Dilated LMI conditions for time-varying polytopic descriptor systems: the discrete-time case
15
This article was downloaded by: [Washington University in St Louis] On: 05 October 2014, At: 21:56 Publisher: Taylor & Francis Informa Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer House, 37-41 Mortimer Street, London W1T 3JH, UK International Journal of Control Publication details, including instructions for authors and subscription information: http://www.tandfonline.com/loi/tcon20 Dilated LMI conditions for time-varying polytopic descriptor systems: the discrete-time case Gabriela Iuliana Bara a a LSIIT-UMR CNRS 7005 , University of Strasbourg , bd. Sébastien Brant, BP 10413, 67412 Illkirch, France Published online: 06 Jul 2011. To cite this article: Gabriela Iuliana Bara (2011) Dilated LMI conditions for time-varying polytopic descriptor systems: the discrete-time case, International Journal of Control, 84:6, 1010-1023, DOI: 10.1080/00207179.2011.586049 To link to this article: http://dx.doi.org/10.1080/00207179.2011.586049 PLEASE SCROLL DOWN FOR ARTICLE Taylor & Francis makes every effort to ensure the accuracy of all the information (the “Content”) contained in the publications on our platform. However, Taylor & Francis, our agents, and our licensors make no representations or warranties whatsoever as to the accuracy, completeness, or suitability for any purpose of the Content. Any opinions and views expressed in this publication are the opinions and views of the authors, and are not the views of or endorsed by Taylor & Francis. The accuracy of the Content should not be relied upon and should be independently verified with primary sources of information. Taylor and Francis shall not be liable for any losses, actions, claims, proceedings, demands, costs, expenses, damages, and other liabilities whatsoever or howsoever caused arising directly or indirectly in connection with, in relation to or arising out of the use of the Content. This article may be used for research, teaching, and private study purposes. Any substantial or systematic reproduction, redistribution, reselling, loan, sub-licensing, systematic supply, or distribution in any form to anyone is expressly forbidden. Terms & Conditions of access and use can be found at http:// www.tandfonline.com/page/terms-and-conditions
-
Upload
gabriela-iuliana -
Category
Documents
-
view
214 -
download
2
Transcript of Dilated LMI conditions for time-varying polytopic descriptor systems: the discrete-time case

This article was downloaded by: [Washington University in St Louis]On: 05 October 2014, At: 21:56Publisher: Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer House,37-41 Mortimer Street, London W1T 3JH, UK
International Journal of ControlPublication details, including instructions for authors and subscription information:http://www.tandfonline.com/loi/tcon20
Dilated LMI conditions for time-varying polytopicdescriptor systems: the discrete-time caseGabriela Iuliana Bara aa LSIIT-UMR CNRS 7005 , University of Strasbourg , bd. Sébastien Brant, BP 10413, 67412Illkirch, FrancePublished online: 06 Jul 2011.
To cite this article: Gabriela Iuliana Bara (2011) Dilated LMI conditions for time-varying polytopic descriptor systems: thediscrete-time case, International Journal of Control, 84:6, 1010-1023, DOI: 10.1080/00207179.2011.586049
To link to this article: http://dx.doi.org/10.1080/00207179.2011.586049
PLEASE SCROLL DOWN FOR ARTICLE
Taylor & Francis makes every effort to ensure the accuracy of all the information (the “Content”) containedin the publications on our platform. However, Taylor & Francis, our agents, and our licensors make norepresentations or warranties whatsoever as to the accuracy, completeness, or suitability for any purpose of theContent. Any opinions and views expressed in this publication are the opinions and views of the authors, andare not the views of or endorsed by Taylor & Francis. The accuracy of the Content should not be relied upon andshould be independently verified with primary sources of information. Taylor and Francis shall not be liable forany losses, actions, claims, proceedings, demands, costs, expenses, damages, and other liabilities whatsoeveror howsoever caused arising directly or indirectly in connection with, in relation to or arising out of the use ofthe Content.
This article may be used for research, teaching, and private study purposes. Any substantial or systematicreproduction, redistribution, reselling, loan, sub-licensing, systematic supply, or distribution in anyform to anyone is expressly forbidden. Terms & Conditions of access and use can be found at http://www.tandfonline.com/page/terms-and-conditions

International Journal of ControlVol. 84, No. 6, June 2011, 1010–1023
Dilated LMI conditions for time-varying polytopic descriptor systems: the discrete-time case
Gabriela Iuliana Bara*
LSIIT-UMR CNRS 7005, University of Strasbourg, bd. Sebastien Brant, BP 10413, 67412 Illkirch, France
(Received 31 May 2010; final version received 3 May 2011)
This article addresses the admissibility analysis and state-feedback control synthesis problems of discrete-timepolytopic descriptor systems with possibly time-varying parameters. First, we present a new necessary andsufficient strict linear matrix inequality (LMI) condition for the admissibility analysis of linear time-invariant(LTI) descriptor systems. Then, based on the concept of poly-quadratic admissibility, introduced in this article,we extend this result to the admissibility analysis of possibly time-varying parameter-dependent descriptorsystems. This extension, which applies to both uncertain and measurable parameters, uses parameter-dependentLyapunov functions and employs two slack variables. The extended conditions are also expressed as strict LMIconditions which are easily tractable numerically compared to the non-strict ones often encountered when dealingwith descriptor systems. Note that we have proposed two separate admissibility analysis conditions: one directlyexploitable for state estimation and the other for state-feedback control. The need for different admissibilityanalysis conditions for each synthesis problem is motivated by the fact that the duality between state estimationand state-feedback control, which hold in the case of measurable parameters, does not hold when dealing withuncertain ones. In our approach, we overcome the absence of such duality by considering a dilation only on thedynamical part of the descriptor system. The application of our analysis result to both robust state-feedbackcontrol and polytopic state-feedback control are also presented in this article. Our analysis results extend todescriptor systems, some existing results developed for regular systems.
Keywords: linear discrete-time descriptor systems; polytopic descriptor systems; time-varying parameters;parameter-dependent Lyapunov functions; slack variables; dilated linear matrix inequalities
1. Introduction
The class of parameter-dependent systems has received
significant attention over the past decades due to their
ability to offer a good description for many industrial
processes and real-world applications. A linear para-
meter-varying (LPV) model can be obtained from a
nonlinear system either by quasi-LPV modelling or by
means of a linearisation around a family of operating
points (see Rugh and Shamma (2000) for further
details). The time-variance of the parameters, assumed
measurable, reflects the change of operating point.
Also, the parameter-dependent/polytopic representa-
tion is often used for modelling uncertain systems. This
representation encompasses the case of uncertain
interval matrices and offers a better description for
most uncertain systems since norm-bounded parameter
uncertainties tend to overestimate the uncertainties in
the system as pointed out by de Souza, Barbosa, and
Fu (2008). In general, the analysis results developed for
parameter-dependent/polytopic systems can be applied
to LPV systems and uncertain polytopic systems
regardless of whether the parameters are measurable
(i.e. available for control purposes) or uncertain.
However, when it comes to solving a synthesisproblem, the uncertainty or measurability of theparameters plays an important role. For instance,when the parameters are uncertain a robust synthesis isperformed while a parameter-dependent controller issynthesised whenever the parameters are measurable.Note that the LPV synthesis may be more difficult thanthe robust design (regarding polytopic uncertainties)since it requires computing several gains instead of asingle one. Moreover, as shown by Blanchini andMiani (2003, 2010), the separation principle and theduality between state estimation and state-feedbackcontrol, which hold in the case of LPV synthesis, donot hold when dealing with uncertain parameters. Thismeans that the analysis results expressed in dual formcan be applied only for gain-scheduling control but notfor robust control. As a consequence, the robustsynthesis becomes more difficult than the LPV onein the sense that it requires to separately developanalysis results exploitable either for state estimationor state-feedback control without using the dualityproperty.
