Cache Management of Dynamic Source Routing for Fault Tolerance in Mobile Ad Hoc Networks.

IEEWACM TRANSACTIONS ON NETWORKING. VOL. 1 , NO. 2, APRIL 1993 26 1
Dynamic Routing in Multiparented Networks Richard J. Gibbens, Frank P. Kelly, and Stephen R. E. Turner
Abstract-In this paper, we investigate some of the conse- quences for dynamic routing schemes of dual- and multiparented networks, in which a call can enter (or leave) the network at two or more points. In particular, we compare bounds on the performance of optimal dynamic routing strategies which respectively ignore and utilize the multiparented structure, and show that simple schemes, easily implemented and analyzed, are able to achieve most of the additional advantages allowed to dynamic routing schemes by multiparenting. Further, we illustrate the robust behavior of these schemes under traffic mismatches as well as multiple link or node failure events.
I. INTRODUCTION
ORK on dynamic routing in circuit-switched networks W has concentrated mainly on fully connected networks; not unreasonably, since economic pressures have generally led to core networks which are effectively fully connected. Increasingly, reliability considerations are leading to dual- and multiparented architectures, in which a call can enter (or leave) the core network at two or more access points. In this paper, we investigate some of the consequences for dynamic routing schemes of dual- and multiparented networks.
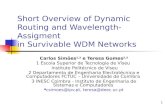
The network structure we consider is illustrated in Fig. 1. There are two levels: the core network and the access network. The nodes of the core network are fully connected, while nodes in the access network are connected to two or more nodes (termed parenrs) in the core network. In Section 11, we describe more formally this dual,-parented network.
In Section 111, we outline three families of dynamic routing schemes. The first family assumes that a call must enter the core network through a single defined parent, and must leave the core network through a single defined parent. The core network may, however, route the call between these two nodes as it pleases: either on the direct single link joining the parents, or on any of the two-link or longer paths through the core network between the two parents. A theoretical bound on the performance of any such scheme is given in Appendix B. Simulations indicate that the bound can be approached by a scheme described as follows: each link calculates a trunk reservation parameter as a function of its capacity and the offered traffic to the core network between the two parents it
Manuscript received October 9, 1991; revised April 9, 1992; recommended for transfer from the IEEE TRANSACTIONS ON COMMUNICATIONS by the IEEWACM TRANSACTIONS ON NETWORKING Editor-in-Chief. The work of R. J. Gibbens and S.R.E. Tumer was supported by SERC under Grants GR/E83009 and GR/F94194.
The authors are with the Statistical Laboratory, University of Cambridge, Cambridge, England CB2 ISB. (email: [email protected]), (email: f.p.kelly @statslab., cam.ac.uk)(email: [email protected])
IEEE Log Number 9208889.
core network
Access m o r k
Fig. 1. The network structure.
joins; a call offered to the core network between two parents is routed directly if possible, and if not is offered to a randomly ordered sequence of two-link paths joining the two parents until such a path is found where both links are occupied below their respective trunk reservation parameters; if no such two- link path exists, the call is lost. This scheme is the special case ALBA(2) of the Aggregated Least Busy Alternative family of schemes discussed in [20]-[22]. A major impetus for work in this area is AT&T's recent deployment of Real-Time Network Routing [l].
The second family of schemes we describe assumes that the network is able to route a call by any route through the core network connecting any parent of the originating node with any parent of the destination node. A bound on the performance of any such scheme is clearly given by Erlang's formula, with arguments from the sum of the offered traffics to the core network and the sum of the link capacities of the core network. This bound is approached by a least loaded routing scheme: route each call by one of the single-link routes through the core network able to carry it, and choose the one with the most free circuits. The performance of this scheme considerably improves on the bound provided for schemes from the first family.
Dynamic routing schemes from the first family essentially ignore the multiparented structure; schemes from the second family are able to exploit the additional routes made avail- able by multiple parents, and this explains their improved performance. However, to implement a scheme from the second family may be difficult: for example, the least loaded routing scheme would require the originating node for a call to route the call to a parent whose identity depends on the instantaneous state of various links in the core network. Might more easily implemented schemes be able to achieve much of the improvement in performance possible by exploitation of
1063-6692/93$03.00 0 1993 IEEE

262 IEEWACM TRANSACTIONS ON NETWORKING, VOL. 1, NO. 2, APRIL 1993
multiparenting? An attempt to answer this question leads us to the third class of schemes we consider. These schemes are based on two elementary principles: the lastchance principle, whereby a link gives priority to calls which will be lost if they are blocked; and the sticky principle, whereby a route which successfully carries a call is left as a preferred route while a route which is unable to carry a call is replaced. For earlier work on the lastchance principle, see [9], [12], [14]. For earlier work on sticky routing, see [4], [ 5 ] , [8], [23], [26]. A wide-ranging review of dynamic routing in circuit-switched telecommunication networks, including a re- cent discussion of the implementation in the BT network of a scheme based on the sticky principle, can be found in [ 111, t 161.
In Section IV, we consider the performance of the three families of routing schemes for approximately symmetric networks, under various conditions of variable traffic, and failure of links or nodes. We find that simple schemes, easily implemented and analyzed, are able to achieve most of the additional advantages allowed to dynamic routing schemes by multiparenting.
