Dynamic equivalents of distribution systems for voltage stability studies
5
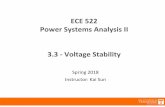
.,“ . .. . .r - . -...i . .,., Dynamic equivalents of distribution systems for voltage stability studies PJu and X.Y.Zhou Abstract: Dynamic equivalents of distribution systems, including the dynamics of electric loads and online tape changers, are needed in voltage stability studies. A method for a dynamic equivalent of a radical distribution system for voltage stability studies and an equivalent model are proposed. The procedure and detailed formulas for separate aggregation of dynamic loads and network with OLTCs are derived. Case studies show the accuracy of the equivalent model and the availability of the method. 1 Introduction Nowadays, voltage stability has drawn more and more attention. Loads play a very important role in voltage sta- bility analysis [ 1-31, such that voltage stability is sometimes thought of as load stability. Unlike transient stability simu- lation using a large-scale bulk network, voltage stability analysis requires more details of the subtransmission net- work and even the distribution system [l]. Unfortunately, the distribution system is quite often included in the load on the low-voltage side of step-down transformers con- nected to the subtransmission system. The influence of the distribution system on the voltage stability might not be taken fully into account. However, taking whole original distribution systems into consideration will lead to compu- tation problems, including simulation time and computer capacity. It is therefore important to include the influence of distribution system but not the whole distribution system in voltage stability, which is the aim of this paper. The dynamics of a distribution system is generally by three mechanisms: (i) Induction motor inertia dynamics, usually within a few seconds; (ii) Onload tap changing (OLTC) or voltage regulators; (iii) Thermostatic or manual control of constant energy loads. Efforts have been made to derive more reliable load models [47, some of which even include the effect of OLTCs, see for example [4]. As the model is continuous and the OLTCs operate discontinuously, the effect of OLTCs might not be represented adequately in the combined load model. Hence, it is better that the loads and OLTCs are represented in different equivalent components. In [SI, some valuable ideas have been worked out for reducing the distribution system. First, the equivalent load power and equivalent line impedance are obtained from 0 IEE, 2001 IEE Proceedings online no. 20010021 DO1 10.1049/ipgtd:20010021 Paper fmt received 19th October 1999 and in revised form 15th August 2000 The authors are with Hohai Univenity, 1 Xikang Rd., Nanjing 210098, Peo- ple’s Republic of China low-voltage level to high-voltage level. Secondly, a typical OLTC is used in the reduced system. Finally, a general dynamic load model is applied with typical parameters. In this way, a whole distribution system up to 130kV is reduced to an impedance, an OLTC and a dynamic load. A new equivalent model of radical distribution system for voltage stability studies is proposed. The impedance and tap position of equivalent OLTC are related and obtained simultaneously through static equivalent method. And the parameters of dynamic load models are achieved by dynamic equivalent. The equivalent models are com- pared with detailed modelling not only in dynamic responses but also in voltage stability limits. I -1 pl+Jql I /-DI I l a ! I I 42 I zt3 I b ‘ I I I I K:l I zt n I I C Fig. 1 a Distribution system h Dynamic equivalents model 1 c Dynamic equivalents model 2 Structures of distribution system arm! its dyrmvric equiva/ents 2 Equivalent models The typical structure of a radical distribution system is shown in Fig. la. A new equivalent model is proposed as shown in Fig. Ib. The new equivalent model reduces the 49 IEE ProcGenrr. Trunsm. Distrih., Vol. 148, No. I, Junuury 2001
Transcript of Dynamic equivalents of distribution systems for voltage stability studies

.,“ . .. . .r - . -...i . .,.,
Dynamic equivalents of distribution systems for voltage stability studies
PJu and X.Y.Zhou
Abstract: Dynamic equivalents of distribution systems, including the dynamics of electric loads and online tape changers, are needed in voltage stability studies. A method for a dynamic equivalent of a radical distribution system for voltage stability studies and an equivalent model are proposed. The procedure and detailed formulas for separate aggregation of dynamic loads and network with OLTCs are derived. Case studies show the accuracy of the equivalent model and the availability of the method.
