Orientation and Phase Mapping with Transmission Electron ...

Determination of a Mean Orientation in ElectronBackscatter Diffraction Measurements
JAE-HYUNG CHO, A.D. ROLLETT, and K.H. OH
The average orientation of an electron backscatter diffraction (EBSD) map is calculated by the quaternionmethod and is compared with nonlinear solving by the Hill Climbing and Barton–Dawson methods.An automated EBSD system acquires orientations on a regular grid of pixels based on indexation ofKikuchi patterns and the orientation is described by one of the crystal symmetry–related equivalents.In order to calculate the quaternion average, it is necessary to make a cloud for a set of pixels in agrain. A cloud consists of the representative orientations with small misorientation between each andevery pair of points. The position criterion says that two adjacent pixels have a smaller misorientationthan with all others. With this, the proper equivalent orientation, or representative orientation for thecloud, can be selected from among all the crystal symmetry-related equivalents. The orientation averageis the quaternion summation divided by its norm. The instant average or cumulative average is usefulfor dealing with polycrystalline grains or orientation discontinuity and is also useful for selection ofthe proper orientation of EBSD map with large scattering. The quaternion, Hill Climbing, andBarton–Dawson nonlinear methods are tested with a Gaussian distribution around the ideal texturecomponent, Brass {110}�112�. The accuracy of the three results is similar but the nonlinear methodsare associated with longer computation times than the quaternion method. The quaternion method isadapted for characterization of a partially-recrystallized interstitial-free (IF) steel and randomly distributedBrass, S, and cube texture components according to several different orientation spreads.
I. INTRODUCTION
THE characterization of microstructure and texture in mate-rials is an important issue. Grain size, grain shape, misorien-tations, coincidence site lattice, and texture distribution canaffect the materials properties both directly and indirectly. Tra-ditionally, optical microscopy, scanning electron microscopy(SEM), and transmission electron microscopy (TEM) havebeen used for the measurement of microstructures. Neutronand X-ray diffraction have been used for the texture analysiswhere statistical reliability is important, while TEM and SEMhave been used to obtain more local information.
Recently, the automated electron backscatter diffraction(EBSD) technique, also known as orientation imaging micro-scopy (OIM) has been used as an important tool for quanti-tative characterization of grain, subgrain, and microtextures.It allows a large number of orientations in a cross section ofa material to be measured automatically and directly. Themost important application of EBSD is the direct determina-tion of the local orientations of materials, or the relationshipbetween microstructure and crystallography.[1,2] Field-emissionSEM with EBSD currently yields the most reliable spatial res-olution and angular precision to characterize the microstructure.[3]
As the EBSD has become more popular in materials sci-ence, it is useful to acquire larger data sets and analyze themquickly. Measuring and analyzing speed are dependent onthe EBSD system itself, such as the camera type and analysis
software. It is important to choose the appropriate EBSD sys-tem to suit the specific application. Sometimes, postprocessingof EBSD data by the general user is necessary for subsequentanalysis, such as finite element method analysis that con-siders the complex microstructure and texture, or for recrys-tallization and grain growth simulation based on the deformedstate.
An average or mean orientation of a grain can be obtainedfrom the lattice or pixel orientations measured through EBSD.This article describes methods to obtain the average orien-tation with speed and accuracy. Barton and Dawson used anonlinear method to find the average orientation.[4] Theydefined an objective function, f(�i,�i), where �i is the angleof misorientation between an orientation and the trial solu-tion and �i is the weight of the ith orientation. The averageorientation can be obtained by minimization of this objec-tive function. The nonlinear method of Barton and Dawsonis compared with the quaternion method in this article.
Lassen et al. proposed a statistical analysis of orientationdata.[5] With the singular value decomposition of a matrix,F � �D�, estimates of the average orientation of the setcan be determined. They assumed that the matrix Fisher dis-tribution[6] is a suitable model for the data. Kunze et al. haveproposed that an average orientation is representative of anorientation cluster from EBSD.[7] All possible solutionsobtained from all band triplets are grouped into clusters ofsimilar orientations. Two orientations are considered to bein the same group when the misorientation angle betweenthem is less than the preset interplanar angle tolerance. Theyused the arithmetic mean in quaternion space in order tominimize the mean of the squares of all misorientation anglesbetween the average, , and all other orientations, Q(m).Humbert et al. have proposed the mean orientation from acloud of orientations by two methods, quaternion and ortho-gonal matrices.[8–11]
Q
METALLURGICAL AND MATERIALS TRANSACTIONS A VOLUME 36A, DECEMBER 2005—3427
JAE-HYUNG CHO, Research Associate, is with the Sibley School ofMechanical and Aerospace Engineering, Cornell University, Ithaca, NY14853. A.D. ROLLETT, Professor, is with the Department of MaterialsScience and Engineering, Carnegie Mellon University, Pittsburgh, PA15213-3890. K.H. OH, Professor, is with the School of Materials Science& Engineering, College of Engineering, Seoul National University, Seoul151-744, Korea. Contact e-mail: [email protected]
Manuscript submitted June 2, 2004.

3428—VOLUME 36A, DECEMBER 2005 METALLURGICAL AND MATERIALS TRANSACTIONS A
When identifying a grain in EBSD data, it is necessary todetermine its perimeter (grain boundary) and the average ori-entation within it. Most deformed or recrystallized grains havea subgrain structure, and their overall structure can be describedby the misorientation measures calculated over the set of pix-els contained within the grain and mean orientation. There arethree commonly used types of misorientation measures in agrain. First, grain orientation spread (GOS) expresses the mag-nitude of misorientation among all pixels in a grain. Second,grain average misorientation (GAM) is the quantity calculatedfrom adjacent pixels only, which gives information about near-est neighbor correlations. Scalar orientation spread (SOS) iscalculated between each pixel and the average orientation. TheGAM value is generally smaller than GOS or SOS.[12]
In this article, mean orientation in a grain is discussed inquaternion space. Using crystal symmetry operators and anadjacent position criterion, a cloud representative of each pixelcan be chosen with the smallest misorientation in a grain. Theinstant average can thus be adapted for averaging of grainseven with large spread or orientation discontinuity. The oper-ational issue is that, for any choice of orientation space (para-meterization of the rotations), a cloud of similar orientationsmay cross a symmetry boundary. Thus, if orientations areconfined to the fundamental zone, a cloud may have subsetsthat are far apart in terms of their orientation values despitethe smallness of misorientation between any given pair.
