
Differentialgleichungen - mathematik.uni-wuerzburg.deroth/DGL08/kapitel1.pdf · 1.3...
18
Differentialgleichungen Vorlesung Universit¨ at W¨ urzburg Sommersemester 2008 Oliver Roth Institut f¨ ur Mathematik Universit¨ at W¨ urzburg 97074 W¨ urzburg
Transcript of Differentialgleichungen - mathematik.uni-wuerzburg.deroth/DGL08/kapitel1.pdf · 1.3...

Differentialgleichungen
Vorlesung Universitat Wurzburg
Sommersemester 2008
Oliver RothInstitut fur MathematikUniversitat Wurzburg
97074 Wurzburg

Inhaltsverzeichnis
Vorwort
1 Beispiele 1
1.1 Die logarithmische Spirale . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Das n–Korper Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Rauber–Beute–Modell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.4 Oszillatoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.5 Die Lorenz–Gleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.6 Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2 Existenz– und Eindeutigkeitssatze 15
2.1 Eindeutigkeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.2 Lokale Existenz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3 Globale Existenz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.4 Die allgemeine Losung einer Differentialgleichung . . . . . . . . . . . . . . . 26
2.5 Beweise der Abhangigkeitssatze . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.6 Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3 Dynamische Systeme 37
3.1 Autonome Differentialgleichungen und Flusse . . . . . . . . . . . . . . . . . 37
3.2 Trajektorien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.3 Invariante Mengen, Erste Integrale und Hamiltonsche Systeme . . . . . . . 46
3.4 Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4 Lineare Differentialgleichungen 55
4.1 Lineare nichtautonome Systeme . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.2 Anwendungen auf nichtlineare autonome Systeme . . . . . . . . . . . . . . . 59
4.3 Lineare autonome Systeme . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
4.4 Ebene lineare Flusse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
4.5 Zerlegung des Phasenraums in invariante Unterraume . . . . . . . . . . . . 75
4.6 Lineare Differentialgleichungen hoherer Ordnung . . . . . . . . . . . . . . . 76
4.7 Lineare Differentialgleichungen mit analytischen Koeffizienten . . . . . . . . 78
4.8 Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
3

4 INHALTSVERZEICHNIS
5 Stabilitatstheorie 83
5.1 Stabilitat von Gleichgewichtspunkten . . . . . . . . . . . . . . . . . . . . . . 835.2 Grenzmengen, Attraktoren und Ljapunov–Funktionen . . . . . . . . . . . . 915.3 Hamiltonsche Systeme und Gradientensysteme . . . . . . . . . . . . . . . . 975.4 Periodische Attraktoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 985.5 Die Theorie von Poincare–Bendixon . . . . . . . . . . . . . . . . . . . . . . 1035.6 Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107

Pardon me for writing such a long letter; I had not the time to write ashort one.
Lord Chesterfield
Vorwort
Differentialgleichungen sind die Hauptwerkzeuge mit denen Wissenschaftler mathemati-sche Modelle realer Systeme erstellen. Differentialgleichungen werden u.a. eingesetzt zur
• Analyse und Vorhersage der Entwicklung von Borsenkursen;
• Steuerung von Satelliten;
• Entwicklung von Klimamodellen;
• Dosierung von Insektenschutzmitteln;
• Diagnose von Diabetes.
Nur wenige Differentialgleichungen lassen sich explizit losen. Dies sind diejenigen Glei-chungen, die man in den Standardlehrbuchern finden kann. Fur die allermeisten Differen-tialgleichungen lassen sich dagegen die Losungen nicht in expliziter Form angeben – selbstbei sehr unschuldig wirkenden Gleichungen wie x′ = x2 − t. Dies bedeutet aber nicht, dassdiese Gleichungen keine Losungen besitzen. Ein angemessener Standpunkt ist daher derfolgende:
Differentialgleichungen definieren Funktionen. Das Ziel der Theorie ist es, Me-
thoden zu entwickeln, um diese Funktionen zu verstehen, d.h. ihre Eigenschaf-
ten zu beschreiben.
Das eigentliche Ziel dieser Vorlesung ist es also nicht, Losungen von Differentialgleichungentatsachlich zu berechnen, sondern das Verhalten dieser Losungen zu analysieren.
Wir beginnen in Kapitel 1 mit der Diskussion einiger Beispiele von Differentialgleichungen(Logarithmische Spiralen, Planetenbahnen, Haifische in der Adria, Schaukeln, Ausblick aufdie Chaostheorie). Kapitel 2 beinhaltet die ubiquitaren Existenz– und Eindeutigkeitssatze.In Kapitel 3 setzen wir die Analyse nicht explizit losbarer Differentialgleichungen fort. Ei-ne Klasse tatsachlich losbarer Gleichungen (die linearen Differentialgleichungen) wird inKapitel 4 diskutiert – inklusive deren Anwendung auf nichtlineare Gleichungen. Wir be-sprechen auch die Methode des
”Potenzreihenansatzes“, ohne die grundlegende Gleichun-
gen wie die Schrodinger Differentialgleichung nicht verstanden werden konnen. Wir setzendabei keine Vorkenntnisse aus der Funktionentheorie voraus, mussen uns dafur aber aufeinen Ausschnitt des tatsachlich Machbaren einschranken. In Kapitel 5 wenden wir unsdann der sog. qualitativen Theorie und damit dem Langzeitverhalten der Losungen vonDifferentialgleichungen zu.
Diese Vorlesung beschrankt sich auf gewohnliche Differentialgleichungen. Wir behandelnkeine partiellen, stochastischen und komplexen Differentialgleichungen, fur die man Kennt-nisse aus der Funktionalanalysis, Stochastik bzw. Funktionentheorie benotigen wurde.

– Kapitel 1 –
Beispiele
1.1 Die logarithmische Spirale
Wir beginnen mit einer Fragestellung aus der Geometrie.
Problem
Welche (differenzierbaren regularen) Kurven im R2 schneiden alle Geraden durch den
Ursprung stets unter dem gleichen Winkel α 6∈ {0, π} ?
Um diese Frage zu beantworten, beachten wir zunachst, dass fur eine solche Kurve γ :[a, b] → R
2 das Argument des Vektors γ(s) entweder streng monoton zu– oder abnimmt.Im ersten Fall kann man daher die Kurve lokal mithilfe von Polarkoordinaten in der Form
γ(t) =
(
r(t) cos tr(t) sin t
)
mit einer noch zu bestimmenden Funktion r(t) schreiben. Fur den Winkel zwischen demVektor γ(t) und dem Tangentialvektor γ′(t) gilt
〈γ(t), γ′(t)〉|γ(t)| · |γ′(t)| = cos α .
