DINÂMICA VETORIAL TEORIA - eesc.usp.br Vetorial.pdf · 1 CAPÍTULO 1 CINEMÁTICA VETORIAL DA...
102
ESCOLA DE ENGENHARIA DE SÃO CARLOS DEPARTAMENTO DE ENGENHARIA MECÂNICA UNIVERSIDADE DE SÃO PAULO DINÂMICA VETORIAL TEORIA MARIO FRANCISCO MUCHERONI SÃO CARLOS - 2011
Transcript of DINÂMICA VETORIAL TEORIA - eesc.usp.br Vetorial.pdf · 1 CAPÍTULO 1 CINEMÁTICA VETORIAL DA...
ESCOLA DE ENGENHARIA DE SÃO CARLOS
DEPARTAMENTO DE ENGENHARIA MECÂNICA
UNIVERSIDADE DE SÃO PAULO
DINÂMICA VETORIAL
TEORIA
MARIO FRANCISCO MUCHERONI
SÃO CARLOS - 2011
1
CAPÍTULO 1
CINEMÁTICA VETORIAL DA PARTÍCULA
Freqüentemente a segunda lei de Newton é escrita na forma clássica que
relaciona a força resultante com a aceleração da partícula. O estudo da cinemática
da partícula tem como objetivo obter as relações matemáticas entre as grandezas
posição, velocidade e aceleração, num determinado referencial.
1.1 VETORES POSIÇÃO, VELOCIDADE E ACELERAÇÃO
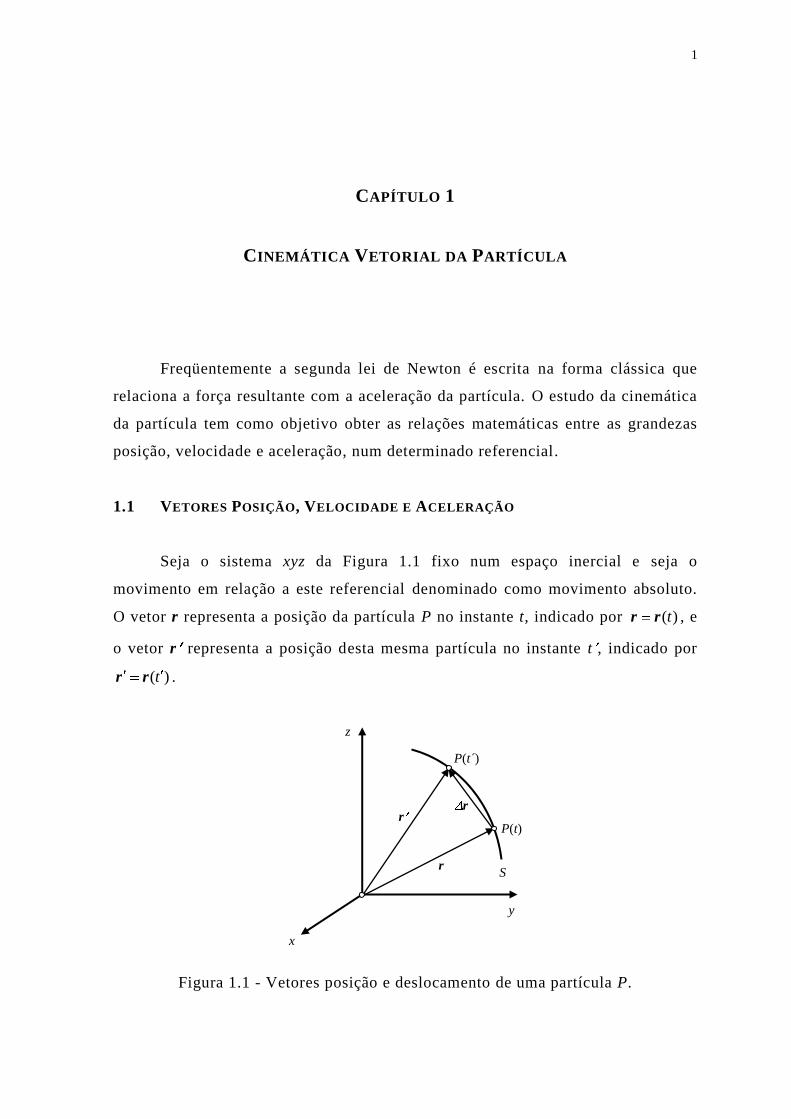
Seja o sistema xyz da Figura 1.1 fixo num espaço inercial e seja o
movimento em relação a este referencial denominado como movimento absoluto.
O vetor r representa a posição da partícula P no instante t, indicado por )(trr , e
o vetor r representa a posição desta mesma partícula no instante t , indicado por
)(trr .
Figura 1.1 - Vetores posição e deslocamento de uma partícula P.
z
x
y
r
r r
P(t)
P(t´)
S

2
Por definição, a velocidade no instante t é dada por:
vr r r r
t t tlim
t tlim
t
d
dt
'
' 0
(1.1)
onde r r r é o vetor deslocamento no intervalo de tempo ttt , conforme
mostra a Figura 1.1. Analisando o limite dado na equação (1.1) pode-se concluir
que o vetor velocidade v é tangente à curva S no instante t.
Figura 1.2 - Vetores velocidade de uma partícula P.
De maneira semelhante, define-se a aceleração da partícula P no instante t
como:
av v v v r
t t tlim
t tlim
t
d
dt
d
dt'
'
' 0
2
2 (1.2)
onde v v v corresponde à variação do vetor velocidade, conforme mostra a
Figura 1.2. Analisando o limite na equação (1.2) pode-se concluir que o vetor
aceleração possui uma componente tangencial e uma componente normal (exceto
para trajetórias retilíneas) em relação à curva S no instante t.
z
x
y
v
v
r
r r
P(t)
P(t’)
S
v v
v
P
3
1.2 COMPONENTES TANGENCIAL E NORMAL
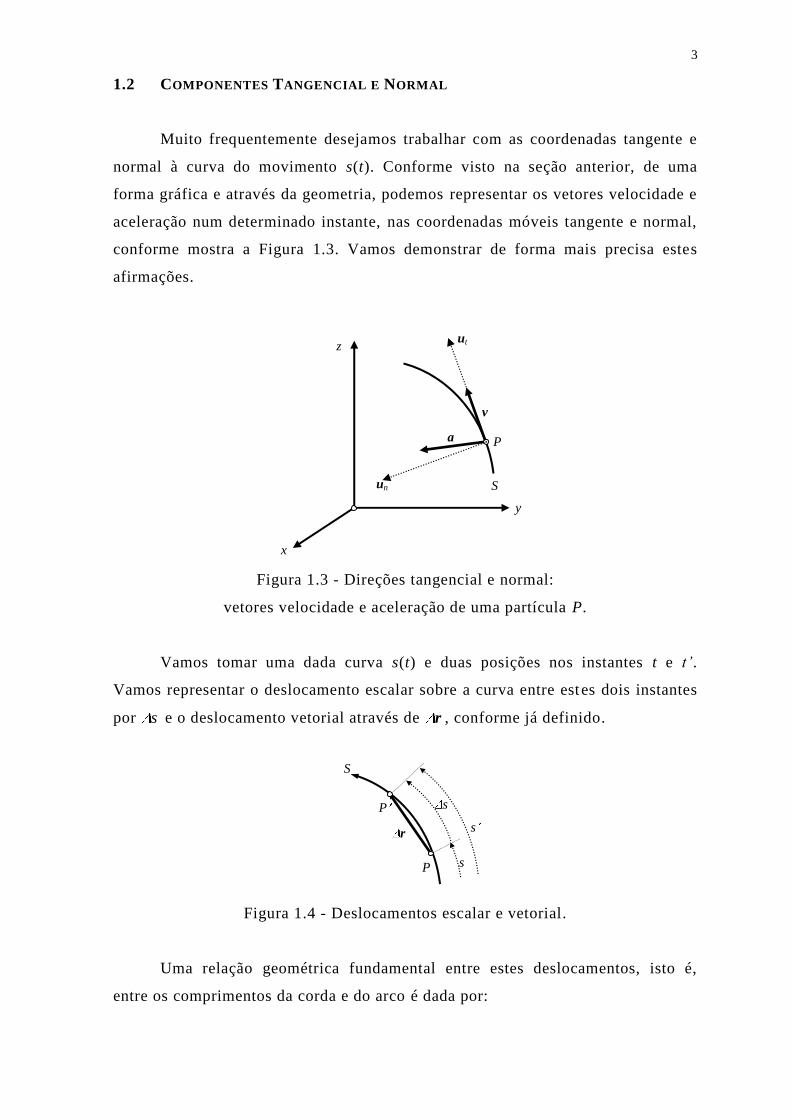
Muito frequentemente desejamos trabalhar com as coordenadas tangente e
normal à curva do movimento s(t). Conforme visto na seção anterior, de uma
forma gráfica e através da geometria, podemos representar os vetores velocidade e
aceleração num determinado instante, nas coordenadas móveis tangente e normal,
conforme mostra a Figura 1.3. Vamos demonstrar de forma mais precisa estes
afirmações.
Figura 1.3 - Direções tangencial e normal:
vetores velocidade e aceleração de uma partícula P.
Vamos tomar uma dada curva s(t) e duas posições nos instantes t e t’.
Vamos representar o deslocamento escalar sobre a curva entre est es dois instantes
por s e o deslocamento vetorial através de r , conforme já definido.
Figura 1.4 - Deslocamentos escalar e vetorial.
Uma relação geométrica fundamental entre estes deslocamentos, isto é,
entre os comprimentos da corda e do arco é dada por:
z
x
y
v
a P
S un
ut
P
S
s
s
P s
r

4
1s
lim0t
r (1.3)
onde r r r é o vetor deslocamento e sss é o comprimento do trecho da
curva percorrido no intervalo de tempo t , conforme mostra a Figura 1.3.
Analisando o limite dado na equação (1.3) pode-se concluir que:
t0t ds
d
slim u
rr (1.4)
onde tu é o vetor unitário da direção tangente ou versor tangente. Lembrando que
dt
drv (1.5)
então
tvds
d
dt
ds
dt
du
rrv (1.6)
Figura 1.5 - Vetor velocidade de uma partícula P.
Assim, podemos concluir que o vetor velocidade v é tangente à curva S no instante
t. Portanto, dada s = s(t) uma função do percurso sobre a curva S, podemos definir
a derivada
dt
dsv (1.7)
z
x
y
v
P(t)
S
s
s
P(t’) s

5
como a velocidade na forma escalar, uma função positiva ou negativa de acordo
com o sentido do percurso sobre S.
A aceleração da partícula P em componentes tangencial e normal pode ser
obtida através de
dt
dva (1.8)
Substituindo (1.6) em (1.8) obtemos
dt
dv
dt
dvv
dt
d
dt
d ttt
uuu
va )( (1.9)
É necessário analisar a segunda parcela de (1.9). Inicialmente vamos decompor a
derivada temporal do versor tangente pela regra da cadeia e, em seguida,
aplicamos (1.7) e a relação geométrica dds para obter
d
dv
sd
d
dt
sd
dt
d ttt uuu (1.10)
Figura 1.5 - Versores tangentes.
Para calcularmos a derivada do versor tangente em θ vamos lembrar que
z
x
y
ut
P(t)
S
ut P(t’)
ut ut
ut’
s
´

6
t
0
tlim
d
d uu (1.11)
Vamos analisar a Figura 1.5. Verificamos que os versores nos instantes t e t’, e o
vetor da variação entre estes dois instantes, formam um triângulo isósceles tendo
os dois lados iguais de comprimento unitário e a sua base dada por
uu2
sen2t (1.12)
onde u é o versor da direção de tu . Substituindo (1.12) em (1.11), obtemos
n00
t
2
2sen
lim2
sen2
limd
duuu
u (1.13)
Levando (1.13) em (1.10), obtemos
nt v
dt
du
u (1.14)
O resultado obtido em (1.14) é então aplicado em (1.9)
n
2
tt
v
dt
dvv
dt
d
dt
duuu
v)( (1.15)
Assim obtemos as componentes tangencial e normal da aceleração, ou seja,
nntt aadt
duu
va (1.16)
onde
vdt
dvat
aceleração tangencial (1.17)
2
n
va aceleração normal (1.18)

7
Observemos inicialmente que em qualquer movimento retilíneo a aceleração
normal é nula, enquanto que nos movimentos curvilíneos esta aceleração será
sempre diferente de zero, mesmo quando a velocidade tiver módulo constan te.
Assim podemos concluir que o único movimento possível com aceleração total
nula é o retilíneo uniforme. Neste caso tanto a aceleração tangencial como a
aceleração normal são nulas. O movimento retilíneo não uniforme terá aceleração
tangencial diferente de zero e qualquer movimento curvilíneo terá aceleração
normal diferente de zero, além da tangencial no caso de movimento não uniforme.
Neste sistema de coordenadas, há uma terceira direção que é perpendicular
ao plano que contém os vetores ut e un, denominada direção binormal. Nesta
direção a componente da aceleração é sempre nula. É definida pelo versor:
ntb uuu (1.19)
1.3 COMPONENTES RETANGULARES
Escolhendo as coordenadas retangulares xyz e os versores de suas direções
indicados por i, j e k, respectivamente, podemos escrever o vetor posição r = r(t)
kjir zyx (1.20)
Figura 1.6 - Movimento em coordenadas cartesianas.
z
x
y
v
a P
S
i j
k
r

8
Nestas coordenadas o movimento da partícula P é dado pela composição de três
movimentos retilíneos x=x(t), y=y(t) e z=z(t). A velocidade deste movimento em
relação ao referencial xyz é dada por:
kjikjir
v zyxdt
dz
dt
dy
dt
dx
dt
d (1.21)
onde i , j e k são os vetores unitários do referencial xyz. A aceleração deste
movimento em relação a este referencial é dada por
kjikjiv
a zyxdt
zd
dt
yd
dt
xd
dt
d2
2
2
2
2
2
(1.22)
Sendo a velocidade um vetor tangente à trajetória, é possível obter o versor
tangente através de
222
t
zyx
v
v
vu (1.23)
Quando houver interesse, pode-se obter a componente tangencial da aceleração
tta ua (1.24)
e a aceleração normal
2
t
2
n aaa (1.25)
ou, vetorialmente,
tn aaa (1.26)
Portanto, o versor da direção normal pode ser obtido através de
n
nn
a
au (1.27)
9
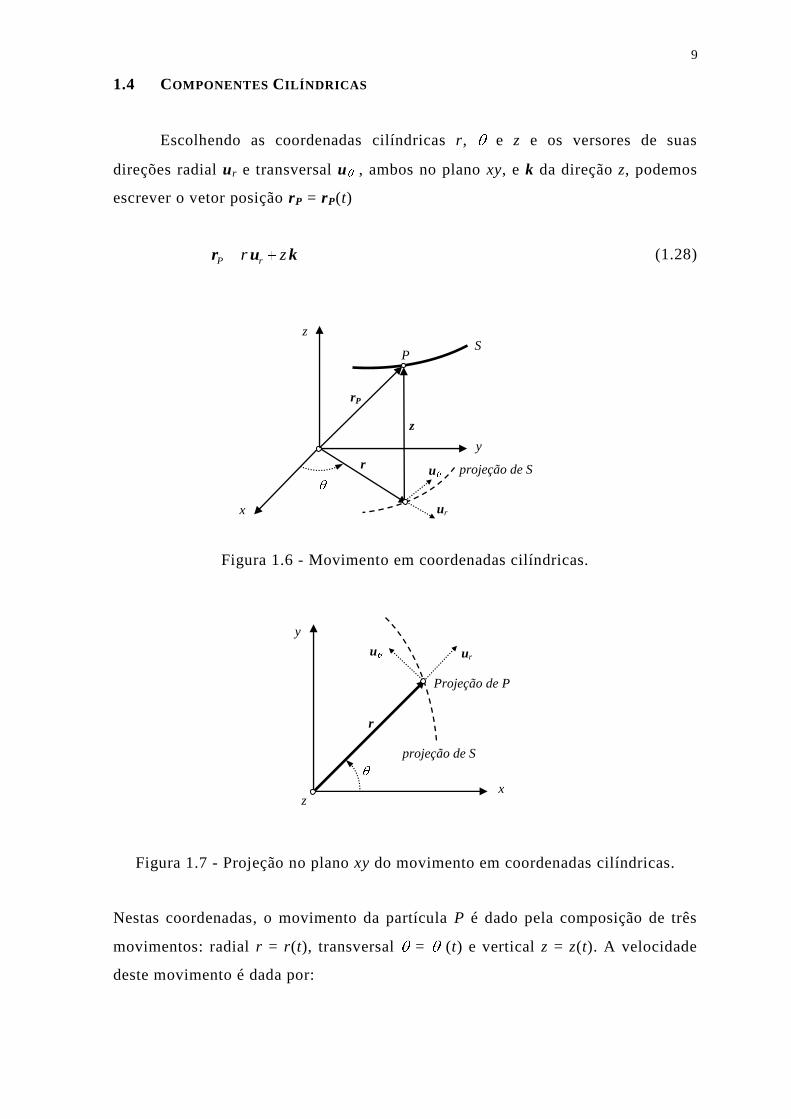
1.4 COMPONENTES CILÍNDRICAS
Escolhendo as coordenadas cilíndricas r, e z e os versores de suas
direções radial ur e transversal u , ambos no plano xy, e k da direção z, podemos
escrever o vetor posição rP = rP(t)
kur zr rP (1.28)
Figura 1.6 - Movimento em coordenadas cilíndricas.
Figura 1.7 - Projeção no plano xy do movimento em coordenadas cilíndricas.
Nestas coordenadas, o movimento da partícula P é dado pela composição de três
movimentos: radial r = r(t), transversal = (t) e vertical z = z(t). A velocidade
deste movimento é dada por:
y
z x
ur u
Projeção de P
projeção de S
r
z
x
y
ur
u
S
projeção de S r
P
rP
z
10
ku
ur
vdt
dz
dt
dr
dt
dr
dt
d rr
P (1.29)
A derivada da segunda parcela é dada por
d
d
dt
d
dt
d rr uu (1.30)
usando o resultado obtido em (1.13), por analogia, pode-se escrever que
uu
dt
d
dt
d r (1.31)
Aplicando (1.31) em (1.29), obtém-se a velocidade
kuur
vdt
dz
dt
dr
dt
dr
dt
dr
P (1.32)
onde
rdt
drvr
(1.33)
rdt
drv (1.34)
zdt
dzvz
(1.35)
Derivando a velocidade dada em (1.32), obtemos a aceleração
ku
uuu
uv
a2
2
2
2
rr2
2
dt
zd
dt
d
dt
dr
dt
dr
dt
d
dt
dr
dt
d
dt
dr
dt
rd
dt
d (1.36)
Aplicando (1.31) em (1.36) obtemos
ku
uuuv
a2
2
2
2
r2
2
dt
zd
dt
d
dt
dr
dt
dr
dt
d
dt
dr2
dt
rd
dt
d (1.37)
Usando o resultado obtido em (1.13), por analogia, pode-se escrever que

