
오린아오린아오린아 - MKfile.mk.co.kr/imss/write/20190318140459__00.pdf온라인온라인 채널채채널널채널 고속 성장, 럭셔리럭셔리 브랜늞브랜늞 의
韓國電磁波學會論文誌 第 22 卷 第 12 號 2011年 12月 論文 2011-22-12-01
http://dx.doi.org/10.5515/KJKIEES.2011.22.12.1045
1045
국방과학연구소(Agency for Defense Development)
*삼성탈 스(Samsung Thales)
․논 문 번 호 : 20110704-064
․교 신 자 : 노지은(e-mail : [email protected])
․수정완료일자 : 2011년 11월 2일
3차원 다기능 이더 고속 실시간 신호 처리기 개발
Development of 3-D Multi-Function Radar High-Speed
Real-Time Signal Processor
노지 ․최병 ․이희 ․양진모․이 철*․이동 *․ 래 *․ 태환*․이민
Ji-Eun Roh․Byung-Gwan Choi․Hee-Young Lee․Jin-Mo Yang․Kwang-Chul Lee*․
Dong-Hwi Lee*․Rae-Hyung Jung*․Tae-Hwan Kim*․Min-Joon Lee
요 약
3차원 다기능 이더는 다수의 표 을 실시간으로 탐지, 추 하여 표 의 거리, 속도, 각도 정보를 추출하고
유도탄과의 교신을 통해 표 치정보를 제공하는 최신 이더이다. 본 논문에서는 다기능 이더의 핵심 구
성품이라할 수 있는 고속다 DSP가 용된 실시간신호처리기의 설계, 제작 성능시험결과에 해 소개
하 다. 기존의 CFAR 탐지성능에 비해열악한 클러터 환경에서표 의 탐지성능이 개선된 CFAR 알고리즘과
변별기 추정 방식을 이용한 정 표 치 측정 방법 최소값 추정 방식을 이용한 잡음 재 단 알고리즘
등의 구 결과들을 소개하 고, 성능 입증 시험을 통한 시험 결과들을 제시하 다.
Abstract
A 3-D multi-function radar(MFR) is a modern radar to provide various target information, such as range, doppler,
and angle by performing surveillance, multiple target tracking, and missile guidance. In this paper, we introduced a
real-time radar signal processor(RSP), which is a crucial component of MFR with its design, implementation using
high-speed multiple DSP, and performance. Additionally, we verified that several advanced signal processing algorithms
were well-performed in our RSP, such as MCA-CFAR algorithm for target detection in clutter environment, range and
velocity measurement algorithm using discriminator estimation, and noise jammer detection algorithm using local
minimum selection.
Key words : Multi-Function Radar, Radar Signal Processor, High-Speed DSP, MCA-CFAR, Discriminator Estima-
tion, Noise Jammer Detection
Ⅰ. 서 론
3차원 다기능 이더(MFR: Multi-Function Radar)
는 실시간으로 다수의 표 을 탐지, 추 하여 거리
각도 정보를 제공하는 최신 이더 시스템이다.
표 의 탐지부터 추 까지 실시간 신호 처리를 해
빔 조향이 용이한 상 배열 안테나 기술 효율
인 빔 스 링 기술과 같은 첨단 이더 기술과 함
께 복잡하고 다양한 신호 처리 과정을 효과 으로
구 하고, 높은 정 도를 갖는 표 정보를 실시간
으로 제공할 수 있는 이더 신호 처리기가 요구된
다. 한, 속도로 발 하고 있는 자 (ECM) 환
경에서도 이더의 요구 성능을 발휘할 수 있는 신
호 처리 기술의 개발도 함께 요구된다.
韓國電磁波學會論文誌 第 22 卷 第 12 號 2011年 12月
1046
이러한 다양한 요구 조건을 만족하기 해서는
과거에 용되었던 이더 신호 처리의 개념, 를
들어 아날로그 형태의 펄스 확장 압축 기법이나
고정 임계치를 이용한 CFAR 탐지 기술들로는 다기
능 이더에서 요구하는 성능을 만족할 수 없다.
본 논문에서는 다수의 표 을 탐지 추 하고
자 능력을 보유한 다기능 이더용 실시간 이
더 신호 처리기의 설계 제작, 시험 결과에 해
기술하 다. 개발된 고속 병렬 실시간 이더 신호
처리기는 100 MHz 클럭의 디지털 신호 처리용 DSP
(Analog Device사의 ADSP-21160)가 탑재된 신호 처
리기로 다 처리가 가능하고 이더에서 사용되는
형별 신호 처리 알고리즘이 최 화되도록 설계,
제작되었다. 제안된 이더 신호 처리기에는 이더
운용 환경의 변화에 응하여 오경보율을 일정하게
유지하면서 표 을 탐지할 수 있는 응형 MCA
(Modified Cell-Averaging)-CFAR 알고리즘, 변별기 추
정 방식을 이용한 표 거리/속도 측정 알고리즘
최소값 선택 방식을 이용한 잡음 재 추정 알고리
즘 등이 구 되었다.
본 논문의 Ⅱ장에서는 다기능 이더 시스템에서
요구하는 이더 신호 처리기의 요구 기능 성능
에 해 설명하고, Ⅲ장에서는 DSP를 이용한 이더
신호 처리기 하드웨어 구성 설계, 제작된 내용과
개발된 신호 처리 알고리즘과 함께 성능 시험을 통
한 검증 결과에 해 기술하 으며, Ⅳ장에서 결론
을 맺는다.
Ⅱ. 다 능 이 시스템
다기능 이더는 상 배열 안테나, 고출력 송신
기, 신호 처리기 통제기 등으로 구성되며, 각각의
유니트들은 RS-485 통신 채 (Cmd/Data)을 통해 통
제기에 의해 제어된다. 안테나 유니트는 다수의 복
사소자로 이루어진 상 배열 안테나, 송수신용 공
간 기 다채 수신기로 구성되어 있으며, 고
출력 송신기는 형 발생기와 주 수 합성기로부터
낮은 수 의 RF 신호를 받아 고출력으로 변환하여
안테나에 공 한다. 다기능 이더의 핵심 구성품
의 하나인 신호 처리기(RSP)는 상 배열 안테나
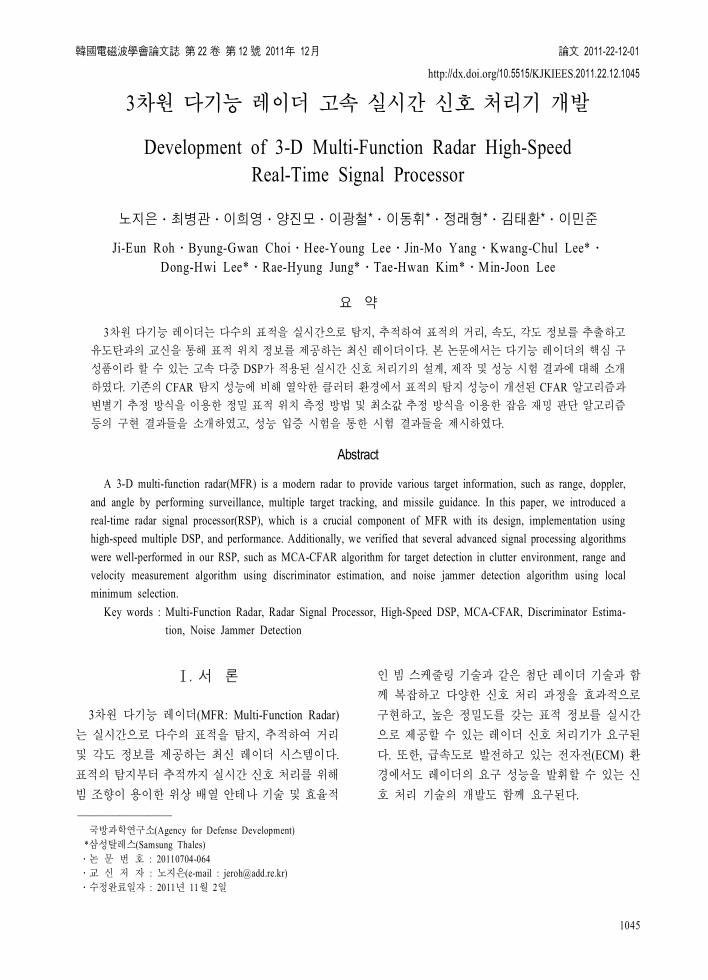
그림 1. 다기능 이더 시스템 구성도
Fig. 1. Multi-function radar system configuration.