11. THE NETWORK
We consider a fully connected network of N “parents,” numbered 1 to N . The undirected link from parent i to parent j has capacity Ci,j. Many of the schemes we consider will involve a trunk reservation parameter ri,j. We set C<j = Ci,i - ri , j . A high-priority call offered to a link is accepted if there are any free circuits, whereas a low-priority call is only accepted if fewer than C;j circuits are being used.
Calls are generated between nodes, numbered 1 to n. In the dual-parented model, each node i is connected directly to two of the parents, which we call i o and 2 1 . We assume that these access links are nonblocking or, equivalently, that they have infinite capacity, in order to concentrate attention on the issue of routing through the core network. Nodes which have the same two parents are said to be in the same cluster. Clusters which share a parent are said to be adjacent. See Fig. 1 for a schematic diagram of the network structure, and [7] for related discussion on future trends in logical (trunk group) and physical (facility) design.
Calls from cluster i to cluster j arise as a Poisson process of rate Xi, j , independent of other traffic streams. Each call has a holding time exponentially distributed with mean 1, independent of other calls and of the arrival processes. We shall assume for simplicity that a call between two clusters is equally likely to be due to any noddnode pair within those clusters. Calls between two nodes in the same or adjacent clusters can be successfully routed via access links only, not via the core network. Since we are primarily concemed with effects in the core network, we shall omit consideration of such traffic.
To complete the description of a network, it is necessary to define which clusters are connected to which parents. This we do in Appendix A, where we give a detailed description of the specific network example which we shall use throughout the paper.
111. THE SCHEMES
A. Single-Parented Routing
The first family of schemes we consider are called Single- Parented Routing (SPR). A call chooses a parent of its source node i and a parent of its destination node j without reference to the state of the network. It must enter the core network through the first parent and leave through the second parent. Thus, the routing in the core network does not make any use of multiparenting, and for each call the network is effectively single-parented. However, a call may be carried on any route through the core network subject to these conditions.
In Appendix B, we obtain a lower bound (5) on the network loss probability of any SPR scheme. The bound is approached by a simple scheme which can be described as follows. Each link calculates a trunk reservation parameter as a function of its capacity and the offered traffic to the core network between the two parents it joins (the precise method of calculation is described in Appendix B). A call offered to the core network between two points is routed directly if possible; if not, it is offered to a randomly ordered sequence of two- link paths joining the two parents until such a path is found where both links are occupied below their respective trunk reservation parameters. If no such two-link path exists, the call is lost.
Fig. 4 illustrates the lower bound on the performance of any SPR scheme, and simulation results for the particular SPR scheme just described, for the dual-parented network defined in Appendix A. The parameter v measures the load on the network: it is the direct traffic offered to a general link of the core network, and is formally defined in Appendix A. For simulation results, the size of the plotting character is comparable to the standard error. We discuss these results further in Section IV.
B. Least Loaded Routing The second family of schemes we consider assumes that
the network is able to route a call by any route. Observe that, for a dual-parented network, a call from node i to node j has then the choice of four possible direct routes through the core network (it can choose to go via parent io or i l of node i , and via parent j o or jl of node j ) .
Since each call passing through the core network must use at least a single circuit from that network, a lower bound on the network loss probability is given by Erlang’s formula E ( C X i j , Cij), where the summations run over all links ij of the core network.
An example of a scheme from our second family is Least Loaded Routing (LLR), defined as follows. The scheme simply looks at the four possible direct routes through the core network that a call could take, and chooses the one with the greatest number of free circuits. If all four routes are full, the call is lost. Fig. 4 illustrates the Erlang bound and the simulated performance of LLR, for the dual-parented network defined in Appendix A. For further discussion and examples of this class of bounds, see [4]. We see, from Fig. 4, that under a wide range of offered traffic the performance

GlBBENS et al.: DYNAMIC ROUTING IN MULTIPARENTED NETWORKS 263
11-1 hS Fig. 2. Routing a call from i to j.
of LLR considerably exceeds that of the SPR schemes and comes close to the Erlang bound. Note, especially, that there is very little incentive to consider schemes other than LLR from within the second family of schemes (for example, schemes that allow a call to use two or more links within the core network). The Erlang bound in Fig. 4 indicates how little there remains to be won over LLR by any such scheme.
However, the LLR scheme may be hard to implement, relying as it does on having instantaneous information about the occupancy of links in the core network. Therefore, we seek schemes which are able to obtain most of the benefit of dual-parenting, but which are simple and easy to implement. The schemes we consider are based on two simple principles (lastchance and sticky), which we now describe.
C. Lastchance
The use of a trunk reservation parameter against calls which would use an excessive amount of network resource if they were carried is a familiar one. The lastchance principle, however, uses trunk reservation in a different way, namely, to favor calls which are attempting their last possible route through the network and would therefore be lost if they were blocked. Theoretical analysis [ 141 indicates the considerable merit of this principle, provided alternative routes use no more network resource than first choice routes.