Descriptor or singular systems, also called general-ised state-space systems, have the ability to incorporate
*Email: [email protected]
ISSN 0020–7179 print/ISSN 1366–5820 online
� 2011 Taylor & Francis
DOI: 10.1080/00207179.2011.586049
http://www.informaworld.com
Dow
nloa
ded
by [
Was
hing
ton
Uni
vers
ity in
St L
ouis
] at
21:
56 0
5 O
ctob
er 2
014

algebraic constraints on physical variables in additionto differential or difference equations. Hence, para-meter-dependent descriptor systems allow a moregeneral representation with a practical appeal formany applications such as, for instance, aircraftcontrol (Masubuchi, Kato, Saeki, and Ohara 2004)and robotic systems (Mills and Goldenberg 1989). It isworth mentioning that LPV systems whose state-spacematrices are rational functions of the parameters canbe rewritten as descriptor LPV systems with affineparameter-dependent state matrices by appropriatelychoosing an augmented descriptor state vector. Thisfurther motivates our interest for the study ofparameter-dependent/polytopic descriptor systems.
Without being exhaustive, there exist, in general,two main approaches for developing analysis/synthesisresults for parameter-dependent/polytopic systemswhich are less restrictive than the classical ones basedon parameter-independent Lyapunov functions. Thefirst one employs parameter-dependent Lyapunovfunctions (PDLF) while the second one introducesadditional matrix variables usually called slack vari-ables. It has been shown by Feron, Apkarian, andGahinet (1996), de Oliveira, Bernussou, and Geromel(1999), Gahinet, Apkarian, and Chilali (1996) andDaafouz and Bernussou (2001) that the use of PDLFallows to outperform the analysis and synthesis resultsthat are based on parameter-independent Lyapunovfunctions. As a consequence, PDLF-based analysis andsynthesis methods have also been developed fordescriptor systems with either constant parameters(such as the approaches presented by Fang (2002),Gao, Chen, and Sun (2003), Sakuwa and Fujisaki(2005), de Souza et al. (2008) and Yagoubi, Bouali, andChevrel (2008)) or time-varying ones (Masubuchi,Akiyama, and Saeki 2003; Masubuchi et al. 2004;Bara 2010). The use of slack variables increases thedegree of freedom of the design variables leading toless restrictive analysis and synthesis results. Inaddition, as far as synthesis is concerned, someconstraints involving Lyapunov matrices (matrixequality constraints, for instance) are replaced byanalogous constraints involving however slack vari-ables, thus allowing to obtain less conservativesynthesis results.
The results developed in the literature for thecontinuous-time case generally do not apply todiscrete-time systems. This is particularly true whenthe parameters are time-varying. In the case ofdiscrete-time parameter-dependent descriptor systems,when the parameters are time-invariant, the resultsreported in the literature either make use of PDLF(Fang 2002) or slack variables (Kuo and Fang 2003).To our knowledge, however, the only work consideringtime-varying parameters and using PDLF and slack
variables was recently presented by Chadli, Darouach,and Daafouz (2008a) and Chadli, Daafouz, andDarouach (2008b). Unfortunately, their results areerroneous as shown by the counterexample presentedin Section 3. To the best of our knowledge, there are noother results dealing with the admissibility of discrete-time descriptor systems with time-varying polytopicparameters and employing PDLF and slack variables.
In this article, we address the admissibility analysisand control of discrete-time polytopic descriptorsystems with possibly time-varying parameters byusing PDLF and slack variables. First, we state a newnecessary and sufficient strict linear matrix inequality(LMI) condition for the admissibility analysis of lineartime-invariant (LTI) descriptor systems by using oneslack variable. Then, based on the concept of poly-quadratic admissibility, that we introduce in this article,we extend our new condition to the admissibilityanalysis of polytopic descriptor systems by involving,this time, two slack variables. Doing so leads to twodifferent sets of sufficient strict LMI conditions which,from a numerical point of view, are preferable to non-strict ones (Xu and Lam 2004a,b) often encounteredwhen dealing with descriptor systems. Note that thefirst set of conditions can be easily exploited for stateestimation purposes while the second one for state-feedback control. Indeed, our approach takes intoaccount the absence of duality between state estimationand state-feedback in the case of uncertain parametersby proposing separate admissibility analysis conditionsexploitable for each case. This has been achieved byconsidering a dilation only on the dynamical part of thedescriptor system. When the parameters are time-invariant, our analysis results extend to descriptorsystems the ones proposed by de Oliveira et al. (1999)and Peaucelle, Arzelier, Bachelier, and Bernussou(2000) for regular state-space systems. The applicationof our analysis result to robust state-feedback controland polytopic state-feedback control are also presentedand discussed. The numerical examples, also reportedin this article, show that, in the case of time-invariantparameters, our new admissibility analysis conditionsreduce the conservatism of the result presented by Kuoand Fang (2003). Also in the case of time-invariantparameters, we have found that there are manysituations where our method performed better thanthat of Fang (2002) by identifying a larger admissibilityregion. We have also found situations where ourmethod and the one of Fang (2002) identified thesame admissibility region as well as situations where thelatter method provided better results. However, notethat the advantage of our analysis results, over themethods presented in the literature, is that they allowtime-varying parameters while not being more restric-tive in the time-invariant case and, more importantly,
International Journal of Control 1011
Dow
nloa
ded
by [
Was
hing
ton
Uni
vers
ity in
St L
ouis
] at
21:
56 0
5 O
ctob
er 2
014

these results are easily exploitable for synthesispurposes by taking into account the absence of dualityin the case of uncertain parameters.
This article is organised as follows. Section 2 statesthe problem under consideration and introduces theconcept of poly-quadratic admissibility. In Section 3,we present some preliminaries and discuss some recentresults. Section 4 provides our main contribution.First, we give a new necessary and sufficient conditionfor the admissibility analysis of LTI descriptor systems.Then, we extend this result to poly-quadratic admis-sibility of parameter-dependent descriptor systems andpresent its application to robust as well as polytopicstate-feedback control. Numerical examples are pre-sented in Sections 5 and 6 concludes our work.
Notations: The notations used throughout this articleare standard. The relation A4B (A5B) means thematrix A�B is positive (negative) definite. The super-script T stands for matrix transposition. The matrix Instands for the identity matrix of dimension n. (?) isused for the blocks induced by symmetry and He{A}means AþAT. Bdiag(A1, . . . ,Ai) is the block-diagonalmatrix having A1, . . . ,Ai on its main diagonal.Co(A1, . . . ,AN) denotes the convex hull generated bythe matrices A1, . . . ,AN.
2. Problem statement and definitions
Consider the class of discrete-time parameter-depen-dent singular systems defined by
Exðkþ 1Þ ¼ Að�ðkÞÞxðkÞ þ Bð�ðkÞÞuðkÞ, ð1Þ
where x(k)2 IRn is the descriptor state vector andu(k)2 IRm is the control input. The matrix E2 IRn�n isconstant and may be singular with rankE¼ r� n.
�ðkÞ ¼ �1ðkÞ . . . �NðkÞ� �T
is the vector of real andpossibly time-varying parameters. Whenever possible,the time-dependency of the parameter vector will beomitted for brevity. In the following, we assume thatthe system matrices A(�) and B(�) belong to convexpolytopic sets defined as
A ¼
�Að�ÞjAð�Þ ¼
Xi¼Ni¼1
�iAi, �i � 0
for all i 2 f1, . . . ,Ng,Xi¼Ni¼1
�i ¼ 1
�, ð2aÞ
B ¼
�Bð�ÞjBð�Þ ¼
Xi¼Ni¼1
�iBi, �i � 0
for all i 2 f1, . . . ,Ng,Xi¼Ni¼1
�i ¼ 1
�: ð2bÞ
The matrices Ai and Bi are the vertices of polytopes Aand B, respectively. We define the index set I ¼{1, . . . ,N}. Note that this class of systems is very largesince it covers many uncertain systems as well as LPVsystems.
We recall some basic definitions for unforceddiscrete-time LTI descriptor systems.
Definition 2.1 (Dai 1989; Xu and Lam 2004a):Consider the system Ex(k)¼Ax(kþ 1) with constantmatrices.
. The system is regular if det(zE�A) is notidentically zero.
. A regular system is causal ifdeg(det(zE�A))¼ rankE.
. The system is said to be stable or Schur-stableif it has Schur-stable finite modes i.e. the rootsof det(zE�A)¼ 0 lie inside the unit disccentred at the origin.
. The system is admissible if it is regular, causaland stable.
In the sequel, a descriptor system is called regularif it satisfies the regularity property as stated inDefinition 2.1. We call standard state-space system asystem without algebraic constraints i.e. E¼ In.
