Dynamic Modeling and Analysis of Human Locomotion … · Dynamic Modeling and Analysis of Human...
9
Dynamic Modeling and Analysis of Human Locomotion using Multibody System Methodologies Fernando Meireles 1 , Margarida Machado 1 , Miguel Silva 2 Paulo Flores 1 1 Departamento de Engenharia Mecânica, Universidade do Minho, Campus de Azurém, 4800-058 Guimarães, Portugal 2 Departamento de Engenharia Mecânica, Instituto Superior Técnico, IST/IDMEC, Av. Rovisco Pais 1, 1049-001 Lisboa, Portugal This paper deals with the development and implementation of a general and comprehensive methodology for dynamic modeling and analysis of human locomotion based on the multibody systems approach. It is known that the dynamic analysis of the human gait usually requires three types of input data namely: (i) anthropomorphic information regarding the dimensions and weight of the anatomical segments; (ii) kinematic information used to describe its motion in a unique manner; (iii) and kinetic information describing all external applied forces to the biomechanical model and their respective points of application. In this work the kinematic equations of motion and the full characterization of the biomodels are developed by using Cartesian coordinates. In particular, the biomechanical model used here composed by seven rigid bodies, corresponding to the main anatomical segments. The bodies are connected by six revolute joints. The trajectories of all the bodies that represent the systems’ degrees of freedom have guide constraints associated, which are obtained experimentally. The motion data of the biomechanical system consists of the trajectory of a set of anatomical points located at the natural joints. The collected data points are then interpolated using cubic splines in order to define the necessary mathematical expressions that represent that guide constraint equations. Furthermore, a set of external forces applied to the biomodel as well as respective points of application are acquired by a pressure platform that reads the reaction forces between the ground and feet segments. The methodologies developed here are implemented into computational codes devoted to the kinematic and dynamic analysis of general multibody systems. Finally, some results are presented and analyzed in order to discuss the main procedures and assumptions adopted in this work. Keywords: Multibody systems, Dynamics, Biomechanical model, Human locomotion 1. INTRODUCTION In a broad sense, the biomechanics of motion has three fundamental objectives. The first one is related to the motion variables’ identification of the system under analysis. The second objective seeks to understand the dependency between the motion variables and the biomodel performance. Finally, biomechanics aims to apply design and optimization procedures of biomechanical systems. Thus, taking into account the development of science and engineering towards people’s welfare, it becomes essential to develop computational tools that are able to predict the kinematic and dynamic behavior of biomechanical systems [1, 2]. It is well known that computational simulation of the human motion requires that development and implementation of suitable mathematical models that correctly describe the behavior of the human body and its interaction with the surrounding environment. In a general way, there are essentially two major classes of biomechanical models namely: ( i) the models described using finite element methods and ( ii ) the models developed under the framework of multibody systems formulations. Finite element methods are applied in cases where localized structural deformations of soft tissues need to be analyzed in detail, while the multibody models are usually used in cases where gross-motions are involved and when complex interactions with surrounding environment are expected. Human gait as a gross-motion simulation is, in general, described using multibody systems methodologies [1]. Over the last years, the study and characterization of the human body motion has deserved the attention of the academic and scientific communities [3-5]. In these studies, the geometrical and physical properties of bones, muscles, tendons, etc., that constitute the biomechanical models have been taken into account in the development of computational approaches. In addition, the correlation between numerical and experimental results has been studied by a good number of research works [6-8]. The study of human body motion as a multibody systems is a challenging research field that has undergone enormous recent developments that finds application in several activities, such as (i) analysis of top athletic actions to improve different sporting performances; (ii) optimization of the design of sportive equipment; ( iii ) ergonomic studies to assess operating conditions for complex and efficiency in different aspects of the human body interactions with the environment; ( iv) orthopedics to improve the design and analysis of medical auxiliary devices; ( v ) occupant dynamic analysis for International Journal of Computational Vision and Biomechanics Vol.2 No. 2 (July-December, 2016)
Transcript of Dynamic Modeling and Analysis of Human Locomotion … · Dynamic Modeling and Analysis of Human...