를 통해 수신된 반사 신호를 수신기로부터 입력받아
클러터, 재 과 같은 불필요한 신호들로부터 표
신호를 실시간으로 추출하고 표 의 거리, 속도
각도 정보 등을 통제기로 제공하는 역할을 한다. 이
와 같이 구성된 다기능 이더의 개략 인 구성은
그림 1과 같다.
다기능 이더 시스템은 표 탐지 추 을
해 다양한 형을 이용하며 제한된 빔 자원(beam re-
source)을 효율 으로 활용할 수 있도록 빔 스 쥴러
를 이용하여 임무를 수행한다. 다기능 이더를 구
성하는 여러 구성품 신호 처리기는 통제기로부터
빔 스 링에 따른 제어 명령 동기 신호를 받아
실시간으로 표 에 한 정보를 제공할 수 있도록
설계되어야 한다. 한, 시스템의 운용 조건인 빔 운
용고도, 지형 조건 등에 따라 다양한 형태의 형을
처리할 수 있어야 하며, 탐지된 표 의 정 추 을
한 측정값들(거리, 속도 각도 정보)의 오차를
추정하여야 한다. 이외에도 의 개념이 자
양상을 띠게 됨으로써 재 신호를 효율 으로 억제
할 수 있는 기능 등을 보유하도록 설계되어야 한다.
다기능 이더 시스템에서 정의한 신호 처리기의 주
요 임무를 수행하기 해 요구되는 주요 요구사항은
다음과 같다.
∙ 표 탐지 : 최 필터링 기법, 도 러-필터링,
MCA-CFAR[1,2] 탐지기 용
∙ 표 추 : 모노펄스 처리 거리, 속도 측정
을 한 변별기 추정 알고리즘[3] 용
∙ 실시간 신호 처리 : 고속-다 병렬 처리 DSP
아키텍처 용[4]
3차원 다기능 이더 고속 실시간 신호 처리기 개발
1047
Ⅲ. 고속 병 실시간 신 처리
3-1 구성
다기능 이더는 표 반사 신호의 실시간 신호
처리를 목 으로 개발된 장비이며, 주 수 역에서
최 필터링을 통한 표 탐지, 도 러 처리를 통한
표 탐지 추 , 방 각/고각 에러값 측정, 이
더 통제기에 실시간 신호 처리 결과를 제공하는 기
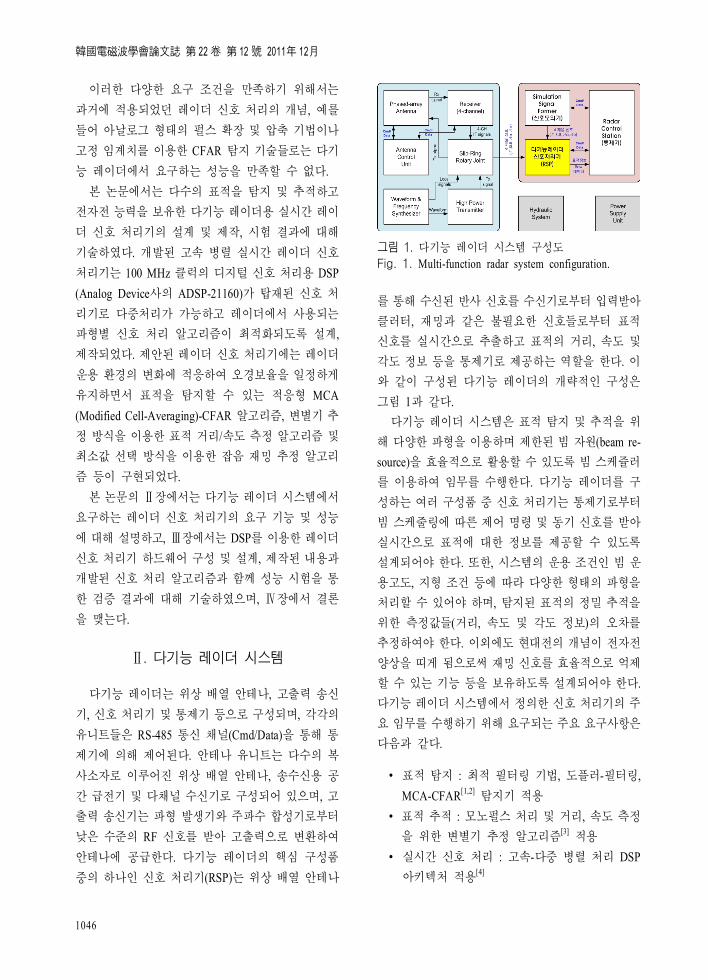
능을 수행한다. 그림 2는 신호 처리기의 구성도를
나타내며, 수신기로부터 입력된 간 주 수 신호를
증폭-필터링 A/D(Analog-to-Digital) 변환하여 DDC
(Digital Down Converter) 기능을 수행하는 아날로그
부와 통제기의 제어에 따라 실시간 신호 처리 연산
을 수행하는 디지털부로 되어 있다. 디지털부는 통
제기로부터 제어 명령을 수신하고 신호 처리기의 상
태 정보를 송신하는 호스트 모듈, 고속-다 DSP들
이 병렬로 구성되어 여러 가지 신호에 한 신호 처
리 연산을 수행하는 로세싱 모듈, 시스템 동기를
유지하기 한 동기 시험 모듈과 임의의 거리에
고정된 표 정보를 모사하는 신호 모사 모듈, 통제
기로 신호 처리 결과를 동기에 맞추어 송하는 출
력제어 모듈, 신호 처리기의 상태 검 정보를
시하는 지시 모듈 등으로 구성되어 있다.
다기능 이더 신호 처리기는 입력 신호의 실시
간 신호 처리를 해 고속-다 병렬 처리 구조를 갖
도록 구성되었으며, 각각의 DSP에 탑재되는 신호 처
리 소 트웨어는 시스템의 운용 형에 따라 최 의
성능을 갖도록 설계되었다. 다기능 이더는 표
탐지 목 으로 선형 주 수 변조 신호(LFM)와 펄스
그림 2. 신호 처리기 구성도
Fig. 2. RSP structure diagram.
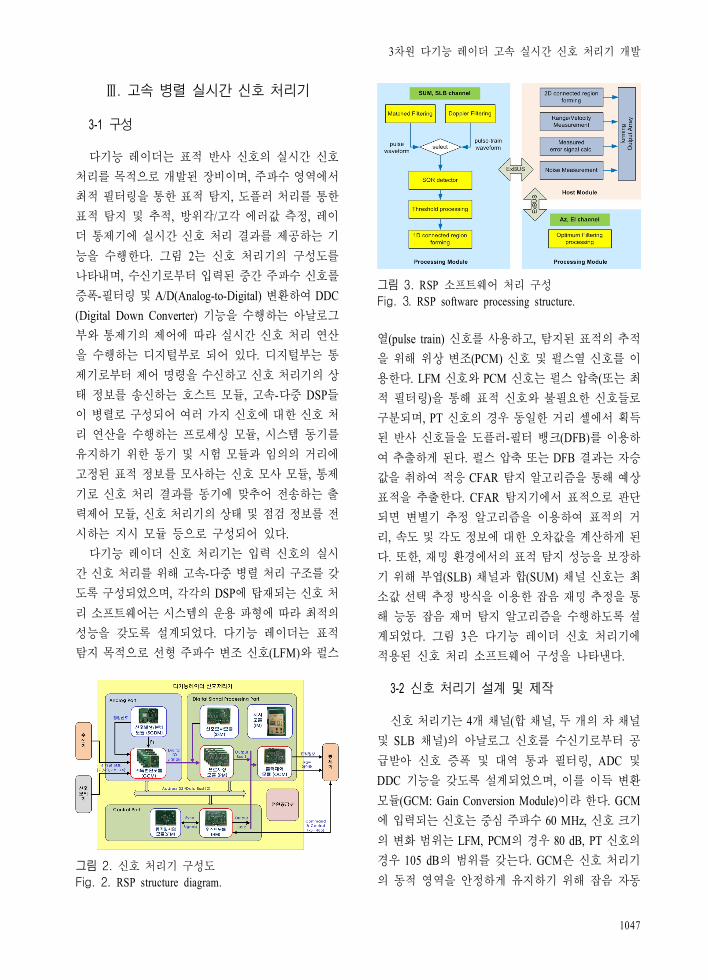
그림 3. RSP 소 트웨어 처리 구성
Fig. 3. RSP software processing structure.
