
Diseño de Un Motor Wankel
48
UNIVERSIDAD DE CONCEPCIÓN Profesor Patrocinante: FACULTAD DE INGENIERÍA Felipe Vásquez Stuardo DEPARTAMENTO DE INGENIERÍA MECÁNICA DISEÑO DE UN MOTOR WANKEL Fidel Adolfo Santelices Laucirica PROYECTO DE INGENIERÍA MECÁNICA Julio - 2014
-
Upload
fidel-santelices-laucirica -
Category
Documents
-
view
60 -
download
6
description
Proyecto de Ingeniería Mecánica, Fidel Santelices Laucirica. Universidad de Concepción
Transcript of Diseño de Un Motor Wankel

UNIVERSIDAD DE CONCEPCIÓN Profesor Patrocinante:
FACULTAD DE INGENIERÍA Felipe Vásquez Stuardo
DEPARTAMENTO DE INGENIERÍA MECÁNICA
DISEÑO DE UN MOTOR WANKEL
Fidel Adolfo Santelices Laucirica
PROYECTO DE INGENIERÍA MECÁNICA
Julio - 2014

i
RESUMEN
El presente proyecto tiene como finalidad hacer una investigación bibliográfica de los parámetros
críticos de diseño de un motor Wankel, para luego aplicarlos en algunos elementos estructurales y
llegar a un diseño para una configuración elegida. Para esto se necesitara imponer parámetros de
diseño, que de acuerdo a la teoría que se presentará, se obtendran datos válidos requeridos para la
etapa de diseño.
Inicialmente se explicará el funcionamiento del motor Wankel, para en los capítulos siguientes poder
obtener valores geométricos que aporten en el diseño de los elementos principales del motor.
Además se presentara a grandes rasgos las desventajas del motor Wankel, las que han influido en
hacer que el motor se encuentre fuera de producción en la actualidad. También se presentan las
principales ventajas y posibilidades de estudio que permitirían hacer mejoras considerables al motor,
generando la posibilidad de volver a producirlo.
En una última etapa se hará un diseño utilizando el programa Autodesk Inventor, considerando los
cálculos realizados en los capítulos previos.
Finalmente se presentan los planos del conjunto del motor y el despiece respectivo, considerando los
obstáculos que se van superando durante la etapa de diseño, la cual es retroalimentada
constantemente debido a la interrelación de cada pieza del motor. Además se mencionan los estudios
posteriores que se deberían hacer al diseño del motor para llegar a una unidad funcional y lista para
la fabricación.

ii
INDICE DE CONTENIDO
RESUMEN............................................................................................................................................ I
NOMENCLATURA ......................................................................................................................... IV
CAPITULO 1 ....................................................................................................................................... 1
INTRODUCCIÓN ............................................................................................................................... 1
1.1 INTRODUCCIÓN .............................................................................................................................. 1
1.2 OBJETIVOS ..................................................................................................................................... 2
1.2.1 Objetivo general .................................................................................................................... 2
1.2.2 Objetivos específicos ............................................................................................................. 2
CAPITULO 2 ....................................................................................................................................... 3
TEORÍA ................................................................................................................................................ 3
2.1 FUNCIONAMIENTO DEL MOTOR WANKEL ...................................................................................... 3
2.1.1 Componentes ......................................................................................................................... 3
2.1.2 Ciclo del motor Wankel ......................................................................................................... 4
CAPITULO 3 ....................................................................................................................................... 6
VENTAJAS Y DESVENTAJAS DEL MOTOR WANKEL ............................................................ 6
3.1 VENTAJAS DEL MOTOR WANKEL ................................................................................................... 6
3.2 DESVENTAJAS DEL MOTOR WANKEL ............................................................................................. 6
3.3 FUTURO DEL MOTOR WANKEL ...................................................................................................... 7
CAPITULO 4 ....................................................................................................................................... 8
GEOMETRÍA Y PARÁMETROS INICIALES ............................................................................... 8
4.1 PARÁMETROS Y ECUACIONES ........................................................................................................ 8
4.2 GEOMETRÍA DE LA CARCASA ....................................................................................................... 11
4.3 GEOMETRÍA DEL ROTOR .............................................................................................................. 12
CAPITULO 5 ..................................................................................................................................... 14
DISEÑO DE ELEMENTOS ............................................................................................................. 14
5.1 DIMENSIONAMIENTO DEL MOTOR ................................................................................................ 14
5.2 DISEÑO DE LA CARCASA DEL MOTOR ........................................................................................... 15
5.2 DISEÑO DEL ROTOR Y SUS COMPONENTES ................................................................................... 17
5.2.1 Diseño del rotor ................................................................................................................... 17
5.2.2 Geometría de los sellos de vértice del rotor ........................................................................ 18
5.3 DISEÑO DEL EJE EXCÉNTRICO ...................................................................................................... 21
5.4 DISEÑO DE LAS TAPAS LATERALES .............................................................................................. 27
5.5 DISEÑO DE LOS ENGRANAJES ....................................................................................................... 30
CAPITULO 6 ..................................................................................................................................... 32
CONCLUSIONES Y PERSPECTIVAS .......................................................................................... 32

iii
6.1 Conclusiones ........................................................................................................................... 32
6.2 Perspectivas ............................................................................................................................ 32
CAPITULO 7 ..................................................................................................................................... 33
REFERENCIAS ................................................................................................................................. 33
CAPITULO 8 ..................................................................................................................................... 34
BIBLIOGRAFIAS ............................................................................................................................. 34
ANEXO ............................................................................................................................................... 35
A-1 CÓDIGOS EES. ............................................................................................................................ 35
A-2 CÓDIGO MATLAB ....................................................................................................................... 36
A-3 PLANOS MECÁNICOS .................................................................................................................. 37
A-3.1 Conjunto.............................................................................................................................. 37
A-3.2 Carcasa (SAE 4340) ........................................................................................................... 38
A-3.3 Tapa lateral (SAE 4340) .................................................................................................... 39
A-3.4 Bases de soporte (SAE 4340) ............................................................................................. 40
A-3.5 Eje excéntrico (SAE 4340) ................................................................................................. 41
A-3.6 Engranajes (SAE 4340) ..................................................................................................... 42
A-3.7 Pistón Rotatorio (SAE 4340) ............................................................................................. 43

iv
NOMENCLATURA
:Área máxima
:Área mínima.
: Diámetro mínimo del Epitrocoide
: Diámetro máximo del Epitrocoide.
: Diámetro primitivo del engranaje fijo.
: Diámetro primitivo del engranaje móvil.
e: Excentricidad del Epitrocoide.
m: Módulo de los engranajes usados.
: Masa total excéntrica al eje de rotación del cigüeñal.
MEP: Presión Media Efectiva, siglas en ingles
N: Velocidad angular del motor, en revoluciones por minuto.
P: Potencia.
PME: Presión Media Efectiva
R: Radio Generatriz.
: Razón de Compresión.
: Volumen desplazado.
: Ancho de la cámara de combustión..
Z: Constante del Epitrocoide.
: Número de dientes para el engranaje i.
θ: Ángulo de la superficie redondeada de la cara del pistón.
ω: Velocidad angular de rotación del motor en radianes por segundo.

