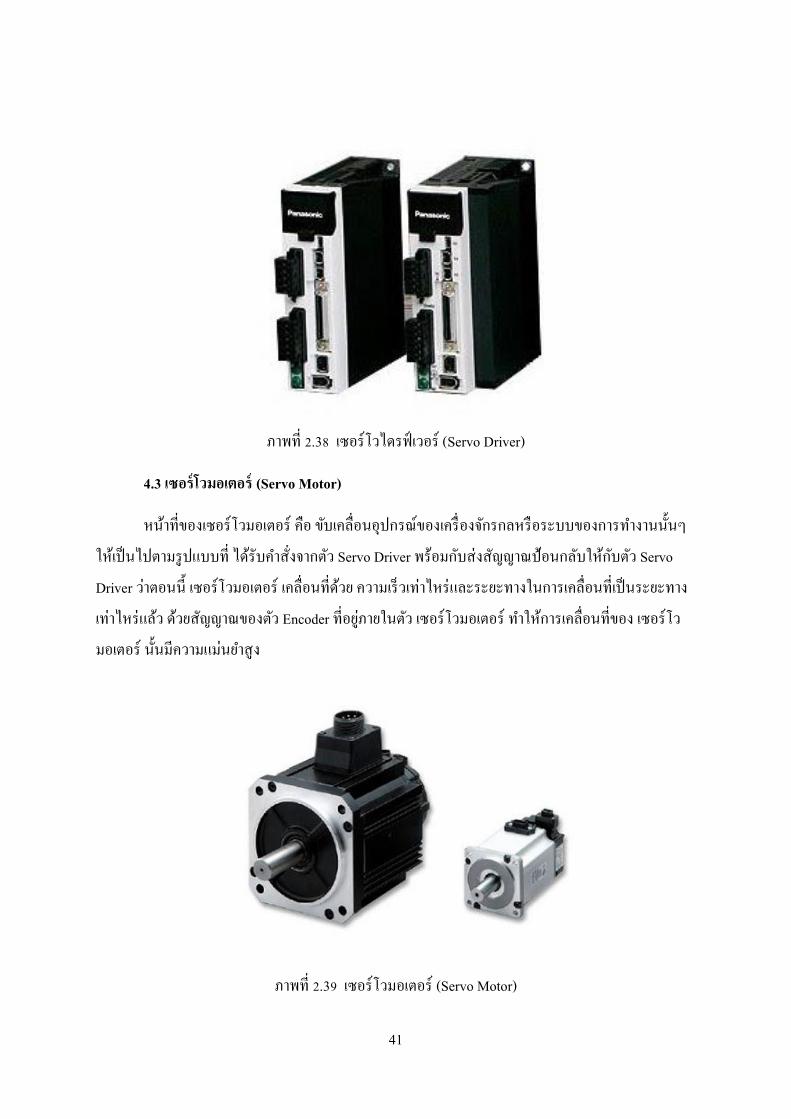
ภาพท 2.38 เซอรโวไดรฟเวอร (Servo Driver)
4.3 เซอรโวมอเตอร (Servo Motor)
หนาทของเซอรโวมอเตอร คอ ขบเคลอนอปกรณของเครองจกรกลหรอระบบของการท างานนนๆ
ใหเปนไปตามรปแบบท ไดรบค าสงจากตว Servo Driver พรอมกบสงสญญาณปอนกลบใหกบตว Servo
Driver วาตอนน เซอรโวมอเตอร เคลอนทดวย ความเรวเทาไหรและระยะทางในการเคลอนทเปนระยะทาง
เทาไหรแลว ดวยสญญาณของตว Encoder ทอยภายในตว เซอรโวมอเตอร ท าใหการเคลอนทของ เซอรโว
มอเตอร นนมความแมนย าสง
ภาพท 2.39 เซอรโวมอเตอร (Servo Motor)

42
ดวยองคประกอบขางตนทงหมดทงมวลนน พอจะท าใหผทจะใชงานหรอผทก าลงศกษา พอทจะมองภาพ
ของการ ท างานของระบบ เซอรโวมอเตอร วาองคประกอบของระบบหรอการทจะใชงาน เซอรโว
มอเตอร นนตองมองคประกอบอะไรบางจงจะใชงาน เซอรโวมอเตอร ไดอยางถกตองและมประสทธภาพ
2.8 สเตปปงมอเตอร (Stepping Motor)
สเตปปงมอเตอรเปนอปกรณเอาตพตอยางหนง ซงสามารถน าไอซไมโครคอนโทรลเลอร มาท าการ
ควบคมไดสะดวก และเปนมอเตอรทเหมาะสมส าหรบใชในงานควบคมการหมน ทตองการต าแหนง และ
ทศทางทแนนอน การท างานของ สเตปปงมอเตอรจะขบเคลอนทละขนๆ ละ ( Step) 0.9, 1.8, 5, 7.5, 15 หรอ
50 องศา ซงขนอยกบคณสมบตแตละชนดของสเตปปงมอเตอรตวนนๆ สเตปปงมอเตอรจะแตกตางจาก
มอเตอรกระแสตรงทวไป ( DC MOTOR ) โดยการท างานของมอเตอรกระแสตรงจะหมนไปแบบตอเนอง
ไมสามารถหมนเปนแบบสเตปๆ ไดดงนนในการน าไปก าหนดต าแหนงจงควบคมไดยากกวา แตในสวน
ใหญเราจะใชสเตปปงมอเตอรมาท าการการควบคมโดยใชวธในระบบดจตอล เชน พรนเตอร ( Printer )
พลอตเตอร ( X-Y Plotter ) ดสกไดรฟ ( Disk drive ) ฯลฯ
คณสมบตเดนของสเตปปงมอเตอร
- มมในการหมน (rotation angle) มคาตามสดสวนของจ านวนของพลสอนพตทใชขบมอเตอร
- ความเรวในการหมน (rotation speed) มคาตามสดสวนและสมพนธกบความถของสญญาณพลส
อนพตทใชขบมอเตอร
- ใชในการควบคมต าแหนงแบบระบบเปดทมความแมนย าสง โดยไมมตองใชสญญาณปอนกลบของ
การก าหนดต าแหนง
- ไมมความผดพลาดสะสมของการก าหนดต าแหนง
- เหมาะกบงานทตองการกลไกเคลอนทความเรวต า แรงบดสง โดยไมตองใชระบบเฟองทดรอบ
เพมเตม
- สามารถก าเนดและรกษาแรงบดไดในทนททมอเตอรถกกระตนใหท างาน
- สามารถรกษาสภาวะการหมนของแกนไดโดยไมท าใหมอเตอรเสยหาย
- ไมมแปรงถาน ท าใหมอายการใชงานทยาวนาน
- มลกปนความเทยงตรงสง เพอชวยการหมนของแกนมความแมนย า
ขอดอยของสเตปปงมอเตอร

43
- การก าทอนหรอการเกดเรโซแนนซท าใหไมสามารถควบคมการท างานของสเตปปงมอเตอรได
- การท าใหมอเตอรสามารถหมนแกนดวยความเรวสงท าไดยาก
- หากเกดแรงบดสงสงเกนกวาทรบไดหรอเกดโอเวอรทอรกมอเตอรจะสญเสยการรบรต าแหนงของ
แกนหมน จะตองกลบไปเรมตนการอนเชยลใหม
- ใหแรงบดทนอยกวามอเตอรไฟตรงและมอเตอรไฟสลบทขนาดของตวมอเตอรเทากน
สเตปปงมอเตอรเปนมอเตอรทมลกษณะการท างานแตกตางจากมอเตอรทวไป เพราะจะตองปอน
สญญาณเปนพลสใหแกขดลวดของมอเตอรเปนจงหวะอยางเหมาะสม และการหมนของมอเตอรชนดนจะ
