
DG-FEM for Time-Dependent Problems Lecture 1: The Basics
65
DG-FEM for Time-Dependent Problems Lecture 1: The Basics Jan S. Hesthaven [email protected] www.cfm.brown.edu/people/jansh/ Division of Applied Mathematics Brown University, Box F Providence, RI 02912, USA Ecole de Ondes, INRIA 2006 – p.1
-
Upload
doannguyet -
Category
Documents
-
view
222 -
download
0
Transcript of DG-FEM for Time-Dependent Problems Lecture 1: The Basics
DG-FEM for Time-Dependent ProblemsLecture 1: The Basics
Jan S. Hesthaven
www.cfm.brown.edu/people/jansh/
Division of Applied Mathematics
Brown University, Box F
Providence, RI 02912, USA
Ecole de Ondes, INRIA 2006 – p.1
Let Me Start by Saying Thank you!
To the organizersGary CohenPatrick Joly
To the people payingINRIA, CEA, EDFNSF, DARPA, Sloan Foundation
To collaboratorsTim WarburtonLucas Wilcox, Gustaav Jacobs, David Gottlieb. . . and many others !
. . . and to you all for coming !
Ecole de Ondes, INRIA 2006 – p.2
Focus of My Lectures
Time-depedent wave equations
Mostly linear problems but also some nonlinear problems
We shall discuss mainly DG-FEM but also some generalissues of finite volume methods for conservation laws
I shall strive to blend theory and applications with proofsbeing sketchy at best
Caution with the notes
. . . and the codes
Ecole de Ondes, INRIA 2006 – p.3
The Grand Picture
Lecture 1: The Basics
The why’s, how’s, and what’s
Lecture 2: Insight through theory and some practicalities
A deeper look behind the scenes and some basicimplementation details
Lecture 3: Extensions to 2D/3D
Extending it all to 2D/3D, Maxwell’s equations andsome problems
Lecture 4: Problems with variable coefficients andnonlinear terms
What happens – and how do we control it ?
Ecole de Ondes, INRIA 2006 – p.4
Overview of Lecture 1
Why do we need something else ?Pros’ and Con’s of existing methodsWishlistWhy is high-order important ?
The first schemeCentral elementsRole of numerical flux’Experimental’ evidence
GeneralizationsSystems and multiple dimensionsFluxes for linear systems
Ecole de Ondes, INRIA 2006 – p.5
Lets get started with the basics
We begin by considering
∂u
∂t+∂f
∂x= g , x ∈ Ω ,
subject to B.C and I.C.
We must make two choices when defining the scheme
How to represent u ≃ uh
How should uh satisfy PDE ?
The choices will separate the schemes – many of which weknow
Ecole de Ondes, INRIA 2006 – p.6
Finite Difference Methods I
Lay down a grid, xk
Assume that the local solution is an interpolatingpolynomial, i.e.
x ∈ [xk−1, xk+1] : uh(x, t) =2∑
i=0
ai(t)xi , fh(x, t) =
2∑
i=0
bi(t)xi ,
Form the local residual
x ∈ [xk−1, xk+1] : Rh(x, t) =∂uh
∂t+∂fh
∂x− g(x, t) .
Require that it vanishes at grid point, xk,
duh(xk, t)
dt+fh(xk+1, t) − fh(xk−1, t)
2h= g(xk, t) ,
Ecole de Ondes, INRIA 2006 – p.7
Finite Difference Methods II
Positive qualitiesVery simple and straightforwardSolid theoretical understandingExplicit in timeA wider stencil gives improved accuracy
Negative qualitiesIt is inherently one-dimensional.2D/3D require tensor-products, i.e., no geometricflexibility and/or local resolution.Stable high-order in finite domains is ’tricky’
Ecole de Ondes, INRIA 2006 – p.8
Observations
The inflexibility of FD methods highlights that we shouldseek a multi-element formulation, i.e.
Ω ≃ Ωh =K⋃
k=1
Dk ,
Dk are often simplices or cubes – but need not be
Dk are often nonoverlapping – but not always
Ecole de Ondes, INRIA 2006 – p.9
Finite Volume Methods I
We begin by assuming that the solution is representedlocally by uh and require
∫
Dk
(
∂uh
∂t+∂fh
∂x− g
)
ψl(x) dx = 0 ,
where ψl(x) is a local test function.If we choose the local test function to be a constant we have
hkuk + fk+1/2 − fk−1/2 = hkgk ,
where
hkuk =
∫
Dk
udx , hkgk =
∫
Dk
gdx ,
fx±1/2 = fh(uh(xk±1/2)) .
Ecole de Ondes, INRIA 2006 – p.10
Finite Volume Methods II
A local, cell wise, method for advancing in time – except
We do not know fx±1/2 !
The FV method is based on reconstruction – we introduce anumerical flux
f(xk+1/2) = f∗(uk, uk+1) ,
for instance
f(xk+1/2) = f
(
uk + uk+1
2
)
, f(xk+1/2) =f(uk) + f(uk+1)
2,
and many other options.
Note that for the linear case, it becomes a FD method.
Ecole de Ondes, INRIA 2006 – p.11
Finite Volume Methods III
Positive qualitiesVery simple and straightforwardElement based gives geometric flexibilitySolid theoretical understanding, incl for nonlinearproblems (more on that later).Explicit in time
Negative qualitiesHigh-order requires larger stencils – complex ongeneral gridsStable high-order in finite domains is ’tricky’Conservation law based, i.e., less natural for ellipticproblems
Ecole de Ondes, INRIA 2006 – p.12
Finite Element Methods I
The idea of elements is good – but we need something morelocalized.
Consider the local representation
uh(x) = uix− xk+1
xk − xk+1+ uk+1
x− xk
xk+1 − xk=
1∑
j=0
uk+jlkj (x) ,
based on the two vertex solutions, ui and ui+1.
Including all elements, this yields a global solution
uh(x) =K∑
k=1
ukNk(x) , Ni(xj) = δij .
Ecole de Ondes, INRIA 2006 – p.13
Finite Element Methods II
Consider now again
∫
Ω
(
∂uh
∂t+∂fh
∂x− gh
)
ψl(x) dx = 0 .