1 Introduction
Nowadays, voltage stability has drawn more and more attention. Loads play a very important role in voltage sta- bility analysis [ 1-31, such that voltage stability is sometimes thought of as load stability. Unlike transient stability simu- lation using a large-scale bulk network, voltage stability analysis requires more details of the subtransmission net- work and even the distribution system [l]. Unfortunately, the distribution system is quite often included in the load on the low-voltage side of step-down transformers con- nected to the subtransmission system. The influence of the distribution system on the voltage stability might not be taken fully into account. However, taking whole original distribution systems into consideration will lead to compu- tation problems, including simulation time and computer capacity. It is therefore important to include the influence of distribution system but not the whole distribution system in voltage stability, which is the aim of this paper.
The dynamics of a distribution system is generally by three mechanisms: (i) Induction motor inertia dynamics, usually within a few seconds; (ii) Onload tap changing (OLTC) or voltage regulators; (iii) Thermostatic or manual control of constant energy loads. Efforts have been made to derive more reliable load models [47, some of which even include the effect of OLTCs, see for example [4]. As the model is continuous and the OLTCs operate discontinuously, the effect of OLTCs might not be represented adequately in the combined load model. Hence, it is better that the loads and OLTCs are represented in different equivalent components.
In [SI, some valuable ideas have been worked out for reducing the distribution system. First, the equivalent load power and equivalent line impedance are obtained from
0 IEE, 2001 IEE Proceedings online no. 20010021 DO1 10.1049/ipgtd:20010021 Paper fmt received 19th October 1999 and in revised form 15th August 2000 The authors are with Hohai Univenity, 1 Xikang Rd., Nanjing 210098, Peo- ple’s Republic of China
low-voltage level to high-voltage level. Secondly, a typical OLTC is used in the reduced system. Finally, a general dynamic load model is applied with typical parameters. In this way, a whole distribution system up to 130kV is reduced to an impedance, an OLTC and a dynamic load.
A new equivalent model of radical distribution system for voltage stability studies is proposed. The impedance and tap position of equivalent OLTC are related and obtained simultaneously through static equivalent method. And the parameters of dynamic load models are achieved by dynamic equivalent. The equivalent models are com- pared with detailed modelling not only in dynamic responses but also in voltage stability limits.
I
-1 pl+Jql I
/-DI I
l a !
I I
4 2 I zt3
I b ‘ I I
I I K:l
I zt n
I I
C Fig. 1 a Distribution system h Dynamic equivalents model 1 c Dynamic equivalents model 2
Structures of distribution system arm! its dyrmvric equiva/ents
2 Equivalent models
The typical structure of a radical distribution system is shown in Fig. la. A new equivalent model is proposed as shown in Fig. Ib. The new equivalent model reduces the
49 IEE ProcGenrr . Trunsm. Distrih., Vol. 148, No. I , Junuury 2001

distribution system in each voltage level to an equivalent section, which is named as equivalent in section (ES). The equivalent model shown in Fig. IC is the same as in [8]. This model reduces the whole distribution system to a sin- gle equivalent model, thus named as equivalent in total (ET). There are mainly two kinds of dynamic load models: (U) Composite induction motor models: In the past, consider- able attention has been paid to the analytical models of induction motor and their parameter estimation [9-1 I]. This kind of model may be needed in some short-term volt- age stability studies. Detailed models are referred to in the references. (6) Dynamic input output (YO) models, including linear U0 models, nonlinear U0 models and artificial-neural-net- work (ANN) models. There have been several dynamic load models available for voltage stability studies [4-71. The model derived by Karlsson and Hill [4] and further devel- oped by Ju et d. [7] has been widely used:
TPT (Z) + P, = A(V)
A ( V ) = P0(&TS - P o ( ; T
where P, Q represent the active and reactive powers; Tpr, Tqr represent the time constants; a,, p, represent the static exponents and a,, Pt the transient exponents.