11
rdt
d
dt
du
u (1.38)
e aplicando (1.38) em (1.37) obtemos finalmente:
kuuuuv
a2
2
r2
2
r2
2
dt
zd
dt
d
dt
dr
dt
dr
dt
d
dt
dr2
dt
rd
dt
d (1.39)
ou
kuuv
a2
2
2
2
r
2
2
2
dt
zd
dt
d
dt
dr2
dt
dr
dt
dr
dt
rd
dt
d (1.40)
Assim, em componentes
2
2
2
2
r rrdt
dr
dt
rda (1.41)
r2rdt
d
dt
dr2
dt
dra
2
2
(1.42)
zdt
zda
2
2
z (1.43)
1.5 MOVIMENTO RELATIVO ENTRE PARTÍCULAS
Até aqui, os referenciais utilizados foram considerados como absolutos.
Frequentemente, em movimentos mais complexos, é interessante determinar as
características cinemáticas desses movimentos a partir de dois ou mais
movimentos identificados como relativos. Sejam os movimentos de duas partículas
A e B, num referencial absoluto xyz, conforme mostra a Figura 1.8, e os seus
vetores posição, dados por
kjir AAAA zyx e kjir BBBB zyx (1.44)
12
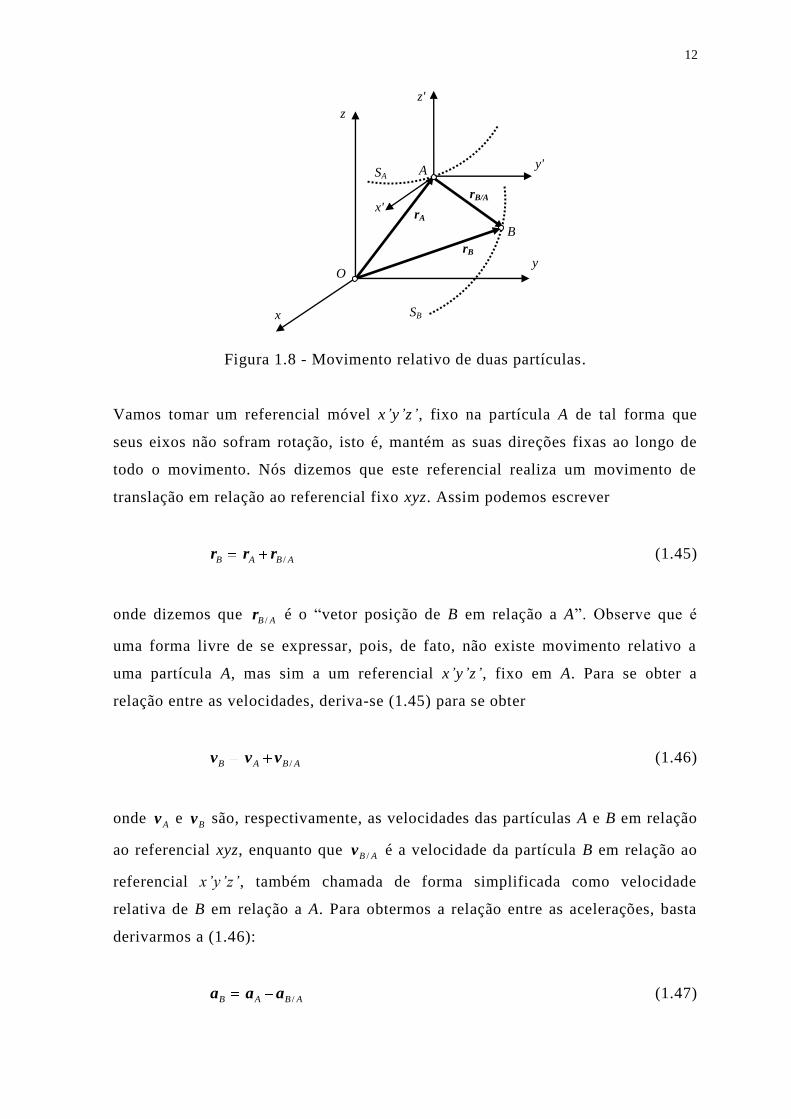
Figura 1.8 - Movimento relativo de duas partículas.
Vamos tomar um referencial móvel x’y’z’, fixo na partícula A de tal forma que
seus eixos não sofram rotação, isto é, mantém as suas direções fixas ao longo de
todo o movimento. Nós dizemos que este referencial realiza um movimento de
translação em relação ao referencial fixo xyz. Assim podemos escrever
ABAB /rrr (1.45)
onde dizemos que AB /r é o “vetor posição de B em relação a A”. Observe que é
uma forma livre de se expressar, pois, de fato, não existe movimento relativo a
uma partícula A, mas sim a um referencial x’y’z’, fixo em A. Para se obter a
relação entre as velocidades, deriva-se (1.45) para se obter
ABAB /vvv (1.46)
onde Av e
Bv são, respectivamente, as velocidades das partículas A e B em relação
ao referencial xyz, enquanto que AB /v é a velocidade da partícula B em relação ao
referencial x’y’z’, também chamada de forma simplificada como velocidade
relativa de B em relação a A. Para obtermos a relação entre as acelerações, basta
derivarmos a (1.46):
ABAB /aaa (1.47)
z
x
y O
A SA
rA
SB
y'
z'
rB
rB/A
x'
B
13
CAPÍTULO 2
DINÂMICA DA PARTÍCULA: FORÇA E ACELERAÇÃO
Neste capítulo será analisada a lei de Newton na sua forma diferencial,
aplicada ao movimento de partículas. Nesta forma a força resultante das forças
aplicadas numa partícula está relacionada com a sua aceleração.
2.1 LEIS DE NEWTON PARA MOVIMENTOS
A mecânica vetorial está baseada na teoria de Newton, apresentada
originalmente em 1687. Newton utilizou para o desenvolvimento de sua teoria os
trabalhos de outros cientistas que o precederam, especialmente de Galileo e de
Kepler. Através de experimentos práticos, Galileo demonstrou alguns princípios do
movimento dos corpos. Entretanto Newton foi o primeiro a estabelecer de uma
forma sistemática um conjunto de leis gerais para o estudo desses movimentos.
Estas leis foram formuladas inicialmente para partículas simples , assumindo a
existência de sistemas de referência, em relação aos quais são válidas. Estes
sistemas de referência, chamados sistemas inerciais ou galileanos, formam um
conjunto especial de sistemas de referência que estão em repouso ou em
movimento retilíneo uniforme, um em relação ao outro. Na mecânica newtoniana
um sistema inercial é definido como aquele que está em repouso ou em movimento
uniforme em relação a uma suposta posição média de estrelas fixas e distantes.
Entretanto, para muitos objetivos práticos é possível adotar como inercial um
sistema fixo ao sistema solar. Em muitas aplicações da engenharia é possível
adotar como inercial um sistema de referência fixo à superfície da terra. Newton
enunciou suas leis como axiomas do movimento, hoje apresentadas da seguinte
forma:
14
Primeira lei: Uma partícula se move em linha reta com velocidade
constante quando não há forças atuando sobre ela .
Uma partícula é a idealização de um corpo material cujas dimensões são
muito pequenas quando comparadas com as distâncias a outros corpos e cujo
movimento relativo entre seus pontos não é relevante para o movimento do corpo.
Matematicamente estes corpos são representados por massas pontuais.
Sendo FR a força resultante numa partícula e v a sua velocidade em relação
a um referencial inercial, a primeira lei pode ser estabelecida por:
0dt
d0R
vF ou v = constante (2.1)
Segunda lei: Uma partícula se move de maneira tal que a força resultante a
ela aplicada é igual à derivada em relação ao tempo da quantidade de movimento
linear.
A quantidade de movimento linear, ou simplesmente quantidade de
movimento, é definida como o produto da massa pela velocidade, ou seja, igual a
mv. Assim a segunda lei pode ser dada por:
dt
mdR
)( vF (2.2)
Sendo constante a massa da partícula, então a equação (2.2) pode ser escrita
como:
av
F mdt
mdR
)( (2.3)
Terceira lei: Quando duas partículas atuam uma sobre a outra, as forças
de interação correspondentes situam-se sobre a linha que une estas partículas;
são iguais em módulo e de sentidos contrários.
Esta lei também é conhecida como lei de ação e reação. Indicando por FAB a
força exercida pela partícula A sobre a partícula B e FBA a força que a partícula B
exerce em A, a terceira lei pode ser estabelecida matematicamente por:

15
F FAB BA (2.4)
Newton também propôs uma lei para reger a atração mútua entre duas
partículas, denominada Lei de Newton da Atração Gravitacional, dada por
2
21G
r
mmGF (2.5)
onde
FG é força de atração entre as duas partículas
G = 66,73 (10-12
) m3/(kg.s
2) é uma constante universal de gravitação
m1, m2 são as massas de cada uma das partículas
r é a distância entre as partículas
Analisando a lei dada por (2.5) poderemos considerar como desprezível esta
força quando se trata da atração entre dois corpos sobre a terra. Se considerarmos,
por outro lado, a atração que a terra exerce sobre um corpo em sua superfície,
pode-se mostrar que esta força é dada por
mgR
MmGW
2 (2.6)
onde
W é a força de atração entre a terra e o corpo, denominada peso
M é a massa da terra
R é igual ao raio da terra
m é a massa corpo na superfície da terra
2R
MGg é denominada aceleração da gravidade
Esta constante de fato varia ao longo da superfície da terra, mas estas
variações são consideradas pequenas na maioria das aplicações em engenharia. Os
valores de referência adotados universalmente são: g = 9,81 m/s2 ou 32,2 ft/s
2 .

16
2.2 EQUAÇÃO DE MOVIMENTO PARA PARTÍCULA
Quando várias forças atuam sobre uma partícula, a equação (2.3) pode ser
escrita como
aFF mR (2.7)
onde FR é a força resultante do sistema de forças que atua na partícula de massa m.
A Figura 2.1 ilustra o diagrama do corpo livre de uma partícula P onde atuam duas
forças.
Figura 2.1 - Diagrama do corpo livre de uma partícula P.
2.3 EQUAÇÃO DE MOVIMENTO PARA UM SISTEMA DE PARTÍCULAS
Seja um sistema de várias partículas e sejam as forças externas ao sistema
indicada por F e as internas indicadas por f. Aplicando a lei de Newton para cada
partícula deste sistema podemos escrever
iijii m afF (2.8)
onde
Fi é a força resultante externa na partícula i
fji é a força da partícula j sobre a partícula i
mi é a massa da partícula i
Podemos agora somar a equação (2.8) aplicada a todas as partículas internas ao
sistema, cujo resultado é
=
P
F1
F2
P
FR = ma
17
iijii m afF (2.9)
Sendo as fji forças internas ao sistema dado, sempre ocorrerão em pares de ação e
reação, resultando numa soma nula. Assim (2.9) é igual a
iiiR m aFF (2.10)
Agora vamos lembrar que a posição rG do centro de massa de um sistema de
partículas de massas mi é dada por
iiG mm rr (2.11)
onde
imm é a massa total do sistema
Derivando (2.11) duas vezes no tempo, obtemos
iiG mm aa (2.12)
Substituindo (2.12) em (2.10), resulta
GR maF (2.13)
que é uma forma parecida com a equação de movimento para uma partícula, mas
cujos termos devem ser interpretados de forma diferente. A força FR é a força
resultante de todas as forças externas que atuam no sistema de partículas; a massa
m é a soma de todas as massas das partículas e a aceleração aG é a aceleração do
centro de massa do sistema. O centro de massa do sistema está localizado numa
posição que varia com o tempo, em geral não coincidente com nenhuma partícula
do sistema.
18
2.4 EQUAÇÃO DE MOVIMENTO: COORDENADAS RETANGULARES
Vamos tomar um sistema inercial de referência nas coordenadas xyz. A força
resultante aplicada a uma partícula de massa m pode ser escrita como
kjiFF zyxR FFF (2.14)
e a equação do movimento
)( kjikji zyxzyx aaamFFF (2.15)
Logo, esta equação vetorial pode ser substituída por três equações escalares
xx amF
yy amF (2.16)
zz amF
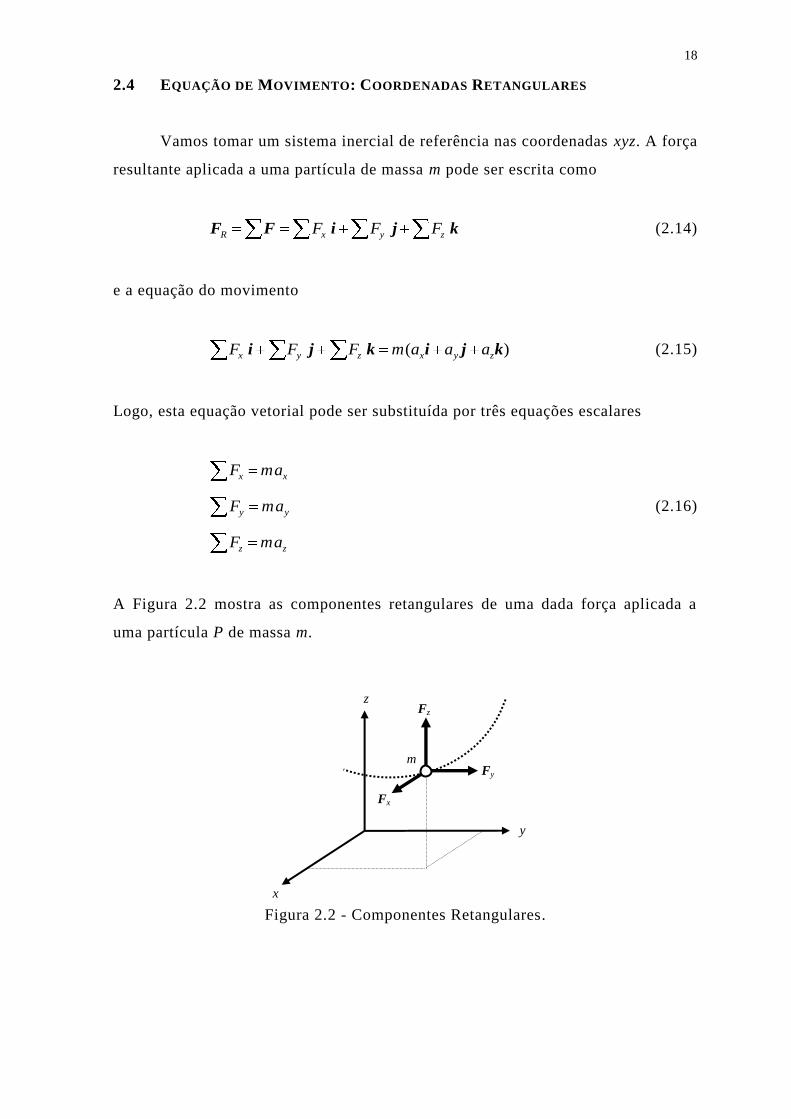
A Figura 2.2 mostra as componentes retangulares de uma dada força aplicada a
uma partícula P de massa m.
Figura 2.2 - Componentes Retangulares.
z
x
y
Fz
m Fy
Fx
19
2.5 EQUAÇÃO DE MOVIMENTO: COORDENADAS TANGENCIAL E NORMAL
Em muitos movimentos que ocorrem em trajetórias curvilíneas conhecidas,
forças aplicadas podem ser escritas em função das coordenadas tangencial, normal
e binormal (esta completa o sistema de referência numa direção normal ao plano
do movimento) como
bbnnttR FFF uuuFF (2.17)
e a equação do movimento
)( nnttbbnntt aamFFF uuuuu (2.18)
Logo, esta equação vetorial pode ser substituída por três equações escalares
tt amF
nn amF (2.19)
0Fb
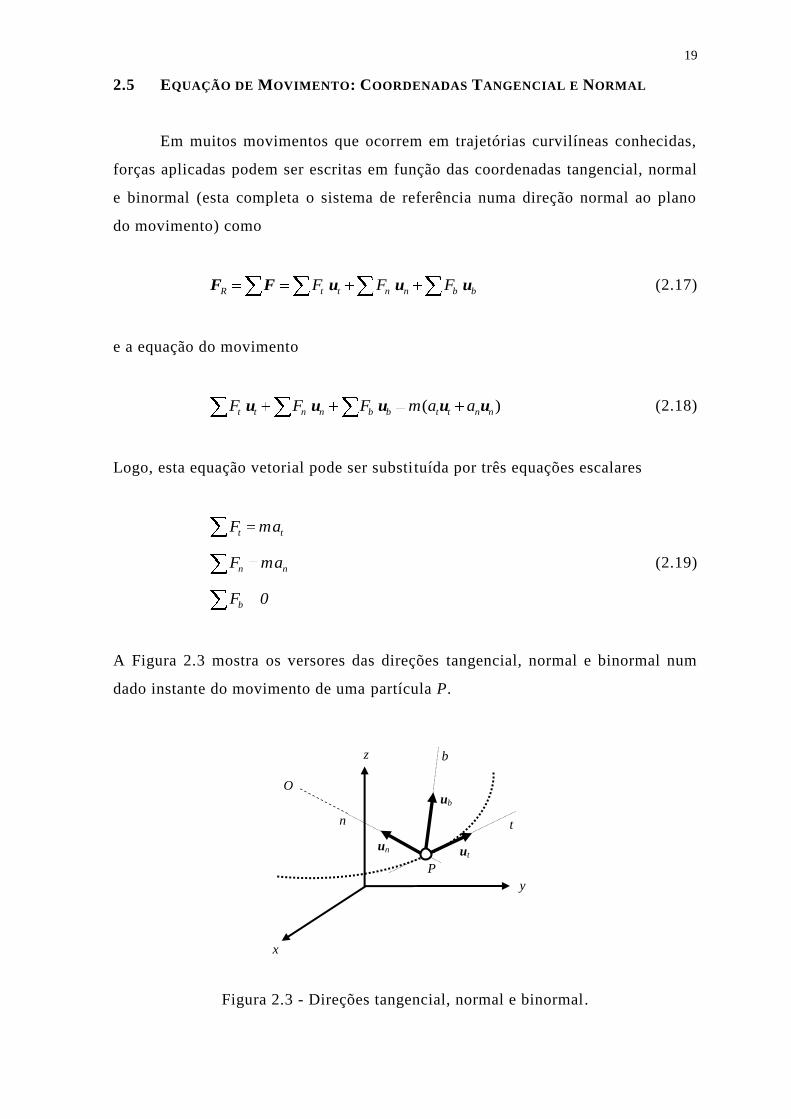
A Figura 2.3 mostra os versores das direções tangencial, normal e binormal num
dado instante do movimento de uma partícula P.
Figura 2.3 - Direções tangencial, normal e binormal.
y
t
z
x
ub
P
ut un
n
O
b

20
2.6 EQUAÇÃO DE MOVIMENTO: COORDENADAS CILÍNDRICAS
Alguns movimentos são mais facilmente escritos em função de coordenadas
cilíndricas. Nestes casos as forças aplicadas podem ser escritas como
zzrrR FFF uuuFF (2.20)
e a equação do movimento
)( zzrrzzrr aaamFFF uuuuuu (2.21)
Logo, esta equação vetorial pode ser substituída por três equações escalares
rr amF
amF (2.22)
zz amF
A Figura 2.4 mostra os versores das direções tangencial, normal e binormal num
dado instante do movimento de uma partícula P.
Figura 2.4 - Coordenadas cilíndricas.
y
r
z
x
uz
P
ur
u
u
ur
21
CAPÍTULO 3
DINÂMICA DA PARTÍCULA: TRABALHO E ENERGIA
Neste capítulo será analisada a lei de Newton numa de suas formas
integrais, aplicada ao movimento de partículas. Define-se o conceito de trabalho e
energia cinética e através da integração da lei de Newton ao longo da trajetória do
movimento podemos relacionar as forças aplicadas num intervalo de tempo com a
variação da velocidade.
3.1 TRABALHO REALIZADO POR UMA FORÇA
O conceito de trabalho como definido na Mecânica da partícula está
relacionado à ação de forças aplicadas na direção do movimento. Numa forma
diferencial, o trabalho U de uma força F é dado por
rF ddU (3.1)
A Figura 3.1 ilustra as grandezas envolvidas nesta definição. Logo
dsFdU cos (3.2)
Podemos observar que
0dsFdU cos quando 900
0dsFdU cos quando 90
0dsFdU cos quando 18090

22
Figura 3.1 - Elementos da definição de trabalho de uma força.
Logo, a partir de (3.1) e (3.2), o trabalho U de uma força F durante o movimento
que vai da posição r1 até a posição r2 é uma grandeza escala dada por
2
1
2
1
s
s21 dsFdU cos
r
rrF (3.3)
Observe que o trabalho de uma força constante FC, ao longo de uma trajetória
retilínea, é dado por
)(coscos 12C
s
sCC21 ssFdsFdU
2
1
2
1
r
rrF (3.4)
Figura 3.2 - Trabalho de uma força constante.
O trabalho da força peso W, sendo y a direção vertical, é dado por
2
1
2
1
dzdydxWdU 21
r
r
r
rkjijrF )()( (3.5)
ou seja
r
ds
S
P
F
r’
dr
s s
s1
FC
s2

23
yWyyWWdyU 21
y
y21
2
1
)( (3.6)
Figura 3.3 - Trabalho da força-peso W.
O trabalho da força de uma mola linear aplicada a uma partícula P que se desloca
ao longo do eixo x pode ser obtido a partir de:
2
1
x
xm21 dU rF (3.7)
O modelo linear de força de mola estabelece que sua intensidade é proporcional ao
seu deslocamento x, quando x = 0 corresponde à posição de mola livre. Assim a
força sobre uma mola de constante elástica k possui a forma kx. Aplicada sobre a
partícula P esta força tem sinal contrário ao deslocamento x. Portanto, a força de
mola sobre a partícula P é dada por
xkFm (3.8)
Logo
)( 2
2
2
1
x
x21 xxk
2
1dxxkU
2
1
(3.9)
3.2 PRINCÍPIO DO TRABALHO E ENERGIA
Considere agora a lei de Newton dada pela equação do movimento, aplicada
a uma partícula P de massa m:
y
z
x
W
P
r1
r2

24
aF m (3.10)
Vamos calcular o trabalho da força resultante, num movimento desta
partícula entre duas posições r1 e r2, com t2 > t1:
2
1
2
1
dmdr
r
r
rrarF (3.11)
Nesta equação, como o processo de integração é linear, então:
2
1
2
1
dmdr
r
r
rrarF (3.12)
ou seja
2
1
dmU 21
r
rra (3.13)
Aplicando a relação cinemática diferencial vvra dd em (3.13) obtemos
2
1
dmU 21
v
vvv (3.14)
Realizando a integração do lado direito da igualdade (3.14) obtemos
2
1
2
2
v
v21 mv
2
1mv
2
1dvvmU
2
1
(3.15)
Definindo a energia cinética de uma partícula de massa m como
2mv2
1T (3.16)
e aplicando em (3.15), obtemos o princípio do trabalho e energia para uma
partícula P, da seguinte forma
1221 TTU (3.17)
ou
2211 TUT (3.18)

25
3.3 PRINCÍPIO DO TRABALHO E ENERGIA: SISTEMAS DE PARTÍCULAS
Vamos estender o princípio do trabalho e energia para um sistema de
partículas. Seja um sistema formado por n partículas, cada uma de massa mi.
Aplicando (3.18) para a i-ésima partícula
i2i21i1 TUT )( (3.19)
Somando para todas a i partículas do sistema resulta:
i2i21i1 TUT )( (3.20)
ou, de forma compacta
2211 TUT (3.21)
onde
2
i1i1 vm2
1T é a energia cinética do sistema no instante 1
2
i2i2 vm2
1T é a energia cinética do sistema no instante 2
i2
i1
i2
i1iiii21 ddU
r
r
r
rrFrf é o trabalho do sistema.
Para a definição do trabalho do sistema entre as posições iniciais e finais, foi usada
a notação f para forças internas e F para forças externas ao sistema. Deve-se notar
que em determinadas condições, o trabalho total das forças internas é nulo: isto
ocorre quando todas as partículas têm igual deslocamento (translação) e as
conexões entre elas são rígidas. Estas condições são satisfeitas, por exemplo, para
o caso de corpos rígidos em translação.
Observamos que a equação (3.21) é igual a (3.18), mas cada um de seus
termos tem definição diferente, como visto nesta seção.
26
3.4 POTÊNCIA E EFICIÊNCIA
A potência é definida com a taxa de variação do trabalho por unidade de
tempo, ou seja
dt
dUP (3.22)
Aplicando (3.1) em (3.22), resulta
vFrF
dt
dP (3.23)
Um conceito prático utilizado em engenharia é o da eficiência, às vezes
denominado rendimento. Define-se, num sistema mecânico, a eficiência mecânica
como o quociente entre a potência de saída e a potência de entrada.
E
S
P
P (3.24)
A potência de entrada, em geral, é aquela fornecida pelos motores que acionam o
sistema. Podem ter várias fontes de energia, sendo a energia elétrica muito
utilizada. A potência de saída é a responsável pelo trabalho que se deseja realizar
com o sistema. Se o sistema for considerado ideal, este quociente é igual a 1, pois
não há perda de energia. Entretanto, nos sistemas reais a eficiência é sempre menor
que 1, pois sempre há perda de energia mecânica ao se realizar um trabalho.
3.5 FORÇAS CONSERVATIVAS E ENERGIA POTENCIAL
Chamamos forças conservativas aquelas cujo trabalho realizado entre duas
posições não depende da trajetória do movimento. Para a aplicação neste curso
vamos destacar duas forças conservativas: a força peso e a força de mola. Como
visto anteriormente em (3.6), o trabalho da força peso é dado por
yWyyWU 2121 )( (3.25)

