Doctor ofPhilosophy in Petroleum Engineering New Mexico ...
177
LINE SOURCE SOLUTIONS OF INTERFACE CRESTING PROBLEMS FOR HORIZONTAL WELLS UNDER STEADY STATE FLOW CONDITIONS by Boyun Guo Submitted In Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy in Petroleum Engineering New Mexico Institute of Mining and Technology Socorro, New Mexico July 1992
Transcript of Doctor ofPhilosophy in Petroleum Engineering New Mexico ...

LINE SOURCE SOLUTIONS OF INTERFACE CRESTING
PROBLEMS FOR HORIZONTAL WELLS
UNDER STEADY STATE FLOW CONDITIONS
by
Boyun Guo
Submitted In Partial Fulfillment
of the Requirements for the Degree of
Doctor of Philosophy in Petroleum Engineering
New Mexico Institute of Mining and Technology
Socorro, New Mexico
July 1992

ACKNOWLEDGMENTS
I would like to express my gratitude to Dr. Robert L. Lee, my advisor, for his
encouragement and support throughout the duration of this work. In addition, I wish
to thank the other members of my committee, Dr. Stefan Miska, Dr. Randy S. Seright,
Dr. Robert E. Bretz, and Dr. Chia S. Chen, for the guidance and help they have offered
to me, and for their time and patience in reading and evaluating this thesis.
This work was financed by the Engineering Foundation Grant, the Graduate School
of the New Mexico Institute of Mining and Technology, and the Gaz de France. I am
deeply grateful for their support.
Special thanks go to Mr. Dick Carlson for his assistance in typing this thesis.
This work is dedicated to my father, Guo Jun, and my mother, Li Suzhen, for their
sacrifices they made that made my education possible, and to my wife, Wang Huimei, for
her seemingly endless patience and help in encouraging me in fulfilling my study in the
United States of America.
- 1 -

ABSTRACT
The number of horizontal oil wells has been increasing rapidly in the past few years
because of several advantages of their application. However, further improvement in the
oil production rate of horizontal wells is limited by the encroachment of water or gas
when bottom-water or gascap exists. This encroachment of water or gas is called interface
cresting. The behavior of the cresting in horizontal wells is unknown. The critical oil
production rate (defined as the maximum water-free or gas-free production rate) and
location of the water-oil or gas-oil interface need to be determined in horizontal oil wells.
This work focuses on the theoretical analysis of the cresting behavior in line-sink-
like horizontal wells under steady state flow conditions. The principle objectives of this
investigation are (1) to develop an approach to determination of the critical oil production
rate of horizontal wells and (2) to determination of the position of the water-oil or gas-oil
interface.
The mechanism of the water encroachment process is analyzed graphically in this
study. This analysis reveals that the existence (or non-existence) of an unstable water
crest depends upon the flowing pressure gradient beneath the well bore. If this flowing
pressure gradient is less than the hydrostatic pressure gradient of water, a stable water
crest exists right below the wellbore, i.e., no unstable water crest exists.
By treating the horizontal weUbore as a line sink, conformal mapping theory was
adopted in this study to solve the interface cresting problems under steady state flow
conditions. The critical oil production rates and locations of the interfaces for two water-
oil cresting systems and two gas-oil cresting systems were determined analytically in this
investigation. The difference between the two water-oil cresting systems is the different
locations of wellbores in the two flow domains. The wellbore is located at the top of the oil
• •
- 11 -

zone in the first system and below the roof of the oil zone in the second system. The same
difference exists in two gas-oil cresting systems. In the first system, the wellbore is located
at the bottom of the oil zone; while in the second, the wellbore is located above the bottom
of the oil zone. Both the critical case and the subcritical case were studied for the four
systems. The resulting solutions show that the critical oil production rate is proportional
to the conductivity and thickness of the oil reservoir and the density contrast between oil
and the cresting fluid. This critical oil rate is also a function of the wellbore location in
the oil reservoir. Example calculations using the analytical solutions are compared with a
numerical reservoir simulator and an agreement is indicated. These solutions provide an
approximate approach to evaluating the performance of horizontal weUs.
- m -

TABLE OF CONTENTS
ABSTRACT ii
1. INTRODUCTION 1
2. LITERATURE REVIEW 3
3. MECHANISM OF INTERFACE CRESTING 10
3-1. Critical Oil Rate 10
4. STATEMENT OF THE PROBLEM 14
4-1. Assumptions 14
4-2. Governing Equation 14
4-3. Boundary Conditions 15
5. SOLUTIONS TO WATER-OIL CRESTING SYSTEMS 17
5-1. Wellbore at the Roof of the Reservoir, Critical Case 17
5-2. Wellbore at the Roof of the Reservoir, Subcritical Case 25
5-3. Wellbore below the Roof of the Reservoir, Critical Case 32
5-4. Wellbore below the Roof of the Reservoir, Subcritical Case 39
6. SOLUTIONS TO GAS-OIL CRESTING SYSTEMS 48
6-1. Wellbore at the Bottom of the Reservoir, Critical Case 48
6-2. Wellbore at the Bottom of the Reservoir, Subcritical Case 56
6-3. Wellbore above the Bottom of the Reservoir, Critical Case 63
6-4. Wellbore above the Bottom of the Reservoir, Subcritical Case 71
7. RESULTS 80
7-1. Definitions of Dimensionless Variables 80
7-2. The Critical Oil Rate 81
7-3. Location of the Crest 82
- iv-

8. COMPARISON WITH NUMERICAL SIMULATION 83
8-1. Introduction to the Numerical Model 83
8-2. Validation of the Numerical Model 83
8-3. Sensitivity Runs the Numerical Model 84
8-4. Comparison of the Analytical Solution and Simulation 85
9. DISCUSSIONS 86
9-1. Anisotropy 86
9-2. Capillarity and Relative Permeability 88
9-3. Well Bore Condition 89
9-4. The Critical Crest Height at the Cusp Point 90
9-5. Solution Justification 91
10. CONCLUSIONS 96
11. SUGGESTIONS FOR FUTURE RESEARCH 98
12. NOMENCLATURE 99
13. REFERENCES 102
APPENDIX A. METHOD OF SOLVING THE PROBLEMS 107
APPENDIX B. SOURCE CODE OF THE NUMERICAL SIMULATOR 112
APPENDIX C. DATA FILES FOR THE NUMERICAL SIMULATOR 129
— V -

LIST OF TABLES
Table 8.1 - Relative Permeabilities, Normalized 83b
Table 8.2 - Helder Field Parameters, Well A5(RD) 83b
Table 8.3 - Simulation Input Data and Results 85a
— VI —

LIST OF FIGURES
Figure 2-1 - Computed critical rates
Figure 3-1 - Water-cresting for a high pressure gradient case
Figure 3-2 - Water-cresting for a low pressure gradient case .,,.lib
Figure 4-1 - Irregular boundaries in a water cresting system , 15a
Figure 4-2 - Irregular boundaries in a gas cresting system ,,,,16a
A
Figure 5-1 - Mappings of flow Domain for a water cresting system (Case 1) 17a
Figure 5-2 - Mappings of flow Domain for a water cresting system (Case 2) 25a
Figure 5-3 - Mappings of flow Domain for a water cresting system (Case 3) 32a
Figure 5-4 - Mappings of flow Domain for a water cresting system (Case 4) 39a
Figure 6-1 - Mappings of flow Domain for a gas cresting system (Case 1) .... 48a
Figure 6-2 - Mappings of flow Domain for a gas cresting system (Case 2) 56a
Figure 6-3 - Mappings of flow Domain for a gas cresting system (Case 3) .... 63a
Figure 6-4 - Mappings of flow Domain for a gas cresting system (Case 4) ....71a
Figure 7-1 - Solution of critical rate (wellbore at the roof of the reservoir) ,,,,81a
Figure 7-2 - Solution of critical rate (wellbore below the roof of the reservoir) ,81b
Figure 7-3 - Location of critical crest (wellbore at the roof of the reservoir)
Figure 7-4 - Location of critical crest (L^ = 0.5) , , 82b
Figure 7-5 - Location of critical crest (Ly, = 0.7) 82c
Figure 7-6 - Location of critical crest {L^j = 0.9) , 82d
Figure 7-7 - Location of crest (wellbore at the roof of the reservoir) 82e
Figure 7-8 - Location of crest {L^ —1.0) 82f
Figure 7-9 - Location of crest {L^ —0.9) 82g
Figure 7-10 - Location of crest {Lro —0.8) .... 82h
Figure 7-11 - Location of crest —0.7) 82i
Figure 7-12 - Location of crest {Ly, = 0.6) 82j
Figure 7-13- Location of crest (Ly, - 0.5) .... 82k
Figure 7-14- Location of crest (Ly, —0.4) 821
Figure 8-1 - Simulation grids for a horizontal-well-penetrated reservoir 83a
- vii-