International Journal for Computational Vision and Biomechanics, Vol. 2, No. 2, July-December 2009
Serials Publications © 2009 ISSN 0973-6778
Dynamic Modeling and Analysis of Human Locomotion usingMultibody System Methodologies
Fernando Meireles1, Margarida Machado1, Miguel Silva2 Paulo Flores1
1Departamento de Engenharia Mecânica, Universidade do Minho, Campus de Azurém, 4800-058 Guimarães, Portugal2Departamento de Engenharia Mecânica, Instituto Superior Técnico, IST/IDMEC, Av. Rovisco Pais1, 1049-001 Lisboa, Portugal
This paper deals with the development and implementation of a general and comprehensive methodology for dynamicmodeling and analysis of human locomotion based on the multibody systems approach. It is known that the dynamic analysisof the human gait usually requires three types of input data namely: (i) anthropomorphic information regarding the dimensionsand weight of the anatomical segments; (ii) kinematic information used to describe its motion in a unique manner; (iii) andkinetic information describing all external applied forces to the biomechanical model and their respective points of application.In this work the kinematic equations of motion and the full characterization of the biomodels are developed by using Cartesiancoordinates. In particular, the biomechanical model used here composed by seven rigid bodies, corresponding to the mainanatomical segments. The bodies are connected by six revolute joints. The trajectories of all the bodies that represent thesystems’ degrees of freedom have guide constraints associated, which are obtained experimentally. The motion data of thebiomechanical system consists of the trajectory of a set of anatomical points located at the natural joints. The collected datapoints are then interpolated using cubic splines in order to define the necessary mathematical expressions that representthat guide constraint equations. Furthermore, a set of external forces applied to the biomodel as well as respective points ofapplication are acquired by a pressure platform that reads the reaction forces between the ground and feet segments. Themethodologies developed here are implemented into computational codes devoted to the kinematic and dynamic analysis ofgeneral multibody systems. Finally, some results are presented and analyzed in order to discuss the main procedures andassumptions adopted in this work.
Keywords: Multibody systems, Dynamics, Biomechanical model, Human locomotion
1. INTRODUCTION
In a broad sense, the biomechanics of motion has threefundamental objectives. The first one is related to themotion variables’ identification of the system underanalysis. The second objective seeks to understand thedependency between the motion variables and thebiomodel performance. Finally, biomechanics aims toapply design and optimization procedures ofbiomechanical systems. Thus, taking into account thedevelopment of science and engineering towards people’swelfare, it becomes essential to develop computationaltools that are able to predict the kinematic and dynamicbehavior of biomechanical systems [1, 2]. It is well knownthat computational simulation of the human motionrequires that development and implementation of suitablemathematical models that correctly describe the behaviorof the human body and its interaction with thesurrounding environment. In a general way, there areessentially two major classes of biomechanical modelsnamely: (i) the models described using finite elementmethods and (ii) the models developed under theframework of multibody systems formulations. Finiteelement methods are applied in cases where localizedstructural deformations of soft tissues need to be analyzedin detail, while the multibody models are usually used in
cases where gross-motions are involved and whencomplex interactions with surrounding environment areexpected. Human gait as a gross-motion simulation is, ingeneral, described using multibody systemsmethodologies [1].
Over the last years, the study and characterization ofthe human body motion has deserved the attention of theacademic and scientific communities [3-5]. In thesestudies, the geometrical and physical properties of bones,muscles, tendons, etc., that constitute the biomechanicalmodels have been taken into account in the developmentof computational approaches. In addition, the correlationbetween numerical and experimental results has beenstudied by a good number of research works [6-8]. Thestudy of human body motion as a multibody systems is achallenging research field that has undergone enormousrecent developments that finds application in severalactivities, such as (i) analysis of top athletic actions toimprove different sporting performances; (ii) optimizationof the design of sportive equipment; (iii) ergonomicstudies to assess operating conditions for complex andefficiency in different aspects of the human bodyinteractions with the environment; (iv) orthopedics toimprove the design and analysis of medical auxiliarydevices; (v) occupant dynamic analysis for
International Journal of Computational Vision and Biomechanics Vol.2 No. 2 (July-December, 2016)

200 International Journal for Computational Vision and Biomechanics
crashworthiness and vehicle safety related research anddesign; (vi) gait analysis for generation of normal gaitpatterns and consequent diagnosis of pathologies anddisabilities [9-14].