열(pulse train) 신호를 사용하고, 탐지된 표 의 추
을 해 상 변조(PCM) 신호 펄스열 신호를 이
용한다. LFM 신호와 PCM 신호는 펄스 압축( 는 최
필터링)을 통해 표 신호와 불필요한 신호들로
구분되며, PT 신호의 경우 동일한 거리 셀에서 획득
된 반사 신호들을 도 러-필터 뱅크(DFB)를 이용하
여 추출하게 된다. 펄스 압축 는 DFB 결과는 자승
값을 취하여 응 CFAR 탐지 알고리즘을 통해 상
표 을 추출한다. CFAR 탐지기에서 표 으로 단
되면 변별기 추정 알고리즘을 이용하여 표 의 거
리, 속도 각도 정보에 한 오차값을 계산하게 된
다. 한, 재 환경에서의 표 탐지 성능을 보장하
기 해 부엽(SLB) 채 과 합(SUM) 채 신호는 최
소값 선택 추정 방식을 이용한 잡음 재 추정을 통
해 능동 잡음 재머 탐지 알고리즘을 수행하도록 설
계되었다. 그림 3은 다기능 이더 신호 처리기에
용된 신호 처리 소 트웨어 구성을 나타낸다.
3-2 신 처리 설계 작
신호 처리기는 4개 채 (합 채 , 두 개의 차 채
SLB 채 )의 아날로그 신호를 수신기로부터 공
받아 신호 증폭 역 통과 필터링, ADC
DDC 기능을 갖도록 설계되었으며, 이를 이득 변환
모듈(GCM: Gain Conversion Module)이라 한다. GCM
에 입력되는 신호는 심 주 수 60 MHz, 신호 크기
의 변화 범 는 LFM, PCM의 경우 80 dB, PT 신호의
경우 105 dB의 범 를 갖는다. GCM은 신호 처리기
의 동 역을 안정하게 유지하기 해 잡음 자동
韓國電磁波學會論文誌 第 22 卷 第 12 號 2011年 12月
1048
이득제어(NAGC, Noise AGC)[5],[6] 기능을 담당하는
DCA(Digitally-Controlled Atttenuator)와 신호 성분의
증폭으로 인한 ADC 포화를 방지하기 한 DCA로
구성되어 있다. DCA는 31 dB의 감쇄 조정 범 를
갖는 6-비트 PE4302-51[7]을 용하 다.
NAGC와 ADC 간의 계는 ADC 손실로 정의된
다. ADC 손실( )은 신호 처리기의 동 역을
제한하는 요소 하나로 ADC에 입력되는 잡음을
포함한 신호의 크기가 최소 양자화 수 보다 작을
때 ADC에 의한 손실[8]로 정의된다. ADC 손실을
정하게 유지하기 한방법으로 잡음 자동 이득제어
를 이용한다. NAGC는 이더 시스템의 성능을 안정
화하기 해, 즉 ADC의 손실을 일정하게 유지하기
해, 수신기로부터 유입되는 잡음의 크기를 일정하
게 유지하기 한 기법으로 ADC에 입력되는 잡음
(), ADC의 양자화 수 ( )과 간의 다
음 계식[5]을 이용하여 결정되며, 주기 인 잡음수
측정을 통해 비를 일정하게 유지하도
록 신호 처리기에서 제어된다.
log log
log
log (1)
식 (1)에서 는 ADC 양자화 잡음( )을 양자
화 수 ( )로 정규화 값으로 이상 인 ADC의
경우, 의 값을 갖는다. GCM에 용된 16-비트
80 MSPS ADC(LTC2206IUK)[9]에 해 를
4~5로 설정하 으며, 이 때 ADC 손실은 0.4 dB 이
하이다.
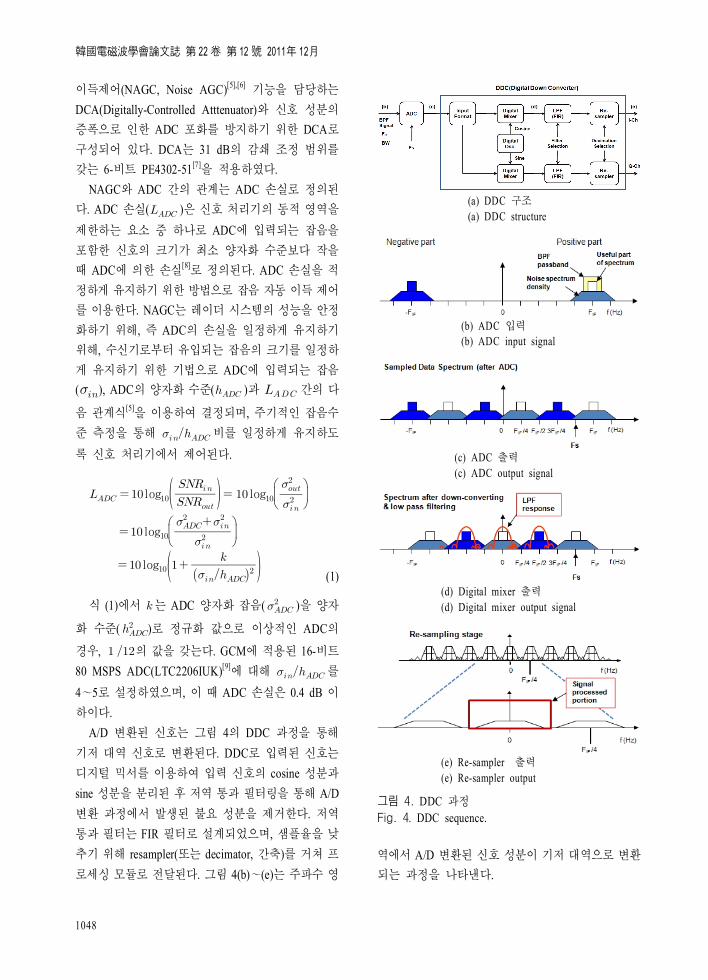
A/D 변환된 신호는 그림 4의 DDC 과정을 통해
기 역 신호로 변환된다. DDC로 입력된 신호는
디지털 믹서를 이용하여 입력 신호의 cosine 성분과
sine 성분을 분리된 후 역 통과 필터링을 통해 A/D
변환 과정에서 발생된 불요 성분을 제거한다. 역
통과 필터는 FIR 필터로 설계되었으며, 샘 율을 낮
추기 해 resampler( 는 decimator, 간축)를 거쳐
로세싱 모듈로 달된다. 그림 4(b)~(e)는 주 수
(a) DDC 구조
(a) DDC structure
(b) ADC 입력
(b) ADC input signal
(c) ADC 출력
(c) ADC output signal
(d) Digital mixer 출력
(d) Digital mixer output signal
(e) Re-sampler 출력
(e) Re-sampler output
그림 4. DDC 과정
Fig. 4. DDC sequence.
역에서 A/D 변환된 신호 성분이 기 역으로 변환
되는 과정을 나타낸다.
3차원 다기능 이더 고속 실시간 신호 처리기 개발
1049
디지털 국부 발진기의 출력 신호는 불필요한 다
른 주변의 신호들(얼라이어싱 성분)을 제거하기
해 FIR 필터로 구 된 역 통과 필터와 간축 과정
을 거치게 되며 Fs가 48 MHz인 FIR 필터 출력은 간
축을 통해 원하는 샘 링 주 수를 가지는 신호로
변환된다. LFM과 PCM의 경우 8:1 간축을, PT의 경
우에는 4:1 간축을 수행하여 각각 샘 링 주 수가
6 MHz과 12 MHz인 복소 신호를 얻는다. LFM과
PCM 신호의 경우, 두 단으로 이루어진 FIR 필터를
거치게 되며, PT 신호의 경우 한 단으로 구성된 FIR
필터를 통과하도록 설계되었다. FIR 필터는 송신 신
호의 역폭을 고려하여 설계되었다.
LFM, PCM 신호의 경우, 1단 FIR 필터는 MHz 수
의 통과 역(fc)을 갖고, 통과 역 내에서의 진폭
(a) LFM, PCM 신호에 한 1단 FIR 필터
(a) 1st FIR filter(LFM, PCM)
(b) LFM, PCM 신호에 한 2단 FIR 필터
(b) 2nd FIR filter(LFM, PCM)
(c) PT 신호에 한 FIR 필터
(c) FIR filter(PT)
그림 5. DDC내 FIR 필터 주 수 응답
Fig. 5. Frequency response of FIR filter in DDC.
