
Distributed-Parameter Systems: Exact Solutions · Free Vibration: The Differential ... a uniform...
221
School of Mechanical Engineering Iran University of Science and Technology Advanced Vibrations Distributed-Parameter Systems: Exact Solutions (Lecture Ten) By: H. Ahmadian [email protected]
-
Upload
nguyenmien -
Category
Documents
-
view
216 -
download
0
Transcript of Distributed-Parameter Systems: Exact Solutions · Free Vibration: The Differential ... a uniform...

School of Mechanical EngineeringIran University of Science and Technology
Advanced Vibrations
Distributed-Parameter Systems: Exact Solutions
(Lecture Ten)
By: H. [email protected]

School of Mechanical EngineeringIran University of Science and Technology
Distributed-Parameter Systems: Exact Solutions Relation between Discrete and
Distributed Systems . Transverse Vibration of Strings Derivation of the String Vibration
Problem by the Extended Hamilton Principle
Bending Vibration of Beams Free Vibration: The Differential
Eigenvalue Problem Orthogonality of Modes
Expansion Theorem Systems with Lumped Masses at
the Boundaries
Eigenvalue Problem and Expansion Theorem for Problems with Lumped Masses at the Boundaries
Rayleigh's Quotient . The Variational Approach to the Differential Eigenvalue Problem
Response to Initial Excitations Response to External Excitations Systems with External Forces at
Boundaries The Wave Equation Traveling Waves in Rods of
Finite Length

School of Mechanical EngineeringIran University of Science and Technology
FREE VIBRATION. THE DIFFERENTIAL EIGENVALUE PROBLEM

School of Mechanical EngineeringIran University of Science and Technology
FREE VIBRATION. THE DIFFERENTIAL EIGENVALUE PROBLEM
On physical grounds

School of Mechanical EngineeringIran University of Science and Technology
FREE VIBRATION. THE DIFFERENTIAL EIGENVALUE PROBLEMThe differential eigenvalue problem

School of Mechanical EngineeringIran University of Science and Technology
FREE VIBRATION. THE DIFFERENTIAL EIGENVALUE PROBLEM

School of Mechanical EngineeringIran University of Science and Technology
Example:

School of Mechanical EngineeringIran University of Science and Technology
Example:
School of Mechanical EngineeringIran University of Science and Technology
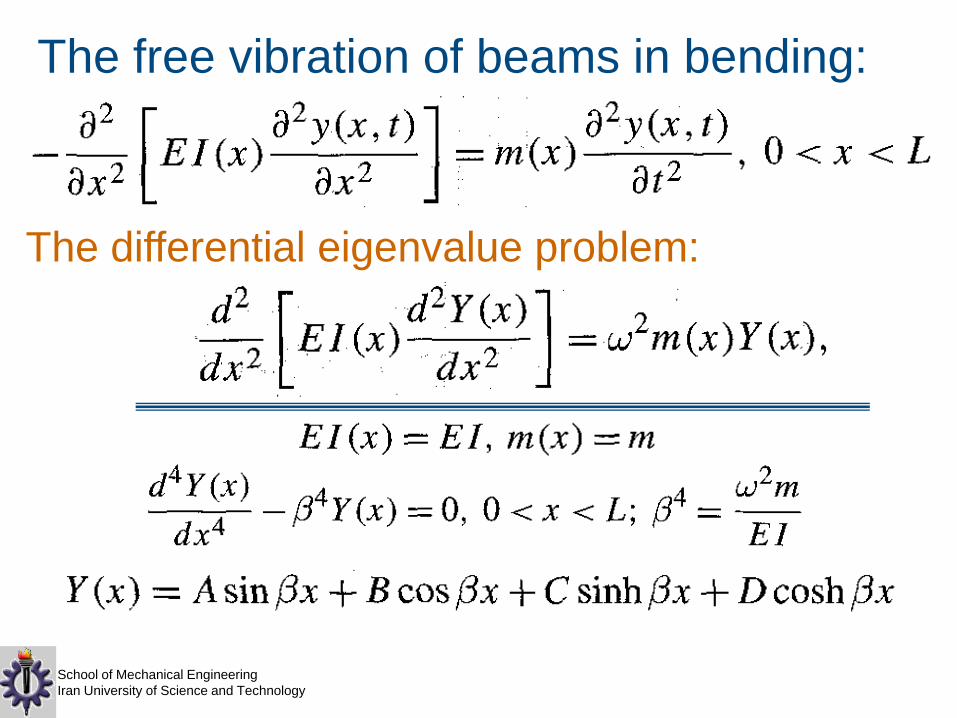
The free vibration of beams in bending:
The differential eigenvalue problem:

School of Mechanical EngineeringIran University of Science and Technology
Simply Supported beam:

School of Mechanical EngineeringIran University of Science and Technology
Uniform Clamped Beam:
0 1 0 1
1 0 1 0
− ( )sin β L − ( )cos β L ( )sinh β L ( )cosh β L
− ( )cos β L ( )sin β L ( )cosh β L ( )sinh β L
A
B
C
D

School of Mechanical EngineeringIran University of Science and Technology
Uniform Clamped Beam:

School of Mechanical EngineeringIran University of Science and Technology
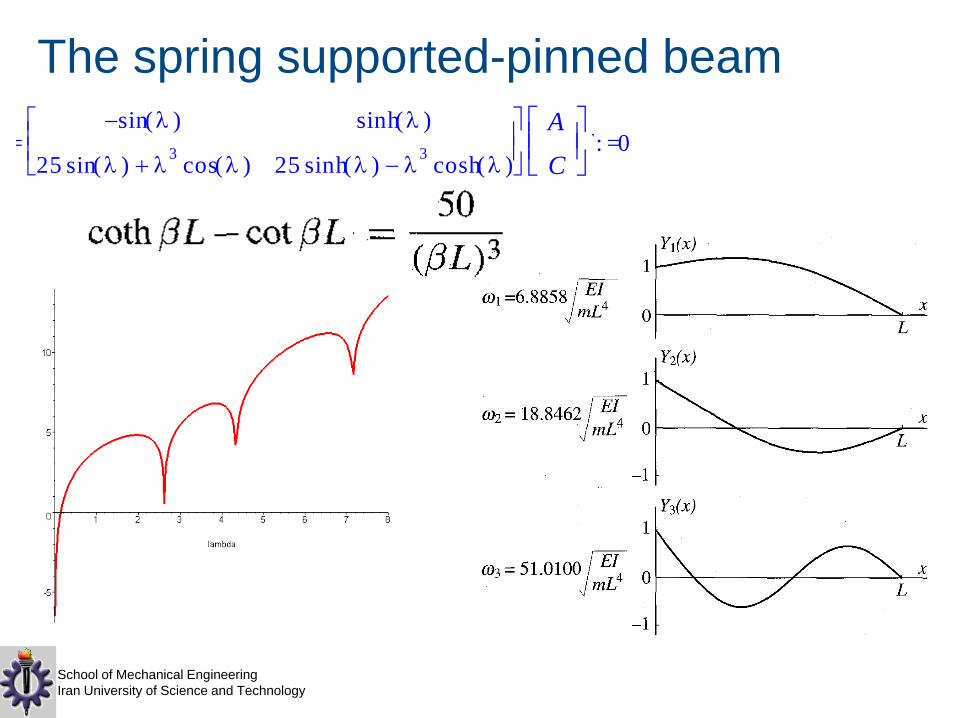
The spring supported-pinned beam
Characteristic equation
School of Mechanical EngineeringIran University of Science and Technology
The spring supported-pinned beam =
− ( )sin λ ( )sinh λ
+ 25 ( )sin λ λ3 ( )cos λ − 25 ( )sinh λ λ3 ( )cosh λ
A
C : = f 0

School of Mechanical EngineeringIran University of Science and Technology
ORTHOGONALITY OF MODES. EXPANSION THEOREMConsider two distinct solutions of the string eigenvalue problem:

School of Mechanical EngineeringIran University of Science and Technology
ORTHOGONALITY OF MODES. EXPANSION THEOREM

School of Mechanical EngineeringIran University of Science and Technology
ORTHOGONALITY OF MODES. EXPANSION THEOREM
To demonstrate the orthogonality relations for beams, we consider two distinct solutions of the eigenvalue problem:

School of Mechanical EngineeringIran University of Science and Technology
Orthogonality relations for beams

School of Mechanical EngineeringIran University of Science and Technology
Orthogonality relations for beams

School of Mechanical EngineeringIran University of Science and Technology
Expansion Theorem:Any function Y(x) representing a possible displacement of the system, with certain continuity, can be expanded in the absolutely and uniformly convergent series of the eigenfunctions:
The expansion theorem forms the basis for modal analysis, which permits the derivation of the response to both initial excitations and applied forces.