The goal of this article is to develop new admissi-bility analysis and control synthesis conditions forpolytopic discrete-time singular systems using PDLFs.To this end, we use quadratic PDLF of the form:
VðkÞ ¼ VðxðkÞ,�ðkÞÞ ¼ xTðkÞETPð�ðkÞÞExðkÞ,
where Pð�Þ ¼Xi¼Ni¼1
�iPi: ð3Þ
The variation of this function along the solution of theunforced system (1) is given by
DV ¼ Vðkþ 1Þ � VðkÞ
¼ xTðkÞ�ATð�ÞPþð�ÞAð�Þ � ETPð�ÞE
�xðkÞ,
where A(�)¼A(�(k)), P(�)¼P(�(k)) and Pþð�Þ ¼Pð�ðkþ 1ÞÞ ¼
Pi¼Ni¼1 �iðkþ 1ÞPi ¼
Pi¼Ni¼1 �iðkÞPi with
�i(kþ 1)¼ �i(k) for all i2I . When the parameters arenot time-varying but constant, we have Pþ(�)¼P(�).
Based on the framework developed by de Oliveiraet al. (1999) and Daafouz and Bernussou (2001) foruncertain polytopic discrete-time systems, we introducethe concept of poly-quadratic admissibility which canbe seen as a generalisation to singular systems of thepoly-quadratic stability concept for standard state-space systems.
Definition 2.2: The unforced polytopic system (1) ispoly-quadratically admissible if it is regular andcausal over the polytope A and there exists a
1012 G.I. Bara
Dow
nloa
ded
by [
Was
hing
ton
Uni
vers
ity in
St L
ouis
] at
21:
56 0
5 O
ctob
er 2
014

parameter-dependent positive-definite quadraticLyapunov function (3) whose difference is negative-definite and decrescent.1
Remark 1: When the parameters �i are uncertain, thepoly-quadratic admissibility implies the robust admis-sibility of the system.
When the parameters are uncertain and based onthe previous definition, we introduce the notion ofrobust poly-quadratic causal stabilisability by state-feedback control.
Definition 2.3: The polytopic system (1) is calledrobustly, poly-quadratically and causally stabilisable bystate-feedback if there exists a control law u(k)¼Kx(k)such that the closed-loop system is poly-quadraticallyadmissible.
When the parameters are not uncertain and aresupposed measurable, we define the notion of poly-quadratic causal stabilisability by polytopic state-feedback control.
Definition 2.4: The polytopic system (1) is calledpoly-quadratically and causally stabilisable by polytopicstate-feedback if there exists a parameter-dependentdescriptor state-feedback control law
uðkÞ ¼ Kð�ðkÞÞxðkÞ, where Kð�Þ ¼Xi¼Ni¼1
�iKi ð4Þ
such that the closed-loop system is poly-quadraticallyadmissible.
3. State transformation and comments on previous
results
3.1 State transformation
As the matrix E is of rank r, there exist invertiblematrices S and T such that
SET ¼Ir 0
0 0
� , where T ¼
T11 T12
0 T22
� : ð5Þ
These matrices are not unique and, for instance, theQR factorisation of E can be employed in order toobtain the decomposition (5). Note that this decom-position is a particular case of the singular valuedecomposition (SVD) presented by Dai (1989) andhence leads to a particular equivalent SVD coordinatesystem. Based on the coordinate transformationxðkÞ ¼ T �xðkÞ, the matrices of the equivalent systemare SA(�)T and SB(�) where
SAð�ÞT ¼A11ð�Þ A12ð�Þ
A21ð�Þ A22ð�Þ
� ¼Xi¼Ni¼1
�iSAiT ð6Þ
was partitioned following the partitioning in (5). Notethat these equivalent system matrices belong to poly-topes SAT and SB, respectively. Using the notations
�xTðkÞ ¼ �xT1 ðkÞ �xT2 ðkÞ� �T
and
�Pð�Þ ¼ S�TPð�ÞS�1 ¼�P11ð�Þ �P12ð�Þ
�P21ð�Þ �P22ð�Þ
" #
it follows that the PDLF (3) can be rewritten as
VðkÞ ¼ �xTðkÞðSET ÞT �Pð�ÞðSET Þ �xðkÞ ¼ �xT1 ðkÞ�P11ð�Þ �x1ðkÞ:
Therefore, the singular system is poly-quadraticallyadmissible (as defined in Definition 2.2) if and only ifthe matrix A22(�) is invertible for any value of � and
�P11ð�Þ4 0,
~ATð�Þ �P11þð�Þ~Að�Þ � �P11ð�Þ5 0,
where ~Að�Þ ¼ A11ð�Þ � A12ð�ÞA22ð�Þ�1A21ð�Þ,
i.e. ~A(�) is poly-quadratically stable (Daafouz andBernussou (2001) for more details on poly-quadraticstability). Hence, based on the transformation intro-duced above, the poly-quadratic admissibility isequivalent to the poly-quadratic stability of a parameter-dependent system without algebraic constraints which,as pointed out by de Souza et al. (2008) (see Remark 2),does not carry a polytopic structure. Consequently, theavailable poly-quadratic stability results developed forpolytopic state-space systems cannot be exploited forpoly-quadratic admissibility. Moreover, as shown anddiscussed next, the extension of poly-quadraticstability results developed for polytopic state-spacesystems to singular systems is a difficult problem.
3.2 Comments on previous results
Recently, it has been claimed by Chadli et al. (2008a,b)that system (1) is stable whenever there exist non-singular symmetric matrices Pi such that
ETPiE � 0 for all i 2 I , ð7aÞ
ATi PjAi � ETPiE5 0 for all ði, j Þ 2 I � I : ð7bÞ
Unfortunately, this result is incorrect. In order to showthis, consider the following system matrices:
E ¼ BdiagðI2, 0Þ, A1 ¼
0:08 �0:06 0:5
0 �0:2 0
0:2 0 2:2
264
375
and A2 ¼
0:02 0:06 0:5
0 �0:2 0
0:2 0 �0:2
264
375:
International Journal of Control 1013
Dow
nloa
ded
by [
Was
hing
ton
Uni
vers
ity in
St L
ouis
] at
21:
56 0
5 O
ctob
er 2
014

The LMI conditions (7) were found feasible. However,
the system does not have stable finite modes for all
possible values of �. Indeed, for a constant �, the
characteristic polynomial is
detðzE�Að�ÞÞ ¼ ðzþ 0:2Þ
z� 0:08�1� 0:02�2
�0:1
0:2�2� 2:2�1
�, where �1þ �2 ¼ 1:
If, for instance, �1¼ 0.1 the system has an unstable
finite mode at �2.474. There are many values of � for
which the system has an unstable finite mode. This
counterexample shows that conditions (7) and, there-
fore, their dilated LMI extensions also proposed by
Chadli et al. (2008a,b) are incorrect. This discrepancy
can be explained as follows. In the case of standard
state-space systems i.e. E¼ In, the stability of the
polytopic system is equivalent to conditions (7b) with
Pi4 0 for all i2I (Daafouz and Bernussou 2001). This
can be proved by applying Schur complement since Pi
is positive-definite. In the case of descriptor systems,
Schur complement cannot be applied anymore since
the term ETPiE is only positive semi-definite and not
strictly positive-definite. In fact, conditions (7) are
necessary in order to guarantee the admissibility of
(1) with time-varying parameters but they are not
sufficient.
Remark 2: Note that, in general, the generalisation
of standard state-space systems theory to singular
systems is a difficult problem. For instance, the
stability analysis is more complicated in the case of
descriptor systems than it is when dealing with
standard state-space ones. It requires to consider
simultaneously the stability as well as the regularity
and either the absence of impulses (continuous-time
systems) or the causality (discrete-time systems). In
addition, as the Lyapunov matrix appearing in the
study of singular systems is indefinite, the analysis
results developed for standard state-space systems
exploiting the symmetry and the positive-definiteness
of the Lyapunov matrix cannot be easily generalised
to descriptor systems. Therefore, as also pointed out
in Xu, Yang, Niu, and Lam (2001), Xu and Lam
(2004a) and Rejichi, Bachelier, Chaabane, and Mehdi
(2008), developing necessary and sufficient conditions
for the stability analysis and stabilisation of uncertain
discrete-time singular systems is more difficult than
when dealing with state-space systems. This is
particularly true in the case of descriptor systems
with time-varying parametric uncertainties for which
necessary and sufficient stability analysis and stabili-
sation conditions still have not been proposed in the
literature.
