Dinamika Na Sistemi i Analiticka Mehanika
33
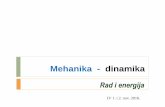
1 5. Dinamika na materijalni sistemi Mno`estvo od materijalni to~ki i tela ~ija {to polo`ba i dvi`ewe se me|usebno zavisni pretstavuva materijalen sistem. Diskreten materijalen sistem se narekuva sistem od kone~en broj na to~ki so nepromenlivo rastojanie me|u to~kite. Del od prostorot ispolnet so kontinuirano raspredeleni masi vo prostorot pretstavuva materijalno telo. Materijalen sistem pretstavuva mno`estvo od materijalni tela koi ne se vo direkten kontakt. Silite koi deluvaat na eden materijalen sistem gi klasificirame na: - nadvore{ni; - vnatre{ni. Nadvore{ni sili se narekuvaat silite koi ne pripa|aat na materijalniot sistem, a dejstvuvaat vrz nego. Vnatre{ni sili se narekuvaat silite koi dejstvuvaat me|u masite, od razgleduvaniot materijalen sistem Vnatre{nite sili na eden materijalen sistem gi imaat slednive osobini: 0 1 = ∑ = n i iv F - vektorskiot zbir na site vnatre{ni sili e ednakov na nula. 0 1 0 = ∑ = n i F iv M - vektorskiot zbir od momentite na site vnatre{ni sili vo odnos na proizvolno izbran pol e ednakov na nula. ( ) iv v i F F − = +1 = V F F r M V 12 1 0 , 12 = V F F r M V 21 2 0 , 21 V V F F 12 21 − = − = + = ∑ V V F F F F r F r M M M V V V 21 2 12 1 0 0 0 , , 21 12 0 , , 12 1 2 12 2 1 = = − = ∑ V V F M M F r r M m i F iv M i M i+1 m i+1 F (i+1)v F 21 v M 2 M 1 F 12 v r 1 r 2 O
description
Dinamika Na Sistemi i Analiticka Mehanika
Transcript of Dinamika Na Sistemi i Analiticka Mehanika

1
5. Dinamika na materijalni sistemi
Mno`estvo od materijalni to~ki i tela ~ija {to polo`ba i dvi`ewe se me|usebno zavisni pretstavuva materijalen sistem.
Diskreten materijalen sistem se narekuva sistem od kone~en broj na to~ki so nepromenlivo rastojanie me|u to~kite.
Del od prostorot ispolnet so kontinuirano raspredeleni masi vo prostorot pretstavuva materijalno telo.
Materijalen sistem pretstavuva mno`estvo od materijalni tela koi ne se vo direkten kontakt.
Silite koi deluvaat na eden materijalen sistem gi klasificirame na: - nadvore{ni; - vnatre{ni. Nadvore{ni sili se narekuvaat silite koi ne pripa|aat na materijalniot
sistem, a dejstvuvaat vrz nego. Vnatre{ni sili se narekuvaat silite koi dejstvuvaat me|u masite, od
razgleduvaniot materijalen sistem Vnatre{nite sili na eden materijalen sistem gi imaat slednive osobini:
01
=∑=
n
iivF - vektorskiot zbir na site vnatre{ni sili e ednakov na nula.
01
0 =∑=
n
i
FivM - vektorskiot zbir od momentite na site vnatre{ni sili vo odnos
na proizvolno izbran pol e ednakov na nula.
( ) ivvi FF −=+1
= VF FrM
V
1210 ,12
= VF FrM
V
2120 ,21 VV FF 1221 −=
−
=+=∑ VVFFF FrFrMMM
VVV
212121000 ,,2112
0,, 12121221 =
=
−=∑ VV FMMFrrM
mi
Fiv
Mi
Mi+1mi+1
F(i+1)v
F21v
M2
M1F12
v
r1
r2 O

2
m1
y
z
r1
x
F1v
F1n
a1
m2F2
n
a2
r2
mi
Fin
ai ri
mn
Fnn
an
rno
F2v
Fiv
Fnv
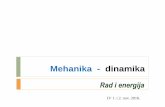
5.1. Diferencijalni ravenki na dvi`ewe na materijalni sistemi
Na edna to~ka na materijalen sistem dejstvuva nadvore{na sila iF
.
m – broj na vnatre{ni sili
Ako se postavi ravenkata za site to~ki na materijalniot sistem se dobiva:
bidejki suma od site vnatre{ni sili e 0 sledi:
Ravenkata (5.2) proektirana na koordinatnite oski:
( )1.51
............. ii
n
iivi amFF
⋅=+∑=
∑∑∑∑== ==
⋅=+n
iii
n
i
m
iiv
n
ii amFF
11 11
( )2.5
0
11
1 1
.......................... ∑∑
∑∑
==
= =
⋅=
=
n
iii
n
ii
n
i
m
iiv
amF
F
( )3.5
11
11
11
⋅=
⋅=
⋅=
∑∑
∑∑
∑∑
==
==
==
n
iii
n
ii
n
iii
n
ii
n
iii
n
ii
zmZ
ymY
xmX

3
Ako ravenstvoto (5.1) go pomno`ime vektorski so ir
vo odnos na to~kata 0 se dobiva:
bidejki momentot od vnatre{nite sili e ednakov na nula, se dobiva:
Dokolku se proektira ravenkata (5.4) na koordinatnite oski, se dobiva:
5.2. Op{ti zakoni na dinamikata na materijalni sitemi
1. Zakon za dvi`ewe na centarot na inercija (sredi{te) na materijalniot
sistem. 2. Zakon za koli~estvo na dvi`ewe na materijalniot sistem. 3. Zakon za momentot na koli~estvo na dvi`ewe na materijalniot sistem. 4. Zakon za kineti~ka energija na materijalniot sistem.
[ ] [ ] [ ]
[ ]iii
m
i
Fi
iii
m
iiviii
amrMM
amrFrFr
i
⋅=+
⋅=+
∑
∑
=
=
,
,,,
100
1
[ ] ( )4.5,
0
110
1 10
.................. ∑∑
∑∑
==
= =
⋅=
=
n
iiii
n
ii
n
i
m
i
F
amrM
M i
( )
( )
( )∑∑
∑∑
∑∑
⋅−⋅=
⋅−⋅=
⋅−⋅=
=
=
=
iiiii
n
iiz
iiiii
n
iiy
iiiii
n
iix
xyyxmM
zxxzmM
yzzymM
1
1
1