School of Mechanical EngineeringIran University of Science and Technology
Distributed-Parameter Systems: Exact Solutions Relation between Discrete and
Distributed Systems . Transverse Vibration of Strings Derivation of the String Vibration
Problem by the Extended Hamilton Principle
Bending Vibration of Beams Free Vibration: The Differential
Eigenvalue Problem Orthogonality of Modes
Expansion Theorem Systems with Lumped Masses at
the Boundaries
Eigenvalue Problem and Expansion Theorem for Problems with Lumped Masses at the Boundaries
Rayleigh's Quotient . The Variational Approach to the Differential Eigenvalue Problem
Response to Initial Excitations Response to External Excitations Systems with External Forces at
Boundaries The Wave Equation Traveling Waves in Rods of
Finite Length

School of Mechanical EngineeringIran University of Science and Technology
Advanced Vibrations
Distributed-Parameter Systems: Exact Solutions
(Lecture Eleven)
By: H. [email protected]

School of Mechanical EngineeringIran University of Science and Technology
Distributed-Parameter Systems: Exact Solutions Relation between Discrete and
Distributed Systems . Transverse Vibration of Strings Derivation of the String Vibration
Problem by the Extended Hamilton Principle
Bending Vibration of Beams Free Vibration: The Differential
Eigenvalue Problem Orthogonality of Modes
Expansion Theorem Systems with Lumped Masses at
the Boundaries
Eigenvalue Problem and Expansion Theorem for Problems with Lumped Masses at the Boundaries
Rayleigh's Quotient . The Variational Approach to the Differential Eigenvalue Problem
Response to Initial Excitations Response to External Excitations Systems with External Forces at
Boundaries The Wave Equation Traveling Waves in Rods of
Finite Length

School of Mechanical EngineeringIran University of Science and Technology
SYSTEMS WITH LUMPED MASSES AT THE BOUNDARIES: Rod with Tip Mass

School of Mechanical EngineeringIran University of Science and Technology
SYSTEMS WITH LUMPED MASSES AT THE BOUNDARIES: Rod with Tip Mass
By means of the extended Hamilton's principle:

School of Mechanical EngineeringIran University of Science and Technology
SYSTEMS WITH LUMPED MASSES AT THE BOUNDARIES: Rod with Tip Mass

School of Mechanical EngineeringIran University of Science and Technology
SYSTEMS WITH LUMPED MASSES AT THE BOUNDARIES: Rod with Tip Mass

School of Mechanical EngineeringIran University of Science and Technology
SYSTEMS WITH LUMPED MASSES AT THE BOUNDARIES: Beam with Lumped Tip Mass

School of Mechanical EngineeringIran University of Science and Technology
SYSTEMS WITH LUMPED MASSES AT THE BOUNDARIES: Beam with Tip MassBy means of the extended Hamilton's principle:

School of Mechanical EngineeringIran University of Science and Technology
SYSTEMS WITH LUMPED MASSES AT THE BOUNDARIES: Beam with Tip Mass

School of Mechanical EngineeringIran University of Science and Technology
EIGENVALUE PROBLEM AND EXPANSION THEOREM FOR PROBLEMS WITH LUMPED MASSES AT THE BOUNDARIES

School of Mechanical EngineeringIran University of Science and Technology
EIGENVALUE PROBLEM AND EXPANSION THEOREM FOR PROBLEMS WITH LUMPED MASSES AT THE BOUNDARIESThe orthogonality of modes:

School of Mechanical EngineeringIran University of Science and Technology
EIGENVALUE PROBLEM AND EXPANSION THEOREM FOR PROBLEMS WITH LUMPED MASSES AT THE BOUNDARIES

School of Mechanical EngineeringIran University of Science and Technology
EIGENVALUE PROBLEM AND EXPANSION THEOREM FOR PROBLEMS WITH LUMPED MASSES AT THE BOUNDARIES

School of Mechanical EngineeringIran University of Science and Technology
EIGENVALUE PROBLEM AND EXPANSION THEOREM FOR PROBLEMS WITH LUMPED MASSES AT THE BOUNDARIES

School of Mechanical EngineeringIran University of Science and Technology
EIGENVALUE PROBLEM AND EXPANSION THEOREM FOR PROBLEMS WITH LUMPED MASSES AT THE BOUNDARIES

School of Mechanical EngineeringIran University of Science and Technology
Example 8.6. The eigenvalue problem for a uniform circular shaft in torsion

School of Mechanical EngineeringIran University of Science and Technology
Example 8.6. The eigenvalue problem for a uniform circular shaft in torsion

School of Mechanical EngineeringIran University of Science and Technology
Example 8.7. The eigenvalue problem for a uniform cantilever beam with tip mass

School of Mechanical EngineeringIran University of Science and Technology
Example 8.7. The eigenvalue problem for a uniform cantilever beam with tip mass
As the mode number increases, the end acts more as a pinned end

School of Mechanical EngineeringIran University of Science and Technology
EIGENVALUE PROBLEM AND EXPANSION THEOREM FOR PROBLEMS WITH LUMPED MASSES AT THE BOUNDARIESAny function U(x) representing a possible displacement of the continuous model, which implies that U(x) satisfies boundary conditions and is such that its derivatives up to the order appeared in the model is a continuous function, can be expanded in the absolutely and uniformly convergent series of the eigenfunctions:

School of Mechanical EngineeringIran University of Science and Technology
Distributed-Parameter Systems: Exact Solutions Relation between Discrete and
Distributed Systems . Transverse Vibration of Strings Derivation of the String Vibration
Problem by the Extended Hamilton Principle
Bending Vibration of Beams Free Vibration: The Differential
Eigenvalue Problem Orthogonality of Modes
Expansion Theorem Systems with Lumped Masses at
the Boundaries
Eigenvalue Problem and Expansion Theorem for Problems with Lumped Masses at the Boundaries
Rayleigh's Quotient . The Variational Approach to the Differential Eigenvalue Problem
Response to Initial Excitations Response to External Excitations Systems with External Forces at
Boundaries The Wave Equation Traveling Waves in Rods of
Finite Length

School of Mechanical EngineeringIran University of Science and Technology
Advanced Vibrations
Distributed-Parameter Systems: Exact Solutions
(Lecture Twelve)
By: H. [email protected]

School of Mechanical EngineeringIran University of Science and Technology
Distributed-Parameter Systems: Exact Solutions Relation between Discrete and
Distributed Systems . Transverse Vibration of Strings Derivation of the String Vibration
Problem by the Extended Hamilton Principle
Bending Vibration of Beams Free Vibration: The Differential
Eigenvalue Problem Orthogonality of Modes
Expansion Theorem Systems with Lumped Masses at
the Boundaries
Eigenvalue Problem and Expansion Theorem for Problems with Lumped Masses at the Boundaries
Rayleigh's Quotient . The Variational Approach to the Differential Eigenvalue Problem
Response to Initial Excitations Response to External Excitations Systems with External Forces at
Boundaries The Wave Equation Traveling Waves in Rods of
Finite Length

School of Mechanical EngineeringIran University of Science and Technology
RAYLEIGH'S QUOTIENT. VARIATIONAL APPROACH TO THE DIFFERENTIAL EIGENVALUE PROBLEM
Cases in which the differential eigenvalue problem admits a closed-form solution are very rare : Uniformly distributed parameters and Simple boundary conditions.
For the most part, one must be content with approximate solutions, Rayleigh's quotient plays a pivotal role.

School of Mechanical EngineeringIran University of Science and Technology
The strong form of the eigenvalue problemA rod in axial vibration fixed at x=0 and with a spring of
stiffness k at x=L.
An exact solution of the eigenvalue problem in the strong form is beyond reach, The mass and stiffness parameters depend on the
spatial variable x .

School of Mechanical EngineeringIran University of Science and Technology
The differential eigenvalue problem in a weak form
The solution of the differential eigenvalue problem is in a weighted average sense The test function V(x) plays the role of a
weighting function.The test function V(x) satisfies the geometric
boundary conditions and certain continuity requirments.
Test function

School of Mechanical EngineeringIran University of Science and Technology
The differential eigenvalue problem in a weak form
Symmetrizing the left side

School of Mechanical EngineeringIran University of Science and Technology
The differential eigenvalue problem in a weak form: Rayleigh's quotient
We consider the case in which the test function is equal to the trial function:
The value of R depends on the trial functionHow the value of R behaves as U(x) changes?