หมนเปนจงหวะตามพลสทปอนเขามา หากมการปอนสญญาณพลสตอเนอง มอเตอรกจะสามารถหมนได
อยางตอเนองเหมอนกบมอเตอรไฟตรงปกต ดงนนดวยจงหวะในการปอนสญญาณพลสจงท าใหผควบคม
สามารถเลอกต าแหนงทตองการใหมอเตอรหยดหมนได
จงหวะการหมนของสเตปปงมอเตอรเรยกวา สเตป (step) นนจงเปนทมาของชอของมอเตอรชนดน
ความละเอยดของมอเตอรก าหนดเปนองศาทหมนไปในหนงสเตป หากมอเตอรมจ านวนองศาตอสเตปมาก
หมายความวา มอเตอรตวนมความละเอยดของการหมนต า ยกตวอยาง การหมนครบ 1 รอบเทากบ 360
องศา หากมอเตอรมสเตปการหมนเทากบ 7.5 องศาตอสเตป มอเตอรตวนมความละเอยดของการหมน
เทากบ 48 ต าแหนง แตถาหากมสเตปการหมนกบ 1.8 องศาตอสเตป ความละเอยดของการหมนเทากบ 200
จะเหนไดวามอเตอรตวหลงมความละเอยดสงกวาตวแรกมาก ท าใหน ามาใชในงานทตองการก าหนด
ต าแหนงไดดกวา แมนย ากวา ผนวกเขากบวงจรขบแบบครงสเตป ความละเอยดของการหมนจะเพมขนอก 2
เทา ท าใหมความละเอยดของการหมนกลายเปน 400 ต าแหนง
ขนาดของสเตปปงมอเตอรทมการผลตและจ าหนายในทองตลาด มตงแตขนาดแรงดนต า 3V ไป
จนถง 24V และ 48V สวนขนาดของกระแสมตงแตไมกสบมลลแอมปอนเปนสเตปปงมอเตอรตวเลกไป
จนถงเปนสบแอมป ซงมขนาดของมอเตอรใหญโตขนตามล าดบ
ชนดของสเตปปงมอเตอร
ในอดตมการแบงชนดของสเตปปงมอเตอรตามลกษณะโครงสรางซงแบงไดเปน 3 ชนดคอ แบบ
แมเหลกถาวรหรอ PM (Permanent Magnet), แบบปรบคาความตานทานแมเหลกไดหรอ VR (Variable
Reluctance) และแบบผสมหรอไฮบรด (Hybrid) ซงเปนการผสมกนระหวางแบบ PM และ VR ในปจจบนน
สเตปปงมอเตอรสวนใหญเปนแบบไฮบรด เนองจากสามารถท าใหมความละเอยดในการเคลอนทของแกน
ไดสงถง 0.9 องศาตอสเตป (ซงเปนขอดของแบบ VR) และใหแรงบดหรอทอรกทสง โดยใชพลงงานต า
(เปนขอดของแบบ PM) ในรปท 2.8.1 แสดงโครงสรางอยางงายของสเตปปงมอเตอรแบบไฮบรด
44
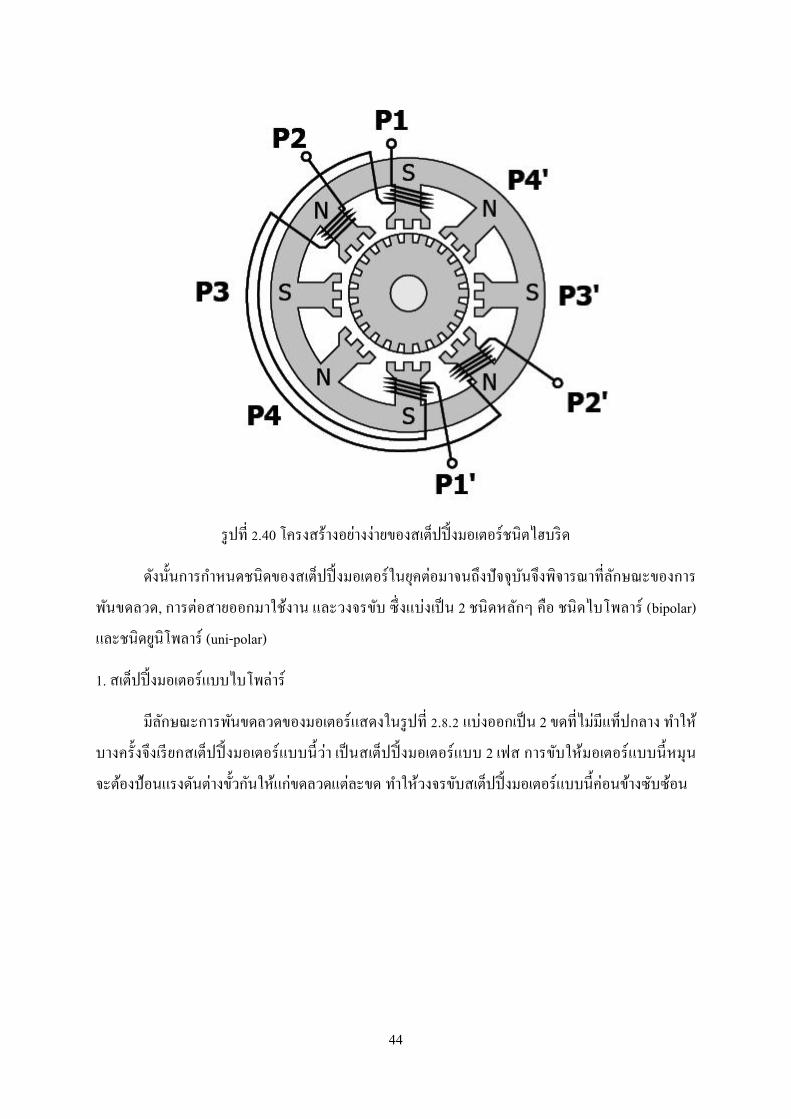
รปท 2.40 โครงสรางอยางงายของสเตปปงมอเตอรชนตไฮบรด
ดงนนการก าหนดชนดของสเตปปงมอเตอรในยคตอมาจนถงปจจบนจงพจารณาทลกษณะของการ
พนขดลวด, การตอสายออกมาใชงาน และวงจรขบ ซงแบงเปน 2 ชนดหลกๆ คอ ชนดไบโพลาร (bipolar)
และชนดยนโพลาร (uni-polar)
1. สเตปปงมอเตอรแบบไบโพลาร
มลกษณะการพนขดลวดของมอเตอรแสดงในรปท 2.8.2 แบงออกเปน 2 ขดทไมมแทปกลาง ท าให
บางครงจงเรยกสเตปปงมอเตอรแบบนวา เปนสเตปปงมอเตอรแบบ 2 เฟส การขบใหมอเตอรแบบนหมน
จะตองปอนแรงดนตางขวกนใหแกขดลวดแตละขด ท าใหวงจรขบสเตปปงมอเตอรแบบนคอนขางซบซอน
45
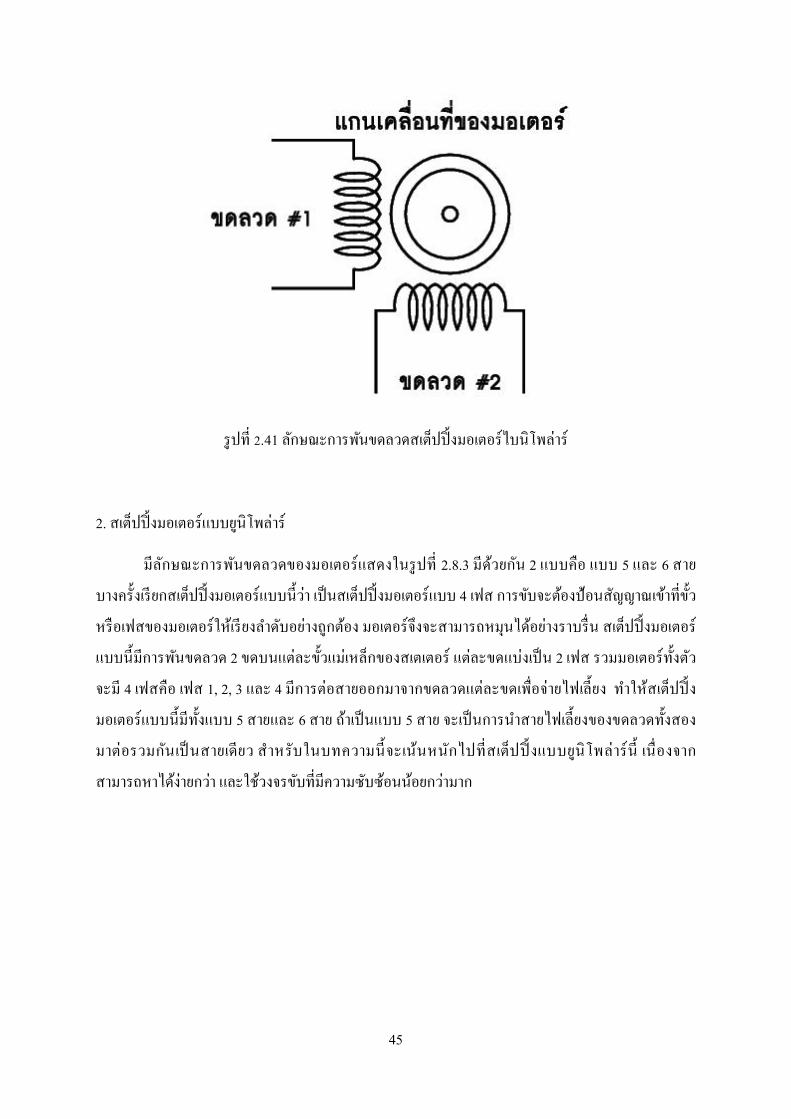
รปท 2.41 ลกษณะการพนขดลวดสเตปปงมอเตอรไบนโพลาร
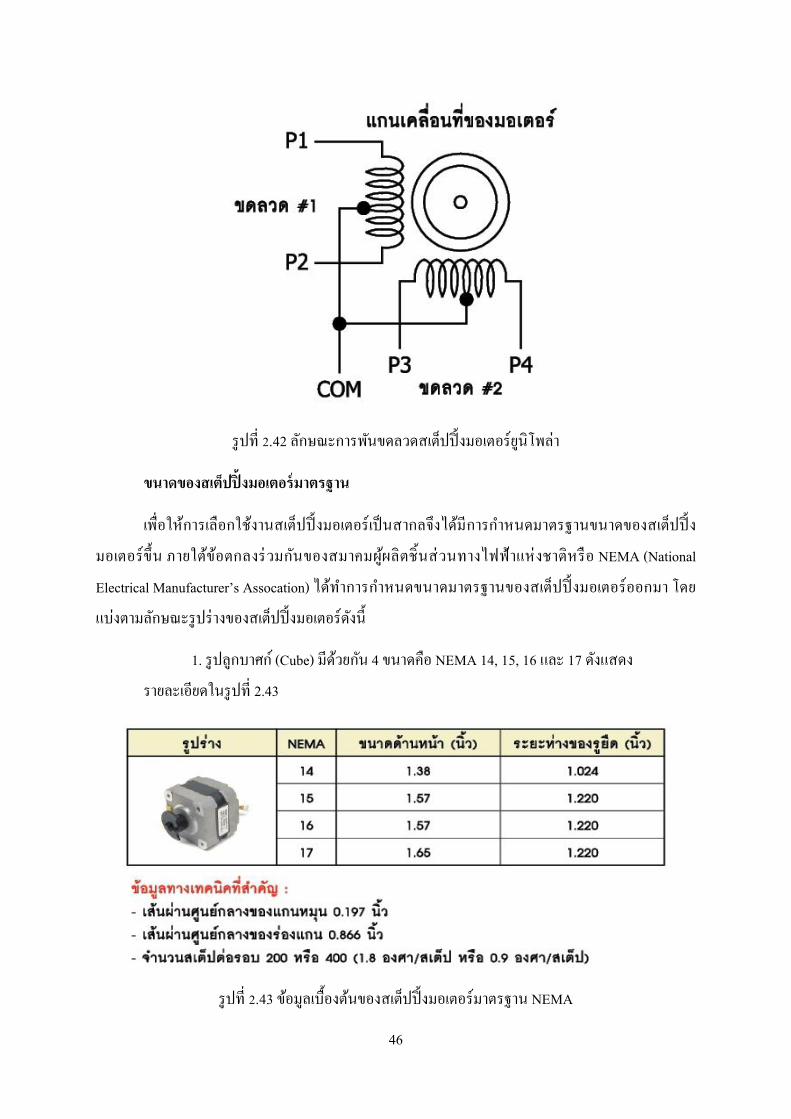
2. สเตปปงมอเตอรแบบยนโพลาร
มลกษณะการพนขดลวดของมอเตอรแสดงในรปท 2.8.3 มดวยกน 2 แบบคอ แบบ 5 และ 6 สาย
บางครงเรยกสเตปปงมอเตอรแบบนวา เปนสเตปปงมอเตอรแบบ 4 เฟส การขบจะตองปอนสญญาณเขาทขว
หรอเฟสของมอเตอรใหเรยงล าดบอยางถกตอง มอเตอรจงจะสามารถหมนไดอยางราบรน สเตปปงมอเตอร
แบบนมการพนขดลวด 2 ขดบนแตละขวแมเหลกของสเตเตอร แตละขดแบงเปน 2 เฟส รวมมอเตอรทงตว