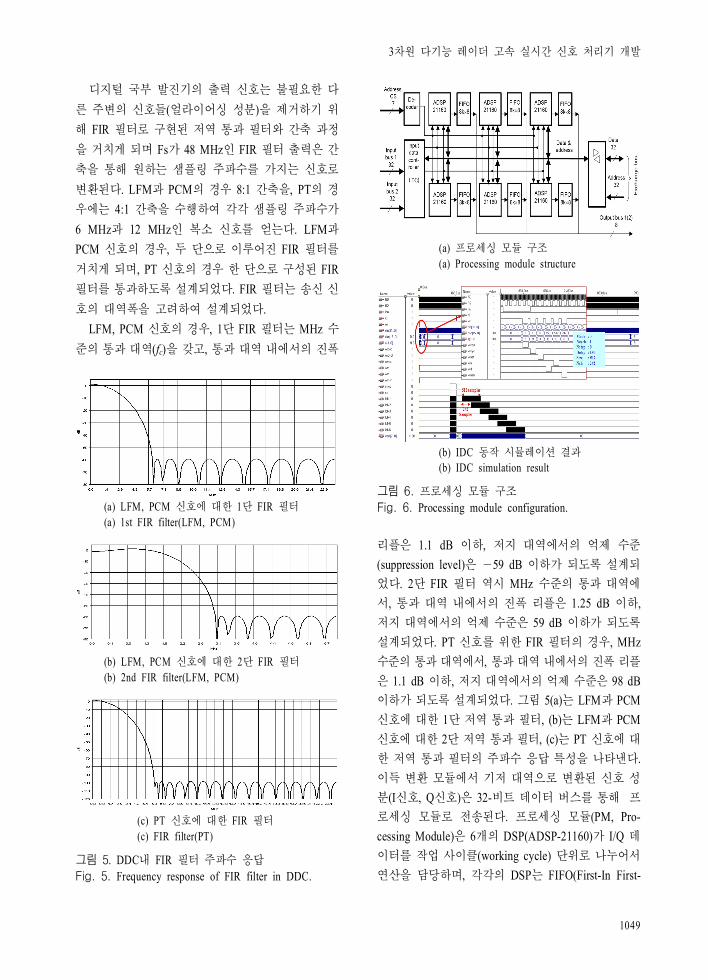
(a) 로세싱 모듈 구조
(a) Processing module structure
(b) IDC 동작 시뮬 이션 결과
(b) IDC simulation result
그림 6. 로세싱 모듈 구조
Fig. 6. Processing module configuration.
리 은 1.1 dB 이하, 지 역에서의 억제 수
(suppression level)은 —59 dB 이하가 되도록 설계되
었다. 2단 FIR 필터 역시 MHz 수 의 통과 역에
서, 통과 역 내에서의 진폭 리 은 1.25 dB 이하,
지 역에서의 억제 수 은 59 dB 이하가 되도록
설계되었다. PT 신호를 한 FIR 필터의 경우, MHz
수 의통과 역에서, 통과 역내에서의진폭리
은 1.1 dB 이하, 지 역에서의 억제 수 은 98 dB
이하가 되도록 설계되었다. 그림 5(a)는 LFM과 PCM
신호에 한 1단 역 통과 필터, (b)는 LFM과 PCM
신호에 한 2단 역 통과 필터, (c)는 PT 신호에
한 역 통과 필터의 주 수 응답 특성을 나타낸다.
이득 변환 모듈에서 기 역으로 변환된 신호 성
분(I신호, Q신호)은 32-비트 데이터 버스를 통해
로세싱 모듈로 송된다. 로세싱 모듈(PM, Pro-
cessing Module)은 6개의 DSP(ADSP-21160)가 I/Q 데
이터를 작업 사이클(working cycle) 단 로 나 어서
연산을 담당하며, 각각의 DSP는 FIFO(First-In First-
韓國電磁波學會論文誌 第 22 卷 第 12 號 2011年 12月
1050
Out)가 있어서 신호 처리 결과는 실시간으로 FIFO로
장된다. 한, 로세싱 모듈의 모든 DSP는 호스
트 모듈의 제어 로세서와 통신하여 데이터를 교환
할 수 있다. 그림 6(a)는 로세싱 모듈의 구조를 나
타낸다.
로세싱 모듈은 기본 으로 동일한 작업을 병렬
로 처리하여 정해진 시간 내에 신호 처리 결과를 제
공할 수 있도록 24개의 DSP칩으로 구성되어 있으며,
6개의 DSP칩이 장착된 체 4장의 로세싱 모듈이
다기능 이더의 신호 처리를 담당하도록 설계되었
다. GCM의 ADC-DDC 처리된 반사 신호들은 PM 내
의 IDC(Input Data Controller)에 의해 6개의 DSP로 분
배되는데, IDC는 통제기로부터 운용하는 형 정보
를 받아 각각의 DSP가 처리해야 하는 데이터 시작
과 길이를 분석한 후 각각의 DSP가 처리할 데이터
를 분배한다. 그림 6(b)는 LFM 신호에 한 IDC와
각 DSP간의 입력 데이터 분배 제어 방법에 한
타이 시뮬 이션 결과이다. PM의 DSP는 공통
으로 LFM, PCM 신호에 한 펄스 압축 처리와 PT
형에 한 도 러 처리 알고리즘이 탑재되어 형
별 신호 처리 기능을 수행하고, SQR 검 , 임계값
설정 CFAR 탐지 알고리즘도 탑재되어 표 탐지
기능을 병렬 처리하게 된다.
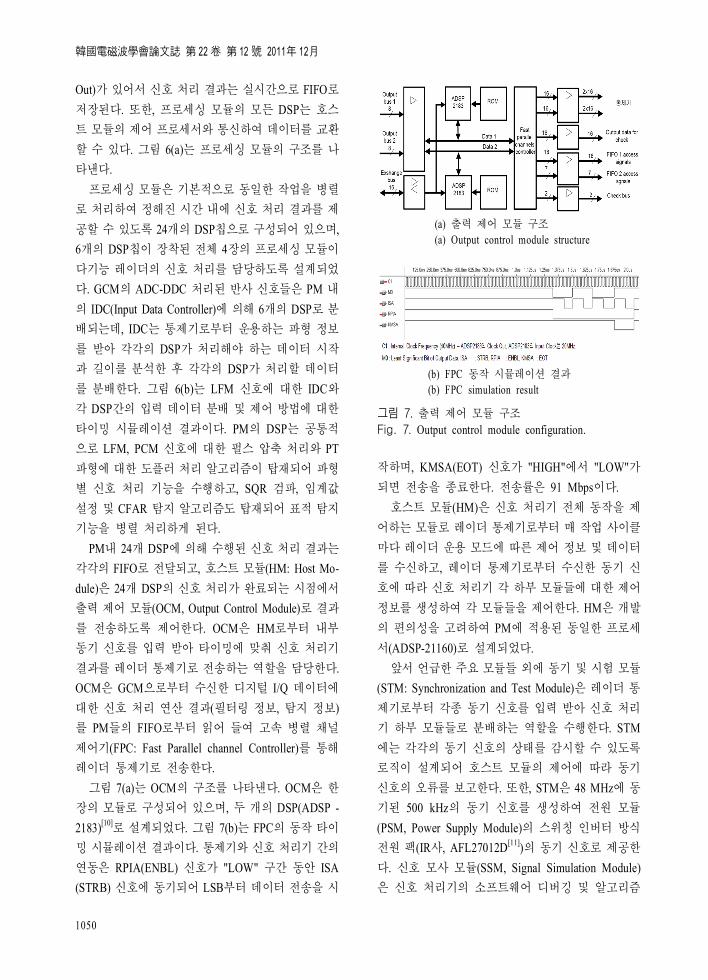
PM내 24개 DSP에 의해 수행된 신호 처리 결과는
각각의 FIFO로 달되고, 호스트 모듈(HM: Host Mo-
dule)은 24개 DSP의 신호 처리가 완료되는 시 에서
출력 제어 모듈(OCM, Output Control Module)로 결과
를 송하도록 제어한다. OCM은 HM로부터 내부
동기 신호를 입력 받아 타이 에 맞춰 신호 처리기
결과를 이더 통제기로 송하는 역할을 담당한다.
OCM은 GCM으로부터 수신한 디지털 I/Q 데이터에
한 신호 처리 연산 결과(필터링 정보, 탐지 정보)
를 PM들의 FIFO로부터 읽어 들여 고속 병렬 채
제어기(FPC: Fast Parallel channel Controller)를 통해
이더 통제기로 송한다.
그림 7(a)는 OCM의 구조를 나타낸다. OCM은 한
장의 모듈로 구성되어 있으며, 두 개의 DSP(ADSP -
2183)[10]로 설계되었다. 그림 7(b)는 FPC의 동작 타이
시뮬 이션 결과이다. 통제기와 신호 처리기 간의
연동은 RPIA(ENBL) 신호가 "LOW" 구간 동안 ISA
(STRB) 신호에 동기되어 LSB부터 데이터 송을 시
(a) 출력 제어 모듈 구조
(a) Output control module structure
(b) FPC 동작 시뮬 이션 결과
(b) FPC simulation result
그림 7. 출력 제어 모듈 구조
Fig. 7. Output control module configuration.