School of Mechanical EngineeringIran University of Science and Technology
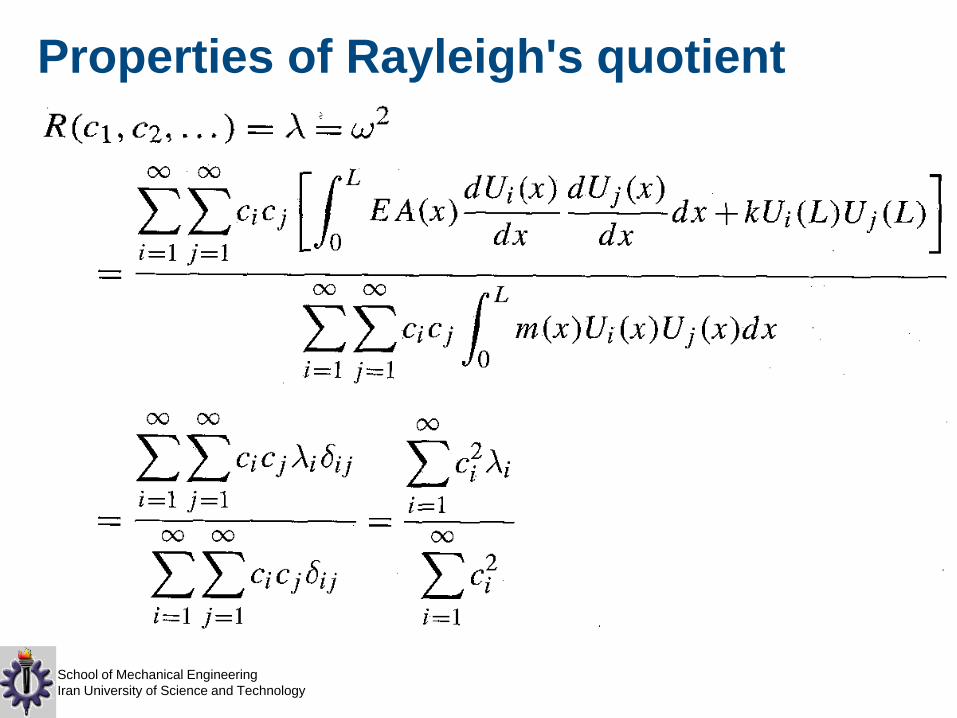
Properties of Rayleigh's quotient
School of Mechanical EngineeringIran University of Science and Technology
Properties of Rayleigh's quotient

School of Mechanical EngineeringIran University of Science and Technology
Properties of Rayleigh's quotient

School of Mechanical EngineeringIran University of Science and Technology
Properties of Rayleigh's quotient
The trial function U(x) differs from the rth
eigenfunction Ur ( x ) by a small quantity of first order in and Rayleigh's quotient differs from the rth
eigenvalue by a small quantity of second order inRayleigh 's quotient has a stationary value at
an eigenfinction Ur(x), where the stationary value is the associated eigenvalue.

School of Mechanical EngineeringIran University of Science and Technology
Properties of Rayleigh's quotient
School of Mechanical EngineeringIran University of Science and Technology
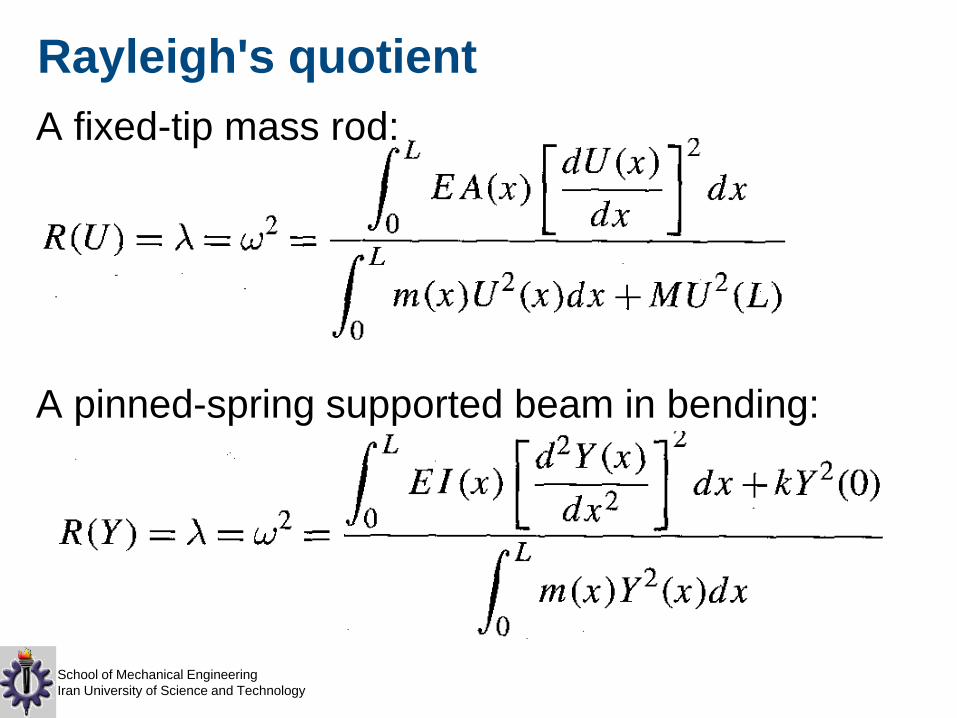
Rayleigh's quotientA fixed-tip mass rod:
A pinned-spring supported beam in bending:
School of Mechanical EngineeringIran University of Science and Technology
Rayleigh's quotient
Rayleigh's quotient for all systems have one thing in common: the numerator is a measure of the potential
energy and the denominator a measure of the kinetic
energy.
School of Mechanical EngineeringIran University of Science and Technology
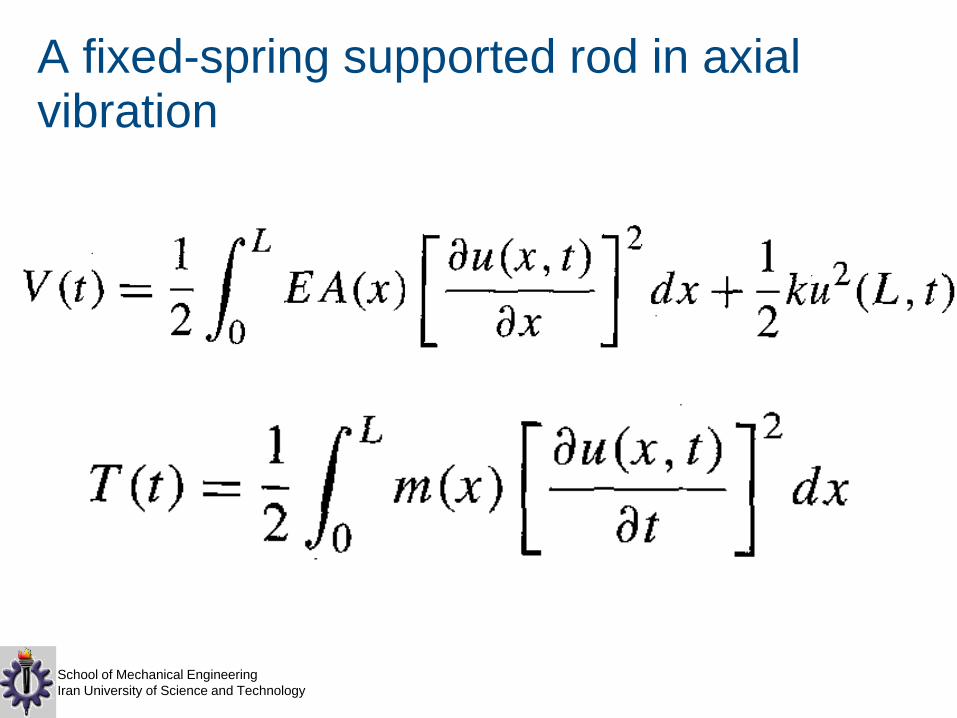
A fixed-spring supported rod in axial vibration

School of Mechanical EngineeringIran University of Science and Technology
A fixed-spring supported rod in axial vibration

School of Mechanical EngineeringIran University of Science and Technology
Example 8.8. Estimation of the lowest eigenvalue by means of Rayleigh's principle

School of Mechanical EngineeringIran University of Science and Technology
Example 8.8: a) The static displacement curve as a trial function

School of Mechanical EngineeringIran University of Science and Technology
Example 8.8: a) The static displacement curve as a trial function

School of Mechanical EngineeringIran University of Science and Technology
Example 8.8: b)The lowest eigenfunction of a fixed-free string as a trial function

School of Mechanical EngineeringIran University of Science and Technology
Distributed-Parameter Systems: Exact Solutions Relation between Discrete and
Distributed Systems . Transverse Vibration of Strings Derivation of the String Vibration
Problem by the Extended Hamilton Principle
Bending Vibration of Beams Free Vibration: The Differential
Eigenvalue Problem Orthogonality of Modes
Expansion Theorem Systems with Lumped Masses at
the Boundaries
Eigenvalue Problem and Expansion Theorem for Problems with Lumped Masses at the Boundaries
Rayleigh's Quotient . The Variational Approach to the Differential Eigenvalue Problem
Response to Initial Excitations Response to External Excitations Systems with External Forces at
Boundaries The Wave Equation Traveling Waves in Rods of
Finite Length

School of Mechanical EngineeringIran University of Science and Technology
Advanced Vibrations
Distributed-Parameter Systems: Exact Solutions
(Lecture Thirteen)
By: H. [email protected]