Taking the test function to be the shape function yields
Mduh
dt+ Sfh = Mgh ,
where
Mij =
∫
ΩNi(x)Nj(x) dx , Sij =
∫
Ω
dNi
dxNj(x) dx ,
Ecole de Ondes, INRIA 2006 – p.14
Finite Element Methods III
Positive qualitiesElement based gives geometric flexibility, localrefinementSolid theoretical understandingGood support for high-order local approximations
Negative qualitiesBorn out of elliptic problems – wave problems ’tricky’due to lack of direction.Conservation laws needs ’tricks’Implicit in time
Ecole de Ondes, INRIA 2006 – p.15
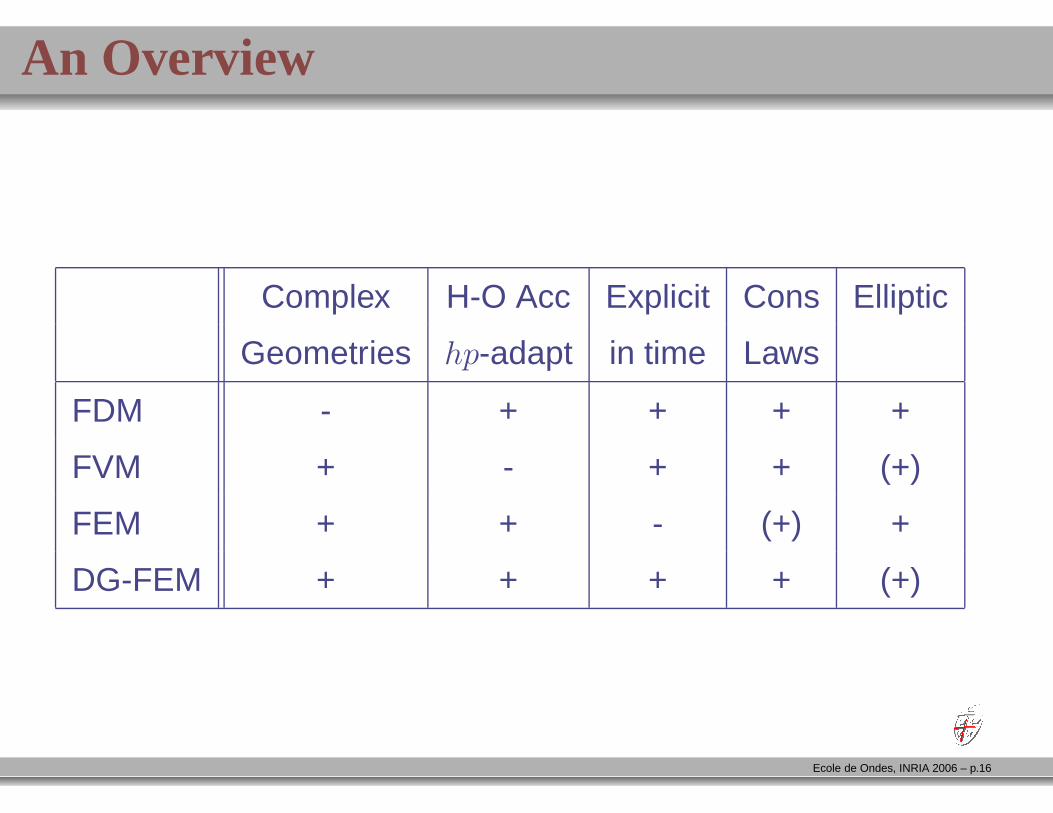
An Overview
Complex H-O Acc Explicit Cons Elliptic
Geometries hp-adapt in time Laws
FDM - + + + +
FVM + - + + (+)
FEM + + - (+) +
DG-FEM + + + + (+)
Ecole de Ondes, INRIA 2006 – p.16
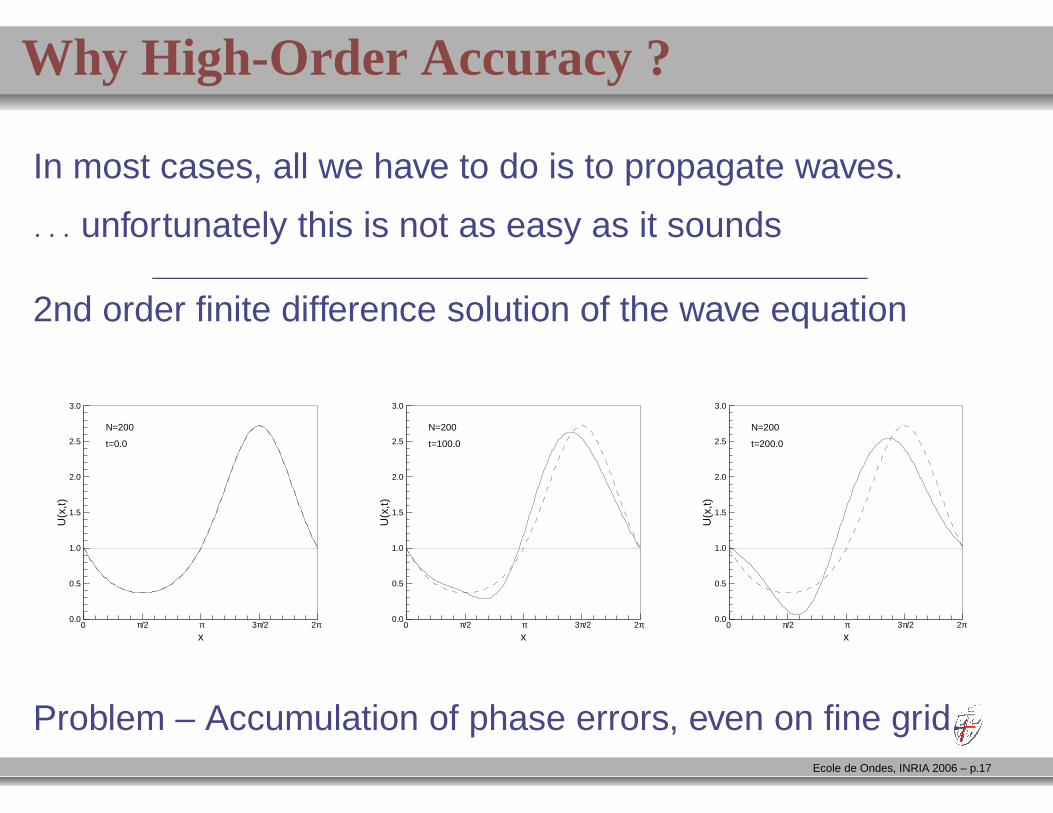
Why High-Order Accuracy ?
In most cases, all we have to do is to propagate waves.
. . . unfortunately this is not as easy as it sounds
2nd order finite difference solution of the wave equation
x
0.0
0.5
1.0
1.5
2.0
2.5
3.0
U(x
,t)
0 π/2 π 3π/2 2π
N=200
t=0.0
x
0.0
0.5
1.0
1.5
2.0
2.5
3.0
U(x
,t)
0 π/2 π 3π/2 2π
N=200
t=100.0
x
0.0
0.5
1.0
1.5
2.0
2.5
3.0
U(x
,t)
0 π/2 π 3π/2 2π
N=200
t=200.0
Problem – Accumulation of phase errors, even on fine grid.Ecole de Ondes, INRIA 2006 – p.17
. . . high-order cont’
The only practical way to address this is by using a
Higher-order scheme – Truncation error exceeds 2.
On easily shows that the phase error behaves as
em(p, ν) ∝ νp−2m ⇒ p(ν, εp) ∝ 2m
√
ν
εp,
p – points per wavelength
ν – number of periods
2m – order of scheme
εp – acceptable error
Ecole de Ondes, INRIA 2006 – p.18
. . . high-order cont’
Solving wave problems in d-dimensions to time t withaccuracy εp this translates into
Memory ∝
(
ν
εp
)d
2m
, Work ∝ (2m)dν
(
ν
εp
)d+1
2m
.
So 2m > 2 advantageous in cases where
εp ≪ 1, i.e., when high accuracy is required.
ν ≫ 1, i.e., when long time integration is needed.
d > 1, i.e., for multi-dimensional problems.
pm < 10, i.e., efficient discretizations of large problems.
Ecole de Ondes, INRIA 2006 – p.19
A Wishlist for a ’New’ Scheme
Support for high-order/non-uniform grids
Geometric flexibility
Suitable for both conservation laws and ’global’ problems
Explicit in time
Strong analysis basis
. . . and if we are greedy
Robustness to variations in equations
High computational efficiency
Ecole de Ondes, INRIA 2006 – p.20
DG-FEM I
From the previous discussion, it seems clear that
We need geometric flexibility and hp-supportThis is achieved by an element based approach (FE,FV)
Support for local high-order (FE)This is achieved by the local representation of uh
Prefer explicit in time (FV)This is achieved by the local statement of how uh
satisfies PDE
Ecole de Ondes, INRIA 2006 – p.21
DG-FEM II
Hence, we assume a local polynomial form (1st order here)
x ∈ [xk, xk+1] : ukh(x) = uk
x− xk+1
xk − xk+1+uk+1
x− xk
xk+1 − xk=
1∑
i=0
uk+ilki (x)
form the residual
x ∈ [xk, xk+1] : Rh(x, t) =∂uh
∂t+∂fh
∂x− g(x, t) ,
and make the local statement∫ xk+1
xk
Rh(x, t)lkj (x) dx = 0 .
