Drilled Shaft in Rock Analysis and Design_Part2
109
(4.32) (4.33) for i=x, y, z with j=y, z, x and k=z, x, y. These equations describe the rock mass elastic properties completely. The single discontinuity model is a special case of the foregoing in which s x =s y =∞. Singh (1973), Amadei (1983), Chen (1989) and Amadei and Savage (1993) obtained the same expressions as above for deformation properties of rock masses containing three orthogonal discontinuity sets. For engineering convenience, it is useful to define a modulus reduction factor, α E , which represents the ratio of the rock mass to rock material modulus. This factor can be obtained by re-writing Equation (4.31) as (4.34) The relationship is plotted in Figure 4.16. This figure shows smaller values of α E in rock masses with softer discontinuities (larger E r /k n values). Unfortunately, the mean discontinuity spacing is not easy to obtain directly and, in normal practice, RQD values are determined instead. Using a physical model, the RQD can be correlated with the number of discontinuities per 1.5 meters (5 ft) core run, a common measure in practice. This relationship is shown in Figure 4.17. Combining Figures 4.16 and 4.17 yields Figure 4.18, which relate α E and RQD with E r /k n as an additional parameter. Drilled shafts in rock 106
-
Upload
rshaghayan -
Category
Documents
-
view
306 -
download
5
Transcript of Drilled Shaft in Rock Analysis and Design_Part2

(4.32)
(4.33)
for i=x, y, z with j=y, z, x and k=z, x, y. These equations describe the rock mass elastic properties completely. The single discontinuity model is a special case of the foregoing in which sx=sy=∞. Singh (1973), Amadei (1983), Chen (1989) and Amadei and Savage (1993) obtained the same expressions as above for deformation properties of rock masses containing three orthogonal discontinuity sets.
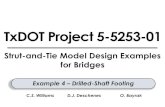
For engineering convenience, it is useful to define a modulus reduction factor, αE, which represents the ratio of the rock mass to rock material modulus. This factor can be obtained by re-writing Equation (4.31) as
(4.34)
The relationship is plotted in Figure 4.16. This figure shows smaller values of αE in rock masses with softer discontinuities (larger Er/kn values).
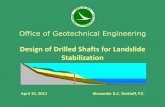
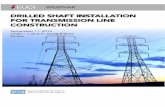
Unfortunately, the mean discontinuity spacing is not easy to obtain directly and, in normal practice, RQD values are determined instead. Using a physical model, the RQD can be correlated with the number of discontinuities per 1.5 meters (5 ft) core run, a common measure in practice. This relationship is shown in Figure 4.17. Combining Figures 4.16 and 4.17 yields Figure 4.18, which relate αE and RQD with Er/kn as an additional parameter.
Drilled shafts in rock 106

Fig. 4.16 Modulus reduction factor versus discontinuity spacing (after Kulhawy, 1978).
Deformability and strength of rock 107

Fig. 4.17 RQD versus number of discontinuities per 1.5m run (after Kulhawy, 1978).
Drilled shafts in rock 108

Fig. 4.18 Modulus reduction factor versus RQD (after Kulhawy, 1978).
Consider the jointed rock under uniaxial loading (as shown in Fig. 4.19). The constitutive relation in the n, s, t coordinate system can be defined from the single discontinuity model of Kulhawy (1978). In the global coordinate system x, y, z, the constitutive relation can be determined using second tensor coordinate transformation rules. In matrix form this gives (Amadei & Savage, 1993).
(ε)xyz=(A)xyz(σ)xyz (4.35)
where and . The components aij=aji (i, j=1−6) of the compliance (A)xyz depend on the dip angle θ as follows:
(4.36a)
Deformability and strength of rock 109

(4.36b)
(4.36c)
Fig. 4.19 Jointed rock under uniaxial loading (after Amadei & Savage, 1993).
(4.36d)
(4.36e)
(4.36f)
(4.36g)
Drilled shafts in rock 110

(4.36h)
(4.36i)
(4.36j)
(4.36k)
All other coefficients aij vanish. Note that for the orientation of the discontinuities considered here, the jointed rock has a plane of elastic symmetry normal to the z-axis. If the discontinuity set is inclined with respect to x and z axes or if the rock sample under consideration has two or three orthogonal discontinuity sets, then new expressions must be derived.
Gerrard (1982a, b, 1991) presented an approximate method for determining the equivalent elastic properties for a rock mass containing several sets of discontinuities. His analysis is based on the assumption that the strain energy stored in the equivalent continuum is the same as that stored in the discontinuous system. The first step is to rank the various discontinuity sets according to their mechanical significance. Taking the least significant set first, a compliance matrix for the equivalent continuum is determined. This equivalent continuum is then regarded as the anisotropic ‘rock material’ for the next discontinuity set, and so on until all discontinuity sets have been incorporated. A rotation matrix must be applied to transform the equivalent continuum compliance matrix from local coordinate axes, associated with one discontinuity orientation, to axes associated with the next. The models for one, two and three sets of discontinuities are briefly described in the following:
1) A single set of discontinuities can be modeled by considering a system of alternating layers of approximately equal spacing. The interfacing planes are perpendicular to the z axis of the coordinate set x, y, z. Material ‘a’ represents the rock material with thickness Ta, material ‘b’ the discontinuity material with thickness Tb, and material ‘c’ is the homogeneous material equivalent to the system of alternating layers of ‘a’ and ‘b’ (see Fig. 4.20). The properties of material ‘c’ can be determined by using a series of equations which are not listed here because they are too cumbersome (Gerrard, 1982a).
2) A second set of planar parallel discontinuities can be incorporated, in this case the discontinuities being perpendicular to the x-axis. Alternating layers of the equivalent material ‘c’, with thickness Tc, and the discontinuity material ‘d’, with thickness Td, taken together can be represented by the equivalent homogeneous material (see Fig. 4.21). In order that material ‘c’ behaves in an effectively homogeneous fashion when it is incorporated into material ‘e’ it is necessary that Tc»Ta+Tb.
Deformability and strength of rock 111

3) The third set of planar parallel discontinuities are perpendicular to the y-axis. In this case the homogeneous equivalent material ‘g’ can represent the alternating layers of equivalent material ‘e’ with thickness Tc and the discontinuity material ‘f with thickness Tf (see Fig. 4.22). In this case, to ensure that material ‘e’ behaves in an effectively homogeneous fashion when it is incorporated into material ‘g’ it is necessary that Te»Tc+Td.
Fossum (1985) derived a constitutive model for a rock mass that contains randomly oriented discontinuities of constant normal stiffness kn and shear stiffness ks. He assumed that if the discontinuities are randomly oriented, the mean discontinuity spacing would be the same in all directions taken through a representative sample of the mass. Arguing that the mechanical properties of the discontinuous mass would be isotropic, Fossum derived the following expressions for the bulk modulus Km and shear modulus Gm of the equivalent elastic continuum:
(4.37)
Fig. 4.20 One dimensional system of discontinuities (after Gerrard, 1982a).
Drilled shafts in rock 112

Fig. 4.21 Two dimensional system of discontinuities (after Gerrard, 1982a).
(4.38)
The equivalent Young’s modulus and Poisson’s ratio can be obtained from
(4.39)
(4.40)
Deformability and strength of rock 113

Fig. 4.22 Three dimensional system of discontinuities: (a) Representation in the x-y plane; (b) Oblique view of discontinuities (after Gerrard, 1982a).
At large values of mean discontinuity spacing s the equivalent modulus Em and Poisson’s ratio νm approach the values Er and νr for the intact rock material. At very small values of mean discontinuity spacing the equivalent modulus Em and Poisson’s ratio νm are given by the following expressions
(4.41)
Drilled shafts in rock 114

(4.42)
Considering the fact that the available methods do not consider the statistical nature of jointed rock masses, Dershowitz et al. (1979) present a statistically based analytical model to examine rock mass deformability. The statistical model is shown in Figure 4.23. The rock is taken as a three dimensional circular cylinder. Deformation is assumed to accrue both from the elasticity of intact rock and from displacement along discontinuities. Displacements along intersecting discontinuities are assumed to be independent. In this model compatibility of lateral displacements across jointed blocks is approximated by constraining springs. Inputs to the model include stififness and deformation moduli, stress state, and discontinuity geometry. Intact rock deformability is expressed by Young’s modulus Er, set at 200,000 kg/cm2, a typical value. Discontinuity stiffnesses are represented by normal stiffness kn set at 1,000,000 kg/cm3, and shear stiffness ks set at 200,000 kg/cm3. The stress state is described by vertical major principal stress σ1, horizontal “confining” stress σ3. “Confining” stress σ3 is determined from initial stress σ30 and a spring constant kg as follows
σ3=σ30+kgδy (4.43)
where δy is the calculated horizontal displacement; σ30 is set to 50 kg/cm2; and kg is set at 2500 kg/cm3, a value chosen to maximize the increase of stress with lateral strain without causing rotation of principal planes.
Discontinuity geometry is described by three parameters: the mean spacing sm, the mean orientation θm and the dispersion according to the Fisher model κ. Spacing is assumed to follow an exponential distribution and orientation a Fisher distribution (Table 4.2).
Table 4.2 Distribution assumptions for deformation model (after Dershowitz et al., 1979).
Discontinuity property
Distribution form
Spacing Exponential: λe−λs, λ=(mean spacing)−1
Size (Persistence) Completely persistent
Orientation
Normal stiffness Deterministic
Shear stiffness Deterministic
Some of the results are shown in Figures 4.24 to 4.27. The results show that the proposed model is consistent with the results of Deere et al. (1967) and Coon and Merritt (1970)
Deformability and strength of rock 115

(see Fig. 4.10), to the extent that the relationships between deformation and RQD are of similar form.
The model proposed by Dershowitz et al. (1979) has the following limitations:
1) The analysis applies only to “hard” rock. Shears and weathering can only be accommodated through changes in discontinuity stiffnesses, which is inadequate.
2) The analysis is for infinitesimal strains. Finite strains would violate the assumption of independence among discontinuity displacements.
3) The analysis is for a homogeneous deterministic stress field specified extraneous to the discontinuity pattern. Real rock masses may have complex stress distributions strongly influenced by the actual jointing pattern.
4) Boundary conditions are highly idealized.
Fig. 4.23 Statistical model for jointed rock (after Dershowitz et al., 1979).
Drilled shafts in rock 116

Fig. 4.24 Relationship between Em/Er and RQD, parallel discontinuities (after Dershowitz et al., 1979).
(b) Rock mass with non-persistent discontinuities
For rock masses with non-persistent discontinuities, relationships between the deformation properties and the fracture tensor parameters in two and three dimensions have been derived by Kulatilake et al. (1992, 1993) and Wang (1992) from the discrete element method (DEM) analysis results of generated rock mass blocks. The procedure used to evaluate the effect of discontinuities and the obtained relationships between the deformation properties and the fracture tensor parameters in three dimensions are outlined in the following.
Fig. 4.25 Relationship between the mean of Em/Er, E[Em/Er], and the mean of RQD, E[RQD], subparallel discontinuities distributed according to Fisher (after Dershowitz et al., 1979).
Deformability and strength of rock 117

Fig. 4.26 Relationship between the standard deviation of Em/Er, SD[Em/Er], and the mean of RQD, E[RQD], subparallel discontinuities distributed according to Fisher (after Dershowitz et al., 1979).
The procedure for evaluating the effect of discontinuities on the deformability of rock masses is shown in Figure 4.28. The first step is the generation of non-persistent discontinuities in 2 m cubical rock blocks. The discontinuities were generated in a systematic fashion as follows:
Fig. 4.27 Effect of stiffness values on modulus ratio Em/En parallel discontinuities (after Dershowitz et al., 1979).
Drilled shafts in rock 118

1) In each rock block, a certain number of discontinuities having a selected orientation and a selected discontinuity size were placed to represent a discontinuity set.
2) Discontinuities were considered as 2D circular discs. 3) Discontinuity center locations were generated according to a uniform distribution. 4) Either a single discontinuity set or two discontinuity sets were included in each rock
block.
The generated discontinuity networks in the rock blocks are given in Table 4.3.
Table 4.3. Generated discontinuity networks of actual discontinuities in the rock block for 3D DEM analysis (after Kulatilake et al., 1992, 1993).
Number of discontinuity sets
Orientation α/β
Discontinuity size/ block size
Number of discontinuities
Discontinuity location
One set 60°/45° 0.1–0.9 with step 0.1
5, 10, 20, 30 Uniform
94.42°/37.89° 0.3, 0.5, 0.6, 0.7, 0.9
5, 10, 20, 30 distribution
30°/45° 0.3, 0.5, 0.6, 0.7, 0.8, 0.9
5, 10, 20,
90°/45° 0.3, 0.5, 0.6, 0.7, 0.8, 0.9
5, 10, 20
68.2°/72.2° 0.3, 0.6, 0.7, 0.8 5, 10, 20, 30
248.9°/79.8° 0.3, 0.6, 0.7,0.8 5, 10, 20, 30
Two sets 60°/45° 0.1, 0.2, 0.3, 0.5, 0.6, 0.7
10
240°/60° 10
Deformability and strength of rock 119

Fig. 4.28 Procedure for evaluating the effect of discontinuity geometry parameters on the deformability properties of jointed rock (after Kulatilake et al., 1993).
The second step is the generation of fictitious discontinuities according to the actual nonpersistent discontinuity network generated in the rock block. In order to use the DEM for 3D analyses of a generated rock block, the block should be discretized into polyhedra. Since a typical non-persistent discontinuity network in 3D may not discretize the block into polyhedra, it is necessary to create some type of fictitious discontinuities so that when they are combined with actual discontinuities, the block was discretized into polyhedra. Before the generation of fictitious discontinuities, the actual disc-shaped discontinuities are converted into square-shaped ones having the same area. In order for the fictitious discontinuities to simulate the intact rock behavior, an appropriate constitutive model and associated parameter values for the fictitious discontinuities have to be found. From the investigation performed on 2D rock blocks, Kulatilake et al. (1992) found that by choosing the mechanical properties of the fictitious discontinuities in the
Drilled shafts in rock 120

way given below, it is possible to make the fictitious discontinuities behave as the intact rock:
Table 4.4. Values for the mechanical parameters of intact rock, actual and fictitious discontinuities used by Kulatilake et al. (1992, 1993) and Wang (1992).
Intact rock or Discontinuities Parameter Assigned value
Intact rock Young’s modulus Er 60 GPa
Poisson’s ratio νr 0.25
Cohesion cr 50 MPa
Tensile strength tr 10 MPa
Friction coefficient 0.839
Fictitious discontinuities Normal stiffness kn 5000 GPa/m
Shear stiffness ks 2000 GPa/m
Cohesion cj 50MPa
Dilation coefficient dj 0
Tensile strength tj 10 MPa
Friction coefficient 0.839
Actual discontinuities Normal stiffness kn 67.2 GPa/m
Shear stiffness ks 2.7 GPa/m
Cohesion cj 0.4 MPa
Tensile strength tj 0
Friction coefficient 0.654
(a) The strength parameters of the fictitious discontinuities are the same as those of the intact rock.
(b) Gr/ks=0.008–0.012. (c) kn/ks=2–3, with the most appropriate value being Er/Gr.
For the intact rock (granitic gneiss) studied by Kulatilake et al. (1992, 1993) and Wang (1992), the approximate parameters of the fictitious discontinuities are shown in Table 4.4. The mechanical parameters of the actual discontinuities used by them are also shown in this table. The constitutive models used for the intact rock and discontinuities (both actual and fictitious) are shown in Figures 4.29 and 4.30, respectively.
The third step is the DEM analysis of the rock block (using the 3D distinct element code 3DEC) under different stress paths and the evaluation of the effect of discontinuities on the deformation parameters of the rock mass. In order to estimate different property
Deformability and strength of rock 121

values of the jointed rock block, Kulatilake et al. (1993) and Wang (1992) used the following stress paths:
1) The rock block was first subjected to an isotropic compressive stress of 5 MPa in three perpendicular directions (x, y, z); then, for each of the three directions, e.g. the z-direction, the compressive stress σz was increased, while keeping the confining stresses in the other two directions (σx and σy) the same, until the failure of the rock occurred (see Fig. 4.31). From these analysis results, it is possible to estimate the deformation modulus of the rock block in each of the three directions and the related Poisson’s ratios.
Fig. 4.29 Constitutive model assumed for intact rock: (a) stress versus strain; (b) Coulomb failure criterion with a tension cut-off (after Kulatilake et al., 1993).
Drilled shafts in rock 122