School of Mechanical EngineeringIran University of Science and Technology
Distributed-Parameter Systems: Exact Solutions Relation between Discrete and
Distributed Systems . Transverse Vibration of Strings Derivation of the String Vibration
Problem by the Extended Hamilton Principle
Bending Vibration of Beams Free Vibration: The Differential
Eigenvalue Problem Orthogonality of Modes
Expansion Theorem Systems with Lumped Masses at
the Boundaries
Eigenvalue Problem and Expansion Theorem for Problems with Lumped Masses at the Boundaries
Rayleigh's Quotient . The Variational Approach to the Differential Eigenvalue Problem
Response to Initial Excitations Response to External Excitations Systems with External Forces at
Boundaries The Wave Equation Traveling Waves in Rods of
Finite Length
School of Mechanical EngineeringIran University of Science and Technology
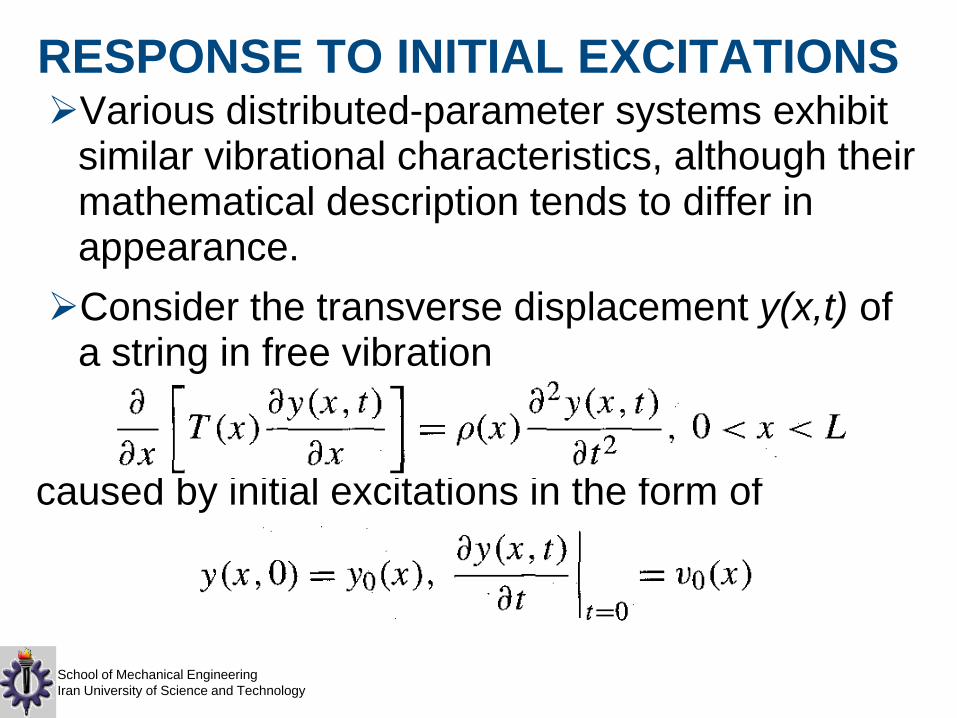
RESPONSE TO INITIAL EXCITATIONSVarious distributed-parameter systems exhibit
similar vibrational characteristics, although their mathematical description tends to differ in appearance.Consider the transverse displacement y(x,t) of
a string in free vibration
caused by initial excitations in the form of

School of Mechanical EngineeringIran University of Science and Technology
RESPONSE TO INITIAL EXCITATIONS
the normal modes

School of Mechanical EngineeringIran University of Science and Technology
Example:Response of a uniform string to the initial displacement y0(x)and zero initial velocity.

School of Mechanical EngineeringIran University of Science and Technology
Example:
School of Mechanical EngineeringIran University of Science and Technology
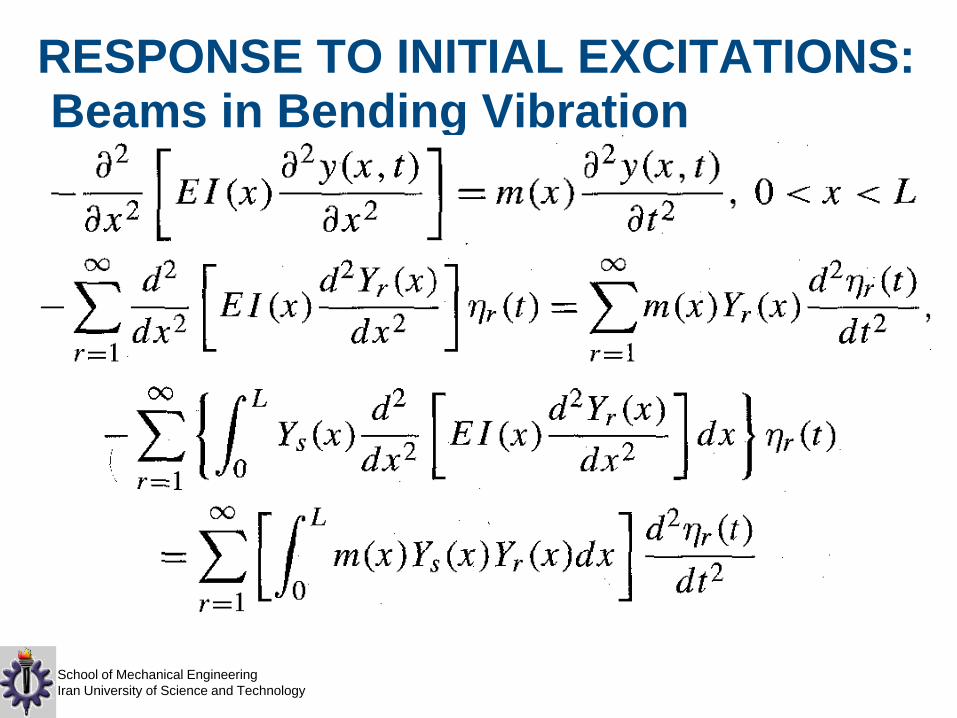
RESPONSE TO INITIAL EXCITATIONS:Beams in Bending Vibration

School of Mechanical EngineeringIran University of Science and Technology
RESPONSE TO INITIAL EXCITATIONS:Beams in Bending Vibration
To demonstrate that every one of the natural modes can be excited independently of the other modes we select the initials as:

School of Mechanical EngineeringIran University of Science and Technology
RESPONSE TO INITIAL EXCITATIONS:Response of systems with tip masses
Boundary conditions
Initial conditions

School of Mechanical EngineeringIran University of Science and Technology
RESPONSE TO INITIAL EXCITATIONS:Response of systems with tip masses
Observing from boundary condition

School of Mechanical EngineeringIran University of Science and Technology
RESPONSE TO INITIAL EXCITATIONS:Response of systems with tip masses
Similarly,

School of Mechanical EngineeringIran University of Science and Technology
Example:Response of a cantilever beam with a lumped mass at the end to the initial velocity:
School of Mechanical EngineeringIran University of Science and Technology
Example:

School of Mechanical EngineeringIran University of Science and Technology
Example:
Because initial velocity resembles the 2nd mode

School of Mechanical EngineeringIran University of Science and Technology
RESPONSE TO EXTERNAL EXCITATIONS
The various types of distributed-parameter systems differ more in appearance than in vibrational characteristics.We consider the response of a beam in
bending supported by a spring of stiffness k at x=0 and pinned at x=L.

School of Mechanical EngineeringIran University of Science and Technology
RESPONSE TO EXTERNAL EXCITATIONS
Orthonormal modes

School of Mechanical EngineeringIran University of Science and Technology
RESPONSE TO EXTERNAL EXCITATIONS: Harmonic Excitation
Controls which mode is excited.
Controls the resonance.

School of Mechanical EngineeringIran University of Science and Technology
RESPONSE TO EXTERNAL EXCITATIONS: Arbitrary Excitation
The developments remain essentially the same for all other boundary conditions, and the same can be said about other systems.

School of Mechanical EngineeringIran University of Science and Technology
ExampleDerive the response of a uniform pinned-pinned beam to a concentrated force of amplitude F0acting at x = L/2 and having the form of a step function.
Orthonormal Modes

School of Mechanical EngineeringIran University of Science and Technology
Example

School of Mechanical EngineeringIran University of Science and Technology
Distributed-Parameter Systems: Exact Solutions Relation between Discrete and
Distributed Systems . Transverse Vibration of Strings Derivation of the String Vibration
Problem by the Extended Hamilton Principle
Bending Vibration of Beams Free Vibration: The Differential
Eigenvalue Problem Orthogonality of Modes
Expansion Theorem Systems with Lumped Masses at
the Boundaries
Eigenvalue Problem and Expansion Theorem for Problems with Lumped Masses at the Boundaries
Rayleigh's Quotient . The Variational Approach to the Differential Eigenvalue Problem
Response to Initial Excitations Response to External Excitations Systems with External Forces at
Boundaries The Wave Equation Traveling Waves in Rods of
Finite Length

School of Mechanical EngineeringIran University of Science and Technology
Advanced Vibrations
Distributed-Parameter Systems: Exact Solutions(Lecture Fourteen)
By: H. [email protected]

School of Mechanical EngineeringIran University of Science and Technology
Distributed-Parameter Systems: Exact Solutions Relation between Discrete and
Distributed Systems . Transverse Vibration of Strings Derivation of the String Vibration
Problem by the Extended Hamilton Principle
Bending Vibration of Beams Free Vibration: The Differential
Eigenvalue Problem Orthogonality of Modes
Expansion Theorem Systems with Lumped Masses at
the Boundaries
Eigenvalue Problem and Expansion Theorem for Problems with Lumped Masses at the Boundaries
Rayleigh's Quotient . The Variational Approach to the Differential Eigenvalue Problem
Response to Initial Excitations Response to External Excitations Systems with External Forces at
Boundaries The Wave Equation Traveling Waves in Rods of
Finite Length

