Disclaimer - Seoul National...
125
저작자표시-비영리-변경금지 2.0 대한민국 이용자는 아래의 조건을 따르는 경우에 한하여 자유롭게 l 이 저작물을 복제, 배포, 전송, 전시, 공연 및 방송할 수 있습니다. 다음과 같은 조건을 따라야 합니다: l 귀하는, 이 저작물의 재이용이나 배포의 경우, 이 저작물에 적용된 이용허락조건 을 명확하게 나타내어야 합니다. l 저작권자로부터 별도의 허가를 받으면 이러한 조건들은 적용되지 않습니다. 저작권법에 따른 이용자의 권리는 위의 내용에 의하여 영향을 받지 않습니다. 이것은 이용허락규약 ( Legal Code) 을 이해하기 쉽게 요약한 것입니다. Disclaimer 저작자표시. 귀하는 원저작자를 표시하여야 합니다. 비영리. 귀하는 이 저작물을 영리 목적으로 이용할 수 없습니다. 변경금지. 귀하는 이 저작물을 개작, 변형 또는 가공할 수 없습니다.
Transcript of Disclaimer - Seoul National...

저 시-비 리- 경 지 2.0 한민
는 아래 조건 르는 경 에 한하여 게
l 저 물 복제, 포, 전송, 전시, 공연 송할 수 습니다.
다 과 같 조건 라야 합니다:
l 하는, 저 물 나 포 경 , 저 물에 적 된 허락조건 명확하게 나타내어야 합니다.
l 저 터 허가를 면 러한 조건들 적 되지 않습니다.
저 에 른 리는 내 에 하여 향 지 않습니다.
것 허락규약(Legal Code) 해하 쉽게 약한 것 니다.
Disclaimer
저 시. 하는 원저 를 시하여야 합니다.
비 리. 하는 저 물 리 목적 할 수 없습니다.
경 지. 하는 저 물 개 , 형 또는 가공할 수 없습니다.

Ph.D. DISSERTATION
EM-PLASMA COUPLED SCATTERING
ANALYSIS USING 3-D FDTD METHOD
3차원 FDTD 방법을 이용한 전자파와 플라즈마가
상호 결합된 산란 해석
AUGUST 2019
GRADUATE SCHOOL OF ELECTRICAL
ENGINEERING AND COMPUTER SCIENCE
SEOUL NATIONAL UNIVERSITY
YOUNGJOON LIM

공학박사 학위논문
EM-PLASMA COUPLED SCATTERING
ANALYSIS USING 3-D FDTD METHOD
3차원 FDTD 방법을 이용한 전자파와 플라즈마가
상호 결합된 산란 해석
2019 년 8 월
서울대학교 대학원
전기 • 컴퓨터공학부
임 영 준

EM-PLASMA COUPLED SCATTERING
ANALYSIS USING 3-D FDTD METHOD
지도 교수 남 상 욱
이 논문을 공학박사 학위논문으로 제출함
2019 년 8 월
서울대학교 대학원
전기 • 컴퓨터공학부
임 영 준
임영준의 공학박사 학위논문을 인준함
2019 년 8 월
위 원 장 서 광 석 (인)
부위원장 남 상 욱 (인)
위 원 오 정 석 (인)
위 원 고 일 석 (인)
위 원 정 경 영 (인)

i
Abstract
In this thesis, a three dimensional (3-D) finite-difference time-
domain (FDTD) method is presented to investigate the
electromagnetic (EM)-plasma coupled scatterings problems. Plasma
is assumed as fluid and its mathematical model is derived from the
momentum equations of the Boltzmann equation. The zeroth and the
first momentum equations are adequately adopted to perform
simulations according to the problem to be solved. The ion and
neutral are assumed to be fixed and only the electrons can move. The
electrons in the plasma move by the EM force applied from incident
EM waves, at which the current generated is coupled to the source
in the Maxwell’s equation and combined EM-plasma system is
generated. The contents of the study carried out are as follows.
First, a 3-D FDTD code was developed for EM analysis. The code
consists of an engine module for calculation of field components, a
source module for excitation of lumped circuit or plane waves, an
absorbing boundary condition (ABC) module for the absorption of
scattered EM waves and termination of the computational domain, and
a periodic boundary condition (PBC) module for the effective
simulation of periodic structures or layered media. The conventional
method proposed by Yee is adopted for the engine module. The
source module consists of a lumped resistive voltage source for
passive EM circuit analysis and a total-field/scattered-field source
for generating plane waves. Convolutional perfectly matched layer

ii
(CPML) is implemented as an ABC module. The PBC is implemented
using sin-cos method for single frequency analysis and then modified
to solve the electromagnetic nonlinear scattering problems within
plasma layer. The developed FDTD code was verified with some
simple examples including the analysis of patch antenna, microstrip
filters, and the calculation of reflection coefficient of plane waves on
half-space dielectric. The antenna and filter are validated using the
commercial EM software, CST MWS, and the calculation of reflection
coefficient of plane waves on half-space dielectric is verified using
the analytical solution. As a result, the FDTD simulation shows good
match to the commercial software and analytic estimation.
Second, electromagnetic waves that travels magnetized uniform
plasma is simulated. When a linearly polarized plane wave passes
through the plasma, it is divided into the left-hand circular-
polarization (LHCP) wave and the right-hand circular-polarization
(RHCP) wave and the waves travel with different velocities. At this
point, the Faraday rotation can be observed to the direction of
propagation. The plasma is modeled using the first order momentum
equation and it is discretized using the Yee's method. Plasma current
are then combined into the current source of the Maxwell’s equation.
Then, consistent EM-plasma coupled system of equations is solved
using the FDTD method. In this procedure, Boris method and the
predictor-corrector method are adopted to avoid the matrix
computation of the field that comes from the calculation of
electromagnetic force. The simulation results are well matched to the

iii
theoretical estimations of the Faraday rotation angle.
Third, using the developed FDTD code, a study on the nonlinear
scattering analysis that occurs when plane waves with different
frequencies were introduced on each side of plasma slab with a linear
electron density profile in a vertical direction was carried out. A plane
wave that enters at an angle in the direction of increasing electron
concentration is called signal wave. A plane wave that engages in the
opposite direction is called the pump wave and the pump wave has a
frequency that is significantly higher than the maximum plasma
frequency of the plasma slab. Under these conditions, the signal wave
cannot penetrate the plasma, and only the pump wave can penetrate
the plasma slab. If there is a layer within the plasma slab that has a
plasma frequency of frequency such as the signal wave, a scattered
wave with a frequency corresponding to the difference between the
signal wave and the pump wave occurs. At the layer, the Langmuir
oscillation occurs and this phenomenon is similar to the Raman
scattering in optics. To interpret this phenomenon, the zeroth and the
first momentum equations were discretized using the Yee's method.
Perturbed electron density, electron bulk velocity change, and
resulting plasma current are coupled to the Maxwell’s equation as
source. The simulation results showed good agreement with the
analytical estimation. As case studies, simulations were performed
for various electron density profiles and different incident angles of
signal wave. It was confirmed that the results performed well
reflected the existing theory.

iv
In conclusion, this thesis proposed an EM-plasma coupled FDTD
method for scattering analysis and the developed method is validated
using various examples. The developed method are well matched to
the analytic results.
Keywords: Finite-difference time-domain (FDTD), plasma physics,
nonlinear scattering, multi-physics analysis
Student Number: 2012-20851

v
Table of Contents
Abstract ....................................................................................... i
Table of Contents ...................................................................... v
List of Figures .......................................................................... ix
Chapter 1. Finite-Difference Time-Domain Method ............ 1
1.1. Introduction .................................................................. 1
1.2. Discretization and the Yee cell .................................... 3
1.3. Stability ....................................................................... 11
1.4. Absorbing Boundary Conditions ................................ 12
1.5. Validation .................................................................... 17
1.5.1. Microstrip antenna ............................................ 17
1.5.2. Microstrip Low Pass Filter ............................... 20
1.5.3. Reflection Coefficient of Electromagnetic Plane
Waves from Half-Space Dielectric ................... 22
1.6. Summary ..................................................................... 24
1.7. References .................................................................. 25

vi
Chapter 2. Plasma as Fluids ................................................... 29
2.1. Introduction ................................................................ 29
2.2. Continuity Equation: The Zeroth Order Moment
Equation ....................................................................... 33
2.3. Equation of Motion: The First Order Moment Equation
..................................................................................... 36
2.4. Energy conservation equation: The Second Order
Moment Equation ........................................................ 42
2.5. System of equations for EM-Plasma Coupled Problem
..................................................................................... 44
2.6. Summary ..................................................................... 45
2.7. References .................................................................. 46
Chapter 3. FDTD Simulation of Electromagnetic Wave
Propagation in Magnetized Plasma ......................................... 47
3.1. Introduction ................................................................ 47
3.2. Model Description ...................................................... 48
3.2.1. Physical Model ................................................... 48
3.2.2. FDTD Update Equations ................................... 50
3.2.3. Boundary Conditions ......................................... 59

vii
3.3. Numerical Results ...................................................... 61
3.4. Summary ..................................................................... 63
3.5. References .................................................................. 64
Chapter 4. FDTD Simulation of Three-Wave Scattering
Process in Time-Varying Cold Plasma Sheath .................... 67
4.1. Introduction ................................................................ 67
4.2. Model Description ...................................................... 70
4.2.1. Physical Model ................................................... 70
4.2.2. FDTD Update Equations ................................... 72
4.2.3. Boundary Conditions ......................................... 77
4.3. Numerical Results and Discussion ............................ 82
4.3.1. Linearly Increasing Electron Density Profile .. 84
4.3.2. Case Study: Effects of Electron Density Profiles
and Incident Angles of Signal Wave .................. 87
4.3.3. Discussion .......................................................... 93
4.3.4. Appendix: Source of the Scattered Wave ....... 96
4.4. Summary ..................................................................... 98
4.5. References .................................................................. 99

viii
Chapter 5. Conclusions ......................................................... 105
Abstract in Korean ................................................................ 107

ix
List of Figures
Fig. 1.1 Schematic diagrams on (a) the Yee cell and offsets in space
(b) offsets in time for leap-frog time-marching ..................... 5
Fig. 1.2 Offset feed microstrip antenna and its (a) Geometry (b) S11
result .......................................................................................... 18
Fig. 1.3 Microstrip antenna with matching stub and its (a) Fabrication
(b) S11 results ........................................................................ 19
Fig. 1.4 Microstrip low pass filter and its (a) Geometry (b) S-
parameter results .................................................................... 21
Fig. 1.5 Schematic of simulation for calculation of reflection
coefficients (a) Geometry (b) Reflection coefficient results 23
Fig. 3.1 Schematic of EM wave propagation in magnetized plasma
................................................................................................... 50
Fig. 3.2 Modified Yee-cell for EM-plasma coupled FDTD simulation.
................................................................................................... 52
Fig. 3.3 Rotational relation between two auxiliary vector fields. 56
Fig. 3.4 Flow chart for FDTD simulation with the Boris algorithm.
................................................................................................... 59
Fig. 3.5 Schematic periodic boundary condition for layered media.
................................................................................................... 61
Fig. 3.6 Simulation results of Faraday rotation: (a) Faraday rotation
according to the change of magnetic field (b) Visualization of
Faraday rotation for B0 = 1.7 [T]. .............................................. 63
Fig. 4.1 Schematic of three-wave scattering process. ............... 72

x
Fig. 4.2 Modified Yee-cell for EM-plasma coupled FDTD simulation.
................................................................................................... 74
Fig. 4.3 Schematic periodic boundary condition for layered media.
................................................................................................... 79
Fig. 4.4 Magnitude of magnetic field of scattered wave for linearly
increasing electron density profile. ........................................ 86
Fig. 4.5 Background electron density (𝑁0) profiles for case study.
................................................................................................... 89
Fig. 4.6 Magnitude of magnetic field of scattered wave for different
electron density profiles. ........................................................ 90
Fig. 4.7 Magnitude of perturbed electron density for different
electron density profiles: (a) Linear, (b) Bi-Gaussian, (c)
Quadratic .................................................................................. 92
Fig.4.8 Magnitude of magnetic field of scattered wave for different
incident angles of signal wave. ............................................... 93
Fig. 4.9 Time record of magnetic field apart from the five Yee-cells
from the source point for different CFLNs. ........................... 96
Fig. 4.10 The magnitude of slope value for different electron density
profiles. .................................................................................... 98

1
Chapter 1. Finite-Difference Time-Domain Method
1.1. Introduction
The finite-difference time-domain (FDTD) method was originally
proposed by K. S. Yee in 1966 [1]. After Yee’s seminal work, the
FDTD method has been the most widely used computational
electromagnetic (CEM) algorithm courtesy of ongoing advances of
computer technology including parallel computing. The Yee’s method
discretize the time-domain Maxwell’s equations from differential
form to difference form in the time and space domain through the
central differential scheme (CDS) and time-marching it in the leaf-
frog manner. There are a lot of textbooks on the FDTD method due
to its usefulness [2-6]. Among them, the most widely used book
written by Taflove describes the advantages of the FDTD method as
below [3].
1. FDTD uses no linear algebra
2. FDTD is accurate and robust
3. FDTD treats impulsive behavior naturally.
4. FDTD treats nonlinear behavior naturally.
5. FDTD is a systematic approach.
In addition, a lot of commercial CEM software using the FDTD method
has developed and widely used for EM analysis [7], [8].