จะม 4 เฟสคอ เฟส 1, 2, 3 และ 4 มการตอสายออกมาจากขดลวดแตละขดเพอจายไฟเลยง ท าใหสเตปปง
มอเตอรแบบนมทงแบบ 5 สายและ 6 สาย ถาเปนแบบ 5 สาย จะเปนการน าสายไฟเลยงของขดลวดทงสอง
มาตอรวมกนเปนสายเดยว ส าหรบในบทความนจะเนนหนกไปทสเตปปงแบบยนโพลารน เนองจาก
สามารถหาไดงายกวา และใชวงจรขบทมความซบซอนนอยกวามาก
46
รปท 2.42 ลกษณะการพนขดลวดสเตปปงมอเตอรยนโพลา
ขนาดของสเตปปงมอเตอรมาตรฐาน
เพอใหการเลอกใชงานสเตปปงมอเตอรเปนสากลจงไดมการก าหนดมาตรฐานขนาดของสเตปปง
มอเตอรขน ภายใตขอตกลงรวมกนของสมาคมผผลตชนสวนทางไฟฟาแหงชาตหรอ NEMA (National
Electrical Manufacturer’s Assocation) ไดท าการก าหนดขนาดมาตรฐานของสเตปปงมอเตอรออกมา โดย
แบงตามลกษณะรปรางของสเตปปงมอเตอรดงน
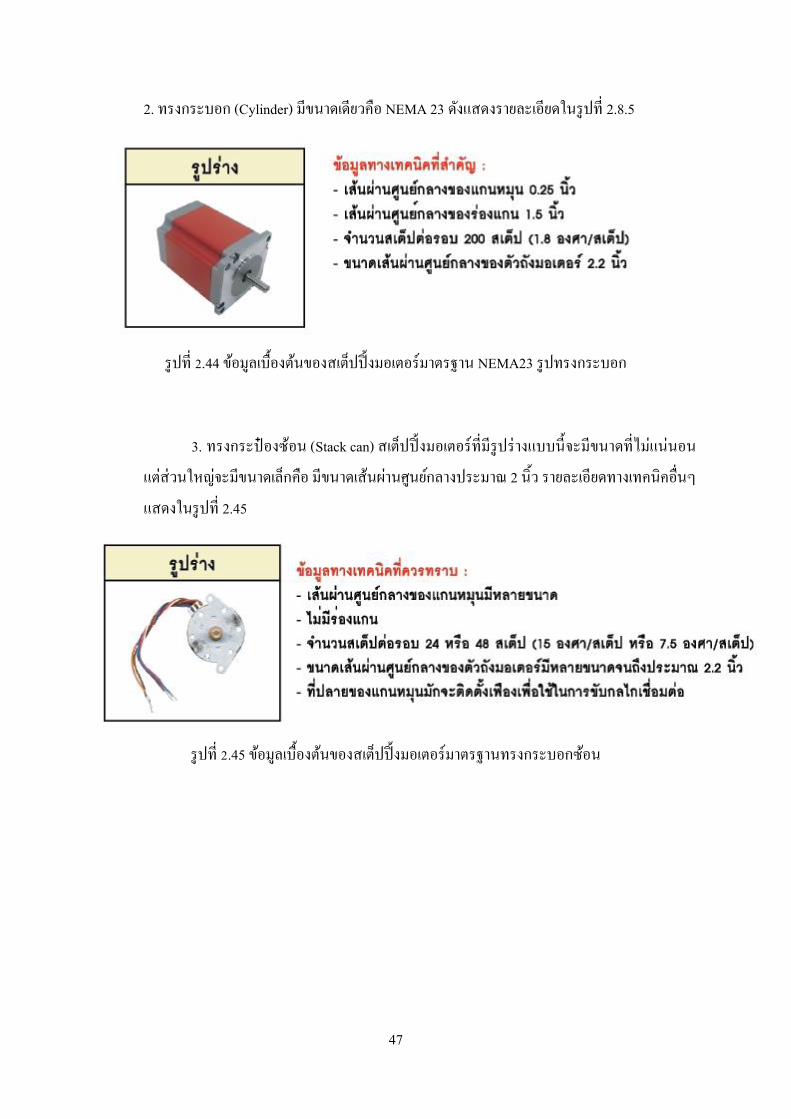
1. รปลกบาศก (Cube) มดวยกน 4 ขนาดคอ NEMA 14, 15, 16 และ 17 ดงแสดง
รายละเอยดในรปท 2.43
รปท 2.43 ขอมลเบองตนของสเตปปงมอเตอรมาตรฐาน NEMA
47
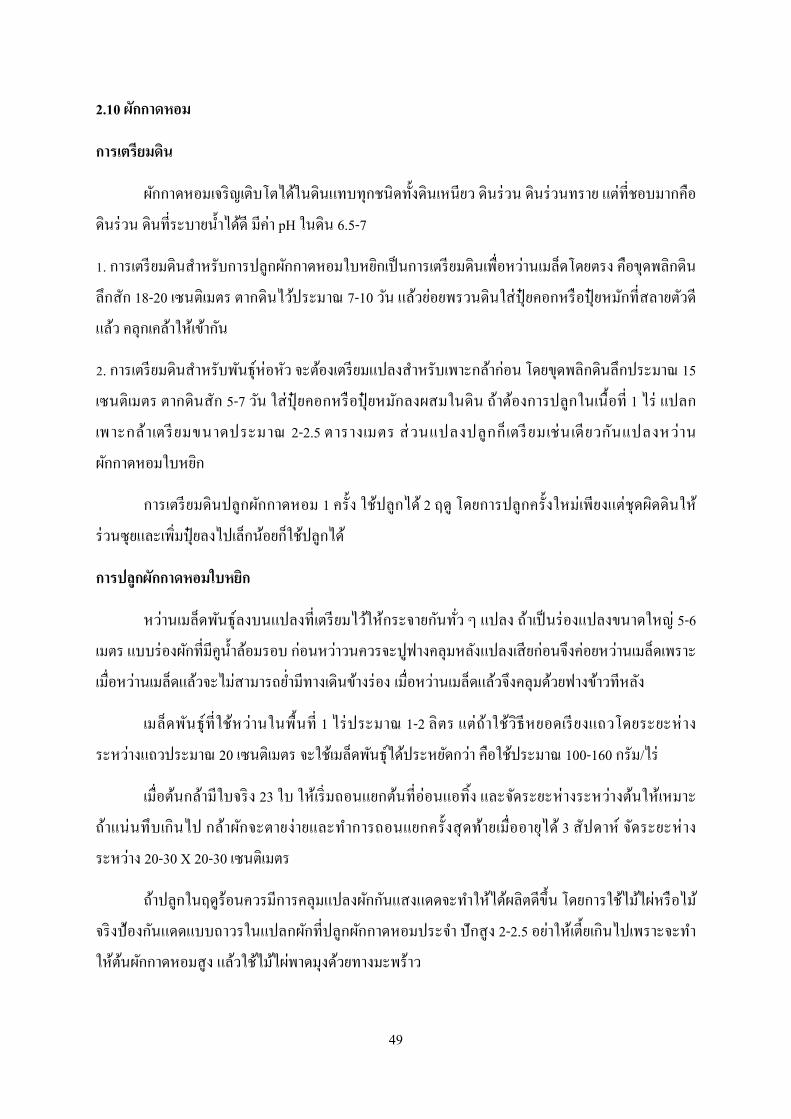
2. ทรงกระบอก (Cylinder) มขนาดเดยวคอ NEMA 23 ดงแสดงรายละเอยดในรปท 2.8.5
รปท 2.44 ขอมลเบองตนของสเตปปงมอเตอรมาตรฐาน NEMA23 รปทรงกระบอก
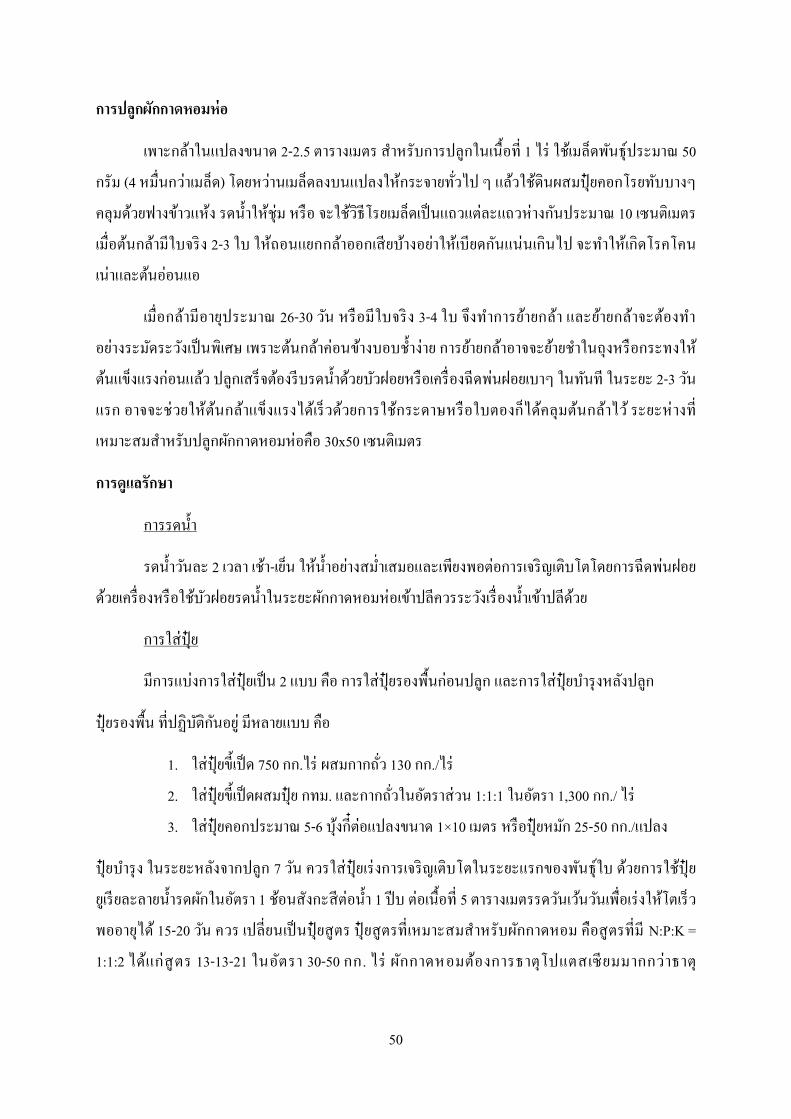
3. ทรงกระปองซอน (Stack can) สเตปปงมอเตอรทมรปรางแบบนจะมขนาดทไมแนนอน
แตสวนใหญจะมขนาดเลกคอ มขนาดเสนผานศนยกลางประมาณ 2 นว รายละเอยดทางเทคนคอนๆ
แสดงในรปท 2.45
รปท 2.45 ขอมลเบองตนของสเตปปงมอเตอรมาตรฐานทรงกระบอกซอน

48
2.9 เครอง/ตวก าเนดสญญากาศ (Vacuum Ejector, Vacuum Generator)
ตวก าเนดสญญากาศอาศยหลกการทท าใหเกดสญญากาศตรงบรเวณคอคอดทเปนเสมอนทอ 3 แยก
เวนจรทอยภายในตวก าเนดความดนสญญากาศตวอเจกเตอรโดยบรเวณนเหมอนทาง 3 แพรงในรปขางลาง
ลมเขามาทางรท 1 และ เมอลมไหลเขามาเรวในคอขาด ของตวก าเนดความดนสญญากาศเชน พนทหนาตดท
ลมไหลผานลดลง 900% ความเรวลมจะมากขน 900% เชนกน พนทลดลง 9 เทา ความเรวลมทเพมขน 9 เทา
ท าใหลมทไหลผานทเวนจรจะปนปวนอยางมาก (Turbulence) โดยลมจะไหลออกอยางรวดเรวไปสรออกท
2 ซงมขนาดใหญทอยตรงขามกบทางเขาท1 บรเวณทาง 3 แพรง ทอยภายในเวนจรกจะเกดสญญากาศ ดด
อากาศจากทางเขาท 3 ทอทางเขาท 3 จะไปตอกบลกยางดดจบชนงาน ฯลฯ ในงานจบและวาง
เครองก าเนดความดนสญญากาศทตองการปรมาณลมดดมากๆไมเหมาะทจะใชอเจกเตอรตองใช
เปนปมสญญากาศ ซงมทงแบบกระบอกสบ แบบโรตาร แบบ Vane Type เปนตน
รปท 2.46 ภาพลกษณะการท างานของตวก าเนดสญญากาศ
49
2.10 ผกกาดหอม
การเตรยมดน
ผกกาดหอมเจรญเตบโตไดในดนแทบทกชนดทงดนเหนยว ดนรวน ดนรวนทราย แตทชอบมากคอ
ดนรวน ดนทระบายน าไดด มคา pH ในดน 6.5-7
1. การเตรยมดนส าหรบการปลกผกกาดหอมใบหยกเปนการเตรยมดนเพอหวานเมลดโดยตรง คอขดพลกดน
ลกสก 18-20 เซนตเมตร ตากดนไวประมาณ 7-10 วน แลวยอยพรวนดนใสปยคอกหรอปยหมกทสลายตวด
แลว คลกเคลาใหเขากน
2. การเตรยมดนส าหรบพนธหอหว จะตองเตรยมแปลงส าหรบเพาะกลากอน โดยขดพลกดนลกประมาณ 15