II. THEORETICAL BACKGROUNDOF AVERAGE ORIENTATION
A. Orientation and Misorientation
When we deal with the orientation, sample and crystalsymmetry are considered together. Orientations are charac-terized by three parameters combined in the symbol, g. Theorientation space or Euler space contains every orientationg, which describes the transformation of a sample coordinateKA into a crystal coordinate KB.[13] This space is finite:
[1]
Since an orientation is related to the crystal and sample coor-dinates system, several equivalent orientations can exist depend-ing on the symmetry of both crystal and sample. If we considerthe case of cubic crystal symmetry, there are 24 different waysin which a crystal can be arranged using proper rotational sym-metry operators. This means that there are 24 crystallograph-ically related solutions for an orientation.[14]
There are several ways to parameterize rotations or orienta-tions. A Euler angle is a degree of freedom that represents arotation about one of the coordinate axes. The correspondencebetween angles {, �, �} and {�1, , �2} can be deducedby comparison of the rotation matrix expressed in Roe andBunge.[15,16]
[2]a � w1 � p>2; b � �; g � w2 � 3p>2
(g � {a, b, g}), in Roe/Matthies angles
G: 0 � a, g � 2p; 0 � b � p
(g � {w1,�, w2}), in Bunge Euler angles
G: 0 � w1, w2 � 2p; 0 � � � p
g: 3KA → KB 4 or g�1 � gT: 3KB → KA 4
A rotation can also be represented as a 3 � 3 orthogonalmatrix. The transformation between Euler angles and rotationmatrix is found in Bunge and Matthies.[16,17,18] Orthogonalmatrices have columns and rows of unit length and they aremutually orthogonal (orthogonal group, O(3)). The productof two orthogonal matrices is also orthogonal. The real 3 � 3orthogonal group of matrices with determinant �1 is calledspecial orthogonal matrices (SO). The set of all such orthog-onal matrices with positive unit determinant forms the groupSO(3), and each member of the group corresponds to a properrotation.
Quaternion algebra is also considered as a useful toolfor the description of rotations.[8,19] Quaternion, such asRodrigues vectors, is useful, because it avoids the singular-ity at the origin of Euler angle space. In Euler angles, thefirst and third angles become linearly dependent as the sec-ond Euler angle approaches zero. A unit quaternion q is anordered set of four real numbers of the following form:
[3]
A rotation angle/axis pair, {�,n} is another way to expressthe rotation. The quaternion is related to the rotation angle/axispair or to the Euler angles:
[4]
The quaternion q � {q0;�q} is associated with the inverserotation, g�1. The rotation, g1, followed by rotation g2, cor-responds to quaternion multiplication q1
� q2:
[5]
A misorientation is calculated from the quaternion of grain1, q1, and grain 2, q2. The crystal symmetry-related solutionsfor a misorientation M are generated using symmetry oper-ations as a quaternion, Si:
[6]
[7]
Using quaternion multiplication, the misorientation �qbetween two quaternions, q1 and q2, is as follows:
[8]
The symmetry operators, described as quaternions, Si, are givenin Appendix A.
The Rodrigues vector space is defined by reducing thefour components of a quaternion q to the three componentsof a Rodrigues vector R according to
[9]
where n is the rotation axis and � is the rotation angle.
R(fn) � 11>q0 2(q1,q2,q3) � tan af2bn, �n� � 1
�q (q1, q2) � {q 10 q 2
0 � q1 # q2; q 10 q2 � q2
0q1 � q1 � q2}
M � �q # Si
�q � �q(q1, q2) � (q1)�1 # q2
q1 # q2 � {q 10 q 2
0 � q1 # q2; q 1
0 q2 � q 20 q1 � q1 � q2}
sin b
2 cos
(a � g)
2, cos
b
2 sin
(a � g)
2d
� � ccos b
2 cos
(a � g)
2, �sin
b
2 sin
(a � g)
2,
�q � � ccos av
2b , sin av
2bn1, sin av
2bn2, sin av
2bn3d
q � (q0; q) � (q0;q1,q2,q3), satisfying a3
i � 0q 2
i � 1

METALLURGICAL AND MATERIALS TRANSACTIONS A VOLUME 36A, DECEMBER 2005—3429
Fig. 1—Four-dimensional unit sphere S3 with the geodesic and Euclideandistances. Geodesic distance is a angular distance from qk to q, �k/2 onthe sphere.
As implicated in Eq. [4], there is a two-to-one homomor-phism between the group of unit quaternions and the three-dimensional rotational group SO(3).[20] This means that
the quaternions and
must map to the same rotation R(�n).
In this study, we use positive quaternions (�q) only in Eq. [5].In Appendix B, conversions from rotation matrices are shownto quaternions, angle/axis pairs, and Euler angles.