Wir schreiben hierbei 〈· , ·〉 fur das Skalarprodukt und | · | fur die euklidische Norm (furVektoren im R
n). Verwendet man die Polarkoordinatendarstellung von γ(t), so ergibt sich
r′(t)√
r(t)2 + r′(t)2= cos α .
Falls cos α = 0, so ist r′ ≡ 0 und γ beschreibt eine Kreislinie. In allen anderen Fallen gilt
r′(t) = a r(t) , a =1
tan α∈ R\{0} .
Dies ist eine gewohnliche Differentialgleichung 1. Ordnung, die die gesuchte Funktion r(t)erfullen muss. Mithilfe dieser Differentialgleichung folgt
(
r(t) · e−at)′
= r′(t) e−at − a r(t) e−at ≡ 0 ,
d.h. r(t) = ceat mit einer Konstanten c ∈ R, c ≥ 0, also
γ(t) = ceat
(
cos tsin t
)
.
1
2 Kapitel 1 Beispiele
-2.0 -1.5 -1.0 -0.5 0.5 1.0 1.5 2.0
-2.0
-1.5
-1.0
-0.5
0.5
1.0
1.5
2.0
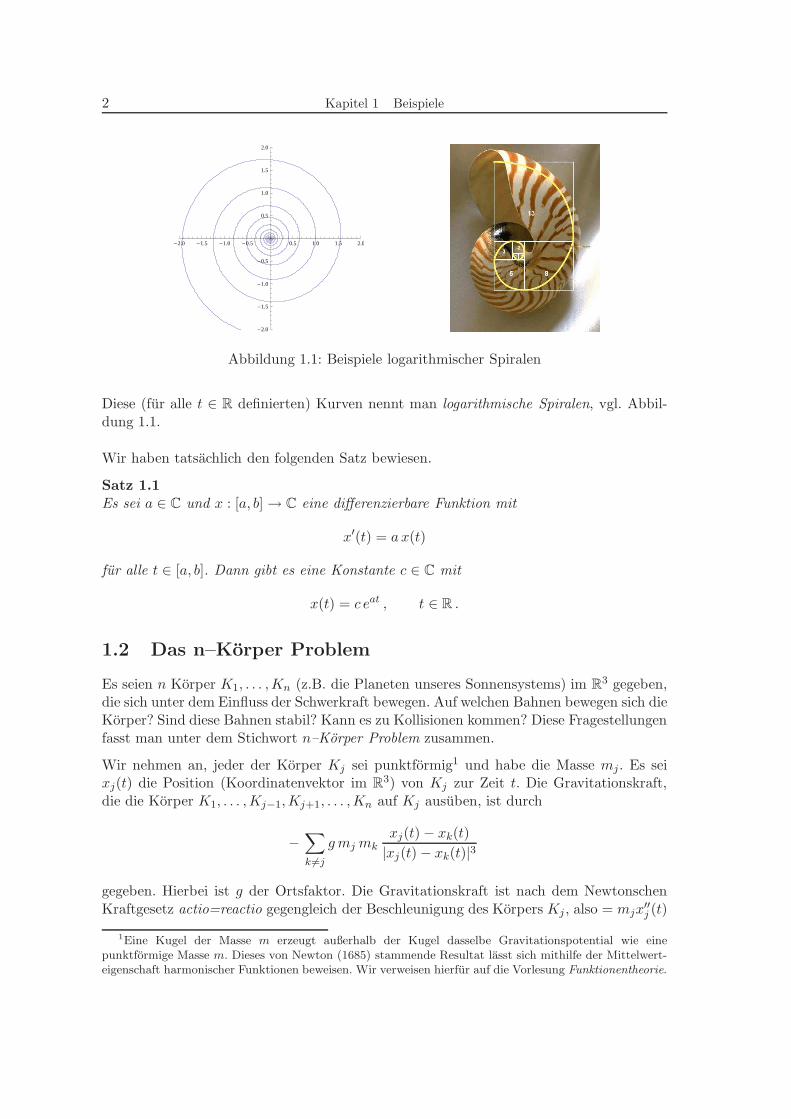
Abbildung 1.1: Beispiele logarithmischer Spiralen
Diese (fur alle t ∈ R definierten) Kurven nennt man logarithmische Spiralen, vgl. Abbil-dung 1.1.
Wir haben tatsachlich den folgenden Satz bewiesen.
Satz 1.1
Es sei a ∈ C und x : [a, b] → C eine differenzierbare Funktion mit
x′(t) = ax(t)
fur alle t ∈ [a, b]. Dann gibt es eine Konstante c ∈ C mit
x(t) = c eat , t ∈ R .
1.2 Das n–Korper Problem
Es seien n Korper K1, . . . ,Kn (z.B. die Planeten unseres Sonnensystems) im R3 gegeben,
die sich unter dem Einfluss der Schwerkraft bewegen. Auf welchen Bahnen bewegen sich dieKorper? Sind diese Bahnen stabil? Kann es zu Kollisionen kommen? Diese Fragestellungenfasst man unter dem Stichwort n–Korper Problem zusammen.
Wir nehmen an, jeder der Korper Kj sei punktformig1 und habe die Masse mj. Es seixj(t) die Position (Koordinatenvektor im R
3) von Kj zur Zeit t. Die Gravitationskraft,die die Korper K1, . . . ,Kj−1,Kj+1, . . . ,Kn auf Kj ausuben, ist durch
−∑
k 6=j
g mj mk
xj(t) − xk(t)
|xj(t) − xk(t)|3
gegeben. Hierbei ist g der Ortsfaktor. Die Gravitationskraft ist nach dem NewtonschenKraftgesetz actio=reactio gegengleich der Beschleunigung des Korpers Kj , also = mjx
′′j (t)
1Eine Kugel der Masse m erzeugt außerhalb der Kugel dasselbe Gravitationspotential wie einepunktformige Masse m. Dieses von Newton (1685) stammende Resultat lasst sich mithilfe der Mittelwert-eigenschaft harmonischer Funktionen beweisen. Wir verweisen hierfur auf die Vorlesung Funktionentheorie.