작하며, KMSA(EOT) 신호가 "HIGH"에서 "LOW"가
되면 송을 종료한다. 송률은 91 Mbps이다.
호스트 모듈(HM)은 신호 처리기 체 동작을 제
어하는 모듈로 이더 통제기로부터 매 작업 사이클
마다 이더 운용 모드에 따른 제어 정보 데이터
를 수신하고, 이더 통제기로부터 수신한 동기 신
호에 따라 신호 처리기 각 하부 모듈들에 한 제어
정보를 생성하여 각 모듈들을 제어한다. HM은 개발
의 편의성을 고려하여 PM에 용된 동일한 로세
서(ADSP-21160)로 설계되었다.
앞서 언 한 주요 모듈들 외에 동기 시험 모듈
(STM: Synchronization and Test Module)은 이더 통
제기로부터 각종 동기 신호를 입력 받아 신호 처리
기 하부 모듈들로 분배하는 역할을 수행한다. STM
에는 각각의 동기 신호의 상태를 감시할 수 있도록
로직이 설계되어 호스트 모듈의 제어에 따라 동기
신호의 오류를 보고한다. 한, STM은 48 MHz에 동
기된 500 kHz의 동기 신호를 생성하여 원 모듈
(PSM, Power Supply Module)의 스 칭 인버터 방식
원 팩(IR사, AFL27012D[11])의 동기 신호로 제공한
다. 신호 모사 모듈(SSM, Signal Simulation Module)
은 신호 처리기의 소 트웨어 디버깅 알고리즘
3차원 다기능 이더 고속 실시간 신호 처리기 개발
1051
검증을 해 다기능 이더의 수신 신호를 수식 으
로 모사하여 진폭 샘 값들이 장된 모듈로 통제기
의 검 모드 는 신호처리기 자체의 디버깅 시 호
스트 모듈의 제어에 따라 디지털 I/Q 신호를 PM에
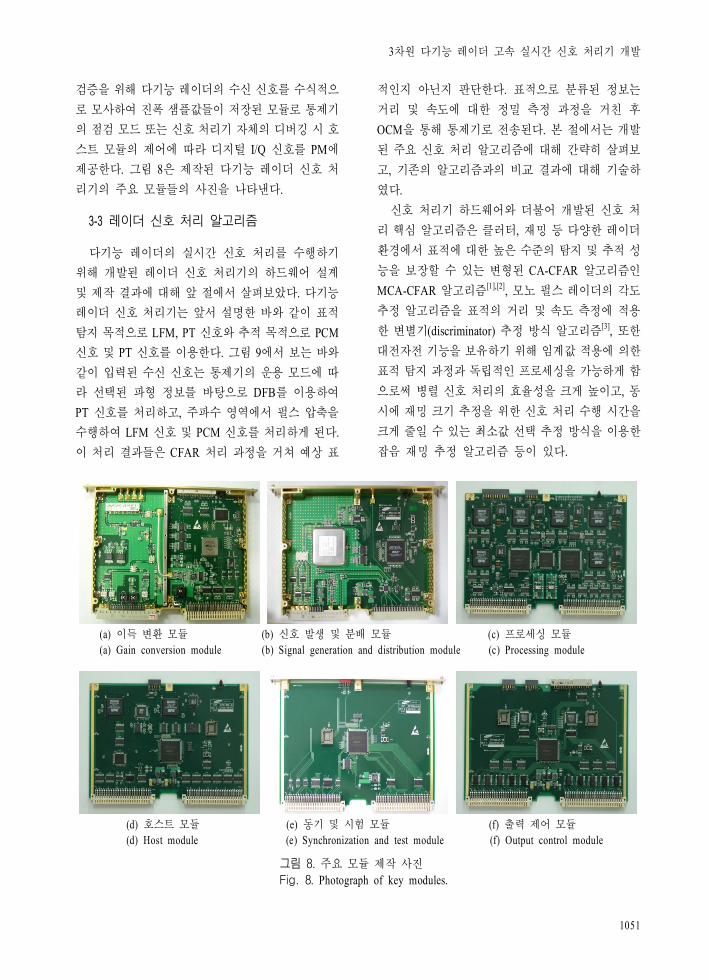
제공한다. 그림 8은 제작된 다기능 이더 신호 처
리기의 주요 모듈들의 사진을 나타낸다.
3-3 이 신 처리 알고리즘
다기능 이더의 실시간 신호 처리를 수행하기
해 개발된 이더 신호 처리기의 하드웨어 설계
제작 결과에 해 앞 에서 살펴보았다. 다기능
이더 신호 처리기는 앞서 설명한 바와 같이 표
탐지 목 으로 LFM, PT 신호와 추 목 으로 PCM
신호 PT 신호를 이용한다. 그림 9에서 보는 바와
같이 입력된 수신 신호는 통제기의 운용 모드에 따
라 선택된 형 정보를 바탕으로 DFB를 이용하여
PT 신호를 처리하고, 주 수 역에서 펄스 압축을
수행하여 LFM 신호 PCM 신호를 처리하게 된다.
이 처리 결과들은 CFAR 처리 과정을 거쳐 상 표
(a) 이득 변환 모듈 (b) 신호 발생 분배 모듈 (c) 로세싱 모듈
(a) Gain conversion module (b) Signal generation and distribution module (c) Processing module
(d) 호스트 모듈 (e) 동기 시험 모듈 (f) 출력 제어 모듈
(d) Host module (e) Synchronization and test module (f) Output control module
그림 8. 주요 모듈 제작 사진
Fig. 8. Photograph of key modules.
인지 아닌지 단한다. 표 으로 분류된 정보는
거리 속도에 한 정 측정 과정을 거친 후
OCM을 통해 통제기로 송된다. 본 에서는 개발
된 주요 신호 처리 알고리즘에 해 간략히 살펴보
고, 기존의 알고리즘과의 비교 결과에 해 기술하
다.
신호 처리기 하드웨어와 더불어 개발된 신호 처
리 핵심 알고리즘은 클러터, 재 등 다양한 이더
환경에서 표 에 한 높은 수 의 탐지 추 성
능을 보장할 수 있는 변형된 CA-CFAR 알고리즘인
MCA-CFAR 알고리즘[1],[2], 모노 펄스 이더의 각도
추정 알고리즘을 표 의 거리 속도 측정에 용
한 변별기(discriminator) 추정 방식 알고리즘[3], 한
자 기능을 보유하기 해 임계값 용에 의한
표 탐지 과정과 독립 인 로세싱을 가능하게 함
으로써 병렬 신호 처리의 효율성을 크게 높이고, 동
시에 재 크기 추정을 한 신호 처리 수행 시간을
크게 일 수 있는 최소값 선택 추정 방식을 이용한
잡음 재 추정 알고리즘 등이 있다.

韓國電磁波學會論文誌 第 22 卷 第 12 號 2011年 12月
1052
그림 9. 신호 처리 소 트웨어 구조 흐름
Fig. 9. RSP SW architecture and flow.
3-3-1 펄스 압축 알고리즘
최 필터링을 이용한 펄스 압축은 송신 신호를
기 신호로 하여 수신된 신호와 시간 역에서 컨
벌루션을 주 수 역에서는 곱셈을 수행함으로써
출력 SNR을 최 화하는필터링 과정을 의미하며, 다
기능 이더의 표 탐지를 해 사용된다. 최 필
터링은 병렬, 실시간 신호 처리의 에서 입력 샘
수와 섹션 수를 고려한 계산량 알고리즘 하
드웨어의 구 용이성 등을 고려하여 다양한 방식으
로 구 이 가능하다. 신호 처리기의 실시간 병렬 처
리 에서 주 수 역에서의 DFT(Discrete Fourier
Transform)-IDFT(Inverse DFT) 방식 (그림 10(a))으로
구 하 다. 입력 샘 이 ( 0, 1, …, 1)이
라 할 때, 의 DFT 는 식 (2-a)와 같이 주어
지며, 주 수 역에서 기 신호( )과의 곱셈
을 수행한 후 식 (2-b)의 IDFT를 통해 시간 역(거
리축)에 한 응답을 구하도록 설계되었다.
, ⋯
(2a)
,
⋯ (2b)
(a) 구조
(a) Processing structure
(b) 최 필터링 결과(LFM)
(b) LFM matched filtering result
그림 10. 주 수 역에서의 최 필터링
Fig. 10. Optimum filtering in the frequency domain.