1
CAPITULO 1
Introducción
1.1 Introducción
En los motores de combustión interna por explosión se cuentan con muchas alternativas de
generación de potencia mediante diferentes configuraciones. Estas pueden clasificarse por el tipo de
combustible, por el modo de hacer la ignición, por los cuerpos internos que componen al motor, por
su geometría, entre otras formas de clasificación. La configuración más utilizada es sin duda la del
clásico motor de cilindro y pistón de 4 tiempos desarrollado por Nikolaus Otto, motor que tiene
masivo uso en el mercado automotriz y ha aportado significativamente al desarrollo de la industria y
la sociedad debido al impacto que tiene el automóvil en la actualidad. El hecho de que este tipo de
motor sea tan masivo ha desencadenado vastos estudios y posibilidades de mejora durante todos los
años de la industria automotriz lo que se ha reflejado en un sinnúmero de posibilidades de
optimización de estos tipos de motores de 4 tiempos. Muchas de estas mejoras o soluciones han sido
aceptadas y desarrolladas como también hay otras que han sido desechadas o dejadas de lado. Para el
caso del motor Wankel este nace como una aproximación diferente al ciclo Otto y fue desarrollada
por Félix Wankel en el año 1924. La gran diferencia de este motor está en la concepción de su
geometría para generar la rotación, pues consta con un pistón de geometría triangular que gira
excéntrico alrededor de una carcasa fija transmitiendo movimiento a un eje que rota fijo a las paredes
de la carcasa. El motor Wankel ha sido utilizado en vehículos y motos de producción en masa debido
a sus ventajas por sobre el motor compuesto por cilindros y pistones, pero sus desventajas en cuanto
a la dificultad de fabricarlo, sumado a su alto consumo especifico entre otras falencias particulares
han hecho que el motor se deje de utilizar en vehículos de producción masiva. Sin embargo los
recientes desarrollos de nuevas tecnologías para motores de 4 tiempos convencionales hacen pensar
que podrían aplicarse a un motor Wankel, y junto a estas nuevas tecnologías podría estar la solución
a algunos problemas que hicieron que este motor no continuara fabricándose.
Es por estos argumentos y por la falta de información documentada para el diseño de este tipo de
motor que nace la necesidad de hacer un primer acercamiento dentro de la universidad para
desarrollar un diseño de un motor Wankel y de esta manera dejar una base que permita la
fabricación, desarrollo e investigación de estos motores en el futuro.
Para lograr esta meta en primer lugar se debe hacer una investigación para encontrar las bases del
diseño de un motor Wankel, partiendo por su funcionamiento y sus variables mas criticas, como lo
son la geometría de la carcasa y del pistón, las relaciones de potencia para cierta cilindrada, los
materiales de los sellos internos que se utilizaran, entre otros factores. En una segunda etapa se
pretende hacer un cálculo de los elementos estructurales del motor, limitándose a los más
importantes como el eje cigüeñal, los descansos en los que se monta, entre otros elementos, para en
una tercera etapa llegar a tener los planos de fabricación del motor y de esta manera cumplir con el
objetivo señalado de tener un diseño basal para este tipo de motores.

2
1.2 Objetivos
1.2.1 Objetivo general
El objetivo de este proyecto de ingeniería mecánica es recopilar y realizar los parámetros básicos de
diseño de un motor Wankel para dejar una base a utilizar en estudios posteriores.
Para lograr este objetivo se hará un estudio bibliográfico en distintas publicaciones científicas y en
libros donde se toque el tema del motor Wankel, sumado a aplicaciones de diseño mecánico y
calculo de elementos de máquinas.
1.2.2 Objetivos específicos
- Estudiar y definir los componentes y funcionamiento de un motor Wankel.
- Analizar ventajas y desventajas del motor Wankel.
- Estudiar y definir los parámetros geométricos críticos en el diseño del motor Wankel.
- Dimensionar el motor para los parámetros requeridos.
- Calcular el eje cigüeñal y otros parámetros importantes que se relacionen con este.
- Hacer los planos mecánicos de los elementos del motor.

3
CAPITULO 2
Teoría
2.1 Funcionamiento del motor Wankel
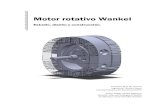
2.1.1 Componentes El motor Wankel a grandes rasgos, dejando de lado los pernos, seguros, retenes y accesorios
adicionales, se compone por una carcasa con una geometría epitrocoidal que sirve de guía, un pistón
rotatorio triangular, y el cigüeñal al que se le transmite la rotación. La transmisión de la fuerza que
hace el torque para que el cigüeñal rote se hace mediante el contacto directo del piston rotatorio con
el eje excéntrico. A continuación en la figura 1 se puede apreciar un corte de un motor Wankel. En el
interior del motor se puede ver el pistón rotatorio triangular, en el centro del pistón se ve un corte del
eje cigüeñal, cubriendo el pistón y actuando como cilindro, se puede apreciar la carcasa con la
geometría epitrocoidal con sus respectivos ductos de lubricante y perforaciones para bujías y
sensores, o ingreso y salida de la mezcla de aire y combustible.
Figura 1. Motor Wankel en corte

4
Cabe destacar que hay motores Wankel de más de un cilindro rotatorio, que se acoplan de manera
modular en el mismo plano de la figura 1 y cada va pistón asociado al mismo eje cigüeñal. Sin
embargo para este proyecto se analizara un motor con solo un pistón de tal manera de simplificar los
cálculos y la sincronización del cigüeñal.
En la figura 1 también se muestra en los 3 vértices del pistón los sellos que separan cada etapa del
ciclo Otto. Entre dos de esos sellos es que se va arrastrando la mezcla de aire y combustible con la
rotación para ir desde la admisión de la mezcla hasta el escape de los gases de la combustión. En la
figura 2 se puede apreciar en más detalle cómo actúan estos sellos, haciendo contacto con la
superficie de la carcasa.
Figura 2, sello de vértice de pistón
2.1.2 Ciclo del motor Wankel
El Motor Wankel como ya se ha mencionado funciona con un ciclo de 4 tiempos al igual que el
motor convencional de cilindro y pistón de Otto. Esto significa que cumple con cada uno de los
tiempos de admisión, de compresión, de expansión y de escape, sin embargo a diferencia del motor
convencional esto se logra en el motor Wankel con el arrastre de la mezcla entre cada cara del pistón
y la carcasa, es decir por una vuelta completa del pistón se cumplen 3 ciclos completos.
A continuación en la figura 2 se puede apreciar esquemáticamente el ciclo de 4 tiempos y además el
momento en el que se transmite la fuerza producto de la ignición.

