
Dictionary of COMPUTER VISION IMAGE PROCESSING · 2D projection: A transformation map-ping higher...
30
Dictionary of Second Edition Robert B. Fisher Toby P. Breckon Kenneth Dawson-Howe Andrew Fitzgibbon Craig Robertson Emanuele Trucco Christopher K. I. Williams COMPUTER VISION and IMAGE PROCESSING
Transcript of Dictionary of COMPUTER VISION IMAGE PROCESSING · 2D projection: A transformation map-ping higher...
Dictionary of
Second Edition
Robert B. FisherToby P. BreckonKenneth Dawson-HoweAndrew FitzgibbonCraig RobertsonEmanuele TruccoChristopher K. I. Williams
COMPUTER VISION and IMAGE PROCESSING


Dictionary of Computer Visionand Image Processing


Dictionaryof Computer
Vision and ImageProcessing
Second Edition
R. B. FisherUniversity of Edinburgh, UK
T. P. BreckonDurham University, UK
K. Dawson-HoweTrinity College Dublin, Ireland
A. FitzgibbonMicrosoft Research, UK
C. RobertsonEpipole Ltd., UK
E. TruccoUniversity of Dundee, UK
C. K. I. WilliamsUniversity of Edinburgh, UK
This edition first published 2014C© 2014 John Wiley & Sons Ltd
Registered officeJohn Wiley & Sons Ltd, The Atrium, Southern Gate, Chichester, West Sussex, PO19 8SQ, UnitedKingdom
For details of our global editorial offices, for customer services and for information about how toapply for permission to reuse the copyright material in this book please see our website atwww.wiley.com.
The right of the author to be identified as the author of this work has been asserted inaccordance with the Copyright, Designs and Patents Act 1988.
All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, ortransmitted, in any form or by any means, electronic, mechanical, photocopying, recording orotherwise, except as permitted by the UK Copyright, Designs and Patents Act 1988, without theprior permission of the publisher.
Wiley also publishes its books in a variety of electronic formats. Some content that appears inprint may not be available in electronic books.
Designations used by companies to distinguish their products are often claimed as trademarks.All brand names and product names used in this book are trade names, service marks, trademarksor registered trademarks of their respective owners. The publisher is not associated with anyproduct or vendor mentioned in this book.
Limit of Liability/Disclaimer of Warranty: While the publisher and author have used their bestefforts in preparing this book, they make no representations or warranties with respect to theaccuracy or completeness of the contents of this book and specifically disclaim any impliedwarranties of merchantability or fitness for a particular purpose. It is sold on the understandingthat the publisher is not engaged in rendering professional services and neither the publisher northe author shall be liable for damages arising herefrom. If professional advice or other expertassistance is required, the services of a competent professional should be sought.
Library of Congress Cataloging-in-Publication Data
Dictionary of computer vision and image processing / R. B. Fisher, T. P. Breckon,K. Dawson-Howe, A. Fitzgibbon, C. Robertson, E. Trucco, C. K. I. Williams. – 2nd edition.
pages cmIncludes bibliographical references.ISBN 978-1-119-94186-6 (pbk.)
1. Computer vision–Dictionaries. 2. Image processing–Dictionaries. I. Fisher, R. B.TA1634.I45 2014006.3′703–dc23
2013022869
A catalogue record for this book is available from the British Library.
ISBN: 9781119941866
Set in 9/10pt Garamond by Aptara Inc., New Delhi, India
1 2014

From Bob to Rosemary,Mies, Hannah, Phoebeand Lars
From Toby to Alison, myparents and Amy
From Ken to Jane,William and Susie
From AWF to Liz, to myparents, and again to D
From Craig to Karen,Aidan and Caitlin
From Manuel to Emily,Francesca, and Alistair

Contents
Preface Page ix
Numbers 1
A 7
B 25
C 40
D 71
E 86
F 94
G 106
H 119
I 127
J 143
K 144
L 148
M 162
N 185
O 192
P 201
Q 225
R 228
S 245
T 286
U 299
V 303
W 314

X 320
Y 321
Z 322
References 324
viii

Preface
This dictionary arose out of a continu-ing interest in the resources needed bystudents and researchers in the fields ofimage processing, computer vision andmachine vision (however you chooseto define these overlapping fields). Asinstructors and mentors, we often foundconfusion about what various terms andconcepts mean for the beginner. To sup-port these learners, we have tried todefine the key concepts that a compe-tent generalist should know about thesefields.
This second edition adds approxi-mately 1000 new terms to the more than2500 terms in the original dictionary. Wehave chosen new terms that have enteredreasonably common usage (e.g., thosewhich have appeared in the index ofinfluential books) and terms that werenot included originally. We are pleasedto welcome Toby Breckon and ChrisWilliams into the authorial team and tothank Andrew Fitzgibbon and ManuelTrucco for all their help with the firstedition.
One innovation in the second editionis the addition of reference links for amajority of the old and new terms. Unlikemore traditional dictionaries, which pro-vide references to establish the originor meaning of the word, our goal herewas instead to provide further informa-tion about the term.
Another innovation is to include a fewvideos for the electronic version of thedictionary.
This is a dictionary, not an encyclo-pedia, so the definitions are necessarilybrief and are not intended to replace aproper textbook explanation of the term.We have tried to capture the essentials ofthe terms, with short examples or math-ematical precision where feasible or nec-essary for clarity.
Further information about many of theterms can be found in the references.Many of the references are to generaltextbooks, each providing a broad view
of a portion of the field. Some of theconcepts are quite recent; although com-monly used in research publications, theymay not yet have appeared in mainstreamtextbooks. Subsequently, this book is alsoa useful source for recent terminologyand concepts. Some concepts are stillmissing from the dictionary, but we havescanned textbooks and the research liter-ature to find the central and commonlyused terms.
The dictionary was intended for begin-ning and intermediate students andresearchers, but as we developed the dic-tionary it was clear that we also had someconfusions and vague understandings ofthe concepts. It surprised us that someterms had multiple usages. To improvequality and coverage, each definition wasreviewed during development by at leasttwo people besides its author. We hopethat this has caught any errors and vague-ness, as well as providing alternativemeanings. Each of the co-authors is quiteexperienced in the topics covered here,but it was still educational to learn moreabout our field in the process of compil-ing the dictionary. We hope that you findusing the dictionary equally valuable.
To help the reader, terms appearingelsewhere in the dictionary are under-lined in the definitions. We have tried tobe reasonably thorough about this, butsome terms, such as 2D, 3D, light, cam-era, image, pixel, and color were so com-monly used that we decided not to cross-reference all of them.
We have tried to be consistent with themathematical notation: italics for scalars(s), arrowed italics for points and vectors(�v), and bold for matrices (M).
The authors would like to thank Xiang(Lily) Li, Georgios Papadimitriou, and ArisValtazanos for their help with finding cita-tions for the content from the first edi-tion. We also greatly appreciate all thesupport from the John Wiley & Sons edi-torial and production team!

Numbers
1D: One dimensional, usually in ref-erence to some structure. Examplesinclude: a signal x(t) that is a functionof time t; the dimensionality of a sin-gle property value; and one degree offreedom in shape variation or motion.[Hec87:2.1]
1D projection: The projection of datafrom a higher dimension to a singledimensional representation (line).
1-norm: A specific case of the p-norm,the sum of the absolute values of theentries of a given vector �x, ‖�x‖1 =∑n−1
i=0 | �xi |, of length n. Also known asthe taxicab (Manhattan) norm or theL1 norm. [Sho07]
2D: Two dimensional. A space describ-able using any pair of orthogonal basisvectors consisting of two elements.[WP:Two-dimensional_space]
2D coordinate system: A systemuniquely associating two real numbersto any point of a plane. First, twointersecting lines (axes) are chosenon the plane, usually perpendicular toeach other. The point of intersectionis the origin of the system. Second,metric units are established on eachaxis (often the same for both axes) to
x axis
Px
y axis
PyP
associate numbers to points. The coor-dinates Px and Py of a point, P , areobtained by projecting P onto eachaxis in a direction parallel to the otheraxis and reading the numbers at theintersections: [JKS95:1.4]
2D Fourier transform: A special caseof the general Fourier transform oftenused to find structures in images.[FP03:7.3.1]
2D image: A matrix of data represent-ing samples taken at discrete intervals.The data may be from a variety ofsources and sampled in a variety ofways. In computer vision applications,the image values are often encodedcolor or monochrome intensity sam-ples taken by digital cameras but mayalso be range data. Some typical inten-sity values are: [SQ04:4.1.1]
10 09 08 09 20 31
21 16 12 10 09
06 21 11
07 06 01 02 08 42
17 12 09 04
Image values
2D input device: A device for samplinglight intensity from the real world intoa 2D matrix of measurements. Themost popular two-dimensional imag-ing device is the charge-coupled device(CCD) camera. Other common devices
Dictionary of Computer Vision and Image Processing, Second Edition.R. B. Fisher, T. P. Breckon, K. Dawson-Howe, A. Fitzgibbon, C. Robertson, E. Trucco and C. K. I. Williams.C© 2014 John Wiley & Sons, Ltd. Published 2014 by John Wiley & Sons, Ltd.