The present work deals with the development andimplementation of a general and comprehensivemethodology to dynamic modeling and analysis ofbiomechanical systems using a two-dimensionalmultibody systems approach. Although, the six majordeterminants of human gait (hip, knee and ankle flexion-extension, pelvic rotation, pelvic list and lateral pelvicdisplacement) can only be studied in three-dimensionalmodels, the development of two-dimensional models ismuch more simple and can still be useful concerning tothe evaluation of the joint flexion-extension motions andjoint sagittal moments. This is true since the goal of thelocomotion is to propel the body in the plane ofprogression, while supporting the body against the gravityaction, the major motion portion of analysis performedin the sagittal plane. In this work, the equations of motionand the human biomodel description are developed byusing Cartesian coordinates. The trajectories of theanatomical segments that guide the biomodel are obtainedfrom experimental data acquisition, in which relevantanatomical points of reference are marked and followedduring the system’s motion. These points are typicallyrepresentative of natural joints. After obtaining the datarelative to the human gait motion, the set of pointsacquired are filtered and then interpolated using cubicsplines functions in order to define the necessarymathematical expressions that represent the guideconstraint equations. Numerical results obtained fromsome computational simulations are used to discuss theassumptions and procedures adopted in this study.
2. EQUATIONS OF MOTION FORCONSTRAINED MULTIBODY SYSTEMS
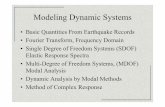
In order to analyze the dynamic response of a constrainedmultibody system, it is first necessary to formulate theequations of motion that govern its behavior. Theformulation of multibody system dynamics adopted inthis work follows closely that of Nikravesh [15], in whichthe generalized Cartesian coordinates and the Newton-Euler’s approach are employed to derive the system’sequations of motion. Figure 1 depicts a multibody system,which consists of a collection of rigid and/or flexiblebodies interconnected by kinematic joints and possiblysome force elements. The kinematic joints control therelative motion between the bodies, while the forceelements represent the internal forces that developbetween bodies due to their relative motion. The forcesapplied over the system components may be the result ofsprings, dampers, actuators or external forces, such asthose developed between colliding bodies.
When the configuration of a multibody system isdescribed by nc Cartesian coordinates, then a set of malgebraic kinematic independent constraints can bewritten in a compact form as [15],
(q, t) = 0 (1)
where q is the vector of generalized coordinates and t isthe time variable.
The velocities and accelerations of the systemelements are evaluated using the velocity and accelerationconstraint equations. Thus, the first time derivative withrespect to time of Equation (1) provides the velocityconstraint equations,
t� � �qΦ q Φ υ� (2)
where q is the Jacobian matrix of the constraint
equations, q� is the vector of generalized velocities and
is the right hand side of velocity equations.
A second differentiation of Equation (1) with respectto time leads to the acceleration constraint equations,obtained as,
t tt( ) 2� � � � �q q q qΦ q Φ q q Φ q Φ γ�� � � � (3)
where q�� is the acceleration vector and is the right hand
side of acceleration equations.
The equations of motion for a constrained multibodysystem of rigid bodies are written as [15],
( )� � cMq g g�� (4)
where M is the system mass matrix, q�� is the vector that
contains the system accelerations, g is the generalizedforce vector and g(c) is the vector of constraint reactionequations. The joint reaction forces can be expressed interms of the Jacobian matrix of the constraint equationsand the vector of Lagrange multipliers as [15],
( ) T� �cqg Φ λ (5)
Figure 1: Generic configuration of a multibody system
Revolute joint
Spherical joint
Spring
Body 1
Body n
Body 3
Ground body
Revolute jointwith clearance
Actuator
Lubricated joint
Contact bodies
Applied torque
Flexible bodyGravitational forcesOther applied forces
Body i
Body 2
Revolute joint
Spherical joint
Spring
Body 1
Body n
Body 3
Ground body
Revolute jointwith clearance
Actuator
Lubricated joint
Contact bodies
Applied torque
Flexible bodyFlexible bodyGravitational forcesOther applied forces
Body i
Body 2

Dynamic Modeling and Analysis of Human Locomotion using Multibody System Methodologies 201
where is the vector that contains m unknown Lagrangemultipliers associated with m constraints. The Lagrangemultipliers are physically related to the reaction forcesand moments generated between the bodiesinterconnected by kinematic joints. Thus, substitution ofEquation (5) in Equation (4) yields,
T� �qMq Φ λ g�� (6)
In dynamic analysis, a unique solution is obtainedwhen the acceleration constraint equations are consideredsimultaneously with the differential equations of motion,for a proper set of initial conditions. Therefore, Equation(3) is appended to Equation (6), yielding a system ofdifferential algebraic equations (DAE). Thus,mathematically the simulation of constrained mechanicalsystem requires the solution of a set of nc differentialequations coupled with a set of m algebraic equation,written as,
T� � � � � ��� � � � � �
� � � �� �
q
q
M Φ q g
Φ 0 λ γ
��(7)
This system of equations is solved for q�� and . Then,
in each integration time step, the accelerations vector,
q�� , together with velocities vector, q� , are integrated in
order to obtain the system velocities and positions forthe next time step. This procedure is repeated up to finaltime analysis time is reached. The Baumgarte stabilizationmethod [16] is used to ensure the stabilization of theconstraint violation associated with the kinematicconstraints of the ideal joints. Note that the equations ofmotion may exhibit a stiff behavior, and therefore,integration algorithms such as the one proposed by Gear[17] are preferred for the numerical solution of theproblem.
