Development of Web-Based E-Quality Control System Principal Investigators: Drs. Richard Chiou and...
1
Development of Web-Based E-Quality Control System Principal Investigators: Drs. Richard Chiou and Yongjin Kwon Research Assistants: Prathaban Mookiah and Satish Anupindi Applied Engineering Technology Goodwin College of Professional Studies, Drexel University, Philadelphia, PA A web-based quality control system via E-machine vision on inspecting part dimensions and tolerance and connecting with robotic operations in manufacturing. The remote accessibility and the ability to control the equipment over the Internet present unprecedented benefits to the current manufacturing environment. Designers located remotely from the production facility can carry out the quality inspection and diagnosis as their design processes evolve. The remote quality monitoring system takes Java as a core and uses it to encode diagnostic data. The use of Java allows for seamless interconnection and data transfer between the different components of the web based quality system and the robots. The Web based control chart can be automatically used to send diagnostic data and commands to on-line rejection of defective parts through Internet based robots. Abstract The project aims to develop an Internet based quality control system for manufacturing through a combination of Internet enabled industrial devices. The final outcome is to enable the quality control personal to receive quality information on the ongoing manufacturing process at a remote location over the Internet. Objective: SYSTEM ARCHITECTURE SYSTEM SETUP SYSTEM SOFTWARE ARCHITECTURE SYSTEM DESCRIPTION All the subsystems are connected to the Goodwin College’s local area network at Drexel University. Cognex DVT 540 Sensor •Used for making inspections and measurements •Equipped with Ethernet port and TCP/IP stack for information exchange •Initially trained to learn the profile and make measurements on the object being tested through the FrameWork software •Once an object is detected by the ObjectFinder soft-sensor, measurements are made automatically through the measurement soft-sensors •Inspection results reported back to application server through a TCP/IP connection Yamaha YK 250X SCARA Robot •Particularly suitable for pick and place or assembly operations with a high degree of accuracy and speed •Variable speed Dorner 6100 conveyor system is connected with the robot’s I/O device ports in order to synchronize the conveyor with the motion of the robot •The robot’s RCX 40 controller is equipped with an Ethernet card and runs a Telnet daemon for remote textual command based operation of the robot Mapping Between Robot – Camera Co-ordinates •Object position has to be mapped from camera coordinates to robot coordinates to guide the robot to the correct pickup position. 0 R T.I R 0 0 ) ( ) ( and , 0 0 , b a y x S S b a y x 0 R I T R Mapping given by: where the robot coordinate vector R, scaling matrix T, image coordinate vector I and the reference robot coordinate vector R 0 are given by: Application Server •The application server is a communications program written in Java •Receives measurement data from the camera through a TCP/IP connection •Makes quality decision based on this data •Instructs the robot through a Telnet connection over TCP/IP to perform the appropriate pickup and place task based on the decision •Exchanges all this information with the user interface through a TCP/IP connection User Interface •User interface implemented through a Java Applet and can be viewed through a web browser •Applet served by the Apache web server •Applet receives information about the ongoing manufacturing process from the application server and displays it to the user Student Learning in E-quality Control System Web-based E-quality Control System 0 5 10 15 20 25 36.5 37 37.5 38 38.5 39 S am ple N um ber M easured D istance (m m) M easurements CL UCL LC L Statistical Process Control Chart for CCD
-
Upload
roxanne-underwood -
Category
Documents
-
view
214 -
download
0
Transcript of Development of Web-Based E-Quality Control System Principal Investigators: Drs. Richard Chiou and...

Development of Web-Based E-Quality Control System
Principal Investigators: Drs. Richard Chiou and Yongjin Kwon Research Assistants: Prathaban Mookiah and Satish Anupindi
Applied Engineering Technology Goodwin College of Professional Studies, Drexel University, Philadelphia, PA
A web-based quality control system via E-machine vision on inspecting part dimensions and tolerance and connecting with robotic operations in manufacturing. The remote accessibility and the ability to control the equipment over the Internet present unprecedented benefits to the current manufacturing environment. Designers located remotely from the production facility can carry out the quality inspection and diagnosis as their design processes evolve. The remote quality monitoring system takes Java as a core and uses it to encode diagnostic data. The use of Java allows for seamless interconnection and data transfer between the different components of the web based quality system and the robots. The Web based control chart can be automatically used to send diagnostic data and commands to on-line rejection of defective parts through Internet based robots.
Abstract
The project aims to develop an Internet based quality control system for manufacturing through a combination of Internet enabled industrial devices. The final outcome is to enable the quality control personal to receive quality information on the ongoing manufacturing process at a remote location over the Internet.
Objective:
SYSTEM ARCHITECTURE
SYSTEM SETUP
SYSTEM SOFTWARE ARCHITECTURE
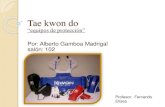
SYSTEM DESCRIPTIONAll the subsystems are connected to the Goodwin College’s local area network at Drexel University.
Cognex DVT 540 Sensor•Used for making inspections and measurements•Equipped with Ethernet port and TCP/IP stack for information exchange•Initially trained to learn the profile and make measurements on the object being tested through the FrameWork software•Once an object is detected by the ObjectFinder soft-sensor, measurements are made automatically through the measurement soft-sensors•Inspection results reported back to application server through a TCP/IP connection
Yamaha YK 250X SCARA Robot•Particularly suitable for pick and place or assembly operations with a high degree of accuracy and speed •Variable speed Dorner 6100 conveyor system is connected with the robot’s I/O device ports in order to synchronize the conveyor with the motion of the robot•The robot’s RCX 40 controller is equipped with an Ethernet card and runs a Telnet daemon for remote textual command based operation of the robot
Mapping Between Robot – Camera Co-ordinates•Object position has to be mapped from camera coordinates to robot coordinates to guide the robot to the correct pickup position.
0RT.IR
0
0
)(
)(
and , 0
0 ,
b
a
y
x
S
S
b
ay
x
0RITR
Mapping given by:
where the robot coordinate vector R, scaling matrix T, image coordinate vector I and the reference robot coordinate vector R0 are given by:
Application Server•The application server is a communications program written in Java•Receives measurement data from the camera through a TCP/IP connection•Makes quality decision based on this data•Instructs the robot through a Telnet connection over TCP/IP to perform the appropriate pickup and place task based on the decision•Exchanges all this information with the user interface through a TCP/IP connection
User Interface•User interface implemented through a Java Applet and can be viewed through a web browser•Applet served by the Apache web server•Applet receives information about the ongoing manufacturing process from the application server and displays it to the user
Student Learning in E-quality Control System
Web-based E-quality Control System
0 5 10 15 20 2536.5
37
37.5
38
38.5
39
Sample Number
Mea
sure
d D
ista
nce
(mm
)
Measurements
CLUCL
LCL
Statistical Process Control Chart for CCD