4
x
y
z
ri
ri+1
mi
mi+1ρ C
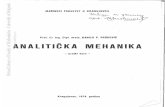
5.2.1. Masa na sistemot. Centar na masa ili sredi{te na materijalen sistem. Zakon za dvi`ewe na sredi{teto na materijalen sistem
Materijalen sistem so n – materijalni to~ki.
Masata na celiot sistem }e bide:
Dokolku ravenkata (5.5) se proektira na koordinatnite oski se dobiva:
∑
∑
∑
∑
∑
∑
=
=
=
=
=
=
⋅=
⋅=
⋅= n
ii
n
iii
cn
ii
n
iii
cn
ii
n
iii
c
m
zmz
m
ymy
m
xmx
1
1
1
1
1
1 ; ;
bidejki: Mmn
ii =∑
=1
Ravenkata (5.5) mo`e da se zapi{e vo sledniot oblik:
( )6.51
................................ ∑=
⋅=⋅n
iiic rmrM
Dokolku posledniot izraz (5.6) dvapati go diferencirame po vremeto se dobiva:
∑=
⋅=⋅n
iiic rmrM
1
nmmm ...................., 21
( )nimMn
ii ..........2,1
1== ∑
=
( )5.5
1
1 .......................
∑
∑
=
=
⋅== n
ii
n
iii
c
m
rmr
ρ

5
dokolku se ima vo predvid deka: ∑∑==
=⋅n
ii
n
iii Frm
11
sledi:
( )7.51
.................................... ∑=
=⋅n
iic FrM
Rc Fam =⋅ - zakon za dvi`ewe na sredi{teto na masite na eden materijalen sistem.
Dokolku ravenkata (5.7) se proektira na koordinatnite oski se dobiva:
∑∑∑===
=⋅=⋅=⋅n
iic
n
iic
n
iic ZzMYyMXxM
111
; ;
Toa se diferencijalni ravenki za dvi`ewe na sredi{teto na sistemot. 5.2.2. Zakon za koli~estvo na dvi`ewe na materijalen sistem Koli~estvoto na dvi`ewe na edna materijalna to~ka e definirano so:
iii Vmk ⋅=
Koli~estvoto na dvi`ewe na sistem od materijalni to~ki e :
∑∑==
⋅==n
iii
n
ii VmkK
11
Koli~estvoto na dvi`ewe na materijalniot sistem e ramno na proizvodot na
masata na sistemot i brzinata na sredi{teto na sistemot.
( )8.5.................................................... cVMK
⋅= Dokolku ravenstvoto (5.8) se proektira na koordinatnite oski se dobiva:
…………………………. ...(5.10)
cz
cy
cx
zMKyMKxMK
⋅=
⋅=⋅=

6
Primer: Edna lokomotiva treba da se prika~i za vagon, i za taa cel taa na vagonot, koj miruva, mu se pribli`uva so brzina V. Da se opredeli brzinata V1, so koja tie }e prodol`at da se dvi`at zaedno po spojuvaweto, ako se znae deka te`inata na lokomotivata e GL, a na vagonot GV.
5.2.3. Zakon za momentot na koli~estvo na dvi`ewe na materijalen sistem
Za edna materijalna to~ka va`e{e:
Za sistem od n materijalni to~ki }e bide:
kade {to:
- masa na i –tata to~ka; - brzina na i –tata to~ka; - vektor na polo`ba na i –tata to~ka.
Dokolku vektorskata ravenka (5.11) se proektira na koordinatnite oski se dobiva:

7
Mi
y
z
ri
Vi
x
rA
ρ
η
ζ
ξ
ρc
cVA
Vir
o
o1
Dokolku ravenkata (5.11) ja diferencirame po vremeto se dobiva:
odnosno: Izvodot na momentot na koli~estvo na dvi`ewe na materijalniot sistem po
vremeto e ramen na vektorskiot zbir na momentite na site nadvore{ni sili vo odnos na istata to~ka 0.
5.2.4. Zakon za kineti~ka energija na materijalen sistem
∑∑==
==n
iii
n
ikik VmEE
1
2
1 21
iV - apsolutna brzina na to~kite;
irV - relativna brzina.
Koordinatniot sistem ζηξ se dvi`i translatorno so brzina AV .
( ) ∑∑==
++==n
iiricrAA
n
ikik VmVVmmVEE
1
22
1 21,
21
Neka podvi`niot koordinaten sistem e postaven vo sredi{teto na masite (vo to~kata C).
CA = CA VV = 00 == crC Vρ
22
21
21
irick VmmVE +=
[ ] [ ] [ ]
[ ]
∑
∑
∑
=
=
⋅⋅+⋅=
=
=
iFii
n
iii
i
iiiiii
n
iiii
i
ML
FrdtLd
VmramrVmrdtLd
00
1
0
1
0
,
,,,,
0
- kolinearni vektori ir i iV

8
- Keningova teorema za poednostavno opredeluvawe na kineti~kata energija, glasi:
Kineti~kata energija na materijalniot sistem se dobiva kako algebarski zbir na kineti~kata energija na sredi{teto od masite vo koe e skoncentrirana vkupnata masa na sistemot, i kineti~kata energija od relativnoto dvi`ewe vo odnos na podvi`niot koordinaten sistem koj se dvi`i translatorno vo odnos na nepodvi`niot.
Primer:
Zada~ata }e ja re{ime so pomo{ na zakonot:
Da se opredeli diferencijalnata ravenka na dvi`ewe na tovarot A od dadeniot materijalen sistem. Sistemot se sostoi od tovar so te`ina G koj e obesen na ja`e ~ij drug kraj, prefrlen preku makara so te`ina 2G i radius R, e pricvrsten za pru`ina so krutost c. Ja`eto e nerasteglivo.
Kineti~kata energija na sistemot }e bide zbir od kineti~kata energija na teloto A i kineti~kata energija na makarata:
Vrskata pome|u lakot na zavrtuvawe na makarata i pomestuvaweto x }e bide:
Kone~no za se dobiva:
Vkupnata kineti~ka energija na sistemot }e bide:
Rabota }e imame od te`inite koi ja menuvaat visinata i od pru`inata. Bidej}i makarata ne ja menuva visinata, nejzinata te`ina ne pravi rabota. Taka }e imame:

9
y
z
ri
x
xi
yi
zi
hiz
hiy
hixO
2
2xcxGA ⋅+⋅=
Dokolku sega se vratime vo po~etnata ravenka, se dobiva:
⋅+⋅=
⋅2
22 xcxGdtd
gxG
dtd
Po diferenciraweto dobivame:
22
2/2
:/222
gxGgcx
GgGxcx
gG
xxxcxGxg
xG
=⋅⋅⋅
−
⋅=⋅−⋅
⋅+⋅=⋅⋅
Poslednoto ravenstvo ja dave diferencijalnata ravenka na dvi`ewe na teloto A. 6. Materijalni momenti na inercija
Pod materijalen moment na inercija na kruto telo vo odnos na nekoja oska, odnosno pol, se podrazbira zbirot na proizvodite od masite na site to~ki od teloto i kvadratot od nivnoto rastojanie do taa oska, odnosno pol.
Materijalnite momenti na inercija
go karakteriziraat rasporedot na masite vo sistemot.
Moment na inercija vo odnos na
nepodvi`en pol se narekuva polaren, vo odnos na oska se narekuva aksijalen, a vo odnos na ramnina se narekuva planaren
( )∑∑==
++⋅==n
iiii
n
iii zyxmrmJ
1
222
1
20
. 6.1 Polaren moment na inercija

10
6.2 Aksijalni momenti na inercija
( )
( )
( )∑∑
∑∑
∑∑
==
==
==
+==
+==
+==
n
iiii
n
iiziz
n
iiii
n
iiyiy
n
iiii
n
iixix
yxmhmJ
zxmhmJ
zymhmJ
1
22
1
2
1
22
1
2
1
22
1
2
Kaj homogenite tela rasporedot na masite e neprekinat, pa imame:
dVdm ⋅= ρ Kade {to: ρ e gustina ; dV e elementaren volumen
( )
( )
( )∫
∫
∫
+=
+=
+=
Vz
Vy
Vx
dVyxJ
dVzxJ
dVzyJ
22
22
22
ρ
ρ
ρ
6.3 Planarni momenti na inercija
∑=
=n
ii hmJ
1
2ππ
∑
∑
∑
=
=
=
=
=
=
n
iiiyoz
n
iiixoz
n
iiixoy
xmJ
ymJ
zmJ
1
2
1
2
1
2
6.4 Vrska pome|u polarniot i aksijalnite moment na inercija
( ) ( ) ( )
zyx
n
iiii
n
iiii
n
iiii
JJJJ
yxmzxmzymJ
++=
+++++= ∑∑∑===
0
1
22
1
22
1
220
2
2

11
y
z
x
xi
yi
zi
rzi
C
Mi
z1
rz1i
d
6.5 Vrska pome|u polarniot i planarnite moment na inercija yozxozxoy JJJJ ++=0
6.6 Vrska pome|u aksijalnite i planarnite moment na inercija
xozyozz
yozxoyy
xozxoyx
JJJJJJJJJ
+=
+=
+=
6.7 Materijalen moment na inercija za paralelni oski
Razgleduvame homogeno kruto telo, pri toa referentniot koordinaten
sistem e postaven vo te`i{teto. Oskata 1z e paralelna so oskata z na rastojanie d od nea.
( )
( )[ ] ( )2
1
1
2
11
22
1
22
1
211
1
22
1
2
2
mdJJ
mdmdyyxmdyxmrmJ
yxmrmJ
zz
n
ii
n
iii
n
iiii
n
iiii
n
iiziz
n
iiii
n
iziiz
+=
+−+=−+==
+==
∑∑∑∑∑
∑∑
=====
==
021
=∑=
n
iii mdy - bidej}i minuva niz sredi{teto na teloto (t.e. se sovpa|a so
koordinatniot po~etok).
21 mdJJ zz +=
Hajgens-[ tajnerova teorema
Momentot na inercija vo odnos na nekoja oska e ednakov na zbirot od momentot na inercija za paralelna oska koja minuva niz sredi{teto i proizvodot od vkupnata masa na teloto i kvadratot na rastojanieto me|u dvete oski.
0

12
z1z
R
7. Dimanika na kruto telo
Primer:
translatorno dvi`ewe krivoliniska translacija rotacija okolu nepodvi`na oska komplano dvi`ewe
23
2
2
2
1
22
1
2
21
RMJ
RMRMJ
RMJ
RMJJ
z
z
z
zz
⋅⋅=
⋅+⋅
=
⋅=
⋅+=

13
M1
y
z
x
F1n
dr1
o
V1
M2
F2n
dr2V2
C
FRn
drc Vc
7.1. Translatorno dvi`ewe
∑=
=⋅
=⋅n
iic
Rc
Fam
Frm
1
Proektirano na koordinatnite oski:
rdrdrdrdrd ic ==== 21
nF1 - rezultanta na sili koi ja napa|aat to~ka 1.
= rdFA n
ii ,δ
=
== ∑∑∑
===
n
i
ni
n
i
ni
n
ii rdFrdFAA
111,,δδ
= rdFA n
R ,δ
Pri translacija rabotata na nadvore{nite sili se dobiva kako rabota od
rezultantnata sila vo bilo koja to~ka od teloto.
∫
=
II
I
nR rdFA ,
I.II - po~etna i krajna polo`ba pri translatornoto dvi`ewe.
∑
∑
∑
=
=
=
=⋅=⋅
=⋅=⋅
=⋅=⋅
n
izzc
n
iyyc
n
ixxc
Famzm
Famym
Famxm
1
1
1
2
2c
kVME ⋅
=