1.2 Das n–Korper Problem 3
( ′ bezeichne wieder die Ableitung nach t). Wir erhalten somit die n Gleichungen
mj x′′j (t) = −
∑
k 6=j
g mj mk
xj(t) − xk(t)
|xj(t) − xk(t)|3, j = 1, . . . , n . (1.1)
Ist beispielsweise n = 2 und befindet sich K1 immer im Ursprung (x1(t) ≡ 0), so schreibtsich diese Gleichung fur x(t) := x2(t) als
x′′(t) = −g m1x(t)
|x(t)|3 . (1.2)
Gleichung (1.2) beschreibt also die Bewegung eines Massenpunktes um einen fest ruhendenKorper der Masse m1. Sie stellt ein annahernd realistisches Modell etwa fur die Bewegungder Erde um die Sonne dar. Gleichung (1.2) ist eine Differentialgleichung zweiter Ordnung
fur die gesuchte Funktion x(t). Kennt man zu einem Zeitpunkt t0 den Ort x(t0) und die Ge-schwindigkeit x′(t0) des Korpers K2, also zwei Anfangsbedingungen, so ist es physikalischplausibel, dass dann die Bahn des Korpers K2 um den Korper K1 eindeutig festgelegt ist.Wie wir spater sehen werden, ist in der Tat durch (1.2) und die Anfangswerte x(t0), x′(t0)die Funktion x(t) eindeutig bestimmt. Analog sind durch Vorgabe der 2n Anfangsbedin-gungen x1(t0), x
′1(t0), . . . , xn(t0), x
′n(t0) die Funktionen x1(t), . . . , xn(t) durch das System
(1.1) von n Differentialgleichungen zweiter Ordnung eindeutig bestimmt.
Wie sehen nun die Losungskurven von (1.1) bzw. (1.2) aus? Im Falle der Differentialglei-chung (1.2) hat Newton gezeigt, dass x(t) eine Ellipse, eine Hyperbel oder eine Parabelbeschreibt; jede periodische Losung ist also eine Ellipse.2 Er konnte damit die Ergebnissevon Kepler mithilfe der Differentialgleichung (1.2) auf sein fundamentales Kraftgesetz ac-
tio=reactio zuruckfuhren. Um die Differentialgleichung (1.2) zu losen, entwickelte Newtoneigens seinen Calculus, also die Anfange der heutigen Differential– und Integralrechnung.
Abbildung 1.2: Losungsbahn der Differentialgleichung (1.2).
Newton’s Methode unterscheidet sich fundamental von den zuvor benutzten Methoden.Kepler und weitaus fruher auch Pythagoras, haben die Bewegung der Erde um die Son-ne (bzw. der Sonne um die Erde) auf direkte Art und Weise mathematisch beschrieben.Newton hatte die Einsicht, zuerst ein Abhangigkeitsgesetz durch Anwendung einfacherGesetzmaßigkeiten (actio=reactio, Energieerhaltungssatz) zu formulieren, die die zeitliche
Anderung der Bahnkurve beschreibt, also eine Gleichung fur die Anderung eines Zu-standes, die den Zustand selbst beinhaltet, d.h. eine Differentialgleichung. Im Falle desZwei–Korper Problems fuhrt dies, wie wir gesehen haben, auf die Differentialgleichung(1.2). Die Losung dieser Differentialgleichung ergibt dann die gesuchte Bahn.
2Wir werden diese Ergebnisse spater verifizieren.

4 Kapitel 1 Beispiele
Newton’s Methode hat die Physik revolutioniert, und die Beschreibung praktisch aller phy-sikalischer Vorgange auf die Losung entsprechender Differentialgleichungen zuruckgefuhrt(Boltzmann Gleichungen in der Thermodynamik, Schrodinger Gleichung in der Atomphy-sik, etc.). Der Erfolg der Newtonschen Methode steht und fallt jedoch mit der Moglichkeitdie Losungen der jeweils betrachteten Differentialgleichung zu finden, am besten naturlichals geschlossene Ausdrucke. Dies gelingt im Falle des Zwei–Korper Problems (1.2) relativeinfach. Bereits das Drei–Korper Problem (also (1.1) fur n = 3) bereitet aber enormeSchwierigkeiten, und Newton hat vergeblich versucht es zu losen. Tatsachlich ist es selbstunter der vereinfachten Annahme, dass sich die drei Korper nur in einer Ebene bewegen,nicht mehr moglich, die Losungskurven in geschlossener Form anzugeben. Dies wurde 1890von dem franzosischen Mathematiker Henri Poincare erkannt. Poincare entwickelte, gleich-sam als Ersatz, viele neue Ideen, um zumindest das qualitative Verhalten der Losungenvon Differentialgleichungen beschreiben zu konnen. Er wurde damit zum Begrunder derTheorie der dynamischen Systeme, einem der Gegenstande dieser Vorlesung.
Das allgemeine n–Korper Problem ist bis heute ungelost. Es ist nicht bekannt, ob unserSonnensystem
”stabil“ ist. Bereits Poincare hat gewusst, dass die Bewegungen der Pla-
neten in sehr empfindlicher Weise von den Anfangsbedingungen abhangen. Dies machtes praktisch unmoglich, langfristige Vorhersagen uber die Planetenbahnen zu machen. Objedoch prinzipiell nicht vorhersehbares, sogenanntes chaotisches Verhalten vorliegt, ist einoffenes Problem.
1.3 Rauber–Beute–Modell
In den 20er Jahren des 20. Jahrhunderts untersuchte der italienische Biologe UmbertoD’Ancona die Entwicklung der Fischpopulation in der adriatischen See. Er unterschiedzwischen Beute–Fischen und Rauber–Fischen und beobachtete, dass durch die Reduzie-rung des Fischfangs wahrend des ersten Weltkriegs die Rauberpopulation anstieg, dieBeutepopulation aber abnahm. Nachdem er lange Zeit keine Erklarung fur dieses Phano-men finden konnte, wandte er sich schließlich an den Mathematiker Vito Volterra. Volterraentwickelte ein mathematisches Modell, mit dem Ziel, die zeitliche Entwicklung der beidenFischpopulationen moglichst realitatsnah zu beschreiben.