CHAPTER 1
INTRODUCTION
The production of oil through a vertical well that penetrates an oil layer underlain
by water or overlain by gascap gas causes the oil-water or gas-oil interface to deform into
a cone shape. As the production rate is increased, the height of the water cone above the
original oil-water contact or the depth of the gas cone below the original gas-oil interface
also increases until, at a certain production rate, the cone becomes unstable and the coning
fluid flows into the well. The maximum water-free or gas-free oil production rate is called
the critical oil rate.
One of the reasons for drilling horizontal wells is to enhance the oil production rate
in those areas where the water or gas breakthrough is a severe problem in vertical wells.
However, the encroachment of the water or gas is still a limitation for further improving
oil production rate in horizontal wells, especially for some cases where the thickness of
the oil reservoir is small. Determination of the critical oil rate is a very practical problem
for horizontal well evaluation. It is also of vital importance to know the location of the
crest-shaped interface for evaluating the oil recoveryfrom horizontal wells and determining
the crest subsidence time. Since horizontal wells have been drilled commercially in the
oil industry only in recent years, very few studies have been reported about the behavior
of the unwanted fluid encroachment, and conflicting results have been given by different
investigators. Therefore, this problem needs to be reinvestigated.
The encroachment of the unwanted fluid is referred to as interface cresting through
out this thesis. In some figures, the cross section of the water or gas crest is referred as
- 1 -

- 2 -
cone since it looks like a cone. In this investigation, the mechanism of the water cresting
process is analyzed graphically. This analysis shows that a stable water crest exists right
below the wellbore if the pressure gradient beneath the wellbore is lower than the hydro
static pressure gradient of water. If the pressure gradient beneath the wellbore is higher
than the hydrostatic pressure gradient of water, an unstable water crest exists.
A line-source horizontal wellbore is assumed and conformal mapping theory is em
ployed to solve the interface cresting problems under steady state flow conditions in this
study. The critical oil production rates and interface locations for two water-oil cresting
systems and two gas-oil cresting systems are determined analytically. The difference be
tween the two water-oil cresting systems is the different positions of wellbores in the oil
reservoirs. The wellbore is placed at the roof of the oil reservoir in the first system and
below the roof of the oil reservoir in the second system. This same difference exists in
the two gas-oil crest systems. However, in the first gas-oil cresting system, the wellbore is
placed at the bottom of the oil reservoir; while in the second, the wellbore is placed above
the bottom of the oil reservoir. Both the critical case and the subcritical case were solved
for the four systems. The solutions are presented in terms of dimensionless variables.

CHAPTER 2
LITERATURE REVIEW
The interface coning problem in vertical wells was first investigated in 1930's.
Muskat and Wyckoff [1935] presented an analysis of water-coning more than fifty years
ago. Their results indicate the existence of a critical cone height which, for the particular
system represented by their electrical conduction models, is in the vicinity of 76 % per
cent of the total distance between the bottom of the well and the normal water level.
Muskat concluded in his work (Muskat [1946]) that this critical cone height is about 60 %
to 75 % of that distance. Because of the difficulty of the simultaneous determination of
the pressure distribution and the shape of the cone, they did not give an explicit solution,
instead, their method consisted of a tedious graphic procedure which yielded the critical
oil rate. Their theory gives a critical oil rate which is too high (Schols [1972]) because they
assumed that the pressure distribution for the water-coning system is effectively the same
as that for the case where there is no cone and the oil is flowing in a sand between two
parallel impermeable boundaries and flowing into a well partially penetrating the sand.
Meyer and Garder [1954] came up with an approximate equation assuming radial
flow. They derived a simple formula giving the maximum theoretical flow rate into a well
under the condition that no water would be produced, with consideration of the existence
of water-cone. This maximum theoretical flow rate is referred to as the production rate
at which stable cone reaches the bottom of the well. This rate can be taken as the critical
rate only for cases where the conductivities of the sands are very high. Moreover, since
they assumed that radial flow prevails, their results are too low in value (Schols [1972]).
- 3 -

-4-
Chaney et al. [1956] developed a set of curves by which maximum water free pro
duction rates can be determined for wells having a gas-oil contact, water-oil contact, or
both, which are based on Muskat's mathematical analysis and potentiometric analyzer
study.
Karp et al. [1962] analyzed the horizontal barriers for controlling water-coning
experimentally and theoretically based on Muskat's theory and Meyer's theory.
Chierici [1964] presented an approach to determination of the maximum permissible
oil rate without water or gas production starting from Muskat's theory and using the
potentiometric model technique.
Welge and Weber [1964] presented a 2-D method for calculating water coning be
havior. Their computer output matched coning behavior of the laboratory sandpacked
model and of several producing wells experiencing water or free gas production by coning.
Sobocinski and Cornelius [1965] presented a correlation for predicting the behavior
of water cone as it builds from the static water oil contact to breakthrough conditions.
The correlation was based on a limited amount of experimental data from a laboratory
sandpacked model and on results from a computer program for a 2-D incompressible
system.
Wheatley [1985] presented a 3-D approximate theory of water-coning. He considered
the effect of existence of cone on the pressure distribution in such a way that a uniform
pressure distribution in a sand for a pure radial flow case is modified by superposition of
line and point source flow strengths. The critical flow rate can be obtained, according to
his theory, by trial and error (iteration) technique. His approximate approach is good for
values of dimensionless drainage radius in the range of 2 to 10.
Hoyland et al. [1986] presented two methods for predicting critical oil rate in
anisotropic formations with well completed from the top of the formation. One is an
analytical solution, and the other is a numerical simulation. Their analytical solution is
similar to that of Muskat's but the assumption of uniform flux at the wellbore was re
placed by that of an infinitely conductive wellbore. The pressure distribution function

- 5 -
they used was given by Papatzacos [1987]. However, they still assumed that the potential
distribution in the oil zone is unperturbed by the water cone.
Dagan and Bear [1968] studied the salt-fresh water interface coning problem. They
concluded that the critical cone height is 1/3 to 1/2 of the distance between the bottom
of the well and the normal interface.
In all the above mentioned investigations, the effect of limited entry of the wellbore
on the oil productivity of the well was not taken into account. Therefore, according to
their theories, the maximum water-free production rate would be obtained when wellbore
penetration is zero, which is physically impossible.
Abass and Bass [1988] studied the performance of water coning under different
boundary conditions analytically, numerically and experimentally. In their study a fully
implicit, strongly coupled mathematical model was used to treat rapid pressure-saturation
change problems. On the other hand, a plexiglass model was constructed to obtain qual
itative and quantitative descriptions of water coning phenomenon. According to their
experimental study, there is no critical oil rate for the real case. However, they derived an
analytical solution for calculating the water free oil rate for steady state and pseudosteady
state flow conditions in 2-D radial flow systems using average pressure concept. Although
the adoption of their 2-D radial flow assumption and average pressure concept are not
very apropos for water coning systems, they were the first group of investigators who took
into account the effect of limited entry of wellbore on the maximum available water-free
oil rate. According to their solution, the optimum fractional wellbore penetration interval
(completed from the top of the formation) should be 0.5 in oil-water coning systems.
Yang and Wattenbarger [1991] present two correlation methods for water coning
calculations based on numerical simulation.
Although the critical oil rate was shown to exist analytically (Muskat [1935], Wheat-
ley [1985], Hoyland [1986]) and wasobservedexperimentally by someinvestigators (Henley
[1961], Sobocinski [1965], Khan [1972], Dagan [1968]), it was not observed in certain sit
uations (Abass [1988]).

- 6 -
Guo and Lee [1992] presented an approach to optimization of the completion in
terval in oil-water coning systems. Their graphical analysis explained why sometimes the
unstable water cone and the critical rate defined from it do not exist. According to their
theory, the maximum water-free production rate can be obtained for an optimum wellbore
penetration which is less than one-third of the pay zone thickness but greater than zero.
In summary, the interface coning in vertical wells is a problem whose analytical
solution is known to be difficult because the shape of the cone is not known a priori and
is part of the required solution. A number of investigators (Muskat [1935], Meyer [1954],
Chaney [1956], Karp [1962], Rechardson [1971], Bournalzel [1971], Wheatley [1985], Hoy-
land [1986], Piper [1987], Abass [1988]) have studied this coning behavior analytically.
Some authors (Welge [1964], Blair [1969], Letkman [1970], Woods [1975], Chappelear
[1976], Trimble [1976], Abass [1988]) studied the water-coning problem by numerical sim
ulation, while others (Henley [1961], Karp [1962], Sobocinski [1965], Khan [1970], Bor-
rnalzel [1971]) studied this problem through experiments. Although many researchers
have studied this coning behavior while determining the critical oil rate, their results are
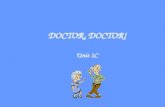
frequently conflicting. Fig. 2-1 is from Guo and Lee [1992]. It shows the comparison of
critical flow rates given by six investigators. Since the eifect of limited entry of wellbore on
the oil productivity of the well was not taken into account in the critical rate calculations
in the first four investigations, all four curves in the figure show that the maximum water-
free production rate would be obtained when the wellbore penetration is zero, which is
physically impossible. The differences between the calculated critical flow rates given by
the four methods are quite large because they made different assumptions to simplify the
problem.
The idea of using horizontal wells to increase the area of penetrated reservoir dates
back to the early 1940's (Ranney [1941]). Considerable effort was directed toward horizon
tal drilling during the 1950's and 1960's, mostly in the USSR. Until early of 1980's, very
few horizontal weUs had been drilled in western countries. The current focus on horizontal
well production resulted from the combined effects of improvements in directional-drilling
and the need for new oil. Since Stramp [1980] reported that two horizontal wells were