14
x
y
z
rdm
O dφ
Fi
V
FR
F1 F2
N
7.2. Rotacija na telo okolu nepodvi`na oska
- brzina na N koli~estvo na dvi`ewe na taa materijalna to~ka. Momentot na koli~estvo na dvi`ewe e: Za celoto telo toa }e bide:
Izvodot od momentot na koli~estvo na dvi`ewe po vremeto t e ednakov na algebarskiot zbir od momentite na dejstvuva~kite sili vo odnos na istata oska:
- diferencijalna ravenka za rotacija na telo okolu nepodvi`na oska -kineti~ka energija
ω⋅= rV
dmrdmVdK z ⋅⋅=⋅= ω
dmrrdKdL zz ⋅⋅=⋅= ω2
∫
∫∫=
⋅=⋅=⋅=
Mz
zM
zM
z
dmrJ
JJdmrL
2
2 ωωωω
∑
∑
=⋅
⋅=⋅=
==
izz
zzz
n
iizz
MJ
JJL
ML
ϕ
ϕω
1
2
2ϕ⋅= z
kJE

15
n
iF - rezultanta od site nadvore{ni sili, koja ako se razlo`i po oskite na prirodniot triedar, se dobiva:
nin
nit
nib
ni FFFF ++=
( ) ϕδ drFdsFdsFA iititiiti === , n
i
i
FZiit MrF =⋅
ϕδ dMAn
i
i
FZi =
ϕϕδδ MzddMzAAn
ii
n
ii === ∑∑
== 11
iMz - rezultanten moment od dejstvuva~kite sili vo odnos na oskata na rotacija.
( )∫=2
1
1.7ϕ
ϕ
ϕ MzdA
Rabotata se opredeluva so izrazot (7.1) samo ako momentot Mz e funkcija od ϕ , na ako e funkcija od ω ili t , mora da bide poznat zakonot na dvi`ewe. Vo slu~aj na konstanten moment: ( )1212 ϕϕϕϕ −=−= MzMzMzA 7.3. Komplano dvi`ewe na kruto telo
Rotacija + Translacija vo ramnina.
-zbir na silite po h-oska
-zbir na silite po y - oska -zbir na stati~kite momenti od site sili vo odnos na te`i{teto S
Dinami~ki ravenki na komplano dvi`ewe na kruto telo
∑∑
∑∑
∑∑
=⋅
=⋅
=⋅
ic
icc
ii
iic
ii
iic
MMJ
YYym
XXxm
ϕ
odφ
Fitn
FinnFib
n Fin
ri
ds
T
N
B
ω

16
R VC
φ
PV
C
x
y
o
C
η
ζ
Mcξ
F1n
F2n
Fin
Fnn
Kineti~kata energija kaj komplanoto dvi`ewe se presmetuva spored ravenstvoto (Keningova teorema):
22
21
21 ω⋅+⋅= cck JVmE
Silite se reduciraat vo te`i{teto C i se dobiva rezultanten vektor i
moment vo odnos na oskata ξc .
Rabota pri komplano dvi`ewe = rabota pri translacija + rabota pri rotacija
ϕδ ζ dMcrdFA cn
R +
= ,
∫∫ +
=
2
1
2
1
,ϕ
ϕ
ϕζ
dMrdFAn
RFc
C
Cc
nR - rabota pri komplano dvi`ewe.
Primer:
ϕω
ϕ
⋅=⋅=
⋅=
⋅+
⋅=
RRV
RMJ
JVME
c
cck
2
222
22
43
4222
2
2222
22
2ccc
c
ck
VMVMVMRVRM
VME
⋅⋅=
⋅+
⋅=
+⋅
+⋅
=

17
8.Analiti~ka mehanika 8.1. Vistinski i virtuelni pomestuvawa
Vistinsko pomestuvawe e ona beskrajno malo pomestuvawe na nekoja to~ka
od materijalniot sistem koe ja zadovoluva diferencijalnata ravenka na
dvi`eweto. Go bele`ime so a nastanuva pod dejstvo na silite koi deluvaat na sistemot i se menuva vo tek na vremeto.
Virtuelni pomestuvawa se zamisleni beskone~no mali pomestuvawa koi gi
ovozmo`uvaat vrskite vo daden moment. Tie se obele`uvaat so i imaat samo geometriski odnosno kinematski karakter. Koga na to~ka }e i se soop{ti virtuelno pomestuvawe, toga{ vremeto se smeta za konstantno.
Toa mo`e de se objasni preku eden
ednostaven primer za edna materijalna to~ka, kako na slikata. Materijalnata to~ka e prinudena da se dvi`i po prava koja se vrti okolu koordinatniot po~etok vo ramninata . Od slikata se gleda deka dvi`eweto na vakva to~ka e neslobodno i deka pravata pretstavuva primer za vrska.
Vo nekoj moment na vremeto , neka prstenot se nao|a vo to~kata na podvi`nata prava. Vo sledniot mig , prstenot }e se najde vo to~kata .
Vistinskoto pomestuvawe }e bide vektorot i se gleda deka ova pomestuvawe nastanuva od silata koja deluva na to~kata.
Virtuelnoto pomestuvawe vo ovoj slu~aj }e bide zamisleno po dol`ina na pravata (levo ili desno od to~kata ). Spored toa, virtuelnoto pomestuvawe vo ovoj slu~aj pretstavuva relativno pomestuvawe na to~kata koe go ovozmo`uva vrskata vo nekoj vremenski moment.
Da pretpostavime deka pravata ne se vrti, tuku miruva vo zadadenata polo`ba. Vo toj slu~aj vistinskoto i virtuelnoto pomestuvawe }e se poklopat. 8.2. Virtuelna rabota
Posmatrame nesloboden materijalen sistem od to~ki na koj mu soop{tuvame virtuelno pomestuvawe . Ja razgleduvame to~kata od sistemot.
Rezultantata od dejstvuva~kite sili ja obele`uvame so .