2
Limitations of the Yee’s method are as below.
1. Time step for field update is limited to guarantee the stability.
2. It is hard to model the curved object due to the shape of the
Yee cell.
Limitation for time step has been overcome using some implicit
algorithms including alternating direction implicit (ADI) and locally
one dimensional (LOD) methods [9-11]. Nonuniform gridding,
conformal techniques, and subcell modeling methods are available to
overcome the curved object problem. In this thesis, we adopted the
conventional Yee method for the simplicity.
Application of the FDTD method includes biomedical engineering,
ground penetrating radar (GPR), photonics, circuit analysis, etc.
[12-15]. Also, various physics could be analyzed by using the FDTD
method including quantum simulation and acoustics [16]. Recently,
multi-physics analysis including EM-plasma is considered as key
application area of the FDTD method [17].

3
1.2. Discretization and the Yee cell
The Yee’s method replaces the time-domain Maxwell’s equation
from differential forms to difference form using CDS. The differential
form of Maxwell’s equations in source-free region is as below.
( )( ) ( )
D tE t H t
t (1.1)
*( )( ) ( )
B tH t E t
t (1.2)
σ and σ∗ are electric conductivity and magnetic conductivity,
respectively. They becomes zero in lossless media and free-space.
Equations (1.1)-(1,2) are vector partial differential equations (PDE)
and could be decomposed into 6 scalar PDEs as shown below
yx zx
HD HE
t y z (1.3)
y x zy
D H HE
t z x (1.4)
yz xz
HD HE
t x y (1.5)

4
* yx zx
EB EH
t z y (1.6)
*y z xy
B E EH
t x z (1.7)
* yz xz
EB EH
t y x (1.8)
Field components are discretized in computational domain using the
Yee cell and they have offsets in space and time as depicted in Fig.
1.1. Discretized equations for x-components of the electric flux
density and the magnetic flux density are as below.
1
1, , , ,
, , , ,
0.5 0.50.5 0.5
, , , 1, , , , , 1
2
n n
n nx xi j k i j k
x xi j k i j k
n nn n
y yz zi j k i j k i j k i j k
D DE E
t
H HH H
y z
(1.9)
0.5 0.5*
0.5 0.5, , , ,
, , , ,
, , 1 , , , 1, , ,
2
n n
n nx xi j k i j k
x xi j k i j k
n n n n
y y z zi j k i j k i j k i j k
B BH H
t
E E E E
z y
(1.10)
Each flux densities (D, B ) and field intensities (E, H ) are related by
the dispersion relations as shown in (1.11)-(1.12).

5
(a)
(b)
Fig. 1.1 Schematic diagrams on (a) the Yee cell and offsets in space
(b) offsets in time for leap-frog time-marching
n 0.5n 1n0.5n
/ 2t
t

6
( ) ( ) ( )D E (1.11)
( ) ( ) ( )B H (1.12)
where, 𝜀 and 𝜇 are permittivity and permeability of the media. In
case of non-dispersive media, permittivity and permeability are
constant and (1.11)-(1.12) are written as below in time domain.
0 r
D E (1.13)
0 r
B H (1.14)
where 𝜀0 , 𝜀𝑟 , 𝜇0 , 𝜇𝑟 are permittivity in free-space, relative
permittivity of the media, permeability of free-space, and relative
permeability of the media, respectively. For dispersive media, D and
E are related with convolution as shown in (1.15).
0 0 0
( ) ( ) ( )
( ) ( ) ( )t
D t t E t
E t E t d (1.15)
where 𝜒(𝜔) is electric susceptibility of the media and related with
the permittivity as shown in (1.16)
0
( ) [ ( )] (1.16)

7
For single pole Debye model, 𝜒(𝜔) is described in form of (1.17) and
its time domain representation for the FDTD method is described in
(1.18).
0
( )1
s
j t (1.17)
0/
0
( ) ( )t tst e u t
t (1.18)
Various techniques could be applied for the effective calculation of
the convolution integral in (1.15). Auxiliary differential equation
(ADE) method and recursive convolution (RC) method are typical
method for the convolution integral [3]. In this thesis, we assumed
the media to be dispersive and its model is described by the Debye
single pole model. Then, piecewise linear recursive convolution
(PLRC) method is adopted for effective and accurate calculation of
the convolution integral [18]. Final FDTD update equations for
electric field intensities are described as shown below.

8
0
10
, , , , , ,0 0 0 0
0 0
0.5 0.50.5 0.5
, , , 1, , , , , 10
0 0
0
2 1
2 2
/
2
n n n
x x xi j k i j k i j k
n nn n
y yz zi j k i j k i j k i j k
t
E Et t
H HH Ht
t y z
(1.19)
0
10
, , , , , ,0 0 0 0
0 0
0.5 0.5 0.5 0.5
, , , , 1 , , 1, ,0
0 0
0
2 1
2 2
/
2
n n n
y y yi j k i j k i j k
n n n n
x x z zi j k i j k i j k i j k
t
E Et t
H H H Ht
t z x
(1.20)
0
10
, , , , , ,0 0 0 0
0 0
0.5 0.5 0.5 0.5
, , 1, , , , , 1,0
0 0
0
2 1
2 2
/
2
n n n
z z zi j k i j k i j k
n n n n
y y x xi j k i j k i j k i j k
t
E Et t
H H H Ht
t x y
(1.21)
where,

9
0/0 0 0 1 1t tn n n nE E e (1.22)
0 0/ /
1t t m t tm
se e (1.23)
0 0/ /0
0
1 1t t m t tm
s
t te e
t t (1.24)
0/1 t tm me (1.25)
0/1 t tm me (1.26)
In this thesis, we assumed that the all media to be modeled are
magnetically non-dispersive media. Then relation between B and H
are as below.
0
B H (1.27)
Final FDTD update equations for magnetic field intensities are
described as shown below.
0.5 0.5 , , 1 , , , 1, , ,
, , , ,0
n n n n
y yn n z zi j k i j k i j k i j k
x xi j k i j k
E E E EtH H
z y
(1.28)

10
0.5 0.5 1, , , , , , 1 , ,
, , , ,0
n n n n
n n z z x xi j k i j k i j k i j k
y yi j k i j k
E E E EtH H
x z
(1.29)
0.5 0.5 , 1, , , 1, , , ,
, , , ,0
n nn n
y yn n x xi j k i j k i j k i j k
z zi j k i j k
E EE EtH H
y x
(1.30)

11
1.3. Stability
It is critical to determine appropriate time intervals before
performing the FDTD simulations to ensure the stability of the
simulation. When the grid interval is determined once, time interval
is automatically determined by the Courant–Friedrichs–Lewy number
(CFLN) [2]. The CFLN of the simulation is determined to be less
than one to ensure the stability of the FDTD simulation of Maxwell’s
equations. The CFLN in free space is defined as
c t NCFLN
x (1.31)
where 𝑐, 𝛥𝑡, 𝑁, and 𝛥𝑥 are the velocity of light in free space, time
interval, dimension of simulation, and grid interval, respectively.

12
1.4. Absorbing Boundary Conditions
Computational domain of the PDE based CEM algorithms including
FDTD and FEM should be terminated using appropriate boundary
conditions. In case of the FDTD method, the outermost boundaries
are automatically terminated with perfect electric conductor (PEC)
or perfect magnetic conductor (PMC) according to the types of
outermost field components (PEC for E-field termination, PMC for
H-field termination). For radiation problems, absorbing boundary
condition (ABC) should be applied to the computational domain to
prevent return of the reflected wave from the outermost boundary to
interested computational region. Mur’s scheme, Higdon radiation
operator, and Engquist-Majda scheme are typical analytical ABCs
[3]. In this thesis, we adopted perfectly matched layer (PML)
proposed by Berenger as absorbing boundary condition [19]. The
PML has been widely used in many FDTD researches and even
commercial software due to its powerful performance. In this thesis,
we applied the convolutional PML (CPML) to terminate the
computational domain [20]. Implementation of the CPML is briefly
described as below and details in this chapter draw from number of
source textbooks, primarily the book by Taflove and Gedney [3], [4].
Chew and Weedon showed that the PML can be posed in a stretched
coordinate frame with complex metric-tensor coefficients [21]. The
partial derivatives in the stretched coordinate space are expressed
as:

13
1 1 1, ,
x y zx s x y s y z s z
(1.32)
Then, time harmonic Maxwell’s equations are described in the
complex-coordinate space as:
j D E H (1.33)
j B E (1.34)
Equation (1.33)-(1.34) are decomposed into six scalar differential
equations as:
For Electric flux density
1 1 yzx x
y z
HHj D E
s y s z (1.35)
1 1x zy y
z x
H Hj D E
s z s x (1.36)
1 1y xz z
x y
H Hj D E
s x s y (1.37)
For magnetic flux density,

14
0
1 1y zx
z y
E Ej H
s z s y (1.38)
0
1 1z xy
x z
E Ej H
s x s z (1.39)
0
1 1 yxz
y x
EEj H
s y s x (1.40)
The six time harmonic differential equations are then transformed to
time-domain equations to be used for the FDTD method as shown
below.
( )* ( )*yx z
x y z
HD HE s t s t
t y z (1.41)
( )* ( )*y x z
y z x
D H HE s t s t
t z x (1.42)
( )* ( )*y x z
y z x
D H HE s t s t
t z x (1.43)
where,

15
0
, , , or ii i
i
s i x y zjw
(1.44)
0 0(( / ) ( / ))
2
0
( )( ) ( )
( )( )
i i i tii
i i
i
i
ts t e u t
tt
(1.45)
‘ ∗ ’ and 𝑢(𝑡) are convolution operator and unit step function,
respectively.
Using the PLRC technique, the calculation of the convolution integral
can be effectively implemented. For example, discretized form of
(1.41) is as shown below:
1
1, , , ,
, , , ,
0.5 0.50.5 0.5
, , , 1, , , , , 1
0.5 0.5
, , , ,
2
1 1
XY XZ
n n
n nx xi j k i j k
x xi j k i j k
n nn n
y yz zi j k i j k i j k i j k
y z
n n
E Ei j k i j k
D DE E
t
H HH H
y z
(1.46)
where,
0.5 0.5
0.5 0.5, , , 1,
, , , ,XY XY
n n
n n z zi j k i j k
E y E yi j k i j k
H Hb a
y (1.47)

16
0.5 0.5
0.5 0.5, , , , 1
, , , ,XZ XZ
n n
n n y yi j k i j k
E z E zi j k i j k
H Hb a
z (1.48)
0(( / ) )( / ), ( 1),
( )
, , or
i i i t ii i i
i i i i
b e a b
i x y z (1.49)
Update equation for x-component of magnetic field intensity in PML
is:
0.5 0.5
, , , , , , 1 , , , 1, , ,
0
, , , ,
1 1
XZ XY
n nn n n n
y yx x z zi j k i j k i j k i j k i j k i j k
z y
n n
H Hi j k i j k
E EH H E E
t z y
(1.50)
1, , 1 , ,
, , , ,XZ XZ
n n
n n y yi j k i j k
H z H zi j k i j k
E Eb a
z (1.51)
1, 1, , ,
, , , ,XY XY
n n
n n z zi j k i j k
H y H yi j k i j k
E Eb a
y (1.52)
Update equations for other components could be derived easily using
cyclic rule of the Maxwell’s equation.

17
1.5. Validation
Some validation examples are simulated to ensure the accuracy of
the developed FDTD codes. Examples are calculations of the S-
parameters of passive planar circuits and reflection coefficient of the
plane wave from half-space dielectric. Simulation results are verified
with commercial software and analytic solutions.
1.5.1 Microstrip Antennas
First, conventional offset feed rectangular patch antenna was
simulated using developed code. Design procedures for patch antenna
is well written in many textbooks on antennas [22], [23]. Resistive
voltage source was applied to excite the antenna and its internal
impedance was 50 Ω. Computational domain was terminated using
10-cell CPML. Design parameters and its simulation result are
depicted in Fig 2.2. Simulation result is compared with CST MWS, a
commercial EM software, and the result shows good agreement with
the CST result. It is considered that errors in S-parameter result are
due to the quality of mesh used in each simulation.
Second, microstrip antenna with matching stub is designed and
simulated. Simulated result is compared with CST MWS and its
fabrication as depicted in Fig. 1.3. The result shows good agreement
with the CST and fabrication result. Ripples in result are due to strong
resonant of the antenna and can be solved using signal processing.