Qc,
rb/d
ay
15
01
-3 00
.2
Mu
sk
at
Wh
eatl
ey
Sch
ols
-B
-M
ey
er
&G
ard
er
Ab
ass
&B
ass
Gu
o&
Lee
K=
1d
rw=
0.2
5ft
H=
60
ft>U
o=1
cp
Ar
=1
5Ib
/c.f
t
re
=5
00
ft
0.4
0.6
0.8
1
Dim
en
sio
nle
ss
Well
bo
reP
en
etr
ati
on
Fig
.2
-1—
Co
mp
ute
dcr
itic
aloi
lra
te
1.2
o>
0)

- 7-
drilled in the Empire Abo Unit in New Mexico in order to reduce gas coning tendencies,
the number of horizontal wells has increased rapidly every year. For the general use of
horizontal wells in industry, Sherrard et al. [1987] reported drilling techniques and testing
results from several horizontal wells.
Production behavior of some horizontal weUs were reported by Reiss [1987], Bro-
man [1990], and Murphy [1990]. Pressure Transient Analysis and inflow performance for
horizontal wells were investigated by Goode [1987] and Kuchuk et al. [1988].
Chaperon [1986] studied the behavior of coning toward horizontal weUs in an
anisotropic formation assuming constant interface elevation at a finite distance. Her ap
proach is identical to the well known approach used by Muskat, equilibrium conditions
are stated first. This approach requires expression of the viscous flow potential pertinent
to the geometry of the flow created by a horizontal well. However, as in Muskat's ap
proach, the presence of the immobile crest which reduces the cross section was not taken
into consideration in Chaperon's solution. Since she neglected the flow restriction due to
the immobile water in the cone, her theory should give an overly optimistic evaluation of
critical rate.
Assuming the horizontal well is situated near the roof of the reservoir for the lateral
edge drive and the bottom water drive cases, Giger [1986] presented analytical 2-D models
of water cresting before breakthrough for horizontal wells. Since he used the free surface
boundary condition (velocity directed toward the surface at a given distance) and assumed
that the free surface is at a large distance, the oil height in the models is difficult to choose.
In fact, he showed that the interface is tilted with an asymptotic parabolic shape, which
means that nowhere does it tend to its initial shape, but instead, at some distance from
the well, it drops lower than initial water-oil-contact, as low as noiinus infinity. Although
these mathematical solutions were modified by the author, he still suggested that these
solutions not be used for small values of dimensionless drainage radius. In fact, an ideal
solution similar to Giger's solution was also given by Efros [1963] in the early sixties. But
again, this cannot be used in practice.

- 8 -
Kuchuk et al [1988] analyzed the pressure transient behavior of horizontal weUs
with and without a gas cap or aquifer. They considered the irregular two-phase boundary
(cone-shaped interface) as a constant pressure boundary and assumed that the gravity
effect is negligible and the viscosity of fluid is constant throughout the medium. According
to their solution, the existence of a gas or water crest does not aifect the pressure response.
Ozkan and Raghavan [1988] investigated the time-dependent performance of hori
zontal wells subjected to bottom water drive. They assumed the reservoir boundary at
the top of the formation and the boundaries at the lateral extent of the formation to be
impermeable, and that an active aquifer at the bottom of the reservoir would yield an
effect identical to that of a constant pressure boundary located at the original water-oil
contact. The most unacceptable assumption they made is that the mobility of water in
the flooded portion of the oil zone (water in water-crest) is the same as the mobility of the
oil. Furthermore, they assumed the density difference between the oil and water is negli
gible. These two assumptions are equivalent to an assumption that the moving water-oil
interface does not exist.
Joshi [1988] investigated the well productivity of slant and horizontal weUs using
Giger's theory. Joshi [1990] also compared the results given by the above theories and
found out that they are conflicting and different by a factor as high as twenty.
Papatzacos et al. [1988, 1989] solved the two-phase cresting problem using the
moving boundary method assuming gravity equilibrium in the cones. The results in their
papers are based on new semi-analytical solutions for time development of a gets or water
cone and simultaneous gas and water cones in an anisotropic, infinite reservoir with a
horizontal well placed in the oil column. The essential assumption they introduced con
cerning gas and water is that they are, at each time, in static equilibrium. In other words,
they participate in the movement of the interface boundaries by expanding when pressure
falls, yet their flow is neglected. This assumption of compressible flow contradicts their as
sumption of incompressible flow. Their solution should be valid only in the infinite-acting
period at low rates. In their semi-analytical solution, the total value of numerical errors

(introduced by the timestep procedure, the convergence acceleration and roundoff) was
estimated to be 5 —10 percent.

CHAPTER 3
MECHANISM OF INTERFACE CRESTING
In reality, the water-oil or gas-oil interface in a porous medium is a transition zone
due to capillarity and relative permeability effects. The thickness of the transition zone
depends on the magnitude of the capillary pressure and relative permeabilities. In this
study, these effects are assumed to be negligible and an abrupt contact between water
and oil zones or between gas and oil zones are assumed to exist. A discussion is made in
Chapter 9 on this assumption.
Water-oil-interface cresting (water cresting) is the process by which water in an
underlying aquifer is sucked up against the forces of gravity into production perforations
in the oil zone. Similarly, with an overlying gas cap one may experience gas-oil-interface
cresting (gas cresting). For convenience, only water cresting is treated in this chapter. All
results can be translated to cover gas cresting.
3-1. Critical Rate
In a steady state flow condition, a constant production rate causes a constant pres
sure drawdown at every point within the constant potential boundaries, which results in
a stable potential distribution in a reservoir. When the oil production rate and pressure
at the outer boundary are fixed, the spatial variation (distribution) of pressure in the
reservoir is a function of the conductivity, which is defined as the permeability of reservoir
rock divided by the viscosity of the flowing fluid in the reservoir. In this section, we study
- 10 -

-li
the change in height of the crest between two steady state flow conditions. The transient
flow between the two steady state flow conditions is not dealt with in this investigation.
In water cresting systems, the pressure drawdown causes water at the bottom of the
oil zone to rise to a certain height at which the upward force is balanced by the weight of
water beneath this point. As the lateral distance from the wellbore increases, the pressure
drawdown decreases, so, the height of the balance-point decreases. Therefore, the locus
of the balance-point is a stable crest-shaped water oil interface when the production rate
is less than a certain value. Oil flows above the water-oil interface, while water remains
stationary below the interface.
Figures 3-1 and 3-2 are schematic diagrams used for interpreting the mechanism
of water cresting. Figure 3-1 illustrates the high pressure gradient case, and the low
pressure gradient case is shown by Figure 3-2. In both of the figures, the stabilized
pressure distribution along the vertical direction beneath the wellbore is plotted on the
right. The line A—B represents the pressure distribution in the oil zone when the oil flow
rate is zero (stationary oil pressure), and the line B—C represents the pressure distribution
in the water crest (stationary water).
In a system represented in Fig. 3-1, if the oil flow rate is increased from zero to
Qoi, the flnal stabilized oil pressure distribution curve corresponding to the flow rate Qoi
is represented by the curve marked "Qoi". This curve intersects the line B-C at one
point. The height of this point from the original water-oil-contact is the height of the
stable crest 1. If the oil flow rate is increased from Qoi to Qo2i the final stabilized oil
pressure distribution curve corresponding to the flow rate Q02 is represented by the curve
marked "^02"* curve intersects the line B-C at two points. The height of the lower
point from the original water-oil-contact is the height of the stable crest 2. If the oil
flow rate is increased from Q02 to the final stabilized oil pressure distribution curve
corresponding to the flow rate Q03 is represented by the curve marked "Q03". This curve
intersects the line B-C at point D. The height of point D from the original water-oil-
contact is the height of the stable crest 3. Now the flowing pressure gradient above point
D is every where higher than the hydrostatic water pressure gradient represented by line

unstable /cone
cone 3
cone 2
cone 1
Qo1 < Qo2 < Qo3 = Qocr
Fig. 3-1 - Water-coning for a higli pressure gradient case
- lla -

Qo3 > Qo2 > Qo1
cone 3
cone 2
cone 1
Fig. 3-2 - Water-coning for a low pressure gradient case
- lib -

- 12 -
B-C. If the oil flow rate is further increzised, no more stable crest can be established. Even
a slight increase in oil rate above Qo^ can cause the stable crest 3 to become unstable and
water will flow into the wellbore. The maximum water-free production rate {Qoz) is called
critical rate which is denoted as Qocr in Fig. 3-1.
In a system shown in Fig. 3-2, if the oil flow rate is increased from zero to Qoi,
the final stabilized oil pressure distribution curve corresponding to the flow rate Qoi is
represented by the curve marked "Qoi"- This curve intersects the line B-C at one point.
The height of this point from the original water-oil-contact is the height of the stable
crest 1. If the oil flow rate is increased from Qoi to Q02, the final stabilized oil pressure
distribution curve corresponding to the flow rate Q02 is represented by the curve marked
"Qo2"- This curve still intersects the line B-C at one point. The height of this point
from the original water-oil-contact is the height of the stable crest 2. If the oil flow rate is
increased from Q02 to the final stabilized oil pressure distribution curve corresponding
to the flow rate Q03 is represented by the curve marked "Q03". This curve intersects the
line B-C at bottom of the wellbore. The height of the stable crest 3 equals the thickness
of the oil zone. In this system, no unstable water crest exists. The maximum water-free
production rate, or critical rate, is Qoa-
In summary, if the reservoir conductivity is high, the flow resistance of rock to
flowing oil is low and the wellbore pressure cannot be dropped below the hydrostatic water
pressure of the system before water breakthrough into the well occurs. Therefore, the final
stabilized oil pressure distribution curve intersects the water pressure distribution line at
only one point. The height of the intersection point is the height of stable water crest if
capillary pressure is negligible. When the wellbore pressure is dropped to the hydrostatic
water pressure of the system due to the increased flow rate, the stable crest contacts the
bottom of the wellbore. However, if the reservoir conductivity is low, the resistance of the
rock to flowing oil is high and the wellbore pressure can be dropped below the hydrostatic
water pressure of the system before water breakthrough into the well occurs. In this case
the flnal stabilized oil pressure curve can intersect the water pressure distribution line at
two points. The height of the lower intersection point is the height of stable water crest.