Motivated by this principle, we define the following simple lastchance scheme. A call chooses, at random, equiprobably from among its four direct routes across the core network; suppose it chooses the route via link i t j s . It is attempted on this link at low priority. If it fails there-that is, if there are no more than ritj, free circuits on that link-it attempts the route via link i t j ( l - s ) at high priority. If it cannot be carried there, because there are no free circuits on that link, the call is lost (see Fig. 2). Observe that the call may be lost, even though there are free circuits available on the link & j S . We discuss this point further in Section IV.
D. Sticky The sticky principle is that routes on which a call is carried
are retained as preferred routes, while routes on which a call is blocked are replaced. Thus, nodes and parents are allowed to remember a very limited amount of information about
Call from i toj
First choice route
I No I
NO c. First choice parent
for (i,j) switches
Fig. 3. The general sticky scheme.
the success or otherwise of previous calls. We illustrate this principle in the following sticky scheme.
Node i has a current first-choice parent for calls to node j , i t say, and parent it has a current first-choice route for calls to node j via either j , or jl. We say that parent it is in state 0 for calls to node j if its first-choice route is via parent j , and state 1 if the first-choice route goes via j 1 .
Now a call from i to j will be attempted via parent i t . If i t is in state s, then it will attempt to route the call via j,. If the call is successfully carried on i t j s , then the current first choices are unchanged. If the call is not successful there, it is attempted on the link from i t to j(l-J). If it is carried there, i t switches to state (1 - s). If it fails there also, the call is lost and node i switches its first-choice parent for calls to node j to i(l-t). The lastchance and sticky principles are combined in the general sticky scheme flowcharted in Fig. 3. A pure sticky scheme is obtained by setting the trunk reservation parameter rij to zero.
Note that the general sticky scheme uses only very simple rules, which can be easily implemented. A further consequence of simplicity is that we can derive a fixed point analytical model for the scheme. The underlying assumption of the analytical model is that occupancies of different links are independent. The details of the analytical model are presented in Appendix C.
The results of the analytical model are shown in Fig. 4, for the sticky scheme with trunk reservation parameter T = 2. Also shown are simulation results for the same scheme. The analytical model described in Appendix C was used to choose the value T = 2 for the trunk reservation parameter. This choice is optimal or near-optimal for all of the various examples considered in this paper.

264
__.._
Eriang bound I LLR
590 595 600 605 610 615 620
V
Fig. 4. “Symmetric” network
- -_ - - SPR lower bound sticky, r=2
550 600 650 700
U Fig. 5. “Symmetric” network.
IV. DISCUSSION
A. Relative Pe~onnance
Fig. 4 collects results on the three families of schemes described in Section 111. It is interesting to view Fig. 4 as part of a larger figure. At low offered traffics, any reasonable scheme has (effectively) zero blocking. We see in Fig. 5 that, for sufficiently high offered traffic, all schemes again perform similarly. However, as the offered traffic increases from a low level, the blocking for the SPR bound rises before that for the sticky scheme. Thus, there is a region where the sticky scheme has near-zero blocking, while the SPR scheme may have a blocking of up to 2%.
Note, in Fig. 4, how close the performance of the SPR and LLR schemes are to their respective bounds. Although we do not have a formal proof that the analytical model of the sticky scheme is a bound, the model’s independence assumption would seem to be too favorable. Therefore, it is not surprising that simulations of the sticky scheme also lie above their respective curve.
The active exploitation of multiparenting by the LLR scheme achieves a considerable improvement in performance over the
*
IEEWACM TRANSACTIONS ON NETWORKING, VOL. 1, NO. 2, APRIL 1993
- - - - - + SPR lower bound I SPR - x sticky, r=2 . . . o Edang bound / LLR
I I I I I I I I
0 1 2 3 4 5 6 7
number of failed links
Fig. 6. Link failures.
best possible SPR schemes. Further, most of this improvement can be achieved by schemes as simple as the sticky scheme.
While our illustrations concentrate on networks with link capacities of the order of 600 circuits, similar results hold for other capacities. For example, if link capacities are of order 120 circuits, then with v = 115, the network loss probability is around 0%, 0.7%, and 4% under the LLR, sticky, and SPR schemes.
B. Link Failures
Any scheme must be judged both by its level of blocking and by its ability to cope with mismatches of traffic and capacity in the network. The first sort of mismatch we consider is provided by considering the effect of link failures. As we fail links, we expect the blocking to increase as the capacity decreases. Indeed, in Fig. 6 (which takes v = 610 and fails random “general” links one after another) we see that the relative performance of the schemes is very similar to that of Fig. 4.
C. Trufic Mismatches
The general sticky scheme described in Fig. 3 is based on both the sticky principle and, if trunk reservation parameters are positive, the lastchance principle. In this section, we show that these principles are essentially complementary.
In the analytical model of the “symmetric” case, the sticky scheme cannot gain any significant advantage over the sim- pler lastchance scheme since the blocking probabilities on different routes are approximately the same. However, the sticky scheme can show its superiority over the lastchance scheme when traffics and capacities are mismatched. In this case, the sticky scheme can “lea”’ to direct more traffic towards less loaded links, thus utilizing the capacity available in the network more effectively. As an example of this, we consider an adjustment in the traffics offered between clusters, derived from the traffic matrix described in Appendix A (in this matrix, entries take the values 0 or X = AV) as follows. Two clusterkluster pairs are chosen at random from among

GIBBENS et al.: DYNAMIC ROUTING IN MULTIPARENTED NETWORKS 265
lastchance, r=O lastchance, r=2 sticky, r=O sti i . r=2 Edang bound
__--.
............