B. Average of Orientations using Quaternions
Humbert et al. have proposed that the average of orien-tation in a cloud can be calculated using either quaternionsor rotation matrices.[8] Given two quaternions, q and qk, onthe four-dimensional-unit sphere, S3 (Figure 1), the geodesicdistance is the shortest path and equal to the angular distance,1/2�k along the great circle. Another possible distance, theEuclidean distance, is given by
[10]
The mass center of the rotations g will be determined on thebasis of a minimum of the metric distances. The square ofthe distance between two orientations is related to the scalarproduct of the quaternions, :
[11]
For a given set of rotations, gk(k � 1, N), the orientation ofthe mass center is obtained by minimization of the objectivefunction:
[12]1
NaN
k �1 d 2
k �1
N aN
k � 12[1 � (q0q
k0 � q # qk)]
� 2(1 � cos 1
2 vk) � 2[1 � (q0q
k0 � q # qk)]
d 2k � 4 sin2
1
4 vk
q0q0k � q # qk
||q � qk|| � ||I � qkq�1||2
� 4 sin2 1
4 vk
sin 1
2 (f � 2p)n]
[cos 1
2 (f � 2p),[cos
1
2f, sin
1
2fn]
subject to the constraint that ||q||2 � q0q0 � q � q � 1. UsingLagrange multipliers,
[13]
It follows that
[14]
Recalling that the norm of a (unit) quaternion is 1, the followingsolution is obtained:
[15]
Equation [15] shows that the mean orientation or mass cen-ter, , is given by the arithmetic average of the quaternions,qk, normalized by the norm of the sum:
[16]
C. Symmetry Plane in Orientation Space
In the usual Eulerian angle space for cubic-orthorhombiccrystal-sample symmetry, a single orientation is representedby three different points in the Euler space. Each point liesin a different subspace. Using the full cubic symmetry, it ispossible to take one of these three subspaces only. However,these subspaces are not bounded by planes but by curvedsurfaces.[17,19]
The descriptions of quaternion space show some of the char-acteristics of rotations. From Eq. [3] and Figure 1, a rotationcan be interpreted as a surface point of the four-dimensionalunit sphere S3. Considering the definition of the Rodriguesvector, this is equivalent to a geodesic projection of S3 ontoR3. Although it is easier to deal with quaternions than otherrepresentations, the Rodrigues vector is useful for visualizingthe geometrical interpretation of orientation distribution.Rodrigues vectors exhibit a one-to-one relation between ori-entations and their representations (in contrast to quaternions).
In the cubic system, 24 symmetry operations produce the24 cubic equivalent quaternions or Rodrigues vector for agiven orientation. A unique representation of these 24 equiv-alents is found by taking the one with the smallest rotationangle. The smallest rotation angle corresponds to the con-dition that the first component of the quaternion, q0, is largest.From this requirement, Heinz and Neumann[19] showed thatcubic orientation space can be defined as a truncated cubefor Rodrigues vectors. The length of each long edge is and the cube is truncated at its corners by (111)-type planes.The truncated cube has six octagonal side faces lying per-pendicular to the fourfold axes and eight smaller triangularfaces lying perpendicular to the threefold axes. The maxi-mum rotation angle is �62.8 deg for cubic crystals. Thecubic fundamental region in Rodrigues space is shown inFigure 2. The typical Brass texture component with Gaussiandistribution (FWHM, full-width at half-maximum b � 10 degaround {144.74, 45, 270} in Bunge Euler angles) is locatedin the Rodrigues fundamental region. The Brass componentlies on a symmetry plane.
12 � 1
q � 1q1 � q1 � p � qN 2� 0 0q1 � q1 � p � qN 0 0g
qi � bi / 0 0bi 0 0 , bi � (1/N )aN
k � 1 qk
i
�(1/N )aN
k � 1 q k
i � mqi � 0
� m(q0q0 � q # q � 1)f � 0
�
�qie 1
N aN
k � 12[1 � (q0q
k0 � q # qk )]

3430—VOLUME 36A, DECEMBER 2005 METALLURGICAL AND MATERIALS TRANSACTIONS A
(a)
Fig. 2—Brass texture component, {144.74, 45,270}, in Bunge Euler anglesis represented on the truncated cubic fundamental region in Rodrigues’space. The Brass component lies on the symmetry plane: (a) filled regionand (b) transparent region.
(b)
Figure 2 implies another important characteristic of the prob-lem in that, in order to consider the orientation average inquaternion space (similarly in Rodrigues space), the finite cubicfundamental region is not appropriate. Although the Rodriguesspace has a one to one representation for orientation, the sym-metry plane bounding the fundamental region can contain pairsof points that have small disorientation angles between themand yet are far apart in space. This is inconvenient for com-puting the arithmetic average so the fundamental zone or dis-orientation zone is not appropriate for calculating the meanorientation of a set of points. Crystal symmetry is used to placeall the orientations close to one another and minimize the mis-orientations between them, but it is not helpful to confine thecloud to any particular (copy of the) fundamental zone, becausewe do not want the cloud to be divided by a symmetry plane,as shown in Figure 2.
D. Position Criterion and Instant Average
In the analysis of microtexture and microstructure, inter-pretation of a Kikuchi pattern is important in TEM and EBSD.The automatic procedure for obtaining lattice orientations
from a Kikuchi pattern generally involves several steps.[21]
The bands in the diffraction patterns represent planes inthe crystal. The widths of the bands are a function of the d-spacing of the corresponding crystallographic planes. Theangles between bands in the patterns are directly related tothe interplanar angles in the crystal lattice. After the planesrelated to pairs of bands have been identified, the orientationof the crystal can be calculated. The Kikuchi pattern is directlyrelated to the orientation of the planes in the sample.
Interplanar angles and bandwidths in Kikuchi patterns arenot affected by the sample symmetry but are solely a func-tion of the crystal structure. Figure 3 shows Kikuchi pat-terns for the typical texture components for a particularcamera and microscope geometry. Kikuchi patterns for theS component, {123}�634�, have four different variants.All of them have the same interplanar angle and bandwidth,but the band positions are related by rotation and mirroroperations. These four examples of Kikuchi patterns arerelated by sample symmetry only and the orientation setsfor them are sample symmetry-related equivalent positions.The Brass {110}�112� and Copper components {112}�111�have two sample symmetry-related variants of Kikuchi pat-terns. Goss and cube have one variant and sample symme-try does not affect the band positions. It is assumed that ina given grain only one type of Kikuchi pattern will appear.This is useful information for determining an orientationcloud in a grain. Although an orientation set in a grain mea-sured by EBSD has some spread from its average, these ori-entations can be collected into a cloud by using crystalsymmetry operations only.