18
(a)
(b)
Fig. 1.2 Offset feed microstrip antenna and its (a) Geometry (b) S11
result

19
(a)
(b)
Fig. 1.3 Microstrip antenna with matching stub and its (a) Fabrication
(b) S11 results

20
1.5.2 Microstrip Low Pass Filter
As a validation example for multi-port passive circuits, microstrip
low pass filter is simulated. Ports are set as resistive voltage source
with its internal impedances of 50 Ω and the outermost boundary of
the computational domain was terminated with 10-cell CPML. Design
parameters and its simulated S-parameter results are shown in Fig.
2.4. Simulation results are compared with CST MWS and the results
show good agreement with the CST result. It is considered that
errors in S-parameter result are due to the quality as described in
1.6.1.

21
(a)
(b)
Fig. 1.4 Microstrip low pass filter and its (a) Geometry (b) S-
parameter results

22
1.5.3 Reflection Coefficient of Electromagnetic Plane Wave
from Half-Space Dielectric
Lastly, reflection coefficients of the plane EM wave from half-space
dielectric are calculated using the FDTD codes. The half-space
dielectric is parallel to xy-plane and boundaries in x-, y- direction
is set as periodic boundary condition PBC using sin-cos method [3].
CPML is used in z-direction to absorb transmitted and reflected EM
waves. Plane waves are excited by total-field scattered-field
(TF/SF) boundary condition [3]. The schematic and results of the
simulation are shown in Fig 2.5. Relative permittivity of the dielectric
and azimuthal angle of the incident wave is set to be 4.0 and 0°,
respectively. Elevation angle of the incident wave varies from 𝜃 = 0°
to 𝜃 = 0° for transverse electric (TE) and transverse magnetic (TM)
polarizations. The FDTD simulation results are compared with the
analytic solution in textbook [24]. It can be shown in Fig. 1.5 that
simulation results are well matched to the analytic solutions.

23
(a)
(b)
Fig. 1.5 Schematic of simulation for calculation of reflection
coefficients (a) Geometry (b) Reflection coefficient results

24
1.6. Summary
In this section, basic theory and its implementation of the FDTD
method is introduced. Developed code supports single pole Debye
model for dispersive dielectric and CPML is also implemented to
terminate computational domain. Some validation examples are
simulated and the results are well matched to the results of
commercial software and the analytic solutions. It can be concluded
that the developed FDTD codes are accurate and available as basic
framework of multi-physics simulation in future work.

25
1.7. References
[1] Kane S. Yee, “Numerical Solution of Initial Boundary Value
Problems Involving Maxwell’s Equations in Isotropic Media,”
IEEE Trans. Antennas Propag., vol. AP-66, no. 3, pp. 302–307,
May. 1966.
[2] K. S. Kunz and R. J. Luebbers, The Finite Difference
Tiime-Domain Method for Electromagnetics. Boca Raton, FL:
CRC Press, 1993.
[3] A. Taflove and S. C. Hagness, Computational
Electrodynamics.2nd ed. Norwood, MA, USA: Artech House,
2005.
[4] S. Gedney, Introduction to the Finite-Difference Time-
Domain (FDTD) Method for Electromagnetics. Morgan &
Claypool, 2011.
[5] W. Yu, R. Mittra, T. Su, Y. Liu, and X. Yang, Parallel Finite-
Difference Time-Domain Method. Norwood, MA, USA: Artech
House, 2006.
[6] A. Elsherbeni and V. Demir, The Finite-Difference Time-
Domain Method for Electromagnetics with MATLAB
Simulations, MA, USA: SciTech Publising, Inc. Raleigh, NC,
2009.
[7] SEMCAD X, [Online] Available: http://speag.swiss
[8] REMCOM XFDTD, [Online] Available:
http://www.remcom./xfdtd-3d-em-simulation-software

26
[9] T. Namiki, “A New FDTD Algorithm Based on Alternating-
Direction Implicit Method,” IEEE Trans. Antennas Propag., vol.
47, no. 10, pp. 2003–2007, Oct. 1999.
[10] J. Shibayama, M. Muraki, J. Yamauchi, and H. Nakano,
“ Efficient implicit FDTD algorithm based on locally one-
dimensional scheme,” Electron. Lett., vol. 41, no. 19, Sep. 2005.
[11] E. L. Tan, “ Fundamental Schemes for Efficient
Unconditionally Stable Implicit Finite-Difference Time-Domain
Methods,” IEEE Trans. Antennas Propag., vol. 56, no. 1, pp.
170–177, Jan. 2008.
[12] J. D. Shea, P. Kosmas, S. /c. Hagness, and B. D. Van Veen,
“Three-dimensional Microwave Imaging of Realistic Numerical
Breast Phantoms via a Multiple-Frequency Inverse Scattering
Technique,” Medical Physics, vol. 37, pp. 4210–4226, Aug. 2010.
[13] J. M. Bourgeois and G. S. Smith, “ A Fully Three-
Dimensional Simulation of a Ground-Penetrating Radar: FDTD
Theory Compared with Experiment, ” IEEE Trans. Geosci.
Remote Sensing, vol. 34, no. 1, pp. 36-44, Jan 1996.
[14] S. T. Chu and S. K. Chaudhuri, “A Finite-Difference Time-
Domain Method for the Design and Analysis of Guided-Wave
Optical Structures,” J. Lightwave Technology, vol. 7, no. 12, pp.
2033-2038, Dec 1989.
[15] D. M. Sheen, S. M. Ali, M. D. Abouzahra, and J. A. Kong,
“ Application of the Three-Dimensional Finite-Difference
Time-Domain Method to the Analysis of Planar Micristrip

27
Circuits,” IEEE Trans. Microw. Theory Techn., vol. 38, no. 7, pp.
849-857, July 1990.
[16] D. M. Sullivan, Electromagnetic Simulation using The
FDTD Method, NJ, USA: Wiley-IEEE Press, 2000.
[17] B. Chaudhury and J. –P. Boeuf, “Computational Studies of
Filamentary Pattern Formation in a High Power Microwave
Breakdown Generated Air Plasma,” IEEE Trans. Plasma Sci., vol.
38, no. 9, pp. 2281–2288, Sep. 2010.
[18] D. F. Kelley and R. J. Luebbers, “ Piecewise Linear
Recursive Convolution for Dispersive Media Using FDTD,” IEEE
Trans. Antennas Propag., vol. 44, no. 6, pp. 792–797, June. 1996
[19] J. P. Berenger, “ A Perfectly Matched Layer for the
Absorption of Electromagnetic Waves, ” J. Computational
Physics, vol. 114, no. 6, pp. 185-200, June. 1994
[20] J. A. Roden, and S. D. Gedney, “Convolutional PML (CPML):
An efficient FDTD implementation of the CFS-PML for arbitrary
media,” Microw. Opt. Technol. Lett., vol. 27, pp. 334–339, Dec.
2000.
[21] W. C. Chew and W. H. Weedon, “A 3-D Perfectly Matched
Medium from Modified Maxwell’s Equations with Stretched
Coordinates,” Microw. Opt. Technol. Lett., vol. 7, no. 13, pp.
599–604, Sep. 1994.
[22] C. A. Balanis, Antenna Theory: Analysis and Design. Third
Edition. Hoboken, NJ, USA: John Wiley & Sons, Inc., 2005.

28
[23] R. E. Collin, Antennas and Radiowave Propagation.
McGraw-Hill, 1985.
[24] D. K. Cheng, Field and Wave Electromagnetics. Second
Edition. Addison-Wesley Publishing Company, Inc., 1989.

29
Chapter 2. Plasma as Fluids
2.1 Introduction
Plasma in physics is an ionized gas in which at least one of the
electrons in an atom has been stripped free, leaving a positively
charged nucleus, called an ion [1-6]. In more precise manner,
definition for the plasma is as follows [1]:
“A plasma is a quasineutral gas of charged and neutral particles which
exhibits collective behavior.”
The three conditions a plasma must satisfy are as follows [1]:
1. 𝜆𝐷 ≪ 𝐿
2. 𝑁𝐷 ≫ 1
3. 𝜔𝑝𝜏 > 1
where 𝜆D , 𝑁D , 𝜔𝑝 , and 𝜏 are the Debye length, the number of
particles in Debye sphere, the plasma frequency, and the mean time
between collisions with neutral atoms, respectively. The most of
plasma exist in space and a few examples of plasma are available in
our atmosphere, the light of a fluorescent tube, or a plasma display.
The reason for this can be seen from the Saha equation below [1].

30
3/2/k212.4 10 i B Ti
n i
N Te
N N (2.1)
where 𝑁𝑖 and 𝑁𝑛 are the density of ionized atoms and of neutral
atoms, respectively. T is the gas temperature in °K and 𝑘𝐵 is
Boltzmann’s constant. Φ𝑖 is the ionization energy of the gas. The
Saha equation tells the ionization to be expected in a gas in thermal
equilibrium. For ordinary air at room temperature, the fractional
ionization can be expected to be almost zero.
To describe the motion of the single charged particle of plasma,
Newton’s second law (the equation of motion) can be applied to
calculate the motion of the particle. In that case, the forces in the
Newton’s law consist of EM force, gravitational force, and centrifugal
force, and so on. For more complicated many particle plasma,
however, the electric field and magnetic fields are not prescribed and
there should be a self-consistent method to solve the problem. The
motion of each particle should be solved simultaneously and it
requires large computational cost. Fortunately, the majority of
plasma phenomena observed in real experiments can be explained by
a rather crude model. We call the model as fluid model and the fluid
model is derived from the momentum equations of the Boltzmann
equation below [1].

31
( )
r
c
f F f fv f
t m v t (2.2)
Here we assume that the location of each particle is represented by
a position vector 𝑟. We also define the linear velocity of the particle
as shown below [2].
x y zv xv yv zv (2.3)
In (2.2), is the force acting on the particles, and (∂f/ ∂t)𝑐 is the
time rate of change of 𝑓 due to collisions. 𝑓 is the velocity
distribution function of six scalar variables (x, y, z, v𝑥 , v𝑦, v𝑧 , t). 𝑓 can
be considered as probability density function of plasma species in
which the probability of the particle’s existence is defined in seven-
dimensional phase space. By definition of the velocity distribution
function, the total number of particles at 𝑟 , 𝑁(𝑟, 𝑡)d𝑟 , of velocity
points in the entire velocity space is calculated as shown below.
( , ) ( , , )dN r t f r v t v
(2.4)
The momentum equations are derived from the Boltzmann’s
equation. Macroscopic quantities of particle are calculated by
averaging as shown below.

32
1( , ) ( , , ) ( , , ) ( , , )d
( , )avg r t g r v t g r v t f r v t v
N r t
(2.5)
Here, 𝑔(𝑟, , t) is any property to be averaged. Details for derivations
of the momentum equations are described from section 2.2 to 2.4 and
the notations follow the Inan’s textbook [2]. However, many other
textbooks are also available to study the derivation of the momentum
equations.

33
2.2 Continuity Equation: The Zeroth Order Moment
Equation
First, we derive the continuity equation, which is a statement of
conservation of charge and mass. To evaluate the zeroth order
moment, we multiply (2.2) by 𝑣0 = 1 and integrate in velocity space.
Then, (2.2) changes to the equation below[2].
( ) [( ) ] dvr v
c
f qdv v fdv E v B f
t m
fdv
t
(2.6)
where 𝑑 = 𝑑𝑣𝑥𝑑𝑣𝑦𝑑𝑣𝑧 and (𝜕𝑓
𝜕𝑡)
𝑐 is schematically represented term
of the resultant net gain or loss of particles due to collisions. By
definition, the first term is
( , )f
dv fdv N r tt t t (2.7)
The second term is

34
( )
( , )
( , ) (r,t)
r x y z
x y z
r
r
v fdv v fdv v fdv v fdvx y z
v fdv v fdv v fdvx y z
N r t v
N r t U
(2.8)
where (𝑟, 𝑡) is the average plasma velocity or “fluid” velocity.
For the third term, effect of the electric field and magnetic field can
be evaluated, separately. For electric field,
dv ( )dv 0
v
v v vS
E f fE fE ds
(2.9)
We have used the divergence theorem in velocity space and the
convergence characteristics of the Maxwellian distribution.
For magnetic field, it can be calculated in similar manner with the
electric field case. Then, the effect of the magnetic field becomes
zero. The collision term also vanishes as below [2].

35
0
c
fdv f dv
t t (2.10)
We assumed that the total number of particles of the species
considered must remain constant as collisions proceed.
After evaluations for each term, the final equation is derived below.
( , ) ( , ) ( , ) 0r
N r t N r t U r tt
(2.11)
Equation (2.11) is the continuity equation for mass or charge
transport which is a statement of the conservation of particles.