Ecole de Ondes, INRIA 2006 – p.22
DG-FEM III
Problems
The K local solutions are not connected
At shared points xk, there are two local statements
Let us draw inspiration from the FV method to obtain
∫ xk+1
xk
∂uh
∂tlkj − fh
dlkj
dx− g(x, t)lkj dx = −
[
fhlkj
]xk+1
xk
.
Question now is – what does RHS mean ?
Ecole de Ondes, INRIA 2006 – p.23
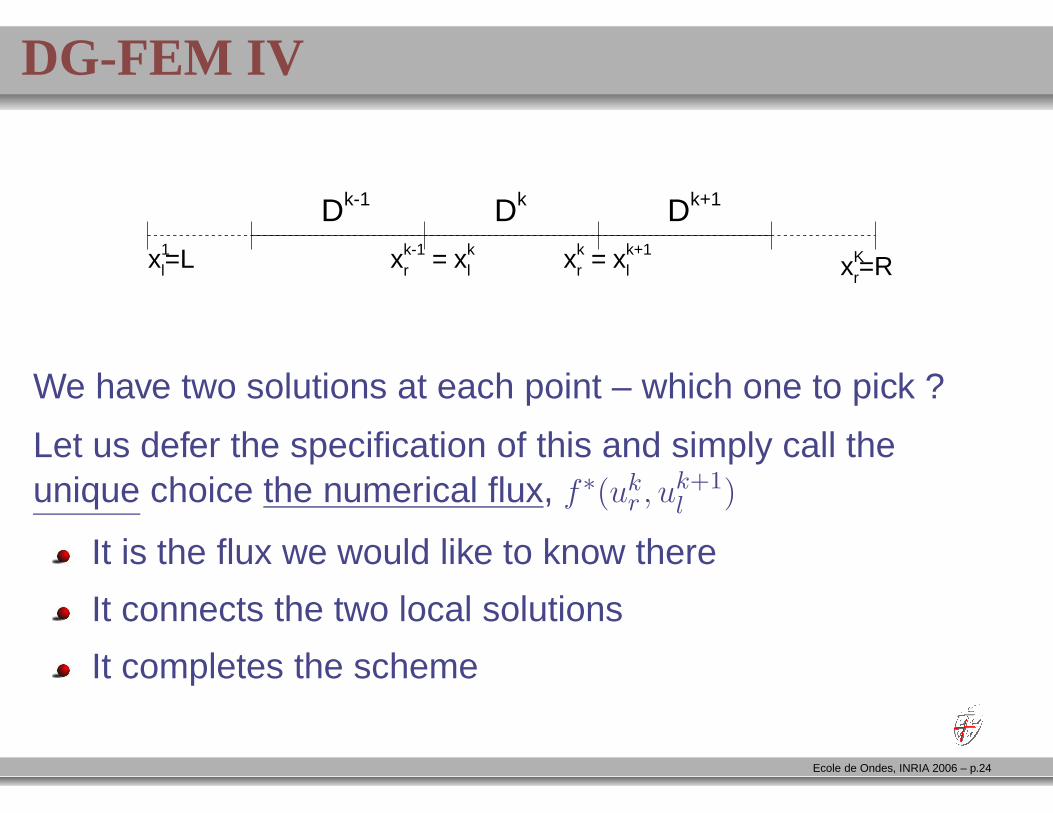
DG-FEM IV
Dk Dk+1Dk-1
x1l=L xK
r=Rxrk-1 = xl
k xrk = xl
k+1
We have two solutions at each point – which one to pick ?
Let us defer the specification of this and simply call theunique choice the numerical flux, f∗(uk
r , uk+1l )
It is the flux we would like to know there
It connects the two local solutions
It completes the scheme
Ecole de Ondes, INRIA 2006 – p.24
DG-FEM V
This yields DG-FEM on weak form
∫ xk+1
xk
∂uh
∂tlkj − fh
dlkj
dx− g(x, t)lkj dx = −
[
f∗lkj
]xk+1
xk
,
Integration once more, yields DG-FEM on strong form
∫ xk+1
xk
Rh(x, t)lkj (x) dx =[
(fh − f∗)lkj
]xk+1
xk
.
Local high-order can be done easily by assuming
ukh(x, t) =
Np∑
n=1
uknψn(x) =
Np∑
i=1
ukk(xi, t)l
ki (x) .
Ecole de Ondes, INRIA 2006 – p.25
DG-FEM VI
To mimic the terminology from the finite element scheme,we have
Mduk
dt− STfk − Mgk = −f∗lk ,
and
Mduk
dt+ Sfk − Mgk = (f − f∗)lk .
With the local matrices
Mij =
∫ xk+1
xk
lki (x)lkj (x) dx , Sij
∫ xk+1
xk
dlkidxlkj (x) dx ,
Ecole de Ondes, INRIA 2006 – p.26
DG-FEM VII
So we have a scheme which seems to catch the best of FEand FV
Element based to ensure geometric flexibility
Support for high-order by local basis
Local nature of scheme well suited for adaptivity
Explicit in time
Emerges from conservation laws, i.e., good for waves
Local in nature, i.e., high potential for parallel execution
This seems to violate the "no free lunch theorem" !
We pay with memory by dublicating surface modes
Ecole de Ondes, INRIA 2006 – p.27
DG-FEM I – A Second View
We now have a sense of the basic idea behind DG-FEM –for a historical overview, check notes (Chapter 1).
A bit of notation
Average
u =u− + u+
2,
Jump
[[u]] = n−u− + n+u+ , [[u]] = n− · u− + n+ · u+ .
Ecole de Ondes, INRIA 2006 – p.28
DG-FEM II – A Second View
Consider the simple scalar one way wave equation
∂u
∂t+∂au
∂x= 0 , x ∈ [L,R] , (1)
subject to the appropriate I.C. and B.C.
u(L, t) = g(t) , a ≥ 0
u(R, t) = g(t) , a ≤ 0.
Recalld
dt‖u‖2
Dk = −a(
u2(xkr ) − u2(xk
l ))
.
This we should mimic.