18
Rabotata {to ja vr{i silata pri virtuelnoto pomestuvawe iznesuva:
( ) ( )iiiiiii rFsFrFA δδδδ ,cos, ∠==
Pritoa pretpostavuvame deka intenzitetot irδ e ednakov na elementarniot lak {to go pravi to~kata po traektorijata od virtuelnoto pomestuvawe.
ii sr δδ =
( ) ( )∑∑∑===
∠===n
iiiii
n
iii
n
ii rFsFrFAA
111,cos, δδδδδ
( )∑=
++=n
iiiiiii zZyYxXA
1δδδδ
- rabotata izrazena na ovoj na~in se narekuva Virtuelna rabota.
( ) 0, == ii rRA δδ
Uslov za karakteristika na vrskata
Ako virtuelnata rabota e nula od edna reakcija, toga{ vrskata e idealna (reakcija normalna).
- idealna vrska
8.3. Lagran`ov - Dalamberov princip. Op{ta ravenka na dinamikata
Poa|ame od
diferencijalnite ravenki za dvi`ewe na nesloboden materijalen sistem, ili preku Dalamberoviot princip:
( ) 0=−++ ∗iiii rmFF
( )ni ,,3,2,1 = Ako sekoja od ovie ravenki se pomno`i skalarno so vektorot
na virtuelnoto pomestuvawe irδ i se soberat, se dobiva:
m1
y
z
r1
x
R1
F1n
δr1
m2
R2
F2n
δr2r2
mi
Ri
Fin
δri
ri
mn RnFn
n
δrnrn
o

19
( ) 0,,11
=
+− ∑∑
=
∗
=
n
iii
n
iiiii rFrrmF δδ
Ako pretpostavime deka site vrski se idealni, ovaa ravenka preminuva vo:
( ) 0,1
=−∑=
n
iiiii rrmF δ
Ovaa ravenka se narekuva op{ta ravenka na dinamikata i go iska`uva
Lagran`-Dalamberoviot princip.
Razlikata iii rmF − , Dalamber ja narekol izgubena sila. Lagran`-Dalamberoviot princip glasi: Za vreme na dvi`eweto na eden materijalen sistem so idealni vrski, zbirot od elementarnite raboti na site izgubeni sili pri virtuelnite pomestuvawa sekoga{ e ramen na nula. Vo skalaren oblik:
( ) ( ) ( )[ ] 01
=−+−+−∑=
n
iiiiiiiiiiiii zzmZyymYxxmX δδδ
Izgubenata sila e ednakva na reakcijata na vrskata.
∗−=− iiii FrmF ( )ni ,,3,2,1 = Od III-ot Wutnov zakon, izgubenata sila e ednakva na silata so koja i -ta
podvi`na to~ka deluva na vrskata, odnosno na teloto (povr{inata) koe go ograni~uva dvi`eweto na materijalnata to~ka.
Dokolku site vrski {to go ograni~uvaat dvi`eweto na sistemot ne se idealni, tuku postojat vrski i so triewe, za da se primeni op{tata ravenka na dinamikata, treba na zadadeniot sistem da se dodadat silite na reakciite koi poteknuvaat od neidealnite vrski. Napomena: Op{tata ravenka na dinamikata ima golema prednost vo toa {to vo nea ne figuriraat nepoznati reakcii na vrski. Od op{tata ravenka na dinamikata (od Lagran`-Dalamberoviot princip) mo`e da se izvedat site zakoni na dvi`ewe.

20
8.4. Lagran`ov princip na virtuelni pomestuvawa. Op{ta ravenka na statikata. Princip na virtuelni brzini
Neka eden sistem od materijalni to~ki za koj se dadeni i vrskite, se nao|a vo
ramnote`a. Brzinite i zabrzuvawata na site ovie to~ki se ednakvi na nula. Toga{ Lagran`-Dalamberoviot princip }e go ima sledniot oblik:
Ovaa ravenka pretstavuva op{ta ravenka na statikata i go izrazuva poimot
Lagran`ov princip za virtuelnite pomestuvawa koj glasi: Materijalen sistem e vo ramnote`a samo toga{ koga zbirot na elementarnite virtuelni raboti od site zadadeni (aktivni) sili e ednakov na nula.
Prednosta na ovoj princip e vo toa {to vo nego ne vleguvaat reakciite na
idealnite vrski, tuku samo aktivnite sili.
Ravenkata (8.1) napi{ana vo skalaren oblik glasi:
- sili po x-oska; - sili po y-oska; - sili po z-oska
Ako ravenkata (8.1) ja podelime so proizvolna beskrajna mala golemina tδ i ja vovedeme oznakata:
tr
v ii δ
δ= ,
toga{ principot na virtuelni pomestuvawa }e go dobieme vo sledniot oblik:
( )∑=
=n
iii vF
10,
kade {to iv e virtuelna brzina na to~kite od sistemot.
( )
( ) ( )1.80,
0,
1
1
................................................
=
=⋅−
∑
∑
=
=
n
iii
n
iiiii
rF
rrmF
δ
δ
( )
kZjYiXF
zyx
zZyYxX
iiii
iii
n
iiiiiii
⋅+⋅+⋅=
=⋅+⋅+⋅∑=
0 1
δδδ

21
Osnovnata ravenka na statikata e:
Primer: Plo~a so te`ina G se potpira na sistem od stapovi, koi se povrzani so pomo{ na zglobovi. Trieweto i te`inata na stapovite ne se zema predvid. Poznati se vrednostite na rastojanieto a i agolot α. Da se opredelat goleminite na horizontalnite sili F, koi go dr`at sistemot vo ramnote`a.
Od geometriskite vrski sleduva:
Vo diferencijalen oblik:
Elementarnite raboti na silite se:
Sega ravenkata za virtuelna rabota mo`e da se napi{e:
Od kade sleduva deka:
I kone~no, vrskata pome|u silata F i G e:

22
8.5. Generalizirani koordinati
Generaliziranite koordinati za eden materijalen sistem se zbir na parametri koi ednozna~no go opi{uvaat dvi`eweto na materijalniot sistem.
Brojot na generaliziranite koordinati vo eden materijalen sistem e ist so brojot na stepeni na sloboda za istiot.
Razgleduvame mehani~ki sistem od n materijalni to~ki koj e pot~inet na
idealni nestacionarni vrski koi imaat oblik:
( ) ( )( )( )s
nitzyxf iii
,,3,2,1,,3,2,1
2.80,,,
==
==
α
α
Vo ovoj slu~aj sistemot ima sn −= 2σ stepeni na dvi`ewe.
Voveduvame sistem na novi promenlivi ~ij broj e ednakov na brojot na stepeni sloboda na dvi`ewe na materijalniot sistem
( )σ,,3,2,1 =jq j
i niv gi narekuvame generalizirani koordinati. Ovie koordinati se izbiraat taka da gi ispolnuvaat slednite dva uslova:
1. Vektorite na polo`bata na site to~ki od sistemot ( )niri ,,2,1 = da mo`e vo sekoj moment da bidat izrazeni kako funkcija od generaliziranite koordinati i vremeto.
( )( )( )σ,,3,2,1
,,3,2,1,
==
=
jni
tqrr jii
Vo skalaren oblik:
( ) ( )( )( )tqzz
tqyytqxx
jii
jii
jii
,,
3.8,
=
=
=
2. Ravenkite za vrska (8.2) mora da bidat identi~no zadovoleni za site
vrednosti na q .
Izborot na generaliziranite koordinati vo praksa se vr{i na toj na~in da re{enieto na zada~ata bide {to poednostavno.

23
Primer
Neka edna to~ka e prinudena da se dvi`i po krugot:
:
Se opredeluva brojot na stepenite na slobodata na dvi`eweto. Imame edna to~ka , i edna vrska . Brojot na stepenite na slobodata na dvi`eweto }e bide:
Za generalizirana koordinata se zema polarniot agol t.e. Toga{ ravenkite
pretstavuvaat specijalen slu~aj na ravenkite (2), koi gi zadovoluvaat i dvata uslova. Za generalizirana koordinata mo`e da se izbere i edna Dekartova koordinata, na primer: Toga{ ravenkite
se specijalni slu~ai na ravenkite (8.3) koi gi zadovoluvaat uslovite 1 i 2. So diferencirawe na po vremeto se dobiva:
Prviot izvod na po vremeto pretstavuva generalizirana brzina. Na
sekoja odgovara i soodvetna .
Analogno na generaliziranite brzini se voveduvaat i generalizirani
zabrzuvawa. Generalizirani zabrzuvawa se definiraat kako vtor izvod od
generaliziranite koordinati po vremeto , t.e.

24
m1
r1
F1
δr1
m2
F2
δr2
r2
mi
Fi
δri
ri
mnFn
δrnrn
o
8.6. Generalizirani sili
Razgleduvame eden materijalen sistem od n materijalni to~ki iM na koi
dejstvuvaat sili ( )niFi ,,2,1 = .
Se pretpostavuva deka materijalniot sistem ima σ stepeni sloboda na
dvi`ewe, t.e. negovata polo`ba e opredelena so generalizirani koordinati ( )σ,,2,1 =jq j .
Na edna od ovie koordinati jq se zadava eden beskrajno mal prirast jqδ , pri
{to nema da se promenat veli~inite kaj ostanatite generalizirani koordinati. Toga{ materijalniot sistem }e izvr{i edno virtuelno pomestuvawe, a
silite koi dejstvuvaat na sistemot }e izvr{at virtuelna rabota:
( ) ( )∑∑==
++==n
iiiiiii
n
iii zZyYxXsFA
11 , δδδδδ
Barame mehani~kata rabota A da se izrazi preku generaliziranite
koordinati jq .
Bidej}i se:
( ) ( ) ( )
σ..........3,2,1...........3,2,1
; ;
==
===
jni
qzzqyyqxx jiijiijii
toga{ varijaciite na Dekartovite koordinati }e bidat:

25
∑
∑
∑
=
=
=
⋅∂∂
=
⋅∂∂
=
⋅∂∂
=
σ
σ
σ
δδ
δδ
δδ
1
1
1
jj
j
ii
jj
j
ii
jj
j
ii
qqz
z
qqy
y
qqx
x
pa se dobiva:
∑ ∑= =
⋅
∂∂
+∂∂
+∂∂
=σ
δδ1 1
j
n
ij
j
ii
j
ii
j
ii q
qz
Zqy
Yqx
XA
Ako se zameni: ( )4.81
∑=
∂∂
+∂∂
+∂∂
=n
i j
ii
j
ii
j
iij q
zZ
qy
Yqx
XQ
se dobiva: ( )5.81
∑=
⋅=σ
δδj
jj qQA .
Veli~inata j
j qAQ
δδ
= sodr`i sili koi dejstvuvaat na materijalniot sistem, a
pretstavuva generalizirana sila koja odgovara na generaliziranata koordinata jq .
Brojot na generalizirani sili e ednakov na brojot na generalizirani koordinati t.e. na brojot na stepeni sloboda na dvi`ewe na materijalniot sistem. Generaliziranata sila jQ koja odgovara na generaliziranata koordinata jq
se opredeluva na toj na~in {to go presmetuvame zbirot na rabotite od site aktivni sili i reakcii na neidealnite vrski na generaliziranoto pomestuvawe
jqδ . Pritoa smetame deka site ostanati vozmo`ni pomestuvawa se ednakvi na nula.
Toga{ generaliziranata sila jQ }e bide ednakva na kaeficientot kaj jqδ .
Ravenkata (8.5) mo`e da se napi{e vo sledniot oblik: σσδδδδδ qQqQqQqQA jj +++++= 2211
Neka site generalizirani virtuelni pomestuvawa, osven jqδ , se ednakvi na nula
t.e.: 01121 ======= +− σδδδδδ qqqqq jj
0≠jqδ
Se dobiva
( )6.8j
j qAQ
δδ
=

