
L’energia nella gestione delle acque Il progetto faro dell ...
Operating Systems and Distributed Systems
Gestione dell’ I/O e del Disco
Operating Systems and Distributed Systems 2
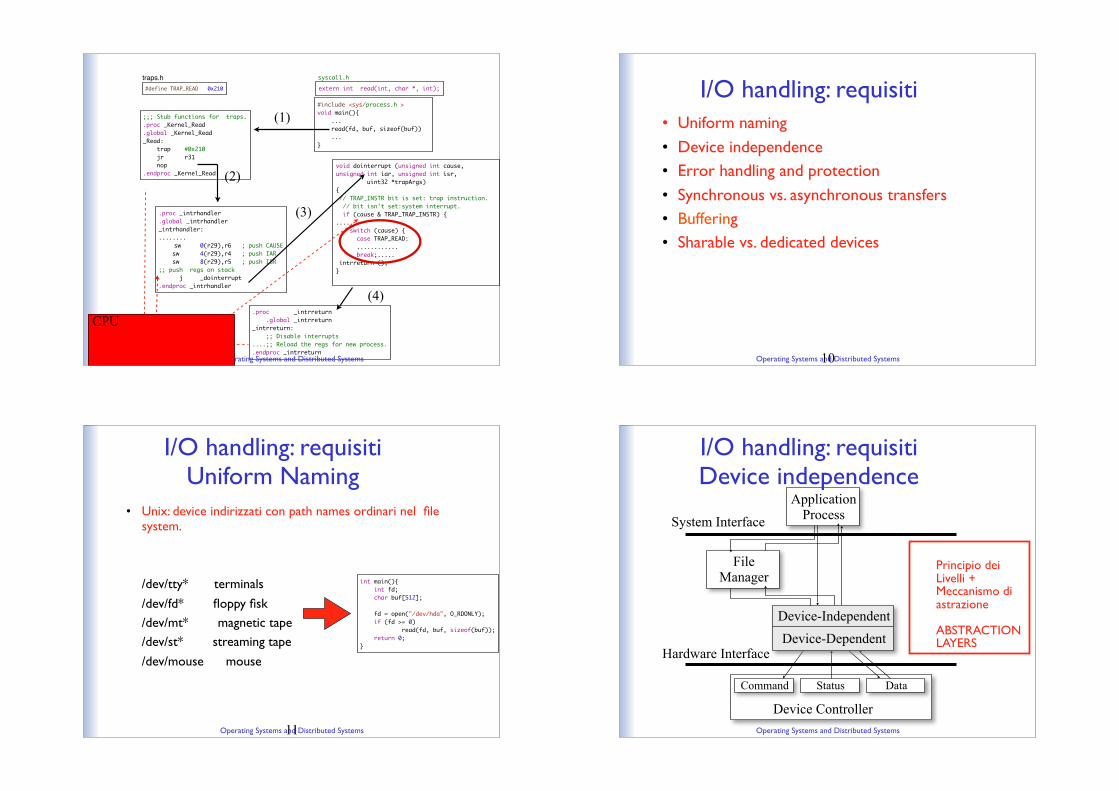
Dispositivi di I/O
Operating Systems and Distributed Systems
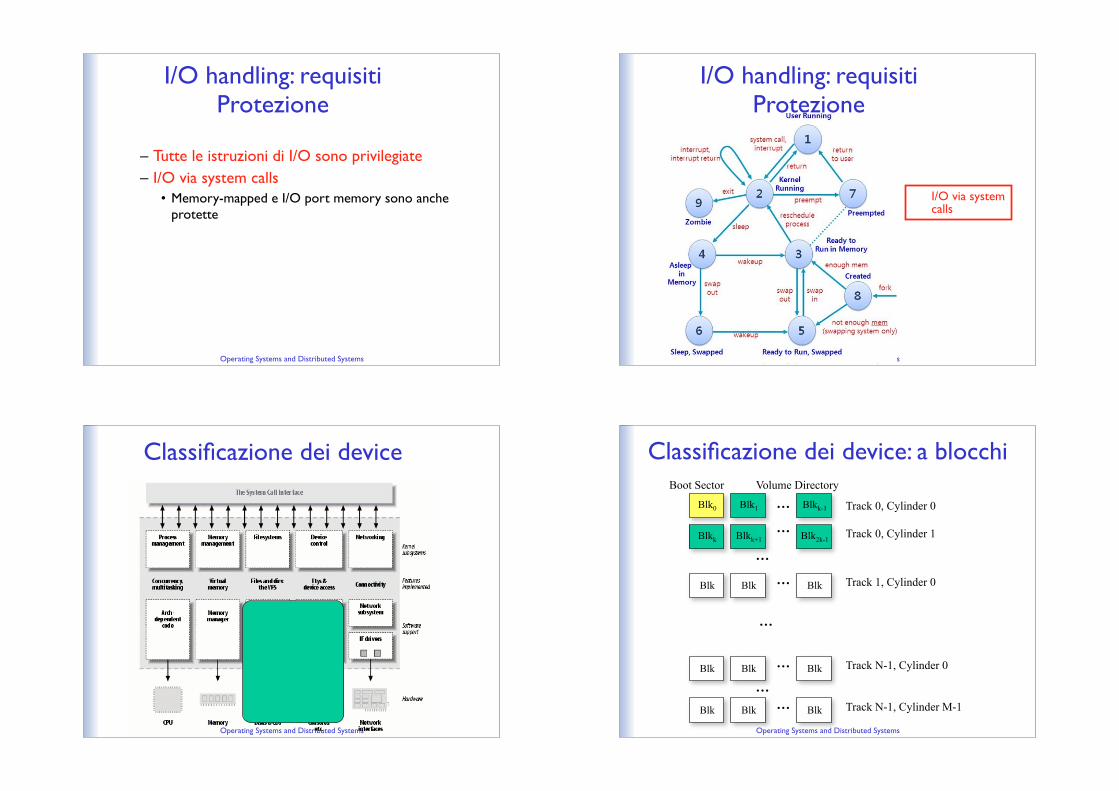
Caratteristiche degli I/O Devices
Operating Systems and Distributed Systems 4
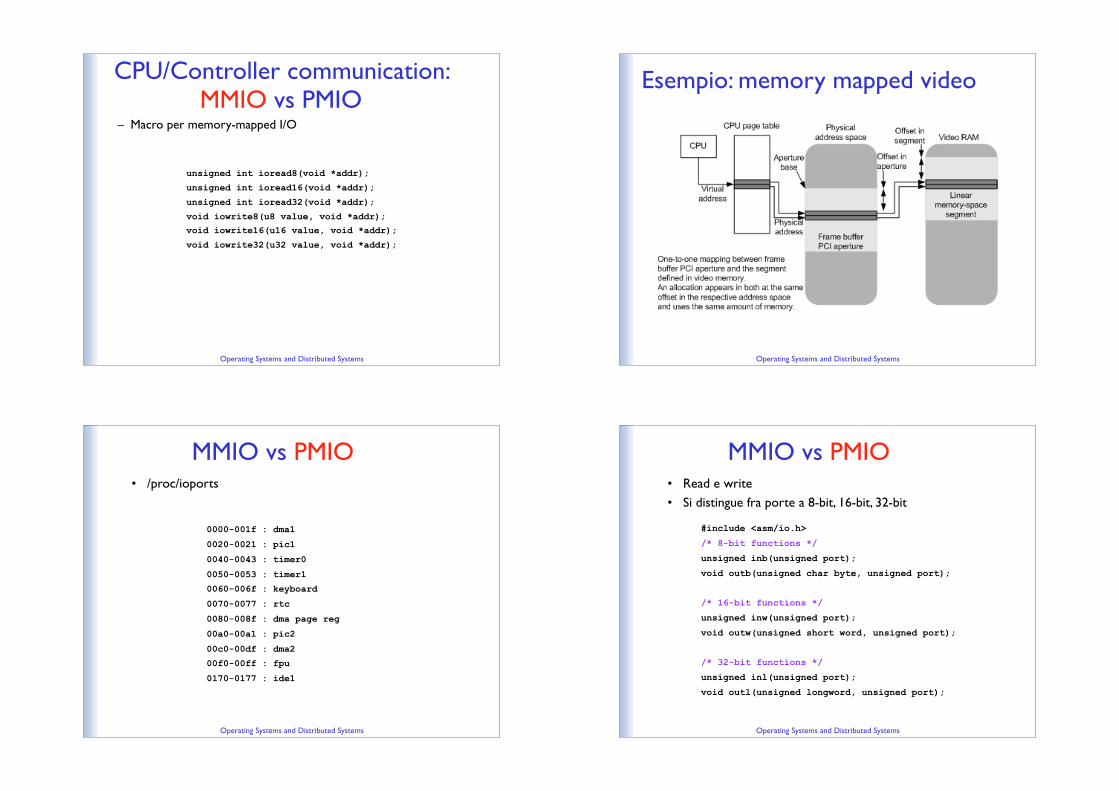
Dispositivi di I/O: la vista hardware

Operating Systems and Distributed Systems
Perchè funziona su svariati dispositivi?