- 13 -
As production rate is increased, the pressure drawdown increases everywhere in the oil
zone. Therefore, the lower intersection point shifts upward and the upper intersection
point shifts downward until they meet at one point (point D in Fig. 3-1). The height
of this point is the maximum height of stable water crest. Since the oil pressure gradient
above this point is everywhere greater than hydrostatic water pressure gradient, a further
increase in flow rate causes the water crest to become unstable.
An example of the high conductivity case is the experiment conducted by Abass and
Bass [1988]. In their physical model, they used grooves cut on the surface of a piece of
plexiglass to simulate a porous medium. Since the conductivity of this "porous medium"
is very high (resulting in a very low pressure gradient), it was impossible for them to
observe the unstable water crest. However, for the general case in the oil reservoirs, where
the conductivities of formations are low as compared to the conductivities of man-made
porous media in laboratories, unstable crests exist at high oil production rates.

CHAPTER 4
STATEMENT OF THE PROBLEM
4-1. Assumptions
The following assumptions are made in this investigation:
1. Oil reservoir is homogeneous and isotropic,
2. Steady state flow condition prevails,
3. Capillary pressure is negligible, an abrupt interface exists,
4. The horizontal wellbore is long enough, so that a two-dimensional flow dominates,
5. The horizontal wellbore behaves like a line sink in the reservoir,
6. Fluids are of constant and known properties.
Discussions on these assumptions will be given in Chapter 9 in detail.
4-2. Governing Equation
Oil is a slightly compressible fluid. Oil flow through a homogeneous porous medium
under a steady state flow condition is governed by Laplace's Equation. Laplace's equation
is expressed as
vv = 0 (4-1)
- 14-

- 15 -
where the Laplacian operator in Cartesian system is
dx
d<i>
V' =^ +^. (4-2)dx^ dy^ '
The velocity potential, in Eq. (4-1) is defined as
<i>=~{po9y + p) (4-3)H-
where
X= lateral distance, ft [M]
y = vertical distance, ft [M]
k = isotropic permeability of oil reservoir, md
y. = viscosity of oil, cp [mPa-s]
po = density of oil, Ibm/ft^ [gram/cm^]
g = 980 cm/s^ = 32/</5^, gravitational acceleration
p = pressure, psi [Pa].
4-3. Boundary Conditions
It should be noted that although the boundary conditions are stated in this section
in terms of velocity potential, they are not applied in this form when conformal mapping
theory is employed. In fact, instead of velocity potential, only the location of the oil-water
and oil-gas interfaces are solved in the investigation.
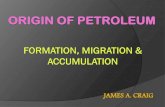
Figure 4-1 illustrates a cross section of an oil reservoir underlain by a water zone.
The wellbore is treated as a line sink and assumed at point E. The boundary conditions
of oil flow in the water-oil cresting system are described as below:
d<f> =00, for X = 0, y = ys, (4 - 4)
d(f>= 0, for x = 0, (4-5)
= 0, for y = yAF, (4 - 6)dy

y//////////////////////
////
)^^
////
///////
Vx
=q
/2d
AB
CD
Flo
win
gO
il
ui
Sta
tio
nary
Wate
r
77
77
77
77
77
77
77
77
77
77
77
77
77
77
77
77
77
77
77
77
7
Fig
.4
-1~
Irre
gu
lar
bo
un
dari
es
ina
wate
rcre
stin
gsy
stem

- 16 -
Tx =h = (4-7)where
q = flow rate per unit length of wellbore, bbl/day/ft [M^/s/M]
d = thickness of oil reservoir, ft [M].
The difficulty in treating the interface boundary A-B-C-D is that its shape is flow rate
dependent and unknown. However, the velocity potential along the water-oil interface
may be expressed as
k<i> = --{po9y + P), for y = vabcD' (4 - 8)
Since Fig. 4-1 shows that p = —pw9y for y = yABCDt Eq. (4-8) becomes
kg^p . /. /vN(l> = y, for y = yABCD, (4 - 9)
where Ap = py,—po is the density difference between water and oil in reservoir conditions.
The cross section of an oil reservoir overlain by a gascap gas zone is shown in Fig.
4-2. The wellbore is again treated as a line sink and assumed at point E. The boundary
conditions of oil flow in the gas-oil cresting system are also given by Eq. (4-4) through Eq.
(4-7) except for the gas-oil interface boundary. However, the corresponding parameters
are shown in Fig. 4-2. The velocity potential along the gas-oil interface may be expressed
as
k<!> = —{PoQy + p), for y = yABCD' (4 - 10)
Since Fig. 4-2 shows that p = -pgQy for y = yABCD-, Eq. (4-10) becomes
kgAp -(f>= for y = yABCD, (4-11)
where A/? = p^ —pg is the density difference between oil and gas in reservoir conditions.

////////////////////
X
AB
CD
sta
tio
nary
Gas
Vx
=q
/2d
Flo
win
gO
il
Fig
.4
-2~
Irre
gu
lar
bo
un
dari
es
ina
gas
cre
stin
gsy
stem
o>
(U

CHAPTER 5
SOLUTIONS TO WATER-OIL CRESTING SYSTEMS
In this chapter, four cases in two water-oil cresting systems are studied, and the
critical oil rates and locations of the water-oil interfaces in the two systems are determined.
Case 1: Wellbore is located at the roof of an oil reservoir: critical case as shown in
Fig. 5-l(a).
Case 2: Wellbore is located at the roof of an oil reservoir: subcritical case as shown
in Fig. 5-2(a).
Case 3: Wellbore is located below the roof of an oil reservoir: critical case as shown
in Fig. 5-3(a).
Case 4'' WeUbore is located below the roof of an oil reservoir: subcritical case as shown
in Fig. 5-4(a).
The conformal mapping method is employed in solving the water-oil-interface cresting
problem. This method is discussed in Appendix A.
5-1. Wellbore at the Roof of an Oil Reservoir, Critical Case
5-1-1. Flow Domain in Physical Plane z = x + iy
Since the flow region in physical plane is symmetric, only half of the flow region,
as shown in Fig. 5-1(a), is studied. Point D is a. sink which represents the cross section
- 17-


- 18 -
of horizontal wellbore. The wellbore is treated as a line-sink. Other boundary conditions
were discussed in Chapter 3.
5-1-2. Flow Domain in Hodograph Plane i/ = Vx-\- iVy
Mapping of the flow domain in the hodograph plane is based on the mapping of the
domain in physical plane.
At point Ay Vx = qc/2d and Vy = 0, so point A is located at point (qc/2d,0) in the
hodograph plane.
At point ByVy = 0. According to Eq. (A-8) Vx = 0. Hence, point jB is a stagnation
point, and it should be located at origin in hodograph plane.
The mapping of boundary B - C is a, semicircle according to Eq. (A-8).
Since point D represents a cross section of line-sink, the velocity at the point is
assumed to be infinite. If we denote Db and Di as two points approaching point D from
below and from the left of point D, respectively, we may obtain that = 0, Vy = +oo at
point Db and Vjp = oo, Vj, = 0 at point Di.
Straight boundaries in physical plane are mapped onto the hodograph plane as
straight lines.
Based on the above analysis, the flow domain in hodograph plane is mapped in
Fig. 5-l(b). Comparison of Fig. 5-1(a) and Fig. 5-l(b) shows that the mapping from
physical plane to the hodograph plane is not conformal, but isogonal.
5-1-3. Flow Domain in a Modified Hodograph Plane e =
Because of the inconformity of mapping from the physical plane to the hodograph
plane, we need to modify the hodograph plane to use conformal mapping theory. Among
many transformations, the following one may be utilized to obtain the conformity:
. -a£ = ot-\- ip =^1 +

- 19 -
= (5-1-0)Vx - tVy
This transformation is chosen because it simply relates to the flow domains represented
in the z—plane and in the ft-plane through Eq. (A-5) in Appendix A. In fact, combining
it with Eq. (A-5) givesdO. i
from which one obtains
dz = —ied^. (5-1-1)
Eq. (5-1-1) is the fundamental equation for the solution of our problem.
Using Eq. (5-1-0), the flow domain in hodpgraph plane is mapped onto the modified
hodograph plane (e-plane) as shown in Fig. 5-l(c).
5-1-4. Flow Domain in Complex Potential Plane ft = ^ -f-
Since the value of velocity potential <j> is relative, it does not matter where we map
each point of flow boundary on the complex potential plane, as long as these points are
arranged in such an order as to follow one direction on a stream line. Choosing the
stream function as zero along the lower boundary of the flow domain in physical domain
arbitrarily and assuming the velocity potential at point B is zero, we map the flow domain
in the complex potential plane as shown in Fig. 5-1(d).
5-1-5. Flow Domain in a Intermediate Plane §? = i -|- is
Since it is difficult to directly relate the flow domain represented in the modified
hodograph plane and that in the complex potential plane, we may indirectly relate them
through a third plane. We can first map the flow domains represented in both of the
two planes to the upper half of a intermediate plane by two transformations and then
combine the two transformations. The flow domain represented by the upper half of the
intermediate plane, ^ = t + is^ is shown in Fig. 5-l(e). In the figure, = -l^ts = 0
and tc = oo are chosen arbitrarily.