27
Definimos a energia potencial gravitacional como
yWVg (3.26)
onde y é a posição vertical da partícula em relação a um plano referencial
escolhido arbitrariamente como plano de potencial nulo. Neste caso, podemos
calcular o trabalho realizado pela força peso, qualquer que seja a trajetória entre as
posições 1 e 2, através de
g2g121 VVU (3.27)
De forma semelhante, como visto em (3.9), o trabalho da força de mola é dado por
)( 2
2
2
121 xxk2
1U (3.28)
Definimos a energia potencial elástica como
2
e xk2
1V (3.29)
onde x é a deformação mola em relação à posição de força nula. Neste caso,
podemos calcular o trabalho realizado pela força de mola, qualquer que seja a
trajetória entre as posições 1 e 2, através de
e2e121 VVU (3.30)
Podemos definir a energia potencial como
eg VVV (3.31)
Há outras forças conservativas, geradas por campos elétricos, energia
química, etc. Entretanto para os estudos que faremos neste texto, a definição dada

28
em (3.31) é suficiente. Portanto o trabalho total realizado por forças conservativas
pode ser calculado por
2121 VVU (3.32)
3.6 PRINCÍPIO DO TRABALHO E ENERGIA: SISTEMAS CONSERVATIVOS
O princípio do trabalho e energia, dado em (3.18), pode ser modificado
quando todas as forças atuantes numa partícula são forças conservativas. Neste
caso, combinando (3.18) e (3.32), obtemos
2211 TVVT (3.33)
ou
2211 VTVT (3.34)
Esta igualdade é conhecida como a conservação da energia mecânica. È uma forma
particular do princípio do trabalho e energia para sistemas conservativos. Nestes
casos a soma das energias cinética e potencial é constante ao longo do tempo, ou
0dt
VTdCVT
)(ou (3.35)
onde C é uma constante. Observe-se que, para casos gerais onde há forças
conservativas e forças não conservativas, o princípio geral dado por (3.18) pode
ser escrito como
22
nc
2111 VTUVT (3.36)
onde nc
21U é a soma de todos os trabalhos das forças não conservativas.
Para um sistema de partículas sujeito apenas à atuação de forças
conservativas, uma extensão de (3.34) pode ser escrita como
2211 VTVT (3.37)
29
CAPÍTULO 4
DINÂMICA DA PARTÍCULA: IMPULSO E QUANTIDADE DE MOVIMENTO
Neste capítulo será analisada a lei de Newton na forma de integral no
domínio do tempo, aplicada ao movimento de partículas. Define-se o conceito de
impulso e quantidade de movimento e através da integração da lei de Newton ao
longo do tempo podemos relacionar as forças aplicadas num intervalo de tempo
com a variação da velocidade vetorial.
4.1 PRINCÍPIO DO IMPULSO E DA QUANTIDADE DE MOVIMENTO LINEAR
Vamos partir da formulação diferencial da lei de Newton
dt
dmmF
va (4.1)
Tomando a diferencial de (4.1) e integrando entre os instantes de tempo t1 e t2,
sendo v1 e v2 as velocidades da massa m nestes instantes, obtemos
2
1
2
1
dmdtt
t
v
vvF (4.2)
ou
12
t
tmmdt
2
1
vvF (4.3)
Vamos definir o impulso de uma força num intervalo de tempo como

30
2
1
t
t21 dtFI (4.4)
Esta grandeza é vetorial e a sua intensidade corresponde à área da curva mostrada
na Figura 4.1, entre os instantes t1 e t2.
Figura 4.1 - Impulso de uma força F.
A quantidade de movimento linear de uma partícula, ou simplesmente quantidade de
movimento, é definida por
vL m (4.5)
onde v é a velocidade da partícula de massa m. A partir dessas definições o
princípio do impulso e da quantidade de movimento (4.3) pode ser escrito como
2211 LIL (4.6)
Em palavras, o quantidade de movimento linear num instante t2 é igual à quantidade
de movimento linear num instante t1 mais a soma dos impulsos de todas as forças
aplicadas à partícula entre estes instantes.
Este princípio está escrito na sua forma vetorial. Em componentes
retangulares, a forma (4.3) é dada por
t1 t
F
A
t2

31
2x
t
tx1x vmdtFvm
2
1
2y
t
ty1y vmdtFvm
2
1
(4.7)
2z
t
tz1z vmdtFvm
2
1
4.2 PRINCÍPIO DO IMPULSO E DA QUANTIDADE DE MOVIMENTO LINEAR
SISTEMA DE PARTÍCULAS
Seja um sistema de partículas, mostrado na Figura 4.2, onde Fi é a resultante
externa na partícula i e fi representa uma força interna.
Figura 4.2 - Sistemas de partículas.
O princípio do impulso de da quantidade de movimento aplicado à i-ésima partícula
do sistema é dado
i2i
t
ti
t
tii1i mdtdtm
2
1
2
1
vfFv (4.8)
Somando para todas a i partículas do sistema resulta:
i2i
t
ti
t
tii1i mdtdtm
2
1
2
1
vfFv (4.9)
Sabendo que a soma de todos os impulsos das forças internas fi é nula, obtemos
y
z
x
Fi
G
rG
ri
fi
32
i2i
t
tii1i mdtm
2
1
vFv (4.10)
Lembrando a definição do centro de massa G de um sistema de partículas,
iiG mm rr (4.10)
onde
imm é a massa total do sistema
rG é a posição do centro de massa do sistema
ri é a posição da i-ésima massa do sistema
Através da derivação no tempo de (4.10) obtemos
iiG mm vv (4.11)
onde
vG é a velocidade do centro de massa do sistema
vi é a velocidade da i-ésima massa do sistema
Portanto o princípio do impulso e da quantidade de movimento (4.10) pode ser
escrito como
2G
t
ti1G mdtm
2
1
vFv (4.12)
4.3 CONSERVAÇÃO DA QUANTIDADE DE MOVIMENTO LINEAR
Se a resultante de todas as forças externas que atuam numa partícula de
massa m for nula, então a quantidade de movimento se conserva, ou seja
Cvv 21 mm (4.13)
33
e, portanto, a velocidade da partícula é constante. Por outro lado, se num sistema
de partículas não há forças externas atuantes, ou a soma dos impulsos das forças
externas é nula, podemos escrever:
Cvv 2G1G mm (4.14)
e, portanto, a velocidade do centro de massa G do sistema se mantém constante.
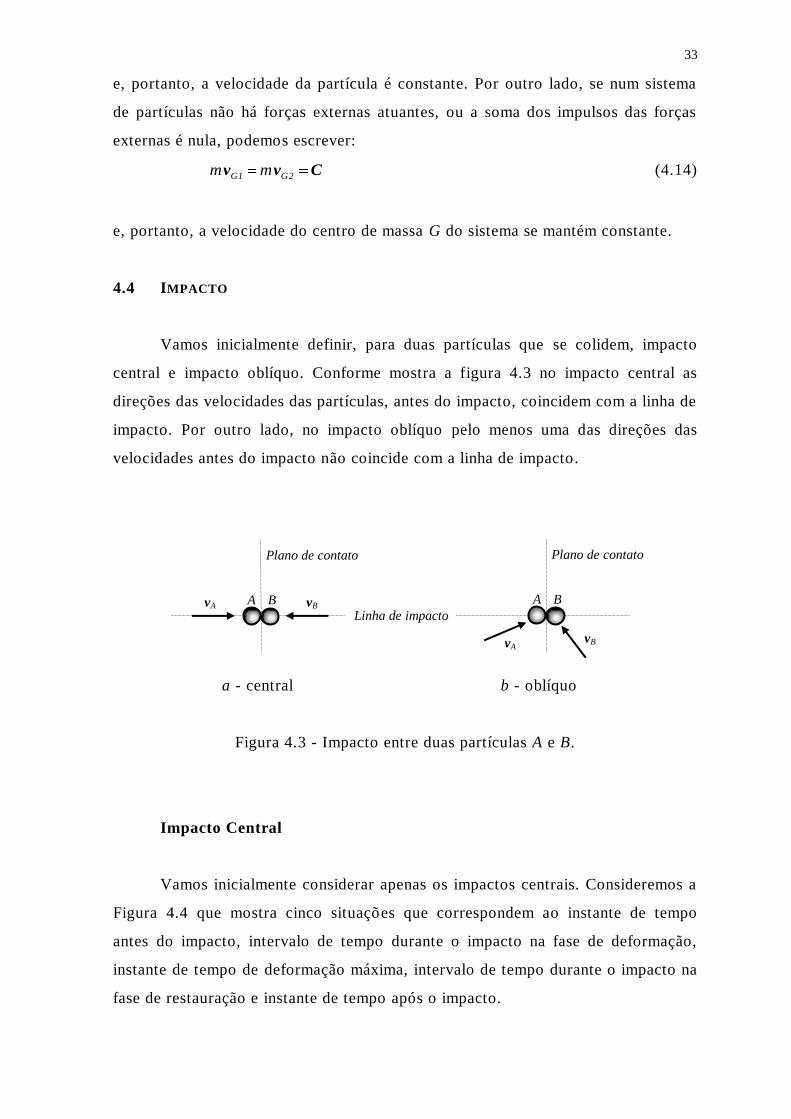
4.4 IMPACTO
Vamos inicialmente definir, para duas partículas que se colidem, impacto
central e impacto oblíquo. Conforme mostra a figura 4.3 no impacto central as
direções das velocidades das partículas, antes do impacto, coincidem com a linha de
impacto. Por outro lado, no impacto oblíquo pelo menos uma das direções das
velocidades antes do impacto não coincide com a linha de impacto.
a - central b - oblíquo
Figura 4.3 - Impacto entre duas partículas A e B.
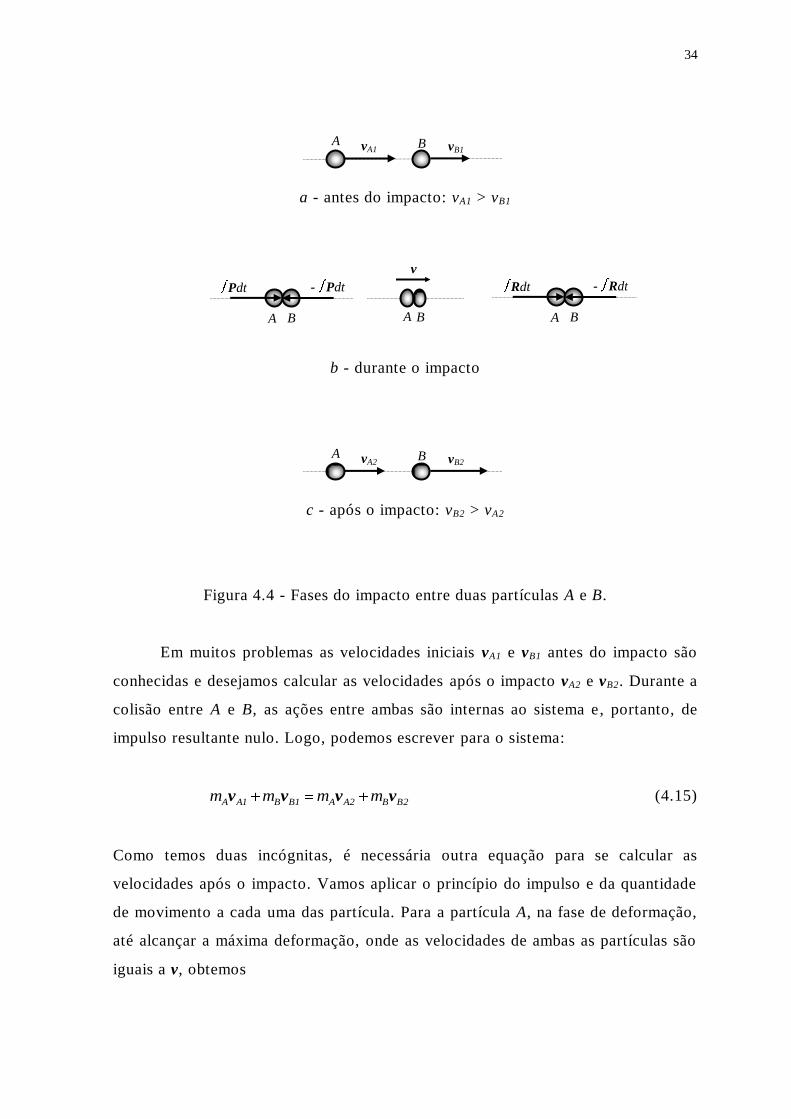
Impacto Central
Vamos inicialmente considerar apenas os impactos centrais. Consideremos a
Figura 4.4 que mostra cinco situações que correspondem ao instante de tempo
antes do impacto, intervalo de tempo durante o impacto na fase de deformação,
instante de tempo de deformação máxima, intervalo de tempo durante o impacto na
fase de restauração e instante de tempo após o impacto.
Plano de contato
A
vA vB
B
Linha de impacto
Plano de contato
A vA vB B
34
a - antes do impacto: vA1 > vB1
b - durante o impacto
c - após o impacto: vB2 > vA2
Figura 4.4 - Fases do impacto entre duas partículas A e B.
Em muitos problemas as velocidades iniciais vA1 e vB1 antes do impacto são
conhecidas e desejamos calcular as velocidades após o impacto vA2 e vB2. Durante a
colisão entre A e B, as ações entre ambas são internas ao sistema e, portanto, de
impulso resultante nulo. Logo, podemos escrever para o sistema:
2BB2AA1BB1AA mmmm vvvv (4.15)
Como temos duas incógnitas, é necessária outra equação para se calcular as
velocidades após o impacto. Vamos aplicar o princípio do impulso e da quantidade
de movimento a cada uma das partícula. Para a partícula A, na fase de deformação,
até alcançar a máxima deformação, onde as velocidades de ambas as partículas são
iguais a v, obtemos
A vA1 vB1 B
A
Rdt
B
- Rdt
A B
v
A
Pdt
B
- Pdt
A vA2 vB2 B
35
vmdtPvm A1AA (4.16)
e na fase de restituição
2AAA vmdtRvm (4.17)
De (4.16) e (4.17) obtemos:
vv
vv
vmvm
vmvm
dtP
dtR
1A
2A
A1AA
2AAA (4.18)
Para a partícula B, na fase de deformação, até alcançar a máxima deformação, onde
as velocidades de ambas as partículas são iguais a v, obtemos
vmdtPvm B1BB (4.19)
e na fase de restituição
2BBB vmdtRvm (4.20)
De (4.19) e (4.20) obtemos:
1B
2B
1BBB
B2BB
vv
vv
vmvm
vmvm
dtP
dtR (4.21)
Define-se coeficiente de restituição e ao quociente entre os impulsos da força de
restituição R e da força de deformação P
dtP
dtRe (4.22)
36
Assim, podemos escrever a equação (4.18) e a (4.21), respectivamente, como
vv
vve
1A
2A (4.23)
e
1B
2B
vv
vve (4.24)
Eliminando v em (4.23) e substituindo em (4.24) obtemos finalmente
1B1A
2A2B
vv
vve (4.25)
ou
2A2B1B1A vvvve )( (4.26)
Assim temos um sistema de duas equações, (4.15) e (4.25) ou (4.26), que permite
calcular as velocidades das partículas A e B após o impacto, dadas as respectivas
velocidades antes do impacto e o coeficiente de restituição e. São considerados
dois casos limites para este coeficiente.
Impacto elástico: não há perda de energia e os impulsos de deformação e de
restauração são iguais.
dtPdtR e = 1
Impacto plástico: não há impulso de restituição e as partículas se movem
juntas após o impacto. Neste caso basta usar a equação (4.15) fazendo vB2 = vA2 .
0dtR e = 0
Em situações reais, ocorre freqüentemente que apenas parte da energia se
perde em deformação. Nestes casos tem-se um impacto parcialmente elástico.
dtPdtR 0 < e < 1
37
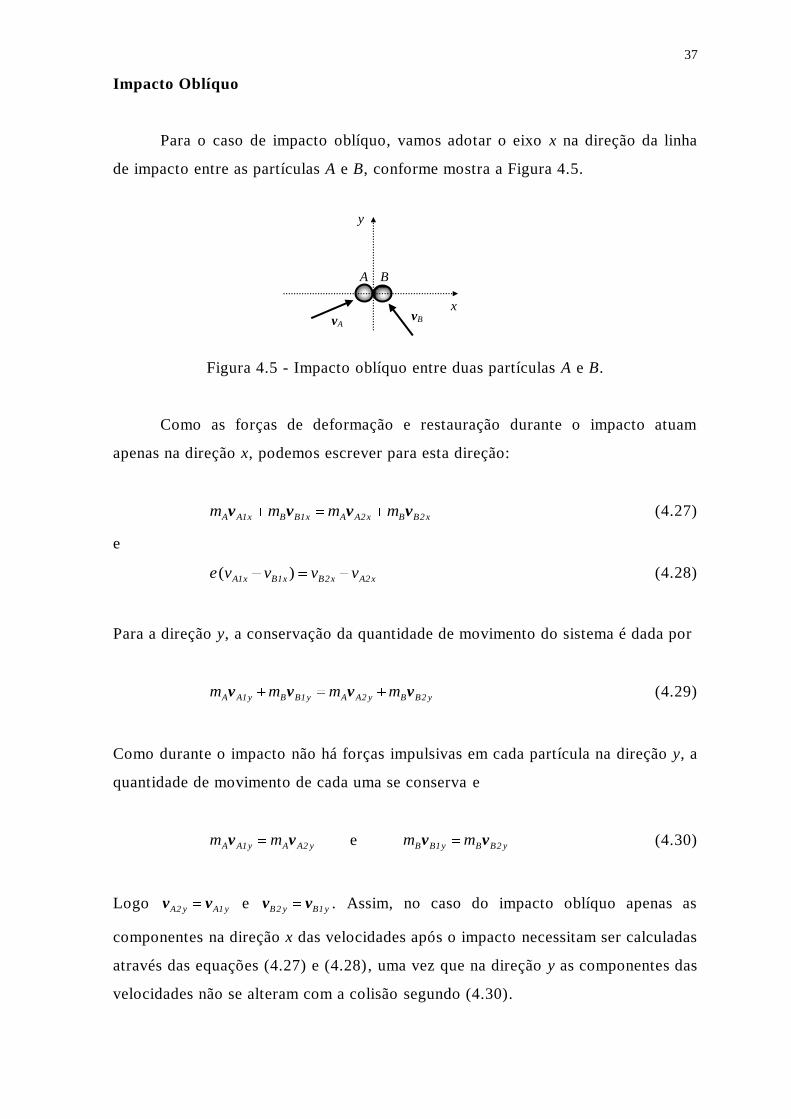
Impacto Oblíquo
Para o caso de impacto oblíquo, vamos adotar o eixo x na direção da linha
de impacto entre as partículas A e B, conforme mostra a Figura 4.5.
Figura 4.5 - Impacto oblíquo entre duas partículas A e B.
Como as forças de deformação e restauração durante o impacto atuam
apenas na direção x, podemos escrever para esta direção:
x2BBx2AAx1BBx1AA mmmm vvvv (4.27)
e
x2Ax2Bx1Bx1A vvvve )( (4.28)
Para a direção y, a conservação da quantidade de movimento do sistema é dada por
y2BBy2AAy1BBy1AA mmmm vvvv (4.29)
Como durante o impacto não há forças impulsivas em cada partícula na direção y, a
quantidade de movimento de cada uma se conserva e
y2AAy1AA mm vv e y2BBy1BB mm vv (4.30)
Logo y1Ay2A vv e y1By2B vv . Assim, no caso do impacto oblíquo apenas as
componentes na direção x das velocidades após o impacto necessitam ser calculadas
através das equações (4.27) e (4.28), uma vez que na direção y as componentes das
velocidades não se alteram com a colisão segundo (4.30).
y
A
vA vB
B
x

38
4.5 QUANTIDADE DE MOVIMENTO ANGULAR
A quantidade de movimento angular de uma partícula em relação a um ponto
O é o momento da quantidade de movimento em relação a este ponto. A partir
desta definição escreve-se
vrH mO (4.31)
Figura 4.6 - Quantidade de movimento angular HO.
A partir da definição (4.31), o vetor quantidade de movimento angular HO tem
direção perpendicular ao plano que contém os vetores posição r e velocidade v e o
seu sentido é dado pela regra da mão direita. Em componentes retangulares pode
ser calculado através de
zyx
zyxO
mvmvmv
rrr
kji
H (4.32)
onde
)( yzzyOx vrvrmH
)( zxxzOy vrvrmH (4.33)
)( xyyxOz vrvrmH
Observe que no caso do movimento no plano xy, rz = 0 e vz = 0. Portanto obtemos
HOx = 0 e HOy = 0. Assim temos no caso plano
y
z
x
HO
P
r
mv
O

39
)( xyyxOzO vrvrmHH (4.34)
Para interpretação geométrica, vamos considerar o caso de um movimento no plano
xy, conforme mostrado na Figura 4.7.
Figura 4.7 - Quantidade de movimento angular no movimento plano.
Podemos observar que o módulo de HO pode ser obtido por
))(( mvdsenmO vrH (4.35)
4.6 QUANTIDADE DE MOVIMENTO ANGULAR E MOMENTO DE UMA FORÇA
Vamos escrever o momento resultante de todas as forças que atuam numa
partícula em relação a um ponto O. Da definição de estática
FrMO (4.36)
Pela segunda lei de Newton
arM mO (4.37)
Agora vamos derivar no tempo a quantidade de movimento angular desta partícula
em relação ao ponto O. Derivando (4.31), obtemos
dt
dmm
dt
d
dt
d O vrv
rH (4.38)
y
x
z
x HO
P d
mv
O