_./ ..... __- _ _ - - ..... _ - _ _ _ - - - ....... ---~:_____--_-.~--------. ...... .............. .................
0.0 0.2 0.4 0.6 0.8 1 .o a
Fig. 7. Traffic mismatches
the set, S, of all clusterkluster pairs providing traffic to the core network. An amount of offered traffic uniformly distributed on [0, ax] is taken from one and put on to the other. The two clusterkluster pairs are removed from the set S, two more pairs are selected, and the same procedure applied (and so on, until all pairs have been used). The effect of this is that traffic and capacity are mismatched, but the total amount of traffic and capacity remain constant. Fig. 7 shows the results for networks which have been generated by this method for v = 610 and a range of cy. Observe that as cy
increases, producing more highly asymmetric traffic patterns, the lastchance scheme degrades by nearly 50% but there is no significant degradation in the performance of the sticky scheme. Indeed, at the right-hand end of the graph, the pure sticky scheme (with T = 0) is better than the lastchance scheme with T = 2. The sticky scheme is better able to divert traffic towards less loaded parts of the network, thus providing a far greater robustness against mismatches of traffics and capacities.
Reviewers have remarked that it seems surprising that the sticky schemes are oblivious to the degree of traffic mismatch, and counterintuitive that the cases T = 2 outperform the cases T = 0. Since all routing in the core network is direct, surely it is perverse to deny access (by the choice T = 2) to free circuits. It is, however, our intuition that requires development. Recall that the link i t j , in Fig. 2 will cany traffic between several clusterkluster pairs, since nodes it and j , are each parents to more than a single cluster (see Fig. 1 and Appendix A). Some of these traffic streams will view the link i t j , as first choice, some as second choice. A positive trunk reservation parameter T favors those streams which will be lost if blocked, and this allows traffic to be shared more evenly over the various links of the core network. Similarly, the sticky scheme allows the proportions of traffic from node i to nodes i o or il (in Fig. 2) to adapt in order to load the core network more evenly, even in the presence of traffic mismatches. Several other schemes can, of course, achieve a similar even loading: we have described LLR earlier, and various schemes of intermediate complexity, involving crankback for example, could be devised. The important point
is that, in a multiparented network, the routing strategy should encourage the capacity available throughout the core network to act as a single pooled resource.
D. Parent Failures
We now turn to the question of speed of response in the sticky scheme when a failure occurs. It is important for a scheme to be able to adapt as quickly as possible to a failure, with as few calls lost as possible. We consider a simulation where, at a certain time, a whole parent fails (from the “symmetric” case with v = 610, T = 2). If we consider just the traffic streams out of the clusters which are parented on the failed parent, then the effect of failing the parent is shown in the upper graph of Fig. 8. We see that, at first, the blocking from these clusters becomes very high. As calls attempt to go via the failed parent and are blocked, however, the states automatically flip and future calls are sent to the other parent. Therefore, the blocking drops quite quickly. We can also obtain an analytical model for this effect as follows. Before the parent fails, the blocking is the same on all links in the network, so the states are set equiprobably and the sticky scheme is effectively the same as the lastchance scheme. Therefore, just after the parent fails, the blocking out of the relevant clusters is the same as it would be under the lastchance scheme, which according to the analytical model is 53%. When it has settled down, the blocking out of these clusters reaches the blocking for the sticky scheme, which is 12%. Now recall that traffic from one cluster to another is generated at rate &v, so traffic from one node to another is generated at rate AV.-&, where n, is the number of nodes in a cluster. In our case, v = 610 and nc = 6 so the rate at which traffic is generated between two given nodes is 3.765 Erlangs. Since each nodelnode pair has a state which, if it is set to the failed parent, flips as soon as it tries to send a call, the decay from the higher to lower value is exponential of rate 3.765. This analytical result is portrayed on the lower graph of Fig. 8 and we see that it agrees very closely with the observed results. Note that the sticky scheme adapts as quickly as is possible using only information gleaned from blocked calls. (LLR, of course, uses more information than this and adapts more quickly). If v increases, the decay will be quicker, and only the same number of calls will be lost. If n, were larger, however, more calls would be lost and the decay would be slower.
Further discussion of reliability and robustness issues can be found in [2], [4], [17], [24]. Results on the speed of response of sticky and other schemes are reported in [3], [13], [23].
V. MULTIPARENTING All of the above analysis extends naturally from dual- to
multiparented networks. The main reason for considering net- works with greater numbers of parents is to increase reliability in the access to the core network. For example, if one link from a node to a parent fails in the dual-parented case, half the capacity is lost whereas, in the triple-parented case, only one-third of the capacity is lost. This is not a concern in our analysis since we gave the access links infinite capacity. Nevertheless, greater numbers of parents can also reduce

266
( 0 '
IEEWACM TRANSACTIONS ON NETWORKING, VOL. I , NO. 2, APRIL 1993
2 -
8 2 - 0 13
B
N - O
7 - 0
____.......___......___________.___
call holding times
Node failure at time 0, local blocking. Fig. 8.
blocking by increasing the number of routes (and, indeed, the number of schemes) available. In any case, since many real networks are moving to triple-parenting it is important that our scheme should generalize simply to such cases. Therefore, we discuss briefly this generalization, using the triple-parented case as an example.