เซนตเมตร ตากดนสก 5-7 วน ใสปยคอกหรอปยหมกลงผสมในดน ถาตองการปลกในเนอท 1 ไร แปลก
เพาะกลาเตรยมขนาดประมาณ 2-2.5 ตารางเมตร สวนแปลงปลกกเตรยมเชนเดยวกนแปลงหวาน
ผกกาดหอมใบหยก
การเตรยมดนปลกผกกาดหอม 1 ครง ใชปลกได 2 ฤด โดยการปลกครงใหมเพยงแตชดผดดนให
รวนซยและเพมปยลงไปเลกนอยกใชปลกได
การปลกผกกาดหอมใบหยก
หวานเมลดพนธลงบนแปลงทเตรยมไวใหกระจายกนทว ๆ แปลง ถาเปนรองแปลงขนาดใหญ 5-6
เมตร แบบรองผกทมคน าลอมรอบ กอนหวาวนควรจะปฟางคลมหลงแปลงเสยกอนจงคอยหวานเมลดเพราะ
เมอหวานเมลดแลวจะไมสามารถย ามทางเดนขางรอง เมอหวานเมลดแลวจงคลมดวยฟางขาวทหลง
เมลดพนธทใชหวานในพนท 1 ไรประมาณ 1-2 ลตร แตถาใชวธหยอดเรยงแถวโดยระยะหาง
ระหวางแถวประมาณ 20 เซนตเมตร จะใชเมลดพนธไดประหยดกวา คอใชประมาณ 100-160 กรม/ไร
เมอตนกลามใบจรง 23 ใบ ใหเรมถอนแยกตนทออนแอทง และจดระยะหางระหวางตนใหเหมาะ
ถาแนนทบเกนไป กลาผกจะตายงายและท าการถอนแยกครงสดทายเมออายได 3 สปดาห จดระยะหาง
ระหวาง 20-30 X 20-30 เซนตเมตร
ถาปลกในฤดรอนควรมการคลมแปลงผกกนแสงแดดจะท าใหไดผลตดขน โดยการใชไมไผหรอไม
จรงปองกนแดดแบบถาวรในแปลกผกทปลกผกกาดหอมประจ า ปกสง 2-2.5 อยาใหเตยเกนไปเพราะจะท า
ใหตนผกกาดหอมสง แลวใชไมไผพาดมงดวยทางมะพราว
50
การปลกผกกาดหอมหอ
เพาะกลาในแปลงขนาด 2-2.5 ตารางเมตร ส าหรบการปลกในเนอท 1 ไร ใชเมลดพนธประมาณ 50
กรม (4 หมนกวาเมลด) โดยหวานเมลดลงบนแปลงใหกระจายทวไป ๆ แลวใชดนผสมปยคอกโรยทบบางๆ
คลมดวยฟางขาวแหง รดน าใหชม หรอ จะใชวธโรยเมลดเปนแถวแตละแถวหางกนประมาณ 10 เซนตเมตร
เมอตนกลามใบจรง 2-3 ใบ ใหถอนแยกกลาออกเสยบางอยาใหเบยดกนแนนเกนไป จะท าใหเกดโรคโคน
เนาและตนออนแอ
เมอกลามอายประมาณ 26-30 วน หรอมใบจรง 3-4 ใบ จงท าการยายกลา และยายกลาจะตองท า
อยางระมดระวงเปนพเศษ เพราะตนกลาคอนขางบอบช างาย การยายกลาอาจจะยายช าในถงหรอกระทงให
ตนแขงแรงกอนแลว ปลกเสรจตองรบรดน าดวยบวฝอยหรอเครองฉดพนฝอยเบาๆ ในทนท ในระยะ 2-3 วน
แรก อาจจะชวยใหตนกลาแขงแรงไดเรวดวยการใชกระดาษหรอใบตองกไดคลมตนกลาไว ระยะหางท
เหมาะสมส าหรบปลกผกกาดหอมหอคอ 30x50 เซนตเมตร
การดแลรกษา
การรดน า
รดน าวนละ 2 เวลา เชา-เยน ใหน าอยางสม าเสมอและเพยงพอตอการเจรญเตบโตโดยการฉดพนฝอย
ดวยเครองหรอใชบวฝอยรดน าในระยะผกกาดหอมหอเขาปลควรระวงเรองน าเขาปลดวย
การใสปย
มการแบงการใสปยเปน 2 แบบ คอ การใสปยรองพนกอนปลก และการใสปยบ ารงหลงปลก
ปยรองพน ทปฏบตกนอย มหลายแบบ คอ
1. ใสปยขเปด 750 กก.ไร ผสมกากถว 130 กก./ไร
2. ใสปยขเปดผสมปย กทม. และกากถวในอตราสวน 1:1:1 ในอตรา 1,300 กก./ ไร
3. ใสปยคอกประมาณ 5-6 บงกตอแปลงขนาด 1×10 เมตร หรอปยหมก 25-50 กก./แปลง
ปยบ ารง ในระยะหลงจากปลก 7 วน ควรใสปยเรงการเจรญเตบโตในระยะแรกของพนธใบ ดวยการใชปย
ยเรยละลายน ารดผกในอตรา 1 ชอนสงกะสตอน า 1 ปบ ตอเนอท 5 ตารางเมตรรดวนเวนวนเพอเรงใหโตเรว
พออายได 15-20 วน ควร เปลยนเปนปยสตร ปยสตรทเหมาะสมส าหรบผกกาดหอม คอสตรทม N:P:K =