An orientation cloud or cluster is a set of orientations withsmall misorientation angles between them, and it can beobtained from pixel orientations in a grain with the appro-priate procedure. Orientations generated by an automaticEBSD system are the most likely solutions calculated fromall band triplets. Each orientation is associated with a set of24 crystal symmetry-related equivalent points. The orienta-tion of a pixel can be expressed by one of the crystal sym-metry-related equivalent points that is arbitrarily chosen inan EBSD voting algorithm. When evaluating the averageorientation using the quaternion method, it is necessary tofind a cloud with orientations of minimum misorientationbetween each other.
As pointed out previously, there is no difference betweendiffraction patterns of crystal symmetry-related orientations.One of the crystal symmetry-related orientations in the votingtable is given as a solution for a Kikuchi pattern in an auto-mated EBSD system. Pattern indexing and orientation deter-mination are carried out for a known crystal structure andsample symmetry is assumed to be triclinic. Table I showsexamples of two types of orientation spread in a grain mea-sured in a specimen of recrystallized pure copper. One is asmall deviation from its mean orientation which is as expectedin light of the inherent variability in orientation measurementin EBSD and the orientation gradients that can be present ina grain even after recrystallization. The other is a crystal-symmetry-related spread where the orientations at locations 1,2, 5, 8, and 13 show markedly different values from the otherseven though they represent valid solutions for the diffractionpattern. In fact, the latter is more critical for the quaternionaverage because of the large distance in orientation space, eventhough they are within the same grain. Figure 4 illustrates the

METALLURGICAL AND MATERIALS TRANSACTIONS A VOLUME 36A, DECEMBER 2005—3431
(a) (b) (c) (d ) (e)
( f ) (g) (h) ( j)(i)
Fig. 3—Kikuchi patterns for several orientation components and a particular configuration of the scintillation screen and microscope. The variants for theKikuchi pattern of an orientation only change when sample symmetry operators are applied. In a given grain, only one type of Kikuchi pattern is obtained.(a) through (d ) four variants of the S component. (e) and ( f ) for Brass (g) and (h) for Copper, (i) Goss, and ( j) cube.
two different types of deviation for a set of EBSD Kikuchipatterns and their corresponding positions in Euler space.
In order to construct an orientation cloud with minimummisorientation between adjacent elements, we use the posi-tion criterion and the instant average. Both methods assistin identifying the proper orientation cloud for computing thearithmetic average. First, the position criterion is based onthe assumption that orientations in a grain are given by acontinuous function and that there are orientation gradi-
ents. When orientation distributions can be assumed to bea continuous function within the grain, this means that
with
[17]
lim�y→0
�x→0
Misorientation(g(x,y), g(x � �x,y � �y))
�x # �y� 0
g(x, y) � {g(x, y) 0� (x,y) � a grain}
Table I. Orientation Set of a Single Grain in Recrystallized Pure Copper; Neither the Euler Angles, {�1, �, �2} nor theDerived Quaternion {q0;q1,q2,q3} is Appropriate for Computing the Arithmetic Average Directly; the Set of Quaternions
Obtained by Minimizing Intragrain Misorientation {Q0;Q1,Q2,Q3}, Permits an Arithmetic Average Orientation to beCalculated; Mean Orientation of Euler Angles, {174.99, 36.44, 141.50}, is Reconverted from Mean Quaternion Value,
i.e., {0.882; 0.299, 0.090, 0.352}
Point �1 �2 q0 q1 q2 q3 Q0 Q1 Q2 Q3 Mis.*
1 172.18 36.94 53.36 0.367 �0.273 �0.875 �0.161 0.878 0.307 0.079 0.359 1.7962 232.79 111.55 120.04 0.561 �0.688 �0.035 �0.458 0.884 0.299 0.090 0.349 0.4333 355.32 144.11 128.47 0.145 �0.873 0.272 0.378 0.885 0.295 0.090 0.350 0.6554 355.28 143.73 128.78 0.146 �0.873 0.275 0.375 0.883 0.298 0.091 0.352 0.2485 52.64 69.02 149.73 0.160 0.425 �0.808 �0.375 0.884 0.299 0.084 0.349 0.7766 354.39 143.61 127.81 0.151 �0.873 0.273 0.376 0.883 0.300 0.087 0.351 0.4147 356.79 143.60 129.98 0.140 �0.872 0.279 0.377 0.883 0.296 0.099 0.350 1.0698 232.76 111.41 119.86 0.562 �0.689 �0.036 �0.457 0.884 0.297 0.089 0.348 0.5509 356.28 143.32 129.52 0.143 �0.871 0.280 0.377 0.882 0.299 0.097 0.350 0.804
10 354.50 143.77 128.25 0.149 �0.874 0.273 0.373 0.882 0.298 0.088 0.354 0.39011 355.94 142.67 129.40 0.147 �0.870 0.284 0.374 0.880 0.305 0.097 0.351 1.06412 354.73 143.57 128.99 0.147 �0.875 0.276 0.369 0.880 0.299 0.091 0.358 0.72013 310.54 62.60 204.88 0.182 �0.414 0.835 �0.314 0.883 0.298 0.093 0.351 0.46914 355.03 143.67 128.35 0.148 �0.872 0.274 0.376 0.883 0.299 0.090 0.351 0.21315 354.08 143.32 128.46 0.151 �0.875 0.276 0.368 0.879 0.302 0.088 0.358 0.913Mean 174.99 36.44 141.50 — — — — 0.882 0.299 0.090 0.352 0.701
Notes: {�1, , �2}: Bunge Euler angle.{q0;q1,q2,q3}: quaternion converted from Bunge angle.{Q0;Q1,Q2,Q3}: representative quaternion recalculated from {q0;q1,q2,q3}.Mis.*: Misorientation angle (deg) from mean orientation.