School of Mechanical EngineeringIran University of Science and Technology
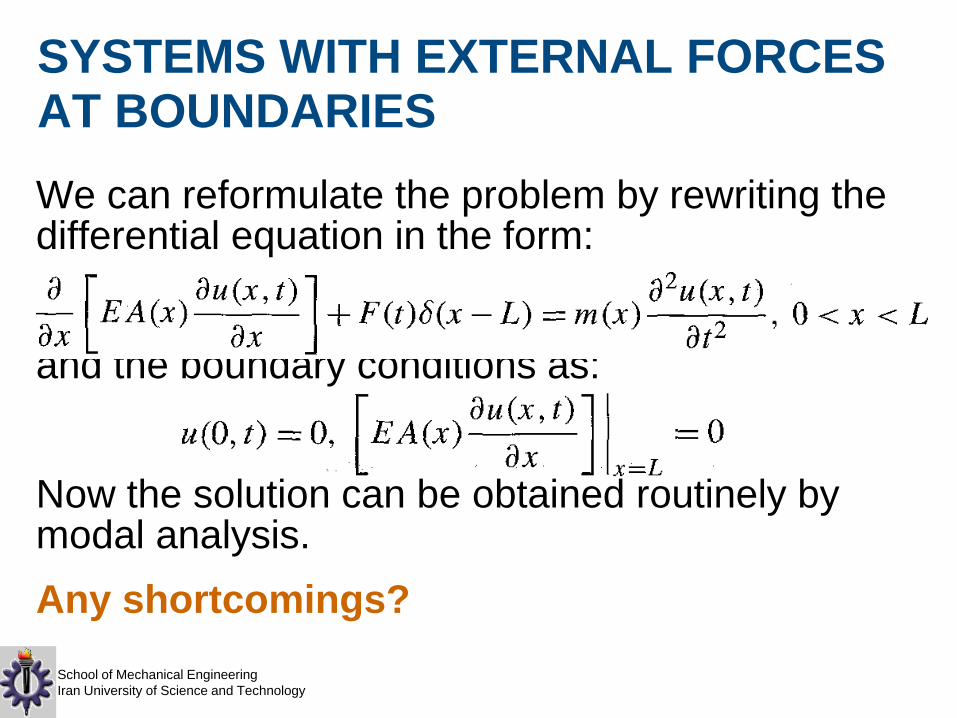
SYSTEMS WITH EXTERNAL FORCES AT BOUNDARIES
The 2nd of boundary conditions is nonhomogeneous, precludes the use of modal analysis for the
response.
School of Mechanical EngineeringIran University of Science and Technology
SYSTEMS WITH EXTERNAL FORCES AT BOUNDARIESWe can reformulate the problem by rewriting the differential equation in the form:
and the boundary conditions as:
Now the solution can be obtained routinely by modal analysis.Any shortcomings?

School of Mechanical EngineeringIran University of Science and Technology
SYSTEMS WITH EXTERNAL FORCES AT BOUNDARIES: ExampleObtain the response of a uniform rod, fixed at x=0 and subjected to a boundary force at x=L in the form:

School of Mechanical EngineeringIran University of Science and Technology
SYSTEMS WITH EXTERNAL FORCES AT BOUNDARIES: Example

School of Mechanical EngineeringIran University of Science and Technology

School of Mechanical EngineeringIran University of Science and Technology

School of Mechanical EngineeringIran University of Science and Technology

School of Mechanical EngineeringIran University of Science and Technology
System Dynamics in the Feed Direction

School of Mechanical EngineeringIran University of Science and Technology
System Dynamics in the Cutting Direction

School of Mechanical EngineeringIran University of Science and Technology

School of Mechanical EngineeringIran University of Science and Technology
Modeling Tool as Stepped Beam on Elastic Support: Boundary Conditions
School of Mechanical EngineeringIran University of Science and Technology
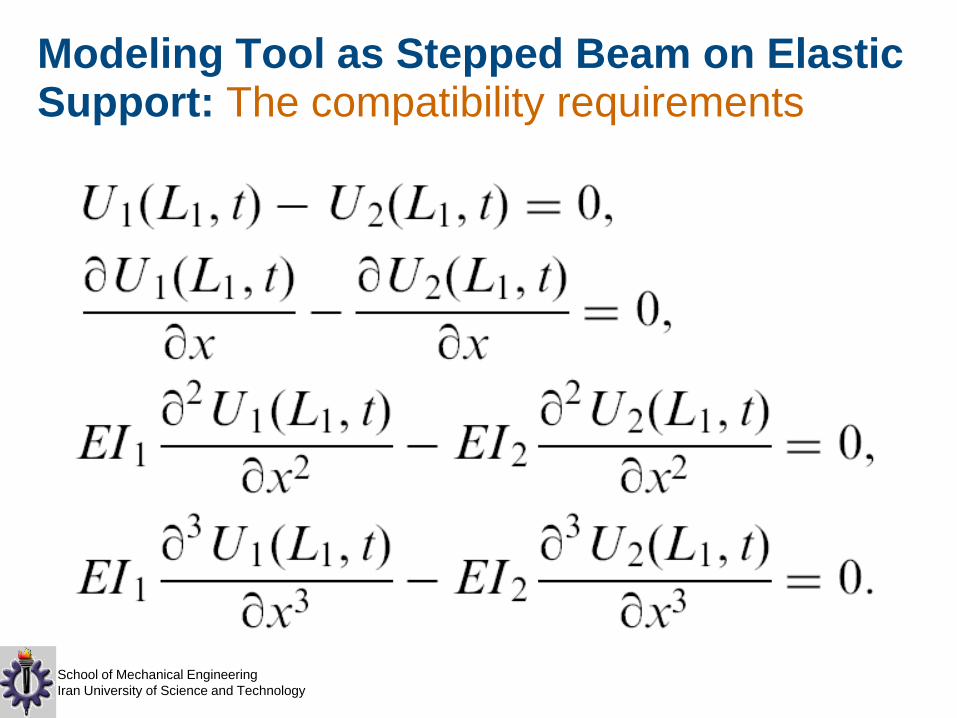
Modeling Tool as Stepped Beam on Elastic Support: The compatibility requirements

School of Mechanical EngineeringIran University of Science and Technology
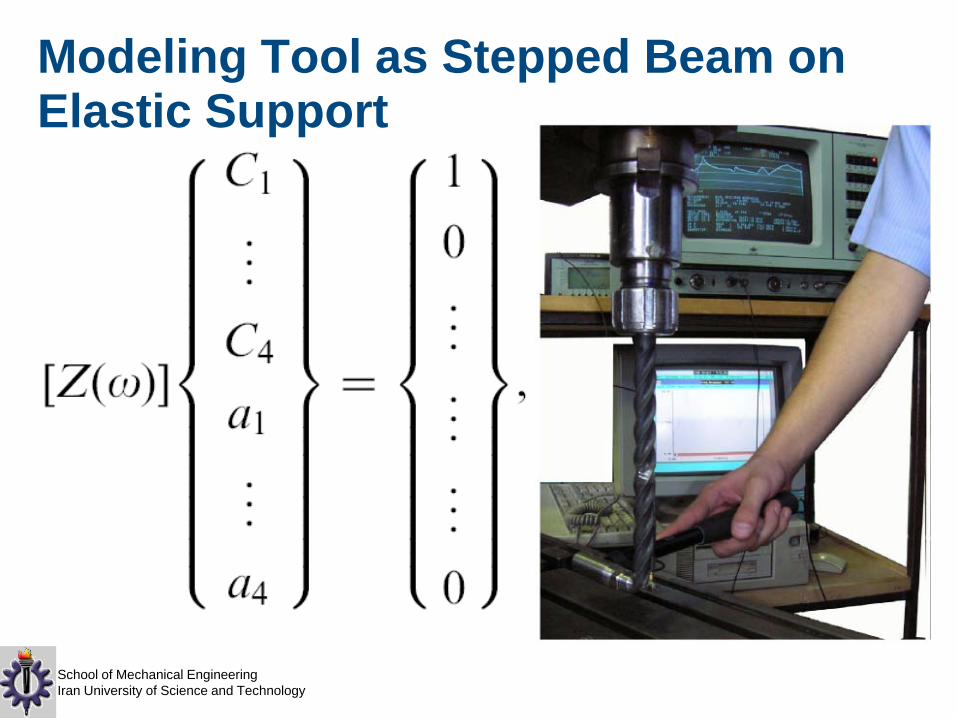
Modeling Tool as Stepped Beam on Elastic Support
School of Mechanical EngineeringIran University of Science and Technology
Modeling Tool as Stepped Beam on Elastic Support