In the following, we develop strict LMI conditionsfor poly-quadratic admissibility analysis (Definition2.2) as well as causal stabilisability by state-feedback(Definitions 2.3 and 2.4).
4. Main results
In this section, we provide the main contribution ofour article. First, we present a necessary and sufficientcondition for the admissibility analysis of discrete-timeLTI singular systems. This condition is expressed as astrict LMI feasibility problem and hence easilytractable by convex optimisation techniques (Boyd,El Ghaoui, Feron, and Balakrishnan 1994). Then, thisresult is extended to poly-quadratic admissibilityanalysis of polytopic singular systems. The applicationof this extension to the synthesis of state-feedbackcontrollers guaranteeing the poly-quadratic admissi-bility of the closed-loop system is discussed in eithercase where the parameters are uncertain or availablefor control purposes.
4.1 LTI systems
In the following, we provide a new necessary andsufficient LMI condition for the admissibility analysisof discrete-time LTI descriptor systems. Assuming thatthere is no parameter-dependency in the system, theunforced descriptor system reduces to
Exðkþ 1Þ ¼ AxðkÞ þ BuðkÞ: ð8Þ
Theorem 4.1 (Admissibility): The pair (E,A) is admis-sible if and only if there exist a symmetric matrixQ2 IRr�r and general matrices G2 IRr�r, X12 IR
r�(n�r)
and X22 IR(n� r)� (n� r) such that
He0 0
0 X2
� SAT
� �þ
Q 0
0 0
� ð?Þ
G X1
� �SAT Gþ GT �Q
264
3754 0
ð9Þ
where S and T are given by (5).
Proof: Based on the change of state variablesintroduced in the previous section, the equivalentstate matrix is
SAT ¼A11 A12
A21 A22
� :
The pair (E,A) is admissible if and only if A22 isinvertible and ðA11 � A12A
�122 A21Þ is Schur stable (Lewis
1986; Dai 1989). The invertibility of A22 guarantees theregularity of the system and its causality while the
1014 G.I. Bara
Dow
nloa
ded
by [
Was
hing
ton
Uni
vers
ity in
St L
ouis
] at
21:
56 0
5 O
ctob
er 2
014

second condition guarantees the stability of the finite
modes.
Sufficiency: The inequality (9) can be rewritten as
He
Q=2 0 0
X2A21 X2A22 0
GA11þX3A21 GA12þX3A22 G�Q=2
2664
3775
8>><>>:
9>>=>>;40:
ð10Þ
We deduce from (10), based on Schur complement,
that He{X2A22}5 0 which implies, by Lemma A.2,
that A22 is invertible. Moreover, by left- and right-
multiplying inequality (10) by
Bdiag Ir,0 Ir
In�r 0
� �
and its transpose, respectively, and by applying
Lemma A.1, we obtain
Q ð?Þ
G ~A Gþ GT �Q
" #4 0,
where ~A ¼ A11 � A12A�122 A21: ð11Þ
Based on the stability results presented in de
Oliveira et al. (1999), this last inequality implies the
stability of ~A.
Necessity: The matrix ~A ¼ A11 � A12A�122 A21 is stable
if and only if there exist a symmetric matrix Q and a
general matrix G of appropriate dimensions such that
(11) holds (de Oliveira et al. 1999). Therefore, there
exists a sufficiently small positive scalar �4 0 such that
Q ð?Þ
G ~A Gþ GT �Q
" #4�
2B diagðAT
21A21, 0Þ: ð12Þ
Let X2 ¼ �AT22. Then, as A22 is invertible, we
have X2A22 þ AT22X
T2 ¼ 2�AT
22A22 positive-definite.
Moreover, we have
�
2AT
21A21 ¼ AT21X
T2
�X2A22 þ AT
22XT2
��1X2A21:
Hence, the inequality (12) is equivalent, by Schur
complement, to
Q ~ATGT AT21X
T2
G ~A Gþ GT �Q 0
X2A21 0 X2A22 þ AT22X
T2
2664
37754 0:
Let X1 ¼ �GA12A�122 then 0¼GA12þX1A22 and
G ~A¼GA11þX1A21. Now, we replace the blocks
(2,1), (3,2), (1,2) and (2,3) of the last inequality by
these relations. Left- and right-multiplications by
Bdiag Ir,0 Ir
In�r 0
� �
and its transpose, respectively, lead to the
inequality (9). œ
Remark 3: The dual form of (9) can be obtained by
replacing SAT with (SAT)T.
A necessary and sufficient condition for the
admissibility analysis of LTI descriptor systems has
been proposed by Lee, Chen, and Fang (2004) using a
slack variables approach. Their condition involves two
slack variables which are coupled with the system state
matrix. Therefore, because of these two couplings, the
use of this condition for control design causes a
numerical solvability issue. For instance, the synthesis
of state-feedback controllers becomes a nonlinear
design problem. Compared to the result proposed by
Lee et al. (2004), our condition of Theorem 4.1
involves only one coupling between one slack variable
and the system state matrix. This advantage allows to
obtain a necessary and sufficient LMI condition for the
state-feedback control design as stated in the following
theorem.
Theorem 4.2: There exists a descriptor state-feedback
control law u(t)¼Kx(t) guaranteeing the admissibility of
the closed-loop system if and only if there exist a
symmetric matrix Q2 IRr�r and general matrices
G2 IRr�r, X12 IR(n� r)�r, X22 IR
(n� r)� (n� r) and
R2 IRm�n such that the following LMI condition holds:
He
(SAT
0 0
0 X2
" #
þSBR0 0
0 In�r
" #)þ
Q 0
0 0
" #8>>>>><>>>>>:
9>>>>>=>>>>>;
ð?Þ
SATG
X1
" #þSBR
Ir
0
" # !T
GþGT�Q
26666666666664
3777777777777540:
ð13Þ
Proof: By applying the dual form of Theorem 4.1 to
the closed-loop system whose dynamical equation is
Ex(kþ 1)¼ (AþBK )x(k) and by making the change of
variable R ¼ KT G 0X1 X2
h i, we obtain the condition (13)
since
0 0
0 X2
� ¼
G 0
X1 X2
� 0 0
0 In�r
�
International Journal of Control 1015
Dow
nloa
ded
by [
Was
hing
ton
Uni
vers
ity in
St L
ouis
] at
21:
56 0
5 O
ctob
er 2
014

and
G
X1
� ¼
G 0
X1 X2
� Ir
0
� :
œ
Remark 4: When the matrix X2 provided by theLMI condition (13) is nonsingular, the descriptor
state-feedback gain is computed as
K ¼ R G 0X1 X2
h i�1T�1. When X2 is singular, we can
obtain an invertible solution as follows. The matricesQ, G, X1, X2 and R, solutions of (13), are used in order
to obtain a scalar �2 (0, 1) such that (13) holds whenX2 is replaced by X2þ �In�r. Note that such a � alwaysexists and the feedback gain is given by
K ¼ RG 0
X1 X2 þ �In�r
� �1T�1:
4.2 Polytopic systems
In order to distinguish the case of time-varying
parameters from the case of time-invariant ones, letus define the following indicator function q:
q ¼1 for time-invariant parameters,
0 for time-varying parameters.
�
The following theorem states sufficient LMI con-ditions for poly-quadratic admissibility of singular
discrete-time polytopic systems involving two slackvariables.
Theorem 4.3 (Poly-quadratic admissibility): Thesystem (1) is poly-quadratically admissible if one of the
following conditions is satisfied:
(i) There exist symmetric positive-definite matrices
Q1,Q2, . . . ,QN2 IRr�r and general matrices
F,G2 IRr�r, X1,X32 IR(n� r)�r and X22
IR(n� r)� (n� r) such that
HeF X3
0 X2
" #SAiT
( )þ
Qi 0
0 0
" #ð?Þ
G X1
� �SAiTþ FT 0
� � GþGT��qQi
þð1� qÞQj
�( )
2666664
3777775
40 8ði, j Þ 2 I �I ð14Þ
where S and T are given by (5).(ii) There exist symmetric positive-definite matrices
Q1,Q2, . . . ,QN2 IRr�r and general matrices
F,G2 IRr�r, X1,X32 IRr�(n�r) and X22
IR(n� r)� (n� r) such that
He SAiTF 0
X3 X2
" #( )
þqQi þ ð1� qÞQj 0
0 0
" #8>>>>><>>>>>:
9>>>>>=>>>>>;
SAiTG
X1
" #þ
FT
0
" #
ð?Þ GþGT�Qi
2666666664
3777777775
40 8ði, j Þ 2 I � I : ð15Þ
Proof
Condition (i): As the matrices Qi are positive-definte,
any polytopic combination of these matrices is also
positive-definite which shows the positive-definiteness
of Q(�). Multiplying inequalities (14) by �i�j and
summing for i from 1 to N and for j from 1 to N we
obtain
HeF X3
0 X2
� SAð�ÞT
� �
þQð�Þ 0
0 0
� 8>>><>>>:
9>>>=>>>;
ð?Þ
G X1
� �SAð�ÞTþ FT 0
� � GþGT��qQð�Þ
þ ð1� qÞQþð�Þ�
( )
26666666664
37777777775
40, ð16Þ
where Qð�Þ ¼Pi¼N
i¼1 �iPi and Qþð�Þ ¼Pj¼N
j¼1 �jPj.