3432—VOLUME 36A, DECEMBER 2005 METALLURGICAL AND MATERIALS TRANSACTIONS A
Fig. 5—Searching scheme of adjacent points for pixels in a square grid.
where g(x,y) is the orientation function and (x,y) is the posi-tion. During EBSD measurement, the pixel orientations donot have a continuous function but instead possess a dis-crete distribution according to pixel size:
[18]
where � is the displacement or step in EBSD measurementand � is the misorientation angle allowed within a grain. Whenthe discrete orientation function g(xi ,yj) is given, misorienta-tion between adjacent pixels is smaller than between moreremote pairs of pixels. Four adjacent pixels are plotted in Fig-ure 5 for the case of a rectangular grid. The search for adja-cent points is made in all four directions and the adjacentorientations must satisfy the position criterion:
[19]
[20]
where, � grain_id is the critical misorientation angle for grainidentification and gad(x,y) is the pixel adjacent to g(x,y).The position criterion states that adjacent pixels in a grainmust have a smaller misorientation between them than otherpixels in the grain. Cubic crystal symmetry means that eachorientation has 24 equivalents and the misorientation betweenthem is more than 90 deg. Therefore, there are up to 24 equiv-alent orientation clouds for a given set of pixels in a grain(Figure 6). Each cloud contains equivalent orientations withthe smallest misorientation between adjacent pixels. The ori-entations in the same cloud satisfy both the position crite-rion and the minimum misorientation criterion between them.
[21]j q
pxi (x,y) � S crystal
j# qpx
i (x,y), j � 1, 24 in cubic crystal
uposition � Misorientation (g(x,y), gad(x,y))
uposition � u
grain _id
with lim�y→d�x→d
Misorientation(g(xi,yj), g(xi � �x,yj � �y))
�x # �y� u
g(xi, yj) � {g(xi, yj) 0� (xi, yj) � a grain}
where S crystal is the crystal symmetry operator and qad (x,y)is an adjacent quaternion to the (x,y) pixel. The averageorientation expressed by quaternion, , is given as
[22]
where, (x,y) is a representative quaternion correspondingto an orientation g(x,y) and satisfying the position criterion.The term A is the area of a grain concerned. In Table I, theset of Euler angles {�1, , �2} is experimental data from theEBSD system and {q0;q1,q2,q3} is the quaternion calculated
qrepk
q � Q/ ||Q||, Q �1
NaN
k q rep
k (x,y)
q � Q/ ||Q||, Q �1
A ∫ ∫ qrep (x,y) dxdy or
qqpx
i
qrepi (x,y) � j q
pxi (x,y), when min{�q(qad(x,y), jq
pxi (x,y))}
Fig. 4—Euler space and schematic EBSD pixel map in a grain. The pix-els in the EBSD map have their Kikuchi patterns in a grain. Kikuchi pat-terns are slightly different from each other and there are two types oforientation deviations (shown with solid and dashed lines). Each Kikuchipattern corresponds to a set of equivalent positions in Euler space. Theblack spots in Euler space show the crystallographically equivalent posi-tions. (a) Euler space and equivalent black spots. (b) Each pixel and cor-responding Kikuchi patterns in a grain.
Fig. 6—EBSD data set and their 24 clouds.
(a) (b)

METALLURGICAL AND MATERIALS TRANSACTIONS A VOLUME 36A, DECEMBER 2005—3433
from the Euler angles with Eqs. [2] and [4]. The quaternion,{Q0; Q1, Q2, Q3}, is a representative set that minimizes themisorientation of the corresponding qi. The term Qi satisfiesthe position criterion and consists of a cloud with minimummisorientation; Qi exhibits a more reasonable and clustereddistribution for computing the arithmetic average than qi, asshown in Table I.
The position criterion is sufficient for determining theaverage orientation generally in an approximate sense. Thiscriterion, however, does not work for cases where orienta-tion discontinuities exist between adjacent pixels in a grainor sets of widely scattered pixels. In this case, an instantaveraging or cumulative average is helpful for choosingthe representative orientation of pixel for a cloud. It can bedefined by
[23]
Two types of misorientation can be defined as follows:
[24]
where and , are two adjacent pixels. The � instant is givenby misorientation between instant average orientation (or run-ning average) and the next pixel. The �position is defined by themisorientation between adjacent two pixels. When two typesof misorientations, � instant and �position, are calculated, the appro-priate representative orientation for the next pixel with dis-continuity satisfies
[25]
This is clear from their definitions. For materials with acontinuous orientation function, �instant � �position is expected.The instant average method is useful for the characteriza-tion of the entire EBSD map, which contains all grains. Itis also possible to define the map orientation containing allorientations in the entire EBSD map.
The calculated average values based on the quaternion meanfor the equivalent 24 clouds are slightly different from eachother. We will discuss this further in Section IV–B (Figure 13).Any 24 clouds with smaller scattering than FWHM b � 15 degin Gaussian distribution have less than 1 deg misorientationbetween the calculated and the ideal orientations. When theclouds consist, however, of orientations with larger FWHMthan 15 deg, certain of the 24 clouds have a larger misorien-tation angle between calculated and ideal orientation. Theseclouds exhibit a larger spread from the mean orientation. TheSOS between the calculated cloud average orientation and eachelement of a cloud can be determined. The choice of whichcloud is optimum for computing the quaternion average is madeby selecting a cloud with a smaller SOS value. When the firstorientation in a cloud is selected to be in the Rodrigues fun-damental region (i.e., close to the origin) or, equivalently, tohave the largest q0 value, a smaller SOS value will be obtained.