2) The rock block was first subjected to an isotropic compressive stress of 5 MPa in three perpendicular directions (x, y, z); then, on each of the three perpendicular planes, e.g. the x-y plane, the rock was subjected to an increasing shear stress as shown in Figure 4.32. These analysis results can be used to estimate the shear modulus of the rock block on each of the three perpendicular planes.
In the DEM analysis, during the loading process, displacements were recorded simultaneously on each block face in the direction(s) needed to calculate the required block strains. On each block face, five points were selected to record the displacement. The average value of these five displacements was considered as the mean displacement of this face for block strain calculations.
To make it possible to estimate the deformation properties of the rock block from the DEM analysis results, Kulatilake et al. (1993) and Wang (1992) assumed that the rock block was orthotropic in the x, y, z directions, regardless of the actual orientations of the discontinuities, i.e.,
With the above constitutive model, the deformation moduli Ex, Ey, Ez and Poisson’s ratios νxy, νxz, vyx, νyz, νzx, vzy can be estimated from the DEM analysis results of rock blocks under stress path 1 (Fig. 4.31). The shear moduli Gxy, Gxz and Gyz can be estimated from the DEM analysis results of rock blocks under stress path 2 (Fig. 4.32).
To reflect the effect of discontinuity geometry parameters on the deformation properties, Kulatilake, et al. (1993) and Wang (1992) used the fracture tensor defined by Oda (1982) as an overall measure of the discontinuity parameters—discontinuity density, orientation, size and the number of discontinuity sets. For thin circular discontinuities, the general form of the fracture tensor at the 3D level for the kth discontinuity set can be expressed as (see also Chapter 3 about the discussion of fracture tensors)
(4.45)
where ρ is the average number of discontinuities per unit volume (discontinuity density), r is the radius of the circular discontinuity (discontinuity size), n is the unit vector normal to the discontinuity plane, f(n, r) is the discontinuity probability density function of n and r, Ω/2 is a solid angle corresponding to the surface of a unit hemisphere, and ni and nj (i, j=x, y, z) are the components of vector n in the rectangular coordinate system considered (see Fig. 4.33). The solid angle dΩ is also shown in Figure 4.33. If the distributions of the size and the orientation of the discontinuities are independent of each other, Equation
Deformability and strength of rock 123

Fig. 4.30 Constitutive model assumed for joints: (a) normal stress versus normal displacement; (b) shear stress versus shear displacement; and (c) Coulomb failure criterion with a tension cut-off (after Kulatilakeetal., 1993).
Drilled shafts in rock 124

Fig. 4.31 Stress paths of first type used to perform DEM analysis of generated rock blocks (after Kulatilakeetal., 1993).
Fig. 4.32 Stress paths of second type used to perform DEM analysis of generated rock blocks (after Kulatilakeetal, 1993).
Deformability and strength of rock 125

(4.44)
(4.45) can be rewritten as follows
(4.46)
where f(n) and f(r) are the probability density functions of the unit normal vector n and size r, respectively. If there are more than one discontinuity set in the rock mass, the fracture tensor for the rock mass can be obtained by
(4.47)
wher N is the number of discontinuity sets in the rock mass. Fracture tensor Fij can also be written in matrix form as follows
(4.48)
Drilled shafts in rock 126

Fig. 4.33 Unit sphere used to define the solid angle dΩ (after Oda, 1982).
Since the diagonal components of the fracture tensor Fxx, Fyy and Fzz express the combined effect of discontinuity density and discontinuity size in the x, y and z directions, respectively, Kulatilake et al. (1993) and Wang (1992) showed the obtained deformation properties as in Figures 4.34 and 4.35. Putting the data in Figures 4.34(a)–(c) and Figures 4.35(a)–(c) respectively together, Figures 4.36 and 4.37 were obtained, which show that the deformation properties of jointed rock masses are related to the corresponding components of the fracture tensor. As for the Poisson’s ratios of the generated rock blocks, Kulatilake et al. (1993) and Wang (1992) found that they were between 50 and 190% of the intact rock Poisson’s ratio.
(c) Comments
In the equivalent continuum approach, the elastic properties of the equivalent material are essentially derived by examining the behavior of two rock blocks having the same volume and by using an averaging process. One volume is a representative sample of the rock
Deformability and strength of rock 127

Fig. 4.34 Relations between rock block deformation moduli and fracture tensor components for different discontinuity networks: (a) Ez/Er vs Fzz; (b) Ey/Er vs Fyy; and (c) Ex/Er vs Fxx (after Kulatilake et al., 1993).
Drilled shafts in rock 128

Fig. 4.35 Relations between rock block shear moduli and summation of corresponding fracture tensor components for different discontinuity networks: (a) Gxy/Gr vs (Fxx+Fyy); (b) Gxz/Gr vs (Fxx+Fzz); and (c) Gyz/Gr vs (Fyy+Fzz) (after Kulatilake et al., 1993).
Deformability and strength of rock 129

Fig. 4.36 Relations between rock block deformation modulus in any direction Em and the fracture tensor components in the same direction (after Kulatilake et al., 1993).
Fig. 4.37 Relations between rock block shear modulus on any plane Gm and the summation of fracture tensor components on that plane (after Kulatilake et al., 1993).
Drilled shafts in rock 130

mass whereas the second volume is cut from the equivalent continuum and is subject to homogeneous (average) stresses and strains. Therefore, the equivalent continuum approach requires that the representative sample of the rock mass be large enough to contain a large number of discontinuities. On the other hand, the corresponding equivalent continuum volume must also be sufficiently small to make negligible stress and strain variations across it. This leads to a dilemma which is typical in modeling continuous or discontinuous composite media.
Numerous authors have used the equivalent continuum approach and derived the expressions for the equivalent continuum deformation properties. Most of these expressions are based on the assumption that the discontinuities are persistent. This is a conservative assumption since, in reality, most of the discontinuities are non-persistent with finite size.
For a rock mass containing non-persistent discontinuities, Kulatilake et al. (1992, 1993) and Wang (1992) derived relationships between the deformation properties and the fracture tensor parameters from the DEM analysis results of generated rock mass blocks. However, there exist limitations for the method they used and thus for the relationships they derived as follows:
1. The generated rock mass block is assumed to be orthotropic in the x, y, z directions, regardless of the actual orientations of the discontinuities. The appropriateness of this assumption is questionable. For example, the two blocks shown in Figure 4.38 have the same fracture tensor Fij, block 1 containing three orthogonal discontinuity sets while block 2 containing 1 discontinuity set. It is appropriate to assume that block 1 is orthotropic in the x, y, z directions. However, it is obviously inappropriate to assume that block 2 is orthotropic in the x, y, z directions.
2. To do DEM analysis on the generated rock mass block, fictitious discontinuities are introduced so that when they are combined with actual discontinuities, the block is discretized into polyhedra. To make the fictitious discontinuities behave as the intact rock, appropriate mechanical properties have to be assigned to the fictitious discontinuities. From the investigation performed on 2D rock blocks, Kulatilake et al. (1992) found a relationship between the mechanical properties of the fictitious discontinuities and those of the intact rock. However, even if the mechanical properties of the fictitious discontinuities are chosen from this relationship, the fictitious discontinuities can only approximately behave as the intact rock. So the introduction of fictitious discontinuities brings further errors to the final analysis results.
3. Discontinuity persistence ratio PR (defined as the ratio of the actual area of a discontinuity to the cross-section area of the discontinuity plane with the rock block) should have a great effect on the deformability of rock masses. However, the relationships derived by Kulatilake et al. (1992, 1993) and Wang (1992) does not show any effect of PR on the deformability of jointed rock masses.
4. The conclusion that Ei/Er (i=x,y,z) is related only to Fii (i=x,y,z) is questionable. This can be clearly seen from the two rock blocks shown in Figure 4.39. The two blocks have the same fracture tensor component Fzz. From Figure 4.36, the two blocks will have the same deformation modulus in the z-direction. However, block 2 is obviously more deformable than block 1 in the z-direction.
Deformability and strength of rock 131

Fig. 4.38 Two rock blocks having the same fracture tensor but different joint sets: (a) Rock block with three orthogonal joint sets; and (b) Rock block with one joint set.
Fig. 4.39 Two rock blocks having the same fracture tensor component in z-direction but different joint orientations: (a) Rock block with joint normal parallel to z-axis; and (b) Rock block with joint normal inclined from z-axis.
Drilled shafts in rock 132

4.3.4 Direct consideration of discontinuities in numerical analysis
The direct consideration of discontinuities as discrete features is usually done in numerical methods, such as the finite element, boundary element and discrete element methods. Considering the fact that the finite element method (FEM) is the most widely used numerical method in foundation analysis and design, only the methods for representing discontinuities in finite element modeling are described in the following.
The presence of rock discontinuities is considered in finite element analyses by employing special joint elements which describe the localized response of the discontinuities. The various joint elements can be grouped into three general classes (Curran & Ofoegbu, 1993):
(1) joint elements which use the nodal displacements as the independent degrees of freedom (Goodman et al., 1968);
(2) joint elements which use the relative nodal displacements as the independent degrees of freedom (Ghaboussi et al., 1973);
(3) thin-layer continuum elements assigned the behavior of discontinuities (Zienkiewicz et al., 1970; Desai et al., 1984).
These classes of joint elements are briefly discussed below.
(a) Joint elements using nodal displacements as independent degrees-of-freedom
This approach to modeling discontinuities was originally proposed by Goodman et al. (1968) and is still commonly used today. A good summary of the development of the element equations is given in Pande et al. (1990). The basic geometry of the element, for 2D problems, is illustrated in Figure 4.40(a). It has a length L (along the s-axis, i.e. the discontinuity plane) and zero thickness (in the n-axis direction, i.e. normal to the discontinuity plane). It is a four-node element, nodes 1 and 2 lying on the bottom surface (subscript B), while nodes 3 and 4 lie on the top surface (subscript T). The relative displacements ws (shear) and wn (normal) are given by
(4.49)
where the absolute displacements in s and n directions are denoted as u and ν, respectively. Assuming that displacements vary linearly along each boundary and with nodes 1 and 4 at s=−L/2 and nodes 2 and 3 at s=L/2 [Fig. 4.40(a)], the displacements at the bottom and top boundaries are respectively given by
(4.50)
Deformability and strength of rock 133

(4.51)
Drilled shafts in rock 134

Fig. 4.40 Joint elements based on: (a) nodal displacements; (b) relative nodal displacements; and (c) thin-layer solid.
Substituting Equations (4.50) and (4.51) into Equation (4.49), the following can be obtained
Deformability and strength of rock 135

(4.52)
where α=1−2s/L, β=1+2s/L and the vector on the right-hand side is the node displacement vector. For the Goodman model, the vector of the nodal force F is related to the relative displacements w through the equation
(4.53)
where Ks and Kn are the shear and normal stiffness, respectively. Using the minimum energy principle, the equilibrium equation for the element can be obtained in the form
Ku=F (4.54)
where u is the vector of the nodal displacements in Equation (4.52), and
(4.55)
The element’s contribution Kg to the global stiffness matrix is given by
(4.56)
Drilled shafts in rock 136

where θ is the angle measured anti-clockwise from the discontinuity local s-axis to the global x-axis.
The following remarks can be made about Goodman’s joint element:
1) In the derivation above, the properties of discontinuities are assumed to be represented by stiffness of discontinuities Ks and Kn, The stiffness matrix of the discontinuity
has no off-diagonal terms. This implies that there is no dilatancy of discontinuities and the normal and shear behavior are uncoupled.
2) It is possible to formulate higher-order joint elements on the basis of Goodman’s joint element. A procedure of numerical integration will have to be adopted as direct integration is quite cumbersome.
3) Mehtab and Goodman (1970) have extended the formulation of the joint element suitable for three-dimensional analysis. The joint element is a two-dimensional eight-node quadrilateral with the nodes in the thickness direction being coincident.
(b) Joint elements using relative nodal displacements as independent degrees-of-freedom
In this model, introduced by Ghaboussi et al. (1973), the joint element has a finite thickness t and its degrees of freedom are the relative displacements ws and wn, which vary linearly from s=−L/2 to s=L/2 [L is the length of the joint element and the local coordinate system in Fig. 4.40(b) is in effect]. The joint strains εs (shear) and εn (normal) are given by
(4.57)
Hence, the strain can be related to the relative displacements of the element as follows
(4.58)
where subscripts 1 and 2 stand for the two ends of the element, end 1 being at s=−L/2 and end 2 at s=L/2. The stress-strain relation for the discontinuity is given by
(4.59)
Deformability and strength of rock 137

where σs and σn are the shear and normal stresses respectively, and the 2×2 matrix D represents the discontinuity stiffness.
The stiffness matrix K for the joint element in the local coordinate system is given by K=∫BTDBdv
(4.60)
where B is the 2×4 matrix in Equation (4.58). The element’s contribution Kg to the global stiffness matrix can be obtained using Equation (4.56).
Wilson (1977) further developed the technique of using relative displacements for the joint element, including the expansion from two dimensions to three dimensions.
(c) Thin-layer elements
The two classes of joint elements described above differ from solid elements in some fundamental ways, such as structural stiffness matrix, nature of the stress and strain vectors and the strain-displacement relations. Because of these differences, their incorporation into a regular finite element program (which is usually designed for solid elements) requires significant modifications in the code. Desai et al. (1984) proposed the thin-layer element as a means of reducing this problem.
The thin-layer element is basically a solid element, but its properties are assigned in such way that its behavior closely approximate that of a discontinuity. A typical thin-layer element is shown in Figure 4.40(c). This example is a six-node element but a four-node element is acceptable. The stress-strain relations are derived in exactly the same way as for other solid elements.
The main issue for using thin-layer elements in FEM analysis is choosing appropriate material properties and thickness of the element. Desai et al. (1984) originally proposed the thin-layer element mainly for applications in soil-structure interaction problems. Since the interface is surrounded by the geological (soil) and structural materials, Desai et al. (1984) proposed that the normal stiffness (i.e., deformation modulus in the direction normal to the element plane) of the thin-layer element be chosen according to the properties of the interface zone and the structural and geological materials, i.e.,
En=λ1(En)i+λ2(En)g+λ3(En)st (4.61)
where (En)i, (En)g and (En)st are respectively the deformation modulus of the interface zone and the geological and structural materials; and λ1, λ2 and λ3 are the participation factors varying from 0 to 1. In a series of soil-structure interaction examples, Desai and his coworkers chose λ2=λ3=0 and λ1=1 and obtained satisfactory results by assigning the interface zone the same properties as the geological material. Desai et al. (1984) proposed using shear testing devices [Fig. 4.41(a)] to obtain the shear modulus of the thin-layer element. The expression used for obtaining a tangent shear modulus is given by
(4.62)
Drilled shafts in rock 138

where t is the thickness of the element [Fig. 4.41(b)] and us is the relative displacement.
Fig. 4.41 Behavior at interface: (a) schematic of direct shear test; and (b) deformation at interface.
Fishman et al. (1991) used thin-layer elements for modeling rock discontinuities. Arguing that the discontinuity interface is smooth and thus the normal deformation will be small, they chose the Young’s modulus for the thin layer elements to be 10 times higher than that of the surrounding solid rock elements. As for the shear modulus, they used the method suggested by Desai et al. (1984) as described above.
The thickness of the thin-layer element has a great effect on the quality of simulation of the interface (discontinuity) behavior. If the thickness is too large in comparison with the dimension of the surrounding elements, the thin-layer element will behave essentially as a solid element. If it is too small, computational difficulties such as numerical ill-conditioning may arise. Investigations by Desai et al. (1984) suggest that values of t/B (B is the smaller of the other two dimensions of the element) in the range 0.01≤t/B≤0.1 are likely to give good results. In applying thin-layer elements for numerical modeling jointed rock masses, Fishman et al. (1991) used thin-layer elements with t/B=0.018−0.054 and got satisfactory results.
Deformability and strength of rock 139