School of Mechanical EngineeringIran University of Science and Technology
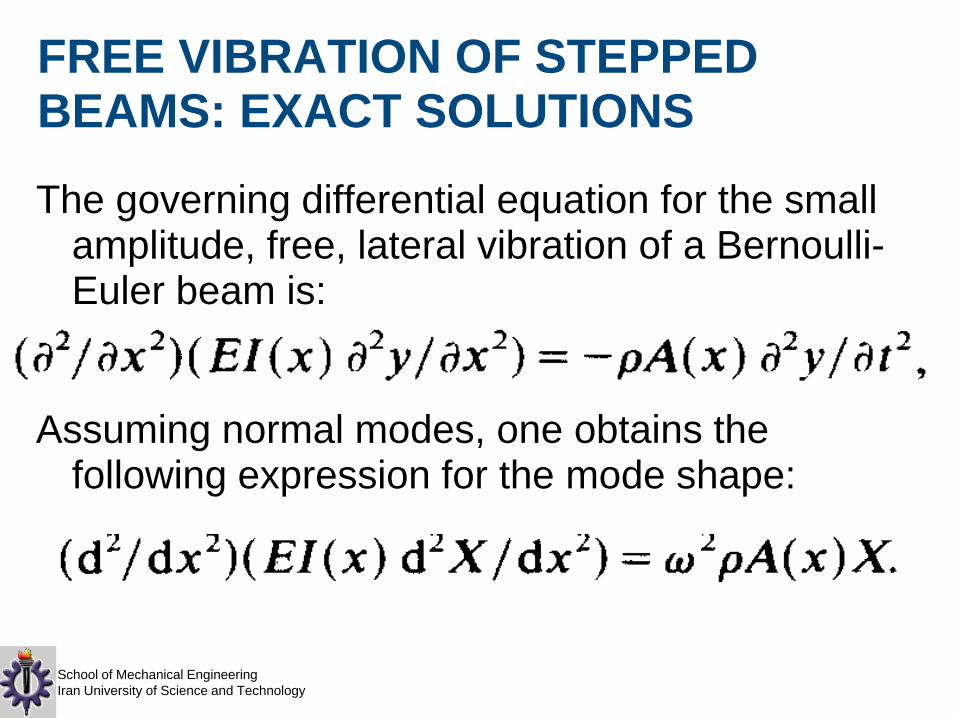
FREE VIBRATION OF STEPPED BEAMS: EXACT SOLUTIONS
As presented by:S. K. JANG and C. W. BERT 1989 Journal of
Sound and Vibration 130, 342-346. Free vibration of stepped beams: exact and numerical solutions.They sought lowest natural frequency of a
stepped beam with two different cross-sections for various boundary conditions.
School of Mechanical EngineeringIran University of Science and Technology
FREE VIBRATION OF STEPPED BEAMS: EXACT SOLUTIONS
The governing differential equation for the small amplitude, free, lateral vibration of a Bernoulli-Euler beam is:
Assuming normal modes, one obtains the following expression for the mode shape:

School of Mechanical EngineeringIran University of Science and Technology
FREE VIBRATION OF STEPPED BEAMS: EXACT SOLUTIONS
For the shown stepped beam, one can rewrite the governing equation as:

School of Mechanical EngineeringIran University of Science and Technology
Boundary Conditions:(1) pinned-pinned,
(2) clamped-clamped,
(3) clamped-free,
(4) clamped-pinned,

School of Mechanical EngineeringIran University of Science and Technology
Compatibility Requirements at the Interface
Stress concentration at the junction of the two parts of the beam is neglected.
At the junction, the continuity of deflection, slope, moment and shear force has to be preserved:

School of Mechanical EngineeringIran University of Science and Technology
The clamped-clamped beam problem:Introducing the BCs
Yields: C3=-C1, C4=-C2, C7=-C5 . C8=-C6

School of Mechanical EngineeringIran University of Science and Technology
The clamped-clamped beam problem:Compatibility Requirements
Let:
Then the compatibility requirements yield:

School of Mechanical EngineeringIran University of Science and Technology
Characteristic Equations for Other BCs

School of Mechanical EngineeringIran University of Science and Technology
Characteristic Equations for Other BCs

School of Mechanical EngineeringIran University of Science and Technology
Characteristic Equations for Other BCs

School of Mechanical EngineeringIran University of Science and Technology
Characteristic Equations for Other BCs

School of Mechanical EngineeringIran University of Science and Technology
Characteristic Equations for Other BCs

School of Mechanical EngineeringIran University of Science and Technology
Exact Solutions:

School of Mechanical EngineeringIran University of Science and Technology
HIGHER MODE FREQUENCIES ANDEFFECTS OF STEPS ON FREQUENCYBy extending the computations, higher mode
frequencies were found (Journal of Sound andVibration ,1989, 132(1), 164-168):

School of Mechanical EngineeringIran University of Science and Technology
Elastically Restrained Stepped Beams

School of Mechanical EngineeringIran University of Science and Technology
Boundary Conditions and Compatibility Requirements at the Interface :

School of Mechanical EngineeringIran University of Science and Technology
The Characteristic Equation

School of Mechanical EngineeringIran University of Science and Technology
Exact Solutions:

School of Mechanical EngineeringIran University of Science and Technology
Extension of the Research Work:

School of Mechanical EngineeringIran University of Science and Technology
Extension of the Research Work:

School of Mechanical EngineeringIran University of Science and Technology
Advanced Vibrations
LAGRANGE'S EQUATION FOR DISTRIBUTED SYSTEMS
Lecture Fifteen
By: H. [email protected]

School of Mechanical EngineeringIran University of Science and Technology
Distributed-Parameter Systems,The extended Hamilton's principle:
kinetic energy density
potential energy densitypotential energy due to springs at the ends
the distributed force
The effect of lumped boundary masses in translation and rotation

School of Mechanical EngineeringIran University of Science and Technology
Distributed-Parameter Systems,The extended Hamilton's principle:The Lagrangian can be expressed as:

School of Mechanical EngineeringIran University of Science and Technology
The extended Hamilton's principle:Lagrange differential equation of motion
boundary conditions

School of Mechanical EngineeringIran University of Science and Technology
Example 1:Derive the Lagrange equation and boundary
conditions for shown string,
Solution: This is only a second-order system, so that deleting derivatives higher than two the Lagrange equation reduces to:

School of Mechanical EngineeringIran University of Science and Technology
Example 1: BC’sThe physics of the problem dictates the BC’s:

School of Mechanical EngineeringIran University of Science and Technology
Example 2:Derive the Lagrange equation and boundary conditions for the rotating cantilever beam.
The potential energy consists of two parts, one due to bending and one due to the axial force, where the latter is entirely analogous to the potential energy in a string,

School of Mechanical EngineeringIran University of Science and Technology
Example 2:

School of Mechanical EngineeringIran University of Science and Technology
Example 2:

School of Mechanical EngineeringIran University of Science and Technology
Example 3: DISTRIBUTED GYROSCOPIC SYSTEMSDerive the boundary-value problem for a rotating elastic shaft simply supported at both ends.

School of Mechanical EngineeringIran University of Science and Technology
Example 3: DISTRIBUTED GYROSCOPIC SYSTEMS

School of Mechanical EngineeringIran University of Science and Technology
Example 3: DISTRIBUTED GYROSCOPIC SYSTEMS

School of Mechanical EngineeringIran University of Science and Technology
Example 4: Rayleigh Beam
Derive the boundary-value problem for the beam in bending vibration of Ex.2 under the assumption that the kinetic energy of rotation is not negligible.

School of Mechanical EngineeringIran University of Science and Technology
Example 4: Rayleigh Beam
Boundary conditions at each end:

School of Mechanical EngineeringIran University of Science and Technology
BEAM FLEXURE: INCLUDING AXIAL-FORCE EFFECTSThe problem of lateral vibrations of beams under
axial loading is of considerable practical interest,Tall buildingsAerospace structuresRotating machinery shafts
Because of its important practical applications, the problem of uniform single-span beams under a constant axial load has been the subject of considerable study.

School of Mechanical EngineeringIran University of Science and Technology
BEAM FLEXURE: INCLUDING AXIAL-FORCE EFFECTS

School of Mechanical EngineeringIran University of Science and Technology
BEAM FLEXURE: INCLUDING AXIAL-FORCE EFFECTS
Separating variables:

School of Mechanical EngineeringIran University of Science and Technology
BEAM FLEXURE: INCLUDING AXIAL-FORCE EFFECTS

School of Mechanical EngineeringIran University of Science and Technology
Example: A simply supported uniform beam
D1=0, D3=0, D4=0.

School of Mechanical EngineeringIran University of Science and Technology
BEAM FLEXURE: INCLUDING AXIAL-FORCE EFFECTS
Retaining the constant axial force N, the governing equation can be used to find the static buckling loads and corresponding shapes:

School of Mechanical EngineeringIran University of Science and Technology
GALEF Formula E. GALEF 1968 Journal of the Acoustical
Society of America 44, (8), 643. Bending frequencies of compressed beams:
School of Mechanical EngineeringIran University of Science and Technology
GALEF FormulaA. BOKAIAN, “NATURAL FREQUENCIES OF
BEAMS UNDERCOMPRESSIVE AXIAL LOADS”, Journal of Sound and Vibration (1988) 126(1), 49-65Studied the influence of a constant
compressive load on natural frequencies and mode shapes of a uniform beam with a variety of end conditions.Galef’s formula, previously assumed to be valid
for beams with all types of end conditions, is observed to be valid only for a few.

School of Mechanical EngineeringIran University of Science and Technology
GALEF FormulaBOKAIAN showed:The variation of the normalized natural
frequency with the normalized axial force for pinned-pinned, pinned-sliding and sliding-sliding beams is observed to be:

School of Mechanical EngineeringIran University of Science and Technology
GALEF FormulaBOKAIAN showed:Galef’s formula, previously
assumed to be valid for beams with all types of end conditions, is observed to be valid only for a few.The effect of end
constraints on natural frequency of a beam is significant only in the first few modes.