20 -
5-1-6. Transformation Between e-Plane and Plane
The transformation between £—plane and plane may be obtained by employing
the Transformation of Schwarz and Christoffel:
e=Aj(n- +B. (5-1-2)Since we have chosen to ——= 0 and tc = oo, Eq. (5-1-2) may be simplified as
'•"Jim*'which can be integrated along the real axis as
£ = Alnl 1 +B. (5-1-4)/ \/t + 1 - 1\
x\Zr+T-t-1/
To determine the constant A, we examine the change in e at point B:
For t <tB = 0, one has
Vi+T-lVvrri+iy
For t>tB = Oi
=lnV%/<TT+iy VF+T+I
Therefore the change in e at point according to Eq. (5-1-4), is
Vt+T 1
-v/T+T—1
Ae = i4(i0 —27r)
= —iwA.
Yet the mapping on the £—plane shows
hence,
or
A£ = -kgAp'
kgAp
A = -
= —iirA,
tfi
irkgAp'
-|- iT.
-I- iO.
(5-1-5)

- 21 -
Substitution of Eq. (5-1-5) into Eq. (5-1-4) gives
ifie = -
irkgAp \\/r+T-i-1/
To determine the constant B, apply Eq. (5-1-6) at point D:
from which one obtains
e =
0 = -ifi
irkgAp
kgAp
B = -kgAp'
Substituting Eq. (5-1-7) into Eq. (5-1-6) gives
\yjt -f 1 -1- 1/
(5-1-6)
(5-1-7)
(5-1-8)
5-1-7. Transformation Between ft-Plane and 3I?-Plane
The transformation between ft-plane and K-plane may be again obtained by em
ploying the Trsinsformation ofSchwarz and Cbristoffeh
fl =AJiU - + (5-1-9)Since we have chosen = —1,^5 = 0 and tc = oo, Eq. (5-1-9) may be simplified as
- (5-1-1.)
ft =+
which can be integrated along the real axis as
A
+ B
1^(—)1 vt+iy+ B.
To determine the constant A, we examine the change in ft at point A:
For t < tA,
For t > tAy
t-tA
^ + 1
t-tA
t-\-l
4- ITT.
-1- iO.
(5-1-11)

- 22 -
Therefore the change in Q at point A, according to Eq. (5-1-11), is
A^ i4 , . . AAft = -—-^(lO —ir) = —ZTT
hence
or
t>l + l
But the mapping on the ft plane shows that
Aft = -2 '
2 <^ + 1
9c
^>1 + 1
U +1 27r
Substitution of Eq. (5-1-12) into Eq. (5-1-11) gives
ft = —In -H B.27r V <+ 1 y
To determine the constant 5, apply Eq. (5-1-13) at point Bi
Qc0 =
from which one obtains
Substituting Eq. (5-1-14) into Eq. (5-1-13) gives
Sl=^]n2ff L«^(i + l)J
(5 - 1 - 12)
(5 - 1 - 13)
(5 - 1 - 14)
(5 - 1 - 15)
5-1-8. Solution to Water-Oil Interface, Critical Oil Rate
The solution of water-oil interface can be obtained solving Eq. (5-1-1). Differenti
ating Eq. (5-1-15) gives
= T-^ dt. (5 - 1- 16)2ir\t-tA t + lj ^ '
Substitutions of Eq. (5-1-8) and Eq. (5-1-16) into Eq. (5-1-1) gives
dz = —2TkgAp
-In '̂̂ '̂ ZI—) - i] (— ) dt..TT vvm+1/ . \t-tA t+ij (5-1-17)

- 23 -
To solve the water-oil interface, we need to separate the imaginary part from this complex
equation.
Between points B and C, < > 0, so
VVi+T+l/
The imaginary part of Eq. (5-1-17) is then
dy = (— dt. (5 - 1- 18)^ 2Trkgl^^p\t-tA ^ ^
The height of water crest (he) can be obtained by integration of Eq. (5-1-18):
y
hc =y-yB =j dyVB
= / Mc (I l_\.J 2irkgAp\t-tA t+l)
(5 - 1 - 19)
ta
t-tAIn
2TrkgAp
At the cusp point C, t approaches infinity. The height of the water crest {He) is
To determine the constant tA, one can apply Eq. (5-1-8) at point A:
(5 - 1 - 21)
L-«A(t+l).
.2d _ ngc kgb.p
Solving Eq. (5-1-21) for Ia gives
ri /ym-n itir \^/i7TT+lJ
where
c„, = exp . (5-1-23)
Assuming the dimensionless critical-crest-height is HcDi the real critical-crest-height
JIc is then Hcd^- Therefore, the critical oil production rate for unit length of wellbore,
according to Eq. (5-1-20), is2TllaDdkgAp
Mln(=b) •

- 24-
Substitution of Eq. (5-1-22) into Eq. (5-1-24) gives
-2TrHDdkgAp9c =
/^In ~(i+fe)(5-1-25)
However, since C^i in Eq. (5-1-25) is still a function of gc? we must solve for Qc
using a numerical method (see Chapter 7).
The real part of Eq. (5-1-17) is
(5-1-26)27r2A;flrAp \<-H 1 t-tAj \y/tTT-\-lJ
which can be integrated as
Now, Eq. (5-1-27) can now be integrated numerically.
The height of water crest, given by Eq. (5-1-19) can be plotted versus lateral
distance, x, given by Eq. (5-1-27) with parameter t. The plot gives the location of the
water-oil-interface (see Chapter 7).
Eq. (5-1-24) indicates that the critical rate is a function of critical crest height at
the cusp point which is an unknown variable. This limits the application of the theory.
Theoretically, this can be avoided. In fact, Eq. (5-1-19) shows that at the outer boundary
where the crest is null, the parameter t takes a value of zero. Substituting t = 0 into the
upper boundary of the integral in Eq. (5-1-27) yields
Theoretically, the critical rate (gc) can be numerically solved by coupling Eq. (5-1-28)
and Eq. (5-1-23). However, it is found that the integral converges extremely slowly. It
may be impossible to numerically solve these two equations using the currently available
computers. Therefore, Eq. (5-1-24) has to be used for determining the critical rate.

- 25 -
5-2. Wellbore at the Roof of an Oil Reservoir, Subcritical Case
5-2-1. Flow Domain in Physical Plane z x-\-iy
Since the flow region in physical plane is symmetric, only half of the flow region as
shown in Fig. 5-2(a), is studied. Point is a sink which represents the cross section
of horizontal wellbore. The wellbore is treated as a line-sink. Other boundary conditions
were discussed in Chapter 3,
5-2-2. Flow Domain in Hodograph Plane i/ = Vx-\- iVy
Mapping of the flow domain in hodograph plane is based on the mapping of the
domain in physical plane.
At point A, Vx = g/2rf and Vy = 0, so point A is located at point (g/2d,0) in the
hodograph plane.
At points jB, Vy = 0. According to Eq. (A-8) in Appendix A v® = 0. Hence, point
is a stagnation point, and it should be located at the origin in the hodograph plane. So
is point D.
The mapping of boundary B - C - D is part of a circle according to Eq. (A-8).
Since point E represents a cross section of a line-sink, the velocity at the point is
assumed to be infinite. If we denote Eb and Ei as two points approaching point E from
below and from the left of point E^ respectively, we obtain that Vx = 0, = -}-oo at point
Eb and Vx = -|-oo, Vy = 0 at point Ei.
Another fact for hodograph mapping is that straight boundaries in physical plane
be mapped onto the hodograph plane as straight lines.
Based on the above analysis, the flow domain in hodograph plane is mapped in
Fig. 5-2(b). Comparison of Fig. 5-2(a) and Fig. 5-2(b) shows that the mapping from
physical plane to the hodograph plane is not conformal, but isogonal.

Wkgl^P

- 26 -
5-2-3. Flow Domain in a Modified Hodograph Plane £ = a +1/?
Because of the inconformity of mapping from physical plane to hodograph plane,
we need to modify the hodograph plane to use conformal mapping theory. Among many
transformations, the following one may be utilized to obtain the conformity:
+ vj
Vfc - tv.(5-2-0)
jx — n'y
This transformation is chosen because it simply relates to the flow domains represented
in 2—plane and in ft—plane through Eq. (A-5) in Appendix A. In fact, combining it with
Eq. (A-5) gives:dil _ idz ~
from which one obtains
dz = —iedn. (5-2-1)
Eq. (5-2-1) is the fundamental equation for solving our problem.
Using Eq. (5-2-0), the flow domain in hodograph plane is mapped onto the modified
hodograph plane (e-plane) as shown in Fig. 5-2(c).
5-2-4. Flow Domain in Complex Potential Plane Q = +
Since the value of velocity potential <l> is relative, it does not matter where we map
each point of flow boundary on the complex potential plane, as long as these points are
arranged in such an order as to follow one direction on a stream line. Choosing the
stream function as zero along the lower boundary of the flow domain in physical domain
arbitrarily and assuming the velocity potential at point B is zero, we map the flow domain
in complex potential plane as shown in Fig. 5-2(d).