(d) Comments
Special joint elements have been used widely in the area of soil/rock and structure interaction. The first two classes of joint elements as discussed in (a) and (b) differ from solid elements in some fundamental ways, such as structural stiffness matrix, nature of the stress and strain vectors and the strain-displacement relations. However, thin-layer element is basically a solid element with a small thickness and a particular constitutive relationship. Investigations by Ng et al. (1997) revealed that all these joint elements have limitations, such as the problems of numerical ill-conditioning: if the joint elements have a large aspect ratio (ratio of length to thickness), small values of the coefficients in the diagonal of the stiffness matrices can create problems in the solution routine with a loss in accuracy.
It happens very often that there is filling in rock discontinuities. Since the filling itself is physically a solid, it is obviously more appropriate to use thin-layer elements than to use the first two classes of joint elements to represent them in the FEM analysis. To use thin-layer elements to represent discontinuities in the FEM analysis, appropriate mechanical properties should be assigned to them. For 2D thin-layer elements, Desai et al. (1984) proposed a procedure for determining the shear modulus and gave a general idea (no detailed procedure) of evaluating the normal deformation modulus. Since, to date, thin-layer elements have been used basically in 2D problems, no detailed suggestions about selecting the properties of 3D thin-layer element are available.
4.4 STRENGTH OF ROCK MASS
4.4.1 Empirical strength criteria for rock mass
Several empirical strength criteria for rock masses have been formulated based on large-scale testing and/or application experience and analysis. In the following, four typical empirical strength criteria are described and discussed. Since the Hoek-Brown criterion is the mostly widely used one, it is described and discussed in more details than the others.
(a) Hoek-Brown criterion
The Hoek-Brown criterion was originally published in 1980 (Hoek & Brown, 1980) and has evolved to being used under conditions which were not visualized when it was originally developed.
For intact rock, the Hoek-Brown criterion may be expressed in the following form
(4.63)
where σc is the uniaxial compressive strength of the intact rock material; σ′1 and σ′3 are respectively the major and minor effective principal stresses; and mi is a material constant for the intact rock. mi depends only upon the rock type (texture and mineralogy) as tabulated in Table 4.5.
Drilled shafts in rock 140

For jointed rock masses, the most general form of the Hoek-Brown criterion, which incorporates both the original and the modified form, is given by
(4.64)
Table 4.5 Values of parameter mi for a range of rock types (after Hoek & Brown, 1997).
Texture Rock type Class Group
Coarse Medium Fine Very fine
Conglomerate (22)
Sandstone 19
Siltstone 9
Claystone 4
Clastic Greywacke
(18)
Chalk 7
Organic Coal
(8–21)
Carbonate Breccia (20)
Sparitic Limestone
(10)
Micritic Limestone
8
Non-Clastic
Chemical Gypstone 16
Anhydrite 13
Non-foliated Marble 9
Hornfels (19)
Quartzite 24
Slightly foliated Migmatite (30)
Amphibolite 25–31
Mylonites (6)
Foliated* Gneiss 33
Schists 4–8
Phyllites (10)
Slate 9
Light
Granite 33
Granodiorite (30)
Diorite (28)
Rhyolite (16)
Dacite (17)
Andesite 19
Obsidian (19)
Dark
Gabbro 27
Norite 22
Dolerite (19)
Basalt (17)
Extrusive pyroclastic type
Agglomerate (20)
Breccia (18)
Tuff (15)
Deformability and strength of rock 141

*These values are for intact rock specimen tests normal to bedding or foliation. The value of mi will be significantly different if failure occurs along a weakness plane.
where mb is the material constant for the rock mass; and s and a are constants that depend on the characteristics of the rock mass.
The original criterion has been found to work well for most rocks of good to reasonable quality in which the rock mass strength is controlled by tightly interlocking angular rock pieces. The failure of such rock masses can be defined by setting a=0.5 in Equation (4.64), giving
(4.65)
For poor quality rock masses in which the tight interlocking has been partially destroyed by shearing or weathering, the rock mass has no tensile strength or ‘cohesion’ and specimens will fall apart without confinement. For such rock masses the following modified criterion is more appropriate and it is obtained by putting s=0 in Equation (4.64) which gives
(4.66)
Equations (4.64) to (4.66) are of no practical value unless the values of the material constants mb, s and a can be estimated in some way. Hoek and Brown (1988) proposed a set of relations between the parameters mb, s and a and the 1976 version of Bieniawski’s Rock Mass Rating (RMR), assuming completely dry conditions and a very favorable (according to RMR rating system) discontinuity orientation:
(i) disturbed rock masses
(4.67a)
(4.67b)
a=0.5 (4.67c)
(ii) undisturbed or interlocking rock masses
(4.68a)
Drilled shafts in rock 142

(4.68b)
a=0.5 (4.68c)
Equations (4.67) and (4.68) are acceptable for rock masses with RMR values of more than about 25, but they do not work for very poor rock masses since the minimum value which RMR can assume is 18 for the 1976 RMR system and 23 for the 1989 RMR system (see Chapter 2 for details). In order to overcome this limitation, Hoek (1994) and Hoek et al. (1995) introduced the Geological Strength Index (GSI). The relationships between mb, s and a and the Geological Strength Index (GSI) are as follows:
(i) For GSI>25, i.e. rock masses of good to reasonable quality
(4.69a)
(4.69b)
a=0.5 (4.69c)
(ii) For GSI<25, i.e. rock masses of very poor quality
(4.70a)
s=0 (4.70b)
(4.70c)
It is noted that the distinction between disturbed and undisturbed rock masses is dropped in evaluating the parameters mb, s and a from GSI. This is based on the fact that disturbance is generally induced by engineering activities and should be allowed by downgrading the values of GSI. The methods for determining RMR and GSI have been discussed in Chapter 2.
Since many of the numerical models and limit equilibrium analyses used in rock mechanics are expressed in terms of the Coulomb failure criterion, it is necessary to estimate an equivalent set of cohesion and friction parameters for given Hoek-Brown values. This can be done using a solution published by Balmer (1952) in which the normal and shear stresses are expressed in terms of the corresponding principal stresses as follows:
Deformability and strength of rock 143

(4.71)
(4.72)
For the GSI>25, when a=0.5:
(4.73)
For the GSI<25, when s=0:
(4.74)
Once a set of (σ′n, τ) values have been calculated from Equations (4.71) and (4.72),
average cohesion c and friction angle values can be calculated by linear regression analysis, in which the best fitting straight line is calculated for the range of (σ′n, τ) pairs. The uniaxial compressive strength of a rock mass defined by a cohesive strength c and a
friction angle is given by
(4.75)
Water has a great effect on the strength of rock masses. Many rocks show a significant strength decrease with increasing moisture content. Typically, strength losses of 30–100% occur in many rocks as a result of chemical deterioration of the cement or clay binder. Therefore, it is important to conduct laboratory tests at moisture contents which are as close as possible to those which occur in the field. A more important effect of water is the strength reduction which occurs as a result of water pressures in the pore spaces in the rock. This is why the effective not the total stresses are used in the Hoek-Brown strength criterion.
The Hoek-Brown strength criterion was originally developed for intact rock and then extended to rock masses. The process used by Hoek and Brown in deriving their strength criterion for intact rock (Equation 4.63) was one of pure trial and error (Hoek et al., 1995). Apart from the conceptual starting point provided by the Griffith theory, there is no fundamental relationship between the empirical constants included in the criterion and any physical characteristics of the rock. The justification for choosing this particular criterion (Equation 4.63) over the numerous alternatives lies in the adequacy of its predictions of the observed rock fracture behavior, and the convenience of its application
Drilled shafts in rock 144

to a range of typical engineering problems (Hoek, 1983). The material constant mi is derived based upon analyses of published triaxial test results on intact rock (Hoek, 1983; Doruk, 1991; Hoek et al., 1992). The strength criterion for rock masses is just an empirical extension of the criterion for intact rock. Since it is practically impossible to determine the material constants mb and s using triaxial tests on rock masses, empirical relations are suggested to estimate these constants from RMR or GSI. The RMR and the GSI rating systems are also empirical. For these reasons the Hoek-Brown empirical rock mass strength criterion must be used with extreme care. In discussing the limitations in the use of their strength criterion, Hoek and Brown (1988) emphasize that it is not applicable to anisotropic rocks nor to elements of rock masses that behave anisotropically by virtue of containing only a few discontinuities. Alternative empirical approaches and further developments of the Hoek-Brown criterion which seek to account for some of its limitations are given by Amadei (1988), Pan and Hudson (1988), Ramamurthy and Arora (1991), Amadei and Savage (1993), and Ramamurthy (1993).
(b) Bieniawski-Yudhbir criterion
Bieniawski (1974) proposed a strength criterion for intact rock as follows
(4.76)
This was changed by Yudhbir et al. (1983), based on tests on jointed gypsum-celite specimens, to the form
(4.77)
to fit rock masses. Yudhbir et al. (1983) recommended that the parameters α and a be determined from
α=0.65 (4.78a)
(4.78b)
where Q is the classification index of Barton et al. (1974) and RMR is Bieniawski’s 1976 Rock Mass Rating (Bieniawski, 1976). Parameter b is determined from Table 4.6.
Kalamaras and Bieniawski (1993) suggested that both a and b should be varied with RMR for better results. They proposed the criterion of Table 4.7 specifically for coal seams.
Deformability and strength of rock 145

(c) Johnston criterion
Based on experimental data of a wide range of geotechnical material, from lightly overconsolidated clays through hard rocks, Johnston (1985) proposes the following strength criterion
(4.79)
where σ′1n and σ′3n are the normalized effective principal stresses at failure, obtained by dividing the effective principal stresses, σ′1 and σ′3, by the relevant uniaxial compressive strength, σc; B and M are intact material constants; and s is a constant to account for the strength of discontinuous soil and rock masses in a manner similar to that proposed by Hoek and Brown (1980). However, in the development of the criterion, Johnston (1985) considers only intact materials.
Table 4.6 Parameter b in the Bieniawski-Yudhbir criterion (Yudhbir et al., 1983).
Rock Type b
Tuff, Shale, Limestone 2
Siltstone, mudstone 3
Quartzite, Sandstone, Dolerite 4
Norite, Granite, Quartz diorite, Chert 5
Table 4.7 Rock mass criterion for coal seams by Kalamaras and Bieniawski (1993).
Equation Parameters
For intact material, s=1, the criterion becomes
(4.80)
Drilled shafts in rock 146

By placing σ′3n=0, the uniaxial compressive strength is correctly modeled with the righthand side of Equation (4.80) becoming unity.
By putting B=1, the criterion simplifies to
(4.81)
which for
(4.82)
is identical to the normalized Coulomb criterion. The parameter B, which describes the nonlinearity of a failure envelope, is essentially
independent of the material type, and is a function of uniaxial compressive strength: B=1−0.0172(logσc)2
(4.83)
The parameter M, which describes the slope of a failure envelope at σ′3n=0, is found to be a function of both the uniaxial compressive strength and the material type. For the material types shown in Table 4.8, M can be estimated by (no result is obtained for type D material because of lack of data):
Type A, M=2.065+0.170(logσc)2 (4.84a)
Type B, M=2.065+0.231(logσc)2 (4.84b)
Type C, M=2.065+0.270(logσc)2 (4.84c)
Type E, M=2.065+0.659(logσc)2 (4.84d)
Deformability and strength of rock 147

Table 4.8 A range of rock types (after Hoek & Brown, 1980).
Type General Rock Type Examples
A Carbonate rocks with well developed crystal cleavage
Dolomite, limestone, marble
B Lithified argillaceous rocks Mudstone, siltstone, shale, slate
C Arenaceous rocks with strong crystals and poorlydeveloped crystal cleavage
Sandstone, quartzite
D Fine grained polyminerallic igneous crystalline rocks
Andesite, dolerite, diabase, rhyolite
E Coarse grained polyminerallic igneous and metamorphic crystalline rocks
Amphibolite, gabbro, gneiss, granite, norite, quartz diorite
(d) Ramamurthy criterion
Ramamurthy and his coworkers (Ramamurthy et al., 1985; Ramamurthy, 1986; Ramamurthy, 1993) modified the Coulomb theory to represent the nonlinear shear strength behavior of rocks.
For intact rock, the strength criterion is in the following form
(4.85)
where σ′1 and σ′3 are the major and minor principal effective stresses; σc is the uniaxial compressive strength; αr is the slope of the curve between (σ′1−σ′3)/σ′3 and σc/σ′3, for most intact rocks the mean value of αr is 0.8; and Br is a material constant of intact rock, equal to (σ′1−σ′3)/σ′3 when σc/σ′3=1. The values of Br vary from 1.8 to 3.0 depending on the type of rock (Table 4.9).
The values of αr and Br can be estimated by conducting a minimum of two triaxial tests at confining pressures greater than 5% of σc for the rock. The above expression is applicable in the ductile region and in most of the brittle region. It underestimates the strength when σ′3 is less than 5% of σc and also ignores the tensile strength of the rock. To account for the tensile strength, the following expression gives a better prediction for intact rock
(4.86)
where σt is the tensile strength of rock preferably obtained from Brazilian tests; α=0.67 for most rocks; and B is a material constant. The values of α and B in Equation (4.86) can be obtained by two triaxial tests conducted at convenient confining pressures greater than
Drilled shafts in rock 148

5% of σc for the rock. In the absence of these tests, the value of B is estimated as 1.3(σc/σt)1/3.
For rock masses, the strength criterion has the same form as for intact rock, i.e.
(4.87)
Table 4.9 Mean values of parameter Br for different rocks (after Ramamurthy, 1993).
Metamorphic and sedimentary rocks Rock type Argillaceous Arenaceous Chemical Igneous rocks
Siltstone Shales Sandstone Quartzite Limestone Marble Andesite Granite
Clays Slates Anhydrite Dolomite Diorite Charnockite
Tuffs Mudstone Rock salt Norite
Loess Claystone Liparite
Basalt
Br 1.8 2.2 2.2 2.6 2.4 2.8 2.6 3.0
Mean value
2.0 2.4 2.6 2.8
where σcm is the rock mass strength in unconfined compression; Bm is a material constant for rock mass; and αm is the slope of the plot between (σ′1−σ′3)/σ′3 and σcm/σ′3, which can be assumed to be 0.8 for rock masses as well. σcm and Bm can be obtained by
(4.88)
(4.89)
in which σc is the unconfined compressive strength of intact rock strength; and Br is a material constant for intact rock, as in Equation (4.83).
(e) Comments
In addition to the four empirical strength criteria for rock masses described above, there are many other criteria. All these criteria are purely empirical and thus it is impossible to say which one is correct or which one is not. However, the Hoek-Brown strength criterion is the most representative one of the empirical strength criteria for rock masses, because it is the mostly widely referred and used. Since its advent in 1980, considerable application experience has been gained by its authors as well as by others. As a result,
Deformability and strength of rock 149

this criterion has been modified several times to meet the needs of users who have applied it to conditions which were not visualized when it was originally developed.
It is noted that all the empirical strength criteria for rock masses have the following limitations:
1. The influence of the intermediate principal stress, which in some cases is important, is not considered.
2. The criteria are not applicable to anisotropic rock masses. So they can be used only when the rock masses are approximately isotropic, i.e. when the discontinuity orientation does not have a dominant effect on failure.
4.4.2 Equivalent continuum approach for estimating rock mass strength
(a) Model of Jaeger (1960) and Jaeger and Cook (1979)
Figure 4.42(a) shows a cylindrical rock mass specimen subjected to an axial major principal stress σ′1 and a lateral minor principal stress σ′3. The rock mass is cut by well-defined parallel discontinuities inclined at an angle β to the major principal stress σ′1. The strength of both the intact rock and the discontinuities are described by the Coulomb criterion, i.e.
(4.90)
(4.91)
where τr and τj are respectively the shear strength of the intact rock and the
discontinuities; cr and are respectively the cohesion and internal friction angle of the
intact rock; cj and are respectively the cohesion and internal friction angle of the discontinuities; and σ′n is the effective normal stress on the shear plane.
For the applied stresses on the rock mass cylinder, the effective normal stress σ′n and the shear stress τ on a plane which makes an angle β′ to the σ′1 axis are respectively given by
(4.92)
(4.93)
If shear failure occurs on the discontinuity plane, the effective normal stress σ′n and the shear stress τ on the discontinuity plane can be obtained by replacing β′ in Equations (4.92) and (4.93) by β. Adopting the obtained stresses on the discontinuity plane to substitute for σ′n and τj in Equation (4.91) and then rearranging, we can obtain the effective major principal stress required to cause shear failure along the discontinuity as follows
Drilled shafts in rock 150