are flatbed scanners and X-ray scan-ners. [SQ04:4.2.1]
2D point: A point in a 2D space,i.e., characterized by two coordinates;most often, a point on a plane, e.g.,an image point in pixel coordinates.Notice, however, that two coordinatesdo not necessarily imply a plane: apoint on a 3D surface can be expressedeither in 3D coordinates or by twocoordinates given a surface parameter-ization (see surface patch). [JKS95:1.4]
2D point feature: Localized structuresin a 2D image, such as interest points,corners and line meeting points (e.g.,X, Y and T shaped). One detector forthese features is the SUSAN cornerfinder. [TV98:4.1]
2D pose estimation: A special caseof 3D pose estimation. A fundamen-tal open problem in computer visionwhere the correspondence betweentwo sets of 2D points is found. Theproblem is defined as follows: Giventwo sets of points {�xj } and {�yk}, findthe Euclidean transformation {R, �t}(the pose) and the match matrix{M jk} (the correspondences) that bestrelates them. A large number of tech-niques has been used to address thisproblem, e.g., tree-pruning methods,the Hough transform and geometrichashing. [HJL+89]
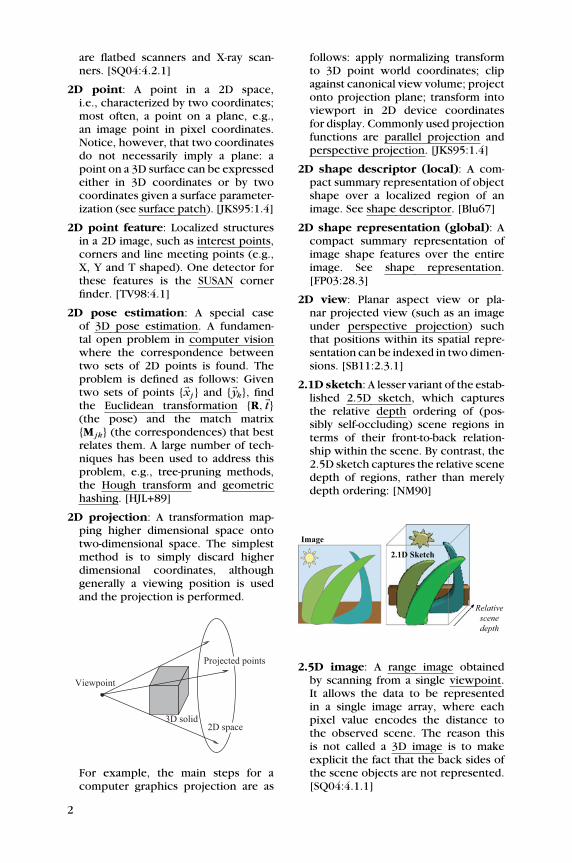
2D projection: A transformation map-ping higher dimensional space ontotwo-dimensional space. The simplestmethod is to simply discard higherdimensional coordinates, althoughgenerally a viewing position is usedand the projection is performed.
3D solid
Viewpoint
Projected points
2D space
For example, the main steps for acomputer graphics projection are as
follows: apply normalizing transformto 3D point world coordinates; clipagainst canonical view volume; projectonto projection plane; transform intoviewport in 2D device coordinatesfor display. Commonly used projectionfunctions are parallel projection andperspective projection. [JKS95:1.4]
2D shape descriptor (local): A com-pact summary representation of objectshape over a localized region of animage. See shape descriptor. [Blu67]
2D shape representation (global): Acompact summary representation ofimage shape features over the entireimage. See shape representation.[FP03:28.3]
2D view: Planar aspect view or pla-nar projected view (such as an imageunder perspective projection) suchthat positions within its spatial repre-sentation can be indexed in two dimen-sions. [SB11:2.3.1]
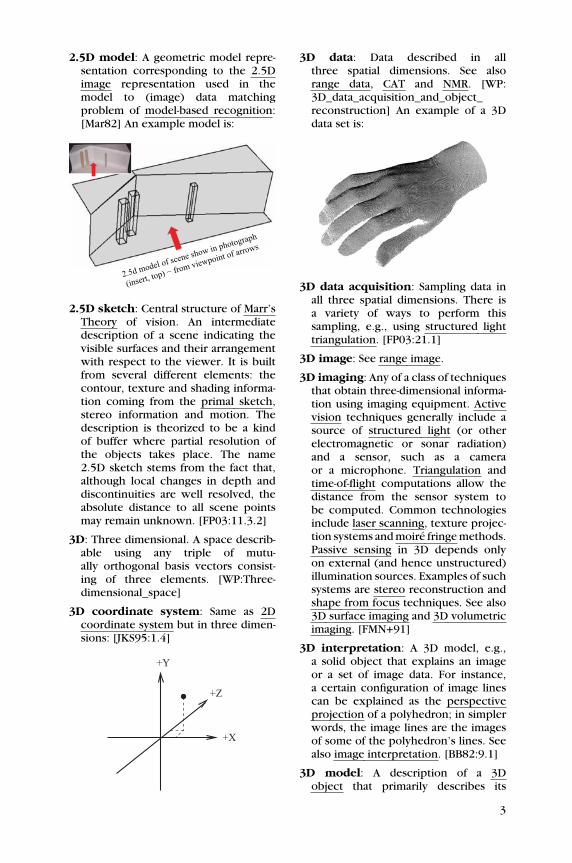
2.1D sketch: A lesser variant of the estab-lished 2.5D sketch, which capturesthe relative depth ordering of (pos-sibly self-occluding) scene regions interms of their front-to-back relation-ship within the scene. By contrast, the2.5D sketch captures the relative scenedepth of regions, rather than merelydepth ordering: [NM90]
Image
2.1D Sketch
Relativescenedepth
2.5D image: A range image obtainedby scanning from a single viewpoint.It allows the data to be representedin a single image array, where eachpixel value encodes the distance tothe observed scene. The reason thisis not called a 3D image is to makeexplicit the fact that the back sides ofthe scene objects are not represented.[SQ04:4.1.1]
2
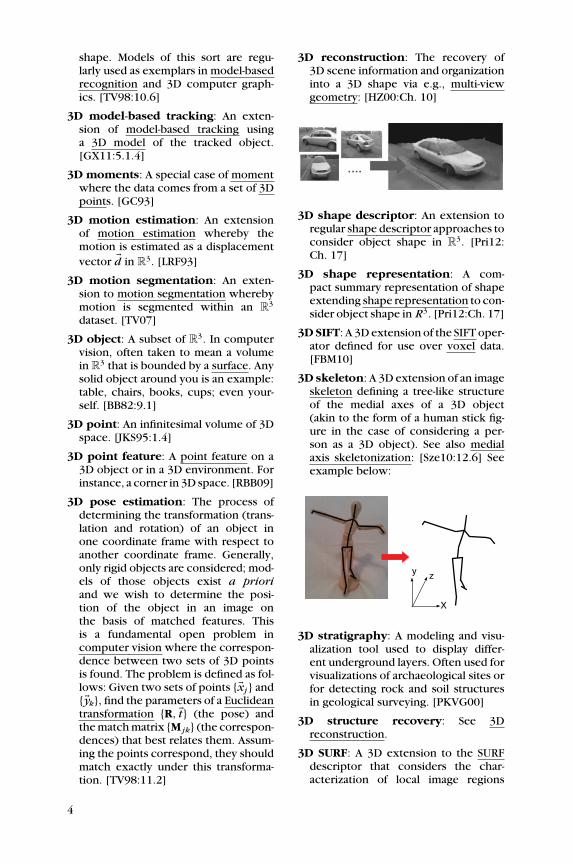
2.5D model: A geometric model repre-sentation corresponding to the 2.5Dimage representation used in themodel to (image) data matchingproblem of model-based recognition:[Mar82] An example model is:
2.5d model of scene show in photograph
(insert, top) − from viewpoint of arrows
2.5D sketch: Central structure of Marr’sTheory of vision. An intermediatedescription of a scene indicating thevisible surfaces and their arrangementwith respect to the viewer. It is builtfrom several different elements: thecontour, texture and shading informa-tion coming from the primal sketch,stereo information and motion. Thedescription is theorized to be a kindof buffer where partial resolution ofthe objects takes place. The name2.5D sketch stems from the fact that,although local changes in depth anddiscontinuities are well resolved, theabsolute distance to all scene pointsmay remain unknown. [FP03:11.3.2]
3D: Three dimensional. A space describ-able using any triple of mutu-ally orthogonal basis vectors consist-ing of three elements. [WP:Three-dimensional_space]
3D coordinate system: Same as 2Dcoordinate system but in three dimen-sions: [JKS95:1.4]
+Z
+Y
+X
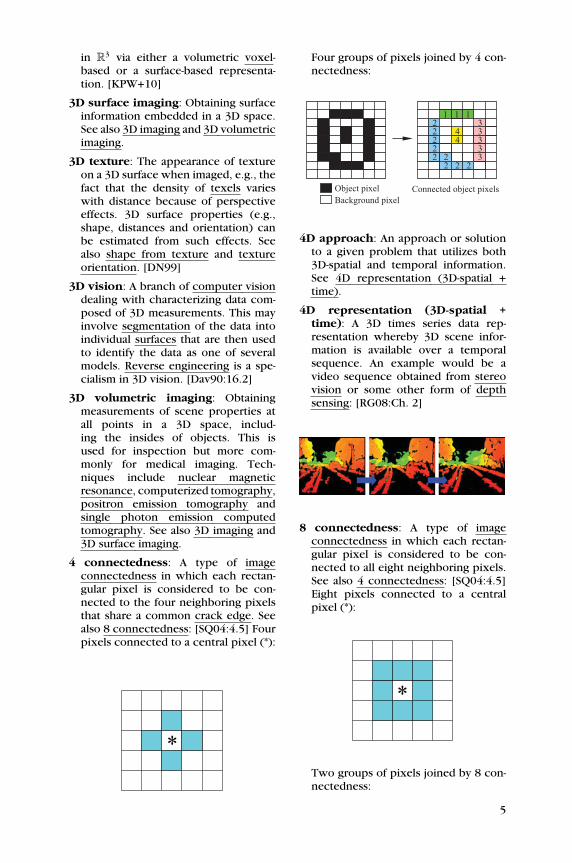
3D data: Data described in allthree spatial dimensions. See alsorange data, CAT and NMR. [WP:3D_data_acquisition_and_object_reconstruction] An example of a 3Ddata set is:
3D data acquisition: Sampling data inall three spatial dimensions. There isa variety of ways to perform thissampling, e.g., using structured lighttriangulation. [FP03:21.1]
3D image: See range image.