1:1:2 ไดแกสตร 13-13-21 ในอตรา 30-50 กก. ไร ผกกาดหอมตองการธาตโปแตสเซยมมากกวาธาต

51
ไนโตรเจนธาตโปแตสเซยมท าใหใบผกกาดบางกรอบ ไมมรอยจดบนใบ ผกกาดหอมทไดธาตไนโตรเจน
มากเกนไปจะท าใหใบมสเขยวรสไมอรอย
โรคและแมลง
ผกกาดหอมเปนผกทไมคอยมแมลงศตรรบกวน จงไมจ าเปนตองฉดยาฆาแมลง แมลงศตรทพบบาง
กมเพลย กบหนอนกระทหอม ซงพบมากในฤดหนาวแถวภาคกลางและภาคเหนอ
การเกบเกยว
อายการเกบเกยวผกกาดหอมพนธใบหยกประมาณ 40-50 วน หลงจากหวานเมลดลงแปลงแลว การ
เกบเลอกเกบขณะใบยงออนอยกรอบ ไมเหนยวกระดาง ตนแกจะมรสขม ตนจะสงประมาณ 20-25
เซนตเมตร ใชมดตดตรงโคนตน ตดแตงใบเสยทง ชบน าเพอลางยาสขาวออกสลดน าใหหมด มฉะนนจะเนา
เสยไดงายถามน าขงอย แลวจดเรยงใสเขงทรองกนดวยใบตองหรอใบไมอนๆ ผลผลตตอไรจะไดประมาณ
1,100 – 3,000 กวากโลกรม
2.11 ผกคะนา
การปลกคะนา
การเพาะปลก การปลกคะนา
การเพาะกลา
1. การเตรยมแปลงเพาะ แปลงเพาะกลาควรมขนาดกวาง 1 เมตร สวนความยาวตามความเหมาะสม
2. การเตรยมดนบนแปลงเพาะกลา ควรขดไถพรวนดนอยางด ตากดนไวประมาณ 5-7 วน ยอยหนาดน ให
ละเอยด แลวใสปยคอกหรอปยหมกทสลายตวดแลวใหมาก คลกเคลาใหเขากบดนใหทว
3. การเพาะ หวานเมลดใหกระจายสม าเสมอทวแปลง กลบเมลดดวยดนหรอปยคอกทสลายตวดแลวใหหนา
ประมาณ 0.6-1 เซนตเมตร คลมดวยฟางหรอหญาแหงบางๆ รดน าใหชมดวยบวรดน า
4. การดแลตนกลา ตนกลาจะงอกภายใน 7 วน ควรดแลตนกลา ถอนตนทออนแอ ไมแขงแรง หรอเบยดกน
แนนทงไป ผสมสารละลายสตารทเตอรโวลชนในน าแลวน าไปรด เพอใหตนกลาแขงแรงสมบรณ ดแล
ปองกนโรคแมลงทเกดขน เมอตนกลามอายประมาณ 25-30 วน จงท าการยายไปปลกในแปลงปลกตอไป
วธการปลก
การปลกคะนานยมปลก 2 แบบ คอ
1. แบบหวานกระจายทวแปลง เหมาะส าหรบแปลงปลกขนาดใหญ ท าเปนการคา

52
2. แบบแถวเดยว เหมาะส าหรบแปลงปลกขนาดเลกหรอผกสวนครว เตรยมดนโดยการใชแรงงานคนใหน า
โดยใชบวรดน า
ระยะปลก ควรใหมระยะปลกระหวางตนและระหวางแถวประมาณ 20 X 20 เซนตเมตร
การเตรยมแปลงปลก มวธการดงน
1. ขดดนใหลกประมาณ 15-20 เซนตเมตร
2. ตากดนทงไวประมาณ 7-10 วน
3. น าปยคอกหรอปยหมกทสลายตวดแลวมาใส คลกเคลาใหเขากบดนเปนการปรบปรงสภาพทางกายภาพ
และเพมความอดม สมบรณของดน
4. พรวนยอยหนาดนใหมขนาดเลก โดยเฉพาะการปลกแบบหวานลงในแปลง เพอไมใหเมลดตกลงไปใน
ดน เพราะจะไมงอกหรองอกยากมาก
5. ถาดนเปนกรดควรใสปนขาวเพอปรบปรงดนใหอยในสภาพทเหมาะสม
ในการปลกคะนานยมหวานเมลดลงบนแปลงปลกโดยตรงมากกวายายกลา โดยมขนตอนดงน
1. หวานเมลดใหกระจายทวทงผวแปลงโดยใหเมลดหางกนประมาณ 2-3 เซนตเมตร
2. ใชดนผสมหรอปยคอกทสลายตวดแลวหวานกลบเมลดใหหนาประมาณ 0.6-1 เซนตเมตร เพอเกบรกษา
ความชนและปองกนเมลดถกน ากระแทกกระจาย
3. คลมดวยฟางหรอหญาแหงบางๆ
4. รดน าใหทวถงและสม าเสมอ ตนกลาจะงอกภายใน 7 วน
5. หลงจากตนคะนางอกแลวประมาณ 20 วน หรอตนสงประมาณ 10 เซนตเมตร ใหเรมถอนแยก โดยเลอก
ตนทไมสมบรณออก ทงระยะหางระหวางตนประมาณ 10 เซนตเมตร ตนออนของคะนาทถอนแยกออกมา