5
Figura 3, ciclo Otto en un motor Wankel
En la figura 3 (a) se puede ver como ingresa la mezcla de aire y combustible a la cámara de
combustión formada en el volumen entre una cara del pistón rotatorio triangular (cara ortogonal al
plano del dibujo) y la carcasa epitrocoidal, esta mezcla no puede interactuar con las mezclas
adyacentes debido a los sellos que están en cada vértice del pistón. En la figura 3 (b) se puede ver la
rotación del pistón y el comienzo de la compresión de la mezcla. En la etapa siguiente representada
en la figura 3(c) se aprecia el momento de la explosión y comienzo de la expansión de la mezcla aire
combustible, la fuerza que se transmite al pistón se muestra en la figura 3 (d) esquemáticamente
apuntando hacia el eje de rotación del pistón. Finalmente en la figura 3 (e) se puede ver como los
gases producidos por la combustión escapan de la cámara para con la rotación comenzar otro ciclo.
Simultáneamente las dos caras restantes del pistón están en otra etapa del ciclo de 4 tiempos por lo
que se puede comprender mejor lo ya mencionado, que cada vuelta del pistón genera 3 ciclos
completos, además por cada vuelta del pistón el cigüeñal gira 3 veces, es decir por cada giro del eje
hay una ignición y no una cada dos giros como en el motor de cilindro y pistón convencional.
[Kenneth C. Weston (1992)]

6
CAPITULO 3
Ventajas y Desventajas del motor Wankel
3.1 Ventajas del motor Wankel
El motor Wankel al concebirse de una geometría totalmente distinta del motor alternativo de cilindro
y pistón no carga con sus falencias y complejidad, lo que es su primera gran ventaja frente al motor
convencional. El hecho de tener un número de piezas muy inferior lo hace mucho más práctico ya
sea para montaje y desmontaje o para reparaciones y mantenciones posteriores. El motor de cilindros
y pistones se compone por bloques y cada uno de ellos tiene muchas piezas en su composición,
estos bloques o piezas son un cárter, un block y una culata. En el caso del motor Wankel solo se
cuenta con la carcasa, el pistón rotatorio y sus ejes, cada una de estas piezas también tiene un nivel
de complejidad pero en comparación al motor convencional se tiene un número menor de piezas, lo
que sin duda es una ventaja. Por otro lado en una revolución completa de un motor Wankel el pistón
rotatorio recibe 3 igniciones y cada vuelta del pistón hace que el cigüeñal gire 3 veces, esto se
traduce a menos vibraciones y una menor velocidad de los elementos rodantes en relación al motor
convencional, considerando ambos motores de cilindrada equivalente y generando la misma
potencia.
Además el motor Wankel con menos cilindrada genera potencias superiores al motor convencional
por lo que sus dimensiones son muchos menores en igualdad de potencia y eso culmina en motores
más pequeños y con menos peso. En definitiva el motor Wankel puede dar una solución a muchas
problemáticas que puede generar un motor convencional y obteniendo de todas maneras resultados
similares.
3.2 Desventajas del motor Wankel
A pesar de las ventajas que otorga este tipo de motor finalmente fueron sus desventajas las que
hicieron que se deje de producir en masa, pues a pesar de ser de un diseño simple, la geometría de la
carcasa (Epitrocoide) tiene muy pocas opción de ser variada [K.C. Jiang et al. 2004] y además es
muy difícil de fabricar a la perfección, por lo que se necesitan equipos especiales o de control
numérico para obtener resultados más precisos. Por otro lado el motor Wankel es considerado un
motor de 4 tiempos con todas las etapas de este ciclo, y lo que separa cada etapa es un sello que hay
en cada vértice del pistón triangular. Debido a la alta diferencia de presiones que hay entre cada
etapa este sello debe tener tolerancias muy acotadas, lo que hace que haya una baja durabilidad de la
superficie del pistón rotatorio y los elementos sellantes. Finalmente la desventaja con la que más
tuvieron que interactuar los propietarios de automóviles con motores Wankel (los pocos que salieron
a la luz) fue el alto consumo específico de combustible, lo que sumado a su ya mencionado alto
número de mantenciones, terminaron por hacer que el motor Wankel no tuviera la misma aceptación
que el motor convencional de cilindros y pistones y se terminara su producción en masa.

7
3.3 Futuro del motor Wankel
Con los avances que se han ido implementando en el área automotriz para los motores de cilindro y
pistón nace la interrogante sobre si es posible hacer alguna mejora a las desventajas que posee el
motor Wankel. En base a esto y considerando la problemática del alto consumo específico de
combustible se han estado haciendo investigaciones sobre la real posibilidad de diseñar un motor
Wankel con ignición por compresión como en los motores de ciclo diesel de cilindro y pistón.
Respecto a esto para tener una mezcla adecuada de aire y combustible, parámetro esencial para la
ignición por compresión, se debe contar con una geometría de la cámara de combustión que facilite
esta mezcla. Sin embargo en el motor Wankel es imposible variar la geometría de la cámara, pues es
su parámetro básico de funcionamiento. Además disminuir la razón entre el volumen y el área
superficial de la cámara incrementa la perdida de calor hacia el sistema de refrigeración, lo que se
traduce a una baja en la eficiencia térmica y total del motor Wankel. Es por esto que el consumo
específico de estos motores es bajo en comparación a un motor convencional de cilindrada similar,
ya que como se mencionó no es posible variar la geometría del Epitrocoide. [Antoni Iskra et al.
2007].
Para hacer variaciones en la geometría de la cámara de combustión solo se podrían hacer rebajes en
el pistón rotatorio, lo que mejoraría la calidad de la mezcla de aire y combustible, pero de todas
formas la razón entre el volumen y el área superficial sería baja. Hacer estos rebajes además
aumentaría la razón de compresión a valores incluso admisibles para motores con ignición por
explosión (valores máximos soportados), pero aun no alcanzaría para tener valores que puedan
asegurar la ignición por compresión.
De todas formas con las nuevas tecnologías diesel la razón de compresión necesaria, para que la
mezcla haga ignición ha ido disminuyendo, debido a la incorporación de sistemas de inyección de
alta presión y turbocompresores. Incorporando estos sistemas se evitaría hacer rebajes demasiado
grandes al pistón, o modificar la razón de compresión haciendo el Epitrocoide mas alargado. Lo que
es ventajoso para evitar generar problemas adicionales en los sellos de los vértices del pistón por
ejemplo, y de esta forma se evitaría hacer modificaciones que generen problemas adicionales.
En definitiva la solución más viable con este punto es analizar la instalación de turbocompresores y
sistemas de inyección de alta presión que van desarrollándose y ampliando sus presiones a pasos
agigantados, así la geometría basal del motor Wankel seguiría intacta y podría abrirse cada vez más
la posibilidad de hacer mejoras sustanciales a los problemas que posee este tipo de motor.

8
CAPITULO 4
Geometría y parámetros iniciales
4.1 Parámetros y ecuaciones
Como ya se ha mencionado, un parámetro fundamental en el diseño y funcionamiento de un motor
Wankel es la geometría de sus componentes, y uno de los componentes más importantes es la
carcasa del motor. Esta carcasa se compone por dos planos paralelos separados por una geometría
epitrocoidal. La ecuación paramétrica que define al Epitrocoide se presenta a continuación como la
ecuación 1[Kenneth C. Weston, 1992]
(1 (a))
(1 (b))
Donde e corresponde a la excentricidad, es decir la distancia desde el centro de rotación fijo del
cigueñal hasta el centro del rotor, R es la distancia del centro del rotor a un vértice de el mismo,
también llamado radio generatriz y α es el ángulo para el que se consideran los parámetros, variando
α entre 0º y 360º. Los valores de e y R tanto como los resultados de la posición pueden ser utilizados
en metros o pies. En la figura4 se muestran esquemáticamente los parámetros e, R y α.
Figura 4, nomenclatura de la geometría de la carcasa