3D imaging: Any of a class of techniquesthat obtain three-dimensional informa-tion using imaging equipment. Activevision techniques generally include asource of structured light (or otherelectromagnetic or sonar radiation)and a sensor, such as a cameraor a microphone. Triangulation andtime-of-flight computations allow thedistance from the sensor system tobe computed. Common technologiesinclude laser scanning, texture projec-tion systems and moire fringe methods.Passive sensing in 3D depends onlyon external (and hence unstructured)illumination sources. Examples of suchsystems are stereo reconstruction andshape from focus techniques. See also3D surface imaging and 3D volumetricimaging. [FMN+91]
3D interpretation: A 3D model, e.g.,a solid object that explains an imageor a set of image data. For instance,a certain configuration of image linescan be explained as the perspectiveprojection of a polyhedron; in simplerwords, the image lines are the imagesof some of the polyhedron’s lines. Seealso image interpretation. [BB82:9.1]
3D model: A description of a 3Dobject that primarily describes its
3
shape. Models of this sort are regu-larly used as exemplars in model-basedrecognition and 3D computer graph-ics. [TV98:10.6]
3D model-based tracking: An exten-sion of model-based tracking usinga 3D model of the tracked object.[GX11:5.1.4]
3D moments: A special case of momentwhere the data comes from a set of 3Dpoints. [GC93]
3D motion estimation: An extensionof motion estimation whereby themotion is estimated as a displacementvector �d in R
3. [LRF93]
3D motion segmentation: An exten-sion to motion segmentation wherebymotion is segmented within an R
3
dataset. [TV07]
3D object: A subset of R3. In computer
vision, often taken to mean a volumein R
3 that is bounded by a surface. Anysolid object around you is an example:table, chairs, books, cups; even your-self. [BB82:9.1]
3D point: An infinitesimal volume of 3Dspace. [JKS95:1.4]
3D point feature: A point feature on a3D object or in a 3D environment. Forinstance, a corner in 3D space. [RBB09]
3D pose estimation: The process ofdetermining the transformation (trans-lation and rotation) of an object inone coordinate frame with respect toanother coordinate frame. Generally,only rigid objects are considered; mod-els of those objects exist a prioriand we wish to determine the posi-tion of the object in an image onthe basis of matched features. Thisis a fundamental open problem incomputer vision where the correspon-dence between two sets of 3D pointsis found. The problem is defined as fol-lows: Given two sets of points {�xj } and{�yk}, find the parameters of a Euclideantransformation {R, �t} (the pose) andthe match matrix {M jk} (the correspon-dences) that best relates them. Assum-ing the points correspond, they shouldmatch exactly under this transforma-tion. [TV98:11.2]
3D reconstruction: The recovery of3D scene information and organizationinto a 3D shape via e.g., multi-viewgeometry: [HZ00:Ch. 10]
3D shape descriptor: An extension toregular shape descriptor approaches toconsider object shape in R
3. [Pri12:Ch. 17]
3D shape representation: A com-pact summary representation of shapeextending shape representation to con-sider object shape in R3. [Pri12:Ch. 17]
3D SIFT: A 3D extension of the SIFT oper-ator defined for use over voxel data.[FBM10]
3D skeleton: A 3D extension of an imageskeleton defining a tree-like structureof the medial axes of a 3D object(akin to the form of a human stick fig-ure in the case of considering a per-son as a 3D object). See also medialaxis skeletonization: [Sze10:12.6] Seeexample below:
y z
X
3D stratigraphy: A modeling and visu-alization tool used to display differ-ent underground layers. Often used forvisualizations of archaeological sites orfor detecting rock and soil structuresin geological surveying. [PKVG00]
3D structure recovery: See 3Dreconstruction.
3D SURF: A 3D extension to the SURFdescriptor that considers the char-acterization of local image regions
4
in R3 via either a volumetric voxel-
based or a surface-based representa-tion. [KPW+10]
3D surface imaging: Obtaining surfaceinformation embedded in a 3D space.See also 3D imaging and 3D volumetricimaging.
3D texture: The appearance of textureon a 3D surface when imaged, e.g., thefact that the density of texels varieswith distance because of perspectiveeffects. 3D surface properties (e.g.,shape, distances and orientation) canbe estimated from such effects. Seealso shape from texture and textureorientation. [DN99]
3D vision: A branch of computer visiondealing with characterizing data com-posed of 3D measurements. This mayinvolve segmentation of the data intoindividual surfaces that are then usedto identify the data as one of severalmodels. Reverse engineering is a spe-cialism in 3D vision. [Dav90:16.2]
3D volumetric imaging: Obtainingmeasurements of scene properties atall points in a 3D space, includ-ing the insides of objects. This isused for inspection but more com-monly for medical imaging. Tech-niques include nuclear magneticresonance, computerized tomography,positron emission tomography andsingle photon emission computedtomography. See also 3D imaging and3D surface imaging.
4 connectedness: A type of imageconnectedness in which each rectan-gular pixel is considered to be con-nected to the four neighboring pixelsthat share a common crack edge. Seealso 8 connectedness: [SQ04:4.5] Fourpixels connected to a central pixel (*):
*
Four groups of pixels joined by 4 con-nectedness:
Object pixel
Background pixel
Connected object pixels
3333
2222
22
1 1 1
2
22
3
44
4D approach: An approach or solutionto a given problem that utilizes both3D-spatial and temporal information.See 4D representation (3D-spatial +time).