26
Od ravenkata (8.6) se gleda deka dimenzijata na generaliziranata sila zavisi od koli~nikot na dimenzijata za rabota i dimenzijata za generaliziranata koordinata.
[ ] [ ][ ] koordinata
rabotaqAQ =
Primeri: 1. Neka e q - linearna golemina na pr. dol`ina ( )m , toga{ dimenzijata na Q se poklopuva so dimenzijata na obi~nata sila- kN . 2. Ako q ima dimenzija na agol ( )rad , toga{ Q ima dimenzija na moment od sila- kNm . Primer
Da se opredelat generaliziranite sili, ako vo to~kata B zglobno e povrzan tovar so te`ina P.
:
x i ρ se nezavisni koordinati ⇒ sistemot ima dva stepeni na sloboda.
001
=≠=
δϕδxQQ x
( )( )ttx
ϕρρ
==
2
1
( )[ ] xQxPGxPxGA δδαδαδαδ 1sinsinsin =+=⋅+⋅=
( ) αsin1 PGQ +=
00 =≠ xδδϕ
δϕδ BMA = δϕϕδ ⋅⋅⋅= sinlPA
ϕsin2 ⋅⋅= lPQ
x
φl
P
α
δx
AB
G

27
8.7. Generalizirani sili za slu~aj na konzervativno pole Dokolku imame pole na konzervativni sili, toga{ i izrazot na generalizirani sili }e bide ednostaven. Ako ja poznavame potencijalnata energija na materijalniot sistem
( ) ( )
( )nizyxEE iiipp
,,3,2,17.8,,
=
=
koja odgovara na silite iF toga{ imame:
i
ii
ii
i zUZ
yUY
xUX
∂∂
=∂∂
=∂∂
= ;;
a ako e
i
pi
i
pi
i
pi z
EZ
yE
YxE
X∂
∂−=
∂
∂−=
∂
∂−= ;;
i ako ovie proekcii gi zamenime vo izrazot za generalizirani sili (8.4) se dobiva:
( )8.81
∑=
∂∂
∂
∂+
∂∂
∂
∂+
∂∂
∂
∂−=
n
i j
i
i
p
j
i
i
p
j
i
i
pj q
zzE
qy
yE
qx
xE
Q
Od druga strana ako vo izrazot (8.7) za potencijalna energija, gi vneseme
generaliziranite koordinati namesto Dekartovite, se dobiva:
( )( )σ,,3,2,1 =
=
jqEE jpp
Parcijalniot izvod na pE po jq iznesuva:
( )9.81
∑=
∂∂
∂
∂+
∂∂
∂
∂+
∂∂
∂
∂=
∂
∂ n
i j
i
i
p
j
i
i
p
j
i
i
p
j
p
qz
zE
qy
yE
qx
xE
qE
So sporeduvawe na izrazite (8.8) i (8.9) se gleda deka za slu~aj na
konzervativno pole generaliziranata sila e:
( )
( )σ....,,.........3,2,1=∂
∂−=
jqE
Qj
pj
8.10

28
Spored toa generaliziranata sila mo`e da se presmeta na tri na~ina: 1. Slu`ej}i se so definicijata t.e. so izrazot (8.4).
∑=
∂∂
+∂∂
+∂∂
=n
i j
ii
j
ii
j
iij q
zZ
qy
Yqx
XQ1
2. So formirawe na izraz za virtuelna rabota, ravenka (8.5).
( ) ∑∑==
⋅==σ
δδδ11
,j
jj
n
iii qQsFA
3. Ako poleto na sili e konzervativno, generaliziranata sila se presmetuva so izrazot (8.10).
j
pj q
EQ
∂
∂−=
8.8. Lagran`ovi ravenki od vtor red
So voveduvawe na poimot za nezavisni generalizirani koordinati, Lagran`-Dalamberoviot princip ne doveduva do edna specijalna klasa na diferencijalni ravenki za dvi`ewe koi se narekuvaat Lagran`ovi ravenki od vtor red.
pri {to:
EK - kineti~ka energija na sistemot qj - generalizirana koordinata Qj - generalizirana sila
Ravenstvoto (8.11) pretstavuva Lagran`ovi ravenki od vtor red, i slu`i za dobivawe na diferencijalnite ravenki koi go opi{uvaat dvi`eweto na eden materijalen sistem, vo generalizirani koordinati.
^ekori za re{avawe na zada~i so pomo{ na Lagran`ovite ravenki od vtor
red se:
1. Da se opredeli brojot na stepeni na sloboda na dvi`ewe. 2. Da se opredelat generaliziranite koordinati ~ij broj e ist so brojot na
stepeni na sloboda. 3. Da se opredeli kineti~kata energija na sistemot. (Kineti~kata energija na
celiot sistem e zbir od kineti~kite energii na pooddelnite elementi) 4. Da se opredeli generaliziranata sila.
( )11.8................................. jj
k
j
k QqE
qE
dtd
=∂∂
−
∂∂

29
Pri ova postojat dva podslu~aja i toa:
a) Dokolku sistemot e konzervativen (nema disipacija na energija, nema triewe, nema nadvore{ni sili i momenti), toga{:
j
pj q
EQ
∂
∂−= Ep – potencijalna energija na sistemot
Drug na~in za opredeluvawe na Qj e so pomo{ na virtuelna rabota.
jj qQA δδ ⋅=
b) Dokolku sistemot ne e konzervativen toga{ Qj se bara isklu~ivo so
virtuelnata rabota Prednosti na Lagran`ovite ravenki od II red
- Imame onolku diferencijalni ravenki kolku {to imame stepeni na sloboda na dvi`ewe, odnosno kolku {to imame generalizirani koordinati,
- Lagran`ovite ravenki ne sodr`at vo sebe reakcii na vrski, - Vo Lagran`ovite ravenki od desnata strana se javuvaat generaliziranite
sili i so toa se eliminirani nepoznatite reakcii, - So integrirawe na ravenkite se opredeluvaat generaliziranite
koordinati jq vo funkcija od vremeto t .
8.9. Lagran`ova funkcija-kineti~ki potencijal Dokolku poleto na silite e konzervativno, toga{ Lagran`ovite ravenki od vtor red se:
j
p
j
k
j
k
qE
qE
qE
dtd ∂
−=∂∂
−
∂∂
Bidej}i potencijalnata energija ne zavisi od generaliziranite brzini,
ravenkata mo`e da se napi{e vo sledniot oblik:
( ) ( )0=
∂
−∂−
∂
−∂
j
pk
j
pk
qEE
qEE
dtd
So voveduvawe na nova funkcija