Es sei x(t) die Große der Beutepopulation und y(t) die Große der Rauberpopulation,jeweils zur Zeit t. Da es keinen nennenswerten Nahrungsmangel fur die Beute–Fische gibt,wurde sich die Zahl der Beute–Fische ohne Rauber nach dem Gesetz x′ = ax mit einergewissen positiven Konstanten a entwickeln. Die Anzahl der Aufeinandertreffen zwischenBeute und Rauber ist jedoch proportional zu x(t)y(t), also gilt x′ = ax − bxy mit einerpositiven Konstanten b. Fur die Rauber–Fische gilt, dass ihre Anzahl ohne Nahrung, gemaßdem Gesetz y′ = −cy abnehmen wurde. Mit Beute–Fischen wurden sie aber proportionalzu x(t)y(t) zunehmen. Es gilt somit y′ = −cy + dxy mit positiven Konstanten c, d. Einmogliches mathematisches Modell fur die Entwicklung der Beute– und Rauberpopulationist also durch
x′ = ax − bxy,
y′ = −cy + dxy,(1.3)
gegeben. Wird nun gefischt, so reduziert sich die Anzahl der Rauber– und Beute–Fische

1.3 Rauber–Beute–Modell 5
gleichmaßig proportional zu ihrer Population, d.h. die Abnahme der Zahl der Rauber istεx, die der Beute entsprechend εy mit einer gewissen Konstanten ε > 0, die die Intensitatdes Fischfangs widerspiegelt. Wir erhalten somit folgendes Modell
x′ = (a − ε)x − bxy,
y′ = −(c + ε)y + dxy.(1.4)
Kann dieses Modell erklaren, warum eine Reduzierung des Fischfangs sich wesentlich guns-tiger auf die Rauber–Fische als auf die Beute–Fische auswirkt? Wir beschranken uns imfolgenden auf den Fall ε < a (moderates Fischen: es wird weniger gefischt, als sich dieBeute–Fische vermehren).
Die beiden Gleichungen (1.4) bilden ein System von zwei gekoppelten Differentialgleichun-gen 1. Ordnung, also eine Differentialgleichung 1. Ordnung im R
2. Wir werden spater sehen,dass es zu vorgegebener Anfangsbedingung (x0, y0) ∈ R
2 genau eine Losung t 7→ (x(t), y(t))der Differentialgleichung (1.4) mit (x(0), y(0)) = (x0, y0) gibt. Diese Losung ist fur allet ∈ R definiert. Man kennt jedoch keine expliziten Formeln fur die Losungen t 7→ x(t)und t 7→ y(t). Dennoch kann man sich ein vollstandiges Bild uber diese Losungen machen.Dazu betrachten wir diese Losungen als Kurven t 7→ (x(t), y(t)) im R
2, dem sogenanntenPhasenraum des Systems (1.4). Diese Losungskurven nennt man auch die Trajektorien desSystems (1.4). Wie sehen diese Trajektorien aus?
Zunachst ist x(t) = y(t) ≡ 0 eine konstante Losung. Es gibt eine weitere, interessantekonstante Losung (x(t), y(t)), die man wie folgt finden kann. Konstante Losungen zeichnensich durch x′(t) ≡ 0 und y′(t) ≡ 0 aus. Setzt man dies in die linke Seite von (1.4) ein, soerhalt man (a − ε)x(t) − bx(t)y(t) ≡ 0 und −(c + ε)y(t) + dx(t)y(t) ≡ 0. Hieraus erkenntman, dass x(t) ≡ (c+ ε)/d und y(t) ≡ (a− ε)/b eine zweite konstante Losung des Systems(1.4) ist. Diese Losung beschreibt ein naturliches Gleichgewicht der beiden Populationen.Der Punkt ((c + ε)/d, (a − ε)/b) heißt stationarer Punkt des Systems (1.4). Man erkennt,dass (1.4) keine weiteren konstanten Losungen besitzt.
Um die nicht konstanten Losungen (also die nicht punktformigen Trajektorien) zu finden,schreiben wir (1.4) in der Form
x′
x= (a − ε) − by,
y′
y= −(c + ε) + dx,
woraus man
(−(c + ε) + dx)x′
x− ((a − ε) − by)
y′
y= 0
erhalt. Letztere Gleichung bedeutet
d
dt(−(c + ε) log x + dx − (a − ε) log y + by) = 0.
Setzt man also H(x, y) = −(c+ε) log x+dx− (a−ε) log y+by, so ist die Funktion H(x, y)folglich langs jeder Losungskurve konstant:
H(x(t), y(t)) = const.
In anderen Worten, jede Losungskurve liegt auf einer Niveaumenge der Funktion H(x, y).Man nennt eine solche Funktion ein Erstes Integral des Systems (1.4).

6 Kapitel 1 Beispiele
Lemma 1.2
Die Niveaumengen der Funktion H im ersten Quadranten sind einfach geschlossene Kur-
ven um den Gleichgewichtspunkt ((c + ε)/d, (a − ε)/b).
1 2 3 4
1
2
3
4
Abbildung 1.3: Niveaumengen des Ersten Integrals H.
Der Beweis von Lemma 1.2 wird in Aufgabe 1.7 erbracht. Man kann zeigen, dass dieLosungskurven die Niveaumengen des Ersten Integrals vollstandig und entgegengesetztzum Uhrzeigersinn durchlaufen werden. Alle nicht konstanten Losungen der Differential-gleichung (1.4) sind daher periodisch, d.h. es gibt ein T > 0 mit x(t + T ) = x(t) undy(t + T ) = y(t) fur alle t ∈ R. Um die Langzeitentwicklung zu studieren, betrachten wirjetzt die Mittelwerte
x =1
T
T∫
0
x(t) dt, y =1
T
T∫
0
y(t) dt
einer nicht konstanten (also periodischen) Losung (x(t), y(t)) mit Periode T > 0.
Bemerkenswerterweise lassen sich diese Mittelwerte explizit berechnen, denn
0 =1
T(log x(T ) − log x(0)) =
1
T
T∫
0
x′(t)
x(t)dt =
1
T
T∫
0
[(a − ε) − by(t)] dt,
also
1
T
T∫
0
by(t) dt =1
T
T∫
0
(a − ε) dt = a − ε,
d.h. y = (a − ε)/b. Analog erhalt man x = (c + ε)/d.
In unserem Modell bewirkt eine Reduzierung des Fischfangs also tatsachlich eine Zunahmeder Rauberpopulation, aber eine Abnahme der Beutepopulation bewirkt. Dieses sog. Vol-terra Prinzip gilt auch fur den Einsatz von Insektenvernichtungsmitteln und besagt, dassdie Anwendung von Insektiziden das Wachstum von Schadlingspopulationen fordert, diesonst durch andere Insekten unter Kontrolle gehalten wurden.