4D representation (3D-spatial +time): A 3D times series data rep-resentation whereby 3D scene infor-mation is available over a temporalsequence. An example would be avideo sequence obtained from stereovision or some other form of depthsensing: [RG08:Ch. 2]
8 connectedness: A type of imageconnectedness in which each rectan-gular pixel is considered to be con-nected to all eight neighboring pixels.See also 4 connectedness: [SQ04:4.5]Eight pixels connected to a centralpixel (*):
*
Two groups of pixels joined by 8 con-nectedness:
5
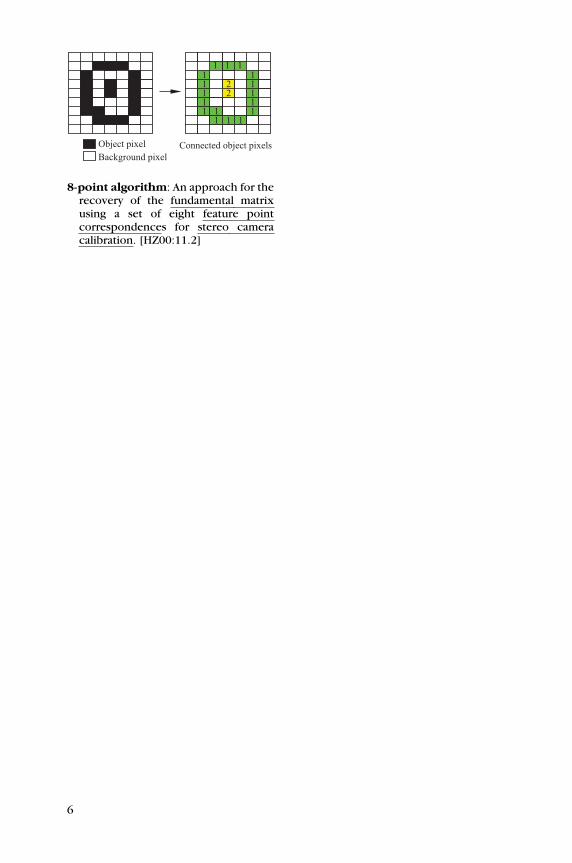
Object pixel
Background pixel
Connected object pixels
11111
1111
11
1 1 1
11
1
22
8-point algorithm: An approach for therecovery of the fundamental matrixusing a set of eight feature pointcorrespondences for stereo cameracalibration. [HZ00:11.2]
6
A
A*: A search technique that performsbest-first searching based on an evalua-tion function that combines the cost sofar and the estimated cost to the goal.[WP:A*_search_algorithm]
a posteriori probability: Literally,“after” probability. It is the proba-bility p(s|e) that some situation sholds after some evidence e has beenobserved. This contrasts with thea priori probability, p(s), the prob-ability of s before any evidence isobserved. Bayes’ rule is often usedto compute the a posteriori proba-bility from the a priori probabilityand the evidence. See also posteriordistribution. [JKS95:15.5]
a priori probability: A probabilitydistribution that encodes an agent’sbeliefs about some uncertain quan-tity before some evidence or data istaken into account. See also priordistribution. [Bis06:1.2.3]
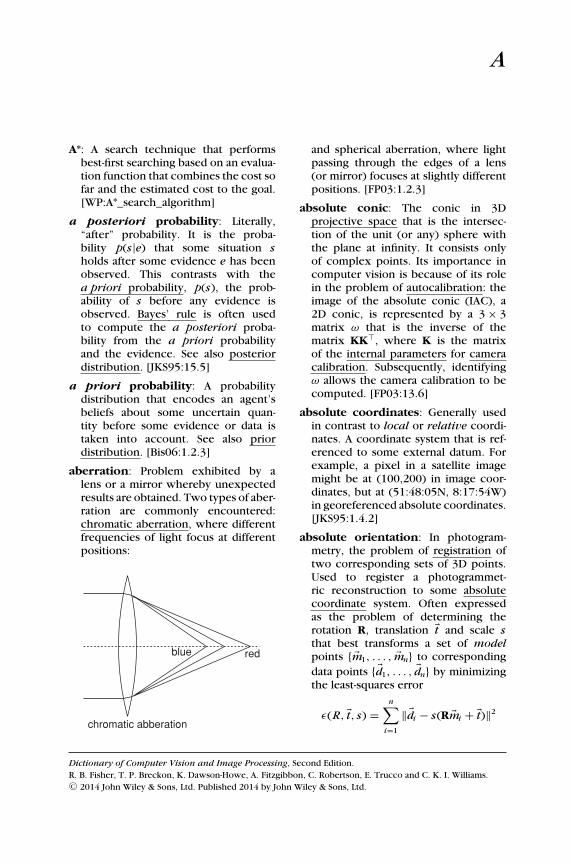
aberration: Problem exhibited by alens or a mirror whereby unexpectedresults are obtained. Two types of aber-ration are commonly encountered:chromatic aberration, where differentfrequencies of light focus at differentpositions:
chromatic abberation
redblue
and spherical aberration, where lightpassing through the edges of a lens(or mirror) focuses at slightly differentpositions. [FP03:1.2.3]
absolute conic: The conic in 3Dprojective space that is the intersec-tion of the unit (or any) sphere withthe plane at infinity. It consists onlyof complex points. Its importance incomputer vision is because of its rolein the problem of autocalibration: theimage of the absolute conic (IAC), a2D conic, is represented by a 3 × 3matrix ω that is the inverse of thematrix KK�, where K is the matrixof the internal parameters for cameracalibration. Subsequently, identifyingω allows the camera calibration to becomputed. [FP03:13.6]
absolute coordinates: Generally usedin contrast to local or relative coordi-nates. A coordinate system that is ref-erenced to some external datum. Forexample, a pixel in a satellite imagemight be at (100,200) in image coor-dinates, but at (51:48:05N, 8:17:54W)in georeferenced absolute coordinates.[JKS95:1.4.2]
absolute orientation: In photogram-metry, the problem of registration oftwo corresponding sets of 3D points.Used to register a photogrammet-ric reconstruction to some absolutecoordinate system. Often expressedas the problem of determining therotation R, translation �t and scale sthat best transforms a set of modelpoints { �m1, . . . , �mn} to correspondingdata points { �d1, . . . , �dn} by minimizingthe least-squares error
ε(R, �t, s) =n∑
i=1
‖ �di − s(R �mi + �t)‖2
Dictionary of Computer Vision and Image Processing, Second Edition.R. B. Fisher, T. P. Breckon, K. Dawson-Howe, A. Fitzgibbon, C. Robertson, E. Trucco and C. K. I. Williams.C© 2014 John Wiley & Sons, Ltd. Published 2014 by John Wiley & Sons, Ltd.
to which a solution may be foundby using singular value decomposition.[JKS95:1.4.2]
absolute point: A 3D point defining theorigin of a coordinate system. [WP:Cartesian_coordinate_system]
absolute quadric: The symmetric 4 × 4
rank 3 matrix � =(
I3 �03
�0�3 0
). Like the
absolute conic, it is defined to be invari-ant under Euclidean transformations, isrescaled under similarities, takes the
form � =(
A�A �03
�0�3 0
)under affine
transforms and becomes an arbitrary4 × 4 rank 3 matrix under projectivetransforms. [FP03:13.6]
absorption: Attenuation of light causedby passing through an optical systemor being incident on an object surface.[Hec87:3.5]
accumulation method: A method ofaccumulating evidence in histogramform, then searching for peaks, whichcorrespond to hypotheses. See alsoHough transform and generalizedHough transform. [Low91:9.3]
accumulative difference: A means ofdetecting motion in image sequences.Each frame in the sequence is com-pared to a reference frame (afterregistration if necessary) to produce adifference image. Thresholding the dif-ference image gives a binary motionmask. A counter for each pixel loca-tion in the accumulative image isincremented every time the differ-ence between the reference imageand the current image exceeds somethreshold. Used for change detection.[JKS95:14.1.1]
accuracy: The error of a value awayfrom the true value. Contrast thiswith precision. [WP:Accuracy_and_precision]
acoustic sonar: Sound Navigation AndRanging. A device that is used primar-ily for the detection and location ofobjects (e.g., underwater or in air, asin mobile robotics, or internal to ahuman body, as in medical ultrasound)by reflecting and intercepting
acoustic waves. It operates withacoustic waves in a way analogous tothat of radar, using both the time offlight and Doppler effects, giving theradial component of relative positionand velocity. [WP:Sonar]
ACRONYM: A vision system developedby Brooks that attempted to recognizethree-dimensional objects from two-dimensional images, using generalizedcylinder primitives to represent bothstored model and objects extractedfrom the image. [Nev82:10.2]
action cuboid: The 3D spatio-temporalspace in which an action detection maybe localized in a video sequence:
Analogous to a window (or region ofinterest) in which an object detectionmay be localized within a 2D image.[GX11:6.4]
action detection: An approach to theautomated detection of a given human,vehicle or animal activity (action) fromimagery. Most commonly carried outas a video analysis task due to the tem-poral nature of actions. [Sze10:12.6.4]
action localization: An approachto in-image or in-scene positionallocalization of a given human, vehicleor animal activity. See also actiondetection. [Sze10:12.6.4]
action model: A pre-defined or learnedmodel of a given human action whichis matched against a given unseenaction instance to perform actionrecognition or action detection. Akinto the use of models in model-basedobject recognition. [NWF08]
action recognition: Similar to actiondetection but further considering the
8
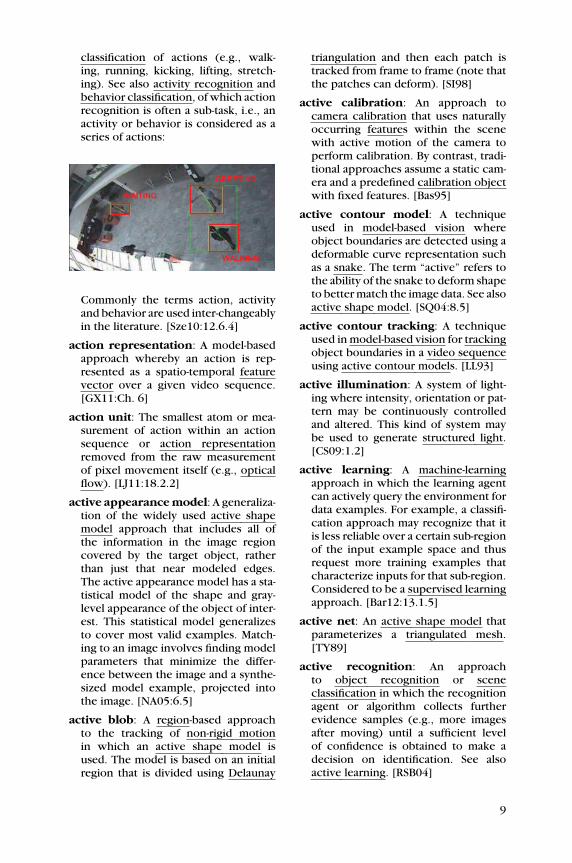
classification of actions (e.g., walk-ing, running, kicking, lifting, stretch-ing). See also activity recognition andbehavior classification, of which actionrecognition is often a sub-task, i.e., anactivity or behavior is considered as aseries of actions:
Commonly the terms action, activityand behavior are used inter-changeablyin the literature. [Sze10:12.6.4]
action representation: A model-basedapproach whereby an action is rep-resented as a spatio-temporal featurevector over a given video sequence.[GX11:Ch. 6]
action unit: The smallest atom or mea-surement of action within an actionsequence or action representationremoved from the raw measurementof pixel movement itself (e.g., opticalflow). [LJ11:18.2.2]