Inequality (16) can be rewritten as
Using similar arguments to the ones presented in
the proof of Theorem 4.1, this last inequality implies
the invertibility of matrix A22(�) and
He�F ~Að�Þ
þQð�Þ ð?Þ
G ~Að�Þ þ FTGþ GT �
�qQð�Þ
þ ð1� qÞQþð�Þ�
( )2664
37754 0:
Left- and right-multiplying this inequality by
Ir � ~ATð�Þ� �
and its transpose, respectively, implies
that Q(�)� ~AT(�)((qQ(�)þ (1� q)Qþ(�)) ~A(�)4 0
He
FA11ð�Þ þ X3A21ð�Þ þQð�Þ=2 FA12ð�Þ þ X3A22ð�Þ 0
X2A21ð�Þ X2A22ð�Þ 0
GA11ð�Þ þ X1A21ð�Þ þ FT GA12ð�Þ þ X1A22ð�Þ G��qQð�Þ þ ð1� qÞQþð�Þ
�=2
264
375
8><>:
9>=>;4 0:
1016 G.I. Bara
Dow
nloa
ded
by [
Was
hing
ton
Uni
vers
ity in
St L
ouis
] at
21:
56 0
5 O
ctob
er 2
014

which guarantees the stability of ~A(�) whether the
parameters are constant or time-varying.
Condition (ii): Following similar arguments to the
ones of the proof of condition (i), inequalities (15)
imply the invertibility of A22(�) and
He�
~Að�ÞF þ qQð�Þ
þ ð1� qÞQþð�Þ
( )~Að�ÞGþ FT
ð?Þ Gþ GT �Qð�Þ
2664
37754 0:
Left- and right-multiplying this inequality by
Ir � ~ATð�Þ� �
and its transpose, respectively, we
deduce the stability of ~A(�) by applying Schur
complement. œ
Remark 5: Note that in the case of standard state-
space systems i.e. E¼ In, when the parameters are time-
invariant, Theorem 4.3 covers the results presented by
de Oliveira et al. (1999), by fixing F¼ 0, and also those
presented by Peaucelle et al. (2000).
Remark 6: Theorem 4.3 presents two alternative sets
of LMI conditions for poly-quadratic admissibility
analysis which are not dual to each other. In the case of
robust design, unlike the case of LPV synthesis, as
mentioned in the introduction, it has been shown by
Blanchini and Miani (2003, 2010) that the duality
between state estimation and state-feedback control
does not hold. Our Theorem 4.3 tackles this fact by
proposing separate sets of admissibility analysis con-
ditions exploitable for each case: the first one can be
exploited for state estimation purposes while the
second one for state-feedback control. Note that this
has been achieved by considering a dilation only on the
dynamical part of the system.
The conditions of Theorem 4.3 involve the trans-
formation matrices S and T. As these matrices are not
unique, we show in the following that the feasibility of
(14) or (15) is independent of the particular realisation
of these matrices.
Theorem 4.4: If conditions (14) or (15) of Theorem 4.3
are feasible for a pair (S,T ) satisfying (5) then they are
also feasible for any pair (S,T) satisfying (5).
Proof: Since the pairs (S,T ) and (S,T) satisfy (5),
then
SET ¼ SET ¼Ir 0
0 0
" #which implies that
Ir 0
0 0
" #¼ SS
�1Ir 0
0 0
" #T�1T:
ð17Þ
By denoting
SS�1¼S11 S12
S21 S22
" #and T
�1T ¼T 11 T 12
0 T 22
" #
sinceT andT are upper block-triangular, it follows from
equality (17) that S11T 11¼ Ir, S11T 12¼ 0, S21T 11¼ 0
and S21T 12¼ 0. As the invertibility of T 11 is
guaranteed by the invertibility of T�1T, we obtain that
S11 ¼ T�111 , S21 ¼ 0 and T 12 ¼ 0: ð18Þ
From these equations, we deduce that:
SAiT ¼ SS�1
SAiTT�1T
¼T�111 S12
0 S22
" #SAiT
T 11 0
0 T 22
" #: ð19Þ
Assume that conditions (14) are feasible for the pair
(S,T ). Denote Q1,Q2, . . . ,QN, F,G, X1, X3 and X2 the
solutions of these LMI conditions. Then, by pre- and
post-multiplying inequalities (14) by
B diagT�T11 0
0 T�T22
" #, T �T11
!
and its transpose, respectively, and using relations
(18)–(19), we obtain
HeF X3
0 X2
" #SAiT
( )þ
Qi 0
0 0
" #ð?Þ
G X1
� �SAiTþ F
T 0� � GþG
T� qQi
þð1� qÞQj
( )2666664
3777775
40 8ði, j Þ 2 I �I ð20Þ
where F ¼ T�T11 F T �111 , G ¼ T
�T11 GT
�111 , Qi ¼
T�T11 QiT
�111 , X1 ¼ T
�T11 ðGS12 þ X1S22Þ, X3 ¼ T
�T11 �
ðFS12 þ X3S22Þ and X2 ¼ T�T22 X2S22. Hence, it follows
that (14) are also feasible for the pair (S,T).We can prove in a similar way that the feasibility of
(15) for a pair (S,T ) satisfying (5) implies its feasibility
for any pair (S,T) satisfying (5). œ
Based on Theorem 4.3 and assuming that
the parameters are uncertain, we present a robust
poly-quadratic causal stabilisability condition for
system (1).
Corollary 4.5 (Robust state-feedback control): The
system is robustly, poly-quadratically and causally
stabilisable by state-feedback if there exist symmetric
positive-definite matrices Qi2 IRr�r for i2 {1, . . . ,N}, a
scalar � and general matrices G2 IRr�r, X12 IR(n� r)�r,
International Journal of Control 1017
Dow
nloa
ded
by [
Was
hing
ton
Uni
vers
ity in
St L
ouis
] at
21:
56 0
5 O
ctob
er 2
014
X22 IR(n� r)� (n� r) and R2 IRm�n such that the follow-
ing conditions hold:
He
( SAiT
G 0
X1 X2
" #
þSBiR
!�Ir 0
0 In�r
" #)
þqQiþð1� qÞQj 0
0 0
" #
8>>>>>>>>>>><>>>>>>>>>>>:
9>>>>>>>>>>>=>>>>>>>>>>>;
ð?Þ
SAiT
G
X1
" #þSBiR
Ir
0
" #�T
þ� G 0� �
8>><>>:
9>>=>>; GþGT�Qi
266666666666666666664
377777777777777777775
40
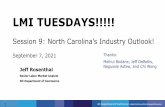
8ði, j Þ 2 I �I : ð21Þ
Remark 7: The inequality conditions (21) ofCorollary 4.5 are not linear in the unknown variablesbut they become linear whenever the scalar � is fixeda priori. Since � is a scalar, a solution to these inequalityconditions can be obtained by iteratively increasing thevalue of � between predefined minimum and maximumvalues while solving for the other unknown variables.Note that �¼ 0 corresponds to the choice F¼ 0 andX3¼ 0 in Theorem 4.3 while �¼ 1 corresponds to F¼Gand X3¼X1 in Theorem 4.3. Introducing the scalar �may be seen as a trade-off between these two cases.