Dispositivi di I/O: la vista del processo
int main(){
! int fd;
! char buf[512];
!
! fd = open("/dev/hda", O_RDONLY);
! if (fd >= 0)
! ! read(fd, buf, sizeof(buf));
! return 0;
}
Programma CopyFile.c
Operating Systems and Distributed Systems
Application I/O Interface
Operating Systems and Distributed Systems
Application I/O Interface
Operating Systems and Distributed Systems
void run_new_thread() {
! newThread = Schedule();
! Switch(curThread, newThread);
! ThreadHouseKeeping();
}
void Switch(tCur,tNew) {
! /* Unload old thread */
! TCB[tCur].regs.r7 = CPU.r7;
! …
! TCB[tCur].regs.r0 = CPU.r0;
! TCB[tCur].regs.sp = CPU.sp;
! TCB[tCur].regs.retpc = CPU.retpc; /*return addr*/
! /* Load and execute new thread */
! CPU.r7 = TCB[tNew].regs.r7;
! …
! CPU.r0 = TCB[tNew].regs.r0;
! CPU.sp = TCB[tNew].regs.sp;
! CPU.retpc = TCB[tNew].regs.retpc;
! return; /* Return to CPU.retpc */
}
int main(){
! int fd;
! char buf[512];
!
! fd = open("/dev/hda", O_RDONLY);
! if (fd >= 0)
! ! read(fd, buf, sizeof(buf));
! return 0;
}
Programma CopyFile.c
void kernel_read {
! ........;
}
Dispositivi di I/O: la vista del SO
#include <sys/process.h >
void main(){
! ...
! read(fd, buf, sizeof(buf))
! ...
}
extern int! read(int, char *, int);
syscall.h
;;; Stub functions for traps.
.proc _Kernel_Read
.global _Kernel_Read
_Read:! !
! trap! #0x210
! jr! r31
! nop
.endproc _Kernel_Read
#define TRAP_READ! 0x210
traps.h
.proc _intrhandler
.global _intrhandler
_intrhandler:
........
sw! 0(r29),r6! ; push CAUSE
! sw! 4(r29),r4! ; push IAR
! sw! 8(r29),r5! ; push ISR
;; push regs on stack
j! _dointerrupt!
.endproc _intrhandler
void dointerrupt (unsigned int cause,
unsigned int iar, unsigned int isr,
! uint32 *trapArgs)
{
// TRAP_INSTR bit is set: trap instruction.
// bit isn't set:system interrupt.
if (cause & TRAP_TRAP_INSTR) {
.....
switch (cause) {
case TRAP_READ:
............
break;.....
intrreturn ();
}
.proc! _intrreturn
! .global!_intrreturn
_intrreturn:
! ;; Disable interrupts
....;; Reload the regs for new process.
.endproc _intrreturnOperating Systems and Distributed Systems
CAUSE registerSTATUS register
CPU
(1)
(2)
(3)
(4)
Operating Systems and Distributed Systems10
I/O handling: requisiti• Uniform naming
• Device independence
• Error handling and protection
• Synchronous vs. asynchronous transfers
• Buffering
• Sharable vs. dedicated devices
Operating Systems and Distributed Systems11
I/O handling: requisiti Uniform Naming
• Unix: device indirizzati con path names ordinari nel file system.
/dev/tty* terminals
/dev/fd* floppy fisk
/dev/mt* magnetic tape
/dev/st* streaming tape
/dev/mouse mouse
int main(){
! int fd;
! char buf[512];
!