40
A primeira parcela de (4.38) é igual a zero , pois os vetores v e mv são paralelos.
Portanto (4.38) é igual a
arH
mdt
d O (4.39)
Comparando (4.37) e (4.39), resulta que
dt
d OO
HM (4.37)
4.7 PRINCÍPIO DO IMPULSO E DA QUANTIDADE DE MOVIMENTO ANGULAR
A partir de (4.37) podemos escrever
OO ddt HM (4.38)
Integrando (4.38) entre os instantes de tempo t1 e t2
1O2O
t
tO
t
tO
2
1
2
1
ddt HHHM (4.39)
Portanto, o princípio do impulso e da quantidade de movimento angular para uma
partícula é dado por
2O
t
tO1O
2
1
dt HMH (4.40)
Definindo o impulso angular AO de uma força F em relação a um ponto O, entre os
instantes de tempo t1 e t2, como
2
1
2
1
t
tO
t
t21O dtdt MFrA )( (4.41)
podemos escrever (4.40) como
41
2O21O1O HAH (4.42)
Quando a soma de todos os impulsos angulares atuantes numa partícula é
nula, temos
2O1O HH (4.43)
que é a equação da conservação da quantidade de movimento angular.
Seja definido um sistema de partículas. Para cada uma dessas partículas
podemos aplicar a equação (4.40). A soma de todas estas equações é igual a
2O
t
tO1O
2
1
dt HMH (4.44)
onde
)( iiO mvrH é a soma das quantidades de movimento angular de
todas as partículas em determinado instante, aplicada nos instante t1 e t2, e
2
1
2
1
t
tEii
t
tO dtdt )( FrM é a soma dos impulsos angulares de todas as
forças externas aplicadas às partículas, uma vez que o impulso angular resultante de
todas as forças internas é nulo.
Quando a soma de todos os impulsos angulares atuantes neste sistema é
nula, temos que
2O1O HH (4.45)
que é a equação da conservação da quantidade de movimento angular de um
sistema de partículas.
42
CAPÍTULO 5
CINEMÁTICA DO MOVIMENTO PLANO DE
CORPOS RÍGIDOS
O estudo da dinâmica do corpo rígido pode ser feito inicialmente tomando
aplicações de engenharia onde o movimento é plano. Neste capítulo vamos analisar
as equações da cinemática do movimento plano. Este estudo é feito a fim de
encontrar a relação entre as posições, velocidades e acelerações de dois pontos de
um mesmo corpo rígido.
5.1 MOVIMENTO DE UM CORPO RÍGIDO
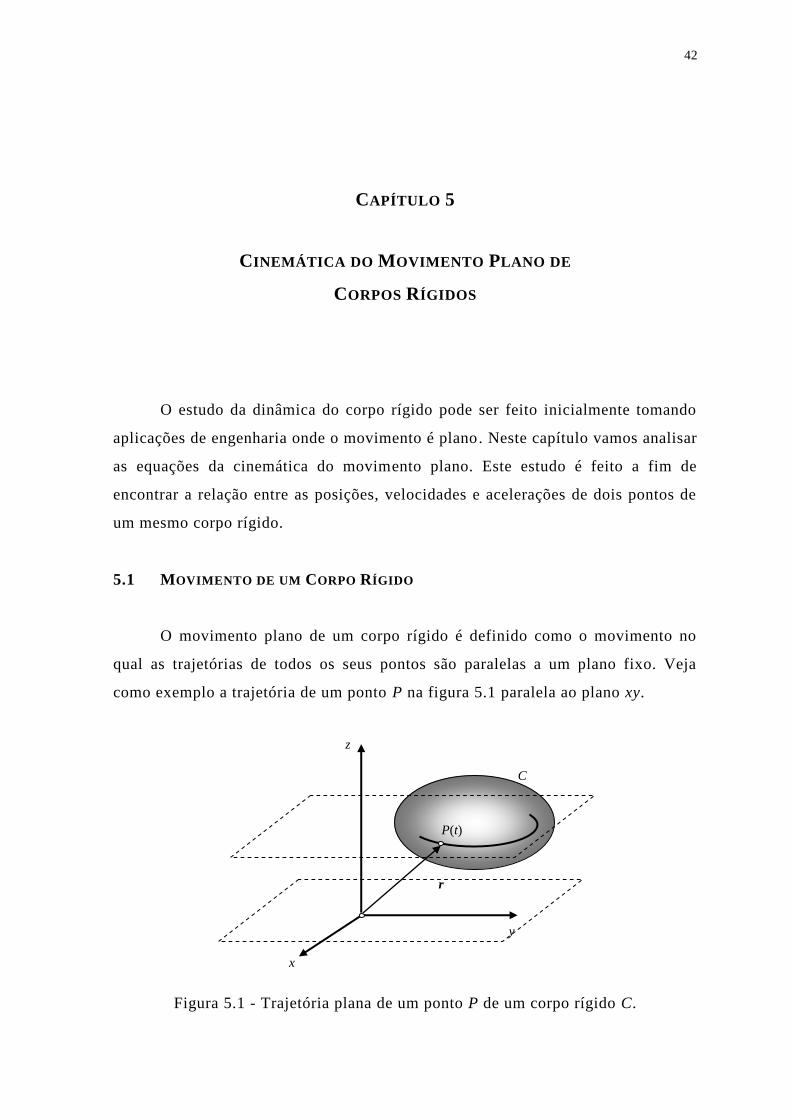
O movimento plano de um corpo rígido é definido como o movimento no
qual as trajetórias de todos os seus pontos são paralelas a um plano fixo. Veja
como exemplo a trajetória de um ponto P na figura 5.1 paralela ao plano xy.
Figura 5.1 - Trajetória plana de um ponto P de um corpo rígido C.
z
x
y
r
P(t)
C
43
Há dois casos particulares de movimentos planos: a translação e a rotação
em torno de um eixo fixo. O movimento geral plano pode ser decomposto numa
translação mais uma rotação.
Na translação uma linha qualquer do corpo rígido se mantém paralela em
relação à sua posição inicial, em qualquer instante. Neste caso se as trajetórias de
todos os pontos são retilíneas, o movimento é de translação retilínea. Se as
trajetórias de todos os pontos são curvilíneas e equidistantes, o movimento é de
translação curvilínea.
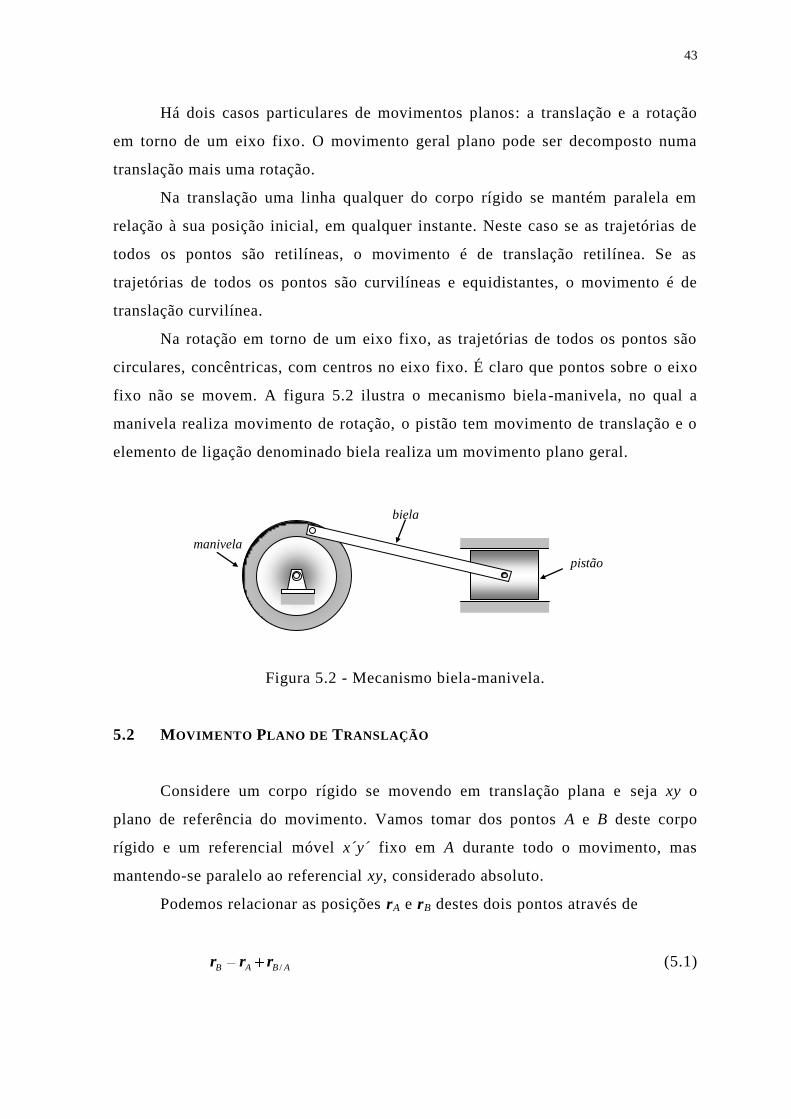
Na rotação em torno de um eixo fixo, as trajetórias de todos os pontos são
circulares, concêntricas, com centros no eixo fixo. É claro que pontos sobre o eixo
fixo não se movem. A figura 5.2 ilustra o mecanismo biela-manivela, no qual a
manivela realiza movimento de rotação, o pistão tem movimento de translação e o
elemento de ligação denominado biela realiza um movimento plano geral.
Figura 5.2 - Mecanismo biela-manivela.
5.2 MOVIMENTO PLANO DE TRANSLAÇÃO
Considere um corpo rígido se movendo em translação plana e seja xy o
plano de referência do movimento. Vamos tomar dos pontos A e B deste corpo
rígido e um referencial móvel x´y´ fixo em A durante todo o movimento, mas
mantendo-se paralelo ao referencial xy, considerado absoluto.
Podemos relacionar as posições rA e rB destes dois pontos através de
ABAB /rrr (5.1)
biela
manivela
pistão

44
onde ABAB rrr / é o vetor posição de B em relação a A. Esta é uma forma
simplificada ou compacta de indicar este vetor. De fato, este vetor é a posição de B
em relação a um referencial móvel x´y´ fixo no ponto A.
Figura 5.3 - Vetores velocidade de uma partícula P.
Derivando a (5.1) podemos relacionar as velocidades entre os pontos A e B
ABAB /vvv (5.2)
onde ABAB vvv / corresponde velocidade relativa de B em relação a A. Aqui vale
também a observação feita acima, uma vez que a velocidade vB/A é de fato a
velocidade de B em relação ao referencial móvel x´y´. Vamos analisar a derivada
do vetor posição relativa. Seja
jir yxAB / (5.3)
Tomando a derivada de (5.3), obtemos
dt
dy
dt
dx
dt
yd
dt
xd
dt
d ABAB
jiji
rv /
/ (5.4)
Sendo o corpo rígido, na translação o vetor rB/A é constante e portanto x´ e y´
também são constantes e suas derivadas no tempo são nulas. Como o referencial
móvel foi escolhido tal que i´=i e j´=j, então
y
x
y´
rA
rB
rB/A
A
B
C
x´
45
0dt
d ABAB
//
rv (5.5)
e
AB vv (5.6)
Derivando (5.6) obtemos a relação entre as acelerações dos pontos A e B
AB aa (5.7)
Pode-se concluir a partir de (5.6) e (5.7) que todos os pontos de um corpo rígido
em translação possuem velocidades iguais e acelerações iguais em cada instante.
Este resultado permite utilizar todas as equações desenvolvidas na cinemática e
dinâmica da partícula para corpos rígidos em translação. Podemos afirmar que as
equações da mecânica da partícula e do corpo rígido em translação são as mesmas.
5.3 MOVIMENTO PLANO DE ROTAÇÃO EM TORNO DE UM EIXO FIXO
Vamos considerar o eixo fixo do movimento de rotação plana aqui estudado
paralelo ao eixo z do sistema de referência utilizado, passando por um ponto A.
Inicialmente vamos definir grandezas angulares deste movimento. Pontos
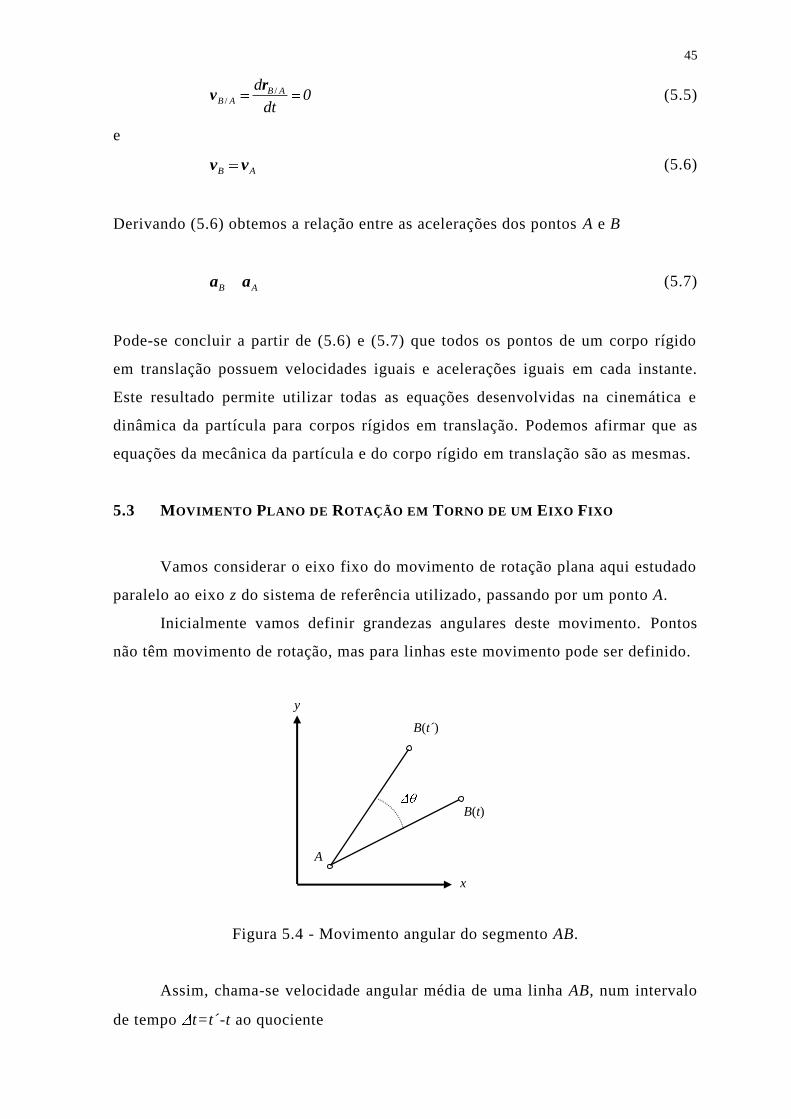
não têm movimento de rotação, mas para linhas este movimento pode ser definido.
Figura 5.4 - Movimento angular do segmento AB.
Assim, chama-se velocidade angular média de uma linha AB, num intervalo
de tempo t=t´-t ao quociente
y
x
A
B(t)
B(t´)
46
t
m (5.8)
Passando ao limite (5.8), obtém a velocidade angular instantânea dada por
dt
d (5.9)
Derivando (5.9), obtemos a aceleração angular dada por
2
2
dt
d
dt
d (5.10)
No movimento plano de rotação de corpos rígidos todos os segmentos de reta,
paralelos ao plano de referência, desenvolvem movimentos angulares iguais.
Assim, as velocidades angulares de todos os segmentos do corpo rígido são iguais.
Portanto, a velocidade angular é uma característica do corpo rígido ou parâmetro
do movimento do corpo rígido. O mesmo vale para a aceleração angular. A
velocidade angular no movimento plano de rotação pode ser definida
vetorialmente, usando a regra da mão direita, da seguinte forma:
kω (5.11)
onde o plano xy é o plano do movimento. Vamos calcular a velocidade de um
ponto B qualquer do corpo rígido. Tomando a equação (5.2) e considerando A no
eixo de rotação, temos que
ABABAB // vvvv (5.12)
No movimento plano de rotação o ponto B realiza uma trajetória circular em torno
do eixo fixo z’, paralelo a z, que passa por A no plano do movimento de xy.
Portanto, da cinemática da partícula, obtemos:
47
rrdt
d
dt
rd
dt
dsAB
)(/v (5.13)
onde ABr /r é raio da trajetória circular de B. Vetorialmente, o mesmo resultado
poderia ser obtido através do produto vetorial:
ABABB // rωvv (5.14)
onde
kω
ABAB r // ur
e portanto
tABABB r urωvv //
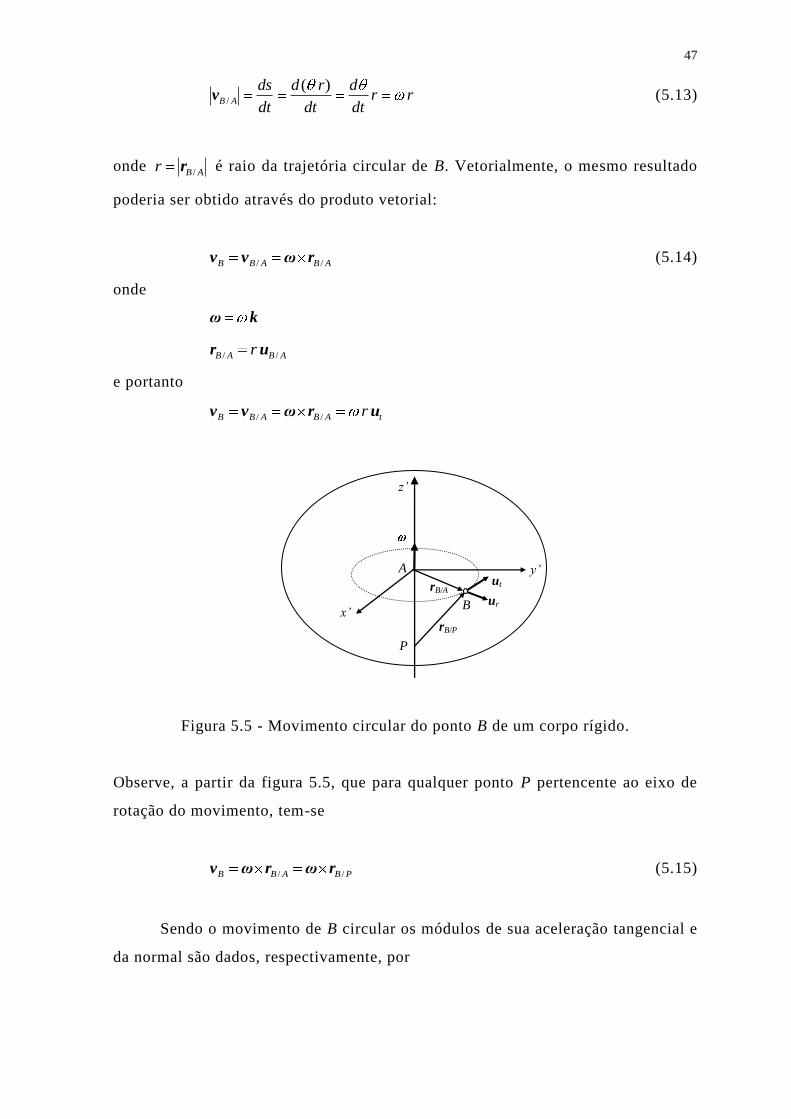
Figura 5.5 - Movimento circular do ponto B de um corpo rígido.
Observe, a partir da figura 5.5, que para qualquer ponto P pertencente ao eixo de
rotação do movimento, tem-se
PBABB // rωrωv (5.15)
Sendo o movimento de B circular os módulos de sua aceleração tangencial e
da normal são dados, respectivamente, por
ur
ut rB/A
B
A
x’
y’
z’
rB/P
P

48
rrdt
d
dt
rd
dt
sda
2
2
2
2
Bt
)( (5.16)
e
rr
r
r
va 2
222
Bn (5.17)
Vetorialmente, obtemos a aceleração derivando no tempo a equação (5.14)
dt
d
dt
d ABABABB
///
rωr
ωaa (5.18)
ou
)( ///// ABABABABABB rωrαvωrαaa (5.19)
Sendo
kω
kα
nABAB rr uur //
obtêm-se as acelerações tangencial e normal de B, respectivamente,
tABB rt
urαa / (5.20)
e
n
2
AB
2
ABnB rr uurωωa // )( (5.21)
5.4 MOVIMENTO PLANO DE UM CORPO RÍGIDO
O movimento plano geral pode ser decomposto em dois movimentos, sendo
um de translação e outro de rotação. Vamos tomar o ponto A como referência e
seja B outro ponto qualquer do corpo rígido. A relação entre as posições rA e rB
desses dois pontos do corpo rígido é dada por
ABAB /rrr (5.22)
A figura 5.6 mostra estes vetores, o referencial fixo xy e o móvel x’y’, preso em A
mantendo-se em qualquer instante paralelo ao referencial fixo.