Ecole de Ondes, INRIA 2006 – p.29
DG-FEM III – A Second View
Dk Dk+1Dk-1
x1l=L xK
r=Rxrk-1 = xl
k xrk = xl
k+1
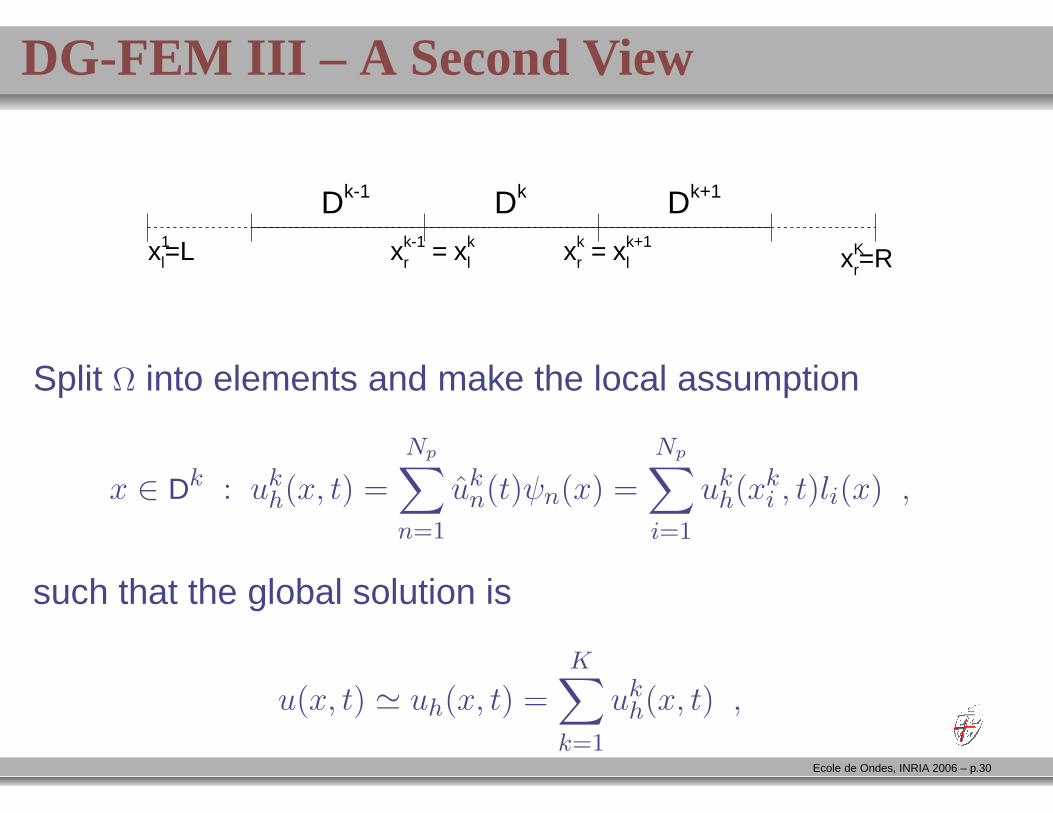
Split Ω into elements and make the local assumption
x ∈ Dk : ukh(x, t) =
Np∑
n=1
ukn(t)ψn(x) =
Np∑
i=1
ukh(xk
i , t)li(x) ,
such that the global solution is
u(x, t) ≃ uh(x, t) =K∑
k=1
ukh(x, t) ,
Ecole de Ondes, INRIA 2006 – p.30
DG-FEM IV – A Second View
We continue as previously and recover the local equation
∫
Dk
(
∂ukh
∂tφl − auk
h
dφl
dx
)
dx = −
∮
∂Dkn(auh)∗φl dx .
Here we have the numerical flux, (auh)∗.
This yields exactly K ×Np equations for the same number ofunknowns.
∫
Dk
(
∂uh
∂t+∂auh
∂x
)
φl dx =
∮
∂Dkn(
aukh − (auh)∗
)
φl dx .
It is the RHS which connects the elements.
Ecole de Ondes, INRIA 2006 – p.31
DG-FEM V – A Second View
In the standard form, φ(x) = ψ(x) and we obtain
Mk d
dtuk
h −(
Sk)T
aukh = − (auh)∗ψ|xk
r+ (auh)∗ψ|xk
l,
Mk d
dtuk
h + Skaukh =
(
aukh − (auh)∗
)
ψ
∣
∣
∣
xkr
−(
aukh − (auh)∗
)
ψ
∣
∣
∣
xkl
,
Mkij = (ψi, ψj)Dk , Sk
ij =
(
ψi,dψj
dx
)
Dk
,
are the local mass- and stiffness matrices, respectively.Furthermore, we have
ukh = [uk
1, . . . , ukNp
]T , ψ = [ψ1(x), . . . , ψNp(x)]T .
Ecole de Ondes, INRIA 2006 – p.32
DG-FEM VI – A Second View
Let us return to the flux – its role is to connect the elements– but how do we choose this flux ?
Assume that we use a nodal approach, i.e.,
x ∈ Dk : ukh(x, t) =
Np∑
i=1
ukh(xk
i , t)li(x) ,
and consider the strong form given as
Mk d
dtuk
h + Skaukh =
[
l(x)(aukh − (auh)∗)
]xk+
xk−
,
Mkij = (li, lj)Dk , Sk
ij =
(
li,dlj
dx
)
Dk
.
Ecole de Ondes, INRIA 2006 – p.33
DG-FEM VII – A Second View
First realize that
uTh Mkuh =
∫
Dk
Np∑
i=1
ukh(xk
i )li(x)
Np∑
j=1
ukh(xk
j )lj(x) dx = ‖uh‖2Dk ,
i.e., it recovers the local energy. Furthermore, consider
uTh Skuh =
∫
Dk
Np∑
i=1
ukh(xk
i )li(x)
Np∑
j=1
ukh(xk
j )dlj
dxdx
=
∫
Dk
ukh(x)(uk
h(x))′ dx =1
2[(uk
h)2]xkr
xkl
.
Thus, it mimics an integration-by-parts form.
Ecole de Ondes, INRIA 2006 – p.34
DG-FEM VIII – A Second View
For the scheme we directly recover
d
dt‖uh‖
2Dk = −a[(uk
h)2]xkr
xkl
+ 2[
ukh(auk
h − (au)∗)]xk
r
xkl
.
For stability, we require, as for the continuous problem, that
K∑
k=1
d
dt‖uh‖
2Dk =
d
dt‖uh‖
2Ω,h ≤ 0 .
We must control the coupling terms at the interfaces(
au2h(x−) − 2uh(x−)(au)∗(x−)
)
−(
au2h(x+) − 2uh(x+)(au)∗(x+)
)
≤ 0 ,
Ecole de Ondes, INRIA 2006 – p.35
DG-FEM IX – A Second View
Hence, the numerical flux, (au)∗, is the key to stability
Let is consider a flux like
(au)∗ = au + |a|1 − α
2[[u]] .
α = 0 - full upwinding
0 < α < 1 - partial upwinding
α = 1 - simple average – central flux
At each interface this gives a contribution like
−|a|1 − α
2[[uh]]2 ≤ 0 for α ≤ 1 .
Ecole de Ondes, INRIA 2006 – p.36
DG-FEM X – A Second View
Summing over all elements, assuming periodicity yields theglobal energy
d
dt‖uh‖
2Ω,h = −|a|(1 − α)
K∑
k=1
[[ukh(xk
r )]]2 .
For α ≤ 1 we have global stability.
Boundary conditions will not change this – assume a > 0,u(x1
l ) = 0
fL = 0 and fR = auh(xKr )
fL = −au1h(x1
l ) and fR = auh(xKr )
Ecole de Ondes, INRIA 2006 – p.37
DG-FEM XI – A Second View
Thus, by choosing the flux, we can guarantee stability andeven energy conservation. Furthermore
The solutions are piecewise smooth, often polynomial,but discontinuous between elements.
Boundary conditions are enforced only weakly.
All operators are local.
But what about accuracy and convergence ?
Ecole de Ondes, INRIA 2006 – p.38
DG-FEM XII – An Example
Let us consider an example
∂u
∂t− 2π
∂u
∂x= 0 , x ∈ [0, 2π] ,
u(0, t) = u(2π, t) , u(x, 0) = sin(lx) .
We solve this problem using the strong nodal form and a 4thorder ERK in time with a small timestep.
We would like to study 3 things
Accuracy dependence on h and N
Accuracy dependence on final time, T .