In the triple-parented case, each subscriber is connected to the three nearest parents geographically, which produces 72 clusters in our network. The lastchance and sticky routing rules work analogously, except that each call may attempt three routes: the first being chosen as in the dual-parented case, the other two being the other two routes from the first- choice parent in a random order. The call is at high priority only on its last attempt. In the sticky scheme, the first choices change in an analogous way to the dual-parented case.
In Appendix C, we mention how the analytical model gen- eralizes to the multiparented case under a variety of possible schemes. Changing to the multiparented case reduces the blocking still further (although we cannot expect a dramatic improvement, as in the dual-parented case we are already performing close to the Erlang bound) and provides even greater robustness in certain types of failure condition (such as the failure of a whole parent).
Fig. 9. The network.
Throughout, we have assumed that access links are non- blocking, but it is straightforward to generalize our simple schemes to the case where access links have finite capacity. To give a brief example, if calls can overftow between the various access links connecting a node to its several parents, then trunk reservation in favor of a call on its last attempted access link will encourage the efficient use of the access links P I .
VI. CONCLUSIONS
In this paper, we have investigated some of the conse- quences for dynamic routing schemes of dual- and multipar- ented network architectures. We have compared bounds on the performance of optimal dynamic routing strategies which respectively ignore and utilize the multiparented structure, and have shown that simple schemes, easily implemented and analyzed, are able to achieve most of the additional advantages allowed to dynamic routing schemes by multiparenting. Fur- ther, we have illustrated the robust behavior of these schemes under traffic mismatches as well as multiple link or node failure events.
APPENDIX A: NETWORK EXAMPLE
In this Appendix, we define in detail the specific network example used throughout the paper. Our general conclusions are not dependent on the special characteristics of the example, but the detail is needed to calculate parent-to-parent loads for both analytical and simulation models.
We shall be concerned with a particular dual-parented net- work in which clusters are connected to parents, as illustrated in Fig. 9. In this network, there are 24 parents (open circles, small numbers) arranged in a hexagonal pattern-recall that in the core network these parents are fully connected (see Fig. 1). To avoid special effects near the boundaries of the network, we ensure that each parent has three nearest neighbors by associating the parents on one edge of the network with

GIBBENS et al.: DYNAMIC ROUTING IN MULTIPARENTED NETWORKS 261
those on the opposite edge, thus arranging the network on a torus-the numbering shows this. This gives rise to the 36 clusters shown (diamond shapes, large numbers). Note that all clusters are the same size since those overlapping an edge are continued on the opposite edge. Each cluster contains a number of nodes connected to the two parents of the cluster (see Fig. 1): for simulations, we use six nodes per cluster while our later analytical results are independent of the number of nodes per cluster. In a preliminary study [6], the authors considered the parents arranged around a circle instead of according to a hexagonal pattern. Our results are not especially sensitive to the distinction: the hexagonal pattern was chosen to be more representative of users and network nodes distributed over a two-dimensional region. Note that is not possible to define a completely symmetric multiparented network: the traffic between parent nodes depends on the pattern of shared parents and hence upon assumptions, such as those just described, about which clusters are connected to which parent.
We wish to calculate results for specific traffic and capacity matrices. The first we describe is the “symmetric” case, where the blockings on each link are approximately the same under uniform direct offered traffics. Say that two parents are at distance 1 if they share a cluster. Thus, parents 9 and 15 are at distance 1. Parents 9 and 16 are examples of parents that are distance 2. Call the link between two parents a “short” link if the parents are at distance 1 or 2, otherwise call the link “general.”
A “general” link has three distinct clusters attached to the parents at each end, and there are 18 ordered cluster pairs which are directly connected by the link. Suppose that we wish to offer traffic at rate U to a “general” link. If each of the 18 ordered cluster pairs offers $ of its traffic to a link, we should set A i j = &U for each of these ordered pairs. Thus, the natural choice for a “symmetric” traffic matrix is to set X i j = 0 if i, j are adjacent, and A;, = &U otherwise.
Since X i j = 0 for adjacent clusters, the traffic offered to “short” links will be less than to a “general” link. So consider parents at distance 1, for example 9 and 15. Now cluster 17 is adjacent to each of the other four clusters, so only the following traffic streams use link (9, 15): 11 tf 20, 12 H
20, 11 H 21, 12 H 21. Thus, the amount of traffic offered to the link between 9 and 15 is $ ‘8X = : U . Likewise, consider parents at distance 2, for example 9 and 16. Now clusters 17 and 21 are adjacent, so link (9, 16) has only 16 of the usual 18 traffic streams offered to it. Thus, the amount of traffic offered to this link is : U .
Next, we consider how to adjust the capacity of “short” links so that the blocking is similar over all links. We shall generally use a nominal link capacity of 600 and v x 600. For v M 600, we have
E(v,600) M E(:u,53.5) x E(:u,274).