-27-
5-2-5. Flow Domain in a Intermediate Plane U = t + is
Since it is difficult to directly relate the flow domain represented in the modified
hodograph plane and that in the complex potential plane, we may indirectly relate them
through a third plane. We can first map the flow domains represented in both of the
two planes to the upper half of a intermediate plane by two transformations and then
combine the two transformations. The flow domain represented by the upper half of the
intermediate plane, ^ = t-\- is, is shown in Fig. 5-2(e). In the figure, <£? = = 0
and to = oo are chosen arbitrarily.
5-2-6. Transformation Between £-Plane and Plane
The transformation between £-plane and 3fi-plane may be obtained by employing
the Transformation of Schwarz and Christoffek
e=Ajiit- +B. (5-2-2)Since we have chosen ts = -l,tB = 0 and to —oo, Eq. (5-2-2) may be simplified as
(S-<c)
which can be integrated along the real axis as
e = A\Vt+T+iJ.
+ B.
To determine the constant A, we examine the change in e at point B:
For t <tB = 0,
ViTT-i
For t>tB = 0,
+1 +1/
Vv^r+T-i-iy
1 "I" 1
v^+T-1
Vi+T-H
Therefore the change in s at point B, according to Eq. (5-2-4), is
+ ZTT.
+ iO.
Ae ——Atc{i^ —i^) = iirAtc-
(5-2-3)
(5-2-4)

- 28 -
But the mapping on the £-plane shows
hence,
or
ifie =
irkgAptc
To determine the constant B, apply Eq. (5-2-6) at point E:
from which one obtains
A£ = -kgAp'
kgAp= iirAtc,
tilA =
irkgAptc'
Substitution of Eq. (5-2-5) into Eq. (5-2-4) gives
2Vi+T -tchiXx/i+T 1/.
+ B.
0 =tfj,
irkgAptc[—tc ln(—1)] -f-
B =kgAp'
Substituting Eq. (5-2-7) into Eq. (5-2-6) gives
'2y/iTl 1, /\/r+T-l"e =
kgAp iirtc \ + 1 + 1 /
(5-2-5)
(5-2-6)
(5-2-7)
(5-2-8)
5-2-7. Transformation Between Jl-Plane and K-PIane
The transformation between H-plane and 32—plane may be again obtained by em
ploying the Trans{orma.tiott ofScJiwarz and Christoffel
(1 =AJ(U- )"/""'(» - +B. (5-2-9)Since we have chosen ts = -l^ts = 0 and <£> = oo, Eq. (5-2-9) may be simplified as
t^)(Ji+l)+ B (5 - 2 - 10)

- 29 -
which can be integrated along the real axis as
AQ =
+
To determine the constant A, we may examine the change in ft at point A:
For -l<t< tAj
For i > tA,
Km)- t-tA
t+1
t-tA
t + 1
+ ITT.
+ tO.
Therefore the change in ft at point A, according to Eq. (5-2-11), is
Aft = ^ (fO —tTr) =-tTT—tA + V ^ tA + 1
But the mapping onto the ft-plane shows
hence
or
An =-f,
iq . A""2 " "'''iTTT'
tyl -H 1 27r
Substitution of Eq. (5-2-12) into Eq. (5-2-11) gives
27r \t + l J
To determine the constant apply Eq. (5-2-13) at point B:
0=^lnH4) +B,
from which one obtains
Substituting Eq. (5-2-14) into Eq. (5-2-13) gives
fi = -;iln2w
'-tA{t+iy(t-tA) 1
(5-2-11)
(5-2-12)
(5 - 2 - 13)
(5-2-14)
(5-2-15)

- 30 -
5-2-8. Solution to Water-Oil Interface
The solution of water-oil interface can be obtained solving Eq. (5-2-1).
Differentiating Eq. (5-2-15) gives
dSl =-^(— dt.2t: \t-tA <+ 1/
Substitutions of Eq. (5-2-8) and Eq. (5-2-16) into Eq. (5-2-1) gives
dz =fiq
2irkgAp
To solve the water-oil interface, we need to separate the imaginary part from this complex
equation:
Between points B and D^t > 0, so
(5 - 2 - 16)
t--^VT+t)] (5-2-17). * V V«TT+1 tc ). \t-tA t + lj ^
\y/^ + 1 + 1/
The imaginary part of Eq. (5-2-17) is then
dy= M (_L27rkgAp \t-tA t + lj
The height of water crest (h) can be obtained by integration of Eq. (5-2-18):
(5 - 2 - 18)
y
=y-yB =jVb
t
-ItB
dy
2irkgApyt-tA t-j-l)m1— ]
t-tA2'KkgAp
In—tA{t -i-1)
dt
(5 - 2 - 19)
At the cusp point Z?, t approaches infinity. The height of the water crest (^) is
q kgAp
fiqH = VD - VB - 2'KkgAp
To determine the constant one can apply Eq. (5-2-8) at point A:
1 + —IT V + 1 + 1/ tc
(5 - 2 - 20)
(5-2-21)

which can be rearranged as
2d'jrkgAp 2fiq
= —VtA + 1tc
- 31 -
/1_^XVl+ v/ilTTy
(5 - 2 - 22)
The constant tA can be solved numerically from Eq. (5-2-22) if the constant ic is
known.
To determine the constant one can apply Eq. (5-2-8) at point C
kgAp kgAp
Since ic > 0, Eq. (5-2-23) can be rearranged as
/? = -irkgAp
In Eq. (5-2-24), /? is a parameter. When the oil production rate approaches the critical
rate, /3 approaches 0. For the critical case, Eq. (5-2-24) becomes
1+i [in f Vte+r"TT _ \y/^C + 1 + 1/ ic
from which tc can now be solved numerically.
The real part of Eq. (5-2-17) is
fiq
(5 - 2 - 23)
(5 - 2 - 24)
(5 - 2 - 25)
dx =2'ir'̂ kgAp
which can be integrated as
^ vT+t)] f— (5-2-27)Jo2ir^kgApl\ VT+T+l tc /Jv' + l i-iAj
Now, Eq. (5-2-27) can be integrated numerically.
The height of water crest, h, given by Eq. (5-2-19) can be plotted versus lateral
distance, x, given by Eq. (5-2-27) with parameter t. The plot gives the location of the
water-oil-interface (see Chapter 7).
—i-—vm) (5-2-26).\ y/t + 1+1 tc /. + 1 t —tA/

- 32 -
5-3. Wellbore Below the Roof of an Oil Reservoir, Critical Case
5-3-1. Flow Domain in Physical Plane z = x-\-iy
Since the flow region in physical plane is symmetric, only half of the flow region,
as shown in Fig. 5-3(a), is studied. Point D is sink which represents the cross section
of horizontal wellbore. The wellbore is treated as a line-sink. Other boundary conditions
were discussed in Chapter 3.
5-3-2. Flow Domain in Hodograph Plane i/ = Vx + ivy
Mapping of the flow domain in hodograph plane is based on the mapping of the
domain in physical plane.
At point A, Vx = qd^d and Vy = 0, hence, point A is located at point (gc/2rf,0) in
the hodograph plane.
At point J3,Vy = 0, Va; = 0 according to Eq. (A-8) in Appendix A. Hence, point B
is a stagnation point, and it should be located at origin in hodograph plane.
The mapping of boundary 5 - C is a semicircle according to Eq. (A-8).
Since point D represents a cross section of line-sink, the velocity at the point is
assumed to be infinite. If we denote Db and Da as two points approaching point D from
below and from above of point JD, respectively, we may obtain that = 0, Vy = -|-oo at
point Df, and v® = 0, Uy = -oo at point Da-
Another fact for hodograph mapping is that straight boundaries in physical plane
axe mapped onto the hodograph plane as straight lines.
Based on the above analysis, the flow domain in hodograph plane is mapped in
Fig. 5-3(b). Comparison of Fig. 5-3(a) and Fig. 5-3(b) shows that the mapping from
physical plane to the hodograph plane is not conformal, but isogonal.


- 33 -
5-3-3. Flow Domain in a Modified Hodograph Plane e = a +
Because of the inconformity of mapping from physical plane to hodograph plane,
we need to modify the hodograph plane to use conformal mapping theory. Among many
transformations, the following one may be utilized to obtain the conformity:
ii/£ = Q + =
Vx - tv.(5-3-0)
This transformation is chosen because it simply relates to the flow domains repre
sented in 2-plane and in ft-plane through Eq. (A-5) in Appendix A. In fact, combining
it with Eq. (A-5) givesdQ i
from which one obtains
dz = -iedQ. (5-3-1)
Eq. (5-3-1) is the fundamental equation of solving our problem.
Using Eq. (5-3-0), the flow domain in hodograph plane is mapped onto the modified
hodograph plane (e-plane) as shown in Fig. 5-3(c).
6-3-4. Flow Domain in Complex Potential Plane fl = +
Since the value of velocity potential 0 is relative, it does not matter where we map
each point of flow boundary on the complex potential plane, as long as these points are
arranged in such an order as to foUow one direction on a stream line. Arbitrarily choosing
the stream function as zero along the lower boundary of the flow domain in physical
domain and assuming the velocity potential at point B is zero, we map the flow domain
in complex potential plane as shown in Fig. 5-3(d).