Figure 2 presents a flowchart of computationalstrategy for dynamic analysis of multibody systemsincluding contact analysis. At t = t0, the initial conditions
on q0 and 0q� are required to start the integration process.
These values cannot be specified arbitrarily, but mustsatisfy the constraint equations defined by Equations (1)and (2).
The direct integration algorithm presented in Figure2 can be summarized by the following steps:
(i) Start at instant of time t0 with given initial
conditions for positions q0 and velocities 0q� .
(ii) Assemble the global mass matrix M, evaluatethe Jacobian matrix
q, construct the constraint
equations , determine the right hand side ofthe accelerations , and calculate the forcevector g.
(iii) Solve the linear set of the equations of motion(7) for a constrained mechanical system in order
to obtain the accelerations q�� at time t and the
Lagrange multipliers .
(iv) Assemble the vector ty� containing the
generalized velocities q� and accelerations q�� for
instant of time t.
(v) Integrate numerically the q� and q�� for time step
t+Dt and obtain the new positions and velocities.
(vi) Update the time variable and go to step (ii) andproceed with the process for the new time step.Perform these steps until the final time ofanalysis is reached.
3. BIOMECHANICAL MODEL DESCRIPTION
In this section a biomechanical model of the human body,used in a forward dynamic analysis of the stride period,is presented. This model is developed and analyzed withina general purpose multibody code that uses amethodology based on multibody systems formulations[15]. Figure 3 shows a schematic representation of thebiomechanical model considered here. The model iscomposed by seven rigid bodies, in which six of themcorrespond to the locomotor system (the two legs – thigh,shank, foot) and one that represents the remaining mainbody segments here denominated by HAT (acronym forHead-Arms-Trunk). The present study only accounts forthe skeletal structure, being the effect of muscles, tendonsand ligaments neglected.
In order to define the configuration of a planar body,three independent coordinates are needed, namely, twocoordinates specify translation and one specify rotation.Since the model used here is two-dimensional, it has atotal of 21 coordinates, which results from three
Figure 2: Flowchart of computational procedure for dynamicanalysis of multibody systems
STOP
Δt t t� �
Yes
No
Read input
0
0
0
t
t
t t�
�
�
q q
q q� �
Evaluate
Mass matrix MJacobian matrix Фq
Position constraints ФVector Generalized forces g
Δ [ ]T T Tt t� �y q q�
Integrate the auxiliary vector
is t>tend?
START
Solve for and T� � � � � �
�� � � � � �� � � � � �� �
q
q
M Φ q g
Φ 0 λ
��
Form the auxiliary vector
[ ]T T Tt �y q q� ���
q��
STOPSTOP
Δt t t� �
Yes
No
Read input
0
0
0
t
t
t t�
�
�
q q
q q� �
Read input
0
0
0
t
t
t t�
�
�
q q
q q� �
Evaluate
Mass matrix MJacobian matrix Фq
Position constraints ФVector Generalized forces g
Evaluate
Mass matrix MJacobian matrix Фq
Position constraints ФVector Generalized forces g
Δ [ ]T T Tt t� �y q q�
Integrate the auxiliary vector
Δ [ ]T T Tt t� �y q q�
Integrate the auxiliary vector
is t>tend?is t>tend?
STARTSTART
Solve for and T� � � � � �
�� � � � � �� � � � � �� �
q
q
M Φ q g
Φ 0 λ
��
Form the auxiliary vector
[ ]T T Tt �y q q� ���
Form the auxiliary vector
[ ]T T Tt �y q q� ���
q��

202 International Journal for Computational Vision and Biomechanics
coordinates for each body (7x3=21). An anthropometricdescription of the seven anatomical segments and theircorresponding bodies is listed in Table 1 [6]. The relevantanthropometric information is the length, center-of-mass(CM) location, mass and moment of inertia of eachanatomical segment.