E. Nonlinear Method
We compared two nonlinear approaches for orientationaverage. The Barton–Dawson nonlinear method for deter-
uinstant � u
position
qrepiqrep
i�1
uposition � Misorientation(qrepi�1 , qrep
i )
uinstant � Misorientation(qinstanti�1 , qrep
i (x,y)) and
q instanti �
qinstanti�1
# 0 0qinstanti�1 0 0 � qrep
i (x,y)
0 0qinstanti�1
# 0 0qinstanti�1 0 0 � qrep
i (x,y) 0 0
mining the average lattice orientation can be found in Ref-erence 4. As in Barton–Dawson’s nonlinear methods, anothernonlinear solving, the Hill Climbing procedure, can also beadopted. Hill Climbing seeks a set of values for the variablesthat minimizes (or maximizes) the objective function whileremaining within the constraints.[22] Starting from an initialposition on the landscape, the optimizer attempts to walkdownhill until a minimum is found. Figure 7 shows the basicstructure for the Hill Climbing algorithm. The objective func-tion is given with the variables of misorientation.
[25]
[26]
[27]
[28]
where is the misorientation angle between orientation C(i)
and trial solution or average orientation during each itera-tion, CN. The �(i) are the weights of each of the n orienta-tions, with �(i) � 0. The Sj are the crystal symmetry operatorsand j takes values 1 through 24 for cubic crystal symmetry.
III. COMPARISON OF QUATERNION AVERAGEAND NONLINEAR METHODS
Three methods, quaternion average, Hill Climbing, andBarton–Dawson nonlinear approaches, are discussed with
u(i)m
C(i)m � CN
# (C(i))�1
u(i)m � Minimum cacos e trace(C (i)
m# Sj) � 1
2fd
u � an
i�1f
(i) # u(i)m
f � f(u)
Fig. 7—Flow chart for the Hill Climbing procedures in average orientation.

3434—VOLUME 36A, DECEMBER 2005 METALLURGICAL AND MATERIALS TRANSACTIONS A
Fig. 8—Brass component with Gaussian distribution (b � 12.5 deg) in the111 pole figure.
the calculation time and accuracy. The time and accuracywere tested with a known standard orientation distribution.[17]
A distribution of orientations based on the Brass componentwith Gaussian distribution (FWHM, b � 12.5 deg) was gen-erated and used. Sample symmetry was taken to be triclinicas for the EBSD data.
A. Calculating Accuracy
A personal computer with WINDOWS XP* system a mobile
*WINDOWS XP is a trademark of Microsoft Windows Operating Systems.
CPU 1.6 GHZ, was used for the quaternion average and HillClimbing methods. The Barton–Dawson nonlinear methodwas tested in Linux Kernel 2.4.20–28.7 smp, Red Hat Linux7.3, which had AMD Athlon MP 2000 (1.7 GHz, Dual CPUs).
Figure 8 shows the 111 pole figure of 10,000 single crys-tals scattered around the Brass component. The mean of theorientation set is located at {144.74, 45, 270} in Bunge Eulerangles or {110}�112� in Miller indices. The misorienta-tion angle distributions for 100, 1000, 10,000, 50,000, 100,000,and 1,000,000 single-crystal sets around Brass are shown inFigure 9 for the Hill Climbing, Barton–Dawson, and quater-nion methods. Although the number of crystals consisting ofBrass distribution increases from a hundred to a million, themisorientation angles between the ideal Brass component andthe average orientation remain less than 2 deg. Three meth-ods of Hill Climbing, Barton–Dawson, and the quaternionresults show very similar accuracy.
B. Calculation Time
Figure 10 shows the calculation time for the three meth-ods. The quaternion method usually takes less time than non-linear methods, Hill Climbing and Barton–Dawson. Generally,a nonlinear method takes more time than linear methods.The quaternion method is a type of arithmetic average, how-ever, and is very straightforward. The computation time forboth the Hill Climbing and the quaternion methods scalelinearly with the number of crystals. For 10,000 orientations,
about 0.03, 0.08, and 2.8 seconds are required for quater-nion, Barton–Dawson, and Hill Climbing, respectively. Thetime consumed increases up to around 3, 7, and 125 sec-onds for 1 million orientations. Although the Barton–Dawsonnonlinear method was tested in the faster machine, it takestwice as much time as quaternion and less time than HillClimbing.
IV. APPLICATIONS OF MEAN ORIENTATIONBY THE QUATERNION METHOD
The application of mean orientation has been implementedin the program REDS, which is a generalized EBSD dataanalysis code.[23]
Fig. 9—Calculation accuracy of arithmetic mean by quaternion and non-linear approaches by Hill Climbing and Barton–Dawson.
Fig. 10—Time consumption of arithmetic mean by quaternion and nonlinearapproaches by Hill Climbing and Barton–Dawson. Quaternion and HillClimbing methods were tested in the Windows XP system, with a mobileCPU 1.6 GHZ; while the Barton–Dawson nonlinear method was tested inLinux with AMD Athlon 1.7 GHz, Dual CPUs.

METALLURGICAL AND MATERIALS TRANSACTIONS A VOLUME 36A, DECEMBER 2005—3435
A. Continuous Orientation Distribution in a PartiallyRecrystallized IF Steel
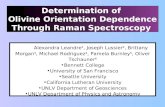
The lattice orientations of a grain in many materials canbe assumed to have a continuous orientation distribution. Anexample of a partially recrystallized interstitial-free (IF) steelshows the intensity mainly lying along the -fiber (�110�//RD)and �-fiber (�111�//ND), as illustrated in Figure 11. Mea-sured and averaged orientation maps are shown in Figures 11(a)and (b). The largest grain is roughly {100}�110� and belongsto the fiber. The recrystallized and deformed regions canbe separated easily by setting a threshold value in SOS. Thedeformed regions have a larger SOS than the recrystallized, andit is possible to separate the two regions.[24] Although some�111�//ND fiber remains in the deformed regions in Fig-ure 11(d), much of the region seems to be already recrystal-lized (Figure 11(c)). The map orientation of Figure 11 is givenby {183.8, 21.1, 123.0} or {3 2 12}�26 33 1�.