36
2.3 Equation of motion: The First Order Moment
Equation
The equation of motion for fluid model of plasma is obtained by
multiplying by 𝑚 and integrating to find
( ) [( ) ] dvr v
c
fm v dv m v v fdv q v E v B f
tf
mv dvt
(2.12)
The first term is evaluated as
( , ) ( , )m vfdv m N r t U r tt t
(2.13)
It is because the definition of the mean plasma velocity or “fluid”
velocity is defined as
1( , )
( , )U r t v vfdv
N r t (2.14)

37
Third term is evaluated using the new vector defined as
G E v B (2.15)
Then, the third term becomes
dv dvv x y z
x y z
f f fq v G f q vG vG vG
v v v
(2.16)
Evaluation of the integral can be performed separately; integrating
by parts. Then,
dv
( , )
x x y z x
x x
x y z x
x
x x y z
x
x
x
f fq vG q G dv dv v dv
v v
vq G dv dv vf f dv
v
vq G f dv dv dv
v
vqN r t G
v
(2.17)
Finally, (2.12) can be evaluated using (2.16) as

38
dv ( , )v v
q v G f qN r t Gv (2.18)
where the term is a tensor product.
Using the properties of tensor product, (2.18) is evaluated as
( , ) ( , )
( , )( )v
qN r t Gv qN r t G
qN r t E U B
(2.19)
The second term is evaluated as
( ) (f )
f
[ ]
r r
r
r
m v v fdv m vv dv
m m vvdv
m Nvv (2.20)
can be separated into an average velocity and a random
(thermal) velocity w. Then we have

39
[ ] [ ]
m [ ]
[ ]
r r r
r
r r
m Nvv m NUU m N ww
NU w w U
m NUU m N ww
(2.21)
Because
0w (2.22)
The first term of the right hand side in (2.21) is evaluated as
r r rm NUU mU NU mN U U
(2.23)
The second term of the right had side in (2.21) is evaluated with new
pressure tensor Ψ as
xx xy xz
yx yy yz
zx zy zz
p p p
mN ww p p p
p p p
(2.24)
Final form of the equation of the motion is then described as below.

40
( )i i i ij
dumN qN E U B S
dt
(2.25)
Collision term is denoted by S𝑖𝑗 and represents the rate of change of
momentum density due to collisions between different plasma
species i and j.
The calculation of tensor product or dyad 𝐴 used in this section is
summarized below.
x x x y x z
y x y y y z
z x z y z z
A B A B A B
AB A B A B A B
A B A B A B (2.26)
The tensor dot product is itself a vector, defined as
( )x x x y x z x
y x y y y z y
z x z y z z z
A B A B A B C
AB C A B A B A B C
A B A B A B C
(2.27)

41
( )x x x y x z
x y z y x y y y z
z x z y z z
A B A B A B
C AB C C C A B A B A B
A B A B A B
(2.28)
Some useful identities are as shown below.
( ) ( ) ( )AB C A B C C B A (2.29)
( ) ( )C AB C A B (2.30)
( ) ( ) ( )AB B A A B (2.31)

42
2.4 Energy Conservation Equation: The Second
Order Moment Equation
The energy conservation equation for fluid model of plasma is
obtained by multiplying the Boltzmann’s equation by 1
2𝑚𝑣2 and
integrating over velocity space. It starts from
2 2 2
2
( ) [( ) ] dv2 2 2
2
r v
c
m f m qv dv v v fdv v E v B f
tm f
v dvt
(2.32)
The first term is evaluated as
2 21
2 2
m fv dv N mU
t
(2.33)
The second term is
2 21( )
2 2r r
mv v fdv N m U U
(2.34)
The third term is

43
2[( ) ] dv 02 v
qv E v B f qN E U
(2.35)
Final form of the energy conservation equation is then,
2 21 1
2 2r collN mU N m U U qN E U S
t
(2.36)
where 𝑆𝑐𝑜𝑙𝑙 is evaluation of the integral for the collisional effect in
(2.32) as shown below.
2
2coll
c
m fS v dv
t
(2.37)

44
2.5 System of Equations for EM-Plasma Coupled
Problem
Based on the momentum equations, the system of equations for
EM-Plasma coupled problem is described as shown below. We
assumed that the plasma is cold and the electron only plasma. Then,
0r
N NUt
(2.38)
( ) ( )r eff
dUmN U U p qN E U B mN U
dt
(2.39)
3 3
2 2r collp pU p U q S
t
(2.40)
where,
B
p Nk T (2.41)
2( /2)q N w w (2.42)
The Maxwell’s equations are also included in the system of equations
to be self-consistent.

45
2.6 Summary
In this section, basic plasma physics and its fluid model
descriptions are introduced. To be modeled as fluid, the momentum
equations are derived from the Boltzmann’s equation. Zeroth, first,
second momentum equations are the continuity equation, the equation
of the motion, and energy conservation equation, respectively.
Derived momentum equations are used as a part of the system of
equations in which the EM-plasma coupled problems are solved.

46
2.7 References
[1] F. F. Chen, Introduction to Plasma Physics and Controlled
Fusion.2nd ed. New York, NY, USA: Plenum Press, 1984.
[2] U. Inan and M. Golkowski, Principles of Plasma Physics for
Engineers and Scientists, 1st ed. Cambridge, U.K.: Cambridge Univ.
Press, 2011.
[3] K. G. Budden, Radio Waves in the Ionosphere, 1st ed.
Cambridge, U.K.:Cambridge Univ. Press, 1961.
[4] V. L. Ginzburg, The Propagation of Electromagnetic Waves
in Plasmas. 2nd ed. New York, NY, USA: Pergamon, 1970.
[5] M. A. Lieberman, A. J. Lichtenberg, Principles of Plasma
Discharges and Materials Processing. 2nd ed. Hoboken, NJ,
USA: John Wiley & Sons, Inc., 2005.

47
Chapter 3. FDTD Simulation of Electromagnetic
Wave Propagation in Magnetized Plasma
3.1. Introduction
EM wave propagation in ionosphere and magnetosphere is critically
important for investigations of space weather hazards, satellite
communications, radar, remote-sensing, and for ionospheric
modification experiments [1-4]. Ionosphere and magnetosphere can
be modeled as magnetized plasma and the full-vector Maxwell’s
equations FDTD method has widely been used for solving the
Maxwell’s equation in the plasma [5-14]. In this chapter, we
introduce an FDTD methodology for solving the Maxwell’s equations
and the equation of motion for electrons in plasma simultaneously.
The FDTD method for EM analysis is same with the method
introduced in Chapter 1. We modeled the plasma as electron only cold
plasma and fluid model is adopted for describe the motion of the
electrons [15]. The equation of motion of the electrons are solved
using Boris method which is widely implemented in particle in cell
(PIC) simulations [16], [17]. In case of collisional plasma, predictor-
corrector method is applied to maintain the Boris’ scheme.
As a validation example, Faraday rotation is simulated and the results
are compared with the analytic solutions. Details are described in
sections follows.

48
3.2. Model Description
3.2.1 Physical Model
The schematic for the simulation of electromagnetic wave
propagation in magnetized plasma is shown in Fig. 3.1. The plasma is
modeled as half-space media that is parallel to the xy-plane. We
assume that electron density of the plasma is not perturbed by the
EM wave. A monochromatic plane wave is normally launched from
left side of the plasma. We assume that the plasma is magnetically
biased with B0 = B0 where is unit vector along z-axis. According
to plasma theory, a linearly polarized plane wave propagating in a
direction parallel to the direction of the applied magnetic field will be
decomposed to a right-hand (RH) and a left hand (LH) circularly
polarized wave with different phase velocities [14]. This causes the
plane of polarization of the linearly polarized wave to rotate as the
wave propagates through the plasma. The rotation angle per unit
distance θ𝐹𝑅 can be written as [14]
2LH RH
FR (3.1)
where,
2
0 0
/1
pe
LH
ce (3.2)

49
2
0 0
/1
pe
RH
ce (3.3)
`𝜔𝑝𝑒 and `𝜔𝑐𝑒 are the plasma frequency and cyclotron frequency of
the electron, respectively. 𝜔 is frequency of the incident EM wave.
Fig. 3.1 Schematic of EM wave propagation in magnetized plasma

50
3.2.2 FDTD Update Equations
We assume the plasma is electron only cold plasma and the electron
density 𝑁0 is time invariant. Then, the behavior of electrons in
plasma can be analyzed using the system of equations below.
0
HE
t (3.4)
0
EH J
t (3.5)
( )e
e
qUU E U B
t m (3.6)
where 𝑎𝑛𝑑 are the velocity of electrons and electric current
density, respectively. They are related according to the equations
given below.
0 e
J N q U (3.7)
𝑞𝑒 and 𝑚𝑒 are the charge quantity and mass of an electron,
respectively. 𝜀0 and 𝜇0 are the permittivity and permeability of free
space, respectively. The system of equations consists of Maxwell’s
equations and equation of motion for electrons. The motion of
electrons is transformed to a current source and coupled

51
to Maxwell’s equations using (3.7). FDTD update equations are
obtained by discretizing (3.4)–(3.6). The discretization is carried out
on the modified Yee cell in Fig. 3.2 is collocated with for stable
coupling between Maxwell’s equations and the momentum equation.
[22], [23]. The CDS is used for spatial and temporal differential
operations. and 𝐽 are updated in half-integer time to be effectively
coupled to Maxwell’s equations.
Update equations for (3.4)-(3.5) are as shown below.
Fig. 3.2 Modified Yee-cell for EM-plasma coupled FDTD simulation.

52
For electric field intensities:
0.5 0.5
0.5, 0.5, 0.5, 0.5,1 0.5 0.5
0.5, , 0.5, , 0.5 , 0.5 0.5, , 0.50
0.5
0.5, ,0
( )
( )
n n
z zi j k i j kn n n n
x x y yi j k i j k i j k i j k
n
x i j k
H Ht
E E H H
tJ
(3.8)
0.5 0.5
, 0.5, 0.5 , 0.5, 0.51 0.5 0.5
, 0.5, , 0.5, 0.5, 0.5, 0.5, 0.5,0
0.5
, 0.5,0
( )
( )
n n
x xi j k i j kn n n n
y y z zi j k i j k i j k i j k
n
y i j k
H Ht
E E H H
tJ
(3.9)

53
0.5 0.5
0.5 , 0.5 0.5, , 0.51 0.5 0.5
, , 0.5 , , 0.5 , 0.5, 0.5 , 0.5, 0.50
0.5
, , 0.50
( )
( )
n n
y yi j k i j kn n n n
z z x xi j k i j k i j k i j k
n
z i j k
H Ht
E E H H
tJ
(3.10)
For magnetic field intensities:
, 0.5, 1 , 0.5,0.5 0.5
, 0.5, 0.5 , 0.5, 0.5 , 1, 0.5 , , 0.50
( )
( )
n n
y yi j k i j kn n n n
x x z zi j k i j k i j k i j k
E Et
H H E E
(3.11)
1 , 0.5 , , 0.50.5 0.5
0.5, , 0.5 0.5, , 0.5 0.5, , 1 0.5 ,0
( )
( )
n n
z zi j k i j kn n n n
y y x xi j k i j k i j k i j k
E Et
H H E E
(3.12)
0.5, 1, 0.5, ,0.5 0.5
0.5, 0.5, 0.5, 0.5, 1, 0.5, , 0.5,0
( )
( )
n n
x xi j k i j kn n n n
z z y yi j k i j k i j k i j k
E Et
H H E E
(3.13)

54
Update equation for (3.6) is derived using the Boris algorithm with
predictor-corrector step [17]. Brief descriptions for update equation
of (3.6) is as shown below.
In predictor step, vector field is approximated using semi-implicit
form shown below.
0.5 0.5 0.5 0.5
0.5 ( )2
n n n n
p pn nece
e
U U U UqU
t m (3.14)
where,
ec
e
q B
m (3.15)
Subscript ‘p’ means ‘predictor’. Then, two auxiliary vector fields can
be defined as shown below.
0.50.5
2 2
n nn ep
e
tq t UU U
m (3.16)
0.50.5
2 2
n nn e
e
tq t UU U
m (3.17)
Then the equation of motion is deformed to the equation as shown
below.

55
2c
U U U U
t (3.18)
Using vector identity, it can be derived that + is the rotated vector
of − with the rotation angle θ. The rotation angle θ is calculated
using (3.19) and its schematic is shown in Fig. 3.3.
1 1tan tan2 2
cU U t
U U
(3.19)
With auxiliary vector fields, the Boris algorithm can be applied to
find 𝑝𝑛+0.5. Detailed procedures are as shown in (3.20)-(3.21)
Fig. 3.3 Rotational relation between two auxiliary vector fields.
θ
θ/2c
U
U

56
0
1 0
2 1
2
U U t
U U U
U U s
U U U
(3.20)
where,
tan(θ / 2)c
c
t
(3.21)
sinθc
c
s
(3.22)
Then, 𝑝𝑛+0.5 is easily calculated using (3.23)
0.50.5
2 2
n nn ep
e
tq t UU U
m (3.23)
Next, in corrector step, two auxiliary vector fields are defined again
for 𝑐𝑛+0.5 as shown below.
0.5
0.5
2 2
nnpn e
c
e
t UtqU U
m (3.24)

57
0.5
0.5
2 2
nnpn e
e
t UtqU U
m
(3.25)
Subscript ‘c’ means ‘corrector’. Using the auxiliary vector fields
above, the Boris algorithm is applied to find 𝑐𝑛+0.5 as shown in (3.20)
and (3.23). Finally, 𝑛+0.5 is calculated using the equation below.
The flow chart of the simulation is shown in Fig. 3.4.
0.5 0.5
p0.5
2
n n
cnU U
U (3.26)
It is well known that the predictor-corrector method used in
discretization of (3.6) ensures second-order accuracy as same as
the conventional FDTD method. In addition, this predictor-corrector
method can be effectively used when the equations to be discretized
includes time- and spatial- derivatives together.