active appearance model: A generaliza-tion of the widely used active shapemodel approach that includes all ofthe information in the image regioncovered by the target object, ratherthan just that near modeled edges.The active appearance model has a sta-tistical model of the shape and gray-level appearance of the object of inter-est. This statistical model generalizesto cover most valid examples. Match-ing to an image involves finding modelparameters that minimize the differ-ence between the image and a synthe-sized model example, projected intothe image. [NA05:6.5]
active blob: A region-based approachto the tracking of non-rigid motionin which an active shape model isused. The model is based on an initialregion that is divided using Delaunay
triangulation and then each patch istracked from frame to frame (note thatthe patches can deform). [SI98]
active calibration: An approach tocamera calibration that uses naturallyoccurring features within the scenewith active motion of the camera toperform calibration. By contrast, tradi-tional approaches assume a static cam-era and a predefined calibration objectwith fixed features. [Bas95]
active contour model: A techniqueused in model-based vision whereobject boundaries are detected using adeformable curve representation suchas a snake. The term “active” refers tothe ability of the snake to deform shapeto better match the image data. See alsoactive shape model. [SQ04:8.5]
active contour tracking: A techniqueused in model-based vision for trackingobject boundaries in a video sequenceusing active contour models. [LL93]
active illumination: A system of light-ing where intensity, orientation or pat-tern may be continuously controlledand altered. This kind of system maybe used to generate structured light.[CS09:1.2]
active learning: A machine-learningapproach in which the learning agentcan actively query the environment fordata examples. For example, a classifi-cation approach may recognize that itis less reliable over a certain sub-regionof the input example space and thusrequest more training examples thatcharacterize inputs for that sub-region.Considered to be a supervised learningapproach. [Bar12:13.1.5]
active net: An active shape model thatparameterizes a triangulated mesh.[TY89]
active recognition: An approachto object recognition or sceneclassification in which the recognitionagent or algorithm collects furtherevidence samples (e.g., more imagesafter moving) until a sufficient levelof confidence is obtained to make adecision on identification. See alsoactive learning. [RSB04]
9
active sensing: 1) A sensing activity car-ried out in an active or purposive way,e.g., where a camera is moved in spaceto acquire multiple or optimal viewsof an object (see also active vision,purposive vision and sensor planning).2) A sensing activity implying the pro-jection of a pattern of energy, e.g., alaser line, onto the scene (see also laserstripe triangulation and structuredlight triangulation). [FP03:21.1]
active shape model: Statistical modelof the shape of an object that candeform to fit a new example of theobject. The shapes are constrained bya statistical shape model so that theymay vary only in ways seen in a train-ing set. The models are usually formedusing principal component analysis toidentify the dominant modes of shapevariation in observed examples of theshape. Model shapes are formed bylinear combinations of the dominantmodes. [WP:Active_shape_model]
active stereo: An alternative approach totraditional binocular stereo. One of thecameras is replaced with a structuredlight projector, which projects lightonto the object of interest. If thecamera calibration is known, thetriangulation for computing the 3Dcoordinates of object points simplyinvolves finding the intersection of aray and known structures in the lightfield. [CS09:1.2]
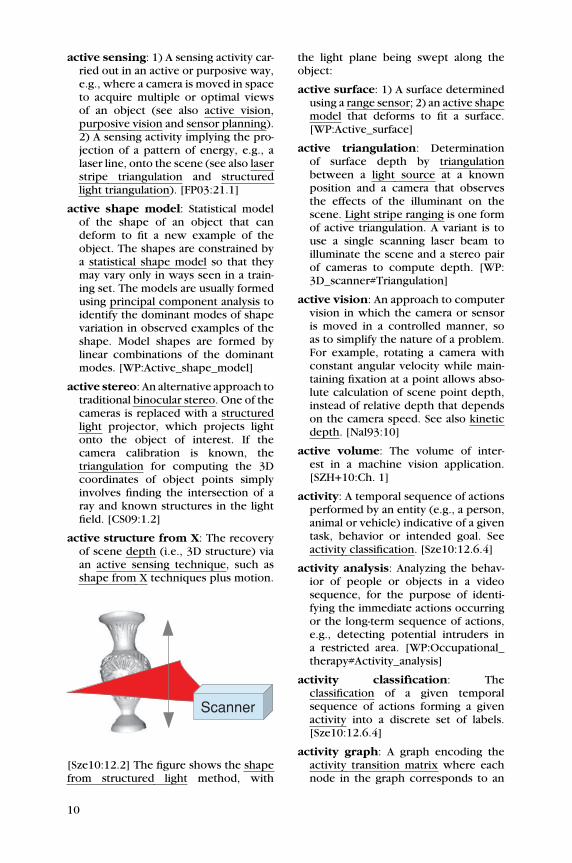
active structure from X: The recoveryof scene depth (i.e., 3D structure) viaan active sensing technique, such asshape from X techniques plus motion.
Scanner
[Sze10:12.2] The figure shows the shapefrom structured light method, with
the light plane being swept along theobject:
active surface: 1) A surface determinedusing a range sensor; 2) an active shapemodel that deforms to fit a surface.[WP:Active_surface]
active triangulation: Determinationof surface depth by triangulationbetween a light source at a knownposition and a camera that observesthe effects of the illuminant on thescene. Light stripe ranging is one formof active triangulation. A variant is touse a single scanning laser beam toilluminate the scene and a stereo pairof cameras to compute depth. [WP:3D_scanner#Triangulation]
active vision: An approach to computervision in which the camera or sensoris moved in a controlled manner, soas to simplify the nature of a problem.For example, rotating a camera withconstant angular velocity while main-taining fixation at a point allows abso-lute calculation of scene point depth,instead of relative depth that dependson the camera speed. See also kineticdepth. [Nal93:10]
active volume: The volume of inter-est in a machine vision application.[SZH+10:Ch. 1]
activity: A temporal sequence of actionsperformed by an entity (e.g., a person,animal or vehicle) indicative of a giventask, behavior or intended goal. Seeactivity classification. [Sze10:12.6.4]
activity analysis: Analyzing the behav-ior of people or objects in a videosequence, for the purpose of identi-fying the immediate actions occurringor the long-term sequence of actions,e.g., detecting potential intruders ina restricted area. [WP:Occupational_therapy#Activity_analysis]
activity classification: Theclassification of a given temporalsequence of actions forming a givenactivity into a discrete set of labels.[Sze10:12.6.4]
activity graph: A graph encoding theactivity transition matrix where eachnode in the graph corresponds to an
10
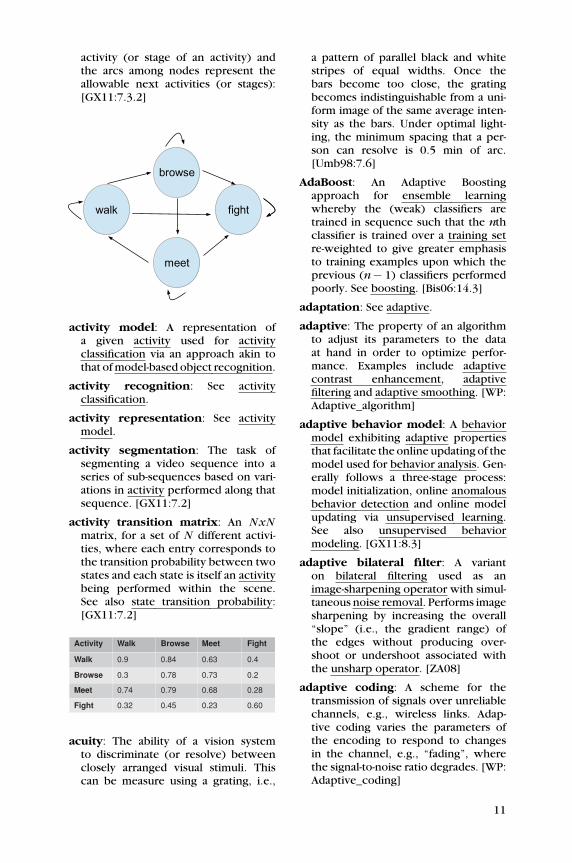
activity (or stage of an activity) andthe arcs among nodes represent theallowable next activities (or stages):[GX11:7.3.2]
activity model: A representation ofa given activity used for activityclassification via an approach akin tothat of model-based object recognition.
activity recognition: See activityclassification.
activity representation: See activitymodel.
activity segmentation: The task ofsegmenting a video sequence into aseries of sub-sequences based on vari-ations in activity performed along thatsequence. [GX11:7.2]
activity transition matrix: An NxNmatrix, for a set of N different activi-ties, where each entry corresponds tothe transition probability between twostates and each state is itself an activitybeing performed within the scene.See also state transition probability:[GX11:7.2]
Activity Walk
0.9
0.3
0.74
0.32
0.84
0.78
0.79
0.45
0.63
0.73
0.68
0.23
0.4
0.2
0.28
0.60
Walk
Browse
Browse
Meet
Meet
Fight
Fight
acuity: The ability of a vision systemto discriminate (or resolve) betweenclosely arranged visual stimuli. Thiscan be measure using a grating, i.e.,
a pattern of parallel black and whitestripes of equal widths. Once thebars become too close, the gratingbecomes indistinguishable from a uni-form image of the same average inten-sity as the bars. Under optimal light-ing, the minimum spacing that a per-son can resolve is 0.5 min of arc.[Umb98:7.6]
AdaBoost: An Adaptive Boostingapproach for ensemble learningwhereby the (weak) classifiers aretrained in sequence such that the nthclassifier is trained over a training setre-weighted to give greater emphasisto training examples upon which theprevious (n − 1) classifiers performedpoorly. See boosting. [Bis06:14.3]
adaptation: See adaptive.