B. Discontinuous Orientation Distribution
10,000 single crystals related to the Brass texture weregenerated with a Gaussian distribution and several differ-
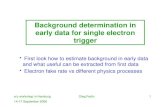
ent values of the FWHM. The orientations are randomly dis-tributed in a spatial map so that adjacent orientations havediscontinuities in orientation. Figure 12 shows a spatial mapwith orientation distribution with b � 40 deg randomly dis-tributed around the Brass texture. The grain sizes changedrastically according to the choice of grain identificationangle or cutoff angle. With a choice of 63 deg (the maxi-mum misorientation angle for cubic crystals), all pixels arelocated in a single grain (Figure 12(d)). A grain identifica-tion angle of 15 deg is associated with many small grains,each of which consists of only a few pixels (Figure 12(a)).The maps in Figure 12 show the grain size dependence onthe identification angle.
The FWHM values from the set {7.5, 10, 12.5, 15, 17.5,20, 30, and 40 deg} were investigated for three typical tex-ture components, S {123}�634�, Brass {110}�112�, andcube {100}�100�. The misorientations between each of theideal and average orientations calculated by the quaternionmethod are shown in Figure 13. Since the starting orienta-tion in each grain has 24 variants, there can be 24 cloudsassociated with orientation distributions as in Figure 6. Smallervalues of FWHM than 15 deg give good results for most of
(a) (b)
Fig. 11—Partially recrystallized IF steel is measured with HR-EBSD. The inverse pole figure orientation maps along ND are shown. Grain identification,angle � 5 deg and quaternion average is used. (Mapping: courtesy of Kim[24]): (a) before average, (b) after average, (c) recrystallized regions, and (d) deformedregions.
(c) (d)
(a) (b) (c) (d)
Fig. 12—Brass texture with 10,000 single crystals (FWHM, b � 40 deg). Their positions are randomly distributed in a grain: (a) grain ID � 15 deg, (b) grainID � 30 deg, (c) grain ID � 40 deg, and (d ) grain ID � 63 deg.

3436—VOLUME 36A, DECEMBER 2005 METALLURGICAL AND MATERIALS TRANSACTIONS A
the 24 clouds, i.e., less than misorientation angle 1 deg. Largervalues of the FWHM, however, require a more careful choiceamong 24 clouds, such as the Brass-type texture. As men-tioned in Section II–E, some clouds with the large misori-entation angle between ideal and average orientation comefrom larger orientation spreading in a cloud comparatively.These clouds are also located farther apart from the originin Rodrigues space or a smaller value of q0 in quaternionspace. Therefore, it is recommended that a cloud be startingwith the orientation of the smallest Rodrigues vector or thelargest q0 among the available equivalents. Those clouds
made in this way are the smaller SOS clouds. The modelstudies in Figure 13 show that orientation distributions evenwith large FWHM (b � 30 or 40 deg) have less than 1 degmisorientation angle from ideal orientation for these clouds.Figure 14 shows the SOS distribution for the correspondingFigure 13 (b � 40 deg case shown only). The larger SOScloud in Figure 14 shows the larger misorientation angle inFigure 13. For a distribution based on cube with b � 40 deg,cloud numbers 3, 9, and 19 have larger SOS and larger mis-orientation angles between ideal and calculated orientations.For S distribution b � 40 deg, clouds 8, 15, 18, 21, and 24have larger SOS values and larger misorientation anglesas well.
V. CONCLUSIONS
The average orientation of an EBSD map has been cal-culated using the quaternion method and nonlinear methods,Hill Climbing and Barton–Dawson.
(a)
(b)
Fig. 13—Misorientations between ideal and average orientations are shownaccording to 24 clouds for S, Brass, and cube textures. Their positions areassumed to be randomly distributed in a grain and 10,000 crystals generatedby Gaussian distribution. (a) S, (b) Brass, and (c) cube.
(c)
(a)
(b)
(c)
Fig. 14—SOS are shown according to 24 clouds for S, Brass, and cubetextures (FWHM � 40 deg only) in Fig. 13: (a) S, (b) brass, and (c) cube.

METALLURGICAL AND MATERIALS TRANSACTIONS A VOLUME 36A, DECEMBER 2005—3437
1. A cloud with a small orientation spread can be averagedby quaternion summation divided by its norm. A cloudconsists of orientations that minimize the misorientationbetween them. Both position criterion and instant aver-age are necessary to make a cloud in a grain.
2. The position criterion means that any pair of adjacent pixelsin a grain is required to have a smaller misorientation thanwith other pixels. The correct representative of a pixel to joina cloud is selected among the 24 equivalent orientations.
3. The instant average or cumulative average is useful forcalculation of the average orientation of polycrystals ora grain with orientation discontinuity. It can be used forcharacterization of map orientation. It is recommendedthat a representative of the first pixel in a cloud be cho-sen the largest q0 or smallest Rodrigues vector amongavailable 24 equivalents.
4. The quaternion and nonlinear methods show similar accu-racy of results for the example of a Brass texture withGaussian distribution. However, the calculation time ofthe quaternion method is more efficient than that of non-linear approaches.
5. An example of a partially-recrystallized IF steel showedthe typical - and �-fibers. Most of the �-fiber–orientedpixels lie within recrystallized grains, which are identifiedby the SOS calculated from the mean orientation andeach of the pixels in a grain.
6. Brass, S, and cube textures with small FWHMs ofGaussian distribution (b � 15 deg) are averaged well bythe quaternion method regardless of the choice of equiv-alent clouds.
ACKNOWLEDGMENT
This research is supported by the BK21 project of theMinistry of Education & Human Resources Development,Korea. This work was also supported in part by the MRSECprogram of the National Science Foundation under AwardNo. DMR-0079996. The authors are thankful to N.R. Bartonand P.R. Dawson for their help.