School of Mechanical EngineeringIran University of Science and Technology

School of Mechanical EngineeringIran University of Science and Technology
For pinned-pinned, pinned-sliding and sliding-sliding beams, this variation may exactly be expressed as 0 = 1 + i?. This formula may be used for beams with other types
of end constraints when the beam vibrates in a third mode or higher. For beam with other types of boundary conditions, this
approximation may be expressed as 0 = F 1 + yU (y < where the coefficient y depends only on the type of the end constraints.

School of Mechanical EngineeringIran University of Science and Technology
School of Mechanical EngineeringIran University of Science and Technology
The study is an investigation of the combined effects of compressive inertia forces due to a conservative
model of steady thrust and uniform mass depletion on the transverse vibration
characteristics of a single stage variable mass rocket.the effect of the aerodynamic drag in comparison to
the thrust is considered to be negligible and the rocket is structurally modeled as a non-uniform
slender beam representative of practical rocket configurations.

School of Mechanical EngineeringIran University of Science and Technology
In the study the typical single stage rocket structure is divided into a number of segments.Within which the
bending rigidity, axial compressive force and the mass distributions can be approximated as constants.

School of Mechanical EngineeringIran University of Science and Technology
The non-dimensional equation of motion for the ithconstant beam segment :

School of Mechanical EngineeringIran University of Science and Technology
The free-free boundary conditions are:
and the continuity conditions are

School of Mechanical EngineeringIran University of Science and Technology
The variation of frequency parameter and cyclic frequency versus the mass depletion parameter Md for the first three modes of vibration of a typical rocket executing a constant acceleration trajectory.

School of Mechanical EngineeringIran University of Science and Technology

School of Mechanical EngineeringIran University of Science and Technology

School of Mechanical EngineeringIran University of Science and Technology
Advanced Vibrations
THE DIFFERENTIAL EIGENVALUE PROBLEM FOR SELF-ADJOINT
SYSTEMS
By: H. [email protected]

School of Mechanical EngineeringIran University of Science and Technology
THE DIFFERENTIAL EIGENVALUE PROBLEM FOR SELF-ADJOINT SYSTEMS
Various systems have many things in common: It is convenient to formulate the differential eigenvalue problem so
as to apply to large classes of systems.
Let w be a function of one or two independent spatial variables x or x and y, and consider the homogeneous differential expression: homogeneous differential expression
of order 2p
Homogeneous differential operator of order 2p
Linear operator

School of Mechanical EngineeringIran University of Science and Technology
The Differential Eigenvalue Problem for Self-Adjoint SystemsConsider a generic eigenvalue problem in the operator form:
the domain of definitionstiffness operator of order 2p the boundary
boundary operators
Let two 2p times differentiable trial functions u and v satisfying all the boundary conditions
The differential operator L is self-adjoint if:
Self-adjointness implies certain mathematical symmetry and can be ascertained through integrations by parts with due consideration to the boundary conditions.

School of Mechanical EngineeringIran University of Science and Technology
The Differential Eigenvalue Problem for Self-Adjoint SystemsDenote the symmetric form in u and v resulting from
integrations by parts of (u,Lv) by [u,v] and refer to it as an energy inner product.
For one-dimensional domains, the energy inner product has the general expression: Functions of x
The beam with tip spring example:
energy inner product

School of Mechanical EngineeringIran University of Science and Technology
The Differential Eigenvalue Problem for Self-Adjoint Systems
Assume that the problem is self-adjoint and consider two distinct solutions:
distinct eigenvalues
Orthogonality of the eigenfunctions is a direct consequence of the system being self-adjoint.

School of Mechanical EngineeringIran University of Science and Technology
The Differential Eigenvalue Problem for Self-Adjoint SystemsWe assumed on physical grounds that the eigenvalues and
eigenfunctions are real.
We propose to prove here mathematically that this is indeed so, provided the system is self-adjoint. the complex conjugate pair
the integral is real and positive,

School of Mechanical EngineeringIran University of Science and Technology
Example 5:Consider the eigenvalue problem for the string in transverse
vibration, demonstrate that the problem fits one of the generic formulations, check whether the problem is self-adjoint and positive definite and draw conclusions.
p=1

School of Mechanical EngineeringIran University of Science and Technology
Example 5:Check for self-adjointness,
Let v = u and obtain the energy norm squared
the operator L, and hence the system, is positive definite; all the eigenvalues are positive.

School of Mechanical EngineeringIran University of Science and Technology
Example 6: DISTRIBUTED GYROSCOPIC SYSTEMSDerive the eigen-value problem for a rotating elastic shaft simply supported at both ends.

School of Mechanical EngineeringIran University of Science and Technology
Example 6: DISTRIBUTED GYROSCOPIC SYSTEMSThe boundary conditions:
The eigen-functions of the system are:
The free vibration solution takes the form:

School of Mechanical EngineeringIran University of Science and Technology
Example 6: DISTRIBUTED GYROSCOPIC SYSTEMS
Projection of equation of motion with the introduced solution on each mode results:
where
2 2 2
2 2 2
2 0.2 0.
jj
jj
ab
λ ω λλ λ ω
′ + −Ω − Ω = ′Ω − −Ω
( ) ( )2 1 2 1 2 2, , ,j j j j j ji iλ λ ω λ λ ω− − ′ ′= ± Ω+ = ± Ω−

School of Mechanical EngineeringIran University of Science and Technology
TIMOSHENKO BEAMThe model of a beam including both rotatory inertia
and shear deformation effects is commonly referred to as a Timoshenko beam.
The total deflection w(x,t) of the beam consists of two parts, one caused by bending and one by shear.

School of Mechanical EngineeringIran University of Science and Technology
TIMOSHENKO BEAM
Bendingrotation
Sheardistortion
The moment/bending deformation, and shear/ shearing deformation:
Potential energy
Kinetic energy

School of Mechanical EngineeringIran University of Science and Technology
TIMOSHENKO BEAMTo formulate the boundary-value problem, we
make use of the extended Hamilton's principle,

School of Mechanical EngineeringIran University of Science and Technology
TIMOSHENKO BEAM

School of Mechanical EngineeringIran University of Science and Technology
TIMOSHENKO BEAM

School of Mechanical EngineeringIran University of Science and Technology
TIMOSHENKO BEAM

School of Mechanical EngineeringIran University of Science and Technology
TIMOSHENKO BEAM: The eigenvalueproblemThe boundary-value problem is separable in x and
t, or
where F(t) is harmonic and it satisfies

School of Mechanical EngineeringIran University of Science and Technology
TIMOSHENKO BEAM: The eigenvalueproblem
By analogy with the scalar definitions, the problem is self-adjointif
Moreover, the problem is positive definite if

School of Mechanical EngineeringIran University of Science and Technology
TIMOSHENKO BEAM: The eigenvalueproblem
The integral on the right side is symmetric in u and v. Hence, all systems for which the boundary term is zero are self-adjoint.

School of Mechanical EngineeringIran University of Science and Technology
TIMOSHENKO BEAM: The eigenvalueproblemAssuming that the boundary term is zero and letting v = u, we have

School of Mechanical EngineeringIran University of Science and Technology
Advanced Vibrations
VIBRATION OF PLATESLecture 17
By: H. [email protected]

School of Mechanical EngineeringIran University of Science and Technology
VIBRATION OF PLATES
Plates have bending stiffness in a manner similar to beams in bending.In the case of plates one can think of two
planes of bending, producing in general two distinct curvatures. The small deflection theory of thin plates, called
classical plate theory or Kirchhoff theory, is based on assumptions similar to those used in thin beam or Euler-Bernoulli beam theory.

School of Mechanical EngineeringIran University of Science and Technology
EQUATION OF MOTION: CLASSICAL PLATE THEORYThe elementary theory of plates is based on the following assumptions: The thickness of the plate (h) is small compared to its lateral
dimensions. The middle plane of the plate does not undergo in-plane
deformation. Thus, the midplane remains as the neutral plane after deformation or bending.
The displacement components of the midsurface of the plate are small compared to the thickness of the plate.
The influence of transverse shear deformation is neglected. This implies that plane sections normal to the midsurface before deformation remain normal to the rnidsurface even after deformation or bending.
The transverse normal strain under transverse loading can be neglected. The transverse normal stress is small and hence can be neglected compared to the other components of stress.