To make the blockings on all links approximately equal, we shall use C:,j = 274 for i, j at distance 1, C:,j = 535 for z, j at distance 2, and C:,j = 600 otherwise (the equivalent figures for a nominal link capacity of 120 are C:,j = 57, 108, and
120). This completes the definition of the “symmetric” traffic and capacity matrices.
APPENDIX B: SINGLE-PARENTED ROUTING We aim to find a bound on the performance of SPR schemes,
as defined in Section 111-A. Consider the following sequential optimization problem. We have a single link of capacity C offered one stream of Poisson traffic at rate v, and a second stream at infinite rate. Accepted calls have independent exponentially distributed holding times with unit mean; calls from the first stream generate a reward of 1 on acceptance, while calls from the second stream generate a reward of on acceptance. The control action allowed is to admit or reject an arriving call, where it is known which stream the arriving call is from, but the call’s future holding time is not known. The objective is to maximize the long run average reward earned per unit time. The optimal policy for this C + 1 state Markov decision process [18], [191, [25] is to accept a call from the first stream whenever one arrives and the occupancy is less than C, and to accept a call immediately from the second stream when the occupancy drops below a level C - T for some parameter T . The average reward earned per unit time is
1 2 u ( 1 - w(C)) + -(C - T)T(C - T ) (1)
where
U ‘ ( C - T ) !
C! 7r(C) = w(C - T ) x
and
(3) 1 -l [ n:o ( C - r + n ) ! .
u”(C - T ) ! 7r (C-r )=
Henceforth, let T be chosen to maximize (1). Note that if calls from the second stream do not arrive at infinite rate but perhaps according to some arbitrary stochastic process, then (1) provides an upper bound on the average reward since the set of available control actions has been reduced.
Consider a fully connected network, able to route any arriving call directly or over any preferred two-link or longer alternative or to reject the call. Let C k be the capacity of network link k, and let U k be the arrival rate of traffic which can be routed directly on link IC, for IC = 1 , 2 , . . . , K. Suppose that a reward of 1 is generated on acceptance of the call. Allocate this reward to a link carrying a directly routed call, or divide it evenly over each link involved in carrying an alternatively routed call. Then, the long run average reward earned per unit time cannot exceed
If it did, then there would exist at least one link in the network earning more than its upper bound (1). Hence, we deduce that

268 IEEWACM TRANSACTIONS ON NETWORKING, VOL. 1 , NO. 2, APRIL 1993
the network blocking probability cannot be less than
. .. - K 2 vk k=l
TABLE I TRUNK RFSERVAT~ON PARAMETERS
Note that this bound applies to any policy, not just those that limit routing to two-link paths or which use trunk reservation mechanisms.
In [lo], [22], it is shown that the bound (5) is approached asymptotically as the number of nodes in the network in- creases, at least in the case of a symmetric network. The form of the suggested policy is quite simple and can be described as follows. Let rii be a trunk reservation parameter for link zj, selected to be the value for T which maximizes (1) when v, C are replaced by vij , Cij. Then, the suggested policy is to route a call directly if possible, and otherwise only if an alternative route can be found through two links-each of which has more circuits free than its respective trunk reservation parameter rij. (We expect the suggested policy to be near optimal for all but severe mismatches between traffic and capacity patterns. The implied costs [14] at a link for carrying directly and alternatively routed calls approach the ratio 2 : 1 as a network is overloaded unless, for example, a node is the subject of a focused overload with plenty of spare capacity elsewhere in the network. For a closely related asymptotically optimal policy that arises with repacking, see [4]; [15].)
Note that in both the bound on network performance and the suggested policy, the trunk reservation parameter chosen for a link depends on its capacity and direct offered traffic but does not depend on the level of overflow traffic expected. It is remarkable that the choice of trunk reservation parameters can be decentralized to such an extent.
The lower bound (5) and simulation results for the above policy are shown in Fig. 4, labeled SPR, for the dual-parented network defined in Appendix A. To fix a distribution of traffic over parents, it is assumed that a call chooses a parent of its source node and a parent of its destination node equiprobably. The trunk reservation parameters rij, chosen in accordance with the maximization of (I), range from 20 to 46 over the various links of the network and over the various levels of traffic, as shown in Table I. When links fail, this alters (5) for network blocking but not the maximizations of (1) for any unfailed link. Therefore, the trunk reservation parameters appropriate for the SPR bound in Fig. 6 are given by the column labeled v = 610 in Table I. It is interesting to compare these various high levels of trunk reservation parameter with the much smaller choice T = 2 used, for a different purpose, by the sticky schemes of Section 111-D. High levels of trunk reservation parameter are needed to dissuade SPR from packing in too many alternatively routed calls [4].
Link Capacity Offered Traffic v
( 5 )
600 36 41 46 I . .~
I
APPENDIX c: WE ANALYTICAL MODEL
Our analytical model treats the occupancies of different links as independent, and assumes that any call of a given priority arriving at a link has a probability of being blocked which
is constant. Following the notation of [14], we shall call the probability that a high-priority call is blocked on link zj B:,j, and the probability that a low-priority call is blocked there B:,j.