1.4 Oszillatoren 7
1.4 Oszillatoren
1.4.1 Das Mathematische Pendel
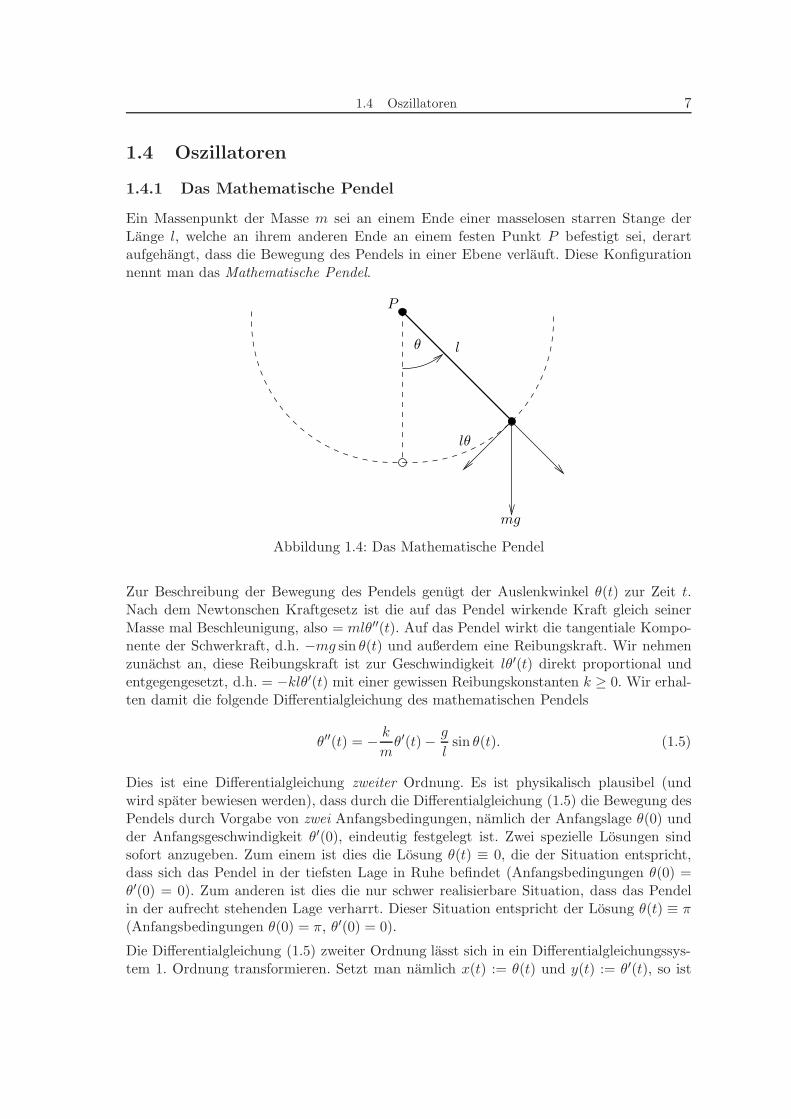
Ein Massenpunkt der Masse m sei an einem Ende einer masselosen starren Stange derLange l, welche an ihrem anderen Ende an einem festen Punkt P befestigt sei, derartaufgehangt, dass die Bewegung des Pendels in einer Ebene verlauft. Diese Konfigurationnennt man das Mathematische Pendel.
P
θ l
lθ
mg
Abbildung 1.4: Das Mathematische Pendel
Zur Beschreibung der Bewegung des Pendels genugt der Auslenkwinkel θ(t) zur Zeit t.Nach dem Newtonschen Kraftgesetz ist die auf das Pendel wirkende Kraft gleich seinerMasse mal Beschleunigung, also = mlθ′′(t). Auf das Pendel wirkt die tangentiale Kompo-nente der Schwerkraft, d.h. −mg sin θ(t) und außerdem eine Reibungskraft. Wir nehmenzunachst an, diese Reibungskraft ist zur Geschwindigkeit lθ′(t) direkt proportional undentgegengesetzt, d.h. = −klθ′(t) mit einer gewissen Reibungskonstanten k ≥ 0. Wir erhal-ten damit die folgende Differentialgleichung des mathematischen Pendels
θ′′(t) = − k
mθ′(t) − g
lsin θ(t). (1.5)
Dies ist eine Differentialgleichung zweiter Ordnung. Es ist physikalisch plausibel (undwird spater bewiesen werden), dass durch die Differentialgleichung (1.5) die Bewegung desPendels durch Vorgabe von zwei Anfangsbedingungen, namlich der Anfangslage θ(0) undder Anfangsgeschwindigkeit θ′(0), eindeutig festgelegt ist. Zwei spezielle Losungen sindsofort anzugeben. Zum einem ist dies die Losung θ(t) ≡ 0, die der Situation entspricht,dass sich das Pendel in der tiefsten Lage in Ruhe befindet (Anfangsbedingungen θ(0) =θ′(0) = 0). Zum anderen ist dies die nur schwer realisierbare Situation, dass das Pendelin der aufrecht stehenden Lage verharrt. Dieser Situation entspricht der Losung θ(t) ≡ π(Anfangsbedingungen θ(0) = π, θ′(0) = 0).
Die Differentialgleichung (1.5) zweiter Ordnung lasst sich in ein Differentialgleichungssys-tem 1. Ordnung transformieren. Setzt man namlich x(t) := θ(t) und y(t) := θ′(t), so ist
8 Kapitel 1 Beispiele
(1.5) aquivalent zux′ = y,
y′ = − k
my − g
lsin x.
(1.6)
Jetzt ist wieder durch die Vorgabe der einen Anfangsbedingung (x0, y0) ∈ R2 die Losung
t 7→ (x(t), y(t)) von (1.6) eindeutig bestimmt.
Wir wollen zunachst kurz auf den Fall des reibungslosen Pendels, also k = 0 in (1.6),eingehen. In diesem Fall schreiben sich die Gleichungen (1.6) in der Form
x′ = y,
y′ = −g
lsin x.
(1.7)
Gibt es fur (1.7) ein Erstes Integral, also eine Funktion H(x, y), die konstant entlang denLosungen ist? Da keine Reibung vorhanden ist, ist nach dem Energieerhaltungssatz dieGesamtenergie
H(x, y) :=1
2m l2 y2 + m g l (1 − cos x)
ein vernunftiger Kandidat fur ein Erstes Integral. In der Tat bestatigt man fur jede Losungt 7→ (x(t), y(t)) von (1.7) sehr einfach, dass
d
dt[H(x(t), y(t))] ≡ 0 .