58
Fig. 3.4 Flow chart for FDTD simulation with the Boris algorithm.
Simulation Start
Initialization
Update E-field
N > Nmax?Yes Simulation
End
Update H-field
Update U-field based on the Boris algorithm
Calculation of current J using U-field
No
N=N+1

59
3.2.3 Boundary Conditions
The half-space plasma that is parallel to the xy-plane is a kind of
layered media and could be treated as a periodic structure. We can
assume that the periodic structure has periodicities P𝑥 and ∞ with
respect to the x-axis and y-axis, respectively, as shown in Fig.3.5.
When a plane wave impinges on the plasma normally with respect to
the z-axis, the field components at 𝑥 = Px and 𝑥 = 0 have a
relationship that is expressed in the phasor domain by
x
( 0, , ) ( P , , )x y z x y z (3.27)
can be an electric or magnetic field component. In this case, the
field components at each boundary can be updated using those on the
other side, as represented in Fig. 3.5. Boundaries in z-direction are
terminated with CPML to absorb reflected and transmitted waves on
both sides.

60
Fig. 3.5 Schematic periodic boundary condition for layered media.

61
3.3. Numerical Results
The grid and time interval used in numerical experiments are set
to be Δ = 75 𝜇𝑚 in all directions with Δt = 0.125 𝑝𝑠. The frequency of
the incident wave is 91 GHz. The plasma is assumed to be uniform
having the plasma frequency of 𝜔𝑝𝑒 = 3.14 × 1011 𝑟𝑎𝑑/𝑠 . Each
simulation is repeated for magnetic bias values ranging from 1.0 to
1.7 [T]. The electric field components are recorded at several
distances away from the source plane wave. The FDTD-calculated
Faraday rotation angle per unit distance 𝜃𝐹𝑅 for each magnetic field
value is then given by
1tan ( )y
xFR
E
E
d (3.28)
Simulation results for Faraday rotation are shown in Fig. 3.6 and
compared with the analytic solutions. The FDTD simulation results
are well matched to analytic solution. Traces of the electric field
vectors at different recording points are also illustrated in Fig 3.6 for
magnetic bias 𝐵0 = 1.7 [𝑇]. The initial plane of polarization of the
linearly polarized wave is along x-axis. Faraday rotation is due to
the difference of the phase velocities of the RH- and LH- CP wave
as mentioned above.

62
(a)
(b)
Fig. 3.6 Simulation results of Faraday rotation: (a) Faraday rotation
according to the change of magnetic field (b) Visualization of Faraday
rotation for 𝐵0 = 1.7 [𝑇].

63
3.4. Summary
The Faraday rotation is simulated using the FDTD method. The
Maxwell’s equation and the equation of motion of electrons are solved
simultaneously. To effectively solve the equation of motion using the
Yee’s scheme, Boris’ method and predictor-corrector method are
applied. The simulation results are compared with analytic solution
and are well matched to the analytic solution.

64
3.5. References
[1] A. V. Gurevich, “Nonlinear Effects in the Ionosphere,”
Phys.-Usp., vol. 50, 2007.,
[2] M. R. Bordikar, W.A. Scales, A. Samimi, P. A. Bernhardt, S.
Briczinski, and M. J. McCarrick, “First Observations of Minority
Ion (H+) Structuring in Stimulated Radiation During Second
Electron Gyro-Harmonic Heating Experiments,” Geophys. Res.
Lett., vol. 40, pp. 548–565, 2013.
[3] M. R. Bordikar, W. A. Scales, A. Mahmoudian, H. Kim, P. A.
Bernhardt, R. Redmon, A. Samimi, S. Brizcinski, and M. J.
McCarrick, “ Impact of Active Geomagnetic Conditions on
Stimulated Radiation During Ionospheric Second Electron Gyro-
Harmonic Heating,” J. Geophys. Res. Space Phys., vol. 119, no.
1, pp. 548–565, Jan. 2014.
[4] T. B. Leyser, “ Stimulated Electromagnetic Emission by
High-Frequency Electromagnetic Pumping of the Ionospheric
Plasma,” Space Sci. Rev., vol. 98, pp. 223–328, 2001.
[5] J. L. Young, “ A full finite difference time domain
implementation for radiwowave propagation in a plasma,” Radio
Sci.,
vol. 29, no. 6, pp. 1513–1522, Nov-Dec. 1994.
[6] J. L. Young, “Propagation in linear dispersive media: finite
difference time-domain methodologies,” IEEE Trans. Antennas
Propag., vol. 43, no. 4, pp. 422–426, April. 1995

65
[7] D. F. Kelly, and R. J. Luebbers, “Piecewise Linear Recursive
Convolution for Dispersive Media using FDTD,” IEEE Trans.
Antennas Propag., vol. 44, no. 6, pp. 792–797, June. 1996
[8] S. A. Cummer, “An Analysis of New and Existing FDTD
Methods for Isotropic Cold Plasma and a Method for Improving
Their Accuracy,” IEEE Trans. Antennas Propag., vol. 45, no. 3,
pp. 392–400, March. 1997
[9] J. H. Lee, and. K. Kalluri, “ Three-dimensional FDTD
simulation of electromagnetic wave transformation in a dynamic
inhomogeneous magnetized plasma,” IEEE Trans. Antennas
Propag., vol. 47, no. 7, pp. 1146–1151, July. 1999
[10] J. L. Young, and R. O. Nelson, “A summary and systematic
analysis of FDTD algorithms for linearly dispersive media,”
IEEE Antennas Propagation Magazine., vol. 43, no. 1, pp. 61–77,
Feb. 2001
[11] Wenyi Hu, and Steven A. Cummer, “An FDTD Model for Low
and High Altitude Lighting-Generated EM Fields,” IEEE Trans.
Antennas Propag., vol. 54, no. 5, pp. 1513–1522, May. 2006
[12] G. Cerri, F. Moglie, R. Montesi, P. Russo, and E. Vecchioni,
“ FDTD solution of the Maxwell-Boltzmann system for
electromagnetic wave propagation in a plasma,” IEEE Trans.
Antennas Propag., vol. 56, no. 8, pp. 2584–2588, Aug. 2008
[13] C. Tsironis, T. Samaras, and L. Vlahos, “Scattered-field
FDTD algorithm for hot anisotropic plasma with application to EC

66
heating,” IEEE Trans. Antennas Propag., vol. 56, no. 9, pp.
2988–2994, Sep. 2008.
[14] Y. Yu, J. Niu, and J. J. Simpson, “A 3-D global earth-
ionosphere FDTD model including an anisotropic magnetized
plasma ionosphere,” IEEE Trans. Antennas Propag., vol. 60, no.
7, pp. 3246–3256, July. 2012.
[15] F. F. Chen, Introduction to Plasma Physics and Controlled
Fusion.2nd ed. New York, NY, USA: Plenum Press, 1984.
[16] C. K. Birdsall and A. B. Langdon, Plasma Physics via
Computer Simulation. New York, NY, USA: Taylor & Francis
Group., 2005.
[17] A. Samimi and J. J. Simpson, “An Efficient 3-D FDTD Model
of Electromagnetic Wave Propagation in Magnetized Plasma,”
IEEE Trans. Antennas Propag., vol. 63, no. 1, pp. 269–279, Jan.
2015.

67
Chapter 4. FDTD Simulation of Three-Wave
Scattering Process in Time-Varying Cold Plasma
Sheath
4.1. Introduction
There are several interesting EM–plasma coupled phenomena,
including microwave breakdown under a high-power pulse and
communication blackout in re-entry vehicles [1]–[3]. In addition,
there are useful applications of EM–plasma coupled systems such as
microwave torches, tokamaks, and chemical vapor deposition in
semiconductor processes [4]–[6]. Actual experiments for various
plasma parameters are required to study EM–plasma coupled
systems in depth. However, data acquisition from actual experiments
for a large number of plasma parameters is inefficient in reality. An
alternative is numerical experiments, in which we mathematically
model a physical system and solve a mathematical problem using
computer simulation. This is an extremely cost efficient method of
obtaining data for a system. Among numerical techniques, the FDTD
method is the most widely used approach to solve EM–plasma
coupled systems because it is accurate and easy to implement and
parallelize [7]–[28]. In addition, the FDTD method has advantages
over numerous other numerical techniques when simulation includes

68
complex media or nonlinear phenomena [29]. Luebbers et al.
modeled isotropic plasma as a dispersive medium with complex
permittivity and solved Maxwell’s equations using the recursive
convolution technique [7]–[8]. Hunsberger et al. introduced
magnetized plasma as gyrotropic media [9]. Young proposed the
direct integration (DI) method and solved the equation of motion and
Maxwell’s equations together [10]–[11]. Samimi and Simpson
proposed an explicit FDTD scheme for magnetized plasma using the
Boris particle mover, which is widely used in the particle-in-cell
method [22]. Cannon and Honary solved an EM–plasma coupled
system by utilizing the five-moment plasma fluid model with
graphical processing unit acceleration [23]. However, most of the
abovementioned studies focused on time-invariant plasma and on the
techniques of dealing with the dispersive and gyrotropic
characteristics of plasma. There have been few studies on the
solution of the nonlinear EM–plasma coupled problem by employing
the FDTD method. In this paper, we study the three-wave scattering
process in time-varying cold plasma using the FDTD method as a
numerical experiment of a nonlinear EM–plasma coupled system. The
three-wave scattering process in plasma was originally proposed by
Nazarenko et al. as a method of mitigating communication blackout in
vehicles in the re-entry phase [30]. The method uses the nonlinear
interaction between the signal wave from a base station and the pump
wave from a vehicle. In the three-wave scattering process, an EM
wave is coupled to an electrostatic (ES) wave and generates

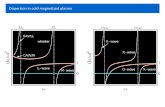
69
Langmuir oscillation by acting like a repeater. The three-wave
scattering process has not attracted significant interest owing to its
effectiveness because no linear coupling between longitudinal waves
was seen in real plasma profiles during reentry [31]. However, it is
worth investigating to perform simulations for various plasma
parameters because it shows single sided mixing phenomena
between monochromatic plane waves and it is physically an
extremely interesting EM–plasma coupled problem, even though it
cannot be a solution for blackout mitigation.

70
4.2. Model Description
4.2.1 Physical Model
The schematic for the simulation of the three-wave scattering
process is presented in Fig. 4.1. The plasma sheath is modeled as a
slab that is parallel to the xy-plane. We assume that the plasma is
electron-only cold plasma and there is no magnetic bias on it. Two
monochromatic plane waves are launched from each side of the slab.
A signal wave (𝑠𝑖𝑔) comes from the left side of the plasma and
impinges on the plasma slab at angle θ with respect to the negative
z-axis. A pump wave ( 𝑝𝑢𝑚𝑝) comes from the right side of the
plasma and impinges on the slab at angle 𝜓 with respect to the z-
axis. We assume that the frequency of the pump wave is considerably
higher than that of the signal wave. In the condition described above,
it is known that a scattered wave (𝑠𝑐𝑎𝑡) is generated by the nonlinear
interaction between the signal wave and pump wave at the location
of Langmuir oscillation. We assume that the location of Langmuir
oscillation is at 𝑧 = 𝑧𝐿𝑎𝑛𝑔𝑚𝑢𝑖𝑟, in which 𝑓𝑝(z) = 𝑓𝑠𝑖𝑔, where 𝑓𝑠𝑖𝑔 and 𝑓𝑝
are the frequencies of the signal wave and the plasma frequency of
the sheath, respectively.
The above mentioned three-wave scattering process is analogous to
the Raman scattering process in nonlinear optics. When electron
density increases linearly with respect to the z-axis, the scattered
wave is a Stokes wave, whose frequency corresponds to the

71
difference between the frequencies of the pump wave and signal
wave. Theoretically, the signal wave can propagate until 𝑧 = 𝑧1, in
which 𝑓𝑠𝑖𝑔 ∙ 𝑐𝑜𝑠𝜃 is equal to 𝑓𝑝(z); However, when the signal wave is
transverse electric to the y-axis, a part of EM wave energy is
converted to an ES wave and Langmuir oscillations are excited in the
plasma. The waves that are TM to the y-axis are not considered
here because it is well known that TM waves cannot be converted to
ES waves.
Fig. 4.1 Schematic of three-wave scattering process.