! fd = open("/dev/hda", O_RDONLY);
! if (fd >= 0)
! ! read(fd, buf, sizeof(buf));
! return 0;
}
Operating Systems and Distributed Systems
ApplicationProcess
FileManager
Device Controller
Command Status Data
Hardware Interface
System Interface
Device-Independent
Device-Dependent
Principio dei Livelli + Meccanismo di astrazione
ABSTRACTION LAYERS
I/O handling: requisiti Device independence
Operating Systems and Distributed Systems
– Tutte le istruzioni di I/O sono privilegiate
– I/O via system calls• Memory-mapped e I/O port memory sono anche
protette
I/O handling: requisitiProtezione
Operating Systems and Distributed Systems
I/O via system calls
I/O handling: requisitiProtezione
Operating Systems and Distributed Systems
Classificazione dei device
Operating Systems and Distributed Systems
Blk0 Blk1 Blkk-1
Blkk Blkk+1 Blk2k-1
Track 0, Cylinder 0
Track 0, Cylinder 1
Blk Blk Blk Track 1, Cylinder 0
Blk Blk Blk Track N-1, Cylinder 0
Blk Blk Blk Track N-1, Cylinder M-1
…
…
…
…
…
…
…
…
Boot Sector Volume Directory
Classificazione dei device: a blocchi

Operating Systems and Distributed Systems
• Tastiere, porte seriali, ecc
• Deliver/accept stream di caratteri (bytes) – get, put
Classificazione dei device: a caratteri
Operating Systems and Distributed Systems
• Ridurre context switch
• Ridurre data copying
• Ridurre interrupt usando trasferimenti ampi, smart controllers, polling
• Usare DMA
• Bilanciare la performance di CPU, memoria, bus, I/O per max throughput
Il problema dell’ I/O Performance
Operating Systems and Distributed Systems19
Port-mapped IO (PMIO)
I/O & memory
space
Separati
0xFFF…
0
Memory
I/O ports
Memory-mapped I/O
(MMIO)
Hybrid: entrambi
MMIO &
PMIO
MMIO vs PMIO• I dispositivi hanno indirizzi
Operating Systems and Distributed Systems
CPU/Controller communication: MMIO vs PMIO
! more /proc/iomem00000000-0009b7ff : System RAM
0009b800-0009ffff : reserved
000a0000-000bffff : Video RAM area
000c0000-000c7fff : Video ROM
000c8000-000c8fff : Adapter ROM
000f0000-000fffff : System ROM
00100000-7ff6ffff : System RAM
00100000-002c7f2f : Kernel code
002c7f30-003822ff : Kernel data
7ff70000-7ff77fff : ACPI Tables
7ff78000-7ff7ffff : ACPI Non-volatile Storage
Operating Systems and Distributed Systems
CPU/Controller communication: MMIO vs PMIO
– Macro per memory-mapped I/O
unsigned int ioread8(void *addr);
unsigned int ioread16(void *addr);
unsigned int ioread32(void *addr);
void iowrite8(u8 value, void *addr);
void iowrite16(u16 value, void *addr);
void iowrite32(u32 value, void *addr);
Operating Systems and Distributed Systems
Esempio: memory mapped video
Operating Systems and Distributed Systems
• /proc/ioports
MMIO vs PMIO
0000-001f : dma1
0020-0021 : pic1
0040-0043 : timer0
0050-0053 : timer1
0060-006f : keyboard
0070-0077 : rtc
0080-008f : dma page reg
00a0-00a1 : pic2
00c0-00df : dma2
00f0-00ff : fpu
0170-0177 : ide1
Operating Systems and Distributed Systems
• Read e write
• Si distingue fra porte a 8-bit, 16-bit, 32-bit
MMIO vs PMIO
#include <asm/io.h>
/* 8-bit functions */
unsigned inb(unsigned port);
void outb(unsigned char byte, unsigned port);
/* 16-bit functions */
unsigned inw(unsigned port);
void outw(unsigned short word, unsigned port);
/* 32-bit functions */
unsigned inl(unsigned port);
void outl(unsigned longword, unsigned port);
Operating Systems and Distributed Systems
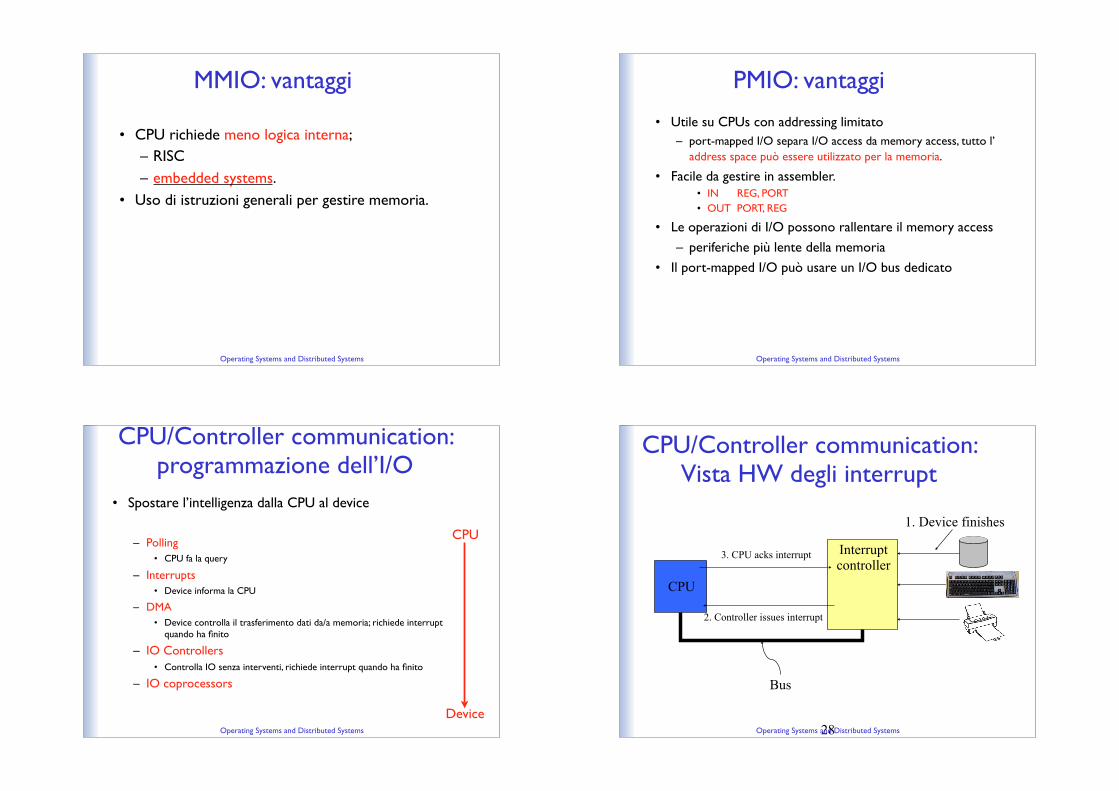
MMIO: vantaggi
• CPU richiede meno logica interna;
– RISC
– embedded systems.
• Uso di istruzioni generali per gestire memoria.
Operating Systems and Distributed Systems
PMIO: vantaggi