Computational cost
Ecole de Ondes, INRIA 2006 – p.39
DG-FEM XIII – An Example
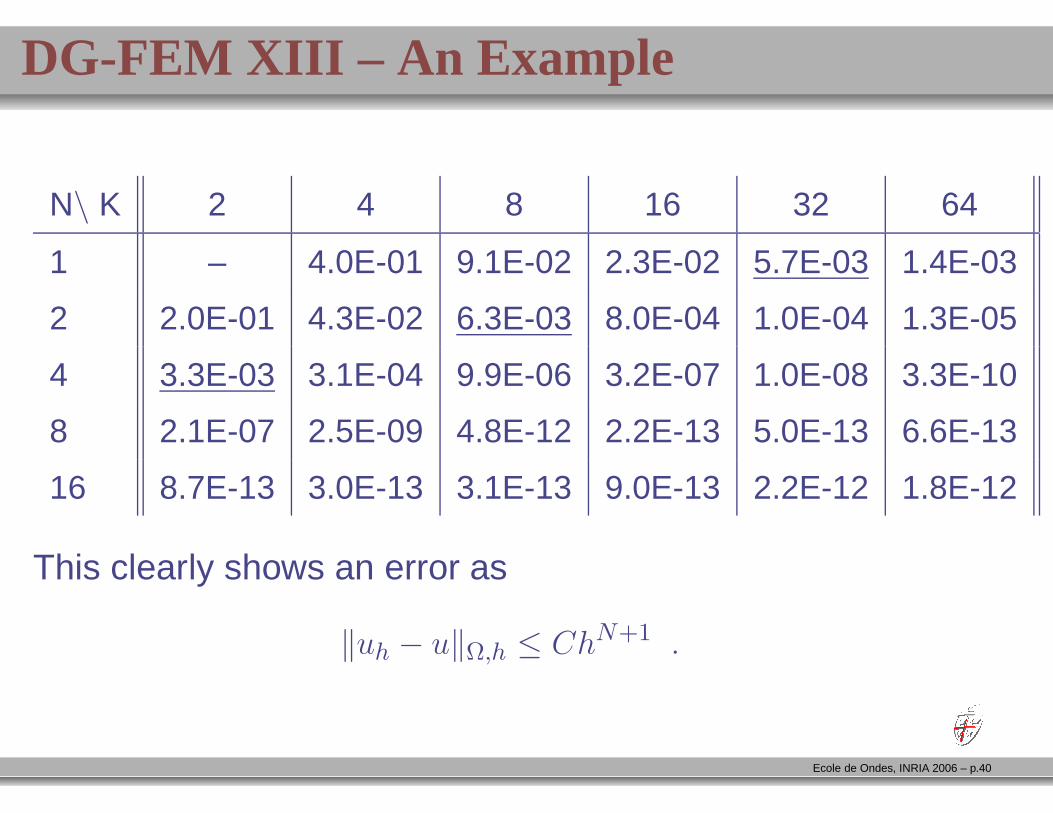
N\ K 2 4 8 16 32 64
1 – 4.0E-01 9.1E-02 2.3E-02 5.7E-03 1.4E-03
2 2.0E-01 4.3E-02 6.3E-03 8.0E-04 1.0E-04 1.3E-05
4 3.3E-03 3.1E-04 9.9E-06 3.2E-07 1.0E-08 3.3E-10
8 2.1E-07 2.5E-09 4.8E-12 2.2E-13 5.0E-13 6.6E-13
16 8.7E-13 3.0E-13 3.1E-13 9.0E-13 2.2E-12 1.8E-12
This clearly shows an error as
‖uh − u‖Ω,h ≤ ChN+1 .
Ecole de Ondes, INRIA 2006 – p.40
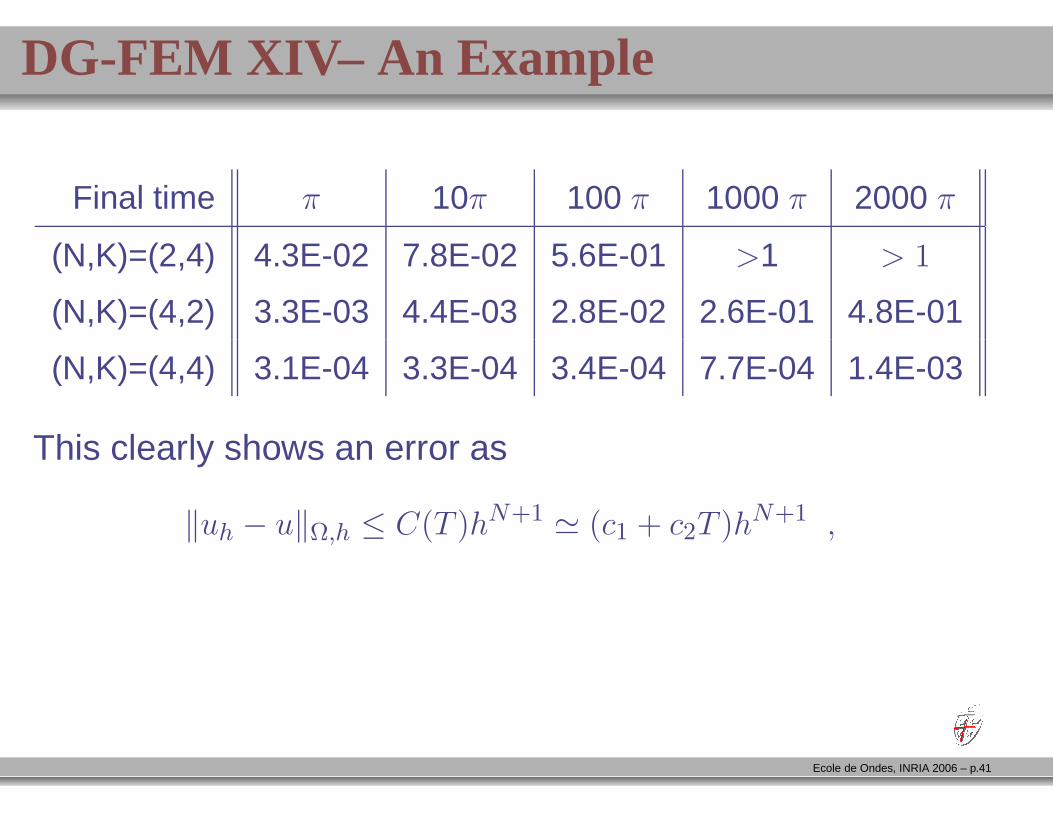
DG-FEM XIV– An Example
Final time π 10π 100 π 1000 π 2000 π
(N,K)=(2,4) 4.3E-02 7.8E-02 5.6E-01 >1 > 1
(N,K)=(4,2) 3.3E-03 4.4E-03 2.8E-02 2.6E-01 4.8E-01
(N,K)=(4,4) 3.1E-04 3.3E-04 3.4E-04 7.7E-04 1.4E-03
This clearly shows an error as
‖uh − u‖Ω,h ≤ C(T )hN+1 ≃ (c1 + c2T )hN+1 ,
Ecole de Ondes, INRIA 2006 – p.41
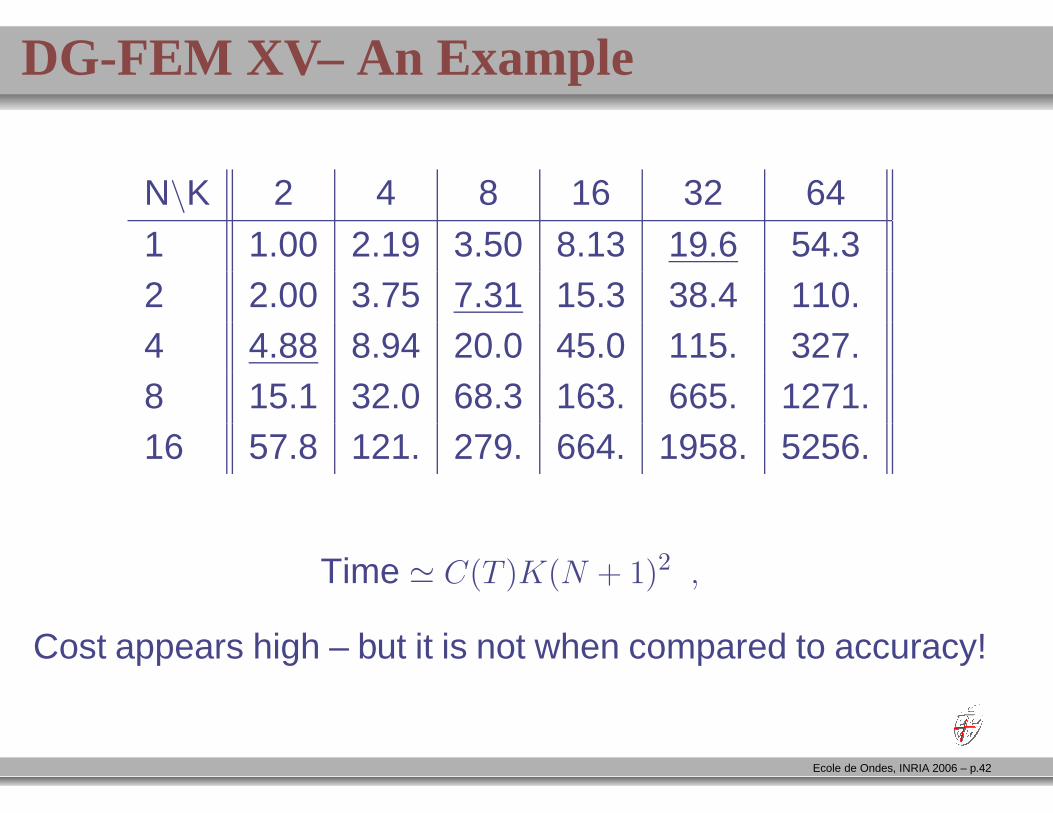
DG-FEM XV– An Example
N\K 2 4 8 16 32 64
1 1.00 2.19 3.50 8.13 19.6 54.32 2.00 3.75 7.31 15.3 38.4 110.4 4.88 8.94 20.0 45.0 115. 327.8 15.1 32.0 68.3 163. 665. 1271.16 57.8 121. 279. 664. 1958. 5256.