ในวยนเมอเดดรากออกแลวสงขายตลาดเปน ยอดผกได
6. เมอคะนามอายประมาณ 30 วน ใหถอนแยกครงท 2 ใหเหลอระยะหางระหวางตน 20 เซนตเมตรตนออน
ของคะนาทถอนแยกออกมาในวยนเมอเดดรากออก แลวสงขายตลาดเปนยอดผกได
7. ในการถอนแยกคะนาแตละครงควรก าจดวชพชไปดวย
การใหน า
1. คะนาตองการน าอยางเพยงพอและสม าเสมอ เนองจากมการเจรญเตบโตอยางรวดเรว ดงนนควรปลกใน
แหลงทมน าอยางเพยงพอ
2. การใหน าใหใชฝกบวฝอยรดใหทวและใหชม ในเวลาเชาและเยน
53
การใสปย
คะนาตองการปยทมธาตไนโตรเจนสง อาจใสปยสตร 12-8-8 หรอ 20-11-11 ในอตราประมาณ 100 กโลกรม
ตอไร ทงนขนอยกบความอดมสมบรณของดนและปรมาณปยคอกทใชโดยแบงใส 2 ครง คอ หลงจากถอน
แยกครงแรกและหลงจากถอนแยกครงท 2
การเกบเกยวผลผลต
อายการเกบเกยวของคะนาอยทประมาณ 45-55 วนหลงปลก คะนาทตลาดตองการมากทสดคอ คะนาทมอาย
45 วน แตคะนาทมอาย 50-55 วน เปนระยะทเกบเกยวไดน าหนกมากกวา วธการเกบเกยวคะนาท าไดดงน
1. ใชมดคมๆ ตดใหชดโคนตน
2. ตดไลเปนหนากระดานไปตลอดทงแปลง
3. หลงตดแลวบางแหงมดดวยเชอกกลวยมดละ 5 กโลกรม บางแหงกบรรจเขง แลวแตความสะดวกในการ
ขนสง
การเกบเกยวคะนาใหไดคณภาพด รสชาตด และสะอาด ควรปฏบตดงน
1. เกบในเวลาเชาดกวาเวลาบาย
2. ใชมดเลกๆ ตด อยาเกบหรอเดดดวยมอ
3. อยาปลอยใหผกแกเกนไป
4. หลงเกบเกยวเสรจควรน าผกเขาทรม วางในทโปรงและอากาศเยน
5. ภาชนะทบรรจผกควรสะอาด
2.12 ผกกวางตง
การปลกกวางตง
การเพาะปลก การปลกกวางตง
เนองจากผกกาดเขยวกวางตงเปนผกทมระบบรากตน ดงนนในการเตรยมดนควรขดไถดนใหลก
ประมาณ 15-20 เซนตเมตร แลวท าการตากดนทงไวประมาณ 5-7 วน ใสปยคอกหรอปยหมกทยอยสลายตว
แลวใหมาก คลกเคลาใหเขากนด แลวท าการไถพรวนใหดนละเอยด ในกรณทดนมสภาพเปนกรดกควรใส
ปนขาวเพอปรบระดบ pH ของดนใหเหมาะสม ขนาดของแปลงปลกกวาง 1 เมตร ยาวประมาณ 10 เมตร
หรอ ตามความเหมาะสม

54
การปลก
ในการปลกผกกาดเขยวกวางตงนยมท ากน 2 วธดวยกน คอ
1. การปลกแบบหวานเมลดโดยตรง วธนนยมใชในการปลกแปลงทยกรอง มรองน ากวาง และพนทควรม
การเตรยมอยางด และเปนดนทมความอดมสมบรณ เนองจากเมลดพนธผกกาดเขยวกวางตงมขนาดเลกมาก
ดงนนกอนหวานควรผสมกบทรายเสยกอน โดยใชเมลดพนธ 1 สวนผสมกบทรายสะอาด 3 สวน แลวหวาน
ใหกระจายทวแปลงสม าเสมอแลวหวานกลบดวยปยคอกหรอปยหมกหนาประมาณ 1/2-1 เซนตเมตร
หลงจากนนคลมดวยฟางขาวบางๆ เพอชวยเกบรกษาความชมชนในดน เสรจแลวรดน าใหชมหลงจากงอก
ไดประมาณ 20 วน ควรท าการถอนและจดใหมระยะระหวางตน 20-25 เซนตเมตร
2. การปลกแบบโรยเมลดเปนแถว การปลกวธนหลงจากเตรยมดนแลวจงท ารองลกประมาณ 1.5-2
เซนตเมตร ใหเปนแถวโดยใหระยะระหวางแถวหางกน 20-25 เซนตเมตร น าเมลดพนธผสมกบทราย แลวท า
การโรยหรอหยอดเมลดเปนแถวตามรอง แลวกลบดวยปยคอกหรอปยหมกบางๆ คลมดวยฟางขาวบางๆ รด
น าใหชมดวยสม าเสมอ หลงจากปลกไดประมาณ 20 วน หรอตนกลามใบ 4-5 ใบ จงท าการถอนแยกในแถว
โดยพยายามจดระยะระหวางตนใหหางกนประมาณ 20-25 เซนตเมตร ใหเหลอหลมละ 1 ตน
การดแลรกษา