As in [8], a constant time characteristic type of OLTC control system is used, and the delay time of step changers is constant too.
3 Equivalent parameters
3.7 Reduction procedure In angle stability studies, the generator busbars with angle coherency can be aggregated. In voltage stability studies, however, more attention is paid to load than to generator, and more to voltage magnitude than to angle. The load busbars are defined as ‘voltage coherent’, if their voltage magnitude difference is constant w i t h a certain tolerance over a certain interval, they could be reduced into an equiv- alent busbar.
To develop the equivalent model in section as shown in Fig. Ib, a 0.4kV system is first reduced to a section equiva- lent, in which an OLTC, including an impedance, is cas- caded with a dynamic load. Then the lOkV system is reduced to a section equivalent with different parameters. In this way, from 0.4kV right up to 130kV, each voltage level section is reduced to a section equivalent, where the static and dynamic reduction are performed separately. In each voltage level, reducing a distribution system should adhere to the following points: (i) The voltage of equivalent busbar is equal to the weighted mean of the original ones. (ii) The voltage of kept (unreduced) busbar should be the same or close to those before reduction.
(iii) The total load flowing into the equivalent busbar should be equal to that into the original system. (iv) The network loss of the original system should be reflected through the equivalent OLTC.
3.2 Equivalent OLTC parameters According to point (i), the voltage magnitude of the alent busbar is
n r n
equiv-
k=l where V, represents the voltage magnitude of the equiva- lent busbar; v k represents the voltage magnitude of busbar k; SL = d(P2 + QZ) and Px, Q k are the active power and reactive power; rz is the total number of busbars to be aggsegated.
The load-flow calculation results are used to find the equivalent impedance and tape ration of OLTC. Based on point (iii) and (iv), according lo Fig. 16, the power and voltage equations can be obtained:
4% + ~ Q l t = ( K , . I t )2 . (R, + j X , ) Pt+iRt + Qt+iXt).+ (Pt+iXt + Yt+i&)Z
K+1 vz+ 1 +
($7 (3)
where PI+, and Q,+, are the active and reactive power flow- ing into the equivalent busbar MI+, in low-voltage level; I, is the current of the equivalent busbar MI in a high-voltage level; PI,, Qll, V,, SI, I,, P,+, and e,+, can be obtained by load-flow calculation of the original system. With the equa- tions, the tape ration K , and the impedance RI + j X , of the equivalent OLTC can be solved simultaneously.
It should be noted that the time constant of equivalent OLTC is equal to the weighted sum of the OLTCs to be aggregated.
3.3 Equivalent-load parameters If the loads are represented by composite induction motor models, the equivalent-induction-motor parameters can be reached by the method as given in [9].
If the loads are represented by the models as given in eqn. I , taking the active power as an example only, the equivalent-load parameters can be derived as given in Appendix 7.1 :
n n
I j=l J=1 n I n
(4) where POMI represent the active power of equivalent busbar i under normal operation; a,M,, aflMI, TprM, are the equiva- lent load parameters. It is observed that:
1EE Proc -Gene? Trnnim Dufrrh Vol 148 N o I Junuury 20OI 50

(a) The equivalent transient and static exponents are the weighted sum of individual exponents. The weight is the ration of load power in total power, i.e.
n
0.988
0.987
0.986
a 3 0.985
(5)
- -
-
-
3=1
(b) The equivalent time constant is the weighted sum of individual time constants. However, the weight is related to the exponents, i.e.
n
P 3 = Po,(@, - %)/ Po,(% - Q S , ) (6) 7 = 1
4.2 Steady-state voltage stability The equivalent models are added to a program of steady- state voltage stability. The steady-state load limits with dif- ferent models are given in Table I . The results tell us that: (i) Two equivalent models are acceptable; (ii) The equivalent in section is more accurate than the equivalent in total, which is easy to understand; (iii) The load limit error of node 5 is less than that of node 6. The reason may be that the distribution system is far away from node 5 and, thus, affects the load limit of node 5 to a lesser extent.