Time ≃ C(T )K(N + 1)2 ,
Cost appears high – but it is not when compared to accuracy!
Ecole de Ondes, INRIA 2006 – p.42
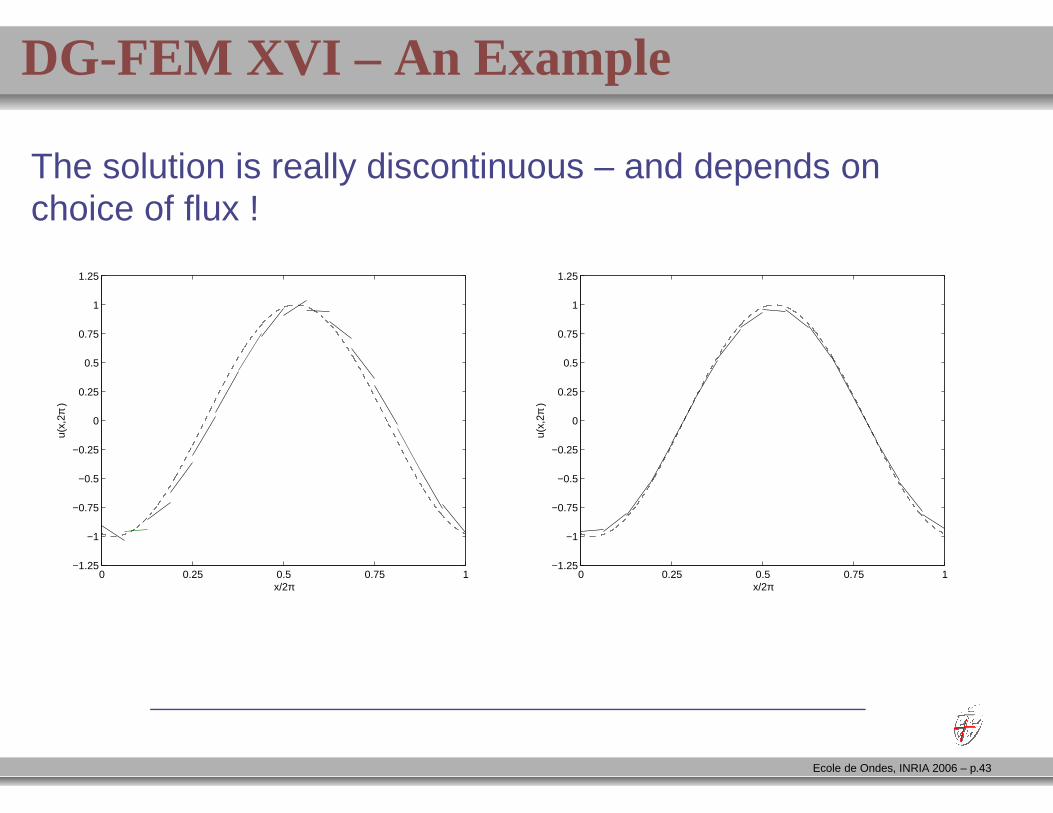
DG-FEM XVI – An Example
The solution is really discontinuous – and depends onchoice of flux !
0 0.25 0.5 0.75 1−1.25
−1
−0.75
−0.5
−0.25
0
0.25
0.5
0.75
1
1.25
x/2π
u(x,
2π )
0 0.25 0.5 0.75 1−1.25
−1
−0.75
−0.5
−0.25
0
0.25
0.5
0.75
1
1.25
x/2π
u(x,
2π )
Ecole de Ondes, INRIA 2006 – p.43
A Brief Summary
The DG-FEM is a mixture of FE and FV methods
The local basis allows for high-order accuracy
The local statement of the PDE yields a local, explicitscheme
The numerical flux is key to ensuring stability
Boundary conditions are not satisfied exactly
. . . is it more memory intensive than FE
What about generalizations – systems, higher dimensions,
nonlinearities ?
Ecole de Ondes, INRIA 2006 – p.44
Scalar Conservation Laws I
The basics remain – but with a few twists.
Consider the scalar conservation law
∂u
∂t+∂f(u)
∂x= 0 , x ∈ [L,R] ,
with I.C. and B.C. as
u(L, t) = g1(t) when fu(u(L, t)) ≥ 0
u(R, t) = g2(t) when fu(u(R, t)) ≤ 0.
Ecole de Ondes, INRIA 2006 – p.45
Scalar Conservation Laws II
Proceeding exactly as above, we have the two schemes
∫
Dk
(
∂ukh
∂tφl − fh(uk
h)dφl
dx
)
dx = −
∮
∂Dknf∗φl dx ,
∫
Dk
(
∂ukh
∂t+∂fh(uk
h)
∂x
)
φl dx =
∮
∂Dkn (fh(uh) − f∗)φl dx ,
where we have
fh(uh) =
Np∑
i=1
fh(xki )li(x) ,
the details of which we will return to in Lecture 4.
Ecole de Ondes, INRIA 2006 – p.46
Scalar Conservation Laws III
How do we choose the flux, f∗ = f∗(u−h , u+h ) ?
We can borrow directly from the extensive FV literaturewhen making this choice
It must be consistent, i.e., f(uh) = f∗(uh, uh)
It must be monotone, i.e. f∗(a, b) must beIncreasing in the first argumentDecreasing in the second argument
. . . or be an E-flux
∀u ∈ [a, b] : (f∗(a, b) − f(u))(b− a) ≤ 0 .
The importance of this will become clear in Lecture 4.
Ecole de Ondes, INRIA 2006 – p.47
Scalar Conservation Laws IV
The FV literature is thick with fluxes of this kind
The Lax-Freidrich flux
fLF (a, b) =f(a) + f(b)
2+C
2n(a− b) ,
Global LF flux
C ≥ maxinf uh(x)≤s≤sup uh(x)
|fu(s)| ,
Local LF flux
C ≥ maxmin(a,b)≤s≤max(a,b)
|fu(s)| .