APPENDIX A
24 cubic crystal symmetry in quaternion
1: q(1;0,0,0)2: q(0;1,0,0)3: q(0;0,1,0)4: q(0;0,0,1)5: q(0.5;0.5,0.5,0.5)6: q(0.5;–0.5,–0.5,–0.5)7: q(0.5;0.5,–0.5,0.5)8: q(0.5;–0.5,0.5,–0.5)9: q(0.5;–0.5,0.5,0.5)
10: q(0.5;0.5,–0.5,–0.5)11: q(0.5;–0.5,–0.5,0.5)12: q(0.5;0.5,0.5,–0.5)13: q(1/ ;1/ ,0,0)14: q(1/ ;0,1/ ,0)15: q(1/ ;0,0,1/ )16: q(1/ ;–1/ ,0,0)1212
121212121212
17: q(1/ ;0,–1/ ,0)18: q(1/ ;0,0,–1/ )19: q(0;1/ ,1/ ,0)20: q(0;–1/ ,1/ ,0)21: q(0;0,1/ ,1/ )22: q(0;0,–1/ ,1/ )23: q(0;1/ ,0,1/ )24: q(0;–1/ ,0,1/ )
APPENDIX B
Rotation matrix, quaternion, angle/axis, and Euler angles;each rotation can be represented as a 3 � 3 matrix; the transfor-mation between Euler angle and rotation matrix is found inReferences 12, 16, and 17
[B1]
The components are given here by {, �, �}:
g11 � cos cos � cos � � sin sin �g12 � sin cos � cos � � cos sin �g13 � �sin � cos �g21 � �cos cos � sin � � sin cos �g22 � �sin cos � sin � � cos cos �g23 � sin � sin �g31 � cos sin �g32 � sin sin �g33 � cos �
Thus, if the orientation is given in the form of a rotation matrix,then the angle/axis of rotation is given by
[B2]
The rotation matrix belonging to �q is given as
[B3]
The rotation matrix is also expressed with a rotation angle� and axis n � (n1,n2,n3):
[B4]
Where a � cos (�) and b � sin (�).
REFERENCES1. V. Randle: Microtexture Determination, Institute of Materials, London,
1992.2. S.I. Wright, B.L. Adams, and K. Kunze: Mater. Sci. Eng., 1993,
vol. A160, pp. 229-40.
°(1� a)n2
1 � a (1 � a)n1n2 � n3b (1 � a)n1n3 � n2b
(1 � a)n1n2 � n3b (1 � a)n22 � a (1 � a)n2n3 � n1b
(1� a)n1n3 � n2b (1� a)n2n3 � n1b (1 �a)n23 � a
¢
°q2
0 �q21 � q2
2 �q23 2(q1q2 � q0q3) 2(q1q3 �q0q2)
2(q1q2 �q0q3) q20 � q2
1 � q22 � q2
3 2(q2q3 �q0q1)
2(q1q3 � q0q2) 2(q2q3 � q0q1) q20 � q2
1 �q22 � q2
3
¢
n �{g23 � g32, g31 � g13, g12 � g21}
1(g23 � g32)2 � (g31 � g13)
2 � (g12 � g21)2
cos v � (trace (g) � 1)/2; trace (g) � g11 � g22 � g33
g � °g11 g12 g13
g21 g22 g23
g31 g32 g33
¢
12121212121212121212121212121212

3438—VOLUME 36A, DECEMBER 2005 METALLURGICAL AND MATERIALS TRANSACTIONS A
3. FJ. Humphreys: J Mater. Sci., 2001, vol. 36, pp.3833-54.4. N.R. Barton and P.R. Dawson: Metall. Mater. Trans. A, 2001, vol. 32A,
pp. 1967-75.5. N.C. Krieger Lassen and D.J. Jensen: Acta Cryst., 1994, vol. A50,
pp. 741-48.6. C.G. Khatri and K.V. Mardia: J.R. Stat. Soc. B, 1977, vol. 39,
pp. 95-106.7. K. Kunze, S.I. Wright, B.L. Adams, and D.J. Dingley: Text. Microsc.,
1993, vol. 20, pp. 41-54.8. M. Humbert, N. Gey, J. Muller, and C. Esling: J. Appl. Cryst., 1996,
vol. 29, pp. 662-66.9. A. Morawiec: J. Appl. Cryst., 1998, vol. 31, p. 484.
10. M. Humbert, N. Gey, J. Muller, and C. Esling: J. Appl. Cryst., 1998,vol. 31, p. 485.
11. A. Morawiec: J. Appl. Cryst., 1998, vol. 31, pp. 818-19.12. OIM 2.6, Software for Analysis of Electron Backscatter Diffraction
Patterns, User manual, EDAX-TSL, NJ, 1993-97.13. H.J. Bunge: Quantitative Texture Analysis, Dgm Metallurgy Information,
Germany, 1987.
14. V. Randle: Electron Backscatter Diffraction in Materials Science,Kluwer Academic Plenum Publishers, New York, NY, 2000.
15. S.L. Altmann: Rotations, Quaternions and Double Groups, ClarendonPress Oxford, UK, 1986.
16. H.J. Bunge: Texture Analysis in Materials Science, Butterworth andCo., London, 1982.
17. S. Matthies, G.W. Vinel, and K. Helming: Standard Distributions inTexture Analysis, Akademie- Verlag, Berlin, 1987.
18. V. Randle: The Measurement of Grain Boundary Geometry, Instituteof Physics Publishing, London, 1993.
19. A. Heinz and P. Neumann: Acta Cryst., 1991, vol. A47, pp. 780-89.20. Simon L. Altmann: Rotations, Quaternions and Double Groups,
Clarendon Press, Oxford, United Kingdom, 1986.21. S.I. Wright and B.L. Adams: Metall. Trans. A, 1992, vol. 23A, pp. 759-67.22. Hans-Paul Schwefel: Evolution and Optimum Seeking, John Wiley &
Sons, New York, NY, 1995.23. REDS, Repressing of EBSD Data in Seoul National University, User
Manual, Texture Control Lab, South Korea, 2002.24. D.I. Kim: Ph.D. Thesis, Seoul National University, Seoul, 2002.