Table 1: Comparison on the steady-state load limits
4 Case studies
4.7 Example system It is the authors' viewpoint that the final way for validating the equivalent model is to compare the voltage stability load limits obtained from a detailed distribution system and a reduced system separately. The main system is an IEEE 9-node system as shown in Fig. 2, which has param- eters and load flow as given in [12]. A radial distribution system with the structure as shown in Fig. la is connected to node 9, with the following parameters.
0
0 Fig.2
Line impedance:
Scheme diugrum qfthe main system
ZL1 = 0.02 + jo.1, ZL2 = 0.01 + jo .02, Zt3 = 0.02 +j0.02
Transformer impedance:
Z T ~ = 0.01 + j 0 . 0 5 , Z ~ a = 0.01 + j0.08, ZT3 = 0.01 + j0.12
The common OLTC data: upper function level = 1.0150p.u., lower function level = 0.9850p.u., upper recov- ery level = 1.0135p.u., lower recovery level = 0.9865p.u., number of tap levels available = +/- 9 steps, step size = 0.0167p.u. and time delay = 10s. Load parameters: Po, = 0.75p.u., Qol = O.~P.U. , Tp,l = 194~, T,,, = 84.51~, a,l = 1.37, psi = 3.24, a,l = 1.92, ptl = 4.80 Po2 = O.~P.U. , Qo2 = O.~P.U., Tp72 = 144~, Tqr2 = 100.5~, = 1.10, psz IEE Proc.-Gener. Tranuni. Distrih., Vol. 148, No. I , Janunrv 2001
2.24, ~ l , = 2.32, fit, = 5.10
Equivalent in section Equivalent in total Increasing Detailed load at model
Node5 0.8918p.u. 0.9012p.u. 1.05% 0.9050p.u. 1.48%
Node 6 1.6323p.u. 1.6873p.u. 3.36% 1.6985p.u. 4.06%
r
I I I I I I 0.98fl) 20 40 60 80 100 120
1, s Fig. 3 U Detailed model h Equivalent in section c Equivalent in total
voltage curves of Mode 9 when clurrrgirg Z5-9
Table 2: Comparison on the load limits under large distur- bance
Node Equivalent in section Equivalent in total number model
Node6 1.3187p.u. 1.3710p.u. 4.01% 1.3842p.u. 4.97%
l r
,- a 1°'g51 0.9
- .. - .. - .. - 1 .. -J - .. - . 0.8
0 20 40 60 80 100 120 t, s
Fig. 4 a Detailed model b Equivalent in section c Equivalent in total
Voltuge aives of node 9 when chging Z9.,*
4.3 Transient voltage stability A large disturbance is performed by suddenly changing the line impedance. When suddenly increasing the impedance between node 9 and 5 to 0.07 + j0.35 at t = 5s, the voltage curves of node 9 with different models are shown in Fig. 3, and the transient load limits of node 5 are given in Table 2.
51

Suddenly increasing the impedance between node 9 and 10 to 0.02 + j0.285 at t = 5s leads to the voltage in Fig. 4, where node 10 is the first node of the distribution system connected to node 9. It is clear from these Tables and Figures that: (i) Two equivalent models can capture the dynamic essence of a distribution system; (ii) The equivalent in section is more accurate than the equivalent in total; (iii) When faulted line is closer to the feeder node of the dis- tribution network, the accuracy of equivalent models, espe- cially the equivalent in total, will become worse.
5 Conclusions
,
A new dynamic equivalent model of radial distribution sys- tem has been proposed, and the detailed formulas for the equivalent parameters have been derived. Both steady state and transient voltage stability studies show that the equiva- lent model captures the essence of system dynamics. It is proven that the equivalent in section is more accurate than the equivalent in total.