Roe-flux, Osher-Engquist flux etcEcole de Ondes, INRIA 2006 – p.48
Scalar Conservation Laws V
One easily sees that the LF flux is consistent
fLF (a, a) = f(a) ,
and monotone, e.g.,
∂f∗
∂a=
1
2(fu + C) ≥ 0 .
Furthermore, we also see that if f = au then the LF flux isthe upwind flux, i.e., the value of C controls dissipation – thisis the argument for using the local LF flux – less dissipation.
Note: For nonlinear problems one can not in general take
C = 0.
Ecole de Ondes, INRIA 2006 – p.49
Further generalizations
The extension to the system
∂u
∂t+∂f(u)
∂x= 0 , x ∈ [L,R] ,
is straightforward with
fLF (a, b) =f(a) + f(b)
2+C
2n(a− b) ,
with C = max |fu| – again there are many alternatives.
We will return to multi-dimensional cases in Lecture 3 – but
it works just fine in that case also !
Ecole de Ondes, INRIA 2006 – p.50
Special Case - Linear Systems
The linear problem is of particular interest - EM, acoustics,elasticity etc
Question: How to design an upwind flux for the system?
Let us consider the (hyperbolic) system
M(x)∂u
∂t+ ∇ · F = 0 , F = [A1(x)u,A2(x)u] .
M(x) is invertible and symmetric for all x ∈ Ω.
Ecole de Ondes, INRIA 2006 – p.51
Linear Systems II - Smooth case
We first assume that M(x) and Ai(x) vary smoothlythroughout Ω
M(x)∂u
∂t+ A1(x)
∂u
∂x+ A2(x)
∂u
∂y+ Bu = 0 .
We seek a formulation of a flux along the normal, n.
Consider the operator
Π = (nxA1(x) + nyA2(x)) .
Note in particular that
n · F = Πu .
Ecole de Ondes, INRIA 2006 – p.52
Linear Systems III - Smooth case
The dynamics of the linear system can be understood byconsidering M−1Π
M−1Π = SΛS−1 ,
where the diagonal matrix, Λ, has purely real entries, i.e.
Λ = Λ− + Λ+ ,
Λ− = Λii > 0 – wave leaves domain along n.
Λ+ = Λii < 0 – wave enters domain along n.
This immediately suggests a numerical flux as
(n · F )∗ = MS(
Λ+S−1u− + Λ−S−1u+)
,
Ecole de Ondes, INRIA 2006 – p.53
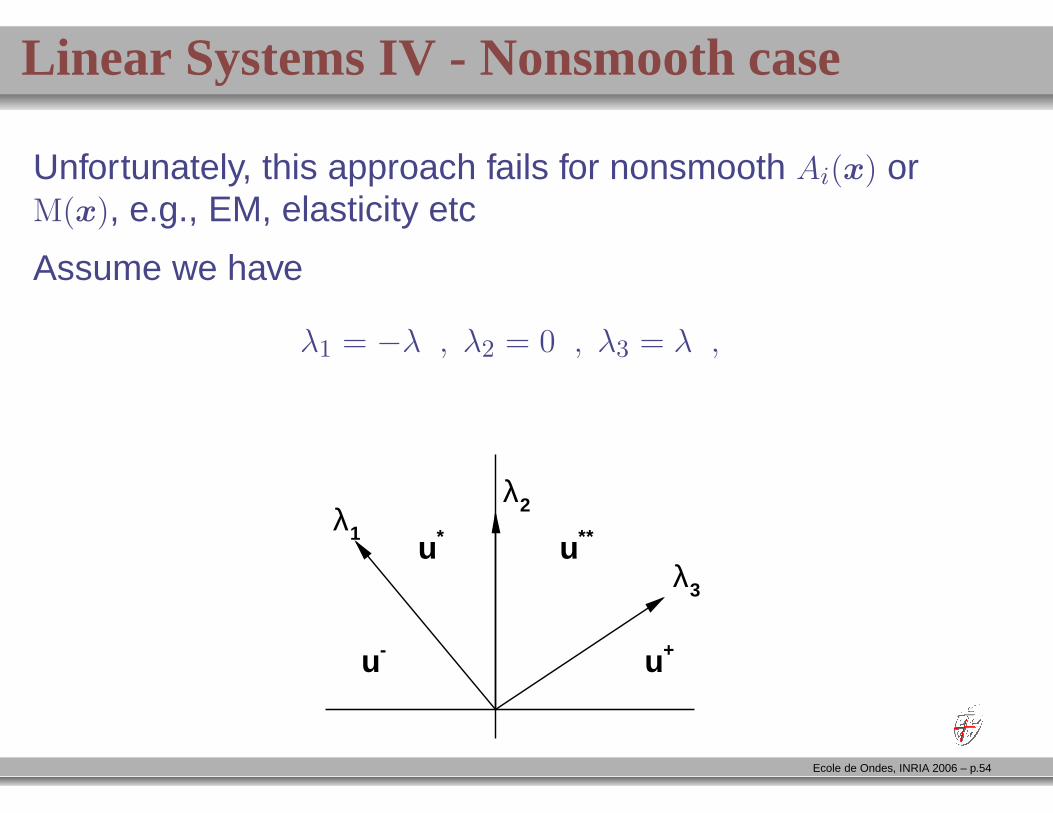
Linear Systems IV - Nonsmooth case
Unfortunately, this approach fails for nonsmooth Ai(x) orM(x), e.g., EM, elasticity etc
Assume we have
λ1 = −λ , λ2 = 0 , λ3 = λ ,
u-
u* u**
u+
λ1
λ2
λ3
Ecole de Ondes, INRIA 2006 – p.54
Linear Systems V - Nonsmooth case
To understand the conditions needed, consider
∂u
∂t+ λ
∂u
∂x= 0 , u = [u−, u+] .
We immediately have
d
dt
∫ b
au dx = −λ (u(b, t) − u(a, t)) = f(a, t) − f(b, t) ,
if we use f = λu. Furthermore, since the velocity λ isconstant we have
d
dt
∫ b
au dx =
d
dt
(
(λt− a)u− + (b− λt)u+)
= λ(u− − u+) .
Ecole de Ondes, INRIA 2006 – p.55
Linear Systems VI - Nonsmooth case
Taking a→ x− and b→ x+, we recover
−λ(u− − u+) + (f− − f+) = 0 .
Known as the Rankine-Hugoniot condition, statingmass-conservation across the jump.
The generalization to the system is
∀i : −λiM[u− − u+] + [(Πu)− − (Πu)+] = 0 ,
This has to hold across each wave-fan (see Fig on IV)
Ecole de Ondes, INRIA 2006 – p.56
Linear Systems VII - Nonsmooth case
For the 3 wave system we recover
λM−(u∗ − u−) +[
(Πu)∗ − (Πu)−]
= 0 ,
[(Πu)∗ − (Πu)∗∗] = 0 ,
−λM+(u∗∗ − u+) +[
(Πu)∗∗ − (Πu)+]
= 0 ,
where (u∗,u∗∗) represents the intermediate states.
The numerical flux can then be obtained by realizing that
(n · F )∗ = (Πu)∗ = (Πu)∗∗ ,
which one can attempt to express using (u−,u+)
Ecole de Ondes, INRIA 2006 – p.57
Linear Systems VIII - Maxwells
The one-dimensional Maxwells equations are[
ε(x) 0
0 µ(x)
]
∂
∂t
[
E
H
]
+
[
0 1
1 0
]
∂
∂x
[
E
H
]
= 0 .
To simplify the notation let us write this
Mqt + Aqx = 0 ,
M =
[
ε(x) 0
0 µ(x)
]
, A =
[
0 1
1 0
]
, q =
[
E
H
]
,
Furthermore, we have
F = Aq λ1,2 = ±(εµ)−1/2 = ±c(x) .