adaptive: The property of an algorithmto adjust its parameters to the dataat hand in order to optimize perfor-mance. Examples include adaptivecontrast enhancement, adaptivefiltering and adaptive smoothing. [WP:Adaptive_algorithm]
adaptive behavior model: A behaviormodel exhibiting adaptive propertiesthat facilitate the online updating of themodel used for behavior analysis. Gen-erally follows a three-stage process:model initialization, online anomalousbehavior detection and online modelupdating via unsupervised learning.See also unsupervised behaviormodeling. [GX11:8.3]
adaptive bilateral filter: A varianton bilateral filtering used as animage-sharpening operator with simul-taneous noise removal. Performs imagesharpening by increasing the overall“slope” (i.e., the gradient range) ofthe edges without producing over-shoot or undershoot associated withthe unsharp operator. [ZA08]
adaptive coding: A scheme for thetransmission of signals over unreliablechannels, e.g., wireless links. Adap-tive coding varies the parameters ofthe encoding to respond to changesin the channel, e.g., “fading”, wherethe signal-to-noise ratio degrades. [WP:Adaptive_coding]
11
adaptive contrast enhancement:An image processing operation thatapplies histogram equalizationlocally across an image. [WP:Adaptive_histogram_equalization]
adaptive edge detection: Edgedetection with adaptive thresholdingof the gradient magnitude image.[Nal93:3.1.2]
adaptive filtering: In signal process-ing, any filtering process in which theparameters of the filter change overtime or where the parameters are dif-ferent at different parts of the signal orimage. [WP:Adaptive_filter]
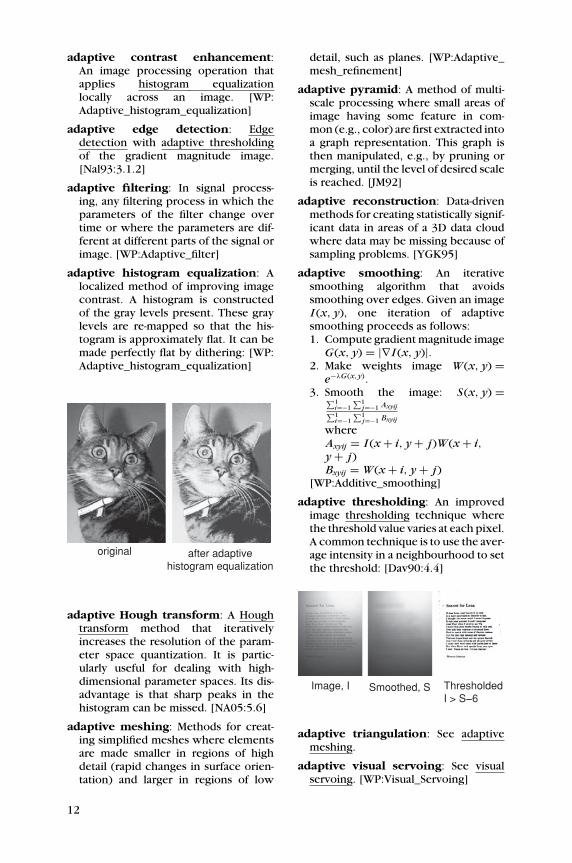
adaptive histogram equalization: Alocalized method of improving imagecontrast. A histogram is constructedof the gray levels present. These graylevels are re-mapped so that the his-togram is approximately flat. It can bemade perfectly flat by dithering: [WP:Adaptive_histogram_equalization]
after adaptivehistogram equalization
original
adaptive Hough transform: A Houghtransform method that iterativelyincreases the resolution of the param-eter space quantization. It is partic-ularly useful for dealing with high-dimensional parameter spaces. Its dis-advantage is that sharp peaks in thehistogram can be missed. [NA05:5.6]
adaptive meshing: Methods for creat-ing simplified meshes where elementsare made smaller in regions of highdetail (rapid changes in surface orien-tation) and larger in regions of low
detail, such as planes. [WP:Adaptive_mesh_refinement]
adaptive pyramid: A method of multi-scale processing where small areas ofimage having some feature in com-mon (e.g., color) are first extracted intoa graph representation. This graph isthen manipulated, e.g., by pruning ormerging, until the level of desired scaleis reached. [JM92]
adaptive reconstruction: Data-drivenmethods for creating statistically signif-icant data in areas of a 3D data cloudwhere data may be missing because ofsampling problems. [YGK95]
adaptive smoothing: An iterativesmoothing algorithm that avoidssmoothing over edges. Given an imageI (x, y), one iteration of adaptivesmoothing proceeds as follows:1. Compute gradient magnitude image
G(x, y) = |∇ I (x, y)|.2. Make weights image W(x, y) =
e−λG(x,y).3. Smooth the image: S(x, y) =∑1
i=−1∑1
j=−1 Axyij∑1i=−1
∑1j=−1 Bxyij
whereAxyij = I (x + i, y + j)W(x + i,y + j)Bxyij = W(x + i, y + j)
[WP:Additive_smoothing]
adaptive thresholding: An improvedimage thresholding technique wherethe threshold value varies at each pixel.A common technique is to use the aver-age intensity in a neighbourhood to setthe threshold: [Dav90:4.4]
ThresholdedI > S−6
Smoothed, SImage, I
adaptive triangulation: See adaptivemeshing.
adaptive visual servoing: See visualservoing. [WP:Visual_Servoing]
12
adaptive weighting: A scheme forweighting elements in a summation,voting or other formulation such thatthe relative influence of each ele-ment is representative (i.e., adapted tosome underlying structure). For exam-ple this may be the similarity of pix-els within a neighborhood (e.g., anadaptive bilateral filter) or a propertychanging over time. See also adaptive.[YK06]
additive color: The way in which mul-tiple wavelengths of light can be com-bined to allow other colors to be per-ceived (e.g., if equal amounts of greenand red light are shone onto a sheetof white paper, the paper will appearto be illuminated with a yellow lightsource (see below). Contrast this withsubtractive color: [Gal90:3.7]
Yel
lowGreen Red
additive noise: Generally, image-independent noise that is added toit by some external process. Therecorded image I at pixel (i, j) is thenthe sum of the true signal S and thenoise N .
Ii, j = Si, j + Ni, j
The noise added at each pixel (i, j)could be different. [Umb98:3.2]
adjacency: See adjacent.
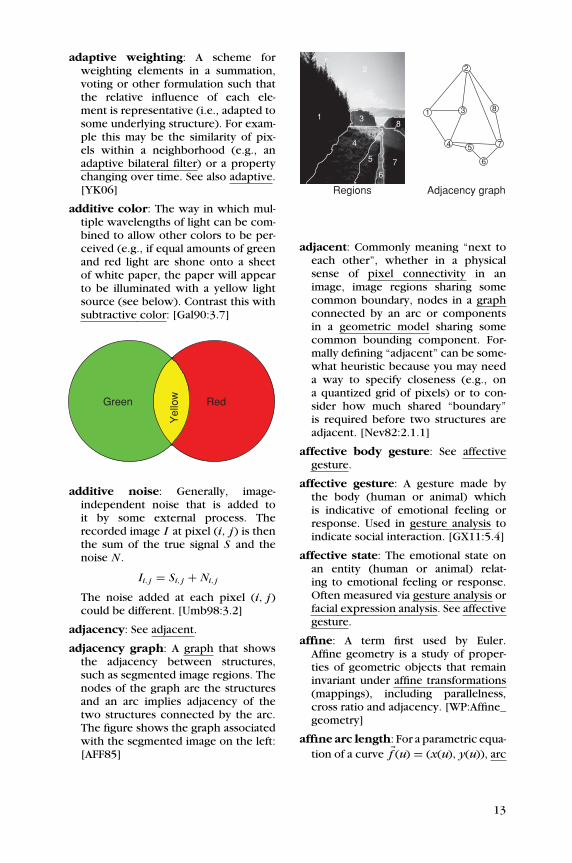
adjacency graph: A graph that showsthe adjacency between structures,such as segmented image regions. Thenodes of the graph are the structuresand an arc implies adjacency of thetwo structures connected by the arc.The figure shows the graph associatedwith the segmented image on the left:[AFF85]
1 3
2
8
7
6
54
1
2
3
4
5
6
7
8
Adjacency graphRegions
adjacent: Commonly meaning “next toeach other”, whether in a physicalsense of pixel connectivity in animage, image regions sharing somecommon boundary, nodes in a graphconnected by an arc or componentsin a geometric model sharing somecommon bounding component. For-mally defining “adjacent” can be some-what heuristic because you may needa way to specify closeness (e.g., ona quantized grid of pixels) or to con-sider how much shared “boundary”is required before two structures areadjacent. [Nev82:2.1.1]
affective body gesture: See affectivegesture.
affective gesture: A gesture made bythe body (human or animal) whichis indicative of emotional feeling orresponse. Used in gesture analysis toindicate social interaction. [GX11:5.4]
affective state: The emotional state onan entity (human or animal) relat-ing to emotional feeling or response.Often measured via gesture analysis orfacial expression analysis. See affectivegesture.