30
Lagran`ovite ravenki od vtor red postanuvaat
Ovie diferencijalni ravenki pretstavuvaat Lagran`ovi ravenki od vtor
red za konzervativen sistem. Novovovedenata funkcija se narekuva Lagran`ova funkcija ili
kineti~ki potencijal. Ravenkite na Lagran` imaat golema primena pri izu~uvaweto na slobodni
oscilacii na mehani~kite sistemi. Primenata na Lagran`ovite ravenki e mo`na i pri izu~uvaweto na prinudni oscilacii na mehani~ki sistemi so kone~en broj stepeni na sloboda na dvi`ewe.
Op{tiot oblik na Lagran`ovata ravenka od vtor red glasi:
Primer: Na dvete bo~ni strani na prizmata A se nao|aat tovarot B i cilindarot C. Tie se povrzani so elasti~no nerasteglivo ja`e koe so edniot kraj e obvitkano okolu cilindarot C a so drugiot kraj e zaka~eno so tovarot. Aglite na prizmata se 30o. Makarata D e so zanemarliva te`ina. Da se opredeli zabrzuvaweto na tovarot i cilindarot ako se pretpostavi deka masata na cilindarot e dvapati pogolema od masata na tovarot.
Kineti~kata energija na sistemot e:

31
ωr
x
y
E
KO
Kineti~kata energija za teloto B e: 2
21 xmE B
K
⋅=
Kineti~kata energija za teloto C e: 2120
20
22 ,
21
2rmJJymE r
CK
⋅=⋅⋅+⋅
= ω
sleduva: 2212
22
21
2 rC rmymEK
ω⋅⋅⋅+⋅
=
kade {to rω e brzina na vrtewe na cilindarot (agolna brzina).
Od kinematikata na sistemot o~igledna e slednata relacija:
Dokolku e zemeno poslednoto ravenstvo vo ravenkata za kineti~kata energija, se dobiva:
( )
21
2212
22
21
222 ryxrmymxm
EK +
⋅⋅
+⋅
+⋅
=
pa spored uslovite na zada~ata, sledi: mmmm ⋅== 2, 21 kone~niot izraz za kineti~kata energija }e bide: Za opredeluvawe na generaliziranite sili potrebna e potencijalnata energija, koja se opredeluva spored sledniot izraz: ^lenovite na Lagran`ovata ravenka }e bidat:
( )
( )
gmgmy
EQ
gmgmx
EQ
yExmymxmym
dtd
yE
dtd
xEymxmymxm
dtd
xE
dtd
Py
Px
KK
KK
⋅=⋅⋅⋅=−=
⋅=⋅⋅=−=
=⋅⋅+⋅⋅=⋅⋅+⋅⋅=
=⋅⋅+⋅⋅=⋅⋅+⋅⋅=
αδδ
αδδ
δδ
δδ
δδ
δδ
sin2
2sin
0;2424
0;2323
αα sin2sin ⋅⋅⋅⋅−⋅⋅⋅−= ygmxgmEP
( ) ( )yxyxmyyxxmymxmEK
⋅⋅+⋅+⋅=+⋅⋅++⋅
+⋅
= 443212
22
22222
22
1ryx
OKEKyx
OKy
KEx
r
+
=++
====ωϕ

32
Bidej}i imame dve generalizirani koordinati, }e imame i dve Lagran`ovi ravenki:
gmxmym
gmymxm
⋅=⋅⋅+⋅⋅
⋅=⋅⋅+⋅⋅
242
23
Otkako }e podelime so masata:
gyx
gyx
=⋅+⋅
=⋅+⋅
422
23
So re{avawe na sistemot na ravenki po x i y , se dobiva:
4
0gy
x
=
=
8.10. Cikli~ni koordinati i nivni integrali
Razgleduvame eden materijalen sistem od n materijalni to~ki. Neka na materijalniot sistem dejstvuvaat samo konzervativni sili pri {to se dobiva eden konzervativen mehani~ki sistem. Za takov mehani~ki sistem postoi Lagran`ova funkcija L , odnosno kineti~ki potencijal
pk EEL −=
Sistemot ima σ stepeni sloboda na dvi`ewe i negovoto dvi`ewe e opredeleno so σ generalizirani koordinati.
( ) ( )σ,,3,2,1, == jtqq jj
Onie generalizirani koordinati koi ne vleguvaat direktno (eksplicitno) vo izrazot za kineti~kiot integral L se narekuvaat cikli~ni koordinati.
] e pretpostavime deka od σ generalizirani koordinati imame l cikli~ni koordinati
( ) ( )lktqq kk ,,3,2,1, == kade {to σ<l . Toga{ parcijalnite izvodi od kineti~kiot potencijal po ovie cikli~ni koordinati se ednakvi na nula.
( )lkjqL
j
,,3,2,1,0 ===∂∂

33
Vo takov slu~aj za Lagran`ovi ravenki od vtor red na konzervativen sistem se dobiva:
0=∂∂
−
∂∂
jj qL
qL
dtd
( )ljqL
dtd
j
,,3,2,1,0
==
∂∂
( )12.8.
constCqL
jj
==∂∂
( )lj ,,3,2,1 = Ravenkite (8.12) se narekuvaat cikli~ni integrali.