• Utile su CPUs con addressing limitato
– port-mapped I/O separa I/O access da memory access, tutto l’
address space può essere utilizzato per la memoria.
• Facile da gestire in assembler.• IN!!!!! REG, PORT
• OUT! PORT, REG
• Le operazioni di I/O possono rallentare il memory access
– periferiche più lente della memoria
• Il port-mapped I/O può usare un I/O bus dedicato
Operating Systems and Distributed Systems
CPU/Controller communication: programmazione dell’I/O
• Spostare l’intelligenza dalla CPU al device
– Polling
• CPU fa la query
– Interrupts
• Device informa la CPU
– DMA
• Device controlla il trasferimento dati da/a memoria; richiede interrupt quando ha finito
– IO Controllers
• Controlla IO senza interventi, richiede interrupt quando ha finito
– IO coprocessors
CPU
DeviceOperating Systems and Distributed Systems28
CPU/Controller communication: Vista HW degli interrupt
Bus
CPU
Interruptcontroller
1. Device finishes
2. Controller issues interrupt
3. CPU acks interrupt
Operating Systems and Distributed Systems29
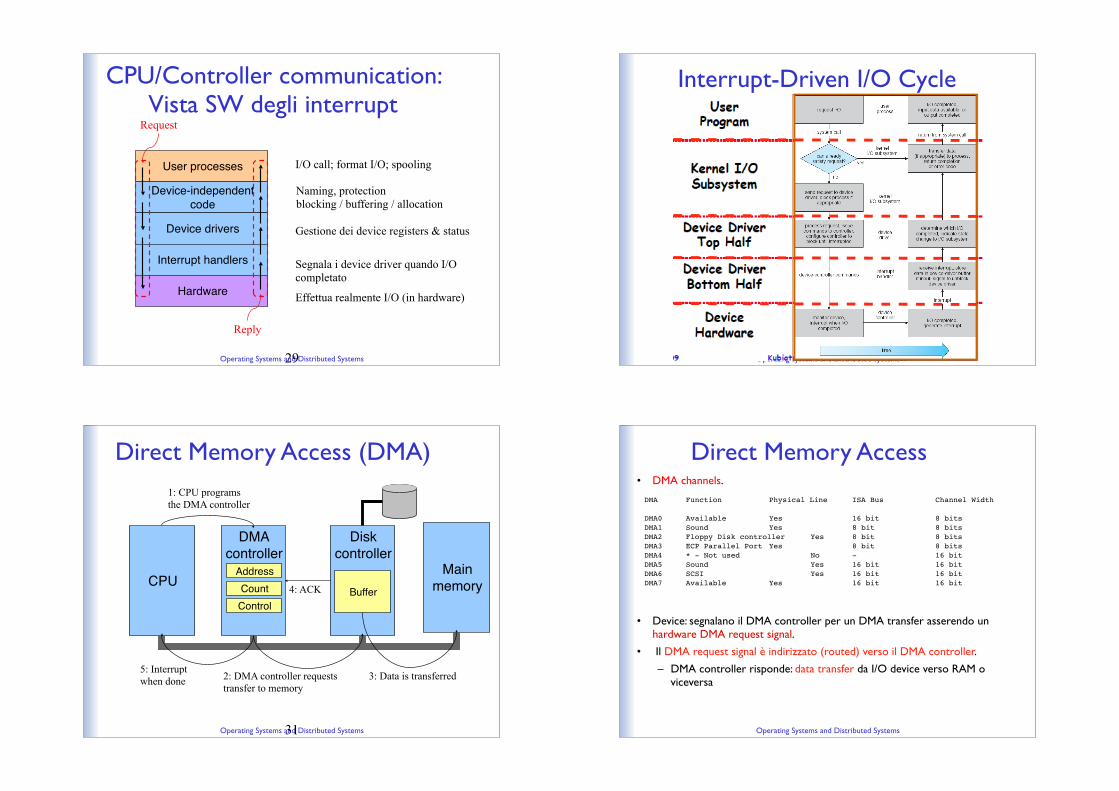
User processes
Device-independent
code
Device drivers
Interrupt handlers
Hardware
Request
Reply
I/O call; format I/O; spooling
Naming, protection
blocking / buffering / allocation
Gestione dei device registers & status
Segnala i device driver quando I/O
completato
Effettua realmente I/O (in hardware)
CPU/Controller communication: Vista SW degli interrupt
Operating Systems and Distributed Systems
Interrupt-Driven I/O Cycle
Operating Systems and Distributed Systems31
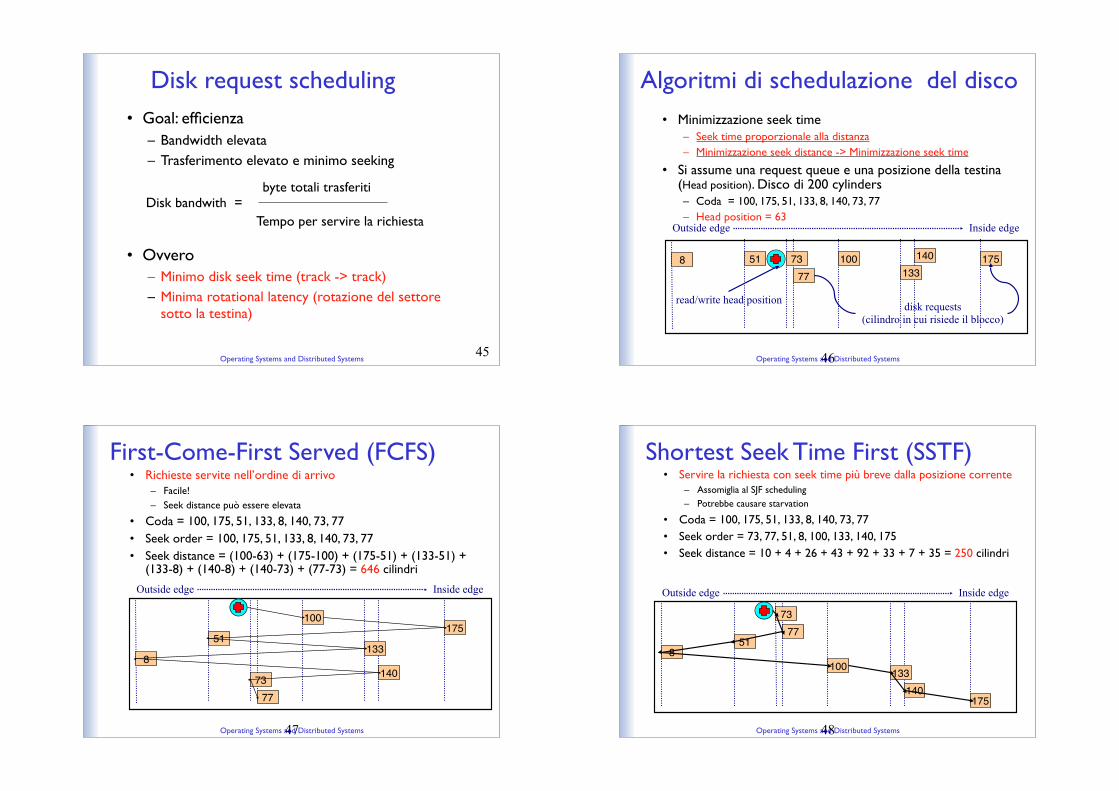
Direct Memory Access (DMA)
CPU
DMA
controller
Disk
controllerMain
memoryAddress
Count
Control
1: CPU programs
the DMA controller
2: DMA controller requests
transfer to memory
Buffer
3: Data is transferred
4: ACK
5: Interrupt
when done
Operating Systems and Distributed Systems
Direct Memory Access• DMA channels.
• Device: segnalano il DMA controller per un DMA transfer asserendo un hardware DMA request signal.
• Il DMA request signal è indirizzato (routed) verso il DMA controller.
– DMA controller risponde: data transfer da I/O device verso RAM o viceversa
DMA! Function!! Physical Line! ISA Bus! ! Channel Width
DMA0! Available!! Yes! ! 16 bit! ! 8 bits
DMA1! Sound! ! Yes! ! 8 bit! ! 8 bits
DMA2! Floppy Disk controller! Yes! 8 bit! ! 8 bits
DMA3! ECP Parallel Port! Yes! ! 8 bit! ! 8 bits
DMA4! * - Not used! ! No! -! ! 16 bit
DMA5! Sound! ! ! Yes! 16 bit! ! 16 bit
DMA6! SCSI! ! ! Yes! 16 bit! ! 16 bit
DMA7! Available!! Yes! ! 16 bit! ! 16 bit

Operating Systems and Distributed Systems
Direct Memory Access
Operating Systems and Distributed Systems
Direct Memory Access: flyby
Operating Systems and Distributed Systems
Direct Memory Access: F&D
Operating Systems and Distributed Systems
Disk drive: struttura
sector
cylinder
platter
spindle
track
head
actuator
surfaces

Operating Systems and Distributed Systems
Dispositivi a blocchi: Memorizzazione di massa– Drive ruota da 60 a 200 volte per secondo (o 3600 RPM, revolutions Per
Minute)
– Transfer rate : data flow tra drive e computer
• TR = MB/sec
– Positioning time: muovere il braccio al cilindro (seek time, ST) + rotazione settore sotto testina (rotational latency, RL)
– Overhead: dovuta al controller (senza waiting queues)
<Tacc>= <ST> + <RL> + TR + Toverhead
• Seek time dominaOperating Systems and Distributed Systems
Mass storage: astrazioni del sistema operativo
• Hard disk abstraction:– Raw device – un array di data blocks.
– File system – il SO mette in coda e schedula le richieste delle varie applicazioni.