72
4.2.2 FDTD Update Equations
We assume that electron density 𝑁 is time variant and is sum of
time-invariant background electron density 𝑁0 and time-variant
perturbed electron density . Then, the behavior of electrons in
plasma can be analyzed using the system of equations below, within
Ο(ν/ω) [32].
0
HE
t (4.1)
0L NL
EH J J
t (4.2)
eLL
e
qUU E
t m (4.3)
21
2NL
L
UU
t (4.4)
( ) 0
NNU
t (4.5)
where 𝑎𝑛𝑑 are the velocity of electrons and electric current
density, respectively. They are related according to the equations
given below.
0L e L
J N q U (4.6)

73
0NL e NL e L
J N q U Nq U (4.7)
Subscripts ‘L’ and ‘NL’ denote ‘linear’ and ‘nonlinear,’
respectively. 𝑞𝑒 and 𝑚𝑒 are the charge quantity and mass of an
electron, respectively. 𝜀0 and 𝜇0 are the permittivity and
permeability of free space, respectively. The system of equations
consists of Maxwell’s equations, two equations of motion for the
linear and nonlinear velocities of electrons, and the continuity
equation. The motion of electrons is transformed to a current source
and coupled to Maxwell’s equations using (4.6) and (4.7). Nonlinear
current is due to the nonlinear response of background electrons and
Fig. 4.2 Modified Yee-cell for EM-plasma coupled FDTD simulation.

74
the nonlinear response of perturbed electron density. FDTD update
equations are obtained by discretizing (4.1)–(4.5). The discretization
is carried out on the conventional Yee cell. 𝐿 and 𝑁𝐿 are collocated
with for stable coupling between Maxwell’s equations and the
momentum equations of the electron [22], [23]. Electron density
related variables are located on all integer vertices of the Yee cell
and used with appropriate averaging. The CDS is used for spatial and
temporal differential operations. is updated in integer time. and 𝐽
are updated in half-integer time to be effectively coupled to
Maxwell’s equations. The discretization of (4.1)–(4.3) has been
provided in numerous previous studies, and we assume that the
readers are familiar with it. Thus, the discretization of (4.1)–(4.3) is
not described here. We only consider the discretization of (4.4) and
(4.5). Equations (4.4) and (4.5) are represented as the semi-
discretized equations given below by employing the CDS.
0.5 0.5
21( )
2
n n
NL NL n
L
U UU
t (4.8)
1 1
0.5
0.5 0.5
0 0
2
( )
n n n n
n
n n
N N N NU
t
N U U N (4.9)
where,

75
2 2 2
1, , , ,
2 2
, 1, , ,
2 2
, , 1 , ,
1ˆ( ) ( ) ( )
1ˆ ( ) ( )
1ˆ ( ) ( )
n nn
i j k i j k
n n
i j k i j k
n n
i j k i j k
U x U Ux
y U Uy
z U Uz
(4.10)
0.5 0.50.5
0.5, , 0.5, ,
0.5 0.5
, 0.5, , 0.5,
0.5 0.5
, , 0.5 , , 0.5
1( )
1( )
1( )
n nn
x xi j k i j k
n n
y yi j k i j k
n n
z zi j k i j k
U U Ux
U Uy
U Uz
(4.11)
0.5 0.5
0 00.5, , 0.5, , 1, , 1, ,0.5
0
0.5 0.5
0 0, 0.5, , 0.5, , 1, , 1,
0.5 0.5
0 0, , 0.5 , , 0.5 , , 1 , , 1
( )( )2 2
( )( )2 2
( )( )2 2
n n
x xi j k i j k i j k i j kn
n n
y yi j k i j k i j k i j k
n n
z zi j k i j k i j k i j k
U U N NU N
x
U U N N
y
U U N N
z
(4.12)
Velocity vector is the sum of 𝐿 and 𝑁𝐿 , and it is adequately
averaged in space and time. For example,

76
, 0.5, , 0.5,
, , , 0.5, , 0.5,
1
2
n n
Lx Lxi j k i j kn n n
x NLx NLxi j k i j k i j k
U U
U U U (4.13)
0.5 0.5
0.5 0.51
2
n n
Lx Lxposition positionn n n
x NLx NLxposition position position
U U
U U U (4.14)

77
4.2.3 Boundary Conditions
The plasma slab that is parallel to the xy-plane is a kind of layered
media and could be treated as a periodic structure. We can assume
that the periodic structure has periodicities P𝑥 and ∞ with respect
to the x-axis and y-axis, respectively, as shown in Fig. 4.2. When a
plane wave impinges on the layered media at angle θ with respect to
the z-axis, the field components at 𝑥 = P𝑥 and 𝑥 = 0 have a
relationship that is expressed in the phasor domain by [33]
x x x
( 0, , ) ( P , , )exp(j P )x y z x y z k (4.15)
where,
0
2 /Px x x
k k m (4.16)
0 0
sinx
k k (4.17)
𝑘0 is the free space wavenumber. 𝑘𝑥0 is the wavenumber of the
fundamental Floquet mode on the x-axis and 2𝑚𝜋/P𝑥 is that of
higher-order Floquet modes [34]. could be an electric or
magnetic field component. m is an integer. We assume the exp (jωt)
convention. The FDTD method requires the boundary conditions to
be represented in the time domain. Using the inverse Fourier
transform, (4.15) becomes

78
x 0( 0, , , ) ( P , , , P sin / )xx y z t x y z t c (4.18)
Equation (4.18) shows that the PBC requires future field components.
We can easily notice that the additional time delay or advance in (4.18)
results from the fundamental Floquet mode because the
wavenumbers of higher-order Floquet modes can be neglected by
multiplying periodicity P𝑥 with the argument of the exponential
function in (4.15). When a plane wave normally impinges on the
layered media, namely, θ = 0°, (4.18) becomes
x
( 0, , , ) ( P , , , )x y z t x y z t (4.19)
Fig. 4.3 Schematic periodic boundary condition for layered media.

79
In this case, the field components at each boundary can be updated
using those on the other side, as represented in Fig. 4.2. However,
when a plane wave obliquely impinges on the layered media,
techniques for ignoring time delay and advance are required [29],
[33]. In our simulation, two plane waves with different frequencies
and incident angles should be excited. Therefore, we modified the
geometry to excite two individual plane waves by utilizing the
modified sin–cos method [35]. The main idea is based on the fact that
the periodicity of layered media can be arbitrarily selected to make
the argument of the exponential function in (4.15) an integer multiple
of 2𝜋. For example, let us assume there exist two plane waves, P1
and P2, with a pair of parameters, (θ1, f1, Px1) and (θ2, f2, Px2),
respectively. θ and f are the incident angle and frequency of the plane
waves, respectively. P𝑥 is the periodicity of layered media. Subscript
in parameters denotes the number of each plane wave. Then, the
wavenumbers in the x-direction of the two plane waves along the x-
axis are
x1 01 1
1
2sin
x
mk k
P (4.20)
x2 02 2
2
2sin
x
nk k
P (4.21)
where 𝑘01 and 𝑘02 are the free space wavenumbers of each plane

80
wave. m and n are integers. The relationship for the field components
at each boundary can be expressed in the phasor domain as
1 1 x1 x1 x1( 0, , ) ( P , , )exp(j P )x y z x y z k (4.22)
2 2 x2 x2 x2( 0, , ) ( P , , )exp(j P )x y z x y z k (4.23)
The exponential term in (4.22) and (4.23) can be neglected by
selecting periodicity Px such that 𝑘𝑥1𝑃𝑥 and 𝑘𝑥2𝑃𝑥 become integer
multiples of 2𝜋. This implies that time delay or advance can also be
neglected for both plane waves when we excite two obliquely incident
plane waves with different frequencies. For example, we can use two
incident plane waves with pairs of (30°, 2 GHz, 0.3 m) and (0°, 12 GHz,
0.3 m) for simulation. It is physically evident for the scattered wave
that the 𝑘𝑥 of the source current of the wave is set by the values of
𝑘𝑥1 and 𝑘𝑥2 , and then, the boundary condition is automatically
satisfied. With the simple modification described above, the field
components at each periodic boundary can be easily updated like for
the normal incidence case. It can be difficult to make 𝑘𝑥1𝑃𝑥 and 𝑘𝑥2𝑃𝑥
exact integer multiples of 2𝜋 in a practical manner. Through
computer simulation, we found that a phase error of less than 3 ° is
acceptable for the proposed method and a phase error of 2.4 ° leads
to a difference of approximately 0.02 % in results. The smaller phase
error can be achieved through denser spatial sampling. This method
is highly efficient because the legacy code is reusable even though

81
computational burden increases when a large number of plane waves
with extreme incident angles must be supported.

82
4.3. Numerical Results and Discussion
It is critical to determine appropriate grid and time intervals before
performing the numerical simulations for accurate simulation results.
The conventional FDTD method generally recommend using a grid
interval of less than 𝜆/10, where 𝜆 denotes the wavelength of the
maximum frequency in the performed simulation. When the grid
interval is determined once, time interval is automatically determined
by the Courant–Friedrichs–Lewy number (CFLN) [29]. The CFLN of
the simulation is determined to be less than one to ensure the stability
of the FDTD simulation of Maxwell’s equations. The CFLN in free
space is defined as
c t NCFLN
x (4.24)
where 𝑐, 𝛥𝑡, 𝑁, and 𝛥𝑥 are the velocity of light in free space, time
interval, dimension of simulation, and grid interval, respectively. In
all numerical simulations presented in this section, the frequencies of
the signal wave and the pump wave are set to 2 GHz and 12 GHz,
respectively. It is well known from the three-wave scattering
process theory that the scattered field is a Stokes wave and is
expected to have a frequency of 10 GHz. As a result, it is reasonable
to determine the maximum frequency of the simulations be 15 GHz
with buffers in the frequency domain. The grid and time interval used

83
in all numerical experiments are set to be 𝛥 = 0.002 m in all
directions with a CFLN of 0.9. The grid interval corresponds to λ/10
of the maximum frequency determined in free-space. The limits
described above only ensure the stability of the FDTD method for
Maxwell’s equations. The stability analysis for the entire system of
equations, including the momentum equations of electrons, should be
presented and applied for simulations. However, the conventional
methods of checking the stability and numerical dispersion limits (e.g.,
complex frequency analysis and Von Neumann analysis) are not
applicable for the proposed nonlinear formulation and there is no
unified scheme for solving all nonlinear problems [36]. Therefore,
the stability limits for the numerical experiments are determined
based on a numerical convergence test. Details are described in
section 4.3

84
4.3.1 Linearly Increasing Electron Density Profile
In this section, we present the FDTD simulation results of the
three-wave scattering process for a linearly increasing density
profile as a validation example because the analytic estimation of the
three-wave scattering process for a linearly increasing electron
density profile (𝑁𝐿𝑖𝑛) has been extensively analyzed using complex
integration [32]. The initial electron density is expressed as
max 2(0 )
( , , )
0Lin
N z z z
N x y z
otherwise (4.25)
where 𝑁𝑚𝑎𝑥 is the maximum density of background electrons. We set
𝑁𝑚𝑎𝑥 to be 1.0 × 1018 m−3. The plasma slab has a thickness of 1 m
(z2 = 1). The signal wave and pump wave are excited using the total-
field scattered-field [29] technique in the air region and vehicle
region, which face each other as shown in Fig. 1, with incident angles
θand ψ, respectively. The computational domain has a size of 0.3 m,
0.004 m, and 1.2 m along the x-, y-, and z-axis, respectively. The
computational domain is terminated with the proposed PBC algorithm
in the x-direction, a perfect magnetic conductor in the y-direction,

85
and with the 10-cell thickness of the convolutional perfectly matched
layer (CPML) [37] in the z-direction. The reflected and transmitted
plane waves are absorbed in the CPML. The interactions between the
open boundaries of the plasma slab and the air are assumed to be
negligible therefore the contacts between the plasma slab and the air
are time invariant. The simulation result for the magnitude of the
magnetic field of the scattered wave is shown in Fig. 4.3. The FDTD
Fig. 4.4 Magnitude of magnetic field of scattered wave for linearly
increasing electron density profile.

86
simulation result is compared with the analytic estimation given in
[32]. As expected, the scattered wave has a frequency of 10 GHz and
the simulation result demonstrates good agreement with the analytic
estimation in terms of the frequency of the scattered field.

87
4.3.2 Case Study: Effects of Electron Density Profiles
and Incident Angles of Signal Wave
First, case studies are performed for different electron density
profiles, i.e., Bi-Gaussian (𝑁𝐵𝑖−𝐺.) and quadratic (𝑁𝑄𝑢𝑎𝑑) functions,
on the z-axis. Background electron density profiles are expressed
as
2
max
1
2
. max 2
2
exp (0 )
( , , ) exp ( )
0
cc
cBi G c
z zN z z
w
z zN x y z N z z z
w
otherwise
(4.26)
2
max 2(0 )
( , , )
0Quad
N z z z
N x y z
otherwise (4.27)

88
These profiles with the location of Langmuir oscillation are depicted
in Fig. 4.5. We set density parameters 𝑁𝑚𝑎𝑥, 𝑤1, 𝑤2, and 𝑧𝑐 to be
4.0 × 1017 m−3, 0.25, 0.5, and 0.5, respectively. It is evident that any
complex density profile along the z-axis can be solved by changing
the plasma parameters. The FDTD simulation results for different
electron density profiles are shown in Fig. 5, which presents the
magnitude of the magnetic field of the scattered wave in the
frequency domain. The strongest scattered wave occurs for Bi-
Fig. 4.5 Background electron density (𝑁0) profiles for case study.