9
También es útil para algún control posterior del motor saber dónde se encuentra cada vértice del
pistón rotatorio triangular. Para esto se utiliza la ecuación 2 que también es una ecuación
paramétrica. El valor de puede ser 0,1 o 2 y corresponde al vértice del triángulo que se quiere saber
su posición, de todas maneras también es posible hacer la diferenciación simplemente sabiendo que
están separados por 120º entre sí.
(2 (a))
(2 (b))
El volumen desplazado (en o ) por cada cara del rotor triangular se puede obtener mediante
la ecuación 3 que se presenta a continuación, donde corresponde al ancho que tendría la cámara de
combustión epitrocoidal, esta ecuación también puede ser usada tanto en metros como en pies.
(3)
Esta ecuación se presenta sin una simplificación para debido a que la relación entre y es usada
para obtener otros datos, como la razón de compresión por ejemplo, lo que permite tener este valor
de manera más cómoda y a mano.
Considerando que la cara del pistón rotatorio triangular que encierra la mezcla de aire y combustible
con la carcasa es plana, la razón de compresión se puede obtener mediante la ecuación 4.
(4)
Sin embargo en la realidad el pistón no tiene sus caras rectas, sino que son convexas, esto se hace
para obtener mayores valores en la razón de compresión, y la relación para obtener este valor se
presenta en la ecuación 5.
(5)

10
En la figura 5 se muestran esquemáticamente los parámetros utilizados para obtener el segmento de
volumen añadido ( ), y cuya fórmula resultante se presenta en la ecuación 6.
Figura 5, parámetros de cara bordeada convexa en pistón
(6)
El ángulo se relaciona con el radio de curvatura que se le da a la cara del pistón, mediante la
relación presentada en la ecuación 7. La idea es hacer que la curvatura que se adiciona toque la
carcasa cuando se tiene el volumen mínimo como se presenta en la figura 5.
(7)
Otro parámetro fundamental que se utiliza como punto de partida al momento de diseñar un motor,
es la relación que nos indica qué potencia se obtiene con las variables del motor. En la ecuación 8 se
muestra la fórmula que relaciona la potencia con el volumen desplazado por cada revolución, la

11
presión media efectiva (MEP) que puede lograr el tipo de motor que se esté analizando y las
revoluciones por minuto a las que se está operando (N). Se considera el volumen desplazado por una
cara del rotor, debido a que en un giro una sola cara hace un ciclo termodinámico completo.
(8)
4.2 Geometría de la carcasa
Como ya se ha mencionado la carcasa del motor Wankel tiene una forma epitrocoidal y la geometría
de esta está asociada a la ecuación 1 (a) y 1(b). Al momento de analizar qué se obtiene si se ingresan
datos a la ecuación 1 se puede observar que toma interés la relación entre y , la cual se denomina
como la constante del Epitrocoide y se define en la ecuación 9.
(9)
Mientras más grande sea este valor se obtendrán geometrías epitrocoidales mas alargadas y rotores
más grandes, esto se traduce a tener valores más altos para la razón de compresión. Para motores con
ignición por explosión la razón de compresión máxima necesaria es de 11, y con los avances que se
desarrollan cada año este valor va a la baja.[Antoni Iskra et al. 2007].
La razón de compresión expresada en función de la constante del Epitrocoide se define en la
ecuación 10.
(10)
El valor de Z varía entre 6 y 8 [Kenichi Yamamoto 1971]. Para verificar la diferencia que puede
aportar a la geometría de la carcasa se graficara en matlab 3 configuraciones geométricas distintas.
Se ha dejado constante el largo de la cámara para todos los casos y simplemente se ha hecho variar e
y r en función del valor de Z elegido.
En la figura 6 se muestra en color azul el Epitrocoide formado con un valor de Z=1, en este caso no
es posible utilizar esta configuración porque se extiende hasta dentro de la cámara y solo se requiere

12
-30 -20 -10 0 10 20 30-25
-20
-15
-10
-5
0
5
10
15
20
25
su contorno. En color verde se muestra un Epitrocoide con Z=10, para ese caso se tiene una
superficie recta en los lados de la cámara, en donde se perdería compresión cuando el pistón rotatorio
este comprimiendo la mezcla. En color rojo se muestra un Epitrocoide con Z=6, para esta
configuración se tiene una geometría a las conocidas para el Epitrocoide del motor Wankel, y
además se está dentro de los valores recomendados para Z
Figura 6, Epitrocoides para distintos valores de Z
De todas formas para obtener un valor más real para el diseño es necesario tener más datos,
sobretodo en la sección del cigüeñal que hace de centro en el pistón rotatorio, sin embargo este
análisis permite comenzar a acotar la razón Z para así tener una geometría armónica una vez definido
por lo menos uno de los parámetros de e o R.
4.3 Geometría del Rotor
Como ya se ha mencionado la geometría básica del rotor es un triángulo que se circunscribe en la
carcasa epitrocoidal. Para comenzar a diseñar este pistón rotatorio se debe en primer lugar considerar
un triangulo con sus aristas rectas y no convexas. Luego se debe disponer de un triangulo con una
geometría que quede circunscrita en la carcasa, para esto se debe estar posicionado en el eje de
simetría del Epitrocoide por donde está el menor diámetro de la carcasa y además en un punto de
intersección con la misma. En esta intersección se sitúa un vértice del triángulo para luego hacer
líneas rectas que estén cada 60º y además se intercepten con la carcasa. La unión de estos 3 puntos
donde se toca la carcasa es el triángulo del pistón rotatorio.

13
Luego para obtener los lados convexos se debe hacer una curvatura que cumpla las siguientes
restricciones. En primer lugar debe pasar por los vértices del triangulo y debe proyectarse de tal
manera que toque la carcasa cuando se está en la etapa de compresión, es decir cuando el volumen es
mínimo, tal como se aprecia en la figura 5. Esa distancia puede ser medida desde el centro del
Epitrocoide para luego saber hasta qué punto se debe llegar con la cara convexa, esta distancia es el
menor radio del Epitrocoide.
En la ecuación 11 y 12 se presentan los valores para el máximo y mínimo diámetro del Epitrocoide
respectivamente.
(11)
(12)
Considerando lo anterior y lo presentado en la figura 6, la altura h que se debería agregar
corresponde a lo siguiente:
(13)

14
CAPITULO 5
Diseño de elementos
5.1 Dimensionamiento del motor
La elaboración de cualquier elemento requiere retroalimentaciones y mejoras durante el proceso de
diseño. En algunas ocasiones es necesario imponer ciertos valores para después comprobarlos con
teorías conocidas. Para el diseño de este motor se utilizaran recomendaciones propuestas en
publicaciones científicas y bibliografías revisadas, en conjunto con la utilización de programas
informáticos aplicados a la ingeniería.
El diseño de este motor comenzará con el cálculo del volumen desplazado y para ello se requiere
imponer la potencia que este otorgará. Luego con la ecuación 8, para una cantidad de Revoluciones
fija y considerando que un motor Wankel tiene una presión media efectiva de [José
Marroquín, et al (2009)] es posible obtener valores de volumen desplazado. Una vez definido el
ancho del motor y considerando las ecuaciones 3 y 9 se pueden comenzar a obtener todas las
geometrías dispuestas ya con valores reales al no haber parámetros sin resolver.
Se ha fijado una potencia de 50 a desarrollar por el motor. Los valores necesarios para despejar
el volumen desplazado se presentan en la tabla 1, con los respectivos cambios de unidades para
cumplir con las dimensiones del sistema internacional.
Tabla 1, Parámetros usados para buscar volumen desplazado.
Potencia ( ) 37,29 Presión media efectiva ( ) 4,82 Velocidad de Rotación ( ) 6000
De la ecuación 8 se tiene que 7,73 . Luego considerando un valor de Z=6
(puede variar de 6 a 8) [Kenichi Yamamoto 1971] y un ancho de la cámara de combustión de 8 cm
(arbitrario), es posible determinar la excentricidad e y el radio generatriz R del Epitrocoide usando
las ecuaciones 3 y 9.
Los valores obtenidos se presentan en la tabla 2.
Tabla2, Excentricidad y radio generatriz del Epitrocoide.
e R