Operating Systems and Distributed Systems39
Disk “addressing”
• Due possibilità:
– Cylinder/track/sector
– Sequential numbering
Operating Systems and Distributed Systems40
Costruire “dischi” migliori• Dischi limitati dalla meccanica
• Affidabilità
• Soluzione: distribuire i dati su più dischi:
– Data stored across drives (striping)
–

Operating Systems and Distributed Systems41
RAIDs, RAIDs, e RAIDs
strip stripStripe
RAID 0
(Redudant Array of Inexpensive Disks
RAID 1
(Mirrored copies)
RAID 2
(Striped with parity)
RAID 3
(Parity rotates through disks)
Operating Systems and Distributed Systems42
Struttura di un disk sector
• Preamble: informazione sul settore
– Sector number & location information
• Dati: 256, 512, or 1024 bytes
• ECC (Error Correcting Code)
Preamble Data ECC
Operating Systems and Distributed Systems
Device-status Table
Che cosa c’e’ in una disk request?
Operating Systems and Distributed Systems44
Che cosa c’è in una disk request?
Operating Systems and Distributed Systems45
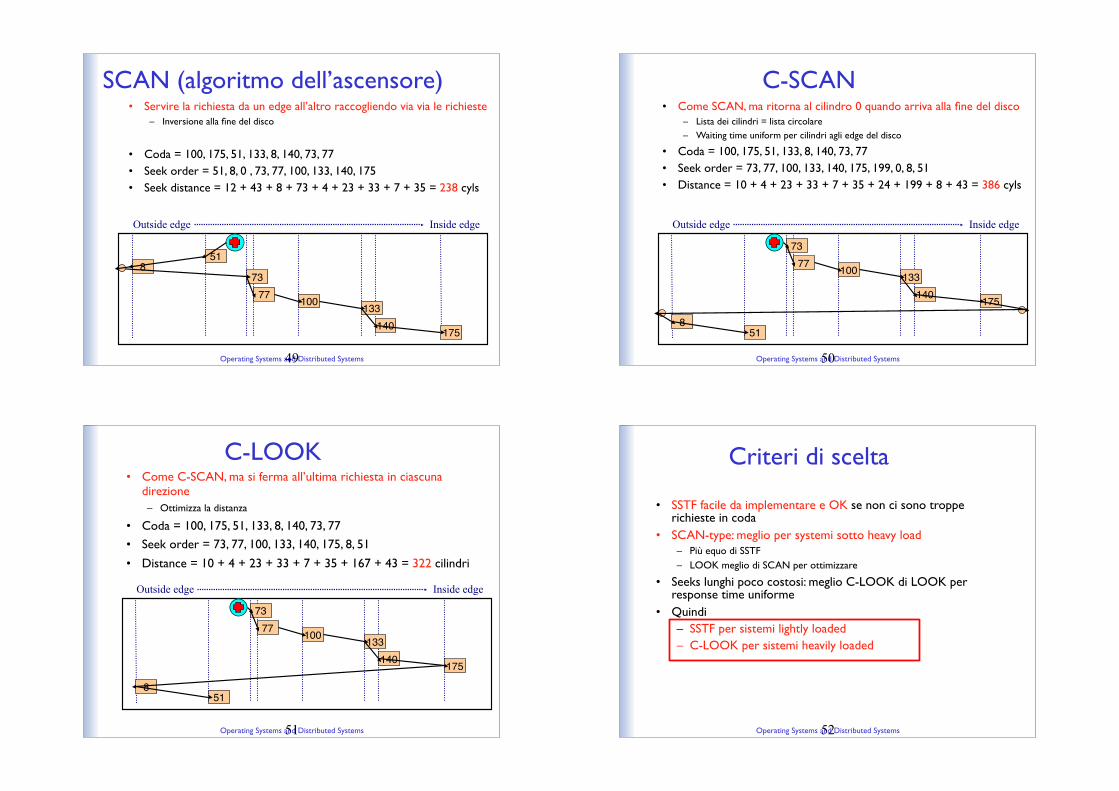
Disk request scheduling
• Goal: efficienza
– Bandwidth elevata
– Trasferimento elevato e minimo seeking
• Ovvero
– Minimo disk seek time (track -> track)
– Minima rotational latency (rotazione del settore sotto la testina)
byte totali trasferiti
Tempo per servire la richiesta
Disk bandwith =
Operating Systems and Distributed Systems46
175
read/write head positiondisk requests
(cilindro in cui risiede il blocco)
Outside edge Inside edge
140
133
10073
77
8 51
Algoritmi di schedulazione del disco
• Minimizzazione seek time– Seek time proporzionale alla distanza
– Minimizzazione seek distance -> Minimizzazione seek time
• Si assume una request queue e una posizione della testina (Head position). Disco di 200 cylinders– Coda = 100, 175, 51, 133, 8, 140, 73, 77
– Head position = 63
Operating Systems and Distributed Systems47
175
Outside edge Inside edge
140
133
100
73
77
8
51
First-Come-First Served (FCFS)• Richieste servite nell’ordine di arrivo
– Facile!
– Seek distance può essere elevata
• Coda = 100, 175, 51, 133, 8, 140, 73, 77
• Seek order = 100, 175, 51, 133, 8, 140, 73, 77
• Seek distance = (100-63) + (175-100) + (175-51) + (133-51) +(133-8) + (140-8) + (140-73) + (77-73) = 646 cilindri
Operating Systems and Distributed Systems48
175
Outside edge Inside edge
140
133100
73
77
851
Shortest Seek Time First (SSTF)• Servire la richiesta con seek time più breve dalla posizione corrente
– Assomiglia al SJF scheduling
– Potrebbe causare starvation
• Coda = 100, 175, 51, 133, 8, 140, 73, 77
• Seek order = 73, 77, 51, 8, 100, 133, 140, 175
• Seek distance = 10 + 4 + 26 + 43 + 92 + 33 + 7 + 35 = 250 cilindri
Operating Systems and Distributed Systems49
175
Outside edge Inside edge
140
133100
73
77
851