affine: A term first used by Euler.Affine geometry is a study of proper-ties of geometric objects that remaininvariant under affine transformations(mappings), including parallelness,cross ratio and adjacency. [WP:Affine_geometry]
affine arc length: For a parametric equa-tion of a curve �f (u) = (x(u), y(u)), arc
13

length is not preserved under an affinetransformation. The affine length
τ (u) =∫ u
0
(xy − xy)13
is invariant under affine transforma-tions. [SQ04:8.4]
affine camera: A special case of the pro-jective camera that is obtained by con-straining the 3 × 4 camera parametermatrix T such that T3,1 = T3,2 = T3,3 =0 and reducing the camera parametervector from 11 degrees of freedom to8. [FP03:2.3.1]
affine curvature: A measure of curva-ture based on the affine arc length, τ .For a parametric equation of a curve�f (u) = (x(u), y(u)), its affine curva-
ture, μ, is
μ(τ ) = x′′(τ )y′′′(τ ) − x′′′(τ )y′′(τ )
[WP:Affine_curvature]
affine flow: A method of finding themovement of a surface patch byestimating the affine transformationparameters required to transform thepatch from its position in one view toanother. [Cal05]
affine fundamental matrix: Thefundamental matrix which is obtainedfrom a pair of cameras under affineviewing conditions. It is a 3 × 3 matrixwhose upper left 2 × 2 submatrix is allzero. [HZ00:13.2.1]
affine invariant: An object or shapeproperty that is not changed by (i.e.,is invariant under) the application ofan affine transformation. [FP03:18.4.1]
affine length: See affine arc length. [WP:Affine_curvature]
affine moment: Four shape measuresderived from second and third ordermoments that remain invariant underaffine transformations. They are givenby the following equations, whereeach μ is the associated centralmoment: [NA05:7.3]
I1 = μ20μ02 − μ211
μ400
I2 = (μ230μ
203 − 6μ30μ21μ12μ03
+ 4μ30μ312 + 4μ3
21μ03
− 3μ221μ
212)/μ10
00
I3 = (μ20(μ21μ03 − μ212)
− μ11(μ30μ03 − μ21μ12)
+ μ02(μ30μ12 − μ221))/μ7
00
I4 = (μ320μ
203 − 6μ2
20μ11μ12μ03
− 6μ220μ02μ21μ03 + 9μ2
20μ02μ212
+ 12μ20μ211μ21μ03
+ 6μ20μ11μ02μ30μ03
− 18μ20μ11μ02μ21μ12
− 8μ311μ30μ03 − 6μ20μ
202μ30μ12
+ 9μ20μ202μ
221 + 12μ2
11μ02μ30μ12
− 6μ11μ202μ30μ21 + μ3
02μ230)/μ11
00
affine quadrifocal tensor: The formtaken by the quadrifocal tensor whenspecialized to the viewing condi-tions modeled by the affine camera.[HTM99]
affine reconstruction: A three-dimensional reconstruction wherethe ambiguity in the choice of basisis affine only. Planes that are parallelin the Euclidean basis are parallel inthe affine reconstruction. A projectivereconstruction can be upgraded to anaffine reconstruction by identificationof the plane at infinity, often bylocating the absolute conic in thereconstruction. [HZ00:9.4.1]
affine registration: The registrationof two or more images, surfacemeshes or point clouds using an affinetransformation. [JV05]
affine stereo: A method of scene recon-struction using two calibrated views ofa scene from known viewpoints. It isa simple but very robust approxima-tion to the geometry of stereo vision,to estimate positions, shapes and sur-face orientations. It can be calibratedvery easily by observing just four ref-erence points. Any two views of thesame planar surface will be related byan affine transformation that maps oneimage to the other. This consists of atranslation and a tensor, known as thedisparity gradient tensor, representingthe distortion in image shape. If thestandard unit vectors X and Y in one
14
image are the projections of some vec-tors on the object surface and the lin-ear mapping between images is repre-sented by a 2 × 3 matrix A, then thefirst two columns of A will be the cor-responding vectors in the other image.Since the centroid of the plane willmap to both image centroids, it canbe used to find the surface orientation.[Qua93]
affine transformation: A special set oftransformations in Euclidean geometrythat preserve some properties of theconstruct being transformed:� Points remain collinear: if three
points belong to the same straightline, their images under affine trans-formations also belong to the sameline and the middle point remainsbetween the other two points.
� Parallel lines remain parallel andconcurrent lines remain concurrent(images of intersecting lines inter-sect).
� The ratio of lengths of the segmentsof a given line remains constant.
� The ratio of areas of two trianglesremains constant.
� Ellipses remain ellipses; parabolasremain parabolas and hyperbolasremain hyperbolas.
� Barycenters of triangles (and othershapes) map into the correspondingbarycenters.
Analytically, affine transformations arerepresented in the matrix form
f (x) = Ax + b
where the determinant det(A) of thesquare matrix A is not 0. In 2D, thematrix is 2 × 2; in 3D it is 3 × 3.[FP03:2.2]
affine trifocal tensor: The form takenby the trifocal tensor when specializedto the viewing conditions modeled bythe affine camera. [HTM99]
affinely invariant region: Imagepatches that automatically deform withchanging viewpoint in such a way thatthey cover identical physical parts of ascene. Since such regions are describ-able by a set of invariant features theyare relatively easy to match betweenviews under changing illumination.[TG00]
affinity matrix: A matrix capturing thesimilarity of two entities or their rela-tive attraction in a force- or flow-basedmodel. Often referred to in graphcut formulations. See affinity metric.[Sze10:5.4]
affinity metric: A measurement ofthe similarity between two entities(e.g., features, nodes or images). Seesimilarity metric.
affordance and action recognition:An affordance is an opportunity foran entity to take an action. Therecognition of such occurrences thusidentifies such action opportunities.See action recognition. [Gib86]
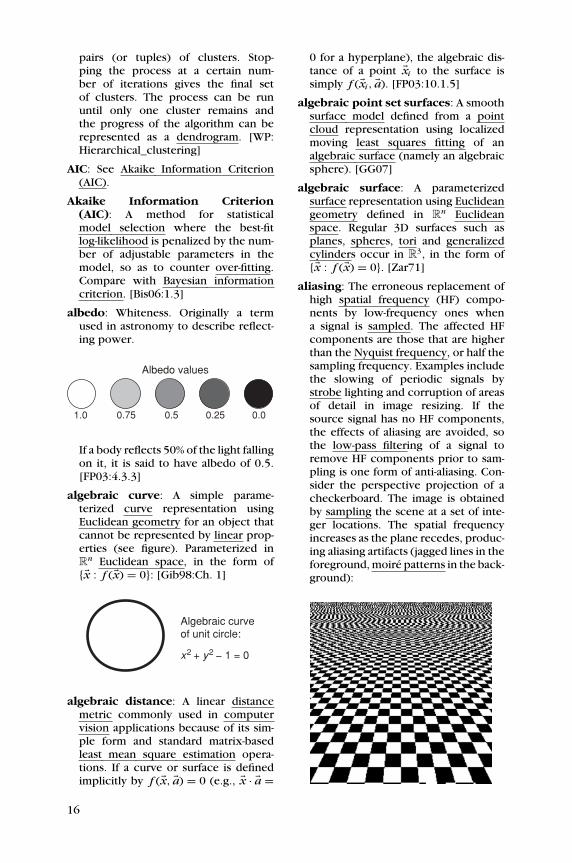
age progression: Refers to work consid-ering the change in visual appearancebecause of the human aging process.Generally considered in tasks such asface recognition, face detection andface modeling. Recent work considersartificial aging of a sample facial imageto produce an aged interpretation ofthe same: [GZSM07]
agglomerative clustering: A class ofiterative clustering algorithms thatbegin with a large number of clus-ters and, at each iteration, merge
15
pairs (or tuples) of clusters. Stop-ping the process at a certain num-ber of iterations gives the final setof clusters. The process can be rununtil only one cluster remains andthe progress of the algorithm can berepresented as a dendrogram. [WP:Hierarchical_clustering]
AIC: See Akaike Information Criterion(AIC).
Akaike Information Criterion(AIC): A method for statisticalmodel selection where the best-fitlog-likelihood is penalized by the num-ber of adjustable parameters in themodel, so as to counter over-fitting.Compare with Bayesian informationcriterion. [Bis06:1.3]
albedo: Whiteness. Originally a termused in astronomy to describe reflect-ing power.