Table 1Anthropometric Data for each Anatomical Segment of the
Biomechanical Human Model [6]
Segment Description Length CM Proximal Mass Moment of[m] Loc.[m] [Kg] Inertia
[Kg.m2]
1 ½ HAT 0.2575 -0.0355 19.2213 1.03923
2 Right Thigh 0.3141 0.1360 5.67000 0.05836
3 Right Shank 0.4081 0.1840 2.63655 0.04005
4 Right Foot 0.1221 0.0610 0.82215 0.00273
5 Left Thigh 0.3141 0.1360 5.67000 0.05836
6 Left Shank 0.4081 0.1840 2.63655 0.04005
7 Left Foot 0.1221 0.0610 0.82215 0.00273
The length of each anatomical segment is consideredto be a straight line between adjacent articular joints. Thecenter-of-mass locations are expressed with respect to
the proximal joints for all segments, except for the ½HAT. The center-of-mass of this body is located 0.0355m above its proximal end, which leads to a negative value,as listed in Table 1. The center-of-mass positions arecalculated using anthropometric relations between thesegment length and the center-of-mass proximal location.Thus, for example, the right thigh center-of-massproximal location is obtained multiplying 0.314 m (thetotal segment length) by 0.433 (the proximalanthropometric relation constant for thigh) resulting0.1360 m [2,6]. The mass is also obtained as a relationbetween total body weight and a partial weightanthropometrical relation. Regarding the right thighexample, its mass, 5.670 kg is a result of 56.70 kg × 0.1.Finally, the segment massic moment of inertia is givenby,
I = m�2 (8)
where m is the segment mass, and � is the radius ofgyration. This radius of gyration can be seen as ananthropometric value that represents the arm of themoments applied in the segment’s center-of-mass.Proceeding with the same example, as previously, themassic moment of inertia is evaluated as 5.670 × (0.314× 0.323)2 = 0.05836 Kg.m2.
In the biomechanical model considered in the presentstudy, the anatomical segments are connected by sixrevolute joints, which results in twelve constraints in thesystem. Thus, including these constraints to system, leadsto nine degrees of freedom (DOF). It should be notedthat these nine degrees of freedom correspond to sixrotations about revolute joints axis, plus two translationsand one rotation of the main body (½ HAT). These nineDOF are associated with the guiding constraints presentedand discussed in what follows.
In general, the motion of one or more bodies in amultibody system can be prescribed, that is, the systemis guided typically by rotational or translational actuators.Other type of guiding constraints are those associatedwith the known trajectories of the bodies’ center-of-mass,which can be obtained by experimental data acquisition[1,2]. Table 2 shows the typical data collectedexperimentally for the center-of-mass of a body, wherethe Cartesian coordinates’ variation with time is presented[2]. In this work the driving constraint equations thatguide the body’s center-of-mass along the time arederived. Figure 4 shows an unconstrained body thatdescribes a general planar motion. For a free body inplanar space, the mathematical equation that representsthe three guiding constraint can be written as,
� �� �� �
( ,3) 0
xi i
g yi i
i i
x t t
y t t
t t�
� ��� �� � �� �� �� �� �
Φ(9)
Figure 3: Two-dimensional biomechanical model

Dynamic Modeling and Analysis of Human Locomotion using Multibody System Methodologies 203
where, ( )( , , )jit t j x y� � represents the trajectory
described by the center-of-mass of body i. This Equationcan be considered as a variety of kinematic independentholonomic and rheonomic constraints represented byEquation (1).
Knowing the Jacobian matrix, the velocities of thebodies are evaluated using the velocity constraintEquation (2) after evaluation of the right hand side ofvelocity equations as,
31 2
t t t
�� �� � � �
� � �ΦΦ Φ
(11)
Finally, the right hand side of acceleration iscalculated to further evaluation of bodies’ accelerationobtained by using the acceleration constraint Equation(3),
22 231 2
2 2 2t t t
�� �� � � �
� � �ΦΦ Φ
(12)
In addition to development of the guiding constraintsformulation, it is also necessary to know the kineticinformation describing the interaction between thebiomechanical model and its surrounding environmental,namely the external applied forces on the feet, as well astheir respective points of application [1].
The values of the contact forces between the groundand feet are obtained experimentally [2]. Further, it isknow that the point of application of these contact forcesvaries with time during the interaction between the footand the ground along stance period. This issue is ofparamount importance to obtain good results, as it waspointed out [19]. Thus, in order to correctly define thepoint of application of reaction forces in the system, it isnecessary to calculate the local coordinates of this pointin relation to the foot’s center-of-mass.