SCAN (algoritmo dell’ascensore)• Servire la richiesta da un edge all’altro raccogliendo via via le richieste
– Inversione alla fine del disco
• Coda = 100, 175, 51, 133, 8, 140, 73, 77
• Seek order = 51, 8, 0 , 73, 77, 100, 133, 140, 175
• Seek distance = 12 + 43 + 8 + 73 + 4 + 23 + 33 + 7 + 35 = 238 cyls
Operating Systems and Distributed Systems50
175
Outside edge Inside edge
140
133100
73
77
851
C-SCAN• Come SCAN, ma ritorna al cilindro 0 quando arriva alla fine del disco
– Lista dei cilindri = lista circolare
– Waiting time uniform per cilindri agli edge del disco
• Coda = 100, 175, 51, 133, 8, 140, 73, 77
• Seek order = 73, 77, 100, 133, 140, 175, 199, 0, 8, 51
• Distance = 10 + 4 + 23 + 33 + 7 + 35 + 24 + 199 + 8 + 43 = 386 cyls
Operating Systems and Distributed Systems51
175
Outside edge Inside edge
140
133100
73
77
851
C-LOOK• Come C-SCAN, ma si ferma all’ultima richiesta in ciascuna
direzione
– Ottimizza la distanza
• Coda = 100, 175, 51, 133, 8, 140, 73, 77
• Seek order = 73, 77, 100, 133, 140, 175, 8, 51
• Distance = 10 + 4 + 23 + 33 + 7 + 35 + 167 + 43 = 322 cilindri
Operating Systems and Distributed Systems52
Criteri di scelta
• SSTF facile da implementare e OK se non ci sono troppe richieste in coda
• SCAN-type: meglio per systemi sotto heavy load– Più equo di SSTF
– LOOK meglio di SCAN per ottimizzare
• Seeks lunghi poco costosi: meglio C-LOOK di LOOK per response time uniforme
• Quindi
– SSTF per sistemi lightly loaded
– C-LOOK per sistemi heavily loaded
Operating Systems and Distributed Systems
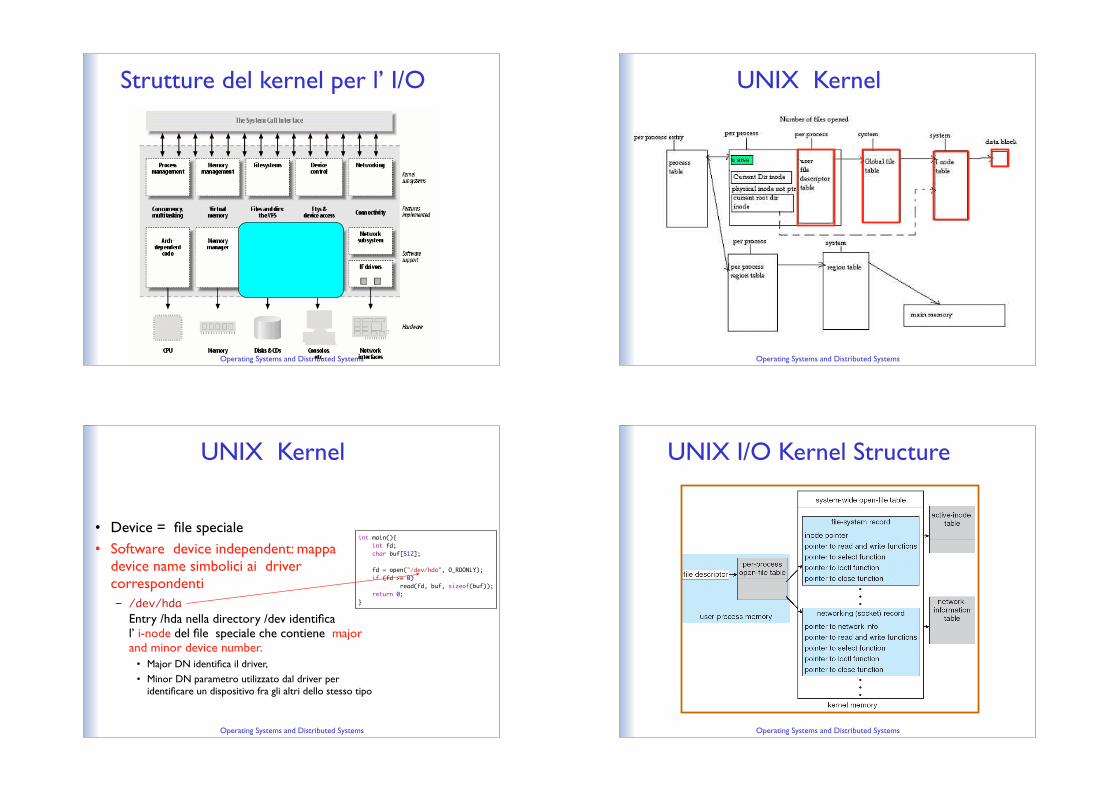
Strutture del kernel per l’ I/O
Operating Systems and Distributed Systems
UNIX Kernel
Operating Systems and Distributed Systems
• Device = file speciale
• Software device independent: mappa device name simbolici ai driver correspondenti– /dev/hda
Entry /hda nella directory /dev identifica l’ i-node del file speciale che contiene major and minor device number.
• Major DN identifica il driver,
• Minor DN parametro utilizzato dal driver per identificare un dispositivo fra gli altri dello stesso tipo
UNIX Kernel
int main(){
! int fd;
! char buf[512];
!
! fd = open("/dev/hda", O_RDONLY);
! if (fd >= 0)
! ! read(fd, buf, sizeof(buf));
! return 0;
}
Operating Systems and Distributed Systems
UNIX I/O Kernel Structure
Operating Systems and Distributed Systems
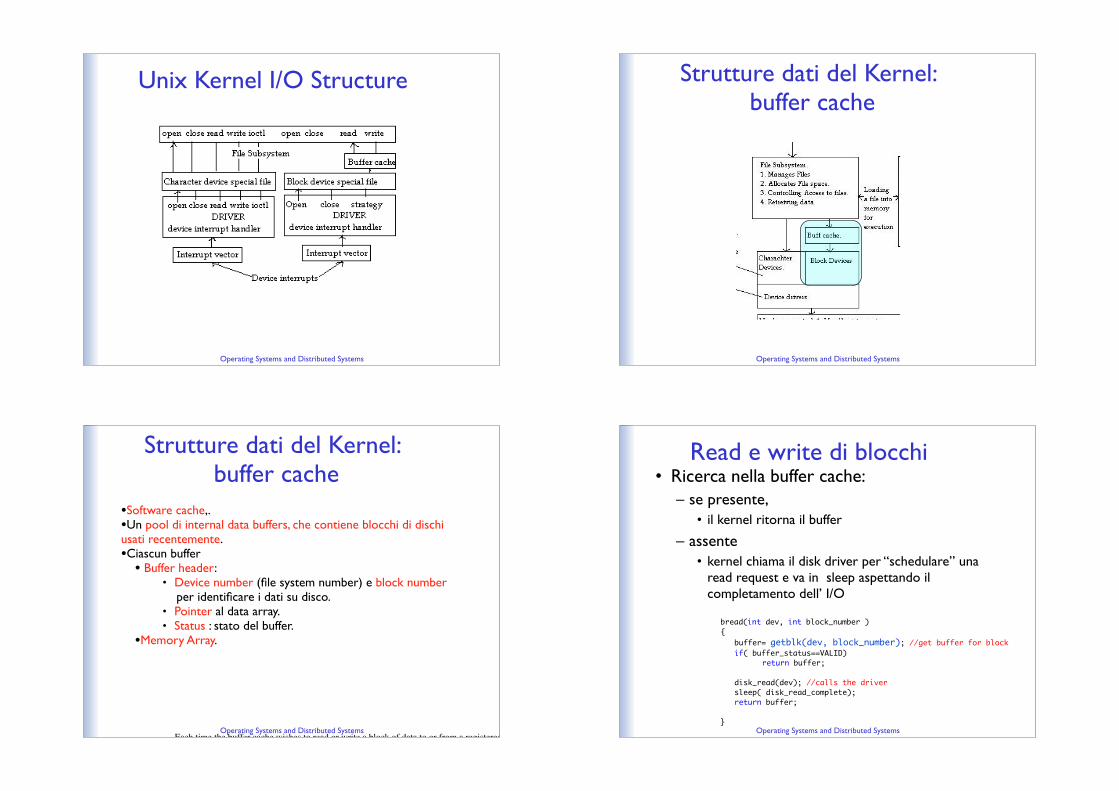
Unix Kernel I/O Structure
Operating Systems and Distributed Systems
Strutture dati del Kernel: buffer cache
•Software cache,.•Un pool di internal data buffers, che contiene blocchi di dischi usati recentemente.•Ciascun buffer
• Buffer header: •!!!Device number (file system number) e block number
per identificare i dati su disco.•!!!Pointer al data array.•!!!Status : stato del buffer.