49
Figura 5.6 - Vetores posição dos pontos A e B.
Derivando a (5.22) podemos relacionar as velocidades entre os pontos A e B
ABAB /vvv (5.23)
onde ABAB vvv / corresponde velocidade relativa de B em relação a A. Aqui vale
também a observação feita anteriormente, uma vez que a velocidade vB/A é de fato a
velocidade de B em relação ao referencial móvel x´y´. Vamos analisar a derivada
do vetor posição relativa. Seja
dt
d ABAB
//
rv (5.24)
O movimento de B neste referencial x´y´ é circular. Conforme mostrado no item
anterior, (5.24) resulta igual a
ABAB
ABdt
d/
// rω
rv (5.25)
Portanto, a relação entre as velocidades de A e B dada por (5.23) é igual a
ABAB /rωvv (5.26)
y
x
y´
rA
rB
rB/A
A
B
C
x´

50
Lembrando que os eixos dos referenciais são sempre paralelos, todos os
vetores podem ser escritos no referencial fixo xy.
Para se obter a relação entre as acelerações dos pontos A e B, derivamos a
equação (5.26), ou seja,
dt
d
dt
d
dt
d
dt
d ABAB
AB //
rωr
ωvv (5.27)
A partir dos resultados obtidos no item anterior, podemos escrever
)( // ABABAB rωωrαaa (5.28)
onde
AB
ABABAB r
t
/
///
v
vrαa é a aceleração tangencial relativa
AB
2
ABAB rn /// )( urωωa é a aceleração normal relativa
Assim, é possível obter a posição, a velocidade e a aceleração de um ponto B
qualquer de um corpo rígido a partir dos correspondentes vetores de um ponto A,
cujo movimento seja dado. As equações (5.22), (5.26) e (5.28) expressam estas
relações para um movimento plano qualquer. Podem ser aplicadas, é óbvio, para os
casos particulares de translação, onde os vetores velocidade angular e aceleração
angular são nulos, e de rotação em torno de um eixo fixo que passe por A, onde os
vetores velocidade e aceleração deste ponto são nulos.
5.5 MOVIMENTO RELATIVO ENTRE DOIS CORPOS DISTINTOS
Seja um corpo rígido C que contenha um ponto A. Seja B um ponto qualquer
de outro corpo rígido. A relação entre as posições rA e rB desses dois pontos dos
corpos rígidos distintos é dada por
ABAB /rrr (5.29)
51
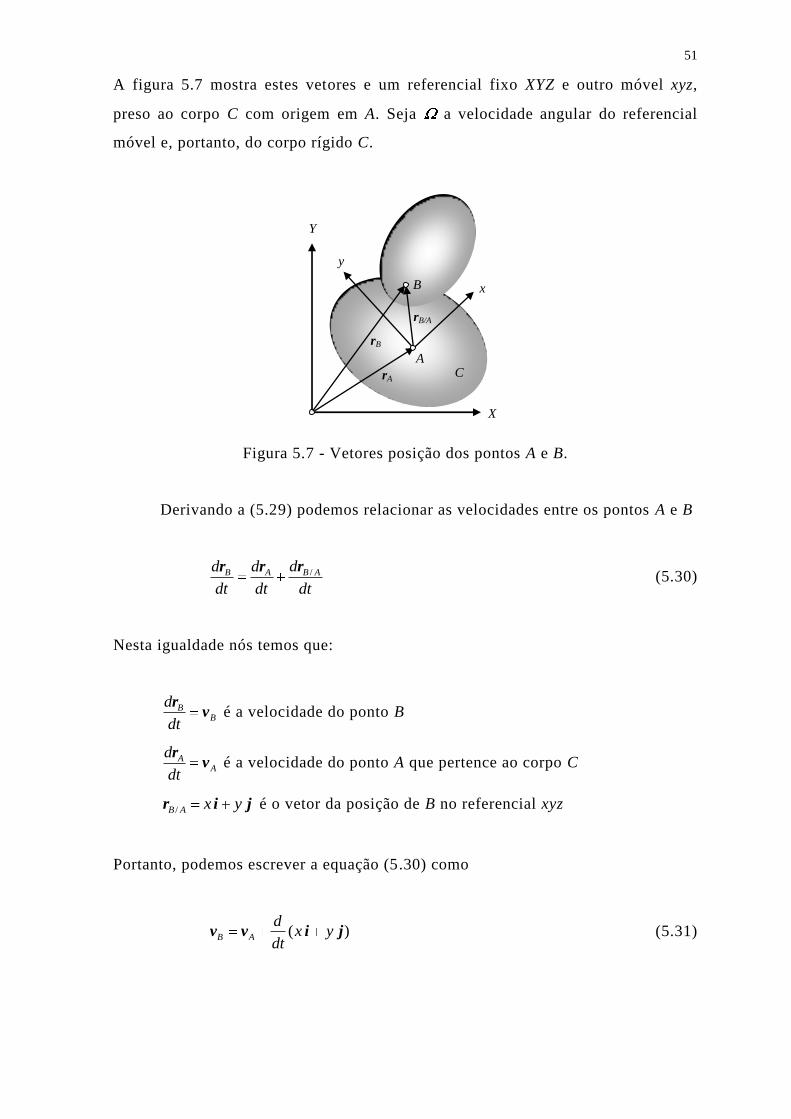
A figura 5.7 mostra estes vetores e um referencial fixo XYZ e outro móvel xyz,
preso ao corpo C com origem em A. Seja a velocidade angular do referencial
móvel e, portanto, do corpo rígido C.
Figura 5.7 - Vetores posição dos pontos A e B.
Derivando a (5.29) podemos relacionar as velocidades entre os pontos A e B
dt
d
dt
d
dt
d ABAB /rrr (5.30)
Nesta igualdade nós temos que:
BB
dt
dv
r é a velocidade do ponto B
AA
dt
dv
r é a velocidade do ponto A que pertence ao corpo C
jir yxAB / é o vetor da posição de B no referencial xyz
Portanto, podemos escrever a equação (5.30) como
)( jivv yxdt
dAB (5.31)
Y
X
y
rA
rB
rB/A
A
B
C
x

52
Como B se move em relação ao corpo C e, portanto, em relação ao referencial
móvel xyz, a equação (5.31) é igual a
jiji
vvdt
dy
dt
dx
dt
dy
dt
dxAB (5.32)
Vamos analisar as derivadas dos vetores unitários i e j. Estes vetores possuem
módulo unitário, mas tem a mesma velocidade angular do corpo rígido C. Assim
podemos escrever:
tdt
d
0t
iilim (5.33)
A figura 5.8 ilustra a obtenção do vetor i para um intervalo de tempo t .
Consideremos que neste intervalo de tempo a variação angular em torno do eixo x
seja dada por . Então
iiii
000t0tΩ
ttdt
dlimlimlimlim (5.34)
Figura 5.8 - Vetor unitário i nos instantes t e t+ t.
Da figura 5.8, temos que
ji
ii 22
00
sin
limlim (5.35)
Y
X
i(t)
i
i(t+ t)

53
Logo
iΩji
dt
d (5.36)
De forma análoga pode-se obter
jΩij
dt
d (5.37)
Aplicando os resultados obtidos em (5.36) e (5.37) na equação (5.32) obtém-se
jijΩiΩvvdt
dy
dt
dxyxAB )()( (5.38)
ou
jijiΩvvdt
dy
dt
dxyxAB )( (5.39)
Finalmente, observando que as duas últimas parcelas de (5.39) representam a
velocidade do ponto B em relação ao referencial preso ao corpo rígido C, podemos
escrever
xyzBABAB // vrΩvv (5.40)
onde se definem
ABA /rΩv velocidade de arraste
xyzB /v velocidade de B relativa ao referencial móvel xyz
A relação entre as acelerações pos pontos A e B pode ser obtida derivando a
equação (5.40), resultando
dt
d
dt
d
dt
d xyzBABABAB
///
vrΩr
Ωaa (5.41)
54
Conforme mostrado anteriormente
xyzBABAB
dt
d//
/ vrΩr
(5.42)
e
xyzBxyzB
xyzB
dt
d//
/avΩ
v (5.43)
Substituindo (5.42) e (5.43) em (5.41), obtemos
xyzBxyzBABABAB 2dt
d//// )( avΩrΩΩr
Ωaa (5.44)
onde se definem
)( // ABABAdt
drΩΩr
Ωa aceleração de arraste
xyzB2 /vΩ aceleração de Coriolis ou complementar
xyzB /a aceleração de B relativa ao referencial móvel a xyz
Portanto, as equações (5.40) e (5.44) relacionam as velocidades e as
acelerações de dois pontos A e B, pertencentes a corpos rígidos distintos. Embora
tenham sido deduzidas para o movimento plano, se aplicam igualmente para
movimentos espaciais.

55
CAPÍTULO 6
DINÂMICA DO MOVIMENTO PLANO DE
CORPOS RÍGIDOS
O estudo da dinâmica do corpo rígido pode ser feito inicialmente tomando
aplicações de engenharia onde o movimento é plano. Neste capítulo vamos analisar
as equações da dinâmica do corpo rígido, no movimento plano. Este estudo é feito
a fim de encontrar a relação entre a aceleração do centro de massa e as forças
aplicadas ao corpo, e entre a aceleração angular e os momentos destas forças .
6.1 EQUAÇÕES DO MOVIMENTO DO CENTRO DE MASSA
Seja um corpo rígido C, de massa m e centro de massa G, realizando um
movimento plano paralelo ao plano de referência xy, figura 6.1.
Figura 6.1 - Forças numa partícula i de um corpo rígido C.
x
y
ri
mi
C
G
rG
fji
Fi
56
Várias forças externas atuam neste corpo em diferentes pontos. Vamos
identificar a força externa resultante que atua na partícula i, de massa mi, como Fi
e a força interna que a partícula j faz sobre i como fij. Escrevendo a lei de Newton
para a massa mi obtemos
ii
j
jii m afF (6.1)
Se somarmos a equação de movimento aplicada a todas as partículas deste corpo
rígido, obteremos
i
ii
i j
ji
i
i m afF (6.2)
A relação que define a posição do centro de massa G deste corpo rígido é dada por
G
i
ii mm rr (6.3)
Derivando, obtemos a seguinte relação para a velocidade do centro de massa
G
i
ii mm vv (6.4)
e, derivando novamente obtemos para a aceleração
G
i
ii mm aa (6.5)
onde mmi
i é a massa do corpo rígido. Aplicando (6.5) em (6.2) obtemos
G
i j
ji
i
i mafF (6.6)
Finalmente, lembrando que a soma de todas as forças internas em um corpo rígido
é nula

57
G
i
iRE maFF (6.7)
Assim, esta é a forma da lei dos movimentos de Newton para o movimento
do centro de massa de corpos rígidos. É semelhante à forma original enunciada
para partículas de dimensões desprezíveis, relacionando a força resultante de todas
as forças externas aplicadas ao corpo rígido e a aceleração de seu centro de massa.
6.2 EQUAÇÕES PARA O MOVIMENTO ANGULAR DO CORPO RÍGIDO
Para o conhecimento da posição angular de qualquer corpo rígido durante
movimentos planos, devemos tomar o momento das forças na partícula i em
relação a um ponto qualquer P. Sem perda de generalidade, escolhemos este ponto
como a origem do sistema de referência, como mostra a figura 6.2.
Figura 6.2 - Momento de todas as forças atuantes numa partícula i.
Assim, a partir da equação (6.1) temos
iii
j
jiiii m arfrFr (6.8)
Vamos somar esta equação aplicada a todos os pontos do corpo rígido,
i
iii
i j
jii
i
ii m arfrFr (6.9)
x
y
ri
mi
C
G
rG
fji
Fi
P

58
A segunda parcela do lado esquerdo da equação (6.9), referente ao momento de
todas as forças internas que atuam num corpo rígido, é nula. Portanto, obtemos
i
iii
i
ii m arFr (6.10)
Das equações da cinemática de um corpo rígido podemos escrever
)( iiPi rωωrαaa (6.11)
Para movimentos planos tal que kα é a aceleração angular do corpo rígido C e
kω é a velocidade angular do corpo rígido, a equação (6.11) pode ser escrita
como
ii
2
piiPi rr uuaa (6.12)
onde
iu é o vetor unitário da direção de ri , sendo iii rur , e
piu é o vetor unitário da direção perpendicular à ri conforme o produto
vetorial irα para aceleração angular positiva.
Figura 6.2 - Vetores unitários iu e piu .
Aplicando a equação (6.12) em (6.10)
x
y
ri
mi
C
G
rG
P
upi ui

59
i
ii
2
piiPii
i
ii rrm )( uuarFr (6.13)
ou
i
2
ii
i
Pii
i
ii rmm karFr (6.14)
pois ii
2
iiiii
2
ii rmrrm uuur é nulo. A relação da posição do centro de massa
dada por (6.3) pode ser substituída na equação (6.14), resultando
i
2
iiPG
i
ii rmm karFr (6.15)
Lembrando que
P
vol
2
i
2
ii Idmrrm é momento de inércia do corpo rígido C em relação ao
eixo z que passa pelo ponto P e
i
P
i
ii M kFr é momento de todas as forças externas que atuam no
corpo rígido C, em relação ao ponto P, a equação (6.15) será dada por:
kark PPG
i
P ImM (6.16)
Aplicando a equação da translação de momentos de inércia entre os eixos
paralelos que passam por P e por G, ambos na direção z, obtemos
2
GGP rmII (6.17)
Da cinemática escrevemos a relação entre as acelerações dos pontos G e P
G
2
GPG rrαaa (6.18)
ou
G
2
GGP rrαaa (6.19)
Aplicando (6.17) e (6.19) na equação (6.16) obtemos

60
kk
rrrαrark
2
GG
G
2
GGGGG
i
P
rmI
mmmM )( (6.20)
A segunda parcela do lado direito de (6.20) é dada por
krαr2
PGGG rmm /)( (6.21)
e, sendo nula a terceira parcela, resulta
kark GGG
i
P ImM (6.22)
Esta é a equação da dinâmica do movimento plano de um corpo rígido que
relaciona o momento de todas as forças externas e a aceleração angular. Há dois
casos particulares de interesse prático.
i - Se o ponto P coincidir com o centro de massa G, temos rG = 0 e
kk G
i
G IM (6.23)
ou
G
i
G IM (6.24)
ii - Se o ponto P estiver no eixo de rotação, temos aP = 0. Aplicando na
equação geral dada em (6.16) obtemos
kk P
i
P IM (6.25)
ou
P
i
P IM (6.26)

61
6.3 EQUAÇÕES DO MOVIMENTO - COORDENADAS RETANGULARES
Para o movimento plano de um corpo rígido temos, portanto, três equações
escalares. Em coordenadas retangulares são dadas por:
Gx
i
ix amF (6.27)
Gy
i
iy amF (6.28)
e
G
i
G IM (6.29)
A equação (6.29) pode ser substituída por
P
i
P IM (6.30)
onde P é um ponto do eixo de rotação, ou de aceleração nula. Se quisermos utilizar
um ponto P qualquer, da equação geral (6.22), obtemos
GGxGGyG
i
P IamyamxM (6.31)
sendo jir GGG yx e jia GyGxG aa .
Figura 6.3 - “Momentos” das componentes de Gma .
x
y
C
G
rG
P
maGx
yG
xG
maGy

62
6.4 EQUAÇÕES DO MOVIMENTO - DIREÇÕES TANGENCIAL E NORMAL
Para o movimento plano onde o centro de massa de um corpo rígido realiza
uma trajetória curvilínea, freqüentemente é conveniente escrever as equações
(6.27) e (6.28) nas componentes tangencial e normal, da seguinte forma
Gt
i
it amF (6.32)
e
Gn
i
in amF (6.33)
sendo nGntGtG aa uua .
Figura 6.4 – Direções: tangencial e normal.
A equação de momentos utilizada nestes casos é dada por
G
i
G IM (6.34)
para movimentos quaisquer ou
P
i
P IM (6.35)
para movimentos de rotação pura em torno do eixo, tomando P neste eixo.
x
y
C
G
un
P
trajetória de G
ut
O
centro de curvatura

63
CAPÍTULO 7
DINÂMICA DO MOVIMENTO PLANO DE
CORPOS RÍGIDOS - TRABALHO E ENERGIA
Neste capítulo será analisada a lei de Newton apresentada na forma de uma
integral sobre o deslocamento. Esta forma se baseia nos conceitos de trabalho e
energia cinética do corpo rígido. Aplicam-se os conceitos de trabalho e de energia
cinética em condições gerais e no final estuda-se o caso particular de sistemas
conservativos.
7.1 ENERGIA CINÉTICA DE UM CORPO RÍGIDO
Seja um corpo rígido C, de massa m e um elemento de massa dm num ponto
qualquer deste corpo.
Figura 7.1 - Velocidades de um ponto qualquer e do ponto Q.
Usando a definição de energia cinética de uma partícula, podemos escrever a
energia cinética do corpo C através da integral
x
y
r
dm
C
vP
v
P

64
m
2 dmv2
1T (7.1)
Se desejarmos expressar esta equação em função da velocidade de um ponto P
particular, escolhido como origem de referencial xy, podemos relacionar as
velocidades entre um ponto qualquer e o ponto P através de
rωvv P (7.2)
onde é a velocidade angular de C. Assim, para o movimento plano
)( jikjiv yxωvv PyPx (7.3)
ou
jiv )()( xvyv PyPx (7.4)
Elevando ao quadrado (7.4) obtemos
2
Py
2
Px
2 xvyvv )()(vv (7.5)
Aplicando (7.5) em (7.1) obtemos
m
2
Py
2
Px dmxvyv2
1T ])()[( (7.6)
ou
m
22
m
Py
m
Px
m
2
P dmr2
1dmyvdmyvdmv
2
1T (7.7)
lembrando que 2
Py
2
Px
2
P vvv e 222 yxr . Usando as definições de centro de
massa G de um corpo rígido C, dadas por
m
G dmxm
1x e
m
G dmym
1y (7.8)
65
e a definição do momento de inércia do corpo rígido C em relação ao eixo z que
passa por P,
m
2
m
22
P dmrdmyxI )( (7.9)
podemos escrever a equação (7.7) como
2
PGPyGPx
2
P I2
1mxvmyvvm
2
1T (7.10)
Esta é a equação geral que permite calcular a energia cinética do corpo rígido C a
partir da velocidade de um ponto P e de sua velocidade angular. Se escolhermos o
ponto P coincidente com o centro de massa G, a equação (7.10) toma uma forma
mais simples
2
G
2
G I2
1vm
2
1T (7.11)
uma vez que neste caso 0xG e 0yG .
As expressões (7.10) e (7.11) permitem calcular a energia cinética de um
corpo rígido que realiza um movimento qualquer no plano xy. Há dois casos de
movimentos particulares que tem estas expressões simplificadas além de (7.11).
No movimento de translação, a velocidade angular do corpo é sempre igual
a zero. Logo
2
Gvm2
1T (7.12)
No caso do movimento de rotação plana em torno de um eixo fixo z que passa por
um ponto O (a velocidade 0vO ), a equação (7.10) fica igual a
2
OI2
1T (7.13)
66
7.2 TRABALHO DE UMA FORÇA
O conceito de trabalho de uma força que atua num corpo rígido, como
definido no Capítulo 3, referente à Mecânica da partícula, está relacionado ao
movimento do ponto onde está aplicada a força. Conforme visto, o trabalho
elementar dU realizado por uma força F é dado por
rF ddU (7.14)
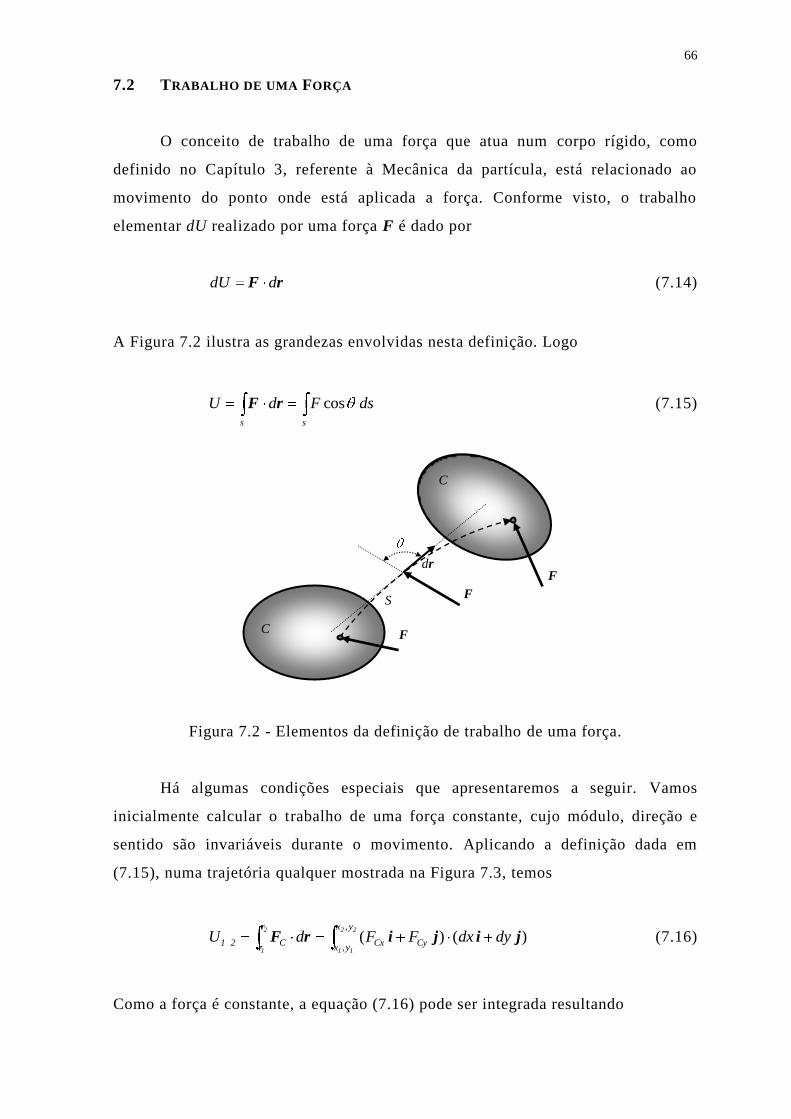
A Figura 7.2 ilustra as grandezas envolvidas nesta definição. Logo
ss
dsFdU cosrF (7.15)
Figura 7.2 - Elementos da definição de trabalho de uma força.
Há algumas condições especiais que apresentaremos a seguir. Vamos
inicialmente calcular o trabalho de uma força constante, cujo módulo, direção e
sentido são invariáveis durante o movimento. Aplicando a definição dada em
(7.15), numa trajetória qualquer mostrada na Figura 7.3, temos
22
11
2
1
yx
yxCyCxC21 dydxFFdU
,
,)()( jijirF
r
r (7.16)
Como a força é constante, a equação (7.16) pode ser integrada resultando
S
F
F
F
C
C
dr

67
yFxFdyFdxFU CyCx
yx
yxCyCx21
22
11
,
, (7.17)
onde 12 xxx e
12 yyy .
Figura 7.3 - Trabalho de uma força constante.
Analogamente, podemos calcular o trabalho da força peso W, sendo y a direção
vertical, através de
22
11
2
1
yx
yx21 dydxWdU
,
,)()( jijrF
r
r (7.18)
ou
yWyyWWdyU 12
y
y21
2
1
)( (7.19)
O trabalho da força de uma mola linear aplicada num ponto P de um corpo
rígido é obtido a partir de:
2
1
s
sm21 dU rF (7.20)
O modelo linear da força de mola é dado por
xkFm (7.21)
S
FC
C
FC
FC
x
y
x1 x2
y1
y2
C

68
onde k é a constante elástica da mola e x é a sua deformação tomada a partir de sua
posição não deformada, ver Figura 7.4. Assim, podemos escrever
)( 2
1
2
2
s
s21 xxk
2
1dxxkU
2
1
(7.22)
Figura 7.4 - Trabalho de uma força de mola.
Há algumas forças que não realizam trabalho. Forças que atuam em pontos
fixos do corpo e forças normais ao deslocamento do ponto do corpo não realizam
trabalho. Entre as forças mais usuais em aplicações de engenhar ia estão as reações
em apoios, forças normais das reações de superfícies estacionárias sobre os corpos
rígidos e forças de atrito no rolamento, quando não há escorregamento.
Uma consideração especial deve ser feita sobre o trabalho de um binário,
isto é, o trabalho de um par de forças iguais, paralelas entre si, com sentidos
contrários. É fácil observar que o trabalho de um binário durante o movimento de
translação qualquer de um corpo rígido é nulo, pois os deslocamentos de todos os
pontos são iguais e as forças são contrárias. Assim só há trabalho no movimento de
rotação. Para um binário M, o trabalho elementar é dado por
2211M dddU rFrF (7.23)
Sendo o binário dado pelas forças F1 e F2, onde 21 FFF , e sendo o
movimento de rotação, no qual 21 ddd rrr , pode-se escrever a (7.23) como
x=0 posição da mola não deformada
x1
x2