15
5.2 Diseño de la carcasa del motor
Para el diseño de la carcasa que forma el contorno de la cámara de combustión se utiliza la geometría
de un Epitrocoide de dos lóbulos como se mencionó en los capítulos previos, con un
y un . Usando las ecuaciones 11 y 12 se tienen un y
.
Para conocer es el espesor mínimo que debe tener la carcasa se debe comparar la resistencia del
material con la presión que ejercen los gases de combustión en ella. Para esto se ha realizado un
cálculo de equilibrio estático en la carcasa, la fuerza ejercida por la presión es contrarrestada por la
resistencia del material en la zona elástica, el equilibrio se presenta en la ecuación siguiente y en la
figura 7.
= 0
(14)
Figura 7, esquema de presión actuando en la carcasa.
Para el valor de se considera , corresponde al área estimada donde actúa la
presión de los gases de combustión, L corresponde al perímetro de la misma área y t es el espesor
buscado.

16
Para determinar el área de la carcasa se dibujo esta en inventor dándose un espesor arbitrario (el cual
no afecta en el área interna de carcasa), luego usando las herramientas de medición de inventor se
determinó que y . Además se consideró como material un
aluminio con un límite elástico de .
De la ecuación 14 se obtiene que el espesor mínimo debe ser de , sin embargo el aluminio
debe ser recubierto por una aleación de mayor dureza en la zona interna de la carcasa. Debido a esto
es posible usar simplemente una aleación de acero de alta resistencia, lo que disminuiría aun más el
espesor mínimo de la carcasa. De todas maneras la carcasa debe tener un espesor tal que admita los
hilos de los pernos de fijación de las tapas y un sistema de refrigeración. Para diseñarla se ha
extendido por sobre el Epitrocoide dos semi circunferencias que se unen por tramos rectos, en la
zona más angosta se tiene un espesor de 39 mm, lo que nos da un factor de seguridad en esa zona de
278,5 para el aluminio.
Figura 8, Boceto de carcasa antes de extruir.
En la figura 8 se presenta el boceto de la carcasa, se aprecia la geometría del Epitrocoide que
encerrará la cámara de combustión y el exterior con dos circunferencias de 130 mm de radio, 90 cm
de separación entre centros y unidas por trazos rectos tangentes entre ambas circunferencias.
Es pertinente señalar que las tapas que cerrarán la cámara de combustión y protegerán a los
componentes internos del motor son dos placas de la misma geometría exterior de la carcasa, con un
espesor que sea favorable para alojar a los componentes de sujeción del eje excéntrico.

17
5.2 Diseño del rotor y sus componentes
5.2.1 Diseño del rotor
El rotor triangular debe diseñarse principalmente para cumplir con las restricciones geométricas de la
carcasa y el eje excéntrico (cigüeñal).Su geometría parte con un triángulo restringido en el
Epitrocoide, que toca con cada uno de sus vértices la carcasa. Para conocer el valor de la altura que
se debe agregar para generar la superficie curva se utiliza la ecuación 13, lo que nos deja como
resultado . Luego se unen los vértices del triángulo con esta altura adicional. Para
hacer esta unión hay dos formas. La primera es ajustar una curva que pase por esos 3 puntos con la
herramienta que genera una curva que pasa por 3 puntos en Autodesk Inventor. Otra forma es crear
una elipse que tenga como eje mayor un eje paralelo al diámetro mayor del Epitrocoide y un eje
menor paralelo al eje menor del Epitrocoide, al forzar que esta geometría se inicie en el punto donde
termina la altura h es posible hacer que un tramo de curva de la elipse pase por todos los puntos que
son necesarios. Repitiendo lo anterior para las 2 caras restantes nos dará como resultado el triangulo
con sus caras convexas. El bosquejo del rotor se presenta en la figura 9.
Figura 9, Bosquejo del Rotor.
El diámetro de la perforación depende del diámetro de la excéntrica del cigüeñal, y el espesor que
tendrá el rotor es igual al espesor total de la cámara de combustión. Además se debe hacer una
perforación con una profundidad igual al espesor de los dientes de los engranajes que sincronizaran
la rotación del pistón, y con un diámetro mayor que el diámetro primitivo del engranaje interior que
se alojara en ese espacio.

18
Finalmente es importante dejar un espacio para los sellos en los vértices del pistón, estos sellos son
de una aleación especial con buena resistencia mecánica, al igual que los sellos que actúan entre las
caras laterales del rotor. Al hacer las ranuras para alojar los sellos en los vértices queda una
separación entre el pistón y la carcasa, que se suplida con el sello mismo, por lo tanto el rotor no toca
la carcasa con sus vértices.
El engranaje interior puede ser unido al pistón por un ajuste que asegure que quede solidario a él. En
la figura 10 se muestra el pistón ya extruido y con la geometría correcta.
Figura 10, Modelo 3d del pistón Rotatorio.
5.2.2 Geometría de los sellos de vértice del rotor
El sello del vértice del rotor debe estar siempre en contacto con la carcasa epitrocoidal para asegurar
que no se mezclen las etapas adyacentes y previas a él. La geometría más usada es una terminación
circunferencial en el perfil del sello, que se acomode en los distintos grados de inclinación que habrá
entre él mismo y la carcasa.
La geometría del sello se presenta en la figura 11, con sus cotas características.

19
Figura 11, cotas características del sello de vértice.
El valor de L y h están relacionados con la elección del ancho mismo del rotor, que a su vez depende
del ancho de la cámara de combustión, y de la profundidad que se admita para el surco en el rotor.
En la ecuación 15 se presenta una relación entre b y a con los parámetros geométricos que definen el
Epitrocoide.
(15)
También es válido hacer un análisis del esfuerzo de aplastamiento en el área que se apoyará en el
rotor, pero para esto es necesario tener más datos de las presiones de la etapa previa y adyacente que
separará el sello. En la figura 12 se presenta un esquema con las fuerzas involucradas en el contacto
del sello.