•Memory Array.
Operating Systems and Distributed SystemsEach time the buffer cache wishes to read or write a block of data to or from a registered device it adds a
request data structure onto its blk_dev_struct.
each request has a pointer to one or more buffer_head data structures, each one a request to read or write a
block of data. The buffer_head structures are locked (by the buffer cache) and there may be a process waiting
on the block operation to this buffer to complete. Each request structure is allocated from a static list, the
all_requests list. If the request is being added to an empty request list, the driver's request function is called to
start processing the request queue. Otherwise the driver will simply process every request on the request list.
Once the device driver has completed a request it must remove each of the buffer_head structures from the
request structure, mark them as up to date and unlock them. This unlocking of the buffer_head will wake up
any process that has been sleeping waiting for the block operation to complete.
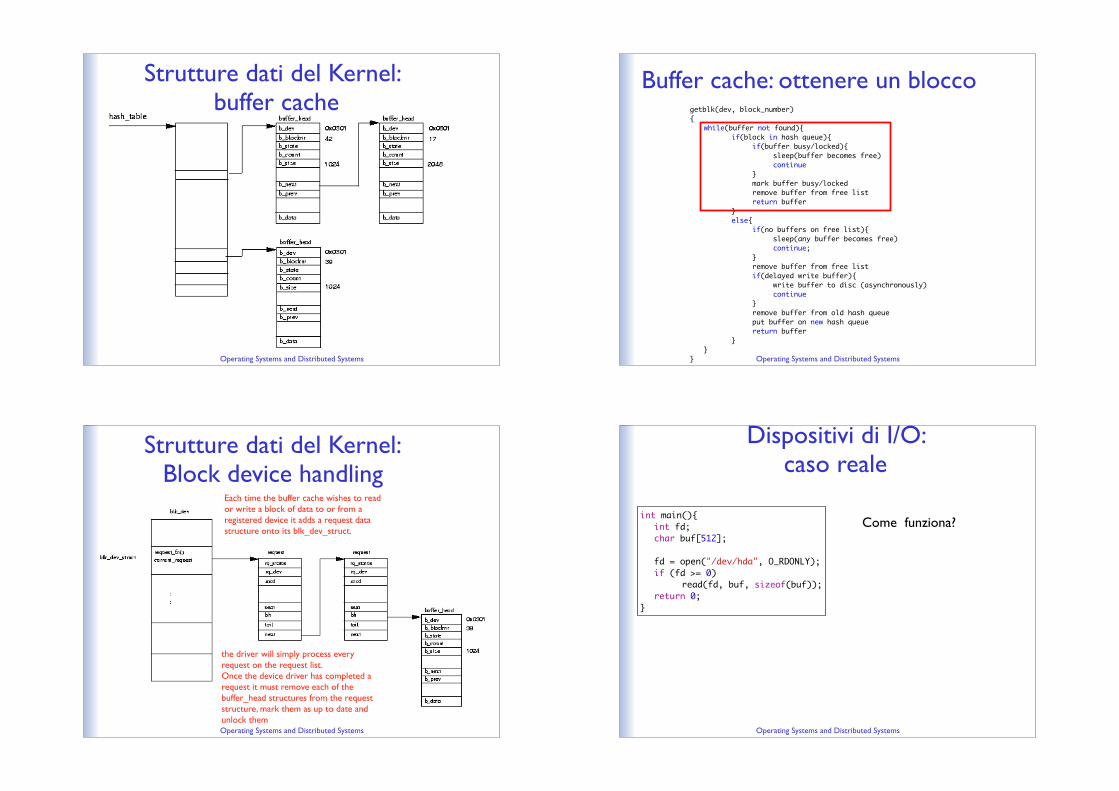
Strutture dati del Kernel: buffer cache
Operating Systems and Distributed Systems
Read e write di blocchi• Ricerca nella buffer cache:
– se presente, • il kernel ritorna il buffer
– assente • kernel chiama il disk driver per “schedulare” una
read request e va in sleep aspettando il completamento dell’ I/O
bread(int dev, int block_number )
{
! buffer= getblk(dev, block_number); //get buffer for block! if( buffer_status==VALID)
! ! return buffer;
!
! disk_read(dev); //calls the driver
! sleep( disk_read_complete);
! return buffer;
! !
}
Operating Systems and Distributed Systems
Strutture dati del Kernel: buffer cache getblk(dev, block_number)
{
! while(buffer not found){
! ! if(block in hash queue){
! ! ! if(buffer busy/locked){
! ! ! ! sleep(buffer becomes free)
! ! ! ! continue
! ! ! }
! ! ! mark buffer busy/locked
! ! ! remove buffer from free list
! ! ! return buffer
! ! }
! ! else{
! ! ! if(no buffers on free list){
! ! ! ! sleep(any buffer becomes free)
! ! ! ! continue;
! ! ! }
! ! ! remove buffer from free list
! ! ! if(delayed write buffer){
! ! ! ! write buffer to disc (asynchronously)
! ! ! ! continue
! ! ! }
! ! ! remove buffer from old hash queue
! ! ! put buffer on new hash queue
! ! ! return buffer
! ! }
! }
} Operating Systems and Distributed Systems
Buffer cache: ottenere un blocco
Operating Systems and Distributed Systems
Strutture dati del Kernel:Block device handling
Each time the buffer cache wishes to read or write a block of data to or from a registered device it adds a request data structure onto its blk_dev_struct.
the driver will simply process every request on the request list. Once the device driver has completed a request it must remove each of the buffer_head structures from the request structure, mark them as up to date and unlock them
Operating Systems and Distributed Systems
Come funziona?
Dispositivi di I/O: caso reale
int main(){
! int fd;
! char buf[512];
!
! fd = open("/dev/hda", O_RDONLY);
! if (fd >= 0)
! ! read(fd, buf, sizeof(buf));
! return 0;
}

Operating Systems and Distributed Systems
Come funziona?
Dispositivi di I/O: caso reale
int main(){
! int fd;
! char buf[512];
!
! fd = open("/dev/hda", O_RDONLY);
! if (fd >= 0)
! ! read(fd, buf, sizeof(buf));
! return 0;
}
sys_read(unsigned int fd, char *buf, size_t count) {! struct file *file = fget(fd);
! return file->f_op->read(file, buf, count, &file->f_pos);}
sys_read(unsigned int fd, char *buf, size_t count) {! struct file *file = fget(fd);
! return file->f_op->read(file, buf, count, &file->f_pos);}
block_read(struct file *filp, char *buf, size_t count, loff_t *ppos) {! struct inode *inode = filp->f_dentry->d_inode;
! kdev_t dev = inode->i_rdev;
! ssize_t blocksize = blksize_size[MAJOR(dev)][MINOR(dev)];
! ......
! getblk(dev, block++, blocksize);! ! !
ll_rw_block(READ, bhrequest, bhreq);! ! /* wait for I/O to complete,
! ! copy result to user space,
! ! increment read and *ppos, decrement left */
!
}
Operating Systems and Distributed Systems
Caso reale(1)
getblk(kdev_t dev, int block, int size) {
! //finds the buffer that already
contains the required data if we are
lucky,
! //and otherwise a buffer that is
going to be used.