-34-
5-3-5. Flow Domain in a Intermediate Plane U = t + is
Since it is difficult to directly relate the flow domain represented in the modified
hodograph plane and that in the complex potential plane, we may indirectly relate them
through a third plane. We can first map the flow domains represented in both of the
two planes to the upper half of a intermediate plane by two transformations and then
combine the two transformations. The flow domain represented by the upper half of the
intermediate plane, 3? = t + is, is shown in Fig. 5-3(e). In the figure, tA = = 0
and ts = oo are chosen arbitrarily.
5-3-6. Transformation Between e-Plane and 5?—Plane
The transformation between e-plane and 9f?-plane may be obtained by employing
the Transformation of Schwarz and Christoffel.
s=Aj(n- +B. (5-3-2)
Since we have chosen = —1,^5 = 0 and ts = oo, Eq. (5-3-2) may be simplified as
(^+1)- tc
which can be integrated along the real axis as
d^ + B
e = 2A + B.
To determine the constant A, we examine the change in e at point B:
For t <tB = 0,
VFor t>tB = 0,
-y/W 2H—.
TT
-v^1+V^
(5-3-3)
(5-3-4)

-35-
Therefore the change in e at point 5, according to Eq. (5-3-4), is
2A /—TT'Af =
Vic-ttA
w
(f)
But the mapping on the e plane shows
hence,
or
e =irkgAp
To determine the constant B, apply Eq. (5-3-6) at point C:
p, 2py/tc
Ae = -kgAp'
fi —ttA
kgAp '
A=irkgAp'
Substitution of Eq. (5-3-5) into Eq. (5-3-4) gives
kgAp wkgAp(o+^tan-'o)+B
from which one obtains
e =kgAp
B = -kgAp'
Substituting Eq. (5-3-7) into Eq. (5-3-6) gives
(5-3-5)
(5-3-7)
(5-3-8)
5-3-7. Transformation Between ft—Plane and Plane
The transformation between ft-plane and 9fJ—plane may be again obtained by em
ploying the Transformsition of Schwarz and Cbristoffeh
a = A +B. (5-3-9)

- 36 -
Since we have chosen tA = = 0 and ts = oo, Eq. (5-3-9) may be simplified as
"-"Iwhich can be integrated along the real axis as
+ B
To determine the constant A, we may examine the change in H at point A:
For t <tA = -1 <0 < to,
t -f 1
For tn > 0 > t > tA = -1,
"m-"
t —tj)
t+l
-\-iO
t-tD+ iir
Therefore the change in ft at point Ay according to Eq. (5-3-11), is
Aft =- ^ (zV) = —.1 + 1 +
But the mapping on the ft-plane shows
hence
2 l-hto'
or
qc
l + to 27r'
Substitution of Eq. (5-3-12) into Eq. (5-3-11) gives
2t yt-tDj
To determine the constant By apply Eq. (5-3-13) at point B:
0= ) +B,2)r X-to)
(5 - 3 - 10)
(5-3-11)
(5 - 3 - 12)
(5 - 3 - 13)

from which one obtains
- 37 -
B= ).2t
Substituting Eq. (5-3-14) into Eq. (5-3-13) gives
fl = -|s.ln27r
~^d(^ +1)t-tD J
5-3-8. Solution to Water-Oil Interface, Critical Oil Rate.
(5-3-14)
(5 - 3 - 15)
The solution of water-oil interface can be obtained solving Eq. (5-3-1): Differenti
ating Eq. (5-3-15) gives
da = —)dt. (5-3-16)27r Vi 1 t —
Substitutions of Eq. (5-3-8) and Eq. (5-3-16) into Eq. (5-3-1) gives
dz = —ir^kgAp
Vtc(t - to) +tan-> - I] -7^) (5-3-tc 2
To obtain the water-oil interface, we need to separate the imaginary part from this
complex equation.
Between points B and C, tc > ^ > Oj so
17)
tan ^ =4lnto 2 1 +
The imaginary part of Eq. (5-3-17) is then
dy=-tS^(-L L.)dt.^ 2nkQAp\t + l t-tnJ2nkgAp\t + l t-to
The height of water crest (he) can be obtained by integration of Eq. (5-3-18):
y
hc =y-yB =JVb
dy
t
J 2TrkgAp\t+l t —ti))t-B
2'KkgAp \ (t—tn) ^
(5 - 3 - 18)
dt
(5 - 3 - 19)

-38-
At the cusp point C,t = tc' The height of the water crest (He) is
= yc -VB = V (tc-to) )•2TrkgAp
To determine the constant toy one can apply Eq. (5-3-8) at point D:
0 =kgAp
^y/tcV̂^D —ic +
y/ic "V ic
Therefore, the constant to can be solved from Eq. (5-3-21) if constant tc is known.
To determine the constant tc, one can apply Eq. (5-3-8) at point A:
i2d /z
tan"
Qc kgAp
Since tc > 0, one hcis
tan"
Hence, Eq. (5-3-22) becomes
2'jrdkgAp
= ;r:ln2z
= 2V<c(l + <c) - In
V^+1,
\/^+V
IT
+ X-
(5 - 3 - 20)
(5-3-21)
(5 - 3 - 22)
(5 - 3 - 23)
from which tc can be solved numerically.
Assuming the dimensionless critical-crest-height is HcDi the real critical-crest-height
Hoc is then HcdC- Therefore, the critical oil production rate for unit length of wellbore,
according to Eq. (5-3-20), is
qc =2TrHcDckgAp
filn -tpitc+l){tc-to)
(5 - 3 - 24)
The critical rate, qc, can be solved by a numerical method from Eqs. (5-3-21), (5-
3-23), and (5-3-24) (see Chapter 7). It can be shown that Eq. (5-3-24) is reduced to Eq.
(5-1-25) when tn approaches infinity.
The real part of Eq. (5-3-17) is
dx = -ir^kgAp
-\/<c(<C'-0 +iln-i\
/Jv+^/^ Vt + l t-tojdt,
(5 - 3 - 25)

which can be integrated:
t
- 39 -
X -Itc
ir^kgAp -y/^c{tc -1) +2^^li +V^y'J \t + l t-tDj
(5 - 3 - 26)
Now, Eq. (5-3-26) can be integrated numerically.
The height of the water crest, given by Eq. (5-3-19) can be plotted versus lateral
distance, x, given by Eq.(5-3-26) with parameter t. This plot gives the location of the
water-oil-interface (see Chapter 7).
Eq. (5-3-24) indicates that the critical rate is a function of critical crest height at
the cusp point which is an unknown variable. This limits the application of the theory.
Theoretically, this can be avoided. In fact, Eq. (5-3-19) shows that at the outer boundary
where the crest is null, the parameter t takes a value of zero. Substituting t = Qinto the
upper boundary of the integral in Eq. (5-3-26) yields
xa
u
-/tc
ir^kgAp -y/^dtc -1)+2^ dt.\t + l t-toj
(5 - 3 - 27)
Theoretically, the critical rate (qc) can be numerically solved by combining Eq. (5-3-27),
Eq. (5-3-23) and Eq. (5-3-21). However, it is found that the integral In Eq. (5-3-27)
converges extremely slowly. It may be impossible to numerically solve these equations
using the currently available computers. Therefore, Eq. (5-3-24) has to be used for
determining the critical rate.
5-4. Wellbore Below the Roof of an Oil Reservoir, Subcritical Case
5-4-1. Flow Domain in Physical Plane z = x + iy
Since the flow region in physical plane is symmetric, only half of the flow region,
as shown in Fig. 5-4(a), is studied. Point E is a sink which represents the cross section
of horizontal wellbore. The wellbore is treated as a line-sink. Other boundary conditions
were discussed in Chapter 3.

LueisAsSujuooj9;bmbjo^ujBLUopmo|^SDUjddBi/M-f-9"Bjd
aD8V

- 40 -
5-4-2. Flow Domain in Hodograph Plane u = Vx + iVy
Mapping of the flow domain in hodograph plane is based on the mapping of the
domain in physical plane.
At point A, Vx = ql2d and Vy = 0, hence, point A is located at point (g/2d,0) in
the hodograph plane.
At point 5, Vy = 0, Va: = 0 according to Eq. (A-8) in Appendix A. Hence, point
B is a stagnation point, and so it should be located at origin in hodograph plane. So is
point D.
The mapping of boundary B —C —D is part of a circle according to Eq. (A-8).
Since point E represents a cross section of line-sink, the velocity at the point is
assumed to be infinite. If we denote Et, and Ea as two points approaching infinitely to point
E from below and above of point E, respectively, we may obtain that Vx = 0,Vy = -Hoc
at point Eh and Vx = 0, Vy = -oo at point Ea.
Another fact for hodograph mapping is that straight boundaries in physical plane
be mapped onto the hodograph plane as straight lines.
Based on the above analysis, the flow domain in hodograph plane is mapped in
Fig. 5-4(b). Comparison of Fig. 5-4(a) and Fig. 5-4(b) shows that the mapping from
physical plane to the hodograph plane is not conformal, but isogonal.
5-4-3. Flow Domain in a Modified Hodograph Plane e = a-\-ip
Because of the inconformity of mapping from physical plane to hodograph plane,
we need to modify the hodograph plane to use conformal mapping theory. Among many
transformations, the following one may be utilized to obtain the conformity:
£ = a-hi/?=
(5-4-0)- iv„