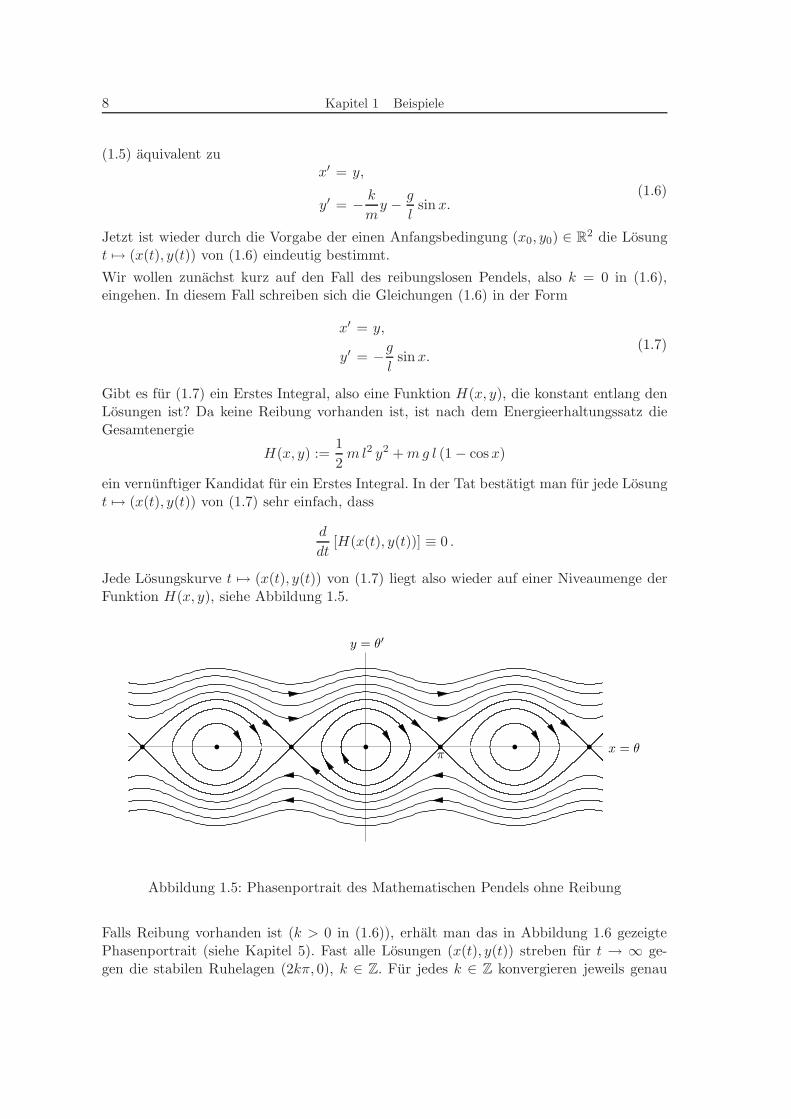
Jede Losungskurve t 7→ (x(t), y(t)) von (1.7) liegt also wieder auf einer Niveaumenge derFunktion H(x, y), siehe Abbildung 1.5.
y = θ′
x = θπ
Abbildung 1.5: Phasenportrait des Mathematischen Pendels ohne Reibung
Falls Reibung vorhanden ist (k > 0 in (1.6)), erhalt man das in Abbildung 1.6 gezeigtePhasenportrait (siehe Kapitel 5). Fast alle Losungen (x(t), y(t)) streben fur t → ∞ ge-gen die stabilen Ruhelagen (2kπ, 0), k ∈ Z. Fur jedes k ∈ Z konvergieren jeweils genau

1.4 Oszillatoren 9
zwei Losungskurven fur t → ∞ gegen die instabile Ruhelage ((2k + 1)π, 0). Insbesonderekonvergiert jede nicht konstante Losung fur t → ∞ gegen eine der Ruhelagen (kπ, 0),k ∈ Z. Damit ist das Langzeitverhalten (t groß) des Mathematischen Pendels mit Reibungvollstandig beschrieben.
y = θ′
x = θπ
Abbildung 1.6: Phasenportrait des Mathematischen Pendels mit Reibung
1.4.2 Der harmonische Oszillator
Wir kehren zur Differentialgleichung des mathematischen Pendels (Gleichung (1.5)) zuruck.Fur kleine Winkel θ(t) legt die Taylorentwicklung der Sinusfunktion mit Entwicklungs-punkt 0,
sin θ(t) = θ(t) +∞∑
j=1
(−1)2j+1 θ(t)2j+1
(2j + 1)!= θ(t) + o(θ(t)) ,
folgende Vorgehensweise nahe. Wir ersetzen die Funktion sin θ(t) in Gleichung (1.5) durchihren linearen Anteil θ(t), d.h. die Differentialgleichung (1.5) durch die einfachere Diffe-rentialgleichung
θ′′(t) = − k
mθ′(t) − g
lθ(t) . (1.8)
Die Differentialgleichung (1.8) entsteht somit durch Linearisierung der Differentialglei-chung (1.5) um die Losung θ(t) = 0. Gleichung (1.8) ist eine lineare Differentialgleichung
2. Ordnung und lasst sich wesentlich leichter untersuchen als die nichtlineare Pendelglei-chung (1.5). Im reibungslosen Fall k = 0 etwa reduziert sich (1.8) auf die Gleichung
θ′′(t) = −g
lθ(t) . (1.9)
Gleichung (1.9), die sogenannte Gleichung des harmonischen Oszillators, stellt ein ideali-siertes mathematisches Modell fur ein Pendel dar. Ihre Losungsgesamtheit lasst sich einfachbestimmen:

10 Kapitel 1 Beispiele
Satz 1.3
Es sei ω ∈ R und x : [a, b] → R eine zweimal differenzierbare Funktion mit
x′′(t) = −ω2x(t) , t ∈ [a, b] .
Dann gibt Konstanten c1, c2 ∈ R mit
x(t) = c1 sin(ωt) + c2 cos(ωt) , t ∈ R .
Beweis. Es sei x : [a, b] → C eine komplexe zweimal differenzierbare Funktion mit x′′ =−ω2x. Wir setzen x1(t) := x′(t) − iωx(t) Dann gilt
x′1(t) = x′′(t) − iωx′(t) = −ω2x(t) − iωx′(t) = −iω(−iωx(t) + x′(t)) = −iωx1(t) .