6 References
1 2
TAYLOR, C.: ‘Power system voltage stability’ (McCraw-Hill, 1994) BORGHETTI, A., and CALDON, R.: ‘On dynamic load models for voltage stability studies’, IEEE Tram.., 1997, PWRS12, (I), pp. 293- 303 PAL, M.K.: ‘Voltage stability conditions considering load characteris- tics’, IEEE Trans., 1992, PWRS-7, (I), pp. 243-303 KARLSSON, D., and HILL, D.J.: ‘Modelling and identification of nonlinear dynamic loads in power systems’, IEEE Trans., 1994,
HILL, D.J.: ‘Nonlinear dynamic load models with recovery for volt- age stability studies’, IEEE Truns., 1993, PWRS-8, (I), pp. 16C176 XU, W., and MANSOUR, Y.: ‘Voltage stability analysis using gen- eral dynamic load models’, fEEE Trans., 1994, PWRS-9, (2), pp. 47% 493
7 JU, P., HANDSCHIN, E., and KARLSSON, D.: ‘Nonlinear dynamic load modelling - model and parameter estimation’, IEEE Trans., 1996, PWRSll, (4), pp. 1686-1697
8 LIND, R., and KARLSSON, D.: ‘Distribution system modelling for voltage stability studies’. Proceedings of IEEEKTH Power Tech. con- ference, Stockholm, Sweden, June 1995, pp. 215-220 FARHAD, N.: ‘Aggregation of induction motors for transient stabil- ity load modelling’. Proceedings of IEEEmES 1987 Winter Meeting, 1987,
10 GILL, G.R., and OWEN, T.T.: ‘Induction motor load aggregation for transient stability studies by constrained parameter estimation’. Proceedings of IEEEPES 1979 Summer Meeting, 1979,
11 ILICETO, F., and CAPASSO, A.: ‘Dynamic equivalents of asynchro- nous motor loads in system stability studies’, fEEE Truns., 1974, PAS 93, (4), pp. 165&1659
12 ANDERSON, P.M., and FOUAD, A.A.: ‘Power system control and stability’ (Iowa University Press, 1979)
7
7.7 Transient and static characteristics A distribution node with two loads is taken as an example, the normal operation powers are assumed to be Pol, Po2. Expressing the power around the normal voltage Vo and neglecting the high-order term lead to the following equa- tions:
3
4
PWRS-9, (I), pp. 157-166 5
6
9
Appendix 1: Derivation of load parameters
(9) AV
V O P M P o ( l + a , . -)
With P = PI + P2: AV AV VO VO
Po(l+ as . -) = POl(1.t as1 . -)
AV VO
+Po2(1 + a s 2 ’ --I (10)
This results in the following:
Similar procedure gives Po =Po1+Poz,a, = (Pol~asz+Po2~(Y,2)/Po (11)
at = (Po1 . at1 + Po2 . %,)/Po (12)
7.2 Time constants A step-voltage change from Vo to V at t = Os is supposed, then the power responses are a5 follows:
P( t ) = PQ (g) $- (. (g) (13)
-Po (1 - e-*)
where
From eqns. 13-16, the following is obtained approximately: P(t) = Pl ( t ) + p2 ( t ) (16)
Denote
then
If an error index is defined as follows: P m
52

Obviously, J(T,,.) = 0 when Tpr = (AT,,, + B.Tp,.Z)/(A + B), that is:
(22) This leads to the fact that Tpr depends on the voltage, which is unavailable. Making a. Taylor expression around V = V, and neglecting the high-order terms, finally the fol- lowing may be obtained:
TpT Z Z
POI ' ( a s 1 - atl) ' T p T 1 + P02(~s2 - Q t z ) . T p T z POI (as1 - Q t l ) + P02(Qs2 - " t 2 )
( 23 )
IEE Proc.-Gener. Transm. Distrib., Vol. 148, No. I , January 2001
For the case with n loads, the following results can be achieved:
n
POMz = EPOj J=1 n I n
53