Suppose a link of high and low capacities (Cl and C2, respectively) is offered high and low priority traffics at rates v1 and v2. respectively. Model the number of calls in progress on the link as a birth-and-death process. This has a stationary distribution, giving the probability of a call being blocked. Suppose that the probability of a high-priority call being blocked is E1(vl, v2, C', C2), and that the probability for a low-priority call is E2(v1,v2,C1,C2). We shall also use E(v, C) = E1(v, 0, C, .) to denote Erlang's blocking formula.
In the lastchance scheme (Section 111-C, Fig. 2), a call has a a probability of attempting to go via each of its four routes. The calls from cluster i to cluster j, thus, offer low-priority calls at a rate $Xi , j to each of the four links they could use. Hence, we can calculate the low-priority traffic p i , ! offered to link Icl. Likewise, the calls from cluster i to cluster J contribute high-priority traffic at rate aXi,,B:i,3(1-s, to link itjsr since a call is passed to itj, if it attempted z t j p S ) and was refused there at low priority. So, we can calculate the high-priority traffic pi , l offered to a link kl. Then, and B& are given by
and
That the above equations have a solution is a consequence of the Brouwer fixed point theorem, and a solution can be found using a dampened form of repeated substitution.
In the sticky scheme (Section 111-D, Fig. 3), we can regard the state of parent i t ( t = 0 or 1) for calls to node j as a two- state Markov chain. If the chain is in state 0, it switches to state 1 if a call fails on z t j o at low priority but is carried on ztjl at high priority. This happens with probability , j , (1 - B!t , j l ). The chain stays in state 0 if it is carried on zt jo or fails on both attempted routes, with probability (1 - Bft,in) + B:i,joB!t,jl. Together with similar relations when the chain is in state 1, we have the following transition matrix for the Markov chain describing the state 0 or 1 of parent i t :

GIBBENS et al.: DYNAMIC ROUTING IN MULTIPARENTED NETWORKS 269
The Markov chain has stationary distribution [3] P. Chemouil, J. Filipiak, and P. Gauthier, “Performance issues in the design of dynamically controlled circuit-switched networks,” IEEE Comun. Mag., vol. 28, no. 10, Oct. 1990.
[4] R. J. Gibbens and F. P. Kelly, “Dynamic routing in fully connected networks,” IMA J. Math. Conr. In t , vol. 7, pp. 77-1 11, 1990.
I1 ~ R I \ R 2 151 R. J. Gibbens, F. P. Kelly, and P. B. Key, “Dynamic alternative
(1 -B! . )B? . Z t J 0 z t . 3 1
T i c i j ( 0 ) = (1 - B:t,jo)B:t,jl + ( 1 - B:c,jl)Bt,jo _ . \I - U ’
Z t J 1 t d o
z t , j i ) U i t , j o routing-Modelling and behaviour,” in Proc. 12th In; Teletrafi Congr., Turin, Italy, 1988.
[6] R. J. Gibbens and S. R. E. Turner, “Sticky random routing in dual- parented networks,” in Pmc. Eighth UK Teletrafic Symp., London,
T a t ” ( 1 ) = ( 1 - B1 . )B’ . + (1 - B;’,j,)Bt,jl ‘ (*)
These are the proportions of calls to node j which parent it England, 1991.
networks,” Electron. and Commun. Enn. J., Dec. 1990. [7] I. Hawker, “Future trends in digital telecommunication transmission
first attempts via j o and j1, respectively. The probability that a call from node i to node j offered
via parent it fails is [8] B. Hennion, “Feedback methods for calls allocation on the crossed traffic routing,” in Proc. 9th Int. Teletraffic Congr., Torremolinos, Italy, Oct. 1979.-
[9] P. J. Hunt and F. P. Kelly, “Strategic issues in the design of circuit- switched networks,” Rep. BT by the Stochast. Netw. Group, Cambridge, England, 1987.
[IO] P. J. Hunt and C. N. Laws, “Asymptotically optimal loss network control,” Maths of Operut. Res., to appear.
[ 111 “Advanced traffic control methods for circuit switched telecommunica- tions networks,” IEEE Commun. Mag., vol. 28, no. 10, Oct. 1990.
[I21 A. R. Ingham and A. M. Elvidge, ‘Trunk reservation with automatic al- ternative routing,’’ in Proc. Sixth UK Teletrufic Symp., London, England,
l i , j ( t ) = Tit,j(0)Bi2t,joBilt,jl + ~ i ~ , j ( l ) ~ i 2 ~ , j ~ ~ i l ~ , ~ ~ . (9)
The number of calls from node i to node j offered to parent it, before a failure causes a switch to the other parent, is geometrically distributed with parameter li,j ( t ) and thus l<j(t). Therefore, the proportion of calls from node to node
that are attempted via parent io is
Now we can calculate the high- and low-priority traffic offered to each link and solve the fixed point equations to calculate the probability of a call being blocked in an analogous way to the lastchance case.