69
drF2dddUM )()( rFrF (7.24)
Sendo b o braço do binário, temos que d2
bdr . Integrando (7.24) obtém-se
dMd2
bF2U
s
M (7.25)
onde FbM é a intensidade do binário, isto é, seu módulo com o sinal dado pela
orientação do ângulo de rotação , conforme mostra a Figura 7.5.
Figura 7.5 - Orientações para o binário e o ângulo de rotação.
Se o binário for constante de valor M, então
MUM (7.26)
onde 12.
b
F2
F1
d dr1
dr2
x
y
70
7.3 PRINCÍPIO DO TRABALHO E ENERGIA
Conforme demonstrado no Capítulo 3, o princípio do trabalho e energia para
um sistema de partícula, e consequentemente para um corpo rígido qualquer, é
dado por:
2211 TUT (7.27)
onde 1T e
2T são as energias cinéticas (7.11) do corpo rígido nos instantes t1 e t2,
respectivamente, e 21U é a soma dos trabalhos de todas as forças externas
aplicadas neste mesmo corpo.
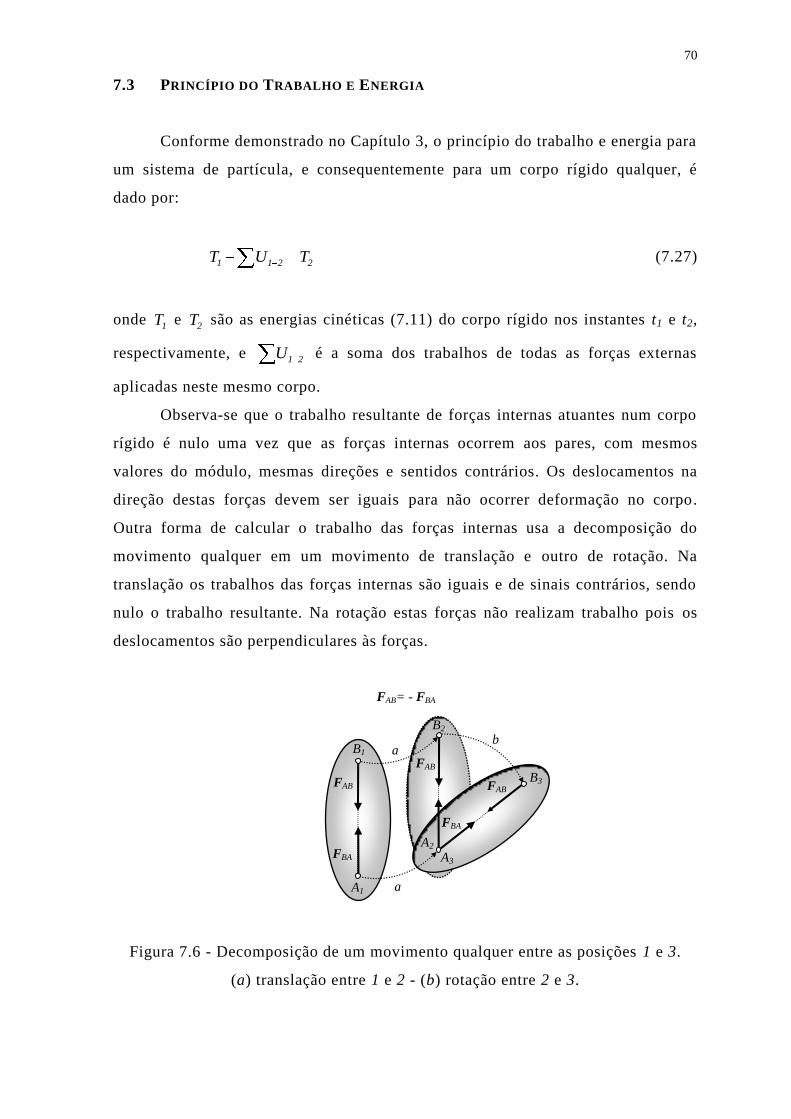
Observa-se que o trabalho resultante de forças internas atuantes num corpo
rígido é nulo uma vez que as forças internas ocorrem aos pares, com mesmos
valores do módulo, mesmas direções e sentidos contrários. Os deslocamentos na
direção destas forças devem ser iguais para não ocorrer deformação no corpo.
Outra forma de calcular o trabalho das forças internas usa a decomposição do
movimento qualquer em um movimento de translação e outro de rotação. Na
translação os trabalhos das forças internas são iguais e de sinais contrários, sendo
nulo o trabalho resultante. Na rotação estas forças não realizam trabalho pois os
deslocamentos são perpendiculares às forças.
Figura 7.6 - Decomposição de um movimento qualquer entre as posições 1 e 3.
(a) translação entre 1 e 2 - (b) rotação entre 2 e 3.
FBA
FAB
FAB
A2
B2
A3
B3
A1
B1
FAB
FBA
FAB= - FBA
a
a
b

71
7.4 PRINCÍPIO DO TRABALHO E ENERGIA: SISTEMAS CONSERVATIVOS
O princípio do trabalho e energia, dado em (7.27), pode ser modificado
quando todas as forças atuantes numa partícula são forças conservativas.
Lembrando que o trabalho total das forças conservativas pode ser dado por
21
C
21 VVU (7.28)
onde 1V e
2V são, respectivamente, as energias potenciais do corpo rígido nos
instantes t1 e t2, e C
21U é a soma dos trabalhos de todas as forças conservativas
aplicadas neste mesmo corpo.
Podemos escrever o princípio (7.27), separando os trabalhos das forças
conservativas e não conservativas como
2
NC
21
C
211 TUUT (7.29)
Aplicando (7.28) em (7.29), obtemos
2
NC
21211 TUVVT (7.30)
ou
22
NC
2111 VTUVT (7.31)
Se o sistema for conservativo, então
2211 VTVT (7.32)
Esta igualdade é conhecida como a conservação da energia mecânica. È uma forma
particular do princípio do trabalho e energia para sistemas conservativos. Nestes
casos a soma da energia cinética e da energia potencial é constante ao longo do
tempo.
72
CAPÍTULO 8
DINÂMICA DO MOVIMENTO PLANO DE CORPOS RÍGIDOS
IMPULSO E QUANTIDADE DE MOVIMENTO
Neste capítulo será analisada a lei de Newton apresentada numa outra forma
integral. Nesta forma integra-se a lei de Newton dada por (6.7) no tempo. Esta
forma se baseia nos conceitos de impulso e quantidade de movimento do corpo
rígido. Ao final deste capítulo estes conceitos são aplicados na teoria de impacto.
8.1 QUANTIDADE DE MOVIMENTO LINEAR DE UM CORPO RÍGIDO
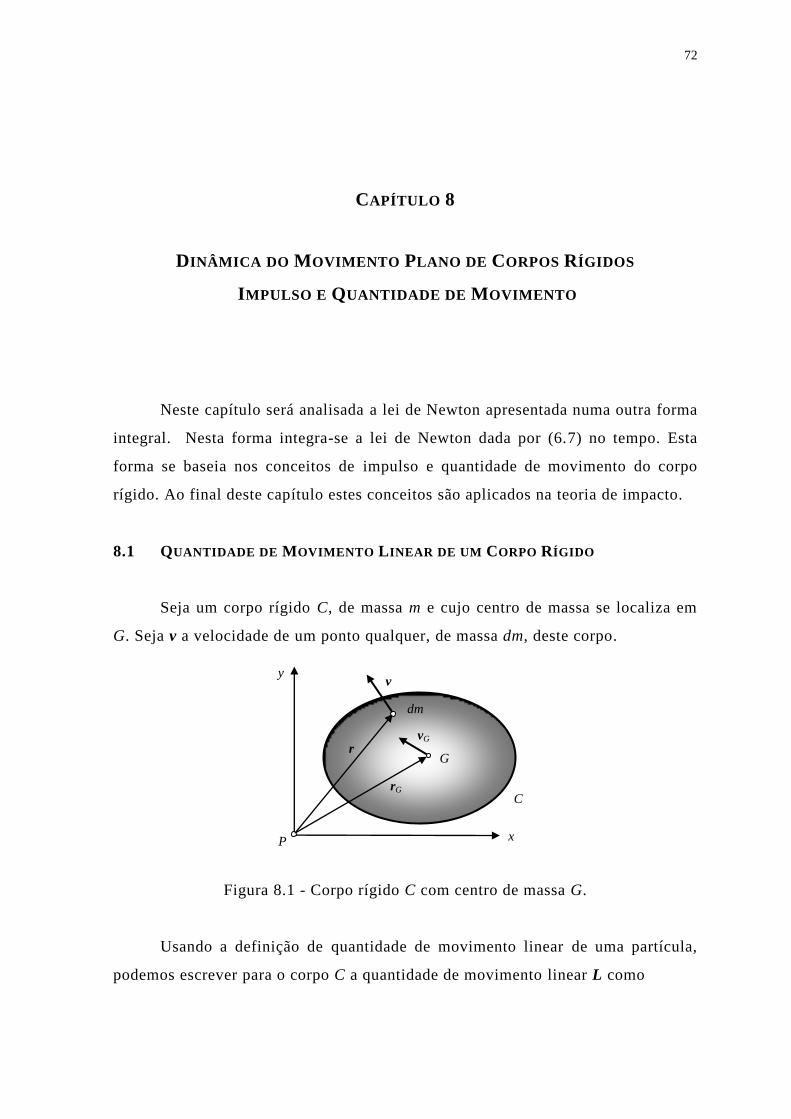
Seja um corpo rígido C, de massa m e cujo centro de massa se localiza em
G. Seja v a velocidade de um ponto qualquer, de massa dm, deste corpo.
Figura 8.1 - Corpo rígido C com centro de massa G.
Usando a definição de quantidade de movimento linear de uma partícula,
podemos escrever para o corpo C a quantidade de movimento linear L como
dm
C
G
v
P
r
x
y
vG
rG

73
m
dmvL (8.1)
A posição do centro de massa G do corpo rígido pode ser obtida através de
m
G dmm
1rr (8.2)
E, portanto,
m
G dmm rr (8.3)
Derivando (8.3), obtém-se
m
G dmm vv (8.4)
Substituindo (8.4) em (8.1), obtemos
G
m
vmdmvL (8.5)
A equação (8.5) é a definição da quantidade de movimento linear de um corpo
rígido de massa m, com centro de massa em G. É uma grandeza vetorial obtida
pelo produto da massa do corpo pela velocidade de seu centro de massa.
8.2 QUANTIDADE DE MOVIMENTO ANGULAR DE UM CORPO RÍGIDO
A definição de quantidade de movimento angular de um corpo rígido é dada
a partir da definição feita para a partícula, mostrada no Capítulo 4. Seja um corpo
rígido C, de massa m e cujo centro de massa se localiza em G. Seja v a velocidade
de um ponto qualquer, de massa dm, deste corpo. Pode-se escrever a quantidade de
movimento angular deste elemento de massa em relação ao ponto P tomado na
origem do sistema de referência, ver Figura 8.1, usando a definição (4.31), ou seja

74
dmd P vrH (8.6)
Logo a quantidade de movimento angular do corpo rígido em relação a um ponto P
é dada por
m
P dmvrH (8.7)
Pode-se relacionar a velocidade v do elemento de massa dm com a velocidade do
ponto P, através de
rωvv P (8.8)
Substituindo (8.8) em (8.7), resulta
m
PP dm)( rωvrH (8.9)
ou
mm
PP dmdm )( rωrvrH (8.10)
Para qualquer movimento plano, podemos fazer jir yx e kω ω , e obter
mm
PP dmxyyxdmyx )()()( jijivjiH (8.11)
que é igual a
kHm
22
PxGPyGP dmyxvmyvmx )()( (8.12)
ou, finalmente
kH )( PPxGPyGP Ivmyvmx (8.13)

75
Assim a quantidade de movimento angular no movimento plano é uma grandeza
vetorial na direção de z, podendo escrever na forma escalar sua intensidade
PPxGPyGP IvyvxmH )( (8.14)
Observe-se que se nas seguintes condições:
GP rv , isto é, 0vyvx PxGPyG
ou
0Pv
a equação (8.14) fica na forma simples
PP IH (8.15)
Em geral são conhecidas as propriedades em relação ao centro de massa G.
Neste caso a equação (8.14) pode ser modificada, usando
)( 2
G
2
GGP yxmII (8.16)
e
GGGPGP rωvrωvv / (8.17)
Para o movimento plano, (8.17) pode ser escrita nas componentes
GGyPy
GGxPx
yxvv
yvv (8.18)
Aplicando (8.18) e (8.16) em (8.14), obtém-se
GGxGGyGP IvyvxmH )( (8.19)
Observe-se que quando se calcula a quantidade de movimento angular em relação
ao ponto G, faz-se PG . Neste caso, 0xG e 0yG . Portanto

76
GG IH (8.20)
Assim, para o movimento plano qualquer, as equações que definem as
quantidades de movimento linear e angular de um corpo rígido são:
GG
Gyy
Gxx
IH
vmL
vmL
(8.21)
Observemos que na translação
)( GxGGyGP vyvxmH (8.22)
ou
0HG (8.23)
A definição da quantidade de movimento angular em relação ao centro de
massa G, ver Figura 8.1, é dada por:
m
G dmvrH (8.24)
onde Grrr . Então
m
GG dmvrrH )( (8.25)
ou
m
G
m
G dmdm vrvrH (8.26)
Aplicando a definição (8.7) e a propriedade da em (8.4), obtém-se
GGGP mvrHH (8.27)

77
Observando a Figura 8.2, para o caso do movimento plano, podemos
escrever
GGGP dvmIH (8.28)
onde o sinal da segunda parcela deve ser obtido pelo sinal do produto vetorial.
Figura 8.2 - Posição e velocidade do centro de massa G.
8.3 PRINCÍPIO DO IMPULSO E DA QUANTIDADE DE MOVIMENTO LINEAR
Vamos partir da formulação diferencial da lei de Newton
dt
dmmF G
G
va (8.29)
Realizando a integral de (8.29) entre os instantes de tempo t1 e t2, sendo vG1 e vG2
as velocidades do dentro de massa do corpo nestes instantes, obtemos
2
1
2
1G
t
tdmdt
v
vvF (8.30)
ou
1G2G
t
tmmdt
2
1
vvF (8.31)
Vamos usar a definição de impulso de uma força dada por
C G
mvG
P
rG
x
y
dG