Figure 5 represents a generic configuration of thepoint of application of the reaction forces developedbetween the foot and ground. The global coordinates ofthe contact point are given by,
'4 4 4 4 4 4P P Pr r s r A s� � � � (13)
Figure 4: General planar motion of an unconstrained body i
� �tt ji
X
Y
� �tt ji � �tt ji
X
Y
Since the body’s trajectory of center-of-mass, or anyanatomical point is typically discrete and obtainedexperimentally, in general, the data collected are used toderive the mathematical expressions by interpolating thecoordinates along time. In this study, this procedure isobtained by employing cubic splines interpolation,because higher order polynomials tend to swing throughwild oscillations in the vicinity of an abrupt change,whereas cubic splines provides much more smoothtransitions [18]. Furthermore, the use of cubic splines isquite useful to ensure the continuity of the first and thesecond derivatives, velocity and acceleration respectively,property that is extremely important in the kinematic anddynamic analysis procedures.
Table 2Example of Cartesian coordinates along with time
for the ½ HAT segment [2]
Time [s] CMx [m] CMy [m] CMf [rad]
0.0000 0.472660 1.079970 1.485270
0.0290 0.512384 1.082187 1.504467
0.0580 0.550632 1.088482 1.515225
… … … …
0.9280 1.791159 1.079529 1.413648
0.9570 1.835584 1.077620 1.447559
In order to perform kinematic and dynamic analysisit is fast necessary to evaluate the Jacobian matrix. Thus,the Jacobian matrix of the guiding constraint equations,
q, is obtained by differentiating the Equation (9) with
respect to the coordinates, which can be expressed as,
1 1 1 2 2 2
1 1 1 2 2 2
3 3 3
3 3 3
x y x y
x y
� � � �� � � � � ��� � � � � � �� � � �� � � �� � � ��� � � �
� �� � �� � �� �� � ��� �
q
Φ Φ Φ Φ Φ ΦΦΦ
q
Φ Φ Φ
(10)
Figure 5: Generic configuration of the point of application ofreaction forces developed between the ground and thefoot

204 International Journal for Computational Vision and Biomechanics
Moreover, the components of the applied externalforces, here designated by F
x and F
y, have to be transferred
to the foots’ center-of-mass. The transferred forces andmoments are then added to the generalized force vectorof the foots’ center-of-mass, resulting in the forcecomponents F
x and F
y and a moment n
4, as it is
schematically shown in Figure 6.
The methodology proposed in this section to modelthe guiding constraints associated with bodies’trajectories, as well as that relative to the evaluation of
foot-ground contact forces was implemented in DABIOSFORTRAN code (DABIOS, acronym for DynamicAnalysis of BIOmechanical Systems), which is acomputational program developed with the purpose toperform kinematic and dynamic analysis of generalmultibody systems [2].
4. RESULTS AND DISCUSSION
In order to validate the methodologies presented andimplemented in the DABIOS code, the anthropometric,kinematic and kinetic information of the biomechanicalmodel presented in the previous is prescribed as inputdata. This data was presented by Winter [6], andrepresents a time period of 0.957seconds related to acomplete gait cycle of normal cadence. The first timeperiod, [0.0, 0.4]s corresponds to the swing period, andthe second, [0.4, 1.0]s corresponds to stance period [2].
First of all the kinematic analysis was performed,that is, position, velocity and acceleration output datafrom DABIOS were evaluated by prescribing publisheddata from Winter [6]. Figure 7 shows the global resultsobtained by using the DABIOS code, which are comparedto those reported by Winter [6] for body 1, the ½ HAT.Both for position and for velocity, the obtained data fromDABIOS are perfectly consistent, yet some oscillation ispresented around acceleration data.