School of Mechanical EngineeringIran University of Science and Technology
Strain-Displacement RelationsThe in-plane displacements:
Linear strain-displacement relations:

School of Mechanical EngineeringIran University of Science and Technology
Moment-Displacement RelationsAssuming the plate in a state of plane stress:

School of Mechanical EngineeringIran University of Science and Technology
Resultant Moments:

School of Mechanical EngineeringIran University of Science and Technology
Resultant Shear Forces

School of Mechanical EngineeringIran University of Science and Technology
Equation of motion

School of Mechanical EngineeringIran University of Science and Technology
BOUNDARY CONDITIONS

School of Mechanical EngineeringIran University of Science and Technology
BOUNDARY CONDITIONS

School of Mechanical EngineeringIran University of Science and Technology
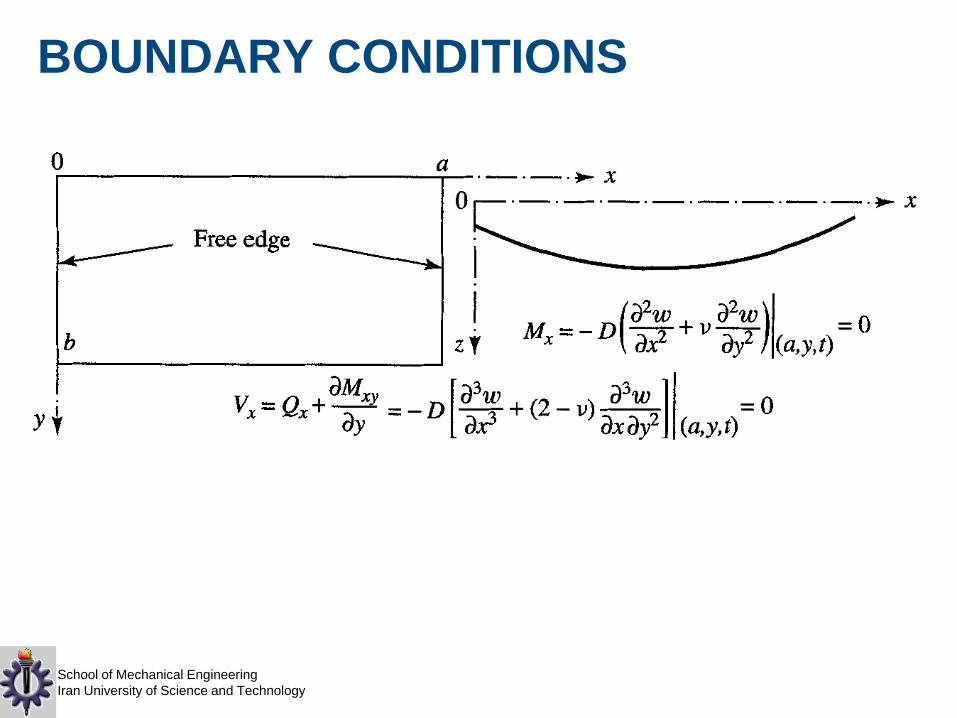
BOUNDARY CONDITIONS: Free Edge
There are three boundary conditions, whereas the equation of motion requires only two:
Kirchhoff showed that the conditions on the shear force and the twisting moment are not independent and can be combined into only one boundary condition.

School of Mechanical EngineeringIran University of Science and Technology
BOUNDARY CONDITIONS: Free Edge
Replacing the twisting moment by an equivalent vertical force.
School of Mechanical EngineeringIran University of Science and Technology
BOUNDARY CONDITIONS

School of Mechanical EngineeringIran University of Science and Technology
BOUNDARY CONDITIONS

School of Mechanical EngineeringIran University of Science and Technology
BOUNDARY CONDITIONS

School of Mechanical EngineeringIran University of Science and Technology
FREE VIBRATION OF RECTANGULAR PLATES

School of Mechanical EngineeringIran University of Science and Technology
FREE VIBRATION OF RECTANGULAR PLATES

School of Mechanical EngineeringIran University of Science and Technology
A Note:

School of Mechanical EngineeringIran University of Science and Technology
FREE VIBRATION OF RECTANGULAR PLATES

School of Mechanical EngineeringIran University of Science and Technology
Solution for a Simply Supported Plate
We find that all the constants Ai except A1 and

School of Mechanical EngineeringIran University of Science and Technology
Solution for a Simply Supported Plate
The initial conditions of the plate are:

School of Mechanical EngineeringIran University of Science and Technology
Solution for a Simply Supported Plate

School of Mechanical EngineeringIran University of Science and Technology
Solution for a Simply Supported Plate

School of Mechanical EngineeringIran University of Science and Technology
Solution for a Simply Supported Plate

School of Mechanical EngineeringIran University of Science and Technology
Advanced Vibrations
VIBRATION OF PLATESLecture 18
By: H. [email protected]

School of Mechanical EngineeringIran University of Science and Technology
Vibrations of Rectangular Plates
The functions X(x) and Y(y) can be separated provided either of the followings are satisfied:

School of Mechanical EngineeringIran University of Science and Technology
Vibrations of Rectangular Plates
These equations can be satisfied only by the trigonometric functions:

School of Mechanical EngineeringIran University of Science and Technology
Vibrations of Rectangular Plates
Assume that the plate is simply supported along edges x =0 and x =a:
Implying:

School of Mechanical EngineeringIran University of Science and Technology
Vibrations of Rectangular PlatesThe various boundary conditions can be stated,
SS-SS-SS-SS, SS-C-SS-C, SS-F-SS-F, SS-C-SS-SS, SS-F-SS-SS, SS-F-SS-C
Assuming:

School of Mechanical EngineeringIran University of Science and Technology
Vibrations of Rectangular Plates
y = 0 and y = b are simply supported:

School of Mechanical EngineeringIran University of Science and Technology
Vibrations of Rectangular Plates
y = 0 and y = b are simply supported:

School of Mechanical EngineeringIran University of Science and Technology
Vibrations of Rectangular Plates
y = 0 and y = b are clamped:

School of Mechanical EngineeringIran University of Science and Technology
Vibrations of Rectangular Plates

School of Mechanical EngineeringIran University of Science and Technology
FORCED VIBRATION OF RECTANGULAR PLATES
the normal modes

School of Mechanical EngineeringIran University of Science and Technology
FORCED VIBRATION OF RECTANGULAR PLATES
Using a modal analysis procedure:

School of Mechanical EngineeringIran University of Science and Technology
FORCED VIBRATION OF RECTANGULAR PLATESThe response of simply supported rectangular plates:

School of Mechanical EngineeringIran University of Science and Technology
Advanced Vibrations
VIBRATION OF PLATESLecture 19
By: H. [email protected]

School of Mechanical EngineeringIran University of Science and Technology
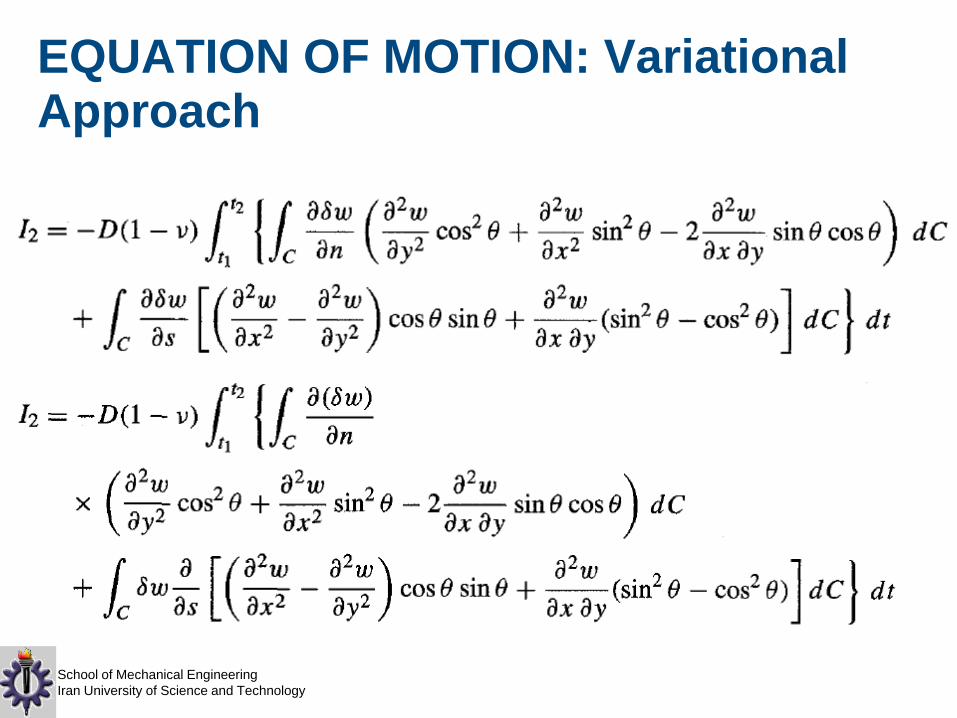
EQUATION OF MOTION: Variational Approach
To develop the strain energy one may assume the state of stress in a thin plate as plane stress:

School of Mechanical EngineeringIran University of Science and Technology
EQUATION OF MOTION: Variational Approach

School of Mechanical EngineeringIran University of Science and Technology
EQUATION OF MOTION: Variational ApproachExtended Hamilton's principle can be written as:

School of Mechanical EngineeringIran University of Science and Technology
EQUATION OF MOTION: Variational Approach
( )∫∫∫ +=
∂∂
−∂∂
CA
dyFdxFdydxyF
xF
2121
Green’s Theorem

School of Mechanical EngineeringIran University of Science and Technology
EQUATION OF MOTION: Variational Approach

School of Mechanical EngineeringIran University of Science and Technology
EQUATION OF MOTION: Variational Approach
School of Mechanical EngineeringIran University of Science and Technology
EQUATION OF MOTION: Variational Approach

School of Mechanical EngineeringIran University of Science and Technology
EQUATION OF MOTION: Variational Approach

School of Mechanical EngineeringIran University of Science and Technology
EQUATION OF MOTION: Variational Approach


