It is straightforward to extend the above analysis to a multiparented network under a variety of possible schemes. We consider one example: suppose that 0,1, . . . , L - 1 label the parents for node j that can be reached from i, and write v(k) = (s + k) mod L. If the current state of parent i, for calls to node j is s, suppose that the call is first offered to link i,, at low priority, then to links i , ,v ( l ) l i,,v(2)l . . . , i,,u(m-l) at low priority, and finally to link i,,v(m) at high priority, where m 5 L - 1. If the call fails at all of these, the state becomes v(m+l). The transition matrix P describing the Markov chain is easily calculated. For example,
m-1
k=O
The stationary distribution of the L-state Markov chain gives the proportion of calls to node j which parent i, first attempts via the nodes labeled 0 , 1 , . . L - 1. Clearly, many variants, involving random orderings or different priorities, can be similarly analyzed.
ACKNOWLEDGMENT
The authors wish to thank the reviewers for their many useful comments.
REFERENCES
[I] G. R. Ash, J .4 . Chen, A. E. Frey, and B. D. Huang, “Real-time network routing in a dynamic class-of-service network,” in Proc. 13th Int. Teletrajfc Congr., Copenhagen, June 1991.
[2] G. R. Ash, F. Chang, D. Medhi, “Robust traffic design for dynamic routing networks,” in Proc. IEEE INFOCOM, 1991.
1989. [I31 A. Inoue, H. Yamamoto, and Y. Harada, “An advanced large-scale sim-
ulation system for telecommunication networks with dynamic routing,” Nehvorks, vol. 89, pp. 77-82, Sept. 1989.
[I41 F. P. Kelly, “Routing and capacity allocation in networks with trunk reservation,” Math. Oper. Res., vol. 15, pp. 771-793, 1990.
[I51 F. P. Kelly, “Loss networks,” Ann. Appl. Prob., vol. 1, pp. 317-378, 1991.
[ 161 P. B Key and G. A. Cope, “Distributed dynamic routing schemes,” IEEE Commun. Mag., vol. 28, no. 10, Oct. 1990.
[I71 P. B. Key and A. Elvidge, “Design and analysis of a highly reliable transmission network,” in Proc. 13th Int. Telerrafic Congr., Copenhagen, June 1991.
[I81 S. A. Lippman, “Applying a new device in the optimization of expo- nential queueing systems,” Oper. Res., vol. 23, pp. 686710, 1975.
[ 191 B. Miller, “A queueing system with several customer classes,” Manage- ment Sci., vol. 16, pp. 234-245, 1969.
(201 D. Mitra, R. J. Gibbens, and B. D. Huang, “Analysis and optimal design of aggregated-least-busy-alternative routing on symmetric loss networks with trunk reservations,” in Proc. 13th Int. Teletrafic Congr., Copenhagen, June 1991.
[21] D. Mitra, R. J. Gibbens, and B. D. Huang, “State-dependent routing on symmetric loss networks with trunk reservations: I,” IEEE Trans. Commun. to appear.
[22] D. Mitra and R. J. Gibbens, “State-dependent routing on symmetric loss networks with trunk reservations, 11: Asymptotics, optimal design,” Annuls of Operut. Res., vol. 35, pp. 3-30, 1991.
[23] D. Mitra and J. B. Seery, “Comparative evaluations of randomized and dynamic routing strategies for circuit-switched networks,” IEEE Trans. Commun., vol. 39, pp. 102-1 16, 199 1.
[24] M. ploro, M. de Miguel, and I. Pita, ‘Telecom networks evolution towards secure dynamic structures,” in Int. Teletrufic Congr. Specialists’ Sem., Cracow, Poland, 1991.
[25] S. M. Ross, Introduction to Stochastic Dynamic Programming. New York: Academic, 1983.
[26] R. R. Stacey and D. J. Songhurst, “Dynamic alternative routing in the British Telecom trunk network,” in Proc. Inr. Switching Symp., Phoenix, AZ. 1987.
Richard J. Gibbens received the B.A. degree in mathematics, the Diploma in mathematical statistics, and the Ph.D. degree from the University of Cam- bridge, Cambridge, England, in 1983, 1984, and and 1988, respectively.
Since 1988, he has worked as a Research Asso- ciate in the Statistical Laboratory at the University of Cambridge. His research interests are in the area of mathematical modeling of telecommuni- cation systems, especially the design of dynamic routing schemes. He is a coinventor of the Dynamic
Alternative Routing (DAR) strategy.
r

270
Frank P. Kelly received the B.Sc. degree from the University of Durham in 1971 and the Ph.D. degree from the University of Cambridge in 1976.
He is now Professor of the Mathematics of Sys- tems and Director of the Statistical Laboratory at the University of Cambridge. His main research interests are in random processes, networks and optimization, and especially in applications to the design and control of communication networks. He is a coinventor of the Dynamic Alternative Routing (DAR) strategy. He has been awarded the Guy
Medal in Silver of the Royal Statistical Society, the Lanchester Prize of the Operations Research Society of America, and is a Fellow of the Royal Society.
IEEWACM TRANSACTIONS ON NETWORKING, VOL. I , NO. 2, APRIL 1993
Stephen R.E. l b " r received the B.A. degree in mathematics from the University of Cambridge in 1991.
He is currently studying for the Diploma in Mathematical Statistics in the Statistical Laboratory at the University of Cambridge, where he intends to contiriue his interests in stochastic networks by com- mencing research for the Ph.D. degree in October 1983.
- ---I- --