When the solution X2 obtained by solving condi-tions (21) is nonsingular, the descriptor state-feedbackgain is given by
K ¼ RG 0
X1 X2
� �1T�1:
When X2 is singular, the solutions Qi, G, X1, X2 and Rof (21) are used in order to obtain a scalar �2 (0, 1)such that (21) holds when X2 is replaced by X2þ �In�r.Note that such a � always exists. Therefore, thefeedback gain is given by
K ¼ RG 0
X1 X2 þ �In�r
� �1T�1:
When the parameters are not uncertain and areassumed measurable, we can exploit the parametersmeasurability and design a polytopic state-feedbackcontroller such that the closed-loop system is poly-quadratically admissible. This, first, requires thetransformation of the polytopic system (1) into apolytopic system with a constant control matrix byintroducing an augmented descriptor state vector (seeMasubuchi et al. (2003, 2004) for more details). Then,as a second step, we apply the following synthesisconditions.
Corollary 4.6 (Polytopic state-feedback control): The
system is poly-quadratically and causally stabilisable by
polytopic state-feedback if there exist symmetric posi-tive-definite matrices Qi2 IR
r�r for i2I , a scalar � andgeneral matrices G2 IRr�r, X12 IR
(n� r)�r, X22
IR(n� r)� (n� r) and Ri2 IRm�n for i2I such that the
following conditions hold:
He
�SAiT
G 0
X1 X2
�
þSBRi
��Ir 0
0 In�r
� �
þqQiþð1� qÞQj 0
0 0
�
8>>>>>>>><>>>>>>>>:
9>>>>>>>>=>>>>>>>>;
ð?Þ
SAiT
G
X1
� þSBRi
Ir
0
� �T
þ� G 0� �
8><>:
9>=>; GþGT�Qi
266666666666666664
377777777777777775
40
8ði, j Þ 2 I �I : ð22Þ
When the solution X2 obtained by solving the LMIconditions (22) is nonsingular, the descriptor state-
feedback gains are given by
Ki ¼ Ri
G 0
X1 X2
� �1T�1:
When X2 is singular, the solutions Qi, G, X1, X2 and Ri
of (22) are used in order to obtain a scalar �2 (0, 1) suchthat (22) holds when X2 is replaced by X2þ �In�r.Therefore, the feedback gains are given by
Ki ¼ Ri
G 0
X1 X2 þ �In�r
� �1T�1:
Remark 8: Some results dealing with the robust
analysis of uncertain polytopic discrete-time descriptorsystems have been reported by Fang (2002) and Kuo
and Fang (2003) These results are applicable only forsystems with time-invariant uncertainties. To our
knowledge, there are no results reported in the
literature in the case of time-varying polytopicuncertainties (except the ones proposed by Chadli
et al. (2008a,b), which have been shown to beerroneous in Section 3). Fang (2002) employed
PDLF in order to obtain less conservative robustadmissibility analysis conditions which are formulated
as a non-strict LMI feasibility problem. Note that therobust control design problem has not been addressed
and the proposed analysis conditions are very difficultto apply for control design. Indeed, due to numerous
couplings between the Lyapunov matrices and thevertices of the system state matrix polytope, these
analysis conditions lead, when employed for control
purposes, to trilinear inequalities which are very
1018 G.I. Bara
Dow
nloa
ded
by [
Was
hing
ton
Uni
vers
ity in
St L
ouis
] at
21:
56 0
5 O
ctob
er 2
014

difficult to linearise. Kuo and Fang (2003) presented
an admissibility analysis condition, also proposed byLee et al. (2004) for LTI systems, that involves two
slack variables. Unfortunately, this condition is basedon a common Lyapunov function for the wholeuncertainty domain and therefore, it is conservative.
Moreover, only the robust static output feedbackcontrol has been discussed. Our admissibility analysisresults admit time-varying parameters and use PDLF
as well as two slack variables. These results have beendeveloped with the objective in mind of easilydesigning robust state-feedback controllers. In order
to deal with the absence of duality between state-feedback control and state estimation problems in thecase of uncertain parameters, our approach employs a
dilation only on the dynamical part of the system. As aconsequence, the results proposed in our article can beexploited for robust design as well as LPV synthesis.
5. Numerical examples
5.1 Numerical examples for time-invariantparameters
We consider here that the uncertain parameters aretime-invariant and we provide several numerical
examples in order to evaluate the performance of ouradmissibility analysis results in comparison with theones proposed by Fang (2002) and Kuo and Fang
(2003). These numerical examples were randomlygenerated for different values of N (number ofvertices), n (dimension of the state vector) and r
(number of dynamical state variables). In the follow-ing, we investigate the admissibility of the convex hull
Co(�(A1, . . . ,AN)) for different values of � with thepurpose of evaluating the admissibility domain guar-anteed by the methods in Fang (2002) and Kuo and
Fang (2003) and our Theorem 4.3(i)–(ii).First, consider a polytopic uncertain descriptor
system with N¼ 2 vertex matrices
A1 ¼
0:2594 0:0018 0:0590 �0:1570 0:0102
0:2595 �0:0292 0:1574 0:1396 0:1095
0:0121 �0:1374 0:0562 �0:0293 0:0628
0:0926 �0:1718 �0:1722 0:1146 0:0722
0:0027 �0:1101 �0:0296 0:0729 0:0542
26666664
37777775
and
A2 ¼
�0:3612 �0:2867 0:3450 0:3837 0:5281
0:3114 �0:4251 �0:1279 �0:2867 �0:1527
0:4565 �0:1678 �0:1794 0:2067 �0:0681
�0:3353 0:4063 0:0141 0:6519 0:1313
�0:0218 0:7138 �0:1451 0:0992 0:4533
26666664
37777775
and E¼Bdiag(I3, 0). Based on the root-locus of the
finite modes of the descriptor system, we identified the
largest possible admissibility domain which is given by
�RL¼ 1.999. The method in Fang (2002), exploiting
PDLFs, succeeded for the maximum bound �¼ 1.703
while the method in Kuo and Fang (2003), involving
only slack variables, succeeded for all �� 1.068. Our
Theorem 4.3(i) and (ii) guarantees the admissibility of
the system for the maximum bound �¼ 1.827 and
�¼ 1.801, respectively.Second, consider a polytopic uncertain descriptor
system defined by the following N¼ 3 vertex
matrices Ai:
A1 ¼
0:0248 0:2201 �0:1472 �0:2277 0:0387
0:2275 �0:0767 0:0767 �0:0626 �0:0440
0:0442 0:0466 0:0938 �0:1470 0:0949
0:0223 0:1898 0:0151 �0:1052 �0:2549
�0:0125 �0:2178 0:0815 �0:2472 0:1321
266666664
377777775,
A2 ¼
0:3567 0:3709 0:7896 �0:3370 1:1710
0:1948 0:3811 0:1587 0:0232 0:5549
�0:5563 �0:1224 0:4842 �0:1492 0:1469
0:3336 0:8812 �0:5565 0:6562 0:0446
1:1669 �0:3536 0:0632 0:2750 0:9339
266666664
377777775
and
A3 ¼
0:1949 0:1114 0:0837 �0:3888 �0:0733
�0:0248 �0:4704 0:3497 0:0521 0:1290
�0:0252 �0:1563 �0:2602 0:2649 0:3457
0:0482 �0:0678 0:0674 �0:1122 �0:2558
0:0017 0:2108 �0:0577 0:0213 0:1153
266666664
377777775:
The singular matrix E is B diag(I4, 0). Based on the
root-locus of the finite modes of the descriptor system,
we were able to find the largest value �RL¼ 1.399 for
which the system is admissible. The method proposed
by Kuo and Fang (2003) provided the maximum bound
�¼ 0.923 while the application of the result of Fang
(2003) using PDLFs gave �¼ 1.293. The implementa-
tion of LMI conditions of Theorem 4.3(i)–(ii) provided
�¼ 1.360 and �¼ 1.367, respectively.Third, consider the descriptor system defined by
N¼ 4 vertices
A1 ¼
0:3628 �0:0255 �0:0081
�0:0599 0:1126 0:1863
0:3583 0:0902 0:1055
264
375,
A2 ¼
�0:2347 �0:1528 �0:1482
�0:4586 0:1375 0:1526
0:0819 0:2396 0:0240
264
375,
International Journal of Control 1019
Dow
nloa
ded
by [
Was
hing
ton
Uni
vers
ity in
St L
ouis
] at
21:
56 0
5 O
ctob
er 2
014

A3 ¼
�0:0462 0:0966 0:2321
0:1239 0:1246 0:1067
�0:0407 0:1644 0:0826
264
375,
A4 ¼
�0:0408 �0:0675 0:0981
�0:0137 0:0476 0:0718
�0:0730 0:0314 0:0262
264
375
and E¼Bdiag(I1, 0). Kuo and Fang (2003) and Fang
(2002) provided the maximum bound �¼ 0.935 and
�¼ 1.107, respectively. Theorem 4.3(i) and (ii) suc-
ceeded for all �� 1.184. Note that for this example, our
analysis results identified the largest possible admissi-
bility domain which is given by the root-locus of the
finite modes of the descriptor system.All these results are summarised in Table 1. In
addition, in this table, we also indicate the percentage
of the largest possible admissibility radius �RL,obtained by using the root-locus of the finite modes
of the system, identified by each method. From several
tens of tests we have conducted on randomly generated
systems, we can say that, in the case of time-invariant
parameters, our admissibility analysis conditions are
less restrictive than the ones proposed by Kuo and
Fang (2003). For the numerical examples presented
above, our admissibility analysis results performed
better than the one proposed by Fang (2002). We can
see that our approach improved the relative admissi-
bility radius by about 5–6.5% compared to the one of
Fang (2002). However, there are also situations, as the
one presented in the next example (Section 5.2), where
our conditions and the result of Fang (2002) provided
the same admissibility domain as well as situations
where Fang (2002) provided a larger admissibility
radius than our approach. In this latter case the
improvement is quite comparable with the improve-
ment provided by our approach for the above
numerical examples. Therefore, we can say that our
admissibility analysis results and the ones of Fang(2002) are alternative results. Note also that anotheradvantage of the admissibility analysis conditionsproposed in our paper, compared to the ones ofFang (2002), is that they can be easily exploited forsynthesis purposes. Indeed, employing the admissibilityconditions of Fang (2002) for state-feedback controldesign or state estimation leads to trilinear matrixinequalities which are very difficult to linearise in orderto solve the synthesis problem. This is not the casewhen using our analysis conditions which can be easilyexploited for state estimation or state-feedback controlas shown next.