Figure 6: External forces applied to the ground and theirresultants in the foot’ center-of-mass
Figure 7: Comparative analysis between DABIOS and Winter’s kinematic data [6] - (a) Position CM-x; (b) Position CM-y;(c) Position CM-f; (d) Velocity CM-x; (e) Velocity CM- ; (f) Velocity CM- ; (g) Acceleration CM-x; (h) Acceleration CM-y; (i) Acceleration CM- . All these plots represent the data obtained for ½ HAT segment (body 1), yet they are representativeof the data obtained for the whole biomechanical model

Dynamic Modeling and Analysis of Human Locomotion using Multibody System Methodologies 205
In addition to the kinematic analysis, a dynamic studyof the biomechanical model was conducted using theDABIOS code. Thus, joint reaction forces and articularmoments were evaluated. The joint reaction forces (bone-on-bone forces or joint contact forces) were obtaineddirectly from the data produced by DABIOS code. Theseoutput values were compared to the data reported byWinter [6], for the same input, as it is shown in Figure 8.For ankle and knee it was verified that the reactions forcevalues are similar to those predicted, being the correlationaround 99.5% for ankle and for knee joints. For the hipvertical reaction forces (R
y) the correlation observed was
also above 99.5%, yet, for the hip horizontal reactionforces (R
x) the obtained values differed from the predicted
in nearly 3%. This fact can be understood as aconsequence of a poor definition of HAT segment,regarding mass and moment of inertia values.Furthermore, this difference results from the lack of datarelated to the left leg (bodies 5, 6 and 7). Thus, only theright leg + HAT (bodies 1 to 4) data was prescribed inthe DABIOS program. Therefore, there are forces implicitin the HAT segment that can not be considered, resultingin a lack of accuracy in the hip reaction forces calculation.Finally, all the three R
x plots present a divergence of the
obtained data in the initial and terminal ends. Thesedeviations are related to lack of accuracy in interpolationof the edge pieces of the cubic splines (see the same errorsin Figure 7 (g), (h) e (i), and consider that these deviationsin acceleration calculation will imply errors in forcescalculation). This problem can be overcome with theaddiction of residual data in the terminal ends of theconsidered interpolation data.
Regarding to articular moments evaluation, theequations of motion, for an unconstrained rigid body ina two dimensional space have to be considered. Free bodydiagrams were taken into consideration in the calculationof the joints’ moments-of-force. Thus, applying theequations of motion to each free body diagramresults [2],
CMankle x y y x footn F b F b n� � � � � (14)
CMknee x y y x shank anklen F b F b n n� � � � � � (15)
CMhip x y y x thigh kneen F b F b n n� � � � � � (16)
The joints’ moments-of-force variation during theprescribed gait cycle, obtained by Equations (14), (15) e(16), are illustrated in Figure 9. Both for ankle, knee andhip joint moments-of-force, the obtained values (plottedas solid lines) are compared with the predicted ones [6].The plots display a good correlation for ankle and forknee, yet for hip, the results are poor, because there is anexcessive lack of accuracy in the terminal ends of theplot, and more significantly, the plot presents a wildoscillation in the beginning of stance period (0.4s). Thepredicted values present a huge variation at this instantof time (from 11.7 to 54.4 N.m/Kg), resulting in a poorresponse in the calculated data. This poor response isvisible by a smooth transition of the moments-of-forcevalues between swing and stance period, and by afollowing oscillatory response ([0.4, 0.6]s) that can be aconsequence of interpolation problems.
In summary, the results obtained show a goodcorrelation with the predicted ones both for joint reactionforces and moments-of-force, exception made for hip
Figure 8: Comparative analysis between Joints Reaction Forcesfrom DABIOS code and Ground Reaction Forces fromWinter [6] - (a) X-reaction forces; (b) Y-reaction forces

206 International Journal for Computational Vision and Biomechanics
articular moment. Nevertheless, it should be noted thatsubstantial amount of work is done in the frontal planeat hip joint (hip adduction/abduction moments-of-force)which can result in poor accuracy in a two-dimensionalsagital analysis.
5. CONCLUDING REMARKS
In this work a general and comprehensive methodologyto perform kinematic and dynamic analysis of humanlocomotion has been presented and analyzed. In theprocess, the main issues related to multibody systemsmethodology were reviewed and discussed in the contextof two-dimensional biomechanics of movement.
The methodology developed was implemented andvalidated by comparing the results for kinematic anddynamic analysis of a human gait biomechanical obtainedto the data available in the literature. In general, the globalresults were acceptable and corroborated by the bestpublished literature of this research field. However, therewere some differences in what concerns to the bodies’accelerations, as a result of the cubic spline interpolationerrors, which affect the systems’ dynamic response.
The study of human motion and the calculation ofreaction forces and net moments-of-force developed atthe joints of a subject during the execution of specifiedphysical tasks are of major importance in many areas such
as biomedical engineering, physical rehabilitation,ergonomics, and several fields of biomechanics such asimplant design. The general methodology developed inthis work is expected to be a potential application in theseareas, as it can be applied to a set of two-dimensionalbiomechanical models of human motion. As future work,some important issues can be considered, namely theinclusion of the muscle actuators in the systemformulation, intending to study their activation, as wellas their contribution to the joints’ moments-of-force, thevaluation of the sensibility of the proposed methodologyto gait pathological cases. For this to be possible, somefuture experimental trials need to be performed tocompare the sensibility of this two-dimensionalmethodology with the software currently available in themarket.