การใหน า เนองจากผกกาดเขยวกวางตงเปนผกทตองการน ามาก และมการเจรญเตบโตอยางรวดเรว
ดงนนเกษตรกรจะตองใหน าอยางพงพอและสม าเสมอ อยางนอยวนละ 1 ครง โดยใชระบบพนฝอยหรอใช
สายยางตดหวฝกบว อยาใหผกกาดเขยวกวางตงขาดน าในระยะการเจรญเตบโต เพราะจะท าใหผกกาดเขยว
กวางตงชะงกการเจรญเตบโตได
การใสปย เนองจากผกกาดเขยวกวางตงเปนผกกนใบและกานใบ ดงนนการใสปยควรใชปยยเรย
(46-0-0) หรอแอมโมเนยมซลเฟต อตรา 30 กโลกรมตอไร เปนการเรงการเจรญเตบโตทางใบและกานใบให
เรวขน หรอใชปยสตร 20-11-11 หรอสตรใกลเคยง ในอตรา 30-50 กโลกรมตอไร หลงจากใสปยทกครงควร
มการราดน าตามทนท อยาใหปยตกคาง
ส าหรบการพรวนดนและก าจดวชพช ควรท าใหระยะแรกพรอมกบการถอนแยก
การเกบเกยว

55
อายการเกบเกยวของผกกาดเขยวกวางตงคอนขางเรว คอ ประมาณ 35-45 วน การเกบเกยวโดยเลอก
ตนทมขนาดใหญตามตองการ แลวใชมดคมๆ ตดทโคนตนแลวท าการตดแตงใบนอกทแกหรอใบทถกโรค
หรอแมลงท าลายออก หลงจากตดแตงแลวจงบรรจภาชนะเพอสงจ าหนายตลาดตอไป
ส าหรบการเกบรกษา เนองจากผกกาดเขยวกวางตงเปนผกอวบน า ดงนนการเกบรกษาจงควรเกบไว
ในทอณหภมต าประมาณศนยองศาเซลเซยสทความชนสมพทธ 95 เปอรเซนต จะสามารถเกบรกษาไวได
นานถง 3 สปดาห
โรคและแมลง
โรคและแมลงทเขาท าลายผกกาดเขยวกวางตงสวนใหญเปนชนดเดยวกบท เขาท าลายพวก
ผกกาดขาว คะนา กะหล าปล และผกกาดหอม ซงมดงน
โรคเนาคอดน สาเหตเกดจากเชอรา Pythium sp. หรอ Phytophthora sp. เปนโรคทเกดขนในแปลง
ปลกผกกาดเขยวกวางตงทหวานเมลดแนนเกนไป อบลม และตนเบยดกนแนนแสงแดดสองไมถงโคนตน
ถาในแปลงมเชอโรคอยแลวตนกลา จะเกดอาการเปนแผลช าทโคนตนระดบดนเนอเยอตรงแผลจะเนาและ
แหงไปอยางรวดเรว ถาถกแสงแดดท าใหตนกลาหกหรอพบ เพราะมแผลช าทโคนตนระดบดน ตนจะเหยว
ตายในเวลารวดเรวบรเวณทเปนโรคจะคอยๆ ขยายวงกวางออกไปเปนวงกลมกวางขน ภายในวงกลมทขยาย
ออกไปจะไมมตนกลาเหลออยเลย สวนตนทโตแลวจะคอยๆ เหยวตายไป
การปองกนก าจด บนแปลงปลกควรมการระบายน าทด ไมควรหวานเมลดผกแนนเกนไป ใชยา
ปองกนก าจดเชอราละลายน าในอตราความเขมขนนอยๆ ราดลงไปบนผวดนบนแปลงใหทวสก 1-2 ครง
เชน เทอราคลอเบนฟอรด ซงเปนยาปองกนก าจดเชอราในดนโดยตรงจะไดผลยงขน หรอจะใชรคโดมล เอม
แซด 72 ละลายน ารดกไดผลด
โรคใบจดของผกกวางตง สาเหตเกดจากเชอรา Alternaria brasaiciala อาการจะปรากฎทใบลางของ
ล าตน โดยเรมแรกพบเปนจดสเหลองซดขนาดเลก ตอมาแผลจะขยายใหญขน และแหงเปนสน าตาลออน ม
ลกษณะคอนขางกลม ทบรเวณแผลจะพบเชอขนเปนวงสด าซอนกนอย แผลเหลานเมอรวมกนกอใหเกด
อาการใบไหม
การปองกนก าจด คลกเมลดพนธดวยสารเคม ไธแรม, มาเนบ 2-3 กรมตอเมลด 1 กโลกรม เกบใบ
ลางทแสดงอาการไปเผาท าลาย หรอฉดพนดวยสารเคมแมนโคเซปหรอไปโปรไดโอน ในอตรา 20-30 กรม
ตอน า 20 ลตร เมอพบอาการ โดยฉดพนทก 15 วน
56
โรคราน าคางของผกกวางตง สาเหตเกดจากเชอรา Peronospora parasitica อาการจะปรากฏเปนจดส
ขาวซดบนใบ ตอมาแผลขนาดใหญขนแผลซดสฟางขาว ยบตวลง แผลมขนาดรปรางไมแนนอน เมอพลกด