(4.94)
If shear failure occurs in the intact rock, the minimum effective major principal stress can be obtained by
(4.95)
The model of Jaeger (1960) and Jaeger and Cook (1979) assumes that failure during compressive loading of a rock mass cylinder subject to a lateral stress σ′3 [see Fig. 4.42(a)] will occur when σ′1 exceeds the smaller of the σ′1f values given by Equations (4.94) and (4.95). Figure 4.42(b) shows the variation of σ′1f with β, from which we can clearly see the anisotropy of the rock mass strength caused by the discontinuities.
(b) Model of Amadei (1988) and Amadei and Savage (1989, 1993)
As seen above, the model of Jaeger (1960) and Jaeger and Cook (1979) assumes that the jointed rock mass is under axisymmetric loading, so the effect of the intermediate principal stress is not involved in their formulations. To address the limitation of the model of Jaeger (1960) and Jaeger and Cook (1979), Amadei (1988) and Amadei and Savage (1989, 1993) derived solutions for the strength of a jointed rock mass under a variety of multiaxial states of stress. As in the model of Jaeger (1960) and Jaeger and Cook (1979), the modeled rock mass is cut by a single discontinuity set. In the formulations of Amadei (1988) and Amadei and Savage (1989, 1993), however, the intact rock strength is described by the HoekBrown strength criterion and the discontinuity strength is modeled using a Coulomb criterion with a zero tensile strength cut-off.
The principle used by Amadei (1988) and Amadei and Savage (1989, 1993) to derive the expressions of the jointed rock mass strength is the same as that used by Jaeger (1960) and Jaeger and Cook (1979). However, since the effect of the intermediate principal stress is included and since the nonlinear Hoek-Brown strength criterion is used, the derivation process and the final results are much more complicated. For reasons of space, only some of the typical results of Amadei and Savage (1989, 1993) are shown here.
Consider a jointed rock mass cube under a triaxial state of stress σ′x, σ′y and σ′z. The orientation of the discontinuity plane is defined by two angles β and Ψ with respect to the xyz coordinate system (see Fig. 4.43). Let nst be another coordinate system attached to the discontinuity plane such that the n-axis is along the discontinuity upward normal and the s-and t-axes are in the discontinuity plane. The t-axis is in the xz plane. The upward unit vector n has direction cosines
Deformability and strength of rock 151

Fig. 4.42 Variation of compressive strength with angle β of the discontinuity plane (after Jaeger & Cook, 1979).
Drilled shafts in rock 152

(4.96)
Defining m=σ′y/σ′x and n=σ′z/σ′x and introducing two functions
(4.97)
where σ′n and τ are respectively the normal and shear stresses acting across the
discontinuity; and is the friction angle of the discontinuity, the limiting equilibrium (incipient slip) condition of the discontinuity can be derived as
(4.98)
The nonnegative normal stress condition of the discontinuity is
(4.99)
So for a discontinuity with orientation angles β and ψ the condition Ff=0 corresponds to impending slip. No slip takes place when Ff is negative. Figure 4.44 shows a typical set of failure surfaces Ff(m,n)=Q for ψ equal to 40° or 80° and β ranging between 0° and 90°. In this figure the ranges Ff(m,n)>0 are shaded and Fn=0 is represented as a dashed straight line. The positive normal stress condition (Fn>0) is shown as the region on either side of the line Fn=0 depending on the sign of σx.
Deformability and strength of rock 153

Fig. 4.43 Discontinuity plane in a triaxial stress field (after Amadei & Savage, 1993).
Depending on the ordering of σ′x, σ′y and σ′z, the Hoek-Brown strength criterion for intact rock (Equation 4.63) assume six possible forms as shown in Table 4.10. Using mi=
Drilled shafts in rock 154

Table 4.10 Forms of Equation (4.63) for different orderings of σ′x, σ′y and σ′z.
Principal stress ordering
Major stress σ′1
Minor stress σ′3
Forms of Equation (4.63)
σ′x>σ′y>σ′z σ′x σ′z
σ′x>σ′z>σ′y σ′x σ′y
σ′y>σ′x>σ′z σ′y σ′z
σ′y>σ′z>σ′x σ′y σ′x
σ′z>σ′x>σ′y σ′z σ′y
σ′z>σ′y>σ′x σ′z σ′x
Deformability and strength of rock 155

Fig. 4.44 Shape of the failure surface Ff(m,n)=0 in the m=σ′y/σ′x, n=σ′z/σ′x space for (a) β= 38.935°, ψ=40°; (b) β=30°, ψ=40°; (c) β=20°, ψ=80°; and (d) β=70°, ψ=40°. The region Fn >0 is above the dashed line Fn=0 when σ′x is compressive and below that line when σ′x is tensile. Friction (after Amadei & Savage, 1993).
Drilled shafts in rock 156

7 and σc=42 MPa, the intact rock failure surfaces for different values of σ′x/σc can be obtained as shown in Figure 4.45.
The failure surfaces of the jointed rock masses can be obtained by superposition of the discontinuity failure surfaces and the intact rock failure surfaces. Figure 4.46 is obtained by superposition of the failure surfaces in Figures 4.44 and 4.45. The following remarks can be made about the diagrams shown in Figure 4.46:
1. In general, for a given value of σ′x/σc, the size of the stable domain enclosed by the intact rock failure surface is reduced because of the discontinuities. The symmetry of the intact rock failure surface with respect to the m=n axis in the m, n space (Fig. 4. 46) is lost. The strength of the jointed rock mass is clearly anisotropic.
2. The strength reduction associated with the discontinuities is more pronounced for discontinuities with orientation angles β and ψ for which the discontinuity failure surface in the m, n space is ellipse than when it is an hyperbola or a parabola.
3. Despite the zero discontinuity tensile strength and the strength reduction associated with the discontinuities, jointed rock masses can be stable under a wide variety of states of stress σ′x, σ′y=mσ′x, σ′z=nσ′x. These states of stress depend on the values of discontinuity orientation angles β and ψ and the stress ratio σ′x/σc.
(c) Comments
In Section (a), a rock mass with one discontinuity set is considered. If we apply the model of Jaeger (1960) and Jaeger and Cook (1979) to a rock mass with several discontinuity sets, the strength of the rock mass can be obtained by considering the effect of each discontinuity set. For example, consider a simple case of two discontinuity sets A and B [see Fig. 4.47(a)], the angle between them being α. The corresponding variation of the compressive strength σ′1β, if the two discontinuity sets are present singly, is shown in Figure 4.47(b). As the angle βa of discontinuity set A is changed from 0 to 90°, the angle βb of discontinuity set B with the major stress direction will be
βb=|α−βa| for α≤90° (4.100)
When βa is varied from 0 to 90°, the resultant strength variation for α=60 and 90° will be as in Figure 4.47(c), choosing the minimum of the two values σ′1βa and the corresponding σ′1βb from the curves in Figure 4.47(b).
Hoek and Brown (1980) have shown that with three or more discontinuity sets, all sets having identical strength characteristics, the rock mass will exhibit an almost flat strength variation (see Fig. 4.48), concluding that in highly jointed rock masses, it is possible to adopt one of the rock mass failure criteria presented in Section 4.4.1.
It should be noted that, in the models of the equivalent continuum approach, discontinuities are assumed to be persistent and all discontinuities in one set have the same orientation. In reality, however, discontinuities are usually non-persistent and the discontinuities in one set have orientation distributions.
Deformability and strength of rock 157

Fig. 4.45 Geometrical representation of the Hoek-Brown failure surface for intact rock in the m= σ′y/σ′x, n=σ′z/σ′x space for different values of σ′x/σc with mi=7 and σc=42 MPa. (a) σ′x is compressive; and (b) σ′x is tensile (after Amadei & Savage, 1993).
Drilled shafts in rock 158

Fig. 4.46 Superposition of the joint failure surface with and the intact rock failure surface with mi=7 and σc=42 MPa in the m=σ′y/σ′x, n=σ′z/σ′x space for (a) β=38.935°, ψ=40°; (b) β= 30°, ψ=40°; (c) β=20°, ψ=80°; and (d) β=70°, ψ=40° (after Amadei & Savage, 1993).
Deformability and strength of rock 159

4.4.3 Direct consideration of discontinuities in numerical analysis
The effect of discontinuities on the rock mass strength can be directly accounted for in numerical analyses. Special joint elements used to represent the discontinuities in FEM analysis have been discussed in Section 4.3.3. Here only the constitutive models of discontinuities will be described and discussed.
To account for the effect of discontinuities on the rock mass strength in numerical analysis, the behavior of discontinuities is usually assumed to be elasto-plastic. The elastic behavior is represented by the initial elastic tangential normal and shear stiffnesses kn
e and kse (see Fig. 4.1). The peak strength and dilatancy of rock discontinuities is
represented by a failure criterion and a flow rule, respectively.
(a) Coulomb Model
The Coulomb model is perhaps the crudest of rock discontinuity models but has been extensively used in engineering analysis and design of rock structures. The Coulomb strength criterion has been given in Equation (4.8) and is rewritten here in the following form
(4.101)
where |σs| is the absolute value of shear stress on the discontinuity plane; cj and are respectively the cohesion and friction angle of the discontinuities; and σ′n is the effective normal stress on the discontinuity plane.
If an associated flow rule is adopted, rates of plastic normal strain and shear strain
are given by
(4.102)
where is a positive proportionality constant. Equation (4.102) implies
(4.103)
Drilled shafts in rock 160

Fig. 4.47 (a) Rock mass with two discontinuity sets A and B; (b) Strength variation with β if the discontinuity sets are present singly; and (c) Strength variation when both discontinuity sets are present.
Deformability and strength of rock 161

Fig. 4.48 Strength variation with angle β1 of discontinuity plane 1 in the presence of 4 discontinuity sets, the angle between two adjoining planes being 45° (after Hoek & Brown, 1980).
Drilled shafts in rock 162

The discontinuities are, therefore, dilatant, i.e. an increment of shear displacement ∆us along the discontinuity is accompanied by an increment in the normal displacement ∆un given by
(4.104)
The rate of dilation is constant and goes on unabated. This behavior is quite unrealistic. Roberds and Einstein (1978) presented a very comprehensive model for rock
discontinuities. From various studies it has been established that the flow rule for rock discontinuities should be non-associated. By introducing a variable dilation angle Ψj, a plastic potential function can be written as
(4.105)
where Ψj can be identified from the experimental results on rock discontinuities. It is clear that when the average normal displacement on the rock discontinuity is equal to the average height of the asperities, dilation must cease, i.e. Ψj→0.
The Coulomb model has another drawback. cj and in Equation (4.101) are not truly constants. They depend on σ′n. The values of σ′n on rock discontinuities can vary by several orders of magnitudes within the structure to be analyzed. Choosing a single
appropriate value of cj and for a discontinuity set, therefore, becomes difficult, if not impossible.
(b) Barton Model
The Barton model has been described in Section 4.2.2 [Equation (4.12)] and is rewritten here in the following form
(4.106)
where JRC is the discontinuity roughness coefficient; JCS is the discontinuity wall
compressive strength; and is the basic friction angle of the rock material. If an associated flow rule is assumed, the dilation angle at peak strength can be readily
computed by differentiating Equation (4.106). However, the computed dilation angles Ψj based on an associated flow rule do not match the experimentally observed values. This again shows that the flow rule for rock discontinuities should be non-associated. Pande and Xiong (1982) proposed the following plastic potential function to match the experimental results of Barton and Chaubey (1977):
(4.107)
Deformability and strength of rock 163

where
(4.108)
Table 4.11 shows the comparison of experimental values with those computed using Equation (4.107) as the plastic potential function. A close agreement can be seen.
(c) Comments
In addition to the two elasto-plastic models for rock discontinuities described above, there are many other models. Roberds and Einstein (1978) presented a very comprehensive model and critically examined Patton (1966) model, Ladanyi and Archambault (1970) model, Agbabian model (Ghaboussi et al., 1973), Goodman (1966, 1974) model and Barton (1976) model by comparing them with the comprehensive model. Since the comprehensive rock discontinuity model of Roberds and Einstein (1978) can treat the entire behavioral history from the creation of the discontinuity to its behavior before, during and after sliding, it provides a good basis for comparison of various models. With the comprehensive rock discontinuity model, it is possible to show where and to what extent the existing models are limited or simplified as compared to the comprehensive model and this makes it possible to appropriately modify the existing models, if so desired.
Table 4.11 Comparison of measured angle of dilation with that predicted by Equation (4.107).
Rock Type No. of Samples
Measured angle of dilation (°)
Computed angle of dilation (°)
Alpite 36 25.5 23.0
Granite 38 20.9 20.2
Hornfels 17 26.5 26.2
Calcareous shale
11 14.8 19.1
Slate 7 6.8 –
Gneiss 17 17.3 15.5
Soapstone model
5 16.2 18.6
Fractures 130 13.2 –
Drilled shafts in rock 164

4.5 SCALE EFFECT
Research results (see, e.g., Heuze, 1980; Hoek & Brown, 1980; Medhurst & Brown, 1996) indicate that rock masses show strong scale dependent mechanical properties. In the following, the scale effect on the strength and deformation properties of rock masses is briefly discussed.
4.5.1 Scale effect on strength of rock mass
Experimental results show that rock strength decreases significantly with increasing sample size. Based upon an analysis of published data, Hoek and Brown (1980) suggested that the unconfined compressive strength σcd of a rock specimen with a diameter of d mm is related to the unconfined compressive strength σc50 of a 50 mm diameter specimen by
(4.109)
This relationship, together with the data upon which it was based, is illustrated in Figure 4.49. Hoek and Brown (1997) suggested that the reduction in strength is due to the greater opportunity for failure through and around grains, the “building blocks” of intact rock, as more and more of these grains are included in the test sample. Eventually, when a sufficiently large number of grains are included in the sample, the strength reaches a constant value.
Medhurst and Brown (1996) reported the results of laboratory triaxial tests on 61, 101, 146 and 300 mm diameter samples of coal from the Moura mine in Australia. The results of these tests are as summarized in Table 4.12 and Figure 4.50. It can be seen that the strength decreases significantly with increasing specimen size. This is attributed to the effects of cleat spacing. For this coal, the persistent cleats are spaced at 0.3–1.0 m while non-persistent cleats within vitrain bands and individual lithotypes define blocks of 1 cm or less. This cleating results in a “critical” sample size of about 1m above which the strength remains constant.
Heuze (1980) conducted an extensive literature search and found results of 77 plate tests as shown in Figure 4.51. The test volume shown in this figure is calculated in the following way:
1. For a circular plate, the test volume is taken as that of a sphere having a diameter of 4 times the diameter of the plate.
2. For a rectangular or square plate of given area, the diameter of a circle of equal area is first calculated, and the test volume is then determined using the equivalent diameter.
Deformability and strength of rock 165

Fig. 4.49 Influence of specimen size on the strength of intact rock (after Hoek & Brown, 1980).
Table 4.12 Peak strength of Moura coal in terms of the parameters in Equation (4.64), based upon a value of σc=32.7 Mpa.
Diameter (mm) mb s a
61 19.4 1.0 0.5
101 13.3 0.555 0.5
146 10.0 0.236 0.5
300 5.7 0.184 0.6
Mass 2.6 0.052 0.65
Drilled shafts in rock 166

Fig. 4.50 Peak strength for Australian Moura coal (after Medhurst & Brown, 1996).
The number shown next to the open triangles in the figure indicates the number of tests performed; the mean value of these test results is plotted as the triangle. The test results [except those of Coates and Gyenge (1966) and Rhodes (1973)] show that the strength decreases with increasing test volume.
Figure 4.52 (Hoek et al., 1995) shows a simplified representation of the influence of the relation between the discontinuity spacing and the size of the problem domain on the
Deformability and strength of rock 167

selection of a rock mass behavior model (Hoek-Brown strength criterion). As the problem domain enlarges, the corresponding rock behavior changes from that of the isotropic intact rock, through that of a highly anisotropic rock mass in which failure is controlled by one or two discontinuities, to that an isotropic heavily jointed rock mass.
In determining the allowable bearing capacity of shallow foundations on rock using the Hoek-Brown strength criterion, Serrano and Olalla (1996), following the technique of Hoek (1983), divide the rock masses into three main structural groups depending on the conditions of rock masses and the foundation dimensions (Fig. 4.53):
Fig. 4.51 Effect of test volume on measured bearing strength of rock masses. The number next to the triangle indicates the number of tests performed (after Heuze, 1980).
Drilled shafts in rock 168