Albedo values
1.0 0.75 0.5 0.25 0.0
If a body reflects 50% of the light fallingon it, it is said to have albedo of 0.5.[FP03:4.3.3]
algebraic curve: A simple parame-terized curve representation usingEuclidean geometry for an object thatcannot be represented by linear prop-erties (see figure). Parameterized inR
n Euclidean space, in the form of{�x : f (�x) = 0}: [Gib98:Ch. 1]
Algebraic curveof unit circle:
x2 + y2 − 1 = 0
algebraic distance: A linear distancemetric commonly used in computervision applications because of its sim-ple form and standard matrix-basedleast mean square estimation opera-tions. If a curve or surface is definedimplicitly by f (�x, �a) = 0 (e.g., �x · �a =
0 for a hyperplane), the algebraic dis-tance of a point �xi to the surface issimply f (�xi, �a). [FP03:10.1.5]
algebraic point set surfaces: A smoothsurface model defined from a pointcloud representation using localizedmoving least squares fitting of analgebraic surface (namely an algebraicsphere). [GG07]
algebraic surface: A parameterizedsurface representation using Euclideangeometry defined in R
n Euclideanspace. Regular 3D surfaces such asplanes, spheres, tori and generalizedcylinders occur in R
3, in the form of{�x : f (�x) = 0}. [Zar71]
aliasing: The erroneous replacement ofhigh spatial frequency (HF) compo-nents by low-frequency ones whena signal is sampled. The affected HFcomponents are those that are higherthan the Nyquist frequency, or half thesampling frequency. Examples includethe slowing of periodic signals bystrobe lighting and corruption of areasof detail in image resizing. If thesource signal has no HF components,the effects of aliasing are avoided, sothe low-pass filtering of a signal toremove HF components prior to sam-pling is one form of anti-aliasing. Con-sider the perspective projection of acheckerboard. The image is obtainedby sampling the scene at a set of inte-ger locations. The spatial frequencyincreases as the plane recedes, produc-ing aliasing artifacts (jagged lines in theforeground, moire patterns in the back-ground):
16
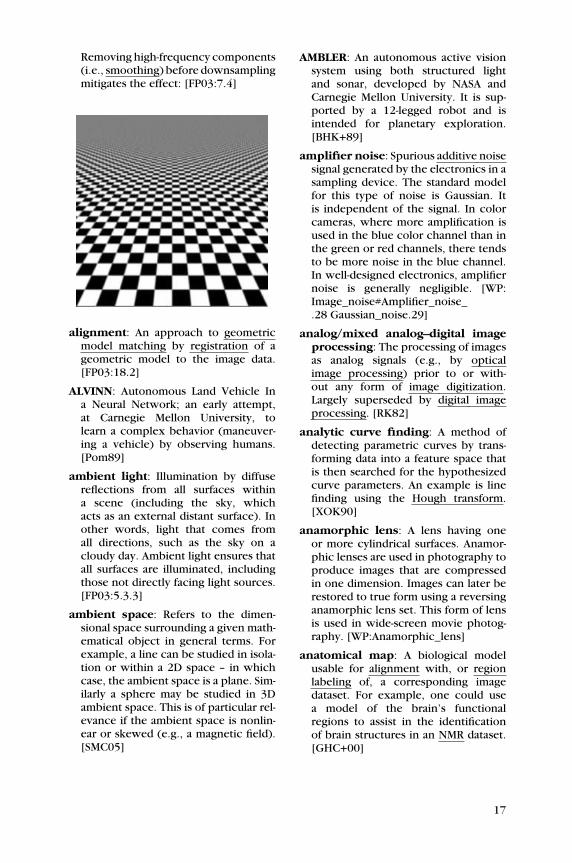
Removing high-frequency components(i.e., smoothing) before downsamplingmitigates the effect: [FP03:7.4]
alignment: An approach to geometricmodel matching by registration of ageometric model to the image data.[FP03:18.2]
ALVINN: Autonomous Land Vehicle Ina Neural Network; an early attempt,at Carnegie Mellon University, tolearn a complex behavior (maneuver-ing a vehicle) by observing humans.[Pom89]
ambient light: Illumination by diffusereflections from all surfaces withina scene (including the sky, whichacts as an external distant surface). Inother words, light that comes fromall directions, such as the sky on acloudy day. Ambient light ensures thatall surfaces are illuminated, includingthose not directly facing light sources.[FP03:5.3.3]
ambient space: Refers to the dimen-sional space surrounding a given math-ematical object in general terms. Forexample, a line can be studied in isola-tion or within a 2D space – in whichcase, the ambient space is a plane. Sim-ilarly a sphere may be studied in 3Dambient space. This is of particular rel-evance if the ambient space is nonlin-ear or skewed (e.g., a magnetic field).[SMC05]
AMBLER: An autonomous active visionsystem using both structured lightand sonar, developed by NASA andCarnegie Mellon University. It is sup-ported by a 12-legged robot and isintended for planetary exploration.[BHK+89]
amplifier noise: Spurious additive noisesignal generated by the electronics in asampling device. The standard modelfor this type of noise is Gaussian. Itis independent of the signal. In colorcameras, where more amplification isused in the blue color channel than inthe green or red channels, there tendsto be more noise in the blue channel.In well-designed electronics, amplifiernoise is generally negligible. [WP:Image_noise#Amplifier_noise_.28 Gaussian_noise.29]
analog/mixed analog–digital imageprocessing: The processing of imagesas analog signals (e.g., by opticalimage processing) prior to or with-out any form of image digitization.Largely superseded by digital imageprocessing. [RK82]
analytic curve finding: A method ofdetecting parametric curves by trans-forming data into a feature space thatis then searched for the hypothesizedcurve parameters. An example is linefinding using the Hough transform.[XOK90]
anamorphic lens: A lens having oneor more cylindrical surfaces. Anamor-phic lenses are used in photography toproduce images that are compressedin one dimension. Images can later berestored to true form using a reversinganamorphic lens set. This form of lensis used in wide-screen movie photog-raphy. [WP:Anamorphic_lens]
anatomical map: A biological modelusable for alignment with, or regionlabeling of, a corresponding imagedataset. For example, one could usea model of the brain’s functionalregions to assist in the identificationof brain structures in an NMR dataset.[GHC+00]
17
AND operator: A Boolean logic oper-ator that combines two input binaryimages:
p q p&q
0 0 00 1 01 0 01 1 1
This approach is used to select imageregions by applying the AND logic ateach pair of corresponding pixels. Therightmost image below is the resultof ANDing the two leftmost images:[SB11:3.2.2]
angiography: A method for imagingblood vessels by introducing a dye thatis opaque when photographed by X-ray. Also the study of images obtainedin this way. [WP:Angiography]
angularity ratio: Given two figures, Xand Y, αi(X) and β j (Y) are angles sub-tending convex parts of the contour ofthe figure X and γk(X) are angles sub-tending plane parts of the contour offigure X; the angularity ratios are:∑
i
αi(X)
360◦
and ∑i β j (X)∑k γk(X)
[Lee64]
anisotropic diffusion: An edge-preserving smoothing filter commonlyused for noise removal. Also calledPerona-Malik diffusion. See alsobilateral filtering. [Sze10:3.3]
anisotropic filtering: Any filtering tech-nique where the filter parameters vary
over the image or signal being filtered.[WP:Anisotropic_filtering]
anisotropic structure tensor: A matrixrepresenting non-uniform, second-order (i.e., gradient/edge) informationof an image or function neighborhood.Commonly used in corner detectionand anisotropic filtering approaches.[Sze10:3.3]
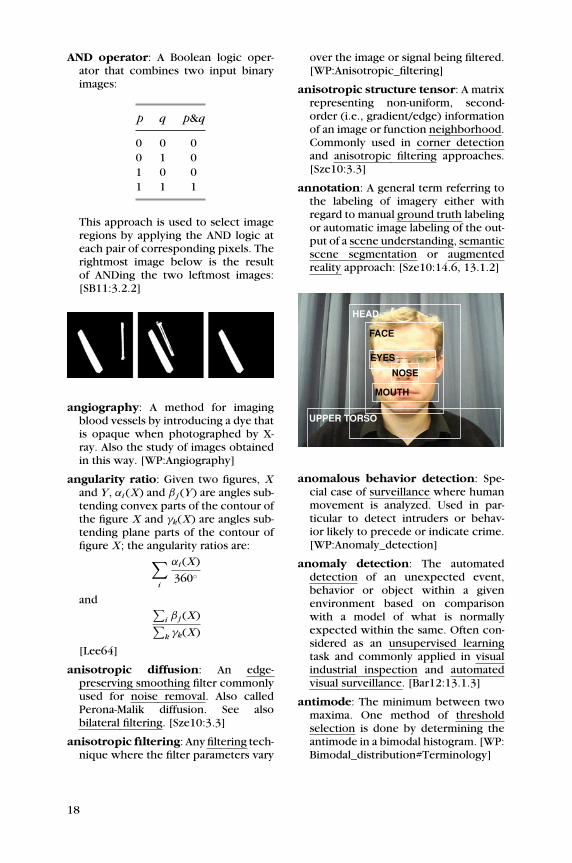
annotation: A general term referring tothe labeling of imagery either withregard to manual ground truth labelingor automatic image labeling of the out-put of a scene understanding, semanticscene segmentation or augmentedreality approach: [Sze10:14.6, 13.1.2]
FACE
EYES
NOSE
MOUTH
UPPER TORSO
HEAD
anomalous behavior detection: Spe-cial case of surveillance where humanmovement is analyzed. Used in par-ticular to detect intruders or behav-ior likely to precede or indicate crime.[WP:Anomaly_detection]
anomaly detection: The automateddetection of an unexpected event,behavior or object within a givenenvironment based on comparisonwith a model of what is normallyexpected within the same. Often con-sidered as an unsupervised learningtask and commonly applied in visualindustrial inspection and automatedvisual surveillance. [Bar12:13.1.3]
antimode: The minimum between twomaxima. One method of thresholdselection is done by determining theantimode in a bimodal histogram. [WP:Bimodal_distribution#Terminology]
18


