-41 -
This transformation is chosen because it simply relates to the flow domains represented
in z—plane and in ft—plane through Eq. (A-5) in Appendix A. In fact, combining it with
Eq. (A-5) givesdO, i
rfj" ?
from which one obtains
dz = —iedQ. (5 —4—1)
Eq. (5-4-1) is the fundamental equation of solving our problem.
Using Eq. (5-4-0), the flow domain in hodograph plane is mapped onto the modified
hodograph plane (e—plane) as shown in Fig. 5-4(c).
5-4-4. Flow Domain in Complex Potential Plane Q = <!> + iip.
Since the value of velocity potential <f> is relative, it does not matter where we map
each point of flow boundary on the complex potential plane, as long as these points are
arranged in such an order as to follow one direction on a stream line. Choosing the
stream function as zero along the lower boundary of the flow domain in physical domain
arbitrarily and assuming the velocity potential at point B is zero, we map the flow domain
in complex potential plane as shown in Fig. 5-4(d).
5-4-5. Flow Domain in a Intermediate Plane ^ = t +is
Since it is difficult to directly relate the flow domain represented in the modified
hodograph plane and that in the complex potential plane, we may indirectly relate them
through a third plane. We can first map the flow domains represented in both of the
two planes to the upper half of a intermediate plane by two transformations and then
combine the two transformations. The flow domain represented by the upper half of the
intermediate plane, U = t + is,is shown in Fig. 5-4(e). In the figure, ts = 1, = 0 and
= oo are chosen arbitrarily.

-42 -
5-4-5. Transformation Between £—Plane and Plane
The transformation between e—plane and 9li—plane may be obtained by employing
the Transformation of Schwarz and ChristoffeL
s=Aj{n-(» - + B. (5-4-2)
Since we have chosen ts = l,tp = 0 and to —oo, Eq. (5-4-2) may be simplified as
(»-i^)(«-ic)(» -1)^^
which can be integrated along the real axis as
d^ + B (5-4-3)
e = 2A -I- (1 - - tc)V< + - <0 +1)In I + B. (5-4-4)
To determine the constant A, we may examine the change in e at point B:
For t>tB = h
a/7-1+ iO.
For t = 1,
In4-^ =ln
In
y/i + 1
y/t- 1
\/t + l= In
v^+1
y/l-l
\/t+l+ iTT.
Therefore the change in e at point according to Eq. (5-4-4), is
Ae = A(iAtc -^A-tc 1)(20- ztt)
= -i'KA{tAtc -tA-tc + l)
But the mapping on the £-plane shows
A£ = -kgAp'
hence,
A=-TrkgAp{tAtc - ^>1 - + 1)
(5-4-5)

-43-
Substitution of Eq. (5-4-5) into Eq. (5-4-4) gives
-tfi
irkgApri
tAtc — —ic + ^+ {I - tA - tc)y/i
+ lny/i- 1y/i -{- 1
+ B,
To determine the constant B, apply Eq. (5-4-6) at point E:
0 =irkgAp Ja^c -tA-tc + '̂
ly/ip+(i-tA-tc)Vt^ + ln
from which one obtains
(5-4-6)
y/is- 1ViE+l.
+ B,
B =ifi
irkgAp tAtc — + 1
y/tE- 1
(1-tA- tc)y/iE
2/i
irkgAp
+ ln\/^E + 1
Substituting Eq. (5-4-7) into Eq. (5-4-6) gives
(5-4-7)
tAtc -tA-tc + 1j("n/^ - v^) +(1 - - tc)iViE - \/^)
(5-4-8)y/tE + 1 y/i+1
5-4-6. Transformation Between (2—Plane and 3U-Plane
The transformation between 0—plane and 3?-plane may be again obtained by em
ploying the Transformation of Schwarz and Christoffel.
n = A +B. (5-4-9)
Eq. (5-4-9) may be simplified as
dU
(K-t^)(»-tE)
which can be integrated along the real axis as
+ B
SI =—-—In (-—+B.tA-tE Kt-tEj
(5-4-10)
(5 - 4 - 11)

-44-
To determine the constant A, we may apply Eq. (5-4-11) to point F:
2 tA-tE
which gives
(5 - 4 - 12)
Eq. (5-4-12) can also be obtained by examining the change in ft at point A.
Substitution of Eq. (5-4-12) into Eq. (5-4-11) gives
2ir \t^tEj
To determine the constant B, apply Eq. (5-4-13) at point B:
27r xtB-tE/
from which one obtains
27r \l-tEj
Substituting Eq. (5-4-14) into Eq. (5-4-13) gives
(5 - 4 - 13)
(5 - 4 - 14)
n = f27r
(5 - 4 - 15)
5-4-7. Solution to Water-Oil Interface
The solution of water-oil interface can be obtained by solving Eq. (5-4-1): Differentiating
Eq. (5-4-15) gives
d{l =^(— i—) dt. (5-4-16)2Tr \t-tA t-tEj
Substitutions of Eq. (5-4-8) and Eq. (5-4-16) into Eq. (5-4-1) gives
dz =qy.
2Tr^kgAp tAic —tA —tc + ^
+ Vi)] +1. (^) -1.(^)(-\t-tA t-tEj
(5-4-17)

-45 -
To obtain the water-oil interface, we need to separate the imaginary part from this
complex equation: Since is < 0, y/ts = iy/-tE» Therefore,
y/iE-\ _ tE + l _y/tE + 1 —1 —1 '
and
Vv^E + l/ "I" 1
\ ^£ + 1 /
Between points B and D, t > 1, so
(^) =Therefore the imaginary part of Eq. (5-4-17) is then
dy =g/i
2Tr'̂ kgAp tAtc - - <c + 1
\t-tA t-tsJ(5-4-18)
The height of water crest (h) can be obtained by integration of Eq. (5-4-18):
1. e.,
y
h=y-yB= JVb
dy
qy.I
-I 2Tr'̂ kgAp tA^c — —i^c + 1[ix/^
h =
+ (l-tA- to)\^
dt,\t-tA t-tEj '
qfj,
-f tan'
2Tr'̂ kgAp
+ (l-tA- tcW-iE
In
tAtc -tA-tc + l
re - tE)'u< - 'b)(1 -tA)\
.1 (-2V=iE\\ tE + l J
(5 - 4 - 19)

-46 -
At the cusp point D, t approaches to = oo. The height of the water crest {H) is
H = yD-yBqH 2
2w^kgAp tA^C — + 1
+ (1 - - tcW-tE + tan".1 (-2V=iE\
\ tE + i J
InL(i-<a)J*
The constants tAytc-, and are determined in the following:
Applying Eq. (5-4-8) at point A gives
.2d ill0 + t— = , .
q irkgAp iA^c — + 1lis/i?- y/t?)
+ (1 - -^c)(^/^i-Vu)] +In (^qrr)
which has a real part equation of
0irkgAp i-Atc —tA —ic + ^
-{1-tA- tc)V^ -tan ^̂ ^and an imaginary part equation of
2d p, 2
q irkgAp tAtc —tA - tc + 'ii
Applying Eq. (5-4-8) at point C gives
/»
kgC^p
+ (!-'/!- tc)(\/iE - Vic) + In
\\/ic -hi/
(5 - 4 - 20)
(5 - 4 - 21)
(5-4-22)
(5 - 4 - 23)
(5-4-24)

-47-
The real part of Eq. (5-4-24) is the same as Eq. (5-4-22). The imaginary part of Eg.
(5-4-24) is
2P = irkgAp iA^c - tA - tc + I
-^Vt(
(5 - 4 - 25)
Therefore, constants tAitc and ts may be solved simultaneously from equations (5-4-22),
(5-4-23) and (5-4-25) with parameter /? which is 0 for critical condition.
The real part of Eq. (5-4-17) is
dx =2T^kgAp tAtc -tA-tc + 'i- 3
which has an integral form of
Joo 2Tr^kgAp ^A^C — —^£7 + 1 4^
U\t-tA t-tEj
(5 - 4 - 26)
(5 - 4 - 27)
Now, Eq. (5-4-27) can be integrated numerically.
The height of water crest, given by Eq. (5-4-19) can be plotted versus lateral
distance, x, given by Eq. (5-4-27) with parameter t. The plot gives the location of the
water-oil-interface (see Chapter 7).

CHAPTER 6
SOLUTIONS TO GAS-OIL CRESTING SYSTEMS
In this chapter, four cases in two gas-oil cresting systems are studied, and the critical
oil rates and the location of gas-oil interfaces in the two systems are determined.
Case 1: Wellbore is located at the bottom of an oil reservoir: critical case as shown
in Fig. 6-l(a).
Case 2: Wellbore is located at the bottom of an oil reservoir: subcritical case as shown
in Fig. 6-2(a).
Case 3: Wellbore is located above the bottom of an oil reservoir: critical case as shown
in Fig. 6-3(a).
Case 4- Wellbore is located above the bottom of an oil reservoir: subcritical case as
shown in Fig. 6-4(a).
Conformal mapping method is utilized to solve the gas-oil-interface cresting problem. This
method is discussed in Appendix A.
6-1. Wellbore at the Bottom of an Oil Reservoir, Critical Case
6-1-1. Flow Domain in the Physical Plane z = x + iy
Since the flow region in physical plane is symmetric, only half of the flow region, as
shown in Fig. 6-l(a), is studied. Point D is a sink which represents the cross section of
-48 -