Fig. 4.52 Simplified representation of the influence of scale on the type of rock mass behavior (after Hoeketal, 1995).
Group I: where the rock can be considered as intact. If the microstructure of the rock is isotropic, the rock mass can be considered isotropic and the Hoek-Brown criterion can be applied.
Group II: where the rock mass is affected by only a few sets of discontinuities. The behavior of the rock mass is basically anisotropic and the Hoek-Brown criterion cannot generally be applied to the rock mass.
Deformability and strength of rock 169

Fig. 4.53 Simplified representation of scale effect on the type of rock mass model which should be used in designing shallow foundations on rock slope (after Serrano & Olalla, 1996).
Group III: where the rock mass is affected by a number of sets of discontinuities giving rise to “small spacing” between discontinuities. This group of rock masses can be regarded as isotropically broken media and the Hoek-Brown criterion can be applied.
“Small spacing” is a relative concept, in the sense that it depends on the foundation dimensions. Serrano and Olalla (1996) propose a parameter, the “spacing ratio of a foundation” (SR), for its quantification. SR is defined as
(4.110)
Drilled shafts in rock 170

where B is the foundation width (in meters); smi is the discontinuity spacing of set i (in meters); λi is the frequency of discontinuity set i (m−1); and n is the number of discontinuity sets.
As an initial and conservative proposal, a “relatively small spacing” is suggested when SR is greater than 60. A value of 60 means that, if there are four sets of discontinuities, each of them appears at least 15 times within the foundation width. When SR>60, the mass can be regarded as an isotropically broken medium and the Hoek-Brown criterion can be applied.
For values of SR≤(0.8−4), in the case of four sets of discontinuities, the rock mass can be considered as an intact rock mass (Group I).
4.5.2 Scale effect on deformability of rock mass
The scale effect on the deformability of rock masses can be seen from the difference of rock mass modulus measured in the field and intact rock mass modulus measured in the laboratory. Heuze (1980) concluded that the rock mass modulus measured in the field ranges between 20 and 60% of the intact rock mass modulus measured in the laboratory. One simple and apparent explanation to the reduction of rock mass modulus is that the effect of discontinuities is included in the rock masses.
4.6 DISCUSSION
The structure of jointed rock masses is highly variable; the methods used to consider the effect of discontinuities on the mechanical behavior of jointed rock masses are also variable. The selection of the methods should be based on careful studies of the in situ situation of jointed rock masses.
Laboratory and in situ tests (i.e., direct methods) can directly provide results about the mechanical properties of tested specimens. However, care need be exercised about the extent to which the measured behavior of the rock specimen reflects the actual behavior of rock masses. The extrapolation of the behavior induced by the experimental system to different circumstances can be very misleading. In addition, in situ tests are time consuming, expensive and difficult to conduct; it is extremely difficult to investigate the effects of discontinuity system on the mechanical properties of jointed rock masses through in situ tests.
Indirect methods consist of the empirical methods, the equivalent continuum approach and numerical analysis methods. It is important to note that all the indirect methods need to use some of the mechanical properties of intact rock or discontinuities obtained through laboratory or in situ tests.
Since they are simple and easy to use, and most importantly, since they originate from practical experience, the empirical methods are most widely used in design practice. However, it is important to note their limitations as described in Sections 4.3.1 and 4.4.1.
The equivalent continuum approach usually assumes that all discontinuities are persistent and the discontinuities in one set have the same orientation. In reality, however, discontinuities are usually non-persistent and the discontinuities in one set are not in the same orientation. Kulatilake et al. (1992, 1993) and Wang (1992) considered rock masses
Deformability and strength of rock 171

containing non-persistent discontinuities and derived relationships between the deformation properties and the fracture tensor parameters from the DEM analysis results of generated rock mass blocks. However, this method is also limited as described in Section 4.3.2.
The numerical methods have great potential for the complex mechanical analyses of jointed rock masses. The key problems associated with numerical methods are the representation of discontinuities and the determination of discontinuity constitutive models. The main drawback of this approach is that, due to computer limitations and difficulty in creating meshes for a heavily jointed rock mass, only rock masses with a limited number of discontinuities can be analyzed.
In summary, the limitations for each method are as follows:
1. For laboratory tests, only small specimens can be used. Since rock masses show strong scale dependent mechanical properties, the measured behavior of small rock specimens may not reflect the actual behavior of rock masses in the field.
2. In situ tests are time consuming, expensive and difficult to conduct. 3. Empirical methods do not consider the anisotropy of rock masses caused by
discontinuities and different empirical relations often give very different values. 4. The equivalent continuum approach assumes that the discontinuities are persistent and
the discontinuities in one set have the same orientation. In reality, however, most of the discontinuities are non-persistent with finite size and the discontinuities in one set are not in the same orientation.
5. Numerical methods can only be used for rock masses with a limited number of discontinuities.
Because each method has its own advantages and disadvantages, it is important to select the appropriate method(s) for different purposes. Following are the principles that can be used when selecting the methods according to the nature of the problems:
1. The empirical methods can always be used in the first stage of design. For heavily jointed rock masses, the empirical methods can be used in all design stages.
2. For rock masses with persistent discontinuities which are regularly distributed, the equivalent continuum approach can be used.
3. For rock masses with a limited number of discontinuities, the numerical methods and the limit equilibrium method can be used.
Drilled shafts in rock 172

5 Site investigation and rock testing
5.1 INTRODUCTION
As required for any geotechnical projects, site investigations need be conducted to obtain the information required for the design of drilled shafts in rock. The nature and extent of the information to be obtained from a site investigation will vary according to the project involved and the expected ground conditions. A site investigation is a process of progressive discovery, and, although there must be a plan and program of work at the beginning, the information emerging at any stage will influence the requirements of subsequent stages. Typically, a site investigation consists of the following three main stages:
1. Preliminary investigation including desk study and site reconnaissance 2. Detailed investigation including boring, drilling, in situ testing and lab testing 3. Review during construction and monitoring
A distinguishing feature of site investigations for foundations in rock is that it is particularly important to focus on the details of the structural geology. The rock mass at a site may contain very strong intact rock, but the discontinuities in the rock mass may lead to excessive deformation or even failure of the drilled shaft foundations in the rock mass.
5.1.1 Preliminary investigation
Prior to implementing a detailed site investigation program, certain types of preliminary information need be developed. The type and extent of information depends on the cost and complexity of the project. The information is developed from a thorough survey of existing information and field reconnaissance. Information on topography, geology and potential geologic hazards, surface and groundwater hydrology, seismology, and rock mass characteristics are reviewed to determine the following (ASCE, 1996):
• Adequacy of available data • Type and extent of additional data that will be needed • The need for initiating critical long-term studies, such as ground water and seismicity
studies, that require advance planning and early action • Possible locations and type of geologic features that might control the design and
construction of drilled shaft foundations.
Various types of published maps can provide an excellent source of geologic information to develop the regional geology and geological models of potential or final sites. Other geotechnical information and data pertinent to the project can frequently be obtained from a careful search of federal, state, or local governments as well as private industry in

the vicinity. Consultation with private geotechnical engineering firms, mining companies, well drilling and development companies and state and private university staff can sometimes provide a wealth of information.
After a complete review of available geotechnical data, a site reconnaissance should be made to gather information through visual examination of the site and an inspection of ground exposures in the vicinity. In some cases adjacent sites will also be examined. The primary objective of this field reconnaissance is to, insofar as possible, confirm, correct or expand geologic and hydrologic information collected from preliminary office studies. If rock outcrops are present, the field reconnaissance offers an opportunity to collect preliminary information on rock mass conditions that might influence the design and construction of drilled shafts. Notation should be made of the strike and dip of major discontinuity sets, discontinuity spacing, discontinuity conditions (i.e. weathering, wall roughness, tightness, fillings, and shear zones), and discontinuity persistence.
The reconnaissance will assist in planning the detailed investigation program. Where the geology is relatively straightforward and the engineering problems are not complex, sufficient geological information may be provided by the desk study, subject to confirmation by the exploration which follows. In other cases detailed investigations may be carried out.
Geophysical survey is becoming quicker and more robust to provide information on the depth of weathering, the bedrock profile, the location of major faults and solution cavities, and the degree of fracturing of the rock. So some geophysical work is often conducted in the stage of preliminary investigation rather than leaving it all to the stage of detailed investigation. In some cases it may be appropriate to put down pits or use relatively light and simple boring equipment during the preliminary investigation. However, the objectives of a boring program at this stage should be limited. The main boring program should be deferred until the stage of detailed investigation.
5.1.2 Detailed investigation
Information from the desk study and site reconnaissance provides a preliminary conception of the ground conditions and the engineering problems that may be involved. Detailed investigation then proceeds with flexible planning so that the work can be varied as necessary as fresh information emerges. The extent of the detailed investigation will be governed by the type of project and the nature and variation of the ground. Other factors to be taken into account are access, time available and cost. However, technical requirements rather than cost should govern.
Various methods are available for detailed investigation of rock masses. This chapter will describe discontinuity sampling on exposed rock faces (Section 5.2), boring (Section 5.3), geophysical exploration (Section 5.4), lab testing (Section 5.5) and in situ testing (Section 5.6).
5.7.3 Review during construction and monitoring
It is essential to examine all excavations during construction to see whether the expectations of the preceding investigations have been realized. The examinations can be carried out after the excavation has been cleaned up and just prior to the placement of
Drilled shafts in rock 174

concrete. The identification of exceptions may lead to an early diagnosis and anticipation of problems.
During construction and in the post-commissioning stage, monitoring will involve regular reading of instruments installed to check performance against design criteria. This should serve as an “early warning” system, which will initiate a contingency program, thus minimizing the delays that would occur as a result of an adverse situation.
5.2 DISCONTINUITY SAMPLING ON EXPOSED ROCK FACES
From sampling on exposed rock faces, either above or below ground, information about the orientation, spacing, roughness and curvature of discontinuities can usually be satisfactorily obtained. It should be noted, however, that there exists sampling bias on discontinuity orientation and spacing (Terzaghi, 1965; Priest, 1993; Mauldon & Mauldon, 1997). This sampling bias should be corrected before inferring statistical distributions of orientation data. Although the locations of traces give some information about the locations of discontinuities, it is still impossible to determine the exact locations of discontinuities. From sampling on exposed rock faces, almost no information about the shape of discontinuities can be obtained. Measured trace lengths give some information about the size of discontinuities. However, because of the sampling biases and the unknown shape of discontinuities, the size of discontinuities can only be inferred based on assumptions (see Chapter 3).
5.2.1 Scanline sampling
Intersections between discontinuities and the rock face produce linear traces which provide an essentially two-dimensional sample of the discontinuity network. In current geologic and rock engineering practice, straight scanlines are commonly used for discontinuity sampling on exposed rock faces (see Fig. 5.1). The straight scanlines can be simply measuring tapes pinned with masonry nails and wire to the rock face or chalk lines drawn on the rock face. The length and orientation of each discontinuity crossing the straight scanline are measured. Spacing between adjacent discontinuities intersecting the straight scanline can also be measured along the scanline. From measurements taken this way, three inferences can be made on the population of discontinuities: intensity (or spacing), size (length or persistence), and orientation.
Straight scanlines provide a fast method for discontinuity sampling, but yield a sample biased by the relative orientation and size between the discontinuities and the rock face. The relative orientation introduces a bias to both the discontinuity spacing and the number of discontinuities that are measured. The bias arises because discontinuities sub-parallel to the rock face have less chance to intersect the rock face than discontinuities perpendicular to the rock face (Terzaghi, 1965). The bias in spacing can be corrected as follows (Terzahgi, 1965):
s=sa sinθ (5.1)
Site investigation and rock testing 175

where s is the true spacing between discontinuities of the same set; sa is the measured (apparent) spacing between discontinuities of the same set on the rock face; and θ is the angle between the scanline and the discontinuity traces (see Fig. 5.1).
The number of discontinuities in a set can be adjusted to account for the orientation bias as follows:
(5.2)
where N is the adjusted number of discontinuities; Na is the measured (apparent) number of discontinuities.
The statistical analysis of discontinuity spacing and frequency has been discussed in Chapter 3.
Fig. 5.1 Straight scanline sampling.
There is also sampling bias for trace lengths intersected by a straight scanline because the scanline tends to intersect preferentially the longer traces (Priest & Hudson, 1981). For detailed analysis of sampling biases on trace lengths, the reader can refer to Priest (1993).
Circular scanlines (see Fig. 5.2) are also used for discontinuity sampling at exposed rock faces (Einstein et al., 1979; Titley et al., 1986; Davis & Reynolds, 1996; Mauldon et al., 2000). Circular scanline sampling measures only the traces intersecting the line of the circle. One advantage of circular scanlines over straight scanlines is the elimination of directional bias. Mauldon et al. (2000) derived a simple expression for estimating discontinuity intensity from circular scanline sampling:
(5.3)
Drilled shafts in rock 176

where λ′ is the discontinuity intensity defined as the mean length of traces per unit area; N is the number of traces intersecting the circular scanline; and c is the radius of the scanline circle.
Fig. 5.2 Circular scanline sampling.
5.2.2 Window sampling
Window or area sampling measures discontinuity traces within a finite size area (usually rectangular or circular in shape as discussed in Chapter 3) at an exposed rock face (see Figs. 3.22 and 3.23). It is important to note that in window sampling as it is defined here only the portions of the discontinuity traces within the window are measured, while the portions of traces intersecting such a window but lying outside are not considered. Window sampling reduces the sampling biases for orientation and size created by scanline sampling, but problems of discontinuity curtailment remain where the rock face is of limited extent.
The estimation of mean trace length from sampling on rectangular or circular windows has been described in Chapter 3.
The probability of intersecting a discontinuity with a sampling domain depends on the relative orientation of the discontinuity with respect to the sampling domain, the shape and size of the discontinuity, and the shape and size of the sampling domain. Therefore, observed frequencies of discontinuities do not represent the true frequencies in three dimensions. This is called the sampling bias on discontinuity orientation. This sampling bias should be corrected when inferring statistical distributions of orientation data. Kulatilake and Wu (1984a) proposed a method to find the probability that a finite size discontinuity intersects a finite size sampling plane, and presented a procedure for correcting sampling bias for circular discontinuities intersecting rectangular, vertical
Site investigation and rock testing 177

sampling planes. Kulatilake et al. (1990) extended the previous formulation to cover other discontinuity shapes such as parallelograms, rectangles, rhombuses and triangles. However, the procedures for correcting sampling bias cannot be applied directly for non-vertical, finite sampling areas. Wathugala et al. (1990) presented, using a vector approach, a more general procedure for correcting sampling bias on orientation, applicable for sampling planes of any orientation.
5.2.3 Photographic mapping
Field sampling of discontinuities requires sufficient exposed and accessible rock faces, time and considerable cost. Photographic techniques provide a way of overcoming the above difficulties (Hagan, 1980; Thomas et al., 1987; Franklin et al., 1988; BlinLacroix et al., 1990; Tsoutrelis et al., 1990; Ord & Cheung, 1991; Crosta, 1997). Application of photographic techniques provides a partly automated method for estimating discontinuity characteristics including orientation, size, spacing and surface geometry. Photographs of the rock face have to get through the digitizing and processing phase before performing any correction and analysis. Many image processing software programs exist but, according to Crosta (1997), the best way is still the digitization of fracture lineaments (2-D) by means of a digitizing board. This approach allows for a more correct representation of the fractures with respect to other automatic procedures. In fact, the operator, who preferably should be the same person who accomplished the field survey, is allowed to select or discard lineaments that can be ascribed to or not to the discontinuity network (vegetation, shadows, facets). The digitized photographs can then be interrogated by computerized sampling. The sampling techniques can vary from a single scanline or window to multiple scanlines or windows. Discontinuity characteristics obtained from photographic mapping have been found to agree well with values obtained using standard manual procedures (Tsoutrelis et al., 1990; Crosta, 1997).
5.3 BORINGS
Borings, in most cases, provide the only viable exploratory tool that directly reveals geologic evidence of the subsurface site conditions. In addition to exploring geologic stratigraphy and structure, borings are necessary to obtain samples for laboratory engineering property tests. Borings are also frequently made for other purposes, such as collection of groundwater data, performing in situ tests, installing instruments, and exploring the condition of existing structures. Of the various boring methods, rock core borings are the most useful in rock foundation investigations.
5.3.7 Rock core boring
Rock core boring is the process in which diamond or other types of core drill bits are used to drill exploratory holes and retrieve rock cores. Good rock core retrieval with a minimum of disturbance requires the expertise of an experienced drill crew. Core bits that produce 2.0 inch (nominal) diameter cores (i.e., NW or NQ bit sizes) are satisfactory for most exploration work in good rock as well as provide sufficient size samples for most
Drilled shafts in rock 178