주 수 역에서의 DFT-IDFT 방식은 시간 역
에서의 상호 결합 방식(correlation processing)에 비해
섹션수가많을경우계산량이 어병렬, 고속신호처
리 구조에서 구 하는데 더 효율 인 방식이다. 그
림 10(b)는 LFM 신호를 이용한 최 필터링 결과를
나타낸다. 수신 신호를 18개의 섹션으로 구분하여
각각의 DSP에서 병렬 처리한 후 펄스 압축결과들을
합하여 CFAR 탐지를 수행하게 된다. 펄스 압축시
부엽에 의한 근 표 간섭을 최소화하기 해
도우를 이용하여 부엽의 수 을 억제하도록 설계되
었으며, 사용된 원도우 함수는 Hamming 원도우[12]를
이용하 다. LFM 신호의 최 필터링 과정에
용된 Hamming 도우 함수는 1.5 dB 이하의 손실,
—40 dB 이상의 부엽 억제 수 을 갖도록 설계되
었다.
3차원 다기능 이더 고속 실시간 신호 처리기 개발
1053
3-3-2 펄스-열 처리 알고리즘
다기능 이더에서는 클러터 환경에서의 표 탐
지/추 목 으로 펄스-열 신호를 이용한다. 펄스열
에서의 신호 처리는 주 수 역에서 처리함으로 인
해 자연히 클러터 성분의 신호들을 확인하고 처리할
수 있는 기반이 된다. 신호 처리기의 실시간 병렬 처
리 에서 1개의 DSP에서 2개의 거리 채 데이
터를 처리하도록 구 하 다. 펄스열의 경우, 처리할
데이터량이 많은 계로 거리 채 의 배치로 인해
야기되는 걸침 손실(straddling loss)은 최 한 이고,
거리 채 의 수가 불필요하게 늘어나지 않도록 거리
채 을 첩되게 배치했으며, 한 거리 채 에 펄
스 분 기법을 사용하 다. 이 기법을 사용하면 비
록 표 의 속도에 따라서 거리 채 에서의 손실이
발생할 수 있지만 미미한 것으로 분석되었고, 반면
연산량과 연산시간에서 이 을 가진다. p-번째 펄스
반복 주기(PRI)에서 획득한 i-번째 샘 을 라 하
면, 의 주 수 스펙트럼은
(3)
과 같이 주어지고, 는 처리되어야 하는 펄스 수,
( )는 펄스 반복 주기, 는 샘 링 주 수
를 나타낸다. 측하고자 하는 k-번째 주 수, 와
PRF( )는 와 같은 계를 가지며,
는 m-번째 인터벌을 나타낸다. 식 (3)에
신 를 입하여 정리하면
(4a)
(4b)
(4c)
와 같다. 식 (4-c)에서 는 (4-b)의 두 번째 합성분
을 나타내며, 입력 샘 의 DFT를 의미한다.
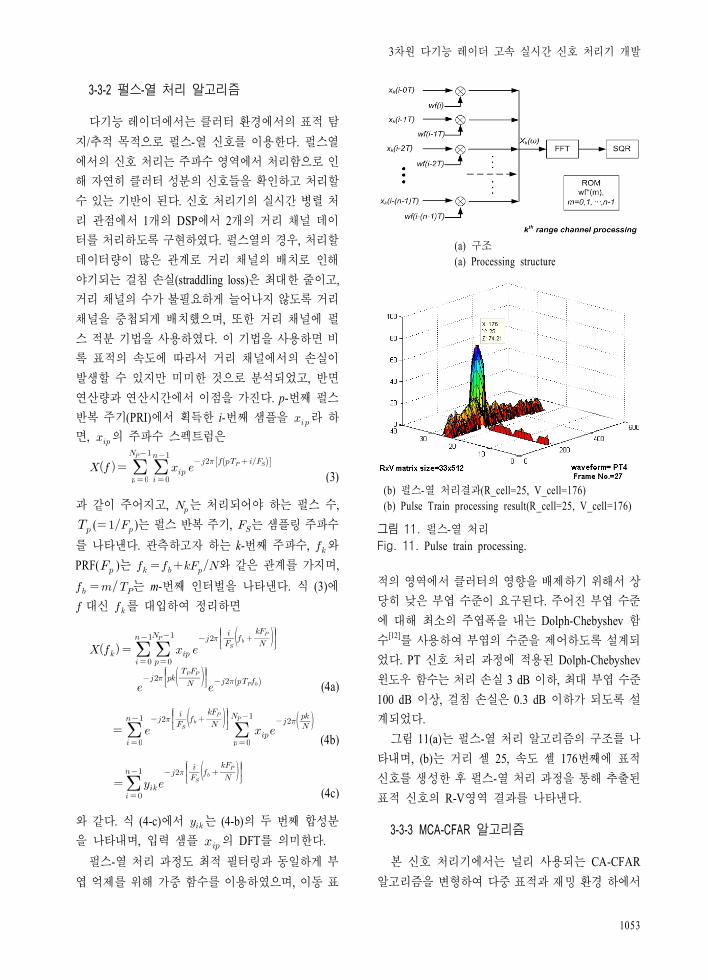
펄스-열 처리 과정도 최 필터링과 동일하게 부
엽 억제를 해 가 함수를 이용하 으며, 이동 표
(a) 구조
(a) Processing structure
(b) 펄스-열 처리결과(R_cell=25, V_cell=176)
(b) Pulse Train processing result(R_cell=25, V_cell=176)
그림 11. 펄스-열 처리
Fig. 11. Pulse train processing.
의 역에서 클러터의 향을 배제하기 해서 상
당히 낮은 부엽 수 이 요구된다. 주어진 부엽 수
에 해 최소의 주엽폭을 내는 Dolph-Chebyshev 함
수[12]를 사용하여 부엽의 수 을 제어하도록 설계되
었다. PT 신호 처리 과정에 용된 Dolph-Chebyshev
도우 함수는 처리 손실 3 dB 이하, 최 부엽 수
100 dB 이상, 걸침 손실은 0.3 dB 이하가 되도록 설
계되었다.
그림 11(a)는 펄스-열 처리 알고리즘의 구조를 나
타내며, (b)는 거리 셀 25, 속도 셀 176번째에 표
신호를 생성한 후 펄스-열 처리 과정을 통해 추출된
표 신호의 R-V 역 결과를 나타낸다.
3-3-3 MCA-CFAR 알고리즘
본 신호 처리기에서는 리 사용되는 CA-CFAR
알고리즘을 변형하여 다 표 과 재 환경 하에서
韓國電磁波學會論文誌 第 22 卷 第 12 號 2011年 12月
1054
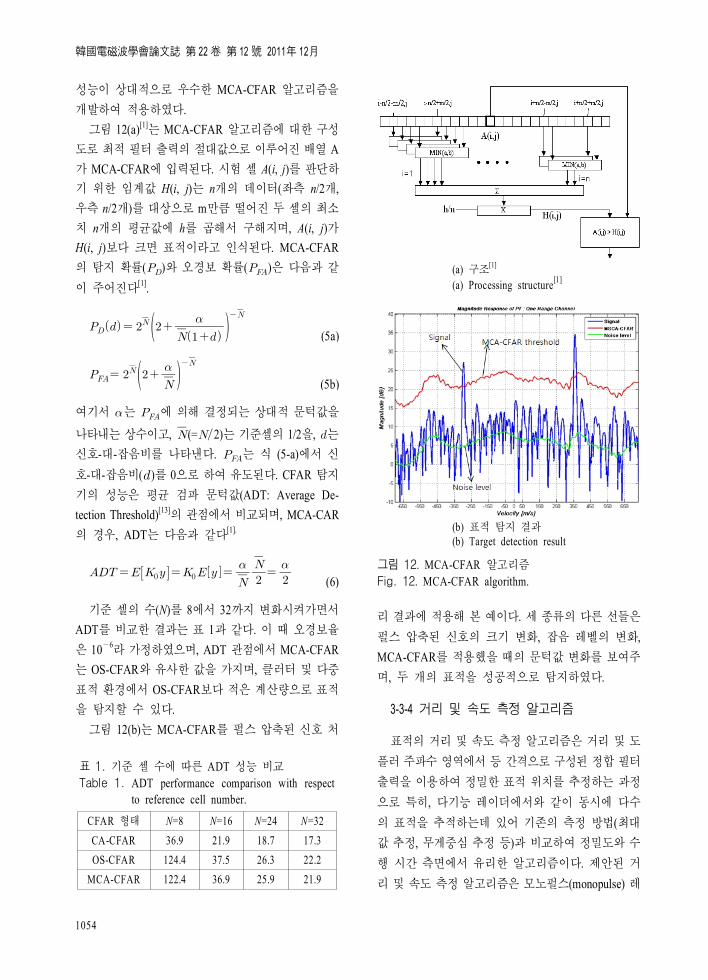
성능이 상 으로 우수한 MCA-CFAR 알고리즘을
개발하여 용하 다.