5.2 Numerical example for time-varying parameters
Consider a parameter-dependent descriptor systemwhose state matrices are
E ¼ BdiagðI3, 0Þ,
Að�Þ ¼
0:5 �0:1� 0:7 1
0 �0:2 0 �2
0 �0:5� 0:5� 0 0
0:3 0 0 1
2666664
3777775 and
Bð�Þ ¼
1
�0:2�
0:3
0:5þ �
2666664
3777775:
We assume that the parameter is bounded j�j � �. Thismeans that the parameter-dependent descriptor systemallows a polytopic representation as in (1) withA1¼A(��), A2¼A(�), B1¼B(��) and B2¼B(�).
When the parameter is time-invariant, based on theroot-locus of the finite modes of the descriptor system,
Table 1. Largest admissibility radius evaluated based on the root locus, Fang (2002) and Kuo and Fang (2003) andTheorem 4.3.
System 1 System 2 System 3
N 2 3 4
Maximum � by root-locus ¼ �RL 1.999 1.399 1.184� maximum based onKuo and Fang (2003)
Absolute value 1.068 0.923 0.935Per cent of �RL 53.4% 65.9% 78.9%
� maximum based onFang (2002)
Absolute value 1.703 1.293 1.107Per cent of �RL 85.1% 92.4% 93.5%
� maximum based onTheorem 4.3(i)
Absolute value 1.827 1.360 1.184Per cent of �RL 91.4% 97.2% 100%
� maximum based onTheorem 4.3(ii)
Absolute value 1.801 1.367 1.184Per cent of �RL 90.1% 97.7% 100%
1020 G.I. Bara
Dow
nloa
ded
by [
Was
hing
ton
Uni
vers
ity in
St L
ouis
] at
21:
56 0
5 O
ctob
er 2
014

the largest admissibility region corresponds to
�¼ 3.3604. The method proposed by Kuo and Fang
(2003) provided the maximum bound �¼ 3.2519 while
the application of the result of Fang (2002) and our
Theorem 4.3(i)–(ii) provided the maximum bound
�¼ 3.3601. For this system, our method and the one
in Fang (2002) identified the same admissibility region.
However, unlike the result of Fang (2002) whose
application to state-feedback control leads to trilinear
matrix inequalities, our analysis result is easily exploi-
table for control design purposes as shown in the
following. When the parameters are time-varying, the
root-locus of finite modes cannot be used anymore in
order to evaluate the maximum value of � guaranteeingthe stability. Our conditions of Theorem 4.3(i)–(ii)
guarantee a maximum bound �¼ 3.307.Assuming the parameters are time-varying and
uncertain, a robust state-feedback controller can be
designed using Corollary 4.5. The maximum value of �for which the system is robustly, poly-quadratically
and causally stabilisable by state-feedback based on
Corollary 4.5 is 3.5707 and it has been obtained for
�¼ 0.1.When the parameters are not uncertain but
measurable, a parameter-dependent state-feedback
controller may be obtained by applying Corollary 4.6.
In order to do so, we transform the system into a
descriptor system with a constant control matrix.
By introducing the additional variables 1¼ u and
2¼ �u¼ �1, we obtain an augmented descriptor state
vector ~x ¼ xT 1 2� �T
. Therefore, the parameter-
dependent system is equivalent to the augmented
descriptor system defined by the following matrices:
~E ¼E 0
0 0
� , ~Að�Þ ¼
Að�Þ 0 B01
0 1 0
0 �� 1
264
375 and
~B ¼
B00
�1
0
264
375,
where B00 and B01 are such that B(�)¼B00þ �B01.~A(�) evolves into a polytope whose vertices are ~A(��)and ~A(�). The maximum value of � for which the
conditions of Corollary 4.6 are feasible is 3.5772 and it
has been obtained for the same �¼ 0.1. For this
maximum value of �, the vertices of the polytopic
controller gain are
K1 ¼ �0:2873 1:6666 �0:0027 �0:5896�124:6454 �0:7939
�,
K2 ¼ �0:3001 2:0224 �0:0333 �0:7485�118:4508 �0:7496
�,
and the polytopic parameters are �1 ¼���2� and
�2 ¼�þ�2� . This provides the parameter-dependent gain
Kð�Þ ¼ ½�0:2937�0:0018� 1:8445þ0:0497�
�0:0180�0:0043� �0:6690�0:0222�
121:5481�0:8658� �0:7717þ0:0062� �
for the state-feedback control of the augmenteddescriptor system. Since the control law uðkÞ ¼Kð�Þ ~xðkÞ uses the augmented descriptor vector, wecan eliminate the additional descriptor variables 1 and2 in order to obtain an explicit formulation of thecontrol law as a function of the descriptor statevector x. This provides
uðkÞ ¼1
�0:0062�2 þ 1:6376�� 120:5481
� ½�0:2937� 0:0018� 1:8445þ 0:0497�
�0:0180� 0:0043� �0:6690� 0:0222� �xðkÞ:
6. Conclusion
In this article, the problem of admissibility analysis andstate-feedback control for polytopic discrete-timedescriptor systems has been addressed. Using a slackvariables approach, we have proposed a new necessaryand sufficient condition for the admissibility analysis ofdiscrete-time LTI descriptor systems. This condition isexpressed as a strict LMI feasibility problem and leadsto a linear necessary and sufficient condition for thestate-feedback control design. This new condition hasbeen extended to poly-quadratic admissibility, whichinvolves PDLFs, of polytopic systems with possiblytime-varying parameters. Considering a dilation onlyon the dynamical part of the descriptor system allowedus to tackle the absence of duality between stateestimation and state-feedback control in the case ofuncertain parameters and to propose separate admis-sibility analysis conditions exploitable for each case.The application of these analysis results to the robuststate-feedback control and polytopic state-feedbackcontrol has also been presented in this article. The mainadvantage of the approach proposed in this article is thedevelopment of analysis results which are not morerestrictive than the results already proposed in theliterature for the time-invariant case as supported byour numerical examples and, especially, are easilyexploitable for robust design as well as LPV synthesis.
Acknowledgements
The author thanks the Associate Editor, Professor DavidWilson, who handled this article and the anonymous
International Journal of Control 1021
Dow
nloa
ded
by [
Was
hing
ton
Uni
vers
ity in
St L
ouis
] at
21:
56 0
5 O
ctob
er 2
014
reviewers for their valuable and helpful comments andsuggestions for improving the quality of this article.