20
Figura 12, Esquema de fuerzas actuantes en sello
La fuerza radial se puede descomponer como y la fuerza tangencial se puede
descomponer como . Donde las fuerzas descritas se presentan a continuación.
- : Fuerza resultante aplicada al sello en dirección radial
- : Fuerza de inercia aplicada al sello en dirección radial
- : Fuerza aplicada por la presión de los gases en dirección radial
- : Fuerza ejercida por el resorte en dirección radial
- : Fuerza de inercia aplicada en dirección perpendicular
- : Fuerza aplicada por la presión de los gases en la cara del sello
Las ecuaciones de y se presentan en la ecuación 16 y 17 respectivamente, con P1 y P2 como
las presiones de las etapas previas y siguiente que separa el sello, y como el ángulo de inclinación
del sello.
(16)
(17)

21
5.3 Diseño del eje excéntrico
Si hacemos una comparación entre el motor convencional de cilindro y pistón, el eje excéntrico
correspondería al cigüeñal de este, debido a esto se le llamara de las dos formas en este informe. Se
conforma por un eje recto y un diámetro mayor excéntrico que será el punto de apoyo y rotación del
pistón triangular del motor. Su geometría está limitada a los valores de los diámetros primitivos de
los engranajes que hacen de guía del rotor, por lo que el diámetro del eje y la excéntrica siempre
serán iguales o menores que los diámetros primitivos mencionados.
El proceso de diseño de este eje es iterativo, siempre es posible que se tenga la necesidad de hacer
alguna modificación que obligue al diseñador a comprobar sus cálculos las veces que sean
necesarias.
Los engranajes guías del rotor tienen los siguientes diámetros primitivos:
-Para el caso del engranaje fijo
-Para el engranaje móvil (engranaje interior solidario al rotor)
La distancia entre el centro de rotación del eje y el centro de la excéntrica es igual al valor de la
excentricidad del motor . Para comenzar con valores posibles del diámetro del eje y
del diámetro de la excéntrica se ha considerado en primer lugar la gama de bujes (para descansos
hidrodinámicos) disponibles. Ya que contamos con medidas acotadas, y que para poder lograr el
diámetro primitivo del engranaje fijo es necesario tener un diámetro menor (que nos permita tener
espacio para un sistema de fijación del engranaje), se ha determinado verificar una geometría con un
diámetro de eje de . Además para hacer que la excéntrica coincida con la superficie del
diámetro del eje, se ha dado un diámetro para la excéntrica de . En la figura 13 se muestra
el boceto del perfil del eje excéntrico con sus dimensiones acotadas.
Figura 13, Bosquejo de eje excéntrico.

22
El largo del eje está restringido a la ubicación de sus puntos de apoyo lo que a su vez depende del
espesor de las tapas del motor, y de los elementos para transmitir potencia o acoplar elementos de
balance. En la figura 14 se presenta un esquema que dimensiona el largo del eje y señala qué punto
importante está en esa zona. El ancho del motor es de pero es en esta zona donde deben
montarse también los engranajes que guían al rotor. Se ha considerado dejar un espesor de dientes de
lo que deja un largo de de la excéntrica. Además se ha considerado que desde el
límite exterior de la carcasa el punto medio del ancho del buje estará situado a (punto de
apoyo del eje). Como última consideración se han dejado adicionales más allá de la tapa
por cada lado del eje, para sacar potencia o acoplar algún elemento que supla el desbalance
producido por la excéntrica.
Figura 14, Esquema del largo del eje.
El siguiente paso es comprobar si el eje cumple con el diámetro mínimo según su configuración. A
modo de aproximación se considerará que el eje tiene su diferencia de diámetros pero no de manera
excéntrica. Luego se analizara si el factor de seguridad resulta en un valor favorable.
Debido a que el eje estará sometido a esfuerzos de flexión y torsión medios y alternos es suficiente
combinar los diferentes tipos de esfuerzos de von Mises alternos y medios. Además se hará el
cálculo inicial con las ecuaciones que se consideran para ejes circulares y simétricos, una corrección
para estudios posteriores deberá utilizar un análisis mediante elementos finitos para simular las
cargas reales que recibirá el eje. Para el análisis a la fatiga la tendencia actual es usar el criterio de
Gerber [Richard Budynas, et al, 2008], cuya ecuación se presenta a continuación.
(18)

23
Donde
(19(a))
(19(b))
Este eje debe ser construido con un material que posea buena resistencia a la fatiga y altas
propiedades mecánicas. Para elementos con estas solicitaciones una aleación muy utilizada es el
Acero SAE 4340, además se ha elegido este acero con un tratamiento térmico para aumentar sus
propiedades mecánicas. En la bibliografía se señala que este acero fue tratado por temperaturas que
bordean los 425 ºC. La refrigeración efectiva de los componentes del motor debe asegurar que no se
alcanzaran esos valores de temperatura en el eje. El estudio de la refrigeración del motor se ha dejado
para estudios posteriores, los que deben considerar estas restricciones. Las propiedades del Acero
elegido se presentan en la tabla 3
Tabla 3, propiedades SAE 4340
Dureza
Esfuerzo Fluencia
Esfuerzo Último
Elongación
[%]
430 1360 1470 10
El límite de resistencia a la fatiga para ciclos se expresa en la ecuación 17.
(20)
Se considerará aproximadamente, para aceros también es posible usar la siguiente
simplificación para el límite de resistencia a la fatiga, representado en la ecuación 18.
(21)
Considerando los valores de la tabla 3, el esfuerzo máximo o que se tiene es y un
límite de resistencia a la fatiga para ciclos .
Para obtener el torque máximo y mínimo se debe considerar la ecuación 22.Esta ecuación entrega el
valor del torque que se aplica en el cigüeñal considerando la variación de la fuerza que producen los
gases de combustión, en función del ángulo de rotación del cigüeñal.

24
(22)
El torque máximo se cumple cuando
y el torque mínimo se cumple cuando
, es decir el torque mínimo es cero.
El eje estará sometido a la fuerza que produce la explosión de manera cíclica, y además a la fuerza de
inercia producto de la rotación de la masa del motor y la excéntrica. Como el centro de masa de estos
dos componentes esta rotando y trasladándose a un radio igual a la excentricidad (respecto del eje de
rotación del diámetro menor del cigüeñal), se tiene una fuerza de inercia que apuntara en dirección
radial y hacia la carcasa.
El valor de la fuerza producida por la explosión se puede obtener ya que es conocida la PMS y la
superficie de la cara del rotor donde se produce la explosión, al igual que la masa del tramo
excéntrico del eje y el rotor mismo, todos estos datos han sido obtenidos de la geometría dibujada en
inventor para el rotor y ese tramo del eje, ayudado de las herramientas de medición del programa y
considerando una densidad del acero de
Tabla 4, datos utilizados para calcular las fuerzas.
Masa tramo excéntrico del eje Masa del rotor Masa Total (excéntrica) Superficie de explosión del rotor
De los datos de la tabla 4, sumado al PMS se puede sacar la fuerza producto de la explosión. De la
masa total excéntrica asociado a la aceleración centrípeta y la velocidad máxima es posible obtener
la fuerza de inercia con la ecuación 20.
(23)
La fuerza de inercia estará siempre actuando mientras el motor cigüeñal rote, pero la fuerza producto
de la explosión de los gases de combustión estará actuando de manera intermitente. Como se
mencionó la inercia actúa en dirección a la carcasa cuando la explosión actúa en dirección al eje, es
por esto que la suma vectorial de ambas será la fuerza mínima, y la fuerza de inercia actuando sin la
explosión será la fuerza máxima (debido a que van en direcciones apuestas). De esta forma se tiene
y
En la tabla 5 se presentan los valores de las fuerzas máximas y mínimas, como también los torques
máximos y mínimos.

25
Tabla 5, Fuerzas y Torques extremos.
Para obtener los valores de los momentos flectores máximos y mínimos se utilizo el acelerador de
diseños de ejes de Autodesk Inventor, la ventaja de esto es que se consideran las fuerzas y masas
distribuidas de la geometría real del eje (sin excentricidad como se menciono previamente). En la
figura 15 se ve la configuración usada, con los puntos de apoyo de las cargas, y la fuerza utilizada.
Figura 15, cargas en eje simuladas en inventor
Los momentos flectores mínimos y máximos se presentan en la figura 16 y 17 respectivamente. Los
valores importantes obtenidos se presentan en la tabla 6.