ใตใบ ในตอนเชาทมอากาศชนจะพบสวนของเชอเจรญเปนขยสขาวฟขนบรเวณใตแผลอาการมกเรมแสดงท
ใบลางๆ กอนแลวจงลกลามสใบทอยถดขนมา หากเปนรนแรงใบจะแหงตายไป
การปองกนก าจด คลกเมลดดวยสารเมทาแลคซลในอตรา 7 กรมตอเมลด 1 กโลกรม เกบใบลางท
แสดงอาการของโรคใสถงพลาสตกแลวน าไปเผาท าลาย หรอฉดพนดวยสารเคมซเนบหรอแคปแทน ใน
อตรา 30 กรมตอน า 20 ลตร เมอตรวจพบอาการ
เพลยออน มชอวทยาศาสตรวา Lipaphis erysimi ตวออนของเพลยออนออกจากทองแมไดโดยไม
ตองไดรบการผสมพนธ ตวออนเมอออกจากแมใหมๆ จะพบวามล าตวขนาดเลกมาก ตองสองดดวยกลอง
จลทรรศน ล าตวมสเหลองออน นยนตาสด า ขาทง 3 คมสเดยวกบล าตว หนวดส น รปรางคลายตวเตมวย
ระยะเปนตวออนจะมการลอกคราบ 4 ครง ตวออนมอายประมาณ 5-6 วน หลงจากนนกจะเปนตวเตมวย ตว
เตมวยมทงพวกทมปกและไมมปก ระยะตวเตมวยมชวตอยไดประมาณ 6-18 วน ตวเตมวยตวหนงสามารถ
ออกลกไดตลอดชวตประมาณ 75 ตว
ลกษณะการท าลาย เพลยออนสามารถเขาท าลายไดทงในระยะตวออนและตวเตมวย โดยการดดกน
น าเลยงจากพชทงสวนยอด ใบออนและใบแก ลกษณะอาการทเหนไดชดคอ สวนยอดและใบจะหงกงอ เมอ
จ านวนเพลยออนเพมมากขนพชจะเหยว ใบทถกท าลายจะคอยๆ มสเหลอง นอกจากนเพลยออนยงอยตาม
ซอกใบซงเปนทรงเกยจของผบรโภค
การปองกนก าจด เมอพบเพลยออนเขาท าลายควรใชสารเคมกลมมาลาไธออน เชน มาลาเทน, มา
ลาไธออน 83% ในอตรา 30-55 ซซ ตอน า 20 ลตร พน 2 ครง แตละครงหางกน 7 วน นอกจากนอาจใชใน
อตรา 5 กรมตอน า 20 ลตร ท าการพนเปนครงคราว
หนอนใยผก มชอวทยาศาสตรวา Plutella xylostella ตวหนอนเกดจากไขทแมผเสอวางไวใตใบ ไขม
สเหลอง คอนขางกลม วางตดกน 2-5 ฟอง อายไขฟกประมาณ 3 วน จงเปนตวหนอน ตวหนอนมขนาด
คอนขางเลกมองเหนยาก มการเจรญรวดเรวกวาหนอนอนๆ ระยะเวลาเพยง 1 สปดาห กจะโตเตมทมขนาด 1
เซนตเมตร สวนทายมปมยนออกมา 2 แฉก เมอถกตวจะดนอยางแรงและทงตวลงในดนโดยการสรางใย
ดกแดมขนาด 1 เซนตเมตร อยภายในใยบางๆ ตดใตใบ อายดกแด 3-4 วน ตวเตมวยมสเหลองเทา ตรงสวน
หลงมแถบสเหลอง อายเตมวย 1 สปดาห มกพบตวเตมวยตามใบ โดยเกาะอยในลกษณะยกหวขน
57
ลกษณะการท าลาย การวางไขของแมผเสอคอนขางหนาแนน ในตนหนงจะพบหนอนมากกวา 10
ตว หนอนใยผกจะกดกนผวดานลางใบจนเกดรพรน รอยทเหนจะแตกตางกบหนอนชนดอนและมกจะเขา
ไปกดกนยอดทก าลงเจรญเตบโต ท าใหยอดผกเสย ท าใหเสยคณภาพ
การปองกนก าจด สามารถท าไดหลายวธ เชน การใชสารเคมก าจดตวหนอนโดยตรง การใชเชอ
แบคทเรยบาซลลสทรรนเจนซสท าลาย และหมนตรวจดแปลงปลกอยเสมอเมอพบตวหนอนควรรบท าลาย
ทนท
ดวงหมดผก มชอวทยาศาสตรวา Phyllotreta sinuata ตวเตมวยเปนแมลงปกแขงขนาดเลก ยาว 1 1/2
มลลเมตร ตวเตมวยจะวางไขในดนบรเวณใกลๆ ตนพช ตวออนมขนาดเลกสขาวใส โตเตมวยจะกดกนใบ
จนเปนรพรน ท าความเสยหายไดในระยะทผกก าลงเจรญเตบโต ส าหรบตวออนทเปนหนอนชอบกดกนราก
บางครงอาจเกดการระบาดในระยะทยงเปนตนกลา
การปองกนก าจด การไถตากดนในฤดแลงจะชวยท าลายตวออนหรอดกแดทอยในดนได ก าจด
วชพชในบรเวณแปลงผกเพอตดวงจรอาหารของตวหนอน หรอฉดพนดวยเซฟวน 85 หรอแลนเนท


