Satz 1.1 impliziert x1(t) = αeiωt fur ein α ∈ C. Analog findet man x2(t) := x′(t)+iωx(t) =βeiωt fur ein β ∈ C, also
x(t) = ae−iωt + beiωt , a, b ∈ C .
Ist x(t) reellwertig, so folgt x(t) = Rex(t) = c1 sin(ωt)+ c2 cos(ωt) fur gewisse Konstantenc1, c2 ∈ R. �
Bemerkung
Dieser Beweis zeigt, dass es außerordentlich hilfreich ist, Satz 1.1 fur die komplexe Diffe-rentialgleichung x′(t) = ax(t), a ∈ C, zur Verfugung zu haben.
Aus Satz 1.3 lesen wir ab, dass die (reellen) Losungen des harmonischen Oszillators (1.9)Schwingungen mit der Schwingungsdauer
T = 2π
√
l
g
beschreiben. Im idealisierten Pendelmodell (1.9) hangt die Schwingungsdauer also nur vonder Lange des Pendels und dem Ortsfaktor g, aber nicht vom maximalen Auslenkwinkelab.3 Experimente zeigen, dass die Schwingungsdauer ein und desselben Pendels vom Ortdes Experiments abhangt. Dies deutet daraufhin, dass der Ortsfaktor g ortsabhangig undfolglich die Erde keine reine Kugelform haben durfte.
1.4.3 Aperiodische Oszillatoren
In manchen Schwingungsvorgangen ist die Reibung nicht proportional zur Geschwindig-keit. Dies ist z.B. der Fall bei Schwingungen in Rohrengeneratoren wie beispielsweise demVan der Pol–Oszillator
x′′ = ε(1 − x2)x′ − x.
Diese Gleichung transformiert man, indem man y := x′ setzt, in die Form
x′ = y
y′ = ε(1 − x2)y − x .(1.10)
3Die Schwingungsdauer der periodischen Losungen des mathematischen Pendels (1.5) ohne Reibunghangt dagegen vom maximalen Auslenkwinkel ab (siehe Aufgabe 1.8).

1.5 Die Lorenz–Gleichungen 11
Abbildung 1.7: Phasenportrait des Van der Pol–Oszillators fur ε > 0
Fur ε > 0 ergibt sich das Phasenportrait in Abbildung 1.7 (siehe Kapitel 6 fur die Details).Wie man erkennt, ist die Ruhelage (0, 0) instabil und es gibt genau eine weitere periodischeLosung, gegen die alle anderen Losungen fur t → ∞ konvergieren. Die periodische Losungist also ein Attraktor.
Die Gleichungen (1.6), (1.7) und (1.10) sind Prototypen von Systemen von zwei Differential-gleichungen 1. Ordnung, deren Losungen man als Kurven im R
2 interpretieren kann. Fursolche zwei–dimensionalen Systeme liefert die Poincare–Bendixon Theorie (siehe Abschnitt5.5) eine (fast) vollstandige Beschreibung des Langzeitverhaltens ihrer Losungen. Insbeson-dere ergibt sich aus topologischen(!) Grunden, dass in zwei Dimensionen kein
”chaotisches“
Verhalten auftreten kann.
1.5 Die Lorenz–Gleichungen
Der Metereologe und Mathematiker E. N. Lorenz hat 1963 ein System von drei gekoppeltenDifferentialgleichungen als Modell einer konvektiven Stromung aufgestellt, bei der einezweidimensionale Flussigkeitszelle von unten erwarmt und von oben abgekuhlt wird. DiesesSystem weist eine außerordentlich komplizierte Dynamik auf und stellt einen Prototypeines
”chaotischen“ dynamischen Systems dar. Die Lorenz–Gleichungen lauten
x′ = σ(y − x) ,
y′ = rx − y − xz ,
z′ = xy − bz .
Hierbei sind σ, r und b positive Konstanten. Eine typische Losungskurve dieser Differen-tialgleichung (fur σ = 10, b = 8/3 und r = 28) ist in Abbildung 1.8 dargestellt.
12 Kapitel 1 Beispiele
–15–10
–50
510
15 –20–10
010
20
10
20
30
40
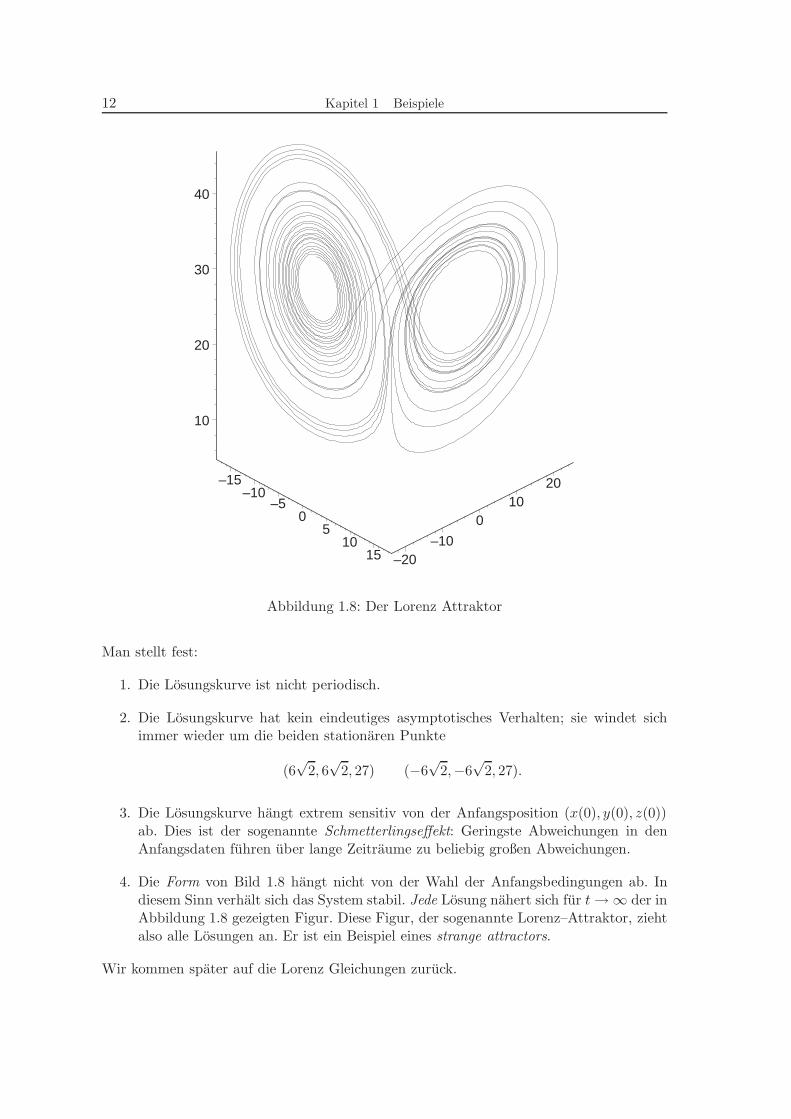
Abbildung 1.8: Der Lorenz Attraktor
Man stellt fest:
1. Die Losungskurve ist nicht periodisch.
2. Die Losungskurve hat kein eindeutiges asymptotisches Verhalten; sie windet sichimmer wieder um die beiden stationaren Punkte
(6√
2, 6√
2, 27) (−6√
2,−6√
2, 27).
3. Die Losungskurve hangt extrem sensitiv von der Anfangsposition (x(0), y(0), z(0))ab. Dies ist der sogenannte Schmetterlingseffekt: Geringste Abweichungen in denAnfangsdaten fuhren uber lange Zeitraume zu beliebig großen Abweichungen.
4. Die Form von Bild 1.8 hangt nicht von der Wahl der Anfangsbedingungen ab. Indiesem Sinn verhalt sich das System stabil. Jede Losung nahert sich fur t → ∞ der inAbbildung 1.8 gezeigten Figur. Diese Figur, der sogenannte Lorenz–Attraktor, ziehtalso alle Losungen an. Er ist ein Beispiel eines strange attractors.
Wir kommen spater auf die Lorenz Gleichungen zuruck.

1.6 Aufgaben 13
1.6 Aufgaben
1.1 (Trennung der Variablen)
Es seien J,D offene Intervalle, g : J → R bzw. h : D → R stetige Funktionen, t0 ∈ Jund x0 ∈ D mit h(x0) 6= 0. Beweisen Sie, dass ein offenes Intervall I ⊆ J mit t0 ∈ Iexistiert, derart, dass es genau eine differenzierbare Funktion x : I → D gibt mitx(t0) = x0 und x′(t) = g(t)h(x(t)) fur alle t ∈ I.
Hinweis: Man gewinne die Funktion x(t) als Losung der Gleichung
x(t)∫
x0
dξ
h(ξ)=
t∫
t0
g(τ) dτ.
1.2 Man bestimme ein moglichst großes offenes Intervall I ⊆ R mit 0 ∈ I und einedifferenzierbare Funktion y : I → R mit
(a) x′(t) = te−x(t) , x(0) = c ∈ R , (b) x′(t) =1
sin(t + x(t))−1 , x(0) =
π
4.
(Hinweis: Fur (a) benutze man Aufgabe 1.1; fur (b) ist Aufgabe 1.1 nicht direkt
anwendbar.)
1.3 (Homogene lineare Differentialgleichungen)
Es sei J ein offenes Intervall, a : J → R stetig und (t0, x0) ∈ J × R. Zeigen Sie, dasses eine eindeutig bestimmte differenzierbare Funktion x : J → R gibt mit
x′(t) = a(t)x(t)
x(t0) = x0
fur alle t ∈ J . Diese ist durch x(t) = exp(∫ t
t0a(τ) dτ)x0 gegeben.
1.4 (Inhomogene lineare Differentialgleichungen, Variation der Konstanten)
Es sei J ein offenes Intervall, a : J → R, b : J → R stetig und (t0, x0) ∈ J×R. ZeigenSie, dass es eine eindeutig bestimmte differenzierbare Funktion x : J → R gibt mit
x′(t) = a(t)x(t) + b(t)
x(t0) = x0
fur alle t ∈ J . Setzt man Φ(t, s) = exp(∫ t
sa(τ) dτ), so ist x(t) durch
x(t) = Φ(t, t0)x0 +
∫ t
t0
Φ(t, s)b(s) ds
gegeben.
1.5 Man bestimme eine differenzierbare Funktion x : (0,∞) → R mit
x′ =1
t
(
−2x + et)
, x(1) = x0 ∈ R.

14 Kapitel 1 Beispiele
1.6 Die Funktion f : R → R sei definiert durch
f(x) = 1 fur x ≤ 1, f(x) = 2 fur x > 1.
Man zeige, dass es auf keinem offenen Intervall I mit 0 ∈ I eine differenzierbareFunktion x : I → R gibt mit x′(t) = f(x(t)) fur alle t ∈ I und x(0) = 1.
1.7 Beweisen Sie Lemma 1.2.
1.8 Bestimmen Sie die Schwingungsdauer der periodischen Losungen des mathemati-schen Pendels (1.5) ohne Reibung.
1.9 (Testen Sie ihr Verstandnis des Beweises von Satz 1.3)
Es sei X := C∞(R; C) der komplexe Vektorraum der beliebig oft differenzierbarenFunktionen f : R → C und D : X → X die durch Df := f ′ gegebene lineareAbbildung.
(a) Bestimmen Sie die Eigenwerte und Eigenvektoren von D : X → X.
(b) Bestimmen Sie alle reellen Losungen der linearisierten Pendelgleichung (1.8) furk 6= 0.
Hinweis: Wir bezeichnen mit I : X → X die identische Abbildung und setzenD2 := D ◦ D. Finden Sie zu gegebenen a, b ∈ C komplexe Zahlen α und β mit
(D − αI) ◦ (D − βI) = D2 + aD + bI .
1.10 (Zwei–Korper Problem I)
Es bezeichne × das aussere Vektorprodukt zweier Vektoren des R3.
(a) Zeigen Sie, dass x(t)×x′(t) entlang jeder Losung x(t) von (1.2) konstant ist undfolgern Sie, dass jede solche Losung x(t) stets in einer Ebene Ex(0) verbleibt.
(b) Fur Polarkoordinaten (r, θ) in Ex(0) zeige man x(t) × x′(t) = r(t)2θ′(t).
(c) Uberzeugen Sie sich davon, dass (b) aquivalent zum zweiten Keplerschen Gesetz
”Der Radiusvektor von der Sonne zu einem Planeten uberstreicht in gleichen
Zeiten gleiche Flachen“ ist.


