78
2
1
t
t21 dtFI (8.32)
Assim, pode escrever o princípio do impulso e da quantidade de movimento como
2G
t
t1G mdtm
2
1
vFv (8.33)
ou
2211 LIL (8.34)
Há uma forma angular correspondente a este princípio. O princípio da
quantidade de movimento angular pode ser obtido a partir da equação de momentos
da dinâmica
dt
dIM GG (8.35)
Integrando (8.35) entre os instantes t1 e t2, sendo ω1 e ω2 as velocidades angulares
do corpo nestes instantes, obtemos
2G
t
tG1G IdtMI
2
1
(8.36)
Vamos usar a definição de impulso angular dada por
2
1
t
tG21 dtMΩ (8.37)
Assim, podemos escrever o princípio do impulso e da quantidade de movimento
angular como
2G211G HH (8.38)
As equações que serão utilizadas nas aplicações de movimento plano são
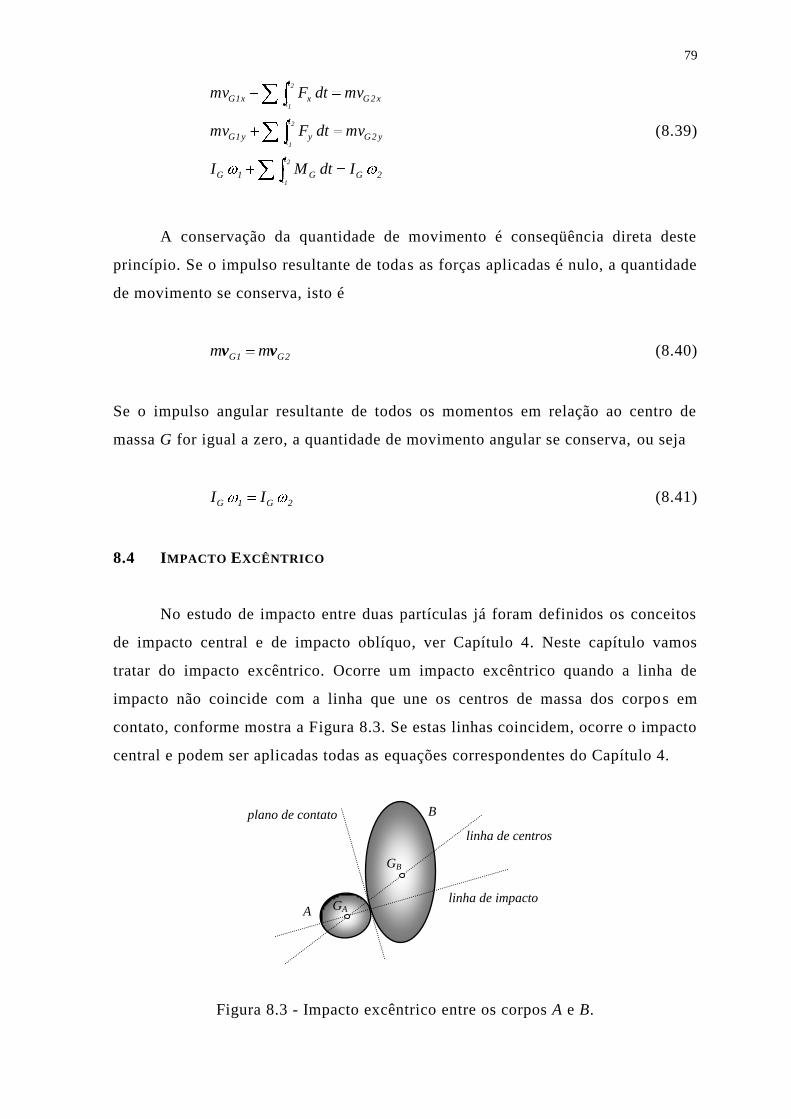
79
2G
t
tG1G
y2G
t
tyy1G
x2G
t
txx1G
IdtMI
mvdtFmv
mvdtFmv
2
1
2
1
2
1
(8.39)
A conservação da quantidade de movimento é conseqüência direta deste
princípio. Se o impulso resultante de todas as forças aplicadas é nulo, a quantidade
de movimento se conserva, isto é
2G1G mm vv (8.40)
Se o impulso angular resultante de todos os momentos em relação ao centro de
massa G for igual a zero, a quantidade de movimento angular se conserva, ou seja
2G1G II (8.41)
8.4 IMPACTO EXCÊNTRICO
No estudo de impacto entre duas partículas já foram definidos os conceitos
de impacto central e de impacto oblíquo, ver Capítulo 4. Neste capítulo vamos
tratar do impacto excêntrico. Ocorre um impacto excêntrico quando a linha de
impacto não coincide com a linha que une os centros de massa dos corpos em
contato, conforme mostra a Figura 8.3. Se estas linhas coincidem, ocorre o impacto
central e podem ser aplicadas todas as equações correspondentes do Capítulo 4.
Figura 8.3 - Impacto excêntrico entre os corpos A e B.
plano de contato
linha de impacto
A
B
GA
GB
linha de centros
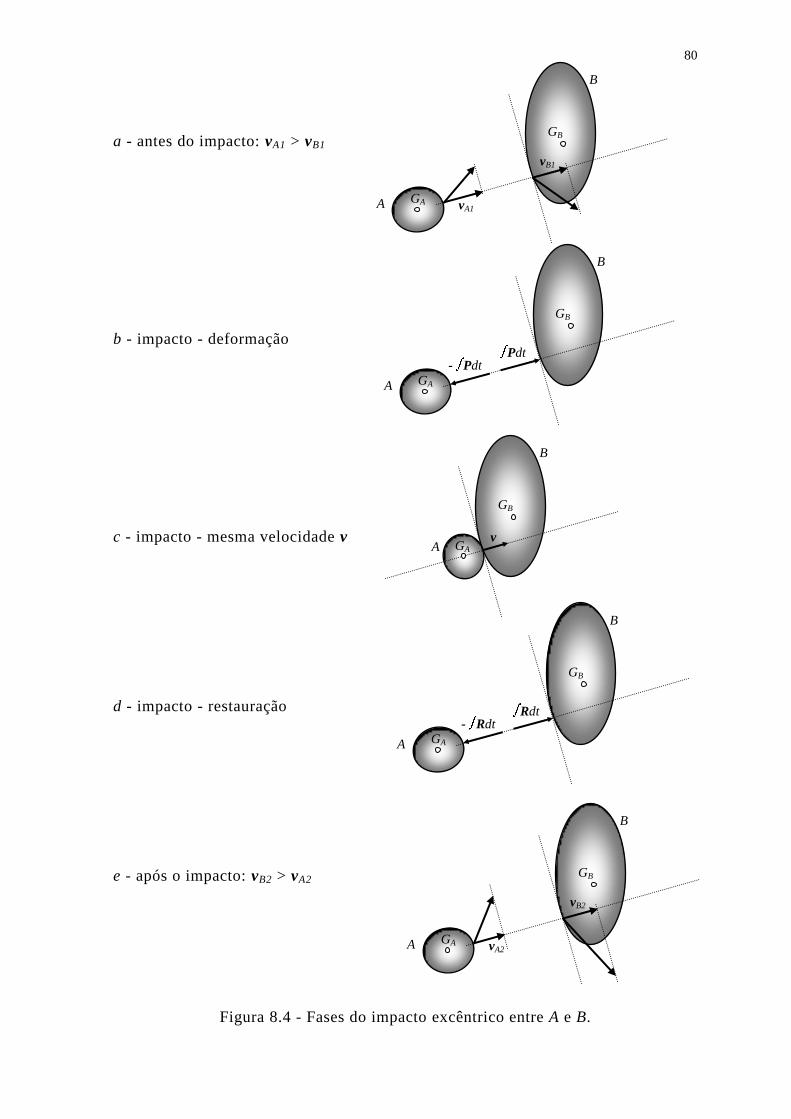
80
a - antes do impacto: vA1 > vB1
b - impacto - deformação
c - impacto - mesma velocidade v
d - impacto - restauração
e - após o impacto: vB2 > vA2
Figura 8.4 - Fases do impacto excêntrico entre A e B.
vA1 A
B
GA
GB
vB1
Pdt - Pdt
A
B
GA
GB
Rdt - Rdt
A
B
GA
GB
A
B
GA
GB
v
vA2 A
B
GA
GB
vB2
81
A Figura 8.4 ilustra as fases: a ocorre imediatamente antes do impacto; b, c
e d ocorrem durante o impacto e após o impacto. As velocidades indicadas são as
projeções das velocidades dos pontos em contato na direção da linha de impacto.
As velocidades vA1 e vB1 são as projeções das velocidades imediatamente antes do
impacto, enquanto que as velocidades vA2 e vB2 são as projeções das velocidades
imediatamente após do impacto. Durante o impacto ocorre a fase de deformação,
passando por um instante em que as projeções das velocidades destes pontos é
igual, cujo valor é indicado por v.
Realizando os mesmos passos mostrados na seção 4.4 do Capítulo 4,
podemos mostrar que
1B1A
2A2B
vv
vve (8.42)
onde e é o coeficiente de restituição, conforme já definido anteriormente.
Utilizando as equações do princípio da quantidade de movimento e a equação
(8.40) é possível determinar as projeções das velocidades após o impacto, dado as
velocidades imediatamente antes deste impacto.
82
CAPÍTULO 9
CINEMÁTICA DO MOVIMENTO ESPACIAL DE
CORPOS RÍGIDOS
O estudo da dinâmica do corpo rígido requer o conhecimento da aceleração
do centro de massa e das características cinemáticas do corpo denominadas
velocidade angular e aceleração angular, em cada instante. Neste capítulo serão
estudadas as propriedades cinemáticas dos movimentos espaciais de corpos rígidos.
Inicialmente são estudados movimentos em torno de um ponto fixo e em seguida
movimentos espaciais quaisquer.
9.1 SOMA DE ROTAÇÕES EM RELAÇÃO A EIXOS NO ESPAÇO
A posição espacial de um corpo rígido pode ser definida por seis
coordenadas independentes, sendo bastante usadas três coordenadas de um ponto
qualquer deste corpo mais três coordenadas angulares. Estas últimas definem o que
chamaremos de atitude do corpo rígido. No caso dos movimentos planos, a atitude
é definida apenas por uma coordenada angular que pode ser tratada de forma
vetorial. No caso espacial deve-se tomar cuidado com as coordenada angulares,
pois a soma de ângulos de rotação em relação a eixos no espaço não obedece à
propriedade da comutatividade da soma vetorial. A Figura 9.1 mostra um exemplo
em duas situações: inicialmente dá-se uma rotação de 90 em torno do eixo x e em
seguida mais 90 em torno do eixo y. Na outra situação, partindo-se da mesma
posição inicial, dá-se inicialmente uma rotação de 90 em torno de y e em seguida
uma rotação de 90 em torno do eixo x. Observa-se que o resultado final é distinto
ao inverter-se a ordem da soma. Assim pode-se concluir no caso espacial que
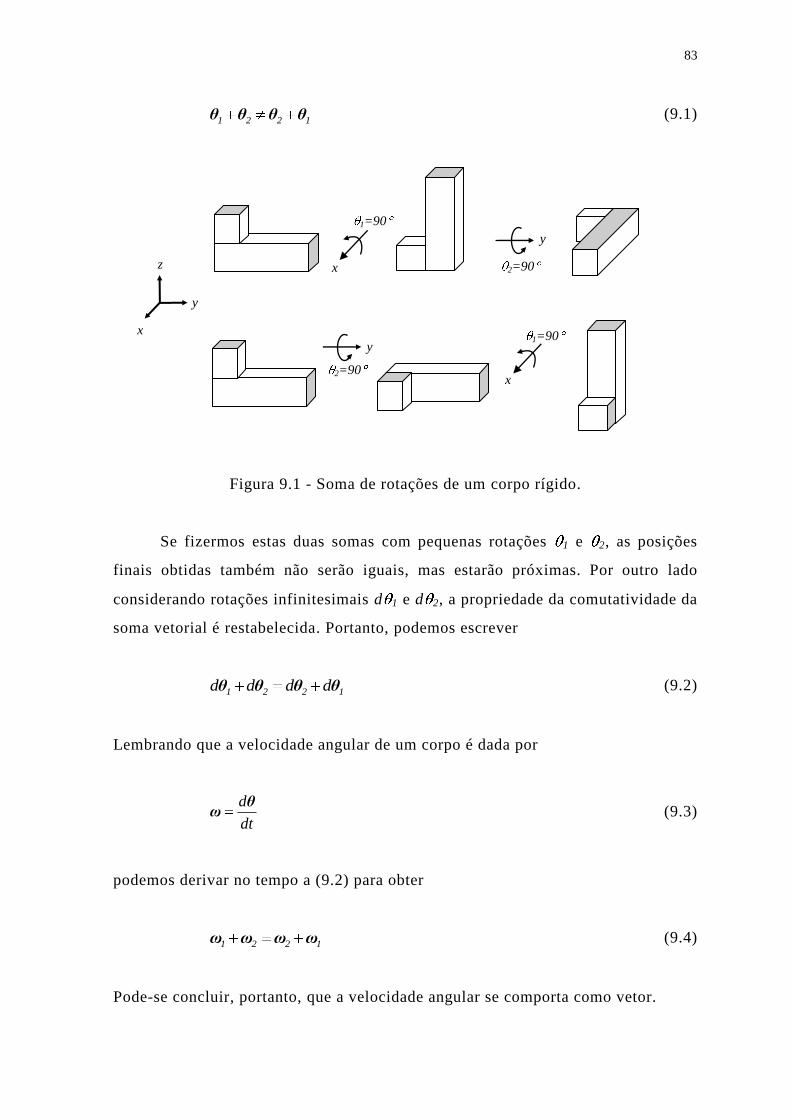
83
1221 θθθθ (9.1)
Figura 9.1 - Soma de rotações de um corpo rígido.
Se fizermos estas duas somas com pequenas rotações 1 e 2, as posições
finais obtidas também não serão iguais, mas estarão próximas. Por outro lado
considerando rotações infinitesimais d 1 e d 2, a propriedade da comutatividade da
soma vetorial é restabelecida. Portanto, podemos escrever
1221 dddd θθθθ (9.2)
Lembrando que a velocidade angular de um corpo é dada por
dt
dθω (9.3)
podemos derivar no tempo a (9.2) para obter
1221 ωωωω (9.4)
Pode-se concluir, portanto, que a velocidade angular se comporta como vetor.
1=90
2=90 x
y
y
x
1=90
2=90
z
x
y
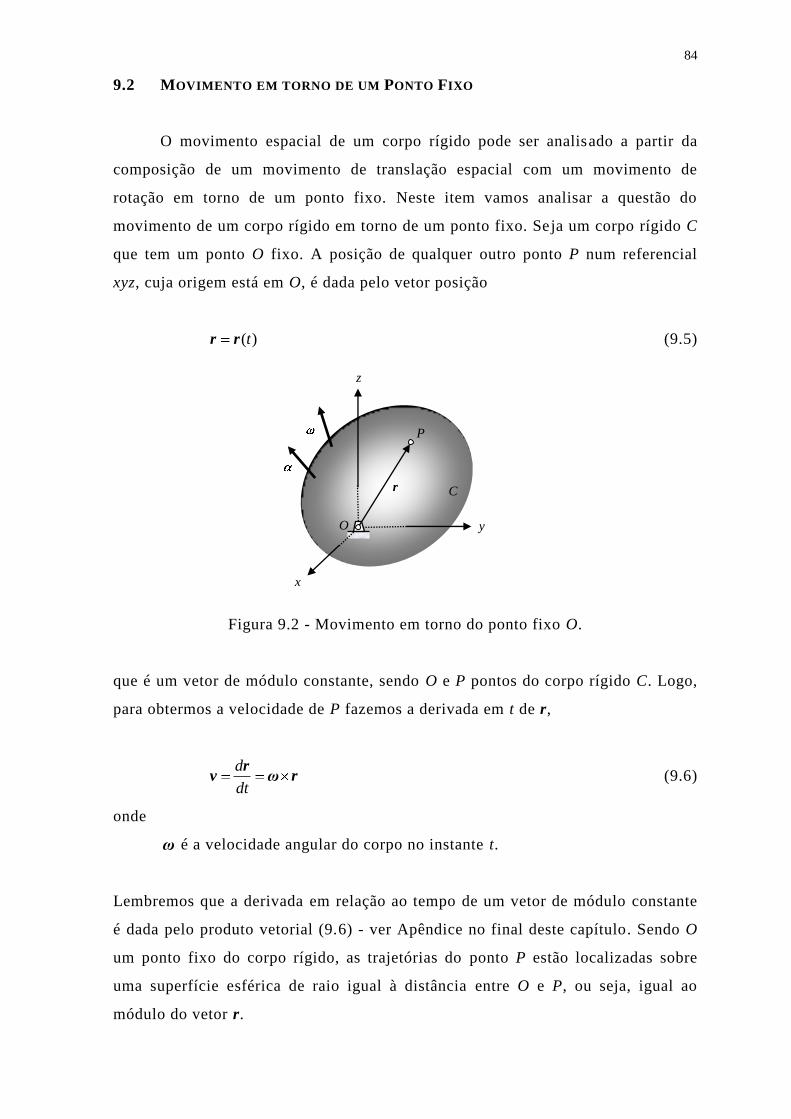
84
9.2 MOVIMENTO EM TORNO DE UM PONTO FIXO
O movimento espacial de um corpo rígido pode ser analisado a partir da
composição de um movimento de translação espacial com um movimento de
rotação em torno de um ponto fixo. Neste item vamos analisar a questão do
movimento de um corpo rígido em torno de um ponto fixo. Seja um corpo rígido C
que tem um ponto O fixo. A posição de qualquer outro ponto P num referencial
xyz, cuja origem está em O, é dada pelo vetor posição
)(trr (9.5)
Figura 9.2 - Movimento em torno do ponto fixo O.
que é um vetor de módulo constante, sendo O e P pontos do corpo rígido C. Logo,
para obtermos a velocidade de P fazemos a derivada em t de r,
rωr
vdt
d (9.6)
onde
ω é a velocidade angular do corpo no instante t.
Lembremos que a derivada em relação ao tempo de um vetor de módulo constante
é dada pelo produto vetorial (9.6) - ver Apêndice no final deste capítulo. Sendo O
um ponto fixo do corpo rígido, as trajetórias do ponto P estão localizadas sobre
uma superfície esférica de raio igual à distância entre O e P, ou seja, igual ao
módulo do vetor r.
z
x
r C
P
O y
85
A aceleração do ponto P é dada pela derivada no tempo da velocidade (9.6):
dt
d
dt
d
dt
d rωr
ωva (9.7)
Aplicando (9.6) em (9.7), obtemos
)( rωωrαa (9.8)
onde
dt
dωα é a aceleração angular do corpo no instante t.
Um importante caso particular de movimento em torno de um ponto fixo
ocorre quando um determinado corpo tem velocidade angular Pω constante em
torno de um eixo do corpo e este eixo tem velocidade angular Sω constante em
torno de um referencial fixo. Neste caso a velocidade angular do corpo é igual a:
SP ωωω (9.9)
E a aceleração angular pode ser obtida através de
dt
d
dt
d
dt
d SP ωωωα (9.10)
Sendo Pω um vetor de módulo constante, com direção variável, e Sω um vetor
constante, então a segunda parcela é igual a zero e a primeira é dada por
PS ωωα (9.11)
onde foram aplicados novamente resultados mostrados no Apêndice deste capítulo
com relação à derivação de vetores em relação ao tempo.
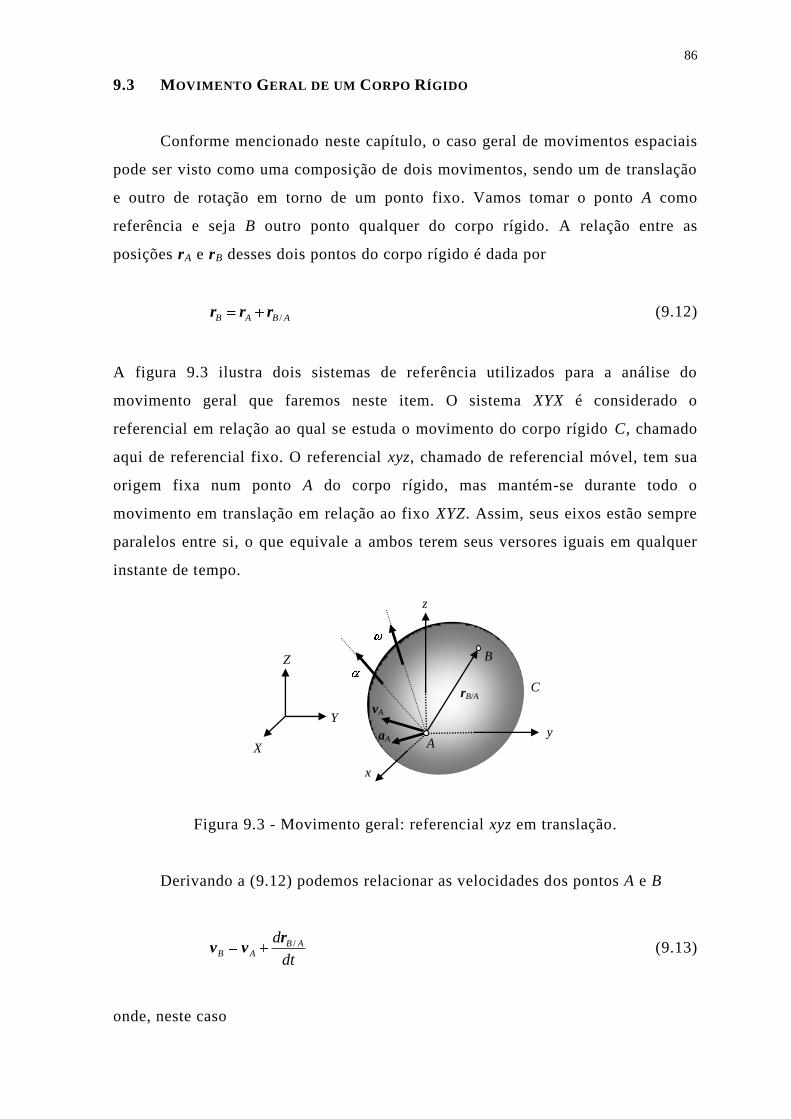
86
9.3 MOVIMENTO GERAL DE UM CORPO RÍGIDO
Conforme mencionado neste capítulo, o caso geral de movimentos espaciais
pode ser visto como uma composição de dois movimentos, sendo um de translação
e outro de rotação em torno de um ponto fixo. Vamos tomar o ponto A como
referência e seja B outro ponto qualquer do corpo rígido. A relação entre as
posições rA e rB desses dois pontos do corpo rígido é dada por
ABAB /rrr (9.12)
A figura 9.3 ilustra dois sistemas de referência utilizados para a análise do
movimento geral que faremos neste item. O sistema XYX é considerado o
referencial em relação ao qual se estuda o movimento do corpo rígido C, chamado
aqui de referencial fixo. O referencial xyz, chamado de referencial móvel, tem sua
origem fixa num ponto A do corpo rígido, mas mantém-se durante todo o
movimento em translação em relação ao fixo XYZ. Assim, seus eixos estão sempre
paralelos entre si, o que equivale a ambos terem seus versores iguais em qualquer
instante de tempo.
Figura 9.3 - Movimento geral: referencial xyz em translação.
Derivando a (9.12) podemos relacionar as velocidades dos pontos A e B
dt
d ABAB
/rvv (9.13)
onde, neste caso
z
x
rB/A C
B
A y
vA
aA
X
Y
Z
87
xyzBABAB
dt
d)(/
/ vvr
(9.14)
corresponde à velocidade de B em relação ao referencial xyz, fixo no ponto A. O
movimento do corpo rígido em relação ao referencial xyz é um movimento de
rotação em relação a um ponto fixo, com velocidade angular . Logo
ABxyzB /)( rωv (9.15)
e
ABAB /rωvv (9.16)
Para se obter a relação entre as acelerações dos pontos A e B, derivamos a
equação (9.16)
dt
d
dt
d
dt
d
dt
d ABAB
AB //
rωr
ωvv (9.17)
A partir dos resultados obtidos no item anterior, podemos escrever
)( // ABABAB rωωrαaa (9.18)
onde é a aceleração angular do corpo rígido.
Assim, é possível obter a posição, a velocidade e a aceleração de um ponto
B qualquer de um corpo rígido a partir dos correspondentes valores de um ponto A,
cujo movimento seja dado. As equações (9.12), (9.15) e (9.18) expressam estas
relações para um movimento espacial qualquer. Podem ser aplicadas, é óbvio, para
os casos particulares de translação, onde os vetores velocidade angular e
aceleração angular são nulos mostrando que nestes casos as velocidades e as
acelerações de todos os pontos do corpo rígido são iguais em cada instante. Estas
equações também podem ser usadas para os movimentos de rotação em torno de
um ponto fixo em A. Nestes casos os vetores velocidade e aceleração deste ponto
são nulos e as equações resultantes repetem aquelas obtidas no item anterior.
Observemos que como os dois referenciais utilizados neste caso estão
sempre paralelos, todos os vetores podem ser escritos no referencial móvel xyz.

88
9.4 MOVIMENTO GERAL E MOVIMENTO RELATIVO
Em muitas situações conhece-se o movimento de um corpo rígido em
relação a outro corpo, representado por um referencial móvel xyz, e conhece-se o
movimento deste referencial móvel em relação a outro referencial fixo XYZ. Pode-
se escrever para este caso que
ABAB /rrr (9.19)
A figura 9.4 ilustra estes dois sistemas de referência. Vamos analisar o movimento
do corpo rígido C fazendo a composição a partir dos dados do movimento relativo
entre ambos os referenciais. A origem do referencial móvel xyz está num ponto A
qualquer não necessariamente pertencente ao corpo rígido C. Em muitas aplicações
este referencial representa outro corpo em relação ao qual se conhece o movimento
de C.
Figura 9.4 - Movimento geral: referencial xyz em movimento qualquer.
Para obtermos a relação entre as velocidades de A e B, tomadas em relação
ao referencial XYZ, vamos derivar a (9.19)
dt
d ABAB
/rvv (9.20)
Conforme mostrado no final deste capítulo, a derivada do vetor rB/A é igual a
z
x
rB/A
C
B
A
y
X
Y
Z
rA
rB