rock index tests such as unconfined compression, density, and petrographic analysis. However, the use of larger diameter core bits ranging from 4.0 to 6.0 inches (nominal) in diameter are frequently required to produce good cores in soft, weak and/or fractured strata. The larger diameter cores are also more desirable for samples from which rock strength test specimens are prepared; particularly strengths of natural discontinuities. The number of borings and the depths to which bore holes should be advanced are dependent upon the subsurface geological conditions, the project site areas, types of projects and structural features. Where rock mass conditions are known to be massive and of excellent quality, the number and depth of borings can be minimal. Where the foundation rock is suspected to be highly variable and weak, such as karstic limestone or sedimentary rock containing weak and compressible seams, one or more borings for each major load bearing foundation element may be required. In cases where structural loads may cause excessive deformation, at least one of the boreholes should be extended to a depth equivalent to an elevation where the structure imposed stress acting within the foundation material is no more than 10 percent of the maximum stress applied by the foundation.
While the majorities of rock core borings are drilled vertically, inclined borings and in some cases oriented cores are required to adequately define stratification and jointing. In near vertical bedding, inclined borings can be used to reduce the total number of borings needed to obtain core samples of all strata. Where precise geological structure is required from core samples, techniques involving oriented cores are sometimes employed. In these procedures, the core is scribed or engraved with a special drilling tool so that its orientation is preserved. In this manner, both the dip and dip orientation of any joint, bedding plane, or other planar surface can be ascertained.
To ensure the maximum amount of data recovered from rock core borings it is necessary to correctly orient boreholes with respect to discontinuities present in the rock mass. If there is an outcrop present the main discontinuity sets should be established and the borehole(s) drilled to intersect these sets at as large an angle as possible. If no outcrop is present, the discontinuity pattern is unknown, and to ensure representative results, a minimum of three holes should be drilled as nearly orthogonal to each other as possible (ISRM, 1978; McMillan et al., 1996).
(a) Core logging
From core logging, one can obtain the total core recovery, discontinuity frequency, rock quality designation (RQD) and other discontinuity information such as orientation, spacing and aperture (ISRM, 1978). Before making detailed observations the core as a whole should be examined to determine the structural boundaries (domains) and geological features to be measured. The markers indicating depths of geological horizons and the start and end of each run should be carefolly checked for errors.
Total core recovery is defined as the summed length of all pieces of recovered core expressed as a percentage of the length drilled and should be measured and recorded to the nearest 2% if possible. When the core is highly fragmented the length of such portions is estimated by assembling the fragments and estimating the length of core that the fragments appear to represent. Core recovery is normally used to describe individual core runs or whole boreholes, and not specific structurally defined rock units. The results obtained in a rock mass of poor quality will be strongly dependent on the drilling
Site investigation and rock testing 179

equipment and the skill of the drilling crew. Core grinding may result in excessive lost core. Core that is damaged in this way should always be recorded. The depth drilled at start and end of zones of core loss should be carefully recorded. The relevant lengths lost can be replaced by wooden blocks with markings on both ends.
Frequency is defined as the number of natural discontinuities intersecting a unit length of recovered core and should be counted for each meter of core. Artificial fractures resulting from rough handling or from drilling process should be discounted only when they can be clearly distinguished from natural discontinuities. It should be noted that orientation bias need be corrected in order to obtain the true discontinuity frequency. This can be done by treating the core axis as a scanline and using Equation (5.2).
Discontinuity spacing may also be estimated by matching the individual core pieces and measuring the length along the core axis between adjacent natural discontinuities of one set. Again the orientation bias need be corrected in order to obtain the true discontinuity spacing (Equation 5.1).
Terzaghi’s (1965) method (Equations 5.1 and 5.2) for correcting the orientation bias assumes discontinuities of infinite size and does not consider the effect of borehole size. For discontinuities of finite size intersecting a borehole, the size of both the discontinuity and borehole will influence the probability of intersection. Mauldon and Mauldon (1997) developed a procedure for correcting orientation bias when sampling discontinuities using a borehole. In their approach, discontinuities are assumed to be discs of finite size and the borehole is assumed to be an infinitely long cylinder of circular cross section.
Rock quality designation (RQD) is a modified core recovery percentage in which all the pieces of sound core over 4 in. (10.16 cm) long are counted as recovery, and are expressed as a percentage of the length drilled. The small pieces resulting from closer jointing, faulting or weathering are discounted. The detailed procedure for estimating RQD has been described in Chapter 2.
(b) Core orientation
To determine the dip and dip orientation of discontinuities from core samples, the core orientation need be known. The following briefly describes some of the techniques for determining the core orientation. Craelius Method (Goodman, 1976; ISRM, 1978) Orientation of the core is based on orienting the first piece of core in each core run. The orienting device is a cylinder, of about the same diameter as the core, with six locking extension feet. At the beginning of each core run, it is inserted on the front of the core barrel with the feet fully extended. It is lowered with the core barrel and when it hits the bottom, the feet are depressed differentially until they lock into position. The orienting device rides into the barrel as coring progresses. When the core barrel is emptied, the top of the core is laid in an alignment cradle against the Craelius device and rotated to find the proper fit of the feet against the rough top-of-core, and the orientation of the first piece of core can thus be determined. The orientation of other pieces is determined by laying them on a “V” trough in proper sequence and rotating them as necessary to fit all pieces together. This method works well if adjacent pieces of core can be matched. Zones of core loss and perpendicularly intersected discontinuities reduce the effectiveness of the method locally.
Drilled shafts in rock 180

Christensen-Huegel Method (Goodman, 1976; ISRM, 1978) The ChristensenHuegel barrel contains three knives on a shoe mounted on the end of the inner barrel, so that as the core enters the core holder, three grooves are cut longitudinally. The barrel also has a compass photo device to give the bearing of the hole and the orientation of a marker oriented relative to one of the scribing lines. Integral Sampling Method (Goodman, 1976; ISRM, 1978) The cores are first reinforced with a grouted bar whose azimuth is known from positioning rods. The reinforcing bar is co-axially overcored with a large diameter coring crown (see Fig. 5.3). Clay Core Barrel Method (Call et al., 1981) A modified inner core barrel is used with conventional diamond drilling equipment (see Fig. 5.4). The barrel is eccentrically weighted with lead and lowered into an inclined, fluid-filled borehole so that its orientation with respect to the vertical is known. Modeling clay protrudes from the downhole end of the inner barrel such that it also extends through the drill bit when the inner and outer tubes are engaged. The barrel assembly is pressed against the hole bottom which causes the clay to take an impression of the core stub left from the previous core run. The inner barrel is then retrieved with the wire-line and a conventional barrel is lowered to continue coring. At the completion of the run, the recovered core is fitted together and the core is oriented by matching the piece of core from the upper end of the core run with the oriented clay imprint. The clay barrel method can only be used in inclined holes within the dip range of 45° to 70° where the weighted barrel will orient itself as it is lowered down the hole. Like the Craelius method, this method works well only if adjacent pieces of core can be matched.
Pendulum Orientation Method (Webber & Gowans, 1996) Orientation of the core is based on orienting the last piece of core in each core run. The pendulum orientation system incorporates a pendulum which moves under gravitational force while drilling to indicate the lowest position at an inclined borehole (see Fig. 5.5). The system depends on maintaining a fixed rotational relationship between the inner tube of the corebarrel and the orientation device containing the pendulum. This is achieved by rigidly fixing the orientation device to a modified spindle in the corebarrel head. Once the core run is complete an overshot trigger is lowered to activate the core orientator. The overshot device latches onto the core barrel assembly, triggering the pendulum by pushing it downwards against the action of a spring. The lowest position of the inner tube in the inclined borehole is then indicated by the point of the pendulum which emerges through one of the 72 small holes on the indicator plate. The pendulum and the inner tube are then fixed. The core barrel can then be removed. At the completion of the run, the last piece of core can be oriented by marking the lowest point from the point of the pendulum and the rest pieces of core can be oriented by matching the pieces of core from the lower end of the core run. The system is designed to operate in boreholes with a minimum inclination of 5° from the vertical. Like the Craelius method and clay barrel method, this method works well only if adjacent pieces of core can be matched.
Site investigation and rock testing 181

Fig. 5.3 A sketch showing stages in removing an integral sample: (1) positioning rod; (2) connecting sleeve; (3) cementing material; and (4) integral sample before drilling it free (after Goodman, 1976).
Drilled shafts in rock 182

Fig. 5.4 Clay core barrel used to orient diamond core in an inclined drill hole (after Call et al., 1981).
5.3.2 Inspecting borehole walls
The sidewalls of the borehole from which the core has been extracted offer a unique picture of the subsurface where all structural features of the rock formation are still in their original position. This view of the rock can be important when portions of rock core have been lost during the drilling operation, particularly weak seam fillers, and when the true dip and dip direction of the structural features are required.
The spacing of discontinuities can be determined by televiewing or photographing the borehole walls. Experience in examining a variety of rock types drilled using different methods suggests that, for most rock types, the drilling process does not create significant fractures in the borehole wall (Gunning, 1992). As a result discontinuity spacing collected from borehole walls may be inherently more accurate and precise than that derived from borehole cores which can be badly affected by drilling and handling process.
Site investigation and rock testing 183

Fig. 5.5 A pendulum orientation device attached to a conventional corebarrel (after Webber & Gowans, 1996).
Borehole viewing and photography equipment include borescopes, photographic cameras, TV cameras, sonic imagery loggers, caliper loggers, and alignment survey devices. Borehole Periscopes can be used in small holes, but due to distortion of the optical path the depth is usually limited to about 30 m (Goodman, 1976; ISRM, 1978). Borehole cameras can be used to take photos of the borehole wall and the orientation and spacing data can be obtained by interpreting the photos (Goodman, 1976; ISRM, 1978). Closed Circuit Television (CCTV) provides a means of directly inspecting a borehole wall and if the direction of view of the camera can be orientated, it is possible to determine discontinuity orientation and spacing. In addition aperture, infilling and water seepage may also be assessed. Successful CCTV surveys can be conducted in either dry or water-filled holes. For best results in either case the borehole wall should be clean and stable. If the borehole is full of water then measures should be taken to ensure that the water is clear enough to give a side view image of the borehole wall (Gunning, 1992; McMillan et al., 1996). Acoustic Televiewer and Dipmeter offer great potential for analyzing discontinuities. Advances in technology and digital instrumentation mean that such methods can provide effective data acquisition systems. Acoustic televiewers only operate in fluid filled boreholes (Gunning, 1992).
Drilled shafts in rock 184

5.3.3 Large-diameter borings
Large-diameter borings, 2 feet or more in diameter (e.g., the borings of large drilled shafts), permit direct examination of the sidewalls and bottoms of the boring and provides access for obtaining high-quality undisturbed samples. Direct inspection of the sidewalls and bottoms may reveal details, such as thin weak layers or old shear planes, that may not be detected by continuous undisturbed sampling. However, direct measurements may not always be possible because of water in the borehole and concerns for the safety of personnel.
It is very often that no outcrop can be used at a site to obtain trace lengths of discontinuities. In this case, trace length data can be obtained from the sidewalls and bottoms of large-diameter borings such as the borings of large drilled shafts. If only several traces or even no trace is present at a bottom, one can use bottoms at different depths during the drilling process to collect the trace length data and then use the entire data set (see Fig. 5.6).
5.4 EXPLORATORY EXCAVATIONS
Test pits, test trenches, and exploratory tunnels provide access for larger-scaled observations of rock mass conditions, for determining top of rock profile in highly weathered rock/soil interfaces, and for some in situ tests which cannot be executed in a smaller borehole.
5.4.1 Test pits and trenches
In weak or highly fractured rock, test pits and trenches can be constructed quickly and economically by surface-type excavation equipment. Final excavation to grade where samples are to be obtained or in situ tests performed must be done carefully. Test pits and trenches are generally used only above the groundwater level. Exploratory trench excavations are often used in fault evaluation studies. An extension of a bedrock fault into much younger overburden materials exposed by trenching is usually considered proof of recent fault activity.
Site investigation and rock testing 185

Fig. 5.6 Sampling at the bottom of the hole, during the drilling process at different depths, to obtain trace length data (L is the depth of the drilled shaft).
5.4.2 Exploratory tunnels
Exploratory tunnels/adits permit detailed examination of the composition and geometry of rock structures such as joints, fractures, faults, shear zones, and solution channels. They are commonly used to explore conditions at the locations of large underground excavations and the foundations and abutments of large dam projects. They are particularly appropriate in defining the extent of marginal strength rock or adverse rock structure suspected from surface mapping and boring information. For major projects where high-intensity loads will be transmitted to foundations or abutments, tunnels/adits afford the only practical means for testing in-place rock at locations and in directions corresponding to the structure loading. The detailed geology of exploratory tunnels, regardless of their purpose, should be mapped carefully. The cost of obtaining an accurate and reliable geologic map of a tunnel is usually insignificant compared with the
Drilled shafts in rock 186

cost of the tunnel. The geologic information gained from such mapping provides a very useful additional dimension to interpretations of rock structure deduced from other sources. A complete picture of the site geology can be achieved only when the geologic data and interpretations from surface mapping, borings, and pilot tunnels are combined and well correlated. When exploratory tunnels are strategically located, they can often be incorporated into the permanent structure. Exploratory tunnels can be used for drainage and post-construction observations to determine seepage quantities and to confirm certain design assumptions. On some projects, exploratory tunnels may be used for permanent access or for utility conduits.
5.5 GEOPHYSICAL EXPLORATIONS
5.5.1 General description
Geophysical techniques consist of making indirect measurements on the ground surface, or in boreholes, to obtain generalized subsurface information. Geologic information is obtained through analysis or interpretation of these measurements. Boreholes or other subsurface explorations are needed for reference and control when geophysical methods are used. Geophysical explorations are of greatest value when performed early in the field exploration program in combination with limited subsurface explorations. Geophysical explorations are appropriate for a rapid, though approximate, location and correlation of geologic features such as stratigraphy, lithology, discontinuities, ground water, and for the in situ measurement of dynamic elastic moduli and densities. The cost of geophysical explorations is generally low compared with the cost of core borings or test pits, and considerable savings may be realized by judicious use of these methods.
Geophysical methods can be classified as active or passive techniques. Active techniques impart some energy or effect into the earth and measure the earth materials’ response. Passive measurements record the strengths of various natural fields which are continuous in existence. Active techniques generally produce more accurate results or more detailed solutions due to the ability to control the size and location of the active source.
5.5.2 Seismic methods
Seismic methods are the most commonly conducted geophysical surveys for engineering investigations. Seismic surveys measure the relative arrival times, and thus the velocity of seismic waves traveling between an energy source and a number of geophones. The energy source may be a hammer blow, an explosion of a propaneoxygen mixture in a heavy chamber (gas-gun), or a light explosive charge. There are two major classes of seismic waves: body waves which pass through the volume of a material and surface waves that exist only near a boundary. The body waves consist of the compressional or pressure or primary wave (P-wave) and the secondary or transverse or shear wave (S-wave). P-waves travel through all media that support seismic waves. P-waves in fluids, e.g. water and air, are commonly referred to as acoustic waves. S-waves travel slower than P-waves and can only transit material that has shear strength. S-waves do not exist in
Site investigation and rock testing 187

liquids and gases, as these media have no shear strength. The velocities of the P- and S- waves are related to the elastic properties and density of a medium by the following equations:
(5.4)
(5.5)
(5.6) E=2G(1+ν)
(5.7)
where ν is the Poisson’s ratio; Vp is the velocity of the P-wave; Vs is the velocity of the S-wave; G is the shear modulus; ρ is the density; and E is the Young’s or elastic modulus. It should be noted that these are not independent equations. Knowing two velocities uniquely determines only two unknowns of ρ, ν and E. Shear modulus is dependent on two other values. Usually the possible range of ρ is approximated and ν is estimated. The typical density values of intact rocks have been presented in Table 2.7. Table 5.1 provides some typical values of Vp and ν. The velocity of the S-wave in most rocks is about half the velocity of the P-wave.
Surface waves are produced by surface impacts, explosions and wave form changes at boundaries. One of the surface waves is the Rayleigh wave which travels about 10% slower than the S-wave. The Rayleigh wave exhibits vertical and horizontal displacement in the vertical plane of the ray path. A point in the path of a Rayleigh wave moves back, down, forward, and up repetitively in an ellipse like ocean waves.
The equipment used for seismic surveys includes the following components:
1) Seismic sources. The seismic source may be a hammer repetitively striking an aluminum plate or weighted plank, drop weights of varying sizes, a rifle shot, a harmonic oscillator, waterborne mechanisms, or explosives. The energy disturbance for seismic work is most often called the “shot,” an archaic term
Table 5.1 Typical/representative field values of Vp and ν (after ASCE, 1998).
Material Vp (m/s) ν
Air 330
Damp loam 300–750
Dry sand 450–900 0.3–0.35
Clay 900–1,800 ~0.5
Fresh, shallow water 1,430–1,490
Drilled shafts in rock 188