}
ll_rw_block(int rw, int nr, struct buffer_head * bhs[]) {
! //real I/O is started
! ! for (i = 0; i < nr; i++) {
! ! struct buffer_head *bh = bhs[i];
! !
! ! bh->b_end_io = end_buffer_io_sync;//specifies
what to do when I/O is finished
! !
! ! submit_bh(rw, bh);! }
}
submit_bh(int rw, struct buffer_head *bh) {
! .....
! generic_make_request(rw, bh);}
generic_make_request (int rw, struct buffer_head *bh) {
! //finds the right queue and calls the request function
for that queue
! request_queue_t *q;
!
! q = blk_get_queue(bh->b_rdev);
! q->make_request_fn(q, rw, bh);}
ide_do_request(ide_hwgroup_t *hwgroup, int masked_irq) {
! ide_startstop_t startstop;
!
! while (!hwgroup->busy) {
! ! hwgroup->busy = 1;
! ! drive = choose_drive(hwgroup);
! ! startstop = start_request(drive);
! ! if (startstop == ide_stopped)
! ! ! hwgroup->busy = 0;
! }
}Operating Systems and Distributed Systems
Caso reale(2)ll_rw_block(int rw, int nr, struct buffer_head * bhs[]) {! //real I/O is started
! ! for (i = 0; i < nr; i++) {
! ! struct buffer_head *bh = bhs[i];
! !
! ! bh->b_end_io = end_buffer_io_sync;//specifies what to do when I/O is finished
! ! submit_bh(rw, bh);! }
}
start_request (ide_drive_t *drive) {! .......
! rq = blkdev_entry_next_request(&drive-
>queue.queue_head);
! block = rq->sector;
! block += drive->part[minor & PARTN_MASK].start_sect;
! SELECT_DRIVE(hwif, drive);
! return (DRIVER(drive)->do_request(drive, rq, block));}
ide_startstop_t do_rw_disk (ide_drive_t *drive, struct request *rq, unsigned long block) {! ......
! track = block / drive->sect;
! sect = block % drive->sect + 1;
! OUT_BYTE(sect,IDE_SECTOR_REG);
! head = track % drive->head;
! cyl = track / drive->head;
! .................
! if (rq->cmd == READ) {
! !
! ! //sets up read_intr() to be called when we get an interrupt
! ! ide_set_handler(drive, &read_intr, WAIT_CMD, NULL); ! !
! ! OUT_BYTE(WIN_READ, IDE_COMMAND_REG);
! ! return ide_started;
! }
! ...
}
Operating Systems and Distributed Systems
Caso reale(3)ide_do_request(ide_hwgroup_t *hwgroup, int masked_irq) {
! ide_startstop_t startstop;
!
! while (!hwgroup->busy) {
! ! hwgroup->busy = 1;
! ! drive = choose_drive(hwgroup);
! ! startstop = start_request(drive);
! ! if (startstop == ide_stopped)
! ! ! hwgroup->busy = 0;
! }
}
Operating Systems and Distributed Systems
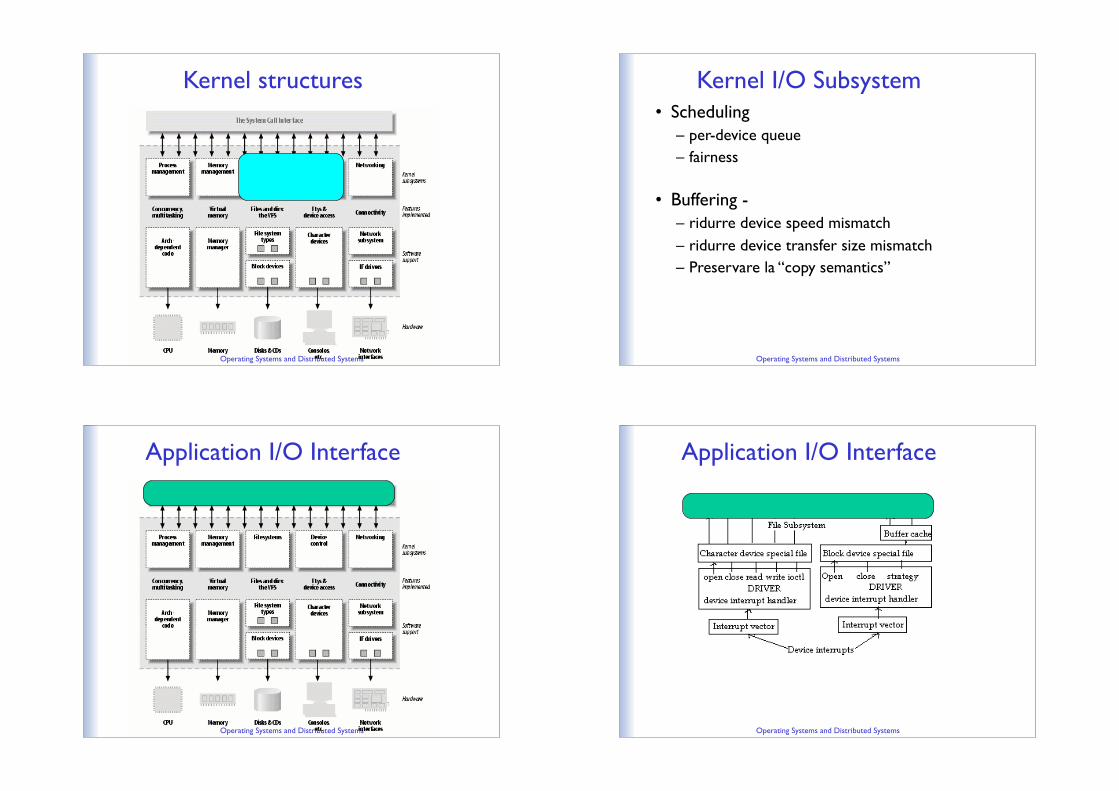
Kernel structures
Operating Systems and Distributed Systems
Kernel I/O Subsystem• Scheduling
– per-device queue
– fairness
• Buffering -– ridurre device speed mismatch
– ridurre device transfer size mismatch
– Preservare la “copy semantics”
Operating Systems and Distributed Systems
Application I/O Interface
Operating Systems and Distributed Systems
Application I/O Interface

Operating Systems and Distributed Systems
Esempio: controllo del Terminale
Operating Systems and Distributed Systems
• Unix: funzione ``ioctl'' per cambiare il terminal driver behaviour.
– Input speed
– Output speed
– Echo or non-echo
– Mode - raw, cooked, rare
int ioctl(int fd, u_long request, char *arg)
open file descriptor request code number pointer to data
Esempio: controllo del Terminale
#define LINE_MAX 128
int main(void)
{
struct sgttyb tty_params;
short flags;
char buff[LINE_MAX];!
! /* get terminal parameters */
ioctl(0, TIOCGETP, &tty_params);!
/* save echo and other state */
flags = tty_params.sg_flags;!
/* turn off echoing */
tty_params.sg_flags &= ~ECHO;
ioctl(0, TIOCSETP, &tty_params);!
printf("Enter password\n");
! fgets(buff, LINE_MAX, stdin);
printf("Secret password was %s\n", buff);!
/* restore previous state */
tty_params.sg_flags = flags;
ioctl(0, TIOCSETP, &tty_params);!
exit(0);
}
Operating Systems and Distributed Systems
• Controla l’echoing dei caratteri.
Esempio: controllo del Terminale


