Ecole de Ondes, INRIA 2006 – p.58
Linear Systems IX - Maxwells
Using the Rankine-Hugoniot conditions we recover
c−M−(q∗ − q−) + (Πq)∗ − (Πq)− = 0 ,
−c+M+(q∗ − q+) + (Πq)∗ − (Πq)+ = 0 ,
where
(Πq)± = nAq± = n
[
H±
E±
]
.
q∗ is the intermediate state and (Aq)∗ is the numerical flux.Direct manipulations yields
(c+M+ + c−M−)(Πq)∗ = c+M+(Πq)− + c−M−(Πq)+
+c−c+M−M+(
q− − q+)
.
Ecole de Ondes, INRIA 2006 – p.59
Linear Systems X - Maxwells
More directly
H∗ =1
Z
(
ZH +1
2[[E]]
)
, E∗ =1
Y
(
Y E +1
2[[H]]
)
,
Z± =
√
µ±
ε±= (Y ±)−1 ,
represents the impedance of the medium.
If the medium is continuous, then
H∗ = H +Y
2[[E]] , E∗ = E +
Z
2[[H]] ,
– the Lax-Friedrich flux since Y ε−1 = Zµ−1 = c.Ecole de Ondes, INRIA 2006 – p.60
Linear Systems XI - Maxwells
Consider as a computational example
ε(x)∂E
∂t= −
∂H
∂x, µ(x)
∂H
∂t= −
∂E
∂x,
We solve it in cavity x ∈ [−2, 2] with E(−2, 0) = E(2, 0) = 0.
Furthermore, we have
ε(x) =
1.00 x < 0
2.25 x ≥ 0, µ(x) =
1.00 x < 0
1.00 x ≥ 0.
Ecole de Ondes, INRIA 2006 – p.61
Linear Systems XII - Maxwells
Following the basic approach outlined previously, we recover
MkεdEk
h
dt+ SkHk
h =[
l(xk)(Hkh −H∗)
]xkr
xkl
,
MkµdHk
h
dt+ SkEk
h =[
l(xk)(Ekh − E∗)
]xkr
xkl
,
H∗ =1
Z
(
ZH +1
2[[E]]
)
, E∗ =1
Y
(
Y E +1
2[[H]]
)
,
H− −H∗ =1
2Z
(
n−Z+[[H]] − [[E]])
,
E− − E∗ =1
2Y
(
n−Y +[[E]] − [[H]])
.
Ecole de Ondes, INRIA 2006 – p.62
Linear Systems XIII - Maxwells
Example case is the cavity example
E(k)(x, t) = −[
A(k) exp(iωn(k)x) − B(k) exp(−iωn(k)x)]
exp(iωt) ,
H(k)(x, t) =[
A(k) exp(iωn(k)x) + B(k) exp(−iωn(k)x)]
exp(iωt) ,
B(1) = exp(−i2n(1)ω)A(1) , B(2) = − exp(i2n(2)ω)A(2) ,
A(1) =n(2) cos(n(2)ω)
n(1) cos(n(1)ω), A(2) = exp(iω(n(1) + n(2))) ,
and ω is a solution to the equation
−n(2) tan(ωn(1)) = n(1) tan(ωn(2)) , n(k) =√
ε(k) .
Ecole de Ondes, INRIA 2006 – p.63
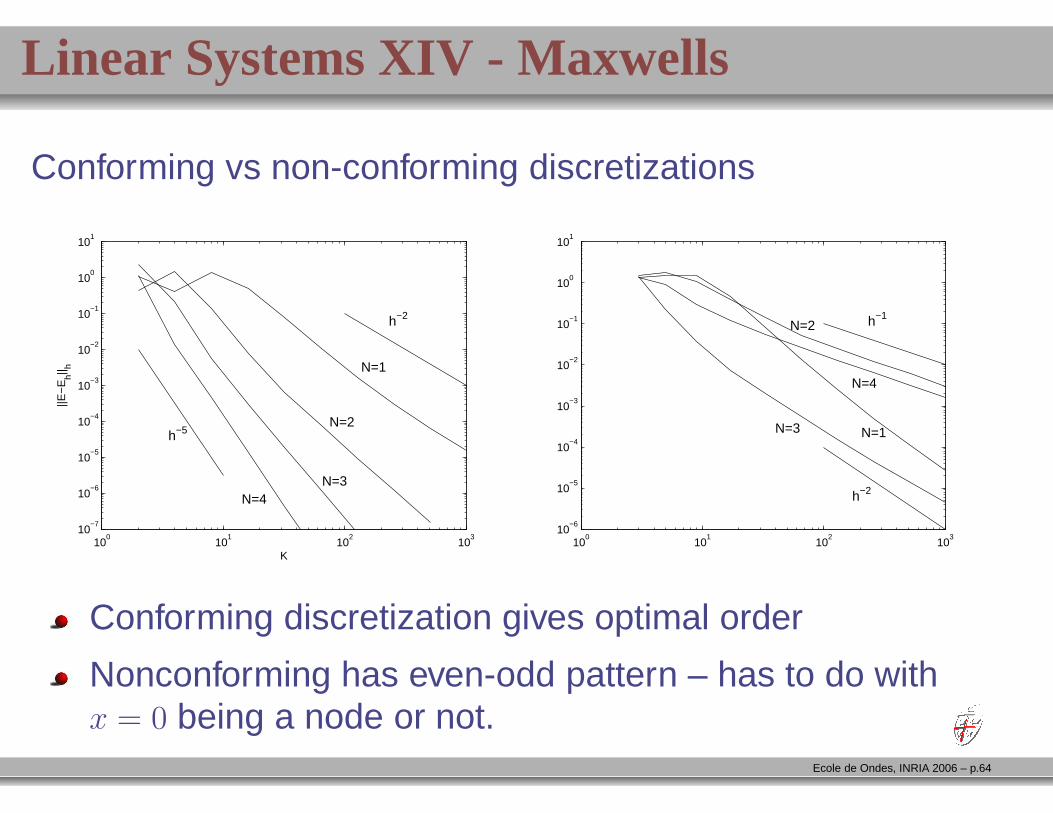
Linear Systems XIV - Maxwells
Conforming vs non-conforming discretizations
100
101
102
103
10−7
10−6
10−5
10−4
10−3
10−2
10−1
100
101
K
||E−
Eh|| h
h−2
h−5
N=1
N=2
N=3N=4
100
101
102
103
10−6
10−5
10−4
10−3
10−2
10−1
100
101
h−1
h−2
N=1
N=2
N=3
N=4
Conforming discretization gives optimal order
Nonconforming has even-odd pattern – has to do withx = 0 being a node or not.
Ecole de Ondes, INRIA 2006 – p.64
Summary of Lecture 1
DG-FEM is a ’best-of-both’ mix of FV and FE
The local basis controls the accuracy of the scheme
N ’th order scheme appears to yield hN+1 accuracy
Stability is controlled by choice of the flux
For linear problems, both central and upwinding can bederived rigorously
For nonlinear problems, monotone fluxes are required
Can we prove these things ? – and what aboutimplementations ? – sit tight for Lecture 2 !
Ecole de Ondes, INRIA 2006 – p.65












![Rome, July 3, 2018 ; D - francescobonaldi.weebly.com · [Fischer and Gaul, 2005]: FEM{BEM coupling, Lagrange multipliers [Flemisch et al., 2006]: ... Semi-discrete problem (SIP dG)](https://static.fdocuments.net/doc/165x107/5d03cce088c99322638bce7e/rome-july-3-2018-d-fischer-and-gaul-2005-fembem-coupling-lagrange.jpg)