26
Figura 16, Momento flector mínimo.
Figura 17 Momento flector máximo.
Tabla 6, Momentos flectores y deflexiones en eje.
Deflexión máxima Angulo de deflexión máxima en soportes 0,06º

27
Los valores de los concentradores de esfuerzos se obtienen de tablas presentes en la
bibliografía [Richard Budynas, et al, 2008], con un valor de y . Esto resulta en
los siguientes valores, y . Estos valores son aproximados al tratarse de un
método gráfico.
Para considerar la resistencia del material a la fluencia se utiliza la ecuación 21:
(24)
Una verificación rápida y conservadora se logra haciendo , esto es debido a que el
valor de siempre será mayor o igual que [Richard Budynas, et al, 2008].
Ahora considerando todos los parámetros ya presentados y las ecuaciones 18, 19(a) ,19(b) y 24 se
tienen los siguientes resultados presentados en la tabla 7.
Tabla7, valores de esfuerzos y factores de seguridad
Esfuerzo alterno ( Esfuerzo medio ( Factor de Seguridad en fatiga ( ) 1,965
Factor de Seguridad de fluencia ( ) 1,824
Se puede ver que la geometría dispuesta estaría cumpliendo con los parámetros estructurales
iniciales de diseño, sin embargo como ya fue mencionado, esto es un proceso iterativo, en el cual se
pueden añadir situaciones especiales. Para estudios posteriores convendría hacer un análisis mediante
elementos finitos donde se consideren las inercias de las masas que balancean el motor así como las
condiciones de esfuerzos reales y también algún sistema para la toma de potencia.
5.4 Diseño de las tapas laterales
Las tapas laterales deben cumplir con la función de cerrar la cámara de combustión por ambos lados
de la proyección del Epitrocoide. Además son elementos estructurales que alojan los bujes, que son
los soportes del eje excéntrico del motor.
En la figura 17 se muestra en corte el diseño que se realizo para la tapa del lado donde se encuentra
el engranaje fijo del motor.

28
Figura 18, Corte de tapa del lado con engranajes.
Como se puede además ver en la figura 18, la tapa se compone de 2 piezas, una plancha con
perforaciones y el soporte del engranaje y buje del descanso hidrodinámico. La fijación de ambos
componentes es mediante pernos, el buje entra con un ajusto fijo y el engranaje puede ser fijado
también con un ajuste por interferencia.
En estudios posteriores se deberá analizar los parámetros de la lubricación necesarios para el
funcionamiento del descanso hidrodinámico, para el caso del soporte también deberá diseñarse una
red interna de lubricación que cumpla con los parámetros para cumplir con la formación de la
película lubricante.
El cálculo estructural considera la resistencia de los pernos y del material de la tapa en las
perforaciones.
Para el caso de la tapa se considera el lado menos favorable, es decir el lado que tiene una reacción
mayor en el buje. Luego se debe verificar la resistencia de la configuración usada tanto a la fatiga
como a la fluencia. Se considerará la fuerza en el buje como una fuerza de corte dividida en el
número de perforaciones para cada perno.
De igual manera se debe estudiar la resistencia de los pernos tanto a la fatiga como a la fluencia. Para
la fatiga se utilizara el criterio de Goodman.

29
Para la tapa se tiene un área proyectada en cada perforación de . La fuerza en el buje
con más carga es (mostrado en la figura 19), y se considerara como material el
mismo usado en la carcasa y el eje, un SAE 4340, cuyas propiedades están mostradas en la tabla 3.
Figura 19, Fuerzas resultantes en los descansos
Para el caso de los pernos el análisis es similar, la fuerza se divide en el número de pernos y el área
proyectada para el corte se obtiene de tablas [Richard Budynas, et al, 2008]. Para el caso de un perno
métrico 8 como se eligió en el diseño se tiene un área proyectada de . Además se
considera una resistencia a la ruptura de (SAE 4140).
Los factores de seguridad a la fluencia y a la fatiga para los pernos y para la carcasa de la tapa se
presentan en la tabla 8
Tabla 8. Factores de seguridad en pernos y tapas.
Factor de Seguridad Pernos Tapa
Fatiga 4,97 40,12
Fluencia 2,259 31

30
En la figura 20 se muestra el modelo 3d de la tapa del lado de los engranajes, con sus componentes
ensamblados. Se seleccionaron según los requerimientos geométricos el reten SKF CRW1R y el buje
SKF PCM505560M.
Figura20, modelo 3d de una tapa del motor.
5.5 Diseño de los engranajes
El motor Wankel cuenta con dos engranajes que actúan de guías para el rotor y el eje excéntrico,
estos no transmiten el torque del motor, por lo que su única función es guiar la traslación y rotación
del rotor al interior de la carcasa. Una posible forma de tener un aumento significativo en la carga
que reciben los dientes de los engranajes es por una combustión anormal, o velocidades de rotación
demasiado altas (más que la que genera la potencia máxima del motor). Los efectos de las
condiciones normales de funcionamiento generan unas cargas muy inferiores a las generadas por los
casos poco favorables mencionados [Kenichi Yamamoto 1971].
Como se mencionó en el capítulo 5.3 el diámetro primitivo del engranaje más pequeño y que esta fijo
es . Para el engranaje móvil y que es interior se tiene .
Además la relación de engrane para estos engranajes en todo motor Wankel es de 2:3.
Dado los valores de los diámetros primitivos se elije un módulo para tener un número de
dientes entero. El número de dientes se calcula usando la ecuación 21.

31
(25)
Luego de la ecuación 21 y la relación entre el número de dientes (2:3) se tiene el numero de dientes
para cada engranaje, los cuales se presentan en la tabla 9.
Tabla 9, Número de dientes para cada engranaje.
(Engranaje fijo) 40
(Engranaje móvil interior) 60
Con estos datos ingresados al generador de engranajes de Autodesk Inventor se tiene un modelo 3d
de ambos engranajes. En la figura 21 se ve un ensamble del motor con sin la tapa del lado del
engranaje fijo, para dejar a la vista los engranajes.
Figura 21, ensamble 3d de los componentes del motor
Con los parámetros diseñados se tiene lo necesario para cumplir con los puntos más importantes en
este tipo de motores, sin embargo el diseño de un mecanismo tan complejo require muchos sistemas
auxiliaries para poder estar en funcionamiento, así como también es de suma importancia volver a
calcular constantemente lo ya resuelto ante cualquier modificación que se haga al diseño.