그림 12(a)[1]는 MCA-CFAR 알고리즘에 한 구성
도로 최 필터 출력의 값으로 이루어진 배열 A
가 MCA-CFAR에 입력된다. 시험 셀 A(i, j)를 단하
기 한 임계값 H(i, j)는 n개의 데이터(좌측 n/2개,
우측 n/2개)를 상으로 m만큼 떨어진 두 셀의 최소
치 n개의 평균값에 h를 곱해서 구해지며, A(i, j)가
H(i, j)보다 크면 표 이라고 인식된다. MCA-CFAR
의 탐지 확률()와 오경보 확률()은 다음과 같
이 주어진다[1].
(5a)
(5b)
여기서 는 에 의해 결정되는 상 문턱값을
나타내는상수이고, (=2)는기 셀의 1/2을, 는
신호- -잡음비를 나타낸다. 는 식 (5-a)에서 신
호- -잡음비()를 0으로 하여 유도된다. CFAR 탐지
기의 성능은 평균 검 문턱값(ADT: Average De-
tection Threshold)[13]의 에서 비교되며, MCA-CAR
의 경우, ADT는 다음과 같다[1].
(6)
기 셀의 수(N)를 8에서 32까지 변화시켜가면서
ADT를 비교한 결과는 표 1과 같다. 이 때 오경보율
은 10—6라 가정하 으며, ADT 에서 MCA-CFAR
는 OS-CFAR와 유사한 값을 가지며, 클러터 다
표 환경에서 OS-CFAR보다 은 계산량으로 표
을 탐지할 수 있다.
그림 12(b)는 MCA-CFAR를 펄스 압축된 신호 처
표 1. 기 셀 수에 따른 ADT 성능 비교
Table 1. ADT performance comparison with respect
to reference cell number.
CFAR 형태 N=8 N=16 N=24 N=32
CA-CFAR 36.9 21.9 18.7 17.3
OS-CFAR 124.4 37.5 26.3 22.2
MCA-CFAR 122.4 36.9 25.9 21.9
(a) 구조[1]
(a) Processing structure[1]
(b) 표 탐지 결과(b) Target detection result
그림 12. MCA-CFAR 알고리즘
Fig. 12. MCA-CFAR algorithm.
리 결과에 용해 본 이다. 세 종류의 다른 선들은
펄스 압축된 신호의 크기 변화, 잡음 벨의 변화,
MCA-CFAR를 용했을 때의 문턱값 변화를 보여주
며, 두 개의 표 을 성공 으로 탐지하 다.
3-3-4 거리 속도 알고리즘
표 의 거리 속도 측정 알고리즘은 거리 도
러주 수 역에서등 간격으로구성된 정합필터
출력을 이용하여 정 한 표 치를 추정하는 과정
으로 특히, 다기능 이더에서와 같이 동시에 다수
의 표 을 추 하는데 있어 기존의 측정 방법(최
값 추정, 무게 심 추정 등)과 비교하여 정 도와 수
행 시간 측면에서 유리한 알고리즘이다. 제안된 거
리 속도 측정 알고리즘은 모노펄스(monopulse)
3차원 다기능 이더 고속 실시간 신호 처리기 개발
1055
이더 각도 추정에 사용되는 알고리즘을 거리 속
도 측정에 용한 것으로 변별기(discriminator) 추정
방식이라 불리며, 연결 구간 내 최 값을 갖는 셀을
기 으로 일정 간격 떨어진 거리 속도 셀값을 이
용하여 거리 속도 값을 측정한다. 변별기 추정 방
식의 거리 속도 측정 계식[3]은
(7)
과 같이 주어지며, 는 추정 라미터 (거리
는 속도)의 측정 후(a posterior) 값, 은 측정 (a
priori) 값을 나타낸다. 식 (7)에서 거리 는 속도 편
차를 나타내는 와 변별기 기울기( ) 는 다음과
같이 주어진다.
(8a)
(8b)
(8c)
여기서 는 거리 채 ( 는 속도 채 ) 간격, ・
는 최 필터의 출력 함수를 나타낸다. 변별기 기울
기를 구하는 식 (8-c)에서 는 기울기 근사화 구간
내에 간격을 갖는 시간을 의미하며, 은 구간
내 샘 수를 나타낸다.
3-3-5 잡 재 추 알고리즘
표 의 탐지 추 정확도를 높이기 해 재
신호와 같은 불요 신호들을 운용시간 신호 처리
시간 에서 효율 으로 제거할 수 있는 방법이
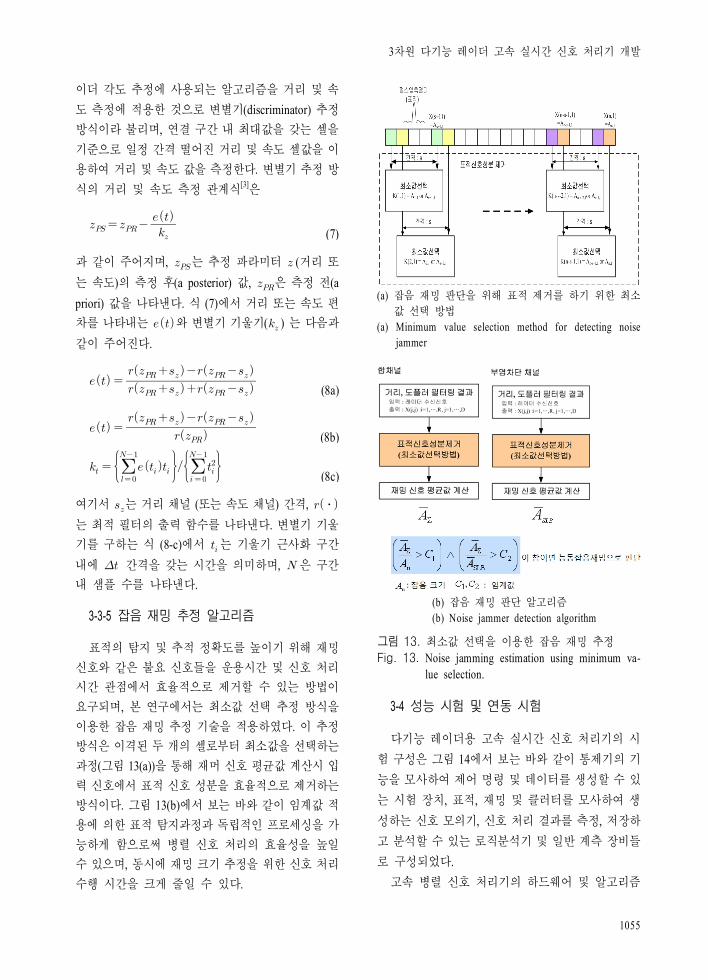
요구되며, 본 연구에서는 최소값 선택 추정 방식을
이용한 잡음 재 추정 기술을 용하 다. 이 추정
방식은 이격된 두 개의 셀로부터 최소값을 선택하는
과정(그림 13(a))을 통해 재머 신호 평균값 계산시 입
력 신호에서 표 신호 성분을 효율 으로 제거하는
방식이다. 그림 13(b)에서 보는 바와 같이 임계값
용에 의한 표 탐지과정과 독립 인 로세싱을 가
능하게 함으로써 병렬 신호 처리의 효율성을 높일
수 있으며, 동시에 재 크기 추정을 한 신호 처리
수행 시간을 크게 일 수 있다.
(a) 잡음 재 단을 해 표 제거를 하기 한 최소
값 선택 방법
(a) Minimum value selection method for detecting noise
jammer
(b) 잡음 재 단 알고리즘
(b) Noise jammer detection algorithm
그림 13. 최소값 선택을 이용한 잡음 재 추정
Fig. 13. Noise jamming estimation using minimum va-
lue selection.
3-4 성능 시험 연동 시험
다기능 이더용 고속 실시간 신호 처리기의 시
험 구성은 그림 14에서 보는 바와 같이 통제기의 기
능을 모사하여 제어 명령 데이터를 생성할 수 있
는 시험 장치, 표 , 재 클러터를 모사하여 생
성하는 신호 모의기, 신호 처리 결과를 측정, 장하
고 분석할 수 있는 로직분석기 일반 계측 장비들
로 구성되었다.
고속 병렬 신호 처리기의 하드웨어 알고리즘

韓國電磁波學會論文誌 第 22 卷 第 12 號 2011年 12月
1056
그림 14. 시험 구성 사진
Fig. 14. Photograph of test configuration.