Saturated, loose sand 1,500
Basal/lodgement till 1,700–2,300
Rock 0.15–0.25
Weathered igneous & metamorphic rock 450–3,700
Weathered sedimentary rock 600–3,000
Shale 800–3,700
Sandstone 2,200–4,000
Metamorphic rock 2,400–6,600
Unweathered bsalt 2,600–4,300
Dolostone and limestone 4,300–6,700
Unweathered granite 4,800–6,700
Steel 6,000
from petroleum seismic exploration. Reference to the “shot” does not necessarily mean an explosive or rifle source was used. The type of survey dictates some source parameters. Smaller mass, higher frequency sources are preferable. Higher frequencies give shorter wavelengths and more precision in choosing arrivals and estimating depths. Yet sufficient energy needs to be entered to obtain a strong return at the end of the survey line.
2) Geophones. The geophones receiving seismic energy are either accelerometers or velocity transducers, and convert ground shaking into a voltage response. Most geophones are vertical, single-axis sensors to receive the incoming wave form from beneath the surface. Some geophones have horizontal-axis response for S-wave or surface wave assessments. Triaxial phones, capable of measuring absolute response, are used in specialized surveys. Geophones are chosen for their frequency band response.
3) Seismographs. The equipment that records input geophone voltages in a timed sequence is the seismograph. Current practice uses seismographs that store the channels’ signals as digital data in discrete time units. Earlier seismographs would record directly to paper or photographic film. Stacking, inputting, and processing the vast volumes of data and archiving the information for the client virtually require digital seismographs.
In a homogeneous medium a bundle of seismic energy travels in a straight line. Upon striking a boundary between different material properties, wave energy is refracted, reflected, and converted. The properties of the two media and the angle at which the incident ray path strikes will determine the amount of energy reflected off the surface, refracted into the adjoining material, lost as heat, and changed to other wave types. Figure 5.7 shows the refraction and reflection of a seismic ray incident at an angle θ1 on the boundary between media with velocities V1 and V2. Refraction, as with any wave, obeys Snell’s Law relating the angle between the ray path and the normal to the boundary to the velocity V(VP or Vs appropriate). Thus in Figure 5.7(a), we have
Site investigation and rock testing 189

(5.8)
If refraction continues through a series of such interfaces parallel to each other, we have
(5.9)
If the lower material has a higher velocity (V2>V1 in Fig. 5.7), a particular down-going ray making an angle
(5.10)
with the normal will critically refract along the boundary and return to the surface at the same angle [see Fig. 5.7(b)].
Fig. 5.7 (a) Reflection and refraction of a seismic ray incident at an angle θ1 on the boundary between media with velocities V1 and V2; and (b) Critically refracted wave travels below the boundary and returns to the surface.
Drilled shafts in rock 190

(a) Seismic refraction method
The method of seismic refraction is schematically shown in Figure 5.8. Waves of different types traveling by various paths to points on the surface at various horizontal distances, X, from the shot are detected by geophones. For geophones near the shot, the first arrivals will be directly from the shot. If the lower material has a higher velocity [V2>V1 in Fig. 5.8(a)], rays traveling along the boundary will be the first to arrive at geopehone away from the shot. If the time of first arrivals is plotted against distance X, a plot with two straight branches as shown in Figure 5.8(b) will be obtained. From an examination of Figure 5.8(b) one can obtain the following information:
1) The slopes of the two straight lines are equal to 1/V1 and 1/V2, respectively. 2) The depth to the interface, D, can be obtained by
Fig. 5.8 Simplified representation of seismic refraction method: (a) Shot, geophones and direct and refiracted wave paths; and (b) Time versus distance plot for seismic refraction survey as shown in (a).
Site investigation and rock testing 191

(5.11)
where XC is the crossover distance; and D is the depth to the horizontal refracting interface (Fig. 5.8).
When the interface is dipping downwards from the shot towards the geophones, the velocity of the lower medium obtained as described above will be smaller than the true velocity. In the opposite situation, with the interface rising from the shot towards the geophones, the obtained velocity will be higher than the true one. By reversing shots and measuring the velocities in both directions (up- and down- dip) the dip of the interface can be estimated (ASCE, 1998).
The method described above for finding the seismic wave velocities and the depths to the refracting interfaces can readily be extended to systems with three or more layers with boundaries that need not be planar and velocities that may show lateral changes. For details, the reader can refer to Griffiths and King (1981) and ASCE (1998).
In simple cases, such as the two layer system described above, the seismic refraction method can predict depths to geological surfaces with an accuracy of ±10%. In complex formation, the accuracy drops considerably, and is much more dependent on the skill of the operators. The two most difficult geologic conditions for accurate refraction work are the existence of a thin water-saturated zone just above the bedrock and the existence of a weathered zone at the top of bedrock. The method fails completely, however, when a high velocity layer covers a low velocity one, since there is no refraction at this case.
(b) Seismic reflection method
A portion of the seismic energy striking an interface between two differing materials will be reflected from the interface (Fig. 5.7). The ratio of the reflected energy to incident energy is called the reflection coefficient. The reflection coefficient is defined in terms of the densities and seismic velocities of the two materials as:
(5.12)
where R is the reflection coefficient; ρ1 and ρ2 are densities respectively of the first and second layers; V1 and V2 are seismic velocities respectively of the first and second layers. Modern reflection methods can ordinarily detect isolated interfaces whose reflection coefficients are as small as 0.02.
The physical process of reflection is illustrated in Figure 5.9, where the ray paths from the successive layers are shown. As in Figure 5.9, there are commonly several layers beneath the ground surface which contribute reflections to a single seismogram. Thus, seismic reflection data are more complex than refraction data because it is these later arrivals that yield information about the deeper layers. At later times in the record, more noise is present thus making the reflections difficult to extract from the unprocessed record. Figure 5.10 indicates the paths of arrivals that would be recorded on a multi-channel seismograph. Another important feature of modern reflection data acquisition is
Drilled shafts in rock 192

illustrated by Figure 5.11. If multiple shots, S1 and S2, are recorded by multiple geophones, G1 and G2, and the geometry is as shown in the figure, the reflector point for both rays is the same. However, the ray paths are not the same length, thus the reflection will occur at different times on the two traces. This time delay, whose magnitude is indicative of the subsurface velocities, is called normalmoveout. With an appropriate time shift, called the normal-moveout correction, the two traces (S1 to G2 and S2 to G1) can be summed, greatly enhancing the reflected energy and canceling spurious noise.
Fig. 5.9 Schematic of seismic reflection method.
Fig. 5.10 Multi-channel recording of seismic reflections.
Site investigation and rock testing 193

Fig. 5.11 Common depth point recording.
(c) Rayleigh wave method
Of the surface waves, the Rayleigh wave is important in engineering studies because of its simplicity and because of the close relationship of its velocity to the shear wave velocity for earth materials. Approximation of Rayleigh wave velocities as shear-wave velocities causes less than a 10-percent error.
Rayleigh wave studies for engineering purposes have most often been made in the past by direct observation of the Rayleigh wave velocities. One method consists of excitation of a monochromatic wave train and the direct observation of the travel time of this wave train between two points. As the frequency is known, the wavelength is determined by dividing the velocity by the frequency.
(d) Cross hole method
Cross hole testing takes advantage of generating and recording seismic body waves, both the P- and S-waves, at selected depth intervals where the source and receiver(s) are maintained at equal elevations for each measurement. Figure 5.12 illustrates a general field setup for the cross hole seismic test method. Knowing the distance between the source borehole and the geophone borehole and measuring the time of travel of the induced wave from the source to the geophone, the velocity of the rock mass can be simply obtained by
(5.13)
where D (D1 or D2 in Fig. 5.12) is the distance between the source borehole and the geophone borehole; and t is the time of travel of the induced wave from the source to the geophone.
Particle motions generated with different seismic source types used during cross hole testing are three-directional. Therefore, three-component geophones with orthogonal orientations yield optimal results when acquiring cross hole P- and/or S-wave seismic
Drilled shafts in rock 194

signals. The requirement for multiple drill holes in cross hole testing means that care must be taken when completing each borehole with casing and grout. ASTM procedures call for PVC casing and a grout mix that closely matches the formation density. Another critical element of cross hole testing, which is often ignored,
Fig. 5.12 Schematic of cross hole method.
is the requirement for borehole directional surveys. Borehole verticality and direction (azimuth) measurements should be performed at every depth interval that seismic data are acquired. Since seismic wave travel times should be measured to the nearest tenth of a millisecond, relative borehole positions should be known to within a tenth of a foot. Assuming that the boreholes are vertical and plumb leads to computational inaccuracies and ultimately to data which cannot be quality assured.
Unlike surface seismic techniques previously described, cross hole testing requires a more careful interpretation of the wave forms acquired at each depth. For example, in cross hole testing, the first arrival is not always the direct ray path. As illustrated schematically in Figure 5.13, when the source and receivers are located within a layer that has a lower velocity than either the layer above or below it (this is termed a hidden layer in refraction testing), refracted waves can be the first arrivals. Both the source/receiver distance above or below the high velocity layer and the velocity contrast across the seismic interface determine if the refracted wave will arrive before the direct wave.
Site investigation and rock testing 195

(e) Down hole method and up hole method
For the down hole method, the seismic waves are generated by a source located at the ground surface and the geophones are located inside a borehole drilled adjacent to the energy source (see Fig. 5.14). Each test involves the determination of the wave velocity based on the distance between the ground surface and the level at which the geophone is located, and the respective traveling time.
The equipment is basically the same as for the cross hole method. The only significant difference is the energy source. The impulses are generated by hammering a plate after assuring a good contact with the ground. For generating P-waves the blow is normal to the surface of the plate (and to the ground surface) and for generating a S-waves the blow is horizontal (parallel to the ground surface). When measuring S-wave velocities, the test can be repeated with the geophone at the same level, by reversing the direction of the impact, which allows a second recording.
In the opposite, for the up hole method, the seismic waves are generated in the borehole and the geophones are located at the ground surface.
The main advantage of the down hole and up hole methods over the cross hole method lies in the fact that only one regular borehole is required to perform the test.
Fig. 5.13 Refracted ray paths in cross hole seismic test where V1>V2<V3 and V1<V3.
Drilled shafts in rock 196

Fig. 5.14 Schematic of down hole method.
5.5.3 Electrical resistivity method
Electrical resistivity surveying is based on the principle that the distribution of electrical potential in the ground around a current-carrying electrode depends on the electrical resistivities and distribution of the surrounding soils and rocks. The usual practice in the field is to apply an electrical direct current (DC) between two electrodes implanted in the ground and to measure the difference of potential between two additional electrodes that do not carry current (see Fig. 5.15). Usually, the potential electrodes are in line between the current electrodes, but in principle, they can be located anywhere. The current used is direct current, commutated direct current (i.e., a square-wave alternating current), or AC of low frequency (typically about 20 Hz). All analysis and interpretation are done on the basis of direct currents. The distribution of potential can be related theoretically to ground resistivities and their distribution for some simple cases, notably, the case of a horizontally stratified ground and the case of homogeneous masses separated by vertical planes (e.g., a vertical fault with a large throw or a vertical dike). For other kinds of resistivity distributions, interpretation is usually done by qualitative comparison of
Site investigation and rock testing 197

observed response with that of idealized hypothetical models or on the basis of empirical methods.
Mineral grains composing soils and rocks are essentially nonconductive, except in some exotic materials such as metallic ores, so the resistivity of soils and rocks is governed primarily by the amount of pore water, its resistivity, and the arrangement of the pores. Since the resistivity of a soil or rock is controlled primarily by the pore water conditions, there are wide ranges in resistivity for any particular soil or rock type (see Table 5.2), and resistivity values cannot be directly interpreted in terms of soil type or lithology. Commonly, however, zones of distinctive resistivity can be associated with specific soil or rock units on the basis of local field or drill hole information, and resistivity surveys can be used profitably to extend field investigations into areas with very limited or nonexistent data. Also, resistivity surveys may be used as a reconnaissance method, to detect anomalies that can be further investigated by complementary geophysical methods and/or drill holes.
Fig. 5.15 Schematic of electrical resistivity method.
Table 5.2 Typical resistivity values of soils and rocks (after Griffiths & King, 1981).
Soil/Rock Resistivity (ohm-m)
Soft shale, clay 1–10
Hard shale 10–500
Sand 50–1,000
Sandstone 50–5,000
Porous limestone 100–5,000
Dense limestone >5,000
Igneous rock 100–1,000,000
Metamorphic rock 50–1,000,000
Drilled shafts in rock 198

5.5.4 Ground penetration radar
Ground Penetrating Radar (GPR), also known as ground probing radar, ground radar or georadar, has been widely used in high-resolution mapping of soil and rock stratigraphy (Deng, 1996; Sharma, 1997). The GPR method uses high-frequency (80 to 1,000 MHz) electromagnetic (EM) waves transmitted from a radar antenna to probe the earth. The transmitted EM waves are reflected from various interfaces within the ground and are detected by the radar receiver. Reflecting interfaces may be soil horizons, the groundwater surface, soil/rock interfaces, man-made objects, or any other interfaces possessing a contrast in dielectric properties. The GPR method is analogous to seismic reflection except for the energy source (Sharma, 1997; ASCE, 1998).
Contrasts in dielectric properties across an interface cause EM waves to be reflected. Fracture fillings with dielectric properties different from their adjacent rock materials can cause radar reflections and thus can be detected.
One limitation of the GPR method is that the penetration depth of radar is limited usually less than 20 meters (Cummings, 1990; Kearey & Brooks, 1991; Sharma, 1997; ASCE, 1998). At the Gypsy Outcrop Site in Northeastern Oklahoma, the maximum depth with noticeable radar response is about 10 meters (Deng, 1996). Therefore, the GPR method can only be used for shallow depth survey.
Similar to the seismic wave method, the processing and interpretation of recorded GPR data is critically important. Due to the kinematic similarities between radar and seismic wave propagation, seismic processing techniques are widely used to process the GPR data (Deng, 1996; Sharma, 1997).
5.6 LABORATORY TESTING
Laboratory tests are usually performed to determine index values for identification and correlation, further refining the geologic model of the site, and provide values for engineering properties of the rock used in the analysis and design of foundations. The selection of samples and the number and type of tests are influenced by local subsurface conditions and the size and type of structure. Prior to any laboratory testing, rock cores should have been visually classified and logged.
Selection of samples and the type and number of tests can best be accomplished after development of the geologic model using results of field observations and examination of rock cores, together with other geotechnical data obtained from earlier preliminary investigations. The geologic model, in the form of profiles and sections, will change as the level of testing and the number of tests progresses. Testing requirements are also likely to change as more data become available and are reviewed for project needs.
Table 5.3 summarizes laboratory tests according to purpose and type. The tests listed are the types more commonly performed for input to rock foundation analysis and design. Details and procedures for individual test types can be found in books on rock mechanics and rock engineering.
For rock specimens with the same geometrical shape, the strength decreases with increasing size, reaching a limit value asymptotically (see Section 4.5 for details on scale effect). This size, beyond which no further decrease in strength is observed, depends on the type of rock material. A simplified explanation for this phenomenon is that rock is not
Site investigation and rock testing 199

a continuous solid material, but may contain various types of discontinuities or flaws. The strength of any rock specimen is, therefore, a statistical value depending on how many and what type of discontinuities are present. In smaller specimens the probability of the presence of such discontinuities is smaller and thus the strength is higher.
In addition to the size effect, the strength of a rock specimen is affected by its shape, i.e. the length-to-diameter ratio of the test specimen or the width-to-height ratio of the specimen with a square cross-section. Figure 5.16 shows the effect of length-to-
Table 5.3 Summary of purpose and type of laboratory tests for rock (after ASCE, 1996).
Purpose of test Type of test
Strength Unconfined compression Direct shear Triaxial compression Direct tension Brazilian split Point load1
Deformability Unconfined compression Triaxial compression Swell Creep
Permeability Gas permeability
Characterization Water content Porosity Density (unit weight) Specific gravity Absorption Rebound Sonic velocities Abrasion resistance
1. Point load tests are also frequently performed in the field.
diameter ratio on the unconfined compressive strength of cylindrical sandstone specimens (John, 1972). This effect may be explained by the variation in the stress distribution in the test specimen as a result of the end constraint. The influence of loading platens on the specimen ends in a compression test diminishes with increasing length of specimen.
To minimize the effects of size and shape on the test results, minimum dimensions and minimum height-to-diameter ratios for test specimens have been recommended by ASTM (1971) and ISRM (1979a).
Drilled shafts in rock 200