32
CAPITULO 6
Conclusiones y Perspectivas
6.1 Conclusiones
El diseño del motor Wankel requiere especial cuidado en comprender su funcionamiento y la manera
en la sé que transmite la potencia al eje para poder calcular sus componentes. No tener claro esto se
traducirá en la creación de componentes con baja fiabilidad de funcionamiento.
Los parámetros geométricos del motor Wankel son un punto crítico en su diseño. Es importante
notar la relación de la constante del Epitrocoide con la geometría final de la carcasa del motor y el
cambio que esta produce en muchos componentes relacionados.
La forma de funcionamiento del motor Wankel genera la necesidad de un sello óptimo entre cada
etapa del ciclo Otto. Para lograr esto es necesario hacer estudios termodinámicos que entreguen
valores fidedignos de las diferencias de presiones entre cada etapa.
Finalmente cabe destacar que se logro recopilar de distintas fuentes bibliográficas todos los
parámetros iniciales necesarios para poder diseñar un motor Wankel de manera estructural, y con
ello poder obtener un modelo 3d válido y funcional.
6.2 Perspectivas
Es necesario revisar y calcular consecutivamente los parámetros de diseño del motor completo al
modificar algún elemento en particular debido a la relación de muchas variantes del motor. Para esto
es pertinente validar la geometría del motor con algún modelamiento con elementos finitos, lo que
permitiría poder optimizar la geometría concebida en este proyecto.
Queda como tarea posterior diseñar la refrigeración del motor para asegurar su funcionamiento sin
problemas, esto debido a los diferentes materiales que componen toda la estructura, los que son
susceptibles a las diferencias de temperaturas que se producirán tanto por la combustión como por el
roce.
También queda como estudio posterior el diseño de la red de lubricación interna del motor, para
asegurar que el aceite llegue a todos los lugares donde se requiera. Así como también es necesario
lubricar los descansos hidrodinámicos para evitar daños prematuros en los puntos de apoyo del eje
excéntrico.
Finalmente debido a la geometría propia del motor se recomienda un proceso de fabricación
mediante maquinas herramientas de control numérico. Para esto se debe hacer un código afín
considerando la geometría obtenida en este proyecto.

33
CAPITULO 7
REFERENCIAS
Danieli Guido A, Keck Games C, Heywood John B. (1978)
Experimental and Theoretical analysis of Wankel engine performance.
Society of automotive engineers, INC.
Dankwart Eiermann, Roland Nuber, Michael Soimar. (1990)
The introduction of a New Ultra-Lite multipurpose Wankel engine.
SAE Technical paper series.
José Marroquín, Byron Palacios (2009)
Implementación, habilitación y diseño de prácticas de un laboratorio de un motor de gasolina,
evaluado por dinamómetro en el laboratorio de motores de combustión interna, de la escuela de
ingeniería mecánica de la Universidad de San Carlos de Guatemala.
Universidad de San Carlos de Guatemala
Iskra Antoni, Babiak Maciej (2007)
Real possibilities of construction of CI Wankel Engine.
Poznan University of Technology
Kelvin Fu, Aaron J. Knobloch, Fabian C Martinez, David C. Walther, Kenju Miyaska, K. Maruta
Design and experimental results of small-scale rotary engines.
2001 ASME International MEchanical Engineering Congress.
Lee C.H., Jiang K. C., Jin P., Prewett P.D. (2004)
Design and fabrication of a micro Wankel engine using MEMS technology.
Elsevier
Piotr Drogosz (2010)
Geometry of the Wankel rotary engine.
University of Warmia an Mazury, Technical Sciences Faculty, department of mechatrinics.

34
CAPITULO 8
BIBLIOGRAFIAS
Gabriel Barrientos Ríos (2011)
Elementos de máquinas.
Departamento de ingeniería mecánica, Universidad de Concepción.
Kenichi Yamamoto (1971)
The Rotary Engine.
Kenneth C. Weston (1992)
Energy Conversion, Chapter 7
Richard G. Budynas, J Keith Nisbett (2008)
Diseño en ingeniería mecánica de Shigley
8va. Edición. McGraww-Hill Companies, Inc.
Roger Canals Noguera (2011)
Motor rotativo Wankel, Estudio, diseño y construcción.
Proyecto final de carrera ingeniería técnica naval. Facultad náutica de Barcelona.
Santiago Sanz Acebes (2007)
Motores
Editorial Editex

35
ANEXO
A-1 Códigos EEs.
Cálculo factores de seguridad en eje. T_min=0 T_max=82,81 T_m=(T_max+T_min)/2 T_a=(T_max-T_min)/2 M_min=3900 M_max=4100 M_m=(M_max+M_min)/2 M_a=(M_max-M_min)/2 S_ult=1470*10^6 S_flu=1360*10^6 S_e´=0,5*S_ult S_e=Sum_k*S_e´ Sum_k=0,9 q=1 k_t=2,23 k_ts=1,75 kf=1+(k_t-1)*q Kfs=1+(k_ts-1)*q d=0,05 sigma_alt=((((32*kf*M_a)/(pi*d^3))^2+3*((16*kfs*T_a)/(pi*d^3))^2))^(1/2) sigma_med=((((32*kf*M_m)/(pi*d^3))^2+3*((16*kfs*T_m)/(pi*d^3))^2))^(1/2) sigma_max=(sigma_alt+sigma_med) N_flu=(S_flu/sigma_max) ((N_fat*sigma_alt)/(S_e))+((N_fat*sigma_med)/(S_ult))^2=1
Cálculo factores de seguridad en pernos. n_flutapa=(0,4*1360*10^6)/((42122,9/10)/(2,4*10^(-4))) n_fluperno=(0,4*74*9,8*10^6)/((42122,9/10)/(3,28*10^(-5))) f_max=42127,9/10 f_min=0 f_alterno=(f_max-f_min)/2 f_medio=(f_max+f_min)/2 sigma_alternotapa=(kf_c*f_alterno)/(2,4*10^(-4)) sigma_alternoperno=(kf_p*f_alterno)/(3,28*10^(-5)) sigma_mediotapa=(kf_c*f_medio)/(2,4*10^(-4)) sigma_medioperno=(kf_p*f_medio)/(3,28*10^(-5)) kf_c=1 kf_p=1 s_eperno=0,5*0,9*105*9,8*10^6 s_etapa=0,5*0,9*1470*10^6 s_uttapa=1470*10^6 s_utperno=105*9,8*10^6 1=((n_fatperno*sigma_alternoperno)/(s_eperno))+((n_fatperno*sigma_medioperno)/(s_utperno)) 1=((n_fattapa*sigma_alternotapa)/(s_eperno))+((n_fattapa*sigma_mediotapa)/(s_uttapa))

36
A-2 Código Matlab
Generación de Gráficos de Epitrocoide.
clear all
n=input ('ingrese el numero de graficos (entre 1 y 3):');
a=input ('ingrese el valor del ancho:');
for i=1:n
z(i)=input ('ingrese el valor de z(i):');
e=(a/(2*(1+z(i))))
R=z(i)*e
alfa=(0:0.1:360)*pi/180;
X=e*cos(3*alfa)+R*cos(alfa)
Y=e*sin(3*alfa)+R*sin(alfa)
clc
hold on
plot(X,Y)
end

37
A-3 Planos Mecánicos
A-3.1 Conjunto

38
A-3.2 Carcasa (SAE 4340)

39
A-3.3 Tapa lateral (SAE 4340)

40
A-3.4 Bases de soporte (SAE 4340)

41
A-3.5 Eje excéntrico (SAE 4340)

42
A-3.6 Engranajes (SAE 4340)

43
A-3.7 Pistón Rotatorio (SAE 4340)










![Motor Rotativo Wankel [Iago González 2º Bach A]](https://static.fdocuments.net/doc/165x107/55aea4111a28aba3058b4837/motor-rotativo-wankel-iago-gonzalez-2o-bach-a.jpg)