(a) DSP별 신호 처리 결과(진폭 성분 문턱값)
(a) Signal processing results for each DSP(amplitude and
threshold value)
(b) 신호 처리 출력 결과
(b) Signal processing result
그림 15. PCM 신호 처리 결과(R-V 매트릭스)
Fig. 15. Result of PCM signal processing(R-V matrix).
성능을 확인하기 모의된 클러터 환경에서 임의의 거
리 속도를 갖는 표 신호를 신호모의기[14]를 통
해 모사하 으며, LFM 신호를 이용한 표 탐지 성
능을 확인하기 안테나 빔 폭내 3개의 표 을 각각
10, 25 38 km에 모사하여 펄스 압축 알고리즘과
CFAR 탐지 성능을 그림 10(b)와 같이 확인하 다.
표 의 탐지 추 성능을 확인하기 해 신호
모의기로부터 2개의 독립된 표 을 생성한 후, 펄스
압축 CFAR 탐지 성능을 그림 15의 (a), (b)와 같
이 확인하 다. 그림 15(a)는 PCM 신호 처리 결과를
R-V(Range-Velocity) 매트릭스에 도시한 것으로 각각
의 거리 게이트별로 CFAR 처리한 결과, 2개의 분리
된 표 이 검출되었다. 그림 15(a)에서 R, V 게이트
좌표로는 (R_cell=83, V_cell=3), (R_cell=203, V_cell=
7)에서 가장 큰 신호를 포착할 수 있으며, 각각 거
리 22 km 부근에서 300 m/s로 진입하는 표 과 거리
25 km 부근에서 1,000 m/s로 진입하는 표 을 의미
한다.
클러터 환경에서 표 탐지 추 에 사용되는
(a) DSP별 신호 처리 결과(진폭 성분 문턱값)
(a) Signal processing results for each DSP(amplitude and
threshold value)
(b) 신호 처리 출력 결과
(b) Signal processing result
그림 16. PT 신호 처리 결과(R-V 매트릭스)
Fig. 16. Result of PT signal processing(R-V matrix).
3차원 다기능 이더 고속 실시간 신호 처리기 개발
1057
PT 신호의 성능을 보기 해 2개의 표 신호를 신
호모의기를 통해 모사하여 펄스-열 처리 알고리즘을
검증하 다. 그림 16의 (a)와 (b)는 펄스-열 신호의
신호 처리 결과로 R-V 매트릭스에 도시한 것이며,
각각의 거리 게이트별로 CFAR 처리한 결과, 2개의
분리된 표 이 검출됨을 확인할 수 있다. 그림 16(a)
에서 R-V 매트릭스 상의 표 게이트 좌표로는 각각
(R_cell =11, V_cell=214), (R_cell=27, V_cell=72)에서
가장 큰 신호를 검출하 으며, 거리 992 m에서 200
m/s로 퇴각하는 표 과, 1,987 m에서 300 m/s로 진입
하는 표 에 한 신호 처리 결과이다. 한, zero도
러 역에 존재하는 클러터 신호를 그림 16(b)에
서 확인할 수 있으며, zero 도 러 역에 근 한 표
의 탐지/추 성능을 향을 이기 해 도 러
필터 뱅크 0을 기 으로 ±10개의 필터 출력을 제한
함을 확인할 수 있다.
Ⅳ. 맺 말
본 논문에서는 다기능 이더용 고속 병렬 실시
간 신호 처리기의 설계, 제작 알고리즘 성능 시험
결과에 해 기술하 다. 신호 처리기는 표 반사
신호를 수신하여 실시간으로 다수의 표 을 탐지,
추 하고 거리 각도 정보를 제공하는 다기능
이더의 핵심 구성품으로 ADSP-21160 DSP를 용하
여 구 된 하드웨어에 개발된 신호 처리 알고리즘을
탑재하여 성능 시험을 통해 다기능 이더의 요구
성능 기능이 만족됨을 확인하 다.
참 고 헌
[1] 신상진, 박성철, 박진규, "수정된 CA-CFAR 알고
리듬 연구", 제14회 지상무기체계발 세미나, 항
공/유도/방공 분과, 2006년.
[2] Jin Mo Yang, Whan Woo Kim, "Performance ana-
lysis of a minimum selected cell-averaging CFAR
detection", 11th IEEE International Conference on
Communication Technology Proceedings, pp. 442-
445, 2008.
[3] 최병 , 이범석, 김환우, "변별기 추정 방식을
용한 다기능 이다용 거리 속도 측정 알고리
즘 성능 분석", 한 자공학회지, 42 SP(1), pp.
109-117, 2005년.
[4] ADSP-21160 SHARC Technical Specification Rev.
3.0, Analog Devices.
[5] 신 익 외, " 이더 성능 안정화를 한 잡음
AGC", 한 자공학회 하계종합학술 회, 30
(2P1), pp. 227-228, 2007년.
[6] 양진모, 염동진, 임정수, "다기능 이더 신호 처
리기 아날로그부 성능 분석", 국방과학연구소,
TEDC-509-020408, 2002년.
[7] PE4302 RF Digital Attenuator, Peregrine Semi-
conductor.
[8] A. V. Oppenheim, Ed., Application of Digital Signal
Processing, Prentice-Hall, Englewood Cliffs, 1978.
[9] LTC2207/2206 16-bit ADC, Linear Technology.
[10] ADSP-2183 DSP Microcomputer, Analog Devices.
[11] AFL270XXD Series Hybrid DC/DC Converters,
International Rectifier.
[12] Fredric J. Harris, "On the use of windows for
harmonic analysis with the discrete fourier trans-
form", Proceedings of the IEEE, vol. 66, no. 1, pp.
51-83, 1978.
[13] P. P. Gandhi, S. A. Kassam, "Analysis of CFAR
processors in nonhomogeneous background", IEEE
Trans. on AES, vol. 24, no. 4, pp. 427-445, 1988.
[14] 노지은, 양진모 외, "다채 직 디지털 합성을
이용한 이더 반사 신호 모의장치", 한국 자
학회, 22(10), pp. 966-980, 2011년 10월.

韓國電磁波學會論文誌 第 22 卷 第 12 號 2011年 12月
1058
노 지 은
2002년 2월: 포항공과 학교 컴퓨
터공학과 (공학석사)
2006년 2월: 포항공과 학교 컴퓨
터공학과 (공학박사)
2006년 2월~ 재: 국방과학연구소
선임연구원
[주 심분야] 이더 신호 처리, 통
제 알고리즘 등
최 병
1993년 2월: 경북 학교 자공학
과 (공학석사)
2006년 2월: 충남 학교 자공학
과 (공학박사)
2006년 2월~ 재: 국방과학연구소
선임연구원
[주 심분야] 신호 처리 알고리즘
등
이 희
2007년 2월: 포항공과 학교 자
기공학과 (공학석사)
2007년 2월~ 재: 국방과학연구소
선임연구원
[주 심분야] 이더 시스템 신
호 처리 등
양 진 모
1991년 2월: 아주 학교 자공학
과 (공학석사)
2011년 2월: 충남 학교 자공학
과 (공학박사)
1991년 2월~ 재: 국방과학연구소
선임연구원
[주 심분야] 이더 시스템, 신호
처리 등
이 철
2000년 2월: 북 학교 정보통신
공학과 (공학석사)
2002년 1월~ 재: 삼성탈 스
문연구원
[주 심분야] 이더 신호 처리
병렬 처리구조 최 화 등
이 동 휘
2007년 2월: 운 학교 자공학
과 (공학석사)
2006년 12월~ 재: 삼성탈 스 선
임연구원
[주 심분야] 디지털 신호 처리
병렬구조처리 등
정 래 형
2001년 2월: 동아 학교 기공학
과 (공학석사)
2001년 1월~ 재: 삼성탈 스 무
연구원
[주 심분야] 디지털 신호 처리
알고리즘 개발 등
김 태 환
2006년 2월: 한국항공 학교 정보
통신공학과 (공학석사)
2005년 10월~ 재: 삼성탈 스 선
임연구원
[주 심분야] 고주 , 이더 신
호 처리 등

3차원 다기능 이더 고속 실시간 신호 처리기 개발
1059
이 민
1988년 2월: 서강 학교 자공학
과 (공학석사)
1999년 2월: 한국과학기술원 기
자공학과 (공학박사)
1988년 2월~ 재: 국방과학연구소
책임연구원
[주 심분야] 이더 시스템, 신호
처리 등



![[AWS에서의 미디어 및 엔터테인먼트] 클라우드에서의 고속 데이터 전송](https://static.fdocuments.net/doc/165x107/54b4c2b04a7959217c8b46c3/aws-54b4c2b04a7959217c8b46c3.jpg)