5.7 IN SITU TESTING
5.7.1 General description
In situ tests are often the best means for determining the engineering properties of subsurface materials and, in some cases, may be the only way to obtain meaningful results. Table 5.4 lists some of the most widely used in situ tests and their purposes. In situ rock tests are performed to determine in situ stresses and deformation properties of the jointed rock mass, shear strength of jointed rock mass or critically weak seams within the rock mass, residual stresses within the rock mass, and rock mass permeability. Large-scale in situ tests tend to average out the effect of complex interactions. In situ tests in rock are frequently expensive and should be reserved for projects with large, concentrated loads. Well-conducted tests may be useful in reducing overly conservative assumptions. Such tests should be located in the same general area as the proposed structure and test loading should be applied in the same direction as the proposed structural loading.
Some of the strength and deformability tests are described in more detail in the following.
Fig. 5.16 Influence of length-to-diameter ratio on the unconfined compressive strength of dry sandstone (after John, 1972).
Site investigation and rock testing 201

Table 5.4 Summary of purpose and type of in situ tests for rock (modified from ASCE, 1996).
Purpose of test Type of test
Strength Field vane shear1 Direct shear Pressuremeter2 Unconfined compression2 Borehole jacking2
Deformability Seismic3 Pressuremeter or dilatometer Plate bearing Radial (tunnel) jacking2 Borehole jacking2 Chamber (gallery) pressure2
Bearing capacity Plate bearing1 Standard penetration1
Stress conditions Hydraulic fracturing Pressuremeter Overcoring Flat jack Uniaxial (tunnel) jacking2 Chamber (gallery) pressure2
Permeability Constant head Rising or falling head Well slug pumping Pressure injection
Notes: 1. Primarily for clay shales, badly decomposed, or moderately soft rocks, and rock with soft seams. 2. Less frequently used. 3. Dynamic deformability.
5.7.2 Strength tests
The most common in situ test for determining the strength of rock masses is the direct shear test. Triaxial tests have been conducted in particular situations, but due to difficulties in execution, they are of very restricted use. The scope of the direct shear test is to measure the peak and residual shear strength as a function of the normal stress on the sheared plane. At least three or four specimens should be tested at different normal stresses on the same test horizon.
Figure 5.17 shows a typical in situ direct shear test arrangement. In the case of tests conducted in adits, the reaction for the normal load is obtained from the opposite wall of the adit. Tests can be conducted on a rock surface using cables anchored into the rock adjacent to the test site to supply the normal reaction. The procedure for conducting an in situ direct shear test can be referred to Oliveira and Charrua Graca (1987). By conducting
Drilled shafts in rock 202

direct shear test on a set (three or four) of blocks, the shear strength curves as shown in Figure 5.18 can be obtained. The peak and residual strength
Fig. 5.17 Schematic of in situ shear test (after Oliveira & Charrua Graca, 1987).
Fig. 5.18 Shear strength curves from in situ shear tests (after Oliveira & Charrua Graca, 1987).
Site investigation and rock testing 203

parameters (cohesion and friction angle) can then be determined from the shear strength curves.
5.7.3 Deformability tests
As shown in Table 5.4, there are a number of in situ test methods available to estimate rock modulus (ASCE, 1996). The details about the seismic methods have been discussed in Section 5.5. In this section, the borehole dilatometer test, the boehole jack test, the plate bearing test, the flat jack test and the radial jacking test will be discussed.
(a) Borehole dilatometer test
The borehole dilatometer test expands a fluid filled flexible membrane in a borehole causing the surrounding wall of rock to deform. The fluid pressure and the volume of fluid equivalent to the volume of displaced rock are recorded. From the theory of elasticity, pressure and volume changes are related to the modulus. The primary advantage of the borehole dilatometer test is its low cost. The test is, however, restricted to relatively soft rock. Furthermore, the test influences only a relatively small volume of rock. Hence, modulus values derived from the borehole dilatometer tests are not considered to be representative of rock mass conditions.
The deformation modulus Em of the rock mass can be calculated from the dilatometer test by (Goodman, 1980)
(5.14)
where νm is the Poisson’s ratio of the rock mass; d is the diameter of the borehole test section; ∆p is the change in pressure applied uniformly over the borehole surface; and ∆d is the measured radial deformation.
For a Colorado School of Mines (CSM) dilatometer, a calibration test in a material of known modulus need be conducted to determine the stiffness of the membrane system. Figure 5.19 shows typical pressure-dilation curves for a calibration test and a test carried out in rock. A complete test usually consists of three loading and unloading cycles, with dilation and pressure readings being taken on both the loading and unloading cycles.
The shear modulus Gm and the deformation modulus Em of the rock mass in the borehole test section are given by (ISRM, 1987)
(5.15)
and Em=2(1+νm)Gm
(5.16)
where L is the length of the test section (cell membrane); d is the diameter of the borehole test section; νm is the Poisson’s ratio of the rock mass; ρ is the pump constant (the fluid
Drilled shafts in rock 204

volume displaced per turn of pump wheel); and km is the stiffness of the rock mass, which can be obtained by
Fig. 5.19 Typical pressure-dilation curves for a Colorado School of Mines (CSM) dilatometer (IRSM, 1987).
(5.17)
where ks is the stiffness of the hydraulic system [Equation (5.19)]; and kT is the stiffness of the overall system plus the rock mass (ratio D/C in Fig. 5.19). The rock mass stiffness km is calculated from calibration of the hydraulic system and the results of a pressure-dilation test carried out in a calibration cylinder of known modulus. The steps for calculating the rock mass stiffness are as follows.
If the shear modulus and Poisson’s ratio of the calibration cylinder are respectively Gc and νc, the stiffness of the calibration cylinder kc is
(5.18)
Site investigation and rock testing 205

where ri and ro are respectively the inside and outside radii of the calibration cylinder. The stiffness of the hydraulic system ks is calculated from the stiffness of the
calibration cylinder and the slope of the calibration pressure-dilation curve km (ratio B/A in Fig. 5.19) as follows
(5.19)
It is also necessary to make a correction for pressure losses due to the rigidity of the membrane. This is determined by inflating the dilatometer in the air without confinement to show the pressure required to inflate the membrane and the hydraulic system.
pi,corr=pi−nmp (MPa) (5.20)
where pi,corr is the corrected pressure; pi is the indicated pressure; n is the number of turns to attain pi; and mp is the slope of pressure-dilation curve for dilation in air (MPa/turn).
Another correction is required to account for loss of volume in the hydraulic system that takes place in inflating and seating the membrane. For the test measurements shown in Figure 5.19, the net corrected number of turns ∆ncorr is calculated from
(5.21)
(b) Borehole jack test
Instead of applying a uniform pressure to the full cross-section of a borehole as in the borehole dilatometer tests, the borehole jack presses plates against the borehole walls using hydraulic pistons, wedges, or flat jacks. This technique allows the application of significantly higher pressures required to deform hard rock. The NX-borehole (76 mm in diameter) jack (also known as the hard-rock jack or Goodman Jack) is the best known device for this test (Fig. 5.20). The deformation modulus of the rock mass can be calculated from a NX-borehole jack test by (Heuze, 1984; Heuze & Amadei, 1985)
Ecalc=0.86(0.93)d(∆Qh/∆d)T* (5.22)
where 0.86 is the factor for the three-dimensional effect; 0.93 is the hydraulic efficiency; d is the diameter of the borehole; ∆d is the change of borehole diameter; ∆Qh is the increment of hydraulic-line pressure; and T* is a coefficient depending on the Poisson’s ratio νm of the rock mass (Table 5.5).
In rock with a deformation modulus greater than about 7 GPa, there will be a longitudinal outward bending of the jack platens and the calculated modulus need be corrected to obtain the true modulus Em (Fig. 5.21). This correction is necessary because the bending gives larger displacements at the ends than at the center of the loading platens and the displacement gauges are located near the ends of the platens (Heuze, 1984).
Drilled shafts in rock 206

The advantage of the borehole jack test over the borehole dilatometer test is that the unidirectional pressure can be imposed in a given orientation. The limitation of the borehole jack test is that only a point modulus (for a small volume of rock mass) can be obtained.
Fig. 5.20 Schematic of loading of NX-borehole jack (Heuze, 1984).
Table 5.5 T* for full platen and rock contact (after Heuze, 1984).
νm 0.1 0.2 0.25 0.3 0.33 0.4 0.5
T* 1.519 1.474 1.438 1.397 1.366 1.289 1.151
Site investigation and rock testing 207

Fig. 5.21 Curve of Ecalc versus Em (after Heuze, 1984).
(c) Plate bearing test
In a plate bearing test a plane circular area of the rock surface is loaded and the induced deformation of the rock is measured. Usually the test is performed in small tunnels or adits and two opposite surfaces are loaded, thus providing the reaction support for the forces employed (Fig. 5.22). When it is necessary to conduct a test at the ground surface, special structures such as cables anchored at some depth below the surface must be employed to support the reaction (Fig. 5.23).
The site selected for a test should be large enough and carefully prepared. The areas to be loaded and their vicinities, from 0.5 to 1 diameters of the loading plate, must be cleaned of all disturbed rock. These areas should then be hand-prepared to become plane and parallel.
Usually a tunnel diameter gauge connecting the centers of the loaded surface measures the relative deformation. If more sophisticated information on deformation is needed, multiple-position borehole extensonmeters (MPBX) installed in holes drilled into the
Drilled shafts in rock 208

rock along the load axis can be used. The depth of the extensometer holes must be such that the deepest anchor is beyond the zone of deformation, a distance of about six diameters of the loading plate [Fig. 5.22(b)].
Assuming that the loaded surface behaves like a homogeneous infinite half space and that the rock mass behaves like an isotropic elastic linear medium, the deformation modulus of the rock mass can be calculated from the deformation measurements. For a test condition in which the bearing plate is circular and has a circular hole in the center through which the deformation measurements are made, the deformation modulus Em at any depth z is given by the following expression
(5.23)
where δz is the measured displacement at depth z below the lower surface of the loading plate; p is the applied pressure on the loading plate; νm is the Poisson’s ratio of the rock mass; R is the outer radius of the loading plate; r is the radius of the hole in the center of the loading plate; and C is a constant. For a perfectly rigid loading plate, the theoretical solution gives C as π/2. Since the actual loading plate has some flexibility, the measured deformation is somewhat greater than the theoretical deformation. This results in the calculated deformation modulus being smaller than the true modulus and for this reason the constant C is usually given the value of 2.
For a loading plate with no center hole, the deformation modulus is given by
(5.24)
For measurements at the surface of the rock where z=0, this expression reduces to
Site investigation and rock testing 209

Fig. 5.22 (a) Simple plate bearing test in a gallery; and (b) Plate bearing test in a gallery using multiple-position borehole extensonmeters (MPBX) (after IRSM, 1979b).
Drilled shafts in rock 210

Fig. 5.23 (a) Plate bearing test using a single anchorage cable; and (b) Plate bearing test using multiple anchorage cables.
Site investigation and rock testing 211

(5.25)
(d) Flat jack test
The flat jack test is a simple test in which slots cut in the rock mass are uniformly loaded by flat jacks inserted into them (Fig. 5.24). Deformation of the rock mass caused by pressurizing the flat jack is measured by the volumetric change in the jack fluid. The deformation modulus of the rock mass is derived from relationships between jack pressure and deformation.
Using loading, unloading and reloading cycles permits calculation of the deformation modulus of the rock mass by (Jaeger & Cook, 1979)
(5.26)
where p is the applied pressure; 2c is the length of the jack; 2∆y is the variation of pin separation; νm is the Poisson’s ratio of the rock mass; and y is the distance from the jack center to each of a pair of measuring pins.
The primary advantages of the flat jack test lie in its ability to load a large volume of rock and its relatively low cost.
Drilled shafts in rock 212

Fig. 5.24 Flat jack test: (a) Front view; and (b) Section after flat jack installation (after Jaeger & Cook, 1979).
(e) Radial jacking test
In this test the load is applied uniformly to the complete surface of a test chamber with a circular cross section and the radial deformations are measured along a number of axes. The results of this test provide the deformation modulus of a larger volume of the rock mass than is possible with the tests described earlier and, in the case of anisotropic rock, can show the variation of the modulus with orientation. Although more information on rock conditions is provided by the radial jacking test than the tests described earlier, the high cost and time required to conduct the test means that very few will be carried out and thus the results may not be representative of the overall site.
The best known and oldest variant of the radial jacking test is the pressure chamber test in which the pressure is applied by means of water filling the chamber. With this method, special care must be taken not to allow the water to flow from the chamber.
Site investigation and rock testing 213

6 Axial load capacity of drilled shafts in rock
6.1 INTRODUCTION
The design of axially loaded drilled shafts in rock usually involves computation of ultimate load capacity and prediction of settlement under working load. This chapter addresses the determination of the ultimate load capacity while the prediction of settlement at the working load will be discussed in Chapter 7.
Axially loaded drilled shafts in rock are designed to transfer structural loads to rock in one of the following three ways (CGS, 1985):
1. Through side shear only; 2. Through end bearing only; 3. Through the combination of side shear and end bearing.
Situations where support is provided solely by side shear resistance are those where the base of the drilled hole cannot be cleaned so that it is uncertain if any end bearing resistance will be developed. Alternatively, where sound bedrock underlies low strength overburden material, it may be possible to achieve the required support in end bearing only, and assume that no side shear support is developed in the overburden. However, where the shaft is drilled some depth into sound rock, a combination of side shear resistance and end bearing resistance can be assumed (Kulhawy & Goodman, 1980).
The load bearing capacity of a drilled shaft in rock is determined by the smaller of the two values: the structural strength of the shaft itself, and the ability of the rock to support the loads transferred by the shaft.
6.2 CAPACITY OF DRILLED SHAFTS RELATED TO REENFORCED CONCRETE
Axially loaded drilled shafts may fail in compression or by buckling. Buckling is possible in the long and slender part that extends above the ground surface. Scour of the soil/rock around the shaft will expose portions of the shaft, thus extending the unbraced length and making the shaft more prone to buckling.
The capacity of a shaft as a reinforced concrete element is a function of the shaft diameter, the strength of the concrete and the amount and type of reinforcement. The shaft should be designed such that the working stresses are limited to the allowable concrete stresses as shown in Table 6.1. For the reinforcing steel, the allowable design stress should not exceed 40% of its specified minimum yield strength, nor 206.8 MPa (30,000 psi) (ASCE, 1997).