89
Gaussian electron density because dominant source of the scattered
wave is perturbed electron density by the signal wave and its
interaction with the pump wave. It could be analytically estimated that
perturbed electron density is proportional to the slope of background
electron density at the location of Langmuir oscillation and the
simulation results are good agreement with the analytic estimation
[32].
The shape of Langmuir oscillation is presented in Fig. 6 by showing
Fig. 4.6 Magnitude of magnetic field of scattered wave for different
electron density profiles.

90
the magnitude of perturbed electron density. The figure shows that
magnitude of the scattered field is proportional to the magnitude of
the Langmuir oscillation. Second, additional simulations are
performed for different incident angles of the signal wave with the
linearly increasing electron density profile shown in Fig. 4.5.
Simulation results are presented in Fig. 4.8. The maximum scattered
wave occurs when 𝜃 = 30° and the result is well agree with the
analytical estimation. It is also known that the optimum angle of the
pump wave, i.e.ψ, is 0° as considered in our study.

91
Fig. 4.7 Magnitude of perturbed electron density for different
electron density profiles: (a) Linear, (b) Bi-Gaussian, (c) Quadratic

92
Fig.4.8 Magnitude of magnetic field of scattered wave for different
incident angles of signal wave.

93
4.3.3 Discussion
The FDTD simulation results of the three-wave scattering process
shows a certain disagreement with the theory in terms of magnitude,
even though the results show good agreement in terms of frequency.
The disagreement is expected to be due to the following reasons:
- Analytic estimation cannot include dynamically varying
electron density and simultaneous interactions between
waves. It only calculates the physical quantities in the steady
state.
- The magnitude of the scattered wave is 10−6– 10−7 times that
of the pump wave. Small errors could lead to a large
difference between analytic estimation and FDTD simulation
values.
The lack of stability and dispersion analysis for the proposed
algorithm is also a problem, and it should be solved. It is well known
that the stability of DI method based FDTD algorithm can be ensured
using the conventional CFLN when the following conditions are
satisfied [13], [16].
- The plasma is not magnetically biased.
- The nodes for ( 𝑜𝑟 𝐽) are collocated with and updated at
the same time as .

94
- Only the 1st order momentum equation, i.e., the equation of
motion, is considered for election.
In our method, the 0th order momentum equation, i.e., the charge
conservation equation, and the equation for nonlinear velocity are
considered with Maxwell’s equation. Thus, the conventional CFLN
cannot be the stability criterion. Instead, we performed convergence
tests for various CFLNs that are close to 1. The simulation results
are presented in Fig. 8. When the CFLN is almost 1 or higher, the
simulation diverges as expected. Thus, we determined the CFLN to
be 0.9 with a margin to overcome the unexpected source of instability
factors. The momentum equations for the fluid model used in this
study are only the 0th and 1st order equations with scattering
frequency between electrons and neutrals. However, the simulation
model could be extended by utilizing a higher-order momentum fluid
model and various scattering parameters. Electron energy and
temperature could be calculated by including the 2nd order momentum
equation of electrons. The generation and attachment processes of
electrons could be considered by including additional scattering
parameters.
These aspects remain as future works.

95
Fig. 4.9 Time record of magnetic field apart from the five Yee-cells
from the source point for different CFLNs.

96
4.3.4 Appendix: Source of the scattered wave
Source current of the scattered wave can be described as bellows
[32].
0 NL( )
NL e e LJ q N z U q NU (4.28)
It can be shown that the principal source of the scattered wave is the
interaction between electron density perturbed by the signal wave
and the velocity vector generated by the pump wave. Analytic
expression for the perturbed electron density is presented as bellows.
0
3
( )1
1 /e
N zieN H
i z xm (4.29)
It can be shown that the magnitude of the scattered wave is
proportional to the slope of the electron density at Langmuir
oscillation. To show the proportional relationship, we set ∂(𝑁0(𝑧)/𝜀)
∂z to
slope value. The slope parameter for the different electron density is
presented in Fig. 4. 10. It can be predicted from the Fig. 4. 10 that
that Bi-Gaussian electron density profile will generates the largest
scattered wave. The simulation results show good agreement with
the estimation above.

97
Fig. 4.10 The magnitude of slope value for different electron density
profiles.

98
4.4. Summary
An FDTD simulation method for the three-wave scattering process
is presented as a numerical experiment of the nonlinear interaction
between waves in time-varying cold plasma. The simulation result
for linearly increasing electron density shows good agreement with
analytic estimation in terms of frequency responses. Case studies
show that the three-wave scattering process is easily simulated
through the FDTD simulation for various electron density profiles and
incident angles of the signal wave, even though there is no analytic
solution of the scattering process. The incident angle of the signal
wave for the maximum Stokes wave is in good agreement with the
analytic estimation. As we used an extremely simple model of plasma,
a more extended model should be incorporated to be used in practical
problems by employing various collisional processes and higher-
order momentum equations. Moreover, additional studies will be
constructed in the future for numerical stability and dispersion limits
in detail.

99
4.5. References
[1] S. Yan, A. D. Greenwood, and J. –M. Jin, “Simulation of
high-power microwave air breakdown modeled by a coupled
Maxwell-Euler system with a non-Maxwellian EEDF,” IEEE
Trans. Antennas Propag., vol. 66, no. 4, pp. 1882–1893, April.
2018.
[2] J. P. Rybak and R. J. Churchill, “ Progress in reentry
communications,” IEEE Trans. Aerosp. Electron. Syst., vol.
AES-7, no. 5, pp. 879–894, Sep. 1971.
[3] J. P. Rybak, “Causes, effects and diagnostic measurements of
the reentry plasma sheath,” Air Force Cambridge Res. Lab., El
Segundo, CA, USA, Tech. Rep. AFCRL-70-0707, 1970.
[4] K. Kim, J. Park, S. Choi, J. Kim, and S. Hong, “Comparative
study of two- and three-dimensional modeling on arc discharge
phenomena inside a thermal plasma torch with hollow electrodes,
Phys. Plasma 15, 023501. 2008.
[5] F. F. Chen, Introduction to Plasma Physics and Controlled
Fusion.2nd ed. New York, NY, USA: Plenum Press, 1984.
[6] W. N. G. Hitchon, Plasma Processing for Semiconductor
Fabrication.1st ed. Cambridge, UK: Cambridge University Press,
1999.
[7] R. J. Luebbers, F. Hunsberger, and K. S. Kunz, “ A
frequency-dependent finite-difference time-domain formulation

100
for transient propagation in plasma,” IEEE Trans. Antennas
Propag., vol. 39, no. 1, pp. 29–34, Jan. 1991
[8] R. J. Luebbers, and F. Hunsberger, “FDTD for Nth-order
dispersive media,” IEEE Trans. Antennas Propag., vol. 40, no.
11, pp. 1297–1301, Nov. 1992
[9] F. Hunsberger , R. Luebbers, and K. Kunz, “Finite-difference
time-domain analysis of gyrotropic media-I: Magnetized Plasma,”
IEEE Trans. Antennas Propag., vol. 40, no. 12, pp. 1489–1495,
Dec. 1992
[10] J. L. Young, “ A full finite difference time domain
implementation for radiwowave propagation in a plasma,” Radio
Sci.,
vol. 29, no. 6, pp. 1513–1522, Nov-Dec. 1994.
[11] J. L. Young, “Propagation in linear dispersive media: finite
difference time-domain methodologies,” IEEE Trans. Antennas
Propag., vol. 43, no. 4, pp. 422–426, April. 1995
[12] D. F. Kelly, and R. J. Luebbers, “Piecewise linear recursive
convolution for dispersive media using FDTD,” IEEE Trans.
Antennas Propag., vol. 44, no. 6, pp. 792–797, June. 1996
[13] S. A. Cummer, “An analysis of new and existing FDTD
methods for isotropic cold plasma and a method for improving
their accuracy,” IEEE Trans. Antennas Propag., vol. 45, no. 3,
pp. 392–400, March. 1997
[14] J. H. Lee, and. K. Kalluri, “ Three-dimensional FDTD
simulation of electromagnetic wave transformation in a dynamic

101
inhomogeneous magnetized plasma,” IEEE Trans. Antennas
Propag., vol. 47, no. 7, pp. 1146–1151, July. 1999
[15] J. L. Young, and R. O. Nelson, “A summary and systematic
analysis of FDTD algorithms for linearly dispersive media,”
IEEE Antennas Propagation Magazine., vol. 43, no. 1, pp. 61–77,
Feb. 2001
[16] Wenyi Hu, and Steven A. Cummer, “An FDTD Model for Low
and High Altitude Lighting-Generated EM Fields,” IEEE Trans.
Antennas Propag., vol. 54, no. 5, pp. 1513–1522, May. 2006
[17] G. Cerri, F. Moglie, R. Montesi, P. Russo, and E. Vecchioni,
“ FDTD solution of the Maxwell-Boltzmann system for
electromagnetic wave propagation in a plasma,” IEEE Trans.
Antennas Propag., vol. 56, no. 8, pp. 2584–2588, Aug. 2008
[18] C. Tsironis, T. Samaras, and L. Vlahos, “Scattered-field
FDTD algorithm for hot anisotropic plasma with application to EC
heating,” IEEE Trans. Antennas Propag., vol. 56, no. 9, pp.
2988–2994, Sep. 2008.
[19] Y. Yu, J. Niu, and J. J. Simpson, “A 3-D global earth-
ionosphere FDTD model including an anisotropic magnetized
plasma ionosphere,” IEEE Trans. Antennas Propag., vol. 60, no.
7, pp. 3246–3256, July. 2012.
[20] A. A. Al-Jabr, M. A. Alsunaidi, T. Khee, and B. S. Ooi, “A
simple FDTD algorithm for simulating EM-wave propagation in
general dispersive anisotropic material,” IEEE Trans. Antennas
Propag., vol. 61, no. 3, pp. 1321–1326, Mar. 2013.

102
[21] M. Surkova, W. Terens, I. Pavlenko, D. V. Eester, G. V. Oost,
and D. D. Zutter, “3-D discrete dispersion relation, numerical
stability, and accuracy of the hybrid FDTD model for cold
magnetized toroidal plasma,” IEEE Trans. Antennas Propag., vol.
62, no. 12, pp. 6307–6316, Dec. 2014.
[22] A. Samimi and J. J. Simpson, “An efficient 3-D FDTD model
of electromagnetic wave propagation in magnetized plasma,”
IEEE Trans. Antennas Propag., vol. 96, no. 1, pp. 269–279, Jan.
2015.
[23] P. D. Cannon and F. Honary, “A GPU-accelerated finite-
difference time-domain scheme for electromagnetic wave
interaction with plasma,” IEEE Trans. Antennas Propag., vol. 96,
no. 7, pp. 3042–3054, July. 2015.
[24] W. Chen, L. Guo, J. Li, and S. Liu, “Research on the FDTD
method of electromagnetic wave scattering characteristic in
time-varying and spatially nonuniform plasma sheath,” IEEE
Trans. Plasma Sci., vol. 44, no. 12, pp. 3235–3242, Dec. 2016
[25] Y. Zhang, Y. Liu, and X. Li, “A 2-D FDTD model for analysis
of plane wave propagation through the reentry plasma sheath,”
IEEE Trans. Antennas Propag., vol. 65, no. 11, pp. 5940–5948,
Nov. 2017.
[26] X.-K. Wei, W. Shao, and X.-H. Wang “Hybrid Sub-Gridded
Time-Domain Method for Ground Penetrating Radar Simulations
Including Dispersive Materials,” IEEE Access, vol. 6, pp. 15777–
15786, 2018.

103
[27] W. Meng, and L. Qian “MedFDTD: A Parallel and Open-
Source Cross-Platform Framework for Bioelectromagnetics Field
Simulation,” IEEE Access, vol. 6, pp. 12940–12944, 2018.
[28] L. Zhang, L. Zhang, B. Wang, S. Liu, and C. Papavassilious
“Hybrid Prediction Method for the Electromagnetic Interference
Characteristics of Printed Cicuit Boards Based on the Equivalent
Dipole Model and the Finite-Difference Time Domain Method,”
IEEE Access, vol. 6, pp. 6520–6529, 2017.
[29] A. Taflove and S. C. Hagness, Computational
Electrodynamics.2nd ed. Norwood, MA, USA: Artech House,
2005.
[30] S. V. Nazarenko, A. C. Newell, and V. E. Zakharov,
“Communication through plasma sheaths via Raman (three-
wave) scattering process,” Phys. Plasma 1, Sep. 1994.
[31] R. A. Hartunian, G. E. Stewart, S. D. Fergason, T. J. Curtiss,
and R. W. Seibold, “Causes and Mitigation of Radio Frequency
(RF) Blackout During Reentry of Reusable Launch Vehicles,”
AEROSPACE REPORT NO. ATR-2007(5309) - 1, Contract No.
DTRT57-05-D-30103, Jan. 2007.
[32] A. O. Korotkevich, A. C. Newell, and V. E. Zakharov
“Communication through plasma sheath,” J. Appl. Phys., vol.
102, pp. 083305, 2007.
[33] F. Yang, J. Chen, R. Qiang, and A. Z. Elsherbeni, “A simple
and efficient FDTD/PBC algorithm for scattering analysis of
periodic structures,” Radio Sci., vol. 42, 2007, Art. ID RS4004.