89
xyz
BAAB
BA
dt
d
dt
d //
/ rrΩ
r (9.21)
onde é a velocidade angular do referencial xyz em relação a XYZ. É importante
observar que neste caso
ABxyzB
xyz
AB
dt
d//
/ vvr
(9.22)
ou seja, é a velocidade de B em relação ao referencial xyz, de origem em A.
Substituindo (9.22) em (9.21) e, em seguida, o resultado em (9.20) obteremos
ABABAB // vrΩvv (9.23)
onde são definidas as componentes da velocidade
ABA /rΩv velocidade de arraste
xyzBAB // vv velocidade de B relativa ao referencial móvel xyz
Para se obter a relação entre as acelerações dos pontos A e B, derivamos a
equação (9.23)
dt
d
dt
d
dt
d
dt
d
dt
d ABABAB
AB ///
vrΩr
Ωvv (9.24)
A partir dos resultados (9.21) e (9.22), podemos escrever
ABABABABABABdt
d///// )( avΩvrΩΩr
Ωaa (9.25)
onde dt
dΩ é a aceleração angular do referencial xyz em relação à XYZ. Portanto,
agrupando de forma conveniente, escrevemos
ABABABABAB 2dt
d//// )( avΩrΩΩr
Ωaa (9.26)
90
onde são definidas as componentes de aceleração:
)( // ABABAdt
drΩΩr
Ωa aceleração de arraste
AB2 /vΩ aceleração de Coriolis ou complementar
AB /a aceleração de B relativa ao referencial móvel a xyz
Portanto, as equações (9.23) e (9.26) relacionam as velocidades e as
acelerações de dois pontos A e B, pertencentes a corpos rígidos distintos. Observe
que são iguais às equações gerais do movimento relativo para o caso de
movimentos planos, conforme já mostradas no Capítulo 5.
Assim, é possível obter a posição, a velocidade e a aceleração de um ponto
B qualquer de um corpo rígido a partir dos correspondentes valores de um ponto A,
cujo movimento seja dado. As equações (9.23) e (9.26) expressam estas relações
para um movimento espacial qualquer. Podem ser aplicadas, é óbvio, para o caso
particular no qual o ponto B está fixo no referencial xyz. Neste caso as equações
(9.23) e (9.26) tem apenas as parcelas de arraste não nulas, tanto para a velocidade
como para a aceleração, conforme mostrado no item 9.3.
9.5 ÂNGULOS DE EULER
Para definir a posição angular de um corpo rígido no espaço é usual utilizar
3 coordenadas da posição do centro de massa e 3 ângulos sequencialmente tomados
em relação a determinados referenciais móveis ou fixos. Um conjunto entre as
várias sequências para estes ângulos são os ângulos de Euler. Vamos defini-los
com auxílio das Figuras 9.5. Sejam inicialmente coincidentes dois referenciais, um
fixo XYZ e um móvel xyz.
Conforme mostrado nas Figura 9.5, os ângulos de Euler, representados por
, θ e ψ são definidos através de 3 posições sucessivas do sistema móvel xyz. A
primeira posição é definida através do ângulo de rotação em torno de Z levando o
referencial móvel à posição angular mostrada na Figura 9.5a como x1y1z1; a
segunda posição é definida através do ângulo θ de rotação em torno de x1 levando
o referencial móvel à posição angular mostrada na Figura 9.5b como x2y2z2 e a
posição final é definida através do ângulo ψ de rotação em torno de z2 levando o
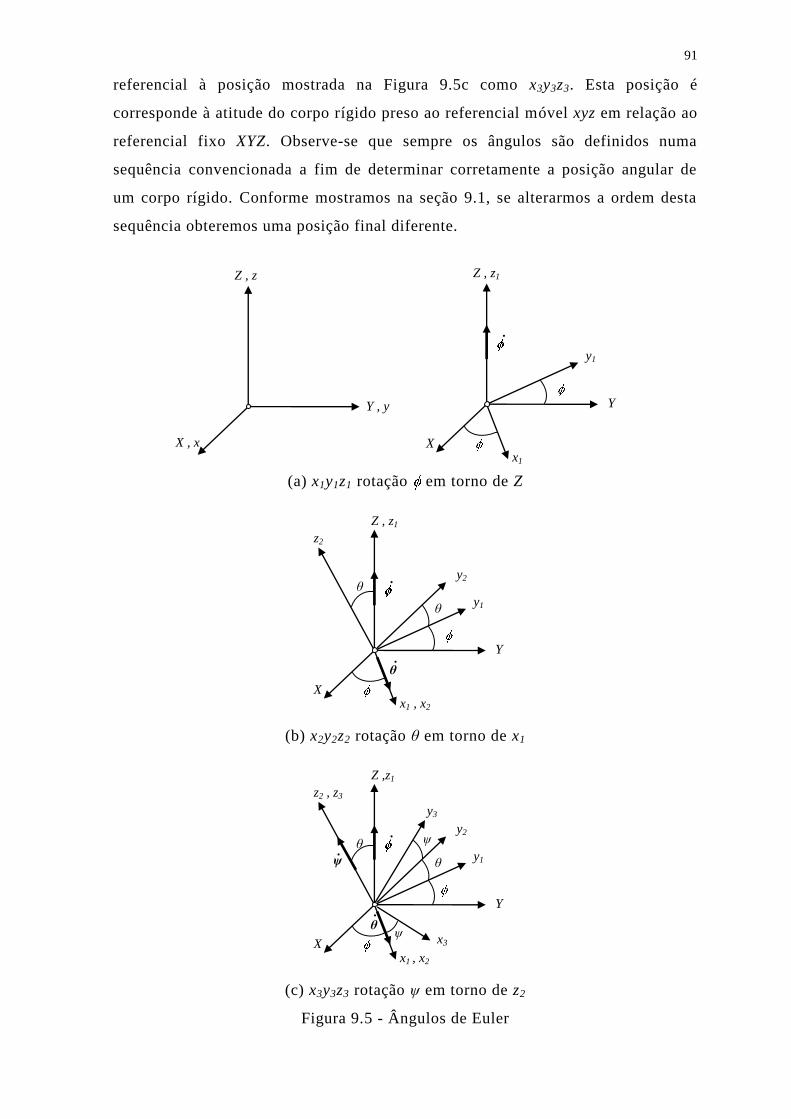
91
referencial à posição mostrada na Figura 9.5c como x3y3z3. Esta posição é
corresponde à atitude do corpo rígido preso ao referencial móvel xyz em relação ao
referencial fixo XYZ. Observe-se que sempre os ângulos são definidos numa
sequência convencionada a fim de determinar corretamente a posição angular de
um corpo rígido. Conforme mostramos na seção 9.1, se alterarmos a ordem desta
sequência obteremos uma posição final diferente.
(a) x1y1z1 rotação em torno de Z
(b) x2y2z2 rotação θ em torno de x1
(c) x3y3z3 rotação ψ em torno de z2
Figura 9.5 - Ângulos de Euler
Y
Z ,z1
X
∙
x1 , x2
y1
θ
θ y2
z2 , z3
θ ∙
x3
y3
ψ
ψ
ψ ∙
Y
Z , z1
X
∙
x1 , x2
y1
θ
θ y2
z2
θ ∙
Z , z1
X
Y
∙
x1
y1
Z , z
X , x
Y , y
92
Devemos relacionar as componentes da velocidade angular do corpo rígido
no referencial xyz, com as velocidades angulares relativas dadas pelas derivadas
temporais dos ângulos de Euler. Seja dada a velocidade angular do corpo rígido
escrita em componentes do referencial móvel como
kjiω zyx (9.27)
Observando nas Figuras 9.5, podemos escrever esta velocidade angular em função
dos ângulos de Euler como
kjiω )cos()sen( (9.28)
Algumas vezes, quando o corpo rígido é dado por um sólido de revolução com
velocidade angular relativa em torno de seu eixo longitudinal denominada spin,
utilizamos o referencial móvel de forma um pouco modificada. O referencial
móvel xyz passa a ser parcialmente preso ao corpo, isto é, tem seu eixo z sempre
coincidente com o eixo longitudinal do corpo rígido, mas não acompanha o
movimento de spin. Assim o referencial móvel está na posição dada por x2y2z2 e a
velocidade angular ω do corpo rígido é dada por:
RωΩω (9.29)
onde Ω é a velocidade angular do referencial móvel e ωR é a velocidade angular
relativa do corpo rígido em relação a este referencial. Portanto,
kjiΩ )cos()sen( (9.30)
e
kω R
(9.31)
Nestes casos chama-se precessão ao movimento angular representado pela variação
do ângulo , chama-se nutação ao movimento angular definido pela variação do
ângulo θ e spin ao movimento definido pela variação angular ψ.
93
APÊNDICE - RELAÇÃO ENTRE DERIVADAS TEMPORAIS
Sejam dois referenciais: XYZ um referencial fixo e outro referencial xyz
móvel em relação ao primeiro. Seja um vetor A, variável no tempo, escrito no
referencial móvel xyz como
kjiA zyx AAA (9.32)
A derivada temporal deste vetor em relação ao referencial xyz, é dada por
kjiA
dt
dA
dt
dA
dt
dA
dt
d zyx
xyz
(9.33)
Para calcular a derivada temporal do vetor A em relação ao referencial XYZ, temos
dt
dA
dt
dA
dt
dA
dt
dA
dt
dA
dt
dA
dt
d
dt
dzyx
zyx
XYZ
kjikji
AA (9.34)
Como
kΩk
jΩj
iΩi
dt
d
dt
d
dt
d (9.35)
onde Ω é a velocidade angular do referencial móvel xyz em relação a XYZ,
)()()( kΩjΩiΩkjiA
zyxzyx AAA
dt
dA
dt
dA
dt
dA
dt
d (9.36)
ou
kΩjΩiΩkjiA
zyxzyx AAA
dt
dA
dt
dA
dt
dA
dt
d (9.37)
Logo
AΩAAA
xyzXYZ dt
d
dt
d
dt
d (9.38)
Observe-se que se A é constante em relação à xyz, então
AΩAA
XYZdt
d
dt
d (9.39)
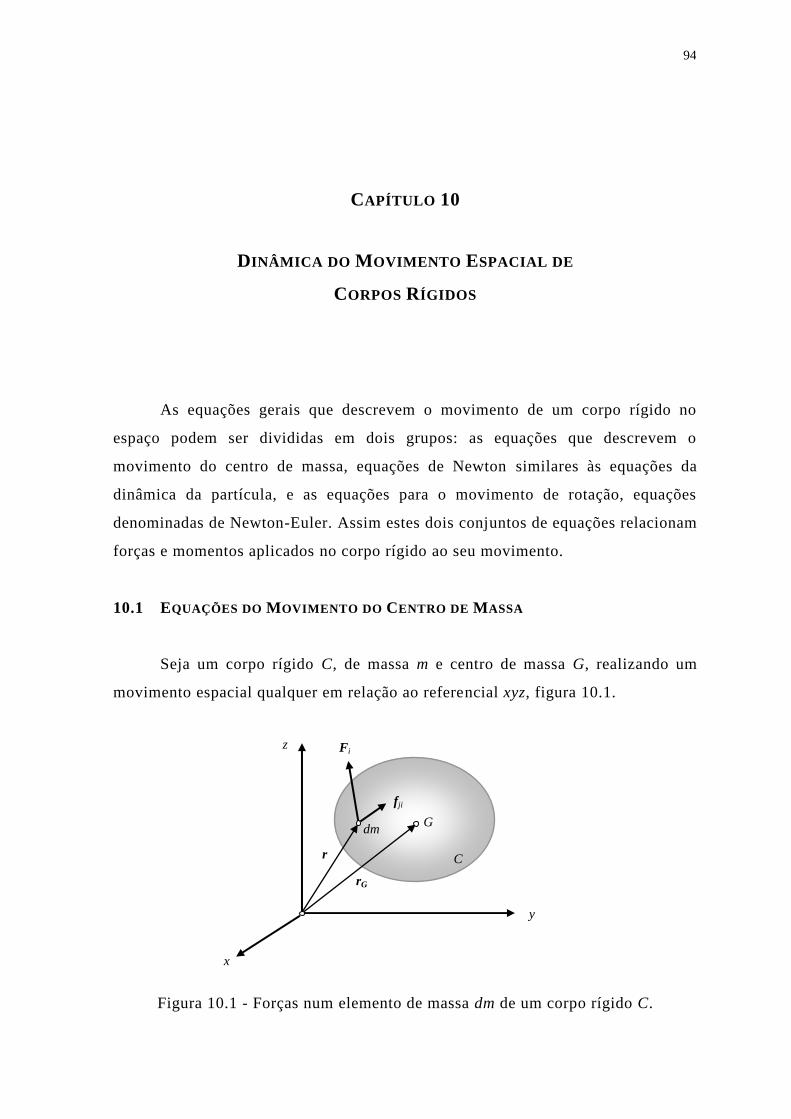
94
CAPÍTULO 10
DINÂMICA DO MOVIMENTO ESPACIAL DE
CORPOS RÍGIDOS
As equações gerais que descrevem o movimento de um corpo rígido no
espaço podem ser divididas em dois grupos: as equações que descrevem o
movimento do centro de massa, equações de Newton similares às equações da
dinâmica da partícula, e as equações para o movimento de rotação, equações
denominadas de Newton-Euler. Assim estes dois conjuntos de equações relacionam
forças e momentos aplicados no corpo rígido ao seu movimento.
10.1 EQUAÇÕES DO MOVIMENTO DO CENTRO DE MASSA
Seja um corpo rígido C, de massa m e centro de massa G, realizando um
movimento espacial qualquer em relação ao referencial xyz, figura 10.1.
Figura 10.1 - Forças num elemento de massa dm de um corpo rígido C.
y
z
r
dm
C
G
rG
fji
Fi
x

95
Sejam várias forças externas F atuantes neste corpo em diferentes pontos.
Vamos identificar a força externa resultante que atua na posição i, de massa
elementar dm, como Fi e a força interna que outro elemento na posição j faz sobre
i como fij. Escrevendo a lei de Newton para a massa elementar dm obtemos
dmj
jii afF (10.1)
Se somarmos a equação de movimento (10.1) aplicada a todos os elementos deste
corpo rígido, obteremos
mi j
ji
i
i dmafF (10.2)
A relação que define a posição do centro de massa G deste corpo rígido é dada por
m
G dmm rr (10.3)
Derivando, obtemos a seguinte relação para a velocidade do centro de massa
m
G dmm vv (10.4)
e para a aceleração
m
G dmm aa (10.5)
onde m é a massa do corpo rígido. Aplicando (10.5) em (10.2) obtemos
G
i j
ji
i
i mafF (10.6)
Através da lei da ação e reação de Newton sabemos que a segunda parcela do lado
esquerdo de (10.6) é nula. Logo
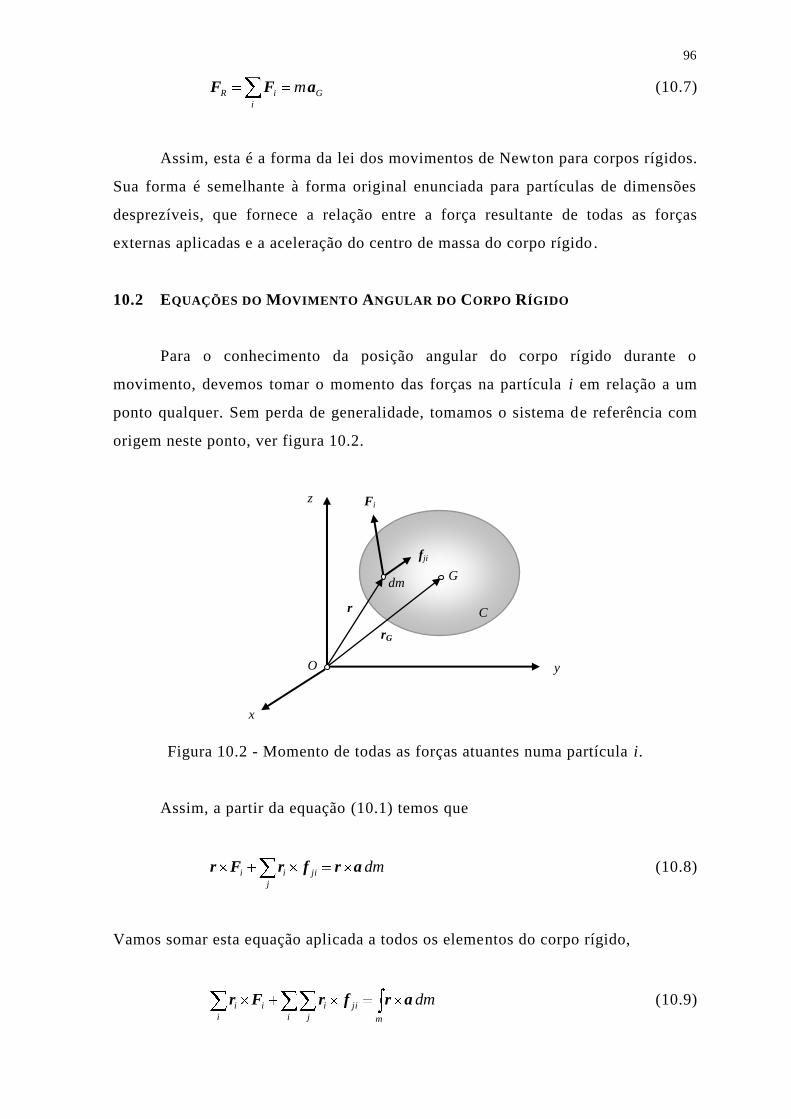
96
G
i
iR maFF (10.7)
Assim, esta é a forma da lei dos movimentos de Newton para corpos rígidos.
Sua forma é semelhante à forma original enunciada para partículas de dimensões
desprezíveis, que fornece a relação entre a força resultante de todas as forças
externas aplicadas e a aceleração do centro de massa do corpo rígido .
10.2 EQUAÇÕES DO MOVIMENTO ANGULAR DO CORPO RÍGIDO
Para o conhecimento da posição angular do corpo rígido durante o
movimento, devemos tomar o momento das forças na partícula i em relação a um
ponto qualquer. Sem perda de generalidade, tomamos o sistema de referência com
origem neste ponto, ver figura 10.2.
Figura 10.2 - Momento de todas as forças atuantes numa partícula i.
Assim, a partir da equação (10.1) temos que
dmj
jiii arfrFr (10.8)
Vamos somar esta equação aplicada a todos os elementos do corpo rígido,
mi j
jii
i
ii dmarfrFr (10.9)
y
z
r
dm
C
G
rG
fji
Fi
x
O

97
A segunda parcela de (10.9) referente ao momento de todas as forças internas que
atuam num corpo rígido é nula. Logo
mi
iiR dmarFrM (10.10)
onde MR é o momento resultante dos momentos de todas as forças externas
aplicadas ao corpo rígido.
Das equações da cinemática de um corpo rígido podemos escrever
)( rωωrαaa 0 (10.11)
Aplicando (10.11) em (10.10)
m
OR dm)]([ rωωrαarM (10.12)
ou
mmm
OR dmdmdm )]([)( rωωrrαrarM (10.13)
Utilizando em (10.13) os seguintes vetores
kjiM zyxR MMM - momento resultante
kjir zyx - vetor posição do elemento de massa dm
kjia OzOyOxO aaa - aceleração do ponto O
kjiα zyx - aceleração angular do corpo
kjiω zyx - velocidade angular do corpo.
e as definições de momentos de inércia, ver apêndice,
m
22
x dmzyI )( m
22
y dmzxI )( m
22
z dmyxI )(
e os produtos de inércia, ver apêndice,

98
m
yxxy dmxyII m
zyyz dmyzII m
xzzx dmzxII
obteremos
)()()(
)(
)()()(
)(
)()()(
)(
xzyyzzyxzx
2
y
2
xxy
yxyxzzOxGOyGz
zyxxyyxzyz
2
x
2
zzx
xzxzyyOzGOxGy
yxzzxxzyxy
2
z
2
yyz
zyzyxxOyGOzGx
III
IIImaymaxM
III
IIImaxmazM
III
IIImazmayM
(10.14)
Estas três equações escalares são gerais e muito pouco úteis se tomarmos os
referenciais xyz como fixos, pois neste caso os momentos e produtos de inércia
estariam variando ao longo do movimento. Por outro lado, se escrevermos os
vetores num referencial preso ao corpo rígido, chamado referencial móvel, então
estes parâmetros são constantes, embora a equação (10.14) ainda continue
complexa. Vamos então colocar a origem O do referencial preso ao corpo
coincidente com um ponto fixo (aO=0) ou com o seu centro de massa G (rG=0).
Em ambos os casos, temos que
)()()(
)(
)()()(
)(
)()()(
)(
xzyyzzyxzx
2
y
2
xxy
yxyxzzz
zyxxyyxzyz
2
x
2
zzx
xzxzyyy
yxzzxxzyxy
2
z
2
yyz
zyzyxxx
III
IIIM
III
IIIM
III
IIIM
(10.15)
Se o referencial tiver origem coincidente com um ponto fixo ou com o centro de
massa do corpo rígido e os seus eixos forem eixos principais, então os produtos de
inércia são nulos, logo

99
yxyxzzz
xzxzyyy
zyzyxxx
IIIM
IIIM
IIIM
)(
)(
)(
(10.16)
As equações (10.16) são chamadas equações de Newton-Euler, devido ao trabalho
realizado por Euler no desenvolvimento da dinâmica da rotação de corpos rígidos.
Se o movimento for plano com rotação em torno do eixo z, então a equação
geral (10.15) é igual a
zzz
zyz
2
zzxy
zzx
2
zyzx
IM
IIM
IIM
(10.17)
E, neste caso, os eixos forem principais, ficamos com as equações
zzz
y
x
IM
0M
0M
(10.18)
Estas equações são utilizadas em movimentos planos. Devemos notar que nestes
casos se o eixo z não for um eixo principal de inércia, então, os momentos
resultantes nos eixos x e em z não são nulos, mas dados por (10.17).

100
APÊNDICE - MOMENTOS E PRODUTOS DE INÉRCIA
Vamos definir os momentos de produtos de inércia de corpos rígidos. São
propriedades relacionadas à distribuição da massa sobre o corpo. Estas
propriedades estão presentes nas equações da dinâmica de corpos rígidos relativas
aos movimentos de rotação. Nestes casos não só a massa do corpo, mas
principalmente a sua distribuição no volume tem influência nas acelerações
provocadas pelos esforços aplicados.
Inicialmente vamos tomas uma partícula de massa m. Definimos os
momentos de inércia desta partícula em relação aos eixos coordenados como
)(
)(
)(
222
zz
222
yy
222
xx
yxmrmI
zxmrmI
zymrmI
(10.19)
e os produtos de inércia por
xzmrrmII
zymrrmII
yxmrrmII
xzxzzx
zyzyyz
yxyxxy
(10.20)
Figura 10.3 - Definições para partícula de massa m.
y
z
m
rz
x
O
ry
rx
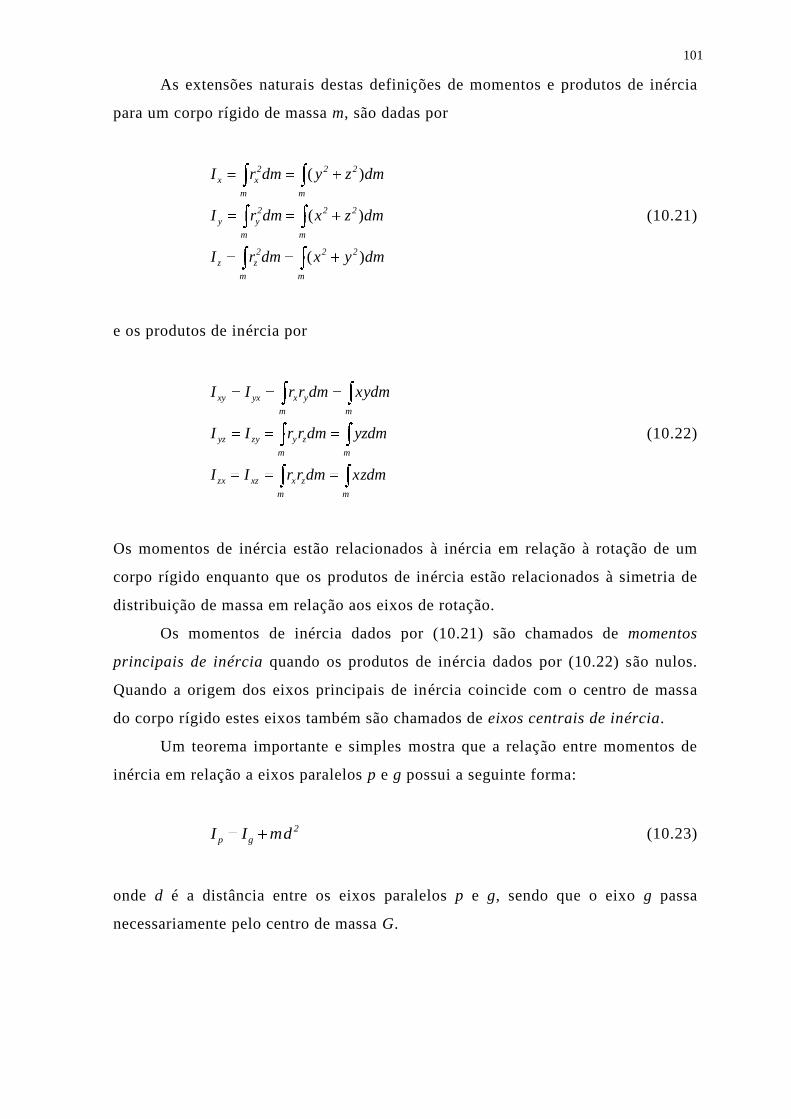
101
As extensões naturais destas definições de momentos e produtos de inércia
para um corpo rígido de massa m, são dadas por
m
22
m
2
zz
m
22
m
2
yy
m
22
m
2
xx
dmyxdmrI
dmzxdmrI
dmzydmrI
)(
)(
)(
(10.21)
e os produtos de inércia por
mm
zxxzzx
mm
zyzyyz
mm
yxyxxy
xzdmdmrrII
yzdmdmrrII
xydmdmrrII
(10.22)
Os momentos de inércia estão relacionados à inércia em relação à rotação de um
corpo rígido enquanto que os produtos de inércia estão relacionados à simetria de
distribuição de massa em relação aos eixos de rotação.
Os momentos de inércia dados por (10.21) são chamados de momentos
principais de inércia quando os produtos de inércia dados por (10.22) são nulos.
Quando a origem dos eixos principais de inércia coincide com o centro de massa
do corpo rígido estes eixos também são chamados de eixos centrais de inércia.
Um teorema importante e simples mostra que a relação entre momentos de
inércia em relação a eixos paralelos p e g possui a seguinte forma:
2
gp dmII (10.23)
onde d é a distância entre os eixos paralelos p e g, sendo que o eixo g passa
necessariamente pelo centro de massa G.