ACKNOWLEDGMENTS
The support of the Fundação para a Ciência e a Tecnologia withinthe project PTDC/EME-PME/67687/2006 entitled ‘PROPAFE –Design and Development of a Patello-Femoral Prosthesis’ is gratefullyacknowledged. The second author work would like to thank thesupported by Fundação para a Ciência e a Tecnologia through thegrant SFRH/BD/40164/2007.
REFERENCES
[1] Silva, M., Human motion analysis using multibody dynamicsand optimization tools, PhD Dissertation, Technical Universityof Lisbon, Lisbon, Portugal, 2003.
[2] Meireles, F. Kinematics and dynamics of biomechanical modelsusing multibody systems methodologies: A computational andexperimental study of human gait, MSc Dissertation, Universityof Minho, Guimaraes, Portugal, 2007.
[3] Hutchinson, J., Kaiser, M. J., Lankarani, H., ‘The Head InjuryCriteria Functional’, Journal of Applied Mathematics andComputation, 96, 1-16, 1998.
[4] Pandy, M. G., ‘Computer Modeling and Simulation of HumanMovement’, Annu. Rev. Biomed. Eng., 3, 245-73, 2001.
[5] Lankarani, H., Aircraft Crashworthiness and OccupantProtection, Aircraft Crashworthiness and Occupant Protection,Chapter in the book, Impact and Friction of Solids, Structuresand Machines, Guran, A., ed., Chapter 16, Birkhauser, Boston,2001.
[6] Winter, D.A., Biomechanics and Motor Control of HumanMovement, 3rd Ed., John Wiley & Sons, Inc, New York, 2005.
[7] Silva, M. P. T., Ambrosio, J. A. C., ‘Kinemat ic DataConsistency in the Inverse Dynamic Analysis of BiomechanicalSystems’, Multibody System Dynamics, 8, 219-239, 2002.
[8] Piazza, S. J., Delp, S. L., ‘Three-dimensional dynamicsimulation of total knee replacement motion during a step-uptask’, Journal of Biomechanical Engineering, 123, 599-606,2001.
[9] Raasch, C., Zajac, F., Ma, B., Levine, S., ‘Muscle Coordinationof Maximum-Speed Pedaling’, Journal of Biomechanics, 30,595-602, 1997.
[10] Zappa, B., Casolo, F., Legnani, G., ‘Analysis and Synthesis of3D Motion for Multi-Body Systems with Regards to SportPerformances’, Ninth World Congress on the Theory ofMachines and Mechanisms, Milan, Italy, 1995.
Figure 9: Articular moments for (a) Ankle, (b) Knee and (c) HipJoints during a gait cycle

Dynamic Modeling and Analysis of Human Locomotion using Multibody System Methodologies 207
[11] Rasmussen, J., Damsgraard, M., Christensen, S., Surma, E.,‘Design Optimization with Respect to Ergonomic Properties’,Structural and Mu1tidisciplinan Optimization, 24, 89-97,2002.
[12] Andriacchi, I., Hurwitz, D., ‘Gait Biomechanics and theEvolution of Total Joint Replacement’, Gait and Posture, 5,256-264, 1997.
[13] Ambrosio, J., Dias, J., ‘A Road Vehicle Multibody Model forCrash Simulation based on the Plastic Hinges Approach toStructural Deformations’, International Journal ofCrashworthiness, 12, 77-92, 2007.
[14] Winter, D. A., The Biomechanics and Motor Control of HumanGait: Normal, Elderly and Pathological, University ofWaterloo Press, Waterloo, Canada, 1991.
[15] Nikravesh, P. E., Computer-aided analysis of mechanicalsystems, Prentice Hall, Englewood Cliffs, New Jersey, 1988.
[16] Baumgarte, J., ‘Stabilization of constraints and integrals ofmotion in dynamical systems’, Computer Methods in AppliedMechanics and Engineering, 1, 1-16, 1972.
[17] Gear, C. W., ‘Numerical solution of differential-algebraicequations’, IEEE Transactions on Circuit Theory, CT-18, 89-95, 1982.
[18] Chapra, S. C., Canale, R. P., Numerical Methods for Engineers,2nd Ed., McGraw-Hill, 1989.
[19] Silva, M., Ambrosio, J., ‘Sensitivity of the results producedby the inverse dynamics analysis of a human stride to perturbedinput data’, Gait and Posture, 19, 35-49, 2004.