104
[34] A. K. Bhattacharyya, Phased array antennas: Floquet
analysis, synthesis, BFNs, and active array systems. John
Wiley & Sons, Inc., Hoboken, NJ. 2006.
[35] Y. Lim, B. Seo, and S. Nam, “The least common multiple sin-
cos method for FDTD simulation of stratified media at oblique
incidences with different frequencies,” in Proc. IEEE USNC-
URSI Radio Science Meeting. (Joint with AP-S Symposium),
2018.
[36] J. –M. Jin, and S. Yan, “ Multiphysics Modeling in
Electromagnetics: Technical Challenges and Potential Solutions,”
IEEE Antennas Propagation Magazine., vol. 61, Issue: 2, pp. 14–
26, April. 2019.
[37] J. A. Roden, and S. D. Gedney, “Convolutional PML (CPML):
An efficient FDTD implementation of the CFS-PML for arbitrary
media,” Microw. Opt. Technol. Lett., vol. 27, pp. 334–339, Dec.
2000.

105
Chapter 5. Conclusions
In this thesis, a 3-D FDTD method is investigated to study the
EM-plasma coupled scattering analysis. The conventional Yee
method and fluid model of plasma are used to describe the EM-
plasma coupled system. The contents of the study carried out are as
follows.
First, in Chapter 1, basic theory and implementation of the FDTD
method for EM analysis are introduced. Implemented codes are
consist of update engine, source, and boundary condition modules. A
microstrip patch antenna, a low pass filter, and reflection coefficient
of the half-space dielectric are simulated with the developed FDTD
codes. Simulation results were well matched to the commercial
software and analytic solutions.
Second, in Chapter 2, plasma as fluids and its governing equations
are described. The moment equations are derived from the Boltzmann
equation by calculating the integrals in velocity space. The governing
equations are used as a part of EM-plasma coupled system of
equations in next chapters.
Third, in Chapter 3, electromagnetic wave propagation in
magnetized plasma is investigated and simulated using the developed
FDTD codes. The first momentum equation and the Maxwell’s
equations are solved simultaneously. Boris algorithm with predictor-
corrector method is applied to efficient calculation of the momentum
equation.

106
The calculation of Faraday rotation angle is selected as a validation
example and the simulation results shows good agreement to the
analytic solutions.
Finally, three-wave scattering process in inhomogeneous plasma
layer is analyzed and simulated using the FDTD codes. The zeroth
and the first momentum equations are included in the system of
equations with the Maxwell’s equations. The simulation result for
linearly increasing electron density shows good agreement with
analytic estimation in terms of frequency responses. Case studies are
then carried out for various electron density profiles and incident
angles of the signal wave. The incident angle of the signal wave for
the maximum Stokes wave is in good agreement with the analytic
estimation.
In conclusion, the developed FDTD method can be applied to
analysis of the EM-plasma problems. Also, the method is applicable
for more complicated EM-plasma coupled phenomena by increasing
order of the momentum equations and the number of species of
plasma.

107
초 록
본 논문에서는 3차원 유한차분 시간영역 (FDTD) 방법을 이용하여
전자파와 플라즈마가 상호 결합된 산란 해석에 관해 연구하였다.
플라즈마는 Boltzmann 방정식의 모멘텀 방정식들에 기반한 유체모델
플라즈마를 가정하였다. 모멘텀 방정식은 해석하고자 하는 문제에 따라
0차와 1차 모멘텀 방정식을 적절히 시뮬레이션 코드에 반영하였으며,
이온과 중성자는 배경에 멈춰있고 전자만 이동할 수 있는 저온
플라즈마를 가정하였다. 인가된 전자파에 의한 플라즈마 내의 전자는
전자기력을 받아 움직이고 이 때 발생한 전류는 Maxwell 방정식의
전류 전원으로 결합되어 전자파-플라즈마 시스템으로 결합된다. 수행된
연구의 내용은 아래와 같다.
첫 번째로, 전자파 해석을 위한 3-D FDTD 코드를 개발하였다.
코드는 필드 계산을 위한 엔진 모듈, 전자파 전원 입력을 위한 전원
모듈, 산란된 전자파의 흡수 및 계산 영역의 종단을 위한 흡수체
경계조건 모듈, 그리고 무한한 평판의 효과적인 해석을 위한 주기구조
경계조건 모듈로 이루어져 있다. 엔진 모듈은 Yee에 의해 제안된
고전적인 방법을 사용하였다. 전원 모듈은 회로 해석을 위한 집중
정수회로 전원과 평면파 발생을 위한 total-field / scattered-field
전원을 구현하였다. 흡수체 경계조건 모듈은 Berenger가 제안한
PML의 변형 중 하나인 Convolutional PML (CPML)을 구현하였다.
주기구조 경계조건은 기본적으로 단일주파수 해석을 위한 sin-cos
방법의 코드를 구현하였으나, 향후 플라즈마 내의 전자파 비선형 산란에
응용할 수 있도록 modified sin-cos 방법을 추가로 구현하였다. 개발된
3-D FDTD 코드는 평판형 안테나 및 필터 해석과 유전체 평면파의
유전체 반평면에 대한 반사계수 계산을 통해 정확성을 검증하였다.
안테나와 필터 해석은 상용 전자파 해석 프로그램인 CST MWS를
사용하여 검증하였고, 유전체 반평면에 대한 평면파의 산란은 해석해가

108
존재하므로 해석해를 이용하여 검증하였다. 그 결과, 구현된 FDTD
코드가 상용 프로그램 및 해석해 결과와 잘 일치하는 것을 확인하였다.
두 번째로, 균일한 전자농도를 갖는 플라즈마 평판에 정적인 자기장을
인가했을 때 플라즈마 평판을 투과하는 전자파의 거동을 해석하였다.
선형 편파를 갖는 평면파가 위와 같은 플라즈마 평판을 통과하는 경우
플라즈마 내에서는 좌측원형편파 (LHCP)와 우측원형편파 (RHCP)를
갖는 평면파로 나뉘어 전파된다. 이 때 LHCP와 RHCP 평면파가
플라즈마에서 전파하는 속도가 다르기 때문에 플라즈마의 두께 방향에
대해 Faraday rotation 현상을 관측할 수 있다. 플라즈마는 1차 모멘텀
방정식을 Yee의 방법을 이용하여 이산화하였고, 전자의 속도 변화와
이로 인한 플라즈마 전류는 Maxwell 방정식의 전류원으로 결합되어
하나의 FDTD 계산 시스템이 된다. 자기장이 인가된 경우 1차 모멘텀
방정식의 계산에 각 필드 컴포넌트가 연관되어 계산되어야 하는
불편함이 있는데 이것은 Boris 방법과 predictor-corrector 방법을
이용하여 극복하였다. 시뮬레이션 수행 결과 FDTD 방법을 이용하여
계산된 Faraday rotation 값과 이론값이 잘 일치하였고, 개발된 1차
모멘텀 방정식의 FDTD 계산이 정확함을 확인하였다.
세 번째로, 개발된 FDTD 프로그램을 이용하여 수직 방향으로
선형적인 농도 기울기를 갖는 평판형 플라즈마의 양쪽에서 주파수가
다른 평면파가 각각 입사할 때, 발생하는 비선형 산란 해석에 대한
연구를 수행하였다. 전자농도가 증가하는 방향으로 비스듬히 입사하는
평면파를 signal wave라고 하고 반대방향에서 입사하는 평면파를 pump
wave라고 할 때 signal wave는 플라즈마 평판의 최대 플라즈마
주파수보다 낮은 주파수를 가지며, pump wave는 플라즈마 평판의 최대
플라즈마 주파수보다 매우 높은 주파수를 갖는다고 가정하였다. 이러한
상황에서 signal wave는 플라즈마 평판을 투과할 수 없고, 오직 pump
wave만이 플라즈마 평판을 투과할 수 있다. 플라즈마 평판 내에 signal
wave와 같은 주파수의 플라즈마 주파수를 갖는 영역이 있다면 이
영역에서 강력한 Langmuir 진동이 발생하고 pump wave와 Langmuir

109
진동과의 상호작용에 의해 산란파는 signal wave와 pump wave의 차에
해당하는 주파수를 갖는 평면파이며 이러한 현상은 광학에서의 라만
산란과 유사하다. 이러한 현상을 해석하기 위해 0차, 1차 모멘텀
방정식에 Yee의 방법을 이용하여 이산화했고, 전자의 농도 변화, 속도
변화, 그리고 이에 의한 플라즈마 전류를 Maxwell 방정식의 전류원으로
결합하여 하나의 시스템을 만들고 FDTD 계산을 수행하였다.
시뮬레이션 수행 결과 기존 연구에서 이론적으로 계산된 결과와 FDTD
시뮬레이션 결과가 잘 일치하였고, 개발된 0차, 1차 모멘텀 방정식의
FDTD 계산이 정확함을 확인하였다. 추가적인 사례연구로서,
플라즈마의 전자농도 분포와 signal wave의 입사각을 변화시켜가며
시뮬레이션을 수행하였고 수행된 결과가 기존 이론의 연구 결과를 잘
반영함을 확인하였다.
결론적으로, 본 논문에서는 유체기반 플라즈마 모델에 대해 EM과
플라즈마가 상호 결합된 문제 해석을 위한 FDTD 기법을 제안하였고,
이를 이용하여 선형, 비선형 플라즈마 산란 해석을 수행하여 개발된
해석 기법의 정확성을 검증하였다.
주요어: 유한차분 시간영역법, 플라즈마 물리학, 비선형 산란, 다중물리
해석
학 번: 2012-20851

110
감사의 글
서울대학교 전파공학연구실의 구성원으로 받아 주시고, 학위과정을
지도해주신 남상욱 교수님께 가장 먼저 감사의 인사를 전합니다.
교수님의 지도를 통해 전파 관련 전공 지식과 공학 문제 해결 방법론에
대해 깊게 배울 수 있었습니다. 한 분야의 최고 권위자임에도 불구하고
항상 열심히 공부하시는 모습은 저를 포함한 연구실의 모든 학생들에게
귀감이 되었으며 사회에 나가서도 잊지 않고 그 모습을 본받아
살아가겠습니다.
바쁘신 와중에도 시간을 내어 학위논문을 지도해 주신 서광석 교수님,
오정석 교수님, 고일석 교수님, 그리고 정경영 교수님께도 감사의
인사를 드립니다. 교수님들의 세심한 논문지도 덕분에 학위과정을 잘
마무리 할 수 있었습니다.
석사과정 시절부터 전자기학, 수치해석, 그리고 전자파 영상화까지
학위 과정에서 필요했던 많은 전공 지식들을 아낌없이 열정적으로
가르쳐 주신 KIST의 김세윤 박사님과 프로그래밍 방법론 및 다양한
코딩 기술을 가르쳐 주신 김상욱 박사님 감사합니다.
입학부터 졸업까지 인연을 맺은 서울대학교 전파공학연구실의 모든
선후배 분들께도 깊은 감사를 드립니다. 연구실 생활에서 만난 모든
선후배들은 제 인생에서 만날 수 있는 가장 똑똑하고 열정적인
사람들이었습니다. 사회에서도 좋은 인연으로 만날 수 있기를 바랍니다.
아들의 학위과정을 오랜 기간 온 마음을 다 해 응원해주신 아버지,
어머니와 언제나 따뜻한 조언을 아끼지 않은 이공계 선배 연구자인
누나에게 감사합니다. 또한 여러 면에서 부족한 학생 사위를 따뜻하게
맞아 주시고 부담 없이 공부할 수 있도록 응원해주신 장모님께도 감사의

111
말씀을 드립니다.
마지막으로, 대학생 시절부터 오랜 시간 가장 가까이에서 저를
응원해주고, 학위과정의 모든 고단함을 위로해준 사랑하는 나의 아내
박서리와 졸업하는 해에 만난 귀여운 나의 딸 임재이에게 진심으로
고맙고 사랑한다는 말을 전합니다. 박서리와 임재이는 고단한
학위과정의 마무리에 박차를 가할 수 있도록 하는 모든 힘의
원천이었습니다.
다시 한 번 학위과정을 응원해준 모든 분들께 감사 드립니다.
2019년 8월
임영준