Note
1. A function V(x) is decrescent if there exists a positiveconstant � such that V(x)5��xTx.
References
Bara, G.I. (2010), ‘Dilated LMI Conditions for the Robust
Analysis of Uncertain Parameter-dependent Descriptor
Systems’, in Proceedings of the 2010 American Control
Conference, Baltimore, MD, USA, 30 June–2 July,
pp. 5451–5457.
Blanchini, F., and Miani, S. (2003), ‘Stabilization of LPV
Systems: State Feedback, State Estimation and Duality’,
in Proceedings of the 42nd IEEE Conference on Decision
and Control, Maui, HI, USA, pp. 1492–1497.Blanchini, F., and Miani, S. (2010), ‘Gain Scheduling Versus
Robust Control of LPV Systems: the Output Feedback
Case’, in Proceedings of the 2010 American Control
Conference, Baltimore, MD, USA, 30 June–2 July,
pp. 3871–3876.Boyd, S., El Ghaoui, L., Feron, E., and Balakrishnan, V.
(1994), Linear Matrix Inequalities in System and
Control Theory, Studies in Applied Mathematics
(Vol. 15), Philadelphia, PA: Society for Industrial and
Applied Mathematics (SIAM).Chadli, M., Daafouz, J., and Darouach, M. (2008b),
‘Stabilisation of Singular LPV Systems’, in Proceedings
of the 17th IFAC World Congress, Seoul, Korea,
pp. 9999–10002.
Chadli, M., Darouach, M., and Daafouz, J. (2008a), ‘Static
Output Stabilisation of Singular LPV Systems: LMI
Formulation’, in Proceedings of the 47th IEEE
Conference on Decision and Control, Cancun, Mexico,
pp. 4793–4796.
Daafouz, J., and Bernussou, J. (2001), ‘Parameter Dependent
Lyapunov Functions for Discrete Time Systems with Time
Varying Parametric Uncertainties’, Systems and Control
Letters, 43, 355–359.Dai, L. (1989), Singular Control Systems, Lecture Notes in
Control and Information Sciences, Berlin: Springer-Verlag.de Oliveira, M., Bernussou, J., and Geromel, J. (1999), ‘A
New Discrete-time Robust Stability Condition’, Systems
and Control Letters, 37, 261–265.de Souza, C.E., Barbosa, K.A., and Fu, M. (2008), ‘Robust
Filtering for Uncertain Linear Discrete-time Descriptor
Systems’, Automatica, 44, 792–798.
Fang, C.H. (2002), ‘Stability Robustness Analysis of
Uncertain Descriptor Systems – an LMI Approach’,
in Proceedings of the 41st IEEE Conference on
Decision and Control, Las Vegas, NV, USA,
pp. 1459–1460.
Feron, E., Apkarian, P., and Gahinet, P. (1996),
‘Analysis and Synthesis of Robust Control Systems via
Parameter-dependent Lyapunov Functions’, IEEE
Transactions on Automatic Control, 41, 1041–1046.Gahinet, P., Apkarian, P., and Chilali, M. (1996), ‘Affine
Parameter-dependent Lyapunov Functions and Real
Parametric Uncertainty’, IEEE Transactions on
Automatic Control, 41, 436–442.Gao, L., Chen, W., and Sun, Y. (2003), ‘On Robust
Admissibility Condition for Descriptor Systems with
Convex Polytopic Uncertainty’, in Proceedings of the
2003 American Control Conference, Denver, CO, USA,
pp. 5083–5088.Kuo, C.H., and Fang, C.H. (2003), ‘An LMI Approach to
Admissibilization of Uncertain Descriptor Systems via
Static Output Feedback’, in Proceedings of the 2003
American Control Conference, Denver, CO, USA,
pp. 5104–5109.
Lee, L., Chen, J.L., and Fang, C.H. (2004), ‘On LMI
Approach to Admissibilization of Discrete-time
Descriptor Systems’, in Proceedings of the 5th Asian
Control Conference, Melbourne, Australia,
pp. 1001–1008.
Lewis, F. (1986), ‘A Survey of Linear Singular Systems’,
Circuits Systems Signal and Processing, 5, 3–36.
Masubuchi, I., Akiyama, T., and Saeki, M. (2003), ‘Synthesis
of Output Feedback Gain-scheduling Controllers Based on
Descriptor LPV System Representation’, in Proceedings of
the 42nd IEEE Conference on Decision and Control, Maui,
HI, USA, pp. 6115–6120.Masubuchi, I., Kato, J., Saeki, M., and Ohara, A. (2004),
‘Gain-scheduled Controller Design Based on Descriptor
Representation of LPV System: Application to Flight
Vehicle Control’, in Proceedings of the 43rd IEEE
Conference on Decision and Control, Bahamas,
pp. 815–820.Mills, J., and Goldenberg, A. (1989), ‘Force and Position
Control of Manipulation During Constrained Motion
Tasks’, IEEE Transactions on Robotics and Automation,
5, 30–46.Peaucelle, D., Arzelier, D., Bachelier, O., and Bernussou, J.
(2000), ‘A New Robust D-stability Condition for Real
Convex Polytopic Uncertainty’, Systems and Control
Letters, 40, 21–30.Rejichi, O., Bachelier, O., Chaabane, M., and Mehdi, D.
(2008), ‘Issibility and State Feedback Admissibilization
of Discrete Singular Systems: an LMI Approach’,
in Proceedings of the 16th Mediterranean Conference
on Control and Automation, Ajaccio, France, June
25–27.
Rugh, W.J., and Shamma, J.S. (2000), ‘Research on Gain
Scheduling’, Automatica, 36, 1401–1425.
Sakuwa, R., and Fujisaki, Y. (2005), ‘Robust Stability
Analysis of Single-paramter Dependent Descriptor
Systems’, in Proceedings of the 44th IEEE Conference on
Decision and Control, and the European Control
Conference, Seville, Spain, pp. 2933–2938.
Xu, S., and Lam, J. (2004a), ‘Robust Stability and
Stabilisation of Discrete Singular Systems: an Equivalent
Characterisation’, IEEE Transactions on Automatic
Control, 49, 568–574.
1022 G.I. Bara
Dow
nloa
ded
by [
Was
hing
ton
Uni
vers
ity in
St L
ouis
] at
21:
56 0
5 O
ctob
er 2
014

Xu, S., and Lam, J. (2004b), ‘New Positive RealnessConditions for Uncertain Discrete Descriptor Systems:
Analysis and Synthesis’, IEEE Transactions on Circuits andSystems-I: Regular Papers, 51, 1897–1905.
Xu, S., and Yang, C. (2000), ‘An Algebraic Approach to theRobust Stability Analysis and Robust Stabilisation of
Uncertain Singular Systems’, International Journal ofSystems Science, 31, 55–61.
Xu, S., Yang, C., Niu, Y., and Lam, J. (2001), ‘Robust
Stabilisation for Uncertain Discrete Singular Systems’,Automatica, 37, 769–774.
Yagoubi, M., Bouali, A., and Chevrel, P. (2008),
‘Multiobjective Controller Synthesis for Parameter-dependent Descriptor Systems via Dilated LMICharacterisations’, in Proceedings of the 47th IEEEConference on Decision and Control, Cancun, Mexico,
pp. 4801–4806.
Appendix A: Complement on matrix manipulation
In the following lemmas, we state some results on matrixmanipulation.
Lemma A.1: Let M be a general matrix partitioned asA BC D
� �. If M is negative-definite (not necessarily sym-
metric) i.e. He{M}5 0 then D is invertible and theSchur complement of M relative to D is also negative-definite (not necessarily symmetric) i.e. He{A�BD�1C}5 0.
Proof: If He{M}5 0 then, by Schur complement,He{D}5 0 which implies by Lemma A.2 that D is invertible.The proof of the positive-definiteness of the Schur comple-ment of M relative to D can be found in Xu and Yang(2000). œ
Lemma A.2: Let X and Y be real square matrices. IfHe{XY}5 0 then X and Y are invertible.
International Journal of Control 1023
Dow
nloa
ded
by [
Was
hing
ton
Uni
vers
ity in
St L
ouis
] at
21:
56 0
5 O
ctob
er 2
014